

Page 1
3
PROCESS AUTOMATION
MANUAL
HART Multiplexer
System
KFD*-HM*-16
ISO9001
Page 2

HART Multiplexer System KFD*-HM*-16
With regard to the supply of products, the current issue of the following document is applicable: The General Terms of
Delivery for Products and Services of the Electrical Industry, published by the Central Association of the Electrical
Industry (Zentralverband Elektrotechnik und Elektroindustrie (ZVEI) e.V.) in its most recent version as well as the
supplementary clause: "Expanded reservation of proprietorship"
Page 3

HART Multiplexer System KFD*-HM*-16
Content
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1 Manufacturer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Content of this Document. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Target Group, Personnel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Symbols Used . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Product Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Device Versions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 System Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.1 The Basic Principles of HART Communication . . . . . . . . . . . . . . . . . . 10
3.2 Possible Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.3 Integration into Operating Software . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.4 System Structure. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4 Mounting and Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.1 DIN Mounting Rail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.2 Power Rail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.3 Mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.4 Connecting the Multiplexer Master . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.5 Connecting the Multiplexer Slaves . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.6 Connecting the Termination Board . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.7 Information Regarding Electromagnetic Compatibility . . . . . . . . . . . 27
5 Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.1 Data Access to the Connected Field Devices . . . . . . . . . . . . . . . . . . . 28
5.2 Configuration of the Multiplexer Master. . . . . . . . . . . . . . . . . . . . . . . . 28
2018-04
3
Page 4

HART Multiplexer System KFD*-HM*-16
Content
6 Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.1 Introduction to PACTware Operating Software. . . . . . . . . . . . . . . . . . 33
6.2 Software Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.3 PACTware Main Window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.4 Connecting with the Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.5 Inserting the Communication DTM . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.6 Inserting the Multiplexer Devices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.7 Displaying Device Information and Setting Parameters . . . . . . . . . . 44
6.8 HART Scan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
6.9 Adding DTMs Manually . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
7 Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.1 Device Functions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7.2 Software Functions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
7.3 Diagnosis and Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
8 Dismounting, Maintenance, and Repair . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
9 Appendix. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
9.1 Supported HART Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
9.2 Assignment of the 26-Pin IDC Socket with Analog HART Signals . . 84
9.3 Bibliography . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
9.4 Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
2018-04
4
Page 5
HART Multiplexer System KFD*-HM*-16
Introduction
1Introduction
1.1 Manufacturer
Pepperl+Fuchs GmbH
Lilienthalstraße 200, 68307 Mannheim, Germany
Internet: www.pepperl-fuchs.com
1.2 Content of this Document
This document contains information that you need in order to use your product throughout
the applicable stages of the product life cycle. These can include the following:
• Product identification
• Delivery, transport, and storage
• Mounting and installation
• Commissioning and operation
• Maintenance and repair
• Troubleshooting
• Dismounting
• Disposal
Note!
This document does not substitute the instruction manual.
Note!
For full information on the product, refer to the instruction manual and further documentation
on the Internet at www.pepperl-fuchs.com.
The documentation consists of the following parts:
• Present document
• Instruction manual
•Datasheet
Additionally, the following parts may belong to the documentation, if applicable:
• EU-type examination certificate
• EU declaration of conformity
• Attestation of conformity
• Certificates
• Control drawings
• Additional documents
2018-04
5
Page 6
HART Multiplexer System KFD*-HM*-16
Introduction
1.3 Target Group, Personnel
Responsibility for planning, assembly, commissioning, operation, maintenance,
and dismounting lies with the plant operator.
Only appropriately trained and qualified personnel may carry out mounting, installation,
commissioning, operation, maintenance, and dismounting of the product. The personnel must
have read and understood the instruction manual and the further documentation.
Prior to using the product make yourself familiar with it. Read the document carefully.
1.4 Symbols Used
This document contains symbols for the identification of warning messages and of
informative messages.
Warning Messages
You will find warning messages, whenever dangers may arise from your actions.
It is mandatory that you observe these warning messages for your personal safety and in order
to avoid property damage.
Depending on the risk level, the warning messages are displayed in descending order
as follows:
Danger!
This symbol indicates an imminent danger.
Non-observance will result in personal injury or death.
Warning!
This symbol indicates a possible fault or danger.
Non-observance may cause personal injury or serious property damage.
Caution!
This symbol indicates a possible fault.
Non-observance could interrupt the device and any connected systems and plants,
or result in their complete failure.
Informative Symbols
Note!
This symbol brings important information to your attention.
Action
This symbol indicates a paragraph with instructions. You are prompted to perform an action
or a sequence of actions.
2018-04
6
Page 7

HART Multiplexer System KFD*-HM*-16
Product Specifications
2 Product Specifications
2.1 Device Versions
This manual describes the following devices:
• HART multiplexer master KFD2-HMM-16, hereinafter referred to as the multiplexer master
• HART multiplexer slave KFD0-HMS-16, hereinafter referred to as the multiplexer slave
2.2 Function
The HART multiplexer system consists of one HART multiplexer master KFD2-HMM-16 and
several HART multiplexer slaves KFD0-HMS-16. The HART multiplexer system is used
to establish a HART connection to analog field devices and thereby maintain the conventional
analog 4 mA to 20 mA circuits. The devices of the HART multiplexer system act as gateways
between the field devices and the control side.
The devices of the HART multiplexer system can be used in the Zone 2 hazardous area or
in the non-hazardous area. The devices are supplied with 24 VDC. The devices are connected
to a maintenance station or the process control system via an RS-485 interface.
The supply, the analog signals, and the RS-485 interface are galvanically isolated from each
other. The individual HART channels are decoupled. This does not affect
the 4 mA to 20 mA signal.
Using the configuration software, you can search for available field devices automatically and
query the HART variables of the field devices automatically.
2018-04
7
Page 8
HART Multiplexer System KFD*-HM*-16
1
2
3
4
5
6
7
8
19
17131816
201421
15
KFD0-HMM-16
1
26
26-pin connector
LED orange:
Operation
14-pin connector
Removable terminals
green
LED red:
Fault signal
LED green:
Power supply
Product Specifications
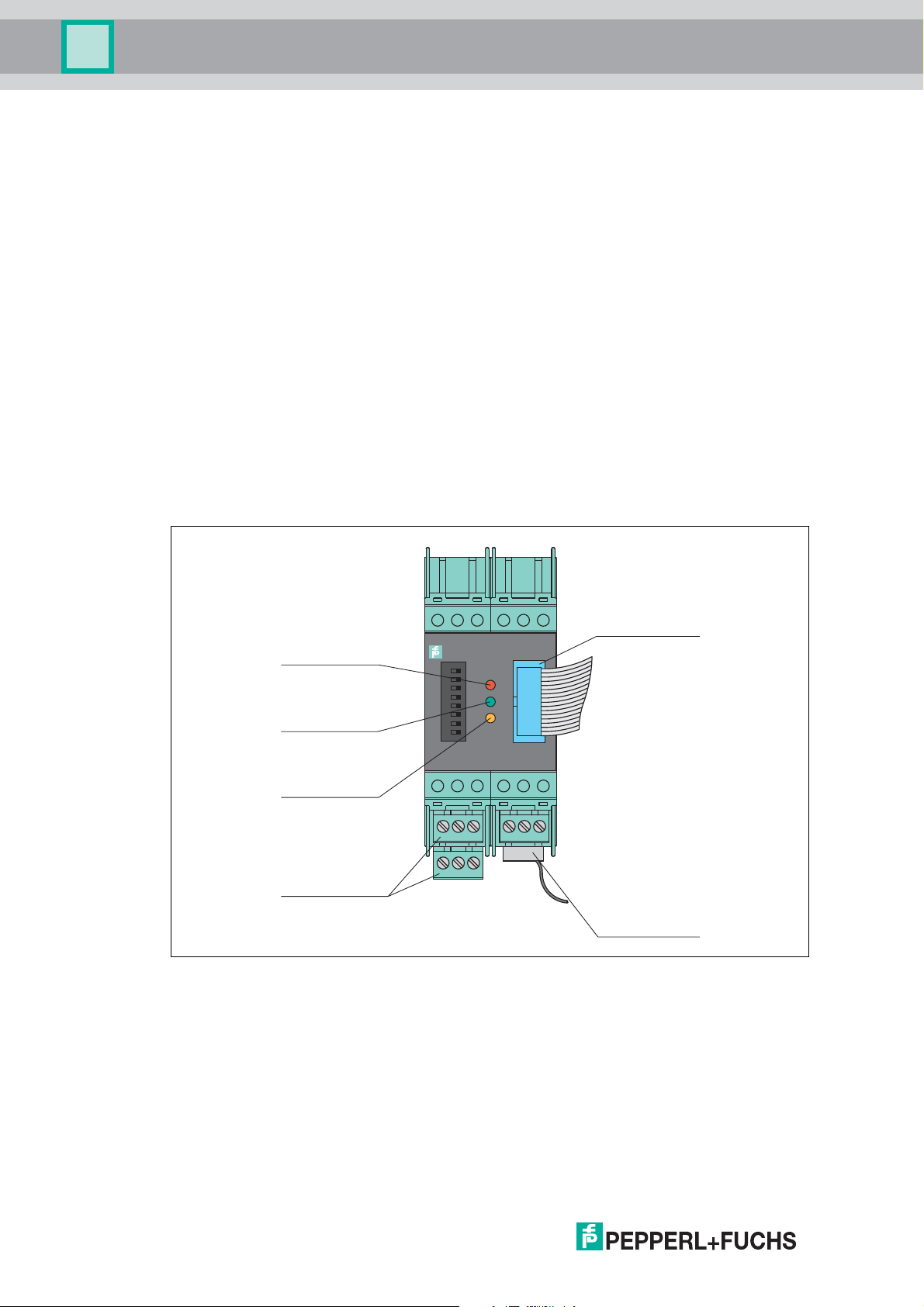
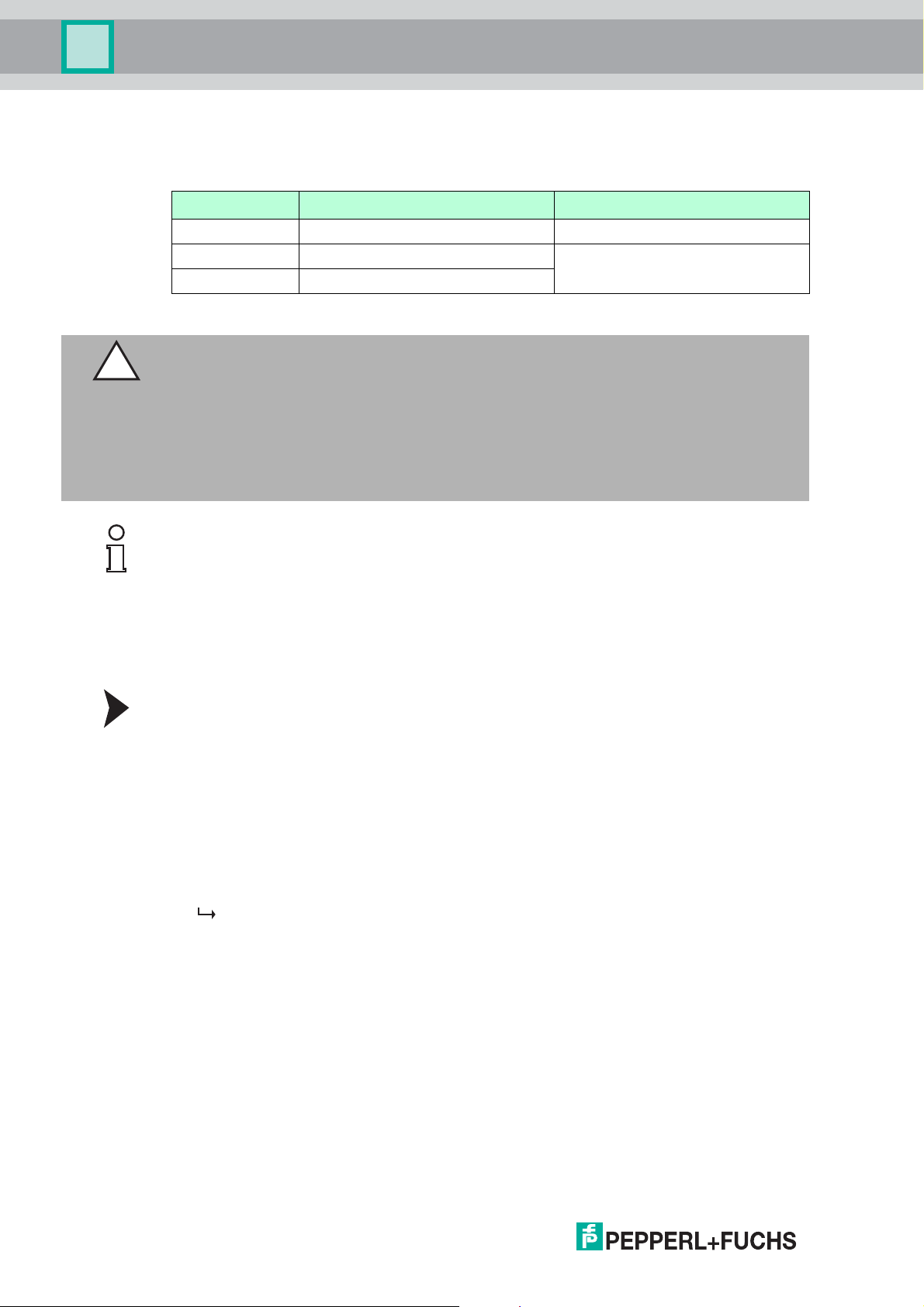
2.2.1 HART Multiplexer Master KFD2-HMM-16
In addition to the master unit, the multiplexer master has an integrated slave unit. A maximum
of 16 field devices can be connected to this slave unit. If more than 16 field devices have
to be connected, a maximum of 15 additional HART multiplexer slaves KFD0-HMS-16 can
be connected to the multiplexer master. This enables a maximum of 256 analog field devices
to be connected to the HART multiplexer system.
The device is supplied with power via the Power Rail or via terminals.
The device is connected to a maintenance station via the RS-485 interface. You can connect
additional participants via an additional RS-485 interface. The transfer rate is max.
57600 baud.
The device is connected to the multiplexer slaves via a 14-pin ribbon cable. The device has
a 14-pin IDC socket on the bottom of the device for this purpose.
The device is connected to the termination board via a 26-pin ribbon cable. The device has
a 26-pin IDC socket on the front of the device for this purpose.
The device can be used as a primary or secondary master.
The device address and the transfer rate are set via DIP switch.
8
Figure 2.1 Assembly of the KFD2-HMM-16 HART multiplexer master
2018-04
Page 9
HART Multiplexer System KFD*-HM*-16
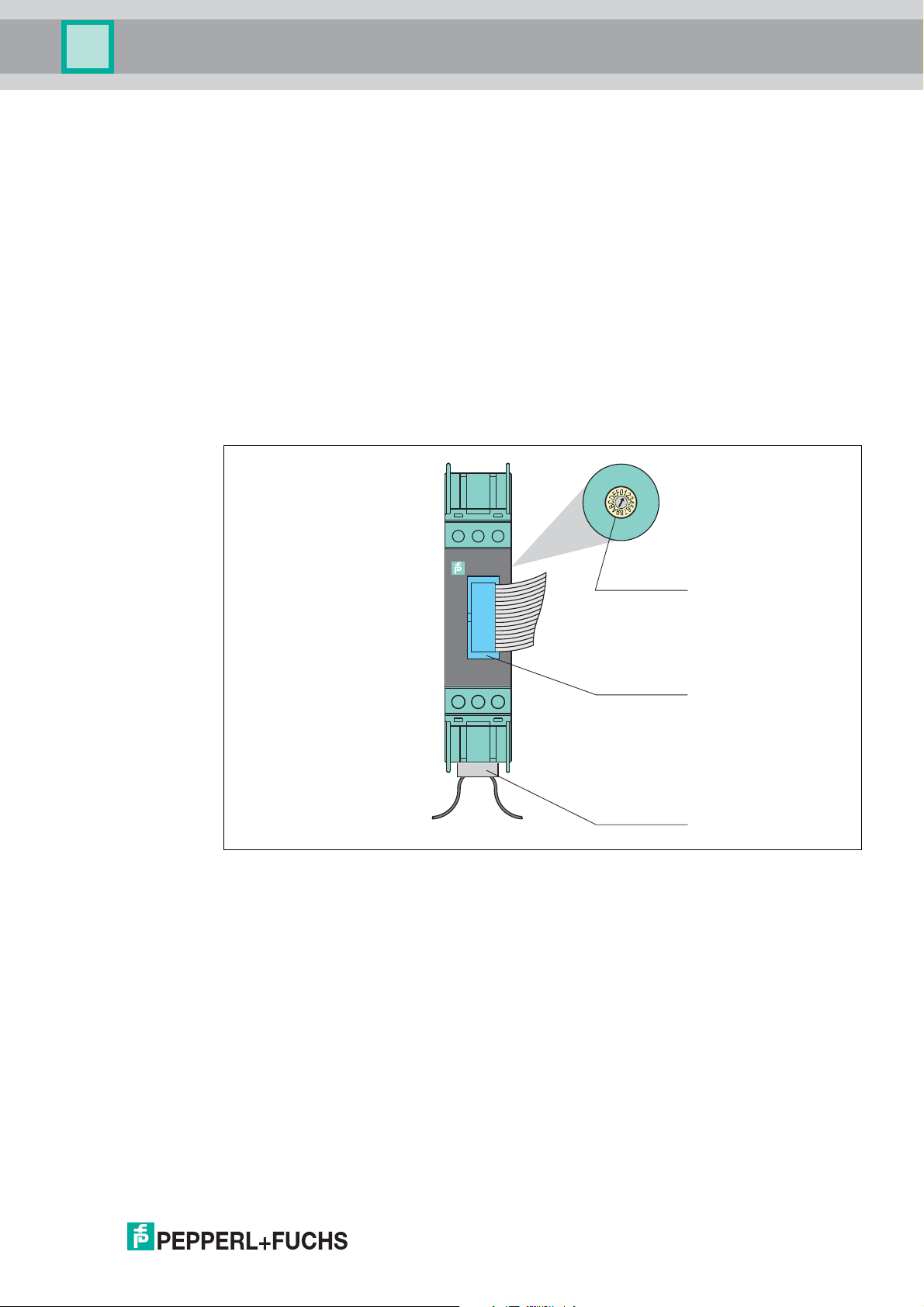
KFD0-HMS-16
1
26
Rotary switch
26 pin
connector
14 pin
connector
Product Specifications
2.2.2 HART Multiplexer Slave KFD0-HMS-16
A maximum of 16 analog field devices can be connected to the multiplexer slave. The device
can only be used in conjunction with the HART multiplexer master KFD2-HMM-16.
The device is supplied with power by the multiplexer master via the 14-pin ribbon cable.
The device is connected with the multiplexer master and additional multiplexer slaves
via a 14-pin ribbon cable. The device has a 14-pin IDC socket on the bottom of the device for
this purpose.
The device is connected to the termination board via a 26-pin ribbon cable.
The device has a 26-pin IDC socket on the front of the device for this purpose.
The device address is set using a rotary switch. You can assign addresses 1 to 15.
The address 0 is reserved for the multiplexer master and may therefore not be used. If several
multiplexer slaves are connected to the multiplexer master, different addresses must
be assigned. The sequence is irrelevant.
2018-04
Figure 2.2 Assembly of the KFD0-HMS-16 HART multiplexer slave
9
Page 10
HART Multiplexer System KFD*-HM*-16
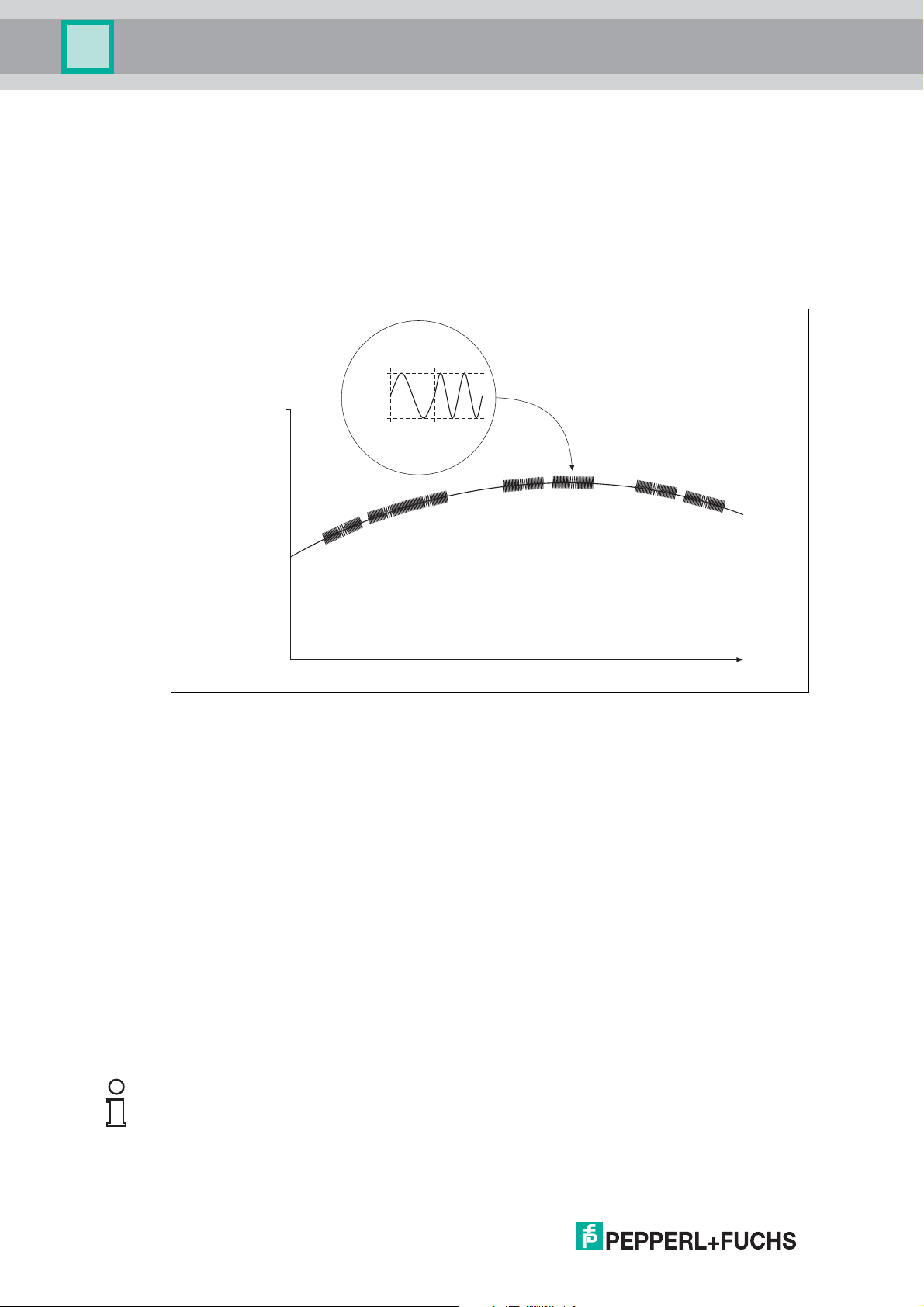
+0.5 mA
-0.5 mA
0
1200 Hz 2200 Hz
"1"
"0"
20 mA
4 mA
Analog
signal
C = Command
R = Response
Time (seconds)
HART signal
C
R
C
R
C
R
System Description
3 System Description
3.1 The Basic Principles of HART Communication
The HART protocol is supported by many conventional 4mAto20mA field devices that use it
to enable digital communication for configuration and maintenance purposes. Many of the
device parameters, and the measured value itself, can be digitally transferred to and from
the device. This digital communication runs in parallel to the 4 mA to 20 mA signal on the same
line. This is enabled via current modulation, which is superimposed on the desired signal.
Figure 3.1
The high-frequency HART signal consists of the sine frequencies 1200 Hz and 2200 Hz.
The average value of the signal is 0 and can therefore be filtered through the standard circuit of
the analog input. This does not affect the analog signal.
The HART protocol is a master-slave protocol. This means that a field device responds only
when it is addressed. Burst mode is an exception. The message duration is a few hundred
milliseconds, meaning that two to three messages can be transferred per second.
The HART commands are divided into 3 groups:
• Universal commands
These commands must be supported by all field devices.
• Common practice commands
These commands correspond to common practice and are suitable for many field devices.
• Device-specific commands
These commands are only suitable for certain field devices.
All three types of commands are used in the HART multiplexer system. This document
includes a list of commands. See chapter 9.1.
Note!
Additional information can be found in /1/, /2/, /3/, see chapter 9.3.
2018-04
10
Page 11

