

Oxford Instrucments ITC503 Owner's Manual

Operator’s Handbook
ITC503
Temperature controller
Issue 4
April 2000
File reference: ITC503-4.DOC
Oxford Instruments
Superconductivity
Tubney Woods, Abingdon,
Oxon, OX13 5QX, England
Tel: +44 (0)1865 393 200
Fax: +44 (0)1865 393 333
E-mail:superconductivity@oxinst.co.uk
www.oxford-instruments.com

Contents
1 Safety.........................................................................................................................5
1.1 Protective Ground ...................................................................................... 5
1.2 Repair and Adjustment .............................................................................. 5
2 Introduction .............................................................................................................. 6
2.1 Use of this Manual...................................................................................... 6
2.2 Description of ITC
503
................................................................................. 6
3 Installation ................................................................................................................ 8
3.1 Supply Connections .................................................................................... 8
3.2 Heater and Sensor Connections................................................................. 8
3.3 RS232 Serial Data Line Connections .......................................................... 9
3.4 The Oxford Instruments ISOBUS .............................................................. 10
3.5 GPIB (IEEE-488) ......................................................................................... 10
3.6 The GPIB to ISOBUS Gateway .................................................................. 11
3.7 Auxiliary Port Connections....................................................................... 11
3.8 Analogue Output ..................................................................................... 13
3.9 ITC heater control board.......................................................................... 13
3.10 Room Temperature Thermocouple ......................................................... 14
3.11 Use of RT Reference with Channel 1 ....................................................... 14
3.12 Use of RT Reference with Channels 2 & 3 ............................................... 15
4 Local Operation ...................................................................................................... 16
4.1 Front Panel Controls................................................................................. 16
4.2 First Time Operation................................................................................. 19
4.3 Sensor Selection........................................................................................ 19
4.4 Setting a Desired Temperature................................................................ 19
4.5 Manual Heater Control ............................................................................ 19
4.6 Automatic Heater Control ....................................................................... 20
4.7 Manual Setting of P, I and D Control Terms ........................................... 20
4.8 Automatic Setting of P, I & D Control Terms .......................................... 22
4.9 Gas Flow Control ...................................................................................... 22
4.10 Cryocooler Control ................................................................................... 23
4.11 Use with OP3KW MkII .............................................................................. 23
4.12 Test Mode ................................................................................................. 23
5 Limits ....................................................................................................................... 25
5.1 Limiting Maximum Heater Output.......................................................... 25
5.2 Limiting Sensor Temperatures ................................................................. 25
5.3 Limiting Set Temperature ........................................................................ 26
5.4 System Over-Temperature ....................................................................... 26
5.5 Limiting Display Resolution ..................................................................... 26
5.6 Storing Limits and other Power-Up Defaults .......................................... 27
5.7 Temporarily Disabling Sensor Temperature Limits................................. 27
6 Sweep ...................................................................................................................... 28
6.1 Purpose of Sweep..................................................................................... 28
6.2 Starting a Sweep....................................................................................... 28

6.3 Monitoring the Progress of a Sweep....................................................... 28
6.4 Stopping a Sweep..................................................................................... 29
6.5 Programming the Sweep ......................................................................... 29
6.6 Storing a Sweep Program ........................................................................ 30
7 Calibration and Configuration............................................................................... 31
7.1 Sensor Calibration .................................................................................... 31
7.2 Storing the Calibration............................................................................. 32
7.3 Gas Flow and Cryocooler.......................................................................... 32
7.3.1 Adjusting the Valve Gearing.................................................. 33
7.3.2 Adjusting the Gas Flow Parameter ........................................ 33
7.3.3 Adjusting the Error Sensitivities............................................. 34
7.3.4 Adjusting the Minimum Gas Valve in Auto .......................... 34
7.4 Auto-PID Configuration ........................................................................... 34
7.5 Setting the GPIB Address ......................................................................... 34
8 Remote Operation .................................................................................................. 35
8.1 Introduction.............................................................................................. 35
8.2 Communication Protocols ........................................................................ 35
8.3 Commands and Responses....................................................................... 35
8.4 Numeric Parameters ................................................................................. 36
8.5 Use with Oxford Instruments ISOBUS...................................................... 36
8.6 The GPIB Interface.................................................................................... 37
8.6.1 Sending Commands via the GPIB........................................... 38
8.6.2 Accepting Responses via the GPIB ......................................... 38
8.6.3 The Status Byte, Use of a Serial Poll ...................................... 38
8.6.4 Use of the Service Request Line............................................. 39
8.6.5 Use of the Device Clear Function........................................... 39
8.6.6 Use of the Interface Clear (IFC) Function .............................. 39
8.6.7 Non-Implemented Features of the GPIB ............................... 39
8.6.8 Compatibility with IEEE-488.2................................................ 40
8.6.9 Use of the GPIB Interface as a GATEWAY to ISOBUS ........... 40
8.6.10 Writing a "Rugged" GPIB Control Program.......................... 40
9 Command List ......................................................................................................... 41
10 Command Syntax.................................................................................................... 43
10.1 User Commands........................................................................................ 43
10.2 Specialist Commands................................................................................ 47
11 Sensor Range Configuration .................................................................................. 50
11.1 Introduction.............................................................................................. 50
11.2 Range Data ............................................................................................... 51
11.3 Access to Configuration Controls ............................................................ 52
11.4 Hardware Configuration.......................................................................... 52
11.5 Linearisation Configuration..................................................................... 53
12 Sensor Range Design .............................................................................................. 55
12.1 Introduction.............................................................................................. 55
12.2 Types of Sensor......................................................................................... 55
12.3 Selecting Input Configuration ................................................................. 56

12.4 Selecting Sensor Energisation.................................................................. 56
12.5 Selecting Zero and Span........................................................................... 57
12.6 Calculation and Loading of Linearisation Data ...................................... 57
13 Theory of Calibration and Linearisation................................................................ 58
13.1 Hardware Calibration............................................................................... 58
13.2 Input Software Calibration ...................................................................... 58
13.3 Linearisation ............................................................................................. 58
14 Theory of Control ................................................................................................... 59
14.1 General...................................................................................................... 59
14.2 Open Loop Operation .............................................................................. 59
14.3 On-Off Control.......................................................................................... 59
14.4 Proportional Control ................................................................................ 59
14.5 Integral Action.......................................................................................... 60
14.6 Derivative Action...................................................................................... 61
14.7 North American Terminology .................................................................. 61
14.8 Theory of Gas Flow Control ..................................................................... 61
15 Servicing .................................................................................................................. 64
15.1 Circuit Description .................................................................................... 64
15.2 Test Mode ................................................................................................. 66
16 In Case of Difficulty ................................................................................................ 67
17 Differences Between ITC
503
and ITC4................................................................... 70
18 Specification............................................................................................................ 72
19 Appendix 1 - Capacitance Sensor Input................................................................. 74
19.1 Description of Capacitance Sensor Input Board ..................................... 74
19.1.1 Features................................................................................... 74
19.1.2 General.................................................................................... 74
19.1.3 Installation .............................................................................. 75
19.2 Connections .............................................................................................. 76
19.3 Use of the Capacitance Sensor Card........................................................ 77
19.4 Calibration ................................................................................................ 77
19.4.1 Calibration when using a "Lin" Range.................................. 77
19.4.2 Calibration when using a "Temperature Display" Range.... 77
19.5 Circuit Description .................................................................................... 78
20 Circuit Diagrams...................................................................................................... 80
Warnings
Before you attempt to install or operate this equipment for the first time, please make
sure that you are aware of the precautions that you must take to ensure your own safety.
Caution
If you change set-up data and want it to be retained after power down, the data must be
deliberately STORED as described in section 5.6.
Oxford Instruments Superconductivity Limited, April 2000. All rights strictly reserved.

