

Philips OQ8844 Datasheet

INTEGRATED CIRCUITS
DATA SH EET
OQ8844
Digital Servo Driver (DSD-2)
Product specification
File under Integrated Circuits, IC01
1995 Nov 27
Philips Semiconductors Product specification
Digital Servo Driver (DSD-2) OQ8844
FEATURES
Servo functions
• 1-bit class-D focus actuator driver (3.3 Ω)
• 1-bit class-D radial actuator driver (3.7 Ω)
• 1-bit class-D sledge motor driver (2.5 Ω).
GENERAL DESCRIPTION
The OQ8844 or Digital Servo Driver 2 (DSD2) consists of
1-bit class-D power drivers, which are specially designed
for digital servo applications. Three such amplifiers are
integrated in one chip, to drive the focus and radial
actuators and the sledge motor of a compact disc optical
system.
Other features
• Supply voltage 5 V only
• Small package (SOT163-1)
• Higher efficiency, compared with conventional drivers,
due to the class-D principle
• Built-in digital notch filters for higher efficiency
The main benefits of using this principle are its higher
efficiency grade compared to conventional analog power
amplifiers, its higher integration level, its differential output
and the fact that only a few external components are
needed. When using these digital power drivers in a digital
servo application, the statement ‘complete digital servo
loop’ becomes more realistic.
• Enable input for focus and radial driver
• Enable input for sledge driver
• Differential outputs for all drivers
• Separate power supply pins for all drivers.
QUICK REFERENCE DATA
SYMBOL PARAMETER MIN. TYP. MAX. UNIT
V
DDD
V
DD(F)
V
DD(R)
V
DD(S)
I
DDDq
I
DD(F)
I
DD(R)
I
DD(S)
f
i(clk)
P
tot
T
amb
digital supply voltage 4.5 − 5.5 V
supply voltage focus actuator 4.5 − 5.5 V
supply voltage radial actuator 4.5 − 5.5 V
supply voltage sledge actuator 4.5 − 5.5 V
quiescent supply current digital part −−10 µA
supply current focus − 126 250 mA
supply current radial − 20 250 mA
supply current sledge − 150 560 mA
input clock frequency − 4.2336 5 MHz
total power dissipation − 110 − mW
operating ambient temperature −40 − +85 °C
ORDERING INFORMATION
TYPE
NUMBER
NAME DESCRIPTION VERSION
PACKAGE
OQ8844 SO20 plastic small outline package; 20 leads; body width 7.5 mm SOT163-1
