

Page 1
Semiconductors
5thedition
Product and design manual for RF Products
October 2004
Appendix RF Manual
Page 2

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
Koninklijke Philips Electronics N.V. 2004
All rights reserved. Reproduction in whole or in part is prohibited without the prior written consent of the copyright
owner. The information presented in this document does not form part of any quotation or contract, is believed to be
accurate and reliable and may be changed without notice. No liability will be accepted by the publisher for any
consequence of its use. Publication thereof does not convey nor imply any license under patent - or other industrial or
intellectual property rights.
Date of release: October 2004
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 2 of 35
Page 3

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
Content appendix:
Application notes:
Appendix A: BGA2715-17 general purpose
wideband amplifier,
50 Ohm Gain Blocks page: 4 - 8
Appendix B: BGA6x89 general purpose
medium power amplifier,
5th edition
50 Ohm Gain Blocks page: 9 -14
Appendix C: Introduction into the
GPS Front -End page: 15 -18
Reference work:
Appendix D: 2.4GHz Generic Front-End
reference design page: 19 - 25
Appendix E: RF Application-basics page: 26 - 29
Appendix F: RF Design-basics page: 30 - 34
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 3 of 35
Page 4
Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
Appendix A: BGA2715-17 general purpose
wideband amplifiers, 50 Ohm Gain Blocks
APPLICATION INFORMATION BGA2715-17
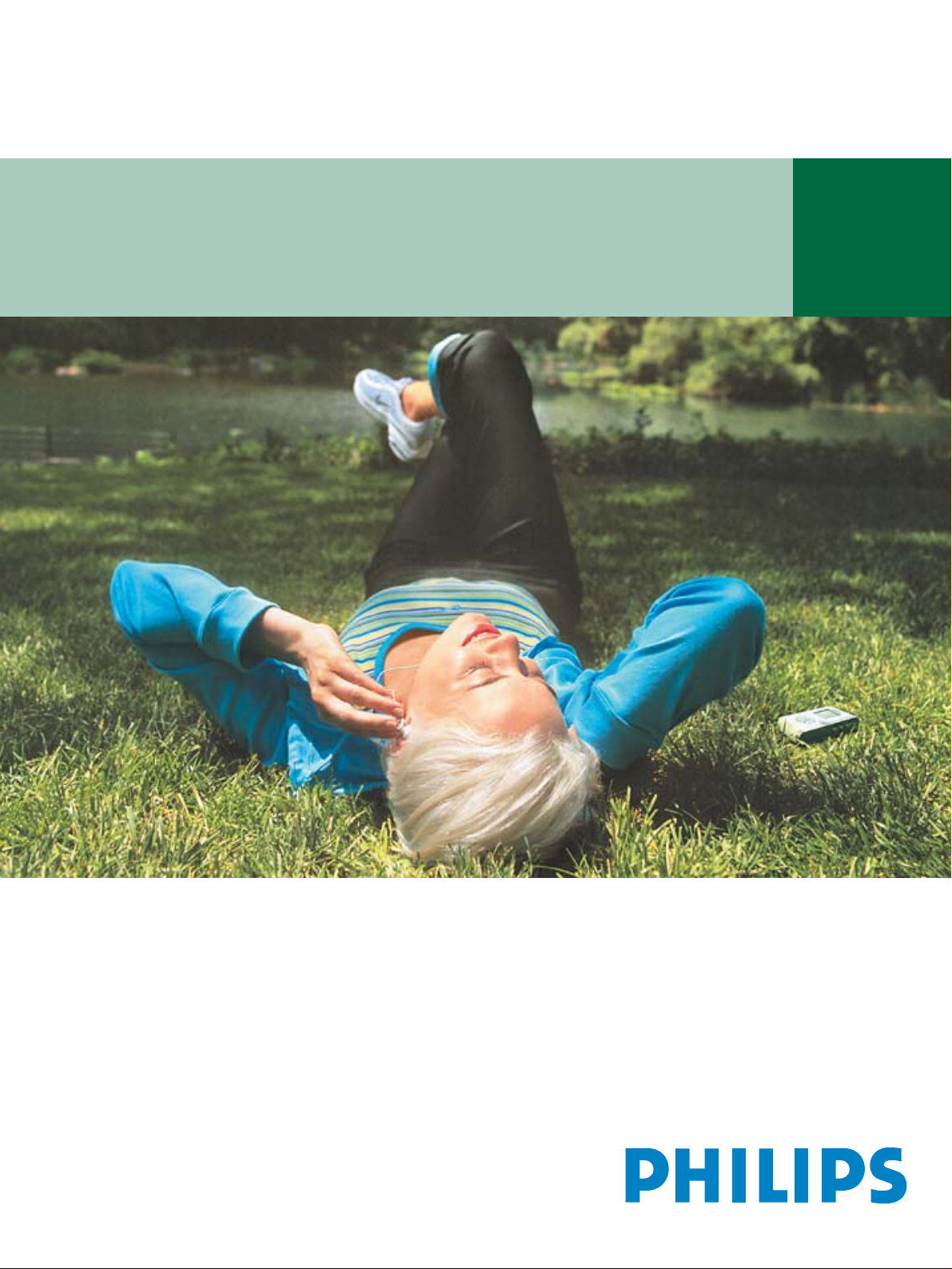
Figure 2 shows a typical application circuit for the BGA2715-17 MM IC.
The device is internally matched to 50 O, and therefore does not need any external
matching. The value of the input and output DC blocking capacitors C2 and C3 should
not be more than 100 pF for applications above 100 MHz. However, when the device is
operated below 100 MHz, the capacitor value should be increased.
The 22 nF supply decoupling capacitor C1 should be located as close as possible to
the MMIC.
The PCB top ground plane, connected to the pins 2, 4 and 5 must be as close as
possible to the MMIC, preferably also below the MMIC. When using via holes, use
multiple via holes, as close as possible to the MMIC.
Application examples
Vs
C1
Vs
RF in
RF input
RF out
RF output
C2 C3
GND1
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 4 of 35
GND2
Page 5
Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
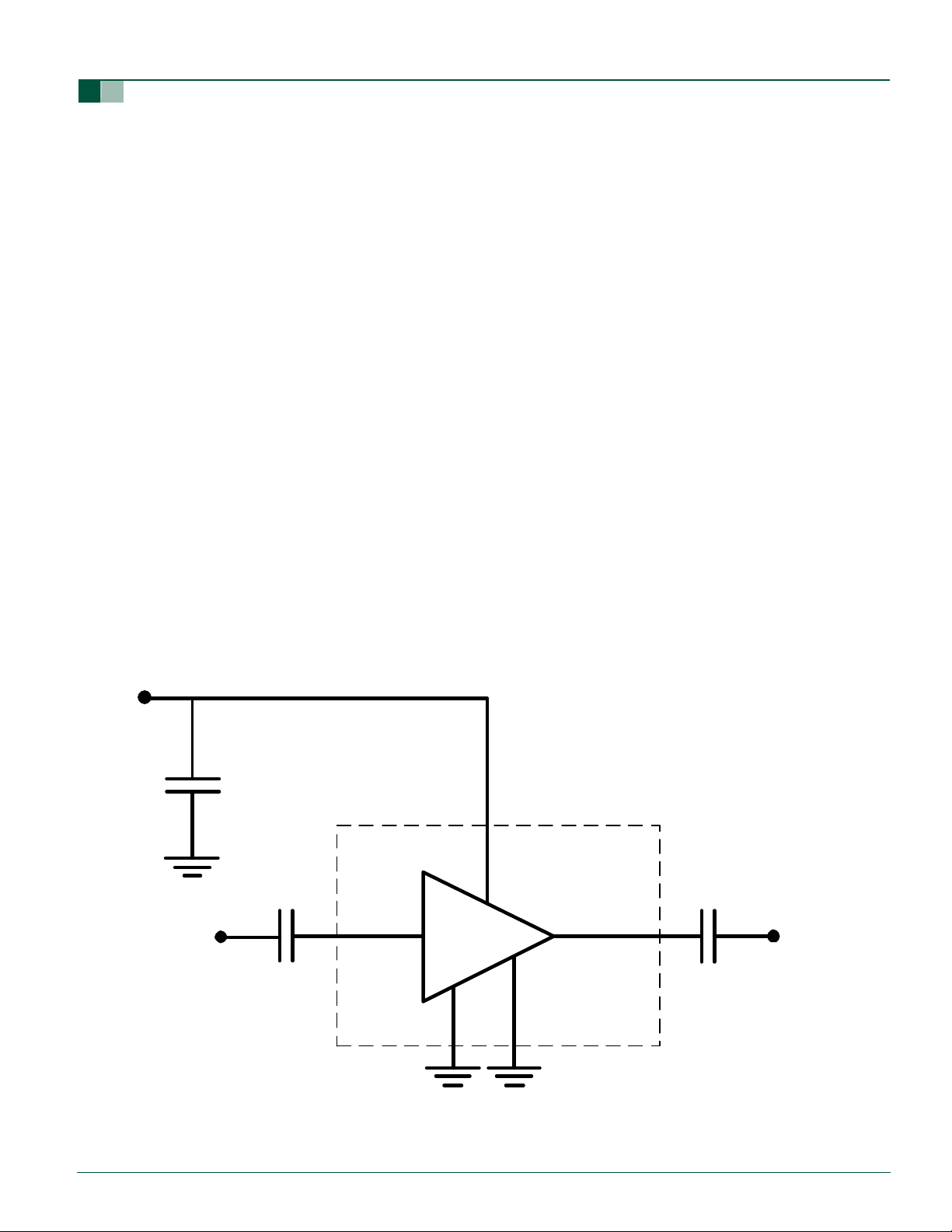
Mixer
from RF circuit
or demodulator
wideband
amplifier
Oscillator
The MMIC is very suitable as IF amplifier in e.g. LNB's. The exellent wideband
characteristics make it an easy building block.
Mixer
to IF circuit
antenna
LNA
wideband
to IF circuit
or demodulator
amplifier
Oscillator
As second amplifier after an LNA, the MMIC offers an easy matching, low noise
solution.
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 5 of 35
Page 6
Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
2
DESCRIPTION
PARAMETER
5th edition
MMIC wideband amplifier
FEATURES
FEATURES
PIN
• Internally matched to 50 Ohms
• Wide frequency range, 3 dB bandwidth = 3.3 GHz
• Flat 22 dB gain, ± 1 dB up to 2.8 GHz
• -8 dBm output power at 1 dB compression point
• Good linearity for low current, OIP3 = 2 dBm
• Low second harmonic, -30 dBc at P
= - 40 dBm
Drive
• Unconditionally stable, K
APPLICATIONS
• LNB IF amplifiers
• Cable systems
• ISM
• General purpose
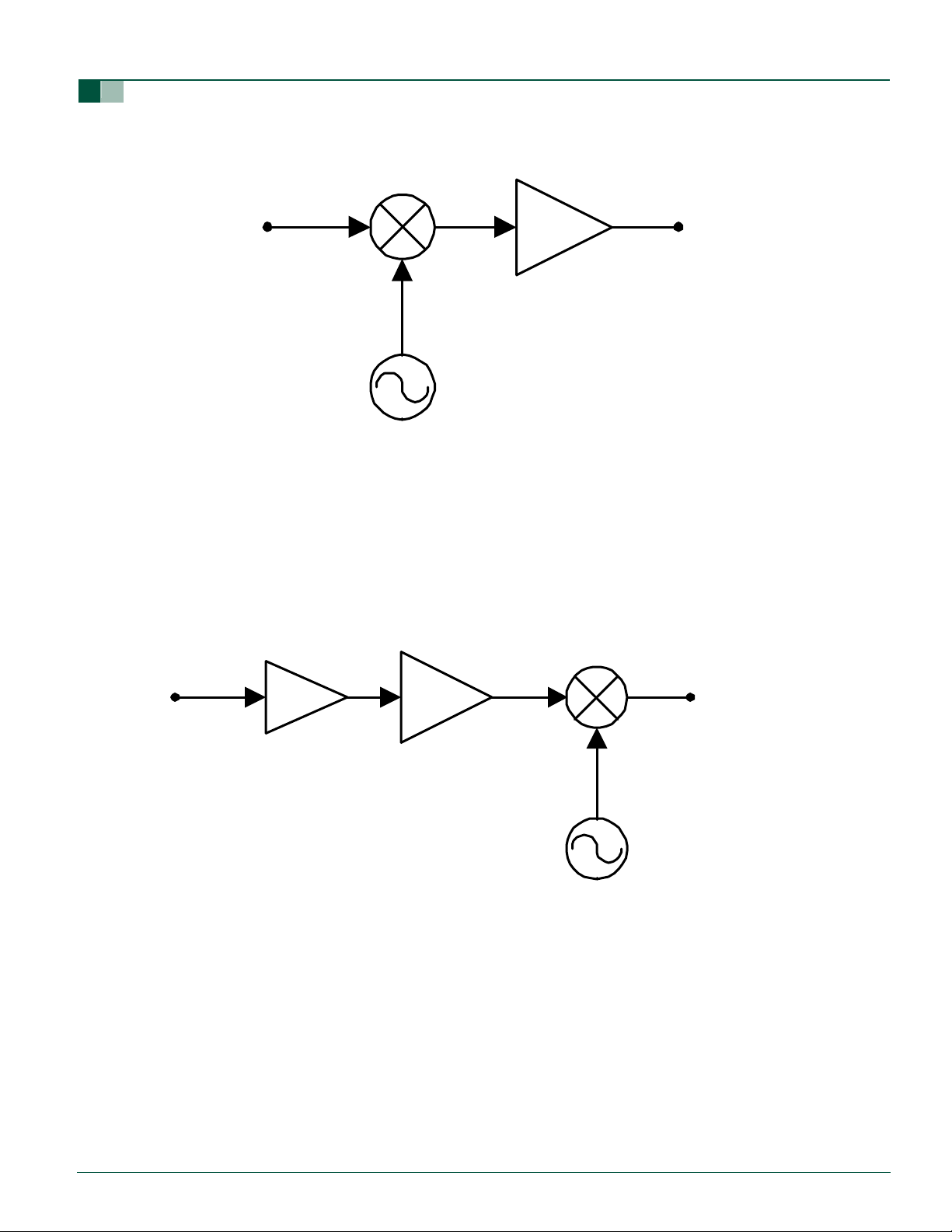
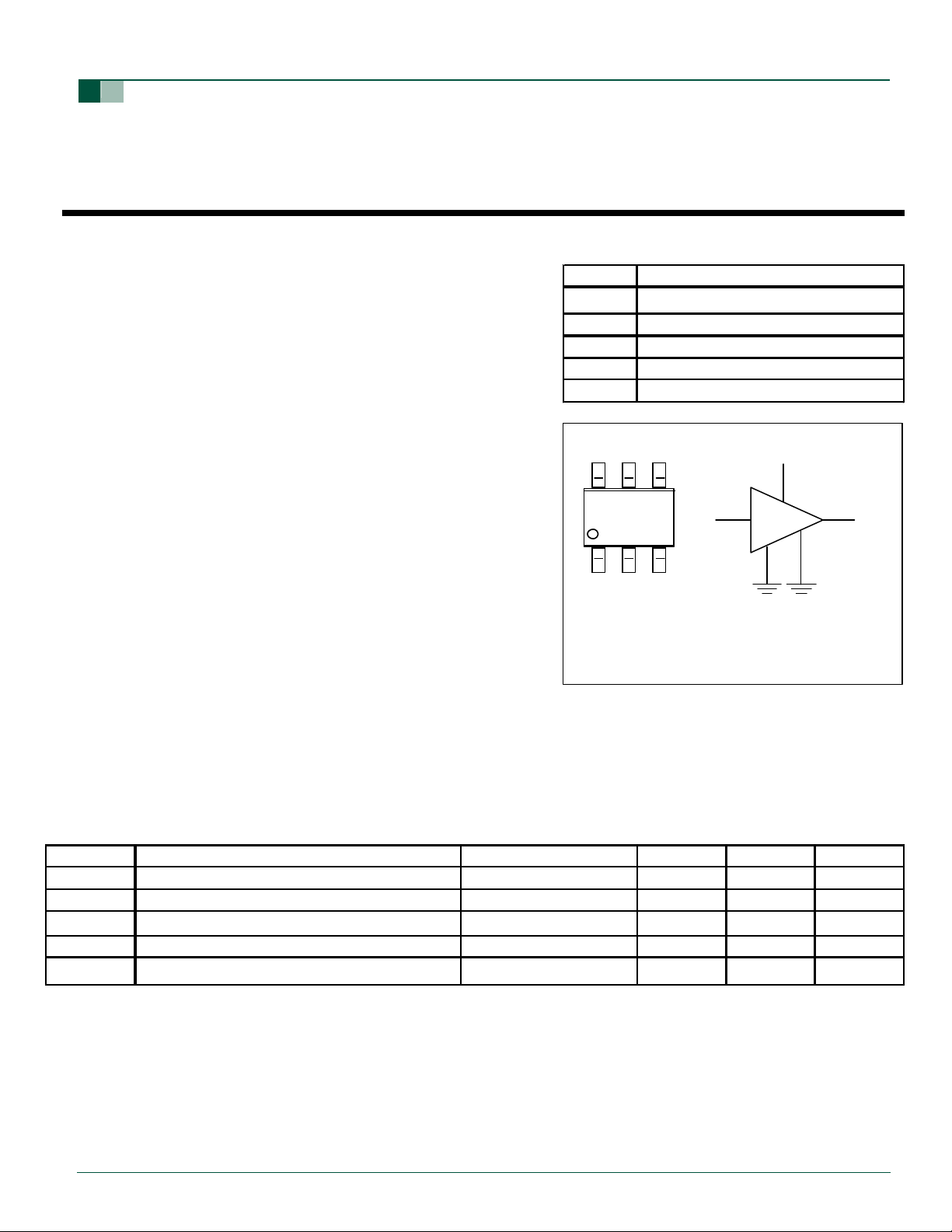
DESCRIPTION
Silicon Monolitic Microwave Integrated Circuit (MMIC)
wideband amplifier with internal matching circuit in a
6-pin SOT363 plastic SMD package.
PINNING
1
2,5 GND 2
3 RF out
4 GND 1
6 RF in
6 5 4
6 5 4
1 2 3
1 2 3
Top view
Marking code: B6-
Fig.1 Simplified outline (SOT363) and symbol.
V
BGA2715
S
1
6
4
2,5
3
QUICK REFERENCE DATA
SYMBOL CONDITIONS TYP. MAX. UNIT
Vs 5 6 V
Is 4.3 - mA
|S21|
NF f = 1 GHz 2.6 - dB
P
L sat
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 6 of 35
DC supply voltage
DC supply current
insertion power gain
noise figure
saturated load power
f = 1 GHz 22 - dB
f = 1 GHz -4 - dBm
Page 7
Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
2
DESCRIPTION
noise figure
PARAMETER
5th edition
MMIC wideband amplifier
FEATURES PINNING
FEATURES
PIN
• Internally matched to 50 Ohms
• Wide frequency range, 3 dB bandwidth = 3.2 GHz
• Flat 23 dB gain, ± 1 dB up to 2.7 GHz
• 9 dBm output power at 1 dB compression point
• Good linearity for low current, OIP3 = 22 dBm
• Low second harmonic, -38 dBc at P
= - 5 dBm
Load
• Unconditionally stable, K > 1.2
APPLICATIONS
• LNB IF amplifiers
• Cable systems
• ISM
• General purpose
