


ekor.rps
Multifunctional protection unit
Volume 1 of 3
General instructions
IG-150-EN, version 04, 03/10/16
LIB

CAUTION!
When medium-voltage equipment is operating, certain components are live, other parts may be in movement and some may
reach high temperatures. Therefore, the use of this equipment poses electrical, mechanical and thermal risks.
In order to ensure an acceptable level of protection for people and property, and in compliance with applicable environmental
recommendations, Ormazabal designs and manufactures its products according to the principle of integrated safety, based on
the following criteria:
• Elimination of hazards wherever possible.
• Where elimination of hazards is neither technically nor economically feasible, appropriate protection functions are
incorporated in the equipment.
• Communication about remaining risks to facilitate the design of operating procedures which prevent such risks,
training for the personnel in charge of the equipment, and the use of suitable personal protective equipment.
• Use of recyclable materials and establishment of procedures for the disposal of equipment and components so
that once the end of their service lives is reached, they are duly processed in accordance, as far as possible, with the
environmental restrictions established by the competent authorities
Consequently, the equipment to which the present manual refers complies with the requirements of section 11.2 of Standard
IEC 62271-1. It must therefore only be operated by appropriately qualified and supervised personnel, in accordance with the
requirements of standard EN50110-1 on the safety of electrical installations and standard EN50110-2 on activities in or near
electrical installations. Personnel must be fully familiar with the instructions and warnings contained in this manual and in other
recommendations of a more general nature which are applicable to the situation according to current legislation
The above must be carefully observed, as the correct and safe operation of this equipment depends not only on its design but also
on general circumstances which are in general beyond the control and responsibility of the manufacturer. More specifically:
• The equipment must be handled and transported appropriately from the factory to the place of installation.
• All intermediate storage should occur in conditions which do not alter or damage the characteristics of the equipment
or its essential components.
• Service conditions must be compatible with the equipment rating.
• The equipment must be operated strictly in accordance with the instructions given in the manual, and the applicable
operating and safety principles must be clearly understood.
• Maintenance should be performed properly, taking into account the actual service and environmental conditions in
the place of installation.
The manufacturer declines all liability for any significant indirect damages resulting from violation of the guarantee, under any
jurisdiction, including loss of income, stoppages and costs resulting from repair or replacement of parts.
[1]
.
Warranty
The manufacturer guarantees this product against any defect in materials and operation during the contractual period. In the
event that defects are detected, the manufacturer may opt either to repair or replace the equipment. Improper handling of this
equipment and its repair by the user shall constitute a violation of the guarantee.
Registered Trademarks and Copyrights
All registered trademarks cited in this document are the property of their respective owners. The intellectual property of this manual
belongs to Ormazabal.
[1]
For example, in Spain the “Regulation on technical conditions and guarantees for safety in high-voltage electrical installations” – Royal Decree
337/2014 is obligatory.
In view of the constant evolution in standards and design, the characteristics of the elements contained in this manual are subject
to change without prior notice. These characteristics, as well as the availability of components, are subject to confirmation
byOrmazabal.

General instructions
ekor.rps
Contents
Contents
1. General description ...................................................6
1.1. Scope of the manual .........................6
1.2. Functions....................................6
1.3. Model coding................................7
1.4. User interface...............................10
1.4.1. Local .......................................10
1.4.2. Remote.....................................10
1.5. Hardware configurations....................11
1.6. Environmental conditions ...................12
1.7. Tests........................................12
1.7.1. Electrical tests ..............................12
1.7.2. Environmental tests .........................12
1.7.3. Mechanical tests ............................12
1.8. CE Conformity ..............................12
1.9. Wiring diagrams ............................13
2. Hardware ..................................................................33
2.1. Constructive characteristics. Horizontal box
(ekor.rps-h).................................33
2.2. Constructive characteristics (ekor.rps-tcp) ...34
2.3. Rear terminals ..............................35
2.4. Options for rear communications ports . . . . . .36
2.5. RS485 connection detail between
some units..................................38
2.6. Connection between fiber optic and
a radio modem .............................39
2.7. Ethernet communication....................40
2.7.1. Ethernet via GOF ............................40
2.7.2. Ethernet via RJ45 cable......................40
2.8. Technical characteristics.....................41
2.8.1. Power Supply ...............................41
2.8.2. Output Contacts ............................41
2.8.3. Digital inputs (optoisolated).................41
2.8.4. IRIG-B input.................................42
2.8.5. Analog outputs .............................43
2.8.6. Phase and neutral current circuits
(standard rating 1 A) ........................43
2.8.7. Sensitive neutral or isolated neutral
current circuits (standard rating 0.025 A).....43
2.8.8. Phase and neutral current circuits
(specified rating 1/5 A) ......................43
2.8.9. Sensitive neutral or isolated neutral current
circuits (specified rating 0.25/0.025 A) .......43
2.8.10. Voltage circuits .............................43
2.8.11. Measurements accuracy.....................44
2.9. Operating frequency........................44
2.10. Phase order.................................44
3. Unit configuration ...................................................45
3.1. Programming of digital inputs and
logic inputs .................................45
3.2. Programming of digital outputs .............46
3.3. Programming of LEDs .......................47
3.4. Programming of general settings............47
3.4.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .47
3.4.2. Setting ranges (table 0, single)...............48
3.5. Communication configuration ..............49
3.5.1. Communication via front door (Port 1_1)
and rear port Nr. 2 (Port 1_2) (COM 1)........49
3.5.2. Communication via rear port Nr. 1
(Port 2) (COM 2).............................49
3.5.3. Ethernet communication....................51
3.6. Other configuration settings ................52
3.6.1. Frequency ..................................52
3.6.2. Language...................................52
3.6.3. Phase order .................................52
3.6.4. Neutral Parameter ..........................52
3.6.5. Calibration..................................52
3.6.6. Test mode ..................................52
3.6.7. Push-buttons/LEDs enabling and locking
by command ...............................53
3.6.8. Power supply supervision enabling ..........53
3.6.9. Power supply enabling ......................53
3.6.10. Display contrast setting .....................53
4. Protection functions. Description and settings.....54
4.1. Phase overcurrent protection................54
4.1.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .54
4.1.2. Settings ranges of the timed characteristic
(6 tables) (normal and HIGH2) ...............54
4.1.3. Timing cancellation .........................55
4.1.4. Settings ranges of the instantaneous
characteristic (low level) (6 tables)
(normal and HIGH2).........................55
4.1.5. Settings ranges of the instantaneous
characteristic (high level) (6 tables) ..........56
4.2. Neutral overcurrent protection ..............56
4.2.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .56
4.2.2. Setting ranges of the timed characteristic
(6 tables) (normal and HIGH2) ...............56
4.2.3. Setting range of neutral time inhibition
(6 tables) ...................................57
4.2.4. Settings ranges of the instantaneous
characteristic (low level) (6 tables)
(normal and HIGH2).........................57
4.2.5. Settings ranges of the instantaneous
characteristic (high level) (6 tables)
(normal and HIGH2).........................57
4.3. Instantaneous special operation.............58
4.4. 2
4.5. Protection functions blocking with
4.6. Directionality of the phase and
4.6.1. Phase directional in quadrature (67) .........62
nd
harmonic restraint .......................60
manual closing .............................60
neutral overcurrent protections .............61
IG-150-EN version 04; 03/10/16
3

Contents General instructions
ekor.rps
4.6.2. Phase directional by sequences (67) .........63
4.6.3. Neutral directional (67N); polarization
by S0(V0)....................................64
4.6.4. Neutral directional (67N); polarization
by S-(V2) ...................................65
4.6.5. Neutral directional (67N); polarization
by S0+S-(V0+V2) ..........................66
4.6.6. Neutral directional (67N); polarization
by I .........................................66
4.6.7. Neutral directional (67N); polarization
by S0+I(V0+I
) ...........................67
pol
4.6.8. Neutral directional (67N); polarization
by S– + I(V2+I
)...........................67
pol
4.6.9. Neutral directional (67N); polarization
by S0 + S- + I (V0 + V2 + I
) ..................68
pol
4.6.10. Neutral directional (67N); watimetric
directional ..................................69
4.6.11. Neutral directional (67N);
I*cos (φ)/I*sen (φ) directional ................70
4.7. Sensitive neutral overcurrent protection.....72
4.7.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .72
4.7.2. Setting ranges of the timed characteristic
(6 tables) (normal and HIGH2) ...............72
4.7.3. Setting ranges of the instantaneous
characteristic (single level) (6 tables)
(normal and HIGH2).........................72
4.7.4. Directionality ...............................73
4.8. Current unbalance protection ...............77
4.8.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .77
4.8.2. Setting ranges of the timed characteristic
(6 tables) ...................................77
4.8.3. Setting ranges of the instantaneous
characteristic (6 tables)......................77
4.9. Broken conductor protection................78
4.9.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .78
4.9.2. Setting ranges (6 tables).....................78
4.10. Phase characteristic voltage control
(function 51 V/50 V) .........................78
4.10.1. Mode 1 (51V) ...............................78
4.10.2. Mode 2 (51V) ...............................79
4.10.3. Mode 2 (50 V) ...............................79
4.10.4. Summary ...................................79
4.11. High current lockout . . . . . . . . . . . . . . . . . . . . . . . .80
4.11.1. Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
4.11.2. Setting (table 0, single)......................80
4.12. Cold load pickup............................80
4.12.1. Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .80
4.12.2. Settings (table 0, single) .....................81
4.13. Isolated neutral protection ..................82
4.13.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .82
4.13.2. Setting ranges ..............................82
4.14. Overvoltage protection .....................83
4.14.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .83
4.14.2. Setting ranges of the timed characteristic
(6 tables) ...................................83
4.14.3. Setting ranges of the Instantaneous
characteristic (6 tables)......................84
4.15. Undervoltage protection ....................84
4.15.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .84
4.15.2. Setting ranges of the timed characteristic
(6 Tables) ...................................84
4.15.3. Setting ranges of the instantaneous
characteristic (6 tables)......................85
4.16. Voltage unbalance protection ...............85
4.16.1. Timed characteristic.........................85
4.16.2. Instantaneous characteristic.................86
4.17. Zero sequence overvoltage protection ......86
4.17.1. Setting range (6 tables) .....................87
4.18. Frequency protection .......................87
4.18.1. Minimum frequency ........................88
4.18.2. Maximum frequency ........................88
4.18.3. Frequency gradient .........................88
4.19. Fuse failure .................................90
4.20. Teleprotection ..............................91
4.20.1. Operation ..................................91
4.20.2. Setting range (6 tables) .....................91
4.20.3. Protection trip mask (6 tables) ...............92
4.20.4. Used signals ................................92
4.21. Thermal image..............................96
4.21.1. General description . . . . . . . . . . . . . . . . . . . . . . . . .96
4.21.2. Settings ....................................97
4.21.3. Trip times...................................97
4.21.4. Heating curves .............................98
4.21.5. Cooling curves..............................98
4.22. Field loss protection.........................99
4.22.1. Overview ...................................99
4.22.2. General settings range ......................99
4.22.3. MHO area settings range ..................100
4.23. Power protection .........................101
4.23.1. General................................... 101
4.23.2. Minimum power protection ...............101
4.23.3. Maximum power protection............... 102
4.23.4. Reverse power protection .................102
4.23.5. Reactive power reverse protection.........103
4.23.6. Minimum apparent power protection .....103
4.23.7. Maximum apparent power protection .....104
4.24. Breaker monitorin......................... 104
4.24.1. General description . . . . . . . . . . . . . . . . . . . . . . . 104
4.24.2. Setting range (6 tables) ................... 105
4.24.3. Coil monitoring example ..................105
4.25. Coil monitoring example ..................106
4.25.1. General description . . . . . . . . . . . . . . . . . . . . . . . 106
4.25.2. Setting range (6 tables) ................... 106
4.26. Breaker failure protection .................106
4.26.1. General description . . . . . . . . . . . . . . . . . . . . . . . 106
4.26.2. Setting range (6 tables) ................... 107
4.27. Tap changer locking (50TCL function)...... 107
4.28. Locking of the protection functions ....... 107
4.29. Fault locator ..............................107
4.29.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.29.2. Programming settings and
collecting results..........................108
4.29.3. Locator operation......................... 109
4
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Contents
5. Automation functions .......................................... 112
5.1. Recloser ..................................112
5.1.1. General description . . . . . . . . . . . . . . . . . . . . . . . 112
5.1.2. Operation ................................113
5.1.3. Setting range (6 tables) ...................115
5.1.4. Trips enabling (6 tables) ...................115
5.1.5. Enable of reclosings (6 tables) ............. 115
5.1.6. Other operation characteristics............ 116
5.2. Sequence coordination ...................116
5.3. Reclosing after tripping
by minimum frequency ...................117
5.3.1. General description . . . . . . . . . . . . . . . . . . . . . . . 117
5.3.2. Settings ..................................117
5.4. Special recloser to operate with
protections with single-pole trip........... 118
5.5. Syncrocheck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.5.1. General description . . . . . . . . . . . . . . . . . . . . . . . 118
5.5.2. Settings ..................................119
5.6. Close locking with presence or
absence of voltage........................ 119
5.7. Automation function for distribution
substations ...............................120
5.7.1. Unloaded springs automation functions ...120
5.7.2. Voltage presence ......................... 120
5.7.3. Lockings.................................. 120
6. Other settings........................................................ 121
6.1. Programming of logic outputs ............121
6.2. Selectivity logic functions ................. 122
6.3. Measurements chronological record....... 122
8. Other functions ..................................................... 129
8.1. Time setting and synchronization .........129
8.1.1. Time setting .............................. 129
8.1.2. Synchronization ..........................129
8.2. Control messages .........................129
8.3. Mando local/remoto ......................135
8.4. Commands by keyboard and
front push-buttons........................ 136
8.5. Power supply supervision .................136
8.6. External supply supervision ............... 136
8.7. Temperature supervision.................. 137
8.8. Test mode ................................137
9. Operation mode .................................................... 138
9.1. Through keyboard/display ................138
9.1.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
9.1.2. Elements of the keyboard/display unit .....138
9.1.3. Operating mode .......................... 139
9.2. Through the PC . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
10. Reception, storage, installation and tests .......... 141
10.1. Reception and storage ....................141
10.2. Connecting procedure ....................141
10.2.1. Power supply .............................141
10.2.2. Earth connection ......................... 141
10.2.3. RS232 cable connections to be used
between the PC and the ekor.rps unit ....141
10.3. Unit addressing ...........................142
10.4. Commissioning . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
7. data acquisition functions.................................... 123
7.1. Events reports ............................123
7.2. fault records ..............................124
7.3. Measurements............................ 125
7.3.1. Measurements at the secondary........... 125
7.3.2. Measurements at the primary .............126
7.4. Measurements historical report ...........127
7.4.1. General description . . . . . . . . . . . . . . . . . . . . . . . 127
7.4.2. Settings range (6 tables)...................127
7.5. Statistical data ............................127
7.6. Protection status..........................128
7.6.1. By keyboard/display ...................... 128
7.6.2. Through PC (protections console) ......... 128
7.7. Oscillograph data recorder ................128
IG-150-EN version 04; 03/10/16
5
General description General instructions
ekor.rps
1. General description
The ekor.rps units are multifunctional protection relays
of numerical technology, and they constitute the basic
element of protection, measurement and control for
cogeneration facilities or for HV/MV electrical bays. They
can be used as autonomous elements of protection, control
and measurement of an electric bay, or integrated within an
integrated protection and control system.
1.1. Scope of the manual
This manual does not t a certain ekor.rps model, it ts the
whole options (for FW version equal or newer than W). For
each specic model only the physical characteristics and
functions of the model are applied. The manual consists of
two volumes: The rst contains the information regarding
conguration, functions etc. and the second contains the
1.2. Functions
1. Protection
Standard functions
a. Three phase overcurrent protection (3 x 50/51, with two
instantaneous levels)
b. Neutral overcurrent protection (50N/51N, with two
instantaneous levels)
c. Phase current unbalance protection (46)
d. Broken conductor protection (46 BC)
e. Breaker monitoring
f. Close and trip circuit monitoring
g. Breaker failure
nd
harmonic restraint
h. 2
Functions depending on model
a. Sensitive neutral overcurrent (50NS/51NS)
b. Directionality for the phase overcurrent (3 x 67)
c. Directionality for the neutral overcurrent (67N)
d. Isolated neutral directional (67IN)
e. Second directional overcurrent unit (67, 67N), independent
of the first unit
f. Voltage controlled overcurrent (50/51 V), cold load
pickup, high current lockout
g. Special functions (zones, pilot protection, negative
sequence directional, etc.)
h. Phase voltage protection: Overvoltage (3 x 59), undervoltage
(3 x 27), unbalance (47)
i. Zero sequence overvoltage protection (59N, 64)
Inside the family dierent models exist that dier to each
other for some hardware aspect or for their functionality.
The Firmware is common for all the models; the available
functions for the user in each model are dened in a circuit
of programmable logic (PLD). The Firmware is chargeable in
the equipment through the serial port, what facilitates the
versions updating.
following appendixes: Curves for the operation of the timed
functions, communication protocols, keyboard/display menu
structure, etc.
Anyway, each unit is provided with a resumed “characteristics
sheet”, which describes the functions of the specic model
and its interconnections diagram.
j. Frequency protection: Maximum (81 M), minimum (81 m),
df/dt (81 R)
k. Power protection (32): Maximum, minimum, reverse
l. Fuse failure surveillance
m. Thermal image (49)
n. Fault locator
o. Field loss
2. Automatisms
Functions depending on model
a. Three-phase recloser (overcurrent trips)
b. Recloser for single-phase overcurrent trips
c. Recloser for restoration after frequency trips
d. Syncrocheck
e. Special automatisms for distribution substations (slack
springs, voltage presence)
3. Measurements
a. Phase and neutral current measurement (optional:
Sensitive neutral)
b. Simple and compound voltage measurement
c. Active, reactive and apparent power measurement
d. Active and reactive energy measurement
e. Power factor measurement
f. Current maximeter
g. Negative sequence measurement (I
2/I1
) in %
6
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
General description
4. Data acquisition
a. Events chronological reports
b. Fault chronological reports
c. Maximum and minimum measurement historical
d. Oscillograph data recorder
1.3. Model coding
The ekor.rps protection unit has the following models:
DC: 67+67N+46+46FA+50BF(trif)+74TC/CC+ 67NS+
67NA+49+51V+cold load pickup+50CSC+68FF
The following models are available as an option and
when conrmed by Ormazabal’s technical-commercial
department:
1. Non directional:
NB: 50/51 + 50/51N + 46 + 46BC + 50BF (three-phase) + 74TC/CC
NC: Model NB + 50/51NS + 49 + 51 V + cold load pickup +
50TCL + 68FF
ND: Model NC + 59 + 27 + 47 + 59N + 81 O/U + 81R + 25
NE: Model ND + FL
For all of them, the 79 function is optional.
2. Directional:
DB: 67 + 67N + 46 + 46BC + 50BF (three-phase) + 74TC/CC
DD: Model DC + 59 + 27 + 47 + 59N + 81 O/U + 81R + 25
nd
DE: Model DD + 2
DF: Model DE + FL
unit 67/67N + 50BF (single-phase)
5. Other characteristics
a. Settings tables. Except for the configuration settings,
which are single table settings, there are 6 tables for the
various setting groups. One of the 4 tables is the active
one in a certain moment. The active table selection
can be done through the keyboard/display (in “change
settings”), or by command through the message from the
protections console or by activation of a digital input.
3. Distributed generation interconnection:
IB: 50/51 + 67N + 46 + 46BC+ 50BF (three-phase) + 74TC/CC +
68FF + 59 + 27 + 47 + 59N + 81 O/o + 81R + 25 + 32 + 79 +
79 (81 m) + high current lockout.
nd
IC: Model IB + 49 + 51 V + cold load pickup + 50TCL + 2
67/67N + 40.
unit
4. For distribution substations:
CR: 50/51 + 50/51 N + 46 + 46 BC+ 50 BF (three-phase) +
74TC/CC + 49 + 79 + high current lockout + special automatisms.
5. Special models: They are those that, in their
functionality, do not exactly correspond to any of the
families described:
E1: 67 + 67N + 67NS + 46 + 46FA + 50BF (three-phase) +
74TC/CC + 51 V + 79 +High current Lockout + LF.
E2: 67 + 67N +67NS + 51 V + 27 + 59 +59N + FF + 81 + 32 + 49.
E3: 50/51 + 50/51N + 50/51NS + 67NA + 79.
E4: E1: 67 + 67N + 67NS + 46 + 46FA + 50BF (three-phase) +
74TC/CC + 51 V + 79 + high current lockout + cold load pickup +
50CSC + 59N + 25 + LF.
For all of them, the 79 function is optional.
IG-150-EN version 04; 03/10/16
7

