

查询PDI1394P24BD供应商
INTEGRATED CIRCUITS
PDI1394P24
2-port 400 Mbps physical layer interface
Objective data
Supersedes data of 2000 Aug 02
2001 Sep 06
Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
1.0 FEATURES
•Fully supports provisions of IEEE 1394–1995 Standard for high
performance serial bus and the P1394a–2000 Standard.
1
• Fully interoperable with Firewire and i.LINK implementations of
the IEEE 1394 Standard.
2
•Full P1394a support includes:
– Connection debounce
– Arbitrated short reset
– Multispeed concatenation
– Arbitration acceleration
– Fly-by concatenation
– Port disable/suspend/resume
•Provides two 1394a fully-compliant cable ports at
100/200/400 Megabits per second (Mbps)
•Fully compliant with Open HCI requirements
• Cable ports monitor line conditions for active connection to remote
node.
•Power down features to conserve energy in battery-powered
applications include:
– Automatic device power down during suspend
– Device power down terminal
– Link interface disable via LPS
– Inactive ports powered-down
•Logic performs system initialization and arbitration functions
•Encode and decode functions included for data-strobe bit level
encoding
•Incoming data resynchronized to local clock
•Single 3.3 volt supply operation
•Minimum V
of 2.7 V for end-of-wire power-consuming devices
DD
•While unpowered and connected to the bus, will not drive TPBIAS
on a connected port, even if receiving incoming bias voltage on
that port
•Supports extended bias-handshake time for enhanced
interoperability with camcorders
•Interface to link-layer controller supports both low-cost bus-holder
isolation and optional Annex J electrical isolation
•Data interface to link-layer controller through 2/4/8 parallel lines at
49.152 MHz
•Low-cost 24.576 MHz crystal provides transmit, receive data at
100/200/400 Mbps, and link-layer controller clock at 49.152 MHz
•Does not require external filter capacitors for PLL
•Interoperable with link-layer controllers using 3.3 V and 5 V
supplies
•Interoperable with other Physical Layers (PHYs) using 3.3 V and
5 V supplies
•Node power class information signaling for system power
management
•Cable power presence monitoring
•Separate cable bias (TPBIAS) for each port
•Register bits give software control of contender bit, power class
bits, link active bit, and 1394a features
•Function and pin compatible with the Lucent FW802 400 Mbps Phy
2.0 DESCRIPTION
The PDI1394P24 provides the digital and analog transceiver functions
needed to implement a two port node in a cable-based IEEE
1394–1995 and/or 1394a network. Each cable port incorporates two
differential line transceivers. The transceivers include circuitry to
monitor the line conditions as needed for determining connection
status, for initialization and arbitration, and for packet reception and
transmission. The PDI1394P24 is designed to interface with a Link
Layer Controller (LLC), such as the PDI1394L11 or PDI1394L21.
3.0 ORDERING INFORMATION
PACKAGE TEMPERATURE RANGE ORDER CODE PKG. DWG. #
64-pin plastic LQFP 0 to +70°C PDI1394P24BD SOT314-2
1. Implements technology covered by one or more patents of Apple Computer, Incorporated and SGS Thompson, Limited.
2. Firewire is a trademark of Apple Computer Inc. i.LINK is a trademark of Sony.
2001 Sep 06
2
Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
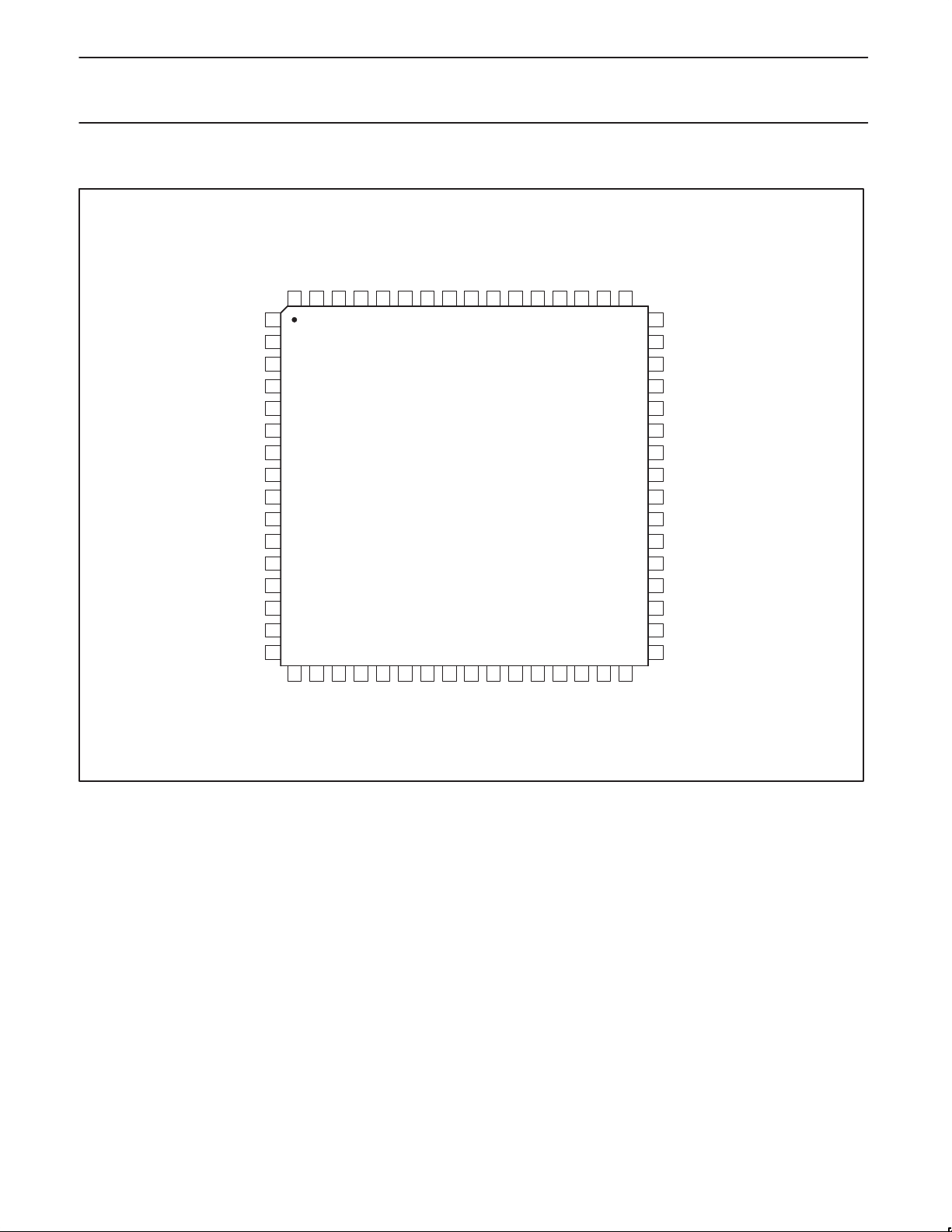
4.0 PIN CONFIGURATION
LREQ
DGND
CTL0
CTL1
DVDD
DGND
CNA
LPS
DGND
SYSCLK
62 61 60 59 58 57 56 55 5464 63 53 52 51 50 49
1
2
3
4
5
D0
6
D1
7
8
D2
9
D3
10
D4
11
D5
12
D6
13
D7
14
15
16
19 20 21 22 23 24 25
DVDD
C/LKON
DVDD
PD
/RESET
PC0
XOXIPLLGND
PLLVDD
PDI1394P24
PC1
PC2
/ISO
CPS
DGND
26 2717 18
DGND
R1
R0
AGND
28 29 30 31 32
DVDD
DVDD
TEST1
AGND
TEST0
AVDD
AVDD
AVDD
AVDD
AGND
AGND
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
NC
NC
NC
NC
NC
AVDD
TPBIAS1
TPA1+
TPA1–
TPB1+
TPB1–
TPBIAS0
TPA0+
TPA0–
TPB0+
TPB0–
2001 Sep 06
SV001823
3
Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
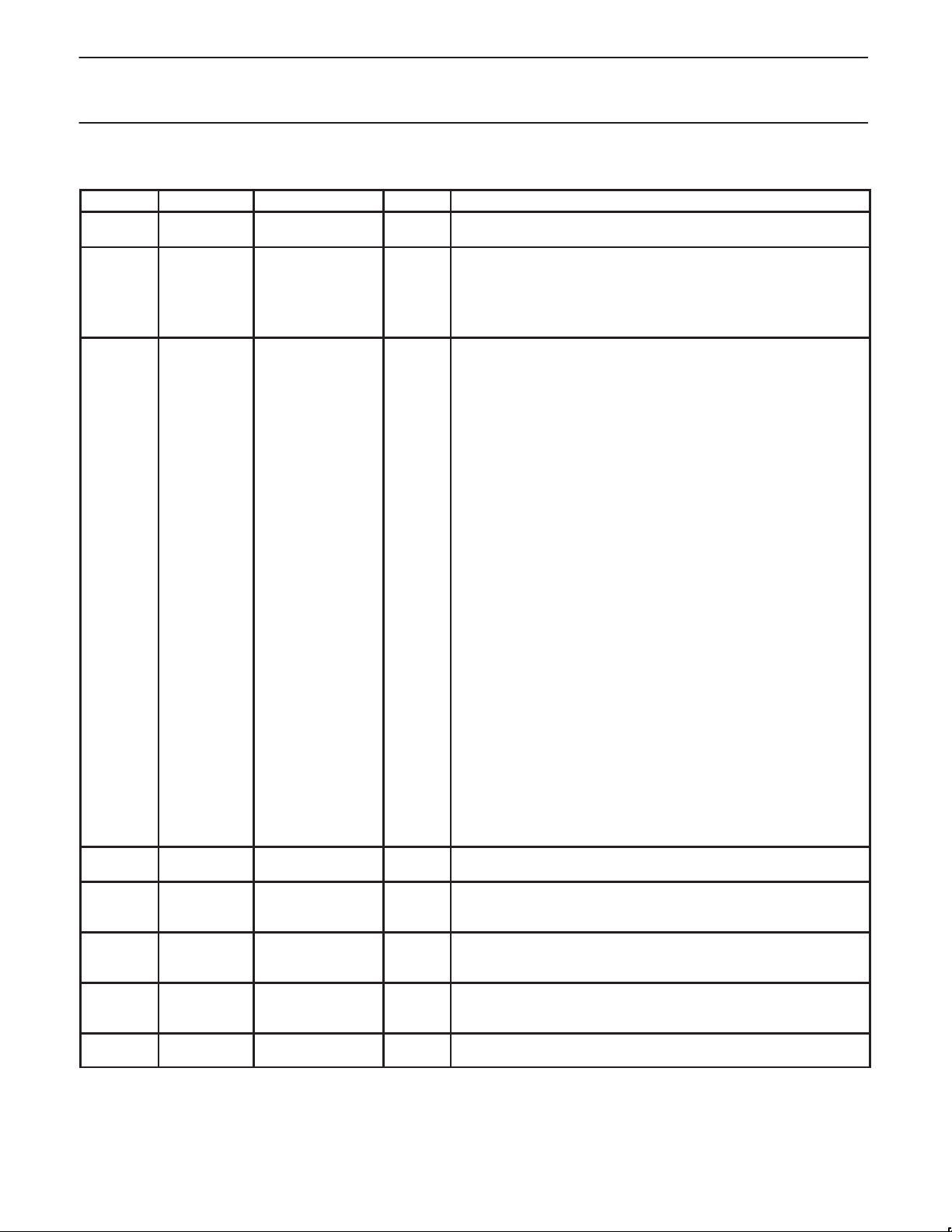
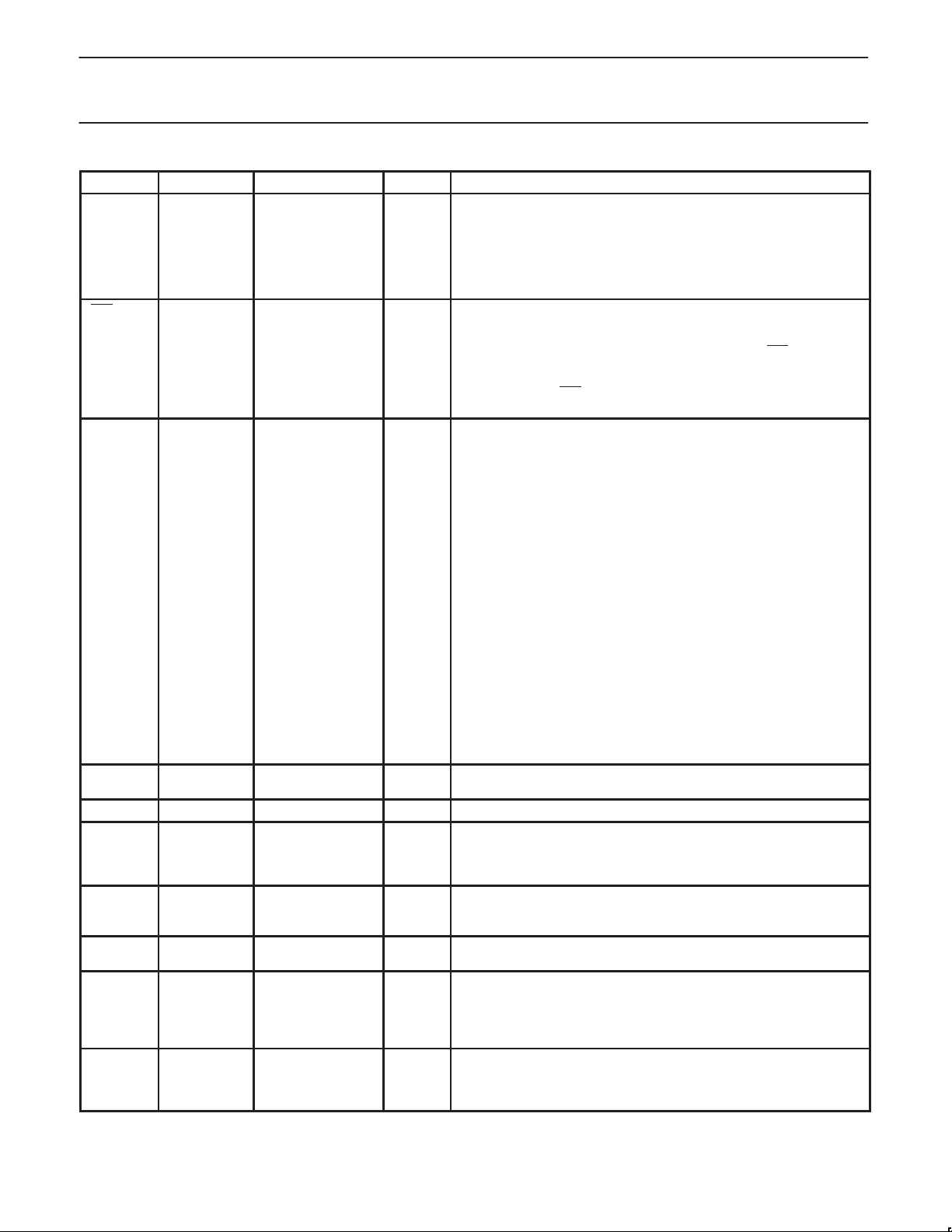
5.0 PIN DESCRIPTION
Name Pin Type Pin Numbers I/O Description
AGND Supply 32, 49, 52, 53 — Analog circuit ground terminals. These terminals should be tied together
AV
DD
C/LKON CMOS 5V tol 18 I/O Bus Manager Contender programming input and link-on output. On
CNA CMOS 15 O Cable Not Active output. This terminal is asserted high when there are
CPS CMOS 24 I Cable Power Status input. This terminal is normally connected to cable
CTL0,
CTL1
D0–D7 CMOS 5V tol 5, 6, 8, 9, 10, 1 1,
DGND Supply 2, 14, 25, 56, 64 — Digital circuit ground terminals. These terminals should be tied together
Supply 30, 31, 43, 50, 51 — Analog circuit power terminals. A combination of high frequency
CMOS 5V tol 3, 4 I/O Control I/Os. These bi-directional signals control communication
I/O Data I/Os. These are bi-directional data signals between the
12, 13
to the low impedance circuit board ground plane.
decoupling capacitors on each side are suggested, such as paralleled
0.1 µF and 0.001 µF. Lower frequency 10 µF filtering capacitors are also
recommended. These supply terminals are separated from PLLV
internal to the device to provide noise isolation. They should be
DV
DD
tied at a low impedance point on the circuit board.
hardware reset, this terminal is used to set the default value of the
contender status indicated during self-ID. Programming is done by tying
the terminal through a 10-kΩ resistor to a high (contender) or low (not
contender). The resistor allows the link-on output to override the input.
If this pin is connected to a LLC driver pin for setting Bus Manager/IRM
contender status, then a 10-kΩ series resistor should be placed on this
line between the PHY and the LLC to prevent possible contention. In this
case. the pull-high or pull-low resistors mentioned in the previous
paragraph should not be used. Refer to Figure 9.
Following hardware reset, this terminal is the link-on output, which is
used to notify the LLC to power-up and become active. The link-on
output is a square-wave signal with a period of approximately 163 ns (8
SYSCLK cycles) when active. The link-on output is otherwise driven low,
except during hardware reset when it is high impedance.
The link-on output is activated if the LLC is inactive (LPS inactive or the
LCtrl bit cleared) and when:
a) the PHY receives a link-on PHY packet addressed to this node,
b) the PEI (port-event interrupt) register bit is 1, or
c) any of the CTOI (configuration-timeout interrupt), CPSI
(cable-power-status interrupt), or STOI (state-timeout interrupt)
register bits are 1 and the RPIE (resuming-port interrupt enable)
register bit is also 1.
Once activated, the link-on output will continue active until the LLC
becomes active (both LPS active and the LCtrl bit set). The PHY also
deasserts the link-on output when a bus-reset occurs unless the link-on
output would otherwise be active because one of the interrupt bits is set
(i.e., the link-on output is active due solely to the reception of a link-on
PHY packet).
NOTE: If an interrupt condition exists which would otherwise cause the
link-on output to be activated if the LLC were inactive, the link-on output
will be activated when the LLC subsequently becomes inactive.
no ports receiving incoming bias voltage.
power through a 390 kΩ resistor. This circuit drives an internal
comparator that is used to detect the presence of cable power.
between the PDI1394P24 and the LLC. Bus holders are built into
these terminals.
PDI1394P24 and the LLC. Bus holders are built into these terminals.
Unused Dn pins should be pulled to ground through 10 kΩ resistors.
to the low impedance circuit board ground plane.
DD
and
2001 Sep 06
4
Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
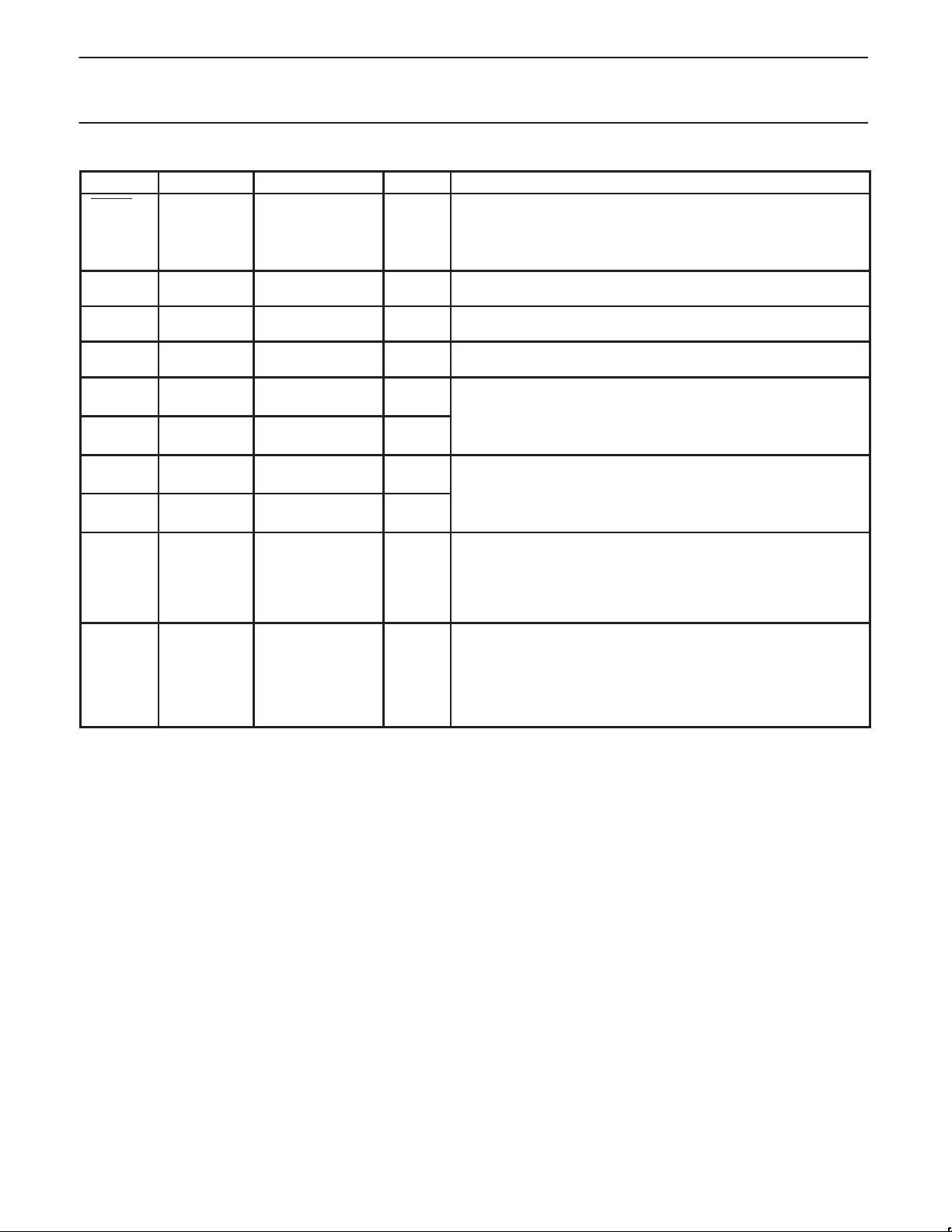
Name DescriptionI/OPin NumbersPin Type
DV
DD
ISO CMOS 23 I Link interface isolation control input. This terminal controls the operation
LPS CMOS 5V tol 16 I Link Power Status input. This terminal is used to monitor the
LREQ CMOS 5V tol 1 I LLC Request input. The LLC uses this input to initiate a service request
NC No connect 44, 45, 46, 47, 48 — No connect.
PC0, PC1,
PC2
PD CMOS 5V tol 19 I Power Down input. A logic high on this terminal turns off all internal
PLLGND Supply 58 — PLL circuit ground terminals. These terminals should be tied together to
PLLV
DD
R0, R1 Bias 54, 55 — Current setting resistor terminals. These terminals are connected to
Supply 7, 17, 26, 27, 62 — Digital circuit power terminals. A combination of high frequency
CMOS 5V tol 20, 21, 22 I Power Class programming inputs. On hardware reset, these inputs set
Supply 57 — PLL circuit power terminals. A combination of high frequency decoupling
decoupling capacitors near each side of the IC package are suggested,
such as paralleled 0.1 µF and 0.001 µF. Lower frequency 10 µF filtering
capacitors are also recommended. These supply terminals are
separated from PLLV
isolation. They should be tied at a low impedance point on the circuit
board.
of output differentiation logic on the CTL and D terminals. If an optional
isolation barrier of the type described in Annex J of IEEE Std 1394–1995
is implemented between the PDI1394P24 and LLC, the ISO terminal
should be tied low to enable the differentiation logic. If no isolation barrier
is implemented (direct connection), or bus holder isolation is
implemented, the ISO
differentiation logic.
active/power status of the link layer controller and to control the state of
the PHY -LLC interface. This terminal should be connected to either the
VDD supplying the LLC through a 10 kΩ resistor, or to a pulsed output
which is active when the LLC is powered. A pulsed signal should be
used when an isolation barrier exists between the LLC and PHY. (See
Figure 8)
The LPS input is considered inactive if it is sampled low by the PHY for
more than 2.6 µs (128 SYSCLK cycles), and is considered active
otherwise (i.e., asserted steady high or an oscillating signal with a low
time less than 2.6 µs). The LPS input must be high for at least 21 ns in
order to be guaranteed to be observed as high by the PHY.
When the PDI1394P24 detects that LPS is inactive, it will place the
PHY -LLC interface into a low-power reset state. In the reset state, the
CTL and D outputs are held in the logic zero state and the LREQ input is
ignored; however, the SYSCLK output remains active. If the LPS input
remains low for more than 26 µs (1280 SYSCLK cycles), the PHY-LLC
interface is put into a low-power disabled state in which the SYSCLK
output is also held inactive. The PHY -LLC interface is placed into the
disabled state upon hardware reset.
The LLC is considered active only if both the LPS input is active and the
LCtrl register bit is set to 1, and is considered inactive if either the LPS
input is inactive or the LCtrl register bit is cleared to 0.
to the PDI1394P24. Bus holder is built into this terminal.
the default value of the power class indicated during self-ID.
Programming is done by tying the terminals high or low. Refer to
Table 21 for encoding.
circuitry except the cable-active monitor circuits which control the CNA
output. For more information, refer to Section 17.2
the low impedance circuit board ground plane.
capacitors near each terminal are suggested, such as paralleled 0.1 µF
and 0.001 µF. These supply terminals are separated from DVDD and
AVDD internal to the device to provide noise isolation. They should be
tied at a low impedance point on the circuit board.
an external resistance to set the internal operating currents and
cable driver output currents. A resistance of 2.49 kΩ ±1% is required to
meet the IEEE Std 1394–1995 output voltage limits.
and AVDD internal to the device to provide noise
DD
terminal should be tied high to disable the
2001 Sep 06
5
Philips Semiconductors Objective data
matched and as short as possible to the external load resistors and to
matched and as short as possible to the external load resistors and to
PDI1394P242-port 400 Mbps physical layer interface
Name DescriptionI/OPin NumbersPin Type
RESET CMOS 5V tol 61 I Logic reset input. Asserting this terminal low resets the internal logic. An
SYSCLK CMOS 63 O System clock output. Provides a 49.152 MHz clock signal, synchronized
TEST0 CMOS 29 I Test control input. This input is used in manufacturing tests of the
TEST1 CMOS 28 I Test control input. This input is used in manufacturing tests of the
TPA0+,
TPA1+
TPA0–,
TPA1–
TPB0+,
TPB1+
TPB0–,
TPB1–
TPBIAS0,
TPBIAS1
XO, XI Crystal 60, 59 — Crystal oscillator inputs. These terminals connect to a 24.576 MHz
Cable 36, 41 I/O
Cable 35, 40 I/O
Cable 34, 39 I/O
Cable 33, 38 I/O
Cable 37, 42 I/O Twisted-pair bias output. This provides the 1.86V nominal bias voltage
internal pull-up resistor to VDD is provided so only an external
delay capacitor is required for proper power-up operation. For more
information, refer to Section 17.2. This input is otherwise a standard
Schmitt logic input, and can also be driven by an open-drain type driver.
with data transfers, to the LLC.
PDI1394P24. For normal use, this terminal should be tied to GND.
PDI1394P24. For normal use, this terminal should be tied to GND.
Twisted-pair cable A differential signal terminals. Board traces from each
pair of positive and negative differential signal terminals should be kept
p
the cable connector. TPA+ and TPA– can be left unconnected on an
unused port.
Twisted-pair cable B differential signal terminals. Board traces from each
pair of positive and negative differential signal terminals should be kept
p
the cable connector. TPB+ and TPB– should be tied together and pulled
to ground on an unused port.
needed for proper operation of the twisted-pair cable drivers and
receivers, and for signaling to the remote nodes that there is an active
cable connection. Each of these terminals must be decoupled with a
0.3 µF–1 µF capacitor to ground. TPBIAS can be left unconnected on an
unused port.
parallel resonant fundamental mode crystal. The optimum values for the
external shunt capacitors are dependent on the specifications of the
crystal used. Can also be driven by an external clock generator (leave
XO unconnected in this case and start supplying the external clock
before resetting the PDI1394P24). For more information, refer to
Section 17.5.
2001 Sep 06
6
Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
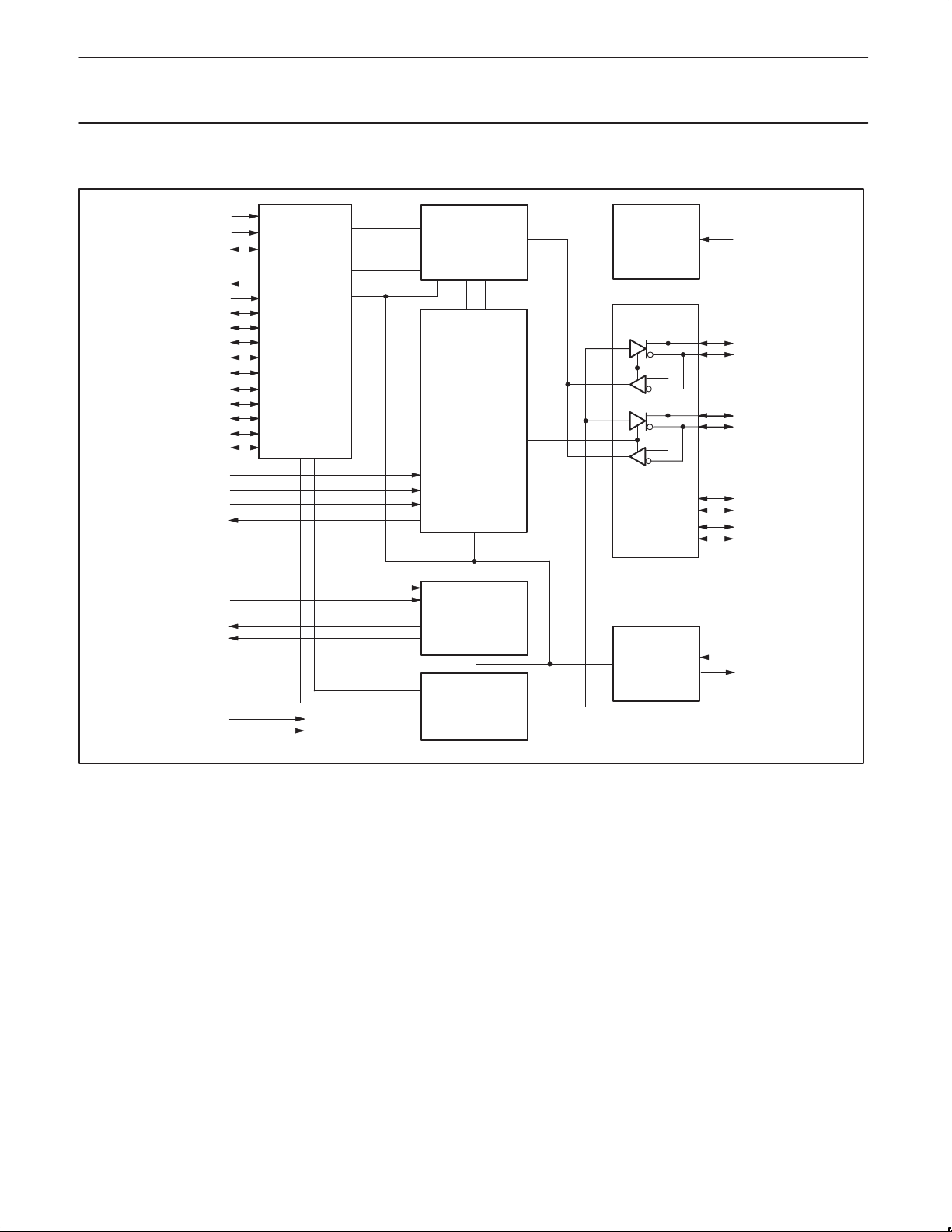
6.0 BLOCK DIAGRAM
LPS
/ISO
C/LKON
SYSCLK
LREQ
CTL0
CTL1
PC0
PC1
PC2
CNA
TPBIAS0
TPBIAS1
PD
/RESET
RECEIVED DATA
DECODER/
RETIMER
LINK
D0
D1
D2
D3
D4
D5
D6
D7
R0
R1
INTERFACE
I/O
ARBITRATION
AND CONTROL
STATE MACHINE
LOGIC
BIAS VOLTAGE
AND
CURRENT
GENERATOR
TRANSMIT
DATA
ENCODER
CABLE POWER
DETECTOR
CABLE PORT 0
CABLE PORT 1
CRYSTAL
OSCILLATOR,
PLL SYSTEM,
AND CLOCK
GENERATOR
CPS
TPA0+
TPA0–
TPB0+
TPB0–
TPA1+
TPA1–
TPB1+
TPB1–
XI
XO
SV01824
2001 Sep 06
7