HART Multiplexer System KFD*-HM*-16
System Description
3.2 Possible Applications
General Applications
In process engineering plants, many field devices are distributed over a large area.
The characteristic values of these field devices must be monitored and logged or adjusted if
process variables are changed.
The HART multiplexer system from Pepperl+Fuchs enables communication between a
computer or a process control system and field devices that support the HART protocol.
The following figure shows the basic system structure.
HART communication 1 HART communication 2
19
KFD0-HMM-16
1
2
3
4
5
6
7
8
1713 181620142115
Host
Computer-based
maintenance station
or process control system
HART multiplexer system
Field devices
Figure 3.2 Basic structure
HART-compatible field devices allow information such as the measuring range and device
address to be saved in the field device itself. Access to this data is usually achieved with a
handheld. This means that a connection to the field device must be established manually for
each value to be changed.
If certain data has to be logged as part of quality assurance processes, this increases the effort
for the process control system. For example, the relevant data has to be requested cyclically
and saved in a database by the system.
The HART multiplexer system establishes the connection between the computer and the
HART-compatible field devices. All access to the field device takes place parallel to the
transmission of the 4 mA to 20 mA signal and therefore has no affect on the processing of
measured values by the process control system.
The system provides a subordinate service level. The HART multiplexer system can also
detect measured values. For field devices that are mounted in hazardous areas,
the connection takes place on the non-hazardous side of the control unit.
Pepperl+Fuchs offers corresponding control units, e. g., KCD2-STC-**, KCD2-SCD-**.
The HART multiplexer system can also be connected to control units from other
manufacturers. Existing plants can therefore be extended very easily, taking full advantage of
the HART communication.
2018-04
The system can consist of a maximum of 31 HART multiplexer devices that are connected to a
computer via an RS-485 interface. Each multiplexer master can manage up to
15 multiplexer slaves. Each device, regardless of whether it is a multiplexer master or
multiplexer slave, establishes the connection to 16 field devices. One computer can therefore
be used to address up to a maximum of 7936 field devices.
Operation using a handheld is still possible, since the HART protocol accepts two masters in
one system, i. e., a computer and a handheld.
11
Page 12
HART Multiplexer System KFD*-HM*-16
System Description
Maintenance Station
A computer is often used as a maintenance station to operate and maintain the
HART multiplexer system. The computer is used to fulfill parameterization functions or logging
functions independently of the process control system. For this computer, operating software
that fulfills the required purpose is available from various manufacturers. See chapter 3.3.
However, in some cases, no computer is used as a maintenance station. Instead,
the process control system communicates with the field devices directly via an
RS-485 interface using the HART multiplexer system. The low speed of the
HART communication imposes limitations on this method of operation.
3.3 Integration into Operating Software
The full functionality of the HART multiplexer system unfolds through the integration into
modern asset management systems such as PACTwa re (open source), SIMATIC PDM
(Siemens), AMS (Fisher-Rosemount), Cornerstone (Applied System Technologies), and Valve
Manager (Neles Automation). These operating tools integrate the device functions of the
devices in the multiplexer system into a standardized interface and convenient operation in
the form of menu commands. However, the representation and designation of the functions in
the individual operating tools may vary greatly. A representation that is valid generally is not
possible at this point.
Information regarding the configuration, parameterization, operation, and diagnostic options
of the HART multiplexer system can be found in the manual "Installation and Configuration
Device Type Manager (DTM)".
3.4 System Structure
The field devices and the devices of the HART multiplexer system are connected to
the process control system using termination boards. The following chapters describe
three basic connection options. These connection options serve as examples as there are
many other connection options.
Note!
For further information about the connection layout of the termination boards used, see the
corresponding datasheets.
The following accessories are available for the HART multiplexer system:
• 14-pin ribbon cable K-HM14 for connecting the multiplexer master with the
multiplexer slaves.
• 26-pin ribbon cable K-HM26 for connecting the multiplexer master or the multiplexer slave
with the termination board.
• Interface converter in different variants depending on the available interfaces
• Cordset for the connection between the termination board and the process control system.
This cordset is available in different variants depending on the available interfaces and
the control system manufacturer.
12
Note!
Additional information you can find under www.pepperl-fuchs.com.
2018-04
Page 13
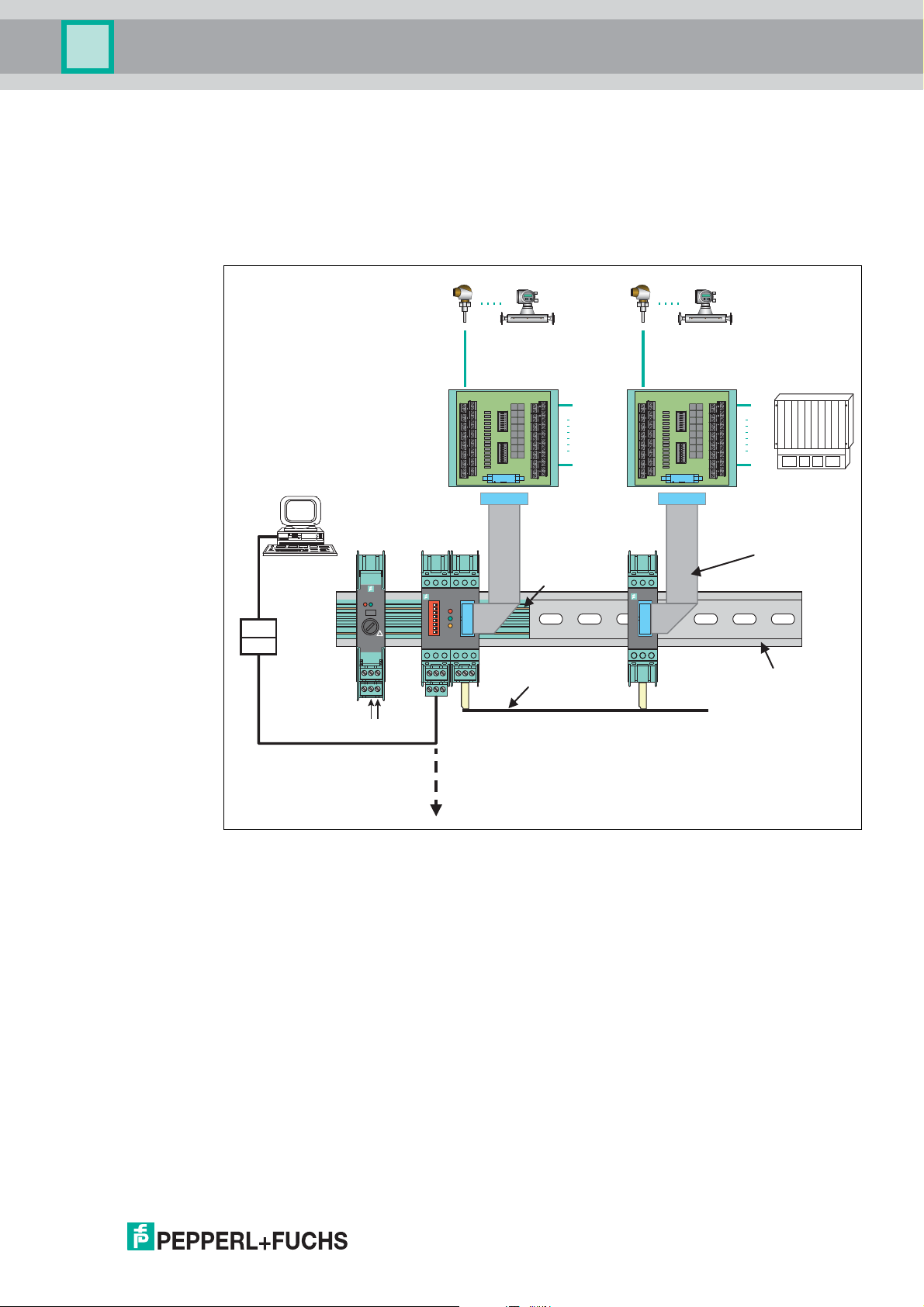
HART Multiplexer System KFD*-HM*-16
Converter
26 -pin ribbon cable
14-pin ribbon cable
DIN mounting rail
up to 31 HART multiplexer masters
up to 15 HART multiplexer slaves per master
24 V DC
RS-485
connection
Up to 16
field devices
Up to 16
field devices
DCS
Computer-based
maintenance station
1
2
3
4
5
6
7
8
19
1713 181620142115
KFD0-HMM-16
KFD0-HMS-16
1
3
4
6
2
5
13 15
12
9
10
7
14
11
8
KFD2-EB2
ERRPWR
!
5 AT
IIIS1
Termination
board
Termination
board
Power Rail
System Description
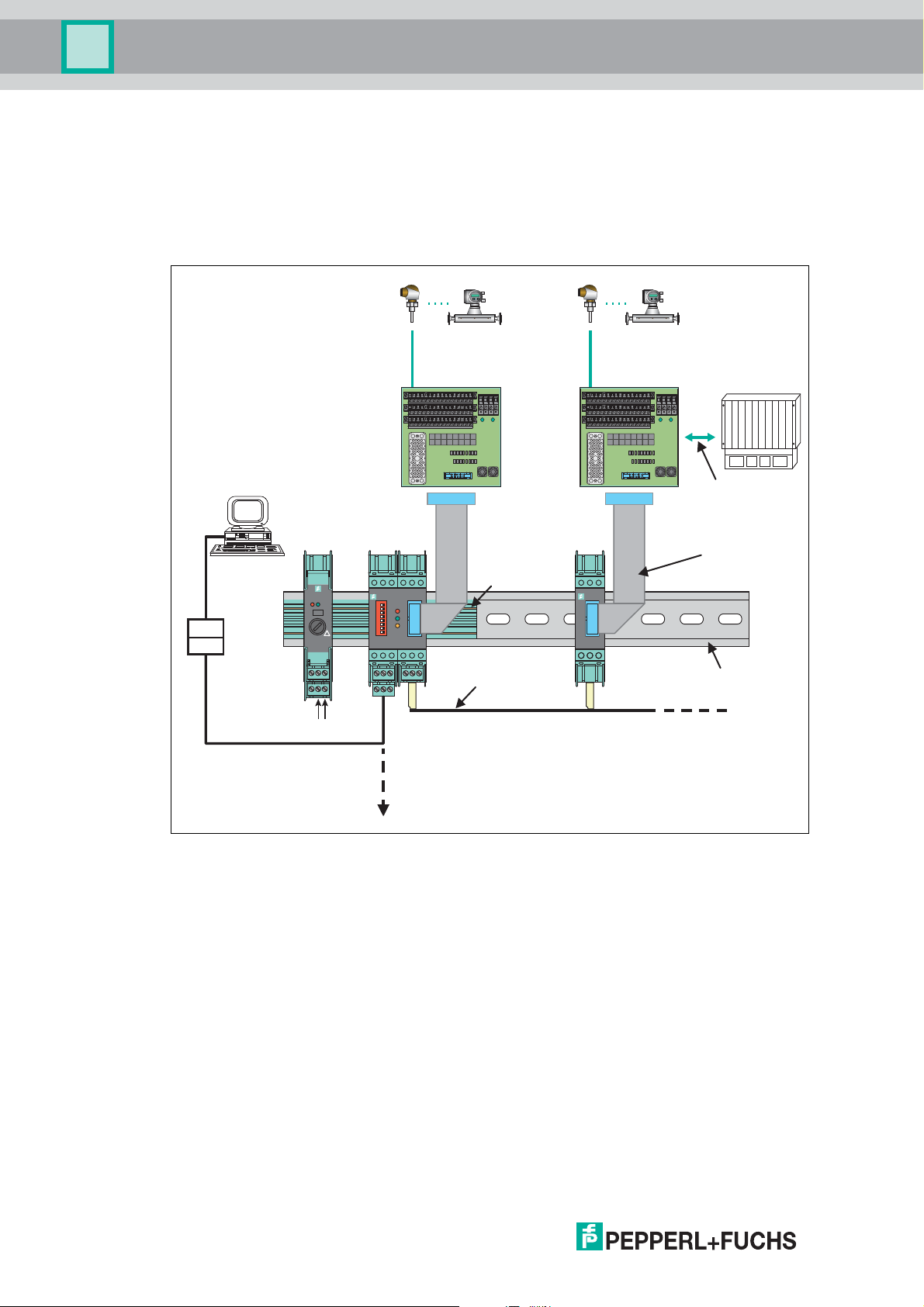
3.4.1 External Mounting
The multiplexer master and multiplexer slaves are connected to a termination board.
The termination board forwards the signals via screw terminals. The termination board
establishes the connection to the connected multiplexer masters and multiplexer slaves in
parallel or series. This type of mounting is independent of the process control system used and
of any existing control units.
2018-04
Figure 3.3
13
Page 14
HART Multiplexer System KFD*-HM*-16
Converter
26 -pin ribbon cable
14-pin ribbon cable
DIN mounting rail
up to 15 HART multiplexer slaves per master
24 V DC
Up to 16
field devices
Up to 16
field devices
DCS
Connection via
system connector
Computer-based
maintenance station
up to 31 HART multiplexer masters
RS-485
connection
1
2
3
4
5
6
7
8
19
1713 181620142115
KFD0-HMM-16
KFD0-HMS-16
1
3
4
6
2
5
13 15
12
9
10
7
14
11
8
KFD2-EB2
ERRPWR
!
5 AT
IIIS1
Termination
board
Termination
board
Power Rail
System Description
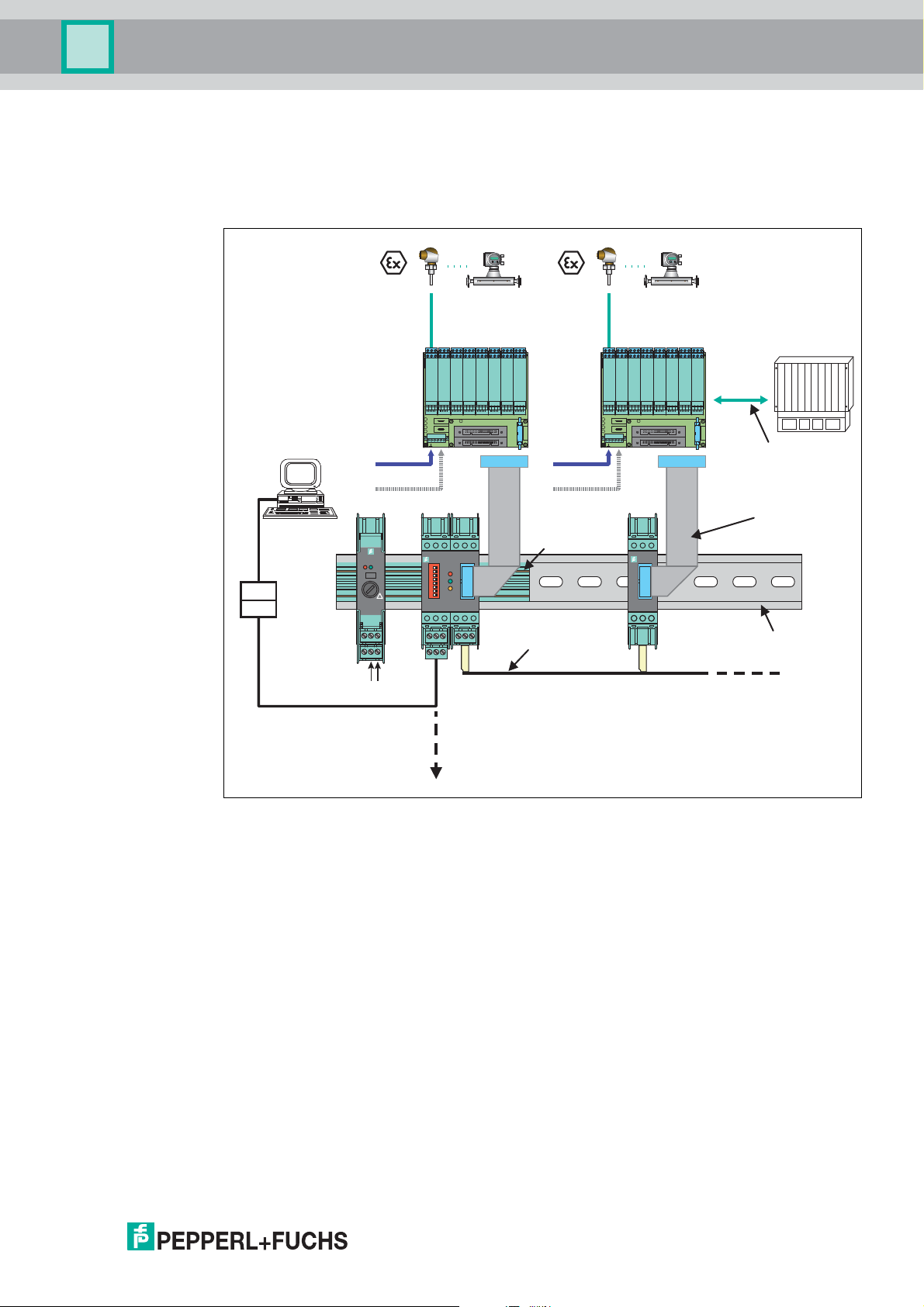
3.4.2 Mounting Integrated in the Process Control System
The multiplexer master and multiplexer slaves are connected to a termination board.
The termination board forwards the signals to the process control system via screw terminals
and system cables. The termination board establishes the connection to the connected
multiplexer masters and multiplexer slaves in parallel or series. The termination boards are
specifically tailored to the individual process control systems.
14
Figure 3.4
2018-04
Page 15
HART Multiplexer System KFD*-HM*-16
Converter
26 -pin ribbon cable
14-pin ribbon cable
DIN mounting rail
up to 15 HART multiplexer slaves per master
24 V DC
Up to 16
field devices
DCS
Redundant
power supply
Power supply
Termination board
with isolators
Up to 16
field devices
Redundant
power supply
Power supply
Termination board
with isolators
Connection via
system connector
Computer-based
maintenance station
up to 31 HART multiplexer masters
RS-485
connection
1
2
3
4
5
6
7
8
19
1713 181620142115
KFD0-HMM-16
KFD0-HMS-16
1
3
4
6
2
5
13 15
12
9
10
7
14
11
8
KFD2-EB2
ERRPWR
!
5 AT
IIIS1
Power Rail
System Description
3.4.3 Mounting Integrated into the K-System
If you use this connection option, the signals can be transferred directly from the
termination boards of the K-system to the multiplexer master and multiplexer slaves via a
system connector.
2018-04
Figure 3.5
15
Page 16
HART Multiplexer System KFD*-HM*-16
Mounting and Installation
4 Mounting and Installation
Danger!
Explosion hazard from damaged electronic components
Premature wear of electronic components in a device that was previously used in a general
electrical installation can cause sparks that can ignite the surrounding potentially explosive
atmosphere.
Never install devices that have already been operated in general electrical installations in
electrical installations used in combination with hazardous areas!
Danger!
Explosion hazard from pollution
An excessively polluted surface of the device can become conductive and consequently
ignite a surrounding potentially explosive atmosphere.
Ensure that you install the device only in environments with a pollution degree 2 or better
according to IEC/EN 60664–1.
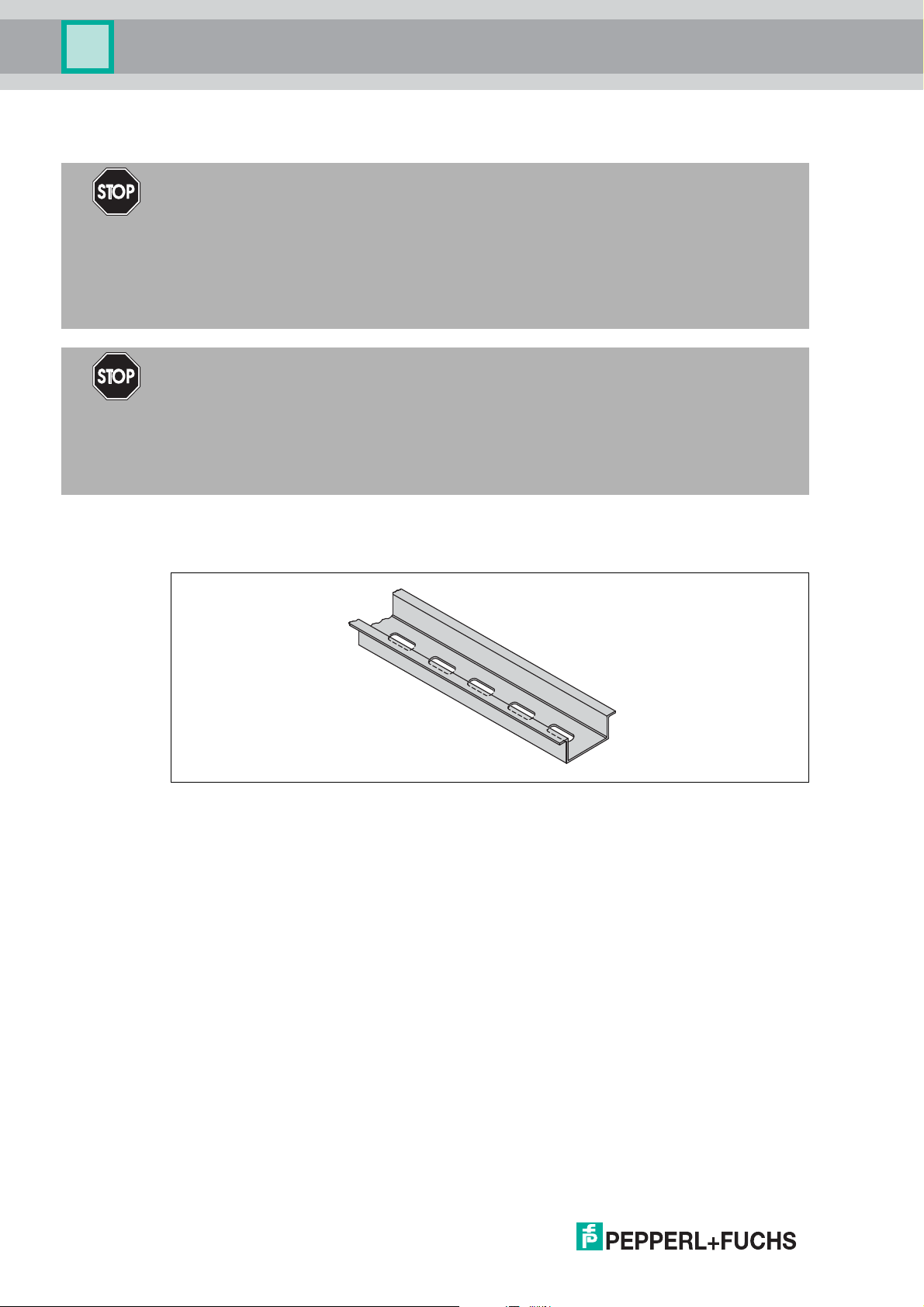
4.1 DIN Mounting Rail
The devices are mounted on a 35 mm DIN mounting rail according to EN 60715.
Figure 4.1 Example: DIN mounting rail UPR-MR (35 mm x 15 mm)
16
2018-04
Page 17
HART Multiplexer System KFD*-HM*-16
1
2
34
Mounting and Installation
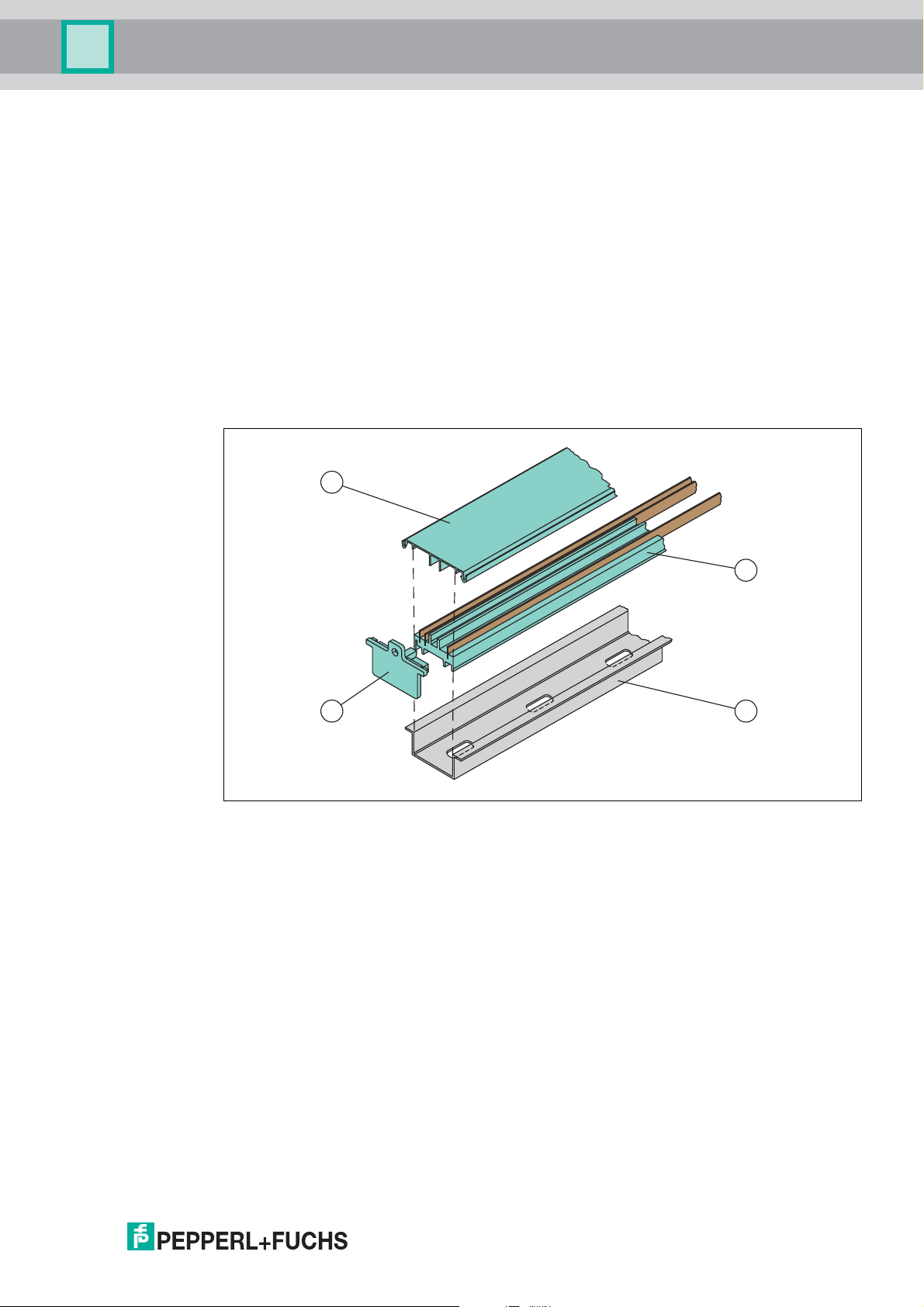
4.2 Power Rail
To reduce wiring and installation costs, Power Rail is the optimum solution. The Power Rail is a
DIN mounting rail with plastic insert, that delivers power to the devices (24 V DC) and transfers
bus signals and a collective error message.
The Power Rail is factory-equipped with cover and end caps. These parts cover empty and
open segments of the Power Rail. Thus, the Power Rail is protected from contamination.
Additionally the cover and end caps prevent that electrically conductive parts come in contact
with the Power Rail.
Power Rail UPR-03
The Power Rail UPR–03 has 3 conductors.
• 2 conductors for power
• 1 conductor for collective error messaging
Figure 4.2 Example: Power Rail UPR-03
1 Cover UPR-COVER
2 Insert UPR-INS-03
3 DIN mounting rail UPR-MR (35 mm x 15 mm)
4 End cap UPR-E
2018-04
17
Page 18
HART Multiplexer System KFD*-HM*-16
Mounting and Installation
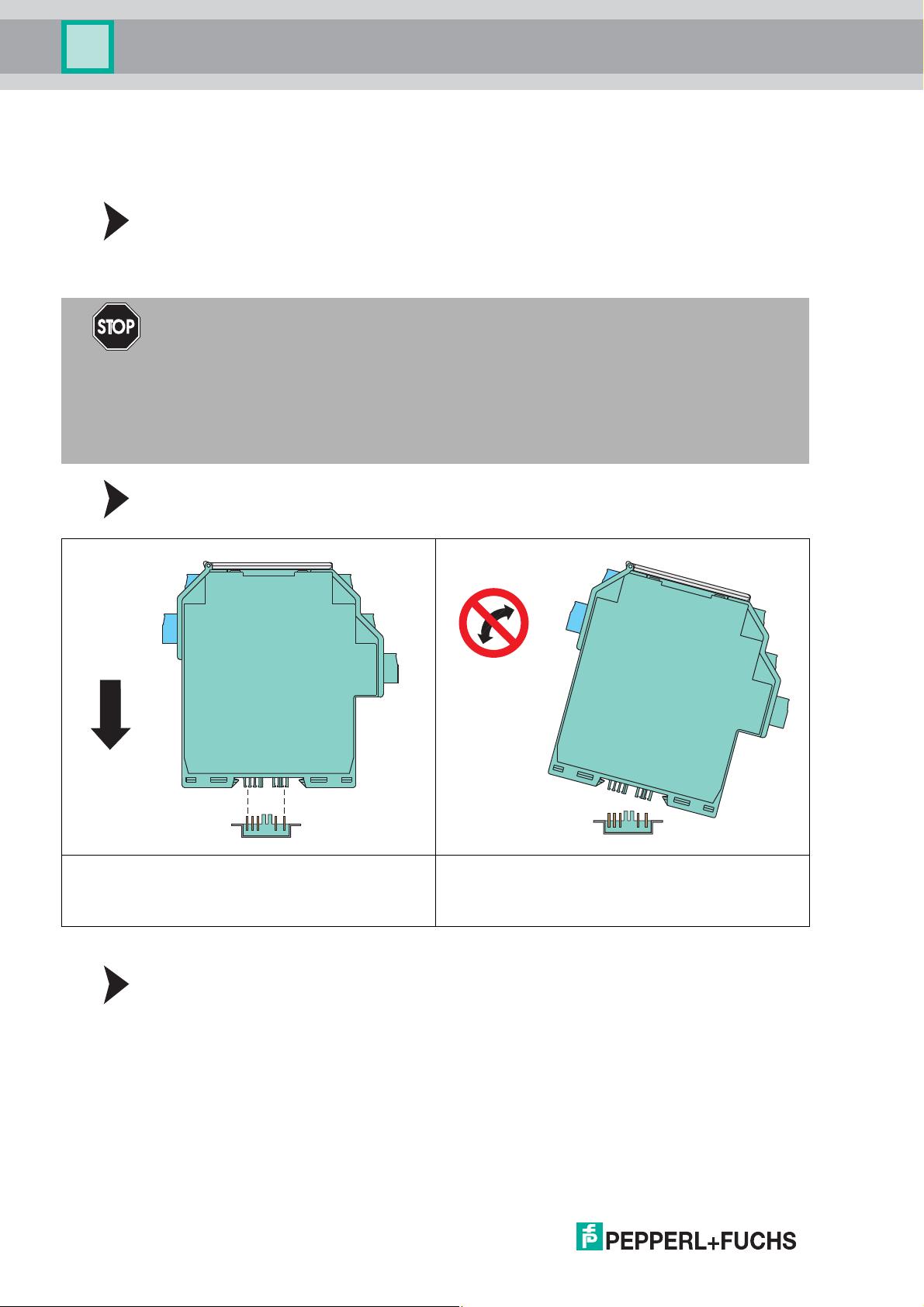
4.3 Mounting
Mounting in a Non-Hazardous Area
Mounting the Device
Snap the device onto the DIN mounting rail from above. See the next figure.
Mounting in Areas that Require Equipment Protection Level Gc
Danger!
Explosion hazard from wrong mounting
The device safety can be impaired by external environmental influences and by mechanical
stress. That can lead to sparking that can ignite a surrounding potentially explosive
atmosphere.
Mount the device in a surrounding enclosure that complies with IEC/EN 60079–0and that is
rated with the degree of protection IP54 according to IEC/EN 60529.
Mounting the Device
Snap the device onto the DIN mounting rail from above. See the figure below.
CORRECT:
Device snapped on vertically from above.
Figure 4.3
INCORRECT:
Device snapped on at an angle from the side.
This may result in damage to the contacts and the
failure of the device.
Mounting Terminal Blocks
Attach the terminal blocks or remove the terminal blocks.
2018-04
18
Page 19
HART Multiplexer System KFD*-HM*-16
Mounting and Installation
4.4 Connecting the Multiplexer Master
Danger!
Explosion hazard from using of non-intrinsically safe circuits in intrinsically safe circuits
Using non-intrinsically safe devices in intrinsically safe circuits suspends the type of
protection. This can ignite the surrounding potentially explosive atmosphere.
Do not use HART multiplexer devices and HART termination boards in intrinsically safe
circuits.
Danger!
Explosion hazard from live wiring of circuits
If you connect or disconnect energized circuits in a potentially explosive atmosphere, sparks
can ignite the surrounding atmosphere.
Only connect or disconnect energized circuits in the absence of a potentially explosive
atmosphere.
KFD2-HMM-16
Termination
Board
1
2
...
23
24
25
26
Power Rail
HART
...
24 V DC
Figure 4.4 Connection of the KFD2-HMM-16 HART multiplexer master
19
20
21
13
14
15
14
17+
18-
1
2
...
GND
TT+
RS-485
KFD0-HMS-16
24 V DC
Zone 2
2018-04
19
Page 20
HART Multiplexer System KFD*-HM*-16
DIN mounting rail
1
2
3
4
5
6
7
8
19
1713 181620142115
KFD0-HMM-16
24 V DC
Mounting and Installation
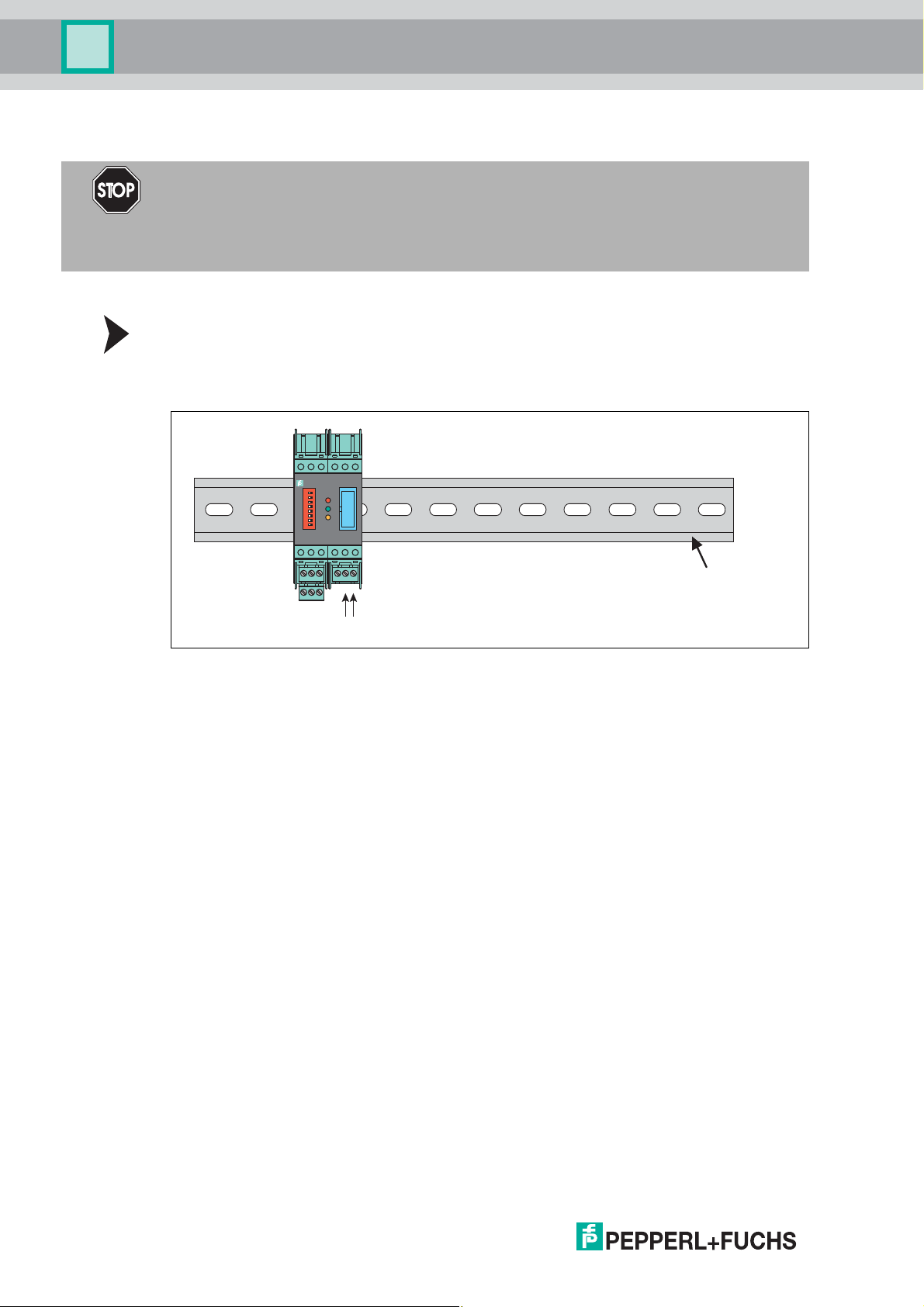
4.4.1 Supplying the Multiplexer Master with Power without Power Rail
Danger!
Danger to life from electric shock
Absent or insufficient insulation can result in electric shock.
Only connect supplies that provide protection against electric shock (e. g. SELV or PELV).
You can use the terminals to supply the multiplexer master with 24 VDC.
Connecting the Multiplexer Master Power Supply
Connect the power supply to terminals 17 and 18.
Observe the tightening torque for the terminal screws. The tightening torque is
0.5 Nm to 0.6 Nm.
Figure 4.5
20
2018-04
Page 21
HART Multiplexer System KFD*-HM*-16
DIN mounting rail
24 V DC
1
2
3
4
5
6
7
8
19
1713 181620142115
KFD0-HMM-16
PWR
1
3
4
6
2
5
13 15
12
9107
14
11
8
Power Rai l
24 V DC
Mounting and Installation
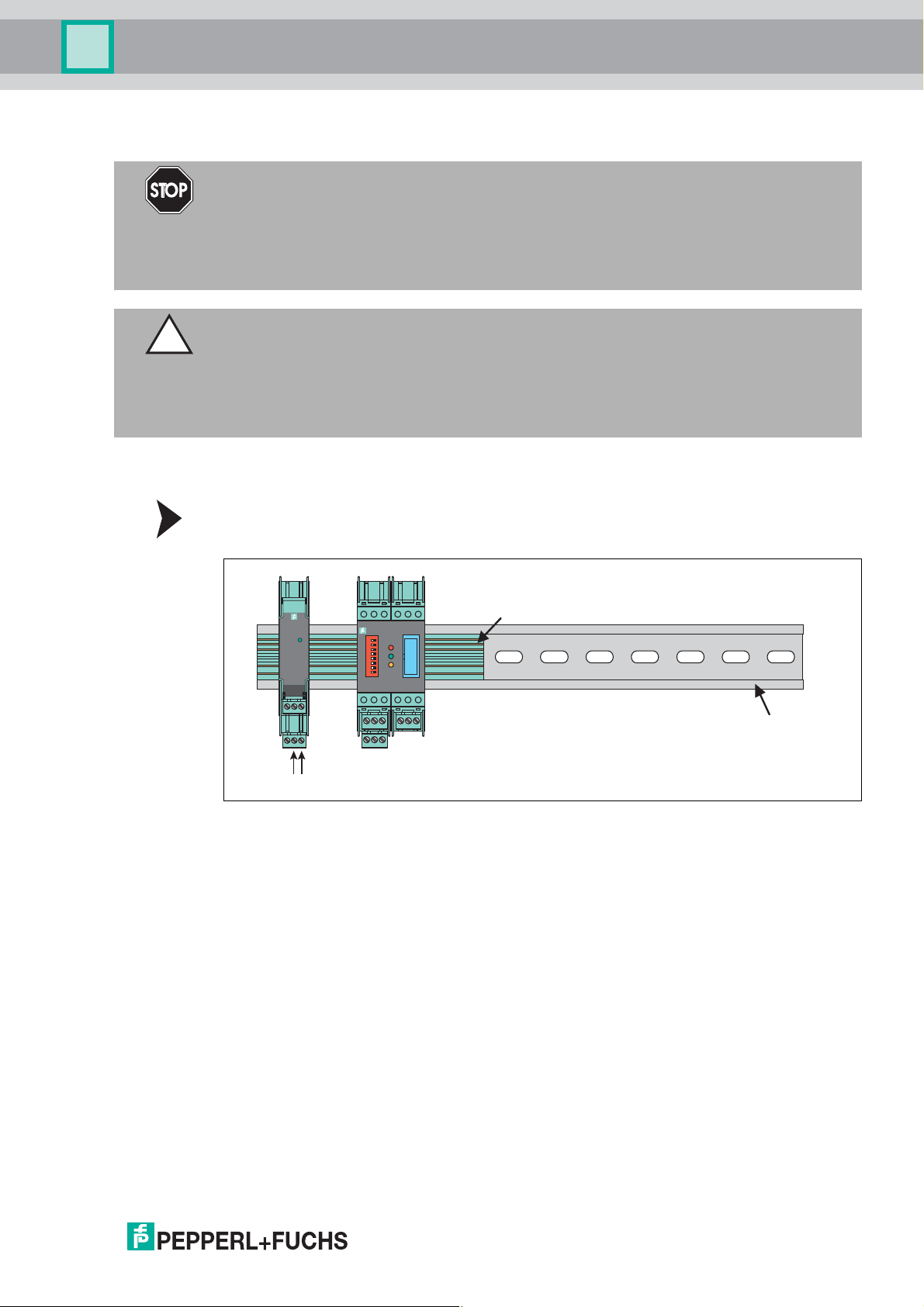
4.4.2 Supplying the Multiplexer Master with Power with Power Rail
Danger!
Danger to life from electric shock
Absent or insufficient insulation can result in electric shock.
Only connect supplies that provide protection against electric shock to power feed modules
(e.g.SELVorPELV).
Caution!
Property damage from use of isolators for Power Rail supply
Using the isolators for Power Rail supply can damage the isolators and make the Power Rail
fail.
Do not supply the Power Rail via isolators.
You can use the Power Rail to supply the multiplexer master with 24 VDC. The supply is
provided using the KFA6-STR-1.24.500 power supply, for example.
Connecting the Multiplexer Master Power Supply
Connect the power supply via Power Rail.
Figure 4.6
2018-04
21
Page 22
HART Multiplexer System KFD*-HM*-16
Mounting and Installation
4.4.3 Connecting the Multiplexer Master to a Computer
The multiplexer master is connected to the computer via an RS-485 interface.
Terminal Designation Meaning
13, 19 Shield Cable shielding
14, 20 RxD/TxD - (RS-485 B–) RS-485 differential signal
15, 21 RxD/TxD + (RS-485 B+)
Table 4.1 Connector assignment for removable terminals
Caution!
Risk of electric shock or property damage due to inadequate grounding
If the cable shield is not connected to the protective earth correctly, this may result in potential
equalization currents. These currents may injure operating personnel or cause property
damage.
Ground the cable shield at only one end of the line. Observe the applicable laws, standards,
and directives for the operating location.
Note!
To connect the multiplexer master and computer, you need an interface converter.
Different interface converters are required depending on the connection on your computer.
We recommend the following converters:
• Interface converter from RS-485 to RS-232: Telebyte model 285, from Telebyte
• Interface converter from RS-485 to RJ45, Com-Server++, from W&T
• Interface converter from RS-485 to USB: I-7561-CR, from ICP
Connecting the Multiplexer Master to a Computer
1. Connect a computer or a process control system to terminals 13, 14, and 15.
Observe the tightening torque for the terminal screws. The tightening torque is
0.5 Nm to 0.6 Nm.
Do not exceed a maximum cable length of 1200 m. Use a shielded, twisted, two-core cable.
2. In the case of long cable lengths and high baud rates, install a terminator at each end of the
RS-485 line. Use terminators of 120 to 220 .
If the RS-485 line ends at the multiplexer master and is not routed to other devices, use the
second RS-485 connection at terminals 20 and 21 to connect a terminator.
If you use an interface converter, install a terminator on the interface converter and an
interface converter at the other end of the line.
In the case of short cable lengths and low baud rates, no terminators are required.
Observe the RS-485 specifications.
3. Connect additional participants to terminals 19, 20, and 21.
Observe the tightening torque for the terminal screws. The tightening torque is
0.5 Nm to 0.6 Nm.
Do not exceed a cable length of 1200 m. Use a shielded, twisted, two-core cable.
22
2018-04
Page 23
HART Multiplexer System KFD*-HM*-16
Mounting and Installation
4.4.4 Connecting the Multiplexer Devices to the Termination Board
The device is connected to the termination board via a 26-pin ribbon cable. The device has a
26-pin IDC socket on the front of the device for this purpose. 16 cables are intended for
the HART signal of the analog measuring circuits of the field devices. The remaining 10 cables
are connected to ground. For the assignment of the IDC socket, see chapter 9.2.
Pepperl+Fuchs provides special termination boards. Various connection options are available
for these termination boards.
Danger!
Explosion hazard from exposed conductors
Exposed conductors of inadequately attached cables can cause sparks that can ignite
the surrounding potentially explosive atmosphere.
When installing the device ensure that the cables are adequately attached.
Connecting Multiplexer Devices, Field Devices, and the Termination Board
Connect the multiplexer device to the termination board via the 26-pin ribbon cable K-HM26.
See chapter 3.4.
4.5 Connecting the Multiplexer Slaves
Danger!
Explosion hazard from using of non-intrinsically safe circuits in intrinsically safe circuits
Using non-intrinsically safe devices in intrinsically safe circuits suspends the type of
protection. This can ignite the surrounding potentially explosive atmosphere.
Do not use HART multiplexer devices and HART termination boards in intrinsically safe
circuits.
Danger!
Explosion hazard from live wiring of circuits
If you connect or disconnect energized circuits in a potentially explosive atmosphere, sparks
can ignite the surrounding atmosphere.
Only connect or disconnect energized circuits in the absence of a potentially explosive
atmosphere.
Danger!
Explosion hazard from exposed conductors
Exposed conductors of inadequately attached cables can cause sparks that can ignite
the surrounding potentially explosive atmosphere.
2018-04
When installing the device ensure that the cables are adequately attached.
23
Page 24
HART Multiplexer System KFD*-HM*-16
KFD0-HMS-16
1
2
23
...
...
1
2
14
...
Termination
Board
KFD2-HMM-16/
KFD0-HMS-16
24
25
26
Zone 2
HART
14-pin ribbon cable
DIN mounting rail
1
2
3
4
5
6
7
8
19
1713 181620142115
KFD0-HMM-16
KFD0-HMS-16
Mounting and Installation
Connecting the Device
1. Connect the terminationboard via the 26-pinribboncable K-HM26.
2. Connect the multiplexer master and additional multiplexer slaves via the 14pin ribbon cable K-HM14.
Figure 4.7 Connection of the KFD0-HMS-16 HART multiplexer slave
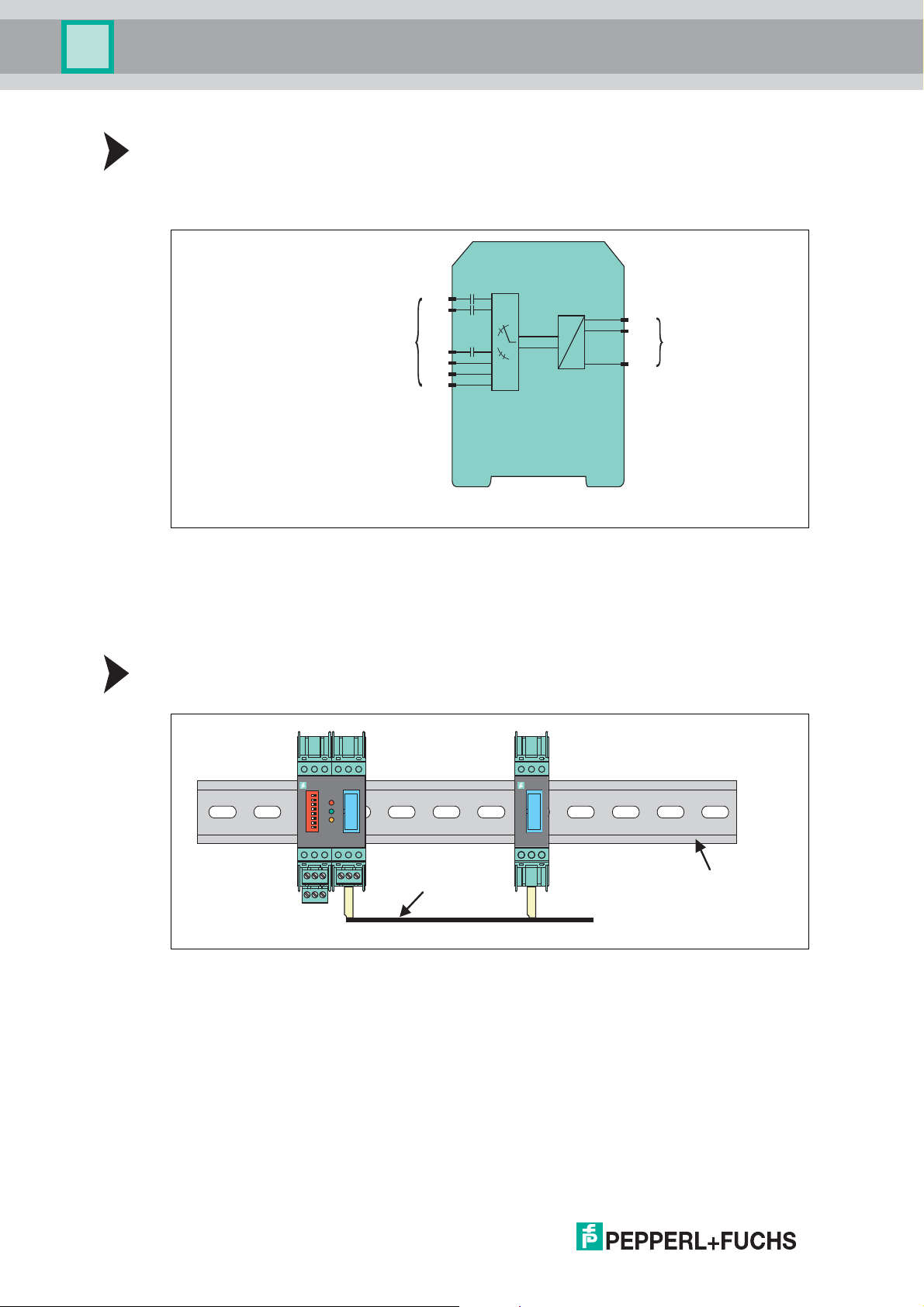
4.5.1 Supplying the Multiplexer Slaves
The multiplexer slaves are supplied with power from the multiplexer master
via the 14-pin ribbon cable.
Connecting the Multiplexer Slave Power Supply
Connect the multiplexer slave to the multiplexer master via the 14-pin ribbon cable K-HM14.
Figure 4.8
24
2018-04
Page 25
HART Multiplexer System KFD*-HM*-16
14-pin ribbon cable
DIN mounting rail
1
2
3
4
5
6
7
8
19
1713 181620142115
KFD0-HMM-16
KFD0-HMS-16
Mounting and Installation
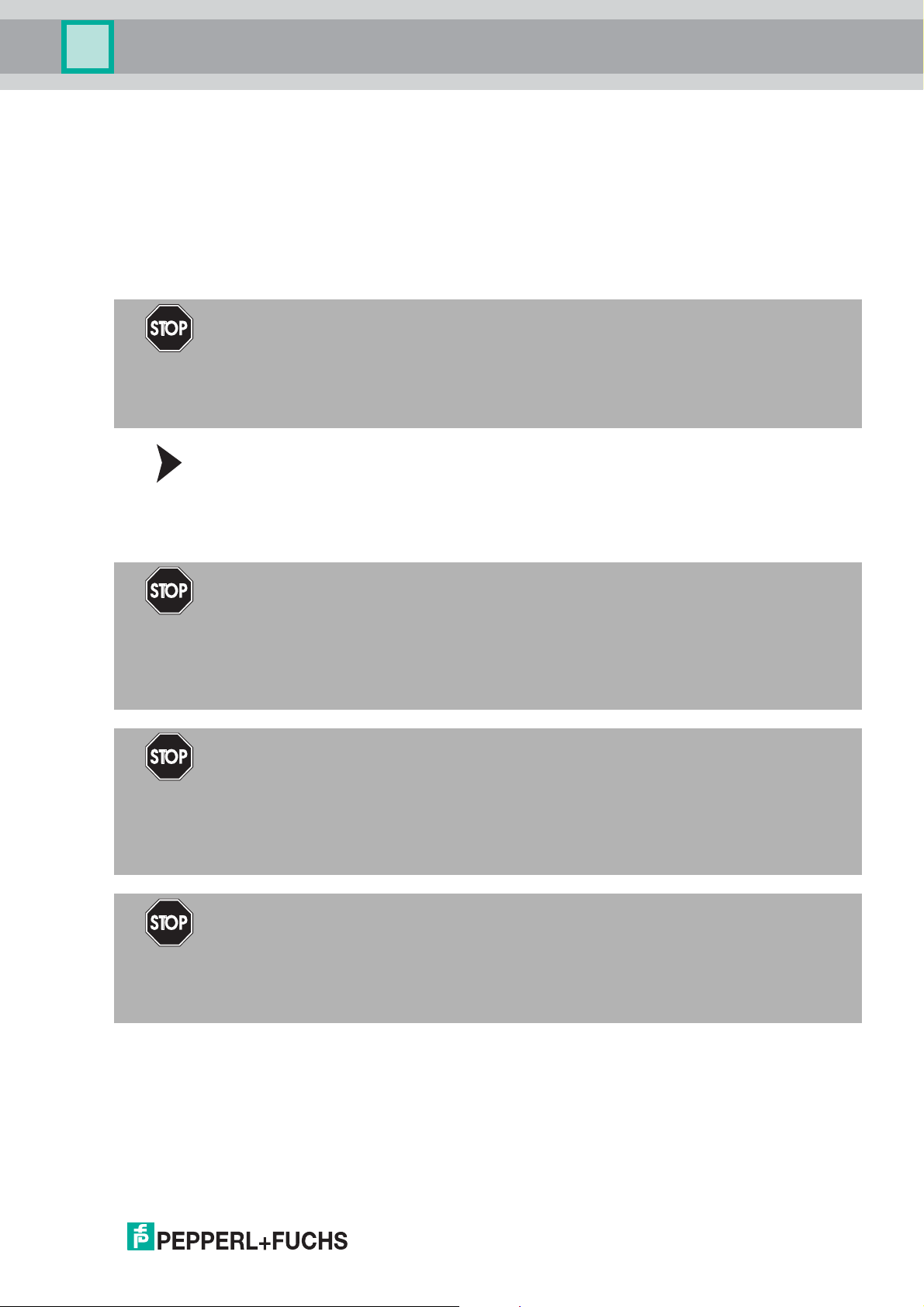
4.5.2 Connection between Multiplexer Master and Multiplexer Slaves
The multiplexer slaves are connected to the multiplexer master via the 14-pin ribbon cable.
Connecting Multiplexer Master and Multiplexer Slaves
Connect the multiplexer master and the multiplexer slaves via the 14-pin ribbon cable
K-HM14.
Figure 4.9
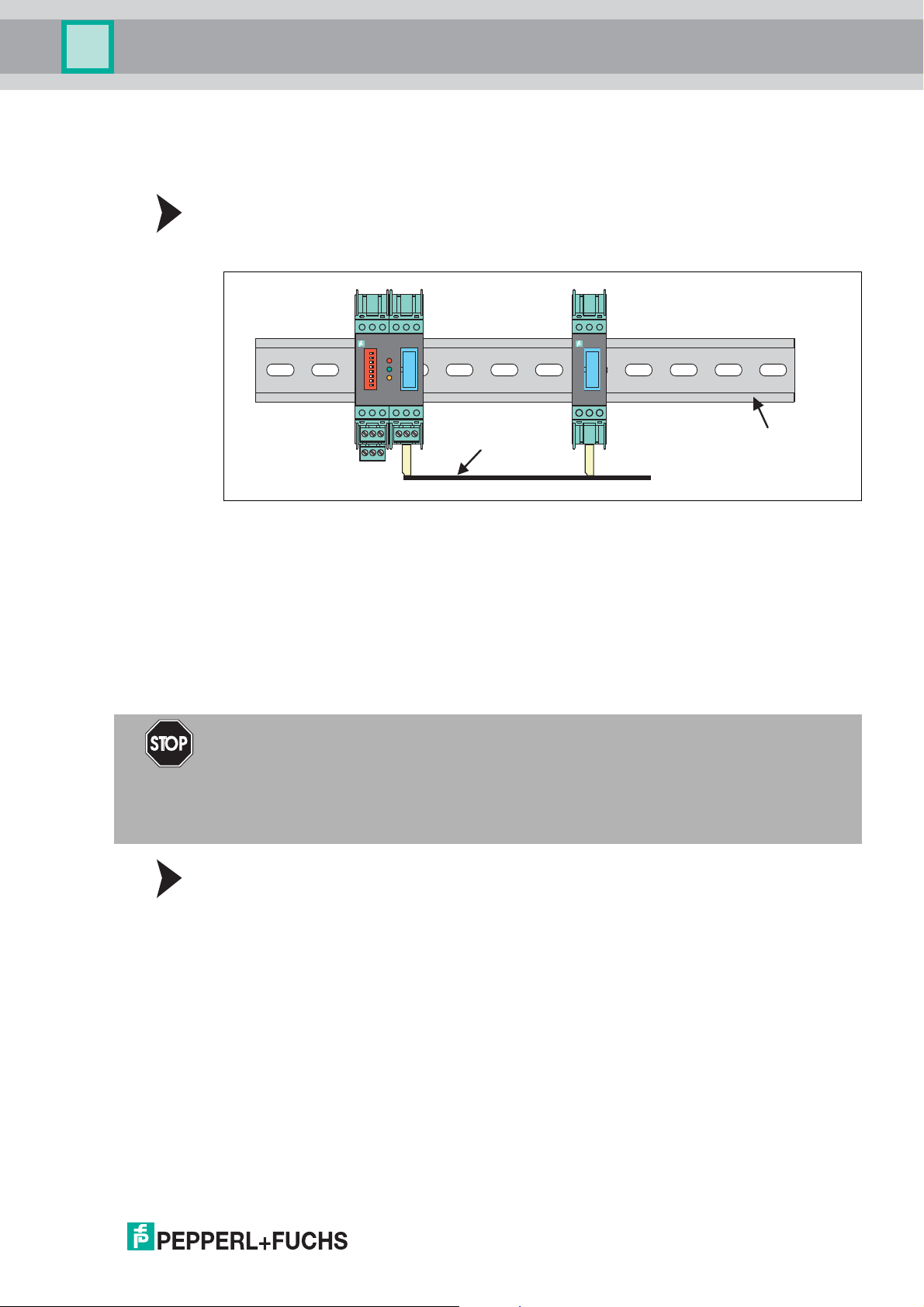
4.5.3 Connecting the Multiplexer Devices to the Termination Board
The device is connected to the termination board via a 26-pin ribbon cable. The device has a
26-pin IDC socket on the front of the device for this purpose. 16 cables are intended for
the HART signal of the analog measuring circuits of the field devices. The remaining 10 cables
are connected to ground. For the assignment of the IDC socket, see chapter 9.2.
Pepperl+Fuchs provides special termination boards. Various connection options are available
for these termination boards.
Danger!
Explosion hazard from exposed conductors
Exposed conductors of inadequately attached cables can cause sparks that can ignite
the surrounding potentially explosive atmosphere.
When installing the device ensure that the cables are adequately attached.
Connecting Multiplexer Devices, Field Devices, and the Termination Board
Connect the multiplexer device to the termination board via the 26-pin ribbon cable K-HM26.
See chapter 3.4.
2018-04
25
Page 26

