

INTEGRATED CIRCUITS
SCC2691
Universal asynchronous
receiver/transmitter (UART)
Product specification
Supersedes data of 1995 May 01
IC19 Data Handbook
1998 Sep 04
Philips Semiconductors Product specification
SCC2691Universal asynchronous receiver/transmitter (UART)
DESCRIPTION
The Philips Semiconductors SCC2691 Universal Asynchronous
Receiver/Transmitter (UART) is a single-chip CMOS-LSI
communications device that provides a full-duplex asynchronous
receiver/transmitter. It is fabricated with Philips Semiconductors
CMOS technology which combines the benefits of high density and
low power consumption.
The operating speed of the receiver and transmitter can be selected
independently as one of 18 fixed baud rates, a 16X clock derived
from a programmable counter/timer, or an external 1X or 16X clock.
The baud rate generator and counter/timer can operate directly from
a crystal or from external clock inputs. The ability to independently
program the operating speed of the receiver and transmitter make
the UART particularly attractive for dual-speed channel applications
such as clustered terminal systems.
The receiver is quadruple buffered to minimize the potential of
receiver overrun or to reduce interrupt overhead in interrupt driven
systems. In addition, a handshaking capability is provided to disable
a remote UART transmitter when the receiver buffer is full.
The UART provides a power-down mode in which the oscillator is
frozen but the register contents are stored. This results in reduced