5
1 Safety
The following general safety precautions must be observed during the operation, service
and repair of this instrument.
1.1
Protective Ground
To minimise shock hazard the instrument must be connected to an electrical ground. The
ground wire (green/yellow) in the instrument power cable must be connected to the
installation electrical ground system. Do not use extension cords without a protective
earth conductor. Do not disconnect the protective ground inside or outside the
instrument. Do not have external circuits connected to the instrument when its protective
ground is disconnected.
1.2
Repair and Adjustment
Ensure that the instrument is disconnected from the AC power supply (switching off the
front panel POWER switch is not sufficient) before the covers are removed or fuses are
replaced, otherwise dangerous voltages are accessible. Capacitors inside the instrument
and power connector filter, if fitted, may remain charged after removal of AC power.
These should be discharged before starting work.
For fault finding and calibration, the AC Power supply may require reconnection. This
work may only be carried out by skilled personnel who are aware of the hazard involved.

6
2 Introduction
2.1
Use of this Manual
This manual provides operating and service information for the Oxford Instruments
Intelligent Temperature Controller model ITC503.
Sections 1-4 provide essential information and should be read before operating the
instrument for the first time.
The remainder of the manual provides more detail on specific aspects and may be referred
to as required. Section 16 attempts to identify some of the more common operating
pitfalls and may be useful if problems are encountered.
Users already familiar with the ITC4 or ITC502 Temperature Controller, should refer to
Section 17, which lists the differences between these controllers and the ITC503.
Two other short documents are provided and you may find them useful to help you to run
the ITC503:
a) Quick start - ITC502 and ITC503 temperature controllers.
b) Setting up sensors on an ITC5 - How to change the set-up.
2.2
Description of ITC
503
ITC503 is a high performance laboratory temperature controller, with a number of
features specifically intended for use in cryogenic applications. In its most common
application ITC503 will be used to control the temperature of some "sample", the
properties of which are being investigated as a function of temperature. The sample will
have a sensor monitoring its temperature, and a heater and/or some means of cooling,
whereby its temperature may be varied. The whole will normally be surrounded by some
form of thermal insulation to isolate the sample from its environment. In this manual the
term "sample" will be used to refer to any object being controlled and the term "system"
will be used to refer to the complete assembly.
ITC503 is a microprocessor based instrument and is controlled by an operating program
contained in a programmable memory chip (EPROM). This program is referred to as the
ITC503
firmware
. The firmware is coded with a two part number (for example 1.01)
where the first digit indicates a major version of the firmware and the second two digits
cover minor revisions.
The basic ITC503 includes a single input channel for one sensor. A further two
independent input channels may be added for systems with more than one sensor.
For use in cryogenic applications ITC503 can accept a wide range of different temperature
sensors and can provide up to 80W of heating power. In addition it contains internal logic
to drive a motorised valve as a means of controlling sample cooling in a continuous flow
cryostat. ITC503 displays the sample temperature on a four and one half digit display,
covering a range of up to -19999 to +19999 for Centigrade ranges.

