

Page 1

Confidently. Accurately.
User Manual
GPS-Base
GNSS-aided inertial
navigation
system
Page 2
Oxford Technical Solutions
2
Legal notices
Copyright of Oxford Technical Solutions at oxts.com.
© 2008–2018, Oxford Technical Solutions Ltd.
Unauthorised use, copying or distribution is not permitted. All brand names are trademarks of
their respective holders.
Any redistribution of the software must reproduce the above copyright notice, this list of
conditions and the following disclaimer in the documentation and/or other materials provided
with the distribution.
Environmental protection
Waste electrical products should not be disposed of with household waste. Please recycle
where facilities exist. Check with your Local Authority or OxTS representative for recycling
advice.
Page 3

GPS-Base Manual
Revision: 180928
3
Disclaimer
Information furnished is believed to be accurate and reliable. However, Oxford Technical
Solutions Limited assumes no responsibility for the consequences of use of such information
nor for any infringement of patents or other rights of third parties which may result from its
use. No license is granted by implication or otherwise under any patent or patent rights of
Oxford Technical Solutions Limited. Specifications mentioned in this publication are subject
to change without notice and do not represent a commitment on the part of Oxford Technical
Solutions Limited. This publication supersedes and replaces all information previously
supplied. Oxford Technical Solutions Limited products are not authorised for use as critical
components in life support devices or systems without express written approval of Oxford
Technical Solutions Limited.
The software is provided by the copyright holders and contributors “as is” and any express or
implied warranties, including, but not limited to, the implied warranties of merchantability
and fitness for a particular purpose are disclaimed. In no event shall the copyright holders or
contributors be liable for any direct, indirect, incidental, special, exemplary, or consequential
damages (including, but not limited to, procurement of substitute goods or services; loss of
use, data, or profits; or business interruption) however caused and on any theory of liability,
whether in contract, strict liability, or tort (including negligence or otherwise) arising in any
way out of the use of this software, even if advised of the possibility of such damage.
The GPS-Base includes a radio modem specified at the time of manufacture, and needs to be
configured by the NAVbase software for the specific radio. The exact use of the radio differs
between regions and countries. The user of a GPS-Base must ensure the device is not
operated in any way without the permission of the local authorities on frequencies; other than
those specifically reserved and intended for use without a specific permit. OxTS or its
distributors are not responsible in any way for any claims or penalties arising from the
operation of its equipment with radio in ways contradictory to local regulations and/or
requirements and/or laws.
Contact details
Tel: +44 (0) 1869 814 253
Fax: +44 (0) 1869 251 764
Web: http://www.oxts.com
Email: support@oxts.com
Oxford Technical Solutions Limited
77 Heyford Park
Upper Heyford
Oxfordshire
OX25 5HD
United Kingdom
Revision
Document Revision: 180928.
Page 4
Oxford Technical Solutions
4
Warranty
Oxford Technical Solutions Limited warrants its products to be free of defects in materials
and workmanship, subject to the conditions set forth below, for a period of one year from the
Date of Sale.
'Date of Sale' shall mean the date of the Oxford Technical Solutions Limited invoice issued
on delivery of the product. The responsibility of Oxford Technical Solutions Limited in
respect of this warranty is limited solely to product replacement or product repair at an
authorised location only. Determination of replacement or repair will be made by Oxford
Technical Solutions Limited personnel or by personnel expressly authorised by Oxford
Technical Solutions Limited for this purpose.
In no event will Oxford Technical Solutions Limited be liable for any indirect, incidental,
special or consequential damages whether through tort, contract or otherwise. This warranty
is expressly in lieu of all other warranties, expressed or implied, including without limitation
the implied warranties of merchantability or fitness for a particular purpose. The foregoing
states the entire liability of Oxford Technical Solutions Limited with respect to the products
herein.
Page 5

GPS-Base Manual
Revision: 180928
5
Table of contents
Common abbreviations ..............................................................................................................7
Introduction ................................................................................................................................8
How do base stations work?...............................................................................................8
Transmitting the corrections.............................................................................................10
Correction types................................................................................................................11
Transmission frequency....................................................................................................11
File logging.......................................................................................................................12
Scope of delivery......................................................................................................................13
Conformance notices ...............................................................................................................15
Regulatory testing standards ............................................................................................15
Operation..................................................................................................................................16
Process of setting up the GPS-Base: ................................................................................16
General precautions ..........................................................................................................16
Selecting a suitable antenna location, and setting up the tripod......................................16
Setting up the tripod and antenna.....................................................................................17
Connecting the GNSS antenna and radio modem cables................................................18
Powering up and monitoring the GPS-Base ....................................................................19
Communicating with the product ................................. ...........................................................22
The N AVbase interface............................................................................................................23
Product Selection..............................................................................................................23
Connection........................................................................................................................24
Remember port selection ..........................................................................................24
Settings..............................................................................................................................24
Averaging time..........................................................................................................25
Restore position from file .........................................................................................26
Enter antenna position...............................................................................................26
Leave unchanged ......................................................................................................26
Advanced...................................................................................................................26
Status .........................................................................................................................27
Communication.........................................................................................................28
Latitude, longitude, altitude......................................................................................28
Base Station ID .........................................................................................................28
Logging Novatel binary............................................................................................28
Logging RTCMv3.....................................................................................................29
Save position to file...................................................................................................29
Save position to GPS-Base .......................................................................................29
Save setting to GPS-Base .........................................................................................29
Start logging..............................................................................................................30
LED status................................................................................................................................31
Hardware LED descriptions ..............................................................................................20
Page 6