HART Multiplexer System KFD*-HM*-16
Mounting and Installation
4.6 Connecting the Termination Board
Danger!
Explosion hazard from using of non-intrinsically safe circuits in intrinsically safe circuits
Using non-intrinsically safe devices in intrinsically safe circuits suspends the type of
protection. This can ignite the surrounding potentially explosive atmosphere.
Do not use HART multiplexer devices and HART termination boards in intrinsically safe
circuits.
Danger!
Explosion hazard from live wiring of circuits
If you connect or disconnect energized circuits in a potentially explosive atmosphere, sparks
can ignite the surrounding atmosphere.
Only connect or disconnect energized circuits in the absence of a potentially explosive
atmosphere.
Danger!
Danger to life from electric shock
Absent or insufficient insulation can result in electric shock.
Only connect supplies that provide protection against electric shock to power feed modules
(e.g.SELVorPELV).
Danger!
Danger to life from electric shock
Absent or insufficient insulation can result in electric shock.
• Maintain sufficient distance between the connection lines, terminals, housing, and
the environment.
• Insulate connection lines, terminals, and the housing from the environment.
Danger!
Danger to life from incorrect installation
Incorrect installation of cables and connection lines can compromise the function and
the electrical safety of the device.
• Observe the permissible core cross section of the conductor.
• When using stranded conductors, crimp wire end ferrules on the conductor ends.
• Use only one conductor per terminal.
• When installing the conductors the insulation must reach up to the terminal.
• Observe the tightening torque of the terminal screws.
26
2018-04
Page 27
HART Multiplexer System KFD*-HM*-16
Mounting and Installation
4.6.1 Connecting Field Devices to the Termination Board
Pepperl+Fuchs provides special termination boards. Various connection options are available
for these termination boards. See the manual "K-System – Isolators and Termination Boards."
Connecting the Termination Board and Field Devices
1. Connect the HART-compatible field devices to the termination board using screw terminals
or spring terminals. See chapter 3.4.1 and 3.4.2.
Observe the tightening torque for the terminal screws. The tightening torque is
0.5 Nm to 0.6 Nm.
or
2. Control units are mounted on the termination board. Connect the field devices to the
control unit using screw terminals or spring terminals. See chapter 3.4.3.
Observe the tightening torque for the terminal screws. The tightening torque is
0.5 Nm to 0.6 Nm.
4.6.2 Connecting the Process Control System to the Termination Board
Pepperl+Fuchs provides special termination boards. Various connection options are available
for these termination boards.
Connecting the Termination Board and Process Control System
1. Connect the process control system to the termination board using screw terminals
or spring terminals. See chapter 3.4.1.
Observe the tightening torque for the terminal screws. The tightening torque is
0.5 Nm to 0.6 Nm.
or
2. Connect the process control system to the termination board via a manufacturer-specific
system connector. See chapter 3.4.2 and 3.4.3.
4.7 Information Regarding Electromagnetic Compatibility
The device is intended for use in electrically conductive and grounded switch cabinets.
Shielding Cables
1. Shield cables that are leaded into the switch cabinet.
2. Connect the switch cabinet and shield directly in the cable gland.
3. Lead unshielded cables (e. g. supply lines) into the switch cabinet via filter.
2018-04
27
Page 28