7
For cryogenic ranges, temperatures are displayed in Kelvin and the display is able to auto-
range, to display low temperatures to greater precision. With an appropriate sensor
ITC503 can provide a display resolution of 1mK for temperatures below 20K.
Manual operation of the controller is by means of front panel push buttons and associated
status lamps.
Remote computer control and monitoring is possible by means of built-in RS232 (Serial) or
GPIB (IEEE-488) Interfaces, both fitted as standard to ITC503.
The controller incorporates a number of safety features to prevent damage to the system
if a fault should occur in the sensor or the controller itself. Where three sensors are fitted,
all are continuously monitored for over-temperature, irrespective of which sensor(s) are
selected for control and display.
Sensor calibration data and many of the controller operating parameters are held in a
non-volatile memory, which is retained when the controller is switched off.
ITC503 offers automatic selection of appropriate control parameters (PID values) for
operation throughout its working range. These parameters may themselves be "learnt"
for a particular system, by use of ITC503 operating in conjunction with the Oxford
Instruments Object-Bench software, supplied with the instrument.
8
3 Installation
3.1
Supply Connections
Before applying power to the instrument, ensure that the voltage selector on the rear
panel is correctly set for the intended supply voltage.
If necessary, open the voltage selector panel using the slot provided, withdraw the voltage
selector and replace it in the correct orientation for the intended voltage. Check that the
correct fuses are fitted, then close the voltage selector panel.
Fuse ratings are:
100-120v1.6A Type T (Slow Blow)
200-240v0.8A Type T (Slow Blow)
3.2
Heater and Sensor Connections
Connections to the heater and sensor are by means of a 9 way D-socket on the rear panel.
Where more than one input channel is fitted, separate connectors are used for each
channel. The pin connections are the same for each channel and the heater connections
are brought out in parallel on each channel.
Pin connections are:
1 Input High
2 Input Low for Normal Applications
3 Input GND (Linked to pin 2, isolated from supply GND)
4 Current Source +ve
5 Current Source -ve
6 Heater Output +ve
7 Heater Output -ve
8 Input Low for Thermocouples with RT Ref. Junction
9 Chassis Ground
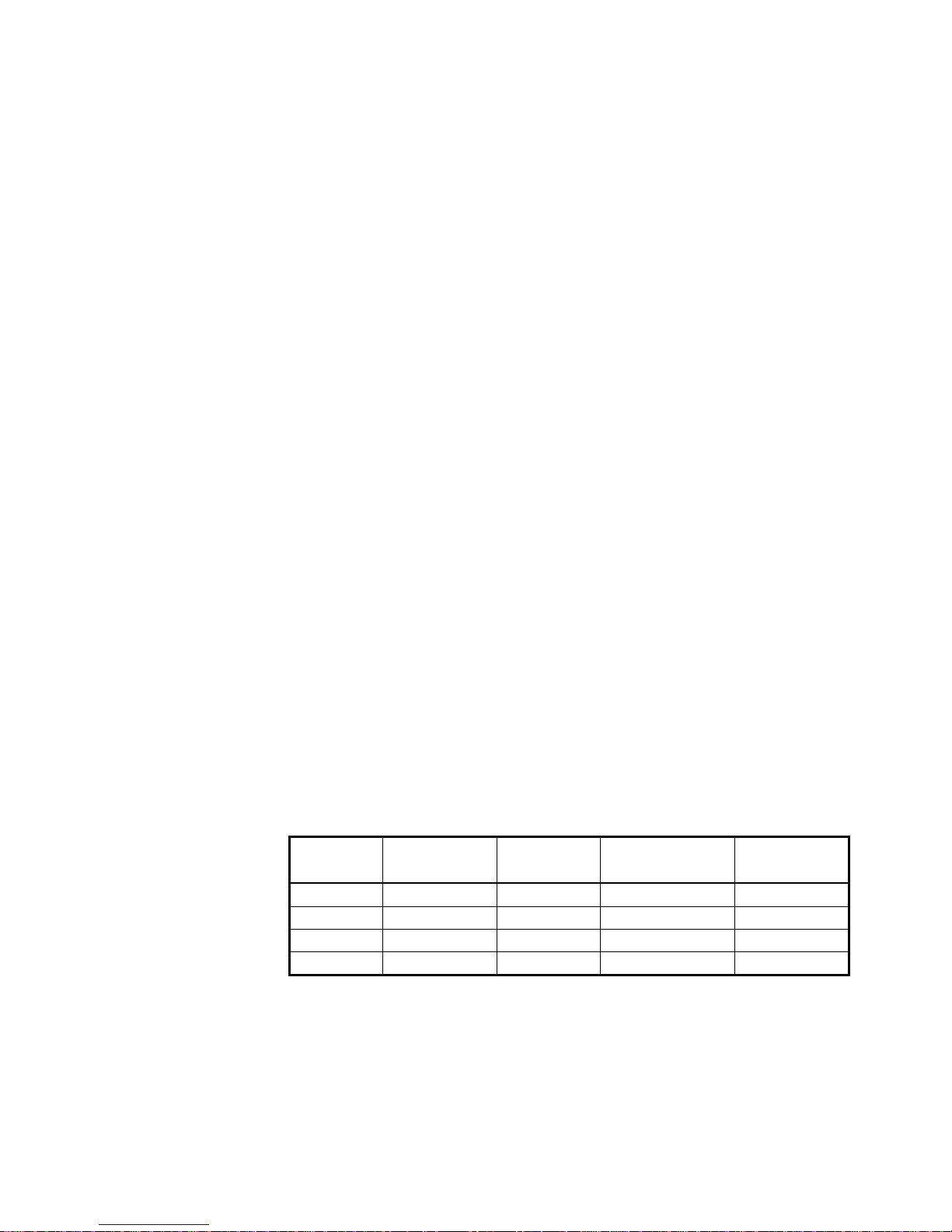
Connections between this socket and the actual sensor will vary with the type of sensor in
use, as shown in the table below.
Thermo-
couple
Metal
Resistor
Ge/Carbon
Resistor
Si/GaAs Diode
Input High V+ V+ V- V-
Input Low V- V- V+ V+
Current +ve n/c I+ I+ I+
Current -ve n/c I- I- I-
Note that the polarity of the voltage input connections is reversed for semiconductor
resistors and diodes. For these sensors, the sensor resistance or sensor voltage falls with
increasing temperature.
9
For some thermocouple ranges a room temperature reference junction may be used. (Not
recommended for cryogenic applications). It is important to note that the room
temperature compensating sensor is mounted at the rear panel of ITC503. To get accurate
compensation it is essential that the thermocouple reference junction is at the same
temperature. This in turn means that the cable linking the sensor to ITC503 must use
thermocouple compensating cable. If the rear panel in the region of the connector is likely
to be exposed to temperature fluctuations, it will be an advantage if a draught shield is
placed around the plug, and the Room Temperature sensor, positioned immediately to its
right.
The Input connections are electrically isolated from the controller ground and the chassis
ground. The Heater Output connections are electrically isolated from the input ground,
the controller ground and the chassis ground. All these connections are capacitatively
coupled to chassis ground with capacitors rated at 50V so should not be taken more than
50V from earth potential.
Where more than one input channel is fitted there is also electrical isolation between
separate input channels.
3.3
RS232 Serial Data Line Connections
The bi-directional serial data link from the computer is connected via a 25 way D-socket on
the rear panel. ITC503 is configured as a DCE with the standard pin outs given below. The
majority of computer RS232 interfaces are configured as a DTE and are fitted with a 25
way D plug. For this type of connector, a simple lead connecting pin 1 to pin 1, pin 2 to
pin 2 and so on is all that is required. For computers fitted with a 9 way D plug for RS232,
(AT style COM port), a standard "AT lead" fitted with a 9 way socket and a 25 way plug is
required.
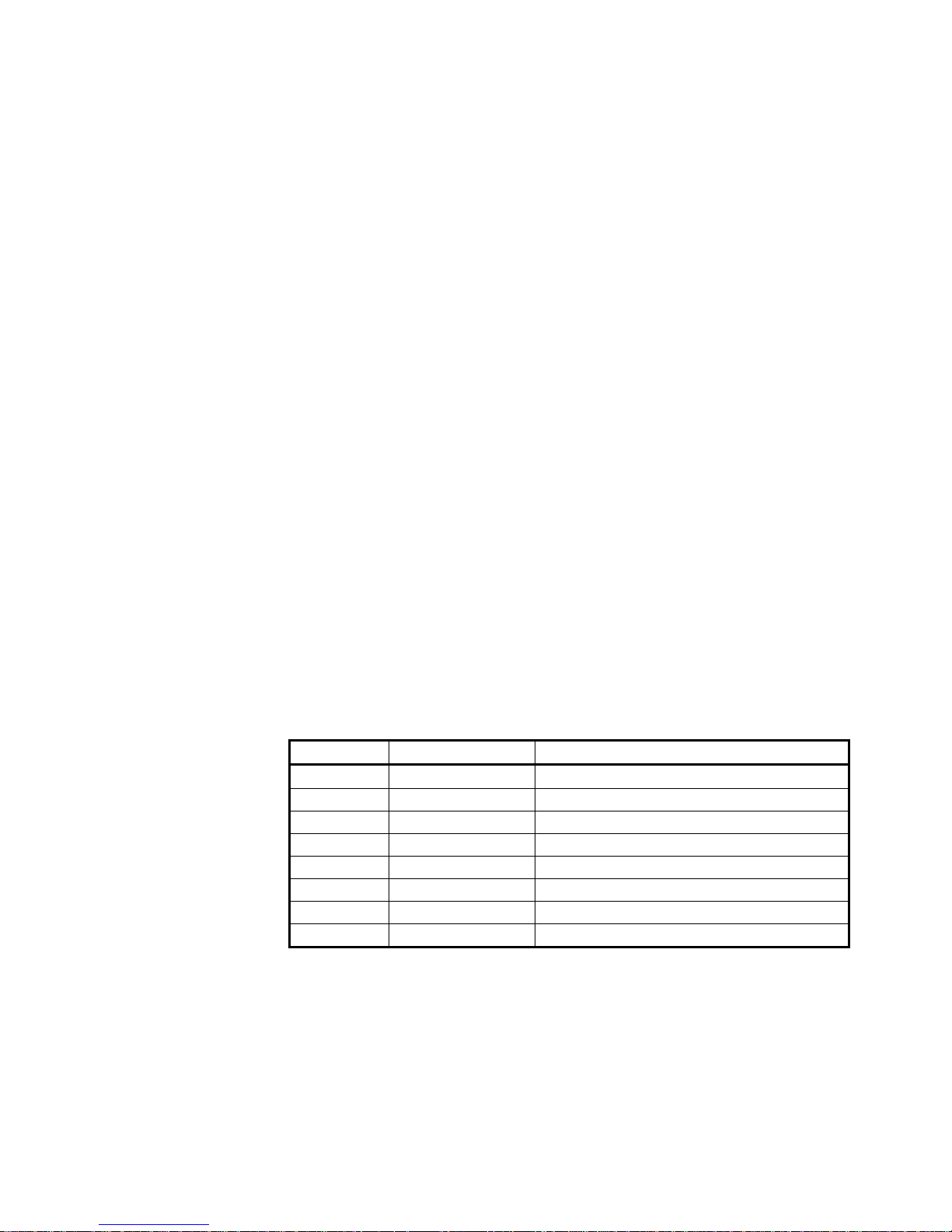
Pin connections at the ITC503 RS232 socket are:
Pin Signal Name Notes
1 FG Linked to Chassis Ground in ITC503
2 TD Data from Computer to ITC503
3 RD Data from ITC503 to Computer
4 RTS Linked to Pin 5 in ITC503
5 CTS Linked to Pin 4 in ITC503
6 DSR Linked to +5V when ITC503 is powered
7 SG Linked to Digital Ground in ITC503
8 DCD Linked to +5V when ITC503 is powered
All other pins are open circuit.
ITC503 does not require signals to be present on any of the "modem control" lines, RTS or
DTR (pin 20). RTS is looped back as CTS and logic high levels are returned on DSR and DCD
to ensure maximum compatibility with any requirement of the computer.
Voltage levels for the transmitted and received data are:

10
Tx Data High > +5.5V
Tx Data Low <-5.5V
Rx Data High Threshold < +2.6V
Rx Data Low Threshold > +1.4V
Max Rx Input Voltage +/-30V
Data protocols are:
Baud Rate 9600
Tx Start Bits 1
Tx Data Bits 8
Tx Stop Bits 2
Rx Start Bits 1
Rx Data Bits 8
Rx Stop Bits 1 or 2
Parity None
3.4
The Oxford Instruments ISOBUS
A unique feature of ITC503 and other Oxford Instruments products, is the ability to
connect a number of instruments simultaneously, to a single RS232 port on a computer
and to control each one independently. This is done by means of an ISOBUS cable which
carries a single MASTER connector (25-way D socket) and up to eight, daisy-chained SLAVE
connectors (25-way D plugs). Each slave connector incorporates full optical isolation so
that the slaves are all isolated from the master and from each other. The slaves connectors
draw their power from the individual instruments, via the DCD signal on pin 8. The master
connector may draw its power from either DTR or RTS signals from the computer.
To use ISOBUS, a special communication protocol is required, which is part of the
command structure of Oxford Instruments' products and is described in section 8.5.
3.5
GPIB (IEEE-488)
Connections to the GPIB are made via a standard 24 way GPIB connector. Assignment of
the connector pins conforms to the standard IEEE-488.1. Connections should be made
using a standard GPIB cable.
GPIB connections should never be made or broken whilst the controller or any of
the instruments connected to the Bus are powered up.
Failure to observe this
precaution can result in damage to one or more instruments.
The GPIB interface complies fully with IEEE-488.1-1987 as a talker/listener, able to
generate service requests and respond to serial poll and device clear commands. It does
not support parallel polling and has no trigger function. Open collector drivers are used
on the bus lines so it does not prevent parallel polling of other devices on the bus. Its
complete GPIB capability is specified by the Capability Identification Codes:-
SH1 AH1 T6 L4 SR1 RL0 PP0 DC1 DT0 C0 E1

