

Philips 74hc hct297 DATASHEETS
INTEGRATED CIRCUITS
DATA SH EET
For a complete data sheet, please also download:
•The IC06 74HC/HCT/HCU/HCMOS Logic Family Specifications
•The IC06 74HC/HCT/HCU/HCMOS Logic Package Information
•The IC06 74HC/HCT/HCU/HCMOS Logic Package Outlines
74HC/HCT297
Digital phase-locked-loop filter
Product specification
File under Integrated Circuits, IC06
September 1993
Philips Semiconductors Product specification
Digital phase-locked-loop filter 74HC/HCT297
FEATURES
• Digital design avoids analog compensation errors
• Easily cascadable for higher order loops
• Useful frequency range:
– DC to 55 MHz typical (K-clock)
– DC to 35 MHz typical (I/D-clock)
• Dynamically variable bandwidth
• Very narrow bandwidth attainable
• Power-on reset
• Output capability: standard/bus driver
• ICC category: MSI
GENERAL DESCRIPTION
The 74HC/HCT297 are high-speed Si-gate CMOS devices
and are pin compatible with low power Schottky TTL
(LSTTL). They are specified in compliance with JEDEC
standard no. 7A.
The 74HC/HCT297 are designed to provide a simple,
cost-effective solution to high-accuracy, digital,
phase-locked-loop applications. These devices contain all
the necessary circuits, with the exception of the
divide-by-n counter, to build first order
phase-locked-loops.
Both EXCLUSIVE-OR (XORPD) and edge-controlled
(ECPD) phase detectors are provided for maximum
flexibility. The input signals for the EXCLUSIVE-OR phase
detector must have a 50% duty factor to obtain the
maximum lock-range.
Proper partitioning of the loop function, with many of the
building blocks external to the package, makes it easy for
the designer to incorporate ripple cancellation (see Fig.7)
or to cascade to higher order phase-locked-loops.
The length of the up/down K-counter is digitally
programmable according to the K-counter function table.
With, A, B, C and D all LOW, the K-counter is disabled.
With A HIGH and B, C and D LOW, the K-counter is only
three stages long, which widens the bandwidth or capture
range and shortens the lock time of the loop. When A, B,
C and D are all programmed HIGH, the K-counter
becomes seventeen stages long, which narrows the
bandwidth or capture range and lengthens the lock time.
Real-time control of loop bandwidth by manipulating the A
to D inputs can maximize the overall performance of the
digital phase-locked loop.
The “297” can perform the classic first-order
phase-locked-loop function without using analog
components. The accuracy of the digital
phase-locked-loop (DPLL) is not affected by V
CC
and
temperature variations but depends solely on accuracies
of the K-clock, I/D-clock and loop propagation delays.
The phase detector generates an error signal waveform
that, at zero phase error, is a 50% duty factor square wave.
At the limits of linear operation, the phase detector output
will be either HIGH or LOW all of the time depending on the
− φ
direction of the phase error (φ
IN
). Within these limits
OUT
the phase detector output varies linearly with the input
phase error according to the gain k
, which is expressed in
d
terms of phase detector output per cycle or phase error.
The phase detector output can be defined to vary between
± 1 according to the relation:
phase detector output
% HIGH % LOW–
------------------------------------------------
The output of the phase detector will be k
phase error φ
= φIN−φ
e
OUT
.
˙˙
100
, where the
dφe
.=
EXCLUSIVE-OR phase detectors (XORPD) and
edge-controlled phase detectors (ECPD) are commonly
used digital types. The ECPD is more complex than the
XORPD logic function but can be described generally as a
circuit that changes states on one of the transitions of its
inputs. The gain (k
remains HIGH (XORPD
) for an XORPD is 4 because its output
d
= 1) for a phase error of 1/4
OUT
cycle.
Similarly, k
for the ECPD is 2 since its output remains
d
HIGH for a phase error of 1/2 cycle. The type of phase
detector will determine the zero-phase-error point, i.e., the
phase separation of the phase detector inputs for a
φ
defined to be zero. For the basic DPLL system of
e
Fig.6 φ
= 0 when the phase detector output is a square
e
wave.
