

Philips SCC2698BC1A84 Datasheet
INTEGRATED CIRCUITS
SCC2698B
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
Product specification
Supersedes data of 1995 May 01
IC19 Data Handbook
1998 Sep 04
Philips Semiconductors Product specification
PACKAGES
DWG #
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
DESCRIPTION
The SCC2698B Enhanced Octal Universal Asynchronous
Receiver/Transmitter (Octal UART) is a single chip MOS-LSI
communications device that provides eight full-duplex asynchronous
receiver/transmitter channels in a single package. It is fabricated
with CMOS technology which combines the benefits of high density
and low power consumption.
The operating speed of each receiver and transmitter can be
selected independently as one of eighteen fixed baud rates, a 16X
clock derived from a programmable counter/timer, or an external 1X
or 16X clock. The baud rate generator and counter/timer can
operate directly from a crystal or from external clock inputs. The
ability to independently program the operating speed of the receiver
and transmitter make the Octal UART particularly attractive for
dual-speed channel applications such as clustered terminal
systems.
The receiver is quadruple buffered to minimize the potential of
receiver overrun or to reduce interrupt overhead in interrupt driven
systems. In addition, a handshaking capability is provided to disable
a remote UART transmitter when the receiver buffer is full.
The UART provides a power-down mode in which the oscillator is
frozen but the register contents are stored. This results in reduced
power consumption on the order of several magnitudes. The Octal
UART is fully TTL compatible and operates from a single +5V power
supply.
The SCC2698B is an upwardly compatible version of the 2698A
Octal UART. In PLCC packaging, it is enhanced by the addition of
receiver ready or FIFO full status outputs, and transmitter empty
status outputs for each channel on 16 multipurpose I/O pins. The
multipurpose I/O pins of the SCC2698B were inputs only on the
SCC2698A.
SCC2698B
FEATURES
• Eight full-duplex independent asynchronous receiver/
transmitters
• Quadruple buffered receiver data register
• Programmable data format:
– 5 to 8 data bits plus parity
– Odd, even, no parity or force parity
– 1, 1.5 or 2 stop bits programmable in 1/16-bit incre-
ments
• Baud rate for the receiver and transmitter selectable from:
– 18 fixed rates: 50 to 38.4K baud
Non-standard rates to 1 15.2K baud
– User-defined rates from the programmable counter/tim-
er associated with each of four blocks
– External 1x or 16x clock
• Parity, framing, and overrun error detection
• False start bit detection
• Line break detection and generation
• Programmable channel mode
– Normal (full-duplex), automatic echo, local loop back,
remote loopback
• Four multi-function programmable 16-bit counter/timers
• Four interrupt outputs with eight maskable interrupting
conditions for each output
• Receiver ready/FIFO full and transmitter ready status
available on 16 multi-function pins in PLCC package
• On-chip crystal oscillator
• TTL compatible
• Single +5V power supply with low power mode
• Eight multi-purpose output pins
• Sixteen multi-purpose I/O pins
• Sixteen multi-purpose Input pins with pull-up resistors
ORDERING INFORMATION
COMMERCIAL INDUSTRIAL
VCC = +5V +5%, TA = 0°C to +70°C VCC = +5V +5%, TA = –40°C to +85°C
84-Pin Plastic Leaded Chip Carrier (PLCC) SCC2698BC1A84 SCC2698BE1A84 SOT189-3
NOTE: Pin Grid Array (PGA) package version is available from Philips Components Military Division.
DD
1
PARAMETER RATING UNIT
to GND
2
3
3
2
Note 4
–0.5 to +7.0 V
–0.5 to V
+0.5 V
CC
o
C
o
C
ABSOLUTE MAXIMUM RATINGS
SYMBOL
T
A
T
STG
V
CC
V
S
P
D
NOTES:
1. Stresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only and
functional operation of the device at these or any other condition above those indicated in the operation section of this specification is not
implied.
2. For operating at elevated temperatures, the device must be derated based on +150°C maximum junction temperature.
3. This product includes circuitry specifically designed for the protection of its internal devices from damaging effects of excessive static
charge. Nonetheless, it is suggested that conventional precautions be taken to avoid applying any voltages larger than the rated maxima.
4. Parameters are valid over specified temperature range. See ordering information table for applicable temperature range and operating
supply range.