General description General instructions
ekor.rps
Model coding:
ekor.rps
MODELO PL300
MODEL
no direccional
ekor.rps non directional
ekor.rps Directional
direccional
ekor.rps Interconnection
interconexión
Distribution center
ekor.rps
centros de reparto
BOX TYPE
Horizontal
TCP integrated Note 5
POWER SUPPLY
ANALOG INPUTS TERMINALS
Pin type Standard terminals
Closed terminals
EXTENSION MODULE
No module
9 Dls (6 indepen.) + 7 DOs (3 indepen.)
DIGITAL INPUTS VOLTAGE
Range: 18-160 Vdc
Range: 86-280 Vdc
REAR COMMUNICATION PORTS
PFO (COM-2) + PFO (COM-1)
RS232 (COM-2) + RS232 (COM-1)
RS485 (COM-2) + RS232 (COM-1)
SPECIAL FUNCTIONS AND AUTOMATISMS
Battery voltage measurement and optional operating temperature
Optional operating temperature
Battery voltage measurement and optional operating temp.
Current polarized 67N
No 0
Yes 1
V0 or IN calculation
None 0
0 calculated
V
N calculated
I
Both (only for models DD + current polarized 67N,
DE + current polarized 67N, DF + current polarized 67N)
NB
NC
ND
NE
DB
DC
DD
DE
DF
IB
IC
CR
H
T
YdcV 06-81
ZdcV 082-68
Programmable Protocol
Programmable Protocol
Programmable Protocol
Programmable Protocol
1
2
0
1
Y
Z
AGFO
BPFO
C RS232
DRS485
E GFO (COM-2) + GFO (COM-1)
Note 1
F
Note 1
G
Note 1
Note 1
H
Note 1
IGFO (COM-2) + RS232 (COM-1)
JEthernet RJ45 + GFO (COM-2)
Note 6
KEthernet GFO + GFO (COM-2)
Note 6
LEthernet RJ45 + RS232 (COM-2)
Note 6
MEthernet RJ45 + RS485 (COM-2)
Note 6
TInternal communication for TCP
Note 5
0 No Functions
Note 2
179 + 79 (81 m) (Included in models IB, IC y CR)
285 (Only for directional PL-300 models)
Note 2
379 + 79 (81 m) + 85 (Only for directional PL-300 models)
0None
1Battery voltage measurement
2
3
Note 4
Note 3
Note 3
For models with two communication ports,
COM 2 port protocol is programmable, and
COM 1 protocol is always PROCOME.
79 (81 m) (recloser by underfrequency) unit,
only exist for models with 81 U
For the models marked with an * in the
transformer arrangement table
Only for models with 67 N and T9 = Ip
(*olarization current)
With “T” type box, the communication must
be “T ”
In this case, the Ethernet port protocol is
encapsulated PROCOME
1
2
3
Figure 1.1. Model coding
8
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
Transformer arrangement:
T4 T5 T9
Model nb
Model nc
Model nd*
Model nd*
Model ne*
Model db
Model db + current polarized 67N
Model dc
Model dc + current polarized 67N*
Model dc + current polarized 67N*
Model dd*
Model dd*
Model dd + current polarized 67N
Model de*
Model de + current polarized 67N
Model df*
Model df + current polarized 67N
Model ib
Model ib + current polarized 67N*
Model ib + current polarized 67N*
Model ic
Model ic + current polarized 67N*
Model cr
See transformer arrangement examples in the wiring diagrams.
I
N
I
N
I
N
I
N
I
N
I
N
I
N
I
N
I
NS
I
N
I
NS
I
NS
I
N
I
N
V
0
I
N
General description
I
NS
I
NS
V
0
Same transformer arrangement as model nd
V
0
V
0
I
NS
I
NS
V
0
I
NS
V
0
I
0
Same transformer arrangement as model dd
Same transformer arrangement as model dd + current polarized 67N
Same transformer arrangement as model dd
Same transformer arrangement as model dd + current polarized 67N
V
0
I
0
I
0
Same transformer arrangement as model ib
Same transformer arrangement as model ib + current polarized 67N
V
SYNC
V
SYNC
I
0
V
0
I
0
I
0
V
SYNC
V
SYNC
V
SYNC
V
SYNC
V
SYNC
V
SYNC
V0 calculated
IN calculated
V0 calculated
IN calculated
V0 calculated
IN calculated
IN and V0 calculated
V0 calculated
IN calculated
Table 1.1. Transformer arrangement
IG-150-EN version 04; 03/10/16
9
General description General instructions
ekor.rps
1.4. User interface
1.4.1. Local
The front board has:
1. 16 key keyboard
2. 4 signaled push-buttons
a. : Breaker closure
b.
c.
d.
: Breaker opening
: Local/remote
:It validates the other three pushbuttons, to avoid
unwished maneuvers. It must be pushed at the same time
you push the other buttons for them to have effect
1.4.2. Remote
Depending on model the rear board has one or two ports
which can be glass ber optic (ST type connector), plastic
ber optic, RS232 or RS485 for connection to PC, modem or
substation control unit (in integrated systems). The protocol
can be PROCOME, DNP 3.0, MODBUS or IEC 870-5-101 or
IEC870-5-103.
These pushbuttons must be pushed at least for 0.5 s to be
considered active.
Moreover, the pushbuttons to be eective, “pushbutton enable” setting must be set as “YES” (see “other
conguration settings” chapter).
3. 2 line, 16 character LCD
4. 7 red LEDS and one green/red
5. RS232 connector for direct connection with a PC.
PROCOME protocol
There are also models with one Ethernet port (ber optic or
RJ45), with PROCOME TCP/IP protocol.
10
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
1.5. Hardware configurations
General description
Next are the Hardware possibilities that dene a specic
model:
1. Box type:
a. Horizontal
2. Terminal type:
a. For pin tipy terminals
b. For closed terminals
3. Power supply:
a. 125/220V
b. 24/48V
dc
dc
4. Digital inputs voltage range:
a. Extended (low): 18 up to 160 Vdc. They are single-
directional inputs (with polarity).
b. Extended (high): 86 up to 280 V
. They are single-
dc
directional inputs (with polarity).
c. Restricted 24 V
: 18 up to 34 Vdc. They are single-
dc
directional inputs (with polarity).
d. Restricted 48 V
: 36 up to 60 Vdc. They are single-
dc
directional inputs (with polarity).
e. Restricted 125 V
: 85 up to 150 Vdc. They are single-
dc
directional inputs (with polarity).
f. Restricted 220 V
: 165 up to 264 Vdc. They are single-
dc
directional inputs (with polarity).
5. Number of digital inputs/outputs:
a. Standard:
8 inputs (5 independent, 3 with a common point).
7 outputs (4 independent, 3 with a common point).