Oxford Technical Solutions
6
SATEL radio status .......................................................................................................... 31
Freewave radio status ...................................................................................................... 31
Differential correction message format .................................................................................. 33
Message output and frequency:....................................................................................... 33
Repeatability............................................................................................................................ 35
Index ........................................................................................................................................38
Specifications...........................................................................................................................37
Page 7

GPS-Base Manual
Revision: 180928
7
Common abbreviations
AB Dynamics Anthony Best Dynamics
CAN Controller Area Network
CEP Circular Error Probability
CPU Central Processing Unit
DGPS Differential Global Positioning System
ECCN Export Control Classification Number
EGNOS European Geostationary Navigation Overlay Service
FTP File Transfer Protocol
GAGAN GPS Aided Geo Augmented Navigation
GLONASS GLObal NAvigation Satellite System
GNSS Global Navigation Satellite System
GPS Global Positioning System
IMU Inertial Measurement Unit
INS Inertial Navigation System
LED Light Emitting Diode
MFDD Mean Fully Developed Deceleration
MSAS MTSAT Satellite Augmentation System
NMEA National Marine Electronics Association
NTRIP Networked Transport of RTCM via Internet Protocol
PPS Pulse(s) Per Second
RD
R
aw Data (an OxTS file format)
RINEX Receiver INdependent EXchange format
RTK Real-Time Kinematics
SBAS Satellite Based Augmentation System
SDCM System for Differential Corrections and Monitoring
SPS Standard Positioning Service
TCP Transmission Control Protocol
TNC Threaded Neill-Concelman
TTFF Time To First Fix
TTL Transistor-Transistor Logic
UDP User Datagram Protocol
VUT Vehicle Under Test
WAAS Wide Area Augmentation System
WGS 84 World Geodetic System 1984
WLAN Wireless Local Area Network
Page 8
Oxford Technical Solutions
8
How do base stations work?
A base station significantly increases the position accuracy of mobile GNSS receivers by
sending them corrections. The base station does this by independently identifying the errors
affecting the signal from each GNSS satellite it can see. Information about those errors is then
broadcast via radio modem or something similar. Other GNSS receivers in the area—which
are also connected to similar radio modems—receive the correction information and take it
into account when calculating their own position measurements. Removing the errors results
in more accurate position estimates.
A base station identifies the errors affecting GNSS signals in one of two ways. If the base
station is placed at a precisely surveyed location, it calculates a GNSS position measurement
in the normal way, then compares that calculated position to the known location. If the
position measurements match exactly, no correction is required. If there is a difference
however, the base station calculates the length of time each satellite signal would need to be
delayed by, in order to cause the difference between the surveyed location and the GNSS
measurement being produced.
Introduction
Thank you for choosing Oxford Technical Solutions.
The GPS-Base is a highly-portable GPS base station that transmits differential corrections to
one or more differential enabled GNSS receivers via radio modem. The position accuracy of
differential and RTK GNSS receivers is improved when using the GPS-Base. The GPS-Base
is available with several different radio options. Different radios are required for license free
operation in different countries.
Four models of the GPS-Base exist, as listed in Table 1. All models are identical in their
operation but are able to track different satellite signals.
Table 1. GPS-Base models
Model
Measurement/Accuracy potential
a
a. Note: The maximum positioning accuracy is determined by the GNSS hardware in the mobile
receiver.
GPS-Base-2 L1/L2 GPS corrections suitable for positioning down to 1 cm accuracy
GPS-Base-2G L1/L2 GPS and L1/L2 GLONASS corrections suitable for positioning down to
1 cm accuracy
Page 9
GPS-Base Manual
Revision: 180928
9
Alternatively, if the base station is not placed at an accurately surveyed location, the only way
for it to estimate the errors is to measure its own position as accurately as possible. It does this
by averaging the GNSS measurements over a period of time before settling on one location.
It then compares all further measurements to that chosen location in order to identify the
errors in the same way as before.
In both cases the base station calculates the errors affecting the signal from each satellite it