power consumption on the order of several magnitudes.
The UART is fully TTL compatible and operates from a single +5V
power supply.
FEA TURES
•Full-duplex asynchronous receiver/transmitter
•Quadruple buffered receiver data register
•Programmable data format:
– 5 to 8 data bits plus parity
– Odd, even, no parity or force parity
– 1, 1.5 or 2 stop bits programmable in 1/16-bit increments
•16-bit programmable Counter/Timer
•Baud rate for the receiver and transmitter selectable from:
– 22 fixed rates: 50 to 115.2K baud
– Non-standard rates to 115.2kb
– Non-standard user-defined rate derived from programmable
timer/ counter
– External 1X or 16X clock
•Parity, framing, and overrun detection
•False start bit detection
•Line break detection and generation
•Programmable channel mode
– Normal (full-duplex)
– Automatic echo
– Local loopback
– Remote Loopback
•Multi-function programmable 16-bit counter/timer
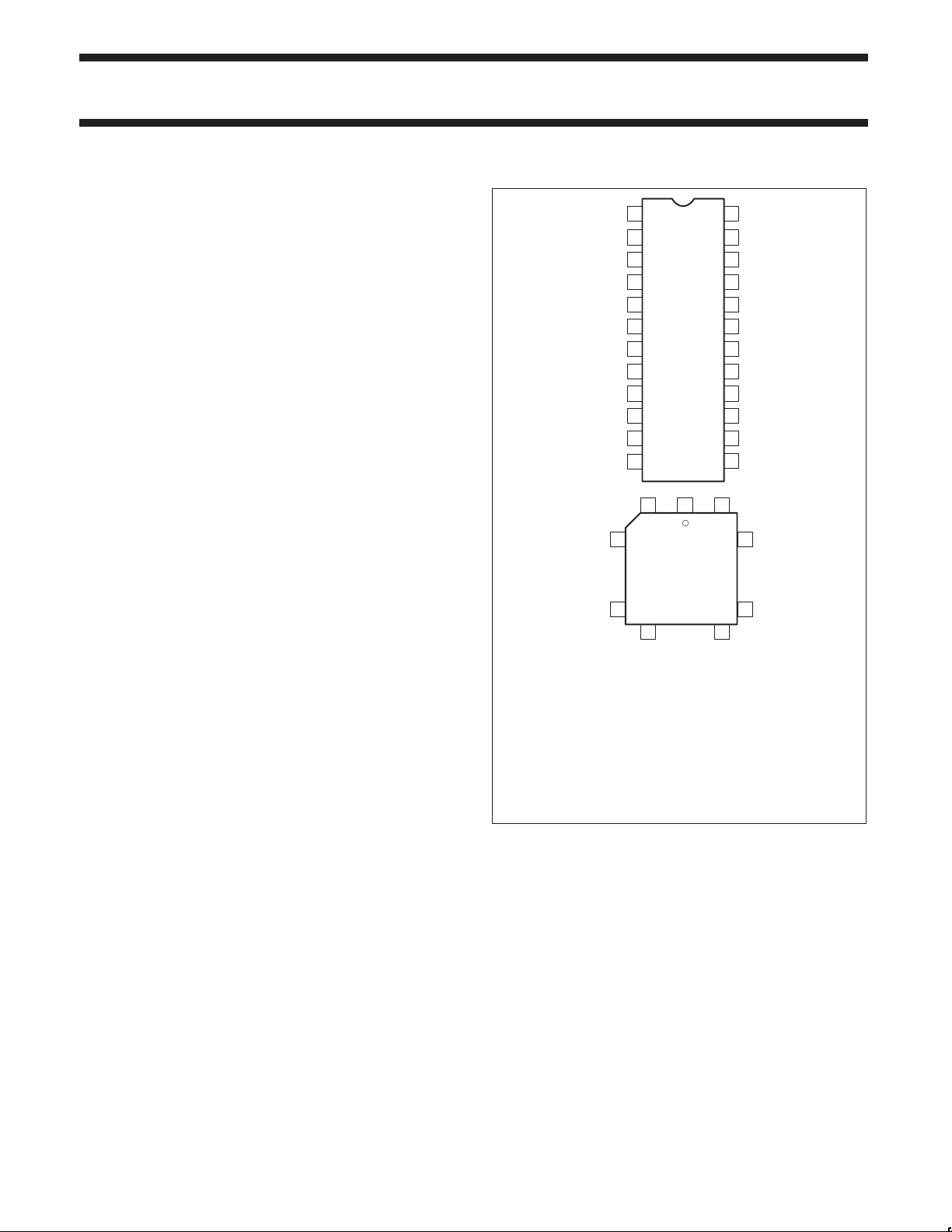
PIN CONFIGURATIONS
1
RDN
2
RxD
3
TxD
4
MPO
5
MPI
N24
6
A2
A1
A0
X1/CLK
X2
RESET
GND
5
11
Pin Symbol Pin Symbol
1
2
3
4
5
6
7
8
9
10
11
12
13
14
AND
D24
7
PACKAGES
8
9
10
11
12
4126
A28
PACKAGE
V
CC
RDN
RxD
TxD
MPO
MPI
NC
NC
A2
A1
A0
X1/CLK
X2
RESET
Figure 1. Pin Configurations
24
V
CC
23
WRN
22
D0
21
D1
20
D2
19
D3
18
D4
17
D5
16
D6
D7
15
14
CEN
13
INTRN
25
19
1812
15
GND
16
INTRN
17
CEN
18
D7
19
D6
20
D5
21
D4
22
D3
23
NC
24
D2
25
D1
26
NC
27
D0
28
WRN
SD00122
•Single interrupt output with seven maskable interrupting