b. Extended: Adds to the standard:
9 inputs (6 independent, 3 with a common point).
7 outputs (4 independent, 3 with a common point).
c. Extended (option 2): adds to the standard:
5 independent inputs.
6 outputs (4 independent, 2 with a common point).
2 analog outputs (0 to 5 mA); for other ranges please
consult Ormazabal’s technical–commercial department.
6. Rear communication:
a. Glass optical fiber (GOF)
b. Plastic optical fiber (POF)
c. RS232
d. RS485
e. GFO + GFO
f. PFO + PFO
g. RS232 + RS232
h. RS485 + RS232
i. GFO + RS232
j. GOF + Ethernet (RJ45)
k. POF + Ethernet (OF)
l. RS232 + Ethernet (RJ45)
m. RS485 + Ethernet (RJ45)
In case of having two rear ports, the one mentioned in second
place is in parallel with the front RS232 (they occupy the same
port).
7. Analogue inputs:
The unit can have up to 9 analog inputs (through
transformer).– Preferential option.
Inputs 1, 2 and 3 are used for phase currents measurement.
Input 4 is used for neutral current measurement.
Input 5 depends on model. There are the next possibilities:
a. No input
b. Sensitive neutral or isolated neutral current
measurement
c. Zero sequence voltage measurement V
Inputs 6, 7 and 8 are used for the phase voltages measurement.
Input 9 depends on model. There are the next possibilities:
a. No input
b. Zero sequence voltage measurement V
Syncrocheck function
0
for the
0
IG-150-EN version 04; 03/10/16
11
General description General instructions
ekor.rps
1.6. Environmental conditions
1. Operating temperature: -10 up to 55 °C
2. Storage temperature: -40 up to 85 °C
3. Relative humidity: Up to 95 % without condensation
1.7. Tests
1.7.1. Electrical tests
1. Measurement of dielectric rigidity: Acc. to/IEC 255-5,
series C (2 kV, 1 min)
2. Measurement of insulation resistance: Acc. to/IEC255-5,
>10GΩ at 500 V
dc
3. Pulse (shock wave): Acc. to/IEC 255-5, appendix E, classIII
4. HF disturbances: Acc. to/IEC 255-22-1, class III
5. Fast transients: Acc. to/IEC 61000-4-4, class IV
6. Immunity to electrostatic discharges: Acc. to/IEC61000-4-2,
class IV
7. Voltage pulses: Acc. to/IEC 61000-4-5, class IV
8. Micro-cuts: Acc. to/IEC 60255-11, 100ms a 125V
9. Radiated electromagnetic interference:
Acc. to/EN 61000-6-4
10. Immunity to radiated elds: Acc. to/IEC 61000-4-3,
class III
11. Immunity to conducted: Acc. to/IEC 61000-4-6, class III
radiofrequency signals
12. Immunity to low frequency: Acc. to/IEC 61000-4-8
radiated elds
1.7.2. Environmental tests
1. Cold: Acc. to/IEC 68-2-1 (-40 °C)
2. Dry heat: Acc. to/IEC 68-2-2 (+85 °C)
3. Humid heat: Acc. to/IEC 68-2-3 (+70 °C, 93 % relative
4. Change of temperature: Acc. to/IEC 68-2-14 (-20°/70°C
two 4-hour cycles)
5. Operating range: -10 °C. up to 55 °C
humidity)
1.7.3. Mechanical tests
1. Vibration test: Acc. to/IEC 255-21-1 class II 2. Shock and bump test: Acc. to/IEC 255-21-1 class I
dc
1.8. CE Conformity
This product complies with the European Union directive
2014/30/EU on electromagnetic compatibility, and with
the IEC 60255 international regulations. The unit has been
designed and manufactured for use in industrial areas,
12
in accordance with EMC standards. This conformity is a
result of the test carried out in accordance with article 7 of
the Directive.
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
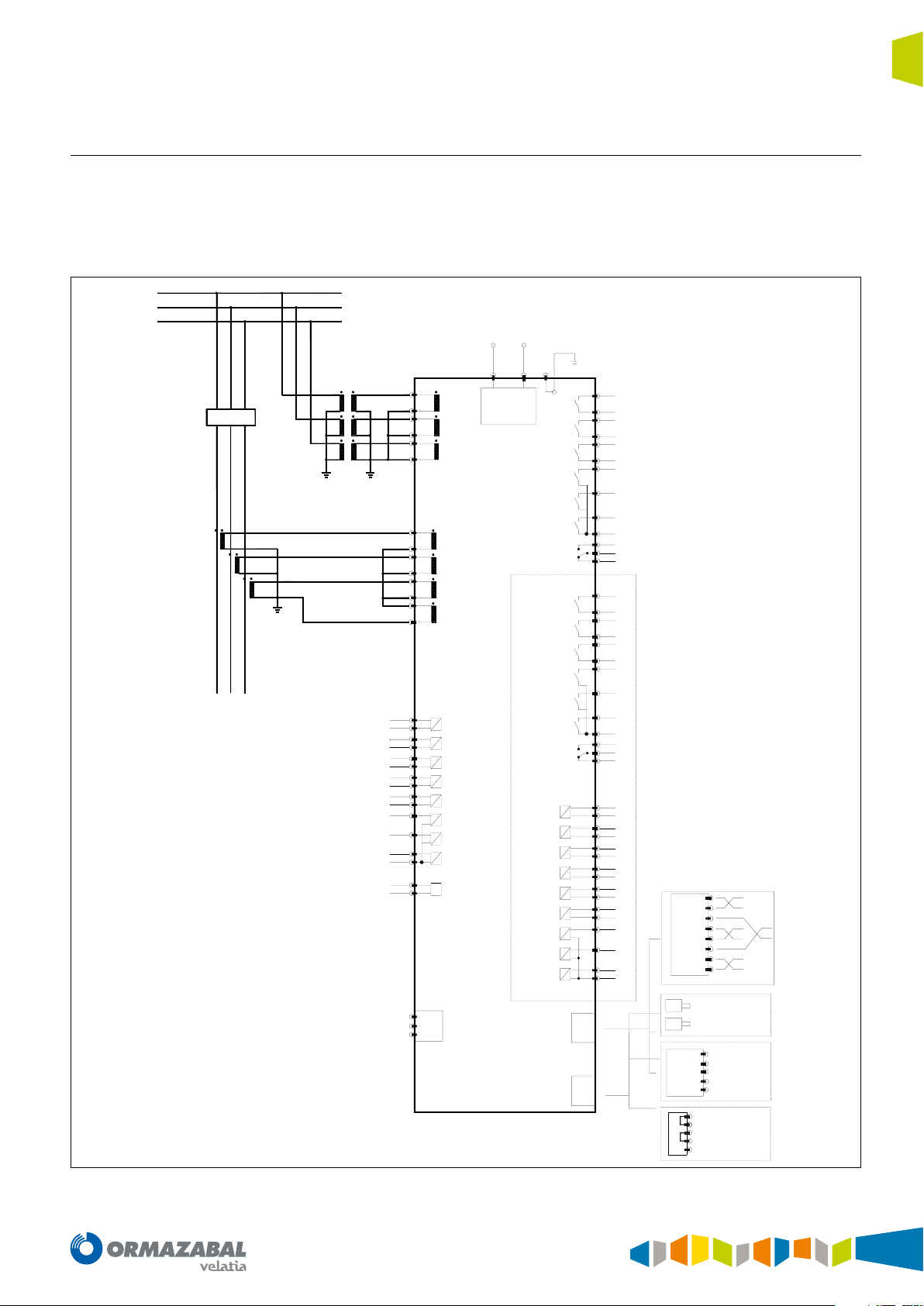
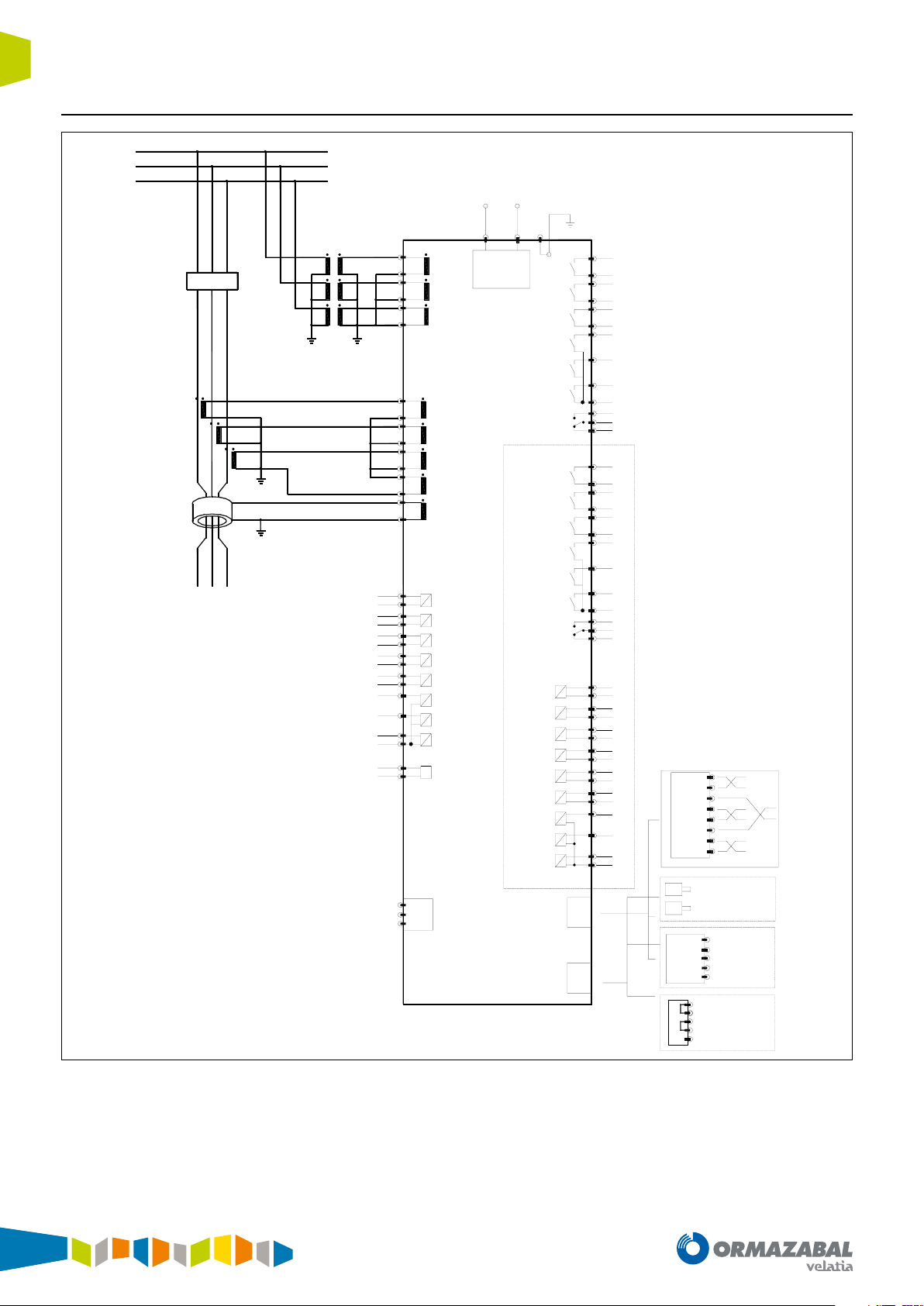
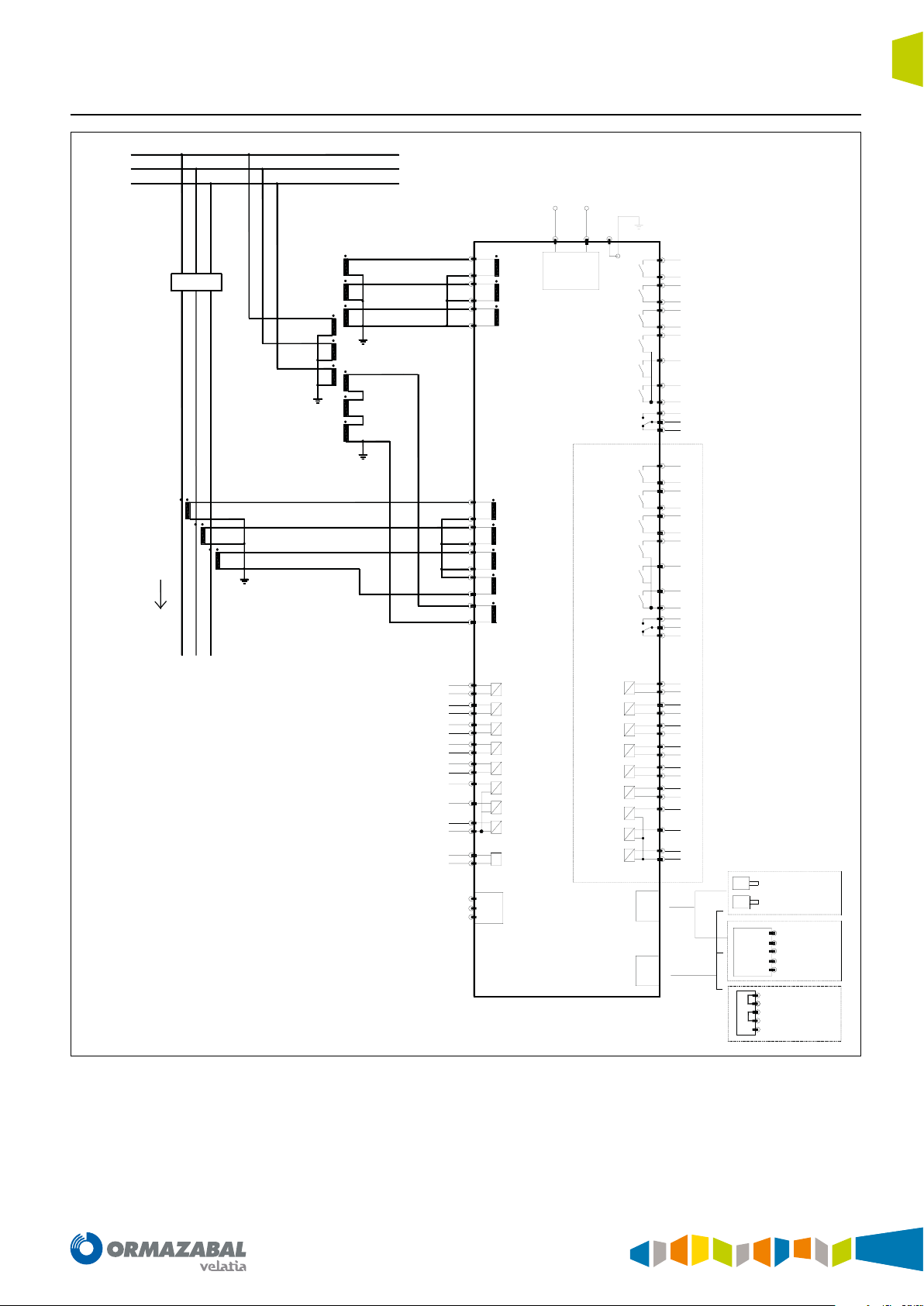
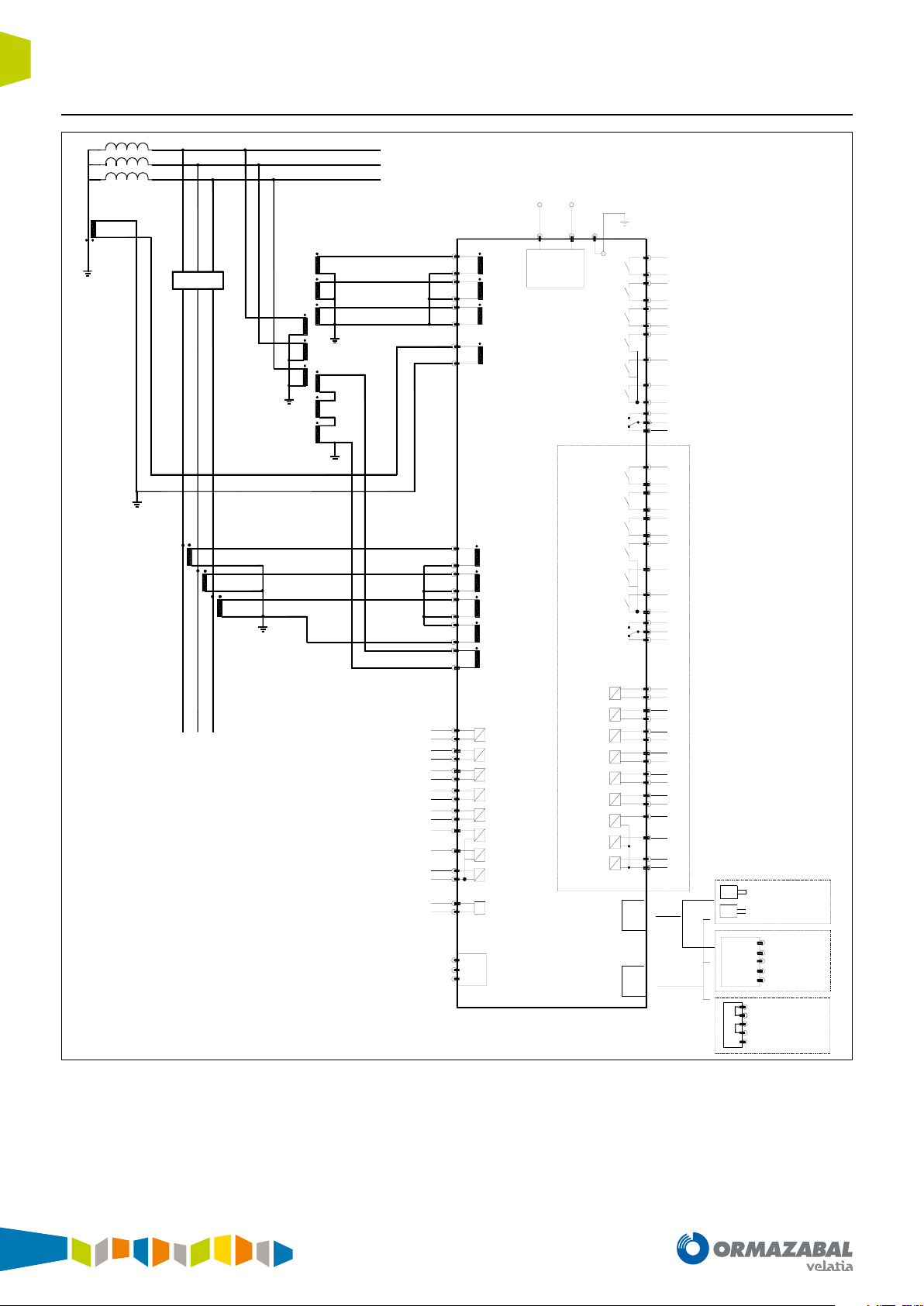
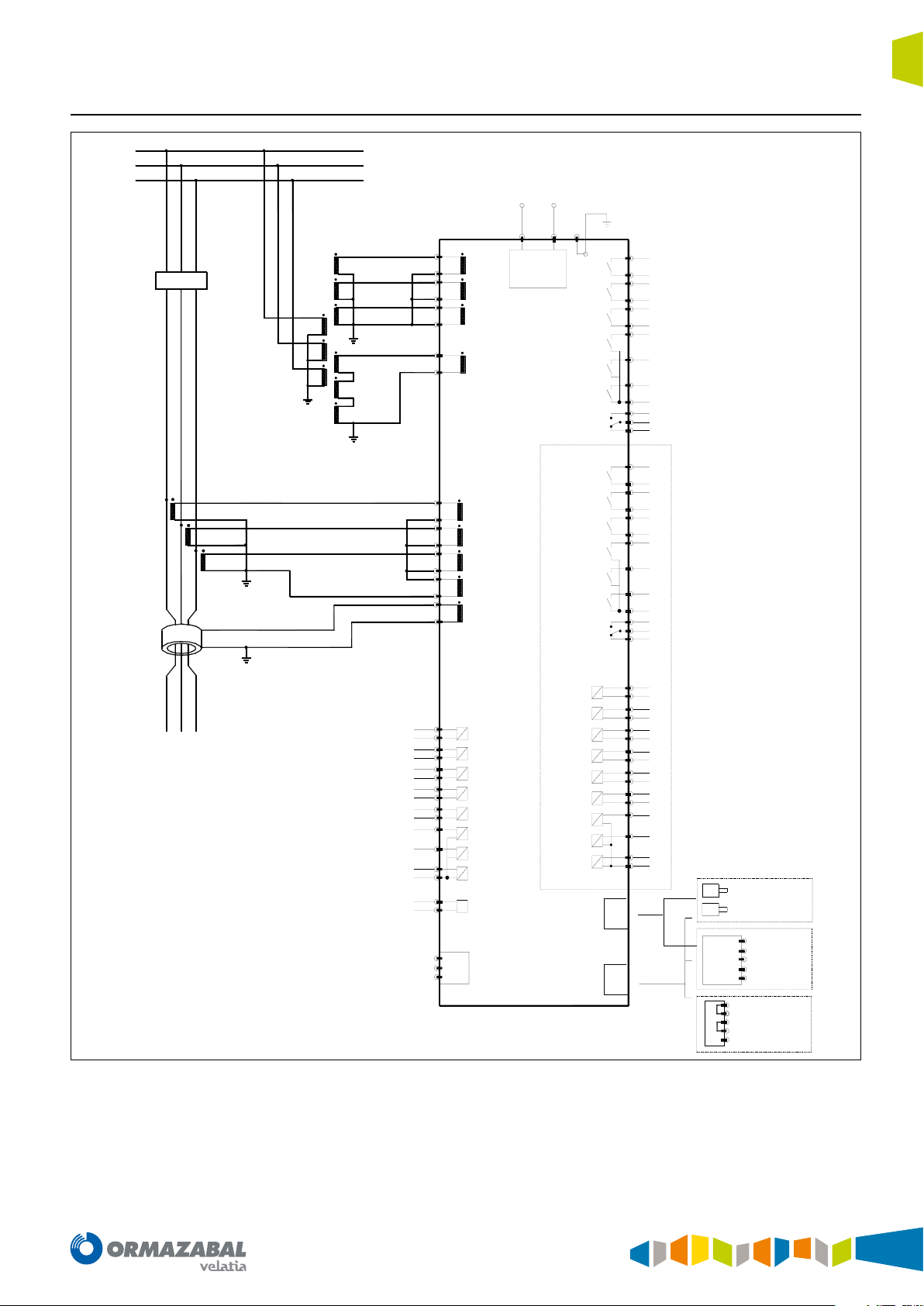
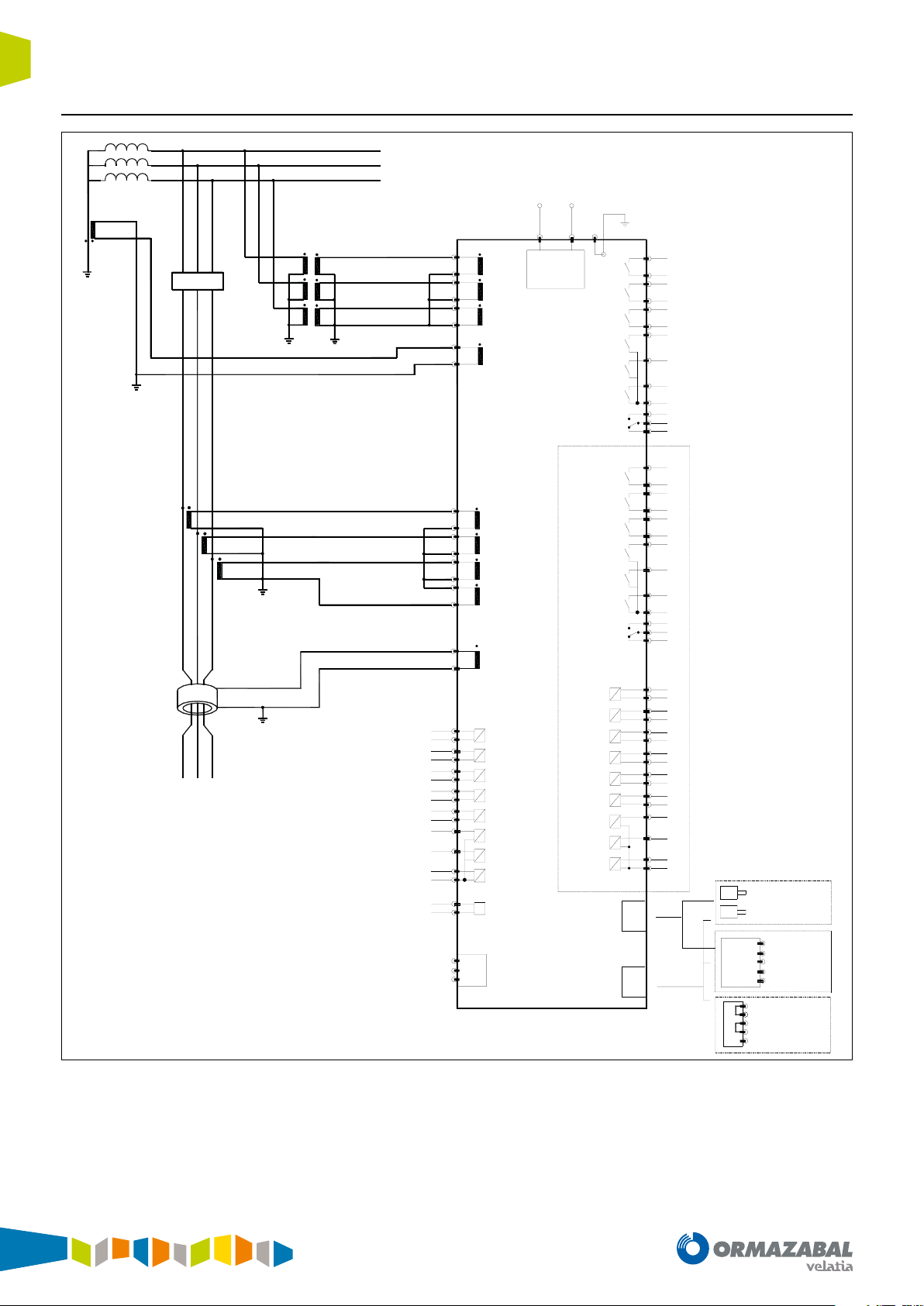
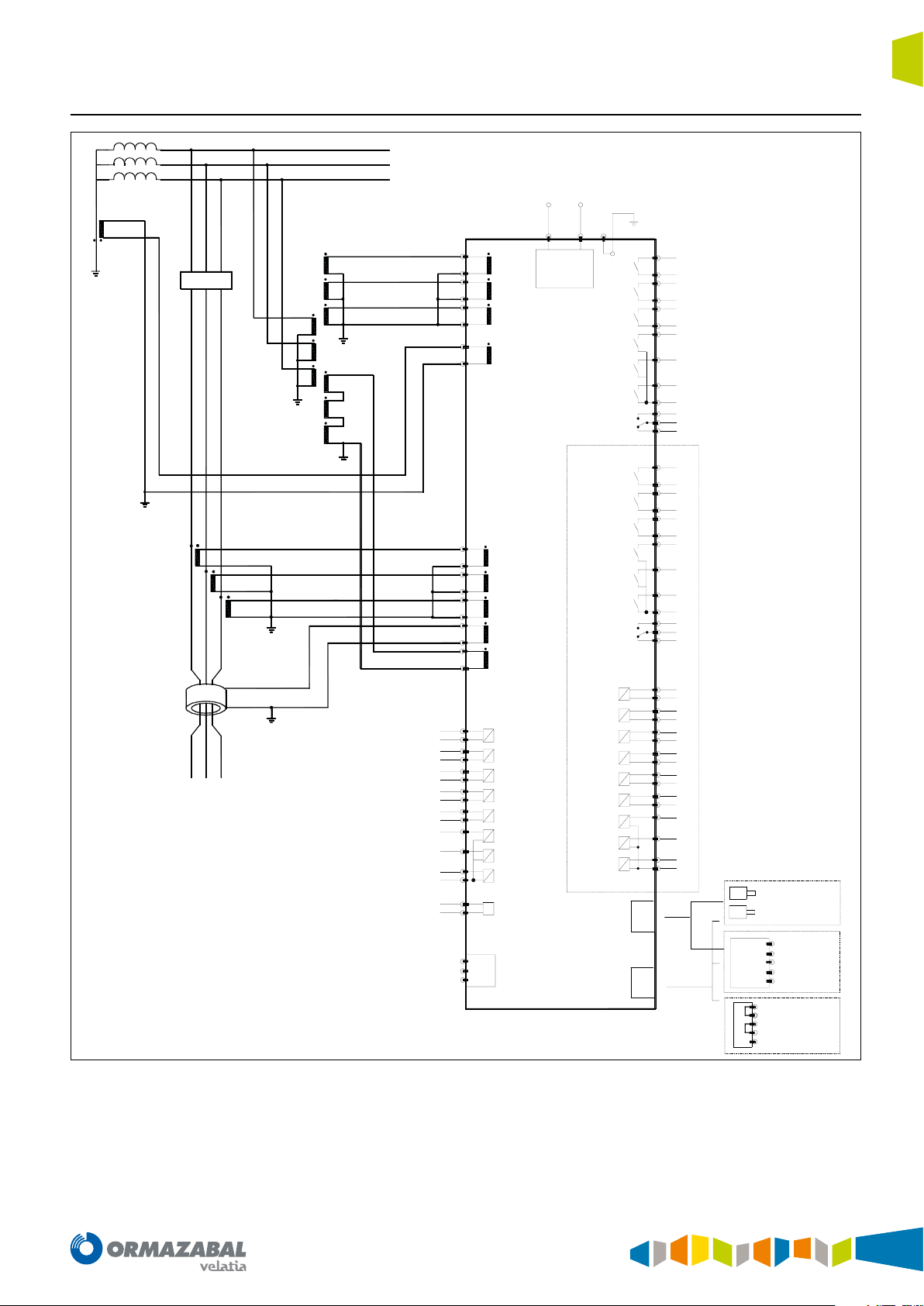
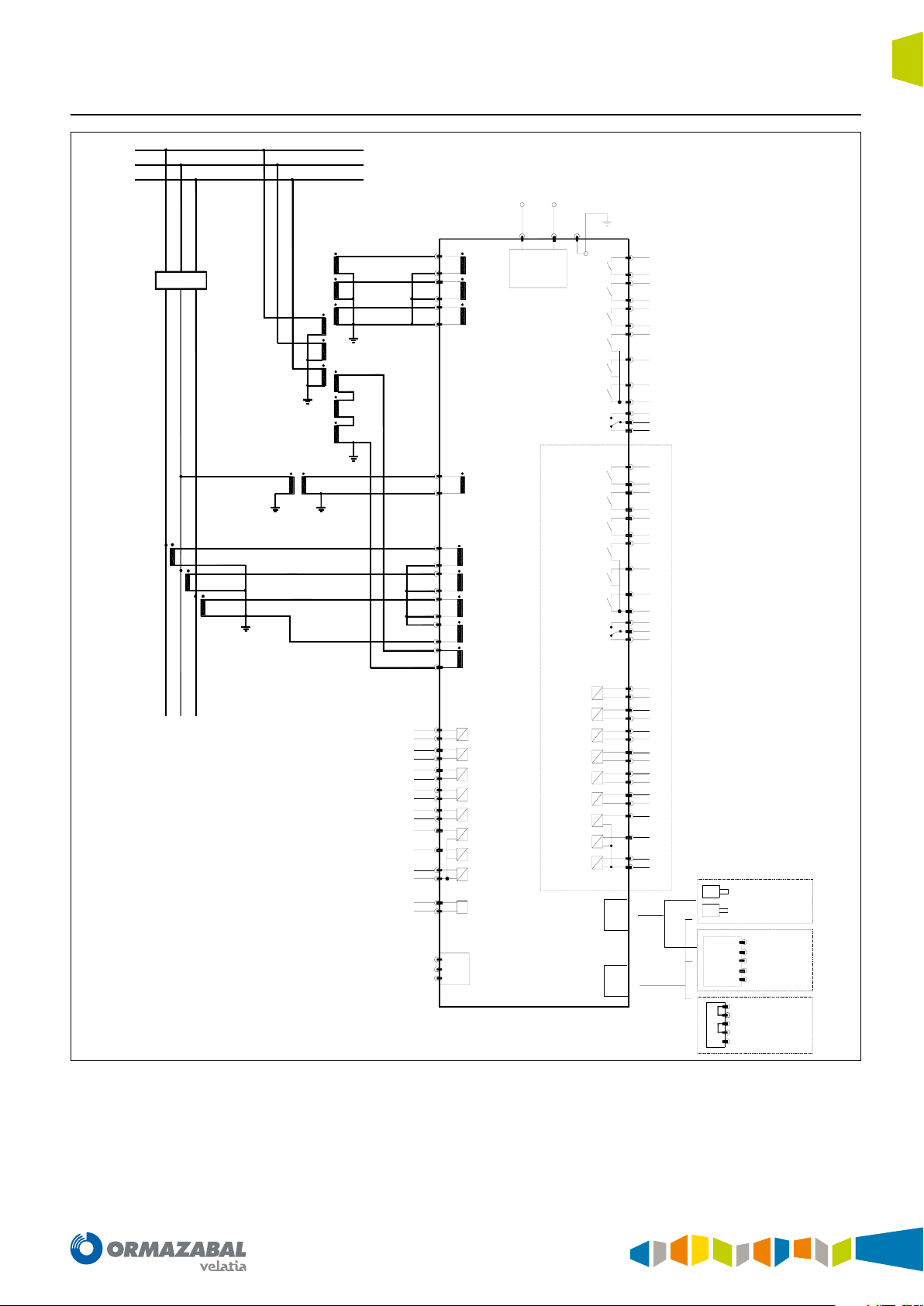
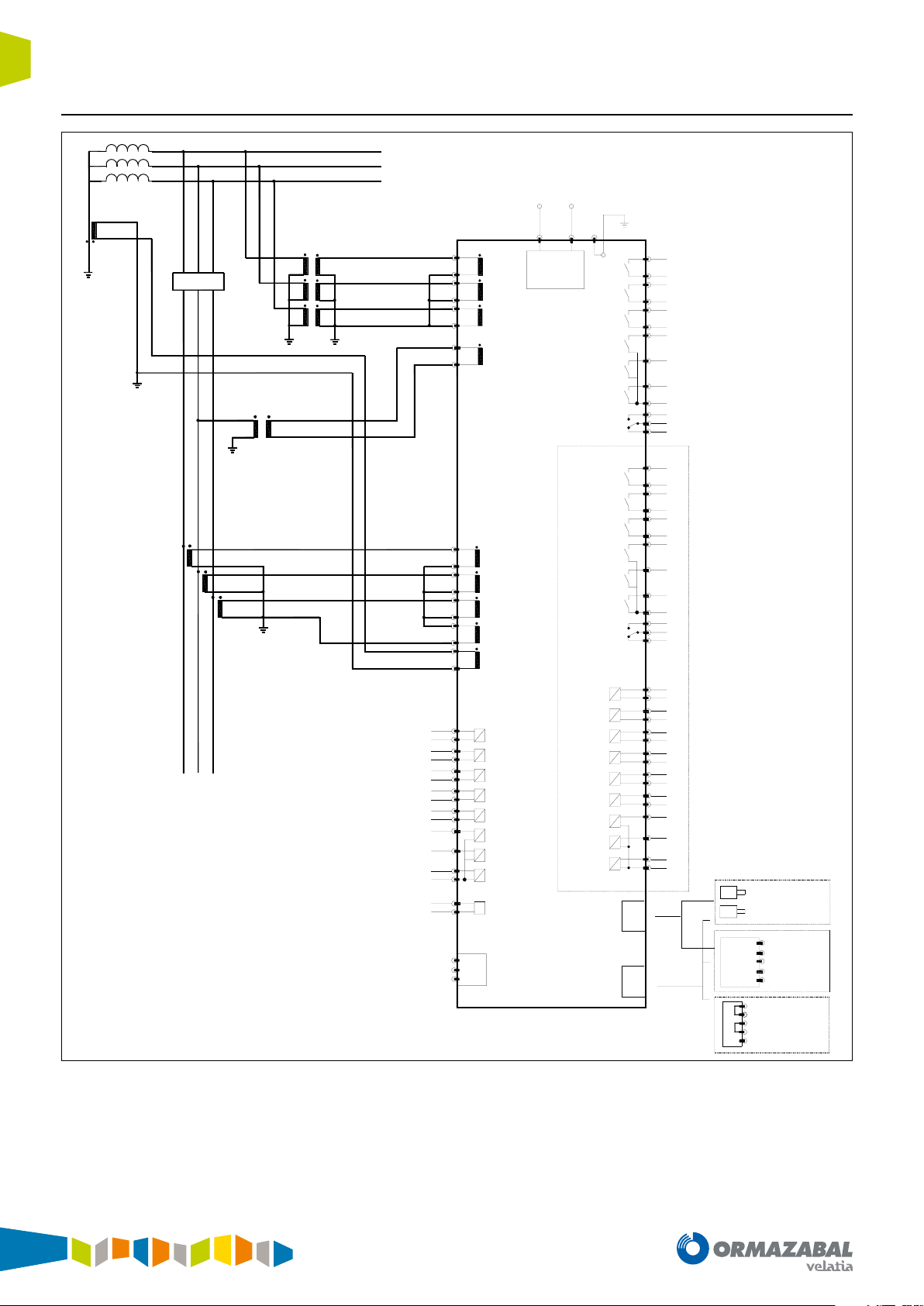
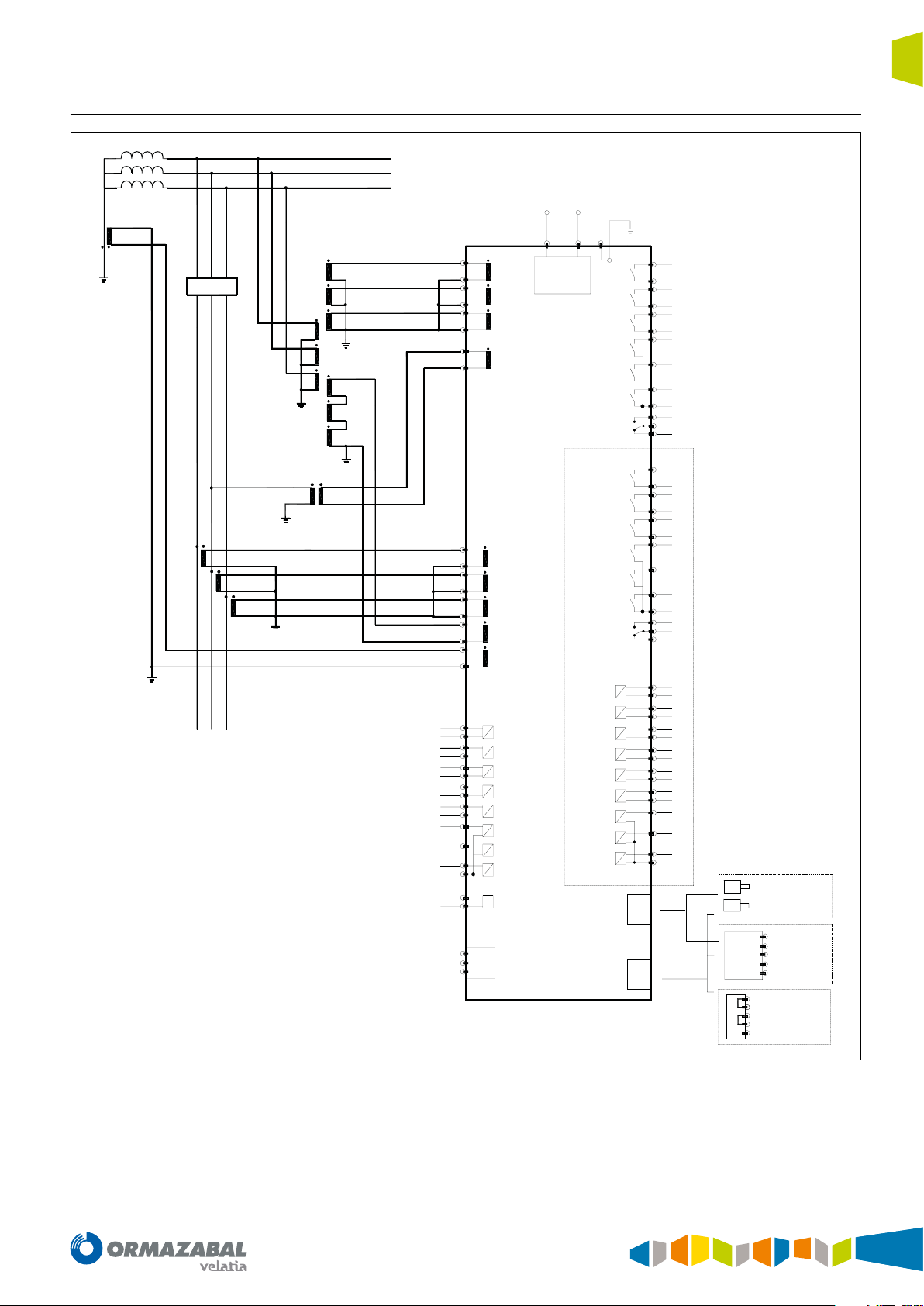
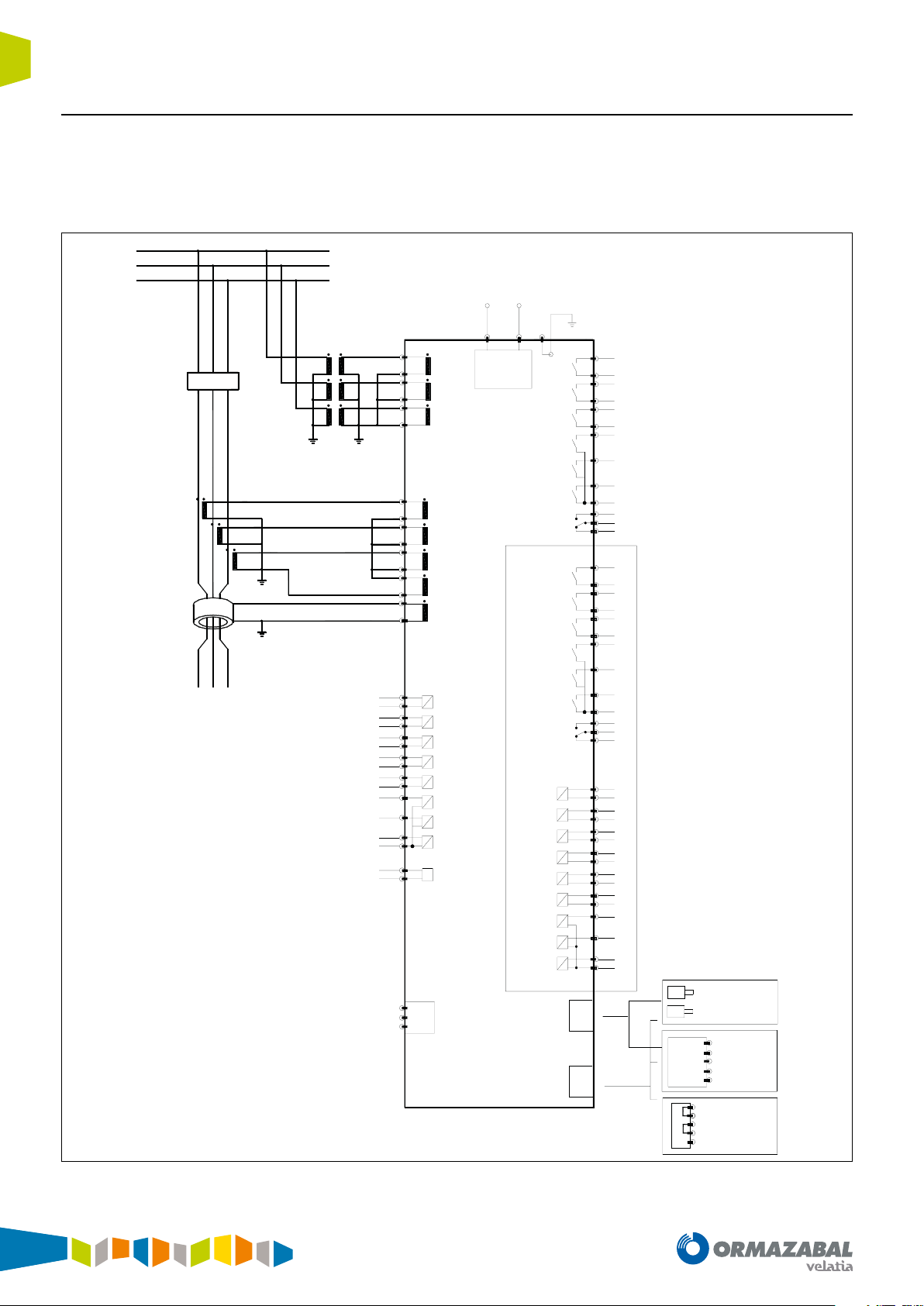
1.9. Wiring diagrams
General description
All the following wiring diagrams show one of the possible
digital input and output programming (very simple). See
all the possibilities in “programming of digital inputs” and
“programming of digital outputs” sections.
A
B
C
X3
11
T6 (VA)
Free
Free
Free
Free
Free
12
13
T7 (VB)
14
15
T8 (VC)
16
X3
1
T1 (IA)
2
3
T2 (IB)
4
5
T3 (IC)
6
7
T4 (IN)
8
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
+
16
-
52
CBA
BC
A
52 state
Close command
Open command
Synchronization
In the outputs with change-over contact the common point
is the middle one.
Phase sequence order is settable by keyboard/display
(See “other settings”-“protection denition”).
Power Supply Vdc
+-
XFA
23
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
1
DC/DC
OPT IONA L
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Ground trip
Free
Free
HW status
RJ45
1
Tx+
2
Tx -
3
Rx+
4
5
Rx-
6
7
8
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
Figure 1.2. nb and cr models
Port COM1
Rx 2
RS232
Tx 3
0V 5
Front
IG-150-EN version 04; 03/10/16
Port COM1
or Ethernet
Rear
OPTIONAL
Port COM2
Rear
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
GND
5
13
General description General instructions
ekor.rps
A
B
C
X3
11
Free
Free
Free
Free
Free
12
13
14
15
16
X3
1
2
3
4
5
6
7
8
9
10
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
+
16
-
52
CBA
OPTIONAL
BC
A
52 state
Close command
Open command
Synchronization
T6 (VA)
T7 (VB)
T8 (VC)
T1 (IA)
T2 (IB)
T3 (IC)
T4 (IN)
T5 (INS)
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Power Supply Vdc
XFA
23
DC/DC
+-
1
OPT IONA L
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Ground trip
Free
Free
HW status
RJ45
1
Tx+
2
Tx -
3
Rx+
4
5
Rx-
6
7
8
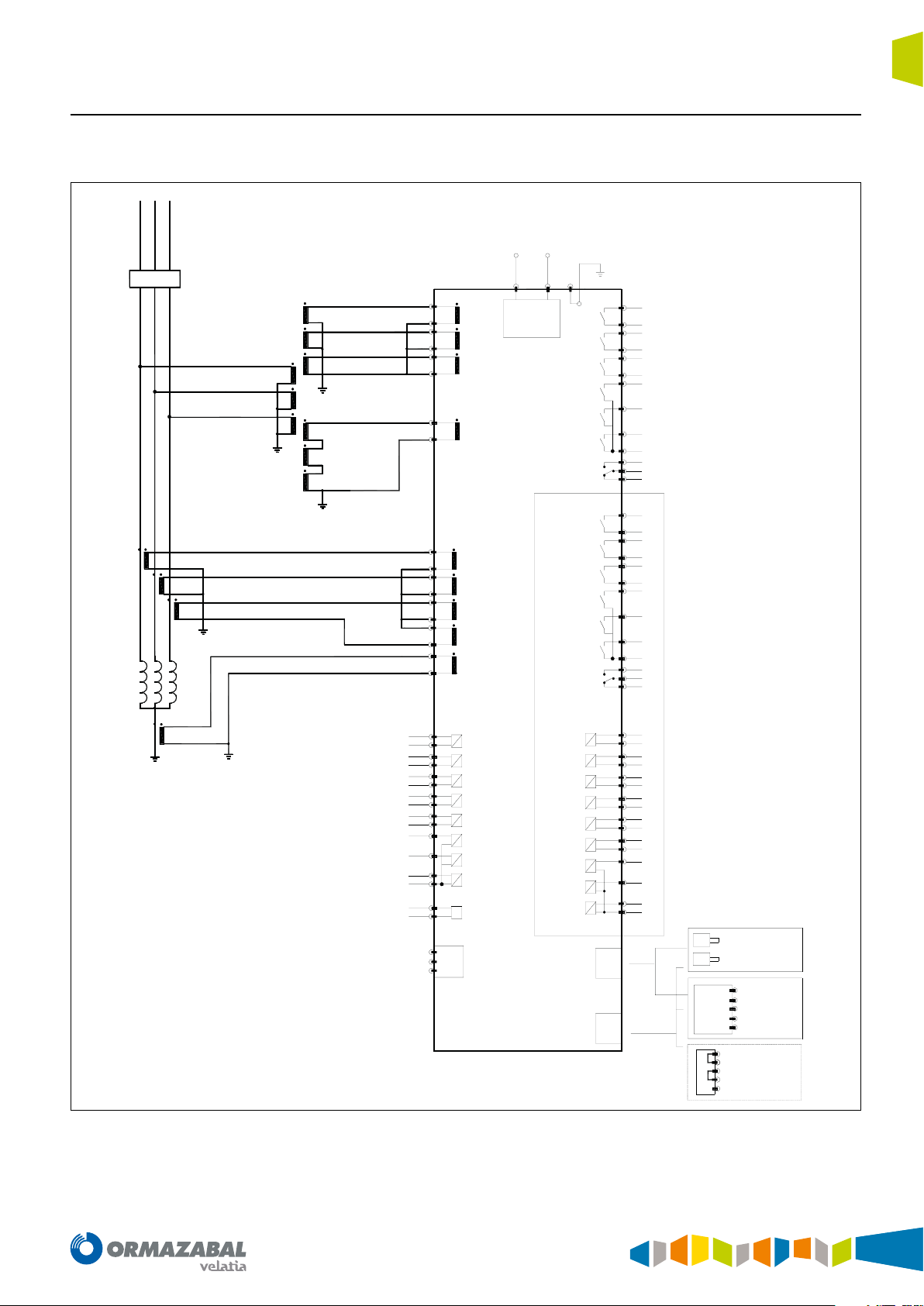
Figure 1.3. nc model
14
Rx 2
Tx 3
0V 5
Port COM1
RS232
Front
Port COM1
or Ethernet
Rear
OPTIONAL
Port COM2
Rear
IG-150-EN version 04; 03/10/16
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
GND
5