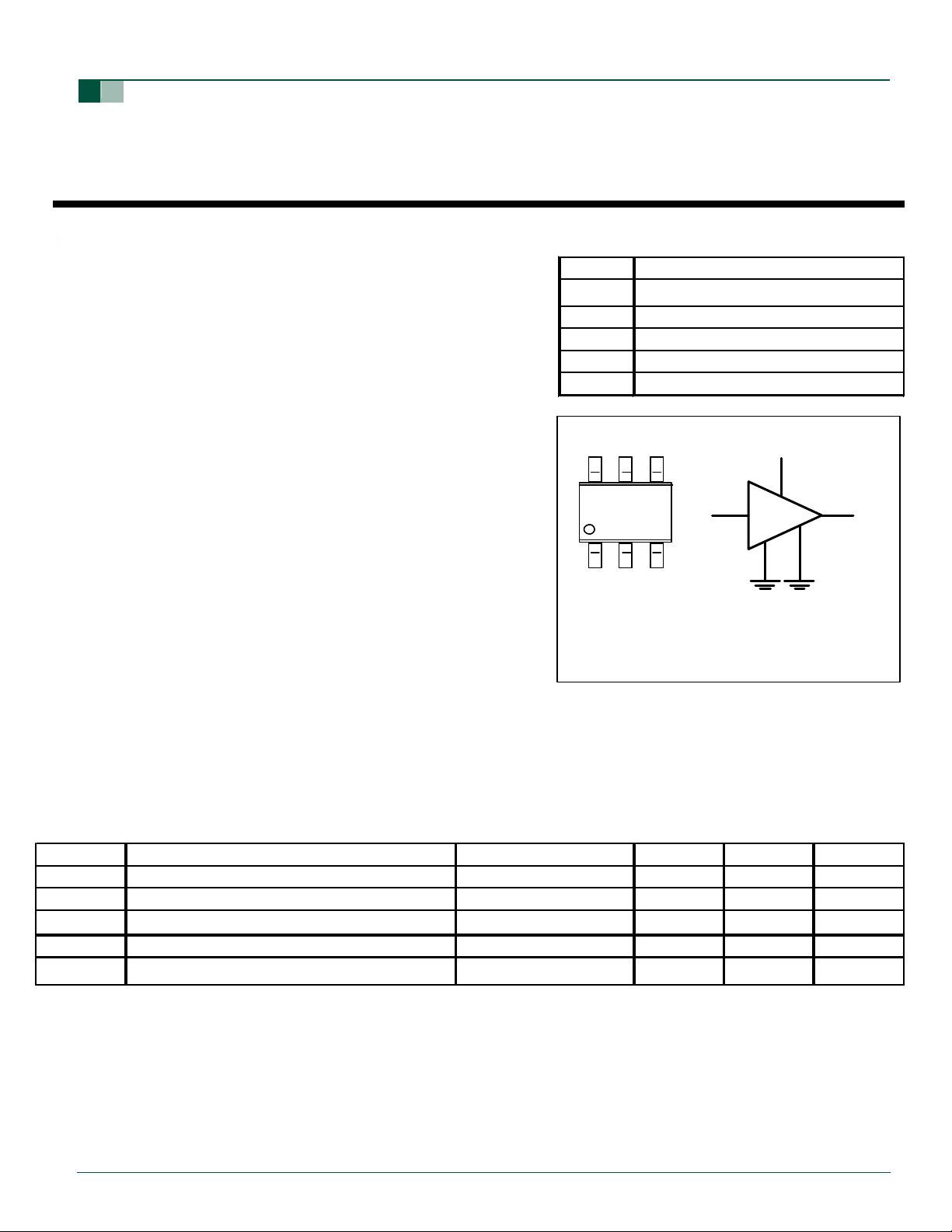
DESCRIPTION
Silicon Monolitic Microwave Integrated Circuit (MMIC)
wideband amplifier with internal matching circuit in a
6-pin SOT363 plastic SMD package.
1
2,5 GND 2
3 RF out
4 GND 1
6 RF in
6 5 4
6 5 4
1 2 3
1 2 3
Top view
Marking code: B7-
Fig.1 Simplified outline (SOT363) and symbol.
V
BGA2716
S
1
6
4
2,5
3
QUICK REFERENCE DATA
SYMBOL CONDITIONS TYP. MAX. UNIT
Vs 5 6 V
Is 15.9 - mA
|S21|
NF f = 1 GHz 5.3 - dB
P
L sat
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 7 of 35
DC supply voltage
DC supply current
insertion power gain
saturated load power
f = 1 GHz 22.9 - dB
f = 1 GHz 11.6 - dBm
Page 8
Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
2
DESCRIPTION
PARAMETER
5th edition
MMIC wideband amplifier BGA2717
FEATURES PINNING
FEATURES
PIN
• Internally matched to 50 Ohms
V
• Wide frequency range, 3 dB bandwidth = 3.2 GHz
• Flat 24 dB gain, ± 1 dB up to 2.8 GHz
• -2.5 dBm output power at 1 dB compression point
• Good linearity for low current, OIP3 = 10 dBm
• Low second harmonic, -38 dBc at P
= - 40 dBm
Drive
• Low noise figure, 2.3 dB at 1 GHz.
• Unconditionally stable, K > 1.5
APPLICATIONS
• LNB IF amplifiers
• Cable systems
• ISM
• General purpose
1
S
2,5 GND 2
3 RF out
4 GND 1
6 RF in
6 5 4
6 5 4
1 2 3
1 2 3
Top view
1
6
4
2,5
3
DESCRIPTION
Marking code: 1B-
Silicon Monolitic Microwave Integrated Circuit (MMIC)
Fig.1 Simplified outline (SOT363) and symbol.
wideband amplifier with internal matching circuit in a
6-pin SOT363 plastic SMD package.
QUICK REFERENCE DATA
SYMBOL CONDITIONS TYP. MAX. UNIT
Vs 5 6 V
Is 8.0 - mA
|S21|
NF f = 1 GHz 2.3 - dB
P
L sat
DC supply voltage
DC supply current
insertion power gain
noise figure
saturated load power
f = 1 GHz 24 - dB
f = 1 GHz 1 - dBm
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 8 of 35
Page 9
Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
microstrip
microstrip
5th edition
Appendix B: BGA6x89 general purpose
medium power ampl., 50 Ohm Gain Blocks
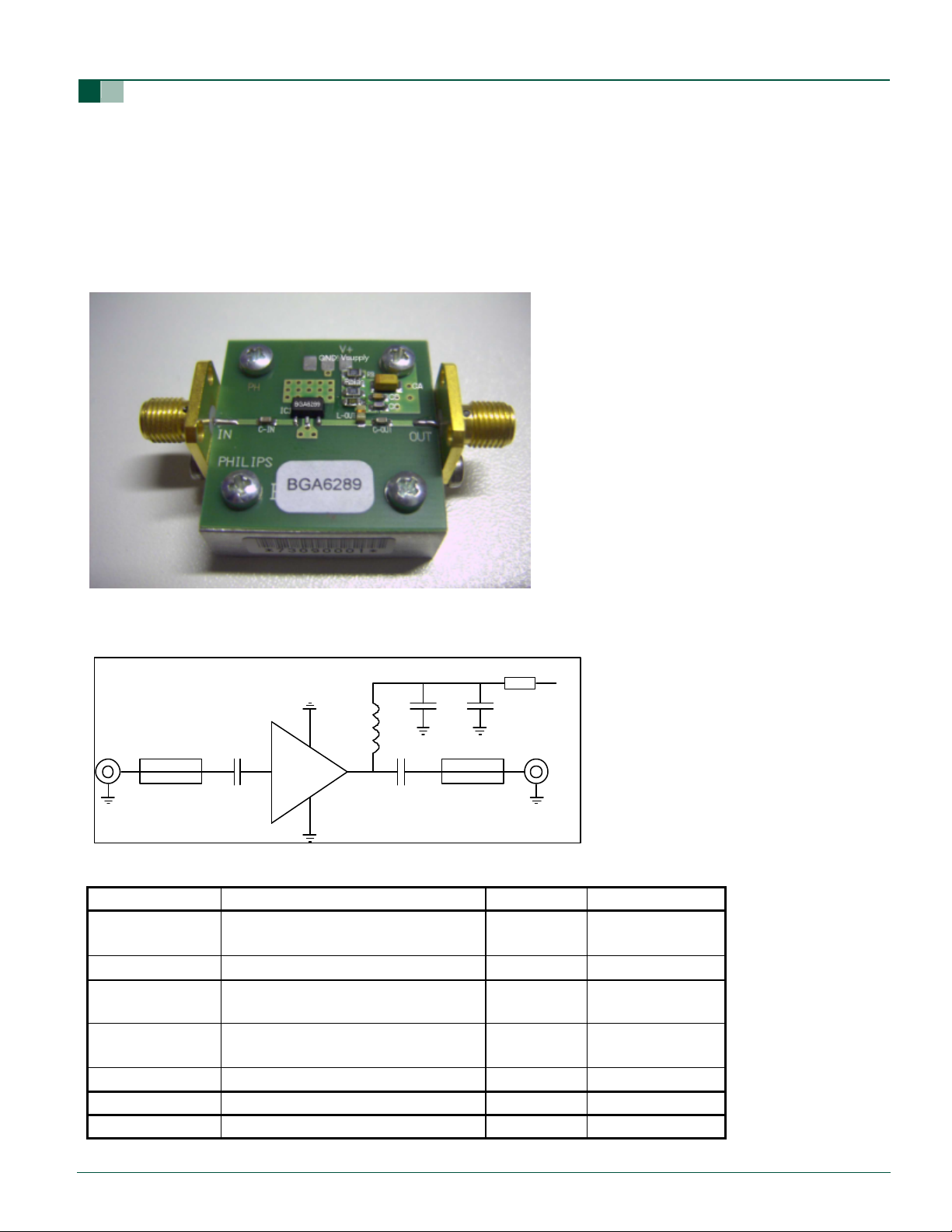
Application note for the BGA6289
Application note for the BGA6289.
(See also the objective datasheet BGA6289)
50 Ohm
2
CB CB
2
LC
D
V
13
Rbias
CA CD
50 Ohm
VS
Figure 1 Application circuit.
COMPONENT
Cin C
multilayer ceramic chip
out
DESCRIPTION VALUE DIMENSIONS
68 pF 0603
capacitor
CA Capacitor 1 µF 0603
CB multilayer ceramic chip
1 nF 0603
capacitor
CC multilayer ceramic chip
22 pF 0603
capacitor
L
SMD inductor 22 nH 0603
out
Vsupply Supply voltage 6 V
R
=RB SMD resistor 0.5W 27 Ohm ----
bias
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 9 of 35
Page 10
Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
S22 [dB]
5th edition
Table 1 component values placed on the demo board.
CA is needed for optimal supply decoupling .
Depending on frequency of operation the values of Cin C
and L
out
can be changed
out
(see table 2).
COMPONENT
Frequency (MHz)
500 800 1950 2400 3500
Cin C
220 pF 100 pF 68 pF 56 pF 39 pF
out
CA 1 µF 1 µF 1 µF 1 µF 1 µF
CB 1 nF 1 nF 1 nF 1 nF 1 nF
CC 100 pF 68 pF 22 pF 22 pF 15 pF
L
68 nH 33 nH 22 nH 18 nH 15 nH
out
Table 2 component selection for different frequencies.
V
depends on R
supply
used. Device voltage must be approximately 4 V (i.e. device
bias
current = 80mA).
With formula 1 it is possible to operate the device under different supply voltages.
If the temperature raises the device will draw more current, the voltage drop over Rbias
will increase and the device voltage decrease, this mechanism provides DC stability.
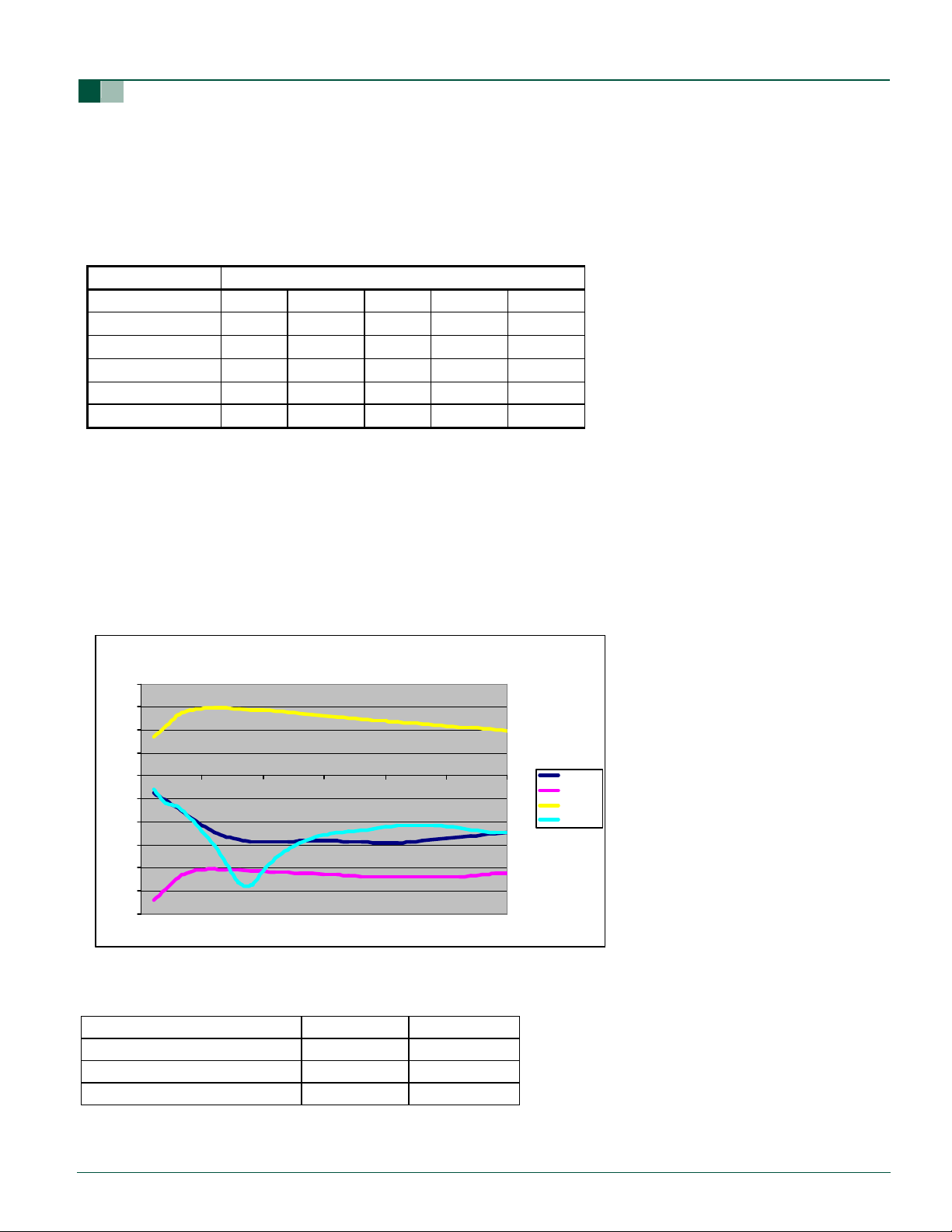
Measured small signal performance.
Small signal performance BGA6289
20.00
15.00
10.00
5.00
0.00
0.00 500.00 1000.00 1500.00 2000.00 2500.00 3000.00
-5.00
-10.00
-15.00
-20.00
-25.00
-30.00
f [MHz]
Figure 2 Small signal performance.
Measured large signal performance.
f 850 MHz 2500 MHz
IP3
31 dBm 25 dBm
out
PL
18 dBm 16 dBm
1dB
NF 3.8 4.1
Table 3 Large signal performance and noise figure.
S11 [dB]
S12 [dB]
S21 [dB]
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 10 of 35
Page 11
Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
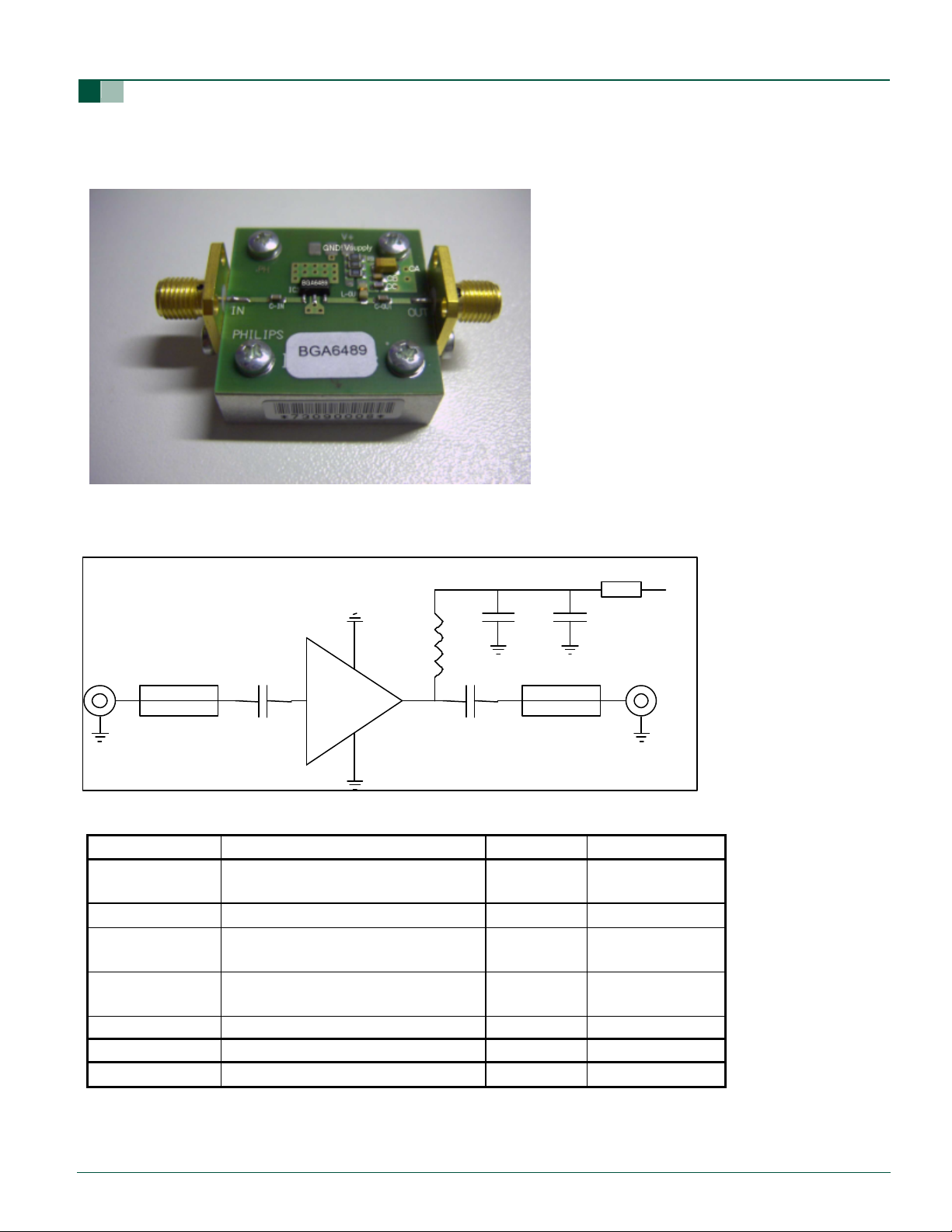
Application note for the BGA6489
Application note for the BGA6489.
(See also the objective datasheet BGA6489)
5th edition
50 Ohm
2
CB CB
2
LC
VD
13
Rbias
CA CD
50 Ohm
S
V
Figure 1 Application circuit.
COMPONENT
Cin C
multilayer ceramic chip
out
DESCRIPTION VALUE DIMENSIONS
68 pF 0603
capacitor
CA Capacitor 1 µF 0603
CB multilayer ceramic chip
1 nF 0603
capacitor
CC multilayer ceramic chip
22 pF 0603
capacitor
L
SMD inductor 22 nH 0603
out
Vsupply Supply voltage 8 V
R
=RB SMD resistor 0.5W 33 Ohm ----
bias
Table 1 component values placed on the demo board.
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 11 of 35
Page 12