HART Multiplexer System KFD*-HM*-16
Commissioning
5 Commissioning
Checklist for Commissioning
The commissioning of the multiplexer master is summarized in the following checklist.
The steps required for commissioning the multiplexer master refer to the chapters where
the respective procedure is described.
1. Installation of field devices
2. Selection and connection of the termination boards, see chapter 3.4
3. Selection and connection of the control units
4. Connection of the process control system
5. Connection of the multiplexer master, see chapter 4.4
6. Connection of the maintenance station.
If necessary, use interface converters, see chapter 4.4.3.
Observe the polarity of the RS-485 connection, see chapter 4.4.3.
Specify the RS-485 address and the baud rate.
7. Wait for the switch-on process, see chapter 5.2.4.
8. Perform parameterization, see chapter 5.2.5.
9. Specify the multiplexer devices used in the module table, see chapter 7.1.2.
10. Build signal loops, see chapter 7.1.5.
11. If desired, activate the scan function, see chapter 7.1.6.
5.1 Data Access to the Connected Field Devices
The operating tool used determines how data on the connected field devices is accessed.
The field devices are generally found in a project tree beneath the multiplexer slaves.
The multiplexer master integrates the slave unit with slave address 0. Device data,
device parameters, and device diagnoses can be accessed via the project tree.
For the structure of a project tree, see chapter 6.8.
The data, parameter, and diagnostic windows display the data of the underlying
HART commands that differ according to the field device. Only universal commands and
common practice commands have the same function for all devices. The information about the
devices themselves, the process values, and some diagnostic information can thus be
represented in a uniform manner.
5.2 Configuration of the Multiplexer Master
5.2.1 Connection to the Maintenance Station or to the
Process Control System
28
The connection to the maintenance station or to the process control system is via a multidropenabled RS-485 interface, see chapter 4.4.3. The baud rate for this interface can be set via the
DIP switch. The device address for communication via RS-485 is also set via the DIP switch.
When setting the address, make sure that no address is assigned more than once, as
otherwise this may lead to communication faults and even communication failure. The
baud rate set must match that of the maintenance station.
2018-04
Page 29

