

查询P89C660供应商查询P89C660供应商
INTEGRATED CIRCUITS
P89C660/P89C662/P89C664/P89C668
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP FLASH with 512B/1KB/2KB/8KB RAM
Product data
Replaces P89C660/P89C662/P89C664 of 2001 Jul 19
and P89C668 of 2001 Jul 27
2002 Oct 28

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
DESCRIPTION
The P89C660/662/664/668 device contains a non-volatile
16KB/32KB/64KB Flash program memory that is both parallel
programmable and serial In-System and In-Application
Programmable. In-System Programming (ISP) allows the user to
download new code while the microcontroller sits in the application.
In-Application Programming (IAP) means that the microcontroller
fetches new program code and reprograms itself while in the
system. This allows for remote programming over a modem link.
A default serial loader (boot loader) program in ROM allows serial
In-System Programming of the Flash memory via the UART without
the need for a loader in the Flash code. For In-Application
Programming, the user program erases and reprograms the Flash
memory by use of standard routines contained in ROM.
This device executes one instruction in 6 clock cycles, hence
providing twice the speed of a conventional 80C51. An OTP
configuration bit gives the user the option to select conventional
12-clock timing.
This device is a Single-Chip 8-Bit Microcontroller manufactured in
advanced CMOS process and is a derivative of the 80C51
microcontroller family. The instruction set is 100% executing and
timing compatible with the 80C51 instruction set.
The device also has four 8-bit I/O ports, three 16-bit timer/event
counters, a multi-source, four-priority-level, nested interrupt
structure, an enhanced UART and on-chip oscillator and timing
circuits.
The added features of the P89C660/662/664/668 makes it a
powerful microcontroller for applications that require pulse width
modulation, high-speed I/O and up/down counting capabilities such
as motor control.
FEA TURES
•80C51 Central Processing Unit
•On-chip Flash program memory with In-System Programming
(ISP) and In-Application Programming (IAP) capability
•Boot ROM contains low level Flash programming routines for
downloading via the UART
•Can be programmed by the end-user application (IAP)
•Parallel programming with 87C51 compatible hardware interface
to programmer
•Six clocks per machine cycle operation (standard)
•12 clocks per machine cycle operation (optional)
•Speed up to 20 MHz with 6 clock cycles per machine cycle
(40 MHz equivalent performance); up to 33 MHz with 12 clocks
per machine cycle
•Fully static operation
•RAM externally expandable to 64 kbytes
•Four interrupt priority levels
•Eight interrupt sources
•Four 8-bit I/O ports
•Full-duplex enhanced UART
– Framing error detection
– Automatic address recognition
•Power control modes
– Clock can be stopped and resumed
– Idle mode
– Power-Down mode
•Programmable clock out
•Second DPTR register
•Asynchronous port reset
•Low EMI (inhibit ALE)
•I
•Programmable Counter Array (PCA)
– PWM
– Capture/compare
•Well-suited for IPMI applications
P89C660/P89C662/P89C664/
2
C serial interface
P89C668
2002 Oct 28 853-2392 29118
2
Philips Semiconductors Product data
TEMPERATURE RANGE (°C)
VOLTAGE
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
SELECTION TABLE
WD
Serial Inter-
faces
C
2
UART
I
CAN
SPI
ADC bits/ch.
I/O Pins
Interrupts
(External)
Program
Security
Default Clock
Rate
Optional
Clock Rate
Reset active
Max.
Freq.
at 6-clk
/ 12-clk
(MHz)
low/high?
Freq.
Range
at 3V
(MHz)
Freq.
Range
at 5V
(MHz)
Type Memory Timers
RAM
ROM
OTP
Flash
P89C668 8K – – 64K 4 √ √ √ √ √ – – – 32 8(2)/4 √ 6-clk 12-clk H 20/33 – 0-20/33
P89C664 2K – – 64K 4 √ √ √ √ √ – – – 32 8(2)/4 √ 6-clk 12-clk H 20/33 – 0-20/33
P89C662 1K – – 32K 4 √ √ √ √ √ – – – 32 8(2)/4 √ 6-clk 12-clk H 20/33 – 0-20/33
P89C660 512B – – 16K 4 √ √ √ √ √ – – – 32 8(2)/4 √ 6-clk 12-clk H 20/33 – 0-20/33
# of Timers
PWM
PCA
ORDERING INFORMATION
DEVICE
MEMORY
FLASH RAM
AND PACKAGE
°
RANGE
6 CLOCK MODE 12 CLOCK
P89C660HBA 16 KB 512 B 0 to +70, PLCC 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT187-2
P89C660HFA 16 KB 512 B –40 to +85, PLCC 4.75–5.25 V 0 to 20 MHz 0 to 33 MHz SOT187-2
P89C660HBBD 16 KB 512 B 0 to +70, LQFP 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT389-1
P89C662HBA 32 KB 1 KB 0 to +70, PLCC 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT187-2
P89C662HFA 32 KB 1 KB –40 to +85, PLCC 4.75–5.25 V 0 to 20 MHz 0 to 33 MHz SOT187-2
P89C662HBBD 32 KB 1 KB 0 to +70, LQFP 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT389-1
P89C662HFBD 32 KB 1 KB –40 to +85, LQFP 4.75–5.25 V 0 to 20 MHz 0 to 33 MHz SOT389-1
P89C664HBA 64 KB 2 KB 0 to +70, PLCC 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT187-2
P89C664HFA 64 KB 2 KB –40 to +85, PLCC 4.75–5.25 V 0 to 20 MHz 0 to 33 MHz SOT187-2
P89C664HBBD 64 KB 2 KB 0 to +70, LQFP 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT389-1
P89C664HFBD 64 KB 2 KB –40 to +85, LQFP 4.75–5.25 V 0 to 20 MHz 0 to 33 MHz SOT389-1
P89C668HBA 64 KB 8 KB 0 to +70, PLCC 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT187-2
P89C668HFA 64 KB 8 KB –40 to +85, PLCC 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT187-2
P89C668HBBD 64 KB 8 KB 0 to +70, LQFP 4.5–5.5 V 0 to 20 MHz 0 to 33 MHz SOT389-1
FREQUENCY (MHz)
DWG #
MODE
2002 Oct 28
3
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
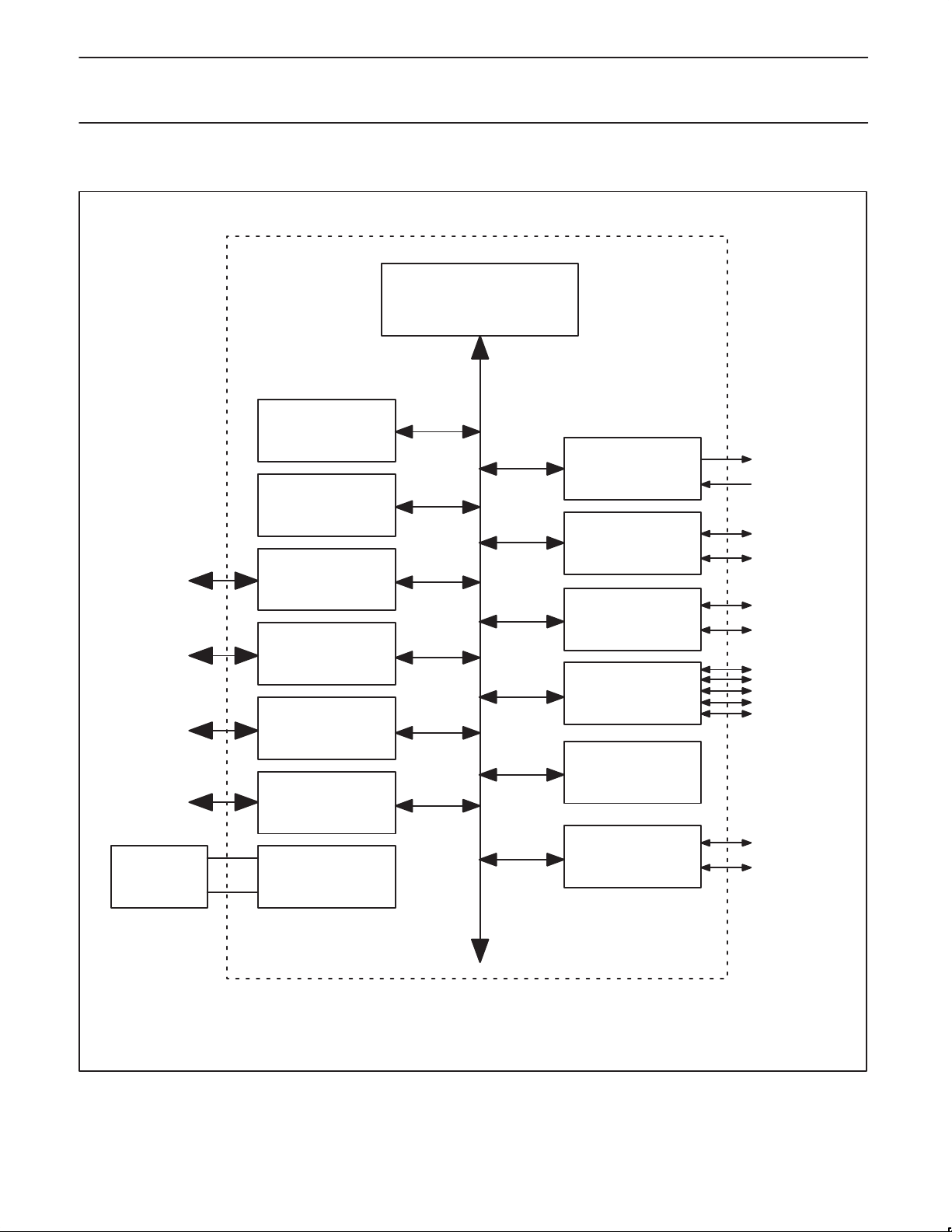
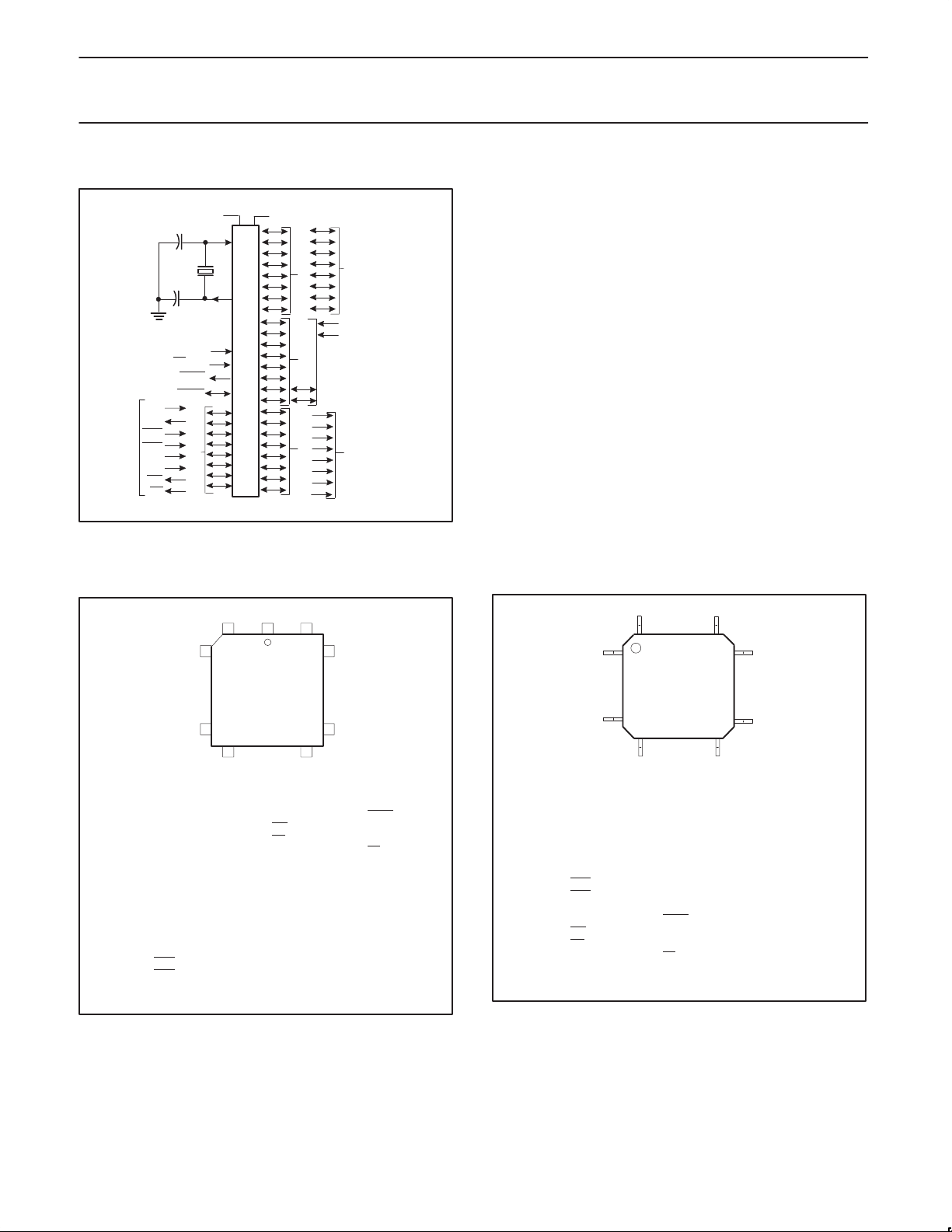
BLOCK DIAGRAM 1
ACCELERATED 80C51 CPU
6-CLK MODE (DEFAULT)
12-CLK MODE (OPTIONAL)
16K / 32K /
64 KBYTE
CODE FLASH
0.5K / 1K / 2K /
8 KBYTE DATA RAM
PORT 3
CONFIGURABLE I/Os
P89C660/P89C662/P89C664/
P89C668
FULL-DUPLEX
ENHANCED UART
TIMER 0
TIMER 1
TIMER 2
RESONATOR
PORT 2
CONFIGURABLE I/Os
PORT 1
CONFIGURABLE I/Os
PORT 0
CONFIGURABLE I/Os
OSCILLATORCRYSTAL OR
PROGRAMMABLE
COUNTER ARRAY
(PCA)
WATCHDOG TIMER
I2C
INTERFACE
su01713
2002 Oct 28
4
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
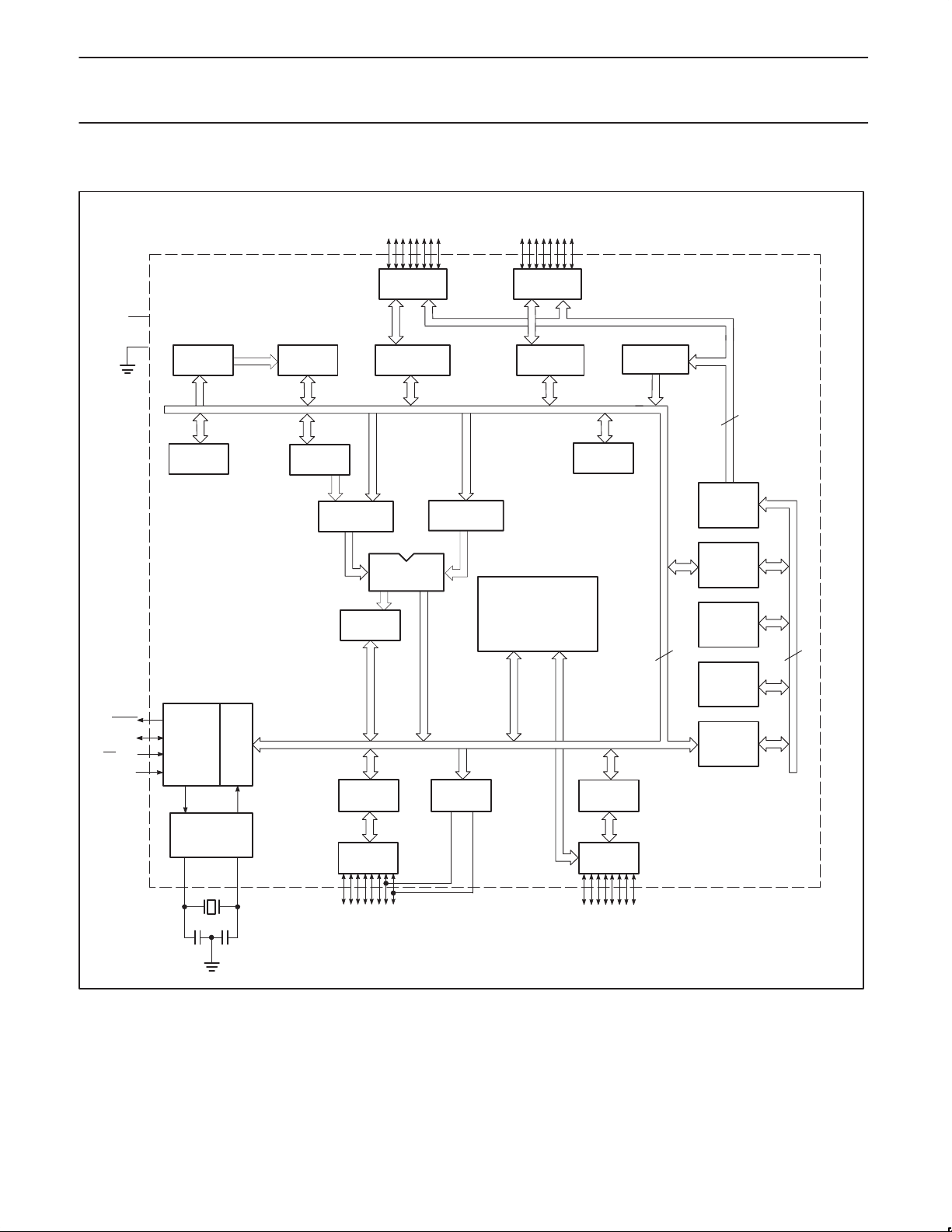
BLOCK DIAGRAM (CPU-ORIENTED)
P0.0–P0.7 P2.0–P2.7
PORT 0
DRIVERS
V
CC
V
SS
RAM ADDR
REGISTER
B
REGISTER
RAM
ACC
TMP2
PORT 0
LATCH
TMP1
P89C660/P89C662/P89C664/
P89C668
PORT 2
DRIVERS
PORT 2
LATCH
STACK
POINTER
FLASH
8
PROGRAM
ADDRESS
REGISTER
PSEN
EA/V
ALE
PP
RST
TIMING
AND
CONTROL
OSCILLATOR
XTAL1 XTAL2
INSTRUCTION
PD
REGISTER
PSW
PORT 1
LATCH
PORT 1
DRIVERS
P1.0–P1.7
ALU
SCL
SDA
I2C
SFRs
TIMERS
P.C.A.
PORT 3
LATCH
PORT 3
DRIVERS
P3.0–P3.7
BUFFER
PC
INCRE-
MENTER
8 16
PROGRAM
COUNTER
DPTR’S
MULTIPLE
su01089
2002 Oct 28
5
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
LOGIC SYMBOL
V
V
SS
CC
XTAL1
ADDRESS AND
EA/V
PSEN
ALE/PROG
RxD
TxD
INT0
INT1
T0
T1
WR
RD
SECONDARY FUNCTIONS
XTAL2
RST
PP
PORT 0
PORT 3
PORT 1PORT 2
SCL
SDA
DATA BUS
T2
T2EX
ADDRESS BUS
SU01090
P89C660/P89C662/P89C664/
P89C668
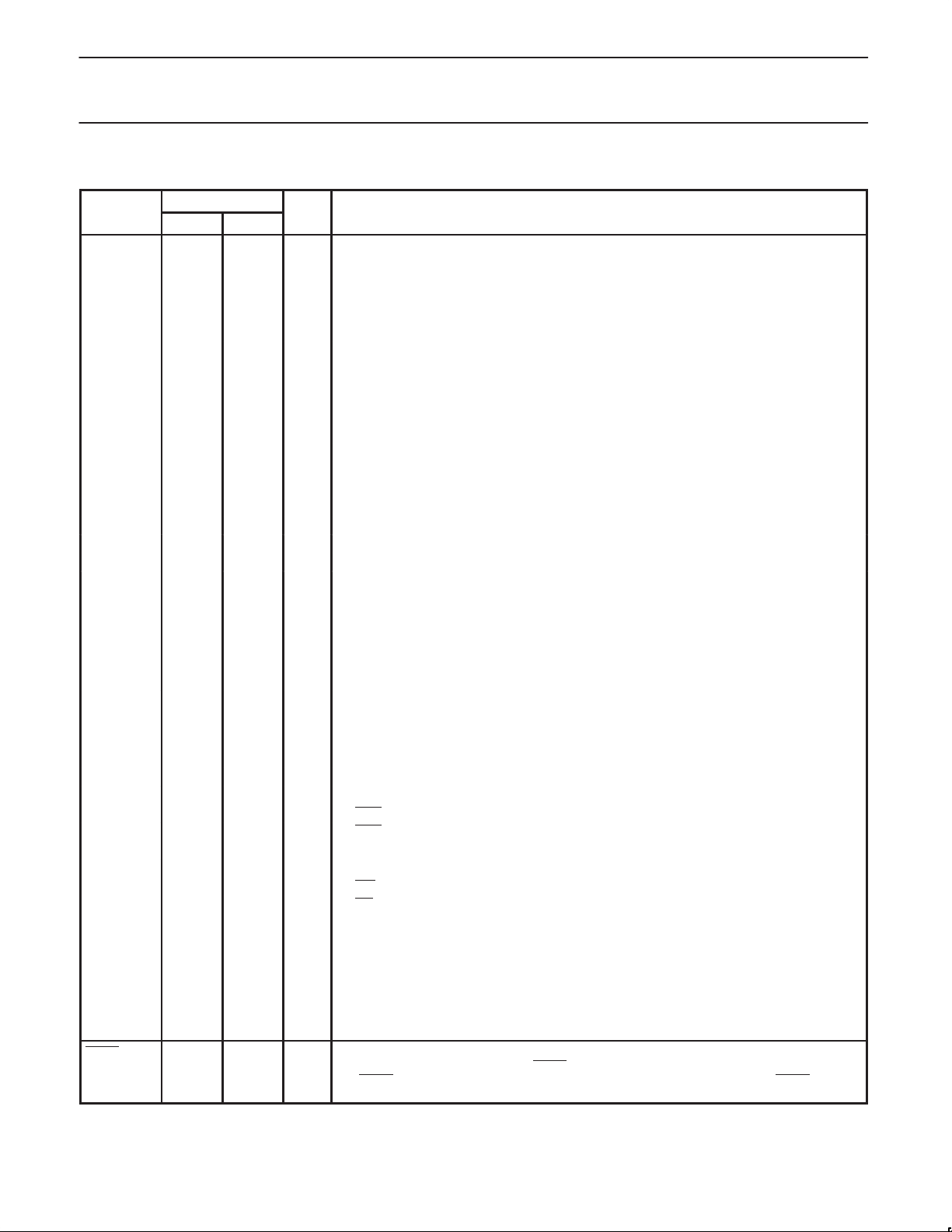
PINNING
Plastic Leaded Chip Carrier
6140
7
PLCC
17
18 28
Pin Function
1 NIC*
2 P1.0/T2
3 P1.1/T2EX
4 P1.2/ECI
5 P1.3/CEX0
6 P1.4/CEX1
7 P1.5/CEX2
8 P1.6/SCL
9 P1.7/SDA
10 RST
11 P3.0/RxD
12 NIC*
13 P3.1/TxD
14 P3.2/INT0
15 P3.3/INT1
* NO INTERNAL CONNECTION
Pin Function
16 P3.4/T0/CEX3
17 P3.5/T1/CEX4
18 P3.6/WR
19 P3.7/RD
20 XTAL2
21 XTAL1
22 V
SS
23 NIC*
24 P2.0/A8
25 P2.1/A9
26 P2.2/A10
27 P2.3/A11
28 P2.4/A12
29 P2.5/A13
30 P2.6/A14
39
29
Pin Function
31 P2.7/A15
32 PSEN
33 ALE
34 NIC*
/V
35 EA
36 P0.7/AD7
37 P0.6/AD6
38 P0.5/AD5
39 P0.4/AD4
40 P0.3/AD3
41 P0.2/AD2
42 P0.1/AD1
43 P0.0/AD0
44 V
PP
CC
SU01091
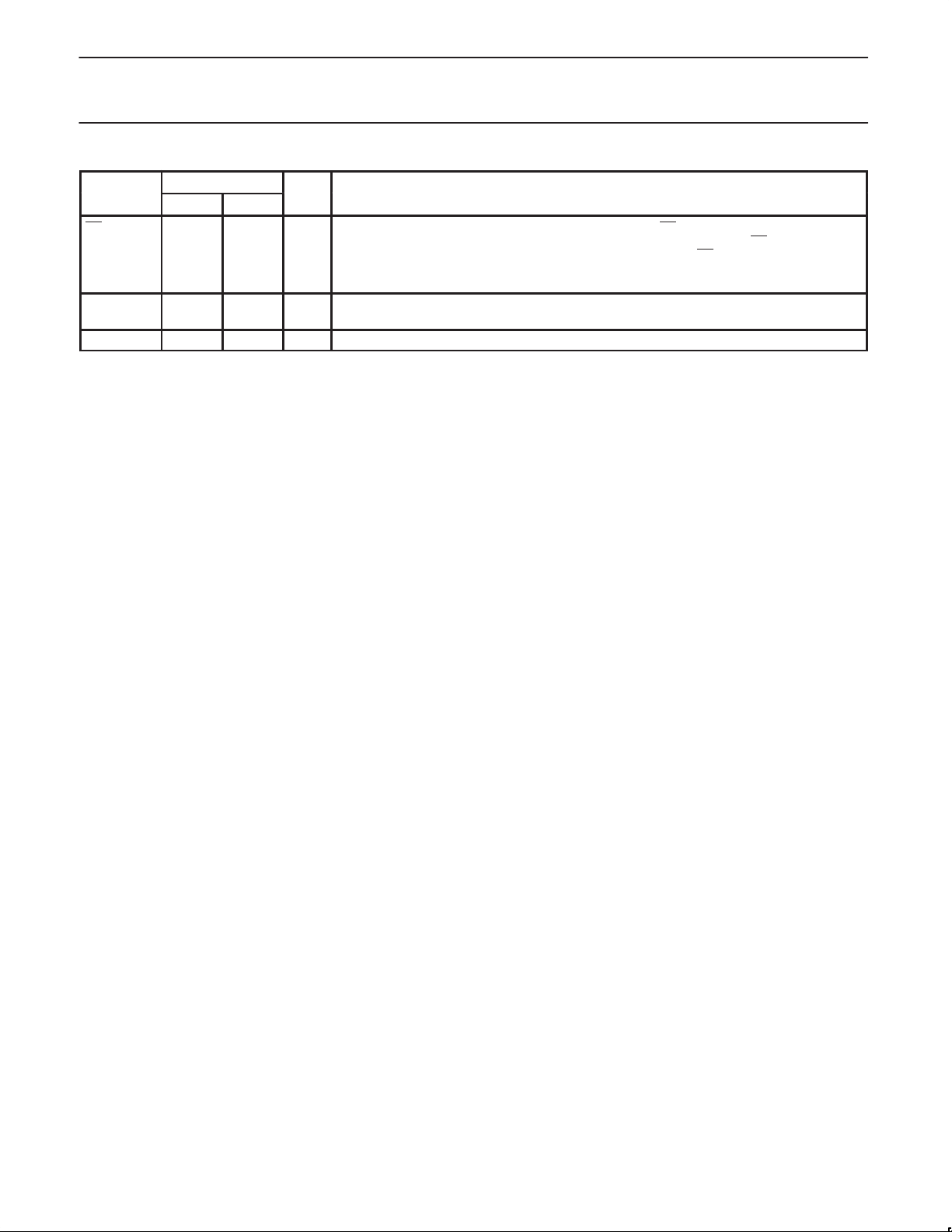
Low Quad Flat Pack
1
11
Pin Function
1 P1.5/CEX2
2 P1.6/SCL
3 P1.7/SDA
4 RST
5 P3.0/RxD
6 NIC*
7 P3.1/TxD
8 P3.2/INT0
9 P3.3/INT1
10 P3.4/T0/CEX3
11 P3.5/T1/CEX4
12 P3.6/WR
13 P3.7/RD
14 XTAL2
15 XTAL1
* NO INTERNAL CONNECTION
44 34
LQFP
12 22
Pin Function
16 V
SS
17 NIC*
18 P2.0/A8
19 P2.1/A9
20 P2.2/A10
21 P2.3/A11
22 P2.4/A12
23 P2.5/A13
24 P2.6/A14
25 P2.7/A15
26 PSEN
27 ALE
28 NIC*
/V
29 EA
30 P0.7/AD7
PP
33
23
Pin Function
31 P0.6/AD6
32 P0.5/AD5
33 P0.4/AD4
34 P0.3/AD3
35 P0.2/AD2
36 P0.1/AD1
37 P0.0/AD0
38 V
CC
39 NIC*
40 P1.0/T2
41 P1.1/T2EX
42 P1.2/ECI
43 P1.3/CEX0
44 P1.4/CEX1
SU01401
2002 Oct 28
6
Philips Semiconductors Product data
MNEMONIC
TYPE
NAME AND FUNCTION
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
PIN DESCRIPTIONS
PIN NUMBER
PLCC LQFP
V
SS
V
CC
P0.0–0.7 43–36 37–30 I/O Port 0: Port 0 is an open-drain, bidirectional I/O port. Port 0 pins that have 1s written to them
P1.0–P1.7 2–9 40–44,
P2.0–P2.7 24–31 18–25 I/O Port 2: Port 2 is an 8-bit bidirectional I/O port with internal pull-ups. Port 2 pins that have 1s
P3.0–P3.7 11,
RST 10 4 I Reset: A high on this pin for two machine cycles while the oscillator is running, resets the
ALE 33 27 O Address Latch Enable: Output pulse for latching the low byte of the address during an access
PSEN 32 26 O Program Store Enable: The read strobe to external program memory. When executing code
22 16 I Ground: 0 V reference.
44 38 I Power Supply: This is the power supply voltage for normal, idle, and power-down operation.
float and can be used as high-impedance inputs. Port 0 is also the multiplexed low-order
address and data bus during accesses to external program and data m emory. In this
application, it uses strong internal pull-ups when emitting 1s.
1–3
2 40 I/O T2 (P1.0): Timer/Counter 2 external count input/Clockout (see Programmable Clock-Out)
3 41 I T2EX (P1.1): Timer/Counter 2 Reload/Capture/Direction Control
4 42 I ECI (P1.2): External Clock Input to the PCA
5 43 I/O CEX0 (P1.3): Capture/Compare External I/O for PCA module 0
6 44 I/O CEX1 (P1.4): Capture/Compare External I/O for PCA module 1
7 1 I/O CEX2 (P1.5): Capture/Compare External I/O for PCA module 2
8 2 I/O SCL (P1.6): I2C bus clock line (open drain)
9 3 I/O SDA (P1.7): I2C bus data line (open drain)
5, 7–13 I/O Port 3: Port 3 is an 8-bit bidirectional I/O port with internal pull-ups. Port 3 pins that have 1s
13–19
11 5 I RxD (P3.0): Serial input port
13 7 O TxD (P3.1): Serial output port
14 8 I INT0 (P3.2): External interrupt
15 9 I INT1 (P3.3): External interrupt
16 10 I CEX3/T0 (P3.4): Timer 0 external input; Capture/Compare External I/O for PCA module 3
17 11 I CEX4/T1 (P3.5): Timer 1 external input; Capture/Compare External I/O for PCA module 4
18 12 O WR (P3.6): External data memory write strobe
19 13 O RD (P3.7): External data memory read strobe
I/O Port 1: Port 1 is an 8-bit bidirectional I/O port with internal pull-ups on all pins except P1.6 and
P1.7 which are open drain. Port 1 pins that have 1s written to them are pulled high by the
internal pull-ups and can be used as inputs. As inputs, port 1 pins that are externally pulled low
will source current because of the internal pull-ups. (See DC Electrical Characteristics: I
Alternate functions for P89C660/662/664/668 Port 1 include:
written to them are pulled high by the internal pull-ups and can be used as inputs. As inputs,
port 2 pins that are externally being pulled low will source current because of the internal
pull-ups. (See DC Electrical Characteristics: I
during fetches from external program memory and during accesses to external data memory
that use 16-bit addresses (MOVX @DPTR). In this application, it uses strong internal pull-ups
when emitting 1s. During accesses to external data memory that use 8-bit addresses (MOV
@Ri), port 2 emits the contents of the P2 special function register.
written to them are pulled high by the internal pull-ups and can be used as inputs. As inputs,
port 3 pins that are externally being pulled low will source current because of the pull-ups. (See
DC Electrical Characteristics: I
P89C660/662/664/668, as listed below:
device. An internal resistor to V
V
.
CC
to external memory. In normal operation, ALE is emitted twice every machine cycle, and can be
used for external timing or clocking. Note that one ALE pulse is skipped during each access to
external data memory. ALE can be disabled by setting SFR auxiliary.0. With this bit set, ALE
will be active only during a MOVX instruction.
from the external program memory, PSEN
two PSEN
activated during fetches from internal program memory.
activations are skipped during each access to external data memory. PSEN is not
). Port 3 also serves the special features of the
IL
permits a power-on reset using only an external capacitor to
SS
). Port 2 emits the high-order address byte
IL
is activated twice each machine cycle, except that
).
IL
2002 Oct 28
7
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
MNEMONIC NAME AND FUNCTIONTYPE
MNEMONIC NAME AND FUNCTIONTYPE
EA/V
PP
XTAL1 21 15 I Crystal 1: Input to the inverting oscillator amplifier and input to the internal clock generator
XTAL2 20 14 O Crystal 2: Output from the inverting oscillator amplifier.
NOTE:
To avoid “latch-up” effect at power-on, the voltage on any pin (other than V
PIN NUMBER
LQFPPLCC
35 29 I External Access Enable/Programming Supply Voltage: EA must be externally held low to
enable the device to fetch code from external program memory locations. If EA
device executes from internal program memory. The value on the EA
is released and any subsequent changes have no effect. This pin also receives the
programming supply voltage (V
circuits.
PP
) must not be higher than VCC + 0.5 V or less than VSS – 0.5 V.
PP
P89C660/P89C662/P89C664/
P89C668
is held high, the
pin is latched when RST
) during Flash programming.
2002 Oct 28
8
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
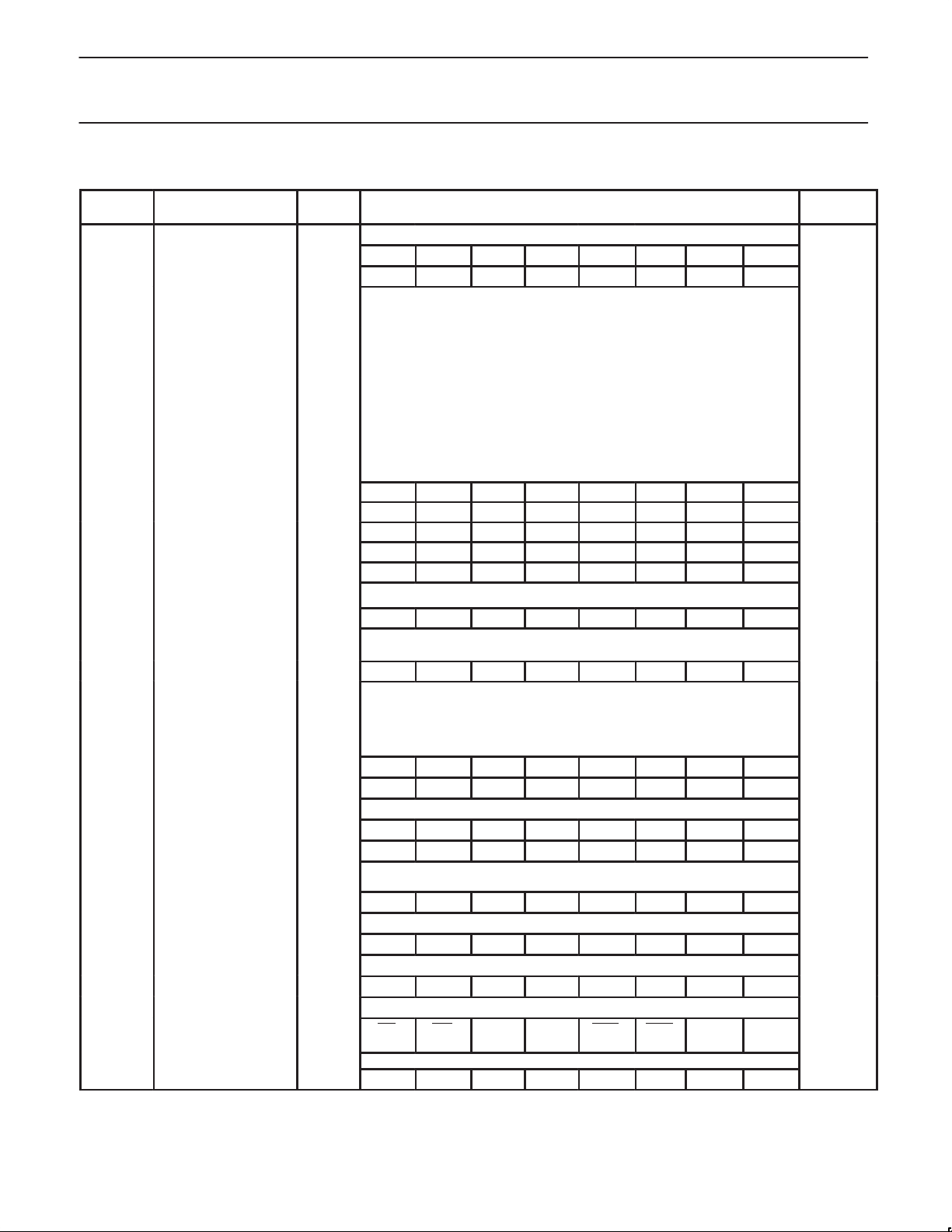
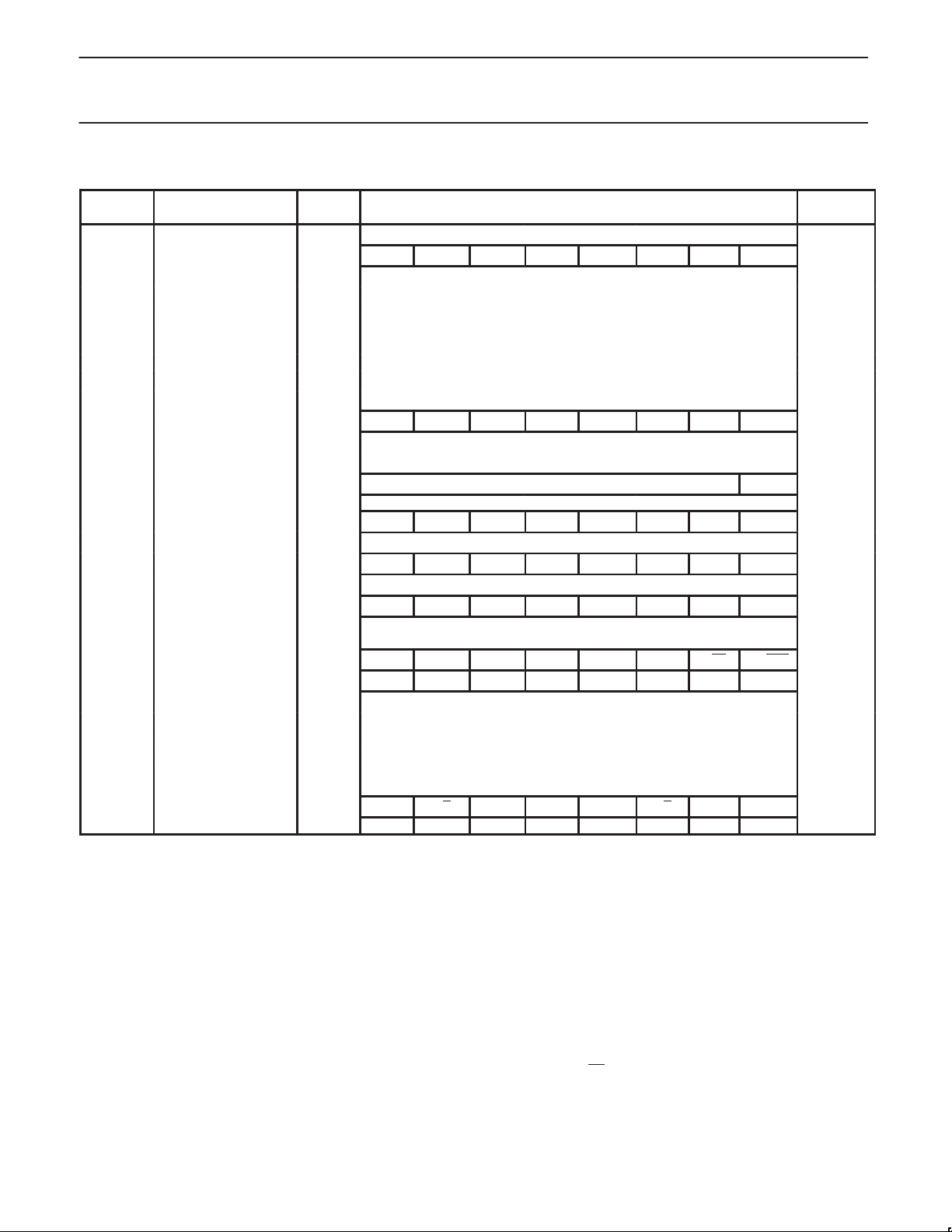
Table 1. Special Function Registers
SYMBOL DESCRIPTION
ACC* Accumulator E0H E7 E6 E5 E4 E3 E2 E1 E0 00H
AUXR# Auxiliary 8EH – – – – – –
AUXR1# Auxiliary 1 A2H – –
B* B register F0H F7 F6 F5 F4 F3 F2 F1 F0 00H
CCAP0H# Module 0 Capture High FAH xxxxxxxxB
CCAP1H# Module 1 Capture High FBH xxxxxxxxB
CCAP2H# Module 2 Capture High FCH xxxxxxxxB
CCAP3H# Module 3 Capture High FDH xxxxxxxxB
CCAP4H# Module 4 Capture High FEH xxxxxxxxB
CCAP0L# Module 0 Capture Low EAH xxxxxxxxB
CCAP1L# Module 1 Capture Low EBH xxxxxxxxB
CCAP2L# Module 2 Capture Low ECH xxxxxxxxB
CCAP3L# Module 3 Capture Low EDH xxxxxxxxB
CCAP4L# Module 4 Capture Low EEH xxxxxxxxB
CCAPM0# Module 0 Mode C2H – ECOM CAPP CAPN MAT TOG PWM ECCF x0000000B
CCAPM1# Module 1 Mode C3H – ECOM CAPP CAPN MAT TOG PWM ECCF x0000000B
CCAPM2# Module 2 Mode C4H – ECOM CAPP CAPN MAT TOG PWM ECCF x0000000B
CCAPM3# Module 3 Mode C5H – ECOM CAPP CAPN MAT TOG PWM ECCF x0000000B
CCAPM4# Module 4 Mode C6H – ECOM CAPP CAPN MAT TOG PWM ECCF x0000000B
CCON*# PCA Counter Control C0H CF CR – CCF4 CCF3 CCF2 CCF1 CCF0 00x00000B
CH# PCA Counter High F9H 00H
CL# PCA Counter Low E9H 00H
CMOD# PCA Counter Mode C1H CIDL WDTE – – – CPS1 CPS0 ECF 00xxx000B
DPTR: Data Pointer (2 bytes)
DPH Data Pointer High 83H 00H
DPL Data Pointer Low 82H 00H
IEN0* Interrupt Enable 0 A8H EA EC ES1 ES0 ET1 EX1 ET0 EX0 00H
IEN1* Interrupt Enable 1 E8 – – – – – – – ET2 xxxxxxx0B
IP* Interrupt Priority B8H PT2 PPC PS1 PS0 PT1 PX1 PT0 PX0 x0000000B
IPH# Interrupt Priority High B7H PT2H PPCH PS1H PS0H PT1H PX1H PT0H PX0H x0000000B
DIRECT
ADDRESS
BIT ADDRESS, SYMBOL, OR ALTERNATIVE PORT FUNCTION
MSB LSB
EXTRAM
ENBOOT
C7 C6 C5 C4 C3 C2 C1 C0
AF AE AD AC AB AA A9 A8
BF BE BD BC BB BA B9 B8
– GF2 0 – DPS xxxxx0x0B
AO xxxxxx10B
RESET
VALUE
87 86 85 84 83 82 81 80
P0* Port 0 80H AD7 AD6 AD5 AD4 AD3 AD2 AD1 AD0 FFH
97 96 95 94 93 92 91 90
P1* Port 1 90H SDA SCL CEX2 CEX1 CEX0 ECI T2EX T2 FFH
A7 A6 A5 A4 A3 A2 A1 A0
P2* Port 2 A0H AD15 AD14 AD13 AD12 AD11 AD10 AD9 AD8 FFH
B7 B6 B5 B4 B3 B2 B1 B0
P3* Port 3 B0H RD WR T1/
PCON#1Power Control 87H SMOD1 SMOD0 – POF GF1 GF0 PD IDL 00xxx000B
* SFRs are bit addressable.
# SFRs are modified from or added to the 80C51 SFRs.
– Reserved bits.
1. Reset value depends on reset source.
2002 Oct 28
CEX4
9
T0/
CEX3
INT1 INT0 TxD RxD FFH
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
Table 1 Special Function Registers (Continued)
SYMBOL DESCRIPTION
PSW* Program Status Word D0H CY AC F0 RS1 RS0 OV F1 P 00000000B
RCAP2H# Timer 2 Capture High CBH 00H
RCAP2L# Timer 2 Capture Low CAH 00H
SADDR# Slave Address A9H 00H
SADEN# Slave Address Mask B9H 00H
S0BUF Serial Data Buffer 99H xxxxxxxxB
S0CON* Serial Control 98H
SP Stack Pointer 81H 07H
S1DAT# Serial 1 Data DAH 00H
S1ADR# Serial 1 Address DBH SLAVE ADDRESS GC 00H
S1STA# Serial 1 Status D9H SC4 SC3 SC2 SC1 SC0 0 0 0 F8H
S1CON*# Serial 1 Control D8H CR2 ENS1 STA STO SI AA CR1 CR0 00000000B
TCON* Timer Control 88H TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0 00H
DIRECT
ADDRESS
BIT ADDRESS, SYMBOL, OR ALTERNATIVE PORT FUNCTION
MSB LSB
D7 D6 D5 D4 D3 D2 D1 D0
9F 9E 9D 9C 9B 9A 99 98
SM0/FE
DF DE DD DC DB DA D9 D8
8F 8E 8D 8C 8B 8A 89 88
SM1 SM2 REN TB8 RB8 TI RI 00H
RESET
VALUE
CF CE CD CC CB CA C9 C8
T2CON* Timer 2 Control C8H TF2 EXF2 RCLK TCLK EXEN2 TR2 C/T2 CP/RL2 00H
T2MOD# Timer 2 Mode Control C9H – – – – – – T2OE DCEN xxxxxx00B
TH0 T imer High 0 8CH 00H
TH1 T imer High 1 8DH 00H
TH2# Timer High 2 CDH 00H
TL0 Timer Low 0 8AH 00H
TL1 Timer Low 1 8BH 00H
TL2# T imer Low 2 CCH 00H
TMOD Timer Mode 89H GATE C/T M1 M0 GATE C/T M1 M0 00H
WDTRST Watchdog Timer Reset A6H
* SFRs are bit addressable.
# SFRs are modified from or added to the 80C51 SFRs.
– Reserved bits.
OSCILLA T OR CHARACTERISTICS
XTAL1 and XTAL2 are the input and output, respectively, of an
inverting amplifier. The pins can be configured for use as an
on-chip oscillator.
To drive the device from an external clock source, XTAL1 should be
driven while XTAL2 is left unconnected. Minimum and maximum
high and low times specified in the data sheet must be observed.
This device is configured at the factory to operate using 6 clock
periods per machine cycle, referred to in this datasheet as “6 clock
mode”. (This yields performance equivalent to twice that of standard
80C51 family devices). It may be optionally configured on
commercially-available EPROM programming equipment to operate
at 12 clock periods per machine cycle, referred to in this datasheet
as “12 clock mode”. Once 12 clock mode has been configured, it
cannot be changed back to 6 clock mode.
RESET
A reset is accomplished by holding the RST pin high for at least two
machine cycles (12 oscillator periods in 6 clock mode, or 24
oscillator periods in 12 clock mode), while the oscillator is running.
To insure a good power-on reset, the RST pin must be high long
enough to allow the oscillator time to start up (normally a few
milliseconds) plus two machine cycles. At power-on, the voltage on
V
and RST must come up at the same time for a proper start-up.
CC
Ports 1, 2, and 3 will asynchronously be driven to their reset
condition when a voltage above V
The value on the EA
no further effect.
pin is latched when RST is deasserted and has
(min.) is applied to RST.
IH1
2002 Oct 28
10
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
LOW POWER MODES
Stop Clock Mode
The static design enables the clock speed to be reduced down to
0 MHz (stopped). When the oscillator is stopped, the RAM and
Special Function Registers retain their values. This mode allows
step-by-step utilization and reduces system power consumption by
lowering the clock frequency down to any value. For lowest power
consumption the Power-Down mode is suggested.
Idle Mode
In the idle mode (see Table 2), the CPU puts itself to sleep while all
of the on-chip peripherals stay active. The instruction to invoke the
idle mode is the last instruction executed in the normal operating
mode before the idle mode is activated. The CPU contents, the
on-chip RAM, and all of the special function registers remain intact
during this mode. The idle mode can be terminated either by any
enabled interrupt (at which time the process is picked up at the
interrupt service routine and continued), or by a hardware reset
which starts the processor in the same manner as a power-on reset.
Power-Down Mode
To save even more power, a Power-Down mode (see Table 2) can
be invoked by software. In this mode, the oscillator is stopped and
the instruction that invoked Power-Down is the last instruction
executed. The on-chip RAM and Special Function Registers retain
their values down to 2.0 V and care must be taken to return V
the minimum specified operating voltages before the Power-Down
mode is terminated.
Either a hardware reset or external interrupt can be used to exit from
Power-Down. Reset redefines all the SFRs but does not change the
on-chip RAM. An external interrupt allows both the SFRs and the
on-chip RAM to retain their values.
To properly terminate Power-Down the reset or external interrupt
should not be executed before V
operating level and must be held active long enough for the
oscillator to restart and stabilize (normally less than 10ms).
With an external interrupt, INT0 and INT1 must be enabled and
configured as level-sensitive. Holding the pin low restarts the
oscillator, but bringing the pin back high completes the exit. Once the
interrupt is serviced, the next instruction to be executed after RETI
will be the one following the instruction that put the device into
Power-Down.
is restored to its normal
CC
POWER-ON FLAG
The Power-On Flag (POF) is set by on-chip circuitry when the V
level on the P89C660/662/664/668 rises from 0 to 5 V. The POF bit
can be set or cleared by software allowing a user to determine if
the reset is the result of a power-on or a warm start after
Power-Down. The V
remain unaffected by the V
level must remain above 3 V for the POF to
CC
CC
level.
CC
to
CC
P89C660/P89C662/P89C664/
P89C668
Design Consideration
When the idle mode is terminated by a hardware reset, the device
normally resumes program execution, from where it left off, up to
two machine cycles before the internal reset algorithm takes control.
On-chip hardware inhibits access to internal RAM in this event,
however, access to the port pins is not inhibited. To eliminate the
possibility of an unexpected write when the idle mode is terminated
by reset, the instruction following the one that invokes the idle mode
should not be one that writes to a port pin or to external memory.
ONCE Mode
The ONCE (“On-Circuit Emulation”) mode facilitates testing and
debugging of systems without the device having to be removed from
the circuit. The ONCE mode is invoked by:
1. Pulling ALE low while the device is in reset and PSEN
2. Holding ALE low as RST is deactivated.
While the device is in ONCE mode, the Port 0 pins go into a float
state, and the other port pins and ALE and PSEN
high. The oscillator circuit remains active. While the device is in this
mode, an emulator or test CPU can be used to drive the circuit.
Normal operation is restored when a normal reset is applied.
Programmable Clock-Out
A 50% duty cycle clock can be programmed to come out on P1.0.
This pin, besides being a regular I/O pin, has two alternate
functions. It can be programmed:
1. to input the external clock for Timer/Counter 2, or
2. to output a 50% duty cycle clock ranging from 122 Hz to 8 MHz
at a 16 MHz operating frequency (61 Hz to 4 MHz in 12 clock
mode).
To configure the Timer/Counter 2 as a clock generator, bit C/T
T2CON) must be cleared and bit T20E in T2MOD must be set. Bit
TR2 (T2CON.2) also must be set to start the timer.
The Clock-Out frequency depends on the oscillator frequency and
the reload value of Timer 2 capture registers (RCAP2H, RCAP2L)
as shown in this equation:
Oscillator Frequency
n (65536 ǒ RCAP2H,RCAP2L)
n = 2 in 6 clock mode
Where (RCAP2H,RCAP2L) = the content of RCAP2H and RCAP2L
taken as a 16-bit unsigned integer.
In the Clock-Out mode Timer 2 roll-overs will not generate an
interrupt. This is similar to when it is used as a baud-rate generator.
It is possible to use Timer 2 as a baud-rate generator and a clock
generator simultaneously. Note, however, that the baud-rate and the
Clock-Out frequency will be the same.
4 in 12 clock mode
is high;
are weakly pulled
2 (in
Table 2. External Pin Status During Idle and Power-Down mode
MODE PROGRAM MEMORY ALE PSEN PORT 0 PORT 1 PORT 2 PORT 3
Idle Internal 1 1 Data Data Data Data
Idle External 1 1 Float Data Address Data
Power-Down Internal 0 0 Data Data Data Data
Power-Down External 0 0 Float Data Data Data
2002 Oct 28
11