The XORPD inputs are 1/4 cycle out-of-phase for zero
phase error. For the ECPD, φ
= 0 when the inputs are 1/2
e
cycle out-of-phase.
The phase detector output controls the up/down input to
the K-counter. The counter is clocked by input frequency
Mfc, which is a multiple M of the loop centre frequency fc.
When the K-counter recycles up, it generates a carry
pulse. Recycling while counting down generates a borrow
pulse. If the carry and the borrow outputs are conceptually
combined into one output that is positive for a carry and
negative for a borrow, and if the K-counter is considered as
a frequency divider with the ratio Mfc/K, the output of the
K-counter will equal the input frequency multiplied by the
division ratio. Thus the output from the K-counter is
(kdφeMfc) / K.
September 1993 2

Philips Semiconductors Product specification
Digital phase-locked-loop filter 74HC/HCT297
The carry and borrow pulses go to the
increment/decrement (I/D) circuit which, in the absence of
any carry or borrow pulses has an output that is 1/2 of the
input clock (I/DCP). The input clock is just a multiple, 2N, of
the loop centre frequency. In response to a carry or borrow
pulse, the I/D circuit will either add or delete a pulse at
I/D
. Thus the output of the I/D circuit will be
OUT
Nfc+ (kd∅eMfc)/2K.
The output of the N-counter (or the output of the
phase-locked-loop) is thus: fo=fc+(kdφeMfc)/2KN.
If this result is compared to the equation for a first-order
analog phase-locked-loop, the digital equivalent of the
gain of the VCO is just Mfc/2KN or fc/K for M = 2N.
Thus the simple first-order phase-locked-loop with an
adjustable K-counter is the equivalent of an analog
phase-locked-loop with a programmable VCO gain.
QUICK REFERENCE DATA
GND = 0 V; T
=25°C; tr=tf= 6 ns
amb
SYMBOL PARAMETER CONDITIONS
t
PHL/ tPLH
f
max
C
I
C
PD
propagation delay CL= 15 pF; VCC=5 V
I/D
to I/D
CP
, φB to XORPD
φA
1
φB, φA
OUT
to ECPD
2
OUT
OUT
maximum clock frequency
K
CP
I/D
CP
input capacitance 3.5 3.5 pF
power dissipation capacitance per package notes 1 and 2 18 19 pF
TYPICAL
UNIT
HC HCT
15 18 ns
13 13 ns
19 19 ns
63 68 MHz
41 40 MHz
Notes
1. C
is used to determine the dynamic power dissipation (PD in µW):
PD
PD=CPD× V
2
× fi+ ∑ (CL× V
CC
2
× fo) where:
CC
fi= input frequency in MHz
fo= output frequency in MHz
∑ (CL× V
2
× fo) = sum of outputs
CC
CL= output load capacitance in pF
VCC= supply voltage in V
2. For HC the condition is VI= GND to V
CC
For HCT the condition is VI= GND to VCC− 1.5 V
ORDERING INFORMATION
“74HC/HCT/HCU/HCMOS Logic Package Information”
See
.