HART Multiplexer System KFD*-HM*-16
Commissioning
5.2.2 DIP Switch Settings
Danger!
Explosion hazard from sparking when using operating elements
Using operating elements in a potentially explosive atmosphere can cause sparks that can
ignite the surrounding atmosphere.
Only use operating elements (e. g., switch, slider, button, etc.) in the absence of a potentially
explosive atmosphere.
The device is equipped with 8 DIP switches on the front.
DIP switch 1 is used for device testing by the manufacturer and must therefore always be in
the off position.
DIP switch 1 Meaning
Position Off Normal state
Table 5.1
DIP switches 2 and 3 determine the baud rate of the RS-485 interface.
DIP switch 2 3 Meaning
Position Off Off 9600 baud
Off On 19200 baud
On Off 38400 baud
On On 57600 baud
Table 5.2
DIP switches 4 to 8 define the RS-485 address. A value assigned to each of the DIP switches.
The address is calculated from the sum of the values.
DIP switch 4 5 6 7 8 Meaning
Position On Off Off Off Off Value 16
Off On Off Off Off Value 8
Off Off On Off Off Value 4
Off Off Off On Off Value 2
Off Off Off Off On Value 1
Example Off On On Off On Address=8+4+1=13
Table 5.3
2018-04
Note!
Briefly disconnect the device from the power supply to apply the values set using
the DIP switches.
29
Page 30

HART Multiplexer System KFD*-HM*-16
Commissioning
Factory Setting
DIP switch 1 2 3 4 5 6 7 8 Meaning
Position Off Off Off Off Off Off Off Off Manufacturer test disabled,
Table 5.4
Note!
In the factory setting, the address 0 is set. Ensure that you do not assign any addresses more
than once.
5.2.3 LED Indication
The device is equipped with three LEDs which are located on the front of the housing.
The LEDs have the following meanings:
Color Meaning
Red Fault indication, detected during the initialization process
Green Operating indication
Orange HART communication with a field device
Table 5.5
baud rate 9600 baud
RS-485 address 0
LED indication during the initialization process
Color Status Meaning
Red Off Initialization process
Green Flashes
Orange Off
Table 5.6
LED indication during the scanning process
Color Status Meaning
Red Off Scanning process
Green Lit
Orange Flashes
Table 5.7
Note!
For further information about the scanning process, see chapter 5.2.4.
Faulty LED indication during commissioning
Color Status Meaning
Red Flashes If all three LEDs flash one after the other, DIP switch 1 (test) is in
Green Flashes
Orange Flashes
Table 5.8
the on position. Turn the switch to off and repeat commissioning.
30
2018-04
Page 31

HART Multiplexer System KFD*-HM*-16
Commissioning
5.2.4 Switch-On Behavior
When the power supply has been switched on, the multiplexer master performs an
initialization process with a self-test. The process is indicated by a flashing green LED.
Any faults detected are indicated by a red LED. The multiplexer devices defined in
the multiplexer table (command 157) are then scanned for any available HART-compatible
field devices. This process is indicated by the flashing orange LED.
Once the multiplexer master has completed the scan process, a list of the field devices
connected is saved in the device.
Note!
If a field device is connected to the multiplexer device during operation, a scan must be
performed afterwards so that the field device can be addressed via HART. This scanning
process is triggered automatically when the multiplexer device is switched on,
see chapter 7.1.5. The process can also be started manually in the maintenance station,
see chapter 7.2.1. The duration of the scanning process is dependent
• on the number of connected multiplexer slaves,
• on the number of connected HART-compatible field devices,
• on the loop search type, see chapter 9.1, command 153,
• on the number of message repeats in the case of a fault, or
• on whether the query has been answered.
The factory setting for the number of message repeats is set to 2. The search duration is
between approximately 30 seconds and several minutes in the case of maximum
configuration. On completion of this phase, the orange LED goes out. Volatile data is set to its
default setting. Data stored in non-volatile memory is retained.
Note!
Scanning Process with Several Interconnected Multiplexer Devices
If several multiplexer devices are interconnected through a shared RS-485 line and
a field device is replaced between the multiplexer devices, a scan must be performed
on both multiplexer devices. Otherwise, no communication with the affected field device is
possible.
2018-04
31
Page 32

HART Multiplexer System KFD*-HM*-16
Commissioning
5.2.5 Device Parameters, Parameterization
Caution!
Potential device malfunction from change of device function
Changes in the device function can lead to device malfunction. The function of the device
is no longer guaranteed.
Before transferring the new device function, make sure that the changed device function
does not cause a danger to the device and the plant.
For the identification and parameterization of the multiplexer master, just like other
HART field devices, the multiplexer master contains certain parameters that are saved in
the non-volatile memory. The following list shows these parameters and how the
parameterization must be performed.
• Unique device identification, see commands 0 and 11
The device identification provides information about the device (type, type ID,
serial number, revision numbers) and the manufacturer and cannot be changed.
• Message, see commands 12 and 17
Under this parameter, any text of up to 32 characters can be stored in the device.
• Tag, description, and date, see commands 13 and 18
A tag (8 characters), a measuring point description (16 characters), and a date can be
stored under these parameters.
• Number of preambles in message responses, see command 59
This parameter is used to define the number of preambles inserted in the message
responses. The default setting is 4, the adjustment range is 2 to 20.
• Number of message repeats, see commands 144 and 145
The number of message repeats can be set separately for repeats in the event of
communication faults and in the event of response code Busy. The adjustment range is
0 to 11 repeats in each case. In the event of communication faults, the default setting is 2.
For response code Busy, the default setting is 0.
• Scan command, see chapter 7.1.7 and commands 146 and 147
Of the existing scan parameters, only the scan command is stored in non-volatile memory.
The command indicates which HART command (1, 2, or 3) is to be a scan command to
the field devices.
• Master type (primary or secondary master), see command 151
This sets the priority for access to the HART field device. A primary master always initiates
a connection to a field device. A secondary master initiates a connection to a field device
only if the primary master does not access the field device. The default setting for
the multiplexer master is primary master. A typical example of a secondary master is a
handheld.
• Loop search type, see command 153
The multiplexer master currently does not support multidrop with HART, i. e., only one
HART field device is connected to each HART channel. During construction of the
signal loop (scanning process, see chapter 7.1.5), the connected field devices are either
always searched for polling address 0 (single analog) or for polling addresses 0 to 15
in preparation for multidrop operation. In multidrop operation, the first polling address
found is addressed (single unknown).
• Module table, see chapter 7.1.2 and command 157
32
This document includes a list of commands. See chapter 9.1.
2018-04
Page 33

HART Multiplexer System KFD*-HM*-16
Configuration
6Configuration
Caution!
Potential device malfunction from change of device function
Changes in the device function can lead to device malfunction. The function of the device
is no longer guaranteed.
Before transferring the new device function, make sure that the changed device function
does not cause a danger to the device and the plant.
Note!
The steps are described using the FDT framework program PACTwa re 4 .1 as an example.
6.1 Introduction to PACTware Operating Software
FDT Concept
The FDT concept (FDT – Field Device Tool) created a standard that can be used to integrate
devices in various user interfaces (framework applications such as PACTware ).
The FDT concept enables open and continuous device operation from the control level to
the field, regardless of the bus systems used. The FDT concept specifies the data exchange
between the device-specific driver and the framework application. Every communicating
device has a device-specific driver (DTM) that is integrated in the framework application.
PACTwareTM Operating Software
PACTw ar e (PACTwa re – Process Automation Configuration Tool) is
a manufacturer-independent operating software for devices. In the past, it was often necessary
to use multiple manufacturer-specific programs to be able to operate different devices.
PACTw ar e enables you to operate any number of devices with just this software. PACTw ar e is
not only a configuration tool, it also offers an interface to HART-compatible field devices as
well as to bus systems such as PROFIBUS, MODBUS, and ControlNet. PACTwa re offers
many features that allow users to simplify the plant documentation, to create trend curves, and
to monitor signals using HART data.
Device and Communication DTM
The DTM (DTM – Device Type Manager) contains all the data and functions of a device.
Every DTM contains its own user interface optimized for the device. The device and
communication DTMs can be integrated in any FDT frame application, such as PAC Tware .
The DTM offers almost no restriction with regard to display and user guidance. This means that
all available device functions can be operated according to the user's needs. Operation is
supported by graphics. The DTM technology enables consistent operation of a device in all
FDT systems.
Pepperl+Fuchs generates DTMs for HART-compatible devices by converting the
device description (DD) of these devices for use with PACTwar e.
2018-04
33
Page 34