1998 Sep 04 853-1 127 19974
Operating ambient temperature range
Storage temperature range –65 to +150
Voltage from V
Voltage from any pin to ground
Power dissipation 1 W
Philips Semiconductors Product specification
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
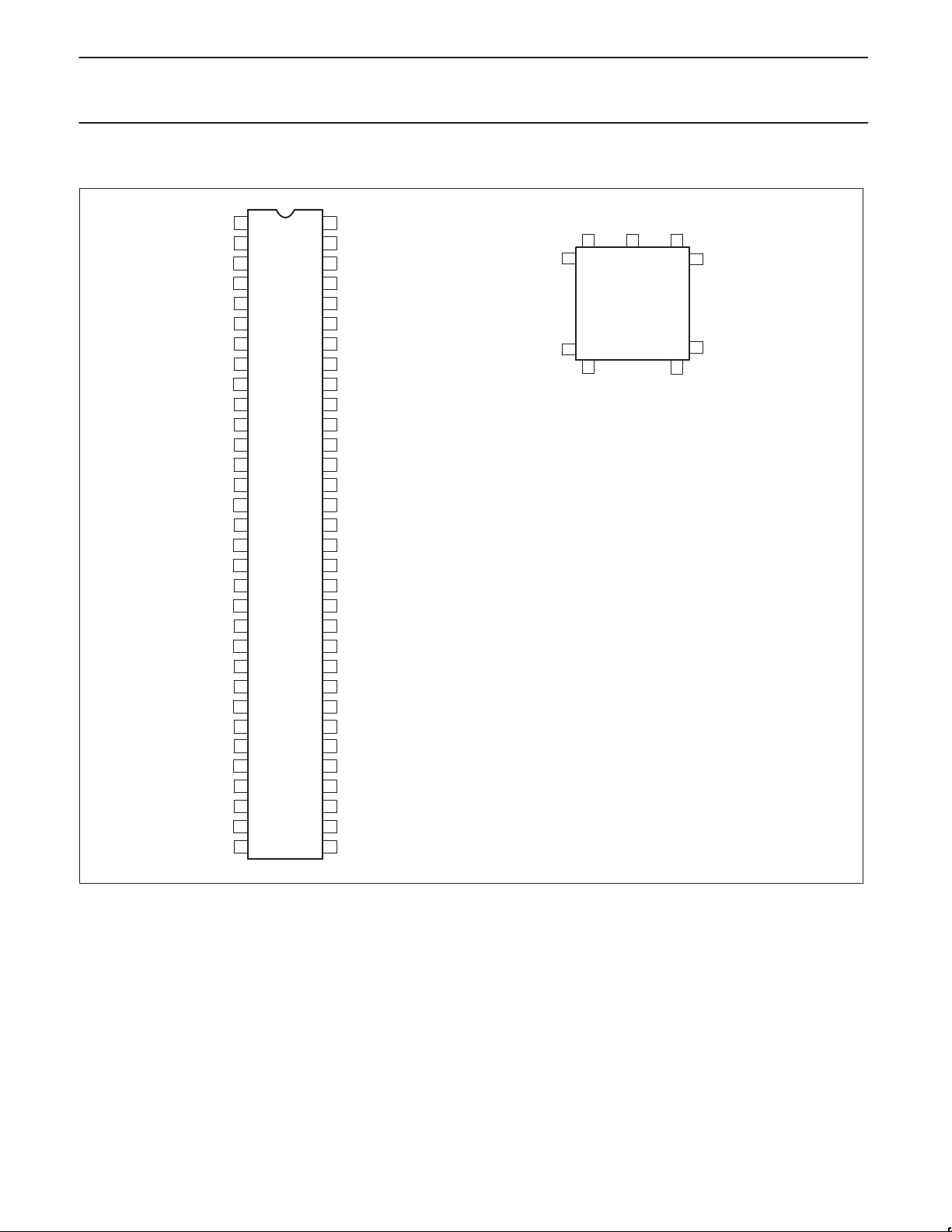
PIN CONFIGURATIONS
RxDa
V
CC
X2
X1/CLK
D0
D1
D2
NC
D3
NC
D4
NC
D5
RESET
D6
D7
CEN
WRN
GND
RDN
A0
A1
A2
A3
A4
A5
MP10a
MP10b
INTRAN
INTRBN
MP10c
MP10d
TxDb
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
49
48
47
45
45
44
43
42
41
40
39
38
37
36
35
34
33
TxDa
RxDc
TxDc
RxDe
MP10h
MP10g
RxDg
TxDe
TxDg
MPOa
MPOc
MPOe
MPOg
GND
MP10f
MP10e
RxDh
RxDf
RxDd
RxDb
TxDh
MPOh
Test input
MPOf
TxDf
MPOd
TxDd
INTRDN
INTRCN
V
CC
MPOb
SCC2698B
11
1
75
12
PLCC
32
33
Pin Function Pin Function Pin Function
1
TxDa
2
MPP2g
3
RxDa
4
MPP2h
5
V
CC
X2
6
X1/CLK
7
D0
8
D1
9
D2
10
D3
11
D4
12
D5
13
MPI1a
14
RESET
15
D6
16
D7
17
CEN
18
WRN
19
GND
20
MPI1b
21
RDN
22
A0
23
MPP1a
24
A1
25
MPP1b
26
A2
27
MPP2a
28
29
A3
30
MPP2b
31
A4
32
A5
33
MPI0a
34
MPI0b
35
INTRAN
36
INTRBN
37
MPI0c
38
MPI1c
39
MPI0d
40
MPI1d
41
TxDb
42
MPP1c
43
MPOb
44
MPP1d
45
V
CC
INTRCN
46
INTRDN
47
MPP2c
48
TxDd
49
MPP2d
50
MPOd
51
TxDf
52
MPOf
53
MPOh
54
TxDh
55
RxDb
56
74
54
53
57
RxDd
58
RxDf
59
RxDh
60
MPI1e
61
MPI0e
62
MPI1f
63
MPI0f
64
MPP1e
65
GND
66
MPP1f
67
MPOg
68
MPP2e
69
MPOe
70
MPP2f
71
MPOc
72
MPOa
73
TxDg
74
TxDe
75
RxDg
76
MPI0g
77
MPI0h
78
MPI1g
79
RxDe
80
MPIh
81
TxDc
82
MPP1g
83
RxDc
84
MPP1h
SD00184
1998 Sep 04
Figure 1. Pin Configurations
3
Philips Semiconductors Product specification
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
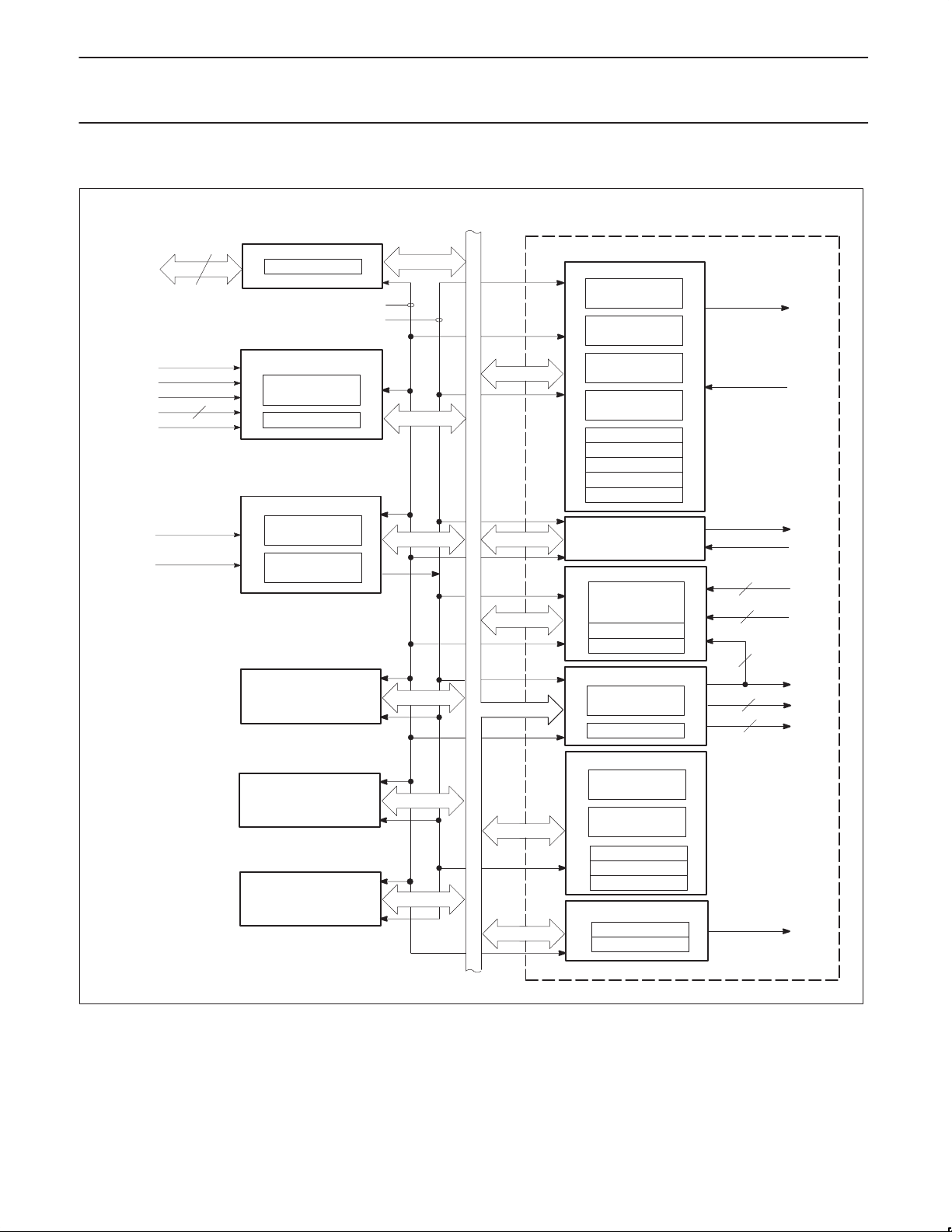
BLOCK DIAGRAM
D0–D7
RDN
WRN
CEN
A0–A5
RESET
X1/CLK
8
6
X2
BUS BUFFER
TIMING
CONTROL
OPERATION CONTROL
ADDRESS
DECODE
R/W CONTROL
TIMING
CRYSTAL
OSCILLATOR
POWER-ON
LOGIC
BLOCK B
(SAME AS A)
INTERNAL DATA
BUS
CHANNEL A
TRANSMIT HOLD
REGISTER
TRANSMIT SHIFT
REGISTER
RECEIVE HOLD
REGISTER (3)
RECEIVE SHIFT
REGISTER
MR1, 2
CR
SR
CSR Rx
CSR Tx
CHANNEL B
(AS ABOVE)
INPUT PORT
CHANGE-OF-
STATE
DETECTORS (4)
IPCR
ACR
OUTPUT PORT