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
S22
5th edition
CA is needed for optimal supply decoupling .
Depending on frequency of operation the values of Cin C
and L
out
can be changed
out
(see table 2).
COMPONENT
Frequency (MHz)
500 800 1950 2400 3500
Cin C
220 pF 100 pF 68 pF 56 pF 39 pF
out
CA 1 µF 1 µF 1 µF 1 µF 1 µF
CB 1 nF 1 nF 1 nF 1 nF 1 nF
CC 100 pF 68 pF 22 pF 22 pF 15 pF
L
68 nH 33 nH 22 nH 18 nH 15 nH
out
Table 2 component selection for different frequencies.
V
depends on R
supply
used. Device voltage must be approximately 5.1 V (i.e. device
bias
current = 80mA).
With formula 1 it is possible to operat e the device under different supply voltages.
If the temperature raises the device will draw more current, the voltage drop over Rbias
will increase and the device voltage decrease, this mechanism provides DC stability.
Measured small signal performance.
Figure 2 Small signal performance.
Small signal performance BGA6489
30.00
20.00
10.00
0.00
0.00 500.00 1000.00 1500.00 2000.00 2500.00 3000.00
-10.00
-20.00
-30.00
-40.00
f [MHz]
S11
S12
S21
Measured large signal performance.
f 850 MHz 2500 MHz
IP3
33 dBm 27 dBm
out
PL
20 dBm 17 dBm
1dB
NF 3.1 dB 3.4 dB
Table 3 Large signal performance and noise figure.
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 12 of 35
Page 13