HART Multiplexer System KFD*-HM*-16
Configuration
Essentially, there are two different types of DTM:
• Device DTMs
Device DTMs are DTMs for configuring field devices such as transmitter power supplies,
signal converters, and trip amplifiers.
• Communication DTMs
Communication DTMs are required for communication with a device via a point-to-point
connection or via any network structures. The communication DTMs are available for
various interfaces, such as an RS-232 interface or a USB interface.
6.2 Software Components
To configure the device with a user program, you need the following software components:
• Microsoft
• PAC Twa re 4. 1 or higher
In accordance with FDT Specification 1.2, PAC Twa re is used as a framework application
for DTMs supplied by manufacturers of the field devices as configuration software.
• HART Multiplexer DTM
The DTM collection comprises all device DTMs required for the parameterization of
multiplexer devices. The DTMs are used to establish communication with the field devices
using communication protocols such as the HART protocol or PROFIBUS protocol.
• DTM HART Comm
This package contains the HART communication DTM, which is necessary for
communication between the host and the HART multiplexer DTM.
• DTMs of the field devices
The manufacturers of field devices provide specific DTMs which allow access to all
functions of the respective devices and therefore allow detailed parameterization.
For further information, please contact the manufacturer of the field devices used.
• Ge n e r i c H A R T D T M
The Generic HART DTM provides the basic HART functionalities of the field devices.
If no matching device DTM is available, the Generic HART DTM is used for
basic parameterization. Therefore, we recommend that this DTM is always available.
®
.NET Framework 3.5 or higher
DTM HART Comm HART Multiplexer DTM
KFD0-HMM-16
1
2
3
4
5
6
7
8
19
HART multiplexer system
Master Slave Master Slave
Host
Computer-based
maintenance station
or process control system
HART communication 1 HART communication 2
1713 181620142115
Field device DTMs
Field devices
Figure 6.1 Software components
Note!
The latest software components can be found online at www.pepperl-fuchs.com in the
product selector under Products > Software.
2018-04
34
Page 35

HART Multiplexer System KFD*-HM*-16
Configuration
Installing Software Components
1. Install Microsoft® .NET Framework.
2. Install PAC Twa re .
3. Install the HART multiplexer DTM.
4. Install the DTM HART Comm.
5. Install the field device-specific DTMs from the manufacturer of the field devices.
6. Install the DTM Generic HART if necessary.
Note!
The cross-device properties of the software are described in the manual "Installation and
Configuration Device Type Manager (DTM)." You can download this manual free of charge
from our website www.pepperl-fuchs.com in the product selector under
Products > Software > PACTware > Product list > PACTware 4.1 > Documents.
The following section describes only the device-specific settings for the
HART multiplexer master KFD2-HMM-16.
2018-04
35
Page 36

HART Multiplexer System KFD*-HM*-16
Configuration
6.3 PACTware Main Window
The main window is divided into the project window and the editing window.
Project window In the project window, you build the current project tree of your system by adding
the various components. In the project window, select the device you want to edit,
monitor, diagnose, or simulate. The selected object is highlighted in a different color.
Editing window In the editing window, various windows required for editing your system are opened.
In the first processing step, the selection window with the drivers and devices or
the device catalog for the structure of the system is shown.
For the configuration and parameterization, the corresponding windows for the drivers
and devices are opened in the editing window.
For subsequent operation, the menus for diagnosis, measured value, trend, or
simulation are opened in the editing window. In addition, the communication monitor
for the communication protocol can be opened.
Menu bar The menu bar contains the following drop-down menus:
• File: Here you can create a new project, save the current project, or load an
existing project.
• Edit: Contains the copy, cut, and paste functions.
• View: Here you can display or hide various symbol and status bars, as well as
thedevicecatalog, fault monitoring, etc.
• Project: Contains the basic project functions, such as loading device(s), writing to
device(s), reading the device status.
• Device: Contains the functions for editing the device data of the device currently
selected in the project tree. Here you can also establish or disconnect the
connection to the selected device.
• Extras: Here you can manage the device catalog, the users, the options, and
the add-ins.
• Window: Here you can open the various current view windows.
• Help: The PACTwa re help is called up.
Command bar The command bar is located below the menu bar and contains buttons for all important
functions for adding, removing, and editing components within the project.
You can also read the device status, edit the device data, and establish or disconnect
the connection to the system.
36
2018-04
Page 37

HART Multiplexer System KFD*-HM*-16
Project window Editing window
Command bar
Menu bar
Configuration
Figure 6.2 PAC Twa re main window
Note!
Additional information on PAC Twa re can be found in the manual "Installation and
Configuration Device Type Manager (DTM)."
2018-04
37
Page 38

HART Multiplexer System KFD*-HM*-16
Configuration
6.4 Connecting with the Device
Connecting the Computer to the Device
1. Mount the device. See chapter 4.
2. Connect the device to the power supply.
3. Connect the computer and the device via an interface converter. See chapter 4.4.3.
4. Start PAC Twar e as described in the manual "Installation and Configuration
Device Type Manager (DTM)".
The PACTwa re main window is displayed. See chapter 6.3.
Enabling Memory-Optimized Operation
In combination with the DTMs for the multiplexer master, we recommend enabling
the Memory-optimized operation option.
1. Open the menu Extras > Options.
2. Enable Use memory-optimized project management.
3. Confirm your selection with OK.
You have enabled the memory-optimized operation.
38
2018-04
Page 39

HART Multiplexer System KFD*-HM*-16
Configuration
6.5 Inserting the Communication DTM
In a PAC Twar e project, the multiplexer master can only be addressed via the
communication DTM HART communication. Information detailing how to create and edit a
project can be found in the "Installation and Configuration Device Type Manager (DTM)"
manual.
If there is no communication DTM in your project, add a communication DTM from
thedevicecatalog.
Note!
Do not use the communication DTM HART Driver FDT. This communication DTM is
an obsolete IDL-DTM.
Adding Communication DTMs
1. In the project window, select HOST PC using the right mouse button.
2. In the context menu, select Add device.
3. Select the DTM HART communication from the list.
4. Confirm your selection with OK.
The communication DTM is included in the project. In the project tree, the
communication DTM bears the name of the COM port on which the device is
physically connected with the computer (e. g. COM8).
Figure 6.3 Device catalog
2018-04
39
Page 40

HART Multiplexer System KFD*-HM*-16
Configuration
Setting Parameters
1. In the project window, double-click the communication DTM. It bears the name of the
COM port on which the device is physically connected with the computer (e. g. COM8).
2. Close the Parameters window by clicking the OK button.
If you have made changes to parameters, these changes will be saved.
The following parameters are adjustable:
• Communication interface:
Select the option HART multiplexer as the interface.
• Serial interface:
Select the COM port to which the multiplexer master is connected.
• Baud rate:
Select the baud rate according to the settings of the DIP switches on
the multiplexer master, see chapter 5.2.2.
• RTS control:
Depending on the type of interface converter used, switching the request-to-send control
on or off may be necessary to switch cleanly between receive and transmit mode.
• HART protocol:
Master: 2 HART masters may be connected to a HART signal loop, whereby
the parameterization must differentiate between the primary master and the
secondary master. This setting is defined here.
Preamble: In accordance with the HART standard, a corresponding number of
FF characters must be sent in advance as a preamble. The number of characters is
defined here.
Number of communication retries: Number of repeated attempts to make contact in
the event of an fault.
• Address scan: start address and end address:
Here you can set the address range in which the HART communication DTM should
search for the multiplexer devices connected to the RS-485 interface.
• Communication timeout:
Here you can set how long the HART communication DTM should search for
the multiplexer devices connected to the RS-485 interface.
40
2018-04
Page 41

HART Multiplexer System KFD*-HM*-16
Configuration
Figure 6.4 HART communication parameter window
2018-04
41
Page 42

HART Multiplexer System KFD*-HM*-16
Configuration
6.6 Inserting the Multiplexer Devices
The connected multiplexer devices can be scanned in the communication DTM
via the Additional functions > Scanlist function.
Updating the Scan List
1. In the project window, right-click to select the HART communication DTM (e. g. COM8).
2. In the context menu select Additional functions.
3. Select Scanlist.
4. Start the scan by clicking Update.
The scan list is updated and displayed.
Figure 6.5 HART communication window, scan list
42
2018-04
Page 43

HART Multiplexer System KFD*-HM*-16
Configuration
The multiplexer devices must be added to the project manually.
Inserting Multiplexer Devices via Device Catalog
1. Open the device catalog by clicking View > Device catalog
2. Use drag-and-drop to move the KFD2-HMM-16 DTM from the device catalog to
the HART communication DTM (e. g. COM8) in the project tree.
The KFD2-HMM-16 DTM is added to the project.
Inserting Multiplexer Devices via Context Menu
1. In the project window, right-click to select the HART communication DTM (e. g. COM8).
2. In the context menu, select Add device.
3. Select the KFD2-HMM-16 DTM from the list and confirm by clicking OK.
The KFD2-HMM-16 DTM is added to the project.
Note!
To establish the connection to a device in the project tree or to disconnect the connection,
right-click to select the corresponding device in the project window. In the context menu,
select Connect or Disconnect.
Alternatively, you can select the device in the project window and click the corresponding field
in the command bar.
2018-04
43
Page 44

HART Multiplexer System KFD*-HM*-16
Configuration
6.7 Displaying Device Information and Setting Parameters
6.7.1 Loading Device Data
Loading Data and Establishing a Connection
1. In the project window, right-click to select multiplexer master KFD2-HMM-16.
2. Select Load from device in the context menu.
3. If no connection has been established previously, a window opens and you are asked
whether you want to establish the connection to the device. Select Ye s .
The connection to the multiplexer master is established and the device data
can be read.
Figure 6.6 Load data from device
44
2018-04
Page 45

HART Multiplexer System KFD*-HM*-16
Configuration
6.7.2 Device Information
General information about the device is displayed in the Ge n e r a l menu:
Displaying Device Information
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Configuration > General menu.
The Ge n e r a l window is displayed.
3. Click Apply to confirm your selection.
4. Select Revert to reset your selection.
Information
General, unchangeable information about the device is displayed in the Information section:
• Manufacturer: Manufacturer of the multiplexer device (Pepperl+Fuchs).
• Device ID: Type designation of the device.
• Device type ID: This number identifies the type of device and is unique depending on
the manufacturer. Together with the manufacturer ID, the device type ID can be used
to identify the device type uniquely.
• Serial number: The serial number of the device.
• Hardware revision: Hardware revision of the multiplexer master.
• Software revision: Software revision of the multiplexer master.
• Device revision: The revision of the devices supported.
• Date: The date on which the device parameters were last changed.
• Configuration changed: Indicates whether a parameter has been changed in
the configuration of the device, see chapter 7.2.4.
Identification
Identification information is displayed in the Identification section. This information can be
changed and saved by the user.
• Ta g : Tag for the identification of the multiplexer master.
• Descriptor: Description for the multiplexer master.
• Message: Communication without any special function which can be used freely by
the user (e. g. for identification).
2018-04
45
Page 46

HART Multiplexer System KFD*-HM*-16
Configuration
Figure 6.7 General window (device information)
46
2018-04
Page 47

HART Multiplexer System KFD*-HM*-16
Configuration
6.7.3 Parameterizing Communication
Displaying Communication Parameters
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Configuration > Communication menu.
The Communication window is displayed.
3. Click Apply to confirm your selection.
4. Select Revert to reset your selection.
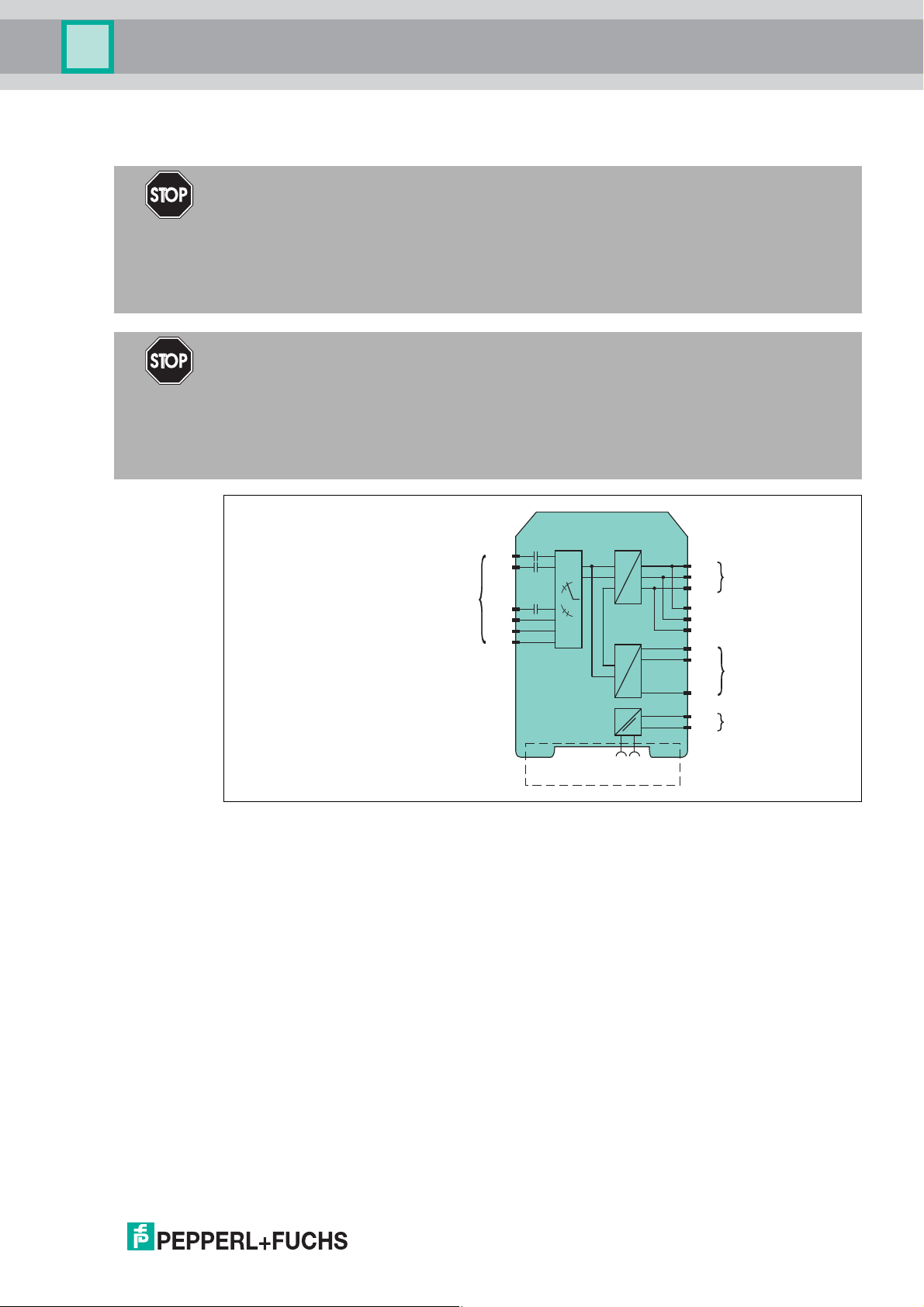
The communication parameters between the host, HART multiplexer system, and field device
are displayed and set in the Communication menu:
HART communication 1 HART communication 2
Data request Cyclic data request
Cache data
(Command caching)
KFD0-HMM-16
1
2
3
4
5
6
7
8
1713 181620142115
19
Host
Computer-based
maintenance station
or process control system
HART multiplexer system
Field devices
Figure 6.8
Communication with the Multiplexer Master
In this case, the communication between the host and the HART multiplexer system
(HART communication 1) is described.
The Communication to host HART master (as field device) section displays the following
information about the device:
• Address: The RS-485 address of the multiplexer master is displayed here.
• Unique identifier: The unique, non-variable long address of the multiplexer master.
• HARTrevision: HART revision under which the multiplexer master is operated.
• Minimum number of preambles: Minimum number of preambles.
2018-04
47
Page 48

HART Multiplexer System KFD*-HM*-16
Configuration
Communication with the Field Devices
In this case, the communication between the HART multiplexer system and the field devices
(HART communication 2) is described.
The Communication to field devices (as HART master) section displays the following
information. This information can be changed and saved by the user.
• Master type: 2 HART masters may be connected to a HART signal loop, whereby
the parameterization must differentiate between the primary master and the
secondary master. The setting at this point indicates whether the multiplexer master
addresses the field devices as primary or secondary HART master.
• Retries on "Busy": Number of repeat attempts to establish communication
with the field device if the field device reports Busy.
• Retries on error: Number of repeat attempts to establish communication
with the field device if a fault occurs.
• Loop scan address range: This defines the address range in which the field devices on
the individual signal loops are searched for, see chapter 6.7.4:
• Scan address 0 only: The multiplexer master uses only address 0 to search for
connected devices.
• Scan addresses 0 to 15: The multiplexer master searches for all
polling addresses between 0 and 15 and identifies the first device to respond.
Figure 6.9 Communication window
48
2018-04
Page 49

HART Multiplexer System KFD*-HM*-16
Configuration
6.7.4 Command Caching Function
Cyclical Data Retrieval
With cyclical data retrieval, the HART multiplexer master periodically retrieves data from the
connected field devices and stores the data in its internal memory.
If the process control system queries the data of the field devices, this data can be forwarded
more quickly. The data is no longer read directly from the field device. Instead, it is read
directly from the memory of the multiplexer master. See chapter 6.7.3.
Displaying the Command Caching Function Settings
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Configuration > Command caching menu.
The Command caching window is displayed.
3. Click Apply to confirm your selection.
4. Select Revert to reset your selection.
The command parameters for the multiplexer master are displayed and set in the
Command caching menu:
• Mode: This switches the Command caching function on or off.
• Disabled: The function is switched off.
• Default caching: The function is switched on. This is the default setting.
The commands selected are cached, see below.
• HARTcommand: Here you can use a drop-down menu to select which values are to
be read out from the field devices:
• Command1-ReadPrimaryVariable: Only the primary variable of the field device
is read out.
• Command2-ReadLoopCurrentandPercentOfRange: The current value in mA
is read out.
• Command3-ReadDynamicVariablesandLoopCurrent: All variables of
the field device are read out.
2018-04
49
Page 50

HART Multiplexer System KFD*-HM*-16
Configuration
Figure 6.10 Command caching window
50
2018-04
Page 51

HART Multiplexer System KFD*-HM*-16
Configuration
6.7.5 Active Multiplexer Devices
Selecting Active Multiplexer Devices
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Configuration > Activated modules menu.
The Activated modules window is displayed.
3. Click Apply to confirm your selection.
4. Select Revert to reset your selection.
In the Activated modules window, select the active multiplexer slaves for each
multiplexer master. By default, only the master is activated. Select the connected
multiplexer slaves depending on the expansion level.
• Click Select all to select all multiplexer devices.
• Click Select none to select no multiplexer devices.
• With a single click, you can place or remove individual checkmarks in the list.
The checkmarks specify the active multiplexer devices.
Note!
Connected field devices are only accessible to the multiplexer master if their assigned
multiplexer slave is marked as active in this list.
Figure 6.11 Activated modules window
2018-04
51
Page 52

HART Multiplexer System KFD*-HM*-16
Configuration
6.8 HART Scan
6.8.1 Starting the HART Scan Function
The HART scan function can read in the entire project structure connected to
the serial interface: multiplexer master, multiplexer slaves, field devices.
Starting the HART Scan Function via Menu
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Related tasks > HART Scan menu.
The HART Scan window is displayed.
Starting the HART Scan Function via Context Menu
1. In the project window, right-click to select multiplexer master KFD2-HMM-16.
2. In the context menu, select Additional functions.
3. In the dropdown list, select HART Scan.
The HART Scan window is displayed.
Figure 6.12 HART Scan function
52
2018-04
Page 53