FUNCTION SELECT
LOGIC
OPCR
SCC2698B
BLOCK A
TxDA
RxDA
TxDb
RxDb
4
MPI0
4
MPIb
4
MPP1
4
MPP2
2
MPO
1998 Sep 04
BLOCK C
(SAME AS A)
BLOCK D
(SAME AS A)
Figure 2. Block Diagram
4
TIMING
CLOCK
SELECTORS
COUNTER/
TIMER
ACR
CTUR
CTLR
INTERRUPT CONTROL
IMR
ISR
INTRAN
SD00185
Philips Semiconductors Product specification
MNEMONIC
PIN
TYPE
NAME AND FUNCTION
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
PIN DESCRIPTION
PIN
NO.
D0–D7 8–13,
CEN 18 I Chip Enable: Active-Low input. When Low, data transfers between the CPU and the Octal UART are
WRN 19 I Write Strobe: Active-Low input. A Low on this pin while CEN is Low causes the contents of the data
RDN 22 I Read Strobe: Active-Low input. A Low on this pin while CEN is Low causes the contents of the
A0–A5 23, 25,
RESET 15 I Reset: Master reset. A High on this pin clears the status register (SR), clears the interrupt mask
INTRAN–
INTRDN
X1/CLK 7 I Crystal 1: Crystal or external clock input. When using the crystal oscillator, this pin serves as the
X2 6 I Crystal 2: Connection for other side of crystal. If an external source is used instead of a crystal, this
RxDa–RxDh 3, 56,
TxDa–TxDh 1, 41,
MPOa–MPOh 72, 43,
MPI0a–MPI0h 33, 34,
16, 17
27, 29,
31, 32
35, 36,
46, 47
83, 57,
79, 58,
75, 59
81, 49,
74, 52,
73, 55
71, 51,
69, 53,
67, 54
37, 39,
61, 63,
76, 77
I/O Data Bus: Active–High 8-bit bidirectional 3-State data bus. Bit 0 is the LSB and bit 7 is the MSB. All
data, command, and status transfers between the CPU and the Octal UART take place over this bus.
The direction of the transfer is controlled by the WRN and RDN inputs when the CEN input is low.
When the CEN input is High, the data bus is in the 3-State condition.
enabled on D0–D7 as controlled by the WRN, RDN and A0–A5 inputs. When CEN is High, the Octal
UART is effectively isolated from the data bus and D0–D7 are placed in the 3-State condition.
bus to be transferred to the register selected by A0–A5. The transfer occurs on the trailing (rising)
edge of the signal.
register selected by A0–A5 to be placed on the data bus. The read cycle begins on the leading
(falling) edge of RDN.