General instructions
ekor.rps
A
B
C
A
52
BC
General description
Power Supply Vdc
XFA
X3
11
12
13
CBA
14
15
16
OPTIONAL
X3
OPTIONAL
52 state
Close command
Open command
Free
Free
Free
12
Free
Free
Synchronization
T6 (TA)
T7 (TB)
T8 (TC)
17
T9 (SYN)
18
1
T1 (IA)
2
3
T2 (IB)
4
5
T3 (IC)
6
7
T4 (IN)
8
9
T5 (INS)
10
X1
1
2
3
4
5
6
7
8
9
10
11
13
14
15
16
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
+
IRIG-B
-
23
DC/DC
+-
1
OPTI ONAL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Ground trip
Free
Free
HW status
RJ45
1
Tx+
2
Tx -
3
Rx+
4
5
Rx-
6
7
8
Port COM1
Rx 2
Tx 3
RS232
0V 5
Front
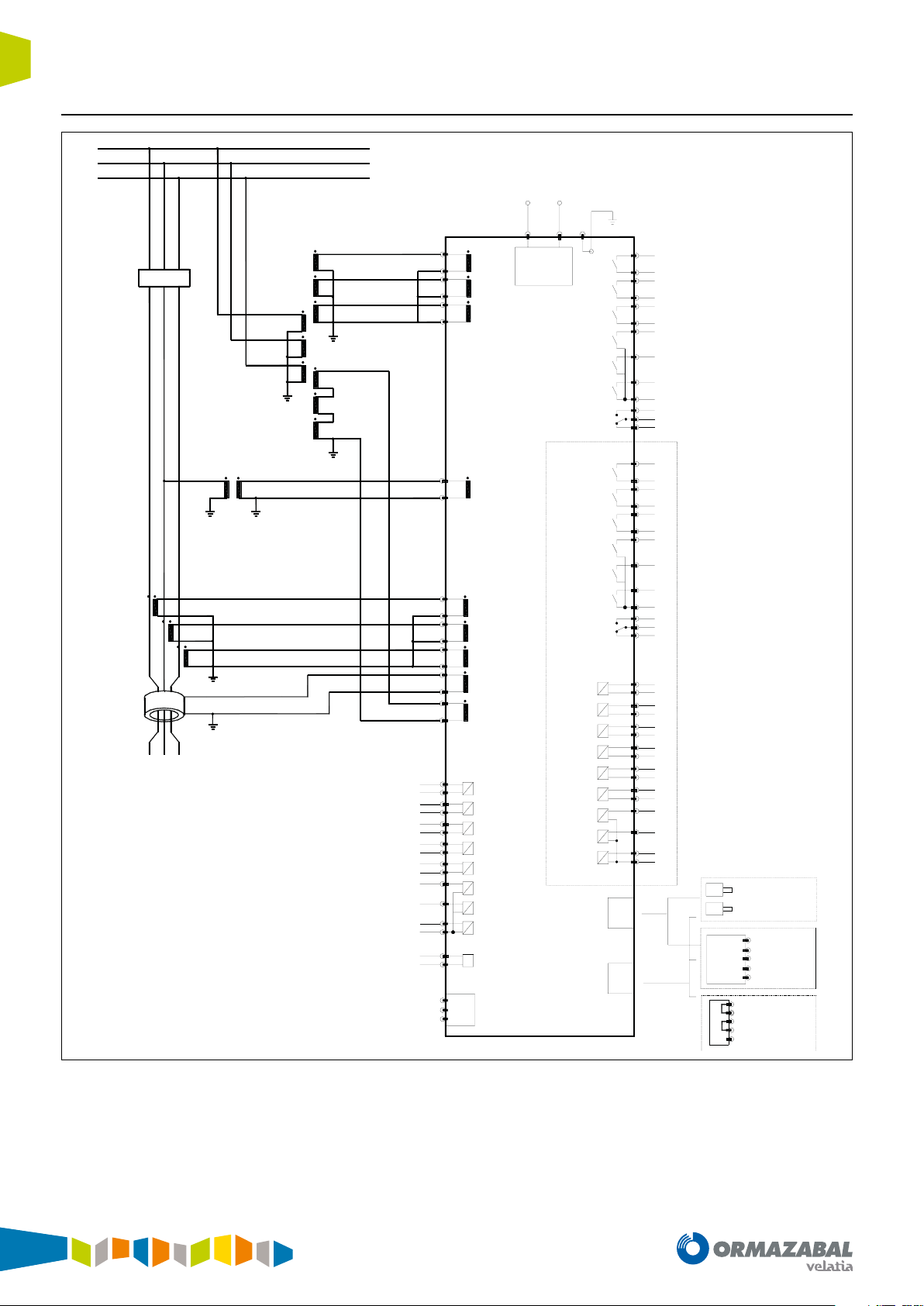
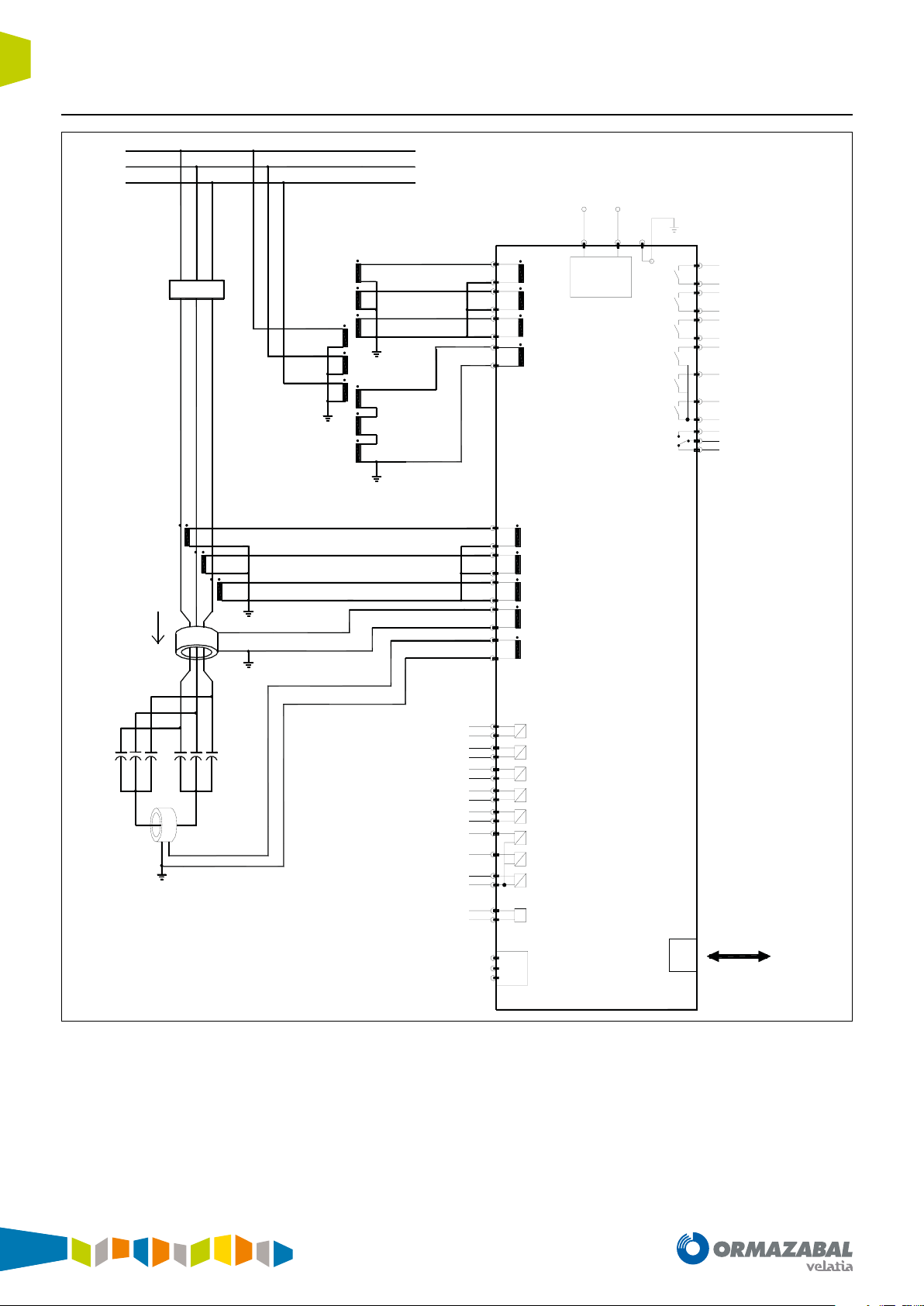
Figure 1.4. nd, ne, dd, de and df modelos (with V0 calculated, cod. ** **1*****01)
Although it is not represented, the Ethernet connection is also available in other diagrams.
“port 1” is COM 1 and “port 2” is COM 2.
IG-150-EN version 04; 03/10/16
Port COM1
or Ethernet
Rear
OPTIONAL
Port COM2
Rear
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
RS232
DTR 4
0V 5
RTS 7
1
+
2
RS485
3
4
5
GND
15
General description General instructions
ekor.rps
A
B
C
Power supply Vdc
+-
T6 (TA)
T7 (TB)
T8 (TC)
XFA
DC/DC
X3
11
52
CBA
12
13
14
15
16
Optional
X3
17
OPTIONAL
A
BC
52 state
Close command
Open command
Free
Free
Free
Free
Free
Synchronization
T9 (SYN)
18
X3
1
T1 (IA)
2
3
T2 (IB)
4
5
T3 (IC)
6
7
T4 (INS)
8
9
T5 (V0)
10
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
+
-
Rx 2
Tx 3
0V 5
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Port COM1
RS232
Front
23
Port COM1
Rear
OPTIONAL
Port COM2
Rear
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Neutral trip
Free
Free
HW state
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
5
GND
Figure 1.5. nd, ne, dd, de and df models (with Ir calculated, , cod. ** **1*****02)
16
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
A
B
C
52
CBA
Trip direction
Optional
General description
Power supply Vdc
X3
11
12
13
14
15
16
X3
1
2
3
4
5
6
7
8
9
10
XFA
T6 (TA)
T7 (TB)
T8 (TC)
T1 (IA)
T2 (IB)
T3 (IC)
T4 (IN)
T5 (V0)
23
DC/DC
+-
1
OP TI ON AL
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
BC
A
Figure 1.6. db model (cod. DB **1*****00)
52 status
Close order
Open order
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
+
IRIG-B
-
Port 1A
Rx 2
RS232
Tx 3
0V 5
Front
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
Port 1B
Rear
OPTIONAL
Port 2
Rear
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
GND
5
IG-150-EN version 04; 03/10/16
17
General description General instructions
ekor.rps
A
B
C
X3
11
52
CBA
12
13
14
15
16
17
18
OPTIONAL
X3
1
2
3
4
5
6
7
8
9
10
X1
1
BC
A
52 status
Close command
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
2
3
4
5
6
7
8
9
10
11
12
13
14
15
+
16
-
Rx 2
Tx 3
0V 5
Power supply Vdc
XFA
T6 (VA)
DC/DC
T7 (VB)
T8 (VC)
T9 (I0) polarization
T1 (IA)
T2 (IB)
T3 (IC)
T4 (IN)
T5 (V0)
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Port 1A
RS232
Front
+-
23
Port 1B
Rear
OPTIONAL
Port 2
Rear
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
Tx
Rx
GND
Glass O.F.
Plastic O.F.
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
5
Figure 1.7. db model with polarization by 67N current (cod. DB **1*****10)
18
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
A
B
C
52
CBA
OPTIONAL
General description
Power supply Vdc
XFA
X3
11
T6 (VA)
12
13
T7 (VB)
14
15
T8 (VC)
16
17
T9 (V0)
18
X3
1
T1 (IA)
2
3
T2 (IB)
4
5
T3 (IC)
6
7
T4 (IN)
8
9
T5 (INS)
10
23
DC/DC
+-
1
OP TI ON AL
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
BC
A
Figure 1.8. dc Model (cod. DC **1*****00)
52 status
Close command
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
X1
17
ED9
X1
1
ED1
2
3
ED2
4
5
ED3
6
7
ED4
8
9
10
11
12
13
14
15
16
ED5
ED6
ED7
ED8
+
IRIG-B
-
Port 1A
Rx 2
Tx 3
RS232
0V 5
Front
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
Port 1B
Rear
OPTIONAL
Port 2
Rear
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
RS232
DTR 4
0V 5
RTS 7
1
+
2
RS485
3
4
5
GND
IG-150-EN version 04; 03/10/16
19
General description General instructions
ekor.rps
A
B
C
X3
11
52
CBA
52 status
Close command
BC
A
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
12
13
14
15
16
17
18
X3
1
2
3
4
5
6
7
8
9
10
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
+
16
-
Rx 2
Tx 3
0V 5
Power supply Vdc
XFA
T6 (VA)
DC/DC
T7 (VB)
T8 (VC)
T9 (I0) polarization
T1 (IA)
T2 (IB)
T3 (IC)
T4 (IN)
T5 (INS)
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Port 1A
RS232
Front
+-
23
Port 1B
Rear
OPTIONAL
Port 2
Rear
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
Tx
Rx
Glass O.F.
Plastic O.F.
Rx 2
Tx 3
RS232
DTR 4
0V 5
RTS 7
1
+
2
RS485
3
4
GND
5
Figure 1.9. dc model with polarization with 67N current (V0 calculated, cod. DC **1*****11)
20
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
A
B
C
52
BC
A
General description
Power supply Vdc
XFA
X3
11
T6 (VA)
12
13
T7 (VB)
CBA
14
15
T8 (VC)
16
17
18
T9 (I0) polarization
OP TI ON AL
X3
1
T1 (IA)
2
3
T2 (IB)
4
5
T3 (IC)
6
7
T4 (INS)
8
9
T5 (V0)
10
X1
52 status
Close command
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
+
IRIG-B
-
Port 1A
Rx 2
RS232
Tx 3
0V 5
Front
23
DC/DC
+-
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
Port 1B
Rear
OPTIONAL
Port 2
Rear
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
Tx
Rx
GND
Glass O.F.
Plastic O.F.
Rx 2
Tx 3
RS232
DTR 4
0V 5
RTS 7
1
+
2
RS485
3
4
5
Figure 1.10. dc model with polarization with 67N current (Ir calculated, cod. DC **1*****12)
IG-150-EN version 04; 03/10/16
21