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
I2C SERIAL COMMUNICATION — SIO1
The I2C serial port is identical to the I2C serial port on the 8XC554,
8XC654, and 8XC652 devices.
Note that the P89C660/662/664/668 I
functions to port pins P1.6 and P1.7. Because of this, P1.6 and
P1.7 on these parts do not have a pull-up structure as found on the
80C51. Therefore P1.6 and P1.7 have open drain outputs on the
P89C660/662/664/668.
2
The I
C bus uses two wires (SDA and SCL) to transfer information
between devices connected to the bus. The main features of the bus
are:
– Bidirectional data transfer between masters and slaves
– Multimaster bus (no central master)
– Arbitration between simultaneously transmitting masters without
corruption of serial data on the bus
– Serial clock synchronization allows devices with dif ferent bit rates
to communicate via one serial bus
– Serial clock synchronization can be used as a handshake
mechanism to suspend and resume serial transfer
2
C bus may be used for test and diagnostic purposes
– The I
The output latches of P1.6 and P1.7 must be set to logic 1 in order
to enable SIO1.
2
The P89C66x on-chip I
meets the I
(other than the low-speed mode) from and to the I
logic handles bytes transfer autonomously. It also keeps track of
serial transfers, and a status register (S1STA) reflects the status of
SIO1 and the I
The CPU interfaces to the I2C logic via the following four special
function registers: S1CON (SIO1 control register), S1STA (SIO1
status register), S1DAT (SIO1 data register), and S1ADR (SIO1
slave address register). The SIO1 logic interfaces to the external I
bus via two port 1 pins: P1.6/SCL (serial clock line) and P1.7/SDA
(serial data line).
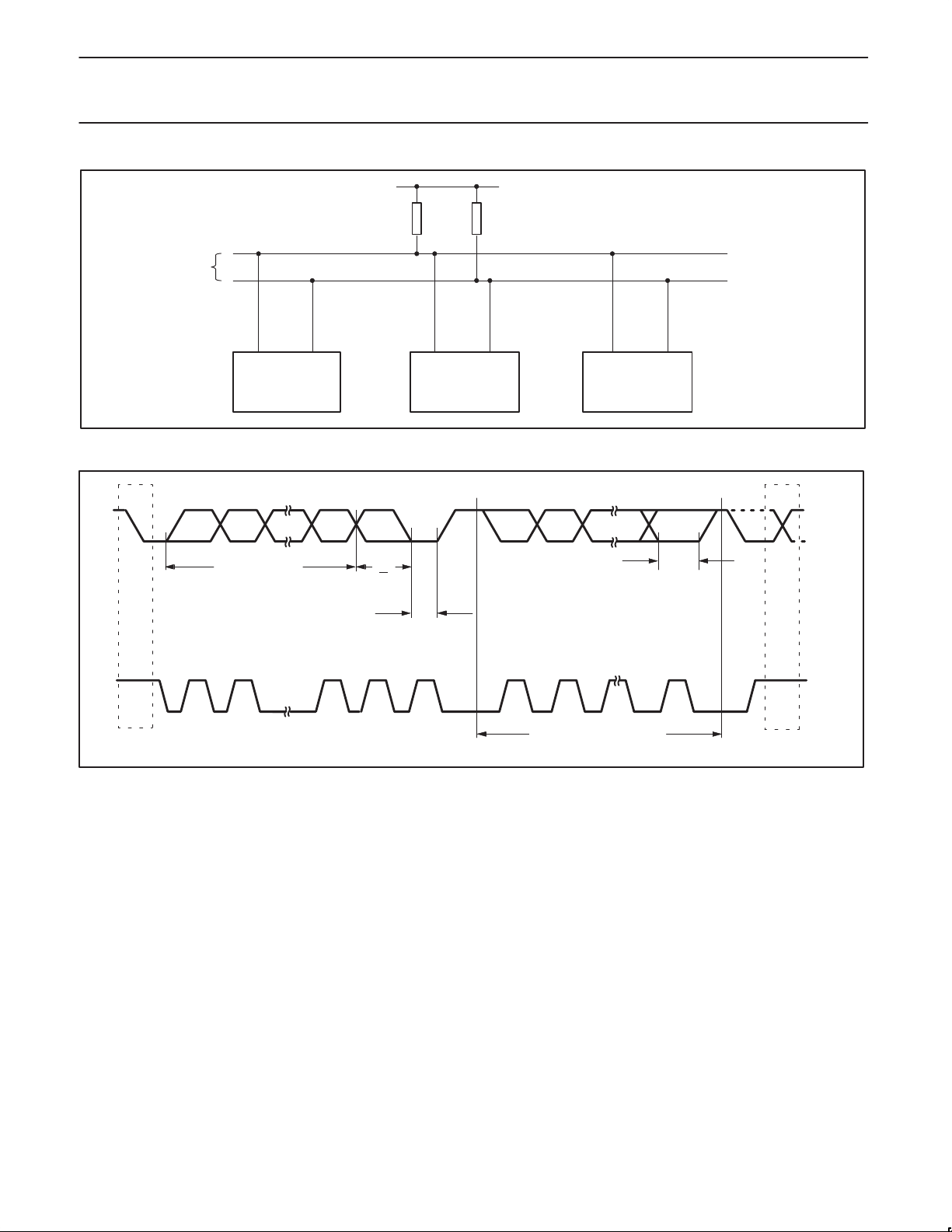
A typical I
how a data transfer is accomplished on the bus. Depending on the
state of the direction bit (R/W), two types of data transfers are
possible on the I
1. Data transfer from a master transmitter to a slave receiver. The
2. Data transfer from a slave transmitter to a master receiver. The
2
C bus specification and supports all transfer modes
2
C bus.
2
C bus configuration is shown in Figure 1. Figure 2 shows
first byte transmitted by the master is the slave address. Next
follows a number of data bytes. The slave returns an
acknowledge bit after each received byte.
first byte (the slave address) is transmitted by the master. The
slave then returns an acknowledge bit. Next follows the data
bytes transmitted by the slave to the master. The master returns
an acknowledge bit after all received bytes other than the last
byte. At the end of the last received byte, a “not acknowledge” is
returned.
C logic provides a serial interface that
2
C bus:
2
C pins are alternate
2
C bus. The SIO1
2
C
P89C660/P89C662/P89C664/
P89C668
condition or with a repeated STAR T condition. Since a repeated
STAR T condition is also the beginning of the next serial transfer, the
2
I
C bus will not be released.
Modes of Operation
The on-chip SIO1 logic may operate in the following four modes:
1. Master Transmitter mode:
Serial data output through P1.7/SDA while P1.6/SCL outputs the
serial clock. The first transmitted byte contains the slave address
of the receiving device (7 bits) and the data direction bit. In this
mode the data direction bit (R/W
a “W” is transmitted. Thus the first byte transmitted is SLA+W.
Serial data is transmitted 8 bits at a time. After each byte is
transmitted, an acknowledge bit is received. STAR T and STOP
conditions are output to indicate the beginning and the end of a
serial transfer.
2. Master Receiver Mode:
The first transmitted byte contains the slave address of the
transmitting device (7 bits) and the data direction bit. In this
mode the data direction bit (R/W
an “R” is transmitted. Thus the first byte transmitted is SLA+R.
Serial data is received via P1.7/SDA while P1.6/SCL outputs the
serial clock. Serial data is received 8 bits at a time. After each
byte is received, an acknowledge bit is transmitted. STAR T and
STOP conditions are output to indicate the beginning and end of
a serial transfer.
3. Slave Receiver mode:
Serial data and the serial clock are received through P1.7/SDA
and P1.6/SCL. After each byte is received, an acknowledge bit is
transmitted. ST ART and STOP conditions are recognized as the
beginning and end of a serial transfer. Address recognition is
performed by hardware after reception of the slave address and
direction bit.
4. Slave Transmitter mode:
The first byte is received and handled as in the Slave Receiver
mode. However, in this mode, the direction bit will indicate that
the transfer direction is reversed. Serial data is transmitted via
P1.7/SDA while the serial clock is input through P1.6/SCL.
STAR T and ST OP conditions are recognized as the beginning
and end of a serial transfer.
In a given application, SIO1 may operate as a master and as a
slave. In the Slave mode, the SIO1 hardware looks for its own slave
address and the general call address. If one of these addresses is
detected, an interrupt is requested. When the microcontroller wishes
to become the bus master, the hardware waits until the bus is free
before the Master mode is entered so that a possible slave action is
not interrupted. If bus arbitration is lost in the Master mode, SIO1
switches to the Slave mode immediately and can detect its own
slave address in the same serial transfer.
) will be logic 0, and we say that
) will be logic 1, and we say that
The master device generates all of the serial clock pulses and the
START and STOP conditions. A transfer is ended with a STOP
2002 Oct 28
12
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
R
P
SDA
I
2
C bus
MSB
P1.7/SDA P1.6/SCL
P89C66x
SLAVE ADDRESS
R
P
OTHER DEVICE WITH
2
I
C INTERFACE
Figure 1. Typical I2C Bus Configuration
R/W
DIRECTION
BIT
P89C660/P89C662/P89C664/
P89C668
V
DD
SDA
SCL
OTHER DEVICE WITH
I2C INTERFACE
SU01710
STOP
CONDITION
REPEATED
START
CONDITION
ACKNOWLEDGMENT
SIGNAL FROM RECEIVER
ACKNOWLEDGMENT
SIGNAL FROM RECEIVER
SCL
CONDITION
S
START
1 2 7 8 9 1 2 3–8
ACK
Figure 2. Data Transfer on the I2C Bus
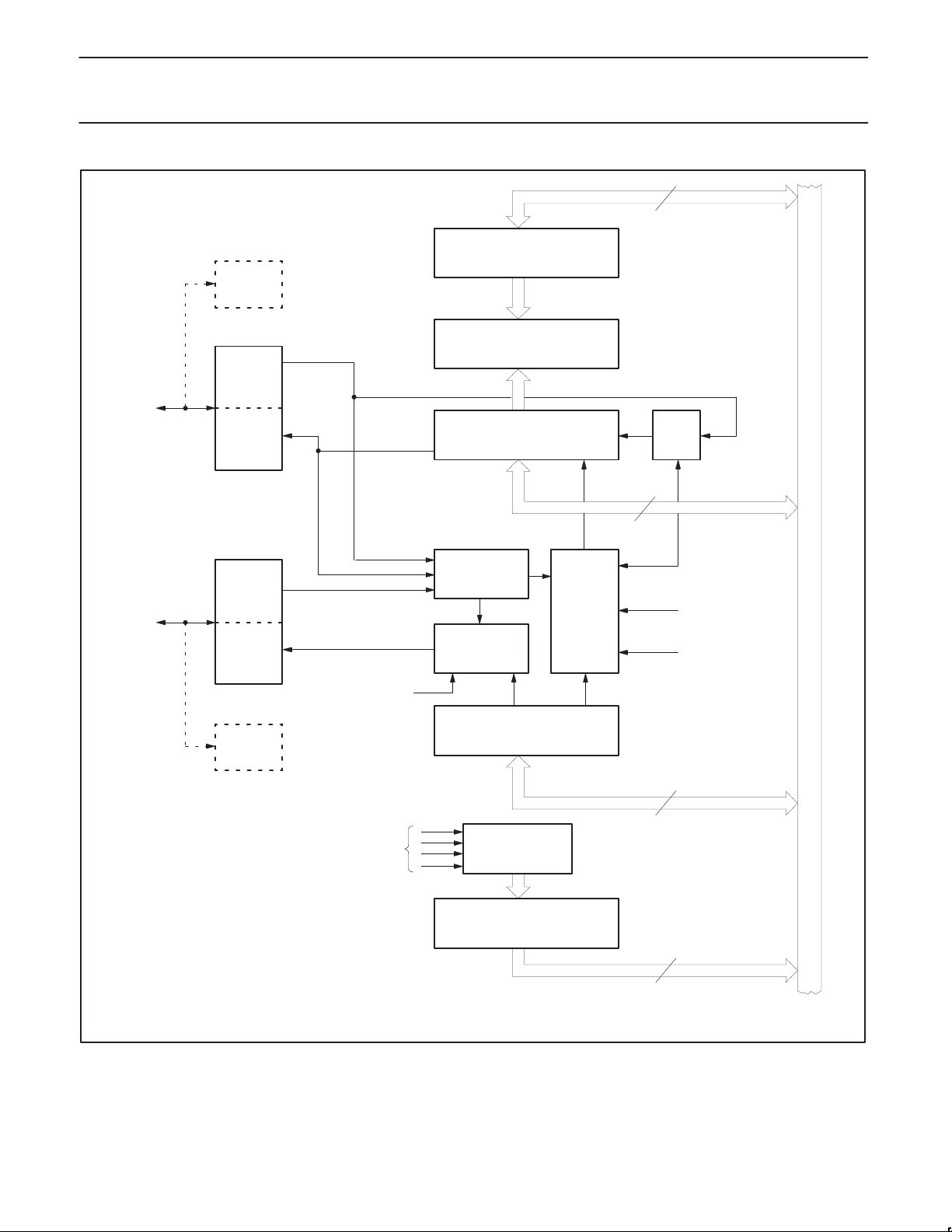
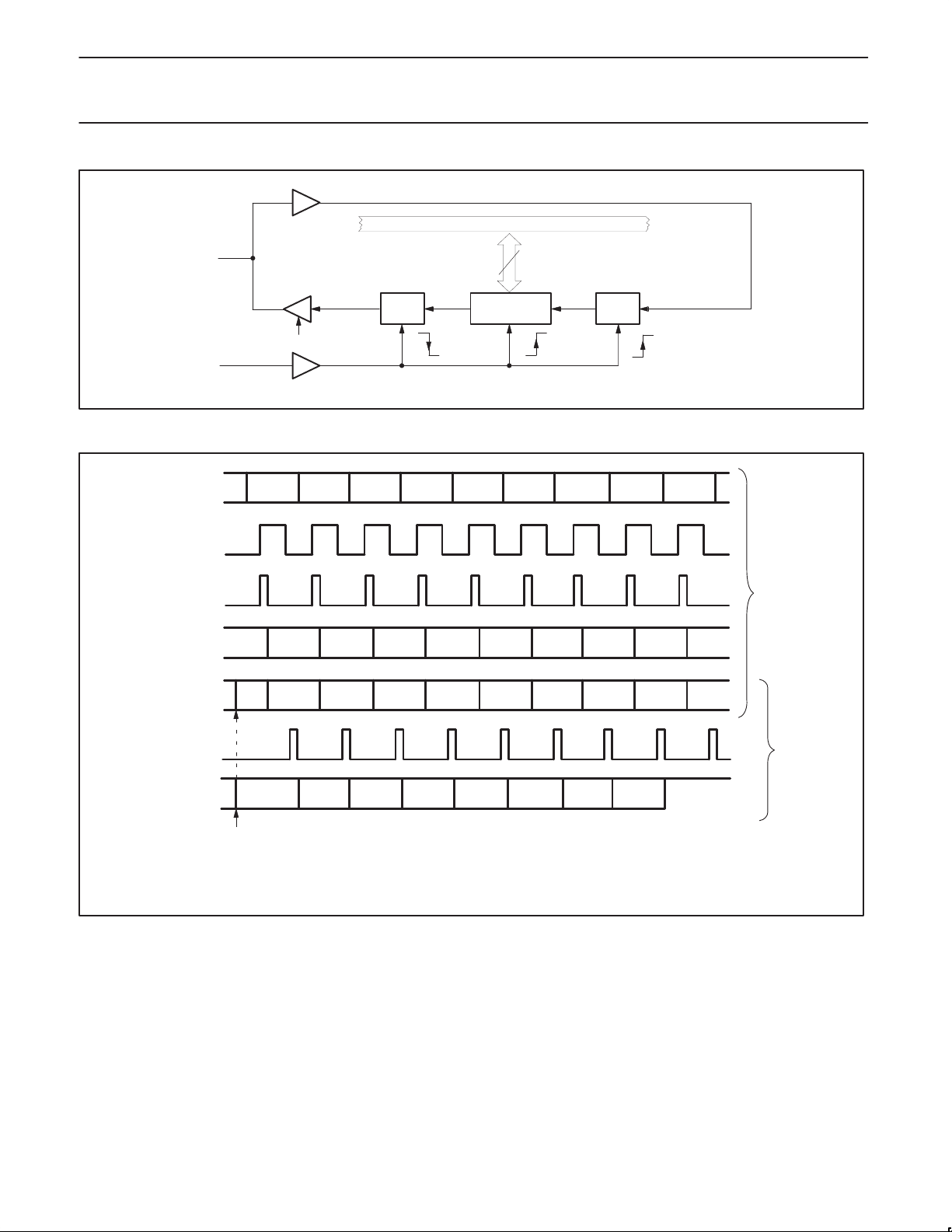
SIO1 Implementation and Operation
Figure 3 shows how the on-chip I2C bus interface is implemented,
and the following text describes the individual blocks.
Input Filters and Output Stages
The input filters have I
is less than 1.5 V, the input logic level is interpreted as 0; if the input
voltage is greater than 3.0 V , the input logic level is interpreted as 1.
Input signals are synchronized with the internal clock (f
spikes shorter than three oscillator periods are filtered out.
The output stages consist of open drain transistors that can sink
3mA at V
< 0.4 V . These open drain outputs do not have
OUT
clamping diodes to V
bus and V
is switched off, the I2C bus is not affected.
DD
Address Register, S1ADR
This 8-bit special function register may be loaded with the 7-bit slave
address (7 most significant bits) to which SIO1 will respond when
programmed as a slave transmitter or receiver. The LSB (GC) is
used to enable general call address (00H) recognition.
2
C compatible input levels. If the input voltage
/4), and
OSC
. Thus, if the device is connected to the I2C
DD
CLOCK LINE HELD LOW WHILE
INTERRUPTS ARE SERVICED
9
REPEATED IF MORE BYTES
ARE TRANSFERRED
ACK
P/S
SU00965
Comparator
The comparator compares the received 7-bit slave address with its
own slave address (7 most significant bits in S1ADR). It also
compares the first received 8-bit byte with the general call address
(00H). If an equality is found, the appropriate status bits are set and
an interrupt is requested.
Shift Register, S1DAT
This 8-bit special function register contains a byte of serial data to
be transmitted or a byte which has just been received. Data in
S1DAT is always shifted from right to left; the first bit to be
transmitted is the MSB (bit 7) and, after a byte has been received,
the first bit of received data is located at the MSB of S1DAT. While
data is being shifted out, data on the bus is simultaneously being
shifted in; S1DAT always contains the last byte present on the bus.
Thus, in the event of lost arbitration, the transition from master
transmitter to slave receiver is made with the correct data in S1DAT.
2002 Oct 28
13
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P1.7/SDA
P1.7
INPUT
FILTER
OUTPUT
STAGE
S1ADR
S1DAT
ADDRESS REGISTER
COMPARATOR
SHIFT REGISTER
P89C660/P89C662/P89C664/
P89C668
8
ACK
8
P1.6/SCL
INPUT
FILTER
OUTPUT
STAGE
P1.6
TIMER 1
OVERFLOW
STATUS BITS
S1CON
S1STA
ARBITRATION &
SYNC LOGIC
SERIAL CLOCK
GENERATOR
CONTROL REGISTER
STATUS
DECODER
STATUS REGISTER
TIMING
&
CONTROL
LOGIC
8
8
f
/4
OSC
INTERRUPT
INTERNAL BUS
2002 Oct 28
su00966
Figure 3. I2C Bus Serial Interface Block Diagram
14
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Arbitration and Synchronization Logic
In the Master Transmitter mode, the arbitration logic checks that
every transmitted logic 1 actually appears as a logic 1 on the I
bus. If another device on the bus overrules a logic 1 and pulls the
SDA line low, arbitration is lost, and SIO1 immediately changes from
master transmitter to slave receiver. SIO1 will continue to output
clock pulses (on SCL) until transmission of the current serial byte is
complete.
Arbitration may also be lost in the Master Receiver mode. Loss of
arbitration in this mode can only occur while SIO1 is returning a “not
acknowledge: (logic 1) to the bus. Arbitration is lost when another
device on the bus pulls this signal LOW. Since this can occur only at
the end of a serial byte, SIO1 generates no further clock pulses.
Figure 4 shows the arbitration procedure.
(1) (1) (2)
SDA
2
C
P89C660/P89C662/P89C664/
P89C668
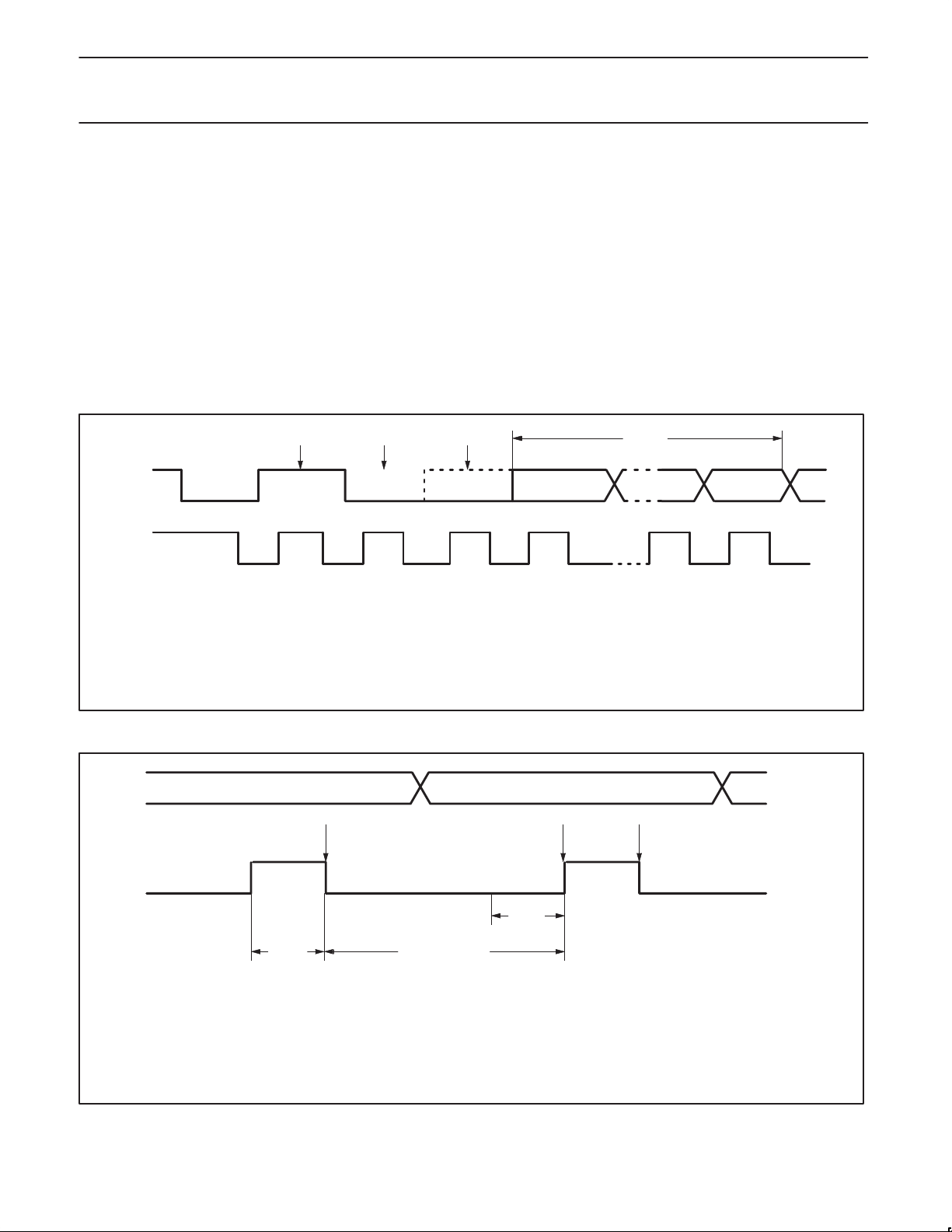
The synchronization logic will synchronize the serial clock generator
with the clock pulses on the SCL line from another device. If two or
more master devices generate clock pulses, the “mark” duration is
determined by the device that generates the shortest “marks,” and
the “space” duration is determined by the device that generates the
longest “spaces.” Figure 5 shows the synchronization procedure.
A slave may stretch the space duration to slow down the bus
master. The space duration may also be stretched for handshaking
purposes. This can be done after each bit or after a complete byte
transfer. SIO1 will stretch the SCL space duration after a byte has
been transmitted or received and the acknowledge bit has been
transferred. The serial interrupt flag (SI) is set, and the stretching
continues until the serial interrupt flag is cleared.
(3)
SCL
1
234 89
ACK
1. Another device transmits identical serial data.
2. Another device overrules a logic 1 (dotted line) transmitted by SIO1 (master) by pulling the SDA line low. Arbitration is
lost, and SIO1 enters the slave receiver mode.
3. SIO1 is in the slave receiver mode but still generates clock pulses until the current byte has been transmitted. SIO1 will
not generate clock pulses for the next byte. Data on SDA originates from the new master once it has won arbitration.
Figure 4. Arbitration Procedure
SDA
SCL
MARK
DURATION
(1)
(2)
SPACE DURATION
(3) (1)
SU00967
1. Another service pulls the SCL line low before the SIO1 “mark” duration is complete. The serial clock generator is immediately
reset and commences with the “space” duration by pulling SCL low.
2. Another device still pulls the SCL line low after SIO1 releases SCL. The serial clock generator is forced into the wait state
until the SCL line is released.
3. The SCL line is released, and the serial clock generator commences with the mark duration.
Figure 5. Serial Clock Synchronization
2002 Oct 28
15
SU00968
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Serial Clock Generator
This programmable clock pulse generator provides the SCL clock
pulses when SIO1 is in the Master Transmitter or Master Receiver
mode. It is switched off when SIO1 is in a Slave mode. The
programmable output clock frequencies are: f
(12-clock mode) or f
OSC
/60, f
/4800 (6-clock mode) and the
OSC
OSC
/120, f
OSC
/9600
Timer 1 overflow rate divided by eight. The output clock pulses have
a 50% duty cycle unless the clock generator is synchronized with
other SCL clock sources as described above.
Timing and Control
The timing and control logic generates the timing and control signals
for serial byte handling. This logic block provides the shift pulses for
S1DAT, enables the comparator, generates and detects start and
stop conditions, receives and transmits acknowledge bits, controls
the master and Slave modes, contains interrupt request logic, and
monitors the I
2
C bus status.
Control Register, S1CON
This 7-bit special function register is used by the microcontroller to
control the following SIO1 functions: start and restart of a serial
transfer, termination of a serial transfer, bit rate, address recognition,
and acknowledgment.
Status Decoder and Status Register
The status decoder takes all of the internal status bits and
compresses them into a 5-bit code. This code is unique for each I
2
C
bus status. The 5-bit code may be used to generate vector
addresses for fast processing of the various service routines. Each
service routine processes a particular bus status. There are 26
possible bus states if all four modes of SIO1 are used. The 5-bit
status code is latched into the five most significant bits of the status
register when the serial interrupt flag is set (by hardware) and
remains stable until the interrupt flag is cleared by software. The
three least significant bits of the status register are always zero. If
the status code is used as a vector to service routines, then the
routines are displaced by eight address locations. Eight bytes of
code is sufficient for most of the service routines.
The Four SIO1 Special Function Registers
The microcontroller interfaces to SIO1 via four special function
registers. These four SFRs (S1ADR, S1DAT, S1CON, and S1STA)
are described individually in the following sections.
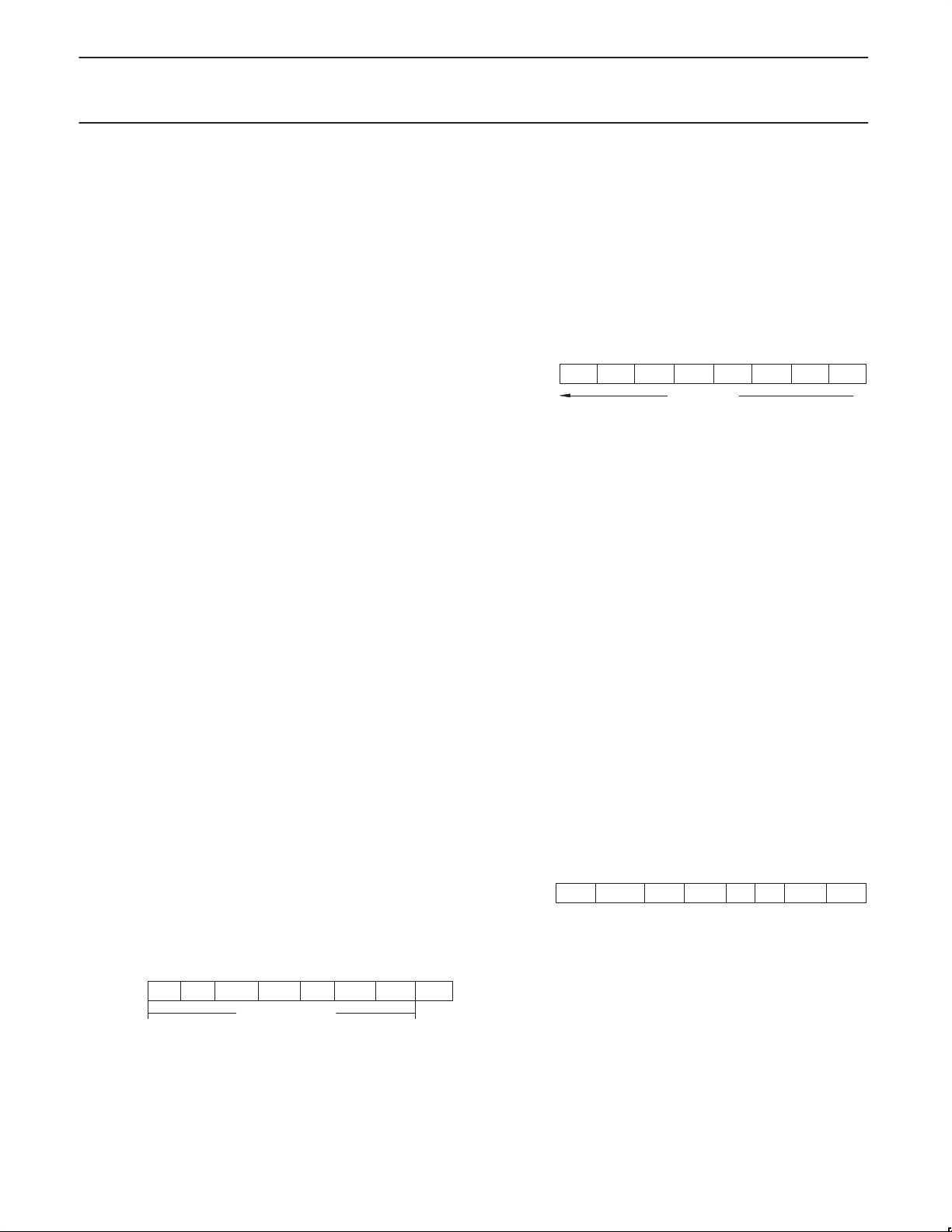
The Address Register, S1ADR
The CPU can read from and write to this 8-bit, directly addressable
SFR. S1ADR is not affected by the SIO1 hardware. The contents of
this register are irrelevant when SIO1 is in a Master mode. In the
Slave modes, the seven most significant bits must be loaded with
the microcontroller’s own slave address, and, if the least significant
bit is set, the general call address (00H) is recognized; otherwise it
is ignored.
7
65 43210
S1ADR (DBH) XGC
The most significant bit corresponds to the first bit received from the
2
I
C bus after a start condition. A logic 1 in S1ADR corresponds to a
high level on the I
on the bus.
The Data Register, S1DAT
S1DAT contains a byte of serial data to be transmitted or a byte
which has just been received. The CPU can read from and write to
X XXXX X
own slave address
2
C bus, and a logic 0 corresponds to a low level
this 8-bit, directly addressable SFR while it is not in the process of
shifting a byte. This occurs when SIO1 is in a defined state and the
serial interrupt flag is set. Data in S1DAT remains stable as long as
SI is set. Data in S1DAT is always shifted from right to left: the first
bit to be transmitted is the MSB (bit 7), and, after a byte has been
received, the first bit of received data is located at the MSB of
S1DAT. While data is being shifted out, data on the bus is
simultaneously being shifted in; S1DAT always contains the last
data byte present on the bus. Thus, in the event of lost arbitration,
the transition from master transmitter to slave receiver is made with
the correct data in S1DAT.
7
65 43210
S1DAT (DAH) SD7 SD6 SD5 SD4 SD3 SD2 SD1 SD0
shift direction
SD7 - SD0:
Eight bits to be transmitted or just received. A logic 1 in S1DAT
corresponds to a high level on the I
corresponds to a low level on the bus. Serial data shifts through
S1DAT from right to left. Figure 6 shows how data in S1DAT is
serially transferred to and from the SDA line.
S1DAT and the ACK flag form a 9-bit shift register which shifts in or
shifts out an 8-bit byte, followed by an acknowledge bit. The ACK
flag is controlled by the SIO1 hardware and cannot be accessed by
the CPU. Serial data is shifted through the ACK flag into S1DAT on
the rising edges of serial clock pulses on the SCL line. When a byte
has been shifted into S1DAT, the serial data is available in S1DAT,
and the acknowledge bit is returned by the control logic during the
ninth clock pulse. Serial data is shifted out from S1DAT via a buf fer
(BSD7) on the falling edges of clock pulses on the SCL line.
When the CPU writes to S1DAT, BSD7 is loaded with the content of
S1DAT.7, which is the first bit to be transmitted to the SDA line (see
Figure 7). After nine serial clock pulses, the eight bits in S1DAT will
have been transmitted to the SDA line, and the acknowledge bit will
be present in ACK. Note that the eight transmitted bits are shifted
back into S1DAT.
The Control Register, S1CON
The CPU can read from and write to this 8-bit, directly addressable
SFR. Two bits are affected by the SIO1 hardware: the SI bit is set
when a serial interrupt is requested, and the STO bit is cleared when
a STOP condition is present on the I
cleared when ENS1 = “0”.
7
6543210
S1CON (D8H) ENS1 STA STO SI AA CR1 CR0
CR2
ENS1, the SIO1 Enable Bit: ENS1 = “0”: When ENS1 is “0”, the
SDA and SCL outputs are in a high impedance state. SDA and SCL
input signals are ignored, SIO1 is in the “not addressed” slave state,
and the STO bit in S1CON is forced to “0”. No other bits are
affected. P1.6 and P1.7 may be used as open drain I/O ports.
ENS1 = “1”: When ENS1 is “1”, SIO1 is enabled. The P1.6 and P1.7
port latches must be set to logic 1.
ENS1 should not be used to temporarily release SIO1 from the I2C
bus since, when ENS1 is reset, the I2C bus status is lost. The AA
flag should be used instead (see description of the AA flag in the
following text).
P89C668
2
C bus, and a logic 0
2
C bus. The STO bit is also
2002 Oct 28
16
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
INTERNAL BUS
SDA
BSD7 S1DAT ACK
SCL
SDA
D7 D6 D5 D4 D3 D2 D1 D0 A
SHIFT PULSES
Figure 6. Serial Input/Output Configuration
P89C660/P89C662/P89C664/
P89C668
8
SU00969
SCL
SHIFT ACK & S1DAT
ACK
SHIFT BSD7
BSD7
LOADED BY THE CPU
(1) Valid data in S1DAT
(2) Shifting data in S1DAT and ACK
(3) High level on SDA
(2) (2) (2) (2) (2) (2) (2) (2) A
(2) (2) (2) (2) (2) (2) (2) (2) (1)(1)S1DAT
D7 D6 D5 D4 D3 D2 D1 D0 (3)
Figure 7. Shift-in and Shift-out Timing
In the following text, it is assumed that ENS1 = “1”.
The “START” Flag, STA: STA = “1”: When the STA bit is set to
enter a Master mode, the SIO1 hardware checks the status of the
I2C bus and generates a STAR T condition if the bus is free. If the
bus is not free, then SIO1 waits for a STOP condition (which will free
the bus) and generates a STAR T condition after a delay of half a
clock period of the internal serial clock generator.
If STA is set while SIO1 is already in a Master mode and one or
more bytes are transmitted or received, SIO1 transmits a repeated
START condition. STA may be set at any time. STA may also be set
when SIO1 is an addressed slave.
SHIFT IN
SHIFT OUT
SU00970
STA = “0”: When the STA bit is reset, no START condition or
repeated START condition will be generated.
The STOP Flag, STO: STO = “1”: When the STO bit is set while
SIO1 is in a Master mode, a STOP condition is transmitted to the
2
I
C bus. When the STOP condition is detected on the bus, the SIO1
hardware clears the STO flag. In a Slave mode, the STO flag may
be set to recover from an error condition. In this case, no STOP
condition is transmitted to the I
2
C bus. However, the SIO1 hardware
behaves as if a STOP condition has been received and switches to
the defined “not addressed” Slave Receiver mode. The STO flag is
automatically cleared by hardware.
2002 Oct 28
17