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
7.0 FUNCTIONAL SPECIFICA TION
The PDI1394P24 requires only an external 24.576 MHz crystal as a
reference. An external clock can be connected to XI instead of a
crystal. An internal oscillator drives an internal phase-locked loop
(PLL), which generates the required 393.216 MHz reference signal.
This reference signal is internally divided to provide the clock signals
used to control transmission of the outbound encoded Strobe and
Data information. A 49.152 MHz clock signal, supplied to the
associated LLC for synchronization of the two chips, is used for
resynchronization of the received data. The Power Down (PD)
function, when enabled by asserting the PD terminal high, stops
operation of the PLL and disables all circuits except the cable bias
detectors at the TPB terminals. The port transmitter circuitry and the
receiver circuitry are also disabled when the port is disabled,
suspended, or disconnected.
The PDI1394P24 supports an optional isolation barrier between
itself and its LLC. When the ISO
LLC interface outputs behave normally. When the ISO
tied low, internal differentiating logic is enabled, and the outputs are
driven such that they can be coupled through a capacitive or
transformer galvanic isolation barrier as described in
section 5.9.4
the ISO
using single capacitor isolation, please refer to the Philips Isolation
Application Note AN2452.
Data bits to be transmitted through the cable ports are received from
the LLC on two, four or eight parallel paths (depending on the
requested transmission speed). They are latched internally in the
PDI1394P24 in synchronization with the 49.152 MHz system clock.
These bits are combined serially, encoded, and transmitted at
98.304/196.608/393.216 Mbps (referred to as S100, S200, and
S400 speed, respectively) as the outbound data-strobe information
stream. During transmission, the encoded data information is
transmitted differentially on the TPB cable pair(s), and the encoded
strobe information is transmitted differentially on the TP A cable
pair(s).
During packet reception the TPA and TPB transmitters of the
receiving cable port are disabled, and the receivers for that port are
enabled. The encoded data information is received on the TPA cable
pair, and the encoded strobe information is received on the TPB
cable pair. The received data-strobe information is decoded to
recover the receive clock signal and the serial data bits. The serial
data bits are split into two-, four- or eight-bit parallel streams
(depending upon the indicated receive speed), resynchronized to
the local 49.152 MHz system clock and sent to the associated LLC.
The received data is also transmitted (repeated) on the other active
(connected) cable ports.
Both the TPA and TPB cable interfaces incorporate dif ferential
comparators to monitor the line states during initialization and
arbitration. The outputs of these comparators are used by the
internal logic to determine the arbitration status. The TPA channel
monitors the incoming cable common-mode voltage. The value of
this common-mode voltage is used during arbitration to set the
speed of the next packet transmission (speed signaling). In addition,
the TPB channel monitors the incoming cable common-mode
voltage on the TPB pair for the presence of the remotely supplied
twisted-pair bias voltage (cable bias detection).
The PDI1394P24 provides a 1.86 V nominal bias voltage at the
TPBIAS terminal for port termination. The PHY contains two
independent TPBIAS circuits. This bias voltage, when seen through
a cable by a remote receiver, indicates the presence of an active
. To operate with single capacitor (bus holder) isolation,
on the PHY terminal must be tied high. For more details on
input terminal is tied high, the
terminal is
IEEE 1394a
connection. This bias voltage source must be stabilized by an
external filter capacitor of 0.3 µF–1 µF.
The line drivers in the PDI1394P24 operate in a high-impedance
current mode, and are designed to work with external 112 Ω
line-termination resistor networks in order to match the 110 Ω cable
impedance. One network is provided at each end of all twisted-pair
cable connections. Each network is composed of a pair of
series-connected 56 Ω resistors. The midpoint of the pair of resistors
that is directly connected to the twisted-pair A terminals is connected
to its corresponding TPBIAS voltage terminal. The midpoint of the pair
of resistors that is directly connected to the twisted-pair B terminals is
coupled to ground through a parallel R-C network with recommended
values of 5 kΩ and 220 pF. The values of the external line termination
resistors are designed to meet the standard specifications when
connected in parallel with the internal receiver circuits. An external
resistor connected between the R0 and R1 terminals sets the driver
output current, along with other internal operating currents. This
current setting resistor has a value of 2.49 kΩ ±1%.
When the power supply of the PDI1394P24 is removed while the
twisted-pair cables are connected, the PDI1394P24 transmitter and
receiver circuitry presents a high impedance to the cable in order to
not load the TPBIAS voltage on the other end of the cable.
When the PDI1394P24 is used with one or more of the ports not
brought out to a connector, the twisted-pair terminals of the unused
ports must be terminated for reliable operation. For each unused
port, the TPB+ and TPB– terminals can be tied together and then
pulled to ground, or the TPB+ and TPB– terminals can be connected
to the suggested termination network. The TPA+ and TPA– and
TPBIAS terminals of an unused port can be left unconnected.
The TEST0 and TEST1 terminals are used to set up various
manufacturing test conditions. For normal operation, the TEST0 and
TEST1 terminals should be connected to ground. TEST1 can also
be tied through a 1 kW resistor to ground.
Four package terminals, used as inputs to set the default value for
four configuration status bits in the self-ID packet, should be
hard-wired high or low as a function of the equipment design. The
PC0–PC2 terminals are used to indicate the default power-class
status for the node (the need for power from the cable or the ability
to supply power to the cable). See Table 21 for power class
encoding. The C/LKON terminal is used as an input to indicate that
the node is a contender for bus manager.
The PHY supports suspend/resume as defined in the IEEE 1394a
specification. The suspend mechanism allows pairs of directly
connected ports to be placed into a low power state while
maintaining a port-to-port connection between 1394 bus segments.
While in a low power state, a port is unable to transmit or receive
data transaction packets. However, a port in a low power state is
capable of detecting connection status changes and detecting
incoming TPBIAS. When all two ports of the PDI1394P24 are
suspended, all circuits except the bias-detection circuits are
powered down, resulting in significant power savings. The TPBIAS
circuit monitors the value of incoming TPA pair common-mode
voltage when local TPBIAS is inactive. Because this circuit has an
internal current source and the connected node has a current sink,
the monitored value indicates the cable connection status. This
monitor is called connect-detect.
2001 Sep 06
8
Philips Semiconductors Objective data
SYMBOL
PARAMETER
CONDITION
UNIT
Electrostatic discharge
PDI1394P242-port 400 Mbps physical layer interface
Both the cable bias-detect monitor and TPBIAS connect-detect
monitor are used in suspend/resume signaling and cable connection
detection. For additional details of suspend/resume operation, refer
to the 1394a specification. The use of suspend/resume is
recommended for new designs.
The port transmitter and receiver circuitry is disabled during power
down (when the PD input terminal is asserted high), during reset
(when the RESET
cable is connected to the port, or when controlled by the internal
arbitration logic. The port twisted-pair bias voltage circuitry is
disabled during power down, during reset, or when the port is
disabled as commanded by the LLC.
The CNA (cable-not-active) terminal provides a high when there are
no twisted-pair cable ports receiving incoming bias (i.e., they are
either disconnected or suspended), and can be used along with LPS
to determine when to power-down the PDI1394P24. The CNA
output is not debounced. When the PD terminal is asserted high, the
CNA detection circuitry is enabled (regardless of the previous state
of the ports) and a pull-down is activated on the RESET
as to force a reset of the PDI1394P24 internal logic.
The LPS (link power status) terminal works with the C/LKON
terminal to manage the power usage in the node. The LPS signal
from the LLC is used in conjunction with the LCtrl bit (see Table 1
and Table 2) to indicate the active/power status of the LLC. The LPS
signal is also used to reset, disable, and initialize the PHY -LLC
interface (the state of the PHY -LCC interface is controlled solely by
the LPS input regardless of the state of the LCtrl bit).
input terminal is asserted low), when no active
terminal so
The LPS input is considered inactive if it remains low for more than
2.6
µs and is considered active otherwise. When the PDI1394P24
detects that LPS is inactive, it will place the PHY -LLC interface into a
low-power reset state in which the CTL and D outputs are held in the
logic zero state and the LREQ input is ignored; however, the
SYSCLK output remains active. If the LPS input remains low for
more than 26 µs, the PHY-LLC interface is put into a low-power
disabled state in which the SYSCLK output is also held inactive. The
PHY -LLC interface is also held in the disabled state during hardware
reset. The PDI1394P24 will continue the necessary repeater
functions required for normal network operation regardless of the
state of the PHY -LLC interface. When the interface is in the reset or
disabled state and LPS is again observed active, the PHY will
initialize the interface and return it to normal operation.
The PHY uses the C/LKON terminal to notify the LLC to power up
and become active. When activated, the C/LKON signal is a square
wave of approximately 163 ns period. The PHY activates the
C/LKON output when the LLC is inactive and a wake-up event
occurs. The LLC is considered inactive when either the LPS input is
inactive, as described above, or the LCtrI bit is cleared to 0. A
wake-up event occurs when a link-on PHY packet addressed to this
node is received, or conditionally when a PHY interrupt occurs. The
PHY deasserts the C/LKON output when the LLC becomes active
(both LPS active and the LCtrl bit set to 1). The PHY also deasserts
the C/LKON output when a bus-reset occurs unless a PHY interrupt
condition exists which would otherwise cause C/LKON to be active.
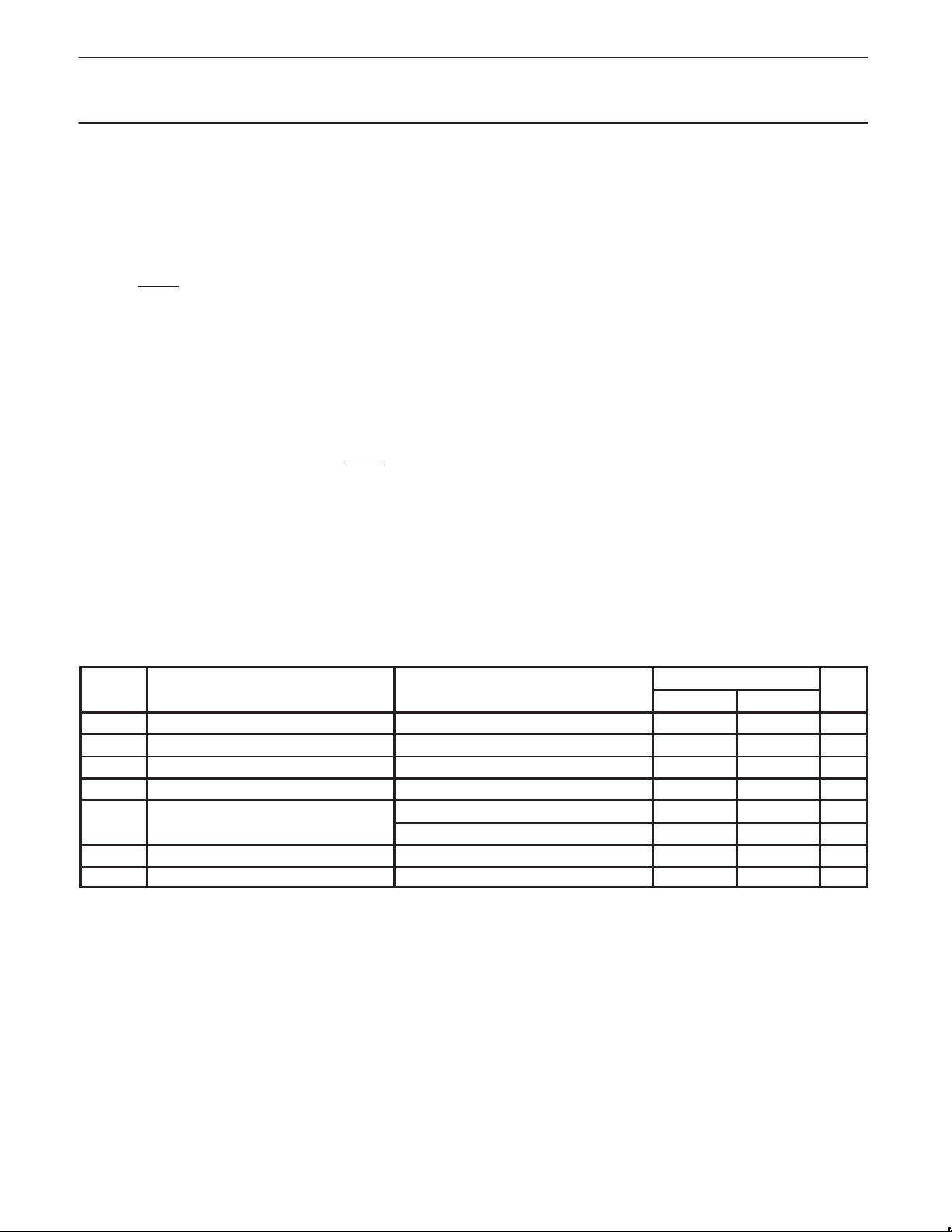
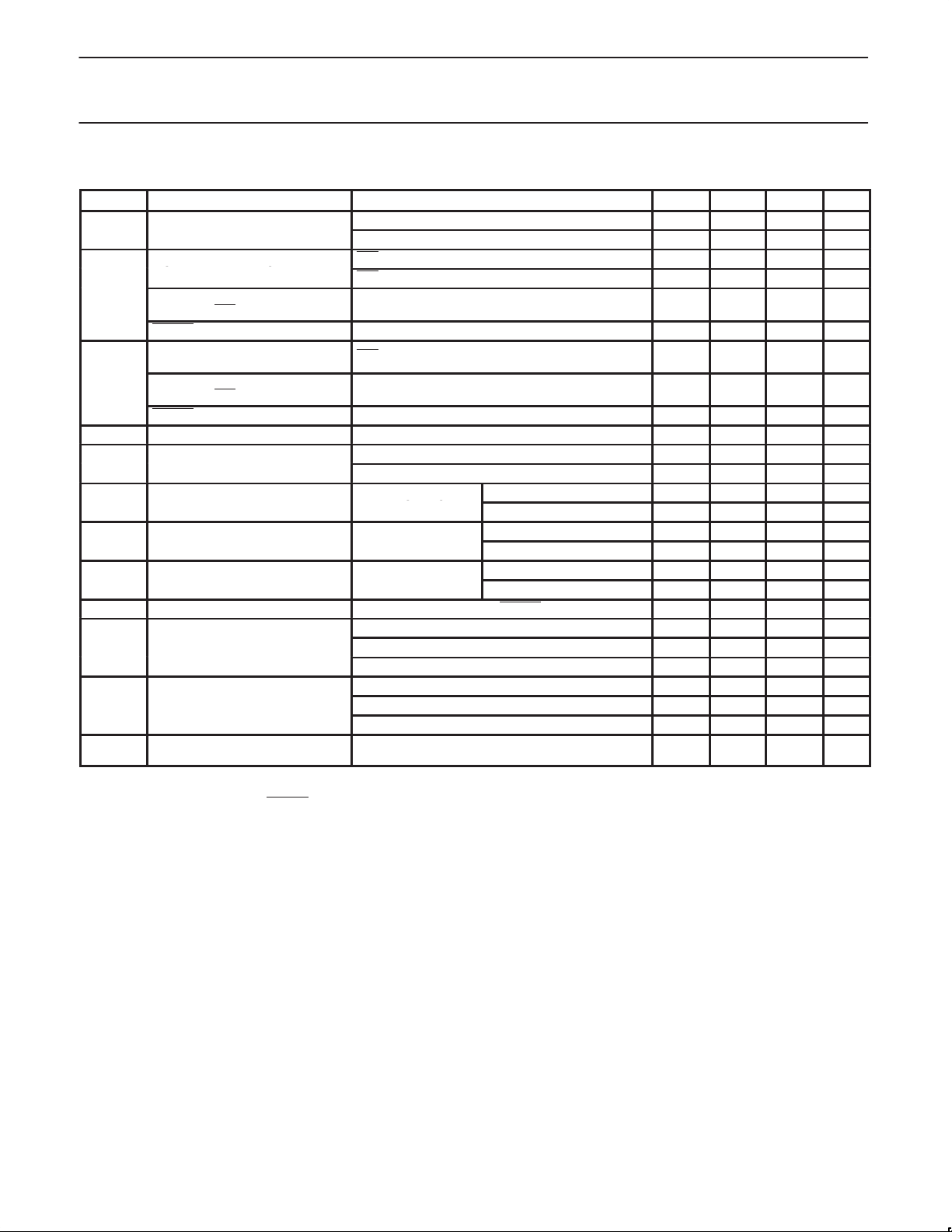
8.0 ABSOLUTE MAXIMUM RATINGS
In accordance with the Absolute Maximum Rating System (IEC 134). Voltages are referenced to GND (ground = 0 V).
V
VI–5V 5 volt tolerant input voltage range –0.5 5.5 V
V
T
amb
T
NOTE:
1. Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings
only, and functional operation of the device at these or any other conditions beyond those indicated under “Recommended Operating
Conditions” is not implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability .
DC supply voltage –0.5 4.0 V
DD
V
DC input voltage –0.5 VDD+0.5 V
I
DC output voltage range at any output –0.5 VDD+0.5 V
O
Operating free-air temperature range 0 +70 °C
Storage temperature range –65 +150 °C
stg
1
LIMITS
MIN MAX
Human Body Model — 2 kV
Machine Model — 200 V
2001 Sep 06
9
Philips Semiconductors Objective data
SYMBOL
PARAMETER
CONDITION
MIN
TYP
MAX
UNIT
VDDSu ly voltage
gg
VIDDifferential in ut voltage am litude
V
TPB common-mode in ut voltage
gg
V
TPB common-mode in ut voltage
S200 s eed signal
V
TPB common-mode in ut voltage
S400 s eed signal
PDI1394P242-port 400 Mbps physical layer interface
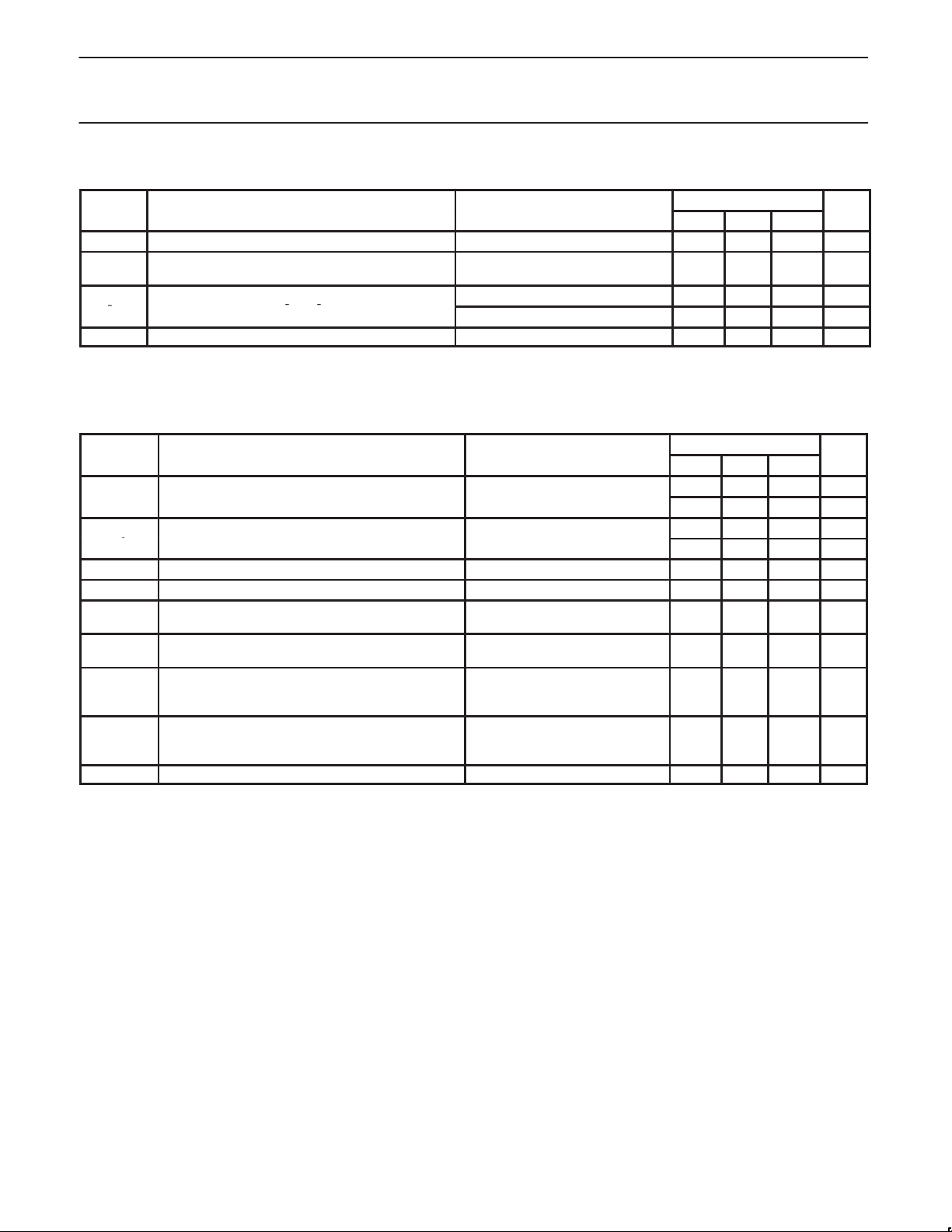
9.0 RECOMMENDED OPERATING CONDITIONS
pp
High-level input voltage, LREQ,
CTL0, CTL1, D0-D7
V
IH
High-level input voltage, C/LKON2,
Source power node 3.0 3.3 3.6 V
Non-source power node 2.7
ISO = VDD, VDD >= 2.7 V 2.3 — — V
ISO = VDD, VDD >= 3.0 V 2.6 — 5.5 V
PC0–PC2, ISO, PD
RESET 0.6 V
Low-level input voltage, LREQ,
CTL0, CTL1, D0–D7
V
Low-level input voltage, C/LKON2,
IL
PC0–PC2, ISO, PD,
ISO = V
DD
RESET — — 0.3 V
I
Output current TPBIAS outputs –6 — 2.5 mA
O
TPA, TPB cable inputs, during data reception 118 — 260 mV
TPA, TPB cable inputs, during data arbitration 168 — 265 mV
Speed signaling off
or S100 speed signal
p
p
Source power node 1.165 — 2.515 V
Non-source power node 1.165 — 2.015
Source power node 0.935 — 2.515 V
Non-source power node 0.935 — 2.015
Source power node 0.523 — 2.515 V
Non-source power node 0.523 — 2.015
IC-100
IC-200
IC-400
t
PU
p
p
p
p
p
Power–up reset time Set by capacitor between RESET pin and GND 2 — — ms
TPA, TPB cable inputs, S100 operation — — 1.08 ns
Receive input jitter
TPA, TPB cable inputs, S200 operation — — 0.5 ns
TPA, TPB cable inputs, S400 operation — — 0.315 ns
Between TPA and TPB cable inputs, S100 operation — — 0.8 ns
Receive input skew
Between TPA and TPB cable inputs, S200 operation — — 0.55 ns
Between TPA and TPB cable inputs, S400 operation — — 0.5 ns
f
XTAL
Crystal or external clock frequency
Crystal connected according to Figure 10 or external
clock input at pin XI
NOTES:
1. For a node that does not source power to the bus (see Section 4.2.2.2 in the IEEE 1394-1995 standard).
2. C/LKON is only an input when RESET
= 0.
1
3.0 3.6 V
0.7 V
— — V
DD
— —
DD
— — 0.7 V
— — 0.2 V
DD
DD
V
—
1
V
1
V
1
V
24.5735 24.576 24.5785 MHz
2001 Sep 06
10
Philips Semiconductors Objective data
SYMBOL
PARAMETER
TEST CONDITION
UNIT
I
gg , ,
SYMBOL
PARAMETER
TEST CONDITION
UNIT
ZIDDifferential input impedance
Drivers disabled
ZICCommon mode input impedance
Drivers disabled
PDI1394P242-port 400 Mbps physical layer interface
10.0 CABLE DRIVER
LIMITS
MIN TYP MAX
V
I
O(diff)
V
OFF
NOTES:
1. Limits defined as algebraic sum of TPA+ and TPA– driver currents. Limits also apply to TPB+ and TPB– algebraic sum of driver currents.
2. Limits defined as one half of the algebraic sum of currents flowing out of TPB+ and TPB–.
11.0 CABLE RECEIVER
V
V
V
V
V
TH–SP200
V
TH–SP400
Differential output voltage 56 Ω load 172 — 265 mV
OD
Drivers enabled,
Driver Difference current, TP A+, TPA–, TPB+, TPB–
Common mode speed signaling output current, TPB+,
TPB–
2
SP
1
speed signaling OFF
–0.88 — 0.88 mA
200 Mbps speed signaling enabled –4.84 — –2.53 mA
400 Mbps speed signaling enabled –12.4 — –8.10 mA
OFF state differential voltage Drivers disabled — — 20 mV
LIMITS
MIN TYP MAX
10 14 —
— — 4 pF
20 — — kΩ
— — 24 pF
TH-R
TH-CB
TH+
TH–
p
p
p
p
Receiver input threshold voltage Drivers disabled –30 — 30 mV
Cable bias detect threshold, TPBn cable inputs Drivers disabled 0.6 — 1.0 V
Positive arbitration comparator input threshold
voltage
Negative arbitration comparator input threshold
voltage
Drivers disabled 89 — 168 mV
Drivers disabled –168 — –89 mV
TPBIAS–TPA common mode
Speed signal input threshold
voltage, drivers disabled 200
49 — 131 mV
Mbps
TPBIAS–TPA common mode
Speed signal input threshold
voltage, drivers disabled 400
314 — 396 mV
Mbps
I
CD
Connect detect output at TPBIAS pins Drivers disabled — — –76 µA
kΩ
2001 Sep 06
11
Philips Semiconductors Objective data
High level out ut voltage. ins CTL0
C/LKON
V
CTL1, D0–D7, CNA, C/LKON
PDI1394P242-port 400 Mbps physical layer interface
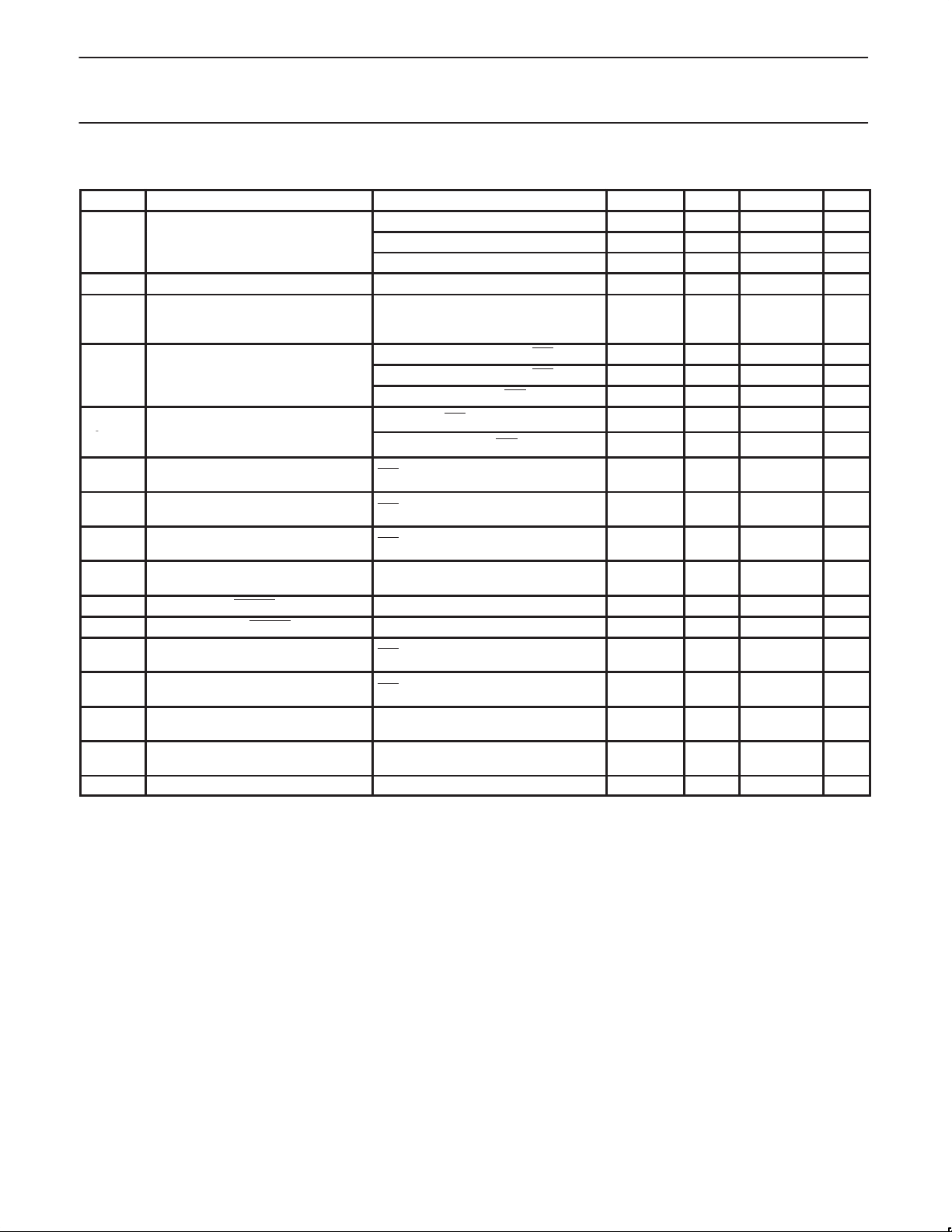
12.0 OTHER DEVICE I/O
SYMBOL PARAMETER TEST CONDITION MIN TYP MAX UNIT
See Note 1 — TBD — mA
I
DD
I
DD–PD
V
TH
V
OH
Supply current
Supply current in power down mode PD = VDD in power down mode — TBD — µA
Cable power status threshold voltage
-
p
p
CTL1, D0–D7, SYSCLK, CNA,
Low-level output voltage, pins CTL0,
OL
I
BH+
I
BH–
I
I
I
OZ
I
RST-UP
I
RST-DN
V
IT+
V
IT–
V
LIT+
V
LIT–
V
O
SYSCLK
Positive peak bus holder current, pins
CTL0, CTL1, D0–D7, LREQ
Negative peak bus holder current, pins
CTL0, CTL1, D0–D7, LREQ
Input current, pins LREQ, LPS, PD,
TEST0, TEST1, PC0–PC2
Off-state current, pins CTL0, CTL1,
D0–D7, C/LKON
Pullup current, RESET input VI = 1.5 V or 0 V –90 — –20 µA
Pulldown current, RESET input VI = VDD, PD = V
Positive going threshold voltage, LREQ,
CTL0, CTL1, D0–D7, C/LKON inputs
Negative going threshold voltage, LREQ,
CTL0, CTL1, D0–D7, C/LKON inputs
Positive going threshold voltage, LPS
inputs
Negative going threshold voltage, LPS
inputs
TPBIAS output voltage At rated IO current 1.665 — 2.015 V
,
NOTES:
1. Transmit Max Packet (2 ports transmitting max size isochronous packet (4096 bytes), sent on every isochronous interval, S400, data value
of 0xCCCCCCCCh), V
2. Repeat typical packet (1 port receiving DV packets on every isochronous interval, 1 port repeating the packet, S100), V
= 3.3 V, TA = 25°C
DD
TA = 25°C
3. Idle (receive cycle start on one port, transmit cycle start on other port) V
See Note 2 — TBD — mA
See Note 3 — TBD — mA
390 kΩ resistor between cable power
and CPS pin: Measured at cable power
4.7 — 7.5 V
side of resistor
VDD >= 2.7 V, IOH = –4 mA, ISO = V
,
VDD >= 3.0 V, IOH = –4 mA, ISO = V
DD
DD
2.4 — — V
2.8 — — V
Annex J: IOH = –9 mA, ISO = 0 VDD–0.4 — — V
IOL = 4 mA, ISO = V
DD
— — 0.4 V
Annex J: IOL = 9 mA, ISO = 0 — — 0.4 V
ISO = VDD, VI = 0 V to V
ISO = VDD, VI = 0 V to V
DD
DD
0.05 — 1.0 mA
–1.0 — –0.05 mA
ISO = 0 V; VDD = 3.6 V — — 5 µA
VO = VDD or 0 V –5 — 5 µA
DD
.4 1.6 2.8 mA
ISO = 0 V VDD/2 + 0.3 — VDD/2 + 0.9 V
ISO = 0 V VDD/2 – 0.9 — VDD/2 – 0.3 V
V
V
LREF
LREF
= 0.24 × V
= 0.24 × V
DD
DD
= 3.3 V, TA = 25°C
DD
— — V
V
+0.2 — — V
LREF
LREF
= 3.3 V,
DD
+1 V
2001 Sep 06
12