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
Application note for the BGA6589
The Demo Board with medium power wide-band gainblock BGA6589.
(See also the objective datasheet BGA6589)
Rbias
CA CD
50 Ohm
2
CB CB
2
LC
D
V
13
50 Ohm
Application circuit.
COMPONEN
DESCRIPTION VALUE DIMENSIONS
T
Cin C
multilayer ceramic chip
out
68 pF 0603
capacitor
CA Capacitor 1 µF
CB multilayer ceramic chip
1 nF 0603
capacitor
CC multilayer ceramic chip
22 pF 0603
capacitor
LC SMD inductor 22 nH 0603
Vsupply Supply voltage 7.5 V
R
=RB SMD resistor 0.5W 33 Ohm ----
bias
Table 1 component values placed on the demo board.
S
V
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 13 of 35
Page 14

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
CA is needed for optimal supply decoupling .
Depending on frequency of operation the values of Cin C
and L
out
can be changed
out
(see table 2).
COMPONENT
Frequency (MHz)
500 800 1950 2400 3500
Cin C
220 pF 100 pF 68 pF 56 pF 39 pF
out
CA 1 µF 1 µF 1 µF 1 µF 1 µF
CB 1 nF 1 nF 1 nF 1 nF 1 nF
CC 100 pF 68 pF 22 pF 22 pF 15 pF
L
68 nH 33 nH 22 nH 18 nH 15 nH
out
Table 2 component selection for different frequencies.
V
depends on R
supply
used. Device voltage must be approximately 4.8 V (i.e. device
bias
current = 83mA).
With form ula 1 it is possible to operate the device under different supply voltages.
If the temperature raises the device will draw more current, the voltage drop over Rbias
will increase and the device voltage decrease, this mechanism provides DC stability.
Measured small signal performance.
Small signal performance BGA6589
30.00
20.00
10.00
0.00
0.00 500.00 1000.00 1500.00 2000.00 2500.00 3000.00
-10.00
-20.00
-30.00
-40.00
-50.00
f [MHz]
S11
S12
S21
S22
Figure 2 Small signal performance.
Measured large signal performance.
f 850 MHz 2500 MHz
IP3
33 dBm 32 dBm
out
PL
21 dBm 19 dBm
1dB
NF 3.1 dB 3.4 dB
Table 3 Large signal performance and noise figure.
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 14 of 35
Page 15