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
If the STA and STO bits are both set, the a STOP condition is
transmitted to the I
mode, SIO1 generates an internal STOP condition which is not
transmitted). SIO1 then transmits a STAR T condition.
STO = “0”: When the STO bit is reset, no STOP condition will be
generated.
The Serial Interrupt Flag, SI: SI = “1”: When the SI flag is set, then,
if the EA and ES1 (interrupt enable register) bits are also set, a
serial interrupt is requested. SI is set by hardware when one of 25 of
the 26 possible SIO1 states is entered. The only state that does not
cause SI to be set is state F8H, which indicates that no relevant
state information is available.
While SI is set, the low period of the serial clock on the SCL line is
stretched, and the serial transfer is suspended. A high level on the
SCL line is unaffected by the serial interrupt flag. SI must be reset
by software.
SI = “0”: When the SI flag is reset, no serial interrupt is requested,
and there is no stretching of the serial clock on the SCL line.
The Assert Acknowledge Flag, AA: AA = “1”: If the AA flag is set,
an acknowledge (low level to SDA) will be returned during the
acknowledge clock pulse on the SCL line when:
– The “own slave address” has been received
– The general call address has been received while the general call
bit (GC) in S1ADR is set
– A data byte has been received while SIO1 is in the Master
Receiver mode
– A data byte has been received while SIO1 is in the addressed
Slave Receiver mode
AA = “0”: if the AA flag is reset, a not acknowledge (high level to
SDA) will be returned during the acknowledge clock pulse on SCL
when:
– A data has been received while SIO1 is in the Master Receiver
mode
– A data byte has been received while SIO1 is in the addressed
Slave Receiver mode
2
C bus if SIO1 is in a Master mode (in a Slave
P89C660/P89C662/P89C664/
P89C668
When SI is cleared, SIO1 leaves state C8H, enters the not
addressed Slave Receiver mode, and the SDA line remains at a
high level. In state C8H, the AA flag can be set again for future
address recognition.
When SIO1 is in the not addressed Slave mode, its own slave
address and the general call address are ignored. Consequently, no
acknowledge is returned, and a serial interrupt is not requested.
Thus, SIO1 can be temporarily released from the I
bus status is monitored. While SIO1 is released from the bus,
STAR T and STOP conditions are detected, and serial data is shifted
in. Address recognition can be resumed at any time by setting the
AA flag. If the AA flag is set when the part’s own Slave address or
the general call address has been partly received, the address will
be recognized at the end of the byte transmission.
The Clock Rate Bits CR0, CR1, and CR2: These three bits
determine the serial clock frequency when SIO1 is in a Master
mode. The various serial rates are shown in Table 3.
A 12.5 kHz bit rate may be used by devices that interface to the I
bus via standard I/O port lines which are software driven and slow.
100 kHz is usually the maximum bit rate and can be derived from a
16 MHz, 12 MHz, or a 6 MHz oscillator. A variable bit rate (0.5 kHz
to 62.5 kHz) may also be used if Timer 1 is not required for any
other purpose while SIO1 is in a Master mode.
The frequencies shown in Table 3 are unimportant when SIO1 is in a
Slave mode. In the Slave modes, SIO1 will automatically
synchronize with any clock frequency up to 100 kHz.
The Status Register, S1STA
S1STA is an 8-bit read-only special function register. The three least
significant bits are always zero. The five most significant bits contain
the status code. There are 26 possible status codes. When S1STA
contains F8H, no relevant state information is available and no serial
interrupt is requested. All other S1STA values correspond to defined
SIO1 states. When each of these states is entered, a serial interrupt
is requested (SI = “1”). A valid status code is present in S1STA one
machine cycle after SI is set by hardware and is still present one
machine cycle after SI has been reset by software.
2
C bus while the
2
C
When SIO1 is in the addressed Slave Transmitter mode, state C8H
will be entered after the last serial is transmitted (see Figure 11).
2002 Oct 28
18
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Table 3. Serial Clock Rates
6-clock mode
BIT FREQUENCY (kHz) AT f
CR2 CR1 CR0 3 MHz 6 MHz 8 MHz 12 MHz
0 0 0 23 47 62.5 94 117
0 0 1 27 54 71 107
0 1 0 31 63 83.3 125
0 1 1 37 75 100 150
1 0 0 6.25 12.5 17 25 31 480
1 0 1 50 100 133
1 1 0 100 200 267
1 1 1 0.24 < 62.5
0 < 255
0.49 < 62.5
0 < 254
1
1
0.65 < 55.6
0 < 253
OSC
1
1
1
1
200
1
400
0.98 < 50.0
0 < 251
2
2
15 MHz
1
1
134
1
156
1
188
1
250
1
500
1.22 < 52.1
0 < 250
f
OSC
48 × (256 – (reload value Timer 1))
Reload value Timer 1 in Mode 2.
12-clock mode
BIT FREQUENCY (kHz) AT f
CR2 CR1 CR0 6 MHz 12 MHz 16 MHz 24 MHz
0 0 0 23 47 62.5 94 117
0 0 1 27 54 71 107
0 1 0 31 63 83.3 125
0 1 1 37 75 100 150
1 0 0 6.25 12.5 17 25 31 960
1 0 1 50 100 133
1 1 0 100 200 267
1 1 1 0.24 < 62.5
0 < 255
0.49 < 62.5
0 < 254
NOTES:
1. These frequencies exceed the upper limit of 100 kHz of the I
2. At f
3. At f
= 12 MHz/15 MHz the maximum I2C bus rate of 100 kHz cannot be realized due to the fixed divider rates.
OSC
= 24 MHz/30 MHz the maximum I2C bus rate of 100 kHz cannot be realized due to the fixed divider rates.
OSC
1
1
0.65 < 55.6
0 < 253
2
C-bus specification and cannot be used in an I2C-bus application.
OSC
1
1
1
1
200
1
400
0.98 < 50.0
0 < 251
3
3
30 MHz
1
1
134
1
156
1
188
1
250
1
500
1.22 < 52.1
0 < 250
f
OSC
96 × (256 – (reload value Timer 1))
Reload value Timer 1 in Mode 2.
P89C668
DIVIDED BY
128
112
96
80
60
30
DIVIDED BY
256
224
192
160
120
60
2002 Oct 28
19
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
More Information on SIO1 Operating Modes
The four operating modes are:
– Master Transmitter
– Master Receiver
– Slave Receiver
– Slave Transmitter
Data transfers in each mode of operation are shown in Figures 8-11.
These figures contain the following abbreviations:
Abbreviation Explanation
S Start condition
SLA 7-bit slave address
R Read bit (high level at SDA)
W Write bit (low level at SDA)
A Acknowledge bit (low level at SDA)
A
Data 8-bit data byte
P Stop condition
In Figures 8-11, circles are used to indicate when the serial interrupt
flag is set. The numbers in the circles show the status code held in
the S1STA register. At these points, a service routine must be
executed to continue or complete the serial transfer. These service
routines are not critical since the serial transfer is suspended until
the serial interrupt flag is cleared by software.
When a serial interrupt routine is entered, the status code in S1STA
is used to branch to the appropriate service routine. For each status
code, the required software action and details of the following serial
transfer are given in Tables 4-8.
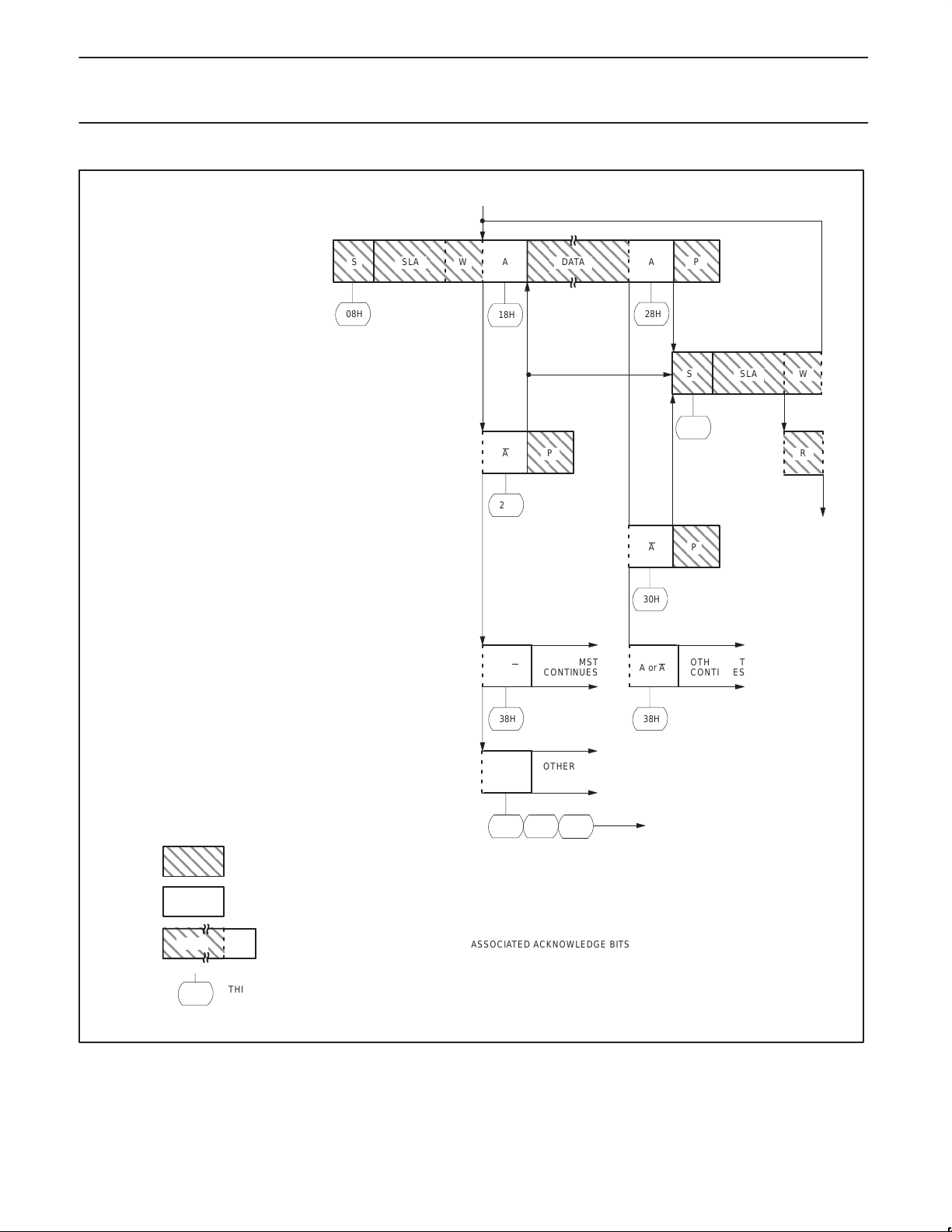
Master Transmitter mode
In the Master Transmitter mode, a number of data bytes are
transmitted to a slave receiver (see Figure 8). Before the Master
Transmitter mode can be entered, S1CON must be initialized as
follows:
7
S1CON (D8H) CR2 ENS1 STA STO SI AA CR1 CR0
bit
rate
CR0, CR1, and CR2 define the serial bit rate. ENS1 must be set to
logic 1 to enable SIO1. If the AA bit is reset, SIO1 will not
acknowledge its own slave address or the general call address in
the event of another device becoming master of the bus. In other
words, if AA is reset, SIO0 cannot enter a Slave mode. STA, STO,
and SI must be reset.
The Master Transmitter mode may now be entered by setting the
STA bit using the SETB instruction. The SIO1 logic will now test the
2
I
C bus and generate a start condition as soon as the bus becomes
free. When a STAR T condition is transmitted, the serial interrupt flag
(SI) is set, and the status code in the status register (S1STA) will be
08H. This status code must be used to vector to an interrupt service
routine that loads S1DA T with the slave address and the data
direction bit (SLA+W). The SI bit in S1CON must then be reset
before the serial transfer can continue.
When the slave address and the direction bit have been transmitted
and an acknowledgment bit has been received, the serial interrupt
flag (SI) is set again, and a number of status codes in S1STA are
possible. There are 18H, 20H, or 38H for the Master mode and also
68H, 78H, or B0H if the Slave mode was enabled (AA = logic 1). The
appropriate action to be taken for each of these status codes is
detailed in Table 4. After a repeated start condition (state 10H). SIO1
Not acknowledge bit (high level at SDA)
6543210
1000X
bit rate
P89C660/P89C662/P89C664/
P89C668
may switch to the Master Receiver mode by loading S1DAT with
SLA+R).
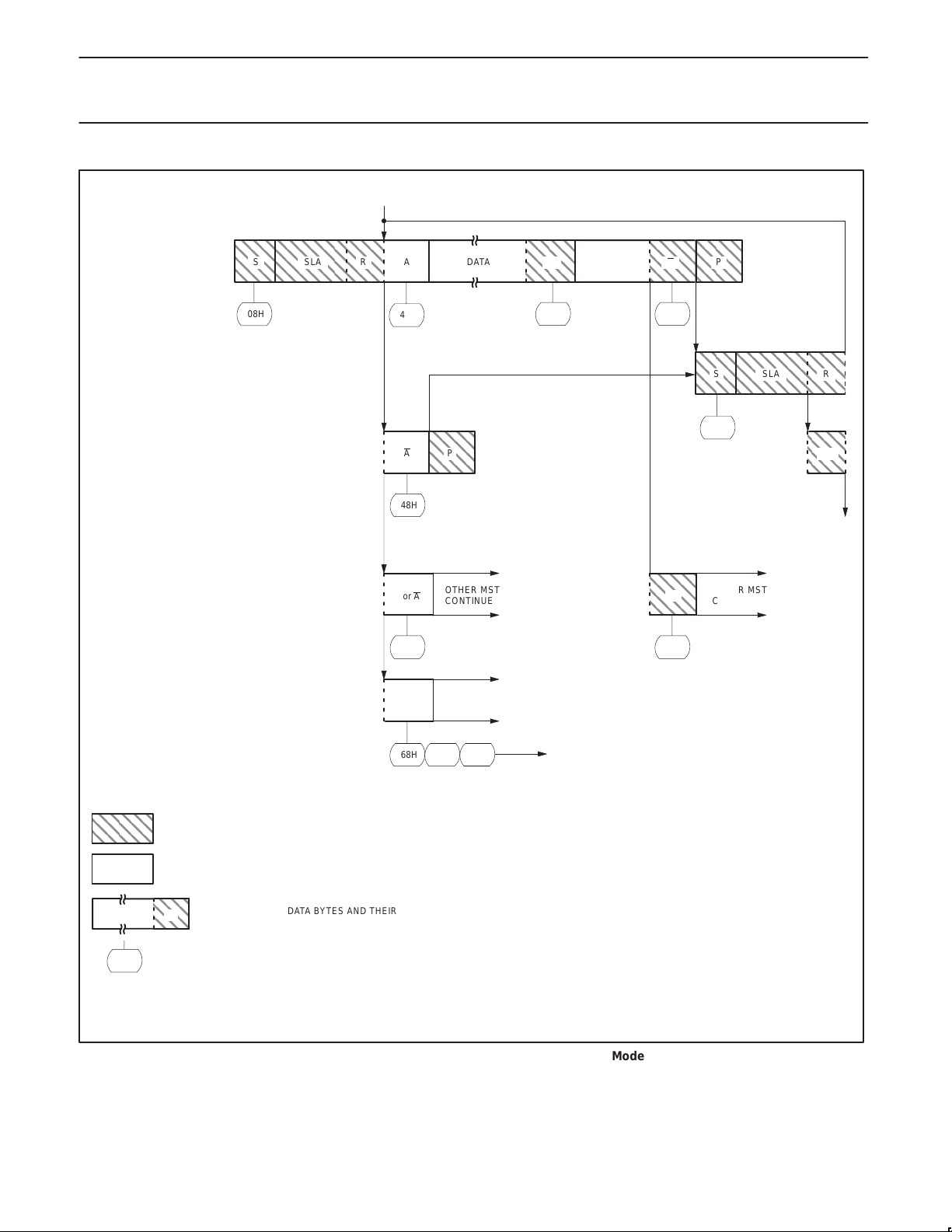
Master Receiver mode
In the Master Receiver mode, a number of data bytes are received
from a slave transmitter (see Figure 9). The transfer is initialized as
in the Master Transmitter mode. When the start condition has been
transmitted, the interrupt service routine must load S1DAT with the
7-bit slave address and the data direction bit (SLA+R). The SI bit in
S1CON must then be cleared before the serial transfer can
continue.
When the slave address and the data direction bit have been
transmitted and an acknowledgment bit has been received, the
serial interrupt flag (SI) is set again, and a number of status codes in
S1STA are possible. These are 40H, 48H, or 38H for the Master
mode and also 68H, 78H, or B0H if the Slave mode was enabled
(AA = logic 1). The appropriate action to be taken for each of these
status codes is detailed in Table 5. ENS1, CR1, and CR0 are not
affected by the serial transfer and are not referred to in Table 5. After
a repeated start condition (state 10H), SIO1 may switch to the
Master Transmitter mode by loading S1DAT with SLA+W.
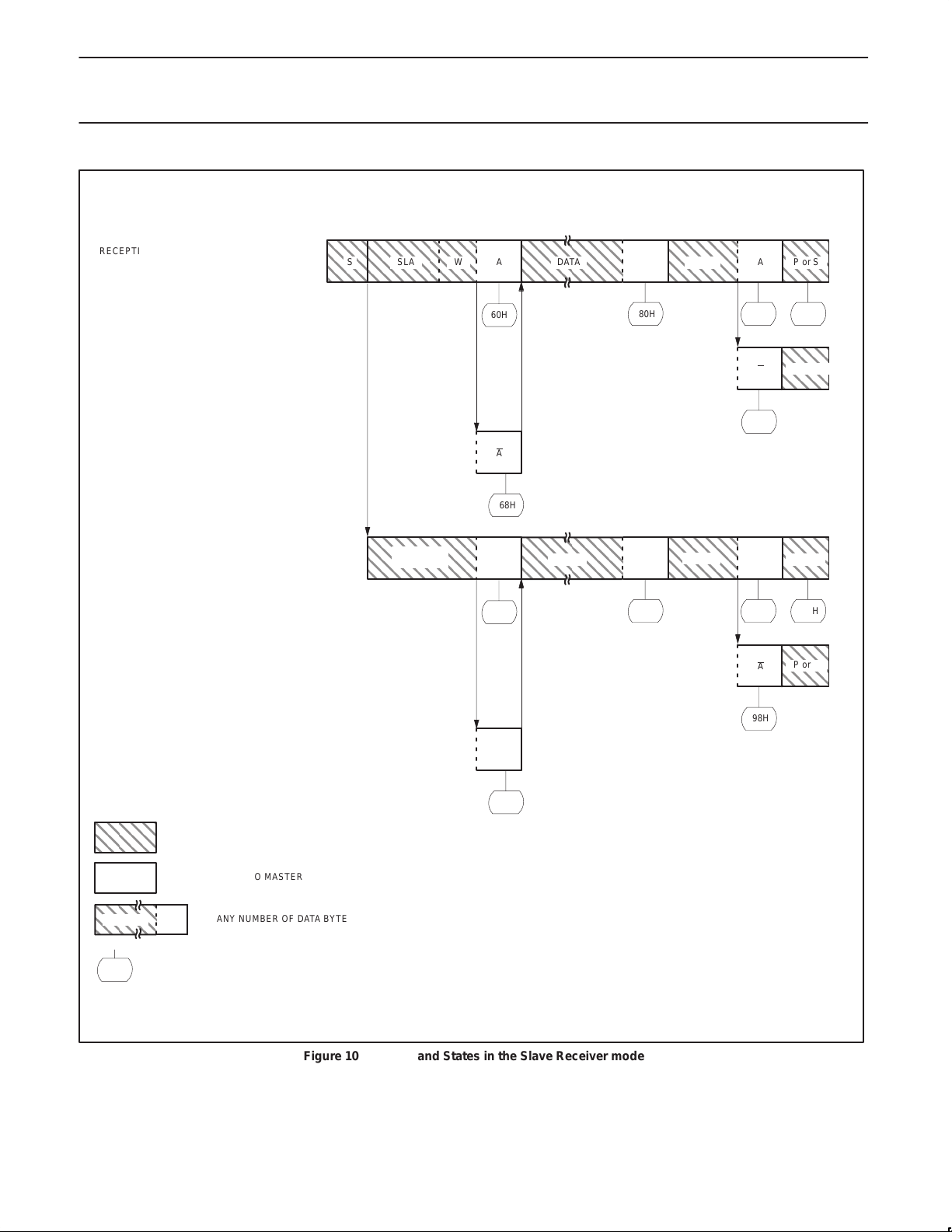
Slave Receiver mode
In the Slave Receiver mode, a number of data bytes are received
from a master transmitter (see Figure 10). To initiate the Slave
Receiver mode, S1ADR and S1CON must be loaded as follows:
7
65 4321 0
S1ADR (DBH) XGC
The upper 7 bits are the address to which SIO1 will respond when
addressed by a master. If the LSB (GC) is set, SIO1 will respond to
the general call address (00H); otherwise it ignores the general call
address.
S1CON (D8H) ENS1 STA STO SI AA CR1 CR0
CR0, CR1, and CR2 do not affect SIO1 in the Slave mode. ENS1
must be set to logic 1 to enable SIO1. The AA bit must be set to
enable SIO1 to acknowledge its own slave address or the general
call address. STA, STO, and SI must be reset.
When S1ADR and S1CON have been initialized, SIO1 waits until it
is addressed by its own slave address followed by the data direction
bit which must be “0” (W) for SIO1 to operate in the Slave Receiver
mode. After its own slave address and the W bit have been
received, the serial interrupt flag (I) is set and a valid status code
can be read from S1STA. This status code is used to vector to an
interrupt service routine, and the appropriate action to be taken for
each of these status codes is detailed in Table 6. The Slave
Receiver mode may also be entered if arbitration is lost while SIO1
is in the Master mode (see status 68H and 78H).
If the AA bit is reset during a transfer, SIO1 will return a not
acknowledge (logic 1) to SDA after the next received data byte.
While AA is reset, SIO1 does not respond to its own slave address
or a general call address. However, the I
and address recognition may be resumed at any time by setting AA.
This means that the AA bit may be used to temporarily isolate SIO1
from the I
2
C bus.
X XXXXX
own slave address
7
6543210
CR2
X1 0001X X
2
C bus is still monitored
2002 Oct 28
20
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
MT
SUCCESSFUL TRANSMISSION
TO A SLAVE RECEIVER
NEXT TRANSFER STARTED WITH A REPEATED START CONDITION
NOT ACKNOWLEDGE RECEIVED AFTER THE SLAVE ADDRESS
NOT ACKNOWLEDGE RECEIVED AFTER A DATA BYTE
S SLA WA ADATA P
08H
18H
A P
20H
P89C660/P89C662/P89C664/
P89C668
28H
S SLA W
10H
R
TO MST/REC MODE
A P
ENTRY = MR
ARBITRATION LOST IN SLAVE ADDRESS OR DATA BYTE
ARBITRATION LOST AND ADDRESSED AS SLAVE
FROM MASTER TO SLAVE
FROM SLAVE TO MASTER
Data
A
ANY NUMBER OF DATA BYTES AND THEIR ASSOCIATED ACKNOWLEDGE BITS
THIS NUMBER (CONTAINED IN S1STA) CORRESPONDS TO A DEFINED STATE OF THE I
n
A or A
OTHER MST
CONTINUES
38H
OTHER MST
A
CONTINUES
68H 78H 80H
30H
A or A
38H
2
C BUS. SEE TABLE 4.
OTHER MST
CONTINUES
TO CORRESPONDING
STATES IN SLAVE MODE
SU00971
2002 Oct 28
Figure 8. Format and States in the Master Transmitter mode
21
Philips Semiconductors Product data
ÇÇÇ
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
MR
SUCCESSFUL RECEPTION
FROM A SLAVE TRANSMITTER
NEXT TRANSFER STARTED WITH A
REPEATED START CONDITION
NOT ACKNOWLEDGE RECEIVED
AFTER THE SLAVE ADDRESS
S SLA RA DATA P
08H
40H
A P
48H
P89C660/P89C662/P89C664/
P89C668
A
50H
DATA
A
58H
S SLA R
10H
TO MST/TRX MODE
ENTRY = MT
W
ARBITRATION LOST IN SLAVE ADDRESS
OR ACKNOWLEDGE BIT
ARBITRATION LOST AND ADDRESSED AS SLAVE
FROM MASTER TO SLAVE
FROM SLAVE TO MASTER
DATA A
THIS NUMBER (CONTAINED IN S1STA) CORRESPONDS TO A DEFINED STATE OF THE I
n
ANY NUMBER OF DATA BYTES AND THEIR ASSOCIATED ACKNOWLEDGE BITS
A or A
OTHER MST
CONTINUES
38H
OTHER MST
A
CONTINUES
68H 78H 80H
TO CORRESPONDING
STATES IN SLAVE MODE
2
C BUS. SEE TABLE 5.
A
38H
OTHER MST
CONTINUES
SU00972
2002 Oct 28
Figure 9. Format and States in the Master Receiver Mode
22
Philips Semiconductors Product data
ÇÇÇ
ÇÇÇ
ÇÇÇ
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
RECEPTION OF THE OWN SLAVE ADDRESS
AND ONE OR MORE DATA BYTES
ALL ARE ACKNOWLEDGED.
LAST DATA BYTE RECEIVED IS
NOT ACKNOWLEDGED
ARBITRATION LOST AS MST AND
ADDRESSED AS SLAVE
S SLA WA ADATA P or S
60H
A
68H
P89C660/P89C662/P89C664/
P89C668
A SLA
80H
DATA
80H A0H
P or S
A
88H
RECEPTION OF THE GENERAL CALL ADDRESS
AND ONE OR MORE DATA BYTES
LAST DATA BYTE IS NOT ACKNOWLEDGED
ARBITRATION LOST AS MST AND ADDRESSED AS SLAVE BY GENERAL CALL
FROM MASTER TO SLAVE
FROM SLAVE TO MASTER
Data
n
A
THIS NUMBER (CONTAINED IN S1STA) CORRESPONDS TO A DEFINED STATE OF THE I
ANY NUMBER OF DATA BYTES AND THEIR ASSOCIATED ACKNOWLEDGE BITS
GENERAL
CALL
AA
70H
A
78H
DATA P or S
2
C BUS. SEE TABLE 6.
A
90H
DATA
90H A0H
P or S
A
98H
2002 Oct 28
SU00973
Figure 10. Format and States in the Slave Receiver mode
23
Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
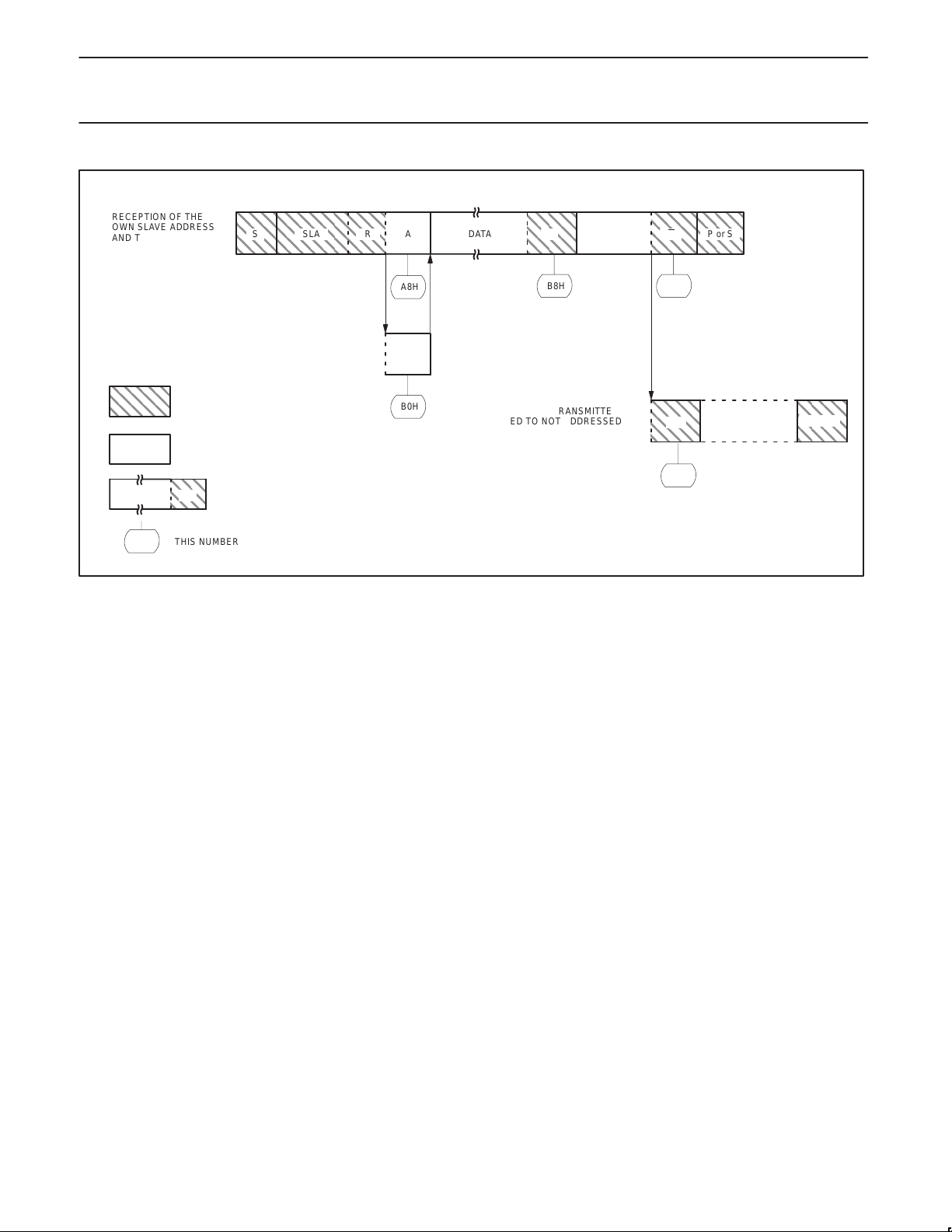
RECEPTION OF THE
OWN SLAVE ADDRESS
AND TRANSMISSION
OF ONE OR MORE
DATA BYTES
FROM MASTER TO SLAVE
FROM SLAVE TO MASTER
DATA
A
S SLA RA DATA P or S
A8H
A
B0H
ANY NUMBER OF DATA BYTES AND THEIR ASSOCIATED ACKNOWLEDGE BITS
ARBITRATION LOST AS MST
AND ADDRESSED AS SLAVE
LAST DATA BYTE TRANSMITTED.
SWITCHED TO NOT ADDRESSED
SLAVE (AA BIT IN S1CON = “0”
P89C660/P89C662/P89C664/
P89C668
ADATAA
B8H
C0H
C8H
A
All “1”s
P or S
n
THIS NUMBER (CONTAINED IN S1STA) CORRESPONDS TO A DEFINED STATE OF THE I
Figure 11. Format and States of the Slave Transmitter mode
2
C BUS. SEE TABLE 7.
SU00974
2002 Oct 28
24
Philips Semiconductors Product data
STATUS
STATUS OF THE
TO/FROM S1DAT
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
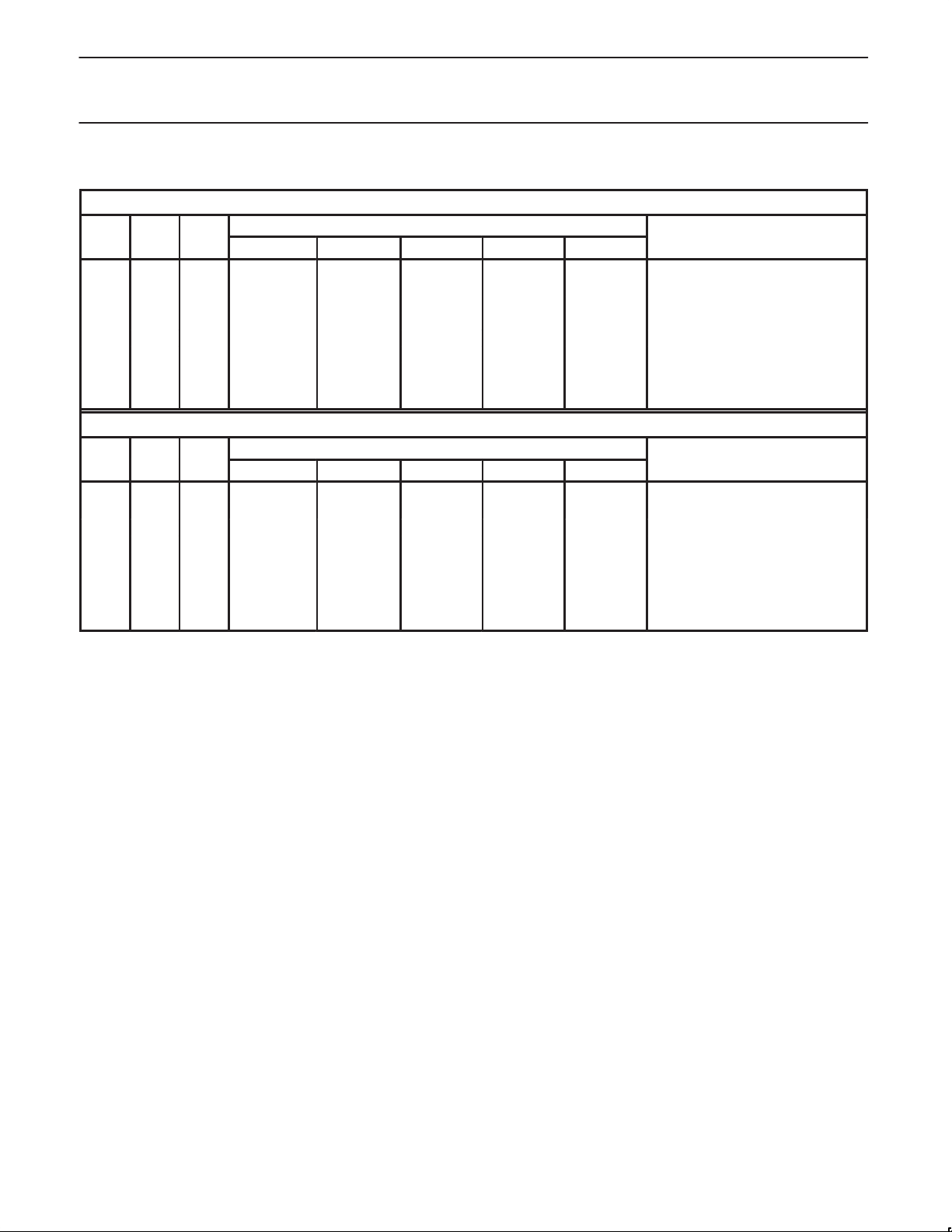
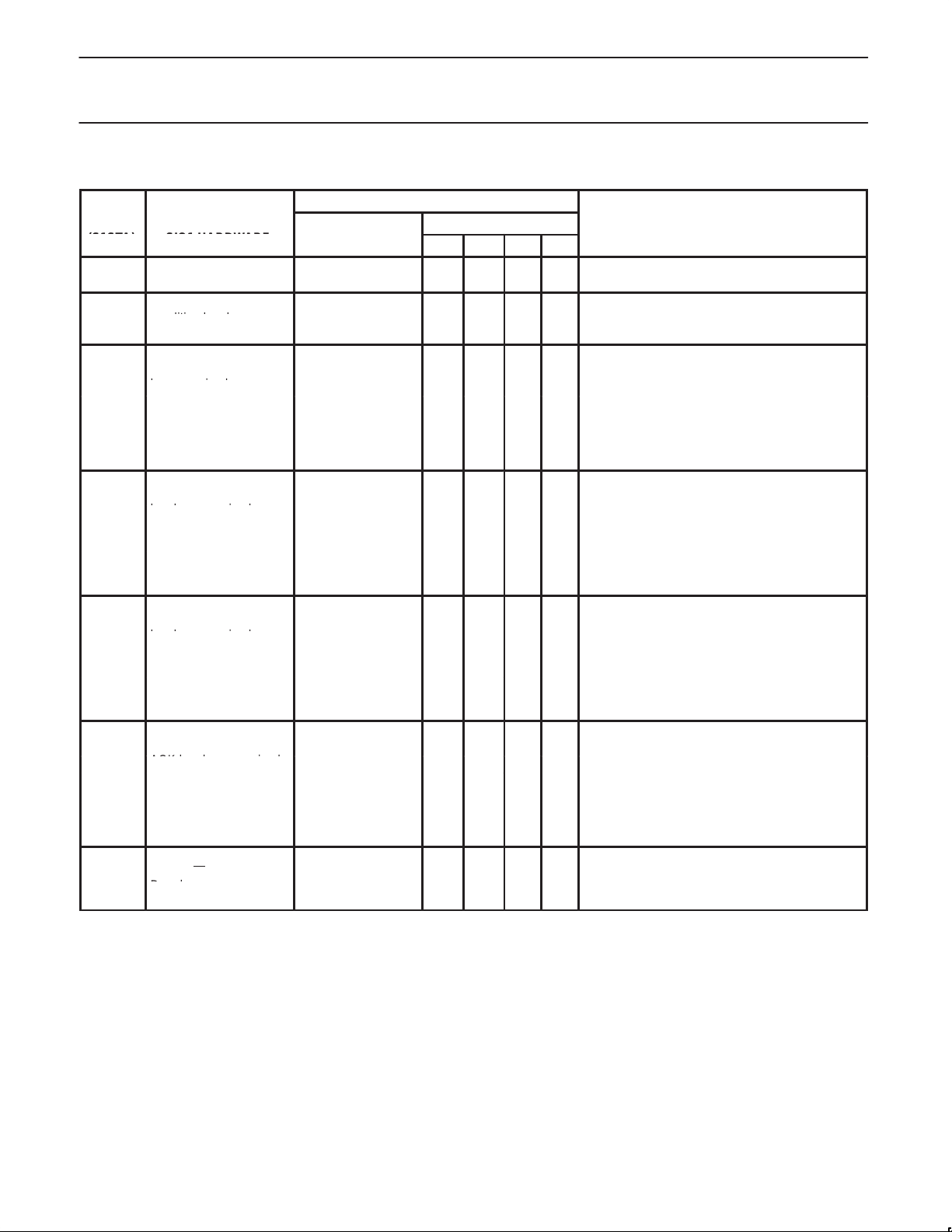
Table 4. Master Transmitter mode
APPLICATION SOFTWARE RESPONSE
CODE
(S1STA) SIO1 HARDWARE
08H A START condition has
10H A repeated START
18H SLA+W has been
20H SLA+W has been
28H Data byte in S1DAT has
30H Data byte in S1DAT has
38H Arbitration lost in
I2C BUS AND
been transmitted
condition has been
transmitted
transmitted; ACK has
been received
transmitted; NOT ACK
has been received
been transmitted; ACK
has been received
been transmitted; NOT
ACK has been received
SLA+R/W or
Data bytes
Load SLA+W X 0 0 X SLA+W will be transmitted;
Load SLA+W or X 0 0 X As above
Load SLA+R X 0 0 X SLA+W will be transmitted;
Load data byte or 0 0 0 X Data byte will be transmitted;
no S1DAT action or 1 0 0 X Repeated START will be transmitted;
no S1DAT action or 0 1 0 X STOP condition will be transmitted;
no S1DAT action 1 1 0 X STOP condition followed by a
Load data byte or 0 0 0 X Data byte will be transmitted;
no S1DAT action or 1 0 0 X Repeated START will be transmitted;
no S1DAT action or 0 1 0 X STOP condition will be transmitted;
no S1DAT action 1 1 0 X STOP condition followed by a
Load data byte or 0 0 0 X Data byte will be transmitted;
no S1DAT action or 1 0 0 X Repeated START will be transmitted;
no S1DAT action or 0 1 0 X STOP condition will be transmitted;
no S1DAT action 1 1 0 X STOP condition followed by a
Load data byte or 0 0 0 X Data byte will be transmitted;
no S1DAT action or 1 0 0 X Repeated START will be transmitted;
no S1DAT action or 0 1 0 X STOP condition will be transmitted;
no S1DAT action 1 1 0 X STOP condition followed by a
No S1DAT action or 0 0 0 X I2C bus will be released;
No S1DAT action 1 0 0 X A START condition will be transmitted when the
TO S1CON
STA STO SI AA
P89C660/P89C662/P89C664/
P89C668
NEXT ACTION TAKEN BY SIO1 HARDWARE
ACK bit will be received
SIO1 will be switched to MST/REC mode
ACK bit will be received
STO flag will be reset
STAR T condition will be transmitted;
STO flag will be reset
ACK bit will be received
STO flag will be reset
STAR T condition will be transmitted;
STO flag will be reset
ACK bit will be received
STO flag will be reset
STAR T condition will be transmitted;
STO flag will be reset
ACK bit will be received
STO flag will be reset
STAR T condition will be transmitted;
STO flag will be reset
not addressed slave will be entered
bus becomes free
2002 Oct 28
25
Philips Semiconductors Product data
2
STATUS
STATUS OF THE I2C
TO/FROM S1DAT
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
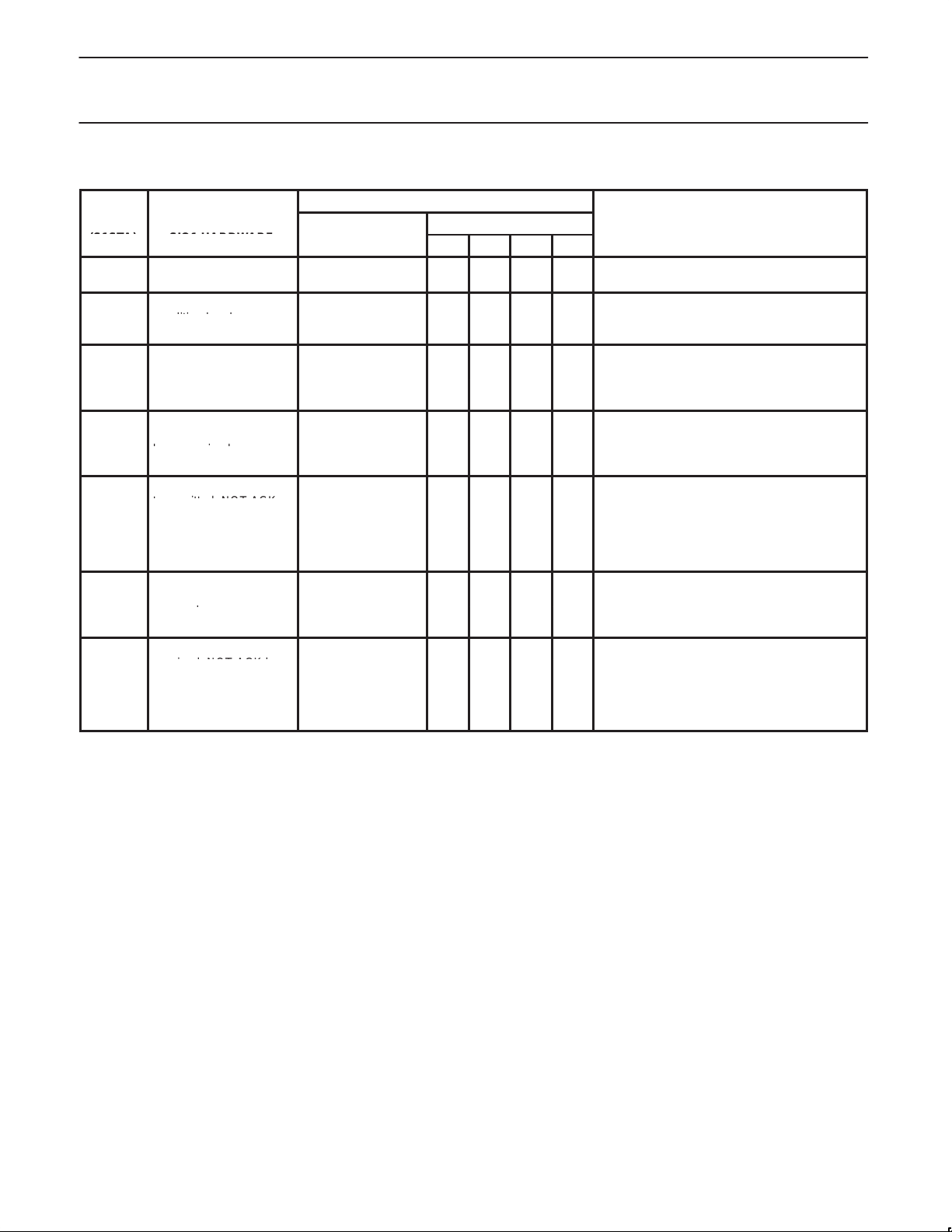
Table 5. Master Receiver Mode
APPLICATION SOFTWARE RESPONSE
CODE
(S1STA) SIO1 HARDWARE
08H A START condition has
10H A repeated START
38H Arbitration lost in
40H SLA+R has been
48H SLA+R has been
50H Data byte has been
58H Data byte has been
BUS AND
been transmitted
condition has been
transmitted
NOT ACK bit
transmitted; ACK has
been received
transmitted; NOT ACK
has been received
received; ACK has been
returned
received; NOT ACK has
been returned
Load SLA+R X 0 0 X SLA+R will be transmitted;
Load SLA+R or X 0 0 X As above
Load SLA+W X 0 0 X SLA+W will be transmitted;
No S1DAT action or 0 0 0 X I2C bus will be released;
No S1DAT action 1 0 0 X A START condition will be transmitted when the
No S1DAT action or 0 0 0 0 Data byte will be received;
no S1DAT action 0 0 0 1 Data byte will be received;
No S1DAT action or 1 0 0 X Repeated START condition will be transmitted
no S1DAT action or 0 1 0 X STOP condition will be transmitted;
no S1DAT action 1 1 0 X STOP condition followed by a
Read data byte or 0 0 0 0 Data byte will be received;
read data byte 0 0 0 1 Data byte will be received;
Read data byte or 1 0 0 X Repeated ST AR T condition will be transmitted
read data byte or 0 1 0 X STOP condition will be transmitted;
read data byte 1 1 0 X STOP condition followed by a
TO S1CON
STA STO SI AA
P89C660/P89C662/P89C664/
P89C668
NEXT ACTION TAKEN BY SIO1 HARDWARE
ACK bit will be received
SIO1 will be switched to MST/TRX mode
SIO1 will enter a Slave mode
bus becomes free
NOT ACK bit will be returned
ACK bit will be returned
STO flag will be reset
STAR T condition will be transmitted;
STO flag will be reset
NOT ACK bit will be returned
ACK bit will be returned
STO flag will be reset
STAR T condition will be transmitted;
STO flag will be reset
2002 Oct 28
26
Philips Semiconductors Product data
STATUS
STATUS OF THE
TO/FROM S1DAT
received ACK has
has been received
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
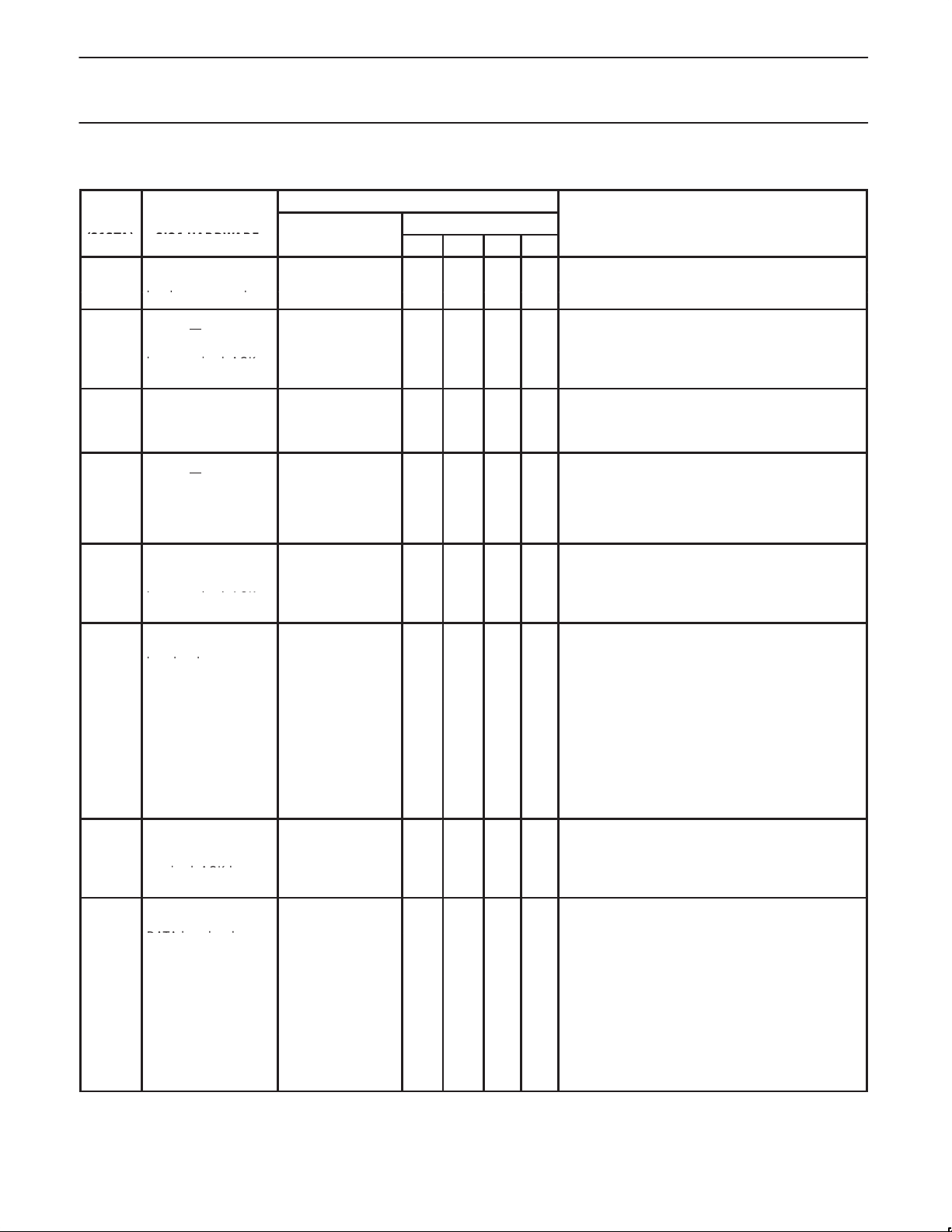
Table 6. Slave Receiver mode
APPLICATION SOFTWARE RESPONSE
CODE
(S1STA) SIO1 HARDWARE
60H Own SLA+W has
68H Arbitration lost in
70H General call address
78H Arbitration lost in
80H Previously addressed
88H Previously addressed
90H Previously addressed
98H Previously addressed
I2C BUS AND
been received; ACK
has been returned
SLA+R/W as master;
Own SLA+W has
been received, ACK
returned
(00H) has been
;
been returned
SLA+R/W as master;
General call address
ACK has been
returned
with own SLV
address; DATA has
been received; ACK
has been returned
with own SLA; DATA
byte has been
received; NOT ACK
has been returned
with General Call;
DATA byte has been
received; ACK has
been returned
with General Call;
DATA byte has been
received; NOT ACK
has been returned
No S1DAT action or X 0 0 0 Data byte will be received and NOT ACK will be
no S1DAT action X 0 0 1 Data byte will be received and ACK will be returned
No S1DAT action or X 0 0 0 Data byte will be received and NOT ACK will be
no S1DAT action X 0 0 1 Data byte will be received and ACK will be returned
No S1DAT action or X 0 0 0 Data byte will be received and NOT ACK will be
no S1DAT action X 0 0 1 Data byte will be received and ACK will be returned
No S1DAT action or X 0 0 0 Data byte will be received and NOT ACK will be
,
no S1DAT action X 0 0 1 Data byte will be received and ACK will be returned
Read data byte or X 0 0 0 Data byte will be received and NOT ACK will be
read data byte X 0 0 1 Data byte will be received and ACK will be returned
Read data byte or 0 0 0 0 Switched to not addressed SLV mode; no recognition
read data byte or 0 0 0 1 Switched to not addressed SLV mode; Own SLA will
read data byte or 1 0 0 0 Switched to not addressed SLV mode; no recognition
read data byte 1 0 0 1 Switched to not addressed SLV mode; Own SLA will
Read data byte or X 0 0 0 Data byte will be received and NOT ACK will be
read data byte X 0 0 1 Data byte will be received and ACK will be returned
Read data byte or 0 0 0 0 Switched to not addressed SLV mode; no recognition
read data byte or 0 0 0 1 Switched to not addressed SLV mode; Own SLA will
read data byte or 1 0 0 0 Switched to not addressed SLV mode; no recognition
read data byte 1 0 0 1 Switched to not addressed SLV mode; Own SLA will
TO S1CON
STA STO SI AA
P89C660/P89C662/P89C664/
P89C668
NEXT ACTION TAKEN BY SIO1 HARDWARE
returned
returned
returned
returned
returned
of own SLA or General call address
be recognized; General call address will be
recognized if S1ADR.0 = logic 1
of own SLA or General call address. A START
condition will be transmitted when the bus becomes
free
be recognized; General call address will be
recognized if S1ADR.0 = logic 1. A START condition
will be transmitted when the bus becomes free.
returned
of own SLA or General call address
be recognized; General call address will be
recognized if S1ADR.0 = logic 1
of own SLA or General call address. A START
condition will be transmitted when the bus becomes
free
be recognized; General call address will be
recognized if S1ADR.0 = logic 1. A START condition
will be transmitted when the bus becomes free.
2002 Oct 28
27