can see, and shares that information with other GNSS receivers in the local area. This is
normally achieved using radio modems or via an optional Wi-Fi system. A transmitter
connected to the base station broadcasts corrections, and each GNSS receiver has a modem
attached to it that listens for those corrections.
For RTK (Real-Time Kinematic) carrier-phase measurements, the principle is the same, but
the remote GNSS receiver also has to figure out the difference in the number of carrier-phase
cycles between the GPS-Base and itself. To do this, the GPS-Base measures the carrier-phase
of the signals from each satellite and transmits it to the remote system.
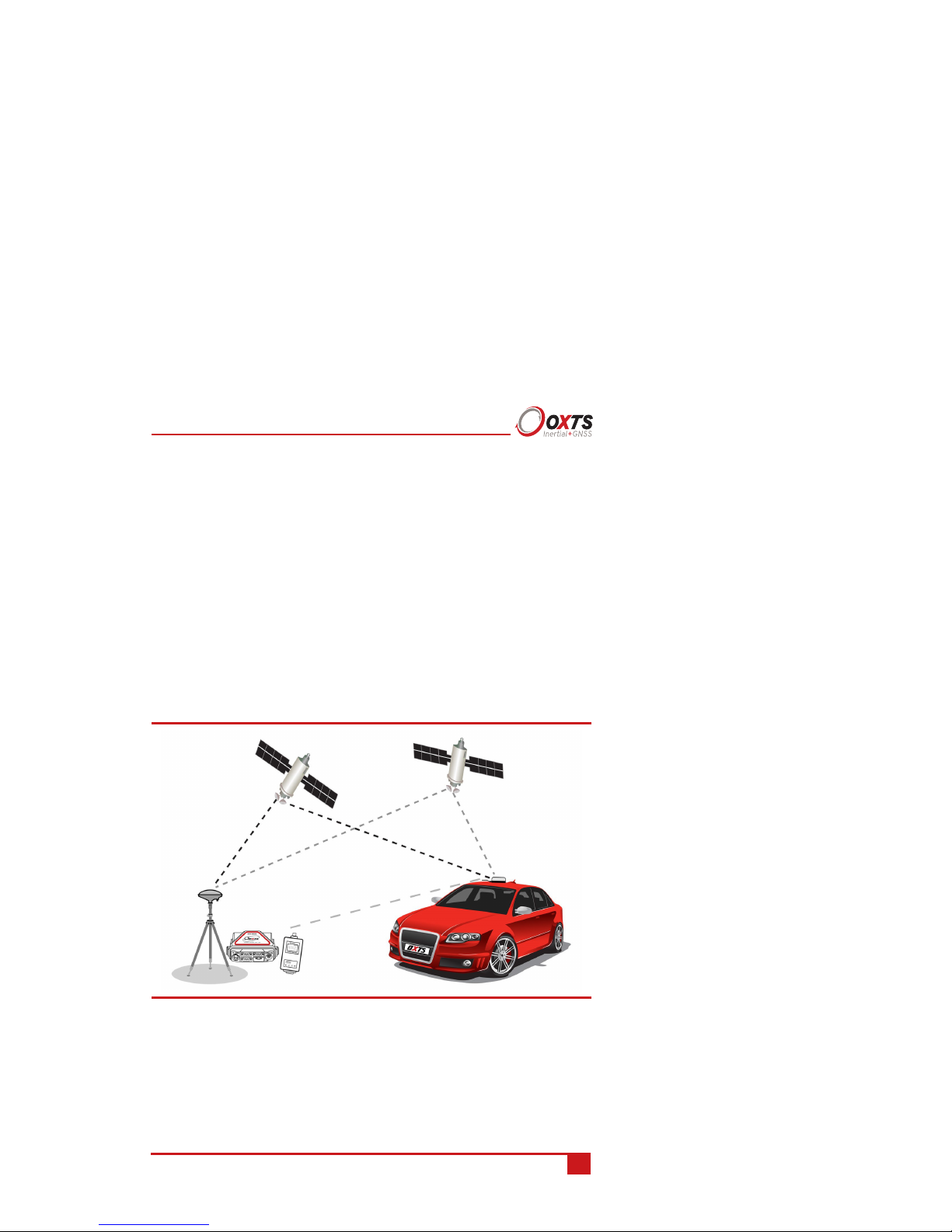
Figure 1.
Differential GNSS overview
The base station is either placed at a precisely known location or left to average its position over time. It can then
estimate the errors affecting each satellite it is tracking and broadcast information about those errors using radio
modems. Nearby GNSS receivers use radio modems to listen for corrections, and apply them to the signals from
the common satellites, reducing the errors in their own position calculations.
Differential GNSS can work in real-time applications because the errors affecting each
satellite vary slowly and predictably. The mobile GNSS receiver in the vehicle uses a model
to predict the error from each satellite. It can update its model when the radio link transmits
Page 10
Oxford Technical Solutions
10
new data. It is not necessary for the mobile GNSS receiver to wait until the radio has
transmitted the correction before outputting its latest value. Depending on the GNSS receiver
in your INS, pseudo-range differential GNSS corrections can be up to 60 seconds old, and
RTK corrections can be up to 30 seconds old.
Transmitting the corrections
Each new GPS-Base is supplied with a pair of radio modems suitable for use in the country
specified when ordered. Typically, these radio modems have a range of 2–5 km line-of-sight.
However, trees, buildings, hills and other obstructions will limit the range that can be
achieved. Table 2 shows the different radios that can be supplied with the GPS-Base.
Please note that the use of the frequency bands 403–473 MHz is not harmonised across
Europe. Please contact OxTS if you require further details on the specific frequency band and
power settings for the radios supplied with your GPS-Base, and in which countries they can
be used.
While the GPS-Base will work seamlessly with our own GNSS-aided INS products, it is not
limited to them in any way. The GPS-Base can also serve as a general base station for other
products. To help achieve this, the GPS-Base transmits corrections inthree common formats:
•RTCA
•RTCA2
•RTCMv3
Table 2. Overview of different radios
Radio Specification
SATEL SATELLINE-EASy
(with display) 403–473 MHz
Up to 1 W, typically 5 km. License free bands available for many
European countries. Radio will typically cover eight bands with
25 kHz channel spacing, except for SATEL Easy radios, which have
a much wider range of configurable frequency
SATEL SATELLINE-EASy
(with display) 869 MHz
Up t o 500 mW, typi call y 2 km . Lic ense f ree a cros s most of Eu ropean
Union. When using a radio in the 869 MHz band in countries or
regions where ETSI EN 300 220-1 is mandated, the option "Limit
output corrections message rate (ETSI EN 300 220-1)" must be
selected in NAVbase
FreeWave FGR2-900 MHz Up to 1 W, typically >10 km. License free in USA, Brazil, Canada
Page 11
GPS-Base Manual
Revision: 180928
11
Correction types
The GPS-Base can transmit differential corrections in one of three different formats as shown
in Table 3. The output type should match one supported by the mobile receiver.
Transmission frequency
The rate at which each message type is broadcast is listed in the tables below. The limited
frequency is automatically selected when the Limit output corrections option is selected in
NAVbase.
Table 3.
Differential correction formats supported by the
GPS-Base
Format Purpose
RTCA The RTCA format is suitable for GPS differential corrections but is not suitable for
GLONASS
RTCA2 The RTCA2 format is suitable for GPS and GLONASS differential corrections
RTCMv3 The RTCMv3 format is suitable for GPS and GLONASS differential corrections
Table 4.
RTCA message output
Message
Standard
frequency
Limited
frequency
a
a. Used when the Limit output corrections message rate (ETSI EN 300 220-1) option is enabled.
RTCAOBS (L1/L2 pseudo-range and carrier-phase) 1 Hz 0.25 Hz
RTCAREF (base station position) 0.2 Hz 0.2 Hz
RTCA1 (pseudo-range corrections) 1 Hz 0.25 Hz
Table 5.
RTCAv2 message output
Message
Standard
frequency
Limited
frequency
a
a. Used when the Limit output corrections message rate (ETSI EN 300 220-1) option is enabled.
RTCAOBS2 (L1/L2 GNSS+GLONASS pseudo-range
and carrier-phase)
1 Hz 0.25 Hz
RTCAREF (base station position) 0.2 Hz 0.1 Hz
RTCA1 (pseudo-range corrections) 1 Hz 1 Hz
Page 12