conditions
•On-chip crystal oscillator
•Low power mode
•TTL compatible
•Single +5V power supply
•Commercial (0°C to +70°C) and industrial (-40°C to +85°C)
temperature versions available
•SOL, PLCC and 300 mil wide DIP packages available
1998 Sep 04 853–1078 19971
2
Philips Semiconductors Product specification
SCC2691Universal asynchronous receiver/transmitter (UART)
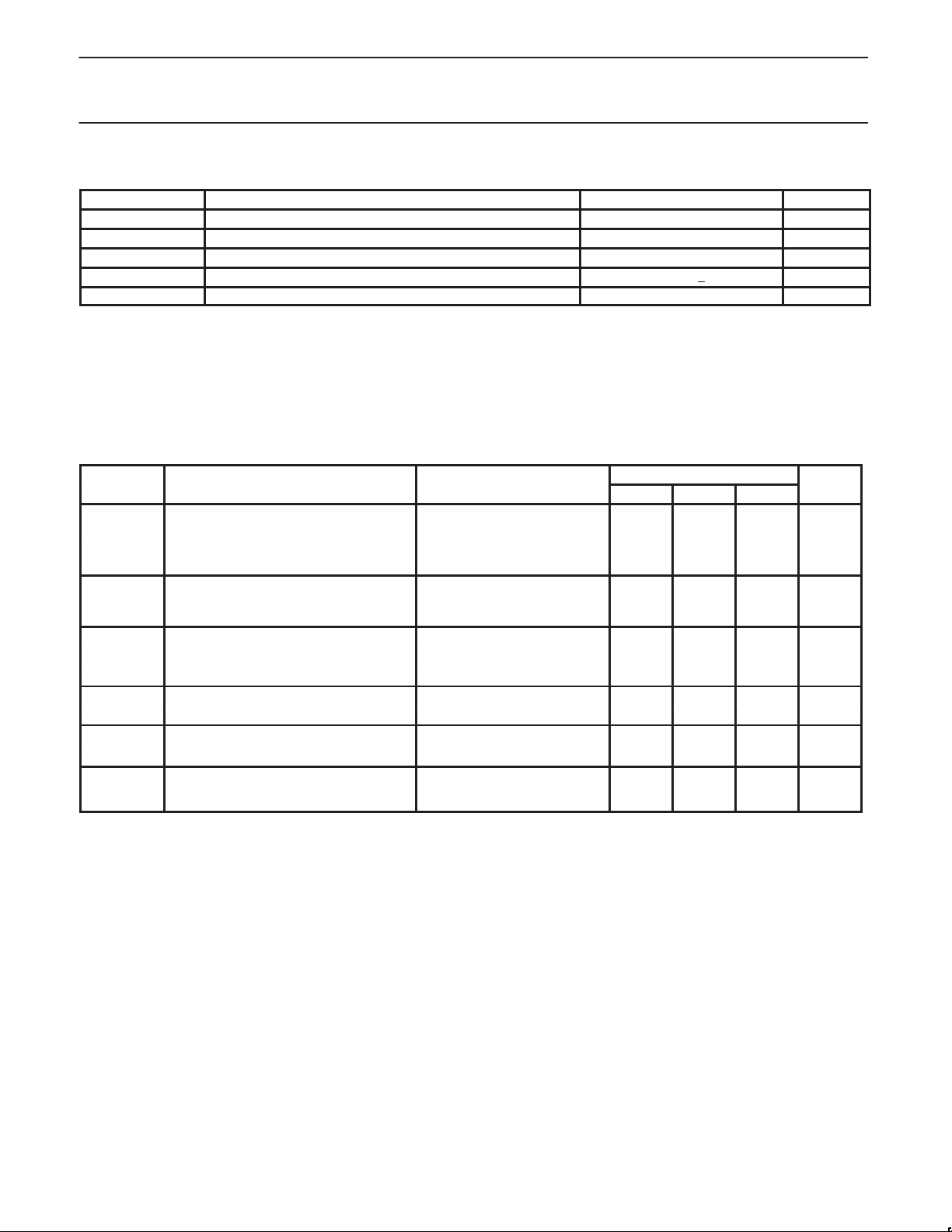
ORDERING INFORMATION
COMMERCIAL INDUSTRIAL
PACKAGES
VCC = +5V +10%,
TA = 0°C to +70°C
VCC = +5V +10%,
TA = –40°C to +85°C
24-Pin Plastic Dual In-Line Package (DIP) SCC2691AC1N24 SCC2691AE1N24 SOT222–1
28-Pin Plastic Leaded Chip Carrier (PLCC) Package SCC2691AC1A28 SCC2691AE1A28 SOT261-3
24-Pin Plastic Small Outline Large (SOL) Package SCC2691AC1D24 SOT137-1
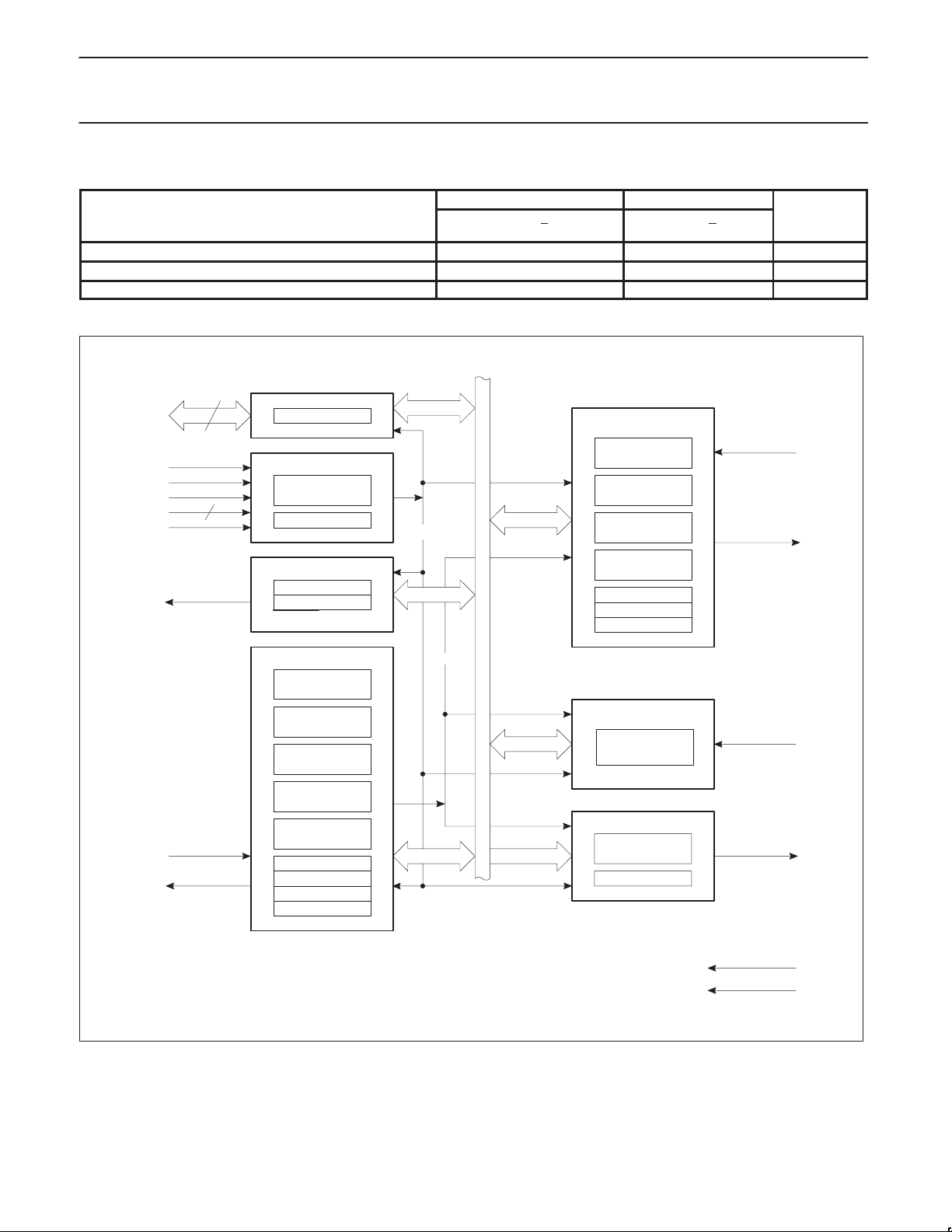
BLOCK DIAGRAM
INTERNAL DATA
BUS
8
D0–D7
RDN
WRN
CEN
A0–A2
RESET
INTRN
3
BUS BUFFER
OPERATION CONTROL
ADDRESS
DECODE
R/W CONTROL
INTERRUPT CONTROL
IMR
ISR
CONTROL
CHANNEL A
TRANSMIT
HOLDING REG
TRANSMIT
SHIFT REGISTER
RECEIVE
HOLDING REG (3)
RECEIVE
SHIFT REGISTER
MR1, 2
CR
SR
DWG #
TxD
RxD
X1/CLK
TIMING
BAUD RATE
GENERATOR
CLOCK
SELECTORS
COUNTER/
TIMER
CRYSTAL
OSCILLATOR
POWER DOWN
LOGIC
CSR
X2
ACR
CTUR
CTLR
TIMING
INPUT PIN
CHANGE OF
STATE
DETECTOR
OUTPUT PIN
FUNCTION
SELECT LOGIC
ACR
MPI
MPO
V
CC
GND
SD00123
Figure 2. Block Diagram
1998 Sep 04
3
Philips Semiconductors Product specification
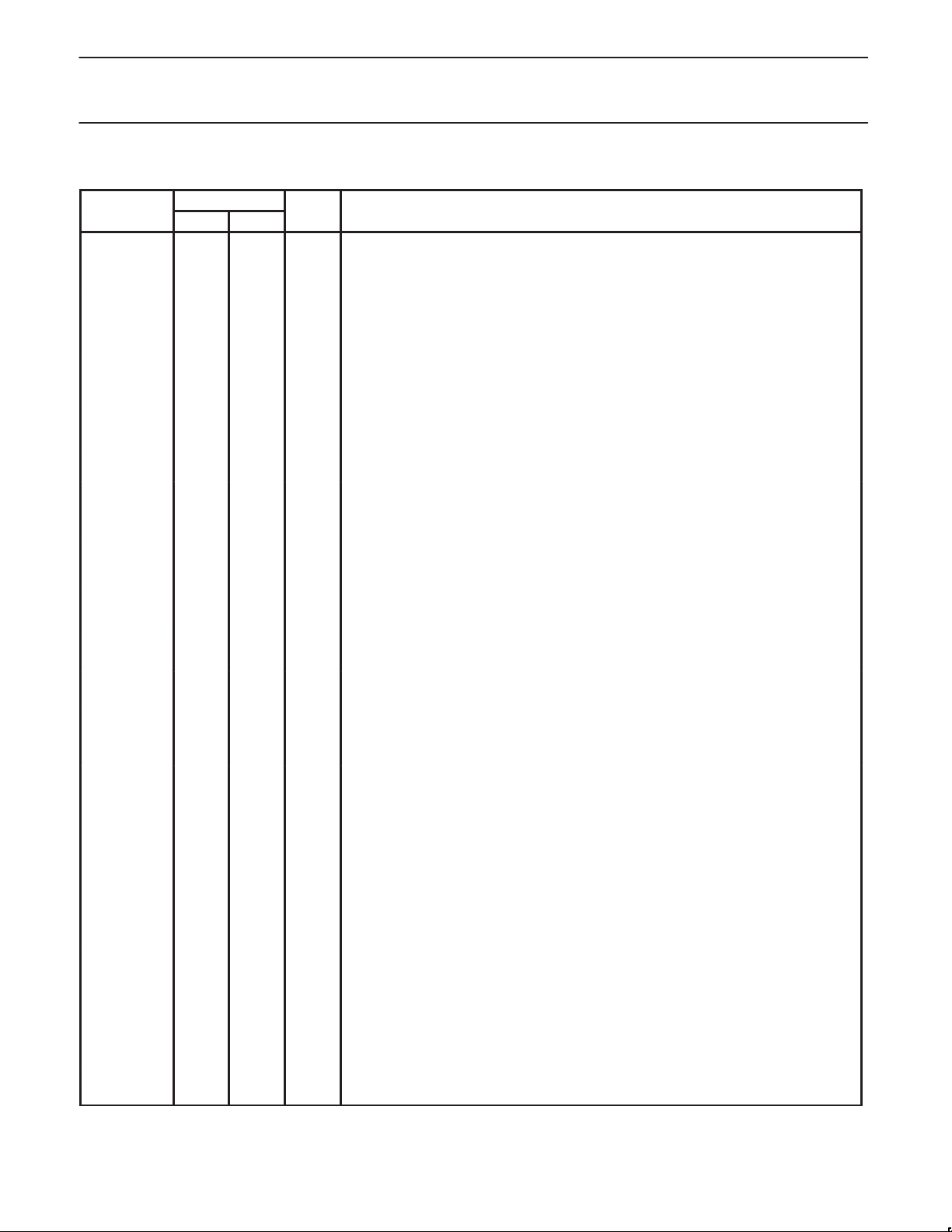