Philips Semiconductors Product data
STATUS
STATUS OF THE
TO/FROM S1DAT
SLV/REC
SLV/TRX
STATUS
STATUS OF THE
TO/FROM S1DAT
ACK has been
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
T able 6. Slave Receiver mode (Continued)
APPLICATION SOFTWARE RESPONSE
CODE
(S1STA) SIO1 HARDWARE
A0H A STOP condition or
I2C BUS AND
repeated STAR T
condition has been
received while still
addressed as
or
No STDAT action or 0 0 0 0 Switched to not addressed SLV mode; no recognition
No STDAT action or 0 0 0 1 Switched to not addressed SLV mode; Own SLA will
No STDAT action or 1 0 0 0 Switched to not addressed SLV mode; no recognition
No STDAT action 1 0 0 1 Switched to not addressed SLV mode; Own SLA will
Table 7. Slave Transmitter mode
APPLICATION SOFTWARE RESPONSE
CODE
(S1STA) SIO1 HARDWARE
A8H Own SLA+R has
B0H Arbitration lost in
B8H Data byte in S1DAT
C0H Data byte in S1DAT
C8H Last data byte in
I2C BUS AND
been received; ACK
has been returned
SLA+R/W as master;
Own SLA+R has
been received, ACK
has been returned
has been transmitted;
received
has been transmitted;
NOT ACK has been
received
S1DAT has been
transmitted (AA = 0);
ACK has been
received
Load data byte or X 0 0 0 Last data byte will be transmitted and ACK bit will be
load data byte X 0 0 1 Data byte will be transmitted; ACK will be received
Load data byte or X 0 0 0 Last data byte will be transmitted and ACK bit will be
load data byte X 0 0 1 Data byte will be transmitted; ACK bit will be received
Load data byte or X 0 0 0 Last data byte will be transmitted and ACK bit will be
load data byte X 0 0 1 Data byte will be transmitted; ACK bit will be received
No S1DAT action or 0 0 0 01 Switched to not addressed SLV mode; no recognition
no S1DAT action or 0 0 0 1 Switched to not addressed SLV mode; Own SLA will
no S1DAT action or 1 0 0 0 Switched to not addressed SLV mode; no recognition
no S1DAT action 1 0 0 1 Switched to not addressed SLV mode; Own SLA will
No S1DAT action or 0 0 0 0 Switched to not addressed SLV mode; no recognition
no S1DAT action or 0 0 0 1 Switched to not addressed SLV mode; Own SLA will
no S1DAT action or 1 0 0 0 Switched to not addressed SLV mode; no recognition
no S1DAT action 1 0 0 1 Switched to not addressed SLV mode; Own SLA will
TO S1CON
STA STO SI AA
TO S1CON
STA STO SI AA
P89C660/P89C662/P89C664/
P89C668
NEXT ACTION TAKEN BY SIO1 HARDWARE
of own SLA or General call address
be recognized; General call address will be
recognized if S1ADR.0 = logic 1
of own SLA or General call address. A START
condition will be transmitted when the bus becomes
free
be recognized; General call address will be
recognized if S1ADR.0 = logic 1. A START condition
will be transmitted when the bus becomes free.
NEXT ACTION TAKEN BY SIO1 HARDWARE
received
received
received
of own SLA or General call address
be recognized; General call address will be
recognized if S1ADR.0 = logic 1
of own SLA or General call address. A START
condition will be transmitted when the bus becomes
free
be recognized; General call address will be
recognized if S1ADR.0 = logic 1. A START condition
will be transmitted when the bus becomes free.
of own SLA or General call address
be recognized; General call address will be
recognized if S1ADR.0 = logic 1
of own SLA or General call address. A START
condition will be transmitted when the bus becomes
free
be recognized; General call address will be
recognized if S1ADR.0 = logic 1. A START condition
will be transmitted when the bus becomes free.
2002 Oct 28
28