Philips Semiconductors Objective data
SYMBOL
PARAMETER
TEST CONDITION
UNIT
PDI1394P242-port 400 Mbps physical layer interface
13.0 THERMAL CHARACTERISTICS
LIMITS
MIN TYP MAX
RΘjA Junction-to-free-air thermal resistance Board mounted, no air flow — 68 — °C/W
14.0 AC CHARACTERISTICS
SYMBOL PARAMETER CONDITION MIN TYP MAX UNIT
Transmit jitter TPA, TPB — — 0.15 ns
Transmit skew Between TPA and TPB — — 0.10 ns
t
TPA, TPB differential output voltage rise time 10% to 90%; At 1394 connector 0.5 — 1.2 ns
r
t
TPA, TPB differential output voltage fall time 90% to 10%; At 1394 connector 0.5 — 1.2 ns
f
t
C
Setup time, CTL0, CTL1, D0–D7, LREQ to SYSCLK 50% to 50%; See Figure 2 5 — — ns
SU
t
Hold time, CTL0, CTL1, D0–D7, LREQ after SYSCLK 50% to 50%; See Figure 2 0 — — ns
H
t
Delay time SYSCLK to CTL0, CTL1, D0–D7 50% to 50%; See Figure 3 0.5 — 11 ns
D
Capacitance load value CTL0, CTL1, D0–D7, SYSCLK — 10 — pF
L
C
Input capacitance CTL0, CTL1, D0–D7, LREQ — 3.3 — pF
i
15.0 TIMING WAVEFORMS
TPAn+
TPBn+
56 Ω
TPAn–
TPBn–
SV01098
Figure 1. Test load diagram
SYSCLK
t
SU
Dn, CTLn, LREQ
Figure 2. Dn, CTLn, LREQ input setup and hold times
t
H
SV01099
SYSCLK
t
D
Dn, CTLn
SV01803
Figure 3. Dn, CTLn, output delay relative to SYSCLK
2001 Sep 06
13