11
Two lamps are fitted to the rear panel immediately below the GPIB connector, to assist in
diagnosing any GPIB communication problems. The RED lamp lights whenever the ITC503
is addressed to TALK and the GREEN lamp lights whenever it is addressed to listen. The
behaviour of the lamps is very dependent on the GPIB controller in use. Some controllers
un-address an instrument at the end of any transaction, in which case the lamps will just
blink on for each transaction. Others leave instruments addressed between transactions in
which case one or other lamp may remain lit depending on whether ITC503 was last
addressed to talk or to listen.
Before any communication can occur, ITC503 must be given a unique GPIB address. By
default, ITC503 is supplied with its address set to 24. If this address is already in use by
another instrument on the bus, it can be changed from the front panel via the Test Mode.
This is described in section 7.5.
3.6
The GPIB to ISOBUS Gateway
An ITC503 fitted with a GPIB interface has the ability to act as a GATEWAY to an ISOBUS
cable, allowing other instruments to be linked to the GPIB without themselves requiring
GPIB interfaces. This can enable other Oxford Instruments' products, for which an internal
GPIB interface is not available, to be linked. It offers the additional advantage of optical
isolation between these instruments and the GPIB.
To use the gateway, all that is required is GATEWAY MASTER ADAPTOR. This allows the 25
way ISOBUS MASTER socket to be linked to the 25 way RS232 socket on the ITC502 The
adaptor is a symmetrical 25-way plug to 25-way plug link, with pin connections as shown
below.
N.B. Beware of using 25-way plug to 25-way plug adaptors, sold as "DCE-linkers" by some
suppliers. A variety of different conventions exist for these, not all of which will work as a
Gateway Master Adaptor. The correct adaptor may be obtained from Oxford Instruments.
25 WAY PLUG 25 WAY PLUG
11
23
32
77
64
46
The necessary protocols for use as a Gateway Master are included as standard in ITC503
and are described in section 8.6.5.
3.7
Auxiliary Port Connections
The auxiliary port serves five separate functions.
a) It provides a stepper motor drive and sense input for use with an automatic gas flow
control accessory (AutoGFS). Alternatively it provides a compressor enable signal for
use with a cryocooler system

12
b) It provides an over-ride input to disable the heater output. This is intended for use
with a separate over -temperature cut-out switch and displays the message "Hot 0".
c) It provides a pseudo-analogue temperature output for use with a chart recorder.
(Should be used in conjunction with the Oxford Instruments Chart Recorder output
lead, which incorporates the necessary pull-up resistor and passive filter). A second
pseudo-analogue output mimics the setting of the Gas Control output to control a
variable speed cryohead for use with a cryocooler system.
d) It provides drive signals to one or more external heater select relays for systems with
more than one heater.
e) It provides control signals for the high power output unit OP3KW MkII, if fitted.
Connections to the port are by means of a 15-way D-socket on the rear panel.
The outputs are open-collector transistors (Specification as for ULN2803A) and can sink up
to 500mA from a supply of up to 25 volts maximum. When driving an inductive load, it is
recommended that a diode is connected across the load to absorb the stored energy.
For low power loads, current may be drawn directly from pin 15, which is connected via a
diode and fuse, to the internal unregulated 11 volt line. A maximum total current of
500mA may be drawn from this source.
Heater-2 select relay is energised when controlling on Sensor 2. Heater-3 select relay is
energised when controlling on Sensor 3. Neither relay is energised when controlling on
Sensor 1.
The input lines on the auxiliary socket are suitable for either TTL level inputs or contact
closures to +5v. The input device is a 74HC244 and 100K ohm pull-down resistors to 0v are
fitted.
The AutoGFS sense input on K5, should be linked to +5v when an AutoGFS is connected.
If a thermal shut down device is connected to socket K7, it should be connected such that
an overtemperature will pull the pin above 2.5 volts. The internal 100K resistor may be
shunted by an external resistor, if required to match a sensor characteristic.
Pin connections at the Auxiliary socket are:

13
1 Output Bit 0(Stepper Motor) / Compressor Disable
9 Output Bit 1(Stepper Motor)
2 Output Bit 2(Stepper Motor)
10 Output Bit 3(Stepper Motor)
3 Output Bit 4(Heater-2 Select Relay)
11 Output Bit 5(Heater-3 Select Relay)
4 Output Bit 6(Pseudo-Analogue Gas Control o/p)
12 Output Bit 7(Pseudo-Analogue Temperature o/p)
5 Input K4(Auto GFS Sense)
13 Input K5(Spare)
6 Input K6(Spare)
14 Input K7("Hot 0" Shutdown)
7+5v
15 Driver Protection / +11v unregulated.
80v
3.8
Analogue Output
The pseudo-analogue output on pin 12 of the auxiliary port is intended to drive a chart
recorder for trend monitoring. The pin is alternately pulled to 0v and released with a time
dependent waveform, the mean value of which represents the analogue output. To use
the output, a pull-up resistor should be fitted to a suitable reference voltage (not greater
than 25V). A passive filter with a cut-off frequency of about 1Hz should be connected
between this pin and the chart recorder input. A Recorder Output Lead, including a pull-
up to +5V and a 2 stage passive filter, is available as an optional accessory if required.
The analogue output always indicates the temperature for the current display channel.
Thus the DISPLAY SENSOR button may be used to select any sensor for trend monitoring.
The output is always scaled to cover the full working range of the instrument (0 to
1677.7K)
A second similar output on pin 4 monitors the current position of the gas control valve.
This allows for the use of a variable speed cryohead motor, controlled by the analogue
voltage when ITC503 is used in conjunction with a cryocooler.
3.9
ITC heater control board
The standard ITC, with or without the extra sensor channel interface board (SCI), has a
single heater output. Hence only one heater can be connected and it is not possible to
control a heater change from a computer.
The heater control board allows up to three separate heaters to be connected and these
can be switched, as the sensor is switched, under computer or manual control.
By adding links on the control board, heater outputs can be associated with different
sensor inputs, or with pairs of inputs. For the case where one output is associated with the
three inputs, the heater control board is not required.
14
The heater control board plugs into the rear of the ITC without any modification.
•
it can be retrofitted easily
•
it operates via computer or manual control
•
up to three different heater outputs can be controlled with the three sensor inputs to
the ITC
•
the ITC requires the SCI interface
3.10 Room Temperature Thermocouple
Reference All thermocouples have at least two active junctions. The MEASURING junction
is exposed to the temperature to be measured, whilst the REFERENCE junction is held at a
known reference temperature. For some applications it is convenient to allow the
reference junction to be at Room Temperature (RT Reference). A separate sensor then
monitors room temperature close to the reference junction and compensates for the
effect of room temperature fluctuations. (RT Compensation).
For the highest precision work a fixed reference junction temperature is always preferable.
However in many applications the convenience of an RT reference outweighs the slight
loss of accuracy. In general, RT compensation is suitable for high temperature applications
but
not recommended for cryogenic work
. There are three reasons for this:
a) Thermocouple sensitivity tends to fall at low temperatures so a small RT error will
cause a larger low temperature error.
b) A given temperature error (in degrees) is more likely to be significant at low
temperature than at high temperature.
c) The actual thermocouple wires must be taken all the way from the cryostat to the
controller, since no compensating cable (see below) is available for common cryogenic
thermocouples.
3.11 Use of RT Reference with Channel 1
The essence of accurate RT compensation is to keep the reference junction and the
compensating sensor at the same temperature. ITC503 incorporates an RT sensor on the
rear panel close to the SENSOR 1 connector. Thus the reference junction is assumed to be
made at the connector. This is achieved by bringing the actual thermocouple wires back to
the connector. Alternatively, a suitable thermocouple COMPENSATING CABLE may be
used. This is cable having a thermal EMF which matches the thermal EMF of the actual
thermocouple over a limited temperature range around room temperature. Its advantages
are that it is less fragile than the thermocouple wire and unlike many thermocouples,
need not be made from precious metals.
The ITC503 RT sensor is normally set to provide a 39 µV/degree compensation, which is
correct for Chromel/Alumel and Copper/Constantan thermocouples. Other values of
compensation may be obtained by changing the value of R156 on the input PCB. (Value in
Ohms equals µV/degree).
For use with RT compensation the sensor connections are made to pins 1 and 8, as given in
section 3.2. For best results, the connector and the RT sensor should be enclosed within a
draught shield.