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
This satellite identifier C/A code is
P
seudo
lite
with enough power to ensure a minimum signal
5th edition
Appendix C: Introduction GPS Front-End
Due to shrinking of the mechanical dimensions and attractive pricing of the
semiconductors, GPS applications got very popular in the last years. A GPS navigation
system is based on measuring and evaluating RF signals transmitted by the GPS
satellites. There are at least 24 active satellites necessary in a distance of 20200km
above the Earth surface. All sat’s transmits their civil useable L1 signal at the same
time down to the user on 1575.42MHz in the so-called microwave L-band. Each
satellite have it’s own C/A code (Coarse Acquisition).
The GPS Satellites are 20020km far from the Earth surface
The L1 carrier based GPS system does use : CDMA - DSSS - BPSK modulation
Available GPS carrier frequencies
L1 Link 1 carrier frequency 1575.42 MHz
L2 Link 2 carrier frequency 1227.6 MHz
L3 Link 3 carrier frequency 1381.05 MHz
L4 Link 4 carrier frequency 1379.913 MHz
L5 Link 5 carrier frequency 1176.45 MHz
The U.S. navigation system GPS was originally started by the U.S. military in 1979. It will be updated in
order to supply the carriers L2 & L5 for increasing civil performances together with the standard L1 RF
carrier. GPS uses BPSK modulation on the L1 carrier and, beginning with launch of the modernized
Block IIR the L2 carrier. The L5 signal that will appear with the Block IIF satellites in 2006 will have use of
the QPSK modulation (Quadrature Phase Shift Keying).
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 15 of 35
Randomly and appears like Noise in the
frequency spectrum (= PRN C/A code). The L1
carrier is BPSK (Binary Phase Shift Keying)
modulated by the C/A data code, by the
navigation data message and the encrypted
P(Y)-code. Due to C/A’s PRN modulation, the
carrier is DSSS modulated (Direct Sequence
Spread Spectrum modulation). This DSSS
spreads the former bandwidth signal to a satel
internal limited width of 30MHz. A GPS receiver
must know the C/A code of each satellite for
selecting it out of the antennas kept RF
spectrum. Because a satellite is selected out of
the data stream by the use of an identification
code, GPS is a CDMA-System (Code Division
Multiplex Access). This RF signal is transmitted
Page 16

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
The spread spectrum modulated signals
(
)
The performances overview of the actual and the next up-coming GPS system:
Need of a
Topic Used Codes
Today basic
positioning
Tomorrow basic
positioning
Today advance
positioning
Tomorrow
advanced
positioning
In 2004 will be start the European navigation system EGNOS. News forecasted the European system
Galileo for 2008. GLONA SS is a Russian Navigation System.
All GPS satellites use the same L1 frequency of 1575.42MHz, but different C/A codes, so a single front end may be used. To achieve better sky covera ge and accelerated operation, more than one antenna
can be used. In this case, separate front -ends can be used. Using switches based on Philips’ PIN-diodes
makes it possible to select the antenna with the best signal in e.g. automotive applications for ope ration
in a city.
Each GLONASS satellite will use a different carrier frequency in the range of 1602.5625MHz to
1615.5MHz, with 562.5KHz spacing, but all with the same spreading code. The normal method for
receiving these signals uses of several parallel working front-ends, perhaps with a common first LNA and
mixer, but certainly with different final local oscillators and IF mixer.
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 16 of 35
Comparison of the front-ends used in a GPS and in a GLONASS receiver:
C/A Code on L1 No
C/A Code on L1
L2C Code on L2
New Code on L5
L1 Code and
Carrier
L2 Carrier
Data Link
L1 Code and
Carrier
L2 Code and
Carrier
L5 Code and
Carrier
Data Link
Competition Satellite based navigation systems:
second
reference base
station
No 1-5m
Yes 2cm
Yes 2cm
Resolution Comments
Before May 2000: 25-
100m Today 6-10m
(resolution controlled
by US)
5th edition
- - -
Eliminates need for
costly DGPS in many
non-safety
applications.
max. distance too
reference 10km
max. distance too
reference 100km;
faster recovery
following signal
interruption
field strength is very weak and cause a
negative SNR in the receiver input
circuit caused by the Nyquist Noise
determined by the Analog Front -End IF
bandwidth:
Satellite
Generation
II/IIA/IIR
IIR-M/IIF
dBW
Channel
L1 -158.5dBW
L2 -164.5dBW
L1 -158.5dBW
L2 -160.0dBW
log10=
C/A
Loop peek
P
W
1
Page 17

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
Avionics
Survey /
Car Navigation
Military
Marine
Tracking /
Application examples:
5th edition
GPS Marked & Applications
- Personal Navigations
- Railroads
- Recreation, walking-tour
- Off shore Drilling
- Satellite Ops. Ephemeris Timing
- Surveying & Mapping
- Network Timing,
Synchronization
- Fishing & Boat
- Arm Clocks
- Laptops and Palms
- Mobiles
- Child safety
- Car navigation systems
- Fleet management systems
- Telecom Time reference
- High way toll system
- First-Aid call via mobiles
OEM
Machine
Control
Mapping
Marked of GPS Applications
Consumer
References:
- Office of Space Commercialization, United States Department of Commerce
- U.S. Coast Guard Navigation Center of Excellence
- NAVSTAR Global Positioning System
- NAVSTAR GPS USER EQUIPMENT INTRODUCTION
- Royal school of Artillery, Basic science & technology section, BST, gunnery careers courses, the
NAVSTAR Global Positioning System
, …
Simplified block diagram of a typically GPS receiver analog front-end IC
Typically, an integrated double superheat -receiver technology is used in the analog rail. The under
sampling analog to digital converter (ADC) is integrated in the analog front -end IC with a resolution of 1
to 2bit. Due to under sampling, it acts as the third mixer for down converting into to the digital stream IF
band. Behind this ADC, the digital Baseband Processor is located. Till this location, the SNR of the
received satellite signals is negative. In the Baseband Processor, the digital IF signal is parallel
processed in several C/A correlators and NAV -data code discriminators. During this processing, the
effective Nyquest Bandwidth is shrink down to few Hertz, dispreading and decoding of the GPS signal is
made causing a positive SNR. Because typically front -end ICs are designed in a high-integrated low
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 17 of 35
Page 18

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
power relative noisy semiconductor process, there is a need of an external Low-Noise-Amplifier (LNA)
combined with band pass-filters. Because the available GPS IC chipsets on the market differ in their
electrically performances like, Gain, Noise Figure (NF), linearity and sensitivity, therefore one and two stage discrete front-end amplifiers are used. The numbers of filters in the front -end vary with the needs
on the applications target environment, costs and sizes. The processed number of GPS carriers as well
as the navigation accuracy does determine the min. allowed band width of the analog-front end rail.
Philips Semiconductors offer MMICs with internal 50Ω matches at the input and output (I/O) and without
internal matching. The internal matched broadband MMICs typically need an output inductor for DC
biasing and DC decoupling capacitors at the amplifier I/O. The internal non -matched devices need I/O
matching network typically made by lumped LC circuits in a L-arrangement. This gives additionally
selectivity. Another advantage of this MMIC is the integrated temperature compensation in contrast to a
transistor. In a system, typically the first amplifier’s noise figure is very important. E.g. the BGU2003 SiGe
MMIC offers both (NF+IP3) with a good quality. It’s Si made brother BGA2003 come with lower amount
of IP3 and NF. IC chip -sets with a need of high front-end gain made by one MMIC may be able to use
BGM1011 or BGM1013. Two-stage design e.g. will use BGA2001, BGA2011 eventually combined with
BGA2748 or BGA2715 or BGA2717. Some examples of configuration for an L1 -carrier LNA are shown in
the next two tables.
Single Front-End amplifier:
Amplifier BFG
325W
Gain 14dB 20dB 14dB 34dB 35dB 18dB 12dB 14dB 14dB 23.2dB 21dB
NF 1dB 0.9dB 1.1dB 4.7dB 4.7dB 1.1dB 1.5dB 1.3dB 1.8dB 2.7dB 2dB
IP3o(out) +24dBm +21dBm +21dBm +21dBm +20dBm +15dBm +10dBm +9.5dBm +9.2dBm +1dBm -1.6dBm
Matching External External External Internal Internal External External External External Internal Internal
BFU
540
BGU
2003
BGM
1013
BGM
1011
BFG
410W
BGA
2011
BGA
2001
BGA
2003
BGA
2715
BGA
2748
Two-cascaded circuit Front-End amplifier:
1st Stage BFG325W BFG410W BFG410W BFU540 BFG325W BGA2011 BGU2003 BGA2011 BGA2003 BGA2011
2nd Stage BFU540 BFU540 BGU2003 BFG410W BFG410W BGA2011 BGA2001 BGA2715 BGA2715 BGA2748
Cascaded
Gain
Cascaded
NF
Cascaded
IP3o
31dB 35dB 29dB 35dB 29dB 21dB 25dB 32.2dB 34dB 30dB
1.19dB 1.25dB 1.32dB 1.11dB 1.28dB 2dB 1.5dB 2.5dB 2.6dB 2.2dB
+21dBm +21dBm +21dBm +15dBm +15dBm +10dBm +9.5dBm +1dBm +1dBm -1.6dBm
Note: [1] Gain=|S21|2; data @ 1.8GHz or the next one / approximated, found in the data sheet /
diagrams
[2] For cascaded amplifier equations referee to e.g. 4th Edition RF Manual Appendix, 2.4GHz
Generic Front -End reference design
[3] The evaluated cascaded amplifier includes an example interstage filter with 3dB insertion loss
(NF=+3dB; IP3=+40dBm).
[4] MMICs: BGAxxxx, BGMxxxx, BGUxxxx Transistors: BFGxxx, BFUxxx
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 18 of 35
Page 19

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
Figure1: The position of the LNA inside the 2.
4GHz Generic Front
-
End
BAP51
-02
BGU2003
BGA6589
Reference
5th edition
Appendix D: 2.4GHz Generic Front-End
Reference design
Complete design description in previous RF Manual (4th edition),
including datasheet. Downloadable via RF Manual website:
http://www.philips.semiconductors.com/markets/mms/products/discretes/documentation/rf_manual
Description of the generic Front-End
This note describes the design and realization of a 2.4GHz ISM front end (Industrial-
Scientific-Medical). Useful for wireless communication applications, LAN and e.g.
Video/TV signal transmission. It covers power amplifier (PA) design in the Tx path, Low
Noise Amplifier (LNA) design in the Rx path and RF multiplexing towards the antenna.
Though actual IC processes enable front-end integration to a certain extend, situations
do exists were dedicated discrete design is required, e.g. to realize specific output
power. On top of the factual design, attention is paid to interfacing the front end to
existing Philips IC. More then trying to fit a target application, our intention here is to
illustrate generic discrete Front end design methodology.
Board
§ The job of the Front-End in an application
The board supports half duplex operation. This means the TX and RX operation are not
possible at the same time. The time during TX and RX activity are so called time slots
or just slots. The order of the TX and RX slots is specific for the selected standard.
Special handshaking activities consist of several TX and RX slots put together in to the
so-called time-frame or just frame. The user points / access points linked in this
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 19 of 35
Page 20