I Address Inputs: Active-High address inputs to select the Octal UART registers for read/write
operations.
register (IMR), clears the interrupt status register (ISR), clears the output port configuration register
(OPCR), places the receiver and transmitter in the inactive state causing the TxD output to go to the
marking (High) state, and stops the counter/timer. Clears power-down mode and interrupts. Clears
Test Modes, sets MR pointer to MR1.
O Interrupt Request: This active-Low open drain output is asserted on occurrence of one or more of
eight maskable interrupting conditions. The CPU can read the interrupt status register to determine
the interrupting condition(s).
connection for one side of the crystal. If a crystal is not used, an external clock is supplied at this
input. An external clock (or crystal) is required even if the internal baud rate generator is not utilized.
This clock is used to drive the internal baud rate generator, as an optional input to the timer/counter,
and to provide other clocking signals required by the chip.
connection should be left open (see Figure 7).
I Receiver Serial Data Input: The least significant bit is received first. If external receiver clock is
specified, this input is sampled on the rising edge of the clock. If internal clock is used, the RxD input
is sampled on the rising edge of the RxC1x signal as seen on the MPO pin.
O Transmitter Serial Data Output: The least significant bit is transmitted first. This output is held in the
marking (High) condition when the transmitter is idle or disabled and when the Octal UART is
operating in local loopback mode. If external transmitter is specified, the data is shifted on the falling
edge of the transmitter clock. If internal clock is used, the TxD output changes on the falling edge of
the TxC1x signal as seen on the MPO pin.
O Multi-Purpose Output: Each of the four DUARTS has two MPO pins (one per UART). One of the
following eight functions can be selected for this output pin by programming the OPCR (output port
configuration register). Note that reset conditions MPO pins to RTSN.
RTSN – Request to send active-Low output. This output is asserted and negated via the command
register. By appropriate programming of the mode registers, (MR1[7])=1 R TSN can be programmed to
be automatically reset after the character in the transmitter is completely shifted or when the receiver
FIFO and shift register are full. RTSN is an internal signal which normally represents the condition of
the receiver FIFO not full, i.e., the receiver can request more data to be sent. However, it can also be
controlled by the transmitter empty and the commands 8h and 9h written to the CR (command
register).
C/TO – The counter/timer output.
TxC1X – The 1X clock for the transmitter.
TxC16X – The 16X clock for the transmitter.
RxC1X – The 1X clock for the receiver.
RxC16X – The 16X clock for the receiver.
TxRDY – Transmitter holding register empty signal.
RxRDY/FFULL – Receiver FIFO not empty/full signal.
I Multi-Purpose Input 0: This pin (one in each UART) is programmable. Its state can always be read
through the IPCR bit 0, or the IPR bit 0.
CTSN: By programming MR2[4] to a 1, this input controls the clear-to-send function for the
transmitter. It is active low. This pin is provided with a change-of-state detector.
SCC2698B
1998 Sep 04
5
Philips Semiconductors Product specification
MNEMONIC
PIN
TYPE
NAME AND FUNCTION
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
PIN DESCRIPTION (Continued)
PIN
NO.
MPI1a–MPI1h 14, 21,
MPP1a–MPP1h 24, 26,
MPP2a–MPP2h 28, 30,
Test Input – I T est Input: This pin is used as an input for test purposes at the factory while in test mode. This pin
V
CC
GND 20, 65 I Ground
38, 40,
60, 62,
78, 80
42, 44,
64, 66,
82, 84
48, 50,
68, 70,
2, 4
5, 45 I Power Supply: +5V supply input.
I Multi-Purpose Input 1: This pin (one for each unit) is programmable. Its state can always be
determined by reading the IPCR bit 1 or IPR bit 1.
C/TCLK – This input will serve as the external clock for the counter/timer when ACR[5] is set to 0.
This occurs only for channels a, c, e, and g since there is one counter/timer for each DUART block.
This pin is provided with a change-of-state detector.
I/O Multi-Purpose Pin 1: This pin (one for each UART) is programmed to be an input or an output
according to the state of OPCR[7]. (0 = input, 1 = output). The state of the multi-purpose pin can
always be determined by reading the IPR. When programmed as an input, it will be the transmitter
clock (TxCLK). It will be 1x or 16x according to the clock select registers (CSR[3.0]). When
programmed as an output, it will be the status register TxRDY bit. These pins have a small pull-up
device.
I/O Multi-Purpose Pin 2: This pin (one for each UART) is programmed to be an input or an output
according to the state of OPCR[7]. (0 = input, 1 = output). The state of the multi-purpose pin can
always be determined by reading the IPR. When programmed as an input, it will be the receiver clock
(RxCLK). It will be 1x or 16x according to the clock select registers (CSR[7:4). When programmed as
an output, it will be the ISR status register RxRDY/FIFO full bit. These pins have a small pull-up
device.
can be treated as ‘N/C’ by the user. It can be tied high, or left open.
SCC2698B
BLOCK DIAGRAM
As shown in the block diagram, the Octal UART consists of: data
bus buffer, interrupt control, operation control, timing, and eight
receiver and transmitter channels. The eight channels are divided
into four different blocks, each block independent of each other (see
Figure 3).
BLOCK A
CHANNELS a, b
BLOCK B
CHANNELS c, d
Figure 3. Channel Architecture
BLOCK C
CHANNELS e, f
BLOCK D
CHANNELS g, h
SD00186
Channel Blocks
There are four blocks (Figure 3), each containing two sets of
receiver/transmitters. In the following discussion, the description
applies to Block A which contains channels a and b. However, the
same information applies to all channel blocks.
Data Bus Buffer
The data bus buffer provides the interface between the external and
internal data buses. It is controlled by the operation control block to
allow read and write operations to take place between the controlling
CPU and the Octal UART.