Philips Semiconductors Product data
STATUS
STATUS OF THE
TO/FROM S1DAT
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Table 8. Miscellaneous States
APPLICATION SOFTWARE RESPONSE
CODE
(S1STA) SIO1 HARDWARE
F8H No relevant state
00H Bus error during MST
Slave Transmitter mode
In the Slave Transmitter mode, a number of data bytes are
transmitted to a master receiver (see Figure 11). Data transfer is
initialized as in the Slave Receiver mode. When S1ADR and
S1CON have been initialized, SIO1 waits until it is addressed by its
own slave address followed by the data direction bit which must be
“1” (R) for SIO1 to operate in the Slave Transmitter mode. After its
own slave address and the R bit have been received, the serial
interrupt flag (SI) is set and a valid status code can be read from
S1STA. This status code is used to vector to an interrupt service
routine, and the appropriate action to be taken for each of these
status codes is detailed in Table 7. The Slave Transmitter mode may
also be entered if arbitration is lost while SIO1 is in the Master mode
(see state B0H).
If the AA bit is reset during a transfer, SIO1 will transmit the last byte
of the transfer and enter state C0H or C8H. SIO1 is switched to the
“not addressed” Slave mode and will ignore the master receiver if it
continues the transfer. Thus the master receiver receives all 1s as
serial data. While AA is reset, SIO1 does not respond to its own
slave address or a general call address. However, the I
monitored, and address recognition may be resumed at any time by
setting AA. This means that the AA bit may be used to temporarily
isolate SIO1 from the I
I2C BUS AND
information available;
SI = 0
or selected Slave
modes, due to an
illegal STAR T or
STOP condition. State
00H can also occur
when interference
causes SIO1 to enter
an undefined state.
2
C bus.
No S1DAT action No S1CON action Wait or proceed current transfer
No S1DAT action 0 1 0 X Only the internal hardware is affected in the MST or
2
C bus is still
Miscellaneous States
There are two S1STA codes that do not correspond to a defined
SIO1 hardware state (see Table 8). These are discussed below.
S1STA = F8H
This status code indicates that no relevant information is available
because the serial interrupt flag, SI, is not yet set. This occurs
between other states and when SIO1 is not involved in a serial
transfer.
S1STA = 00H
This status code indicates that a bus error has occurred during an
SIO1 serial transfer. A bus error is caused when a START or STOP
condition occurs at an illegal position in the format frame. Examples
of such illegal positions are during the serial transfer of an address
byte, a data byte, or an acknowledge bit. A bus error may also be
caused when external interference disturbs the internal SIO1
signals. When a bus error occurs, SI is set. To recover from a bus
error, the ST O flag must be set and SI must be cleared. This causes
SIO1 to enter the “not addressed” Slave mode (a defined state) and
to clear the STO flag (no other bits in S1CON are affected). The
TO S1CON
STA STO SI AA
P89C660/P89C662/P89C664/
P89C668
NEXT ACTION TAKEN BY SIO1 HARDWARE
addressed SLV modes. In all cases, the bus is
released and SIO1 is switched to the not addressed
SLV mode. STO is reset.
SDA and SCL lines are released (a STOP condition is not
transmitted).
Some Special Cases
The SIO1 hardware has facilities to handle the following special
cases that may occur during a serial transfer.
Simultaneous Repeated START Conditions from Two Masters
A repeated STAR T condition may be generated in the Master
Transmitter or Master Receiver modes. A special case occurs if
another master simultaneously generates a repeated STAR T
condition (see Figure 12). Until this occurs, arbitration is not lost by
either master since they were both transmitting the same data.
If the SIO1 hardware detects a repeated STAR T condition on the I
bus before generating a repeated STAR T condition itself, it will
release the bus, and no interrupt request is generated. If another
master frees the bus by generating a STOP condition, SIO1 will
transmit a normal STAR T condition (state 08H), and a retry of the
total serial data transfer can commence.
Data Transfer After Loss of Arbitration
Arbitration may be lost in the Master Transmitter and Master
Receiver modes (see Figure 4). Loss of arbitration is indicated by
the following states in S1STA: 38H, 68H, 78H, and B0H (see
Figures 8 and 9).
If the STA flag in S1CON is set by the routines which service these
states, then, if the bus is free again, a STAR T condition (state 08H)
is transmitted without intervention by the CPU, and a retry of the
total serial transfer can commence.
Forced Access to the I
In some applications, it may be possible for an uncontrolled source
to cause a bus hang-up. In such situations, the problem may be
caused by interference, temporary interruption of the bus or a
temporary short-circuit between SDA and SCL.
If an uncontrolled source generates a superfluous STAR T or masks
a STOP condition, then the I
STA flag is set and bus access is not obtained within a reasonable
amount of time, then a forced access to the I
is achieved by setting the STO flag while the STA flag is still set. No
STOP condition is transmitted. The SIO1 hardware behaves as if a
STOP condition was received and is able to transmit a START
condition. The ST0 flag is cleared by hardware (see Figure 13).
2
C Bus
2
C bus stays busy indefinitely. If the
2
C bus is possible. This
2
C
2002 Oct 28
29

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
S
SLA W A DATA A S
08H
STA FLAG
18H 28H
OTHER MASTER SENDS REPEATED
START CONDITION EARLIER
Figure 12. Simultaneous Repeated START Conditions from 2 Masters
TIME OUT
P89C660/P89C662/P89C664/
BOTH MASTERS CONTINUE
WITH SLA TRANSMISSION
SU00975
P89C668
SDA LINE
SCL LINE
Figure 13. Forced Access to a Busy I2C Bus
I2C Bus Obstructed by a Low Level on SCL or SDA
2
C bus hang-up occurs if SDA or SCL is pulled LOW by an
An I
uncontrolled source. If the SCL line is obstructed (pulled LOW) by a
device on the bus, no further serial transfer is possible, and the
SIO1 hardware cannot resolve this type of problem. When this
occurs, the problem must be resolved by the device that is pulling
the SCL bus line LOW.
If the SDA line is obstructed by another device on the bus (e.g., a
slave device out of bit synchronization), the problem can be solved
by transmitting additional clock pulses on the SCL line (see
Figure 14). The SIO1 hardware transmits additional clock pulses
when the STA flag is set, but no START condition can be generated
because the SDA line is pulled LOW while the I
2
C bus is considered
free. The SIO1 hardware attempts to generate a STAR T condition
after every two additional clock pulses on the SCL line. When the
SDA line is eventually released, a normal STAR T condition is
transmitted, state 08H is entered, and the serial transfer continues.
If a forced bus access occurs or a repeated START condition is
transmitted while SDA is obstructed (pulled LOW), the SIO1
START CONDITION
SU00976
hardware performs the same action as described above. In each
case, state 08H is entered after a successful START condition is
transmitted and normal serial transfer continues. Note that the CPU
is not involved in solving these bus hang-up problems.
Bus Error
A bus error occurs when a START or STOP condition is present at
an illegal position in the format frame. Examples of illegal positions
are during the serial transfer of an address byte, a data, or an
acknowledge bit.
The SIO1 hardware only reacts to a bus error when it is involved in
a serial transfer either as a master or an addressed slave. When a
bus error is detected, SIO1 immediately switches to the “not
addressed” Slave mode, releases the SDA and SCL lines, sets the
interrupt flag, and loads the status register with 00H. This status
code may be used to vector to a service routine which either
attempts the aborted serial transfer again or simply recovers from
the error condition as shown in Table 8.
2002 Oct 28
30

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
STA FLAG
SDA LINE
SCL LINE
(1) Unsuccessful attempt to send a Start condition
(2) SDA line released
(3) Successful attempt to send a Start condition; state 08H is entered
2
An I
C byte-oriented system driver is described in application note AN435. Please visit
http://www.semiconductors.philips.com/products/all_appnotes.html
(1) (1)
Figure 14. Recovering from a Bus Obstruction Caused by a Low Level on SDA
P89C660/P89C662/P89C664/
P89C668
(2) (3)
START CONDITION
SU00977
2002 Oct 28
31

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
TIMER 0 AND TIMER 1 OPERATION
Timer 0 and Timer 1
The “Timer” or “Counter” function is selected by control bits C/T in
the Special Function Register TMOD (see Figure 15). These two
Timer/Counters have four operating modes, which are selected by
bit-pairs (M1, M0) in TMOD. Modes 0, 1, and 2 are the same for
both Timers/Counters. Mode 3 is different. The four operating modes
are described in the following text.
Mode 0
Putting either Timer into Mode 0 makes it behave as an 8048 T imer,
which is an 8-bit Counter with a divide-by-32 prescaler. Figure 16
shows the Mode 0 operation.
In this mode, the Timer register is configured as a 13-bit register . As
the count rolls over from all 1s to all 0s, it sets the Timer interrupt
flag TFn. The counted input is enabled to the Timer when TRn = 1
and either GA TE = 0 or INTn
Function Register TCON (Figure 17). (Setting GATE = 1 allows the
Timer to be controlled by external input INTn
measurements).
The 13-bit register consists of all 8 bits of THn and the lower 5 bits
of TLn. The upper 3 bits of TLn are indeterminate and should be
ignored. Setting the run flag (TRn) does not clear the registers.
Mode 0 operation is the same for Timer 0 as for Timer 1. There are
two different GA TE bits, one for Timer 1 (TMOD.7) and one for Timer
0 (TMOD.3).
= 1. TRn is a control bit in the Special
, to facilitate pulse width
P89C660/P89C662/P89C664/
P89C668
Mode 1
Mode 1 is the same as Mode 0, except that the Timer register is
being run with all 16 bits.
Mode 2
Mode 2 configures the Timer register as an 8-bit Counter (TLn) with
automatic reload, as shown in Figure 18. Overflow from TLn not only
sets TFn, but also reloads TLn with the contents of THn, which is
preset by software. The reload leaves THn unchanged.
Mode 2 operation is the same for Timer 0 as for Timer 1.
Mode 3
Timer 1 in Mode 3 simply holds its count. The effect is the same as
setting TR1 = 0.
Timer 0 in Mode 3 establishes TL0 and TH0 as two separate
counters. The logic for Mode 3 on Timer 0 is shown in Figure 19.
TL0 uses the Timer 0 control bits: C/T
as pin INT0
cycles) and takes over the use of TR1 and TF1 from Timer 1. Thus,
TH0 now controls the “Timer 1” interrupt.
Mode 3 is provided for applications requiring an extra 8-bit timer on
the counter. Putting Timer 0 in Mode 3 allows an 80C51 to have
three Timer/Counters. When Timer 0 is in Mode 3, Timer 1 can be
turned on and off by switching it out of and into its own Mode 3, or
can still be used by the serial port as a baud rate generator, or in
fact, in any application not requiring an interrupt.
. TH0 is locked into a timer function (counting machine
, GATE, TR0, and TF0 as well
TMOD Address = 89H Reset Value = 00H
Not Bit Addressable
76543 2 1 0
GATE C/T M1
TIMER 1 TIMER 0
BIT SYMBOL FUNCTION
TMOD.3/ GA TE Gating control when set. Timer/Counter “n” is enabled only while “INTn
TMOD.7 “TRn” control pin is set. when cleared Timer “n” is enabled whenever “TRn” control bit is set.
TMOD.2/ C/T
TMOD.6 Set for Counter operation (input from “Tn” input pin).
M1 M0 OPERATING
0 0 8048 Timer: “TLn” serves as 5-bit prescaler.
0 1 16-bit Timer/Counter: “THn” and “TLn” are cascaded; there is no prescaler.
1 0 8-bit auto-reload Timer/Counter: “THn” holds a value which is to be reloaded
1 1 (Timer 0) TL0 is an 8-bit Timer/Counter controlled by the standard Timer 0 control bits.
1 1 (Timer 1) Timer/Counter 1 stopped.
Timer or Counter Selector cleared for Timer operation (input from internal system clock.)
into “TLn” each time it overflows.
TH0 is an 8-bit timer only controlled by Timer 1 control bits.
M0 GATE C/T
M1 M0
” pin is high and
SU01580
2002 Oct 28
Figure 15. Timer/Counter 0/1 Mode Control (TMOD) Register
32

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
OSC
Timer n
Gate bit
INTn Pin
*d = 6 in 6-clock mode; d = 12 in 12-clock mode.
TCON Address = 88H Reset Value = 00H
Tn Pin
÷ d*
TRn
C/T = 0
C/T = 1
Control
TLn
(5 Bits)
THn
(8 Bits)
Figure 16. Timer/Counter 0/1 Mode 0: 13-Bit Timer/Counter
TFn Interrupt
P89C668
SU01618
Bit Addressable
76543210
IE0IT1IE1TR0TF0TR1TF1
IT0
BIT SYMBOL FUNCTION
TCON.7 TF1 Timer 1 overflow flag. Set by hardware on Timer/Counter overflow.
Cleared by hardware when processor vectors to interrupt routine, or clearing the bit in software.
TCON.6 TR1 Timer 1 Run control bit. Set/cleared by software to turn Timer/Counter on/off.
TCON.5 TF0 Timer 0 overflow flag. Set by hardware on Timer/Counter overflow.
Cleared by hardware when processor vectors to interrupt routine, or by clearing the bit in software.
TCON.4 TR0 Timer 0 Run control bit. Set/cleared by software to turn Timer/Counter on/off.
TCON.3 IE1 Interrupt 1 Edge flag. Set by hardware when external interrupt edge detected.
Cleared when interrupt processed.
TCON.2 IT1 Interrupt 1 type control bit. Set/cleared by software to specify falling edge/low level triggered
external interrupts.
TCON.1 IE0 Interrupt 0 Edge flag. Set by hardware when external interrupt edge detected.
Cleared when interrupt processed.
TCON.0 IT0 Interrupt 0 Type control bit. Set/cleared by software to specify falling edge/low level
triggered external interrupts.
Figure 17. Timer/Counter 0/1 Control (TCON) Register
SU01516
2002 Oct 28
33

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
OSC
Timer n
Gate bit
INTn Pin
*d = 6 in 6-clock mode; d = 12 in 12-clock mode.
Tn Pin
÷ d*
TRn
C/T = 0
C/T
= 1
Control
Figure 18. Timer/Counter 0/1 Mode 2: 8-Bit Auto-Reload
P89C660/P89C662/P89C664/
P89C668
TLn
(8 Bits)
THn
(8 Bits)
Reload
TFn
Interrupt
SU01619
OSC
Timer 0
Gate bit
INT0 Pin
OSC
*d = 6 in 6-clock mode; d = 12 in 12-clock mode.
÷ d*
T0 Pin
TR0
÷ d*
TR1
C/T = 0
C/T
= 1
Control
Control
TL0
(8 Bits)
TH0
(8 Bits)
Figure 19. Timer/Counter 0 Mode 3: Two 8-Bit Counters
TF0
TF1
Interrupt
Interrupt
SU01620
2002 Oct 28
34

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
TIMER 2 OPERATION
Timer 2
Timer 2 is a 16-bit Timer/Counter which can operate as either an
event timer or an event counter, as selected by C/T
function register T2CON (see Figure 20). Timer 2 has three operating
modes:
– Capture Mode
– Auto-Reload Mode (up or down counting)
– Baud Rate Generator Mode (see Table 10)
Capture Mode
In the capture mode there are two options which are selected by bit
EXEN2 in T2CON. If EXEN2 = 0, then Timer 2 is a 16-bit timer or
counter (as selected by C/T
sets bit TF2, the Timer 2 overflow bit. This bit can be used to
generate an interrupt (by enabling the Timer 2 interrupt bit in the
IE register). If EXEN2 = 1, Timer 2 operates as described above,
with the added feature that a 1-to-0 transition at external input pin
T2EX causes the current value in the Timer 2 registers, TL2 and
TH2, to be captured into registers RCAP2L and RCAP2H. In
addition, the transition at T2EX causes bit EXF2 in T2CON to be
set. If Timer 2 interrupt has been enabled, EXF2 will generate an
interrupt (which vectors to the same location as Timer 2 overflow
interrupt). The Timer 2 interrupt service routine can interrogate TF2
and EXF2 to determine which event caused the interrupt. The
capture mode is illustrated in Figure 21 (There is no reload value for
TL2 and TH2 in this mode). Even when a capture event occurs from
T2EX, the counter keeps on counting T2EX pin transitions or osc/6
pulses (osc/12 in 12 clock mode).
Auto-Reload Mode (Up or Down Counter)
In the 16-bit auto-reload mode, Timer 2 can be configured as either
a timer or counter (C/T
2 in T2CON) which, upon overflowing
2 in T2CON), then programmed to count up
2 in the special
P89C660/P89C662/P89C664/
P89C668
or down. The counting direction is determined by bit DCEN (Down
Counter Enable) which is located in the T2MOD register (see
Figure 22). When reset is applied (DCEN = 0), Timer 2 defaults to
counting up. If DCEN bit is set, Timer 2 can count up or down
depending on the value of the T2EX pin.
Figure 23 shows Timer 2 which will count up automatically since
DCEN = 0. In this mode there are two options selected by bit
EXEN2 in T2CON register. If EXEN2 = 0, then Timer 2 counts up to
0FFFFH and sets the TF2 (Overflow Flag) bit upon overflow. This
causes the Timer 2 registers to be reloaded with the 16-bit value in
RCAP2L and RCAP2H. The values in RCAP2L and RCAP2H are
preset by software.
If EXEN2 = 1, then a 16-bit reload can be triggered either by an
overflow or by a 1-to-0 transition at input pin T2EX. This transition
also sets the EXF2 bit. The Timer 2 interrupt, if enabled, can be
generated when either TF2 or EXF2 are 1.
In Figure 24 DCEN = 1 which enables Timer 2 to count up or down.
This mode allows pin T2EX to control the direction of count. When a
logic 1 is applied at pin T2EX Timer 2 will count up. Timer 2 will
overflow at 0FFFFH and set the TF2 flag, which can then generate
an interrupt, if the interrupt is enabled. This timer overflow also
causes the 16-bit value in RCAP2L and RCAP2H to be reloaded
into the timer registers TL2 and TH2.
When a logic 0 is applied at pin T2EX this causes Timer 2 to count
down. The timer will underflow when TL2 and TH2 become equal to
the value stored in RCAP2L and RCAP2H. Timer 2 underflow sets
the TF2 flag and causes 0FFFFH to be reloaded into the timer
registers TL2 and TH2.
The external flag EXF2 toggles when Timer 2 underflows or overflows.
This EXF2 bit can be used as a 17th bit of resolution if needed. The
EXF2 flag does not generate an interrupt in this mode of operation.
(MSB) (LSB)
TF2 EXF2 RCLK TCLK EXEN2 TR2 C/T
Symbol Position Name and Significance
TF2 T2CON.7 Timer 2 overflow flag set by a Timer 2 overflow and must be cleared by software. TF2 will not be set
EXF2 T2CON.6 Timer 2 external flag set when either a capture or reload is caused by a negative transition on T2EX and
RCLK T2CON.5 Receive clock flag. When set, causes the serial port to use Timer 2 overflow pulses for its receive clock
TCLK T2CON.4 Transmit clock flag. When set, causes the serial port to use Timer 2 overflow pulses for its transmit clock
EXEN2 T2CON.3 Timer 2 external enable flag. When set, allows a capture or reload to occur as a result of a negative
TR2 T2CON.2 Start/stop control for Timer 2. A logic 1 starts the timer.
C/T
2 T2CON.1 Timer or counter select. (Timer 2)
CP/RL
2 T2CON.0 Capture/Reload flag. When set, captures will occur on negative transitions at T2EX if EXEN2 = 1. When
when either RCLK or TCLK = 1.
EXEN2 = 1. When Timer 2 interrupt is enabled, EXF2 = 1 will cause the CPU to vector to the Timer 2
interrupt routine. EXF2 must be cleared by software. EXF2 does not cause an interrupt in up/down
counter mode (DCEN = 1).
in modes 1 and 3. RCLK = 0 causes Timer 1 overflow to be used for the receive clock.
in modes 1 and 3. TCLK = 0 causes Timer 1 overflows to be used for the transmit clock.
transition on T2EX if Timer 2 is not being used to clock the serial port. EXEN2 = 0 causes Timer 2 to
ignore events at T2EX.
0 = Internal timer (OSC/6 in 6-clock mode or OSC/12 in 12-clock mode)
1 = External event counter (falling edge triggered).
cleared, auto-reloads will occur either with Timer 2 overflows or negative transitions at T2EX when
EXEN2 = 1. When either RCLK = 1 or TCLK = 1, this bit is ignored and the timer is forced to auto-reload
on Timer 2 overflow .
Figure 20. Timer/Counter 2 (T2CON) Control Register
2 CP/RL2
SU01251
2002 Oct 28
35

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Table 9. Timer 2 Operating Modes
RCLK + TCLK CP/RL2 TR2 MODE
0 0 1 16-bit Auto-reload
0 1 1 16-bit Capture
1 X 1 Baud rate generator
X X 0 (off)
OSC
T2 Pin
÷ n*
Transition
Detector
C/T2 = 0
C/T
2 = 1
TR2
Control
Capture
TL2
(8 BITS)
RCAP2L RCAP2H
TH2
(8 BITS)
TF2
P89C668
Timer 2
Interrupt
T2EX Pin
Control
EXEN2
EXF2
* n = 6 in 6-clock mode, or 12 in 12-clock mode.
Figure 21. Timer 2 in Capture Mode
T2MOD Address = 0C9H Reset Value = XXXX XX00B
Not Bit Addressable
— — — — — — T2OE DCEN
Bit
76543210
Symbol Function
— Not implemented, reserved for future use.*
T2OE Timer 2 Output Enable bit.
DCEN Down Count Enable bit. When set, this allows Timer 2 to be configured as an up/down counter depending on the
value of the T2EX pin.
* User software should not write 1s to reserved bits. These bits may be used in future 8051 family products to invoke new features.
In that case, the reset or inactive value of the new bit will be 0, and its active value will be 1. The value read from a reserved bit is
indeterminate.
Figure 22. Timer 2 Mode (T2MOD) Control Register
SU01252
SU01714
2002 Oct 28
36

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
OSC
T2 PIN
T2EX PIN
* n = 6 in 6-clock mode, or 12 in 12-clock mode.
÷ n*
TRANSITION
DETECTOR
C/T2 = 0
2 = 1
C/T
TL2
(8 BITS)
CONTROL
TR2
RELOAD
RCAP2L RCAP2H
CONTROL
EXEN2
Figure 23. Timer 2 in Auto-Reload Mode (DCEN = 0)
P89C660/P89C662/P89C664/
P89C668
TH2
(8 BITS)
TF2
TIMER 2
INTERRUPT
EXF2
SU01253
T2 PIN
÷ n*
C/T2 = 0
C/T
2 = 1
CONTROL
TR2
OSC
* n = 6 in 6-clock mode, or 12 in 12-clock mode.
Figure 24. Timer 2 Auto Reload Mode (DCEN = 1)
(DOWN COUNTING RELOAD VALUE)
FFH FFH
OVERFLOW
TL2 TH2
RCAP2L RCAP2H
(UP COUNTING RELOAD VALUE) T2EX PIN
TOGGLE
COUNT
DIRECTION
1 = UP
0 = DOWN
TF2
EXF2
INTERRUPT
SU01254
2002 Oct 28
37

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
OSC
T2 Pin
T2EX Pin
Transition
Detector
C/T2 = 0
2 = 1
C/T
EXEN2
Note availability of additional external interrupt.
Control
TR2
Control
EXF2
TL2
(8-bits)
RCAP2L RCAP2H
Timer 2
Interrupt
P89C660/P89C662/P89C664/
P89C668
Timer 1
Overflow
÷ 2
“0” “1”
TH2
(8-bits)
Reload
“0”“1”
“0”“1”
SMOD
RCLK
÷ 16
TCLK
÷ 16
RX Clock
TX Clock
SU01213
Figure 25. Timer 2 in Baud Rate Generator Mode
Table 10. Timer 2 Commonly Used Generated
Baud Rates
Baud Rate Timer 2
12 clock
mode
6 clock
mode
375 k 750 k 12 MHz FF FF
9.6 k 19.2 k 12 MHz FF D9
2.8 k 5.6 k 12 MHz FF B2
2.4 k 4.8 k 12 MHz FF 64
1.2 k 2.4 k 12 MHz FE C8
300 600 12 MHz FB 1E
110 220 12 MHz F2 AF
300 600 6 MHz FD 8F
110 220 6 MHz F9 57
Baud Rate Generator Mode
Bits TCLK and/or RCLK in T2CON (see Figure 20) allow the serial
port transmit and receive baud rates to be derived from either Timer
1 or Timer 2. When TCLK = 0, Timer 1 is used as the serial port
transmit baud rate generator. When TCLK = 1, Timer 2 is used as
the serial port transmit baud rate generator. RCLK has the same
effect for the serial port receive baud rate. With these two bits, the
serial port can have different receive and transmit baud rates – one
generated by Timer 1, the other by Timer 2.
Table 10 shows commonly used baud rates and how they can be
obtained from Timer 2.
Figure 25 shows Timer 2 in baud rate generation mode. The baud
rate generation mode is similar to the auto-reload mode, in that a
rollover in TH2 causes the Timer 2 registers to be reloaded with the
16-bit value in registers RCAP2H and RCAP2L, which are preset by
software.
Osc Freq
RCAP2H RCAP2L
The baud rates in modes 1 and 3 are determined by Timer 2’s
overflow rate given below:
Modes 1 and 3 Baud Rates +
Timer 2 Overflow Rate
16
The timer can be configured for either “timer” or “counter” operation.
In many applications, it is configured for “timer” operation (C/T
2 = 0).
Timer operation is different for Timer 2 when it is being used as a
baud rate generator.
Usually, as a timer, it would increment every machine cycle (i.e.,
1
/6 the oscillator frequency in 6 clock mode, 1/12 the oscillator
frequency in 12 clock mode). As a baud rate generator, it increments
at the oscillator frequency in 6 clock mode (f
/2 in 12 clock
OSC
mode). Thus the baud rate formula is as follows:
Modes 1 and 3 Baud Rates =
Oscillator Frequency
[n* [65536 ǒ (RCAP2H, RCAP2L)]]
* n = 16 in 6 clock mode
32 in 12 clock mode
Where: (RCAP2H, RCAP2L) = The content of RCAP2H and
RCAP2L taken as a 16-bit unsigned integer.
The Timer 2 as a baud rate generator mode shown in Figure 25, is
valid only if RCLK and/or TCLK = 1 in T2CON register. Note that a
rollover in TH2 does not set TF2, and will not generate an interrupt.
Thus, Timer 2 interrupt does not have to be disabled when Timer 2
is in the baud rate generator mode. Also if the EXEN2 (T2 external
enable flag) is set, a 1-to-0 transition in T2EX (Timer/counter 2
trigger input) will set EXF2 (T2 external flag) but will not cause a
reload from (RCAP2H, RCAP2L) to (TH2,TL2). Therefore when
Timer 2 is in use as a baud rate generator, T2EX can be used as an
additional external interrupt, if needed.
2002 Oct 28
38

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
When Timer 2 is in the baud rate generator mode, one should not try
to read or write TH2 and TL2. As a baud rate generator, T imer 2 is
incremented every state time (f
T2; under these conditions, a read or write of TH2 or TL2 may not
be accurate. The RCAP2 registers may be read, but should not be
written to, because a write might overlap a reload, and cause write
and/or reload errors. The timer should be turned off (clear TR2)
before accessing Timer 2 or RCAP2 registers.
Summary Of Baud Rate Equations: Timer 2 is in baud rate
generating mode. If Timer 2 is being clocked through pin T2(P1.0)
the baud rate is:
Baud Rate
If Timer 2 is being clocked internally, the baud rate is:
Baud Rate
Timer 2 Overflow Rate
[n* [65536 (RCAP2H, RCAP2L)]]
* n = 16 in 6 clock mode
/2) or asynchronously from pin
OSC
16
f
OSC
32 in 12 clock mode
Where f
To obtain the reload value for RCAP2H and RCAP2L, the above
equation can be rewritten as:
RCAP2H,RCAP2L 65536
Timer/Counter 2 Set-up
Except for the baud rate generator mode, the values given for T2CON
do not include the setting of the TR2 bit. Therefore, bit TR2 must be
set, separately, to turn the timer on. See Table 11 for set-up of Timer 2
as a timer. Also see Table 12 for set-up of Timer 2 as a counter.
= Oscillator Frequency
OSC
n* Baud Rate
Table 11. Timer 2 as a Timer
T2CON
MODE
16-bit Auto-Reload 00H 08H
16-bit Capture 01H 09H
Baud rate generator receive and transmit same baud rate 34H 36H
Receive only 24H 26H
Transmit only 14H 16H
INTERNAL CONTROL
(Note 1)
EXTERNAL CONTROL
P89C668
f
OSC
(Note 2)
Table 12. Timer 2 as a Counter
TMOD
MODE
16-bit 02H 0AH
Auto-Reload 03H 0BH
NOTES:
1. Capture/reload occurs only on timer/counter overflow.
2. Capture/reload occurs on timer/counter overflow and a 1-to-0 transition on T2EX (P1.1) pin except when Timer 2 is used in the baud rate
generator mode.
INTERNAL CONTROL
(Note 1)
EXTERNAL CONTROL
(Note 2)
2002 Oct 28
39

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
FULL-DUPLEX ENHANCED UART
Standard UART operation
A full-duplex serial port can transmit and receive simultaneously. It is
also receive-buffered, meaning it can commence reception of a
second byte before a previously received byte has been read from
the register. (However, if the first byte still hasn’t been read by the
time reception of the second byte is complete, one of the bytes will
be lost.) The serial port receive and transmit registers are both
accessed at Special Function Register SBUF. Writing to SBUF loads
the transmit register, and reading SBUF accesses a physically
separate receive register.
The serial port can operate in 4 modes:
Mode 0: Serial data enters and exits through RxD. TxD outputs
the shift clock. 8 bits are transmitted/received (LSB first).
The baud rate is fixed at 1/12 the oscillator frequency in
12-clock mode or 1/6 the oscillator frequency in 6-clock
mode.
Mode 1: 10 bits are transmitted (through TxD) or received
(through RxD): a start bit (0), 8 data bits (LSB first), and
a stop bit (1). On receive, the stop bit goes into RB8 in
Special Function Register SCON. The baud rate is
variable.
Mode 2: 1 1 bits are transmitted (through TxD) or received
(through RxD): a start bit (0), 8 data bits (LSB first), a
programmable 9th data bit, and a stop bit (1). On
Transmit, the 9th data bit (TB8 in SCON) can be
assigned the value of 0 or 1. Or, for example, the parity
bit (P, in the PSW) could be moved into TB8. On receive,
the 9th data bit goes into RB8 in Special Function
Register SCON, while the stop bit is ignored. The baud
rate is programmable to either 1/32 or 1/64 the oscillator
frequency in 12-clock mode or 1/16 or 1/32 the oscillator
frequency in 6-clock mode.
Mode 3: 1 1 bits are transmitted (through TxD) or received
(through RxD): a start bit (0), 8 data bits (LSB first), a
programmable 9th data bit, and a stop bit (1). In fact,
Mode 3 is the same as Mode 2 in all respects except
baud rate. The baud rate in Mode 3 is variable.
In all four modes, transmission is initiated by any instruction that
uses SBUF as a destination register. Reception is initiated in Mode 0
by the condition RI = 0 and REN = 1. Reception is initiated in the
other modes by the incoming start bit if REN = 1.
Multiprocessor Communications
Modes 2 and 3 have a special provision for multiprocessor
communications. In these modes, 9 data bits are received. The 9th
bit goes into RB8. Then comes a stop bit. The port can be
programmed such that when the stop bit is received, the serial port
interrupt will be activated only if RB8 = 1. This feature is enabled by
setting bit SM2 in SCON. A way to use this feature in multiprocessor
systems is as follows:
When the master processor wants to transmit a block of data to one
of several slaves, it first sends out an address byte which identifies
the target slave. An address byte differs from a data byte in that the
9th bit is 1 in an address byte and 0 in a data byte. With SM2 = 1, no
slave will be interrupted by a data byte. An address byte, however,
will interrupt all slaves, so that each slave can examine the received
byte and see if it is being addressed. The addressed slave will clear
P89C660/P89C662/P89C664/
P89C668
its SM2 bit and prepare to receive the data bytes that will be coming.
The slaves that weren’t being addressed leave their SM2s set and
go on about their business, ignoring the coming data bytes.
SM2 has no effect in Mode 0. In Mode 1, it can be used to check the
validity of the stop bit. In a Mode 1 reception, if SM2 = 1, the receive
interrupt will not be activated unless a valid stop bit is received.
Serial Port Control Register
The serial port control and status register is the Special Function
Register SCON, shown in Figure 26. This register contains not only
the mode selection bits, but also the 9th data bit for transmit and
receive (TB8 and RB8), and the serial port interrupt bits (TI and RI).
Baud Rates
The baud rate in Mode 0 is fixed: Mode 0 Baud Rate = Oscillator
Frequency / 12 (12-clock mode) or / 6 (6-clock mode). The baud
rate in Mode 2 depends on the value of bit SMOD in Special
Function Register PCON. If SMOD = 0 (which is the value on reset),
and the port pins in 12-clock mode, the baud rate is 1/64 the
oscillator frequency . If SMOD = 1, the baud rate is 1/32 the oscillator
frequency. In 6-clock mode, the baud rate is 1/32 or 1/16 the
oscillator frequency, respectively.
Mode 2 Baud Rate =
SMOD
2
(Oscillator Frequency)
n
Where:
n = 64 in 12-clock mode, 32 in 6-clock mode
The baud rates in Modes 1 and 3 are determined by the Timer 1 or
Timer 2 overflow rate.
Using Timer 1 to Generate Baud Rates
When Timer 1 is used as the baud rate generator (T2CON.5 = 0,
T2CON.4 = 0), the baud rates in Modes 1 and 3 are determined by
the Timer 1 overflow rate and the value of SMOD as follows:
Mode 1, 3 Baud Rate =
SMOD
2
(Timer 1 Overflow Rate)
n
Where:
n = 32 in 12-clock mode, 16 in 6-clock mode
The Timer 1 interrupt should be disabled in this application. The
Timer itself can be configured for either “timer” or “counter”
operation, and in any of its 3 running modes. In the most typical
applications, it is configured for “timer” operation, in the auto-reload
mode (high nibble of TMOD = 0010B). In that case the baud rate is
given by the formula:
Mode 1, 3 Baud Rate =
SMOD
2
Where:
n = 32 in 12-clock mode, 16 in 6-clock mode
One can achieve very low baud rates with Timer 1 by leaving the
Timer 1 interrupt enabled, and configuring the Timer to run as a
16-bit timer (high nibble of TMOD = 0001B), and using the Timer 1
interrupt to do a 16-bit software reload. Figure 27 lists various
commonly used baud rates and how they can be obtained from
Timer 1.
Oscillator Frequency
n
12 [256–(TH1)]
2002 Oct 28
40