General description General instructions
ekor.rps
A
B
C
X3
11
52
CBA
52 status
Close command
B
C
A
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
12
13
14
15
16
17
18
X3
1
2
3
4
5
6
7
8
9
10
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
+
16
-
Rx 2
Tx 3
0V 5
Power supply Vdc
XFA
T6 (VA)
T7 (VB)
T8 (VC)
T9 (VSYNC)
T1 (IA)
T2 (IB)
T3 (IC)
T4 (INS)
T5 (I0)
(polarization)
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Port COM1
RS232
Front
23
DC/DC
+-
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
Port COM1
Rear
OPTIONAL
Port COM2
Rear
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
General trip
2
3
Close
4
5
Phase trip
6
7
Neutral trip
8
Not configured
9
Not configured
10
11
12
HW status
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
5
GND
Figure 1.11. dd, de and df models with polarization by 67N current (Ir and V0 calculated, cod. ** **1*****13)
22
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
A
B
C
52
CBA
BC
A
OPTIONAL
Close command
Open command
Synchronization
52 status
Not configured
Not configured
Not configured
Not configured
Not configured
General description
Power supply Vdc
XFA
X3
11
T6 (VA)
12
13
T7 (VB)
14
15
T8 (VC)
16
OP TI ON AL
17
T9 (VSYNC)
18
X3
1
T1 (IA)
2
3
T2 (IB)
4
5
T3 (IC)
6
7
T4 (IN)
8
9
T5 (V0)
10
X1
1
ED1
2
3
ED2
4
5
ED3
6
7
ED4
8
9
+
-
Rx 2
Tx 3
0V 5
ED5
ED6
ED7
ED8
IRIG-B
Port COM1
RS232
Front
10
11
12
13
14
15
16
23
DC/DC
+-
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
Port COM1
Rear
OPTIONAL
Port COM2
Rear
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
Tx
Rx
Glass O.F.
Plastic O.F.
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
GND
5
Figure 1.12. ib, ic models (cod. I* **1*****00)
IG-150-EN version 04; 03/10/16
23
General description General instructions
ekor.rps
A
B
C
X3
11
52
CBA
52 status
Close command
B C
A
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
12
13
14
15
16
17
18
X3
1
2
3
4
5
6
7
8
9
10
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
+
16
-
Rx 2
Tx 3
0V 5
Power supply Vdc
XFA
T6 (VA)
T7 (VB)
T8 (VC)
T9 (VSYNC)
T1 (IA)
T2 (IB)
T3 (IC)
T4 (IN)
T5 (I0)
(polarization)
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Port COM1
RS232
Front
23
DC/DC
+-
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
Port COM1
Rear
OPTIONAL
Port COM2
Rear
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
Tx
Rx
+
GND
-
Rx 2
Tx 3
DTR 4
0V 5
RTS 7
Glass O.F.
Plastic O.F.
RS232
1
2
RS485
3
4
5
Figure 1.13. ib, ic models with polarization by 67N current (V0 calculated, cod. I* **1*****11)
24
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
A
B
C
52
BC
A
General description
Power supply Vdc
XFA
X3
11
T6 (VA)
12
13
T7 (VB)
CBA
14
15
T8 (VC)
16
17
T9 (VSYNC)
18
OP TI ON AL
X3
1
T1 (IA)
2
3
T2 (IB)
4
5
T3 (IC)
6
7
T4 (V0)
8
9
T5 (I0)
(polarization)
10
X1
52 status
Close command
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
+
-
Rx 2
Tx 3
0V 5
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Port COM1
RS232
Front
23
DC/DC
+-
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
Port COM1
Rear
OPTIONAL
Port COM2
Rear
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
General trip
2
3
Close
4
5
Phase trip
6
7
Neutral trip
8
Not configured
9
Not configured
10
11
12
HW status
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Tx
Glass O.F.
Rx
Plastic O.F.
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
GND
5
Figure 1.14. ib, ic models with polarization by 67N current (Ir calculated, cod. I* **1*****12)
IG-150-EN version 04; 03/10/16
25
General description General instructions
ekor.rps
Special Models
Some special models only have its functionality as special.
For example, the wiring diagram of E1 type models is the
same as that of NC family.
A
B
C
X3
11
12
13
14
15
16
X3
1
2
3
4
5
6
7
8
9
10
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
+
-
16
A
52
BC
CBA
OP TI ON AL
52 status
Close command
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
T6 (VA)
T7 (VB)
T8 (VC)
T1 (IA)
T2 (IB)
T3 (IC)
T4 (IN)
T5 (INS)
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Power supply Vdc
XFA
23
DC/DC
+-
1
OP TI ON AL
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
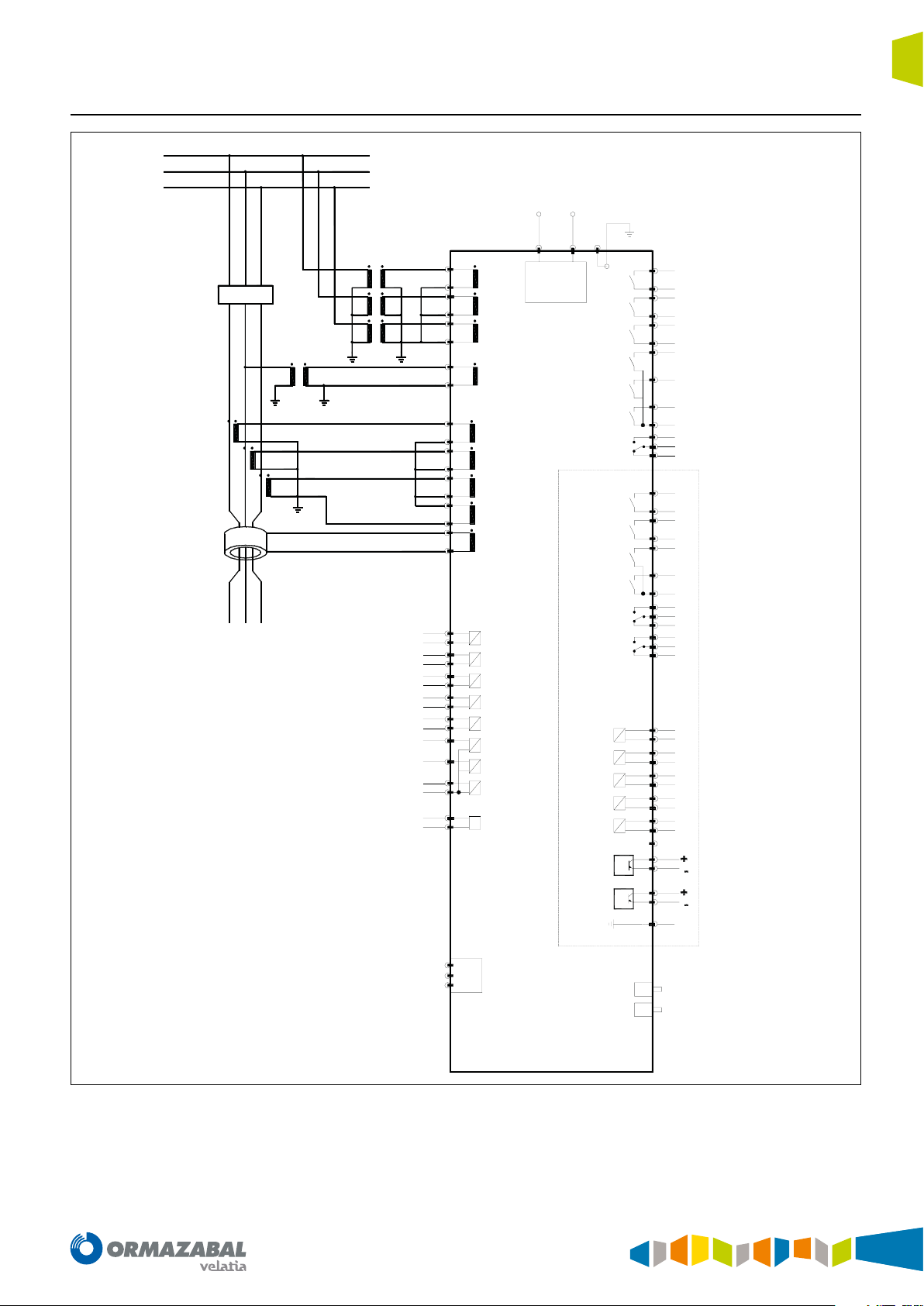
Figure 1.15. EH3030/EH8030 model (special type E1)
26
Port 1A
Rx 2
RS232
Tx 3
0V 5
Front
Port 1B
Rear
OPTIONAL
Port 2
Rear
Glass O.F.
IG-150-EN version 04; 03/10/16
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
GND
5
General instructions
ekor.rps
Sometimes, the units can be used with wiring dierent to
those indicated. Examples:
B
C
A
General description
Power supply Vdc
52
CBA
X3
11
12
13
14
15
16
17
18
X3
1
2
3
4
5
6
7
8
9
10
XFA
T6 (VA)
T7 (VB)
T8 (VC)
T9 (V0)
T1 (IA)
T2 (IB)
T3 (IC)
T4 (IN)
T5 (INS)
23
DC/DC
+-
1
OP TI ON AL
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
1
2
3
4
5
6
7
8
9
10
11
12
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
General trip
Close
Phase trip
Neutral trip
Not configured
Not configured
HW status
Figure 1.16. EH3018 model (special type E2)
52 status
Close command
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
+
-
Rx 2
Tx 3
0V 5
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
IRIG-B
Port COM1
RS232
Front
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
Port COM2
Rear
Port COM1
Rear
OPTIONAL
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Tx
Glass O.F.
Plastic O.F.
Rx
Rx 2
Tx 3
DTR 4
RS232
0V 5
RTS 7
1
+
2
RS485
3
4
5
GND
IG-150-EN version 04; 03/10/16
27
General description General instructions
ekor.rps
A
B
C
Power supply Vdc
+-
Trip
direction
X3
11
52
CBA
12
13
14
15
16
17
18
X3
1
2
3
4
5
6
7
8
9
10
XFA
T6
T7
T8
T9
T1
T2
T3
T4
T5
23
DC/DC
1
SD1
SD2
SD3
SD4
SD5
SD6
SD7
X2
1
General trip
2
3
Close
4
5
Phase trip
6
7
Neutral trip
8
Instantaneous trip
9
Unbalance trip
10
11
12
HW status
13
Figure 1.17. EH8007 model (special type E3)
52 status
Trip coil 52 close supervision
Trip coil 52 open supervision
Close coil 52 close supervision
Close coil 52 open supervision
Not configured
Not configured
Not configured
Synchronization
X1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
+
IRIG-B
-
Port 2
Port 1
Rx 2
RS232
Tx 3
0V 5
Front
TTL level
Internal communication
with TCP’s CPU
28
IG-150-EN version 04; 03/10/16
General instructions
ekor.rps
A
B
C
Power supply Vdc
+-
General description
XFA
X3
11
52
CBA
OP TI ON AL
12
13
14
15
16
17
18
X3
OP TI ON AL
10
X1
A
BC
52 status
Close command
Open command
Not configured
Not configured
Not configured
Not configured
Not configured
Synchronization
10
11
12
13
14
15
16
T6 (TA)
T7 (TB)
T8 (TC)
T9 (SYN)
1
T1 (IA)
2
3
T2 (IB)
4
5
T3 (IC)
6
7
T4 (IN)
8
9
T5 (INS)
1
2
3
4
5
6
7
8
9
ED1
ED2
ED3
ED4
ED5
ED6
ED7
ED8
+
IRIG-B
-
23
DC/DC
1
SD1
SD2
SD3
SD4
SD5
SD6
SD7
SD8
SD9
SD10
SD11
SD12
SD13
OP TI ON 2
ED9
ED10
ED11
ED12
ED13
SA1
SA2
X2
1
General trip
2
3
Close
4
5
Phase trip
6
7
Neutral trip
8
Sensitive neutral trip
9
Not configured
10
11
12
HW status
13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Figure 1.18. EH3211 model (special type E4)
Port COM1
Rx 2
Tx 3
RS232
0V 5
Front
IG-150-EN version 04; 03/10/16
Port COM2
Rear
Glass O.F.
Tx
Rx
29
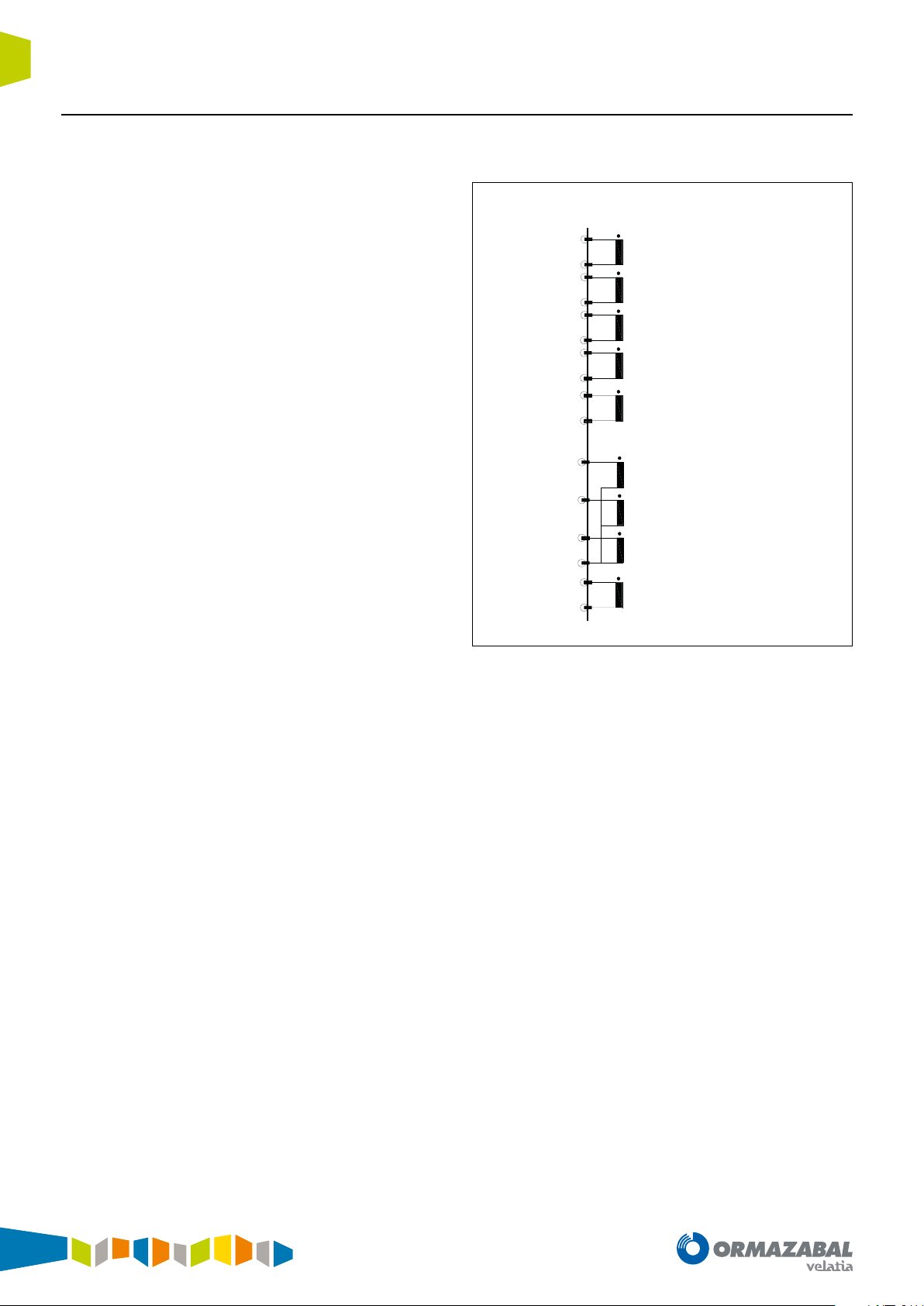
General description General instructions
ekor.rps
The terminal numbers indicated in the previous wiring
diagrams is for units with pin type terminals. If the units
have closed type terminals, the only dierence lies on those
terminals corresponding to T6 and T9 transformers, because
VA, VB and VC measurement transformers, have a common
point (that is, compound voltages cannot be connected
with closed type terminals, but only single voltages can..
Connections of the analogue inputs in models with
closed type terminals:
X3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
T1 (IA)
T2 (IB)
T3 (IC)
T4 (IN)
T5 (V or I ac. to model)
T6 (TA)
T7 (TB)
T8 (TC)
T9 (V or I ac. to model)
Figure 1.19. Connections of the analogue inputs
30
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Connection of the extension cards (optional)
General description
1
N
O
I
T
P
O
SD8
SD9
SD10
SD11
SD12
SD13
SD14
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
2
N
O
I
T
P
O
SD8
SD9
SD10
SD11
SD12
SD13
X2
14
15
16
17
18
19
20
21
22
23
24
25
26
ED9
ED10
ED11
ED12
ED13
ED14
ED15
ED16
ED17
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
ED9
ED10
ED11
ED12
ED13
SA1
SA2
X1
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
Figure 1.20. 9 digital inputs (DI) + 7 digital outputs (DO)
Figure 1.21. 5 DI + 6 DO + 2 analog outputs (AO)
IG-150-EN version 04; 03/10/16
31