Philips Semiconductors Objective data
ADDRESS
PDI1394P242-port 400 Mbps physical layer interface
16.0 INTERNAL REGISTER CONFIGURATION
There are 16 accessible internal registers in the PDI1394P24. The
configuration of the registers at addresses 0 through 7 (the base
registers) is fixed, while the configuration of the registers at
addresses 8h through Fh (the paged registers) is dependent upon
which one of eight pages, numbered 0h through 7h, is currently
selected. The selected page is set in base register 7h.
Table 1. Base Register Configuration
0 1 2 3 4 5 6 7
0000 Physical ID R CPS
0001 RHB IBR Gap_Count
0010 Extended (11 1b) Rsvd Num_Ports (0010b)
0011 PHY_Speed (010b) Rsvd Delay (0000b)
0100 LCtrl C Jitter (000) Pwr_Class
0101 RPIE ISBR CTOI CPSI STOI PEI EAA EMC
0110 Reserved
0111 Page_Select Rsvd Port Select
The configuration of the base registers is shown in Table 1, and
corresponding field descriptions are given in Table 2. The base
register field definitions are unaffected by the selected page number.
A reserved register or register field (marked as Reserved or Rsvd in
the following register configuration tables) is read as 0, but is subject
to future usage. All registers in address pages 2 through 6 are
reserved.
BIT POSITION
Table 2. Base Register Field Descriptions
FIELD SIZE TYPE DESCRIPTION
Physical ID 6 Rd This field contains the physical address ID of this node determined during self-ID. The physical-ID is
R 1 Rd Root. This bit indicates that this node is the root node. The R bit is reset to 0 by bus reset, and is set to
CPS 1 Rd Cable-power-status. This bit indicates the state of the CPS input terminal. The CPS terminal is normally
RHB 1 Rd/Wr Root-holdoff bit. This bit instructs the PHY to attempt to become root after the next bus reset. The RHB
IBR 1 Rd/Wr Initiate bus reset. This bit instructs the PHY to initiate a long (166 µs) bus reset at the next opportunity.
Gap_Count 6 Rd/Wr Arbitration gap count. This value is used to set the subaction (fair) gap, arb-reset gap, and arb-delay
Extended 3 Rd Extended register definition. For the PDI1394P24, this field is 111b, indicating that the extended register
Num_Ports 4 Rd Number of ports. This field indicates the number of ports implemented in the PHY. For the PDI1394P24
PHY_Speed 3 Rd PHY speed capability. For the PDI1394P24, this field is 010b, indicating S400 speed capability.
Delay 4 Rd PHY repeater data delay. This field indicates the worst case repeater data delay for this PHY,
invalid after a bus reset until self-ID has completed as indicated by an unsolicited register-0 status
transfer.
1 during tree-ID if this node becomes root.
tied to serial bus cable power through a 390 kΩ resistor. A 0 in this bit indicates that the cable power
voltage has dropped below its threshold for ensured reliable operation.
bit is reset to 0 by a hardware reset, and is unaffected by a bus reset.
Any receive or transmit operation in progress when this bit is set will complete before the bus reset is
initiated. The IBR bit is reset to 0 after a hardware reset or a bus reset.
times. The gap count can be set either by a write to the register, or by reception or transmission of a
PHY_CONFIG packet. The gap count is reset to 3Fh by hardware reset or after two consecutive bus
resets without an intervening write to the gap count register (either by a write to the PHY register or by
a PHY_CONFIG packet).
set is implemented.
this field is 2.
expressed as 144+(delay × 20) ns. For the PDI1394P24, this field is 1.
2001 Sep 06
14