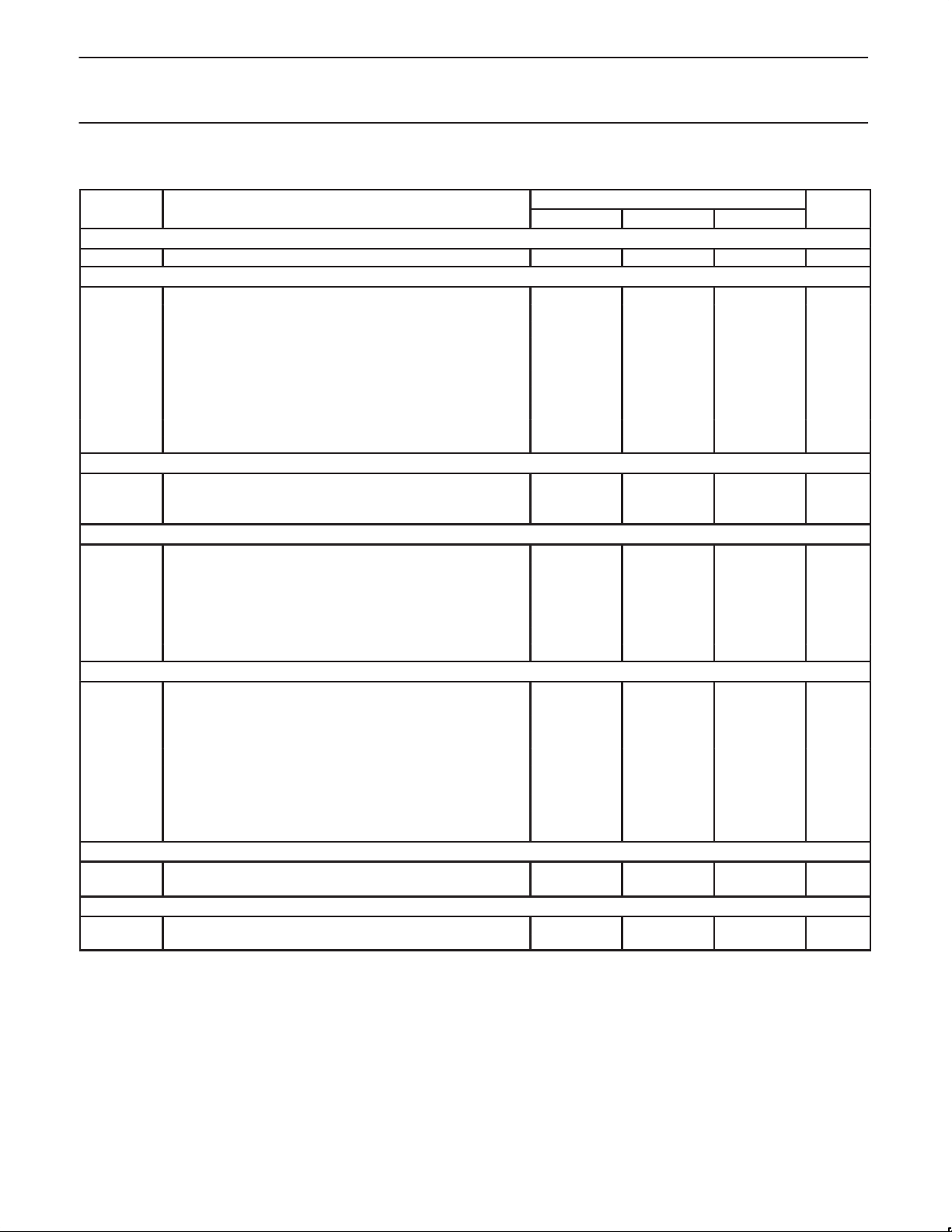
MNEMONIC
TYPE
NAME AND FUNCTION
SCC2691Universal asynchronous receiver/transmitter (UART)
PIN DESCRIPTION
PIN NO.
DIP PLCC
D0–D7 22–15 27, 25,
CEN 14 17 I Chip Enable: Active-low input. When low, data transfers between the CPU and the UART
WRN 23 28 I Write Strobe: Active-low input. A low on this pin while CEN is low causes the contents of
RDN 1 2 I Read Strobe: Active-low input. A low on this pin while CEN is low causes the contents of
A0–A2 8–6 11–9 I Address Inputs: Active-high address inputs to select the UART registers for read/write
RESET 11 14 I Reset: Master reset. A high on this pin clears the status register (SR), the interrupt mask
INTRN 13 16 O Interrupt Request: This active-low output is asserted upon occurrence of one or more of
X1/CLK 9 12 I Crystal 1: Crystal connection or an external clock input. A crystal of a clock the appropriate
X2 10 13 I Crystal 2: Crystal connection. See Figure 7. If a crystal is not used it is best to keep this pin
RxD 2 3 I Receiver Serial Data Input: The least significant bit is received first. If external receiver
TxD 3 4 O Transmitter Serial Data Output: The least significant bit is transmitted first. This output is
MPO 4 5 O Multi-Purpose Output: One of the following functions can be selected for this output pin by
MPI 5 6 I Multi-Purpose Input: This pin can serve as an input for one of the following functions:
V
CC
GND 12 15 I Ground
24 1 I Power Supply: +5V supply input.