1995 Nov 27 2
Philips Semiconductors Product specification
Digital Servo Driver (DSD-2) OQ8844
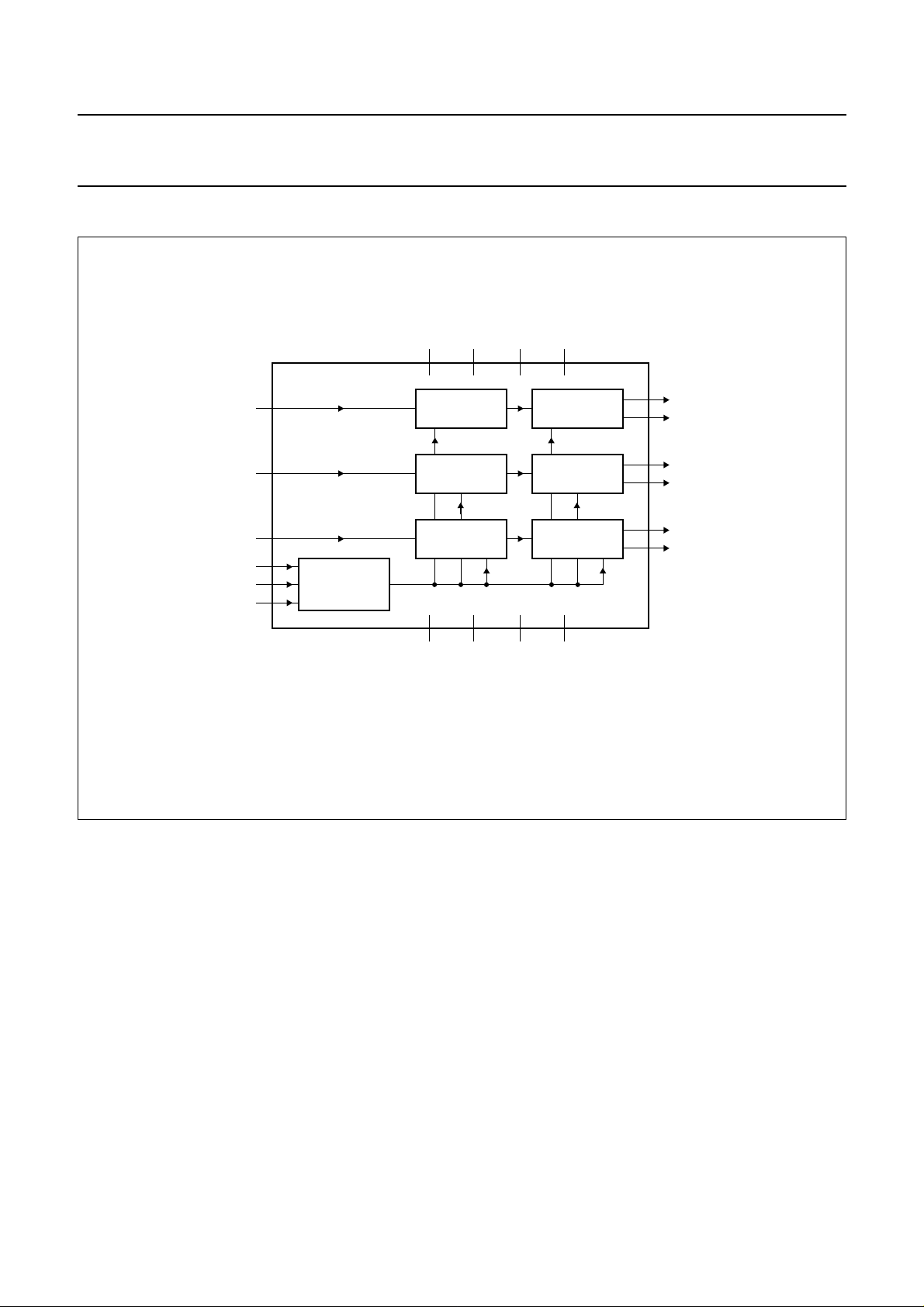
BLOCK DIAGRAM
RAC
FOC
SLC
CLI
EN1
EN2
4
3
2
7
8
9
OQ8844
CONTROL
V
V
V
DD(R)
DDD
613141
DIGITAL
NOTCH FILTER
DIGITAL
NOTCH FILTER
DIGITAL
NOTCH FILTER
5101718
V
SS(R)
SSD
V
DD(F)
V
SS(F)
V
DD(S)
ENDSTAGE
H−BRIDGE
ENDSTAGE
H−BRIDGE
ENDSTAGE
H−BRIDGE
V
SSS
11
12
15
16
19
20
MBG785
RA+
RA−
FO+
FO−
SL+
SL−
Fig.1 Block diagram.
1995 Nov 27 3
Philips Semiconductors Product specification
Digital Servo Driver (DSD-2) OQ8844
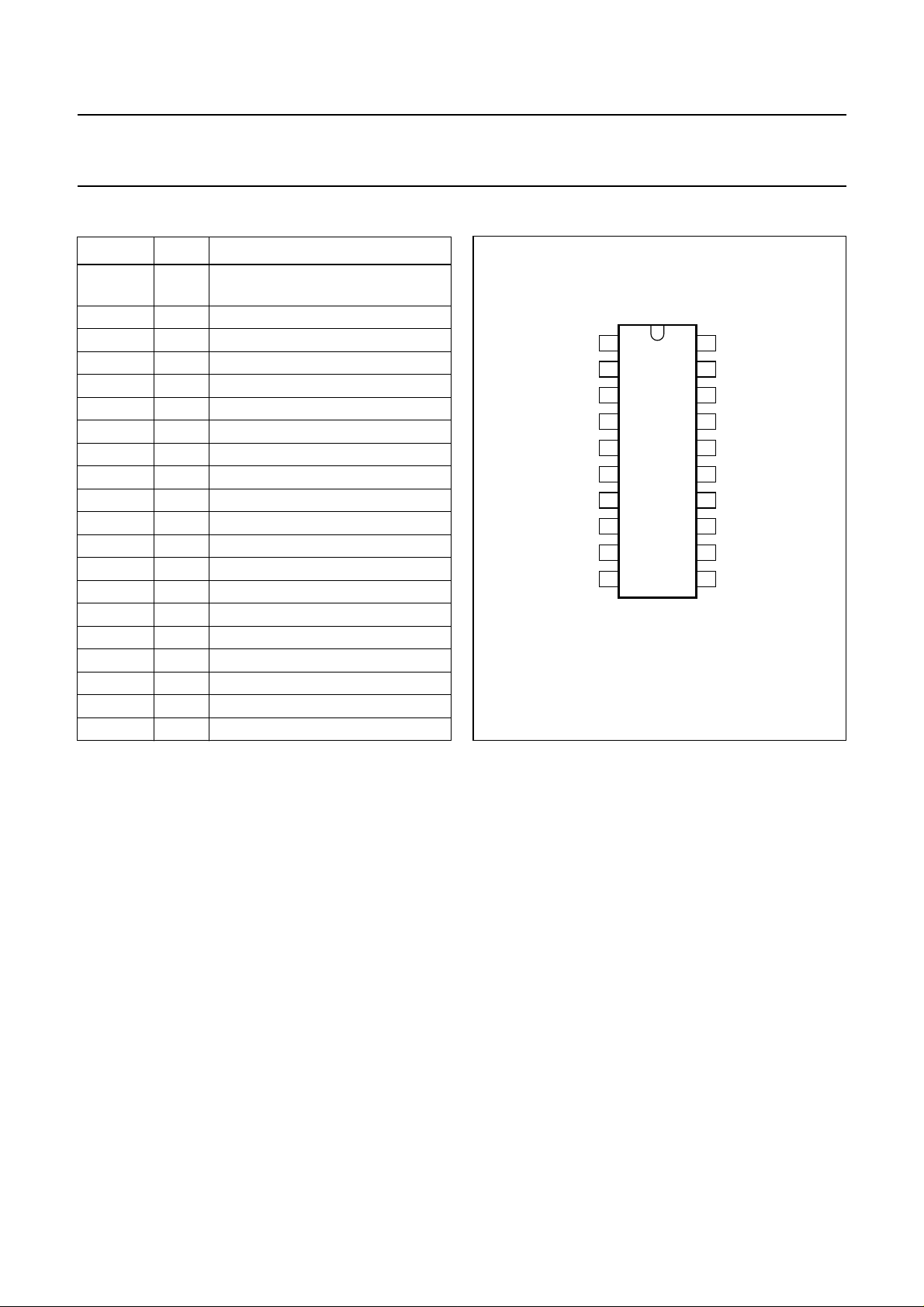
PINNING
SYMBOL PIN DESCRIPTION
V
DD(S)
SLC 2 PDM input for sledge driver
FOC 3 PDM input for focus driver
RAC 4 PDM input for radial driver
V
SSD
V
DDD
CLI 7 clock input
EN1 8 enable input 1
EN2 9 enable input 2
V
SS(R)
RA+ 11 radial driver (positive output)
RA− 12 radial driver (negative output)
V
DD(R)
V
DD(F)
FO+ 15 focus driver (positive output)
FO− 16 focus driver (negative output)
V
SS(F)
V
SSS
SL+ 19 sledge driver (positive output)
SL− 20 sledge driver (negative output)
supply voltage for sledge motor
1
driver
5 digital ground
6 digital supply voltage
10 radial driver ground
13 radial supply voltage
14 focus supply voltage
17 focus ground
18 sledge driver ground
handbook, halfpage
V
V
1
DD(S)
2
SLC
FOC
3
RAC
4
V
5
SSD
V
DDD
CLI
EN1
EN2 RA−
SS(R)
6
7
8
9
10
OQ8844
MBG784
Fig.2 Pin configuration.
20
SL−
SL+
19
V
18
SSS
V
17
SS(F)
16
FO−
15
FO+
V
14
DD(F)
V
13
DD(R)
12
11
RA+
1995 Nov 27 4

Philips Semiconductors Product specification
Digital Servo Driver (DSD-2) OQ8844
FUNCTIONAL DESCRIPTION
Principle of a class-D digital power driver
Figure 3 shows the block diagram of one of the digital
drivers integrated in the DSD2. It consists of a timing block
and four CMOS switches. The input signal is a 1-bit Pulse
Density Modulated (PDM) signal, the output of the digital
servo ICs.
The maximum operating clock frequency of the device is
5 MHz. With the mentioned digital servo ICs, the operating
frequency of the digital drivers is 4.2336 MHz
(96 × 44.1 kHz). The sampling frequency of the 1-bit code