Oxford Technical Solutions
12
File logging
As well as broadcasting differential corrections, the NAVbase software can log correction
data to the hard disk of the PC when connected. Files can be logged in Novatel binary and
RTCMv3 format.
Table 6.
RTCMv3 message output
Message
Standard update
rate
Limited update
rate
a
a. Used when the Limit output corrections message rate (ETSI EN 300 220-1) option is enabled.
RTCM1004 (extended L1/L2 GNSS pseudo-range and
carrier-phase)
1 Hz 0.25 Hz
RTCM1012 (extended L1/L2 GLONASS pseudo-range
and carrier-phase)
1 Hz 0.25 Hz
RTCM1005 (base station antenna position) 0.2 Hz 0.14 Hz
RTCM1007 (extended antenna descriptor and set-up
information). The base station firmware always configures
the base stati
on antenna as a Novatel GNSS Antenna
0.1 Hz 0.1 Hz
RTCM1033 (base station and antenna descriptor) 0.1 Hz 0.1 Hz
Page 13

GPS-Base Manual
Revision: 180928
13
Scope of delivery
With the exception of a computer running Microsoft Windows, everything you need to utilise
your GPS-Base should be included with the delivery. Please check carefully that everything
shown on the delivery note is present. The following tables list the standard and any optional
components delivered with your product.
Please note:
the customer must check that the supplied radio can be used without a license,
or obtain a suitable license before using the GPS-Base. Oxford Technical Solutions cannot be
held responsible for using this equipment illegally without the correct radio license.
Figure 2.
Example of GPS-Base system
Table 7. Summary GPS-Base components common to all versions
Qty. Description
1 GPS-Base unit
1 15 m TNC-TNC GNSS antenna cable
1 Power cable
1 Radio modem cable
1 PC-USB cable
Page 14

Oxford Technical Solutions
14
1 Transit case
1
Vexxis GNSS-802 antenna
1 Professional tripod
1 GPS-Base user manual
1 GPS-Base Quick Installation Guide
Table 8.
Additional components supplied with SATEL 380–420 MHz radios
Qty. Description
2 SATEL SATELLINE-EASy (with display) radio modem, 380–420 MHz
2 3 m Satel 420 magnetic antenna with TNC connector
Table 9. Additional components supplied with SATEL 869 MHz radios
Qty. Description
2 SATEL SATELLINE-EASy (with display) radio modem, 869 MHz
2 3 m Satel 869 magnetic antenna with TNC connector
Table 10. Additional components with Freewave radios
Qty. Description
2 Freewave FGR2-900 MHz radio modem
2 3 m Satel 869 magnetic antenna with TNC connector
2 Freewave FGR2-900 converter cable (short)
Table 7. Summary GPS-Base components common to all versions (Continued)
Qty. Description
Page 15

GPS-Base Manual
Revision: 180928
15
Conformance notices
Any use or misuse of the GPS-Base, in a manner not intended by OxTS, may impair the
protection provided.
The GPS-Base complies with the radiated and conducted emission limits for CISPR 25 Level
2 and Class B of Part 15 of the FCC rules, and with the radiated emission and immunity limits
for Class B of EN 61326. These limits are designed to provide reasonable protection against
harmful interference in a residential installation.
This equipment generates, uses and can radiate radio frequency energy and, if not installed
and used in accordance with the instructions, may cause harmful interference to radio
communications. However, there is no guarantee that interference will not occur in a
particular installation. If this equipment does cause harmful interference to radio or television
reception, which can be determined by turning the equipment off and on, the user is
encouraged to try to correct the interference by one or more of the following measures:
• Re-orient or relocate the receiving antenna
• Increase the separation between the equipment and the receiver
The GPS-Base conforms to the requirements for CE.
Regulatory testing standards
• EN 55025
• CISPR 25 Level 2
• EN 61000-4-2
• EN 61000-4-3
• EN 55001 (EN 61326) Class B
Page 16