24,
22–18
I Data Bus: Active-high 8-bit bidirectional 3-State data bus. Bit 0 is the LSB and bit 7 is the
MSB. All data, command, and status transfers between the CPU and the UART take place
over this bus. The direction of the transfer is controlled by the WRN and RDN inputs when
the CEN input is low. When the CEN input is high, the data bus is in the 3-State condition.
are enabled on D0–D7 as controlled by the WRN, RDN and A0–A2 inputs. When CEN is
high, the UART is effectively isolated from the data bus and D0–D7 are placed in the 3-State
condition.
the data bus to be transferred to the register selected by A0–A2. The transfer occurs on the
trailing (rising) edge of the signal.
the register selected by A0–A2 to be placed on the data bus. The read cycle begins on the
leading (falling) edge of RDN.
operations.
register (IMR), and the interrupt status register (ISR), sets the mode register pointer to MR1,
and places the receiver and transmitter in the inactive state causing the TxD output to go to
the marking (high) state. Clears Test modes.
seven maskable interrupting conditions. The CPU can read the interrupt status register to
determine the interrupting condition(s). This open-drain output requires a pull-up resistor.
frequency (nominally 3.6864 MHz) must be supplied at all times. For crystal connections see
Figure 7, Clock Timing.
not connected although it is permissible to ground it.
clock is specified, this input is sampled on the rising edge of the clock.
held in the marking (high) condition when the transmitter is idle or disabled and when the
UART is operating in local loopback mode. If external transmitter is specified, the data is
shifted on the falling edge of the transmitter clock.
programming the auxiliary control register:
RTSN – Request to send active-low output. This output is asserted and negated via the
command register. By appropriate programming of the mode registers, RTSN can be programmed to be automatically reset after the character in the transmitter is completely shifted
or when the receiver FIFO and shift register are full.
C/TO – The counter/timer output.
TxC1X – The 1X clock for the transmitter.
TxC16X – The 16X clock for the transmitter.
RxC1X – The 1X clock for the receiver.
RxC16X – The 16X clock for the receiver.
TxRDY – The transmitter holding register empty signal. Active-low output. (Open drain)
RxRDY/FFULL – The receiver FIFO not empty/full signal. Active-low output. (Open drain)
GPI – General purpose input. The current state of the pin can be determined by reading the
ISR.
CTSN – Clear-to-send active-low input.
CTCLK – Counter/timer external clock input.
RTCLK – Receiver and/or transmitter external clock input. This may be a 1X or 16X clock as
programmed by CSR[3:0] or CSR[7:4].
Pin has an internal V
pull-up device supplying 1 to 4 A of current.
CC
1998 Sep 04
4
Philips Semiconductors Product specification
SYMBOL
PARAMETER
TEST CONDITIONS
UNIT
SCC2691Universal asynchronous receiver/transmitter (UART)
CC
1
PARAMETER RATING UNIT
to GND
2
3
3
Note 4 °C
–0.5 to + 7.0 V
–0.5 to V
+10% V
CC
ABSOLUTE MAXIMUM RATINGS
SYMBOL
T
V
V
P
T
A
STG
CC
S
D
Operating ambient temperature range
Storage temperature range –65 to +150 °C
Voltage from V
Voltage from any pin to ground
Power Dissipation 300 mW
NOTES:
1. Stresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only and
functional operation of the device at these or any other condition above those indicated in the operation section of this specification is not
implied.
2. For operating at elevated temperature, the device must be derated based on +150°C maximum junction temperature.
3. This product includes circuitry specifically designed for the protection of its internal devices from damaging effects of excessive static
charge. Nonetheless, it is suggested that conventional precautions be taken to avoid applying any voltages larger than the rated maxima.
4. Parameters are valid over specified temperature range. See Ordering Information table for applicable operating temperature and V
range.
DC ELECTRICAL CHARACTERISTICS
1, 2, 3
CC
supply
LIMITS
Min Typ Max
V
V
V
V
I
IL
I
LL
I
OD
I
XIL
I
XIH
I
X2L
I
X2H
I
CCA
I
CCD
IL
IH
OL
OH
4
Input low voltage
Input high voltage
All except X1/CLK
X1/CLK
Output low voltage
Output high voltage
(except open drain outputs)
Input leakage current V
I
= 2.4mA
OL
IOH = –400µA
= 0 to V
IN
Data bus 3-State leakage current VO = 0.4 to V
Open-drain output leakage current VO = 0.4 to V
X1/CLK low input current V
X1/CLK high input current V
X2 low output current V
X2 high output current V
Power supply current, active
Power down current
5
= 0, X2 floated –100 –30 0 µA
IN
= VCC, X2 floated 0 30 100 µA
IN
= 0, X1/CLK = V
OUT
= VCC, X1/CLK = 0V 100 µA
OUT
0°C to +70°C
–40°C to +85°C
CC
CC
CC
CC
0.8 V
2
0.8V
CC
V
CC
0.4 V
2.4
–10 10 µA
–10 10 µA
–10 10
–100 µA
0.8
1.0
2.0
2.5
500
V
V
V
µA
mA
mA
µA
NOTES:
1. Parameters are valid over specified temperature range. See Ordering Information table for applicable operating temperature and V
range.
CC
supply
2. All voltage measurements are referenced to ground (GND). For testing, all input signals swing between 0V and 3.0V with a transition time of
20ns max. For X1/CLK, this swing is between 0.4V and 4.0V . All time measurements are referenced at input voltages of 0.8V and 2V and
output voltages of 0.8V and 2V as appropriate.
3. Typical values are at +25°C, typical supply voltages, and typical processing parameters.
4. Test condition for outputs: C
5. For power down current levels in the 1µA region see the UART application note.
= 150pF, except interrupt outputs. T est conditions for interrupt outputs: CL = 50pF, RL = 2.7kΩ to VCC.