however is 1.0584 MHz, so internally in the DSD2 the
clock speed of the switches will be 1.0584 MHz.
The higher input clock frequency is used to make
non-overlapping pulses to prevent short-circuits between
the supply voltages. For the control of the switches, two
states can be distinguished. If the 1-bit code contains a
logic 1, switches A and D are closed and current will flow
in the direction as shown in Fig.4.
If the 1-bit code contains a logic 0, switches B and C are
closed and current will flow in the opposite direction, as
shown in Fig.5.
This indicates that the difference between the mean
number of ones and zeros in the PDM signal determines
the direction in which the actuator or motor will rotate.
half the sample frequency of 1.0584 MHz. This results in a
high dissipation and the motor does not move.
To improve the efficiency, a digital notch filter is added at
the input of the digital drivers. This filters the Idle mode
pattern (1010101010 etc.) see Fig.6.
The amplitude transfer as a function of frequency is given
in Fig.7.
Figure 7 shows that the filter has a zero on
consequentially filtering out the idle pattern (101010).
The output of this filter is a three-level code (1.5-bit).
For the control of the switches three states (1.5-bit) can be
distinguished: the two states as described earlier and a
third one. This state is used when an idling pattern is
supplied.
Switches C and D are closed (see Fig.8). In this idle mode,
no current will flow and thus the efficiency will be improved.
This mode is also used to short-circuit the inductive
actuator/motor. In this way, high induction voltages are
prevented because the current can commutate via the
filter and the short-circuit in the switches. All three drivers
(radial, focus and sledge) contain a digital notch filter as
described. Each driver has its own power supply pins to
reduce crosstalk because of the relative high current
flowing through the pins.
1
⁄2fs,
If the mean number of ones and zeros is equal (Idle mode)
the current through the motor or actuator is alternated
between the positive and negative direction at a speed of
1995 Nov 27 5
 Loading...
Loading...