Philips Semiconductors Product data
f
SMOD
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
SCON Address = 98H Reset Value = 00H
Bit Addressable
Where SM0, SM1 specify the serial port mode, as follows:
SM0 SM1 Mode Description Baud Rate
0 0 0 shift register f
0 1 1 8-bit UART variable
1 0 2 9-bit UART f
1 1 3 9-bit UART variable
SM2 Enables the multiprocessor communication feature in Modes 2 and 3. In Mode 2 or 3, if SM2 is set to 1, then Rl will not be
activated if the received 9th data bit (RB8) is 0. In Mode 1, if SM2=1 then RI will not be activated if a valid stop bit was not
received. In Mode 0, SM2 should be 0.
REN Enables serial reception. Set by software to enable reception. Clear by software to disable reception.
TB8 The 9th data bit that will be transmitted in Modes 2 and 3. Set or clear by software as desired.
RB8 In Modes 2 and 3, is the 9th data bit that was received. In Mode 1, it SM2=0, RB8 is the stop bit that was received. In Mode 0,
RB8 is not used.
TI Transmit interrupt flag. Set by hardware at the end of the 8th bit time in Mode 0, or at the beginning of the stop bit in the other
modes, in any serial transmission. Must be cleared by software.
RI Receive interrupt flag. Set by hardware at the end of the 8th bit time in Mode 0, or halfway through the stop bit time in the other
modes, in any serial reception (except see SM2). Must be cleared by software.
76543210
SM0 SM1 SM2 REN TB8 RB8 TI RI
/12 (12-clock mode) or f
OSC
/64 or f
OSC
Figure 26. Serial Port Control (SCON) Register
/32 (12-clock mode) or f
OSC
OSC
P89C660/P89C662/P89C664/
P89C668
/6 (6-clock mode)
OSC
/32 or f
/16 (6-clock mode)
OSC
SU01626
Baud Rate
Mode 12-clock mode 6-clock mode
Mode 0 Max 1.67 MHz 3.34 MHz 20 MHz X X X X
Mode 2 Max 625 k 1250 k 20 MHz 1 X X X
Mode 1, 3 Max 104.2 k 208.4 k 20 MHz 1 0 2 FFH
Mode 1, 3 19.2 k 38.4 k 1 1.059 MHz 1 0 2 FDH
9.6 k 19.2 k 11.059 MHz 0 0 2 FDH
4.8 k 9.6 k 11.059 MHz 0 0 2 FAH
2.4 k 4.8 k 11.059 MHz 0 0 2 F4H
1.2 k 2.4 k 11.059 MHz 0 0 2 E8H
137.5 275 11.986 MHz 0 0 2 1DH
110 220 6 MHz 0 0 2 72H
110 220 12 MHz 0 0 1 FEEBH
Figure 27. Timer 1 Generated Commonly Used Baud Rates
More About Mode 0
Serial data enters and exits through RxD. TxD outputs the shift
clock. Eight data bits are transmitted/received (LSB first). The baud
rate is fixed at 1/12 the oscillator frequency (12-clock mode) or 1/6
the oscillator frequency (6-clock mode).
Figure 28 shows a simplified functional diagram of the serial port in
Mode 0, and associated timing.
Transmission is initiated by any instruction that uses SBUF as a
destination register . The “write to SBUF” signal at S6P2 also loads a
1 into the 9th position of the transmit shift register and tells the TX
Control block to commence a transmission. The internal timing is
such that one full machine cycle will elapse between “write to SBUF”
and activation of SEND.
SEND enables the output of the shift register to the alternate output
function line of P3.0 and also enable SHIFT CLOCK to the alternate
output function line of P3.1. SHIFT CLOCK is low during S3, S4, and
S5 of every machine cycle, and high during S6, S1, and S2. At
OSC
S6P2 of every machine cycle in which SEND is active, the contents
of the transmit shift are shifted to the right one position.
As data bits shift out to the right, zeros come in from the left. When
the MSB of the data byte is at the output position of the shift register,
then the 1 that was initially loaded into the 9th position, is just to the
left of the MSB, and all positions to the left of that contain zeros.
This condition flags the TX Control block to do one last shift and
then deactivate SEND and set T1. Both of these actions occur at
S1P1 of the 10th machine cycle after “write to SBUF.”
Reception is initiated by the condition REN = 1 and R1 = 0. At S6P2
of the next machine cycle, the RX Control unit writes the bits
11111110 to the receive shift register, and activates RECEIVE in the
next clock phase.
RECEIVE enable SHIFT CLOCK to the alternate output function line
of P3.1. SHIFT CLOCK makes transitions at S3P1 and S6P1 of
every machine cycle. At S6P2 of every machine cycle in which
RECEIVE is active, the contents of the receive shift register are
C/T Mode Reload Value
Timer 1
2002 Oct 28
41

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
shifted to the left by one position. The value that comes in, from the
right, is the value that was sampled at the P3.0 pin at S5P2 of the
same machine cycle.
As data bits come in from the right, 1s shift out to the left. When the
0 that was initially loaded into the rightmost position arrives at the
leftmost position in the shift register, it flags the RX Control block to
do one last shift and load SBUF. At S1P1 of the 10th machine cycle,
after the write to SCON that cleared RI, RECEIVE is cleared as RI is
set.
More About Mode 1
Ten bits are transmitted (through TxD), or received (through RxD): a
start bit (0), 8 data bits (LSB first), and a stop bit (1). On receive, the
stop bit goes into RB8 in SCON. In the 80C51 the baud rate is
determined by the Timer 1 or Timer 2 overflow rate.
Figure 29 shows a simplified functional diagram of the serial port in
Mode 1, and associated timings for transmit receive.
Transmission is initiated by any instruction that uses SBUF as a
destination register . The “write to SBUF” signal also loads a 1 into
the 9th bit position of the transmit shift register and flags the TX
Control unit that a transmission is requested. Transmission actually
commences at S1P1 of the machine cycle following the next rollover
in the divide-by-16 counter. (Thus, the bit times are synchronized to
the divide-by-16 counter, not to the “write to SBUF” signal.)
The transmission begins with activation of SEND which puts the
start bit at TxD. One bit time later, DATA is activated, which enables
the output bit of the transmit shift register to TxD. The first shift pulse
occurs one bit time after that.
As data bits shift out to the right, zeros are clocked in from the left.
When the MSB of the data byte is at the output position of the shift
register, the 1 that was initially loaded into the 9th position is just to
the left of the MSB, and all positions to the left of that contain zeros.
This condition flags the TX Control unit to do one last shift and then
deactivate SEND and set TI. This occurs at the 10th divide-by-16
rollover after “write to SBUF.”
Reception is initiated by a detected 1-to-0 transition at RxD. For this
purpose RxD is sampled at a rate of 16 times whatever baud rate
has been established. When a transition is detected, the
divide-by-16 counter is immediately reset, and 1FFH is written into
the input shift register. Resetting the divide-by-16 counter aligns its
rollovers with the boundaries of the incoming bit times.
The 16 states of the counter divide each bit time into 16ths. At the
7th, 8th, and 9th counter states of each bit time, the bit detector
samples the value of RxD. The value accepted is the value that was
seen in at least 2 of the 3 samples. This is done for noise rejection.
If the value accepted during the first bit time is not 0, the receive
circuits are reset and the unit goes back to looking for another 1-to-0
transition. This is to provide rejection of false start bits. If the start bit
proves valid, it is shifted into the input shift register, and reception of
the rest of the frame will proceed.
As data bits come in from the right, 1s shift out to the left. When the
start bit arrives at the leftmost position in the shift register (which in
mode 1 is a 9-bit register), it flags the RX Control block to do one
last shift, load SBUF and RB8, and set RI. The signal to load SBUF
and RB8, and to set RI, will be generated if, and only if, the following
conditions are met at the time the final shift pulse is generated:
1. R1 = 0, and
2. Either SM2 = 0, or the received stop bit = 1.
If either of these two conditions is not met, the received frame is
irretrievably lost. If both conditions are met, the stop bit goes into
RB8, the 8 data bits go into SBUF, and RI is activated. At this time,
P89C660/P89C662/P89C664/
P89C668
whether the above conditions are met or not, the unit goes back to
looking for a 1-to-0 transition in RxD.
More About Modes 2 and 3
Eleven bits are transmitted (through TxD), or received (through
RxD): a start bit (0), 8 data bits (LSB first), a programmable 9th data
bit, and a stop bit (1). On transmit, the 9th data bit (TB8) can be
assigned the value of 0 or 1. On receive, the 9th data bit goes into
RB8 in SCON. The baud rate is programmable to either 1/32 or 1/64
(12-clock mode), or 1/16 or 1/32 (6-clock mode) of the oscillator
frequency in Mode 2. Mode 3 may have a variable baud rate
generated from Timer 1 or Timer 2.
Figures 30 and 31 show a functional diagram of the serial port in
Modes 2 and 3. The receive portion is exactly the same as in Mode
1. The transmit portion differs from Mode 1 only in the 9th bit of the
transmit shift register.
Transmission is initiated by any instruction that uses SBUF as a
destination register . The “write to SBUF” signal also loads TB8 into
the 9th bit position of the transmit shift register and flags the TX
Control unit that a transmission is requested. Transmission
commences at S1P1 of the machine cycle following the next rollover
in the divide-by-16 counter (thus, the bit times are synchronized to
the divide-by-16 counter, not to the “write to SBUF” signal).
The transmission begins with activation of SEND, which puts the
start bit at TxD. One bit time later, DATA is activated, which enables
the output bit of the transmit shift register to TxD. The first shift pulse
occurs one bit time after that. The first shift clocks a 1 (the stop bit)
into the 9th bit position of the shift register. Thereafter, only zeros
are clocked in. Thus, as data bits shift out to the right, zeros are
clocked in from the left. When TB8 is at the output position of the
shift register, then the stop bit is just to the left of TB8, and all
positions to the left of that contain zeros. This condition flags the TX
Control unit to do one last shift and then deactivate SEND and set
TI. This occurs at the 11th divide-by-16 rollover after “write to SBUF.”
Reception is initiated by a detected 1-to-0 transition at RxD. For this
purpose RxD is sampled at a rate of 16 times whatever baud rate
has been established. When a transition is detected, the
divide-by-16 counter is immediately reset, and 1FFH is written to the
input shift register.
At the 7th, 8th, and 9th counter states of each bit time, the bit
detector samples the value of RxD. The value accepted is the value
that was seen in at least 2 of the 3 samples. If the value accepted
during the first bit time is not 0, the receive circuits are reset and the
unit goes back to looking for another 1-to-0 transition. If the start bit
proves valid, it is shifted into the input shift register, and reception of
the rest of the frame will proceed.
As data bits come in from the right, 1s shift out to the left. When the
start bit arrives at the leftmost position in the shift register (which in
Modes 2 and 3 is a 9-bit register), it flags the RX Control block to do
one last shift, load SBUF and RB8, and set RI.
The signal to load SBUF and RB8, and to set RI, will be generated
if, and only if, the following conditions are met at the time the final
shift pulse is generated:
1. RI = 0, and
2. Either SM2 = 0, or the received 9th data bit = 1.
If either of these conditions is not met, the received frame is
irretrievably lost, and RI is not set. If both conditions are met, the
received 9th data bit goes into RB8, and the first 8 data bits go into
SBUF. One bit time later, whether the above conditions were met or
not, the unit goes back to looking for a 1-to-0 transition at the RxD
input.
2002 Oct 28
42

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
80C51 Internal Bus
Write
to
SBUF
S6
REN
RI
Serial
Port
Interrupt
S
D Q
CL
SBUF
Zero Detector
TX Control
TX Clock Send
Start
LSB
T1
R1
RX Control
1 1 1 1 1 1 1 0
Input Shift Register
Load
SBUF
ReceiveRX Clock
ShiftStart
Shift
P89C660/P89C662/P89C664/
P89C668
RxD
P3.0 Alt
Output
Function
Shift
Clock
MSB
Shift
RxD
P3.0 Alt
Input
Function
TxD
P3.1 Alt
Output
Function
LSB
Read
SBUF
S4 . . S1 S6. . . . S1 S6. . . . S1 S6. . . . S1 S6. . . . S1 S6. . . . S1 S6. . . . S1 S6. . . . S1 S6. . . . S1 S6. . . . S1 S6. . . . S1
ALE
Write to SBUF
Send
Shift
RxD (Data Out) D0 D1 D2 D3 D4 D5 D6 D7
TxD (Shift Clock)
TI
RI
Receive
Shift
RxD (Data In)
TxD (Shift Clock)
S6P2
S3P1 S6P1
Write to SCON (Clear RI)
D0 D1 D2 D3 D4 D5 D6
S5P2
SBUF
80C51 Internal Bus
MSB
D7
Figure 28. Serial Port Mode 0
Transmit
Receive
SU00539
2002 Oct 28
43

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
SMOD = 0
Timer 1
Overflow
÷ 2
SMOD = 1
Write
to
SBUF
Serial
Port
Interrupt
÷ 16
TB8
S
D Q
CL
TX Clock Send
÷ 16
80C51 Internal Bus
SBUF
Zero Detector
TX Control
T1
P89C660/P89C662/P89C664/
Shift
DataStart
P89C668
TxD
TX
Clock
Write to SBUF
Data
Shift
TxD
TI
RX
Clock
RxD
Bit Detector
Sample Times
Shift
RI
RxD
Send
S1P1
Start Bit
÷ 16 Reset
Start
Bit
1-to-0
Transition
Detector
Sample
RX Clock RI
Load
SBUF
RX Control
Input Shift Register
SBUF
80C51 Internal Bus
(9 Bits)
Start
Bit Detector
Read
SBUF
Figure 29. Serial Port Mode 1
Load
SBUF
1FFH
Shift
Shift
Transmit
Stop BitD0 D1 D2 D3 D4 D5 D6 D7
Stop BitD0 D1 D2 D3 D4 D5 D6 D7
Receive
SU00540
2002 Oct 28
44

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
80C51 Internal Bus
TB8
Write
to
Mode 2
÷ 2
Phase 2 Clock
(1/2 f
)
OSC
SMOD = 1
SMOD = 0
(SMOD is
PCON.7)
SBUF
1-to-0
Transition
Detector
÷ 16
Serial
Port
Interrupt
Sample
S
D Q
CL
Stop Bit
Gen.
Start
TX Clock Send
÷ 16
RX Clock
Start
SBUF
Zero Detector
TX Control
T1
R1
RX Control
P89C660/P89C662/P89C664/
P89C668
Shift
Data
Load
SBUF
Shift
1FFH
TxD
TX
Clock
Write to SBUF
Data
Shift
TxD
TI
Stop Bit Gen.
RX
Clock
RxD
Bit Detector
Sample Times
Shift
RI
RxD
Send
S1P1
Start Bit
÷ 16 Reset
Start
Bit
Bit Detector
Input Shift Register
(9 Bits)
Load
SBUF
SBUF
Read
SBUF
80C51 Internal Bus
Figure 30. Serial Port Mode 2
Shift
TB8
RB8
Transmit
Stop BitD0 D1 D2 D3 D4 D5 D6 D7
Stop BitD0 D1 D2 D3 D4 D5 D6 D7
Receive
SU00541
2002 Oct 28
45

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
SMOD = 0
Timer 1
Overflow
÷ 2
SMOD = 1
Write
to
SBUF
Serial
Port
Interrupt
Transition
Detector
1-to-0
÷ 16
Sample
TB8
S
D Q
CL
TX Clock Send
÷ 16
Start
Zero Detector
RX Clock
80C51 Internal Bus
SBUF
TX Control
T1
R1
RX Control
P89C660/P89C662/P89C664/
Load
SBUF
1FFH
DataStart
Shift
Shift
P89C668
TxD
TX
Clock
Write to SBUF
Data
Shift
TxD
TI
Stop Bit Gen.
RX
Clock
RxD
Bit Detector
Sample Times
Shift
RI
RxD
Send
S1P1
Start Bit
÷ 16 Reset
Start
Bit
Bit Detector
Input Shift Register
(9 Bits)
Load
SBUF
SBUF
Read
SBUF
80C51 Internal Bus
Figure 31. Serial Port Mode 3
Shift
TB8
RB8
Transmit
Stop BitD0 D1 D2 D3 D4 D5 D6 D7
Stop BitD0 D1 D2 D3 D4 D5 D6 D7
Receive
SU00542
2002 Oct 28
46

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Enhanced UART
In addition to the standard operation, the UART can perform framing
error detect by looking for missing stop bits, and automatic address
recognition. The UART also fully supports multiprocessor
communication as does the standard 80C51 UART.
When used for framing error detect, the UART looks for missing stop
bits in the communication. A missing bit will set the FE bit in the
S0CON register. The FE bit shares the S0CON.7 bit with SM0, and
the function of S0CON.7 is determined by PCON.6 (SMOD0) (see
Figure 32). If SMOD0 is set then S0CON.7 functions as FE.
S0CON.7 functions as SM0 when SMOD0 is cleared. When used as
FE, S0CON.7 can only be cleared by software (refer to Figure 33).
Automatic Address Recognition
Automatic Address Recognition is a feature which allows the UART
to recognize certain addresses in the serial bit stream by using
hardware to make the comparisons. This feature saves a great deal
of software overhead by eliminating the need for the software to
examine every serial address which passes by the serial port. This
feature is enabled by setting the SM2 bit in S0CON. In the 9-bit
UART modes (mode 2 and mode 3), the Receive Interrupt flag (RI)
will be automatically set when the received byte contains either the
“Given” address or the “Broadcast” address. The 9-bit mode
requires that the 9th information bit is a 1 to indicate that the
received information is an address and not data. Automatic address
recognition is shown in Figure 34.
The 8-bit mode is called Mode 1. In this mode, the RI flag will be set
if SM2 is enabled and the information received has a valid stop bit
following the 8 address bits, and the information is either a Given or
Broadcast address.
Mode 0 is the Shift Register mode and SM2 is ignored.
Using the Automatic Address Recognition feature allows a master to
selectively communicate with one or more slaves by invoking the
Given slave address or addresses. All of the slaves may be
contacted by using the Broadcast address. Two special Function
Registers are used to define the slave’s address, SADDR, and the
address mask, SADEN. SADEN is used to define which bits in the
SADDR are to be used and which bits are “don’t care”. The SADEN
mask can be logically ANDed with the SADDR to create the “Given”
address which the master will use for addressing each of the slaves.
Use of the Given address allows multiple slaves to be recognized
while excluding others. The following examples will help to show the
versatility of this scheme:
Slave 0 SADDR = 1100 0000
SADEN = 1111 1101
Given = 1100 00X0
P89C660/P89C662/P89C664/
P89C668
Slave 1 SADDR = 1100 0000
SADEN = 1111 1110
Given = 1100 000X
In the above example SADDR is the same and the SADEN data is
used to differentiate between the two slaves. Slave 0 requires a 0 in
bit 0 and it ignores bit 1. Slave 1 requires a 0 in bit 1 and bit 0 is
ignored. A unique address for Slave 0 would be 1100 0010 since
slave 1 requires a 0 in bit 1. A unique address for slave 1 would be
1100 0001 since a 1 in bit 0 will exclude slave 0. Both slaves can be
selected at the same time by an address which has bit 0 = 0 (for
slave 0) and bit 1 = 0 (for slave 1). Thus, both could be addressed
with 1100 0000.
In a more complex system the following could be used to select
slaves 1 and 2 while excluding slave 0:
Slave 0 SADDR = 1100 0000
SADEN = 1111 1001
Given = 1100 0XX0
Slave 1 SADDR = 1110 0000
SADEN = 1111 1010
Given = 1110 0X0X
Slave 2 SADDR = 1110 0000
SADEN = 1111 1100
Given = 1110 00XX
In the above example the differentiation among the 3 slaves is in the
lower 3 address bits. Slave 0 requires that bit 0 = 0 and it can be
uniquely addressed by 1110 01 10. Slave 1 requires that bit 1 = 0 and
it can be uniquely addressed by 1110 and 0101. Slave 2 requires
that bit 2 = 0 and its unique address is 1110 0011. To select Slaves 0
and 1 and exclude Slave 2 use address 1110 0100, since it is
necessary to make bit 2 = 1 to exclude slave 2.
The Broadcast Address for each slave is created by taking the
logical OR of SADDR and SADEN. Zeros in this result are trended
as don’t-cares. In most cases, interpreting the don’t-cares as ones,
the broadcast address will be FF hexadecimal.
Upon reset, SADDR (SFR address 0A9H) and SADEN (SFR
address 0B9H) are leaded with 0s. This produces a given address
of all “don’t cares” as well as a Broadcast address of all “don’t
cares”. This effectively disables the Automatic Addressing mode and
allows the microcontroller to use standard 80C51 type UART drivers
which do not make use of this feature.
2002 Oct 28
47

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
S0CON Address = 98H
P89C660/P89C662/P89C664/
P89C668
Reset Value = 0000 0000B
Bit Addressable
SM0/FE SM1 SM2 REN TB8 RB8 Tl Rl
Bit: 76543210
(SMOD0 = 0/1)*
Symbol Function
FE Framing Error bit. This bit is set by the receiver when an invalid stop bit is detected. The FE bit is not cleared by valid
frames but should be cleared by software. The SMOD0 bit must be set to enable access to the FE bit.
SM0 Serial Port Mode Bit 0, (SMOD0 must = 0 to access bit SM0)
SM1 Serial Port Mode Bit 1
SM0 SM1 Mode Description Baud Rate**
0 0 0 shift register f
/6 (6 clock mode) or f
OSC
/12 (12 clock mode)
OSC
0 1 1 8-bit UART variable
1 0 2 9-bit UART f
OSC
f
OSC
/32 or f
/64 or f
/16 (6 clock mode) or
OSC
/32 (12 clock mode)
OSC
1 1 3 9-bit UART variable
SM2 Enables the Automatic Address Recognition feature in Modes 2 or 3. If SM2 = 1 then Rl will not be set unless the
received 9th data bit (RB8) is 1, indicating an address, and the received byte is a Given or Broadcast Address.
In Mode 1, if SM2 = 1 then Rl will not be activated unless a valid stop bit was received, and the received byte is a
Given or Broadcast Address. In Mode 0, SM2 should be 0.
REN Enables serial reception. Set by software to enable reception. Clear by software to disable reception.
TB8 The 9th data bit that will be transmitted in Modes 2 and 3. Set or clear by software as desired.
RB8 In modes 2 and 3, the 9th data bit that was received. In Mode 1, if SM2 = 0, RB8 is the stop bit that was received.
In Mode 0, RB8 is not used.
Tl Transmit interrupt flag. Set by hardware at the end of the 8th bit time in Mode 0, or at the beginning of the stop bit in the
other modes, in any serial transmission. Must be cleared by software.
Rl Receive interrupt flag. Set by hardware at the end of the 8th bit time in Mode 0, or halfway through the stop bit time in
the other modes, in any serial reception (except see SM2). Must be cleared by software.
NOTE:
*SMOD0 is located at PCON6.
**f
= oscillator frequency
OSC
Figure 32. S0CON: Serial Port Control Register
SU01451
2002 Oct 28
48

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
D0 D1 D2 D3 D4 D5 D6 D7 D8
START
BIT
SM0 / FE SM1 SM2 REN TB8 RB8 TI RI
SMOD1 SMOD0 – POF LVF GF0 GF1 IDL
0 : S0CON.7 = SM0
1 : S0CON.7 = FE
Figure 33. UART Framing Error Detection
DATA BYTE
SET FE BIT IF STOP BIT IS 0 (FRAMING ERROR)
SM0 TO UART MODE CONTROL
P89C660/P89C662/P89C664/
P89C668
ONLY IN
MODE 2, 3
S0CON
(98H)
PCON
(87H)
STOP
BIT
SU01452
D0 D1 D2 D3 D4 D5 D6 D7 D8
SM0 SM1 SM2 REN TB8 RB8 TI RI
1
1
RECEIVED ADDRESS D0 TO D7
PROGRAMMED ADDRESS
IN UART MODE 2 OR MODE 3 AND SM2 = 1:
INTERRUPT IF REN=1, RB8=1 AND “RECEIVED ADDRESS” = “PROGRAMMED ADDRESS”
– WHEN OWN ADDRESS RECEIVED, CLEAR SM2 TO RECEIVE DATA BYTES
– WHEN ALL DATA BYTES HAVE BEEN RECEIVED: SET SM2 TO WAIT FOR NEXT ADDRESS.
1
0
11 X
COMPARATOR
Figure 34. UART Multiprocessor Communication, Automatic Address Recognition
S0CON
(98H)
SU01453
2002 Oct 28
49

Philips Semiconductors Product data
INTERRUPT PRIORITY LEVEL
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Interrupt Priority Structure
The P89C660/662/664/668 has an 8 source four-level interrupt
structure (see Table 13).
There are 4 SFRs associated with the four-level interrupt. They are
the IE, IP, IEN1, and IPH (see Figures 35, 36, 37, and 38). The IPH
(Interrupt Priority High) register makes the four-level interrupt
structure possible. The IPH is located at SFR address B7H. The
structure of the IPH register and a description of its bits is shown in
Figure 37.
The function of the IPH SFR, when combined with the IP SFR,
determines the priority of each interrupt. The priority of each
interrupt is determined as shown in the following table:
PRIORITY BITS
IPH.x IP.x
0 0 Level 0 (lowest priority)
0 1 Level 1
1 0 Level 2
1 1 Level 3 (highest priority)
P89C660/P89C662/P89C664/
P89C668
The priority scheme for servicing the interrupts is the same as that
for the 80C51, except that there are four interrupt levels rather than
two (as on the 80C51). An interrupt will be serviced as long as an
interrupt of equal or higher priority is not already being serviced. If
an interrupt of equal or higher level priority is being serviced, the
new interrupt will wait until it is finished before being serviced. If a
lower priority level interrupt is being serviced, it will be stopped and
the new interrupt serviced. When the new interrupt is finished, the
lower priority level interrupt that was stopped will be completed.
Table 13. Interrupt Table
SOURCE POLLING PRIORITY REQUEST BITS HARDWARE CLEAR? VECTOR ADDRESS
X0 1 IE0 N (L)1Y (T)
SI01 (I2C) 2 — N 2BH
T0 3 TP0 Y 0BH
X1 4 IE1 N (L) Y (T) 13H
T1 5 TF1 Y 1BH
SP 6 RI, TI N 23H
T2 7 TF2, EXF2 N 3BH
PCA 8 CF, CCFn
NOTES:
1. L = Level activated
2. T = Transition activated
BIT SYMBOL FUNCTION
IEN0.7 EA Global disable bit. If EA = 0, all interrupts are disabled. If EA = 1, each interrupt can be individually
IEN0.6 EC PCA interrupt enable bit
IEN0.5 ES1 I
IEN0.4 ES0 Serial Port interrupt enable bit.
IEN0.3 ET1 Timer 1 interrupt enable bit.
IEN0.2 EX1 External interrupt 1 enable bit.
IEN0.1 ET0 Timer 0 interrupt enable bit.
IEN0.0 EX0 External interrupt 0 enable bit.
n = 0–4
Enable Bit = 1 enables the interrupt.
Enable Bit = 0 disables it.
enabled or disabled by setting or clearing its enable bit.
2
C interrupt enable bit.
Figure 35. IE Registers
2
N 33H
01234567
ET0EX1ET1ES0ES1ECEA
EX0IEN0 (0A8H)
03H
SU01454
2002 Oct 28
50

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Priority Bit = 1 assigns high priority
Priority Bit = 0 assigns low priority
BIT SYMBOL FUNCTION
IP.7 PT2 Timer 2 interrupt priority bit.
IP.6 PPC PCA interrupt priority bit
IP.5 PS1 Serial I/O1 (I
IP.4 PS0 Serial Port interrupt priority bit.
IP.3 PT1 Timer 1 interrupt priority bit.
IP.2 PX1 External interrupt 1 priority bit.
IP.1 PT0 Timer 0 interrupt priority bit.
IP.0 PX0 External interrupt 0 priority bit.
2
C) interrupt priority bit.
Figure 36. IP Registers
P89C660/P89C662/P89C664/
P89C668
01234567
PT0PX1PT1PS0PS1PPCPT2
PT0HPX1HPT1HPS0HPS1HPPCHPT2H
PX0IP (0B8H)
SU01455
01234567
PX0HIPH (B7H)
Priority Bit = 1 assigns higher priority
Priority Bit = 0 assigns lower priority
BIT SYMBOL FUNCTION
IPH.7 PT2H Timer 2 interrupt priority bit high.
IPH.6 PPCH PCA interrupt priority bit
IPH.5 PS1H Serial I/O (I
IPH.4 PS0H Serial Port interrupt priority bit high.
IPH.3 PT1H Timer 1 interrupt priority bit high.
IPH.2 PX1H External interrupt 1 priority bit high.
IPH.1 PT0H Timer 0 interrupt priority bit high.
IPH.0 PX0H External interrupt 0 priority bit high.
Enable Bit = 1 enables the interrupt
Enable Bit = 0 disables the interrupt
BIT SYMBOL FUNCTION
IEN1.7 —
IEN1.6 —
IEN1.5 —
IEN1.4 —
IEN1.3 —
IEN1.2 —
IEN1.1 —
IEN1.0 ET2 Timer 2 interrupt enable bit.
2
C) interrupt priority bit high.
Figure 37. IPH Registers
Figure 38. IEN1 Registers
SU01456
01234567
———————
ET2IEN1 (E8H)
SU01095
2002 Oct 28
51

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Reduced EMI Mode
The AO bit (AUXR.0) in the AUXR register when set disables the
ALE output.
Reduced EMI Mode
AUXR (8EH)
765432 1 0
– – – – – – EXTRAM AO
AUXR.1 EXTRAM (See more detailed description in
AUXR.0 AO Figure 53.)
Dual DPTR
The dual DPTR structure (see Figure 39) is a way by which the chip
will specify the address of an external data memory location. There
are two 16-bit DPTR registers that address the external memory,
and a single bit called DPS (AUXR1.0), that allows the program
code to switch between them.
•New Register Name: AUXR1#
•SFR Address: A2H
•Reset Value: xxxxx0x0B
AUXR1 (A2H)
765 43210
– – ENBOOT – GF2 0 – DPS
Where:
DPS (AUXR1.0), enables switching between DPTR0 and DPTR1.
Select Reg DPS
DPTR0 0
DPTR1 1
The DPS bit status should be saved by software when switching
between DPTR0 and DPTR1.
The GF2 bit is a general purpose user-defined flag. Note that bit 2 is
not writable and is always read as a zero. This allows the DPS bit to
be quickly toggled simply by executing an INC AUXR1 instruction
without affecting the GF2 bit.
P89C660/P89C662/P89C664/
P89C668
The ENBOOT bit determines whether the BOOTROM is enabled
or disabled. This bit will automatically be set if the status byte is
non zero during reset or PSEN
EA > V
cleared during reset.
DPTR Instructions
The instructions, that refer to DPTR, refer to the data pointer that is
currently selected by the DPS bit (AUXR1.0). The six instructions
that use the DPTR are as follows:
The data pointer can be accessed on a byte-by-byte basis by
specifying the low or high byte in an instruction which accesses the
SFRs. See application note AN458 for more details.
on the falling edge of reset. Otherwise, this bit will be
IH
DPS
BIT0
AUXR1
INC DPTR Increments the data pointer by 1
MOV DPTR, #data16 Loads the DPTR with a 16-bit constant
MOV A, @ A+DPTR Move code byte relative to DPTR to ACC
MOVX A, @ DPTR Move external RAM (16-bit address) to
MOVX @ DPTR , A Move ACC to external RAM (16-bit
JMP @ A + DPTR Jump indirect relative to DPTR
is pulled low, ALE floats high, and
DPTR1
DPTR0
DPH
DPL
(83H)
(82H)
Figure 39.
ACC
address)
EXTERNAL
DATA
MEMORY
SU00745A
2002 Oct 28
52

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Programmable Counter Array (PCA)
The Programmable Counter Array available on the 89C66x is a
special 16-bit Timer that has five 16-bit capture/compare modules
associated with it. Each of the modules can be programmed to
operate in one of four modes: rising and/or falling edge capture,
software timer, high-speed output, or pulse width modulator. Each
module has a pin associated with it in port 1. Module 0 is connected
to P1.3(CEX0), module 1 to P1.4(CEX1), etc. The basic PCA
configuration is shown in Figure 40.
The PCA timer is a common time base for all five modules and can
be programmed to run at: 1/6 the oscillator frequency, 1/2 the
oscillator frequency , the Timer 0 overflow, or the input on the ECI pin
(P1.2). The timer count source is determined from the CPS1 and
CPS0 bits in the CMOD SFR as follows (see Figure 43):
CPS1 CPS0 PCA Timer Count Source
0 0 1/6 oscillator frequency (6 clock mode);
1/12 oscillator frequency (12 clock mode)
0 1 1/2 oscillator frequency (6 clock mode);
1/4 oscillator frequency (12 clock mode)
1 0 Timer 0 overflow
1 1 External Input at ECI pin
In the CMOD SFR, there are three additional bits associated with
the PCA. They are CIDL which allows the PCA to stop during idle
mode, WDTE which enables or disables the watchdog function on
module 4, and ECF which, when set, causes an interrupt and the
PCA overflow flag CF (in the CCON SFR) to be set when the PCA
timer overflows. These functions are shown in Figure 41.
The watchdog timer function is implemented in module 4 (see
Figure 50).
The CCON SFR contains the run control bit for the PCA, and the
flags for the PCA timer (CF) and each module (refer to Figure 44).
To run the PCA the CR bit (CCON.6) must be set by software. The
PCA is shut off by clearing this bit. The CF bit (CCON.7) is set when
P89C660/P89C662/P89C664/
P89C668
the PCA counter overflows and an interrupt will be generated if the
ECF bit in the CMOD register is set, The CF bit can only be cleared
by software. Bits 0 through 4 of the CCON register are the flags for
the modules (bit 0 for module 0, bit 1 for module 1, etc.) and are set
by hardware when either a match or a capture occurs. These flags
also can only be cleared by software. The PCA interrupt system is
shown in Figure 42.
Each module in the PCA has a special function register associated
with it. These registers are: CCAPM0 for module 0, CCAPM1 for
module 1, etc. (see Figure 45). The registers contain the bits that
control the mode that each module will operate in. The ECCF bit
(CCAPMn.0 where n = 0, 1, 2, 3, or 4 depending on the module)
enables the CCF flag in the CCON SFR to generate an interrupt
when a match or compare occurs in the associated module. PWM
(CCAPMn.1) enables the pulse width modulation mode. The TOG
bit (CCAPMn.2), when set, causes the CEX output associated with
the module to toggle when there is a match between the PCA
counter and the module’s capture/compare register. The match bit
MAT (CCAPMn.3), when set, will cause the CCFn bit in the CCON
register to be set when there is a match between the PCA counter
and the module’s capture/compare register.
The next two bits CAPN (CCAPMn.4) and CAPP (CCAPMn.5)
determine the edge that a capture input will be active on. The CAPN
bit enables the negative edge, and the CAPP bit enables the positive
edge. If both bits are set, both edges will be enabled and a capture
will occur for either transition. The last bit ECOM (CCAPMn.6), when
set, enables the comparator function. Figure 46 shows the CCAPMn
settings for the various PCA functions.
There are two additional registers associated with each of the PCA
modules. They are CCAPnH and CCAPnL and these are the
registers that store the 16-bit count when a capture occurs or a
compare should occur. When a module is used in the PWM mode
these registers are used to control the duty cycle of the output.
MODULE FUNCTIONS:
16-BIT CAPTURE
16-BIT TIMER
16-BIT HIGH SPEED OUTPUT
8-BIT PWM
WATCHDOG TIMER (MODULE 4 ONLY)
2002 Oct 28
16 BITS
PCA TIMER/COUNTER
TIME BASE FOR PCA MODULES
16 BITS
MODULE 0
MODULE 1
MODULE 2
MODULE 3
MODULE 4
Figure 40. Programmable Counter Array (PCA)
53
P1.3/CEX0
P1.4/CEX1
P1.5/CEX2
P3.4/CEX3
P3.5/CEX4
SU01416

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
OSC/6 (6 CLOCK MODE)
OSC/12 (12 CLOCK MODE)
OSC/2 (6 CLOCK MODE)
OSC/4 (12 CLOCK MODE)
TIMER 0 OVERFLOW
EXTERNAL INPUT
(P1.2/ECI)
IDLE
OR
OR
00
01
DECODE
10
11
CIDL WDTE –– –– –– CPS1 CPS0 ECF
CF CR CCF4 CCF3 CCF2 CCF1 CCF0––
P89C660/P89C662/P89C664/
P89C668
TO PCA
MODULES
OVERFLOW
CH CL
16–BIT UP COUNTER
CMOD
(C1H)
CCON
(C0H)
INTERRUPT
PCA TIMER/COUNTER
MODULE 0
MODULE 1
MODULE 2
MODULE 3
MODULE 4
CMOD.0 ECF
Figure 41. PCA Timer/Counter
CF CR CCF4 CCF3 CCF2 CCF1 CCF0––
CCAPMn.0 ECCFn
Figure 42. PCA Interrupt System
IE.6
EC
IE.7
EA
SU01256
CCON
(C0H)
TO
INTERRUPT
PRIORITY
DECODER
SU01097
2002 Oct 28
54