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
FIELD DESCRIPTIONTYPESIZE
LCtrl 1 Rd/Wr Link-active status control. This bit is used to control the active status of the LLC as indicated during
C 1 Rd/Wr Contender status. This bit indicates that this node is a contender for the bus or isochronous resource
Jitter 3 Rd PHY repeater jitter. This field indicates the worst case difference between the fastest and slowest
Pwr_Class 3 Rd/Wr Node power class. This field indicates this node’s power consumption and source characteristics and is
RPIE 1 Rd/Wr Resuming port interrupt enable. This bit, if set to 1, enables the port event interrupt (PEI) bit to be set
ISBR 1 Rd/Wr Initiate short arbitrated bus reset. This bit, if set to 1, instructs the PHY to initiate a short (1.3 µs)
CTOI 1 Rd/Wr Configuration time-out interrupt. This bit is set to 1 when the arbitration controller times-out during
CPSI 1 Rd/Wr Cable-power-status interrupt. This bit is set to 1 whenever the CPS input transitions from high to low
STOI 1 Rd/Wr State time-out interrupt. This bit indicates that a state time-out has occurred. This bit is reset to 0 by
PEI 1 Rd/Wr Port event interrupt. This bit is set to 1 on any change in the connected, bias, disabled, or fault bits for
EAA 1 Rd/Wr Enable arbitration acceleration. This bit enables the PHY to perform the various arbitration acceleration
EMC 1 Rd/Wr Enable multispeed concatenated packets. This bit enables the PHY to transmit concatenated packets of
Page_Select 3 Rd/Wr Page_Select. This field selects the register page to use when accessing register addresses 8 through
Port_Select 4 Rd/Wr Port_Select. This field selects the port when accessing per-port status or control (e.g., when one of the
self-ID. The logical AND of this bit and the LPS active status is replicated in the L field (bit 9) of the
self-ID packet. The LLC is considered active only if both the LPS input is active the and LCtrl bit is set.
The LCtrl bit provides a software controllable means to indicate the LLC active status in lieu of using the
LPS input.
The LCtrl bit is set to 1 by hardware reset and is unaffected by bus-reset.
NOTE: The state of the PHY-LLC interface is controlled solely by the LPS input, regardless of the state
of the LCtrl bit. If the PHY -LLC interface is operational as determined by the LPS input being active,
then received packets and status information will continue to be presented on the interface, and any
requests indicated on the LREQ input will be processed, even if the LCtrl bit is cleared to 0.
manager. This bit is replicated in the “c” field (bit 20) of the self-ID packet. This bit is set to the state
specified by the C/LKON input terminal by a hardware reset and is unaffected by a bus reset.
repeater data delay, expressed as (Jitter + 1) × 20 ns. For the PDI1394P24, this field is 0.
replicated in the pwr field (bits 21–23) of the self-ID packet. This field is reset to the state specified by
the PC0–PC2 input terminals upon hardware reset, and is unaffected by a bus reset. See Table 21.
whenever resume operations begin on any port. This bit is reset to 0 by hardware reset and is
unaffected by bus reset.
arbitrated bus reset at the next opportunity. This bit is reset to 0 by a bus reset.
NOTE: Legacy IEEE Std 1394–1995 compliant PHYs are not capable of performing short bus resets.
Therefore, initiation of a short bus reset in a network that contains such a legacy device results in a long
bus reset being performed.
tree-ID start, and may indicate that the bus is configured in a loop. This bit is reset to 0 by hardware
reset, or by writing a 1 to this register bit.
NOTE: If the network is configured in a loop, only those nodes which are part of the loop should
generate a configuration time out interrupt. All other nodes should instead time out waiting for the
tree-ID and/or self-ID process to complete and then generate a state time-out interrupt and bus-reset.
indicating that cable power may be too low for reliable operation. This bit is set to 1 by hardware reset,
and set to 0 by writing a 1 to this register bit.
hardware reset, or by writing a 1 to this register bit.
any port for which the port interrupt enable (PIE) bit is set. Additionally, if the resuming port interrupt
enable (RPIE) bit is set, the PEI bit is set to 1 at the start of resume operations on any port. This bit is
reset to 0 by hardware reset, or by writing a 1 to this register bit.
enhancements defined in P1394a (ACK-accelerated arbitration, asynchronous fly-by concatenation,
and isochronous fly-by concatenation). This bit is reset to 0 by hardware reset and is unaffected by bus
reset.
NOTE: The EAA bit should be set only if the attached LLC is P1394a compliant. If the LLC is not
P1394a compliant, use of the arbitration acceleration enhancements can interfere with isochronous
traffic by excessively delaying the transmission of cycle-start packets.
differing speeds in accordance with the protocols defined in P1394a. This bit is reset to 0 by hardware
reset and is unaffected by bus reset.
NOTE: The use of multispeed concatenation is completely compatible with networks containing legacy
IEEE Std 1394–1995 PHYs. However, use of multispeed concatenation requires that the attached LLC
be P1394a compliant.
15. This field is reset to 0 by a hardware reset and is unaffected by bus-reset.
port status/control registers is accessed in page 0). Ports are numbered starting at 0. This field is reset
to 0 by hardware reset and is unaffected by bus reset.
2001 Sep 06
15

Philips Semiconductors Objective data
ADDRESS
PDI1394P242-port 400 Mbps physical layer interface
The Port Status page provides access to configuration and status information for each of the ports. The port is selected by writing 0 to the
Page_Select field and the desired port number to the Port_Select field in base register 7. The configuration of the port status page registers is
shown in Table 3 and corresponding field descriptions given in T able 4. If the selected port is unimplemented, all registers in the port status page
are read as 0.
Table 3. Page 0 (Port Status) Register Configuration
BIT POSITION
0 1 2 3 4 5 6 7
1000 AStat BStat Ch Con Bias Dis
1001 Peer_Speed PIE Fault Reserved
1010 Reserved
1011 Reserved
1100 Reserved
1101 Reserved
1110 Reserved
1111 Reserved
Table 4. Page 0 (Port Status) Register Field Descriptions
FIELD SIZE TYPE DESCRIPTION
AStat 2 Rd TPA line state. This field indicates the TPA line state of the selected port, encoded as follows:
Code Arb Value
11 Z
01 1
10 0
00 invalid
BStat 2 Rd TPB line state. This field indicates the TPB line state of the selected port. This field has the same
Ch 1 Rd Child/parent status. A 1 indicates that the selected port is a child port. A 0 indicates that the selected
Con 1 Rd Debounced port connection status. This bit indicates that the selected port is connected. The
Bias 1 Rd Debounced incoming cable bias status. A 1 indicates that the selected port is detecting incoming cable
Dis 1 Rd/Wr Port disabled control. If 1, the selected port is disabled. The Dis bit is reset to 0 by hardware reset (all
Peer_Speed 3 Rd Port peer speed. This field indicates the highest speed capability of the peer PHY connected to the
PIE 1 Rd/Wr Port event interrupt enable. When set to 1, a port event on the selected port will set the port event
Fault 1 Rd/Wr Fault. This bit indicates that a resume-fault or suspend-fault has occurred on the selected port, and that
encoding as the ASTAT field.
port is the parent port. A disconnected, disabled, or suspended port is reported as a child port. The Ch
bit is invalid after a bus-reset until tree-ID has completed.
connection must be stable for the debounce time of 330ms–350ms for the Con bit to be set to 1. The
Con bit is reset to 0 by hardware reset and is unaffected by bus reset.
NOTE: The Con bit indicates that the port is physically connected to a peer PHY, but the port is not
necessarily active.
bias. The incoming cable bias must be stable for the debounce time of 41.6µs–52µs for the Bias bit to
be set to 1.
ports are enabled for normal operation following hardware reset). The Dis bit is not affected by bus
reset.
selected port, encoded as follows:
Code Peer Speed
000 S100
001 S200
010 S400
011–11 1 invalid
The Peer_Speed field is invalid after a bus reset until self-ID has completed.
NOTE: Peer speed codes higher than 010b (S400) are defined in P1394a. However, the PDI1394P24
is only capable of detecting peer speeds up to S400.
interrupt (PEI) bit and notify the link. this bit is reset to 0 by a hardware reset, and is unaffected by
bus-reset.
the port is in the suspended state. A resume-fault occurs when a resuming port fails to detect incoming
cable bias from its attached peer. A suspend-fault occurs when a suspending port continues to detect
incoming cable bias from its attached peer. Writing 1 to this bit clears the fault bit to 0. This bit is reset to
0 by hardware reset and is unaffected by bus reset.
2001 Sep 06
16

Philips Semiconductors Objective data
ADDRESS
ADDRESS
PDI1394P242-port 400 Mbps physical layer interface
The Vendor Identification page is used to identify the vendor/manufacturer and compliance level. The page is selected by writing 1 to the
Page_Select field in base register 7. The configuration of the Vendor Identification page is shown in Table 5, and corresponding field
descriptions are given in Table 6.
Table 5. Page 1 (Vendor ID) Register Configuration
BIT POSITION
0 1 2 3 4 5 6 7
1000 Compliance
1001 Reserved
1010 Vendor_ID[0]
1011 Vendor_ID[1]
1100 Vendor_ID[2]
1101 Product_ID[0]
1110 Product_ID[1]
1111 Product_ID[2]
Table 6. Page 1 (Vendor ID) Register Field Descriptions
FIELD SIZE TYPE DESCRIPTION
Compliance 8 Rd Compliance level. For the PDI1394P24, this field is 01h, indicating compliance with the P1394a
Vendor_ID 24 Rd Manufacturer’s organizationally unique identifier (OUI). For the PDI1394P24, this field is 00_60_37h
Product_ID 24 Rd Product identifier. For the PDI1394P24, this field is 42_39_x0h (the MSB is at register address 1101b).
specification.
(Philips Semiconductors) (the MSB is at register address 1010b).
The Vendor-Dependent page provides access to the special control features of the PDI1394P24, as well as configuration and status information
used in manufacturing test and debug. This page is selected by writing 7 to the Page Select field in base register 7. The configuration of the
Vendor-Dependent page is shown in Table 7 and corresponding field descriptions given in Table 8.
Table 7. Page 7 (Vendor-Dependent) Register Field Descriptions
BIT POSITION
0 1 2 3 4 5 6 7
1000 Reserved Link_Speed
1001 Reserved for test
1010 Reserved for test
1011 Reserved for test
1100 Reserved for test
1101 Reserved for test
1110 Reserved for test
1111 Reserved for test
Table 8. Page 7 (Vendor-Dependent) Register Field Descriptions
FIELD SIZE TYPE DESCRIPTION
Link_Speed 2 Rd/Wr Link speed. This field indicates the top speed capability of the attached LLC. Encoding is as follows:
Code Speed
00 S100
01 S200
10 S400
11 illegal
This field is replicated in the “sp” field of the self-ID packet to indicate the speed capability of the node
(PHY and LLC in combination). However, this field does not affect the PHY speed capability indicated to
peer PHYs during self-ID; the PDI1394P24 PHY identifies itself as S400 capable to its peers regardless
of the value in this field. This field is set to 10b (S400) by hardware reset and is unaffected by bus-reset.
An 11b can be written into this field, however, a 10b will be sent in the self-ID packet.
2001 Sep 06
17

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
17.0 APPLICATION INFORMATION
PDI1394P24
CABLE PORT
CPS
TPBIAS
TPAn+
TPAn–
TPBn+
TPBn–
220pF
390KΩ
0.3–1.0 µF
56Ω56Ω
56Ω56Ω
5 kΩ
VP
VG
CABLE
POWER PAIR
CABLE
PAIR A
CABLE
PAIR B
OUTER SHIELD
TERMINATION
SV01825
The IEEE Std 1394–1995 calls for a 250 pF capacitor, which is a non-standard component value. A 220 pF capacitor is recommended.
Figure 4. Twisted pair cable interface connections
COMPLIANT DC-ISOLATED
OUTER SHIELD TERMINATION
OUTER CABLE SHIELD
0.1 µF0.01 µF1 MΩ
NON-ISOLATED
OUTER SHIELD TERMINATION
OUTER CABLE SHIELD
CHASSIS GROUND
Figure 5. Typical outer shield termination
3
DGND (AGND)
0.001 µF
0.1 µF
V
DD
6
(AVDD)
DV
DD
SV01805
Use one of these networks per side for all digital power and ground
pins and one per side for all analog power and ground pins. Place
the network as close to the PHY as possible.
Figure 6. Power supply decoupling network
CHASSIS GROUND
10 kΩ
LINK POWER
SQUARE WAVE INPUT
SV01748
LPS
LPS
10 kΩ
SV01806
Figure 7. Non-isolated connection variations for LPS
2001 Sep 06
18

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
PHY V
DD
24 kΩ
PHY CHIP
C/LKON
SQUARE WAVE SIGNAL
3.3nF
7.5 kΩ
LPS
LINK LAYER CHIP
CONTENDER/
LINKON
10 K
SV01819
Figure 8. Isolated circuit connection for LPS
10 K
LINK LAYER CHIP
LINKON
TIE TO LLCVDD (CONTENDER)
OR GND (NOT CONTENDER)
PHY CHIP
C/LKON
SV01873
Figure 9. Three configurations for C/LKON signal in a
non-isolated system
2001 Sep 06
19

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
17.1 External Component Connections
REFER TO SECTION 17.5
CONNECT RESET
AS THE LINK IC OR THROUGH
OPTOCOUPLER FOR GALVANIC ISOLATION.
USE 0.1 µF CAPACITOR TO GND ONLY IN
NON-LINK DESIGNS.
LINK PULSE
OR LINK V
AND FIGURE 8
TO THE SAME SOURCE
CNA OUT
DD
OR V
DD
REFER TO
FIGURE 7
DGND
1
LREQ
2
DGND
3
CTL0
4
CTL1
5
D0
6
D1
7
DVDD
8
D2
9
D3
10
D4
11
D5
12
D6
13
D7
14
DGND
15
CNA
16
LPS
DVDD
V
DD
12 pF12 pF
2.49 kΩ
PLLVDD
PLLGND
±1%
DGND
R1
R0
AGND
AGND
AVDD
24.576 MHz
62 61 60 59 58 57 56 55 5464 63 53 52 51 50 49
DVDD
RESET
SYSCLK
XO
0.1 µF
0.001 µF
XI
PDI1394P24
C/LKONPDPC0
19 20 21 22 23 24 25
PC1
PC2
ISO
ISO
CPS
DGND
26 2717 18
DVDD
DVDD
TEST1
28 29 30 31 32
TEST0
AVDD
AVDD
AVDD
AGND
TPBIAS1
TPBIAS0
AGND
NC
NC
NC
NC
NC
AVDD
TPA1+
TPA1–
TPB1+
TPB1–
TPA0+
TPA0–
TPB0+
TPB0–
48
47
46
45
44
43
42
41
TP CABLES INTERFACE
40
CONNECTION (REFER TO
FIGURES 4 AND 5)
39
38
37
36
35
TP CABLES INTERFACE
CONNECTION (REFER TO
34
FIGURES 4 AND 5)
33
0.3–1.0 µF
TPBIAS
0.3–1.0 µF
TPBIAS
POWER DOWN
(SEE FIGURE 9)
370–
410 kΩ
POWER CLASS
PROGRAMMING
See Figure 6 for recommended power and ground connections.
Figure 10. External Component Connections
2001 Sep 06
SV001826
CABLE POWER
20