HART Multiplexer System KFD*-HM*-16
Configuration
Note!
Under certain circumstances, the HART scan function is not supported by all
framework applications or is subject to restrictions.
6.8.2 Executing the HART Scan Function
Performing a HART Scan
1. In the HARTscan wizard section in the HART scan window, select one of the following
options, see Figure 6.13:
• First commissioning: Select this option to create a complete basic setup of the
FDT project. Devices included in the FDT project, such as the multiplexer master,
multiplexer slaves, and field devices, including the communication settings, are recorded
and analyzed. If you select this option, you have to define additional settings in the next
steps, see Figure 6.14:
• Primary or secondary: 2 HART masters may be connected to a HART signal loop,
whereby the parameterization must differentiate between the primary master and
the secondary master. Select one of the options.
• Scan address 0 only: Select this option if you want the multiplexer master to use only
the address 0 to search for connected devices.
• Scan addresses 0 to 15: Select this option if you want the multiplexer master to
search for all connected devices with polling addresses between 0 and 15.
• Retries on "Busy": Number of repeat attempts to establish communication with
the field device if the field device reports Busy.
• Retries on error: Number of repeat attempts to establish communication with
the field device if a fault occurs.
• Update modules: Select this option if a module has been removed or added.
• Update field devices: Select this option if field devices have been removed or added.
• Update FDT project: Select this option to adapt the FDT project to the current
HART topology.
Note!
Depending on the selected settings and the number of field devices, a complete HART scan
may take up to several hours because additional addresses are queried and the individual
channels are addressed multiple times.
Recommendation:
Initially, select Scan address 0 only and keep the number of Retries on "Busy" and the
number of Retries on error as low as possible. If field devices are missing after the
HART scan, amend the settings and scan again.
2. Click Next to confirm and continue with the HART scan.
Before the HART scan starts, you can select which active multiplexer devices are to be
searched, see chapter 6.7.5.
If you select the option Automatic, all multiplexer devices to which field devices are
connected are automatically detected and activated.
If you select the option Manual, you can enable/disable the check boxes to determine
which active multiplexer devices are to be searched.
3. Confirm your selection by clicking Next to start the HART scan.
The HART scan is executed. Depending on the selected settings and the number of
field devices, a complete HART scan may take from a few seconds to several hours.
2018-04
53
Page 54

HART Multiplexer System KFD*-HM*-16
Configuration
Figure 6.13 HART Scan wizard
54
2018-04
Page 55

HART Multiplexer System KFD*-HM*-16
Configuration
Figure 6.14 HART Scan Wizard, communication options
2018-04
55
Page 56

HART Multiplexer System KFD*-HM*-16
Configuration
Reading In the XML File for Detection of the Sub Device Type
If a manufacturer has released several devices that have the same manufacturer ID and
device type ID, a third identification attribute is required for unique identification. This attribute
is referred to as a sub device type. The attribute is defined in the FDT specification and can
be detected by any DTM. However, the identification attribute is not defined in the HART
protocol and is not recognized in device communication. The file that is read at this point
converts the identification attribute so that this information can be read in the DTM. This file
must be provided by the device manufacturer.
1. Open the Explorer by clicking Open file under the Mapping file field.
2. Select the required XML file.
The file path of the XML file is displayed in the Mapping file field.
3. Alternatively, you can enter the file path of the XML file in the Mapping file field directly.
Figure 6.15 HART Scan wizard
56
2018-04
Page 57

HART Multiplexer System KFD*-HM*-16
Configuration
6.8.3 Results of the HART Scan
As the result of the HART scan, a table is output containing the following information about the
field devices found:
Loop Device data Match result Assigned DTM DTM action Apply
Slave and loop
address of the
field device
Table 6.1 Results table for the HART scan
Name and data
of the
field device
Match result Explanation
Single green checkmark The assigned DTM matches the device exactly.
Two green checkmarks There are several DTMs, that match the
Individual gray checkmark The Generic HART DTM has been assigned to the
Yellow warning triangle The assigned DTM does not match the device.
Table 6.2 Explanation of the match result
Specifies
whether the
HART scan
wizard has
found a suitable
DTM
Suggested DTM Specifies what
the HART scan
wizard will do
with the
selected DTM
field device data.
device as no device-specific DTM has been found.
Select this
check box to
apply the
changes for this
field device
DTM action Explanation
Yellow star No DTM has been assigned to the field device yet.
A new DTM will be created in the project tree.
Pen The DTM previously assigned to the device will be
replaced by the new DTM selected.
Red cross The field device for this DTM that exists in the project
Table 6.3 Explanation of the DTM action
is missing. The DTM will be removed from the
project tree.
2018-04
57
Page 58

HART Multiplexer System KFD*-HM*-16
Configuration
Figure 6.16 HART Scan result
Click on a row in the table to select the corresponding field device and to display additional
options in the lower section of the editing window:
In the Assigned DTM dropdown list, you can manually select which DTM is to be used for the
field device:
Figure 6.17
58
2018-04
Page 59

HART Multiplexer System KFD*-HM*-16
Configuration
In the table below, the data read out from the field device and the data contained in
the selected DTM is compared. This allows a comparison between the field device data
and the DTM:
Figure 6.18
Confirm your selection by clicking Next to complete the HART scan. The HART topology
determined in the HART scan can then be added to the device tree in the project window.
You will be prompted to save the project to store the modified HART topology.
Note!
Some manufacturers have different DTMs for the same device family. In this case, you have
to select the correct DTM from the dropdown list.
Note!
Some DTMS do not make this information available, meaning that automatic assignment
is not possible.
2018-04
59
Page 60

HART Multiplexer System KFD*-HM*-16
Configuration
After completion of the HART scan, the devices are added to the device tree in the
project window.
Figure 6.19
2018-04
60
Page 61

HART Multiplexer System KFD*-HM*-16
Configuration
6.9 Adding DTMs Manually
For known field devices, you can also add the device-specific DTMs in the project tree
manually. Proceed as follows:
Adding a Device-Specific DTM Manually via Device Catalog
Use drag-and-drop to move the device-specific DTM from the device catalog to the DTM
of the multiplexer slave that the device is to be assigned to.
The device-specific DTM is then added to the project.
Adding a Device-Specific DTM Manually via Context Menu
1. In the project window, right-click to select the DTM of the multiplexer slave that the device
should be assigned to.
2. In the context menu, select Add device.
3. Select the device-specific DTM from the list and confirm with OK.
4. Select the signal loop that the device is to be connected to and confirm with OK.
The device-specific DTM is then added to the project.
Figure 6.20 Manual insertion of a DTM
2018-04
61
Page 62

HART Multiplexer System KFD*-HM*-16
Operation
7Operation
Danger!
Explosion hazard from live wiring of circuits
If you connect or disconnect energized circuits in a potentially explosive atmosphere,
sparks can ignite the surrounding atmosphere.
Only connect or disconnect energized circuits in the absence of a potentially explosive
atmosphere.
Danger!
Explosion hazard from sparking when using operating elements
Using operating elements in a potentially explosive atmosphere can cause sparks that can
ignite the surrounding atmosphere.
Only use operating elements (e. g., switch, slider, button, etc.) in the absence of a potentially
explosive atmosphere.
7.1 Device Functions
The software functions described in this chapter are usually integrated in the
operating software of the process control system, i. e., the software functions are generally not
enabled or disabled via the described HART commands. Instead, they exist in the functions
(menu commands) of the operating software that take on these processes. Nevertheless, the
underlying HART commands are described because the functions may have different names
in the individual user interfaces and the underlying basic functions may not always be apparent
from the name. For a list of the commands supported see chapter 9.1.
All Functions at a Glance
The following list shows all the functions of the multiplexer master at a glance:
• 16 channels, expandable up to 256 channels by connecting up to 15 multiplexer slaves
• Up to 7936 signal loops per RS-485 interface
• Automatic search of all existing HART-compatible field devices (scan)
• Switchable, independent, cyclical querying of the HART variables (command caching)
• Acts as the primary or secondary multiplexer master
• Fast RS-485 interface (multidrop) with up to 56700 baud
• Integrated modem
• Removable terminals
• Power supply via Power Rail
• Approved for Zone 2
62
2018-04
Page 63

HART Multiplexer System KFD*-HM*-16
Operation
7.1.1 Number of Channels
The multiplexer master provides 16 channels for connecting field devices or control units that
support digital communication according to the HART specification. A maximum of
15 additional multiplexer slaves can be connected. These multiplexer slaves in turn support
16 channels. With just one multiplexer master, 256 channels can therefore be reached in
maximum configuration.
7.1.2 Multiplexer Table (Module Table)
The multiplexer master and the connected multiplexer slaves must be labeled as present in
a multiplexer table, see chapter 9.1 command 157. Only modules defined as present in this
table are included in communication. The multiplexer table consists of 16 bit, 1 bit for each
multiplexer address. The default is module 0 (multiplexer master) and 1 activated.
7.1.3 Interface
The multiplexer master acts as a transparent gateway between the maintenance station and
the field devices. The maintenance station is typically a computer with appropriate software,
see chapter 3.2. The maintenance station can address up to 31 multiplexer masters via a
RS-485 connection of up to 57600 baud. Since each multiplexer master can address up to
256 field devices, each RS-485 interface communicates with up to 7936 field devices.
7.1.4 HART Communication
As a digital communication system for maintenance and configuration purposes,
the HART protocol is supported by many field devices with conventional analog
4 mA to 20 mA circuits. The HART signal is modulated to the analog current as an FSK signal,
see chapter 3.1. The modulator/demodulator circuit (modem) required is integrated in the
multiplexer device. Only one HART-compatible field device can be connected to each
HART connection of the multiplexer device – there is no multidrop functionality.
Special procedures with regard to the HART communication:
• On the host side (RS-485), the extended address is always used, except in the case of
command 0.
• On the field device side, either the polling address or the extended address is used
depending on the need.
•The primary master and secondary master operating modes and the corresponding
time responses are supported on the field device side.
• On the host side, only the commands 0 to 3 and 11 to 13 are accepted from the
secondary host. Other commands are not accepted or are ignored.
• Commands to connected field devices are only accepted from the primary host.
• Extended messages and messages in burst mode are detected and used but are not
generated by the multiplexer device itself.
• A response buffer is available for a delayed response telegram. A message with an
initiating command that requires a long execution time can be temporarily stored here.
2018-04
63
Page 64

HART Multiplexer System KFD*-HM*-16
Operation
7.1.5 Constructing the Signal Loop/Scan (Software Function)
When the power supply to the device is switched on, the device searches the
multiplexer devices listed in the multiplexer table for the connected HART field devices
(command 0 and 4
This process can also be performed by the maintenance station connected as is necessary, for
example, for communication with new HART-compatible field devices connected. The length
of this process depends:
• on the number of multiplexer slaves connected,
• on the number of connected HART-compatible field devices,
• on the loop search type, see chapter 9.1, command 153,
• on the number of message repeats in the case of a fault, or
• on whether the query has been answered.
With 16 field devices the duration is between 15 s and 30 s (e. g., for use by only one
multiplexer master without multiplexer slaves).
Note!
In the DTM, the parameters for the signal loop construction can be parameterized in the
Communication menu in the Communication to field devices (as HART master) section.
For a detailed description, see chapter 6.7.3.
1
) and in doing so generates the internally required access tables.
During the scanning process, only certain read commands
(commands 0, 1, 2, 3, 11, 12, 13, 48, 129) are accepted by the maintenance station.
All other commands result in the response Busy until the scanning process is concluded.
7.1.6 Cyclical Data Retrieval/Command Caching (Software Function)
The multiplexer device can read cyclical data from up to 31 field devices. To do this, the
scan option (command 137) must be set for the field device and the scan function in the
multiplexer device must be activated (command 149, function 1). The Scan command option
(command 147) defines which data is to be transferred, see chapter 9.1.
Note!
In the DTM, the scan function for cyclic data retrieval can be activated and parametrized in
the Command caching menu. For a detailed description, see chapter 6.7.4.
If the scan function is activated, the field devices with the scan option activated are regularly
checked for data. To do this, the scan command that reads one or more variables from the
field device is executed. If a field device does not respond, it is designated as Disappeared
(command 129) but it remains in the search list. This means that the field device will be
searched for again during the next cycle. If a field device has disappeared but responds
correctly with one of the next search commands, it is designated as Appeared. If another
field device has responded instead, the Mismatched status appears.
64
1
Command 4 is also used for field devices that support only older HART specifications up to command 4.
2018-04
Page 65

HART Multiplexer System KFD*-HM*-16
Operation
7.1.7 Variant of the Scan Function (Special Scan Function)
The special scan function (command 149, function 2) uses an additional parameter that
defines the minimum length of expected data bytes. This parameter can be different for each
signal loop but it must be set for each signal loop to be scanned.
Note!
The special scan function cannot be parameterized via the DTM. It can only be parameterized
via HART commands from the host.
The scanning process itself takes place as described in the chapter above. However, the
response of the field device is compared with the expected data length. If the length of the
response is below the specified minimum data length, the response is rejected. If the minimum
data length is 0, the response is always stored.
7.2 Software Functions
7.2.1 Field Device List
Scanning Signal Loops
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Device actions > Scan loops menu.
The Scan loops for field devices window is displayed.
In the Scan loops for field devices window, you can start a scan to identify all field devices
connected to the multiplexer master. Proceed as follows:
• In the left-hand area, select the signal loops that you want to search. If you select a slave,
all signal loops of the slaves are scanned.
• Selecting the Scan selected loops button starts the scan of the signal loops.
The scan may take several minutes.
Once the signal loops have been scanned, you can find more information about the connected
field devices in the field device list, see chapter 7.2.2.
2018-04
65
Page 66

HART Multiplexer System KFD*-HM*-16
Operation
Figure 7.1 Scan loops window
66
2018-04
Page 67

HART Multiplexer System KFD*-HM*-16
Operation
7.2.2 Field Device List
Selecting the Field Device List
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Related tasks > Connected field devices menu.
The Connected field devices window is displayed.
In the Connected field devices window, a table detailing information on the field devices
connected to the multiplexer master is shown:
Table column Explanation
Modules Module to which the field device is connected
Loop Signal loop in which the field device is connected
Polling address Polling address of the field device
Unique ID Unique, unchanging address of the field device
Device type Device type
Manufacturer Manufacturer of the field device
HART revision HART revision under which the field device is operated
Long tag Long device tag of the field device
Tag Tag for identification of the field device
Descriptor Description for the field device
Date Date of the last change to the identification information
Message Any user-created message/comment
Table 7.1 Explanation of the field device list
2018-04
67
Page 68

HART Multiplexer System KFD*-HM*-16
Operation
Figure 7.2 Connected field devices window
68
2018-04
Page 69

HART Multiplexer System KFD*-HM*-16
Operation
7.2.3 Device Diagnosis
Selecting a Diagnosis
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Related tasks > Diagnosis menu.
The Diagnosis window is displayed.
In the Diagnosis window, detailed diagnostic information regarding the multiplexer master
and the field devices connected to it can be retrieved.
In the System overview section, the device tree is displayed on the left-hand side with
the connected devices. Click on a device to select it.
The right-hand section displays device-specific, detailed diagnostic information.
Select the Update diagnosis button above the System overview section to update
the diagnostic information.
Note!
For a precise explanation of the diagnostic information, see chapter 7.3.
Figure 7.3 Diagnosis window
2018-04
69
Page 70

HART Multiplexer System KFD*-HM*-16
Operation
7.2.4 Resetting the Configuration Flag
Resetting the Configuration Flag
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the
Device actions > Reset "Configuration changed" flag menu.
The Reset "Configuration changed" flag window is displayed.
The "Configuration changed" flag is a flag of the standard HART device status. It is always
set when a parameter has been changed in the configuration of the device.
In the Reset "Configuration changed" flag window, you can reset the
"Configuration changed" flag. To do this, select the
Reset "Configuration changed" flag button.
Figure 7.4 Reset "Configuration changed" flag window
70
2018-04
Page 71

HART Multiplexer System KFD*-HM*-16
Operation
7.2.5 Resetting the Device
Resetting the Device
1. Use the mouse to double-click the multiplexer master KFD2-HMM-16 in
the project window.
2. In the editing window, open the Device actions > Reset device menu.
The Reset device window is displayed.
In the Reset device window, you can reset the multiplexer master. To do so, select
the Reset device button.
Note!
Please ensure that the multiplexer master restarts after the reset. During the reset,
communication to all connected field devices is initially interrupted. After the restart, all
signal loops are scanned for any existing HART-compatible field devices. During this time,
no communication with the field devices is possible.
For further information about the scanning process, see chapter 5.2.4 and 7.1.5.
Figure 7.5 Reset device window
2018-04
71
Page 72

HART Multiplexer System KFD*-HM*-16
Operation
7.3 Diagnosis and Troubleshooting
This chapter provides operating instructions to be used if faults occur and describes the
possible causes of such faults. Faults and failures are reported via the following means:
• LED indication, see chapter 7.3.1
• Status/response code, see chapter 7.3.2
• Extended device status, see chapter 7.3.3
7.3.1 LED Indication
After you have switched the device on, the following fault states can occur during the
initialization process:
Red Green Orange Cause Corrective action
Off Off Off • No power supply present.
• LED(s) faulty.
On On On Device hardware fault (CPU, ROM) Send the device to Pepperl+Fuchs for
On Off Off Device hardware fault (CPU, ROM) Send the device to Pepperl+Fuchs for
On On Off • Device hardware fault
(CPU, ROM)
• Device parameterization
(command 161) faulty.
Table 7.2
• Check the power supply.
• Switch on DIP switch 1, briefly
disconnect the power supply. LEDs
flash one after the other.
repair.
repair.
• Send the device to Pepperl+Fuchs for
repair.
• Parameterize the device again. If this
is not successful, the device must be
sent to Pepperl+Fuchs for repair.
72
2018-04
Page 73

HART Multiplexer System KFD*-HM*-16
Operation
7.3.2 Status/Response Code
Two status bytes, known as the Response code, are included in each field device message.
These include three types of information:
• Communication faults
• Command responses
• Device status
Dependent on bit 7, the first two types are contained in the first byte of the status.
The device status is always transferred in the second byte.
Structure of the First Byte (Communication Fault)
If bit 7 is set (1), the first status byte contains a summary of communication faults.
This information is coded bit by bit.
If bit 7 is deleted (0), the first status byte contains a summary of command responses.
This information is numbered and not coded bit by bit.
Communication Faults
The byte contains information concerning the receipt of a message. The individual bits indicate
a detected fault, which has resulted in the message not being accepted. It is therefore not
possible to provide a response to the message. This problem can only be avoided by:
• Repeating the command,
• Checking the connection,
• Using terminators, or
• Reducing the baud rate.
Bit Meaning
7 6 5 4 3 2 1 0
1 Communication fault, if bit 7 = 1, coded bit by bit
1 1 Parity fault
1 1 Overflow fault
1 1 Message fault
1 1 Checksum fault
1 0 Always 0 (reserved)
1 1 Receive buffer overflow
1 1 (Undefined)
Table 7.3
2018-04
73
Page 74

HART Multiplexer System KFD*-HM*-16
Operation
Command Responses
The first byte contains information regarding the execution of a command.
The command-specific response code documents the execution of the command.
In contrast to the communication faults, the command responses are not coded bit by bit and
are instead numbered from 0 to 127.
For command responses reported by multiplexer devices, two instances are warnings
(codes 8 and 31). In these cases the processing of the command is continued. In other cases,
there are faults indicating that the initiating command could not be correctly executed.
The meaning of the codes is explained in the following table.
Code Designation Meaning Can occur in the case of
a command
2 Invalid selection Invalid selection: The selected code/index is
3 Passed parameter too
large
4 Passed parameter too
small
5 Too few data bytes
received
8 Warning Here (132): Preamble length is not within
9 1st parameter too large The first of the two parameters is too large. 145
11 2nd parameter too large The second of the two parameters is too
16 Access restricted The command was ignored because the
17 Too many items
requested
31 Warning Here (137): Scan value has not been
32 Busy The device is executing a function that
64 Command not
implemented
65 Not specified Parameter is not within the permissible
Table 7.4
not permitted.
The parameter value was too large. 59, 129, 155
The parameter value was too small. 59
The message has no faults but contains
fewer bytes than expected for the execution
of the command.
the range of 5 to 20 and has been set to 5
or 20
large.
current state of the device does not permit
the correct execution of the command.
Too many items have been requested. 131, 132, 133,
changed as it is identical.
cannot be interrupted by this command.
Command does not exist and therefore
cannot be executed. This fault message is
also output if an fault occurs that cannot be
specified more precisely by the device.
range.
147, 149, 151, 153
17, 18, 59, 129 to 141,
145, 147, 149, 151, 153,
154, 155, 157
132
145
6, 17, 18, 38, 41, 42, 48,
59, 106, 128 to 157
135 to 141, 154
137
6, 17, 18, 38, 41, 42, 59,
106, 128, 130 to 157
Almost all
132, 137
74
Note!
Additional information can be found in /1/, see chapter 9.3.
2018-04
Page 75