General description General instructions
(opt ional
(opt io
ekor.rps
LCD
RS23 2
Port 1 - 1
Port 1 - 2
Port 1 - 2
(opt ional)
FOC/ RS232
FOC/ RS485
Disp lay
(RS2 32)
Keyb oard
RAM
8 MB
(din amic)
RAM
2 MB
(sta tics)
2 MB
FLAS H
Cloc k
uP
LEDs
Rela ys
Digi tal
Push –butt.
outp uts
Addr ess/dat a bus
PLD
inpu t
IRIG -B
inpu ts
Prog rammabl e
Lowp ass
Figure 1.22. Blocks diagramm
SPI
Comm unic.
DSP
Wave makers
ampl ifiers
Filt ers
)
A
I
I
C
B
I
I
NS
N
I
A
V
B
V
C
V
nal)
SYNC
V
32
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
2. Hardware
2.1. Constructive characteristics. Horizontal box (ekor.rps-h)
Figure 2.1. Unit’s external dimensions [mm]
Hardware
Figure 2.2. Panel cut-o in mm
IG-150-EN version 04; 03/10/16
33

Hardware General instructions
ekor.rps
2.2. Constructive characteristics (ekor.rps-tcp)
Figure 2.3. Unit’s external dimensions [mm]
Figure 2.4. Panel cut-o in mm
34
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
2.3. Rear terminals
Hardware
Figure 2.5. Standard (all for pin type terminals)
Figure 2.6. Option with closed type terminals for analog inputs
IG-150-EN version 04; 03/10/16
35

Hardware General instructions
ekor.rps
2.4. Options for rear communications ports
OF (glass or plastic) RS-485 RS-232
Figure 2.7. Single port
Figure 2.8. Double port
36
OF + OF RS-485+RS-232 RS-232+RS-232 OF+RS232 Ethernet OF + OF
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Hardware
Figure 2.9. Ethernet
Ethernet RJ45+ OF Eth.RJ45+RS232 Eth.RJ45+RS485
IG-150-EN version 04; 03/10/16
37

Hardware General instructions
ekor.rps
2.5. RS485 connection detail between some units
Although there is an internal connection in the unit
between 1 and 2 pin and between pin number 3 and 4, if
a connection is done on the bus side, as it is shown in the
2
1
3
gure, a unit can be removed without causing a loss in the
chain continuity.
4
2
2
5
7
2
2
7
Computer
1
Screen
2
Network end R 120 Ohms
3
DB9 Female type rear connector (in the unit)
4
Screened twisted pair
5
Last unit
6
ekor.rps unit
7
Rest of DB9 connector terminals without inner connection
8
Figure 2.10. RS485 connection
6
2
3
7
8
38
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
2.6. Connection between fiber optic and a radio modem
The contact of the ekor.rps protection is made by
programming a digital output such as “RTS control”.
12 3
4
Hardware
ekor.rps
1
FO/RS232 converter
2
Radio
3
RTS (contact)
4
+12 Vdc (aprox)
5
Figure 2.11. Connection between ber optic
5
IG-150-EN version 04; 03/10/16
39

Hardware General instructions
∆
−
−
MEPCPP
l
ekor.rps
2.7. Ethernet communication
2.7.1. Ethernet via GOF
The optic channels characteristics are the following:
1. Baud rate: 100 Mb
2. Connector: ST
3. Optical transmitter: LED
4. Optical receiver: PIN photodiode
5. Optical output: Non-modulated
6. Wave length: Glass λ
7. Plastic λ
8. BER: δ10
=660mm
c
-9
=820mm
c
9. Glass optic ber multimode: 62.5/125μm
10. Temperature range values from –20°C to+85°C
11. Losses according to the type of ber
Maximum
losses
allowed
Glass
62.5/125μm
Table 2.2. Pérdidas según el tipo de bra
8db 4db 0.5db
Losses km
Connection
losses
2.7.2. Ethernet via RJ45 cable
12. The maximum transmission distance is calculated as
follows:
=
where: PP = Losses in the link
PC = Additional connection insertion losses
ME = Aging margin should be 3 db
Δ = Cable attenuations in db/Km
13. Maximum distance that can be reached:
In the worst
possible
conditions
Cristal 62,5/125μm
Table 2.3. Maximum distance that can be reached
1.25km 4km
In the best
possible
conditions
1. Interface per 600 ohms impedance transformer
2. Insulation 500 V
3. RJ45 connector (female)
4. Communication speed: 10/100 Mb
5. Cable type: Screened
6. Cable length: 100 m maximum
40
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
2.8. Technical characteristics
2.8.1. Power Supply
Hardware
1. Models with 24–48V
a. Operating range: 18up to60V
2. Models with 125–220V
dc
dc
dc
a. Operating range: 86up to280V
2.8.2. Output Contacts
Relays 1 to 6 and 8 to 13:
1. Carry: + 5 A up to + 25 °C
2. Make (0.5 s): 30 A
3. Breaking capacity (resistive load)
a. for 220 Vdc: 0.4 A
dc
: 1 A
dc
: 3 A
b. for 125 V
c. for 48 V
4. Breaking capacity (L/R = 40 ms)
a. for 220 Vdc: 0.2 A
b. for 125 V
c. for 48 V
dc
: 0.5 A
dc
: 0.3 A
2.8.3. Digital inputs (optoisolated)
3. Consumption: 8W minimum
18W maximum
dc
Relays 7 to 14:
1. Carry: + 5 A up to + 25 °C
2. Make (0.5 s): 30 A
3. Breaking capacity ( resistive load)
a. for 220 Vdc: 0.15 A
dc
: 0.4 A
dc
: 2 A
b. for 125 V
c. for 48 V
4. Breaking capacity (L/R = 40 ms)
a. for 125 Vdc: 0.25 A
b. for 48 V
: 0.5 A
dc
1. Extended range:
High: operating range 86 up to 280 Vdc (inactive below 60 Vdc)
Low: operating range 18 up to 160 V
Consumption: <3 mA
They are single-directionals. In the interconnection diagrams
they are presented as follows:
Figure 2.12. Interconnection diagrams
And the corresponding polarity is:
Figure 2.13. Polarity
(inactive below 13 Vdc)
dc
2. Restricted range:
24 Vdc: Operating range 18 up to 34 Vdc (inactive below 15 Vdc)
: Operating range 36 up to 60 Vdc (inactive below 26 Vdc)
48 V
dc
: Operating range 85 up to 150 Vdc (inactive below 60 Vdc)
125 V
dc
: Operating range 65 up to 264 Vdc (inactive below 110 Vdc)
220 V
dc
Consumption: ≤3 mA
They are two-directionals (they do not have polarity)
IG-150-EN version 04; 03/10/16
41

Hardware General instructions
ekor.rps
2.8.4. IRIG-B input
Demodulated input, TTL level
Type of cable: 2 shielded twisted wires
Isolation: 500V
Connections:
IRIG-B generator
1
Screen
2
Twisted and shielded pair
3
ekor.rps unit
4
Figure 2.14. IRIG-B input
The input circuit is a 390 Ω serial resistance with an
optoacoplator; for a 5 V signal, the approximate consumption
is 10 mA.
The number of units that can be connected in parallel to
a generator depends on its capacity of supplying output
current; a typical value could be 70 mA, so 6 units could be
connected, (although the length and the type of wire can
also inuence). The wire must be shielded and twisted.
42
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
2.8.5. Analog outputs
Hardware
1. Range: 0 to 5 mA
2. Accuracy: ± 1 % full scale
3. Maximum charge: 1200 Ω
4. Insulation: 1 kV
2.8.6. Phase and neutral current circuits (standard rating 1 A)
1. Phases full scale: 40 A
2. Neutral full scale: 20 A
3. Thermal capacity:
a. Continuous: 20 A
b. Short duration: 500 A (1 s)
4. Consumption Ir=1A: <0.02VA
2.8.7. Sensitive neutral or isolated neutral current circuits (standard rating 0.025 A)
1. Full scale: 1 A
2. Thermal capacity:
a. Continuous: 3 A
b. Short duration: 60 A (1 s)
3. Consumption a Ir=0.025A: <0.015VA
2.8.8. Phase and neutral current circuits (specified rating 1/5 A)
1. Thermal capacity:
a. Continuous: 20 A
b. For 1 second: 500 A
c. For ½ cycle: 1,250 A
2. Consumption Ir=5A: <0.2VA
3. Consumption I
=1A: 0.02VA
r
2.8.9. Sensitive neutral or isolated neutral current circuits (specified rating 0.25/0.025 A)
1. Thermal capacity
a. Continuous: 20 A
b. For 1 second: 500A (1s)
2. Consumption Ir=0.025A: 0.015VA
2.8.10. Voltage circuits
1. Thermal capacity
a. Continuous: 2 U
b. For 1 second: 5 U
For 1 minute: 3.5 U
c. Consumption for 63.5 V: 0.015 VA
d. Consumption for 100 V: <0.03 VA
r
r
r
ekor.rps units preferably have standard
rating current circuits. As an option and
when conrmed by Ormazabal’s technical–
commercial department, specied rating
current circuits are available.
IG-150-EN version 04; 03/10/16
43

Hardware General instructions
ekor.rps
2.8.11. Measurements accuracy
1. Current
Measurement range: (0 a 1.2*Ir)
For I
For I
=1: Class 1 (1% of Ir)
r
=5: Class 0,5 (0,5%of Ir)
r
Protection Range: (0.1 to 200 A)
1 % of the real value for I> 1 A
3 % of the real value for I< 1 A
(In areas where the measurement range and the protection
range overlap, the accuracy is the best one out of both of them).
2.9. Operating frequency
Rated: 50 or 60Hz (programmable)
Operating range: F
± 5Hz
r
2.10. Phase order
ABC or CBA (programmable).
2. Voltage
Accuracy: 0.5 % of the rated voltage Ur up to 1.2*V
3. Phase dierence angles
Accuracy: ± 1°
4. Active power
Measurement range: (0to1.2*Ir*1.2*Vr)
For I
For I
= 1: Class 1 (1%ofPr)
r
=5: Class 0.5 (0.5%ofPr)
r
r
44
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
3. Unit configuration
Unit configuration
The settings that are dened next congure the unit, for
what they are basic.
Some are only accessible by keyboard/display; others they
are also accessible by console.
All of them are of single table (table 0). By keyboard/display
you access the programming of the table 0 through the
menu “change settings” by means of the keys↑↑↓↓.
3.1. Programming of digital inputs and logic inputs
In the unit there are two dierent types of inputs: The
digital inputs (physical, wired in the eld) or logical inputs
(internal). Each function of possible input (for example
“breaker state”) is only programmed as digital or logical, but
never as both at the same time.
The programming of digital inputs is as follows:
By console, it is carried out on the screen “digital inputs
conguration”, in the upper square of the two located on
the right.
By keyboard/display:
PROG. TABLE 0 - PROG.CONFIGUR – CONFIG. INPUTS
SELECT. N0/NC
INPUTS ACTIV.T
Cong inputs allows programming a digital input among
the following possibilities:
1. Breaker status.
2. Reference voltage (for the recloser).
3. External protection (79/50 BF). It causes reclosure
(depending on the enables) and activates the breaker
failure function (three-phase).
4. Close command. It activates the closure relay.
5. Open command. Activates the general trip.
6. Instantaneous inhibition. If it is active, the overcurrent
instantaneous does not trip, but they count the time
passed since their picking up. So, when de input is
deactivated and the additional programmed time is
elapsed, they trip instantaneously.
7. Set table 1. If a pulse is received, sets settings table 1 as
the active table.
8. Set table 2. If a pulse is received, sets settings table 2 as
the active table.
9. Set table 3. If a pulse is received, sets settings table 3 as
the active table.
10. Set table 4. If a pulse is received, sets settings table 4 as
the active table.
11. Set table 5. If a pulse is received, sets settings table 5 as
the active table.
12. Set table 6. If a pulse is received, sets settings table 6 as
the active table.
13. Set local command/remote.
14. Close circuit supervision 1 with 52 open.
15. Close circuit supervision 1 with 52 close.
16. Trip circuit supervision 1 with 52 open.
17. Trip circuit supervision 1 with 52 close.
18. Close circuit supervision 2 with 52 open.
19. Close circuit supervision 2 with 52 close.
20. Trip circuit supervision 2 with 52 open.
21. Trip circuit supervision 2 with 52 close.
22. Local reposition. It turns o the tripping LEDs and
23. df/dt breaker (level 1 to level 4). Option for 81 R function.
24. Teleprotection reception (for 85 function).
25. Guard signal loss (for 85 function).
26. Zone 3 address reverse (for 85 function).
27. 79/50BF. External protection A, B, C. They cause
28. Slack springs. For the corresponding automation.
29. Fuse failure. It activates the function with the same name.
30. Thermal image reposition. It resets the thermal image
31. 67 NS Isen (φ) or Icos (φ). It allows using any algorithm,
32. 67 NS Isen (φ) or Icos (φ). It allows using any algorithm,
33. Close locking, it locks all the close commands, recloser,
34. Relay locking; while it is active, it sets the relay out of
35. Recloser blocking. If it is active, the recloser is blocked
36. Not allocated. The input can be used by the protection
It should not be programmed more than an input with a
certain function.
deactivates the relays programmed as “memorized”; it
is equal to fault recognition for keyboard/display.
reclosure (depending on the enables) and they activate
the respective breaker failure functions (single-phase).
temperature.
regardless the setting in the neutral directional.
regardless the setting in the sensitive neutral directional.
push-button, command, and digital input.
service.
and it does not allow its unblocking by communications.
for lockout or logical, or not be used, anyway its state
can be transmitted to control.
IG-150-EN version 04; 03/10/16
45