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
17.2 RESET and Power Down
Forcing the RESET pin low resets the internal logic to the Reset
Start state and deactivates SYSCLK. Returning the RESET
causes a Bus Reset condition on the active cable ports. For
power-up (and after Power Down is asserted) RESET
asserted low for a minimum of 2 ms from the time that the PHY
power reaches the minimum required supply voltage. This is
required to assure proper PLL operation before the PHY begins
using the clock.
The PHY must come out of RESET
Link comes out of RESET
properly. To assure that this happens, it is recommended that the
same signal source originate LLC and PHY reset signals. If galvanic
isolation is used, an optocoupler should be used to drive the RESET
pin of the PHY. (See Philips AN2452 “IEEE 1394 bus node galvanic
isolation and power supply design”.) If galvanic isolation is not used,
the LCC and PHY reset pins should be connected directly together.
A single capacitor on the RESET
is recommended only in designs without an LLC device (i.e. repeater
designs).
An internal pull-up resistor is connected to V
delay capacitor is required. When using a passive capacitor on the
RESET
terminal to generate a power-on reset signal, the minimum
reset time will be assured if the capacitor has a minimum value of
0.1 µF and also satisfies the following equation:
C
= 0.0077 × T + 0.085
min
where C
µF, and T is the V
An alternative to the passive reset is to actively drive RESET low for
the minimum reset time following power on. This input is a standard
logic Schmitt buffer and may also be driven by an open drain logic
output buffer.
The RESET
activated by the Power Down pin. For a reset during normal
operation, a 10 µs low pulse on this pin will accomplish a full PHY
reset. This pulse, as well as the 2 ms power up reset pulse, could be
microprocessor controlled, in which case the external delay
capacitor would not be needed. For more details on using single
capacitor isolation with this pin, please refer to the Philips Isolation
Application Note AN2452
The Power Down input powers down all device functions with the
exception of the CNA circuit to conserve power in portable or
battery-powered applications. It must be held high for at least 2 ms
to assure a successful reset after power down.
is the minimum capacitance on the RESET terminal in
min
pin also has an internal n-channel pull-down transistor
so that the LLC/PHY handshake occurs
ramp time, 10%–90%, in ms.
DD
simultaneously or just after the
pin of the PHY as described below
, so only an external
DD
pin high
must be
17.3 Using the PDI1394P24 with a non-P1394a
link layer
The PDI1394P24 implements the PHY-LLC interface specified in the
P1394a Supplement. This interface is based upon the interface
described in informative Annex J of IEEE Std 1394-1995, which is the
interface used in older PHY devices. The PHY-LLC interface specified
in P1394a is completely compatible with the older Annex J interface.
The P1394a Supplement includes enhancements to the Annex J
interface that must be comprehended when using the PDI1394P24
with a non-P1394a LLC device.
•A new LLC service request was added which allows the LLC to
temporarily enable and disable asynchronous arbitration
accelerations. If the LLC does not implement this new service
request, the arbitration enhancements should not be enabled (see
the EAA bit in PHY register 5).
•The capability to perform multispeed concatenation (the
concatenation of packets of differing speeds) was added in order
to improve bus efficiency (primarily during isochronous
transmission). If the LLC does not support multispeed
concatenation, multispeed concatenation should not be enabled
in the PHY (see the EMC bit in PHY register 5).
•In order to accommodate the higher transmission speeds expected
in future revisions of the standard, P1394a extended the speed
code in bus requests from 2 bits to 3 bits, increasing the length of
the bus request from 7 bits to 8 bits. The new speed codes were
carefully selected so that new P1394a PHY and LLC devices
would be compatible, for speeds from S100 to S400, with legacy
PHY and LLC devices that use the 2-bit speed codes. The
PDI1394P24 correctly interprets both 7-bit bus requests (with 2-bit
speed code) and 8-bit bus requests (with 3-bit speed codes).
Moreover, if a 7-bit bus request is immediately followed by another
request (e.g., a register read or write request), the PDI1394P24
correctly interprets both requests. Although the PDI1394P24
correctly interprets 8-bit bus requests, a request with a speed code
exceeding S400 results in the PDI1394P24 transmitting a null
packet (data-prefix followed by data-end, with no data in the
packet).
17.4 Using the PDI1394P24 with a lower-speed
link layer
Although the PDI1394P24 is an S400 capable PHY, it may be used
with lower speed LLCs. In such a case, the LLC has fewer data
terminals than the PHY, and some Dn terminals on the PDI1394P24
will be unused. Unused Dn terminals should be pulled to ground
through 10 kΩ resistors.
The PDI1394P24 transfers all received packet data to the LLC,
even if the speed of the packet exceeds the capability of the LLC to
accept it. Some lower speed LLC designs do not properly ignore
packet data in such cases. On the rare occasions that the first 16
bits of partial data accepted by such a LLC match a node’s bus and
node ID, spurious header CRC or tcode errors may result.
In discussing this topic, the reader should be aware that the
IEEE1394a-2000 standard (paragraph 8.3.2.4.2) made the speed
maps defined in IEEE1394-1995 obsolete and defined a new field
(
link_spd
) in the Configuration ROM Bus_Info_Block where the
maximum speed of the node’s link layer is available. The
PDI1394P24 PHY’s default maximum speed is reported in the
self-ID packet. The IEEE1394a-2000 standard notes that bus
managers that implement the SPEED_MAP registers as specified
by IEEE Std 1394-1995 are compliant with the IEEE1394a-2000
standard but users are cautioned that the addresses utilized by
these registers may be redefined in future IEEE standards. Without
a bus manager-created and maintained speed map, in order to
transmit at the highest speed along a path, a transmitting node must
determine the
speed) for a target node and each of the PHY speed capabilities
along the path between the source and target nodes. That is, each
node would have to create a network speed map. Some designers
may choose to implement a speed map in bus manager-capable
nodes to maximize transmission speed when a slower-than-PHY
link chip exists in a node along the transmission path. The following
paragraphs are presented for use with products that utilize speed
maps.
node
speed capability (lesser of link speed or PHY
2001 Sep 06
21

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
During bus initialization following a bus-reset, each PHY transmits a
self-ID packet that indicates, among other information, the speed
capability of the PHY. The bus manager (if one exists) may build a
speed-map from the collected self-ID packets. This speed-map
gives the highest possible speed that can be used on the
node-to-node communication path between every pair of nodes in
the network. However, as explained below, the speed reported in the
self-ID packet of a PDI1394P24 PHY may be adjusted to account for
a slow link chip.
In the case of a node consisting of a higher-speed PHY and a
lower-speed LLC, the speed capability of the node (lesser of the
PHY and LLC speed) is that of the lower-speed LLC. A
sophisticated bus manager can determine the LLC speed capability
by reading the configuration ROM Bus_Info_Block, or by sending
asynchronous request packets at different speeds to the node and
checking for an acknowledge; the speed-map may then be adjusted
accordingly. The speed-map should reflect that communication to
such a node must be done at the lower speed of the LLC, instead of
the higher speed of the PHY. However, speed-map entries for paths
that merely pass through the node’s PHY, but do not terminate at
that node, should not be restricted by the lower speed of the LLC.
To assist in building an accurate speed-map, the PDI1394P24 has
the capability of indicating a speed other than S400 in its transmitted
self-ID packet. This is controlled by the Link_Speed field in
register 8 of the Vendor-Dependent page (page 7). Setting the
Link_Speed field affects only the speed indicated in the self-ID
packet; it has no effect on the speed signaled to peer (adjacent
directly connected) PHYs during self-ID. The PDI1394P24 identifies
itself as S400 capable to its peers regardless of the value in the
Link_Speed field.
Generally , the Link_Speed field in register 8 of the
Vendor-Dependent page should not be changed from its power-on
default value of S400 unless it is determined that the speed-map (if
one exists) is incorrect for path entries terminating in the local node
(i.e. the node has a slower link layer chip). If the speed-map is
incorrect, it can be assumed that the bus manager has used only
the self-ID packet information to build the speed-map. In this case,
the node may update the Link_Speed field in register 8 to reflect the
lower speed capability of the LLC and then initiate another bus-reset
to cause the speed-map to be rebuilt. Note that in this scenario any
speed-map entries for node-to-node communication paths that pass
through the local node’s PHY will be restricted by the lower speed.
In the case of a leaf node (which has only one active port) the
Link_Speed field in register 8 may be set to indicate the speed of the
LLC without first checking the speed-map. Changing the
Link_Speed field in a leaf node can only affect those paths that
terminate at that node, since no other paths can pass through a leaf
node. It can have no effect on other paths in the speed-map. For
hardware configurations which can only be a leaf node (all ports but
one are unimplemented), it is recommended that the Link_Speed
field be updated immediately after power-on or hardware reset.
2001 Sep 06
22

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
17.5 Crystal selection
The PDI1394P24 is designed to use an external 24.576 MHz crystal
connected between the XI and XO terminals to provide the
reference for an internal oscillator circuit. This oscillator in turn
drives a PLL circuit that generates the various clocks required for
transmission and resynchronization of data at the S100 through
S400 media data rates.
A variation of less than ±100 ppm from nominal for the media data
rates is required by IEEE Std 1394. Adjacent PHYs may therefore
have a difference of up to 200 ppm from each other in their internal
clocks, and PHYs must be able to compensate for this difference
over the maximum packet length. Larger clock variations may cause
resynchronization overflows or underflows, resulting in corrupted
packet data.
For the PDI1394P24, the SYSCLK output may be used to measure
the frequency accuracy and stability of the internal oscillator and
PLL from which it is derived. The frequency of the SYSCLK output
must be within ±100 ppm of the nominal frequency of 49.152 MHz.
The following are some typical specifications for crystals used with
the PDI1394P24 in order to achieve the required frequency
accuracy and stability:
•Crystal mode of operation: Fundamental
•Frequency tolerance at 25°C: Total frequency variation for the
complete circuit is +100 ppm. A crystal with +30 ppm frequency
tolerance is recommended for adequate margin.
•Frequency stability (over temperature and age): A crystal with
+30 ppm frequency stability is recommended for adequate
margin.
itself (C
). The value of C
BD
is typically about 1 pF, and CBD is
PHY
typically 0.8 pF per centimeter of board etch; a typical board can
have 3 pF to 6 pF or more. The load capacitors C9 and C10
combine as capacitors in series so that the total load capacitance is:
C
= [(C9 * C10) / (C9+C10)] + C
L
C9
24.576 MHz
ls
C10
+ CBD.
PHY
X1 C
PHY
+ C
XI
BD
XO
SV01808
Figure 11. Load Capacitance for the PDI1394P24 PHY
NOTE: The layout of the crystal portion of the PHY circuit is
important for obtaining the correct frequency, minimizing noise
introduced into the PHY’s Phase Lock Loop, and minimizing any
emissions from the circuit. The crystal and two load capacitors
should be considered as a unit during layout. The crystal and load
capacitors should be placed as close as possible to one another
while minimizing the loop area created by the combination of the
three components. V arying the size of the capacitors may help in
this. Minimizing the loop area minimizes the effect of the resonant
current (Is) that flows in this resonant circuit. This layout unit (crystal
and load capacitors) should then be placed as close as possible to
the PHY XI and XO terminals to minimize trace lengths.
NOTE: The total frequency variation must be kept below ±100 ppm
from nominal with some allowance for error introduced by board and
device variations. Trade–offs between frequency tolerance and
stability may be made as long as the total frequency variation is less
than ±100 ppm. For example, the frequency tolerance of the crystal
may be specified at 50 ppm and the temperature tolerance may be
specified at 30 ppm to give a total of 80 ppm possible variation due
to the crystal alone. Crystal aging also contributes to the frequency
variation.
•Load capacitance: For parallel resonant mode crystal circuits, the
frequency of oscillation is dependent upon the load capacitance
specified for the crystal. Total load capacitance (C
of not only the discrete load capacitors, but also board layout and
circuit. It may be necessary to iteratively select discrete load
capacitors until the SYSCLK output is within specification. It is
recommended that load capacitors with a maximum of "5%
tolerance be used.
As an example, for a board which uses a crystal specified for 12 pF
loading, load capacitors (C9 and C10 in Figure 11) of 16 pF each
are appropriate for the layout of that particular board. The load
specified for the crystal includes the load capacitors (C9, C10), the
loading of the PHY terminals (C
), and the loading of the board
PHY
) is a function
L
C9 C10
X1
SV01809
Figure 12. Recommended Crystal and Capacitor Layout
It is strongly recommended that part of the verification process for
the design be to measure the frequency of the SYSCLK output of
the PHY. This should be done with a frequency counter with an
accuracy of 6 digits or better. If the SYSCLK frequency is more than
the crystal’s tolerance from 49.152 MHz, the load capacitance of the
crystal may be varied to improve frequency accuracy. If the
frequency is too high add more load capacitance; if the frequency is
too low decrease load capacitance. Typically, changes should be
done to both load capacitors (C9 and C10 above) at the same time,
and both should be of the same value. Additional design details and
requirements may be provided by the crystal vendor.
2001 Sep 06
23

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
18.0 PRINCIPLES OF OPERATION
The PDI1394P24 is designed to operate with an LLC such as the
Philips Semiconductors PDI1394L1 1 or PDI1394L21. The following
paragraphs describe the operation of the PHY -LLC interface.
The interface to the LLC consists of the SYSCLK, CTL0–CTL1,
D0–D7, LREQ, LPS, C/LKON, and ISO
terminals on the
PDI1394P24 as shown in Figure 13.
PDI1394P24
SYSCLK
LINK LAYER
CONTROLLER
CTL0–CTL1
D0–D7
LREQ
LPS
C/LKON
/ISO/ISO/ISO
SV01827
Figure 13. PHY-LLC interface
The SYSCLK terminal provides a 49.152 MHz interface clock. all
control and data signals are synchronized to, and sampled on, the
rising edge of SYSCLK.
The CTL0 and CTL1 terminals form a bidirectional control bus,
which controls the flow of information and data between the
PDI1394P24 and LLC.
The D0–D7 terminals form a bidirectional data bus, which is used to
transfer status information, control information, or packet data
between the devices. The PDI1394P24 supports S100, S200, and
S400 data transfers over the D0–D7 data bus. In S100 operation
only the D0 and D1 terminals are used; in S200 operation only the
D0–D3 terminals are used; and in S400 operation all D0–D7
terminals are used for data transfer. When the PDI1394P24 is in
control of the D0–D7 bus, unused Dn terminals are driven low during
S100 and S200 operations. When the LLC is in control of the D0–D7
bus, unused Dn terminals are ignored by the PDI1394P24.
The LREQ terminal is controlled by the LLC to send serial service
requests to the PHY in order to request access to the serial bus for
packet transmission, read or write PHY registers, or control
arbitration acceleration.
The LPS and C/LKON terminals are used for power management of
the PHY and LLC. The LPS terminal indicates the power status of
the LLC, and may be used to reset the PHY-LLC interface or to
disable SYSCLK. The C/LKON terminal is used to send a wake-up
notification to the LLC and to indicate an interrupt to the LLC when
either LPS is inactive or the PHY register L bit is zero.
The ISO
terminal is used to enable the output differentiation logic on
the CTL0–CTL1 and D0–D7 terminals. Output differentiation is
required when an isolation barrier of the type described in Annex J
of IEEE Std 1394-1995 is implemented between the PHY and LLC.
The PDI1394P24 normally controls the CTL0–CTL1 and D0–D7
bidirectional buses. The LLC is allowed to drive these buses only
after the LLC has been granted permission to do so by the PHY.
There are four operations that may occur on the PHY -LLC interface:
link service request, status transfer, data transmit, and data receive.
The LLC issues a service request to read or write a PHY register, to
request the PHY to gain control of the serial bus in order to transmit
a packet, or to control arbitration acceleration.
The PHY may initiate a status transfer either autonomously or in
response to a register read request from the LLC.
The PHY initiates a receive operation whenever a packet is received
from the serial bus.
The PHY initiates a transmit operation after winning control of the
serial-bus following a bus request by the LLC. The transmit
operation is initiated when the PHY grants control of the interface to
the LLC.
The encoding of the CTL0–CTL1 bus is shown in Table 9 and
Table 10.
Table 9. CTL encoding when PHY has control of the bus
CTL0 CTL1 NAME DESCRIPTION
0 0 Idle No activity (this is the default mode)
0 1 Status Status information is being sent from the PHY to the LLC
1 0 Receive An incoming packet is being sent from the PHY to the LLC
1 1 Grant The LLC has been given control of the bus to send an outgoing packet
Table 10. CTL encoding when LLC has control of the bus
CTL0 CTL1 NAME DESCRIPTION
0 0 Idle The LLC releases the bus (transmission has been completed)
0 1 Hold The LLC is holding the bus while data is being prepared for transmission, or indicating
1 0 Transmit An outgoing packet is being sent from the LLC to the PHY
1 1 Reserved None
2001 Sep 06
that another packet is to be transmitted (concatenated) without arbitrating
24

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
LR0 LR1 LR2 LR3 LR(n–2) LR(n–1)
SV01758
Figure 14. LREQ Request Stream
18.1 LLC service request
To request access to the bus, to read or write a PHY register, or to
control arbitration acceleration, the LLC sends a serial bit stream on
the LREQ terminal as shown in Figure 14.
The length of the stream will vary depending on the type of request
as shown in Table 11.
Table 11. Request Stream Bit Length
REQUEST TYPE NUMBER OF BITS
Bus request 7 or 8
Read register request 9
Write register request 17
Acceleration control request 6
Regardless of the type of request, a start bit of 1 is required at the
beginning of the stream, and a stop bit of 0 is required at the end of
the stream. The second through fourth bits of the request stream
indicate the type of the request. In the descriptions below, bit 0 is the
most significant, and is transmitted first in the request bit stream.
The LREQ terminal is normally low.
Encoding for the request type is shown in Table 12.
Table 12. Request Type Encoding
LR1–LR3 NAME DESCRIPTION
000 ImmReq Immediate bus request. Upon
detection of idle, the PHY takes
control of the bus immediately
without arbitration
001 IsoReq Isochronous bus request. Upon
detection of idle, the PHY arbitrates
for the bus without waiting for a
subaction gap.
010 PriReq Priority bus request. The PHY
arbitrates for the bus after a
subaction gap, ignores the fair
protocol.
011 FairReq Fair bus request. The PHY
arbitrates for the bus after a
subaction gap, follows the fair
protocol
100 RdReg The PHY returns the specified
register contents through a status
transfer.
101 WrReg Write to the specified register.
110 AccelCtl Enable or disable asynchronous
arbitration acceleration.
111 Reserved Reserved.
For a bus request the length of the LREQ bit stream is 7 or 8 bits, as
shown in Table 13.
Table 13. Bus Request
BIT(S) NAME DESCRIPTION
0 Start Bit Indicates the beginning of the transfer
(always 1).
1–3 Request Type Indicates the type of bus request. See
Table 12.
4–6 Request Speed Indicates the speed at which the PHY
will send the data for this request. See
Table 14 for the encoding of this field.
7 Stop Bit Indicates the end of the transfer
(always 0). If bit 6 is 0, this bit may be
omitted.
The 3-bit request speed field used in bus requests is shown in
Table 14.
Table 14. Bus Request Speed Encoding
LR4–LR6 DATA RATE
000 S100
010 S200
100 S400
All others Invalid
NOTE:
The PDI1394P24 will accept a bus request with an invalid speed
code and process the bus request normally. However, during packet
transmission for such a request, the PDI1394P24 will ignore any
data presented by the LLC and will transmit a null packet.
For a read register request, the length of the LREQ bit stream is
9 bits as shown in Table 15.
Table 15. Read Register Request
BIT(S) NAME DESCRIPTION
0 Start Bit Indicates the beginning of the transfer
(always 1).
1–3 Request Type A 100 indicating this is a read register
request.
4–7 Address Identifies the address of the PHY register
to be read.
8 Stop Bit Indicates the end of the transfer
(always 0).
2001 Sep 06
25