L
1998 Sep 04
5
Philips Semiconductors Product specification
SYMBOL
PARAMETER
UNIT
SCC2691Universal asynchronous receiver/transmitter (UART)
AC ELECTRICAL CHARACTERISTICS
1, 2, 3, 4
LIMITS
Min Typ Max
Reset timing (Figure 3)
t
RES
Bus timing (Figure 4)
t
AS
t
AH
t
CS
t
CH
t
RW
t
DD
t
DF
t
DS
t
DH
t
RWD
MPI and MPO timing (Figure 5)
t
PS
t
PH
t
PD
Reset pulse width 100 ns
5
A0–A2 setup time to RDN, WRN low 10 ns
A0–A2 hold time from RDN, WRN low 100 ns
CEN setup time to RDN, WRN low 0 ns
CEN hold time from RDN, WRN high 0 ns
WRN, RDN pulse width 150 ns
Data valid after RDN low 125 ns
Data bus floating after RDN high 110 ns
Data setup time before WRN high 50 ns
Data hold time after WRN high 30 ns
Time between reads and/or writes
5
6, 7
150 ns
MPI input setup time before RDN low 30 ns
MI input hold time after RDN low 30 ns
MPO output valid after WRN high 370 ns
Interrupt timing (Figure 6)
t
IR
INTRN negated
Read RHR (RxRDY/FFULL interrupt) 370 ns
Write THR (TxRDY, TxEMT interrupt) 370 ns
Reset command (break change interrupt) 370 ns
Reset command (MPI change interrupt) 370 ns
Stop C/T command (counter interrupt) 370 ns
Write IMR (clear of interrupt mask bit) 270 ns
Clock timing (Figure 7)
t
CLK
f
CLK
t
CTC
f
CTC
t
RX
f
RX
t
TX
f
TX
9
8
8
8
X1/CLK high or low time 100 ns
X1/CLK frequency 0 4.0 MHz
Counter/timer clock high or low time 100 ns
Counter/timer clock frequency 0 4.0 MHz
RxC high or low time 220 ns
RxC frequency (16X)
RxC frequency (1X)
0
0
3.6864 2.0
1.0
MHz
MHz
TxC high or low time 220 ns
TxC frequency (16X)
TxC frequency (1X)
0
0
2.0
1.0
MHz
MHz
Transmitter timing (Figure 8)
t
TXD
t
TCS
TxD output delay from TxC external clock input on IP pin 350 ns
Output delay from TxC low at OP pin to TxD data output 0 150 ns
Receiver timing (Figure 9)
t
RXS
t
RXH
RxD data setup time before RxC high at external clock input on IP pin 100 ns
RxD data hold time after RxC high at external clock input on IP pin 100 ns
NOTES:
1. Parameters are valid over specified temp. range. See Ordering Information table for applicable operating temp. and V
2. All voltage measurements are referenced to ground (GND). For testing, all input signals swing between 0V and 3.0V with a transition time of
supply range.
CC
20ns max. For X1/CLK, this swing is between 0.4V and 4.0V . All time measurements are referenced at input voltages of 0.8V and 2V and
output voltages of 0.8V and 2V as appropriate.
3. Typical values are at +25°C, typical supply voltages, and typical processing parameters.
4. Test condition for outputs: C
5. Timing is illustrated and referenced to the WRN and RDN inputs. The device may also be operated with CEN as the ‘strobing’ input. In this
= 150pF, except interrupt outputs. T est conditions for interrupt outputs: CL = 50pF, RL = 2.7kΩ to VCC.
L
case, all timing specifications apply referenced to the falling and rising edges of CEN. CEN and RDN (also CEN and WRN) are ORed internally. As a consequence, this signal asserted last initiates the cycle and the signal negated first terminates the cycle.
6. If CEN is used as the ‘strobing’ input, this parameter defines the minimum high time between one CEN and the next. The RDN signal must
be negated for t
7. Consecutive write operations to the command register require at least three rising edges of the X1 clock between writes.
guarantee that any status register changes are valid.
RWD
8. These parameters are guaranteed by design, but are not 100% tested in production.
9. Operation to 0MHz is assured by design. Minimum test frequency is 2MHz.
1998 Sep 04
6
Philips Semiconductors Product specification
SCC2691Universal asynchronous receiver/transmitter (UART)
BLOCK DIAGRAM
As shown in the block diagram, the UART consists of: data bus buffer,
interrupt control, operation control, timing, receiver and transmitter.
Data Bus Buffer
The data bus buffer provides the interface between the external and
internal data busses. It is controlled by the operation control block to
allow read and write operations to take place between the controlling
CPU and UART.
Interrupt Control
A single interrupt output (INTRN) is provided which may be asserted
upon occurrence of any of the following internal events:
– Transmit holding register ready
– Transmit shift register empty
– Receive holding register ready or FIFO full
– Change in break received status
– Counter reached terminal count
– Change in MPI input
– Assertion of MPI input
Associated with the interrupt system are the interrupt mask register
(IMR) and the interrupt status register (ISR). The IMR can be
programmed to select only certain of the above conditions to cause
INTRN to be asserted. The ISR can be read by the CPU to
determine all currently active interrupting conditions. However, the
bits of the ISR are not masked by the IMR.
Operation Control
The operation control logic receives operation commands from the
CPU and generates appropriate signals to internal sections to
control device operation. It contains address decoding and read and
write circuits to permit communications with the microprocessor via
the data bus buffer. The functions performed by the CPU read and
write operations are shown in Table 1.