Interrupt Control
A single interrupt output per block (INTRN) is provided which is
asserted on occurrence of any of the following internal events:
–Transmit holding register ready for each channel
–Receive holding register ready or FIFO full for each channel
–Change in break received status for each channel
–Counter reached terminal count
–Change in MPI input
Associated with the interrupt system are the interrupt mask register
(IMR) and the interrupt status register (ISR). The IMR can be
programmed to select only certain conditions, of the above, to cause
INTRN to be asserted. The ISR can be read by the CPU to
determine all currently active interrupting conditions. However, the
bits of the ISR are not masked by the IMR. The transmitter ready
status and the receiver ready or FIFO full status can be provided on
MPP1a, MPP1b, MPP2a, and MPP2b by setting OPCR[7]. these
outputs are not masked by IMR.
Operation Control
The operation control logic receives operation commands from the
CPU and generates appropriate signals to internal sections to
control device operation. It contains address decoding and read and
write circuits to permit communications with the microprocessor via
the data bus buffer. The functions performed by the CPU read and
write operations are shown in Table 1.
Mode registers 1 and 2 are accessed via an auxiliary pointer. The
pointer is set to MR1 by RESET or by issuing a reset pointer
command via the command register . Any read or write of the mode
register while the pointer is at MR1 switches the pointer to MR2. The
pointer then remains at MR2 so that subsequent accesses are to
MR2, unless the pointer is reset to MR1 as already described.
Timing Circuits
The timing block consists of a crystal oscillator, a baud rate
generator, a programmable 16-bit counter/timer for each block, and
two clock selectors.
Crystal Clock
The crystal oscillator operates directly from a 3.6864MHz crystal
connected across the X1/ CLK and X2 inputs with a minimum of
external components. If an external clock of the appropriate
frequency is available, it may be connected to X1/CLK. If an external
clock is used instead of a crystal, X1 must be driven and X2 left
1998 Sep 04
6
Philips Semiconductors Product specification
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
floating as shown in Figure 7. The clock serves as the basic timing
reference for the baud rate generator (BRG), the counter/timer, and
other internal circuits. A clock frequency, within the limits specified in
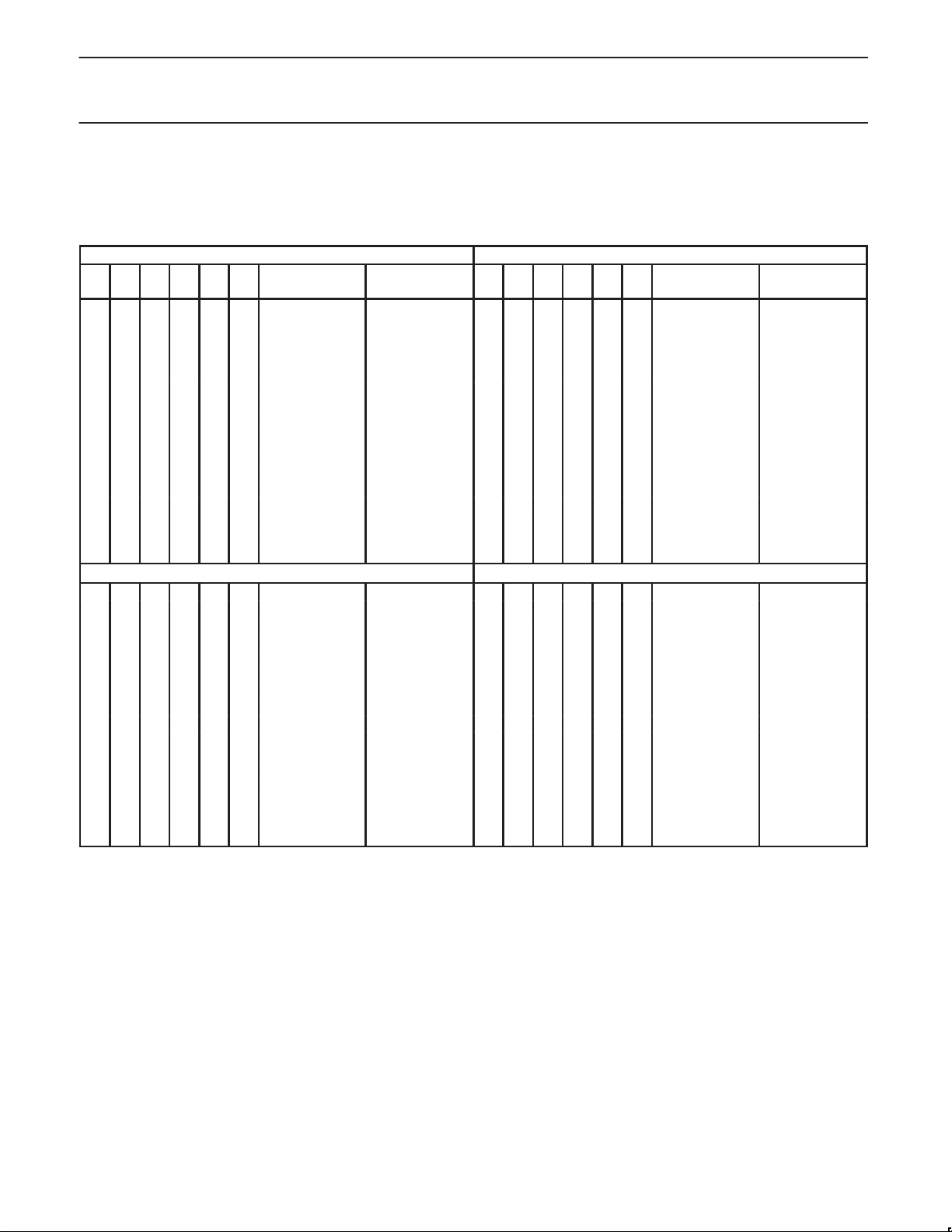
Table 1. Register Addressing
Units A and B Units E and F
A5 A4 A3 A2 A1 A0 READ (RDN=0)
WRITE
(WRN=0)
0 0 0 0 0 0 MR1a, MR2a MR1a, MR2a 1 0 0 0 0 0 MR1e, MR2e MR1e, MR2e
0 0 0 0 0 1 SRa CSRa 1 0 0 0 0 1 SRe CSRe
0 0 0 0 1 0 BRG Test
2
CRa 1 0 0 0 1 0 Reserved
0 0 0 0 1 1 RHRa THRa 1 0 0 0 1 1 RHRe THRe
0 0 0 1 0 0 IPCRA ACRA 1 0 0 1 0 0 IPCRC ACRC
0 0 0 1 0 1 ISRA IMRA 1 0 0 1 0 1 ISRC IMRC
0 0 0 1 1 0 CTUA CTURA 1 0 0 1 1 0 CTUC CTURC
0 0 0 1 1 1 CTLA CTLRA 1 0 0 1 1 1 CTLC CTLRC
0 0 1 0 0 0 MR1b, MR2b MR1b, MR2b 1 0 1 0 0 0 MR1f, MR2f MR1f, MR2f
0 0 1 0 0 1 SRb CSRb 1 0 1 0 0 1 SRf CSRf
0 0 1 0 1 0 1X/16X Test
2
CRb 1 0 1 0 1 0 Reserved
0 0 1 0 1 1 RHRb THRb 1 0 1 0 1 1 RHRf THRf
0 0 1 1 0 0 Reserved
1
Reserved
1
0 0 1 1 0 1 Input port A OPCRA 1 0 1 1 0 1 Input port C OPCRC
0 0 1 1 1 0 Start C/T A Reserved
0 0 1 1 1 1 Stop C/T A Reserved
1
1
Units C and D Units G and H