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
CMOD Address = C1H
P89C660/P89C662/P89C664/
P89C668
Reset Value = 00XX X000B
CIDL WDTE – – – CPS1 CPS0 ECF
Bit:
76543210
Symbol Function
CIDL Counter Idle control: CIDL = 0 programs the PCA Counter to continue functioning during idle Mode. CIDL = 1 programs
it to be gated off during idle.
WDTE Watchdog Timer Enable: WDTE = 0 disables Watchdog Timer function on PCA Module 4. WDTE = 1 enables it.
– Not implemented, reserved for future use.*
CPS1 PCA Count Pulse Select bit 1.
CPS0 PCA Count Pulse Select bit 0.
CPS1 CPS0 Selected PCA Input**
0 0 0 Internal clock, f
0 1 1 Internal clock, f
/6 in 6 clock mode (f
OSC
/2 in 6 clock mode (f
OSC
/12 in 12 clock mode)
OSC
/4 in 12 clock mode)
OSC
1 0 2 Timer 0 overflow
1 1 3 External clock at ECI/P1.2 pin
(max. rate = f
/4 in 6 clock mode, f
OSC
/8 in 12 clock mode)
OCS
ECF PCA Enable Counter Overflow interrupt: ECF = 1 enables CF bit in CCON to generate an interrupt. ECF = 0 disables
that function of CF.
NOTE:
* User software should not write 1s to reserved bits. These bits may be used in future 8051 family products to invoke new features. In that case, the reset or inactive value of the
new bit will be 0, and its active value will be 1. The value read from a reserved bit is indeterminate.
= oscillator frequency
** f
OSC
SU01257
Figure 43. CMOD: PCA Counter Mode Register
CCON Address = 0C0H
Reset Value = 00X0 0000B
Bit Addressable
CF CR – CCF4 CCF3 CCF2 CCF1 CCF0
Bit:
76543210
Symbol Function
CF PCA Counter Overflow flag. Set by hardware when the counter rolls over. CF flags an interrupt if bit ECF in CMOD is
set. CF may be set by either hardware or software but can only be cleared by software.
CR PCA Counter Run control bit. Set by software to turn the PCA counter on. Must be cleared by software to turn the PCA
counter off.
– Not implemented, reserved for future use*.
CCF4 PCA Module 4 interrupt flag. Set by hardware when a match or capture occurs. Must be cleared by software.
CCF3 PCA Module 3 interrupt flag. Set by hardware when a match or capture occurs. Must be cleared by software.
CCF2 PCA Module 2 interrupt flag. Set by hardware when a match or capture occurs. Must be cleared by software.
CCF1 PCA Module 1 interrupt flag. Set by hardware when a match or capture occurs. Must be cleared by software.
CCF0 PCA Module 0 interrupt flag. Set by hardware when a match or capture occurs. Must be cleared by software.
NOTE:
* User software should not write 1s to reserved bits. These bits may be used in future 8051 family products to invoke new features. In that case, the reset or inactive value of the
new bit will be 0, and its active value will be 1. The value read from a reserved bit is indeterminate.
SU01099
Figure 44. CCON: PCA Counter Control Register
2002 Oct 28
55

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
CCAPMn Address CCAPM0 0C2H
Not Bit Addressable
Bit:
Symbol Function
– Not implemented, reserved for future use*.
ECOMn Enable Comparator. ECOMn = 1 enables the comparator function.
CAPPn Capture Positive, CAPPn = 1 enables positive edge capture.
CAPNn Capture Negative, CAPNn = 1 enables negative edge capture.
MATn Match. When MATn = 1, a match of the PCA counter with this module’s compare/capture register causes the CCFn bit
TOGn Toggle. When TOGn = 1, a match of the PCA counter with this module’s compare/capture register causes the CEXn
PWMn Pulse Width Modulation Mode. PWMn = 1 enables the CEXn pin to be used as a pulse width modulated output.
ECCFn Enable CCF interrupt. Enables compare/capture flag CCFn in the CCON register to generate an interrupt.
NOTE:
*User software should not write 1s to reserved bits. These bits may be used in future 8051 family products to invoke new features. In that case, the reset or inactive value of the new
bit will be 0, and its active value will be 1. The value read from a reserved bit is indeterminate.
in CCON to be set, flagging an interrupt.
pin to toggle.
CCAPM1 0C3H
CCAPM2 0C4H
CCAPM3 0C5H
CCAPM4 0C6H
– ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn
76543210
Figure 45. CCAPMn: PCA Modules Compare/Capture Registers
P89C660/P89C662/P89C664/
P89C668
Reset Value = X000 0000B
SU01100
ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn MODULE FUNCTION
–
X 0 0 0 0 0 0 0 No operation
X X 1 0 0 0 0 X 16-bit capture by a positive-edge trigger on CEXn
X X 0 1 0 0 0 X 16-bit capture by a negative trigger on CEXn
X X 1 1 0 0 0 X 16-bit capture by a transition on CEXn
X 1 0 0 1 0 0 X 16-bit Software Timer
X 1 0 0 1 1 0 X 16-bit High Speed Output
X 1 0 0 0 0 1 0 8-bit PWM
X 1 0 0 1 X 0 X Watchdog Timer
Figure 46. PCA Module Modes (CCAPMn Register)
PCA Capture Mode
To use one of the PCA modules in the capture mode, either one or
both of the CCAPM bits CAPN and CAPP for that module must be
set. The external CEX input for the module (on port 1) is sampled for
a transition. When a valid transition occurs, the PCA hardware loads
the value of the PCA counter registers (CH and CL) into the
module’s capture registers (CCAPnL and CCAPnH). If the CCFn bit
for the module in the CCON SFR and the ECCFn bit in the CCAPMn
SFR are set, then an interrupt will be generated (refer to Figure 47).
16-bit Software Timer Mode
The PCA modules can be used as software timers by setting both
the ECOM and MAT bits in the modules CCAPMn register. The PCA
timer will be compared to the module’s capture registers, and when
a match occurs, an interrupt will occur if the CCFn (CCON SFR) and
the ECCFn (CCAPMn SFR) bits for the module are both set (see
Figure 48).
High Speed Output Mode
In this mode, the CEX output (on port 1) associated with the PCA
module will toggle each time a match occurs between the PCA
counter and the module’s capture registers. To activate this mode,
the TOG, MAT, and ECOM bits in the module’s CCAPMn SFR must
be set (see Figure 49).
Pulse Width Modulator Mode
All of the PCA modules can be used as PWM outputs. Figure 50
shows the PWM function. The frequency of the output depends on
the source for the PCA timer. All of the modules will have the same
frequency of output because they all share the PCA timer. The duty
cycle of each module is independently variable by using the
module’s capture register CCAPLn. When the value of the PCA CL
SFR is less than the value in the module’s CCAPLn SFR, the output
will be low. When it is equal to or greater than, the output will be
high. When CL overflows from FF to 00, CCAPLn is reloaded with
the value in CCAPHn. This allows PWM update without glitches.
The PWM and ECOM bits in the module’s CCAPMn register must
be set to enable the PWM mode.
2002 Oct 28
56

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
CF CR CCF4 CCF3 CCF2 CCF1 CCF0––
(TO CCFn)
CEXn
–– ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn
0 000
Figure 47. PCA Capture Mode
CAPTURE
P89C660/P89C662/P89C664/
P89C668
CCON
(0C0H)
PCA INTERRUPT
PCA TIMER/COUNTER
CH CL
CCAPnH CCAPnL
CCAPMn, n= 0 to 4
(C2H – C6H)
SU01101
WRITE TO
CCAPnL
WRITE TO
CCAPnH
01
RESET
ENABLE
CF CR CCF4 CCF3 CCF2 CCF1 CCF0––
CCAPnH
16–BIT COMPARATOR
CH CL
PCA TIMER/COUNTER
–– ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn
CCAPnL
(TO CCFn)
MATCH
0000
Figure 48. PCA Compare Mode
CCON
(C0H)
PCA INTERRUPT
CCAPMn, n= 0 to 4
(C2H – C6H)
SU01102
2002 Oct 28
57

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
CF CR CCF4 CCF3 CCF2 CCF1 CCF0––
WRITE TO
CCAPnL
WRITE TO
CCAPnH
01
RESET
ENABLE
CCAPnH CCAPnL
16–BIT COMPARATOR
CH CL
PCA TIMER/COUNTER
–– ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn
MATCH
P89C660/P89C662/P89C664/
P89C668
CCON
(C0H)
(TO CCFn)
1000
PCA INTERRUPT
TOGGLE
CCAPMn, n: 0..4
(C2H – C6H)
CEXn
Figure 49. PCA High Speed Output Mode
CCAPnH
CCAPnL
0
ENABLE
OVERFLOW
–– ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn
8–BIT
COMPARATOR
CL
PCA TIMER/COUNTER
0
CL < CCAPnL
CL >= CCAPnL
1
0000
Figure 50. PCA PWM Mode
CCAPMn, n: 0..4
(C2H – C6H)
SU01104
SU01103
CEXn
2002 Oct 28
58

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
CIDL WDTE –– –– –– CPS1 CPS0 ECF
WRITE TO
CCAP4H
WRITE TO
CCAP4L
10
RESET
ENABLE
CCAP4H CCAP4L
16–BIT COMPARATOR
CH CL
PCA TIMER/COUNTER
–– ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn
MODULE 4
MATCH
Figure 51. PCA Watchdog Timer m(Module 4 only)
P89C660/P89C662/P89C664/
P89C668
CMOD
(C1H)
RESET
CCAPM4
(C6H)
1
X000
X
SU01105
PCA Watchdog Timer
An on-board watchdog timer is available with the PCA to improve the
reliability of the system without increasing chip count. Watchdog
timers are useful for systems that are susceptible to noise, power
glitches, or electrostatic discharge. Module 4 is the only PCA module
that can be programmed as a watchdog. However, this module can
still be used for other modes if the watchdog is not needed.
Figure 51 shows a diagram of how the watchdog works. The user
pre-loads a 16-bit value in the compare registers. Just like the other
compare modes, this 16-bit value is compared to the PCA timer
value. If a match is allowed to occur, an internal reset will be
generated. This will not cause the RST pin to be driven high.
In order to hold off the reset, the user has three options:
1. periodically change the compare value so it will never match the
PCA timer,
2. periodically change the PCA timer value so it will never match
the compare values, or
3. disable the watchdog by clearing the WDTE bit before a match
occurs and then re-enable it.
The first two options are more reliable because the watchdog
timer is never disabled as in option #3. If the program counter ever
goes astray, a match will eventually occur and cause an internal
reset. The second option is also not recommended if other PCA
modules are being used. Remember, the PCA timer is the time
base for all modules; changing the time base for other modules
would not be a good idea. Thus, in most applications the first
solution is the best option.
Figure 52 shows the code for initializing the watchdog timer.
Module 4 can be configured in either compare mode, and the WDTE
bit in CMOD must also be set. The user’s software must periodically
change (CCAP4H,CCAP4L) to keep a match from occurring with the
PCA timer (CH,CL). This code is given in the WATCHDOG routine in
Figure 52.
This routine should not be part of an interrupt service routine,
because if the program counter goes astray and gets stuck in an
infinite loop, interrupts will still be serviced and the watchdog will
keep getting reset. Thus, the purpose of the watchdog would be
defeated. Instead, call this subroutine from the main program within
16
2
count of the PCA timer.
2002 Oct 28
59

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
INIT_WATCHDOG:
MOV CCAPM4, #4CH ; Module 4 in compare mode
MOV CCAP4L, #0FFH ; Write to low byte first
MOV CCAP4H, #0FFH ; Before PCA timer counts up to
; FFFF Hex, these compare values
; must be changed
ORL CMOD, #40H ; Set the WDTE bit to enable the
; watchdog timer without changing
; the other bits in CMOD
;
;********************************************************************
;
; Main program goes here, but CALL WATCHDOG periodically.
;
;********************************************************************
;
WATCHDOG:
CLR EA ; Hold off interrupts
MOV CCAP4L, #00 ; Next compare value is within
MOV CCAP4H, CH ; 255 counts of the current PCA
SETB EA ; timer value
RET
P89C668
Figure 52. PCA Watchdog Timer Initialization Code
2002 Oct 28
60

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
Expanded Data RAM Addressing
The P89C660/662/664/668 has internal data memory that is
mapped into four separate segments: the lower 128 bytes of RAM,
upper 128 bytes of RAM, 128 byte s S pecial Func tion Regist er (SFR),
and 256 bytes expanded RAM (ERAM) (256 bytes for the ’660; 768
bytes for the ’662; 1792 bytes for the ’664; 7936 bytes for the ’668).
The four segments are:
1. The Lower 128 bytes of RAM (addresses 00H to 7FH) are
directly and indirectly addressable.
2. The Upper 128 bytes of RAM (addresses 80H to FFH) are
indirectly addressable only.
3. The Special Function Registers, SFRs, (addresses 80H to FFH)
are directly addressable only.
4. The 256/768/1792/7936-bytes expanded RAM (ERAM,
00H – XFFH/2FFH/6FFH/1FFFH) are indirectly accessed by
move external instruction, MOVX, and with the EXTRAM bit
cleared, see Figure 53.
The Lower 128 bytes can be accessed by either direct or indirect
addressing. The Upper 128 bytes can be accessed by indirect
addressing only . The Upper 128 bytes occupy the same address
space as the SFR. That means they have the same address, but are
physically separate from SFR space.
When an instruction accesses an internal location above address
7FH, the CPU knows whether the access is to the upper 128 bytes
of data RAM, or to SFR space by the addressing mode used in the
instruction. Instructions that use direct addressing, access SFR
space. For example:
MOV 0A0H,A
accesses the SFR at location 0A0H (which is P2). Instructions that
use indirect addressing, access the Upper 128 bytes of data RAM.
P89C660/P89C662/P89C664/
P89C668
For example:
MOV @R0,A
where R0 contains 0A0H, accesses the data byte at address 0A0H,
rather than P2 (whose address is 0A0H).
The ERAM can be accessed by indirect addressing, with EXTRAM
bit cleared and MOVX instructions. This part of memory is physically
located on-chip, logically occupies the first 256 bytes (660), 768
(662), 1792 (664), 7936 (668) of external data memory.
With EXTRAM = 0, the ERAM is indirectly addressed, using the
MOVX instruction in combination with any of the registers R0, R1 of
the selected bank or DPTR. An access to ERAM will not affect ports
P0, P3.6 (WR#) and P3.7 (RD#). P2 SFR is in output state during
external addressing. For example, with EXTRAM = 0,
MOVX @R0,A
where R0 contains 0A0H, access the ERAM at address 0A0H rather
than external memory. An access to external data memory locations
higher than the ERAM will be performed with the MOVX DPTR
instructions in the same way as in the standard 80C51 (with P0 and
P2 as data/address bus, and P3.6 and P3.7 as write and read timing
signals. Refer to Figure 54).
With EXTRAM = 1, MOVX @Ri and MOVX @DPTR will be similar
to the standard 80C51. MOVX @ Ri will provide an 8-bit address
multiplexed with data on Port 0 and any output port pins can be
used to output higher order address bits. This is to provide the
external paging capability. MOVX @DPTR will generate a 16-bit
address. Port 2 outputs the high-order eight address bits (the
contents of DPH) while Port 0 multiplexes the low-order eight
address bits (the contents of DPL) with data. MOVX @Ri and MOVX
@DPTR will generate either read or write signals on P3.6 (WR
P3.7 (RD
The stack pointer (SP) may be located anywhere in the 256 bytes
RAM (lower and upper RAM) internal data memory. The stack may
not be located in the ERAM.
).
) and
AUXR
Symbol Function
AO Disable/Enable ALE
EXTRAM Internal/External RAM access using MOVX @Ri/@DPTR
— Not implemented, reserved for future use*.
NOTE:
*User software should not write 1s to reserved bits. These bits may be used in future 8051 family products to invoke new features. In that case, the reset or inactive value of the new
bit will be 0, and its active value will be 1. The value read from a reserved bit is indeterminate.
2002 Oct 28
Address = 8EH
Not Bit Addressable
— —————EXTRAM AO
Bit:
AO Operating Mode
0 ALE is emitted at a constant rate of 1/3 the oscillator frequency (6 clock mode; 1/6 f
1 ALE is active only during off-chip memory access.
EXTRAM Operating Mode
0 Internal ERAM access using MOVX @Ri/@DPTR
1 External data memory access.
76543210
Figure 53. AUXR: Auxiliary Register
61
Reset Value = xxxx xx10B
in 12 clock mode)
OSC
SU01711

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
FF/2FF/6FF/1FFF
000
ERAM
256, 768,
1792 OR 7936
BYTES
FF
UPPER
128 BYTES
INTERNAL RAM
80 80
LOWER
128 BYTES
INTERNAL RAM
00
Figure 54. Internal and External Data Memory Address Space with EXTRAM = 0
Hardware WatchDog Timer (One-Time Enabled
with Reset-Out for P89C660/662/664/668)
The WDT is intended as a recovery method in situations where the
CPU may be subjected to software upset. The WDT consists of a
14-bit counter and the WatchDog Timer reset (WDTRST) SFR. The
WDT is disabled at reset. To enable the WDT, user must write 01EH
and 0E1H in sequence to the WDTRST (SFR location 0A6H). When
WDT is enabled, it will increment every machine cycle while the
oscillator is running and there is no way to disable the WDT except
through reset (either hardware reset or WDT overflow reset). When
WDT overflows, it will drive an output reset HIGH pulse at the RST
pin.
FF
00
P89C660/P89C662/P89C664/
P89C668
FFFF
SPECIAL
FUNCTION
REGISTER
Using the WDT
To enable the WDT, user must write 01EH and 0E1H in sequence to
the WDTRST (SFR location 0A6H). When WDT is enabled, the user
needs to service it by writing 01EH and 0E1H to WDTRST to avoid
WDT overflow. The 14-bit counter overflows when it reaches 16383
(3FFFH) and this will reset the device. When WDT is enabled, it will
increment every machine cycle while the oscillator is running. This
means the user must reset the WDT at least every 16383 machine
cycles. To reset the WDT , the user must write 01EH and 0E1H to
WDTRST. WDTRST is a write only register. The WDT counter
cannot be read or written. When the WDT overflows, it will generate
an output RESET pulse at the RST pin. The RESET pulse duration
is 98 × T
T
OSC
serviced in those sections of code that will periodically be executed
within the time required to prevent a WDT reset.
(6 clock mode; 196 in 12 clock mode), where
OSC
= 1/f
. To make the best use of the WDT, it should be
OSC
0000
EXTERNAL
DATA
MEMORY
SU01712
2002 Oct 28
62

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
FLASH EPROM MEMORY
GENERAL DESCRIPTION
The P89C660/662/664/668 Flash memory augments EPROM
functionality with in-circuit electrical erasure and programming. The
Flash can be read and written as bytes. The Chip Erase operation
will erase the entire program memory. The Block Erase function can
erase any Flash byte block. In-System Programming and standard
parallel programming are both available. On-chip erase and write
timing generation contribute to a user-friendly programming
interface.
The P89C660/662/664/668 Flash reliably stores memory contents
even after 10,000 erase and program cycles. The cell is designed to
optimize the erase and programming mechanisms. In addition, the
combination of advanced tunnel oxide processing and low internal
electric fields for erase and programming operations, produces
reliable cycling. The P89C660/662/664/668 uses a +5 V V
to perform the Program/Erase algorithms.
FEATURES – IN-SYSTEM PROGRAMMING (ISP)
AND IN-APPLICATION PROGRAMMING (IAP)
•Flash EPROM internal program memory with Block Erase.
•Internal 1 kbyte fixed boot ROM, containing low-level in-system
programming routines and a default serial loader. User program
can call these routines to perform In-Application Programming
(IAP). The Boot ROM can be turned off to provide access to the
full 64 kbyte of Flash memory.
•Boot vector allows user provided Flash loader code to reside
anywhere in the Flash memory space. This configuration provides
flexibility to the user.
• Default loader in Boot ROM allows programming via the serial port
without the need for a user provided loader.
•Up to 64 kbytes of external program memory if the internal
program memory is disabled (EA
= 0).
•Programming and erase voltage +5 V (+12 V tolerant).
•Read/Programming/Erase using ISP/IAP:
– Byte Programming (20 ms).
– Typical quick erase times:
Block Erase (8 kbytes or 16 kbytes) in 10 seconds.
Full Erase (64 kbytes) in 20 seconds.
•In-System Programming.
•Programmable security for the code in the Flash.
•10,000 minimum erase/program cycles for each byte.
•10-year minimum data retention.
supply
PP
P89C660/P89C662/P89C664/
P89C668
CAPABILITIES OF THE PHILIPS 89C51
FLASH-BASED MICROCONTROLLERS
Flash organization
The P89C660/662/664/668 contains 16KB/32KB/64KB of Flash
program memory. This memory is organized as 5 separate blocks.
The first two blocks are 8 kbytes in size, filling the program memory
space from address 0 through 3FFF hex. The final three blocks are
16 kbytes in size and occupy addresses from 4000 through FFFF
hex.
Figure 55 depicts the Flash memory configurations.
Flash Programming and Erasure
There are three methods of erasing or programming of the Flash
memory that may be used. First, the Flash may be programmed or
erased in the end-user application by calling low-level routines
through a common entry point in the Boot ROM. The end-user
application, though, must be executing code from a different block
than the block that is being erased or programmed. Second, the
on-chip ISP boot loader may be invoked. This ISP boot loader will, in
turn, call low-level routines through the same common entry point in
the Boot ROM that can be used by the end-user application. Third,
the Flash may be programmed or erased using the parallel method
by using a commercially available EPROM programmer. The parallel
programming method used by these devices is similar to that used
by EPROM 87C51, but it is not identical, and the commercially
available programmer will need to have support for these devices.
Boot ROM
When the microcontroller programs its own Flash memory, all of the
low level details are handled by code that is permanently contained
in a 1 kbyte “Boot ROM” that is separate from the Flash memory.
A user program simply calls the common entry point with appropriate
parameters in the Boot ROM to accomplish the desired operation.
Boot ROM operations include things like: erase block, program byte,
verify byte, program security lock bit, etc. The Boot ROM overlays
the program memory space at the top of the address space from
FC00 to FFFF hex, when it is enabled. The Boot ROM may be
turned off so that the upper 1 kbytes of Flash program memory are
accessible for execution.
2002 Oct 28
63

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
FFFF
BLOCK 4
16 KBYTES
89C664/89C668
C000
BLOCK 3
16 KBYTES
BLOCK 2
16 KBYTES
BLOCK 1
8 KBYTES
BLOCK 0
8 KBYTES
89C662
89C660
PROGRAM
ADDRESS
8000
4000
2000
0000
Figure 55. Flash Memory Configurations
P89C660/P89C662/P89C664/
P89C668
BOOT ROM
(1 KBYTE)
FFFF
FC00
SU01264
Power-On Reset Code Execution
The P89C660/662/664/668 contains two special Flash registers: the
BOOT VECTOR and the ST ATUS BYTE. At the falling edge of reset,
the P89C660/662/664/668 examines the contents of the Status
Byte. If the Status Byte is set to zero, power-up execution starts at
location 0000H, which is the normal start address of the user’s
application code. When the Status Byte is set to a value other than
zero, the contents of the Boot Vector is used as the high byte of the
execution address and the low byte is set to 00H. The factory
default setting is 0FCH, corresponds to the address 0FC00H for the
factory masked-ROM ISP boot loader. A custom boot loader can be
written with the Boot Vector set to the custom boot loader.
NOTE: When erasing the Status Byte or Boot Vector,
both bytes are erased at the same time. It is necessary
to reprogram the Boot Vector after erasing and
updating the Status Byte.
Hardware Activation of the Boot Loader
The boot loader can also be executed by holding PSEN LOW, P2.7,
P2.6 high, EA
not connected) at the falling edge of RESET. This is the same effect
as having a non-zero status byte. This allows an application to be
built that will normally execute the end user’s code but can be
manually forced into ISP operation.
If the factory default setting for the Boot Vector (0FCH) is changed, it
will no longer point to the ISP masked-ROM boot loader code. If this
happens, the only possible way to change the contents of the Boot
Vector is through the parallel programming method, provided that
the end user application does not contain a customized loader that
provides for erasing and reprogramming of the Boot Vector and
Status Byte.
After programming the Flash, the status byte should be programmed
to zero in order to allow execution of the user’s application code
beginning at address 0000H.
greater than VIH (such as +5 V), and ALE HIGH (or
2002 Oct 28
64

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
V
CC
V
PP
RST
XTAL2
89C660
89C662
89C664
89C668
XTAL1
V
SS
Figure 56. In-System Programming with a Minimum of Pins
V
CC
TxD
RxD
P89C660/P89C662/P89C664/
P89C668
+ 5V (+12V Tolerant)
+5V
TxD
RxD
V
SS
“1”P2.6, P2.7
SU01265
In-System Programming (ISP)
The In-System Programming (ISP) is performed without removing
the microcontroller from the system. The In-System Programming
(ISP) facility consists of a series of internal hardware resources
coupled with internal firmware to facilitate remote programming of
the P89C660/662/664/668 through the serial port. This firmware is
provided by Philips and embedded within each
P89C660/662/664/668 device.
The Philips In-System Programming (ISP) facility has made in-circuit
programming in an embedded application possible with a minimum
of additional expense in components and circuit board area.
The ISP function uses five pins: TxD, RxD, V
, VCC, and VPP (see
SS
Figure 56). Only a small connector needs to be available to interface
your application to an external circuit in order to use this feature.
The V
supply should be adequately decoupled and VPP not
PP
allowed to exceed datasheet limits.
Free ISP software is available on the Philips web site: “WinISP”
1. Direct your browser to the following page:
http://www.semiconductors.philips.com/products/standard/
microcontrollers/download/80c51/flash/
2. Download “WinISP.exe”
3. Execute WinISP.exe to install the software
Free ISP software is also available from the Embedded Systems
Academy: “FlashMagic”
1. Direct your browser to the following page:
http://www.esacademy.com/software/flashmagic/
2. Download Flashmagic
3. Execute “flashmagic.exe” to install the software
Using the In-System Programming (ISP)
The ISP feature allows for a wide range of baud rates to be used in
your application, independent of the oscillator frequency. It is also
adaptable to a wide range of oscillator frequencies. This is
accomplished by measuring the bit-time of a single bit in a received
character. This information is then used to program the baud rate in
terms of timer counts based on the oscillator frequency. The ISP
feature requires that an initial character (an uppercase U) be sent to
the P89C660/662/664/668 to establish the baud rate. The ISP
firmware provides auto-echo of received characters.
Once baud rate initialization has been performed, the ISP firmware
will only accept Intel Hex-type records. Intel Hex records consist of
ASCII characters used to represent hexadecimal values and are
summarized below:
:NNAAAARRDD..DDCC<crlf>
In the Intel Hex record, the “NN” represents the number of data
bytes in the record. The P89C660/662/664/668 will accept up to 16
(10H) data bytes. The “AAAA” string represents the address of the
first byte in the record. If there are zero bytes in the record, this field
is often set to 0000. The “RR” string indicates the record type. A
record type of “00” is a data record. A record type of “01” indicates
the end-of-file mark. In this application, additional record types will
be added to indicate either commands or data for the ISP facility.
The maximum number of data bytes in a record is limited to 16
(decimal). ISP commands are summarized in Table 14.
As a record is received by the P89C660/662/664/668, the
information in the record is stored internally and a checksum
calculation is performed. The operation indicated by the record type
is not performed until the entire record has been received. Should
an error occur in the checksum, the P89C660/662/664/668 will send
an “X” out the serial port indicating a checksum error. If the
checksum calculation is found to match the checksum in the record,
then the command will be executed. In most cases, successful
reception of the record will be indicated by transmitting a “.”
character out the serial port (displaying the contents of the internal
program memory is an exceptions).
In the case of a Data Record (record type 00), an additional check is
made. A “.” character will NOT be sent unless the record checksum
matched the calculated checksum and all of the bytes in the record
were successfully programmed. For a data record, an “X” indicates
that the checksum failed to match, and an “R” indicates that one of
the bytes did not properly program. It is necessary to send a type 02
record (specify oscillator frequency) to the P89C660/662/664/668
before programming data.
2002 Oct 28
65

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
The ISP facility was designed so that specific crystal frequencies
were not required in order to generate baud rates or time the
programming pulses. The user thus needs to provide the
P89C660/662/664/668 with information required to generate the
proper timing. Record type 02 is provided for this purpose.
Table 14. Intel-Hex Records Used by In-System Programming
RECORD TYPE COMMAND/DATA FUNCTION
00 Program Data
01 End of File (EOF), no operation
02 Specify Oscillator Frequency
:nnaaaa00dd....ddcc
Where:
Nn = number of bytes (hex) in record
Aaaa = memory address of first byte in record
dd....dd = data bytes
cc = checksum
Example:
:10008000AF5F67F0602703E0322CFA92007780C3FD
:xxxxxx01cc
Where:
xxxxxx = required field, but value is a “don’t care”
cc = checksum
Example:
:00000001FF
:01xxxx02ddcc
Where:
xxxx = required field, but value is a “don’t care”
dd = integer oscillator frequency rounded down to nearest MHz
cc = checksum
Example:
:0100000210ED (dd = 10h = 16, used for 16.0–16.9 MHz)
P89C668
2002 Oct 28
66

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
RECORD TYPE COMMAND/DATA FUNCTION
03 Miscellaneous Write Functions
:nnxxxx03ffssddcc
Where:
nn = number of bytes (hex) in record
xxxx = required field, but value is a “don’t care”
03 = Write Function
ff = subfunction code
ss = selection code
dd = data input (as needed)
cc = checksum
Subfunction Code = 01 (Erase Blocks)
ff = 01
ss = block code as shown below:
block 0, 0k to 8k, 00H
block 1, 8k to 16k, 20H
block 2, 16k to 32k, 40H
block 3, 32k to 48k, 80H
block 4, 48k to 64k, C0H
Example:
:0200000301C03C erase block 4
Subfunction Code = 04 (Erase Boot Vector and Status Byte)
ff = 04
ss = don’t care
Example:
:020000030400F7 erase boot vector and status byte
Subfunction Code = 05 (Program Security Bits)
ff = 05
ss = 00 program security bit 1 (inhibit writing to Flash)
01 program security bit 2 (inhibit Flash verify)
02 program security bit 3 (disable external memory)
Example:
:020000030501F5 program security bit 2
Subfunction Code = 06 (Program Status Byte or Boot Vector)
ff = 06
ss = 00 program status byte
01 program boot vector
Example:
:030000030601FCF7 program boot vector with 0FCH
Subfunction Code = 07 (Full Chip Erase)
Erases all blocks, security bits, and sets status and boot vector to default values
ff = 07
ss = don’t care
dd = don’t care
Example:
:0100000307F5 full chip erase
04 Display Device Data or Blank Check – Record type 04 causes the contents of the entire Flash array to be sent out
the serial port in a formatted display. This display consists of an address and the contents of 16 bytes starting with that
address. No display of the device contents will occur if security bit 2 has been programmed. Data to the serial port is
initiated by the reception of any character and terminated by the reception of any character.
General Format of Function 04
:05xxxx04sssseeeeffcc
Where:
05 = number of bytes (hex) in record
xxxx = required field, but value is a “don’t care”
04 = “Display Device Data or Blank Check” function code
ssss = starting address
eeee = ending address
ff = subfunction
00 = display data
01 = blank check
cc = checksum
Example:
:0500000440004FFF0069 display 4000–4FFF
P89C660/P89C662/P89C664/
P89C668
2002 Oct 28
67

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
RECORD TYPE COMMAND/DATA FUNCTION
05 Miscellaneous Read Functions
General Format of Function 05
:02xxxx05ffsscc
Where:
02 = number of bytes (hex) in record
xxxx = required field, but value is a “don’t care”
05 = “Miscellaneous Read” function code
ffss = subfunction and selection code
cc = checksum
Example:
:020000050001F8 read signature byte – device id # 1
06 Direct Load of Baud Rate
General Format of Function 06
:02xxxx06hhllcc
Where:
02 = number of bytes (hex) in record
xxxx = required field, but value is a “don’t care”
06 = ”Direct Load of Baud Rate” function code
hh = high byte of Timer 2
ll = low byte of Timer 2
cc = checksum
Example:
:02000006F500F3
0000 = read signature byte – manufacturer id (15H)
0001 = read signature byte – device id # 1 (C2H)
0002 = read signature byte – device id # 2
0700 = read security bits
0701 = read status byte
0702 = read boot vector
P89C668
2002 Oct 28
68

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
In Application Programming Method
Several In Application Programming (IAP) calls are available for use
by an application program to permit selective erasing and
programming of Flash sectors. All calls are made through a common
interface, PGM_MTP. The programming functions are selected by
setting up the microcontroller’s registers before making a call to
PGM_MTP at FFF0H. The oscillator frequency is an integer number
rounded down to the nearest megahertz. For example, set R0 to 11
for 11.0592 MHz. Results are returned in the registers. The IAP calls
are shown in Table 15.
Table 15. IAP calls
IAP CALL PARAMETER
PROGRAM DATA BYTE Input Parameters:
R0 = osc freq (integer)
R1 = 02h
R1 = 82h (WDT feed, Rx2 & 66x only)
DPTR = address of byte to program
ACC = byte to program
Return Parameter
ACC = 00 if pass, !00 if fail
Sample routine:
;***** Program Device Data (DData) *****
;***** ACC holds data to write
;***** DPTR holds address of byte to write *****
;***** Returns with ACC = 00h if successful, else ACC NEQ 00h
WRData:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0, #11 ;FOSC
MOV R1,#02H ;program data function
MOV A,Mydata ;data to write
MOV DPTR,Address ;specify address of byte to read
CALL PGM_MTP ;execute the function
RET
ERASE BLOCK Input Parameters:
R0 = osc freq (integer)
R0 = 0 (QUICK ERASE, Rx2 & 66x only)
R1 = 01h
R1 = 81h (WDT feed, Rx2 & 66x only; can only be used with Quick Erase)
DPH = block code as shown below:
block 0, 0k to 8k, 00H
block 1, 8k to 16k, 20H
block 2, 16k to 32k, 40H
block 3, 32k to 48k, 80H
block 4, 48k to 64k, C0H
P89C660/P89C662/P89C664/
P89C668
Using the Watchdog Timer (WDT)
The 89C66x devices support the use of the WDT in IAP. The user
specifies that the WDT is to be fed by setting the most significant bit
of the function parameter passed in R1 prior to calling PGM_MTP.
The WDT function is only supported for Block Erase when using the
Quick Block Erase. The Quick Block Erase is specified by
performing a Block Erase with register R0 = 0. Requesting a WDT
feed during IAP should only be performed in applications that use
the WDT since the process of feeding the WDT will start the WDT if
the WDT was not working.
2002 Oct 28
DPL = 00h
Return Parameter
none
Sample routine:
;***** Erase Code Memory Block *****
;***** DPH (7:5) indicates which of the 5 blocks to erase
;***** DPTR values for the blocks are:
; 0000h = block 0
; 2000h = block 1
; 4000h = block 2
; 8000h = block 3
; C000h = block 4
ERSBLK:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0, #11 ;FOSC
MOV R1,#01H ;erase block
MOV DPTR,#BLk_NUM ;specify which block
CALL PGM_MTP ;execute the function
RET
69

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
IAP CALL PARAMETER
ERASE BOOT VECTOR &
STATUS BYTE
PROGRAM SECURITY BIT Input Parameters:
Input Parameters:
R0 = osc freq (integer)
R1 = 04h
R1 = 84h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = don’t care
Return Parameter
none
Sample routine:
;***** Erase Boot Vector (BV) & Status Byte (SB) *****
;***** Note: This command erases BOTH the SB & BV
ERSBBV;
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0, #11 ;FOSC
MOV R1,#04H ;erase status byte & boot vector
MOV DPH,#00h ;we don’t care about DPL
CALL PGM_MTP ;execute the function
RET
R0 = osc freq (integer)
R1 = 05h
R1 = 85h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = 00h – security bit # 1 (inhibit writing to Flash)
01h – security bit # 2 (inhibit Flash verify)
02h – security bit # 3 (disable external memory)
Return Parameter
none
Sample routines:
;***** Program Security Bit1 *****
;***** DPTR indicates security bit to program *****
P89C660/P89C662/P89C664/
P89C668
WRSB1:
;***** Program Security Bit2 *****
;***** DPTR indicates security bit to program *****
WRSB2:
;***** Program Security Bit3 *****
;***** DPTR indicates security bit to program *****
WRSB3:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#05H ;program security bit function
MOV DPTR,#0000h ;specify security bit 1
CALL PGM_MTP ;execute the function
RET
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#05H ;program security bit function
MOV DPTR,#0001h ;specify security bit 2
CALL PGM_MTP ;execute the function
RET
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#05H ;program security bit function
MOV DPTR,#0002h ;specify security bit 3
CALL PGM_MTP ;execute the function
RET
2002 Oct 28
70