Oxford Technical Solutions
16
Operation
The GPS-Base has been designed to be as easy to operate as possible. However, it is
important to have a sound understanding of how the system works, so please read the manual
thoroughly before operating the product.
The set-up procedure is summarised below. More detailed information on each step is also
presented in the following sections.
Process of setting up the GPS-Base:
1. Select a stable, suitable location for the GNSS antenna.
2. Connect all cables and then power up the system.
3. Configure the system, if required.
4. Download and convert the data if required.
General precautions
• The GPS-Base unit should not be left in the rain or other wet conditions.
• Ensure the antenna is not affected by gusts of wind—such as when vehicles pass.
• Never extend or shorten the GPS antenna cable. The loss in the cable is carefully
matched to the GPS-Base and lengthening or shortening the cable will reduce
the performance of the system.
• Never connect the GNSS antenna to the radio aerial connector, which uses the
same connector. The use of two TNC connectors is required since they have
much better ground properties compared to BNC connectors. The radio aerial
output has a high-power signal that may damage the GNSS antenna.
Selecting a suitable antenna location, and setting up the tripod
For the GPS-Base to work to specification, it is essential to put the antenna in a location
where it has a clear view of the sky. GNSS antennas do not only look for satellites from
above, they also receive signals from the side-down to an elevation of about 10° in all
directions. For that reason, it is important to place the antenna in the most open location
available to you.
One error that no base station can easily correct for are multi-path reflections from buildings
and trees. To avoid these, do not locate the antenna near trees and buildings, or other tall hard-
Page 17

GPS-Base Manual
Revision: 180928
17
structures. It is also very important that the antenna does not move during the test. Ensure the
supplied tripod is stable enough not to move in the wind and that no one can bump into it.
When performing vehicle tests, consider gusts of wind that may be created by passing
vehicles.
Figure 3.
Choosing a location for the GNSS antenna
Choose a location for the GNSS antenna that is not close to buildings or trees, as these can both affect GNSS
signals. The antenna needs to have a good view of the sky (not just above, but to the sides too).
If you intend to perform a test over several days, and will be packing the base-station away
overnight, it is important to mark the location of the GNSS antenna. It will need to be placed
in precisely the same location on each day. If possible, mount the antenna on a pole that has
been fixed in the ground and can be left behind until the test has finished.
Setting up the tripod and antenna
1. The tripod legs use a friction lock to maintain their position. To extend each leg,
twist each leg axially in an anti-clockwise direction (viewed from below) to
unlock the leg. Ensure each section is re-locked in position by axially twisting it
in a clockwise direction. It doesn't matter how high the GNSS antenna is located,
as long as it has the best possible view of the sky.
2. Carefully remove the GNSS antenna from the GPS-Base case. The antenna is
attached to the tripod via the threaded section. Do not apply excessive force
when tightening the antenna.
Page 18

Oxford Technical Solutions
18
3. Ensure the tripod and antenna are located in a safe position and there is no
chance they can move or fall over.
Connecting the GNSS antenna and radio modem cables
Before powering up the GPS-Base, the GNSS antenna should be connected to the GNSS
connector using the supplied GNSS cable.
Figure 4.
GPS-Base cable connections
As shown above, the GNSS antenna connects to the left of the handle and the radio modem connects to the right.
Do not swap the connectors over or damage may occur.
If radio modems are being used to transmit and receive DGNSS corrections, one of the
supplied antennas should be connected to the Radio connector. The radio modem antenna
should be placed as high up as possible (to ensure good range is achieved), but should be
located at least 20 centimetres from the GNSS antenna.
Page 19

GPS-Base Manual
Revision: 180928
19
Powering up and monitoring the GPS-Base
Please note that a number of factors affect the time taken for the GPS-Base to acquire
satellites. The process normally takes about 90 seconds, but can take up to 20 minutes if the
unit has been turned off for a long period of time or has been moved a significant distance
since last time it was used.
The first thing the GPS-Base loads as part of the boot process is a configuration file, which is
held in its internal memory. The configuration file controls how the GPS-Base behaves. The
first time an GPS-Base is powered up after delivery, the default settings are used. The default
settings tell the GPS-Base to average its position over a three-minute period (once it
computes a GNSS position) and to broadcast corrections in RTCMv3 format. The base
station ID will be set to OxTS.
Creating custom configurations using our NAVbase software is covered in the next section.
Page 20

Power LED Description
LED Label LED State Description
PWR
Green solid Operational mode
Yellow solid In process of booting
Red solid
Error, for example, invalid receiver AUTH code
Firmware/Web UI update in progress
GNSS LED Description
LED Label LED State Description
GNSS
(indicates the position
status of the receiver)
Green solid PPP Solution
Green slow blink RTK integer ambiguity
Green fast blink Single point or SBAS position
Yellow solid No solution
Yellow blink
User Accuracy Level (UAL) out of bounds
(STEADYLINE)
If PwrPak7 configured as Base
Green solid Fixed position
Yellow solid Pending fixed position
Yellow blink Invalid fix
Hardware LED descriptions
INS LED
Description
LED Label LED State Description
(INS indicates the INS
status of the receiver
(PwrPak7-E1 or
PwrPak7 using an
external IMU only)
Off INS inactive
Green solid INS solution good
Green slow blink INS alignment complete
Green fast blink INS solution free
Green/Yellow alternating blink High variance
Yellow solid INS aligning/determining orientation
Red solid Error
Oxford Technical Solutions
20
Page 21

GPS-Base ManualGPS-Base Manual
Revision: 180928
21
USB TRANSFER LED Description
LED State Description
Green solid Stick plugged in, no activity
Green slow blink Logging to stick with lots of available memory
Green fast blink Transferring files to stick with lots of available memory
Green/Yellow alternating blink Logging to stick but low available memory
Yellow solid Stick plugged in but low available memory
Yellow fast blink Stick mounting or unmounting/busy
Red solid Stick plugged in memory full
Red fast blink for 3 seconds
then Red solid
Stick mount error:
Stick plugged in but corrupt or unsupported format
Off No connection to the TRANSFER port or stick is unmounted
LOG LED and Button Description
LOG
Button
with LED
LED State Description
Logging
Green slow blink Logging to Internal (lots of memory available)
Green solid Internal logging stopped (lots of memory available)
Green/Yellow alternating blink Logging to Internal (low memory)
Yellow solid Internal logging stopped (low memory)
Yellow fast blink Memory is mounting or unmounting/busy
Off PwrPak7 is connected to a PC as a mounted device
Push Button
Error
Red fast blink for 3 seconds
then Red solid
Not enabled, memory full or corrupt, unsupported file
system
Page 22