0 1 0 0 0 0 MR1c, MR2c MR1c, MR2c 1 1 0 0 0 0 MR1g, MR2g MR1g, MR2g
0 1 0 0 0 1 SRc CSRc 1 1 0 0 0 1 SRg CSRg
0 1 0 0 1 0 Reserved
1
CRc 1 1 0 0 1 0 Reserved
0 1 0 0 1 1 RHRc THRc 1 1 0 0 1 1 RHRg THRg
0 1 0 1 0 0 IPCRB ACRB 1 1 0 1 0 0 IPCRD ACRD
0 1 0 1 0 1 ISRB IMRB 1 1 0 1 0 1 ISRD IMRD
0 1 0 1 1 0 CTUB CTURB 1 1 0 1 1 0 CTUD CTURD
0 1 0 1 1 1 CTLB CTLRB 1 1 0 1 1 1 CTLD CTLRD
0 1 1 0 0 0 MR1d, MR2d MR1d, MR2d 1 1 1 0 0 0 MR1h, MR2h MR1h, MR2h
0 1 1 0 0 1 SRd CSRd 1 1 1 0 0 1 SRh CSRh
0 1 1 0 1 0 Reserved
1
CRd 1 1 1 0 1 0 Reserved
0 1 1 0 1 1 RHRd THRd 1 1 1 0 1 1 RHRh THRh
0 1 1 1 0 0 Reserved
1
Reserved
1
0 1 1 1 0 1 Input port B OPCRB 1 1 1 1 0 1 Input port D OPCRD
0 1 1 1 1 0 Start C/T B Reserved
0 1 1 1 1 1 Stop C/T B Reserved
1
1
NOTE:
1. Reserved registers should never be read during normal operation since they are reserved for internal diagnostics.
ACR = Auxiliary control register SR = Status Register
CR = Command register THR = Tx holding register
CSR = Clock select register RHR = Rx holding register
CTL = Counter/timer lower IPCR = Input port change register
CTLR = Counter/timer lower register ISR = Interrupt status register
CTU = Counter/timer upper IMR = Interrupt mask register
CTUR = Counter/timer upper register OPCR= Output port configuration register
MR = Mode register
2. See T able 5 for BRG Test frequencies in this data sheet, and
and SCC2698B”
Philips Semiconductors ICs for Data Communications, IC-19, 1994.
“Extended baud rates for SCN2681, SCN68681, SCC2691, SCC2692, SCC68681
BRG
The baud rate generator operates from the oscillator or external
clock input and is capable of generating 18 commonly used data
communications baud rates ranging from 50 to 38.4K baud. Thirteen
of these are available simultaneously for use by the receiver and
transmitter. Eight are fixed, and one of two sets of five can be
selected by programming ACR[7]. The clock outputs from the BRG
are at 16X the actual baud rate. The counter/timer can be used as a
the electrical specifications, must be supplied even if the internal
BRG is not used.
A5 A4 A3 A2 A1 A0 READ (RDN=0)
1 0 1 1 0 0 Reserved
1 0 1 1 1 0 Start C/T C Reserved
1 0 1 1 1 1 Stop C/T C Reserved
1 1 1 1 0 0 Reserved
1 1 1 1 1 0 Start C/T D Reserved
1 1 1 1 1 1 Stop C/T D Reserved
timer to produce a 16X clock for any other baud rate by counting
down the crystal clock or an external clock. The clock selectors
allow the independent selection, by the receiver and transmitter, of
any of these baud rates or an external timing signal.
Counter/Timer (C/T)
There are four C/Ts in the Octal UART, one for each block. The C/T
operation is programmed by ACR[6:4]. One of eight timing sources
SCC2698B
WRITE
(WRN=0)
1
1
1
1
1
1
CRe
CRf
Reserved
CRg
CRh
Reserved
1
1
1
1
1
1
1998 Sep 04
7

Philips Semiconductors Product specification
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
can be used as the input to the C/T. The output of the C/T is
available to the clock selectors and can also be programmed by
OPCR[2:0] for channel a and OPCR[6:4] for channel b, to be output
on the MPOa or MPOb pin, respectively.
A register read address is reserved to issue a start counter/timer
command and a second register read address is reserved to issue a
stop counter/timer command for each timer. For example, to issue a
stop counter command for the counter-timer in block B, a read of
address ‘1F’ must be performed. See Table 1 for register addressing.