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
IAP CALL PARAMETER
PROGRAM STATUS BYTE Input Parameters:
R0 = osc freq (integer)
R1 = 06h
R1 = 86h (WDT feed, Rx2, 66x only)
DPH = 00h
DPL = 00h – program status byte
ACC = status byte
Return Parameter
ACC = 00 if pass; not 00 if fails
Sample routine:
;***** Program Status Byte (SB) *****
;***** DPTR indicates program status byte *****
;***** ACC holds new value of Status Byte to program *****
WRSB:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#06H ;program status byte or boot vector
MOV DPTR,#0000h ;specify status byte
MOV A,NEW_SB ;
CALL PGM_MTP ;execute the function
RET
PROGRAM BOOT VECTOR Input Parameters:
R0 = osc freq (integer)
R1 = 06h
R1 = 86h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = 01h – program boot vector
ACC = boot vector
Return Parameter
ACC = 00 if pass; not 00 if fails
Sample routine:
;***** Program Boot Vector (BV) *****
;***** DPTR indicates program boot vector *****
;***** ACC holds new value of boot vector to program *****
P89C660/P89C662/P89C664/
P89C668
WRBV:
READ DEVICE DATA Input Parameters:
R1 = 03h
R1 = 83h (WDT feed, Rx2 & 66x only)
DPTR = address of byte to read
Return Parameter
ACC = value of byte read
Sample routine:
;*****reads the Device Data (DData) *****
;***** DData returned in ACC *****
;***** DPTR holds address of byte to read *****
RDData:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#06H ;program status byte or boot vector
MOV DPTR,#0001h ;specify boot vector
MOV A,NEW_SB ;new value for the boot vector
CALL PGM_MTP ;execute the function
RET
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#03H ;read data function
MOV DPTR,Address ;specify address of byte to read
CALL PGM_MTP ;execute the function
RET
2002 Oct 28
71

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
IAP CALL PARAMETER
READ MANUFACTURER ID Input Parameters:
R0 = osc freq (integer)
R1 = 00h
R1 = 80h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = 00h (manufacturer ID)
Return Parameter
ACC = value of byte read
Sample routine:
;*****reads the Manufacturer ID (MID) *****
;***** MID returned in ACC (should be 15h for Philips)
RDMID:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#00H ;read misc function
MOV DPTR,#0000H ;specify MID
CALL PGM_MTP ;execute the function
RET
READ DEVICE ID # 1 Input Parameters:
R0 = osc freq (integer)
R1 = 00h
R1 = 80h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = 01h (device ID # 1)
Return Parameter
ACC = value of byte read
Sample routine:
;*****reads the Device ID 1 (DID1) *****
;***** DID1 returned in ACC
RDDID1:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#00H ;read misc function
MOV DPTR,#0001H ;specify device id 1
CALL PGM_MTP ;execute the function
RET
READ DEVICE ID # 2 Input Parameters:
R0 = osc freq (integer)
R1 = 00h
R1 = 80h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = 02h (device ID # 2)
Return Parameter
ACC = value of byte read
Sample routine:
;*****reads the Device ID 2 (DID2) *****
;***** DID2 returned in ACC
RDDID2:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#00H ;read misc function
MOV DPTR,#0002H ;specify device id 2
CALL PGM_MTP ;execute the function
RET
P89C660/P89C662/P89C664/
P89C668
2002 Oct 28
72

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
IAP CALL PARAMETER
READ SECURITY BITS Input Parameters:
R0 = osc freq (integer)
R1 = 07h
R1 = 87h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = 00h (security bits)
Return Parameter
ACC = value of byte read
Sample routine:
;*****reads the Security Bits (SBits) *****
;***** SBits returned in ACC (2:0)
RDSBits:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#07H ;read misc function
MOV DPTR,#0000H ;specify security bits
CALL PGM_MTP ;execute the function
RET
READ STATUS BYTE Input Parameters:
R0 = osc freq (integer)
R1 = 07h
R1 = 87h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = 01h (status byte)
Return Parameter
ACC = value of byte read
Sample routine:
;*****reads the Status Byte (SB) *****
;***** SB returned in ACC
RDSB:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#07H ;read misc function
MOV DPTR,#0001H ;specify status byte
CALL PGM_MTP ;execute the function
RET
READ BOOT VECTOR Input Parameters:
R0 = osc freq (integer)
R1 = 07h
R1 = 87h (WDT feed, Rx2 & 66x only)
DPH = 00h
DPL = 02h (boot vector)
Return Parameter
ACC = value of byte read
Sample routine:
;*****reads the Boot Vector (BV) *****
;***** BV returned in ACC
RDBV:
MOV AUXR1,#20H ;set the ENBOOT bit
MOV R0,#11 ;FOSC
MOV R1,#07H ;read misc function
MOV DPTR,#0002H ;specify boot vector
CALL PGM_MTP ;execute the function
RET
P89C660/P89C662/P89C664/
P89C668
2002 Oct 28
73

Philips Semiconductors Product data
PROTECTION DESCRIPTION
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
Security
The security feature protects against software piracy and prevents the contents of the Flash from being read. The Security Lock bits are located
in Flash. The P89C660/662/664/668 has 3 programmable security lock bits that will provide different levels of protection for the on-chip code
and data (see Table 16).
Table 16.
SECURITY LOCK BITS
Level LB1 LB2 LB3
1 0 0 0 MOVC instructions executed from external program memory are disabled from fetching
2 1 0 0 Same as level 1, plus block erase is disabled. Erase or programming of the status byte or
3 1 1 0 Same as level 2, plus verify of code memory is disabled.
4 1 1 1 Same as level 3, plus external execution is disabled.
NOTE:
1. Security bits are independent of each other. Full-chip erase may be performed regardless of the state of the security bits.
2. Any other combination of lockbits is undefined.
3. Setting LBx doesn’t prevent programming of unprogrammed bits.
1
code bytes from internal memory.
boot vector is disabled.
2002 Oct 28
74

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
ABSOLUTE MAXIMUM RATINGS
Operating temperature under bias 0 to +70 or –40 to +85 °C
Storage temperature range –65 to +150 °C
Voltage on EA/VPP pin to V
Voltage on any other pin to V
Maximum IOL per I/O pin 15 mA
Power dissipation (based on package heat transfer limitations, not device power consumption) 1.5 W
NOTES:
1. Stresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only and
functional operation of the device at these or any conditions other than those described in the AC and DC Electrical Characteristics section
of this specification is not implied.
2. This product includes circuitry specifically designed for the protection of its internal devices from the damaging effects of excessive static
charge. Nonetheless, it is suggested that conventional precautions be taken to avoid applying greater than the rated maximum.
3. Parameters are valid over operating temperature range unless otherwise specified. All voltages are with respect to V
SS
SS
1, 2, 3
PARAMETER
P89C660/P89C662/P89C664/
P89C668
RATING UNIT
0 to +13.0 V
–0.5 to +6.5 V
unless otherwise noted.
SS
2002 Oct 28
75

Philips Semiconductors Product data
SYMBOL
PARAMETER
UNIT
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
DC ELECTRICAL CHARACTERISTICS
T
= 0 °C to +70 °C, 5 V ± 10% or –40 °C to +85 °C; 5V ±5%; VSS = 0 V
amb
TEST
V
V
V
V
V
V
V
V
V
V
I
I
I
I
I
IL
TL
LI
L2
CC
IL
IL2
IH
IH1
IH2
OL
OL1
OL2
OH
OH1
CONDITIONS
Input low voltage 4.5 V < VCC < 5.5 V –0.5 0.2 VCC–0.1 V
Input low voltage to P1.6/SCL, P1.7/SDA
11
Input high voltage (ports 0, 1, 2, 3, EA) 0.2VCC+0.9 VCC+0.5 V
Input high voltage, XTAL1, RST 0.7V
Input high voltage, P1.6/SCL, P1.7/SDA
Output low voltage, ports 1, 2, 3
Output low voltage, port 0, ALE, PSEN
11
8
7, 8
VCC = 4.5 V
IOL = 1.6 mA
VCC = 4.5 V
IOL = 3.2 mA
2
2
Output low voltage, P1.6/SCL, P1.7/SDA IOL = 3.0 mA – 0.4 V
Output high voltage, ports 1, 2, 3
Output high voltage (port 0 in external bus mode),
ALE9, PSEN
3
3
VCC = 4.5 V
I
= –30 µA
OH
VCC = 4.5 V
IOH = –3.2 mA
Logical 0 input current, ports 1, 2, 3 VIN = 0.4 V –1 –75 µA
Logical 1-to-0 transition current, ports 1, 2, 3
6
VIN = 2.0 V
See Note 4
Input leakage current, port 0 0.45 < VIN < VCC – 0.3 – ±10 µA
Input leakage current, P1.6/SCL, P1.7/SDA
0V < VI < 6 V
0V < VDD < 5.5 V
Power supply current (see Figure 64): See Note 5
MIN TYP
–0.5 0.3V
0.7V
VCC – 0.7 – V
VCC – 0.7 – V
– –650 µA
– 10 µA
Active mode (see Note 5)
Idle mode (see Note 5)
Power-Down mode or clock stopped (see Figure 71
for conditions)
Programming and erase mode f
R
RST
C
IO
Internal reset pull-down resistor 40 225 kΩ
Pin capacitance10 (except EA) – 15 pF
T
= 0 °C to 70 °C 20 100 µA
amb
T
= –40 °C to +85 °C 125 µA
amb
= 20 MHz 60 mA
osc
NOTES:
1. Typical ratings are not guaranteed. The values listed are at room temperature, 5 V.
2. Capacitive loading on ports 0 and 2 may cause spurious noise to be superimposed on the V
to external bus capacitance discharging into the port 0 and port 2 pins when these pins make 1-to-0 transitions during bus operations. In the
s of ALE and ports 1 and 3. The noise is due
OL
worst cases (capacitive loading > 100 pF), the noise pulse on the ALE pin may exceed 0.8 V. In such cases, it may be desirable to qualify
ALE with a Schmitt Trigger, or use an address latch with a Schmitt Trigger STROBE input. I
single output sinks more than 5mA and no more than two outputs exceed the test conditions.
can exceed these conditions provided that no
OL
3. Capacitive loading on ports 0 and 2 may cause the VOH on ALE and PSEN to momentarily fall below the VCC–0.7 specification when the
address bits are stabilizing.
4. Pins of ports 1, 2 and 3 source a transition current when they are being externally driven from 1 to 0. The transition current reaches its
maximum value when V
5. See Figures 68 through 71 for I
Active mode: I
Idle mode: I
6. This value applies to T
7. Load capacitance for port 0, ALE, and PSEN
8. Under steady state (non-transient) conditions, I
Maximum I
Maximum I
Maximum total I
If I
exceeds the test condition, VOL may exceed the related specification. Pins are not guaranteed to sink current greater than the listed
OL
test conditions.
per port pin: 15 mA (*NOTE: This is 85 °C specification.)
OL
per 8-bit port: 26 mA
OL
9. ALE is tested to V
10.Pin capacitance is characterized but not tested. Pin capacitance is less than 25 pF. Pin capacitance of ceramic package is l ess than 15 pF
(except EA
is 25 pF).
11. The input threshold voltage of P1.6 and P1.7 (SIO1) meets the I
is approximately 2 V.
IN
CC(MAX)
CC(MAX)
amb
for all outputs: 71 mA
OL
, except when ALE is off then VOH is the voltage specification.
OH1
test conditions and Figure 64 for I
CC
= (2.8 × FREQ. + 8.0)mA for all devices, in 6 clock mode; (1.4 × FREQ. + 8.0)mA in 12 clock mode.
= (1.2 × FREQ. +1.0)mA in 6 clock mode; (0.6 × FREQ. +1.0)mA in 12 clock mode.
= 0 °C to +70 °C.
= 100 pF, load capacitance for all other outputs = 80 pF.
must be externally limited as follows:
OL
vs Freq.
CC
2
C specification, so an input voltage below 1.5 V will be recognized as a logic 0
while an input voltage above 3.0 V will be recognized as a logic 1.
LIMITS
1
MAX
DD
CC
DD
VCC+0.5 V
6.0 V
– 0.4 V
– 0.45 V
V
2002 Oct 28
76

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
AC ELECTRICAL CHARACTERISTICS (6 CLOCK MODE)
T
= 0 °C to +70 °C, VCC = 5 V ± 10% or –40 °C to +85 °C, VCC = 5 V ±5%, VSS = 0 V
amb
P89C660/P89C662/P89C664/
P89C668
1, 2, 3
VARIABLE CLOCK
4
20 MHz CLOCK
4
SYMBOL FIGURE PARAMETER MIN MAX MIN MAX UNIT
1/t
t
LHLL
t
AVLL
t
LLAX
t
LLIV
t
LLPL
t
PLPH
t
PLIV
t
PXIX
t
PXIZ
t
AVIV
t
PLAZ
CLCL
57 Oscillator frequency 0 20 – – MHz
57 ALE pulse width t
57 Address valid to ALE low 0.5t
57 Address hold after ALE low 0.5t
57 ALE low to valid instruction in – 2t
57 ALE low to PSEN low 0.5t
57 PSEN pulse width 1.5t
57 PSEN low to valid instruction in – 1.5t
–40 – 10 – ns
CLCL
–20 – 5 – ns
CLCL
–20 – 5 – ns
CLCL
–65 – 35 ns
CLCL
–20 – 5 – ns
CLCL
–45 – 30 – ns
CLCL
–60 – 15 ns
CLCL
57 Input instruction hold after PSEN 0 – 0 – ns
57 Input instruction float after PSEN – 0.5t
57 Address to valid instruction in – 2.5t
–20 – 5 ns
CLCL
–80 – 45 ns
CLCL
57 PSEN low to address float – 10 – 10 ns
Data Memory
t
RLRH
t
WLWH
t
RLDV
t
RHDX
t
RHDZ
t
LLDV
t
AVDV
t
LLWL
t
AVWL
t
QVWX
t
WHQX
t
QVWH
t
RLAZ
t
WHLH
58, 59 RD pulse width 3t
58, 59 WR pulse width 3t
58, 59 RD low to valid data in – 2.5t
–100 – 50 – ns
CLCL
–100 – 50 – ns
CLCL
–90 – 35 ns
CLCL
58, 59 Data hold after RD 0 – 0 – ns
58, 59 Data float after RD – t
58, 59 ALE low to valid data in – 4t
58, 59 Address to valid data in – 4.5t
58, 59 ALE low to RD or WR low 1.5t
58, 59 Address valid to WR low or RD low 2t
58, 59 Data valid to WR transition 0.5t
58, 59 Data hold after WR 0.5t
59 Data valid to WR high 3.5t
–50 1.5t
CLCL
–75 – 25 – ns
CLCL
–25 – 0 – ns
CLCL
–20 – 5 – ns
CLCL
–130 – 45 – ns
CLCL
–20 – 5 ns
CLCL
–150 – 50 ns
CLCL
–165 – 60 ns
CLCL
+50 25 125 ns
CLCL
58, 59 RD low to address float – 0 – 0 ns
58, 59 RD or WR high to ALE high 0.5t
CLCL
–20 0.5t
+20 5 45 ns
CLCL
External Clock
t
CHCX
t
CLCX
t
CLCH
t
CHCL
61 High time 20 t
61 Low time 20 t
CLCL–tCLCX
CLCL–tCHCX
– – ns
– – ns
61 Rise time – 5 – – ns
61 Fall time – 5 – – ns
Shift Register
t
XLXL
t
QVXH
t
XHQX
t
XHDX
t
XHDV
60 Serial port clock cycle time 6t
60 Output data setup to clock rising edge 5t
60 Output data hold after clock rising edge t
CLCL
CLCL
CLCL
–133 – 117 – ns
–30 – 20 – ns
– 300 – ns
60 Input data hold after clock rising edge 0 – 0 – ns
60 Clock rising edge to input data valid – 5t
–133 – 117 ns
CLCL
NOTES:
1. Parameters are valid over operating temperature range unless otherwise specified.
2. Load capacitance for port 0, ALE, and PSEN
= 100 pF, load capacitance for all other outputs = 80 pF.
3. Interfacing the microcontroller to devices with float times up to 45ns is permitted. This limited bus contention will not cause damage to Port 0 drivers.
4. Parts are tested to 2 MHz, but are guaranteed to operate down to 0 Hz.
2002 Oct 28
77

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
AC ELECTRICAL CHARACTERISTICS (6 CLOCK MODE) (Continued)
T
= 0 °C to +70 °C, VCC = 5 V ± 10% or –40 °C to +85 °C,VCC = 5 V ± 5%, VSS = 0 V
amb
SYMBOL PARAMETER INPUT OUTPUT
I2C Interface
t
HD;STA
t
LOW
t
HIGH
t
RC
t
FC
t
SU;DAT1
t
SU;DAT2
t
SU;DAT3
t
HD;DAT
t
SU;STA
t
SU;STO
t
BUF
t
RD
t
FD
STAR T condition hold time ≥ 7 t
SCL low time ≥ 8 t
SCL high time ≥ 7 t
SCL rise time ≤ 1 µs –
SCL fall time ≤ 0.3 µs < 0.3 µs
Data set-up time ≥ 250 ns > 10 t
SDA set-up time (before rep. STAR T cond.) ≥ 250 ns > 1 µs
SDA set-up time (before STOP cond.) ≥ 250 ns > 4 t
Data hold time ≥ 0 ns > 4 t
Repeated START set-up time ≥ 7 t
STOP condition set-up time ≥ 7 t
Bus free time ≥ 7 t
SDA rise time ≤ 1 µs
SDA fall time ≤ 300 ns
NOTES:
1. Parameters are valid over operating temperature range and voltage range unless otherwise specified.
2. Load capacitance for port 0, ALE, and PSEN
= 100 pF, load capacitance for all other outputs = 80 pF.
3. These values are characterized but not 100% production tested.
4. At 100 kbit/s. At other bit rates this value is inversely proportional to the bit-rate of 100 kbit/s.
5. Determined by the external bus-line capacitance and the external bus-line pull-resistor, this must be < 1 µs.
6. Spikes on the SDA and SCL lines with a duration of less than 3 t
SCL = 400 pF.
7. t
CLCL
= 1/f
= one oscillator clock period at pin XTAL1.
OSC
will be filtered out. Maximum capacitance on bus-lines SDA and
CLCL
1, 2
CLCL
CLCL
CLCL
CLCL
CLCL
CLCL
> 4.0 µs
> 4.7 µs
> 4.0 µs
CLCL
4
4
4
7
7
CLCL
> 4.7 µs
> 4.0 µs
> 4.7 µs
–
< 0.3 µs
5
– t
CLCL
– t
5
4
46
4
6
RD
4
FC
4
4
4
6
2002 Oct 28
78

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
AC ELECTRICAL CHARACTERISTICS (12 CLOCK MODE)
T
= 0 °C to +70 °C, VCC = 5 V ± 10%, or –40 °C to +85 °C, VCC = 5 V ±5%, VSS = 0V
amb
P89C660/P89C662/P89C664/
P89C668
1, 2, 3
VARIABLE CLOCK
4
33 MHz CLOCK
4
SYMBOL FIGURE PARAMETER MIN MAX MIN MAX UNIT
1/t
t
LHLL
t
AVLL
t
LLAX
t
LLIV
t
LLPL
t
PLPH
t
PLIV
t
PXIX
t
PXIZ
t
AVIV
t
PLAZ
CLCL
57 Oscillator frequency 0 33 – – MHz
57 ALE pulse width 2t
57 Address valid to ALE low t
57 Address hold after ALE low t
57 ALE low to valid instruction in – 4t
57 ALE low to PSEN low t
57 PSEN pulse width 3t
57 PSEN low to valid instruction in – 3t
–40 – 21 – ns
CLCL
–25 – 5 – ns
CLCL
–25 – 5 – ns
CLCL
–65 – 55 ns
CLCL
–25 – 5 – ns
CLCL
–45 – 45 – ns
CLCL
–60 – 30 ns
CLCL
57 Input instruction hold after PSEN 0 – 0 – ns
57 Input instruction float after PSEN – t
57 Address to valid instruction in – 5t
–25 – 5 ns
CLCL
–80 – 70 ns
CLCL
57 PSEN low to address float – 10 – 10 ns
Data Memory
t
RLRH
t
WLWH
t
RLDV
t
RHDX
t
RHDZ
t
LLDV
t
AVDV
t
LLWL
t
AVWL
t
QVWX
t
WHQX
t
QVWH
t
RLAZ
t
WHLH
58, 59 RD pulse width 6t
58, 59 WR pulse width 6t
58, 59 RD low to valid data in – 5t
–100 – 82 – ns
CLCL
–100 – 82 – ns
CLCL
–90 – 60 ns
CLCL
58, 59 Data hold after RD 0 – 0 – ns
58, 59 Data float after RD – 2t
58, 59 ALE low to valid data in – 8t
58, 59 Address to valid data in – 9t
58, 59 ALE low to RD or WR low 3t
58, 59 Address valid to WR low or RD low 4t
58, 59 Data valid to WR transition t
58, 59 Data hold after WR t
59 Data valid to WR high 7t
–50 3t
CLCL
–75 – 45 – ns
CLCL
–30 – 0 – ns
CLCL
–25 – 5 – ns
CLCL
–130 – 80 – ns
CLCL
–28 – 32 ns
CLCL
–150 – 90 ns
CLCL
–165 – 105 ns
CLCL
+50 40 140 ns
CLCL
58, 59 RD low to address float – 0 – 0 ns
58, 59 RD or WR high to ALE high t
CLCL
–25 t
+25 5 55 ns
CLCL
External Clock
t
CHCX
t
CLCX
t
CLCH
t
CHCL
61 High time 17 t
61 Low time 17 t
CLCL–tCLCX
CLCL–tCHCX
– – ns
– – ns
61 Rise time – 5 – – ns
61 Fall time – 5 – – ns
Shift Register
t
XLXL
t
QVXH
t
XHQX
t
XHDX
t
XHDV
60 Serial port clock cycle time 12t
60 Output data setup to clock rising edge 10t
60 Output data hold after clock rising edge 2t
CLCL
CLCL
CLCL
–133 – 167 – ns
–80 – 50 – ns
– 360 – ns
60 Input data hold after clock rising edge 0 – 0 – ns
60 Clock rising edge to input data valid – 10t
–133 – 167 ns
CLCL
NOTES:
1. Parameters are valid over operating temperature range unless otherwise specified.
2. Load capacitance for port 0, ALE, and PSEN
= 100 pF, load capacitance for all other outputs = 80 pF.
3. Interfacing the microcontroller to devices with float times up to 45 ns is permitted. This limited bus contention will not cause damage to Port 0
drivers.
4. Parts are tested to 3.5 MHz, but guaranteed to operate down to 0 Hz.
2002 Oct 28
79

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
AC ELECTRICAL CHARACTERISTICS (12 CLOCK MODE) (Continued)
T
= 0°C to +70°C, VCC = 5 V ± 10%, or –40°C to +85°C, VCC = 5 V ± 5%, VSS = 0 V
amb
SYMBOL PARAMETER INPUT OUTPUT
I2C Interface
t
HD;STA
t
LOW
t
HIGH
t
RC
t
FC
t
SU;DAT1
t
SU;DAT2
t
SU;DAT3
t
HD;DAT
t
SU;STA
t
SU;STO
t
BUF
t
RD
t
FD
STAR T condition hold time ≥ 14 t
SCL low time ≥ 16 t
SCL high time ≥ 14 t
SCL rise time ≤ 1 µs –
SCL fall time ≤ 0.3 µs < 0.3 µs
Data set-up time ≥ 250 ns > 20 t
SDA set-up time (before rep. STAR T cond.) ≥ 250 ns > 1 µs
SDA set-up time (before STOP cond.) ≥ 250 ns > 8 t
Data hold time ≥ 0 ns > 8 t
Repeated START set-up time ≥ 14 t
STOP condition set-up time ≥ 14 t
Bus free time ≥ 14 t
SDA rise time ≤ 1 µs
SDA fall time ≤ 300 ns
NOTES:
1. Parameters are valid over operating temperature range and voltage range unless otherwise specified.
2. Load capacitance for port 0, ALE, and PSEN
= 100 pF, load capacitance for all other outputs = 80 pF.
3. These values are characterized but not 100% production tested.
4. At 100 kbit/s. At other bit rates this value is inversely proportional to the bit-rate of 100 kbit/s.
5. Determined by the external bus-line capacitance and the external bus-line pull-resistor, this must be < 1 µs.
6. Spikes on the SDA and SCL lines with a duration of less than 3 t
SCL = 400 pF.
= 1/f
7. t
CLCL
2
I
C-bus specification for bit-rates up to 100 kbit/s.
= one oscillator clock period at pin XTAL1. For 63 ns < t
OSC
will be filtered out. Maximum capacitance on bus-lines SDA and
CLCL
CLCL
1, 2
CLCL
CLCL
CLCL
4
CLCL
4
CLCL
4
CLCL
7
7
< 285 ns (16 MHz > f
> 4.0 µs
> 4.7 µs
> 4.0 µs
CLCL
CLCL
> 4.7 µs
> 4.0 µs
> 4.7 µs
–
< 0.3 µs
> 3.5 MHz) the I2C interface meets the
OSC
5
– t
CLCL
– t
5
4
4
4
6
RD
4
FC
4
4
4
6
2002 Oct 28
80

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
EXPLANATION OF THE AC SYMBOLS
Each timing symbol has five characters. The first character is always
‘t’ (= time). The other characters, depending on their positions,
indicate the name of a signal or the logical status of that signal. The
designations are:
A – Address
C – Clock
D – Input data
H – Logic level high
I – Instruction (program memory contents)
L – Logic level low, or ALE
t
ALE
PSEN
PORT 0
LHLL
t
t
AVLL
LLPL
t
LLAX
A0–A7 A0–A7
t
LLIV
t
PLIV
t
PLPH
t
PLAZ
t
PXIX
INSTR IN
P89C660/P89C662/P89C664/
P – PSEN
Q – Output data
signal
R–RD
t – Time
V – Valid
W– WR
signal
X – No longer a valid logic level
Z – Float
Examples: t
t
PXIZ
= Time for address valid to ALE low.
AVLL
= Time for ALE low to PSEN low.
t
LLPL
P89C668
ALE
PSEN
PORT 0
PORT 2
RD
PORT 2
t
AVLL
t
LLAX
A0–A7
FROM RI OR DPL
t
AVWL
t
AVIV
A0–A15 A8–A15
Figure 57. External Program Memory Read Cycle
t
WHLH
t
LLDV
t
LLWL
t
RLAZ
t
AVDV
P2.0–P2.7 OR A8–A15 FROM DPF A0–A15 FROM PCH
t
RLDV
t
RLRH
t
RHDZ
t
RHDX
DATA IN A0–A7 FROM PCL INSTR IN
SU00006
2002 Oct 28
SU00025
Figure 58. External Data Memory Read Cycle
81

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
ALE
PSEN
t
WLWH
t
QVWH
DATA OUT A0–A7 FROM PCL INSTR IN
WR
PORT 0
PORT 2
t
AVLL
t
t
LLAX
A0–A7
FROM RI OR DPL
t
AVWL
LLWL
t
QVWX
P2.0–P2.7 OR A8–A15 FROM DPF A0–A15 FROM PCH
P89C660/P89C662/P89C664/
P89C668
t
WHLH
t
WHQX
INSTRUCTION
ALE
CLOCK
OUTPUT DATA
WRITE TO SBUF
INPUT DATA
CLEAR RI
SU00026
Figure 59. External Data Memory Write Cycle
012345678
t
XLXL
t
t
QVXH
t
XHDV
VALID VALID VALID VALID VALID VALID VALID VALID
XHQX
1230 4567
t
XHDX
SET TI
SET RI
SU00027
Figure 60. Shift Register Mode Timing
VCC–0.5
0.45V
0.7V
CC
0.2VCC–0.1
t
CHCL
t
CLCX
t
CLCL
t
CHCX
t
CLCH
SU00009
Figure 61. External Clock Drive
2002 Oct 28
82

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
VCC–0.5
0.45V
NOTE:
AC inputs during testing are driven at VCC –0.5 for a logic ‘1’ and 0.45V for a logic ‘0’.
Timing measurements are made at VIH min for a logic ‘1’ and VIL max for a logic ‘0’.
Figure 62. AC Testing Input/Output
0.2V
+0.9
CC
–0.1
0.2V
CC
SU00717
70
60
P89C660/P89C662/P89C664/
P89C668
V
+0.1V
V
NOTE:
For timing purposes, a port is no longer floating when a 100mV change from
load voltage occurs, and begins to float when a 100mV change from the loaded
V
OH/VOL
LOAD
LOAD
V
–0.1V
LOAD
level occurs. IOH/IOL ≥ ±20mA.
TIMING
REFERENCE
POINTS
Figure 63. Float Waveform
V
OH
V
OL
SU00718
–0.1V
+0.1V
50
89C660/662/664/668
MAXIMUM ACTIVE I
40
(mA)
I
CC
30
20
10
2 4 6 8 10 12 14 16 18
MAXIMUM IDLE
CC
TYPICAL ACTIVE I
TYPICAL IDLE
CC
20
Frequency at XTAL1 (MHz, 6 clock mode)
SU01402
Figure 64. ICC vs. FREQ
Valid only within frequency specifications of the device under test
2002 Oct 28
83

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
START or repeated START condition
t
RD
SDA
(INPUT/OUTPUT)
SCL
(INPUT/OUTPUT)
t
FDtRC
t
HD;STA
t
LOW
t
HIGH
VCC–0.5
0.45V
NOTE:
AC inputs during testing are driven at VCC –0.5 for a logic ‘1’ and 0.45V for a logic ‘0’.
Timing measurements are made at V
t
FC
t
SU;DAT1
t
HD;DAT
Figure 65. Timing SI01 (I2C) Interface
+0.9
0.2V
CC
0.2V
–0.1
CC
min for a logic ‘1’ and VIL max for a logic ‘0’.
IH
P89C660/P89C662/P89C664/
P89C668
repeated START condition
STOP condition
t
SU;DAT2
t
SU;STA
t
SU;STO
0.7 V
0.3 V
t
t
CC
CC
SU;DAT3
BUF
START condition
0.7 V
CC
0.3 V
CC
SU00107A
SU00010
Figure 66. AC Testing Input/Output
V
+0.1V
LOAD
LOAD
V
LOAD
–0.1V
V
NOTE:
For timing purposes, a port is no longer floating when a 100mV change from load voltage occurs,
and begins to float when a 100mV change from the loaded V
TIMING
REFERENCE
POINTS
OH/VOL
V
–0.1V
OH
+0.1V
V
OL
level occurs. IOH/IOL ≥ ±20mA.
SU00011
Figure 67. Float Waveform
2002 Oct 28
84

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
V
CC
I
CC
V
P1.6
P1.7
CC
EA
V
CC
P0
*
*
SU01261
V
CC
RST
89C660
89C662
89C664
(NC)
CLOCK SIGNAL
XTAL2
XTAL1
V
SS
89C668
Figure 68. ICC Test Condition, Active Mode.
All other pins are disconnected
P89C660/P89C662/P89C664/
V
RST
EA
89C660
89C662
(NC)
CLOCK SIGNAL
XTAL2
XTAL1
V
SS
89C664
89C668
Figure 69. ICC Test Condition, Idle Mode.
All other pins are disconnected
CC
P0
P1.6
P1.7
P89C668
V
CC
I
CC
V
CC
*
*
SU01262
VCC–0.5
0.5V
t
CHCL
t
CLCX
t
CLCL
t
CHCX
t
CLCH
SU00266
Figure 70. Clock Signal Waveform for ICC Tests in Active and Idle Modes.
t
RST
EA
CLCL
= t
CHCL
89C660
= 10 ns
V
CC
P0
V
CC
I
CC
V
CC
89C662
(NC)
XTAL2
XTAL1
V
SS
89C664
89C668
P1.6
P1.7
*
*
SU01263
Figure 71. ICC Test Condition, Power-Down mode.
All other pins are disconnected; V
= 2V to 5.5V
CC
NOTE:
* Ports 1.6 and 1.7 should be connected to V
exceed the I
specification.
OL1
2002 Oct 28
through resistors of sufficiently high value such that the sink current into these pins does not
CC
85

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
PLCC44: plastic leaded chip carrier; 44 leads SOT187-2
P89C660/P89C662/P89C664/
P89C668
2002 Oct 28
86

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
LQFP44: plastic low profile quad flat package; 44 leads; body 10 x 10 x 1.4 mm SOT389-1
P89C660/P89C662/P89C664/
P89C668
2002 Oct 28
87

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
P89C660/P89C662/P89C664/
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
REVISION HISTORY
Rev Date Description
_4 20021028 Product data (9397 750 10403); replaces P89C660/P89C662/P89C664 of 2001 Jul 19
(9397 750 08584) and P89C668 of 2001 Jul 27 (9397 750 08651)
Engineering Change Notice 853–2392 29118 (date: 20021028)
Modifications:
•Integrated 89C668 in 89C66x datasheet
•Added more description on I
2
C, Timer 0 and Timer 1, and Enhanced UAR T
•P2.6 must be high to activate the boot loader by hardware (ISP section).
P89C668
2002 Oct 28
88

Philips Semiconductors Product data
80C51 8-bit Flash microcontroller family
16KB/32KB/64KB ISP/IAP Flash with 512B/1KB/2KB/8KB RAM
P89C660/P89C662/P89C664/
P89C668
Data sheet status
Product
Level
I
II
III
[1] Please consult the most recently issued data sheet before initiating or completing a design.
[2] The product status of the device(s) described in this data sheet may have changed since this data sheet was published. The latest information is available on the Internet at URL
[3] For data sheets describing multiple type numbers, the highest-level product status determines the data sheet status.
Data sheet status
Objective data
Preliminary data
Product data
http://www.semiconductors.philips.com.
[1]
[2] [3]
status
Development
Qualification
Production
Definitions
This data sheet contains data from the objective specification for product development.
Philips Semiconductors reserves the right to change the specification in any manner without notice.
This data sheet contains data from the preliminary specification. Supplementary data will be published
at a later date. Philips Semiconductors reserves the right to change the specification without notice, in
order to improve the design and supply the best possible product.
This data sheet contains data from the product specification. Philips Semiconductors reserves the
right to make changes at any time in order to improve the design, manufacturing and supply. Relevant
changes will be communicated via a Customer Product/Process Change Notification (CPCN).
Definitions
Short-form specification — The data in a short-form specification is extracted from a full data sheet with the same type number and title. For detailed information see
the relevant data sheet or data handbook.
Limiting values definition — Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 60134). Stress above one or more of the limiting
values may cause permanent damage to the device. These are stress ratings only and operation of the device at these or at any other conditions above those given
in the Characteristics sections of the specification is not implied. Exposure to limiting values for extended periods may affect device reliability.
Application information — Applications that are described herein for any of these products are for illustrative purposes only. Philips Semiconductors make no
representation or warranty that such applications will be suitable for the specified use without further testing or modification.
Disclaimers
Life support — These products are not designed for use in life support appliances, devices, or systems where malfunction of these products can reasonably be
expected to result in personal injury . Philips Semiconductors customers using or selling these products for use in such applications do so at their own risk and agree
to fully indemnify Philips Semiconductors for any damages resulting from such application.
Right to make changes — Philips Semiconductors reserves the right to make changes in the products—including circuits, standard cells, and/or software—described
or contained herein in order to improve design and/or performance. When the product is in full production (status ‘Production’), relevant changes will be communicated
via a Customer Product/Process Change Notification (CPCN). Philips Semiconductors assumes no responsibility or liability for the use of any of these products, conveys
no license or title under any patent, copyright, or mask work right to these products, and makes no representations or warranties that these products are free from patent,
copyright, or mask work right infringement, unless otherwise specified.
Contact information
For additional information please visit
http://www.semiconductors.philips.com . Fax: +31 40 27 24825
For sales offices addresses send e-mail to:
sales.addresses@www.semiconductors.philips.com.
Document order number: 9397 750 10403
Koninklijke Philips Electronics N.V. 2002
All rights reserved. Printed in U.S.A.
Date of release: 10-02
2002 Oct 28
89
 Loading...
Loading...