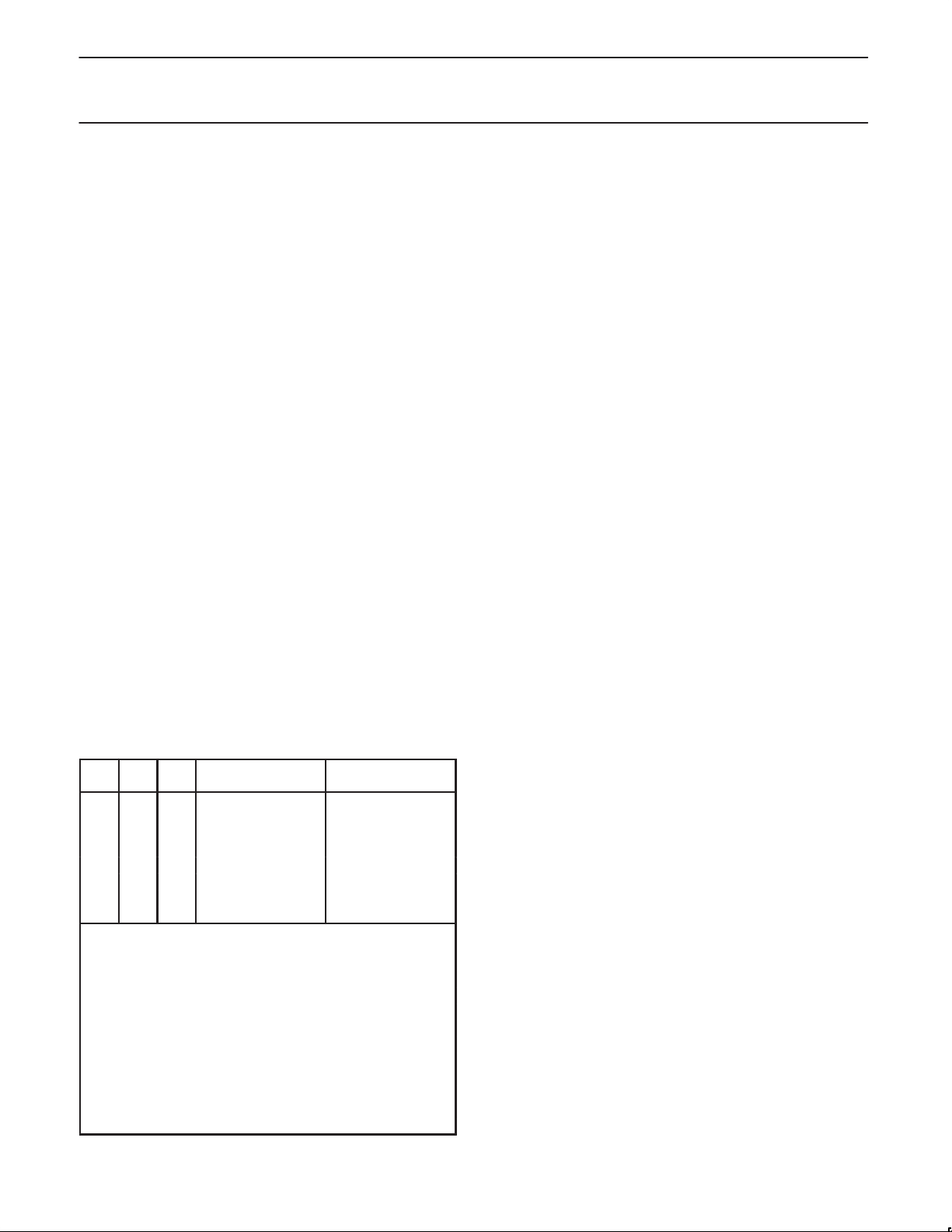
Table 1. Register Addressing
A2 A1 A0
0 0 0 MR1, MR2 MR1, MR2
0 0 1 SR CSR
0 1 0 BRG Test CR
0 1 1 RHR THR
1 0 0 1X/16X Test ACR
1 0 1 ISR IMR
1 1 0 CTU CTUR
1 1 1 CTL CTLR
NOTE;
*Reserved registers should never be read during operation since
they are reserved for internal diagnostics.
ACR = Auxiliary control register
CR = Command register
CSR = Clock select register
CTL = Counter/timer lower output register
CTLR = Counter/timer lower preset register
CTU = Counter/timer upper output register
CTUR = Counter/timer upper preset register
MR = Mode register A
SR = Status register
THR = Tx holding register
* See Table 6 for BRG Test frequencies in this data sheet, and
READ
(RDN = 0)
“Extended baud rates for SCN2681, SCN68681, SCC2691,
WRITE
(WRN = 0)
SCC2692, SCC68681 and SCC2698B”
for Data Communications, IC-19, 1994.
Mode registers 1 and 2 are accessed via an auxiliary pointer. The
pointer is set to MR1 by RESET or by issuing a reset pointer
command via the command register . Any read or write of the mode
register while the pointer is at MR1 switches the pointer to MR2. the
pointer then remains at MR2 so that subsequent accesses are to
MR2, unless the pointer is reset to MR1 as described above.
Philips Semiconductors ICs
Timing Circuits
The timing block consists of a crystal oscillator, a baud rate
generator, a programmable 16-bit counter/timer, and two clock
selectors.
The crystal oscillator operates directly from a 3.6864MHz crystal
connected across the X1/ CLK and X2 inputs with a minimum of
external components. If an external clock of the appropriate
frequency is available, it may be connected to X1/CLK. If an external
clock is used instead of a crystal, X1/CLK is driven using a
configuration similar to the one in Figure 7. In this case, the input
high-voltage must be capable of attaining the voltage specified in the
DC Electrical Characteristics. The clock serves as the basic timing
reference for the baud rate generator (BRG), the counter/timer, and
other internal circuits. A clock frequency, within the limits specified in
the electrical specifications, must be supplied if the internal BRG is
not used.
The baud rate generator operates from the oscillator or external
clock input and is capable of generating 18 commonly used data
communications baud rates ranging from 50 to 38.4K baud. Thirteen
of these are available simultaneously for use by the receiver and
transmitter. Eight are fixed, and one of two sets of five can be
selected by programming ACR[7]. The clock outputs from the BRG
are at 16X the actual baud rate. The counter/timer can be used as a
timer to produce a 16X clock for any other baud rate by counting
down the crystal clock or an external clock. The clock selectors
allow the independent selection by the receiver and transmitter of
any of these baud rates or an external timing signal.
Counter/Timer (C/T)
The C/T operation is programmed by ACR[6:4]. One of eight timing
sources can be used as the input to the C/T. The output of the C/T is
available to the clock selectors and can be programmed by
ACR[2:0} to be output on the MPO pin.
In the timer mode, the C/T generates a square wave whose period is
twice the number of clock periods loaded into the C/T upper and
lower registers. The counter ready bit in the ISR is set once each
cycle of the square wave. If the value in CTUR or CTLR is changed,
the current half-period will not be affected, but subsequent
half-periods will be affected. In this mode the C/T runs continuously
and does not recognize the stop counter command (the command
only resets the counter ready bit in the ISR). Receipt of a start C/T
command causes the counter to terminate the current timing cycle
and to begin a new cycle using the values in CTUR and CTLR.