September 1993 3
Philips Semiconductors Product specification
Digital phase-locked-loop filter 74HC/HCT297
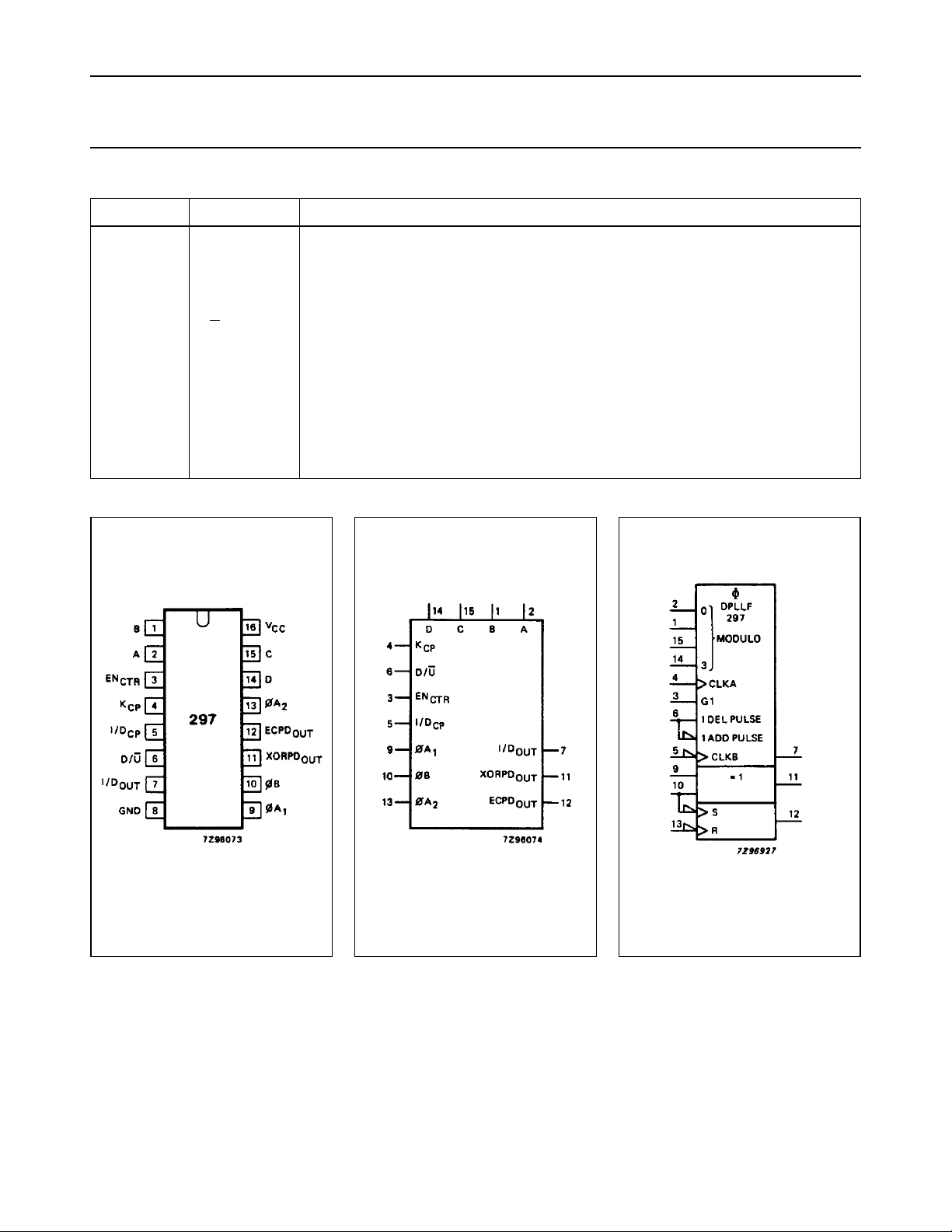
PIN DESCRIPTION
PIN NO. SYMBOL NAME AND FUNCTION
2, 1, 15, 14 A, B, C, D modulo control inputs
3EN
4K
5 I/D
6D/
7 I/D
CTR
CP
CP
U down/up control
OUT
8 GND ground (0 V)
9, 10, 13 φA
11 XORPD
12 ECPD
16 V
, φB, φA
1
CC
OUT
OUT
K-counter enable input
K-counter clock input (LOW-to-HIGH, edge-triggered)
increment/decrement clock input (HIGH-to-LOW, edge-triggered)
increment/decrement bus output
phase inputs
2
EXCLUSIVE-OR phase detector output
edge-controlled phase detector output
positive supply voltage
Fig.1 Pin configuration. Fig.2 Logic symbol. Fig.3 IEC logic symbol.
September 1993 4
 Loading...
Loading...