HART Multiplexer System KFD*-HM*-16
Operation
Structure of the Second Byte (Device Status)
If a communication fault is reported in the first byte (bit 7 = 1), the second byte described here
has no significance (always 0). Otherwise it contains the overall status of the field device, i. e.,
regardless of the commands. The individual bits have the following meanings:
Bit Designation Meaning Action
7 Malfunction of the
field device
6 Configuration
changed.
5 Switch-on process is
running.
4 Extended device
status available.
3 Analog output current
cannot be changed
(primary variable).
2 Analog output current
has reached its limit
(primary variable).
1 Variable (not the
primary) outside the
range.
0 Primary variable
outside the range.
Table 7.5
Hardware fault. The extended device
status may provide further
information, see chapter 7.3.3.
A write command has been
executed.
The power supply has been switched
on or a reset has been triggered.
Volatile data is reset to the default
setting.
Further status messages are
available and can be called up,
see chapter 7.3.3.
The primary variable is set to the
requested value and no longer
follows the process.
The primary variable is outside its
limit values and therefore no longer
corresponds to the process value.
The data detected by the sensor –
not the data for the primary variable –
lies outside the operating range. The
extended device status may provide
further information,
see chapter 7.3.3.
Primary variable outside the range.
The measured value detected by the
sensor is outside the operating
range.
• Read extended device status,
• Check LEDs, see chapter 7.3.1.
• Parameterize device again.
This bit can be deleted using
command 38.
Wait for the switch-on process and
then parameterize the device.
Read extended device status,
see chapter 7.3.3.
Always 1
Has no function on the
multiplexer device as there is no
analog output.
Always 0
Has no function on the
multiplexer device.
Always 0
Has no function on the
multiplexer device.
Always 0
Has no function on the
multiplexer device.
see chapter 7.3.3.
2018-04
Note!
Additional information can be found in /1/, see chapter 9.3.
75
Page 76

HART Multiplexer System KFD*-HM*-16
Operation
7.3.3 Extended Device Status
The extended device status can be retrieved using command 48. The command provides
5 byte of information which are arranged thematically:
First Byte
The operation is currently in progress
The byte indicates which operation is currently running. The information is coded bit by bit.
The coding is shown in the following table:
Bit Operation in progress Meaning
7 Reset Switch-on operation is running and must be
6 Rebuild Rebuild operation is running and must be
5 Internal EEPROM write
operation
4 Scan Scanning process is running and must be
3 Self-test (command 41) Performs the device self-test, such as when
2to0 Reserved Reserved.
Table 7.6
completed.
completed.
Switching off the power supply may result in the
loss of parameterization.
completed.
switching on the supply voltage. If no fault occurs,
the status message Malfunction is deleted if
the message has been set.
Second Byte
Hardware fault
The byte indicates which operation is currently running. The information is coded bit by bit. The
coding is shown in the following table:
Bit Detected hardware fault Meaning/remedial action
7 Signal loop OR link of all detected hardware faults in the
6 ROM fault Send the device to Pepperl+Fuchs for repair.
5 EEPROM fault Send the device to Pepperl+Fuchs for repair.
4to0 Reserved Reserved.
Table 7.7
signal loops. Check the field devices and their
cabling, then run Scan loops, see chapter 7.2.1.
76
2018-04
Page 77

HART Multiplexer System KFD*-HM*-16
Operation
Third Byte
Scan fault
The byte indicates an OR link for all the faults detected during the scanning process.
Example: If one field device is detected as Disappeared and another as Mismatched,
these two bits are set at the same time. The bit by bit coded information is shown in
the following table:
Bit Status Meaning Action
7 Reserved Reserved.
6 Searching Field device is searched for due
to the Disappeared report.
5 Disappeared Field device is no longer
responding.
4 Appeared Field device is responding
again.
3 Mismatched Another field device has
responded instead.
2to0 Reserved Reserved.
Table 7.8
• Check the cabling.
• Check the field device.
Check the cabling.
Field device was replaced with
another field device. Check the
field device, rebuild
signal loops.
Note!
Additional information can be found in /1/, see chapter 9.3.
2018-04
77
Page 78

HART Multiplexer System KFD*-HM*-16
Dismounting, Maintenance, and Repair
8 Dismounting, Maintenance, and Repair
Danger!
Explosion hazard from live wiring of circuits
If you connect or disconnect energized circuits in a potentially explosive atmosphere,
sparks can ignite the surrounding atmosphere.
Only connect or disconnect energized circuits in the absence of a potentially explosive
atmosphere.
Danger!
Danger to life from using damaged or repaired devices.
Using a defective or repaired device can compromise its function and its electrical safety.
• Do not use a damaged or polluted device.
• The device must not be repaired, changed or manipulated.
• If there is a defect, always replace the device with an original device from Pepperl+Fuchs.
Disconnecting the Device from the Circuit
1. Disconnect the power supply.
2. Disconnect the connection to the maintenance station or the process control system.
3. Disconnect the connection to the termination board.
4. Disconnect the connection to the other devices of the HART multiplexer system.
5. Disconnect the connection to other participants.
Disconnecting Circuits
1. Disconnect the field circuit.
2. Disconnect the control circuit.
3. Disconnect the power supply.
78
2018-04
Page 79

HART Multiplexer System KFD*-HM*-16
3 1
4
4
2
Dismounting, Maintenance, and Repair
Removing the Device
Use a suitable slot-head screwdriver for dismounting the device.
1. Insert the screwdriver (4) into the groove of the red mounting bracket (3).
2. Turn the screwdriver (4) in the groove until the red mounting bracket (3) springs back.
3. Repeat these steps on the other side of the device.
4. Remove the device (2) from the DIN mounting rail (1).
Figure 8.1 Dismounting the device from the DIN mounting rail
1 35 mm DIN mounting rail
2 Device
3 Mounting bracket
4 Slot-head screwdriver
2018-04
79
Page 80

HART Multiplexer System KFD*-HM*-16
Appendix
9Appendix
9.1 Supported HART Commands
The following tables show the HART commands supported by the HART multiplexer system.
The HART commands are divided into 3 groups:
• Universal commands
• Common practice commands
• Device-specific commands
Note!
The universal commands and common practice commands are described in detail in /1/,
see chapter 9.3. At this point, only the functions are explained, not the underlying
data structures of the HART protocol.
9.1.1 Universal Commands
Command Action Meaning
0 Read unique device
identification.
A 12 byte device identification is given in response.
1 Read HART variables (data). Commands are only supported by the
2
3
6 Set polling address. This command will not be accepted and the messages
11 Read unique device
identification using the tags.
12 Read message. The 32-digit message is read, see also command 17.
13 Read the tag, description,
and date.
17 Save message. The 32-digit message is written, see also command 12.
18 Save the tag, description,
and date.
Table 9.1
HART multiplexer system for compatibility purposes and
have no significance. However, in the field devices
(e. g., scan function) they have the following meanings:
• 1: Read primary variable.
• 2: Read primary variable as a current (mA) and
percentage of the measuring range.
• 3: Read primary variable as a current (mA) and four
(pre-defined) dynamic variables.
Access restricted or Busy will be returned.
A 12 byte device identification is given in response if the
specified tag corresponds to the tag stored in the
HART multiplexer system.
Read the 8-digit tag, the 16-digit description, and the date.
Save an 8-digit tag, a 16-digit description, and a date.
80
2018-04
Page 81

HART Multiplexer System KFD*-HM*-16
Appendix
9.1.2 Common Practice Commands
Command Action Meaning
38 Reset the status
Configuration changed.
41 Perform device self-test. Performs the device self-test, such as when switching on
42 Perform device reset. Immediately after the command confirmation, the
48 Read extended
device status.
59 Define the number of
response preambles.
106 Delete all delayed responses
pending for the master.
Table 9.2
Delete status message, see chapter 7.3.2.
the power supply. If no fault occurs, the status message
Malfunction is deleted if it has been set, see chapter 7.3.2.
device processor is reset.
See chapter 7.3.3.
The number of preambles inserted in message responses
can be set to between 2 and 20. The default setting is 4.
The pending response messages are deleted. As only one
response message buffer exists, the buffer is always deleted
in accordance with the specification regardless of the
requesting master.
9.1.3 Device-Specific Commands
Command Action Meaning
128 Read the parameters of the
multiplexer device.
129 Read the status of the
signal loop.
130 Read field device list
(maximum of 49 entries,
starting with the specified
index).
131 Read static data from up to
22 field devices.
132 Write static data from up to
22 field devices.
133 Delete field devices from the
field device list
(max. 35 simultaneously).
134 Read scan list
(max. 49 entries, starting with
the specified index).
2018-04
The current parameterization is read from the
multiplexer device.
This command can be used to query the status of
each signal loop. The following information is provided:
• Existing hardware faults
• Scan is in progress.
• Scan activated for this signal loop.
• Field device is being searched for due to the
• Field device is no longer responding (Disappeared).
• Field device responds again (Appeared).
• Another field device has responded instead
The extended addresses of up to 49 field devices are
returned from the specified list entry.
For the specified extended addresses, the function returns
the following field device data:
• Number of the signal loop (0 to 15)
• Polling address
•Supported HARTrevision
• Required minimum number of preambles (5 to 20)
Write the static data, see command 131. A preamble length
outside the range of 5 to 20 is set to 5 or 20.
Field devices with the specified extended address
are deleted from the field device list (and the scan list).
The extended addresses of up to 49 field devices
are returned from the specified list entry.
Disappeared designation.
(Mismatched).
81
Page 82

HART Multiplexer System KFD*-HM*-16
Appendix
Command Action Meaning
135 Read dynamic data from up
to 7 field devices.
136 Read scan status of up to
31 field devices.
137 Write scan status of up to
31 field devices.
138 Read fault overview of up to
27 field devices.
139 Delete fault overview of up to
35 field devices.
140 Read the number of
command requests and
command faults from up to
16 field devices.
141 Delete the number of
command requests and
command faults from up to
16 field devices.
142 Read all communications of
the multiplexer devices.
143 Delete all communications of
the multiplexer devices.
144 Number of message repeats. • Repetitions in the event of Busy report: 0 to 11,
145 Write the number of
message repeats.
146 Read the specified
scan command.
147 Specify scan command.
For the specified extended addresses, the function returns
the following data:
• The specified scan command
• Extended address
•HARTdata
For the specified extended addresses, the function returns
the scan status of the field device (0 = deactivated,
1 = activated).
Set the scan status for the specified extended addresses
(0 = deactivated, 1 = activated).
The fault overview provides an OR combination of
communication faults and status bits.
Fault overview is deleted.
Communication statistics on received or bad messages
are returned.
Communication statistics are deleted.
The communication statistics concerning
the multiplexer devices are returned.
The communication statistics concerning
the multiplexer devices are deleted.
default setting is 0
• Repetitions in event of communication faults: 0 to 11,
default setting is 2
During the scan, the HART commands 1, 2, or 3 can be
executed, see above.
148 Read scan status. This reads or specifies the status of the scan function,
149 Write scan status.
150 Read master type. • 1 = Primary master, default setting
151 Write master type.
152 Read loop search type. The loop search type defines which polling address is used
153 Write loop search type.
see chapter 7.3.3.
• 0: Scan function is deactivated, default setting after
a device reset.
• 1: Normal scan function is activated.
• 2: Special scan function is activated,
see command 158, 159.
• 0 = Secondary master
to search for a device that has not responded after repeated
requests, (disappeared, see also command 129).
• 0: Single field device, 4 mA to 20 mA (single analog),
only polling address 0, default setting
• 1: Single field device, unknown (single unknown), first of
the polling addresses 0 to 15
• 2: Reserved for multidrop
1
82
2018-04
Page 83

HART Multiplexer System KFD*-HM*-16
Appendix
Command Action Meaning
154 Scan up to 83 specified
signal loops.
155 Pass through host command
to the device and response to
the host.
156 Read multiplexer table.
(16 multiplexer devices)
157 Write multiplexer table.
(16 multiplexer devices)
158 Read special
scan parameters.
159 Write special
scan parameters.
160 Read delay period for
channel change.
161 Write delay period for
channel change.
Table 9.3
See chapter 7.1.5 and 7.2.1.
This enables any command to be sent to a field device and
its response evaluated by the multiplexer device without any
changes.
Reads the specified multiplexer table, see command 157.
Determines which multiplexer devices (multiplexer master
and up to 15 multiplexer slaves) are assigned
(2 byte, coded bit by bit).
The current special parameters and the field device data
(if available) for the specified signal loop is provided.
These include:
• Number of the signal loop
• Fault flag (0 = OK, 1 = special scan is not active)
• Polling address, always 0, as there is no multidrop
• The minimum number of data bytes for the special scan
• The scan command used
• Extended address
• Number of available data bytes
• Data byte content
For the specified signal loop and the polling address
(must always be 0), the minimum number of data bytes
(0 to 62) and the scan command to be used can be written.
When changing the communication channel (0 to 255),
the multiplexer can include a waiting period (0 ms to 300 ms)
before HART commands are sent to the channel.
1
The search process is 16 times longer with no field device connected, as all 16 polling addresses are checked.
2018-04
83
Page 84

HART Multiplexer System KFD*-HM*-16
Appendix
9.2 Assignment of the 26-Pin IDC Socket with Analog HART Signals
1
25
Figure 9.1
Pin Signal Pin Signal
1 Analog ground 14 Analog ground
2 Analog ground 15 Analog ground
3 Analog ground 16 HART channel 9
4 Analog ground 17 HART channel 10
5 Analog ground 18 HART channel 11
6 HART channel 1 19 HART channel 12
7 HART channel 2 20 HART channel 13
8 HART channel 3 21 HART channel 14
9 HART channel 4 22 HART channel 15
10 HART channel 5 23 HART channel 16
11 HART channel 6 24 Analog ground
12 HART channel 7 25 Analog ground
13 HART channel 8 26 Analog ground
Table 9.4
2
26
84
2018-04
Page 85

HART Multiplexer System KFD*-HM*-16
Appendix
9.3 Bibliography
/1/
HART Communication Foundation: HART Communication Protocol Specification
HCF_SPEC-13, Revision 7.5
https://fieldcommgroup.org/hart-specifications
/2/
HART Communication Foundation: HART Application Guide
HCF_LIT-039 Rev. 7.1
https://fieldcommgroup.org/technologies/hart/documents-and-downloads-hart
/3/
Romilly Bowden
HART Field Communications Protocol: A Technical Overview, 2007
Fisher-Rosemount
2018-04
85
Page 86

HART Multiplexer System KFD*-HM*-16
Appendix
9.4 Glossary
Address
In communication systems, an address is used to identify the device to which a message is
addressed. HART uses two addressing modes: a polling address in the range 0 to 15 and the
extended address consisting of 38 bit. The polling address 0 is reserved for 4 mA to 20 mA
analog field devices in point-to-point connections. The polling addresses 1 to 15 are reserved
for field devices in multidrop connections.
Broadcast mode
See burst mode
Burst mode
A communication mode in which the multiplexer master instructs field devices to continuously
transmit process values – for example, the primary variable – to the multiplexer master without
further instruction. The multiplexer master recognizes and supports this mode but does not put
field devices in this mode itself.
Extended address
See Address
DTM
The DTM (DTM – Device Type Manager) contains all the data and functions of a device.
Every DTM contains its own user interface optimized for the device. The device and
communication DTMs can be integrated in any FDT frame application, such as PAC Tware .
The DTM offers almost no restriction with regard to display and user guidance. This means that
all available device functions can be operated according to the user's needs. Operation is
supported by graphics. The DTM technology enables consistent operation of a device in all
FDT systems.
Pepperl+Fuchs generates DTMs for HART-compatible devices by converting the
device description (DD) of these devices for use with PACTwa re .
Essentially, there are two different types of DTM:
• Device DTMs
Device DTMs are DTMs for configuring field devices such as transmitter power supplies,
signal converters, and trip amplifiers.
• Communication DTMs
Communication DTMs are required for communication with a device via a point-to-point
connection or via any network structures. The communication DTMs are available for
various interfaces, such as an RS-232 interface or a USB interface.
86
2018-04
Page 87

HART Multiplexer System KFD*-HM*-16
Appendix
FDT
The FDT concept (FDT – Field Device Tool) created a standard that can be used to integrate
devices in various user interfaces (framework applications such as PACTware ).
The FDT concept enables open and continuous device operation from the control level to the ,
regardless of the bus systems used. The FDT concept specifies the data exchange between
the device-specific driver and the framework application. Every communicating device has a
device-specific driver (DTM) that is integrated in the framework application.
FSK
Abbreviation for Frequency Shift Keying. Method of encoding the digital information 0 or 1 with
two different frequencies.
HART
Abbreviation for Highway Addressable Remote Transducer. Designation for communication
according to the HART protocol. HART is a master-slave system.
Host
Higher-level system, e. g., maintenance station, computer, or process control system.
Polling address
See Address
Master
A device – e. g., the control system – in a master-slave system which initiates all
transmission requests and commands.
Master-slave system
Communication system in which a master initiates all transmission requests and commands
and a slave responds to the transmission requests and commands.
Multidrop
In contrast to point-to-point connections, several (field) devices may be connected to one
segment (core pair). To allow each device to be addressed individually, the device must have
a unique address. As communication can only take place with one field device at a time,
cycle times increase in proportion to the number of field devices. In HART multidrop operation,
field devices fix their current consumption at 4 mA to enable parallel operation of up to
15 devices.
Multi master
2018-04
HART allows the connection of two masters, a primary master and a secondary master. The
main station is configured as the primary master – this is generally the control system or the
main control. A second station is configured as secondary master – this can be a handheld or a
maintenance station. The difference between the primary and secondary masters is the priority
of access, i. e., the primary master has a higher priority than the secondary master. Messages
sent by the masters are characterized by a master bit so that the masters can assign the
message responses to their own messages.
87
Page 88

HART Multiplexer System KFD*-HM*-16
Appendix
PACTware
PACTw ar e (PACTwa re – Process Automation Configuration Tool) is
a manufacturer-independent operating software for devices. In the past, it was often necessary
to use multiple manufacturer-specific programs to be able to operate different devices.
PACTw ar e enables you to operate any number of devices with just this software. PACTwa re is
not only a configuration tool, it also offers an interface to HART-compatible field devices as
well as to bus systems such as PROFIBUS, MODBUS, and ControlNet. PACTwa re offers
many features that allow users to simplify the plant documentation, to create trend curves, and
to monitor signals using HART data.
TM
Point-to-point connection
In point-to-point connections, only two communication participants can be connected to one
segment (core pair). A point-to-point connection is, for example, the master-slave connection
of multiplexer device to field device.
Primary variable
This variable is a process measured value of the field device. The unit differs according to the
HART command (see commands 1, 2 and 3). The primary variable of a pressure transducer
may be, for example, the measured process pressure in bar.
Primary master
See Multi master
Secondary variable
This variable is a further, additional process measured value of the field device. Up to 4
additional values are supported via HART. This variable can only be read using
HART command 3.
Secondary master
See Multi master
Slave
A device in a master-slave system that receives commands from a master. A slave cannot
initiate a transmission request.
Smart field device
Intelligent, programmable field device with microprocessor and memory which is able to
perform calculations, integrated diagnostics, and fault reports and can communicate with a
remote control.
Tag
Unique identifier of the C&I point (Control and Instrumentation technology) of the field device
within a process plant.
88
2018-04
Page 89

HART Multiplexer System KFD*-HM*-16
Notes
2018-04
89
Page 90

HART Multiplexer System KFD*-HM*-16
Notes
90
2018-04
Page 91

HART Multiplexer System KFD*-HM*-16
Notes
2018-04
91
Page 92

Subject to modifications
Copyright PEPPERL+FUCHS • Printed in Germany
www.pepperl-fuchs.com
Worldwide Headquarters
Pepperl+Fuchs GmbH
68307 Mannheim · Germany
Tel. +49 621 776-0
E-mail: info@de.pepperl-fuchs.com
For the Pepperl+Fuchs representative
closest to you check www.pepperl-fuchs.com/contact
PROCESS AUTOMATION –
PROTECTING YOUR PROCESS
DOCT-0120F
04/2018
 Loading...
Loading...