Oxford Technical Solutions
22
Communicating with the product
Our NAVbase software, which is supplied with the GPS-Base, is used to configure the
product and monitor its operation. Using NAVbase you can:
• Average base-station location
• Enter base-station location, if known
• Restore a saved base-station location
• Program a location in to the GPS-Base so it will use it after power is removed
and restored
• Set the base-station identifier GPS-Base
• Change the format of the corrections
• Monitor the status of the GPS-Base
• Save differential correction data to disk
To communicate with the GPS-Base the NAVbase software needs to know which "port" the
GPS-Base is connected to. The GPS-Base connects using USB, but the USB drivers makes
the GPS-Base appear as a serial COM port. Normally the driver will install three COM ports
for the GPS-Base: COM5, COM6 and COM7. Any of these can be used. If these ports are
taken by other software drivers then other ports will be used and it will be necessary to
"search" until the correct port is found.
The GPS-Base automatically scans all the available ports on start up and only lists the ports
where a valid GPS-Base has been detected.
Page 23

GPS-Base Manual
Revision: 180928
23
The NAVbase interface
NAVbase can be started by clicking the Start button and typing
navbase
, or by clicking
Start
>
All Programs
>
OxTS
and selecting
NAVbase
. The initial launch screen is shown in
Figure 5.
Product Selection
As NAVbase is our universal base station configuration tool, the first task is to tell the
software which base station is about to configured. Simply select GPS-Base and click the
Next
button. You will notice that different options are available depending on the product
selected.
Figure 5.
The initial screen presented by NAVbase
Select the GPS-Base and click Next.
Page 24

Oxford Technical Solutions
24
Connection
Figure 6.
NAVbase Connection page
The Connection page is used to specify which port NAVbase should use to communicate with
the GPS-Base. If the GPS-Base was not connected when the software was run press the
Scan
Ports
button to rescan the ports and find the GPS-Base.
Remember port selection
If the Remember port selection option is checked, then in future the software will skip the
port scan. Normally the GPS-Base will remain on the same port so it is not necessary to visit
this page each time. If the GPS-Base cannot be found on the saved port, NAVbase will scan
all the ports, which can take time. It is best to have the GPS-Base on and connected before
starting the software.
Settings
Before the GPS-Base will output corrections it needs to know the position of the GPS
antenna. This can be restored from a file (i.e. using a position that has been saved), it can be
Page 25

GPS-Base Manual
Revision: 180928
25
restored from the GPS-Base, it can be entered by the user or the GPS-Base can average its
position for a period of time to find an approximate location for the antenna.
There is some discussion at the end of the manual describing the benefits of each technique.
In general it is sufficient to average for three minutes. For repeatable work, save the averaged
location, and then restore this location using the
Restore from file
feature. To be accurate to
a map it will be necessary to average for a long period of time (and hope that the person who
made the map did this too, which they may not have).
Figure 7.
NAVbase Settings page
Averaging time
Use this option to let the GPS-Base find its own position using GPS measurements. This is
the most common option to use. For temporary installations, a three minute period is
sufficient. Longer periods can be used to find the location of the antenna more precisely.
Note: if you average for three minutes then all the data for this average will be accurate to
2 cm compared to other data obtained during this average. If you re-average you will end up
in a different location and the data from the new location will not overlay the old location.
Use the Save/Restore features so that future data will overlay the current data.
Page 26

Oxford Technical Solutions
26
Restore position from file
If you have saved the location of the GPS antenna to a file then you can restore that file using
this option. This guarantees repeatable data if you can locate the GPS antenna in exactly the
same location each time. The GPS-Base can also store an antenna location internally, this will
be explained in the "Save Position To GPS Base" section.
Enter antenna position
If you know the position of the GPS antenna then you can enter it using this option. The
position of the antenna might be known by writing down a previous location (rather than
saving it to disk) or if a professional surveyor has measured the position of the GPS antenna.
Note that the altitude must be entered in EGM96, not WGS-84.
Leave unchanged
Use this option if the GPS-Base already knows its location and you do not want to change it.
If the GPS-Base has a location stored internally, or a location has already been acquired
during the session, this option will be selected automatically.
Advanced
Using
Advanced,
the correction type and the Base Station ID can be set. This is an identifier
that is transmitted with the corrections so that the mobile GPS receiver knows which basestation is sending corrections. Figure 8 shows the Advanced page.
Figure 8.
Advanced settings page
The GPS-Base supports RTCA, RTCA2 and RTCMv3 corrections (RTCMv3 is the default).
More detailed information about these formats is available in the section called "Differential
correction format details". Is there a differential correction section?
Page 27

GPS-Base Manual
Revision: 180928
27
By default the GPS-Base will transmit "OxTS" as the Base Station Identifier.What does the
Use GPS settings button do?
Limit output corrections message rate (ETSI EN 300 220-1): This option reduces the rate at
which GPS-Base corrections are output to prevent overloading radio modems (such as the
SATELLINE-EASy 896: firmware version 3.63.4 onwards) that comply to the 10% duty
cycle restriction imposed by ETSI EN 300 220 1.
Status page
The Status page is used to monitor the GPS-Base. The GPS-Base does not need the PC
software to be running continuously, once the GPS-Base is configured then the PC can be
disconnected (unless it is being used to log data). Figure 9 shows the Status Page.
Figure 9.
GPS-Base status page
Status
The status parameter shows the status of the GPS-Base and the software. Valid values for this
parameter are listed in Table 11.
Page 28