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
wireless application must follow the same functionality of slots, same order of frames
and timing procedure (synchronization). These kind of issues must be under the
control of specific rules (standard) normally defined by Institutes or Organization like
ETSI, IEEE, NIST, FCC, CEPT, and so on.
Applications for the Reference Board
Some application ideas for the use of the Generic Front -End Reference Board
§ 2.4GHz WLAN
§ Wireless video, TV and remote control signal transmission
§ PC to PC data connection
§ PC headsets
§ PC wireless mouse, key board, and printer
§ Palm to PC, Keyboard, Printer connectivity
§ Supervision TV camera signal transmission
§ Wireless loudspeakers
§ Robotics
§ Short range underground walky-talky
§ Short range snow and stone avalanche person detector
§ Key less entry
§ Identification
§ Tire pressure systems
§ Garage door opener
§ Remote control for alarm-systems
§ Intelligent kitchen (cooking place, Microwave cooker and washing machine operator reminder)
§ Bluetooth
§ DSSS 2.4GHz WLAN (IEEE802.11b)
§ OFDM
§ 2.4GHz WLAN (IEEE802.11g)
§ Access Points
§ PCMCIA
§ PC Cards
§ 2.4GHz Cordless telephones
§ Wireless pencil as an input for Palms and PCs
§ Wireless hand scanner for a Palm
§ Identification for starting the car engine
§ Wireless reading of gas counters
§ Wireless control of soft -drink /cigarette/snag - SB machine
§ Communication between bus/taxi and the stop lights
§ Panel for ware house stock counting
§ Printers
§ Mobiles
§ Wireless LCD Display
§ Remote control
§ Cordless Mouse
§ Automotive, Consumer, Communication
Please note:
The used MMICs and PIN diodes can be used in other frequency ranges e.g. 300MHz to 3GHz for
applications like communication, networking and ISM too.
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 20 of 35
Page 21

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
NIST =
Nat
ional Institute of Standards and Technology
SRD
= Radio Frequency Identification
NUS
5th edition
Selection of Applications in the 2.4GHz environment
Application
Bluetooth; 1Mbps IEEE802.15.1
WiMedia , (802.15.3a@3.1-10.6GHz)
ZigBee; 1000kbps@2450MHz
Other Frequency(868; 915)MHz
DECT@ISM ETSI 2400 MHz 2483MHz 2441.5MHz 83/
IMT-2000 =3G; acc., ITU, CEPT, ERC
ERC/DEC/(97)07; ERC/DEC/(99)25
(=UMTS, CDMA2000, UWC-136, UTRAFDD, UTRA-TDD)
USA - ISM 2400MHz 2483.5MHz 2441.75MHz 83.5/
Wireless LAN; Ethernet; (5.2; 5.7)GHz IEEE802.11; (a, b, …) 2400MHz 2483MHz 2441.5MHz
Wi-Fi; 11-54Mbs; (4.9-5.9)GHz IEEE802.11b; (g, a) 2400MHz 2483MHz 2441.5MHz
RFID ECC/SE24 2446MHz 2454MHz 2.45GHz
Wireless LAN; 11Mbps IEEE802.11b 2412MHz 2462MHz 2437MHz 56/
Wireless LAN; 54Mbps IEEE802.11g
WPLAN NIST 2400MHz
HomeRF; SWAP/CA, 0.8-1.6Mbps
Fixed Mobile; Amateur Satellite; ISM, SRD,
RLAN, RFID
Fixed RF transmission acc. CEPT Austria regulation 2400MHz 2450MHz 2425MHz 50/
MOBIL RF; SRD acc. CEPT Austria regulation 2400MHz 2450MHz 2425MHz 50/
Amateur Radio FCC 2390MHz 2450MHz 60/
UoSAT-OSCAR 11, Telemetry
AMSAT-OSCAR 16
DOVE-OSCAR 17
Globalstar, (Mobile Downlink) Loral, Qualcomm 2483.5MHz 2500MHz
Ellipso, (Mobile Downlink) Satellite; Supplier Ellipsat 2483.5MHz 2500MHz
Aries, (Mobile Downlink) (now Globalstar?)
Odyssey, (Mobile Downlink) Satellite; Supplier TRW 2483.5MHz 2500MHz
Orbcomm Satellite (LEO) eg. GPSS-GSM Satellite 2250,5MHz
Ariane 4 and Ariane 5 (ESA, Arianespace) tracking data link for rocket 2206MHz
Atlas Centaur eg. carrier for Intelsat IVA F4 tracking data link for rocket 2210,5MHz
J.S. Marshall Radar Observatory 700KW Klystron TX S-Band
Raytheon ASR -10SS Mk2 Series S-Band
Solid-State Primary Surveillance Radar
Phase 3D; Amateur Radio Satellite; 146MHz,
436MHz, 2400MHz
Apollo 14-17; NASA space mission transponder experiments S-Band
ISS; (internal Intercom System of the ISS
station)
MSS Downlink UMTS 2170 2200
Standardization name/
issue
IEEE802.15.3 (camera,
video)
IEEE802.15.4
FDD Uplink (D)
FDD Downlink (D)
TDD (D)
ERC, CEPT Band Plan 2400MHz 2450MHz 2425MHz 50/
Amateur Radio Satellite UO11
Amateur Radio Satellite AO16
Amateur Radio Satellite DO17
Satellite; Supplier
Constellation
US FAA/DoD ASR -11
used in U.S. DASR program
AMSAT; 250Wpep TX S-Band 2.4KHz, SSB
Space 2.4GHz
Start frequency Stop Frequency
NUS/EU=2402MHz
(All)=2402MHz
2.4GHz 2.49GHz 2.45GHz
US=2402MHz
EU=2412MHz
≈1920 ≈1980
≈2110 ≈2170
≈1900 ≈2024
NUS/EU=2402MHz
(All)=2402
2401.5MHz
2401.1428MHz
2401.2205MHz
2483.5MHz 2500MHz
2700 2900
NUS/EU=2480MHz
(All)=2495MHz
US=2480MHz
EU=2472MHz
NUS/EU=2480MHz
(All)=2495
Centre
frequency
2442.5MHz
2441MHz
Exact Frequency
range depending on
country & system
supplier
S-Band
S-Band Radar
≈2400MHz
Abbreviations: European Radio communication Committee (ERC) within the European Conference of Postal and Telecommunication
Administration (CEPT)
WPLAN = Wireless Personal Area Networks
WLAN = Wireless Local Area Networks
ISM = Industrial Scientific Medical
LAN = Local Area Network
IEEE = Institute of Electrical and Electronic Engineers
= Short Range Device
RLAN = Radio Local Area Network
ISS = International Space Station
IMT = International mobile Telecommunications at 2000MHz
MSS = Mobile Satellite Service
W-CDMA = Wideband-CDMA
GMSK = Gaussian Minimum Shift Keying
UMTS = Universal Mobile Telecommunication System
UWC = Universal Wireless Communication
MSS Downlink = Mobile Satellite Service of UMTS
4322 252 06394 © Koninklijke Philips Electronics N.V.
RFID
OSCAR = Orbit Satellite Carry Amateur Radio
FHSS = Frequency Hopping Spread Spectrum
DSSS = Direct Sequence Spread Spectrum
DECT = Digital Enhanced Cordless Telecommunications
= North America
EU = Europe
ITU = International Telecommunications Union
ITU-R = ITU Radio communication sector
(D) = Germany
TDD = Time Division Multiplex
FDD = Frequency Division Multiplex
TDMA = Time Division Multiplex Access
CDMA = Code Division Multiplex Access
2G = Mobile Systems GSM, DCS
3G = IMT-2000
RF Manual Appendix October 2004 21 of 35
Bandwidth-MHz/
Channel Spacing-
NUS/EU=78/1MHz
(All)=93/1MHz
US=83/4MHz
EU=60/4
(TDD, FDD; WCDMA,
TD-CDMA);
paired 2x60MHz (D)
non paired 25MHz (D)
83/FHSS=1MHz;
DSSS=25MHz
78/1MHz, 3.5MHz
93/1MHz, 3.5MHz
MHz
Page 22

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
Schematic
Figure 4: Schematic of the Reference Board
5th edition
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 22 of 35
Page 23

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
Part List
Part
Number
IC1 BGU2003 SOT363 LNA-MMIC Philips Semiconductors BGU2003 PHL
IC2 BGA6589 SOT89 TX-PA-MMIC Philips Semiconductors BGA6589 PHL
Q1 PBSS5140T SOT23 TX PA-standby control Philips Semiconductors PBSS5140T PHL
Q2 BC847BW SOT323 Drive of D3 Philips Semiconductors BC847BW PHL
Q3 BC857BW SOT323 SPDT switching Philips Semiconductors BC857BW PHL
Q4 BC847BW SOT323 PA logic level compatibility Philips Semiconductors BC847BW PHL
D1 BAP51-02 SOD523 SPDT-TX; series part of the PIN diode switch Philips Semiconductors BAP51-02 PHL
D2 BAP51-02 SOD523 SPDT-RX; shunt part of the PIN diode switch Philips Semiconductors BAP51-02 PHL
D3 LYR971 0805 LED, yellow, RX and bias current control of IC1 OSRAM 67S5126 Bürklin
D4 LYR971 0805 LED, yellow; TX OSRAM 67S5126 Bürklin
D5 LYR971 0805 LED, yellow; SPDT; voltage level shifter OSRAM 67S5126 Bürklin
D6 BZV55-B5V1 SOD80C Level shifting for being 3V/5V tolerant Philips Semiconductors BZV55-B5V1 PHL
D7 BZV55-C10 SOD80C Board DC polarity & over voltage protection Philips Semiconductors BZV55-C10 PHL
D8 BZV55-C3V6 SOD80C Board DC polarity & over voltage protection Philips Semiconductors BZV55-C3V6 PHL
D9 BZV55-C3V6 SOD80C Board DC polarity & over voltage protection Philips Semiconductors BZV55-C3V6 PHL
R1
R2 1k8 0402 LNA MMIC current CTRL
R3 optional 0402 L2 resonance damping; optional --- optional
R4
R5
R7 39k 0402 Q3 bias SPDT
R8
R9 39k 0402 Helps switch off of Q1
R10 2k2 0402 Q1 bias PActrl
R11
R12 82k 0402 Q2 drive
R13
R14
R15 4k7 0402 Improvement of SPDT-Off
R16 100k 0402 PActrl; logic level conversion
R17 47k 0402 PActrl; logic level conversion
L1 22nH 0402 SPDT RF blocking for biasing Würth Elektronik, WE-MK 744 784 22 WE
L2 1n8 0402 LNA output matching Würth Elektronik, WE-MK 744 784 018 WE
L3 8n2 0402 PAout Matching Würth Elektronik, WE-MK 744 784 082 WE
L4 18nH 0402 LNA input match Würth Elektronik, WE-MK 744 784 18 WE
L5 6n8 0402 PA input matching Würth Elektronik, WE-MK 744 784 068 WE
C1 1nF 0402 medium RF short for SPDT bias Murata, X7R GRP155 R71H 102 KA01E Murata
C2 6p8 0402 medium RF short for SPDT bias Murata, C0G
C3 6p8 0402 Antenna DC decoupling Murata, C0G
C4 2p2 0402 RF short SPDT shunt PIN Murata, C0G
C5 2p7 0402 DC decoupling LNA input + match Murata, C0G
C6 4p7 0402 RF short out put match Murata, C0G
C7 1p2 0402 LNA output matching Murata, C0G GRP1555 C1H 1R2 CZ0E Murata
C8 2u2/10V 0603
C9 100nF/16V 0402 Ripple rejection PA Murata, Y5V GRM155 F51C 104 ZA01D Murata
C10 22pF 0402 DC decoupling PA input Murata, C0G GRP1555 C1H 220 JZ01E Murata
C11 6p8 0402 RF short-bias PA Murata, C0G
C12 1nF 0402 PA, Supply RF short Murata, X7R GRP155 R71H 102 KA01E Murata
Value Size Function / Short explanation
150Ω
47Ω
270Ω
150Ω
1kΩ
150Ω
150Ω
0402 SPDT bias
0402 LNA MMIC collector bias
0402 RX LED current adj.
0805
0402 LED current adjust; TX-PA
0805 PA-MMIC collector current adjust
0805 PA-MMIC collector current adjust
PA-MMIC collector current adjust and
temperature compensation
Removes the line ripple together with R8-R14
from
PA supply rail
Manufacturer
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Yageo RC0805
Vitrohm503
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Yageo RC0805
Vitrohm503
Yageo RC0805
Vitrohm503
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Yageo RC0402
Vitrohm512
Murata, X5R
Order Code
26E558 Bürklin
26E584 Bürklin
26E546 Bürklin
26E564 Bürklin
26E616 Bürklin
11E156 Bürklin
26E616 Bürklin
26E586 Bürklin
26E578 Bürklin
26E624 Bürklin
11E156 Bürklin
11E156 Bürklin
26E594 Bürklin
26E626 Bürklin
26E618 Bürklin
GRP1555 C1H 6R8
DZ01E
GRP1555 C1H 6R8
DZ01E
GRP1555 C1H 2R2
CZ01E
GRP1555 C1H 2R7
CZ01E
GRP1555 C1H 4R7
CZ01E
GRM188 R61A 225
KE19D
GRP1555 C1H 6R8
DZ01E
Order
source
Murata
Murata
Murata
Murata
Murata
Murata
Murata
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 23 of 35
Page 24