In the counter mode, the C/T counts down the number of pulses
loaded into CTUR and CTLR. Counting begins upon receipt of a
start C/T command. Upon reaching terminal count, the counter
ready bit in the ISR is set. The counter continues counting past the
terminal count until stopped by the CPU. If MPO is programmed to
be the output of the C/T, the output remains high until terminal count
is reached, at which time it goes low. The output returns to the high
state and the counter ready bit is cleared when the counter is
stopped by a stop counter command. the CPU may change the
1998 Sep 04
7

Philips Semiconductors Product specification
SCC2691Universal asynchronous receiver/transmitter (UART)
values of CTUR and CTLR at any time, but the new count becomes
effective only on the next start counter command following a stop
counter command. If new values have not been loaded, the previous
count values are preserved and used for the next count cycle.
In the counter mode, the current value of the upper and lower eight
bits of the counter may be read by the CPU. It is recommended that
the counter be stopped when reading to prevent potential problems
which may occur if a carry from the lower eight bits to the upper
eight bits occurs between the times that both halves of the counter
are read. However, a subsequent start counter command causes
the counter to begin a new count cycle using the values in CTUR
and CTLR. See further description in CTUR/CTLR section.
Receiver and Transmitter
The UART is a full-duplex asynchronous receiver/transmitter. The
operating frequency for the receiver and transmitter can be selected
independently from the baud rate generator, the counter/timer, or
from an external input. Registers associated with the
communications channel are: the mode registers (MR1 and MR2),
the clock select register (CSR), the command register (CR), the
status register (SR), the transmit holding register (THR), and the
receive holding register (RHR).
Transmitter
The transmitter accepts parallel data from the CPU and converts it
to a serial bit stream on the TxD output pin. It automatically sends a
start bit followed by the programmed number of data bits, an
optional parity bit, and the programmed number of stop bits. The
least significant bit is sent first. Following the transmission of the
stop bits, if a new character is not available in the THR, the TxD
output remains high and the TxEMT bit in the SR will be set to 1.
Transmission resumes and the TxEMT bit is cleared when the CPU
loads a new character in the THR. In the 16X clock mode, this also
resynchronizes the internal 1X transmitter clock so that transmission
of the new character begins with minimum delay.
The transmitter can be forced to send a break (continuous low
condition) by issuing a start break command via the CR. The break
is terminated by a stop break command.
If the transmitter is disabled, it continues operating until the
character currently being transmitted and the character in the THR,
if any, are completely sent out. Characters cannot be loaded in the
THR while the transmitter is disabled.
Receiver
The receiver accepts serial data on the RxD pin, converts the serial
input to parallel format, checks for start bit, stop bit, parity bit (if any),
or break condition, and presents the assembled character to the
CPU. The receiver looks for a high-to-low (mark-to-space) transition
of the start bit on the RxD input pin. If a transition is detected, the
state of the RxD pin is sampled again each 16X clock for 7-1/2
clocks (16X clock mode) or at the next rising edge of the bit time
clock (1X clock mode). If RxD is sampled high, the start bit is invalid
and the search for a valid start bit begins again. If RxD is still low, a
valid start bit is assumed and the receiver continues to sample the
input at one bit time intervals at the theoretical center of the bit, until
the proper number of data bits and the parity bit (if any) have been
assembled, and one sop bit has been detected. The data is then
transferred to the RHR and the RxRDY bit in the SR is set to a 1. If
the character length is less than eight bits, the most significant
unused bits in the RHR are set to zero.
After the stop bit is detected, the receiver will immediately look for
the next start bit. However, if a non-zero character was received
without a stop bit (i.e. framing error) and RxD remains low for
one-half of the bit period after the stop bit was sampled, then the
receiver operates as if a new start bit transition had been detected at
that point(one-half bit time after the stop bit was sampled).
The parity error, framing error and overrun error (if any) are strobed
into the SR at the received character boundary, before the RxRDY
status bit is set.
If a break condition is detected (RxD is low for the entire character
including the stop bit), only one character consisting of all zeros will
be loaded in the FIFO and the received SR break bit is set to 1. The
RxD input must return to high for two (2) clock edges of the X1
crystal clock for the receiver to recognize the end of the break
condition and begin the search for a start bit. This will usually
require a high time of one X1 clock period or 3 X1 edges since
the clock of the controller is not synchronous to the X1 clock.
RECEIVER FIFO
The RHR consists of a first-in-first-out (FIFO) queue with a capacity
of three characters. Data is loaded from the receive shift register
into the top-most empty position of the FIFO. The RxRDY bit in the
status register (SR) is set whenever one or more characters are
available to be read, and a FFULL status bit is set if all three queue
positions are filled with data. Either of these bits can be selected to
cause an interrupt. A read of the RHR outputs the data at the top of
the FIFO. After the read cycle, the data FIFO and its associated
status bits are ‘popped’ thus emptying a FIFO position for new data.
Receiver Status Bits
In addition to the data word, three status bits (parity error, framing
error, and received break) are appended to each data character in
the FIFO. Status can be provided in two ways, as programmed by
the error mode control bit in mode register 1. In the character mode,
status is provided on a character-by-character basis: the status
applies only to the character at the top of the FIFO. In the block
mode, the status provided in the SR for these three bits is the
logical-OR of the status for all characters coming to the top of the
FIFO since the last reset error command was issued. In either
mode, reading the SR does not affect the FIFO. The FIFO is
‘popped’ only when the RHR is read. Therefore, the SR should be
read prior to reading the corresponding data character.
The receiver can control the deactivation of RTS. If programmed to
operate in this mode, the RTSN output will be negated when a valid
start bit was received and the FIFO is full. When a FIFO position
becomes available, the RTSN output will be re-asserted
automatically. This feature can be used to prevent an overrun, in
the receiver, by connecting the RTSN output to the CTSN input of
the transmitting device.
Receiver Reset and Disable
Receiver disable stops the receiver immediately – data being
assembled if the receiver shift register is lost. Data and status in the
FIFO is preserved and may be read. A re-enable of the receiver
after a disable will cause the receiver to begin assembling
characters at the next start bit detected. A receiver reset will discard
the present shift register data, reset the receiver ready bit (RxRDY),
clear the status of the byte at the top of the FIFO and re-align the
FIFO read/write pointers. This has the appearance of “clearing or
flushing” the receiver FIFO. In fact, the FIFO is NEVER cleared!
The data in the FIFO remains valid until overwritten by another
received character. Because of this, erroneous reading or extra
reads of the receiver FIFO will miss-align the FIFO pointers and
result in the reading of previously read data. A receiver reset will
re-align the pointers.
1998 Sep 04
8
 Loading...
Loading...