In the timer mode, the C/T generates a square wave whose period
is twice the number of clock periods loaded into the C/T upper and
lower registers. The counter ready bit in the ISR is set once each
cycle of the square wave. If the value in CTUR or CTLR is changed,
the current half-period will not be affected, but subsequent
half-periods will be affected. In this mode the C/T runs continuously
and does not recognize the stop C/T command (the command only
resets the counter ready bit in the ISR). Receipt of a start C/T
command causes the counter to terminate the current timing cycle
and to begin a new cycle using the values in CTUR and CTLR.
In the counter mode, the C/T counts down the number of pulses
loaded into CTUR and CTLR. Counting begins upon receipt of a
start counter command. Upon reaching terminal count, the counter
ready bit in the ISR is set. The counter continues counting past the
terminal count until stopped by the CPU. If MPO is programmed to
be the output of the C/T, the output remains High until terminal count
is reached, at which time it goes Low. The output returns to the High
state and the counter ready bit is cleared when the counter is
stopped by a stop counter command. The CPU may change the
values of CTUR and CTLR at any time, but the new count becomes
effective only on the next start counter command following a stop
counter command. If new values have not been loaded, the previous
count values are preserved and used for the next count cycle.
In the counter mode, the current value of the upper and lower eight
bits of the counter may be read by the CPU. It is recommended that
the counter be stopped when reading to prevent potential problems
which may occur if a carry from the lower eight bits to the upper eight
bits occurs between the times that both halves of the counter are read.
However, a subsequent start counter command causes the counter to
begin a new count cycle using the values in CTUR and CTLR.
Receiver and Transmitter
The Octal UART has eight full-duplex asynchronous
receiver/transmitters. The operating frequency for the receiver and
transmitter can be selected independently from the baud rate
generator, the counter/timer, or from an external input.
Registers associated with the communications channel are the
mode registers (MR1 and MR2), the clock select register (CSR), the
command register (CR), the status register (SR), the transmit
holding register (THR), and the receive holding register (RHR).
Transmitter
The transmitter accepts parallel data from the CPU and converts it
to a serial bit stream on the TxD output pin. It automatically sends a
start bit followed by the programmed number of data bits, an
optional parity bit, and the programmed number of stop bits. The
least significant bit is sent first. Following the transmission of the
stop bits, if a new character is not available in the THR, the TxD
output remains high and the TxEMT bit in the SR will be set to 1.
Transmission resumes and the TxEMT bit is cleared when the CPU
loads a new character in the THR. In the 16X clock mode, this also
re-synchronizes the internal 1X transmitter clock so that
transmission of the new character begins with minimum delay.
SCC2698B
The transmitter can be forced to send a break (continuous Low
condition) by issuing a start break command via the CR. The break is
terminated by a stop break command. If the transmitter is disabled, it
continues operating until the characters currently being transmitted and
the character in the THR, if any, are completely sent out. Characters
cannot be loaded in the THR while the transmitter is disabled.
Receiver
The receiver accepts serial data on the RxD pin, converts the serial
input to parallel format, checks for start bit, stop bit, parity bit (if any),
or break condition, and presents the assembled character to the
CPU. The receiver looks for a High-to-Low (mark-to-space)
transition of the start bit on the RxD input pin. If a transition is
detected, the state of the RxD pin is sampled again each 16X clock
for 7-1/2 clocks (16X clock mode) or at the next rising edge of the bit
time clock (1X clock mode).
If RxD is sampled High, the start bit is invalid and the search for a
valid start bit begins again. If RxD is still Low, a valid start bit is
assumed and the receiver samples the input. This continues at one
bit time intervals, at the theoretical center of the bit, until the proper
number of data bits and the parity bit (if any) have been assembled,
and one stop bit has been detected. The data is then transferred to
the RHR and the RxRDY bit in the SR is set to a one. If the
character length is less than eight bits, the most significant unused
bits in the RHR are set to zero.
After the stop bit is detected, the receiver will immediately look for
the next start bit. However, if a non-zero character was received
without a stop bit (i.e. framing error) and RxD remains low for
one-half of the bit period after the stop bit was sampled, then the
receiver operates as if a new start bit transition had been detected at
that point (one-half bit time after the stop bit was sampled). The
parity error, framing error and overrun error (if any) are strobed into
the SR at the received character boundary, before the RxRDY
status bit is set.
If a break condition is detected (RxD is low for the entire character
including the stop bit), only one character consisting of all zeros will
be loaded in the FIFO and the received break bit in the SR is set to
1. The RxD input must return to high for two (2) clock edges of the
X1 crystal clock for the receiver to recognize the end of the break
condition and begin the search for a start bit. This will usually
require a high time of one X1 clock period or 3 X1 edges since
the clock of the controller is not synchronous to the X1 clock.
TIMEOUT MODE
The timeout mode uses the received data stream to control the
counter. Each time a received character is transferred from the shift
register to the RHR, the counter is restarted. If a new character is
not received before the counter reaches zero count, the counter
ready bit is set, and an interrupt can be generated. This mode can
be used to indicate when data has been left in the Rx FIFO for more
than the programmed time limit. Otherwise, if the receiver has been
programmed to interrupt the CPU when the receive FIFO is full, and
the message ends before the FIFO is full, the CPU may not know
when there is data left in the FIFO, The CTU and CTL value would
be programmed for just over one character time, so that the CPU
would be interrupted as soon as it has stopped receiving continuous
data. This mode can also be used to indicate when the serial line
has been marking for longer than the programmed time limit. In this
case, the CPU has read all of the characters from the FIFO, but the
last character received has started the count. If there is no new data
during the programmed time interval, the counter ready bit will get
set, and an interrupt can be generated.