15
When RT compensation is in use, the switch settings for SW1 and SW2 on the input card,
will differ from settings for the same thermocouple with a fixed reference junction
temperature. Section 11.2 lists the settings for a number of common configurations.
3.12 Use of RT Reference with Channels 2 & 3
ITC503 does not have a separate RT sensor for channels 2 & 3 (where fitted). Where RT
compensation is required on only one channel of a multi channel instrument, Channel 1
should be employed for this purpose.
Where RT compensation is required on more than one channel, the Channel 1 RT sensor is
employed for all channels. This is achieved by linking pin 2 on the SENSOR 1 connector to
pin 2 on the SENSOR connector for any other channels requiring compensation. The -ve
connections for
all
thermocouples are then linked to pin 8 of the SENSOR 1 connector,
whilst the +ve connections are taken to pin 1 of the individual SENSOR connectors as
usual. For best results all three connectors and the RT sensor should be within a single
draught shield.
Different Switch settings for SW1 and SW2 as described above, will apply on all channels
where RT compensation is used.

16
4 Local Operation
4.1
Front Panel Controls
The front panel controls are grouped together in logically related blocks.
POWER
The main ON/OFF switch. A green lamp illuminates whenever the instrument is switched
on.
ADJUST
The red RAISE and LOWER buttons provide the main means of adjusting any parameter.
They have no effect on their own but are always used in conjunction with one of the other
buttons. Whenever a parameter is being adjusted, its current value is shown on the main
display. Setting a value involves pressing RAISE and/or LOWER until the required value is
shown.
Operation of the RAISE and LOWER controls has been designed to allow large changes to
be made relatively quickly whilst at the same time enabling any value to be set exactly.
Pressing RAISE or LOWER briefly will cause the value to change by one unit. If the button
is held in, the last figure will start to change at about 5 units per second. After 2 seconds,
an approximately 10-fold increase in rate will occur, followed after further 2 second
intervals by two more rate increases. Altogether there are 4 different rates. Whenever
RAISE or LOWER is released, the next lower speed will be selected. This allows the user to
"home-in" on the required value most ergonomically.
The position of the decimal point in the display will automatically change when the
display auto-ranges.
A secondary use of RAISE and LOWER is in conjunction with LOC/REM, to enter the TEST &
CONFIGURATION mode, as described below.
CONTROL
Control of the instrument may either be LOCAL from the front panel, or REMOTE via the
RS232 interface. The LOC/REM button may be used to switch between LOCAL and
REMOTE.
When LOCK is lit, the instrument is locked into either local or remote control and the
LOC/REM button has no effect. At power up, ITC503is locked in LOCAL, since at that time
the instrument has no way of "knowing" if there is a computer connected to the RS232
interface.
When ITC503 is in REMOTE, many of the front panel controls are disabled. Those controls
which only affect the display, will still work but those which could change the operation
of the instrument will not. If LOCK is lit whilst in REMOTE, all the front panel controls are
inoperative.

17
The LOC/REM control button has a number of secondary SELECT functions which are
obtained by pressing this button whilst one or more other buttons are held depressed. If
LOC/REM is pressed whilst both RAISE and LOWER are held in, ITC503 enters the TEST
mode (described elsewhere). If LOC/REM is pressed whilst the LIMIT button is held in,
current calibration and configuration data is STORED in the non volatile memory and so is
retained at power-up.
PID
When ITC502 is controlling a system, the Proportional, Integral and Derivative settings
may either be set manually or selected automatically from the learnt characteristics of a
particular system by means of the AUTO button. The AUTO lamp illuminates when auto
PID settings are in use. Learning the characteristics of the system is one of the facilities
provided by the Object-Bench program supplied with ITC503. It is not possible to select
auto PID if no learnt data has been loaded.
HEATER
The normal way in which ITC503 effects its control, is by applying power to a heater. In
MANUAL control the heater voltage may be varied by RAISE and LOWER. In AUTOMATIC
control the heater voltage is varied in response to the difference between a measured
temperature and a set-point.
Where more than one sensor is fitted, the SENSOR button may be used to select which
sensor is to be used for control. To avoid an inadvertent change of sensor whilst ITC503 is
controlling, the SENSOR button will only operate whilst the heater is in MANUAL and in
LOCAL control.
In general, sensors mounted on different parts of an apparatus are likely to be at different
temperatures. Hence when switching between control sensors, a change in set point will
be required. ITC503 performs this change automatically. Where control has been
established on one sensor, the optimum set point for the new sensor is the prevailing
temperature for that sensor at the point of switch over. This is the set point that ITC503
selects.
Pressing AUTO or MAN switches between the MANUAL and AUTOMATIC states. In either
case, whilst the button is pressed the main display gives an approximate indication of the
output voltage. (N.B. This is not a calibrated parameter. If a particular requirement needs
an accurate value for the heater voltage, a meter should be connected to the heater
leads). When ITC503 is in REMOTE control, switching between AUTO and MANUAL is
disabled, but it is still possible to use the buttons to display the output voltage, unless
ITC503 is in LOCK & REMOTE.
A 10 segment bar-graph is provided to give a continuous indication of heater operation.
When the maximum heater voltage has been limited (see section 5), the main display will
indicate the actual output voltage whilst AUTO or MAN are pressed. The bar-graph display
will automatically be scaled so that an output on the limit will light all 10 bars.

18
GAS FLOW
A single button, with an associated lamp, allows AUTOMATIC or MANUAL control of gas
flow to be selected. This is provided for use with an automatic gas flow controller
accessory (AutoGFS). It may be used to vary the flow of refrigerant in the same way that
the heater controls are used to vary the heating power. If an AutoGFS accessory is fitted,
the GAS lamp will flash for a time after switch-on, whilst the controller establishes a
reference position for the needle valve. During this time the Gas Flow Button will be
disabled.
An alternative use of the GAS FLOW control is in conjunction with a cryocooler. Here the
GAS FLOW control is automatically used to vary the speed of the cold head motor, to
provide sufficient cooling for the desired temperature, whilst maximising the life of the
cold head. In this application if GAS FLOW is set to MANUAL, at a setting of zero, the
cryocooler compressor is automatically shut down.
SWEEP
The ITC503 incorporates a programmable sweep facility. This is controlled by a single
RUN/PROGRAM button with three lamps. It is described in detail in section 6.
DISPLAY
The main display normally indicates the measured temperature. Two different display
formats are in use for cryogenic and non-cryogenic applications.
For cryogenic ranges the temperature is displayed in Kelvin as a number in the range 0 to
1677.7K (The full working range of the instrument). No + or - sign is displayed and where
an appropriate sensor is in use, the display auto-ranges as the temperature falls to give an
ultimate resolution of 0.001K at temperatures below 20K. With certain sensor types, the
measurement stability may be insufficient to allow resolution to 0.001K and auto-ranging
will either not be available at all or will be limited to 0.01K resolution.
For non-cryogenic ranges, temperature is displayed in Celsius as a signed number in the
range -273.1 to +1404.6C with either a + or a - sign displayed. Resolution is always to 0.1C
and no auto-ranging occurs.
Where more than one input channel is fitted, the SENSOR button may be used to switch
between input sensors. This affects only the displayed temperature, and so remains
operational even in REMOTE control. Whilst the button is pressed, the display indicates
the range code for the sensor being selected. This serves as a reminder of which sensor has
been associated with which channel.
Pressing the SET button switches the display to indicate the set temperature. Provided the
controller is in LOCAL, the RAISE and LOWER buttons may be used to adjust the set point.
Similarly, pressing the PROP, INT and DERIV buttons allows the value of the corresponding
control terms to be displayed and modified.
The display block includes two additional buttons LIMIT and CAL. These are rarely used
controls and are recessed behind the front panel to prevent inadvertent operation. They
may be operated using a pointed object, such as the point of a pencil. Their operation is
described in sections 5 and 7 respectively.