Oxford Technical Solutions
28
Communication
The Communication value will change to show that the computer and the GPS-Base are
communicating. In normal operation none of the other values change and this field is useful
to show that the GPS-Base is still communicating correctly.
Latitude, longitude, altitude
These measurements show the location that the GPS-Base believes the antenna is at.
Base Station ID
This field shows the Base Station ID that the GPS-Base is currently transmitting. When this
is blank then no ID has been set.
Logging Novatel binary
If the software is configured to log Novatel binary data to disk (for use with GPS postprocessing software) then the value will show the size of the file. Otherwise, if logging is not
active, it will show "Off".
Table 11.
Description of the status parameters
Va lu e Description
Not Connected The GPS-Base software cannot find a GPS-Base to communicate with on the
selected port. Return to the Connectio n page to sele ct a different port or connect
a GPS-Base to the computer
Averaging The GPS-Base is averaging the GPS positions
RTCA OK This is the normal mode for the GPS-Base when it is working correctly and
outputting RTCA corrections
RTCA2 OK This is the normal mode for the GPS-Base when it is working correctly and
outputting RTCA2 corrections
RTCMv3 OK This is the normal mode for the GPS-Base when it is working correctly and
outputting RTCMv3 corrections
Idle The GPS-Base is idle. To change from this mode the GPS-Base needs to know
the position of the GPS antenna. Return to the Configuration page to set the
location of the GPS antenna
Interrogating In this mode the software is trying to communicate and establish the mode of the
GPS-Base. This mode should not last long
Integrity Warning This occurs when the GPS receiver disagrees with the position that is being used.
Check that the antenna location corresponds to the position that has been entered
or that the file used to save the GPS antenna location is correct
Error There is some error. It is probably best to restart the software and the GPS-Base
Page 29

GPS-Base Manual
Revision: 180928
29
Logging RTCMv3
If the software is configured to log RTCMv3 data to disk then the value will show the size of
the file. Otherwise, if logging is not active, it will show "Off". Currently OxTS software does
not support this format for post-processing but may use it in the future.
Save position to file
Use this option to save the current location of the GPS antenna to a file. The file can later be
restored.
To use the save position feature it is also necessary to be able to replace the GPS antenna to
exactly the same position each time. A 1 cm difference in the location of the GPS antenna
will result in a 1 cm difference in the location of the remote measurements.
Save position to GPS-Base
Use this option to store the current antenna location internally on the GPS-Base. When a
location is stored in the GPS-Base, there is no need to re-configure it every time it is used.
Simply turn the GPS-Base on, without connecting it to a computer, and it will start
transmitting corrections using the saved antenna location and differential correction format.
When using this feature it is necessary to replace the GPS antenna in exactly the same
position each time. Only one antenna location can be stored on the GPS-Base, if a new
location is stored it will overwrite the old one.
To find out which antenna location is stored in the GPS-Base, it must be connected to a
computer and the software must be used. If there is a location stored on the GPS-Base,
"Leave Unchanged" will automatically be selected on the Configuration page. This option
will display the location stored in the GPS-Base on the Status page.
If the position of the antenna is re-averaged or if a new position is sent, any location stored on
the GPS-Base will be erased. After averaging or sending a new position, it will be necessary
to save the position to the GPS-Base.
Save setting to GPS-Base
While the GBS-Base is averaging the "Save Position To GPS-Base" function will change to
"Save Setting To GPS-Base". Instead of saving the position to the GPS-Base this will instruct
the GPS-Base to average a new position when it is turned on. This can be useful so that the
GPS-Base works without a PC connected and averages its position when it is turned on. It
will then output the differential corrections when it has finished averaging.
Page 30

Oxford Technical Solutions
30
Start logging
Use this option to start logging the raw GPS measurements from the GPS-Base. Once started
the "Start Logging" button will become "Stop Logging" which will stop the logging of the
raw GPS measurements when pressed. While logging it is not possible to change page or quit.
Page 31

GPS-Base Manual
Revision: 180928
31
Freewave radio status
This section only applies to the Freewave radio option. When operating the radio modems, it
is sensible to check that the signal is being transmitted correctly and received correctly.
The table below gives some combinations of the LEDs and describes their significance.
With the Freewave modems, if the "CD" LED is red then the radio has not detected any other
radios and it will not transmit or receive from them. This can be seen on both the base and the
Table 12. Satel radio LED states and meanings
LEDs
Description
RTS CTS TD RD CD
Off Red Off Off Off Idle
Off Red Red Off Red Transmitting a packet
Off Red Off Off Orange Noise or other transmission on this frequency
Off Red Off Green Green Receiving a packet
Table 13. Freewave radio LED states and meanings
Condition
Base-station modem Mobile modem
Carrier
Detect
(CD)
Tra ns mi t
(TX)
Clear to
Send
(CTS)
Carrier
Detect
(CD)
Tra ns mi t
(TX)
Clear to
Send
(CTS)
Powered No
link
Red Slow red
flash
Red Off Red flash
Linked
Sending data
Red Slow red
flash
Green
Setup Mode Green Green Green Green Green Green
LED status
Some of the radios provided with the GPS-Base have LEDs that show what the radio is
doing.
SATEL radio status
This section only applies to the SATEL radio option. The GPS-Base will start outputting
corrections when the antenna location has been found or entered. When transmitting
corrections, the LEDs on the SATEL modem will be as shown in Table 12.
Page 32

Oxford Technical Solutions
32
mobile units since the Freewave radios use their bi-directional communication to form a more
secure link. It can be difficult on the mobile unit to know if data is being received since only
a transmit LED is available. If differential corrections are not being received by the INS/
GNSS product, then check that the differential correction format on the GPS-Base and on the
INS/GNSS product are the same.
Page 33