1998 Sep 04
8

Philips Semiconductors Product specification
Enhanced octal universal asynchronous
receiver/transmitter (Octal UART)
This mode is enabled by writing the appropriate command to the
command register. Writing an ‘Ax’ to CRA or CRB will invoke the
timeout mode for that channel. Writing a ‘Cx’ to CRA or CRB will
disable the timeout mode. The timeout mode should only be used by
one channel at once, since it uses the C/T. CTU and CTL must be
loaded with a value greater than the normal receive character
period. The timeout mode disables the regular STAR T/STOP
counter commands and puts the C/T into counter mode under the
control of the received data stream. Each time a received character
is transferred from the shift register to the RHR, the C/T is stopped
after one C/T clock, reloaded with the value in CTU and CTL and
then restarted on the next C/T clock. If the C/T is allowed to end the
count before a new character has been received, the counter ready
bit, ISR[3], will be set. If IMR[3] is set, this will generate an interrupt.
Since receiving a character restarts the C/T, the receipt of a
character after the C/T has timed out will clear the counter ready bit,
ISR[3], and the interrupt. Invoking the ‘Set Timeout Mode On’
command, CRx=‘Ax’, will also clear the counter ready bit and stop
the counter until the next character is received.
This mode is cleared by “Disable Time-out Mode” command (C0) to
the command register.
Time Out Mode Caution
When operating in the special time out mode, it is possible to
generate what appears to be a “false interrupt”, i.e., an interrupt
without a cause. This may result when a time-out interrupt occurs
and then, BEFORE the interrupt is serviced, another character is
received, i.e., the data stream has started again. (The interrupt
latency is longer than the pause in the data strea.) In this case,
when a new character has been receiver, the counter/timer will be
restarted by the receiver, thereby withdrawing its interrupt. If, at this
time, the interrupt service begins for the previously seen interrupt, a
read of the ISR will show the “Counter Ready” bit not set. If nothing
else is interrupting, this read of the ISR will return a x’00 character.
RECEIVER FIFO
The RHR consists of a first-in-first-out (FIFO) with a capacity of
three characters. Data is loaded from the receive shift register into
the top-most empty position of the FIFO. The RxRDY bit in the
status register (SR) is set whenever one or more characters are
available to be read, and a FFULL status bit is set if all three stack
positions are filled with data. Either of these bits can be selected to
cause an interrupt. A read of the RHR, outputs the data at the top of
the FIFO. After the read cycle, the data FIFO and its associated
status bits are ‘popped’ thus emptying a FIFO position for new data.
Receiver Status Bits
In addition to the data word, three status bits (parity error, framing
error, and received break) are appended to each data character in
the FIFO. Status can be provided in two ways, as programmed by
the error mode control bit in the mode register. In the ‘character’
mode, status is provided on a character-by-character basis: the
status applies only to the character at the top of the FIFO. In the
‘block’ mode, the status provided in the SR for these three bits is the
logical OR of the status for all characters coming to the top of the
FIFO since the last reset error command was issued. In either
mode, reading the SR does not affect the FIFO. The FIFO is
‘popped’ only when the RHR is read. Therefore, the SR should be
read prior to reading the corresponding data character.
If the FIFO is full when a new character is received, that character is
held in the receive shift register until a FIFO position is available. If
an additional character is received while this state exists, the
SCC2698B
contents of the FIFO are not affected: the character previously in the
shift register is lost and the overrun error status bit, SR[4], will be set
upon receipt of the start bit of the new (overrunning) character.
The receiver can control the deactivation of RTS. If programmed to
operate in this mode, the RTSN output will be negated when a valid
start bit was received and the FIFO is full. When a FIFO position
becomes available, the RTSN output will be re-asserted
automatically. This feature can be used to prevent an overrun, in
the receiver, by connecting the RTSN output to the CTSN input of
the transmitting device.
Receiver Reset and Disable
Receiver disable stops the receiver immediately – data being
assembled if the receiver shift register is lost. Data and status in the
FIFO is preserved and may be read. A re-enable of the receiver
after a disable will cause the receiver to begin assembling
characters at the next start bit detected. A receiver reset will discard
the present shift register data, reset the receiver ready bit (RxRDY),
clear the status of the byte at the top of the FIFO and re-align the
FIFO read/write pointers. This has the appearance of “clearing or
flushing” the receiver FIFO. In fact, the FIFO is NEVER cleared!
The data in the FIFO remains valid until overwritten by another
received character. Because of this, erroneous reading or extra
reads of the receiver FIFO will miss-align the FIFO pointers and
result in the reading of previously read data. A receiver reset will
re-align the pointers.
WAKE-UP MODE
In addition to the normal transmitter and receiver operation
described above, the Octal UART incorporates a special mode
which provides automatic wake-up of the receiver through address
frame recognition for multiprocessor communications. This mode is
selected by programming bits MR1[4:3] to ‘11’.
In this mode of operation, a ‘master’ station transmits an address
character followed by data characters for the addressed ‘slave’
station. The slave stations, whose receivers are normally disabled,
examine the received data stream and ‘wake-up’ the CPU [by
setting RxRDY) only upon receipt of an address character. The CPU
compares the received address to its station address and enables
the receiver if it wishes to receive the subsequent data characters.
Upon receipt of another address character, the CPU may disable the
receiver to initiate the process again.
A transmitted character consists of a start bit, the programmed
number of data bits, an address/data (A/D) bit, and the programmed
number of stop bits. The polarity of the transmitted A/D bit is
selected by the CPU by programming bit MR1[2]; MR1[2] = 0
transmits a zero in the A/D bit position which identifies the
corresponding data bits as data; MR1[2] = 1 transmits a one in the
A/D bit position which identifies the corresponding data bits as an
address. The CPU should program the mode register prior to
loading the corresponding data bits in the THR.
While in this mode, the receiver continuously looks at the received
data stream, whether it is enabled or disabled. If disabled, it sets the
RxRDY status bit and loads the character in the RHR FIFO if the
received A/D bit is a one, but discards the received character if the
received A/D bit is a zero. If enabled, all received characters are
then transferred to the CPU via the RHR. In either case, the data
bits are loaded in the data FIFO while the A/D bit is loaded in the
status FIFO position normally used for parity error (SR[5]). Framing
error, overrun error, and break detect operate normally whether or
not the receiver is enabled.
1998 Sep 04
9
 Loading...
Loading...