19
4.2
First Time Operation
Switch on the instrument by means of the POWER switch. Check that the green POWER
lamp lights.
After about one second the display will show "G" followed by a number, which indicates
the instrument's GPIB address (see below). Alternatively if the GPIB interface has been
disabled (by setting the GPIB address to 0), the display will show "S" followed by a
number, indicating the instrument's ISOBUS address. In either case, this will be followed by
the word "PASS". This indicates that the ITC503 has completed its self test and
initialisation.
After a further pause the internal SAFETY RELAY will close. This links the heater to the
controller output. At the same time, the display will show the measured temperature for
Channel 1.
If an AutoGFS accessory is fitted, the GAS FLOW lamp may continue to flash for several
minutes whilst the needle valve is reset. During this period, Gas Flow control is disabled,
but all other functions operate normally.
The ITC502 will now be under LOCAL control from the front panel, with the HEATER and
GAS FLOW in MANUAL and the heater voltage at zero.
4.3
Sensor Selection
Pressing the DISPLAY SENSOR button will cycle the display round the three possible input
sensors. (If only one channel is fitted the display will still switch between channels but will
not give a meaningful reading for sensors 2 and 3). Similarly the HEATER SENSOR button
may be used to select which of the three sensors is to be used for automatic control. This
button is disabled unless ITC503 is in LOCAL and the heater is set to MANUAL. When
changing control sensors ITC503 will automatically reset the SET temperature as described
in section 4.1 under HEATER. If a Heater Select relay accessory is fitted, the appropriate
heater will be selected as the control sensor is changed
4.4
Setting a Desired Temperature
Press the SET button to display the desired temperature. Whilst holding SET pressed, RAISE
and LOWER may be used to change the set point.
When in REMOTE control, provided LOCK is not lit, the SET button may still be used to
display the set point, but this cannot be adjusted by means of RAISE and LOWER.
4.5
Manual Heater Control
Press the Heater MAN button to select manual heater control. Whilst the button is pressed
the display will indicate the approximate output voltage. (Note that this is an uncalibrated
parameter and will vary to some extent with the heater loading).
Whilst MAN is pressed, the output voltage may be varied by means of RAISE and LOWER.

20
If the controller is in REMOTE it will not be possible to switch from AUTO to MANUAL
from the front panel. However if the controller is already in MANUAL and is not in LOCK,
pressing MAN will allow the output voltage to be displayed, though RAISE and LOWER
will have no effect.
ITC503 incorporates "bumpless" AUTO to MANUAL and MANUAL to AUTO transitions.
This means that if the controller is operating in AUTO and is switched to MANUAL the
heater voltage is held constant at its existing value. Similarly if the controller is operating
in MANUAL with the measured temperature equal to the set point and is switched to
AUTO, the heater voltage will remain unchanged. (If the measured temperature is not at
the set point, the heater voltage will of course change when switched to AUTO as the
controller attempts to bring the temperature to the set point).
4.6
Automatic Heater Control
Press the Heater AUTO button to select automatic heater control. As for manual control,
whilst the button is pressed the display will indicate the approximate output voltage. The
heater output will be varied by the controller such that the measured temperature is
brought towards the set point.
When in REMOTE, switching from MANUAL to AUTO is prevented, but pressing AUTO
whilst the controller is in AUTO will allow the output voltage to be displayed, provided
LOCK is not lit.
4.7
Manual Setting of P, I and D Control Terms
The PROPORTIONAL, INTEGRAL and DERIVATIVE control terms may be displayed and set
by means of the PROP, INT and DERIV buttons. (Refer to section 14 for a definition of the
three control terms).
PROP indicates the PROPORTIONAL BAND in Kelvin to a resolution of 0.001K (Note this
marks a change from ITC4 and ITC502 where the proportional band is expressed as a
percentage of the control sensor range in use. The extended precision of ITC503 arithmetic
allows the proportional band to be expressed directly in temperature units avoiding any
possibility of discontinuities when switching from one control sensor to another).
INT indicates the INTEGRAL ACTION TIME in minutes, covering a range of 0 to 140 minutes
in steps of 0.1 minute.
DERIV indicates the DERIVATIVE ACTION TIME in minutes, covering a range of 0 to 273
minutes (Though values beyond 70 minutes are unlikely to be required in practice.).
RAISE and LOWER may be used to vary the control terms whilst in LOCAL control. Once a
set of values has been chosen, they may be retained in the ITC503's non-volatile memory
and will not need resetting at switch on, provided a STORE operation is performed
(section 5.6).
The P, I and D terms cover a large range of values to cover systems ranging from a small
laboratory cryostat to a large furnace. For most laboratory applications a PROPORTIONAL
BAND of 5 to 50K will be appropriate, with an INTEGRAL TIME of 1 to 10 minutes.

21
The main purpose of DERIVATIVE action is to reduce overshoot, when approaching a new
set temperature. For many small systems derivative action will not be required and may be
left at zero. (Hold LOWER pressed for a second after 000.0 is displayed to ensure that
there is not a small residual setting of less than 0.05 mins which will show as zero).
The PROP and INT controls should not normally be set to zero, since this would correspond
to ON/OFF control (See section 14).
Section 14 covers the theory behind P,I,D control. However the following procedure gives
a good rule-of-thumb for setting the controls to a value that is close to optimum.
a) Set INT for a time much longer than the expected response time of the system.
b) Set DERIV to zero.
c) Select AUTO and reduce PROP until the temperature starts to oscillate above and
below some mean value (not necessarily the set point).
d) Time the period of oscillation (in minutes). This is a measure of the response time of
the system.
e) Set INT to a value approximately equal to the response time. Then increase the PROP
setting to a point where oscillation just ceases. Note the value of PROP at this point,
then set it to approximately double this value. This gives a good starting point for THE
PROP and INT control terms.
f) Test how the system responds to step changes in the SET point and modify the PROP
and INT settings for a reasonably fast response without excessive overshoot.
g) If overshoot remains a problem following a large step change in SET, try the effect of
adding some DERIVATIVE action. A good initial setting is half to one third of the
system response time measured above. This will probably require PROP to be re-
optimised for best results.
h) When optimising P, I and D the aim should be to achieve the lowest values of all three
terms, consistent with no oscillation and an acceptably small amount of overshoot. This
will give the fastest response for the system.
When adjusting the control terms remember that reducing the PROPORTIONAL BAND
increases the controller gain. This can cause some confusion when the concept of PID
control is first encountered.
Unlike the ITC502 there is no facility for associating PID values with each step. On the
ITC503 this is acheived more simply by use of the Auto PID feature, as decribed in the
following section.