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
Part
Number
C14 2p7 0402 TX-PAout DC decoupling + matching Murata, C0G
C15 10u/6.3V 0805 dc rail LNVcc Murata, X5R GRM21 BR60J 106 KE19B Murata
C16 1nF 0402 dc noise LNctrl Murata, X7R GRP155 R71H 102 KA01E Murata
C17 2u2/10V 0603 PA dc rail Murata, X5R GRM188 R61A 225 KE34B Murata
C18 1nF 0402 dc noise SPDT control Murata, X7R GRP155 R71H 102 KA01E Murata
C19 1nF 0402 dc noise PActrl Murata, X7R GRP155 R71H 102 KA01E Murata
C20 1nF 0402 dc noise LNVcc Murata, X7R GRP155 R71H 102 KA01E Murata
C21 4p7 0402 RF short for optional LNA input match Murata, C0G
C22 6p8 0402 dc removal of RX-BP filter and matching Murata, C0G
C23 6p8 0402 dc removal of TX-LP filter and matching Murata, C0G
BP1 fo=2.4GHz 1008 RX band pass input filtering Würth Elektronik 748 351 024 WE
LP1 fc=2.4GHz 0805 TX low pass spurious filtering Würth Elektronik 748 125 024 WE
X1
X2
X3
X4 BÜLA30K green
X5 BÜLA30K red
X6 BÜLA30K black
X7 BÜLA30K yellow
X8 BÜLA30K blue
X9 BÜLA30K red
Y1
Y2
Y3
Y4
Y5
Y6
Z1 - Z6 M2 M2 x 3mm Screw for PCB mounting Paul-Korth GmbH NIRO A2 DIN7985-H Paul-Korth
Z7 - Z12 M2,5
W1
W2
Value Size Function / short explanation
SMA, female
µStrip tab pin
SMA, female
µStrip tab pin
SMA, female
µStrip tab pin
blue
{ PActrl }
red
{ PAVcc }
green
{ LNctrl }
black
{ GND }
yellow
{ SPDT }
white
{ LNVcc }
FR4
compatible
Aluminum
metal
finished
yellow
Aludine
12.7mm
flange
1.3mm tab
12.7mm
flange
1.3mm tab
12.7mm
flange
1.3mm tab
40cm,
0.5qmm
40cm,
0.5qmm,
40cm,
0.5qmm,
40cm,
0.5qmm
40cm,
0.5qmm,
40cm,
0.5qmm,
M2,5 x
4mm
47,5mm X
41,5mm
47,5mm X
41,5mm X
10mm
Antenna connector, SMA, panel launcher,
female, bulkhead receptacle with flange, PTFE,
CuBe, CuNiAu
RX-Out connector, SMA, panel launcher,
female, bulkhead receptacle with flange, PTFE,
CuBe, CuNiAu
TX-IN connector, SMA, panel launcher, female,
bulkhead receptacle with flange, PTFE, CuBe,
CuNiAu
LNctrl, BÜLA30K, Multiple spring wire plugs,
Solder terminal
PAVcc, BÜLA30K, Multiple spring wire plugs,
Solder terminal
GND, BÜLA30K, Multiple spring wire plugs,
Solder terminal
SPDT, BÜLA30K, Multiple spring wire plugs,
Solder terminal
PActrl, BÜLA30K, Multiple spring wire plugs,
Solder terminal
LNVcc, BÜLA30K, Multiple spring wire plugs,
Solder terminal
Insulated stranded hook -up PVC wire, LiYv,
blue, CuSn
Insulated stranded hook -up PVC wire, LiYv,
red, CuSn
Insulated stranded hook -up PVC wire, LiYv,
green, CuSn
Insulated stranded hook -up PVC wire, LiYv,
black, CuSn
Insulated stranded hook -up PVC wire, LiYv,
yellow, CuSn
Insulated stranded hook -up PVC wire, LiYv,
white, CuSn
Screw for SMA launcher mounting Paul-Korth GmbH NIRO A2 DIN7985-H Paul-Korth
Epoxy 560µm; Cu=17.5µm; Ni=5µm;
Au=0.3µm two layer double side
Base metal caring the pcb and SMA connectors --- --- ---
Manufacturer
Telegärtner J01 151 A08 51 Telegärtner
Telegärtner J01 151 A08 51 Telegärtner
Telegärtner J01 151 A08 51 Telegärtner
Hirschmann 15F260 Bürklin
Hirschmann 15F240 Bürklin
Hirschmann 15F230 Bürklin
Hirschmann 15F250 Bürklin
Hirschmann 15F270 Bürklin
Hirschmann 15F240 Bürklin
VDE0812/9.72 92F566 Bürklin
VDE0812/9.72 92F565 Bürklin
VDE0812/9.72 92F567 Bürklin
VDE0812/9.72 92F564 Bürklin
VDE0812/9.72 92F568 Bürklin
VDE0812/9.72 92F569 Bürklin
www.isola.de
www.haefeleleiterplatten.de
Order Code
GRP1555 C1H 2R7
CZ01E
GRP1555 C1H 4R7
CZ01E
GRP1555 C1H 6R8
DZ01E
GRP1555 C1H 6R8
DZ01E
DURAVER®-E-Cu,
Qualität 104 MLB-DE 104
ML/2
Order
source
Murata
Murata
Murata
Murata
Häfele
Leiterplattentechnik
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 24 of 35
Page 25

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
The PCB
5th edition
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 25 of 35
Page 26

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
Appendix E: RF Application- basics
Complete RF Application-basics in previous RF Manual (4th
edition) which is downloadable via RF Manual website:
http://www.philips.semiconductors.com/markets/mms/products/discretes/documentation/rf_man
ual
1.1 Frequency spectrum
1.2 RF transmission system
1.3 RF Front-End
For: Function of an antenna, examples of PCB design, Transistor Semiconductor Process, see
RF Manual 4th edition on the RF Manual website.
1.1 Frequency spectrum
Radio spectrum and wavelengths
Each material’s composition creates a unique pattern in the radiation emitted.
This can be classified in the “frequency” and “wavelength” of the emitted radiation.
As electro-magnetic (EM) signals travel with the speed of light, they do have the character of
propagation waves.
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 26 of 35
Page 27

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
A survey of the frequency bands and related wavelengths:
Band Frequency
Definition
(English)
VLF 3kHz to 30kHz Very Low Frequency
LF 30kHz to 300kHz Low Frequency
MF 300kHz to 1650kHz Medium Frequency
1605KHz to 4000KHz
Boundary Wave Grenzwellen
HF 3MHz to 30MHz High Frequency
VHF 30MHz to 300MHz Very High Frequency
UHF 300MHz to 3GHz Ultra High Frequency Dezimeterwellen 1m to 10cm 9
SHF 3GHz to 30GHz Super High Frequency Zentimeterwellen 10cm to 1cm 10
EHF 30GHz to 300GHz Extremely High Frequency Millimeterwellen 1cm to 1mm 11
--- 300GHz to 3THz --- Dezimillimeterwellen 1mm-100µm 12
Definition
(German)
Längswellen
(Myriameterwellen)
Langwelle
(Kilometerwellen)
Mittelwelle
(Hektometerwellen)
Kurzwelle
(Dekameterwellen)
Ultrakurzwellen
(Meterwellen)
Wavelength - λ
acc. DIN40015
CCIR Band
100km to 10km 4
10km to 1km 5
1km to 100m 6
100m to 10m 7
10m to 1m 8
Literature researches according to the Microwave’s sub-bands showed a lot of different definitions with
very few or none description of the area of validity. Due to it, the following table will try to give an
overview but can’t act as a reference.
Source Nührmann Nührmann www.wer-
Validity IEEE Radar
Standard 521
Band GHz GHz GHz GHz GHz GHz GHz
A 0,1-0,225
C 4-8 3,95-5,8 5-6 4-8 4-8 4-8 3,95-5,8
D 1-3
E 2-3 60-90 60-90
F 2-4 90-140
G 4-6 140-220
H 6-8
I 8-10
J 10-20 5,85-8,2 5,85-8,2
K 18-27 20-40 18,0-26,5 18-26,5 10,9-36 18-26.5 18-26,5
Ka 27-40 26,5-40 17-31 26.5-40 26,5-40
Ku 12-18
L 1-3 40-60 1,0-2,6
M 60-100
mm 40-100
P 12,4-18,0 0,225-0,39 110-170 0,22-0,3
R 26,5-40,0
Q 36-46 33-50 33-50
S 3-4 2,6-3,95
U 40,0-60,0 40-60 40-60
V 46-56 50-75 50-75
W 75-110 75-110
X 8-12 8,2-12,4
US Military
Band
weiss-was.de
Satellite
Uplink
www.atcnea.
de
Primary
Radar
≈16
≈1,3
≈3
≈10
Siemens
Online
Lexicon
Frequency
bands in the
GHz Area
12,6-18 15,3-17,2 12.4-18 12,4-18
1-2 0,39-1,55 1-2 1-2,6
2-4 1,55-3,9 2-4 2,6-3,95
8-12,5 6,2-10,9 8-12.4 8,2-12,4
Siemens
Online
Lexicon
Microwave
bands
ARRL
Book
No. 3126
--- Dividing of Sat and
Wikipedia
Radar techniques
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 27 of 35
Page 28