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
For a write register request, the length of the LREQ bit stream is
17 bits as shown in Table 16.
Table 16. Write Register Request
BIT(S) NAME DESCRIPTION
0 Start Bit Indicates the beginning of the transfer
(always 1).
1–3 Request Type A 101 indicating that this is a write
register request.
4–7 Address Identifies the address of the PHY
register to be written to.
8–15 Data Gives the data that is to be written to the
specified register address.
16 Stop Bit Indicates the end of the transfer
(always 0).
For an acceleration control request, the length of the LREQ data
stream is 6 bits as shown in Table 17.
Table 17. Acceleration Control Request
BIT(S) NAME DESCRIPTION
0 Start Bit Indicates the beginning of the transfer
(always 1).
1–3 Request Type A 110 indicating this is an acceleration
control request.
4 Control Asynchronous period arbitration
acceleration is enabled if 1, and
disabled if 0.
5 Stop Bit Indicates the end of the transfer
(always 0).
For fair or priority access, the LLC sends the bus request (FairReq or
PriReq) at least one clock after the PHY-LLC interface becomes idle. If
the CTL terminals are asserted to the receive state (10b) by the PHY ,
then any pending fair or priority request is lost (cleared). Additionally,
the PHY ignores any fair or priority requests if the Receive state is
asserted while the LLC is sending the request. The LLC may then
reissue the request one clock after the next interface idle.
The cycle master node uses priority bus request (PriReq) to send a
cycle start packet. After receiving or transmitting a cycle start
packet, the LLC can issue an isochronous bus request (IsoReq).
The PHY will clear an isochronous request only when the bus has
been won.
To send an acknowledge packet, the link must issue an immediate
bus request (ImmReq) during the reception of the packet addressed
to it. This is required in order to minimize the idle gap between the
end of the received packet and the start of the transmitted
acknowledge packet. As soon as the receive packet ends, the PHY
immediately grants control of the bus to the LLC. The LLC sends an
acknowledgment to the sender unless the header CRC of the
received packet is corrupted. In this case, the LLC does not transmit
an acknowledge, but instead cancels the transmit operation and
releases the interface immediately; the LLC must not use this grant
to send another type of packet. After the interface is released, the
LLC may proceed with another request.
The LLC may request only one bus request at a time. Once the LLC
issues any request for bus access (ImmReq, IsoReq, FairReq, or
PriReq), it cannot issue another request until the PHY indicates that
the bus request was “lost” (bus arbitration lost and another packet
received), or “won” (bus arbitration won and the LLC granted
control). The PHY ignores new bus requests while a previous bus
request is pending. All bus requests are cleared upon a bus reset.
For write register requests, the PHY loads the specified data into the
addressed register as soon as the request transfer is complete. For
read register requests, the PHY returns the contents of the
addressed register to the LLC at the next opportunity through a
status transfer. If a received packet interrupts the status transfer,
then the PHY continues to attempt the transfer of the requested
register until it is successful. A write or read register request may be
made at any time, including while a bus request is pending. Once a
read register request is made, the PHY ignores further read register
requests until the register contents are successfully transferred to
the LLC. A bus reset does not clear a pending read register request.
The PDI1394P24 includes several arbitration acceleration
enhancements which allow the PHY to improve bus performance
and throughput by reducing the number and length of inter-packet
gaps. These enhancements include autonomous (fly-by)
isochronous packet concatenation, autonomous fair and priority
packet concatenation onto acknowledge packets, and accelerated
fair and priority request arbitration following acknowledge packets.
Then enhancements are enabled when the EAA bit in PHY
register 5 is set.
The arbitration acceleration enhancements may interfere with the
ability of the cycle master node to transmit the cycle start packet
under certain circumstances. The acceleration control request is
therefore provided to allow the LLC to temporarily enable or disable
the arbitration acceleration enhancements of the PDI1394P24
during the asynchronous period. The LLC typically disables the
enhancements when its internal cycle counter rolls over indicating
that a cycle start packet is imminent, and then re-enables the
enhancements when it receives a cycle start packet. The
acceleration control request may be made at any time, however, and
is immediately serviced by the PHY. Additionally , a bus reset or
isochronous bus request will cause the enhancements to be
re-enabled, if the EAA bit is set.
2001 Sep 06
26

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
18.2 Status transfer
A status transfer is initiated by the PHY when there is status
information to be transferred to the LLC. The PHY waits until the
interface is idle before starting the transfer. The transfer is initiated
by the PHY asserting Status (01b) on the CTL terminals, along with
the first two bits of status information on the D[0:1] terminals. The
PHY maintains CTL = Status for the duration of the status transfer.
The PHY may prematurely end a status transfer by asserting
something other than Status on the CTL terminals. This occurs if a
packet is received before the status transfer completes. The PHY
continues to attempt to complete the transfer until all status
information has been successfully transmitted. There is at least one
idle cycle between consecutive status transfers.
The PHY normally sends just the first four bits of status to the LLC.
These bits are status flags that are needed by the LLC state
machines. The PHY sends an entire 16-bit status packet to the LLC
after a read register request, or when the PHY has pertinent
information to send to the LLC or transaction layers. The only
defined condition where the PHY automatically sends a register to
the LLC is after self-ID, where the PHY sends the physical-ID
register that contains the new node address. All status transfers are
either 4 or 16 bits unless interrupted by a received packet. The
status flags are considered to have been successfully transmitted to
the LLC immediately upon being sent, even if a received packet
subsequently interrupts the status transfer. Register contents are
considered to have been successfully transmitted only when all
8 bits of the register have been sent. A status transfer is retried after
being interrupted only if any status flags remain to be sent, or if a
register transfer has not yet completed.
The definition of the bits in the status transfer is shown in Table 18,
and the timing is shown in Figure 15.
The sequence of events for a status transfer is as follows:
•Status transfer initiated. the PHY indicates a status transfer by
asserting status on the CTL lines along with the status data on
the D0 and D1 lines (only 2 bits of status are transferred per
cycle). Normally (unless interrupted by a receive operation), a
status transfer will be either 2 or 8 cycles long. A 2-cycle (4 bit)
transfer occurs when only status information is to be sent. An
8-cycle (16 bit) transfer occurs when register data is to be sent in
addition to any status information.
•Status transfer terminated. The PHY normally terminates a status
transfer by asserting idle on the CTL lines. If a bus reset is
pending, the PHY may also assert Grant on the CTL line
immediately following a complete status transfer.
Table 18. Status Bits
BIT(S) NAME DESCRIPTION
0 Arbitration Reset Gap Indicates that the PHY has detected that the bus has been idle for an arbitration reset gap time (as
1 Subaction gap Indicates that the PHY has detected that the bus has been idle for a subaction gap time (as defined in the
2 Bus reset Indicates that the PHY has entered the bus reset state.
3 Interrupt Indicates that a PHY interrupt event has occurred. An interrupt event may be a configuration time-out, a
4–7 Address This field holds the address of the PHY register whose contents are being transferred to the LLC.
8–15 Data This field holds the register contents.
CTL0, CTL1
defined in the IEEE 1394–1995 standard). This bit is used by the LLC in the busy/retry state machine.
IEEE 1394–1995 standard). This bit is used by the LLC to detect the completion of an isochronous cycle.
cable-power voltage falling too low , a state time-out, or a port status change.
SYSCLK
(a) (b)
00
01
00
SV01759
D0, D1
00
00
01
S[14:15]S[0:1]
Figure 15. Status Transfer Timing
2001 Sep 06
27

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
18.3 Receive
Whenever the PHY detects the data-prefix state on the serial bus, it
initiates a receive operation by asserting Receive on the CTL terminals
and a logic 1 on each of the D terminals (“data-on” indication). The
PHY indicates the start of a packet by placing the speed code
(encoded as shown in T able 19) on the D terminals, followed by
packet data. The PHY holds the CTL terminals in the Receive state
until the last symbol of the packet has been transferred. The PHY
indicates the end of packet data by asserting Idle on the CTL
terminals. All received packets are transferred to the LLC. Note that
the speed code is part of the PHY-LLC protocol and is not included in
the calculation of CRC or any other data protection mechanisms.
Table 19. Speed Code for the Receiver
D0–D7 DATA RATE
0000 0000 S100
0100 0000 S200
0101 0000 S400
1111 1111 “data-on” indication
It is possible for the PHY to receive a null packet, which consists of
the data-prefix state on the serial bus followed by the data-end state,
without any packet data. A null packet is transmitted whenever the
packet speed exceeds the capability of the receiving PHY, or
whenever the LLC immediately releases the bus without transmitting
any data. In this case, the PHY will assert Receive on the CTL
terminals with the “data-on” indication (all 1’s) on the D terminals,
followed by Idle on the CTL terminals, without any speed code or
data being transferred. In all cases, in normal operation, the
PDI1394P24 sends at least one “data-on” indication before sending
the speed code or terminating the receive operation.
The PDI1394P24 also transfers its own self-ID packet, transmitted
during the self-ID phase of bus initialization to the LLC. This packet
is transferred to the LLC just as any other received self-ID packet.
The sequence of events for a normal packet reception is as follows:
•Receive operation initiated. The PHY indicates a receive
operation by asserting Receive on the CTL lines. Normally, the
interface is idle when receive is asserted. However, the receive
operation may interrupt a status transfer operation that is in
progress so that the CTL lines may change from status to receive
without an intervening idle.
•Data-on indication. The PHY may assert the data-on indication code
on the D lines for one or more cycles preceding the speed code.
•Speed code. the PHY indicates the speed of the received packet
by asserting a speed code on the D lines for one cycle
immediately preceding packet data. The link decodes the speed
code on the first Receive cycle for which the D lines are not the
data-on code. If the speed code is invalid, or indicates a speed
higher than that which the link is capable of handling, the link
should ignore the subsequent data.
•Receive data. Following the data-on indication (if any) and the
speed code, the PHY asserts packet data on the D lines with
receive on the CTL lines for the remainder of the receive
operation.
•Receive operation terminated. The PHY terminates the receive
operation by asserting the idle on the CTL lines. The PHY asserts
at least one cycle of idle following a receive operation.
SYSCLK
(a)
CTL0, CTL1
D0–D7
00
01
(b)
XX
NOTE: SPD = Speed code; see Table 19; d0–dn = Packet data.
Figure 16. Normal Packet Reception Timing
10
(c) (d)
00
(e)
d0SPD
dnFF (“data-on”)
00
SV01760
2001 Sep 06
28

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
The sequence of events for a null packet reception is as follows:
•Receive operation initiated. The PHY indicates a receive
operation by asserting receive on the CTL lines. Normally, the
interface is idle when receive is asserted. However, the receive
operation may interrupt a status transfer operation that is in
progress so that the CTL lines may change from status to receive
without an intervening idle.
SYSCLK
CTL0, CTL1
D0–D7
00
01
XX
Figure 17. Null Packet Reception Timing
(a)
FF (“data-on”)
•Data-on indication. The PHY asserts the data-on indication code
on the D lines for one or more cycles.
•Receive operation terminated. The PHY terminates the receive
operation by asserting Idle on the CTL lines. The PHY shall
assert at least one cycle of Idle following a receive operation.
10
(b)
00
(c)
00
SV01761
2001 Sep 06
29

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
18.4 Transmit
When the LLC issues a bus request through the LREQ terminal, the
PHY arbitrates to gain control of the bus. If the PHY wins arbitration
for the serial bus, the PHY -LLC interface bus is granted to the link by
asserting the Grant state (11b) on the CTL terminals for one
SYSCLK cycle, followed by Idle for one clock cycle. The LLC then
takes control of the bus by asserting either Idle (00b), Hold (01b), or
Transmit (10b) on the CTL terminals. Unless the LLC is immediately
releasing the interface, the link may assert the Idle state for at most
one clock before it must assert either Hold or Transmit on the CTL
terminals. The Hold state is used by the LLC to retain control of the
bus while it prepares data for transmission. The LLC may assert
Hold for zero or more clock cycles (i.e., the LLC need not assert
Hold before Transmit). The PHY asserts data-prefix on the serial
bus during this time.
When the LLC is ready to send data, the LLC asserts Transmit on
the CTL terminals as well as sending the first bits of packet data on
the D lines. The Transmit state is held on the CTL terminals until the
last bits of data have been sent. The LLC then asserts either Hold or
Idle on the CTL terminals for one clock cycle and then asserts Idle
for one additional cycle before releasing the interface bus and
putting the CTL and D terminals in a high-impedance state. The
PHY then regains control of the interface bus.
The Hold state asserted at the end of packet transmission indicates
to the PHY that the LLC requests to send another packet
(concatenated packet) without releasing the serial bus. The PHY
responds to this concatenation request by waiting the required
minimum packet separation time and then asserting Grant as
before. This function may be used to send a unified response after
sending an acknowledge, or to send consecutive isochronous
packets during a single isochronous period. Unless multi-speed
concatenation is enabled, all packets transmitted during a single bus
ownership must be of the same speed (since the speed of the
packet is set before the first packet). If multi-speed concatenation is
enabled (when the EMSC bit of PHY register 5 is set), the LLC must
specify the speed code of the next concatenated packet on the D
terminals when it asserts Hold on the CTL terminals at the end of a
packet. The encoding for this speed code is the same as the speed
code that precedes received packet data as given in Table 19.
After sending the last packet for the current bus ownership, the LLC
releases the bus by asserting Idle on the CTL terminals for two clock
cycles. The PHY begins asserting Idle on the CTL terminals one
clock after sampling Idle from the link. Note that whenever the D and
CTL terminals change direction between the PHY and the LLC,
there is an extra clock period allowed so that both sides of the
interface can operate on registered versions of the interface signals.
The sequence of events for a normal packet transmission is as
follows:
•Transmit operation initiated. The PHY asserts grant on the CTL
lines followed by Idle to hand over control of the interface to the
link so that the link may transmit a packet. The PHY releases
control of the interface (i.e., it 3-States the CTL and D outputs)
following the idle cycle.
•Optional idle cycle. The link may assert at most one idle cycle
preceding assertion of either hold or transmit. This idle cycle is
optional; the link is not required to assert Idle preceding either
hold or transmit.
•Optional hold cycles. The link may assert hold for up to 47 cycles
preceding assertion of transmit. These hold cycle(s) are optional;
the link is not required to assert hold preceding transmit.
•Transmit data. When data is ready to be transmitted, the link
asserts transmit on the CTL lines along with the data on the D
lines.
•Transmit operation terminated. The transmit operation is
terminated by the link asserting hold or idle on the CTL lines the
link asserts hold to indicate that the PHY is to retain control of the
serial bus in order to transmit a concatenated packet. the link
asserts idle to indicate that packet transmission is complete and
the PHY may release the serial bus. The link then asserts Idle for
one more cycle following this cycle of hold or idle before releasing
the interface and returning control the the PHY.
•Concatenated packet speed-code. If multi-speed concatenation is
enabled in the PHY, the link shall assert a speed-code on the D
lines when it asserts Hold to terminate packet transmission. This
speed-code indicates the transmission speed for the
concatenated packet that is to follow. The encoding for this
concatenated packet speed-code is the same as the encoding for
the received packet speed-code (see Table 19). the link may not
concatenate an S100 packet onto any higher speed packet.
•After regaining control of the interface, the PHY shall assert at
least one cycle of idle before any subsequent status transfer,
receive operation, or transmit operation.
SYSCLK
(a) (b) (d) (e) (g)
CTL0, CTL1
D0–D7
00
11 00 00 01 10 00 00
00
00
NOTE: SPD = Speed code; see Table 19; d0–dn = Packet data.
Figure 18. Normal Packet Transmission Timing
2001 Sep 06
(c)
d0, d1, ...
Link Controls Ctl and D
PHY High-impedance Ctl and D Outputs
30
00
01
(f)
dn
00
SPD
00 00
SV01762