Unit configuration General instructions
ekor.rps
Select. NO/NC. It denes if the input must be interpreted
like active when it is viewed closed or when it is viewed
open. If it is dened as NO, when the input is open the sign
is 0 and when it is closed 1 (for logic inputs). If it is dened
as NC, when the input is open the sign is 1 and when it is
closed 0 (for logic inputs).
For example, for the status of the circuit breaker, if we use a
contact 52 a we should program the corresponding input as
NO (when it closes it indicates closed circuit breaker), while
if we use a 52 b we should program it as NC (when it opens
it indicates closed circuit breaker).
T.activ.inputs (time of activation of inputs). It is a software
lter for the activation/deactivation of digital inputs. The
HW lters is of 1 ms, and it can be extended by Software
in the number of programmed milliseconds (range 0 to
20ms).
The programming of logical inputs is as follows:
By console, it is carried out on the screen “digital inputs
conguration”, in the lower square of the two located on
the right.
By keyboard/display:
PROG. TABLE 0 - PROG.CONFIG – CONFIG. INPUTS – LOGICAL
INPUTS SELECT. N0/NC
A logical input is a virtual (not physical), the state of which
depends on the state of the corresponding logical input
(input 1 corresponds to signal 1, input 15 to signal 15).
Its function is the one that has been programmed (the
programming possibilities are the same as for the digital
inputs).
This procedure allows the assignation of the relay internal
signals to those inputs as if they were wired eld signals. Up
to 15 logical inputs are permitted (there are only 15 logical
signals).
NO/NC selection, input active when the logic is active or
inactive.
Delay is not applied to the activation.
Example: If programming logical input 3 as “breaker status”
and NO, the unit will consider that the breaker will be closed
when logical input 3 is active.
A certain function must be only programmed as one
input. It is not possible, for example, programming “breaker
state” as digital input and as logical input.
3.2. Programming of digital outputs
By console it is carried out in the screen “Digital outputs
conguration”
By keyboard/display:
PROG. TABLE 0 - PROG.CONFIG – PROG. OUTPUTS
OUTPUT ACTIV. T
The functionality of each digital output can be programmed
like an OR of the logical signals available in this unit (see
point “List of available signals”, Appendix III).
In the programming through console (recommended), for
each digital output it is clicked with the mouse in the cells
corresponding to the signs whose OR wants to be activated
by the output (dot-matrix programming).
In the programming screen, at the beginning of the list of
available signals, a line appears with the title “OUTPUT TYPE”
which denes for each digital output if it is of the type “trip”,
“close” “memorized” or “nothing”. If it is of the type “trip” the
output carries out the sealing logic (if the sealing setting
is set to YES) and that of opening failure. If it is of the type
“close” the output carries out the sealing logic (if the sealing
setting is set to YES) and that of close failure. If the type is
“memorized”, once activated it is deactivated digital input
actuation programmed as “local reposition” command or
keyboard/display (“recognize fault”). If the type is “nothing”
it does not do anything special.
The time of activation of outputs denes the minimum
time of operation of each physical output once it has been
activated (in seconds). The range is 0.05 to 5 s. It appears in
the last line of the screen.
By keyboard/display is more complicated. In PROG.SALIDAS,
we nd for each one of them with “ASIGN SIGNALS”, with the
following possibilities.
No signal (the output remains without assigning, but it can
be activated by control commands).
Same signals (it is not wished to change the current
programming).
Other signals (it is wished to change the current
programming). When pushing“↵”(Intro), it is gone through
the logical signals with the arrow↓; when we arrive to a
signal that we want to use in the OR that denes the output
we press “R”; when we nish with the signals, we pulse “↵”,
which takes us to the programming of the output type, with
the possibilities already indicated.
46
IG-150-EN version 04; 03/10/16

General instructions
POWER SCALE =
“POWER BACKGROUND”
ekor.rps
3.3. Programming of LEDs
Unit configuration
Through console, it is carried out in the screen “LEDs
programming”.
By keyboard/display:
PROG. TABLE 0 - PROG.CONFIG–PROG. LEDs.
3.4. Programming of general settings
3.4.1. General description
Relay in service: it has to be at Yes in order to have the
protection fully operative. If it is at NO the protection
responds to the communications and the keyboard/
display in order to be put in service; besides it activates the
relay and/or LED programmed as “relay out of service”, by
deactivating all the rest.
Breaker number: it is an identifying text. It can be
programmed as alphanumerical by communications, but
by keyboard only as numerical.
Event mask: in the “events report” section a list is given
with the ones related to the protection. Most of them can
be masked, from the PC. They can not be masked from the
keyboard.
To register an event type the mask has to be set to “NO”.
Transformation ratios: used by the protection only to give
measurements referred to the primary.
Nominal voltage: it is the nominal single-phase voltage. It is
used by the protection to give measurements in PROCOME
format (the scale range of the voltage measurements is 1.2
times the nominal voltage).
Type of voltage: it indicates if the voltage signals connected
to the unit are “simple” (phase-earth) or “compound” (phasephase). In the case of units with closed terminals only the
single ones can be applied.
Voltage measurement: it indicates over which voltages
the voltage protections must be applied.
These settings are located in the console on the screen
“general settings and remote port conguration”, and in the
keyboard/display on “PROG.TABLE 0”–“GENERALS” (through
keyboard, the settings of voltage type and measurement
are both under the title “voltage input”).
The proceedings are totally analogous to the programming
of digital outputs, except that the activation time is not
programmed and that the possible types are “memorized”
and “non memorized”. The non memorized turns o
when the cause for turning on disappears; to turn o the
memorized a “fault acknowledgement” must be done either
by keyboard/display, digital input or command.
On the same console screen, and by keyboard/display on
FACTOR CORRECTION (at the same level as PROG.CHART 0)
can be found the following settings:
“Constant active energy (kWh)”: the number programmed
here is the impulse factor of active energy; this means the
kWh number for which the counter is increased in one unit.
“Constant reactive energy (kWARh)”: the number
programmed here is the impulse factor of reactive energy;
this means the kVARh number for which the counter is
increased in one unit.
“Power correction factor”: is a correction factor of the scale
range for measurements of active and reactive power given
to control (it does not aect to data given by display). It is,
in per unit values, the scale range in which measurements
are given related to the corresponding power to 1.2 I
r
and 1.2 Vr. It means that if the range required is “POWER
BACKGROUND”, the power correction factor is:
3 * 1.2 Ir * 1.2 V
Example 1. Ir=5A, Vr=63.5V (110/√3V)
If it is required that the power full scale should be the power
corresponding to 6 A (1.2 * 5 V) and 76.2 V (1.2 * 63.5)
Power full scale = 3 * 6 * 76.2
Power scale =1
Example 2.I
It is required a power full scale of 1000 W
Power full scale = 1,000
Power scale = 1,000/(3 * 1.2 *5 *1.2 * 63.5) = 0.729
=5 A, Vr=63.5V (110/√3V)
r
r
IG-150-EN version 04; 03/10/16
47

Unit configuration General instructions
ekor.rps
The following setting is only available via the keypad/
display in IRIG-B format (at the same level as PROG.TABLE 0):
“IRIG-B format”: determines if the year in the IRIG
synchronization is taken into account or not. The options
are: “B002” (which does note take the year into account) and
“B002 IEEE 1344” (which takes the year into account).
“Analog output”: the equipment has two analog outputs,
which provide one output in milliamperes proportional to
the measured value; they can be programmed (only with a
console) as follows:
1. I
2. V
, secondary current maximeter. Full scale 6 A.
maximum
, Vb, Vac, U average compound U, secondary compound
a
voltages. Full scale √3*Vr*1.2.
3. I
, Ia, Ib, Ic, I
n
, secondary currents. Full scale 6 A.
average
4. [P (active power)], secondary absolute value P. Full scale
3.4.2. Setting ranges (table 0, single)
Setting Min Max Step Notes
Relay in service
Breaker number
Events mask
Phase curr. turn. ratio
Neutral cur. turn. ratio
Sens. N. cur. turn ratio
Voltage turn. ratio
Simple rated voltage [V]
Type of voltage
Measurement of voltage
IRIG-B format
Analog output 1
Analog output 2
Active energy [kWh]
Reactive energy [kVARh]
Power correction factor
Table 3.4. Setting ranges
1 3,000 1
1 3,000 1
1 3,000 1
1 9,999 1
40.0 200.0 0.1
1 9,999 1
1 9,999 1
0.010 2,000 0.001
3*V
*1.2*6.
r
5. [Q (reactive power)], secondary absolute value Q. Full
scale 3*V
*1.2*6.
r
6. [S (apparent power)], secondary absolute value S. Full
scale 3*V
*1.2*6.
r
7. [Cos A], phase A power factor absolute value. Full scale 1.
8. [Cos B], phase B power factor absolute value. Full scale 1.
9. [Cos C], phase C power factor absolute value. Full scale 1.
10. [Average cos], average power factor absolute value. Full
scale1.
11. Fault distance, given in the feeder’s total length
percentage.
The operation of the analog output used for the fault
distance is explained in the “presentation of results” section
in the “fault locator” chapter.
YES/NO
5 alphanumeric char.
See “Events”
Simple/compound
Phases in which it is measured
B002 (without year)/B002 IEEE 1344 (with year)
See “Analog output”
See “Analog output”
48
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
3.5. Communication configuration
3.5.1. Communication via front door (Port 1_1) and rear port Nr. 2 (Port 1_2) (COM 1)
Unit configuration
The ekor.rps unit has an address identifying number, which
makes possible to identify the messages sent to the unit,
from the PC, via its front port (or via its rear port in parallel),
with protocol PROCOME. This address is programmable
from the keyboard/display, entering “CHANGE SETTINGS”,
“PROG. TABLE 0”, “CONFIG.COMMUNIC.”, “FRONT PORT ”, “UCL
ADDRESS”.
The units leave the factory with the address 1. This number
is the one used in the engineering program when dening
the installation.
If, for any reason, this number is changed in engineering, the
address programming has to be changed, and vice versa.
3.5.2. Communication via rear port Nr. 1 (Port 2) (COM 2)
The protocol type to be used by this port is dened in
“CHANGE SETTINGS”, “PROG. TABLE 0”, “CONFIG. COMMUNIC
"SELEC. COMMU. COM 2". The options are: PROCOME, DNP,
MODBUS, IEC 870-5-101 or IEC 870-5-103.
PROCOME
If the option chosen is PROCOME, in “CHANGE SETTINGS”,
“PROG. TABLE 0”, “CONFIG. COMMUNIC.”, “PORT COM2”, a
setting group is programmed which is analogous to the one
dening the front port (it is not necessary that they have
the same values), but there also exists the setting “CONTROL
SIGNALS”, with the options “none” and “RTS.
If the ekor.rps unit is replaced by another one, the installed
unit must have the same address as the removed one.
They are also programmable in the unit within the “CONFIG.
COMUNICAC.”: The baud rate, the parity and the number of
stop bits. The units leave the factory at 19 200 baud, even
parity, 1 bit of Stop.
The established communications settings can be seen on
display, entering “SEE SETINGS”, “SEE TABLE 0”, “CONFIG.
COMMUNIC.», “PORT COM 1”
115 200 baud rate or higher, they are only used for Firmware
teleload, and not to be used in normal operation.
If a replacement of the ekor.rps unit by other is made,
the installed unit must have the same address as the one
removed.
The unit also has an identication number of the Master unit
to which is connected, and which only accepts messages
coming from there. It is also programmable in the unit
within the “CONFIG. DNP”. The units leave the factory with
the address 0. The baud rate, the parity and the number
of STOP bits are also programmable. The units leave the
factory at 9600 baud, without parity, 1 STOP bit.
The established communication settings can be seen on
the display, entering “SEE SETTINGS”, “SEE TABLE 0”, CONFIG.
COMMUNICAT.”, “PORT COM 2”, “CONFIG. DNP”.
DNP
If the option chosen is DNP, the address is programmable
from the keyboard/display, entering “CHANGE SETTINGS”,
“PROG. TABLE 0”, “PORT COM 2”, “CONFIG. DNP”, “LCU
ADDRESS”. This address does not need to be the same
as the one of the front port, but it is convenient to avoid
confusions. The units leave the factory with the address and
the rest of DNP parameters without being programmed.
They have to be programmed by the user.
IG-150-EN version 04; 03/10/16
Apart from the keyboard/display, the settings can also be
displayed/programmed from the PC with the protection
console.
For more detail on communication DNP, see the
corresponding appendix.
49

Unit configuration General instructions
ekor.rps
MODBUS
If the chosen option is MODBUS, the address is programmable
from the keyboard/display, entering “CHANGE SETTINGS”,
“PROG. TABLE 0”, “CONFIG. COMMUNICAC.”, “PORT COM 2”,
"CONFIG. MODBUS", “UCL ADDRESS". This address does not
need to be the same as the one of the front port, but it is
convenient to avoid confusions. The units leave the factory
with the address and the rest of the MODBUS parameters
without been programmed. They have to be programmed
by the user.
If the ekor.rps unit is replaced by another one, the installed
unit must have the same address as the one removed.
They are also programmable the baud rate, the parity and
the auxiliary timers for activation and deactivation of the RT
signal (internal).
The established communication settings can be seen on
display, entering “SEE SETTINGS”, “SEE TABLE 0”, “CONFIG.
COMMUNICAT.”, “PORT COM 2”, "CONFIGUR. MODBUS".
Apart from the keyboard/display, the settings can also be
displayed/programmed from the PC with the protection
console.
For more detail on MODBUS, see the corresponding
appendix.
If the ekor.rps unit is replaced by another one, the installed
unit must have the same address as the one removed.
They are also programmable the baud rate, the parity and
the auxiliary timers for activation and deactivation of the RT
signal (internal).
The established communication settings can be seen on
display, entering “SEE SETTINGS”, “SEE TABLE 0”, “CONFIG.
COMMUNICAT.”, “PORT COM 2”, "GENERAL"
Apart from the keyboard/display, the settings can also be
displayed/programmed from the PC.
For more detail on 101 communication, see the corresponding
appendix.
This protocol can not be used with RS485 port.
IEC 870-5-103
[2]
If the chosen option is 103, the address is programmable
from the keyboard/display, entering “CHANGE SETTINGS”,
“PROG. TABLE 0”, “CONFIG. COMMUNICAT.”, “PORT COM 2”,
“LCU ADDRESS”. This address does not need to be the same
as the one of the front port, but it is convenient to avoid
confusions. The units leave the factory with the address and
the rest of the 103 parameters without been programmed.
They have to be programmed by the user.
IEC 870-5-101
If the chosen option is 101, the address is programmable
from the keyboard/display, entering “CHANGE SETTINGS”,
“PROG. TABLE 0”, “CONFIG. COMMUNICAT.”, “PORT COM
2”, "GENERAL”, “LINK ADDRESS” and “APPLICAT ADDRESS”.
This address does not need to be the same as the one of
the front port, but it is convenient to avoid confusions. The
units leave the factory with the address and the rest of the
101 parameters without been programmed. They have to
be programmed by the user.
If the ekor.rps unit is replaced by another one, the installed
unit must have the same address as the one removed.
They are also programmable the baud rate, the parity and
the auxiliary timers for activation and deactivation of the RT
signal (internal).
The established communication settings can be seen on
display, entering “SEE SETTINGS”, “SEE TABLE 0”, “CONFIG.
COMMUNICAT.”, “PORT COM 2”.
Apart from the keyboard/display, the settings can also be
displayed/programmed from the PC.
50
[2]
For more detail on 103 communication, see the corresponding
Volume 2 of 2.
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
3.5.3. Ethernet communication
Unit configuration
It is only used in models with an Ethernet port.
To congure the Ethernet port, the rst parameter to
be congured is the one corresponding to the TCP/IP
communication selection. It is congured from the
keypad/display, in “CHANGE SETTINGS”, “PROG.TABLE 0”,
“COMMUNICATIONS”, “SELECT COM TCP/IP”. The parameter
options are: PROCOME, com. Horizontal and No. The operation
is as follows:
1. PROCOME: The Ethernet port communicates with the
PROCOME protocol. In this case, the PROCOME protocol
cannot be selected from the other rear port (“COM 2”).
In summary, the Ethernet port communicates with the
PROCOME protocole, whereas the second rear port (if
available) communicates with the protocol selected,
except with PROCOME.
2. Horizontal communication: The Ethernet port
allows communication between several protection
relays, according to their conguration. Each relay can
communicate with another two relays by sending 8
dierent programmable signals to each one of them.
These programmable signals can be selected out of any
equipment’s signals and receive 8 signals from each of
the relays used for the communication programming.
The relay takes the signals as its own. These signals
are “signal i relay 1 or 2” where i goes from 1 to 8. The
necessary parameters to congure the horizontal
communication are the following (they can only
be accessed with a console, in the “Communication
between relays” screen, within “General”):
a. Protection IP address. Indicates the protection IP address
(server equipment). It is 32 bits, in decimal numbers
separated by dots.
b. Relay 1 IP address (identifier). Indicates the IP address of
protection 1 it wants to communicate with. It is 32 bits,
in decimal numbers separated by dots. If the IP address is
programmed as 0.0.0.0, there is no communication with
relay 1.
c. Signals to transmit relay 1. They are the signals to be
sent to relay 1 (the one with the protection IP address
programmed in the previous parameter).
d. Relay 2 IP address (identifier). Indicates the IP address of
protection 2 it wants to communicate with. It is 32 bits,
in decimal numbers separated by dots. If the IP address is
programmed as 0.0.0.0, there is no communication with
relay 2.
e. Signals to transmit relay 2. They are the signals to be
sent to relay 2 (the one with the protection IP address
programmed in the previous parameter).
The operation is as follows: Each relay communicates with
the other two, sending the status of the programmed
signals every 10 ms; if a change in the programmed signals
is detected, it sends the status every 10 ms. If during 40 ms;
no communication is received from relay 1 or 2 an error
signal is generated with the corresponding relay.
The signals received from relay 1 and relay 2 arrive at
the control signals “Signal i relay 1” and “Signal i relay 2”,
where i goes from 1 to 8. These signals can be treated as
the equipment’s own signals, which means that logics can
be made with them, they can be sent to the outputs, etc.
3. NO. It does not communicate with the Ethernet
port. In this case, the second rear port (if available)
communicates with the selected protocol, allowing
PROCOME.
The other Ethernet port conguration parameters are
congured with the Sipcon console, in the “TCP/IP
conguration” menu. These parameters are:
General
Protection IP address. Indicates the protection IP address
(server equipment). It is 32 bits, in decimal numbers
separated by dots.
Subnetwork Mask. Determines the part of the IP address
which identies the network. It is 32 bits, in decimal
numbers separated by dots. Any IP addresses not meeting
the subnetwork mask, this is with a subnetwork mask part
dierent than “1”, are not considered part of the network
and are not handled. For instance, the mask 255 255 255 000
allows 256 server addresses sharing the rst 3 address
values.
Gateway. Indicates the IP address of the servers, which are
not part of the local network, where the messages are sent.
It is the IP address of the equipment that performs the
network router functions.
Nr. connections. Set to 1.
PROCOME
Master IP address. Indicates the PC address (client equipment).
Port. Indicates the port the master equipment connects to.
UCL address. It is the protection address to which the
protocol responds.
IG-150-EN version 04; 03/10/16
51