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
1.2 RF transmission system
Simplex
5th edition
Half duplex
Full duplex
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 28 of 35
Page 29

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
1.3 RF Front -End
5th edition
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 29 of 35
Page 30

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
Appendix F: RF Design- basics
Complete RF Design-basics in previous RF Manual (4th edition). RF
Manual 4th edition downloadable via RF Manual website:
http://www.philips.semiconductors.com/markets/mms/products/discretes/documentation/rf_manual
For: Fundamentals and RF Amplifier design Fundamentals, download RF Manual 4th edition on the RF
Manual website.
Small signal RF amplifier parameters
1. Transistor parameters, DC to microwave
At low DC currents and voltages, one can assume a transistor acts like a voltage-controlled current
source with diode clamping action in the base-emitter input circuit. In this model, the transistor is
specified by its large signal DC-parameters, i.e., DC-current gain (B, ß, hfe), maximum power
dissipation, breakdown voltages and so forth.
U
BE
V
T
eII ⋅=
COC
Thermal Voltage: VT=kT/q≈26mV@25°C
ICO=Collector reverse saturation current
Low frequency voltage gain:
I
Current gain
C
ß =
I
r ='
e
V ≈
B
V
T
I
E
R
C
u
'
r
e
Increasing the frequency to the audio frequency range, the transistor’s parameters get frequency dependent phase shift and parasitic capacitance effects. For characterization of these effects, small
signal h-parameters are used. These hybrid parameters are determined by measuring voltage and
current at one terminal and by the use of open or short (standards) at the other port.
The h-parameter matrix is shown below.
h-Parameter Matrix:
u
1
=
i
2
hh
1211
hh
2221
i
1
∗
u
2
Increasing the frequency to the HF and VHF ranges, open ports become inaccurate due to electrically
stray field radiation. This results in unacceptable errors. Due to this phenomenon y-parameters were
developed. They again measure voltage and current, but use of only a “short” standard. This “short”
approach yields more accu rate results in this frequency region. The y-parameter matrix is shown
below.
y-Parameter Matrix:
i
1
=
i
2
yy
yy
u
1211
2221
1
∗
u
2
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 30 of 35
Page 31

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
5th edition
Further increasing the frequency, the parasitic inductance of a “short” causes problem due to
mechanical depending parasitic. Additionally, measuring voltage, current and it’s phase is quite tricky.
The scattering parameters, or S-parameters, were developed based on the measurement of the
forward and backward traveling waves to determine the reflection coefficients on a transistor’s
terminals (or ports). The S-parameter matrix is shown below.
S-Parameter Matrix:
b
1
=
b
2
SS
SS
a
1211
2221
1
∗
a
2
2. Definition of the S-Parameters
Every amplifier has an input port and an output port (a 2-port network). Typically the input port is
labeled Port-1 and the output is labeled Port-2.
Matrix:
Equation:
b
1
=
b
2
SS
SS
Figure 10: Two-port Network’s (a) and (b) waves
The forward-traveling waves (a) are traveling into the DUT’s (input or output) ports.
The backward-traveling waves (b) are reflected back from the DUT’s ports
The expression “port ZO terminate” means the use of a 50Ω-standard. This is not a conjugate complex
power match! In the previous chapter the reflection coefficient was defined as:
Reflection coefficient:
r =
ng waveback runni
nning waveforward ru
b
Calculating the input reflection factor on port 1:
S
That means the source injects a forward-traveling wave (a1) into Port-1. No forward-traveling power
(a2) injected into Port-2. The same procedure can be done at Port-2 with the
b
Output reflection factor:
S
2
with the input terminated in ZO.
22
0
==a
1
a
2
waveoutput
Gain is defined by:
gain
=
waveinput
The forward-traveling wave gain is calculated by the wave (b2) traveling out off Port-2 divided by the
wave (a1) injected into Port-1.
b
S
2
21
0
==a
2
a
1
1
with the output terminated in ZO.
11
0
==a
2
a
1
a
1211
2221
⋅+⋅=
⋅+⋅=
1
∗
aSaSb
2121111
aSaSb
2221212
a
2
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 31 of 35
Page 32

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
IN OUT
Detector
Forward transmission:
(
)
(
)
(
)
(
)
(
)
5th edition
The backward traveling wave gain is calculated by the wave (b1) traveling out off Port-1 divided by
b
the wave (a2) injected into Port-2.
The normalized waves (a) and (b) are defined as:
1
a
2
a
2
b
2
b
2
( )
Z
O
1
( )
Z
O
1
( )
Z
O
1
( )
Z
O
iZV
⋅+= = signal into Port-1
111
O
iZV
⋅+= = signal into Port-2
222
O
iZV
⋅+= = signal out of Port-1
111
O
iZV
⋅+= = signal out of Port-2
212
O
S
The normalized waves have units of tWat and are
1
12
0
==a
1
a
2
dBS20logFT21=
Isolation:
dBS20logS12(dB)12−=
Input Return Loss:
−=
dBS20logRL
11in
Output Return Loss:
−=
dBS20logRL
22OUT
Insertion Loss:
dBS20logIL21−=
referenced to the system impedance ZO. It is shown by
the following mathematical analyses:
The relationship between U, P an ZO can be written as:
u
Z
O
a
V
1
+=
Z
O
ZiP
⋅== Substituting:
O
iZ
⋅
O
Z
22
O
P
11
1
+=
2
iZ
⋅
O
1
Z
2
O
Z
0
Z
Z
=
O
O
Rem:
Z
O
Z
ZZ
⋅
U
OO
ZZ
⋅
OO
2
=
O
IUP
=⋅= è RI
R
⋅
=
Z
U
P ⋅==
R
ZZ
OO
Z
=
O
O
⋅
a
1
Because
O
+= è
V
forward
a =
1
, the normalized waves can be determined the measuring the voltage of a
Z
O
forward-traveling wave referenced to the system impedance constant
PPiZP
1111
+=
2222
Pa = (è Unit =
11
Watt = )
Volt
Ohm
Z . Directional couplers or
O
VSWR bridges can divide the standing waves into the forward- and backward-traveling voltage wave.
(Diode) Detectors convert these waves to the V
forward
and V
backward
DC voltage. After an easy
processing of both DC voltages, the VSWR can be read.
V
forward
V
backward
50Ω VHF-SWR-Meter built from a kit (Nuova Elettronica). It
consists of three strip-lines. The middle line passes the main
signal from the input to the output. The upper and lower striplines select a part of the forward and backward traveling waves
by special electrical and magnetic cross-coupling. Diode
detectors at each coupled strip-line-end rectify the power to a
DC voltage, which is passed to an external analog circuit for
processing and monitoring of the VSWR. Applications: Power
antenna match control, PA output power detector, vector
voltmeter, vector network analysis, AGC, etc. These kinds of
circuit’s kits are published in amateur radio literature and in
several RF magazines.
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 32 of 35
Page 33

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
Input return loss
2-Port Network definition
5th edition
=S
11
portinput from reflectedPower
portinput at generator from availablePower
Output return loss
=S
22
portoutput from reflectedPower
Forward transmission loss (insertion loss)
=S
Figure 11: S-Parameters in the Two-port Network
21
Reverse transmission loss (isolation)
=S
12
Philips’ data sheet parameter Insertion power gain |S21|2:
gainpower Transducer
gainpower r transduceReverse
2
21
log20log10 SdBSdB ⋅=⋅
21
Example: Calculate the insertion power gain for the BGA2003 at 100MHz, 450MHz,
1800MHz, and 2400MHz for the bias set-up V
VS-OUT
=2.5V, I
VS-OUT
=10mA.
Calculation: Download the S-Parameter data file [2_510A3.S2P] from the Philips’ website
page for the Silicon MMIC amplifier BGA2003.
This is a section of the file:
# MHz S MA R 50
! Freq S11 S21 S12 S22 :
100 0.58765 -9.43 21.85015 163.96 0.00555 83.961 0.9525 -7.204
400 0.43912 -28.73 16.09626 130.48 0.019843 79.704 0.80026 -22.43
500 0.39966 -32.38 14.27094 123.44 0.023928 79.598 0.75616 -25.24
1800 0.21647 -47.97 4.96451 85.877 0.07832 82.488 0.52249 -46.31
2400 0.18255 -69.08 3.89514 76.801 0.11188 80.224 0.48091 -64
Results: 100MHz è 20⋅log(21.85015) = 26.8 dB
44.12348.130
°°
27094.1409626.16
450MHz è dB
dB 6.23
log20
+
ee
=
2
1800MHz è20⋅log(4.96451) = 13.9 dB
2400MHz è20⋅log(3.89514) = 11.8 dB
portoutput at generator from availablePower
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 33 of 35
Page 34

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
3-Port s
-
parameter definition:
5th edition
3-Port Network definition
Typical vehicles for 3-port s-parameters are: Directional couplers, power splitters, combiners, and
phase splitters.
§ Port reflection coefficient / return loss:
b
1
11
22
33
21
31
32
12
31
23
|
a
1
b
2
|
a
2
b
3
|
a
3
b
2
|
=
=
=
=
3
a
1
b
3
|
==a
2
a
1
b
3
|
==a
1
a
2
b
1
|
=
3
a
2
b
1
|
=
2
a
3
b
3
|
==a
1
a
2
Figure 12: Three-port Network's (a) and (b) waves
Port 1 è
Port 2 è
Port 3 è
§ Transmission gain:
Port 1=>2 è
Port 1=>3 è
Port 2=>3 è
Port 2=>1 è
Port 3=>1 è
Port 3=>2 è
S
S
S
S
S
S
S
S
S
0)a ;0(
===a
32
0)a ;0(
===a
31
0)a ;0(
===a
21
0)a(
)0(
)0(
0)a(
0)a(
)0(
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 34 of 35
Page 35

Philips Semiconductors
RF Manual
APPENDIX
Product and design manual for RF Products
not form part of any quotation or contract, is believed to be accurate and reliable and may
Date of release: October 2004
order number: 4322 252 06394
MAIN FILE RF Manual
In separate file !
5th edition
Download main RF Manual from internet:
http://www.philips.semiconductors.com/markets/mms/products/discretes/documentation/rf_manual
© Koninklijke Philips Electronics N.V. 2004
All rights are reserved. Reproduction in whole or in part is prohibited without the prior
4322 252 06394 © Koninklijke Philips Electronics N.V.
RF Manual Appendix October 2004 35 of 35
written consent of the copyright owner. The information presented in this document does
be changed without notice. No liability will be accepted by the publisher for any
consequence of its use. Publication thereof does not convey nor imply any license under
patent- or other industrial or intellectual property rights.
Document
Published in The Netherlands
 Loading...
Loading...