GPS-Base Manual
Revision: 180928
33
Differential correction message format
There are a number of different standards for the differential corrections which will improve
the position accuracy of moving GNSS receivers. The GPS-Base supports several differential
correction formats.
Please note:
By default, the GPS-Base uses the RTCMv3 standard for transmitting its
differential corrections. You do not need to change the differential correction format unless
you have a GLONASS-capable equipment and a GLONASS base station.
Message output and frequency:
Table 14.
RTCA message output
Message
Standard
frequency
Limited
frequency
a
a. Used when the Limit output corrections message rate (ETSI EN 300 220-1) option is enabled.
RTCA1 (pseudo-range corrections) 1 Hz 0.25 Hz
RTCAOBS (L1/L2 pseudo-range and carrier-phase) 1 Hz 0.25 Hz
RTCAREF (base station position) 0.2 Hz 0.2 Hz
Table 15.
RTCAv2 message output
Message
Standard
frequency
Limited
frequency
a
a. Used when the Limit output corrections message rate (ETSI EN 300 220-1) option is enabled.
RTCA1 (pseudo-range corrections) 1 Hz 1 Hz
RTCAOBS2 (L1/L2 GNSS+GLONASS pseudo-range
and carrier-phase)
1 Hz 0.25 Hz
RTCAREF (base station position) 0.2 Hz 0.1 Hz
Table 16.
RTCMv3 message output
Message
Standard update
rate
Limited update
rate
a
RTCM1004 (extended L1/L2 GNSS pseudo-range and
carrier-phase)
1 Hz 0.25 Hz
RTCM1005 (base station antenna position) 0.2 Hz 0.14 Hz
Page 34

Oxford Technical Solutions
34
RTCM1007 (extended antenna descriptor and set-up
information). The base station firmware always
configures the base station antenna as a Novatel GNSS
702 GGL
0.1 Hz 0.1 Hz
RTCM1012 (extended L1/L2 GLONASS pseudo-range
and carrier-phase)
1 Hz 0.25 Hz
RTCM1033 (base station and antenna descriptor) 0.1 Hz 0.1 Hz
a. Used when the Limit output corrections message rate (ETSI EN 300 220-1) option is enabled.
Table 16.
RTCMv3 message output
(Continued)
Message
Standard update
rate
Limited update
rate
a
Page 35

GPS-Base Manual
Revision: 180928
35
Repeatability
Differential corrections change the way a GNSS receiver works. When using differential
corrections, the GNSS receiver is effectively measuring the position relative to the base
station, not the absolute position on earth. This leads to several effects that the user should be
aware of:
1. If the base station antenna is moved, then the remote GNSS receivers move too.
It is important to put the GNSS antenna in a location where it cannot move or be
moved. See Figure 10.
2. The base station has to measure its own position. If the base station gets this
position wrong, then the remote GNSS receivers will also be wrong. They will
be correct relative to the base station, but they will have the same error on the
earth that the base station has. This is important when turning the GPS-Base off
and on again. See Figure 11.
Figure 10.
Shifting base station antenna example
The problem of shifting the antenna typically occurs when:
• The tripod is knocked over and picked up again. It is hard to get the antenna back
to the same location accurate to 1 cm.
• If the GPS-Base is used one day, packed up then returned to the same location
the next day. It is very hard to replace the tripod in the same location. It is better
to have a pole that is fixed to the ground if you intend to use the same surveyed
location on several days.
Page 36

Oxford Technical Solutions
36
Figure 11.
Averaging to a different position example
The problem of averaging to a different position happens each time that the GPS-Base goes
through its averaging process. There is nothing magical about the GPS-Base that allows it to
get its own position accurate to 2 cm or better. It is subject to the same errors that all GNSS
receivers have and can only average its position to about 1.8 m CEP.
If the user is prepared to wait a long time (typically more than 24 hours) then GNSS is able to
improve the accuracy of the base station antenna so it is accurate to 2 cm or better. However,
since the timescale for this is long it is not usually practical, except for permanent
installations. (Even when you have a permanent installation it is not required since all it does
is allows you to relate your measurements to a surveyor's measurements and this is rarely
required).
To overcome the problem of averaging, the save/restore feature of the GPS-Base should be
used. When using the Save/Restore feature the GPS-Base will save the position where it last
averaged and then use this next time (instead of averaging again). This way the error is the
same each time and the repeatability is perfect. You must remember to put the antenna in the
same location each time, accurate to 1 cm or better, when using the Save/Restore feature.
Page 37

GPS-Base Manual
Revision: 180928
37
Specifications
The technical specification for the GPS-Base unit is shown below.
Table 17. Technical specification (excluding radio modem)
Parameter Specification
Power
9–36
V dc, 2 W
Operating temperature
Corrections
Frequency
Format
-40 °C to
75 °C
RTCA (Differential, L1, L2), RTCA2, RTCMv3
1Hz
RS232
Page 38

Index
38
Index
A
average 19
averaging process 34
B
boot process 19
C
Carrier-phase 9
configuration tool 21
custom configurations 19
D
Differential GNSS 9
H
Harmonised 10
L
license 13
M
multi-path 16
N
NAVbase 21
P
Pseudo-range 10
R
Radio modems 9
Repeatability 33
RTCA 10, 11, 31
RTCA2 10
RTCAv2 11, 31
RTCMv3 10, 12, 31
RTK (Real-Time Kinematic) 9
S
save/restore 34
Specifications 35
T
tripod 17
W
Wi-Fi 9
 Loading...
Loading...