22
4.8
Automatic Setting of P, I & D Control Terms
At cryogenic temperatures, the thermal behaviour of systems can vary widely as the
temperature is varied, due to changes in specific heats and gas viscosity and density. It is
therefore not surprising that changes in the values of P, I and D will be required for
control at different temperatures. ITC503 allows these values to be selected automatically
for different SET temperatures. The required values are held in an AUTO-PID look-up table
within the instrument. This table can hold up to 32 sets of PID values. Selecting the PID
AUTO function allows the values from this table to be used.
The values held in the table will be a function of the specific cryogenic system in use.
ITC503 allows these values to be determined automatically by use of the AUTO TUNE
algorithm, which forms part of the Object Bench software supplied with the instrument.
Alternatively values in the AUTO-PID table may be entered or modified from the front
panel by means of test mode 5 (See section 7.4).
4.9
Gas Flow Control
ITC503 is able to control a motorised needle valve, regulating the flow of cryogen used to
cool a sample. The needle valve may either be fitted to the main cryostat, controlling the
flow between the cryogen reservoir and a Variable Temperature insert, or it may be
incorporated in an automated Gas Flow Syphon, linking the cryostat with a separate
cryogen storage vessel. The flow dynamics of the two systems are rather different. The
former will be referred to here as an Automatic Needle Valve (AutoNV) and the latter as
an Automatic Gas Flow Syphon (AutoGFS).
In either case, with a motorised valve connected, the GAS FLOW lamp will flash following
switch-on and the controller will drive the valve towards its closed position for a distance
equal to the full travel of the valve. This ensures that the valve is fully closed (A slipping
clutch operates when the closed position is reached.) During this period the HEATER
controls may be operated normally, but GAS FLOW control will be inhibited.
Once the closed position has been established, GAS FLOW control may be used to control
the valve. Pressing Gas Flow AUTO will toggle between automatic control of the valve
(GAS AUTO lamp lit) and manual control of the valve (GAS AUTO lamp unlit). Whilst the
Gas Flow AUTO button is pressed, the display will show the current position of the valve,
as a percentage of fully open. If RAISE or LOWER is pressed at the same time, manual gas
flow control will automatically be selected (the AUTO lamp will go out if it was previously
lit) and any required valve position may be set. Note that since the new value can be set
faster than the valve can follow, the valve will continue to drive after the Gas Flow button
is released, until the selected position is achieved. If the button is pressed again during this
process, the display will show the position the valve has currently reached. If further
manual movement is required, RAISE or LOWER should again be used to specify a new
target setting.
Automatic Gas flow may be used either on its own at a fixed heater setting, or more
usually in conjunction with automatic heater control. (Since the control response to the
gas flow regulator is much slower than that to the heater, it is normally possible to
achieve a more stable control with the heater and gas flow both under automatic control).

23
The values of the PROP, INT and DERIV settings required for best control will not
necessarily be the same for automatic gas control as for automatic heater control. Having
decided upon the control mode required, the PID values should be optimised as described
above. Although not normally necessary, it is possible to separately tune the gas flow
control. This is described below in section 7.3.
When automatic gas control is used on its own, ITC503 attempts to control at the desired
set temperature in the usual way. When automatic gas flow is used in conjunction with
automatic heater control, the latter takes over responsibility of achieving the desired
temperature, whilst the gas flow control attempts to maintain a specific target heater
power. This target heater power is determined by the set temperature, and has been
chosen to give the best balance between control stability and cryogen usage. The
relationship between target heater voltage and set point temperature is determined by a
Target Table
and a
Gas Flow Scaling
parameter. When ITC503 is initially set up, a Gas
Flow Configuration Parameter must be set to specify a particular Target Table and certain
other parameters for Gas Flow Control. This is described in section 7.3.
4.10 Cryocooler Control
An alternative use of the Gas Flow controller is in conjunction with a Closed Cycle
Cryocooler. Operation is as described above for use with an AutoGFS. Where a needle
valve setting is varied for the AutoGFS, the speed of the Cold Head motor is varied on a
Cryocooler. Alternatively the Cryocooler may be shut down completely by setting a value
of Zero, using LOWER whilst holding the Gas Flow button pressed. This automatically turns
off the Cryocooler Compressor Motor. In Cryocooler mode, there is no flashing lamp at
power up, since there is no need to initialise a gas valve position.
Selecting between Cryocooler and AutoGFS modes is by means of the
Gas Flow
Configuration Parameter
, described in section 7.3.
4.11 Use with OP3KW MkII
Where ITC503 is being used with a furnace for high temperature work, output powers
greater than 80W may be required. The OP3KW MkII is an accessory which allows powers
up to 3KW on 230V mains, or 1.5KW on 115V mains. It provides a directly switched mains
output rated at 15 amps. The output is cycled on and off with a varying duty cycle, by
means of a solid state switch. The switch only operates at the zero crossing points of the
mains waveform, to minimise transisents and will have a minimum on or off period of 1
second. It is connected to the ITC503 via the Auxilary port. It cannot be used in
conjunction with either a Cryocooler or an AutoGFS.
Selecting OP3KW mode is by means of the
Gas Flow Configuration Parameter
,
described in section 7.3.
4.12 Test Mode
The operations described so far are all part of the ITC503 normal
operating mode
. An
additional
test mode
is available. This provides facilities to assist in testing the ITC503 and
to configure it for use with specific sensors, to configure it for Gas Flow or Cryocooler
operation and to set the GPIB address for use with the GPIB interface.

24
Test mode is entered from the front panel by holding the two red buttons RAISE and
LOWER pressed, whilst pressing and releasing the LOC/REM button. ITC503 will display the
message:
tESt
to indicate that it is entering test mode. After a second this will change to;
t 00
indicating that Test 0 may now be performed. (Test 0 in fact provides the exit from test
mode and restarts ITC502 for normal operation). RAISE and LOWER may be used at this
point to step through the 8 possible test functions, Test 0 to Test 7. When the chosen "t"
number is displayed, LOC/REM may be pressed to access the function. The following table
lists the available functions.
Test 0 Restart Normal Operation
Test 1 Test Front Panel Display and Lamps
Test 2 Test Front Panel Buttons
Test 3 Set GPIB Address
Test 4 Set Front Panel Display Variable
Test 5 Display / Adjust Auto-PID Table
Test 6 Configure Gas Flow / Cryocooler
Test 7 Configure Sensor Range
Tests 1, 2 and 4 are intended to assist in fault finding and are described in detail in
section4.12. Test 3 allows the GPIB address to be set and is described in section 7.5. Test 5
allows the Auto-PID table to be edited and is described in section 7.4. Test 6 is concerned
with Gas Flow Configuration and is described in section 7.3. Test 7 allows sensor
configuration to be selected and is described in section 11.5.

25
5 Limits
Limits may be placed on a number of the controller parameters, either as a means of
improving control performance, or to ensure the safety of the system being controlled.
5.1
Limiting Maximum Heater Output
The normal full output of the controller is 40V which is capable of delivering up to 80W
into a 20 ohm load. When controlling, it is generally desirable to achieve an approximate
balance between heating and cooling such that the rate at which the temperature rises
with the heater full-on is approximately the same as the rate at which it falls with the
heater off. At low temperatures this can be achieved by means of a limit on the heater
voltage. Once set, the limit cannot be exceeded in either AUTO or MAN.
To set a heater power limit, first ensure that the controller is in LOCAL and is switched to
MAN, preferably with the heater volts set to zero. Press the recessed LIMIT button and
hold it pressed. Now press the heater MAN button and release it. The display will switch to
show the heater limit in volts (approximate value). RAISE and LOWER may then be used to
adjust this, whilst LIMIT remains pressed.
5.2
Limiting Sensor Temperatures
A limiting value may be placed on the measured temperature. Where more than one
sensor is in use, separate limits may be placed on each. All the sensors will be continuously
checked against their respective limits, irrespective of which sensor is used for display or
control.
The limits are set in the same way as that for output power described above. First use the
DISPLAY SENSOR button to select the sensor whose limit is to be set. Press LIMIT and hold
it pressed, then briefly press and release the DISPLAY SENSOR button, to indicate that a
display sensor is to be adjusted. The current limiting value will be displayed and RAISE and
LOWER may be used as usual to modify it. The same sequence may be repeated for each
of the other sensors.
The limits should normally be set a little above the maximum operating temperature for
the system.
If a limit is set to 1677.7K, it will be disabled, since it is impossible to get a measured
temperature greater than this.
Warning: An ITC503 which has not been supplied as part of a complete system, will
normally be shipped with the limits disabled in this way. If your cryostat can be
damaged by over-temperature, you should set appropriate limits before
operating the system.
If any limit is exceeded the ITC503 will immediately display one of the messages:
Hot 1, Hot 2, Hot 3