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
The sequence of events for a cancelled/null packet transmission is
as follows:
•Transmit operation initiated. PHY asserts grant on the CTL lines
followed by idle to hand over control of the interface to the link.
•Optional Idle cycle. The link may assert at most one idle cycle
preceding assertion of hold. This idle cycle is optional; the link is
not required to assert idle preceding Hold.
•Optional Hold cycles. The link may assert Hold for up to 47 cycles
preceding assertion of idle. These hold cycle(s) are optional; the
link is not required to assert hold preceding Idle.
SYSCLK
CTL0, CTL1
D0–D7
(a)
00 11 00
00
Figure 19. Cancelled/Null Packet Transmission
(b) (c) (d) (e)
00
•Null transmit termination. The null transmit operation is terminated
by the link asserting two cycles of idle on the CTL lines and then
releasing the interface and returning control to the PHY. Note that
the link may assert Idle for a total of 3 consecutive cycles if it
asserts the optional first idle cycle but does not assert hold. It is
recommended that the link assert 3 cycles of Idle to cancel a
packet transmission if no hold cycles are asserted. This ensures
that either the link or PHY controls the interface in all cycles.
•After regaining control of the interface, the PHY shall assert at
least one cycle of Idle before any subsequent status transfer,
receive operation, or transmit operation.
Link Controls Ctl and D
PHY High-impedance Ctl and D Outputs
0001
00
0000
SV01763
18.5 Interface reset and disable
The LLC controls the state of the PHY-LLC interface using the LPS
signal. The interface may be placed into a reset state, a disabled
state, or be made to initialize and then return to normal operation.
When the interface is not operational (whether reset, disabled, or in
the process of initialization) the PHY cancels any outstanding bus
request or register read request, and ignores any requests made via
the LREQ line. Additionally, any status information generated by the
PHY will not be queued and will not cause a status transfer upon
restoration of the interface to normal operation.
The LPS signal may be either a level signal or a pulsed signal,
depending upon whether the PHY–LLC interface is a direct
connection or is made across an isolation barrier. When an isolation
barrier exists between the PHY and LLC (whether of the Philips
bus-holder type or Annex J type) the LPS signal must be pulsed. In
a direct connection, the LPS signal may be either a pulsed or a level
signal. Timing parameters for the LPS signal are given in Table 20.
2001 Sep 06
31

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
Table 20. LPS Timing Parameters
PARAMETER DESCRIPTION MIN MAX UNIT
T
LPSL
T
LPSH
T
LPS_RESET
T
LPS_DISABLE
T
RESTORE
T
CLK_ACTIVATE
NOTES:
1. The specified T
those specified for the same parameters in the P1394a Supplement (i.e., an implementation of LPS that meets the requirements of P1394a
will operate correctly with the PDI1394P24).
2. A pulsed LPS signal must have a duty cycle (ratio of T
isolation barrier on the LPS signal (e.g., as shown in Figure 8)
3. The maximum value for T
before LPS is reasserted. Otherwise, in order to reset but not disable the interface it is necessary that the LLC ensure that LPS is
deasserted for less than T
LPS low time (when pulsed) (see Note 1) 0.09 2.60 µs
LPS high time (when pulsed) (see Note 1) 0.021 2.60 µs
LPS duty cycle (when pulsed) (see Note 2) 20 55 %
Time for PHY to recognize LPS deasserted and reset the interface 2.60 2.68 µs
Time for PHY to recognize LPS deasserted and disable the interface 26.03 26.1 1 µs
Time to permit optional isolation circuits to restore during an interface reset 15 23
Time for SYSCLK to be activated from reassertion of LPS — 60 ns
LPSL
and T
times are worst–case values appropriate for operation with the PDI1394P24. These values are broader than
LPSH
to cycle period) in the specified range to ensure proper operation when using an
LPSH
RESTORE
does not apply when the PHY–LLC interface is disabled, in which case an indefinite time may elapse
LPS_DISABLE
.
3
µs
The LLC requests that the interface be reset by deasserting the LPS
signal and terminating all bus and request activity. When the PHY
observes that LPS has been deasserted for T
LPS_RESET
, it resets
the interface. When the interface is in the reset state, the PHY sets
(low)
ISO
(a)
SYSCLK
CTL0, CTL1
D0 – D7
(b)
LREQ
LPS
T
LPS_RESET
T
T
LPSL
LPSH
its CTL and D outputs in the logic 0 state and ignores any activity on
the LREQ signal. The timing for interface reset is shown in Figure 20
and Figure 21.
(c)
(d)
T
RESTORE
SV01810
2001 Sep 06
Figure 20. Interface Reset, ISO Low
32

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
The sequence of events for resetting the PHY -LLC interface when it
is in the differentiated mode of operation (ISO
terminal is low) is as
follows:
1. Normal operation. Interface is operating normally, with LPS
active, SYSCLK active, status and packet data reception and
transmission via the CTL and D lines, and request activity via
the LREQ line.
2. LPS deasserted. The LLC deasserts the LPS signal and, within
1.0 ms, terminates any request or interface bus activity, and
places its LREQ, CTL, and D outputs into a high-impedance
state (the LLC should terminate any output signal activity such
that signals end in a logic 0 state).
ISO
(high)
SYSCLK
CTL0, CTL1
D0 – D7
(a)
(b)
3. Interface reset. After T
LPS_RESET
time, the PHY determines that
LPS is inactive, terminates any interface bus activity, and places
its CTL and D outputs into a high-impedance state (the PHY will
terminate any output signal activity such that signals end in a
logic 0 state). The PHY -LLC interface is now in the reset state.
4. Interface restored. After the minimum T
may again assert LPS active. (The minimum T
RESTORE
time, the LLC
RESTORE
provides sufficient time for the biasing networks used in Annex J
type isolation barrier circuits to stabilize and reach a quiescent
state if the isolation barrier has somehow become unbalanced.)
When LPS is asserted, the interface will be initialized as
described on the next page.
(c)
interval
LREQ
LPS
T
LPS_RESET
Figure 21. Interface Reset, ISO High
T
RESTORE
(d)
SV01811
2001 Sep 06
33

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
The sequence of events for resetting the PHY -LLC interface when it
is in the nondifferentiated mode of operation (ISO
terminal is high) is
as follows:
1. Normal operation. Interface is operating normally, with LPS
asserted, SYSCLK active, status and packet data reception and
transmission via the CTL and D lines, and request activity via
the LREQ line. In the above diagram, the LPS signal is shown
as a non-pulsed level signal. However, it is permissible to use a
pulsed signal for LPS in a direct connection between the PHY
and LLC; a pulsed signal is required when using an isolation
barrier (whether of the Philips Bus Holder type or Annex J type).
2. LPS deasserted. The LLC deasserts the LPS signal and, within
1.0 ms, terminates any request or interface bus activity, places
its CTL and D outputs into a high-impedance state, and drives
its LREQ output low.
3. Interface reset. After T
LPS_RESET
time, the PHY determines that
LPS is inactive, terminates any interface bus activity, and drives
its CTL and D outputs low. The PHY-LLC interface is now in the
reset state.
(low)
ISO
SYSCLK
(a) (c)
4. Interface restored. After the minimum T
may again assert LPS active. (The minimum T
RESTORE
time, the LLC
RESTORE
interval
provides sufficient time for the biasing networks used in Annex J
type isolation barrier circuits to stabilize and reach a quiescent
state if the isolation barrier has somehow become unbalanced.)
When LPS is asserted, the interface will be initialized as
described below.
If the LLC continues to keep the LPS signal deasserted, it requests
that the interface be disabled. The PHY disables the interface when
it observes that LPS has been deasserted for T
LPS_DISABLE
. When
the interface is disabled, the PHY sets its CTL and D outputs as
stated above for interface reset, but also stops SYSCLK activity. The
interface is also placed into the disabled condition upon a hardware
reset of the PHY. The timing for interface disable is shown in
Figure 22 and Figure 23.
When the interface is disabled, the PHY will enter a low-power state
if none of its ports is active.
(d)
CTL0, CTL1
D0 – D7
LREQ
LPS
(b)
T
LPS_RESET
T
T
T
LPSH
LPSL
LPS_DISABLE
SV01812
Figure 22. Interface Disable, ISO Low
2001 Sep 06
34

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
The sequence of events for disabling the PHY -LLC interface when it
is in the differentiated mode of operation (ISO
terminal is low) is as
follows:
1. Normal operation. Interface is operating normally, with LPS
active, SYSCLK active, status and packet data reception and
transmission via the CTL and D lines, and request activity via
the LREQ line.
2. LPS deasserted. The LLC deasserts the LPS signal and, within 1
ms, terminates any request or interface bus activity, and places
its LREQ, CTL, and D outputs into a high-impedance state (the
LLC should terminate any output signal activity such that signals
end in a logic 0 state).
ISO
(high)
SYSCLK
CTL0, CTL1
D0 – D7
(a)
(b)
3. Interface reset. After T
LPS_RESET
time, the PHY determines that
LPS is inactive, terminates any interface bus activity, and places
its CTL and D outputs into a high-impedance state (the PHY will
terminate any output signal activity such that signals end in a
logic 0 state). The PHY -LLC interface is now in the reset state.
4. Interface disabled. If the LPS signal remain inactive for
T
LPS_DISABLE
time, the PHY terminates SYSCLK activity by
placing the SYSCLK output into a high-impedance state. The
PHY -LLC interface is now in the disabled state.
(c)
(d)
LREQ
LPS
T
LPS_RESET
T
LPS_DISABLE
Figure 23. Interface Disable, ISO High
SV01813
2001 Sep 06
35

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
The sequence of events for disabling the PHY -LLC interface when it
is in the non-differentiated mode of operation (ISO
terminal is high)
is as follows:
1. Normal operation. Interface is operating normally, with LPS
active, SYSCLK active, status and packet data reception and
transmission via the CTL and D lines, and request activity via
the LREQ line.
2. LPS deasserted. The LLC deasserts the LPS signal and, within
1.0 ms, terminates any request or interface bus activity, places
its CTL and D outputs into a high-impedance state, and drives
its LREQ output low.
3. Interface reset. After T
LPS_RESET
time, the PHY determines that
LPS is inactive, terminates any interface bus activity, and drives
ISO
SYSCLK
CTL0
CTL1
(low)
5 ns. min
10 ns. max
its CTL and D outputs low. The PHY-LLC interface is now in the
reset state.
4. Interface disabled. If the LPS signal remain inactive for
T
LPS_DISABLE
time, the PHY terminates SYSCLK activity by
driving the SYSCLK output low. The PHY-LLC interface is now in
the disabled state.
After the interface has been reset, or reset and then disabled, the
interface is initialized and restored to normal operation when LPS is
reasserted by the LLC. The timing for interface initialization is shown
in Figure 24 and Figure 25.
7 cycles
(c)
(d)(b)
D0 – D7
LREQ
LPS
(a)
T
CLK_ACTIVATE
SV01814
Figure 24. Interface Initialization, ISO Low
2001 Sep 06
36

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
The sequence of events for initialization of the PHY -LLC interface
when the interface is in the differentiated mode of operation (ISO
terminal is low) is as follows:
1. LPS reasserted. After the interface has been in the reset or
disabled state for at least the minimum T
RESTORE
time, the LLC
causes the interface to be initialized and restored to normal
operation by re-activating the LPS signal. (In the above diagram,
the interface is shown in the disabled state with SYSCLK
high-impedance inactive. However, the interface initialization
sequence described here is also executed if the interface is
merely reset but not yet disabled.)
2. SYSCLK activated. If the interface is disabled, the PHY
re-activates its SYSCLK output when it detects that LPS has
been reasserted. If the PHY has entered a low-power state, it
will take between 5.3 to 7.3 ms for SYSCLK to be restored; if the
PHY is not in a low-power state, SYSCLK will be restored within
60 ns. The PHY commences SYSCLK activity by driving the
SYSCLK output low for half a cycle. Thereafter, the SYSCLK
ISO
(high)
SYSCLK
(b)
CTL0
output is a 50% duty cycle square wave with a frequency of
49.152 MHz +100 ppm (period of 20.345 ns). Upon the first full
cycle of SYSCLK, the PHY drives the CTL and D terminals low
for one cycle. The LLC is also required to drive its CTL, D, and
LREQ outputs low during one of the first six cycles of SYSCLK
(in the above diagram, this is shown as occurring in the first
SYSCLK cycle).
3. Receive indicated. Upon the eighth SYSCLK cycle following
reassertion of LPS, the PHY asserts the Receive state on the
CTL lines and the data-on indication (all ones) on the D lines for
one or more cycles (because the interface is in the differentiated
mode of operation, the CTL and D lines will be in the
high-impedance state after the first cycle).
4. Initialization complete. The PHY asserts the Idle state on the
CTL lines and logic 0 on the D lines. This indicates that the
PHY -LLC interface initialization is complete and normal
operation may commence. The PHY will now accept requests
from the LLC via the LREQ line.
7 cycles
(c)
CTL1
D0 – D7
LREQ
(a)
LPS
T
CLK_ACTIVATE
Figure 25. Interface Initialization, ISO High
The sequence of events for initialization of the PHY -LLC interface
when the interface is in the non-differentiated mode of operation
(ISO
terminal is high) is as follows:
1. LPS reasserted. After the interface has been in the reset or
disabled state for at least the minimum T
RESTORE
time, the LLC
causes the interface to be initialized and restored to normal
operation by reasserting the LPS signal. (In the above diagram,
the interface is shown in the disabled state with SYSCLK low
inactive. However, the interface initialization sequence described
here is also executed if the interface is merely reset but not yet
disabled.)
2. SYSCLK activated. If the interface is disabled, the PHY
re-activates its SYSCLK output when it detects that LPS has
SV01815
been reasserted. If the PHY has entered a low-power state, it will
take between 5.3 to 7.3 ms for SYSCLK to be restored; if the
PHY is not in a low-power state, SYSCLK will be restored within
60 ns. The SYSCLK output is a 50% duty cycle square wave
with a frequency of 49.152 MHz +100 ppm (period of 20.345 ns).
During the first seven cycles of SYSCLK, the PHY continues to
drive the CTL and D terminals low. The LLC is also required to
drive its CTL and D outputs low for one of the first six cycles of
SYSCLK but to otherwise place its CTL and D outputs in a
high-impedance state. The LLC continues to drive its LREQ
output low during this time.
3. Receive indicated. Upon the eighth SYSCLK cycle following
reassertion of LPS, the PHY asserts the Receive state on the
2001 Sep 06
37

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
CTL lines and the data-on indication (all ones) on the D lines for
one or more cycles.
4. Initialization complete. The PHY asserts the Idle state on the
CTL lines and logic 0 on the D lines. This indicates that the
PHY -LLC interface initialization is complete and normal
operation may commence. The PHY will now accept requests
from the LLC via the LREQ line.
19.0 POWER-CLASS PROGRAMMING
The PC0–PC2 terminals are programmed to set the default value of the power-class indicated in the pwr field (bits 21–23) of the transmitted
self-ID packet. Descriptions of the various power-classes are given in Table 21. The default power-class value is loaded following a hardware
reset, but is overridden by any value subsequently loaded into the Pwr_Class field in register 4.
Table 21. Power Class Descriptions
PC0–PC2 DESCRIPTION
000 Node does not need power and does not repeat power.
001 Node is self powered, and provides a minimum of 15 W to the bus.
010 Node is self powered, and provides a minimum of 30 W to the bus.
011 Node is self powered, and provides a minimum of 45 W to the bus.
100 Node may be powered from the bus and is using up to 3 W.
101 Node is powered from the bus and uses up to 3 W. No additional power is needed to enable the link.
110 Node is powered from the bus and uses up to 3 W. An additional 3 W is needed to enable the link.
111 Node is powered from the bus and uses up to 3 W. An additional 7 W is needed to enable the link.
2001 Sep 06
38

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
LQFP64: plastic low profile quad flat package; 64 leads; body 10 x 10 x 1.4 mm SOT314-2
2001 Sep 06
39

Philips Semiconductors Objective data
PDI1394P242-port 400 Mbps physical layer interface
Data sheet status
Product
Data sheet status
Objective data
Preliminary data
Product data
[1] Please consult the most recently issued data sheet before initiating or completing a design.
[2] The product status of the device(s) described in this data sheet may have changed since this data sheet was published. The latest information is available on the Internet at URL
http://www.semiconductors.philips.com.
[1]
status
Development
Qualification
Production
[2]
Definitions
Short-form specification — The data in a short-form specification is extracted from a full data sheet with the same type number and title. For
detailed information see the relevant data sheet or data handbook.
Limiting values definition — Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 60134). Stress above one
or more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation of the device at these or
at any other conditions above those given in the Characteristics sections of the specification is not implied. Exposure to limiting values for extended
periods may affect device reliability.
Application information — Applications that are described herein for any of these products are for illustrative purposes only. Philips
Semiconductors make no representation or warranty that such applications will be suitable for the specified use without further testing or
modification.
Disclaimers
Life support — These products are not designed for use in life support appliances, devices or systems where malfunction of these products can
reasonably be expected to result in personal injury . Philips Semiconductors customers using or selling these products for use in such applications
do so at their own risk and agree to fully indemnify Philips Semiconductors for any damages resulting from such application.
Right to make changes — Philips Semiconductors reserves the right to make changes, without notice, in the products, including circuits, standard
cells, and/or software, described or contained herein in order to improve design and/or performance. Philips Semiconductors assumes no
responsibility or liability for the use of any of these products, conveys no license or title under any patent, copyright, or mask work right to these
products, and makes no representations or warranties that these products are free from patent, copyright, or mask work right infringement, unless
otherwise specified.
Contact information
For additional information please visit
http://www.semiconductors.philips.com . Fax: +31 40 27 24825
For sales offices addresses send e-mail to:
sales.addresses@www.semiconductors.philips.com.
Definitions
This data sheet contains data from the objective specification for product development.
Philips Semiconductors reserves the right to change the specification in any manner without notice.
This data sheet contains data from the preliminary specification. Supplementary data will be
published at a later date. Philips Semiconductors reserves the right to change the specification
without notice, in order to improve the design and supply the best possible product.
This data sheet contains data from the product specification. Philips Semiconductors reserves the
right to make changes at any time in order to improve the design, manufacturing and supply.
Changes will be communicated according to the Customer Product/Process Change Notification
(CPCN) procedure SNW-SQ-650A.
Koninklijke Philips Electronics N.V. 2001
All rights reserved. Printed in U.S.A.
Date of release: 09-01
Document order number: 9397 750 08749
2001 Sep 06
40
 Loading...
Loading...