26
indicating which sensor has detected the over-temperature. At the same time the heater
output voltage will be set to zero. If this causes the temperature to fall below the limit,
the message will clear and normal operation will resume. If the heater is in AUTO, heater
voltage will be reapplied as necessary to achieve the SET temperature. (In MAN, the heater
voltage will remain at zero until a new value is selected).
If after 10 seconds the temperature is still above the limit, ITC503 will assume that a fault
may have occurred in the heater circuit. It will therefore open its output safety relay,
completely isolating the heater from the controller output. If this occurs the display will
remain latched in the "Hot n" state, even after the system has cooled. To restore normal
operation, it will be necessary to switch ITC503 off and on again.
By setting a wrong limit, it is possible to end up in a situation where the "Hot n" message
is displayed from switch-on. If this occurs, refer to section 16.
5.3
Limiting Set Temperature
The Set Temperature is automatically limited to the Sensor Limit described above, for the
control sensor in use. It is possible to place an additional limit (below the sensor limit) on
the set temperature.
To set this limit, the SET button is pressed briefly, whilst holding LIMIT. Then RAISE and
LOWER are used as above.
5.4
System Over-Temperature
Shutdown An external over-temperature limit may be connected to the AUXILIARY socket,
as described in section . If this device detects an over-temperature the message:
Hot 0
will be displayed. The same protocol applies. If the condition disappears within 10
seconds, normal operation will resume. If it does not, the safety relay will open and the
instrument will remain latched in the "Hot 0" state.3.4.
5.5
Limiting Display Resolution
As the temperature falls the display resolution normally increases automatically (for Kelvin
ranges only). The ultimate display resolution is determined by the sensor type in use. For
most ranges this will be 0.001K. For some (for example thermocouples) only 0.01K is
available. In many systems the full resolution will not be necessary and it may be less
distracting to limit the display resolution to less than the ultimate available for the sensor.
This may be achieved using the LIMIT button as follows.
Press and
hold
the DISPLAY SENSOR button, such that the required SENSOR lamp is lit.
Now press and release, the LIMIT button. The display will show:-
o.ooo

27
or something similar. RAISE and LOWER may be used to move the position of the decimal
point within this display, which indicates how many decimal places will be be displayed at
the lowest temperature. In the example shown the display will give 3 decimal places, and
hence 0.001K resolution. This may be reduced to 2, 1 or even 0 decimal places if required.
Where a sensor is only able to provide 2 decimal places, it will not be possible to position
the decimal point to show a third place.
5.6
Storing Limits and other Power-Up Defaults
Whenever any data has been changed, which is intended to be retained after power
down, this must be deliberately STORED. This write operation is achieved by holding LIMIT
pressed in, whilst pressing and releasing LOC/REM. The display will briefly show "Stor"
indicating that the data has been correctly stored. (It is not necessary to hold LOC/REM
pressed, the complete RAM contents will always be written to the EEPROM).
If instead of showing "Stor", the display shows "Prot", this indicates that the memory is
protected by the hardware WRITE-ENABLE switch being in the OFF position. This is a small
2 way Dual-in-Line switch SW2 on the motherboard. Set it to the "ON" position and try
again. Only Switch No.1 of this switch has any effect but it will generally be easiest to
move both parts of the switch together.
The switch need only be returned to the OFF position if it is desired to prevent any
possibility of the data being changed by someone tampering with the front panel.
Any changes that are to be retained after power down must be stored in this way. This
includes changes to range data, span and zero calibration, sweep values, hot limits and so
on.
5.7
Temporarily Disabling Sensor Temperature
Limits
(Only applies to firmware version 1.07 and later.)
There may be occasions when you wish to temporarily disable one or more of the
temperature limit on one or more sensors. For example the sensor for that channel may
have been disconnected or the limit may have been set to too low a value. This can be
done by pressing the HEATER SENSOR SELECT button until the sensor lamp is lit for the
channel you wish to disable. Whilst holding this button pressed, if you simultaneously
press and release the RAISE and LOWER buttons, the limit will be disabled. If the channel
was already displaying its
hot
message, this will be cleared. Note that if the output safety
relay has already opened, cancelling the limit will not close the relay. If you really wish to
close the relay after disabling one or more hot limits, enter the test mode by pressing
RAISE, LOWER and LOC/REM, then exit again through t=0. This will restart the controller
and close the relay, leaving the limits disabled.
Disabling the limits in this way will not be preserved after power off, even if you have
performed a STORE operation. This is done deliberately to prevent limits being disabled
permenantly by mistake.

28
6 Sweep
6.1
Purpose of Sweep
The sweep facility allows the set point to be programmed to follow a fixed
temperature/time profile. The profile consists of a series of constant temperature steps
joined by linear ramps.
A program may consist of up to 16 ramps and 16 steps. Each ramp and step may last for a
period programmable from 0.1 minute to 24 hours. Once programmed, the same
sequence may be repeated as often as required and if desired, may be retained in non-
volatile memory when ITC503 is switched off.
The Auto-PID facility may be used in conjunction with the sweep facility to provide
optimum control over a wide temperature range. (To avoid the risk of discontinuities
during a sweep, it may be helpful to ensure that the start and end temperatures for the
sweep ramps coincide with the Auto-PID segments).
The sweep is controlled from the front panel by a single RUN/PROGRAM button, operable
only in LOCAL control.
6.2
Starting a Sweep
Press the RUN/PROGRAM button and release. The display will show
run
whilst the button is pressed and providing a program is present, the SWEEP lamp will light
when the button is released. The set point will start to ramp towards the value selected
for the first program step. When the first sweep time is complete, the temperature will
have reached its programmed set point. The SWEEP lamp will go out and the HOLD lamp
will light. This sequence will be repeated for each of the programmed steps. After the
16th step has been completed, both lights will go out and the controller will be left with
the set point equal to that of the 16th step. Any steps with sweep and hold times set to
zero will be bypassed. (If neither SWEEP nor HOLD lamp lights when RUN/PROGRAM is
released, it means that all 16 steps have zero for both sweep time and hold time.)
Remember that the sweep facility programs the ITC503 set point. The measured
temperature will tend to lag behind the set point by an amount dependant upon the
response time of the system. Remember also that ITC503 must be set to AUTO if the actual
temperature is to be varied!
6.3
Monitoring the Progress of a Sweep
At any time during a sweep, the HOLD and SWEEP lamps will indicate whether the set
point is being ramped or held.
The SET button may be pressed at any time to indicate the current value of the set point.

29
If RUN/PROGRAM is pressed briefly, whilst the sweep is running, the display will indicate:
P nn
where nn is the current program step number in the range 1 to 16.
* WARNING *
Do not hold RUN/PROGRAM too long, or the sweep will be terminated, see below.
6.4
Stopping a Sweep
If left uninterrupted, a sweep program will continue till all steps have been completed. If
required it can be terminated before it is complete by pressing RUN/PROGRAM, and
holding it until the display changes to:
End
The sweep program will be aborted and the set point will be left at the value it had
reached when the sweep was terminated.
6.5
Programming the Sweep
A Sweep Program may be entered from the front panel, starting with the controller in
LOCAL. The method is as follows:
Press RUN/PROGRAM and hold it in.
Wait till the display changes from "run" to "Pro", then release the button. ITC503 is now
in the program mode and the display will indicate
P 01
showing that the first program step is to be examined. (If you wait too long with the "P
01" display, ITC503 will automatically leave the program mode and resume normal
operation.)
Press and hold RUN/PROGRAM and the PROGRAM lamp will light and the programmed set
point for the first step will be displayed. It may be adjusted if required, in the usual way,
by means of RAISE and LOWER.
Release RUN/PROGRAM and press it again. SWEEP will now light, and the sweep time
taken by the controller to reach this programmed set point, will be displayed. The time is
displayed in minutes with a resolution of 0.1 minute (6 seconds). RAISE and LOWER allow
this to be adjusted between zero and 1339.9 minutes (24 hours).
Note that for the first step, this will be the time taken to sweep to the first set point from
the set temperature when the program run commences. Thus the actual sweep rate will be
recomputed for each run.
 Loading...
Loading...