Unit configuration General instructions
ekor.rps
3.6. Other configuration settings
Only accessible by keyboard/display, on “CHANGE
SETTINGS”, “PROG. TABLE 0”, “DEFINE PROTECT.”. They are the
following:
3.6.1. Frequency
It can be 50 Hz or 60 Hz. It is a fundamental protection
setting. If it is not the correct one, the measurements and,
therefore, the protection operation will be wrong.
3.6.2. Language
It can be English or Spanish. It relates to the texts shown
ondisplay.
3.6.3. Phase order
It can be A, B, C or C, B, A. It aects only to the protection
functions of broken conductor and unbalance (currents and
voltages). To verify that the order corresponds to the wiring,
3.6.4. Neutral Parameter
If it is “by transformer” indicates that an input transformer
exists to measure the zero sequence voltage; if it is “measured”
3.6.5. Calibration
This menu position is exclusively to be used by the
Ormazabal's technical-commercial department, according
to a certain procedure. It should not be used by the user.
3.6.6. Test mode
The test mode is to be used by Ormazabal’s technical–
commercial department exclusively, following a specic
procedure. It must not be used by the user.
check in “measurements” that the ratio of the inverse/direct
component is close to 0 %, when introducing 3 balanced
currents of about 1 A.
indicates that it must be calculated as a vectorial sum of the
simple phase to ground voltages.
52
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
3.6.7. Push-buttons/LEDs enabling and locking by command
Unit configuration
Under the title “PUSH-BUTTONS” there are two settings:
“ENAB. PUSH-BUTTON” (enable push-buttons): If this setting
is at “COMMAND”, the front plate command push-buttons
are enabled; if it is set at “NO”, it is as if they did not exist.
If it is at “FUNCTIONALS” both the command push-buttons
and the keys can be used to order commands. These pushbuttons are only eective when the equipment is in local
mode. The equipment starts in remote. To change to local
mode, press “L/R” and “.” if it is in COMMAND and “L/R” if it is
in FUNCTIONALS. The order “local mode” or “remote mode”
must be programmed in the command associated to that
push-button (“Command conguration” screen), in the ON
and OFF positions. The equipment changes then to local
mode and the functional push-buttons are enabled.
3.6.8. Power supply supervision enabling
The power supply supervision can be enabled or not. For its
operation, see section “Power supply supervision”.
3.6.9. Power supply enabling
“ENAB.COMMAND LOC” (Enable blocking/unblocking by
command): If this setting is at “YES”, the programmed
protection function blocking/unblocking control commands
are enabled; if it is set at “NO”, they are disabled.
“R KEY BLOCKING”. If it is set to “YES”, the Leds are not
handled in the program, they are all deactivated except for
Led 8, which turns green.
There is a setting under “PRESS REMOTE” which allows to
execute commands via push-buttons if it is set to “YES”,
even in “remote” mode. If it is set to “NO”, it must be in “Local”
mode to execute the commands.
Only in those models with the option “battery voltage
measurement”. The power supply supervision can be
3.6.10. Display contrast setting
The procedure to follow is the following one:
1. By pushing key “
” (in a 16-key keyboard) for 3 to 5
seconds, you can enter the contrast setting menu and
there will appear the text “contrast setting. - DOWN +
U P”.
enabled or not. See “Power supply supervision” section for
its operation.
2. With keys “
↑ and ↓“ the contrast is set. With “↑“ more
bright is given and with “↓ “ it is darkened.
In order to validate, push “ESC” or after 1 minute it goes back
to its normal situation, with the changes already carried out.
IG-150-EN version 04; 03/10/16
53

Protection functions. Description and settings General instructions
ekor.rps
4. Protection functions. Description and settings
4.1. Phase overcurrent protection
4.1.1. General description
Three-phase overcurrent protection, with the next selectable
characteristics (function 5051):
Timed characteristic
1. Inverse normal time( I BSC
[3]
or I ANSI))
2. Inverse short time(IC BSC)
3. Inverse long time (IL BSC)
4. Very inverse time (MI BSC or MI ANSI)
Instantaneous characteristic
1. Two instantaneous elements
2. Additional time
The operation of this protection is coordinated with the
reclosing function.
5. Extremely inverse time (EI BSC or EI ANSI)
6. Very inverse special time (MIEs BSC)
7. Moderately inverse time (ANSI)
Some protection families have a second directional
overcurrent function (67, 67N), called HIGH2, which is
independent from the rst one.
8. User curve(USER 1 or USER 2)
9. Denite time
10. Drop out with disc emulation option
4.1.2. Settings ranges of the timed characteristic (6 tables) (normal and HIGH2)
Setting Min Max Step Notes
Enable
Pickup [A]
Curve type
Time index
Denite time [s]
These settings can be found in the console on the screen “overcurrent protection (1)”. PHASES TIME SETTING box.
0.02 40.00 0.01 With standard ratings
0.1 200.0 0.01 With specied ratings
0.05
0.5
0.0 600.0 0.01
1.09
30.0
0.01
0.1
YES/NO/pickup/YES+drop out
Denite time
Normal curve, very inverse, extrem. inverse, etc.
User curve
For IEC curves
For ANSI curves
Table 4.1. Settings ranges of the timed characteristic
They can be modied depending on the voltage, if the unit
contains the option 51 V (see “voltage control”).
If the enable setting is set at YES, the function can generate
trips, if it is at NO it is not carried out. If it is at PICK UP, it picks
up but it doesn’t give tripping signal. If it is at YES+DROP, This
happens by emuling the disc (see below). This is general for
overcurrent functions.
[3]
Equivalent to IEC 255-4
54
The pick up current is set in amperes in the secondary.
Working in denite time, the relay trips after the set time,
since the starting current has been exceeded, is elapsed,
independently from the current value.
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Protection functions. Description and settings
Working with curve, the time to trip depends on the
selected curve (family and index) and the current value.
The curves which are normal, very inverse and extremely
inverse, or user curves can be selected as corresponding
to the standard BS142 (IEC 255-4) or ANSI. In appendix II
graphics and formulas for calculating the time are given, as
a function of the ratio between the current and the pickup
current. If the ratio is higher than 40, 40 will be taken for
calculating.
It is also possible to program 4 user curves.
The unit allows setting the drop time characteristics,
emulating the induction disc of the electromechanical
relays and allowing a better coordination of the protection.
If the enabling is set at "YES+REDROP" and the current
decreases below the 95 % of the set value, the trip drops
instantaneously and the pickup drop time will depend on
4.1.3. Timing cancellation
Through the console screen “timing cancellation” or
through keyboard/display (in the CURRENT PROT., in
TIMING CANCELATION) a digital or logical input can be
the selected curve (family and index) and o the current.
If the selected curve is denite time, the pickup will drop
when the programmed time since it decreases below the
pick up current elapses, regardless the current value. (See
“curves for timed characteristic” in appendix II).
If the enabling is set at "YES" and the current decreases
below the 95 % of the set value, the trip and the pick up
drop instantaneously.
The maximum error in times, for values higher than 50 ms,
is 30 ms or 5 % of the theoretical value (the higher of the
two). For the denite time setting of 0 ms, the behavior is
the same as for the instantaneous characteristic (see next
paragraph).
If an unacceptable index value is programmed
for a type of curve, the unit takes the closest
acceptable value.
programmed for every overcurrent timed , so that if the
function is activated it is not timed any more and behaves
as instantaneous.
4.1.4. Settings ranges of the instantaneous characteristic (low level) (6 tables) (normal and HIGH2)
Setting Min Max Step Notes
Enable
Phase instantaneous trip [A]
Additional time [s]
Special function
These settings can be found in the console on the screen “overcurrent protection (1)”. INSTANT PHASES box
Table 4.2. Settings ranges of the instantaneous characteristic
The trip current is set in secondary amperes.
0.02 40.00 0.01 With standard ratings
0.1 200.0 0.01 With specied ratings
0.00 60.00 0.01
tripping currents, on 30 to 35 ms. If an additional time is
YES/NO/pick up
See “Instantaneous special operation”
programmed, this is added to the indicated time.
If additional time 0 is programmed, for current values
between the tripping current and 1.5 times that value,
it trips between 40 and 50 ms; for 2 times the tripping
current between 35 and 40 ms, and from 3 times the
With additional times higher than 50 ms the maximum time
error is 30 ms or 5 % of the theoretical value (the higher of
the two).
IG-150-EN version 04; 03/10/16
55

Protection functions. Description and settings General instructions
ekor.rps
4.1.5. Settings ranges of the instantaneous characteristic (high level) (6 tables)
Setting Min Max Step Notes
Enable
Phase instantaneous trip [A]
Additional time [s]
These settings can be found in the console on the screen “instantaneous overcurrent prot. (HIGH1)”. INSTANT PHASES box (HIGH).
Table 4.3. Settings ranges of the instantaneous characteristic
0.02 40.00 0.01 With standard ratings
0.1 200.0 0.01 With specied ratings
0.00 60.00 0.01
YES/NO/pick up
The characteristics of the times are the same as in the
previous paragraph.
4.2. Neutral overcurrent protection
4.2.1. General description
In neutral earthed installations, the neutral overcurrent
protection has the same possible characteristics as the
described for phase overcurrent, and independent settings
(function 50N/51N).
4.2.2. Setting ranges of the timed characteristic (6 tables) (normal and HIGH2)
Setting Min Max Step Notes
Enable
Pick up [A]
Curve type
Time index
Denite time [s]
These settings can be found in the console on the screen “overcurrent protection(1)”. NEUTRAL TIME SETTING box.
Table 4.4. Setting ranges of the timed characteristic
0.010 20,000 0.001 With standard ratings
0.1 200.0 0.01 With specied ratings
0.05
0.5
0.0 600.0 0.01
1.09
30.0
0.01
0.1
YES/NO/pick up/YES+drop
Denite time
Normal curve, very inverse, extrem. inverse, etc.
User curve
For IEC curves
For ANSI curves
The remarks about curves and accuracy are the same as the
ones quoted for phases.
56
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
4.2.3. Setting range of neutral time inhibition (6 tables)
Setting Min Max Step Notes
Limit current [A]
Table 4.5. Setting range of neutral time inhibition
0.1 200.0 0.1
Protection functions. Description and settings
The neutral time inhibition setting allows the inhibition
of this characteristic from the moment the neutral
that is, the curve turns into a horizontal line from this value.
If you do no want to use it, program the maximum value.
instantaneous characteristic picks up onwards.
This setting is in the “TOC limitations” screen, under the title
The limit current is the one after which it stops following the
“neutral TOC limitations”.
curve and it trips in the time the curve gives for this value,
4.2.4. Settings ranges of the instantaneous characteristic (low level) (6 tables) (normal and HIGH2)
Setting Min Max Step Notes
Enable
Neutral instantaneous time [A]
Instantaneous additional time [s]
Special operation
Type of neutral (only in HIGH2)
These settings can be found in the console on the screen “overcurrent protection (1)”. INSTANT NEUTRAL box.
Table 4.6. Settings ranges of the instantaneous characteristic
0.010 20.000 0.001 With standard ratings
0.1 200.0 0.01 With specied ratings
0.00 60.00 0.01
YES/NO/pick up
See “instant. special operation”
Transformer/calculated
The trip current is set in secondary amperes.
The remarks about functioning time are the same as the
ones quoted for phases.
4.2.5. Settings ranges of the instantaneous characteristic (high level) (6 tables) (normal and HIGH2)
Setting Min Max Step Notes
Enable
Neutral instantaneous trip [A]
Additional time [s]
These settings can be found in the console on the screen “instantaneous overcurrent protection. (HIGH1)”. INSTANT NEUTRAL box (HIGH).
Table 4.7. Settings ranges of the instantaneous characteristic
0.010 20,000 0.001 With standard ratings
0.1 200.0 0.01 With specied ratings
0.00 60.00 0.01
YES/NO/pick up
The characteristics of times are the same as the ones
indicated for phases.
IG-150-EN version 04; 03/10/16
57

Protection functions. Description and settings General instructions
ekor.rps
4.3. Instantaneous special operation
The settings corresponding to the phase, neutral and
sensitive neutral instantaneous (only in the low level), are
extended with the settings below:
Special operation: Options:
NO
Enab. after closing (enable ONLY after closing)
Tim. after closing (timing after closing)
Tim. after reclosing 1 (timing after reclosing 1)
Special xed time. It is the instantaneous operation time,
during the special operation.
Special operation time. It is the time during which the
special operation is maintained.
In the trip permission screen there are
independent masks for every instantaneous
level.
The operation described below implies
the setting “enable” be at YES and that the
recloser is “in service” (although it can be
blocked).
It is enabled at “NO”; the instantaneous is disable under any
condition.
If the recloser is out of service, the masks do not have any
eect.
Operation (with setting of the function enable at YES):
Option “NO”. Everything operates as now.
“Enable only after closing” option.
After any closing (manual or automatic), if the corresponding
mask in the trip permission screen is at YES, during “Special
operation time”, the instantaneous operates with the
additional time “Special xed time”; outside the special
operation time the instantaneous is disabled.
The “Special operation time” is initiated in each closing.
If the corresponding mask is at NO, the instantaneous is
disabled.
Figure 4.1. Instantaneous special operation
58
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Figure 4.2. Option timing after closing
Protection functions. Description and settings
Option “Timing after closing”. After any closing (manual or
automatic), if the corresponding mask in the trip permission
screen is at YES, during “Special Operation Time”, the
instantaneous operates with the additional time “special
Figure 4.3. Option timing after reclosing
xed time” instead of using the normal “additional time. This
time can be 0, in order to act as a true instantaneous.
If the corresponding mask is at NO, the instantaneous is
disabled.
Option “Timing after reclosing 1”. After the rst reclosing, if
the corresponding in the trip permission screen is at YES,
during “special operation time”, the instantaneous operates
with the additional time “Special Fixed Time” instead of
using the normal “additional time.
IG-150-EN version 04; 03/10/16
If the corresponding mask is at “NO”, the instantaneous is
disabled.
In other closings, dierent to the rst reclosing, the unit
operates as it does now, that is, it depends on the masks
and when it is enabled, it is with the normal additional time.
59

Protection functions. Description and settings General instructions
ekor.rps
4.4. 2nd harmonic restraint
It locks the rst level of the units 51, 50, 51N, 50N and 46
(time and instantaneous unbalance). For 50/51 units,
In order to deactivate the locking, the following conditions
must be fullled:
restraint is available for a single phase or for all phases.
1. This phase is below the 95 % of the minimum current.
If it is programmed as restraint of the phase itself:
In order to activate the locking, the following must be given
at least in this phase and simultaneously:
1. The fundamental current must be higher than the
minimum value for inrush.
2. The ratio between the 2
nd
harmonic value and the
fundamental one must exceed the threshold set.
3. The 2
nd
harmonic must be higher than 10 mA with
standard ratings, or higher than 50 mA with specied
2. This phase is below the 95 % of the restraint percentage
threshold.
In this case it is the same for neutral.
If it is programmed as “restraint for all phases” it is enough
with the conditions of one phase in order to lock the rest.
If the conditions are given in one phase or in neutral, it is
enough to lock the unbalance functions.
The settings (6 tables) are those below:
ratings.
Setting Min Max Step Notes
2nd harmonic restraint enable
Neutral enable
2nd harmonic threshold [%]
Phase minimum threshold [A]
Neutral minimum threshold [A]
The settings are located in the console in the “2nd harmonic restraint” and “manual closing protection blocking” screens.
5 100 1
0.1 200 0.01
0.1 200 0.01
NO
Restraint for phase
Restraint for all phases
NO
YES
Table 4.8. Settings
4.5. Protection functions blocking with manual closing
This function is only available in the EH3211
model.
A “BLOQ. FUN. PROT. CM” signal is generated, which allows
to block any unit by means of logics.
This function is only active when the equipment is in manual
mode. The equipment is considered to be in manual mode
when the recloser is blocked by command, input, R key or
by setting. If the equipment is not provided with a recloser,
this function is always active.
This function is an OR of a function that controls the module
and another one that controls the argument of the positive
and negative sequences.
The conditions to activate the blocking signal are as follows:
1. I
>k*I1, where k can be set
2
2. Ang (I
be set
Each condition has its own activation. If they are both
enabled the output is an OR of both of them. If the reverse
and direct sequences are less than 0.15 A the function’s
output is zero and in this situation it is not possible to block
any functions.
)– Ang (I1)> Adj. Angle, where Adj. Angle can
2
60
IG-150-EN version 04; 03/10/16

General instructions
Protection functions. Description and settings
ekor.rps
The settings (6 tables) are:
Setting Min Max Step Notes
Module enable
K module constant
Angle enable
Angle
The settings are located in the console in the “2nd harmonic restraint” and “manual closing protection blocking” screens.
Table 4.9. Settings
0 10 0.01
0 359 1
NO
YES
NO
YES
4.6. Directionality of the phase and neutral overcurrent protections
Depending on model, the described protection functions
can be directional.
In that case, each of the functions (timed, low instantaneous,
high instantaneous) has an additional setting, “torque
control”, if it is FOWARD or REVERSE, it indicates that
the function must act as directional (in one direction
or in the other one) and if it is set as NO it must act as
NONDIRECTIONAL.
For the neutral directional there are 4 directional types: The
angular, the watimetric, the I*cos(j) and the I*sen(j).
Watimetric directional and the cosen type directional are
practically equal, with the only exception that one is set to
W and the other one to A.
Even when the torque control set at YES
(FOWARD or REVERSE), the directionality
can be blocked (make it operate as nondirectional) by PROCOME command or
by digital or logic input (if it has been
programmed in the “Locking (I)” screen in
the “directional” position.
The settings corresponding to the directionality criteria
are on the screen “overcurrent protection screen (3)”. The
possibilities are related next and afterwards the functions
operation is described.
Phase direction criteria. It is applied in the phase directional
function (67). Next are the possibilities: “Quadrature” and
“sequences”.
Phase angle (degrees). Programmable from 0 to 360°. It is
applied in the phase directional function (67) and in the
neutral directional function (67N) in case the S- neutral
direction criterion has been chosen.
Neutral polarization. This setting is only for models that have
the possibility to polarize the neutral direction by current.
In this case, the possibilities are V (polarization by voltage
only), I (polarization by current only) or V+I (polarization by
both parameters).
Neutral directional type. It can be programmed as “angular
criteria”, “Icos phi”, “Isen phi” or “watimetric”.
Neutral direction criteria. It is applied in the neutral directional
function when it is polarized by voltage. The possibilities
are: S
(zero voltage polarization), S- (polarization by
0
negative voltage sequence), or S0 + S- (polarization by both
parameters).
If several polarization criteria combinations are used, the
fault will be decided to be forwards if some of the criteria
show it is forwards.
Neutral angle (degrees). Programmable from 0 to 360°. It is
applied in the neutral directional function (67N) in case the
S
neutral direction criterion has been chosen.
0
Minimum active power. It is used for watimetric directional.
Setting range from 0 to 2000 W in steps of 1 W.
P=Vr*Ir*cos(j-jc) j=Ánguloentre VreIr.
If the power is higher than this value in negative it is
considered to be forward fault. If it is higher than this value
in positive value it is backwards fault.
Minimum current. It is used for I*cos(j) and I*sen(j) directional.
Setting range from 0.1 to 200 A in steps of 0.01 A.
I
=Ir*cos(j-jc) j=angle between VrandIr.
minimum
If the I minimum is higher than this value in negative it is
considered to be forward fault. If it is higher than this value
in positive value it is backwards fault.
Polarization voltage. It is the minimum value of the
polarization voltage, below which it is considered that the
direction is not known with certainty.
V
minimum threshold. In order to allow the pick up of the
r
neutral directional unit, a Vr minimum threshold must be
exceeded.
IG-150-EN version 04; 03/10/16
61

Protection functions. Description and settings General instructions
ekor.rps
Trip permission without V
(Directional Locking on the
pol
display). If it is set as YES allows the overcurrent trip if the
polarization voltage is lower than the minimum polarization
voltage; if it is set as NO in those conditions the overcurrent
trip is not allowed.
Phase zone width and neutral zone width. They are settings
that show the angle that the trip zone of the phase and
neutral units will respectively cover. That is, if the maximum
torque line is set to 0° and the pick up zone width is set to
70° the relay will trip between + 35° y - 35°. This zone has
4.6.1. Phase directional in quadrature (67)
Operation
For the phase directionality detection, the polarization
voltage is the one corresponding to the connection in
quadrature (90°), where each phase current is compared
with the compound voltage between the other two phases.
It works as three single-phase units in which the polarization
voltages are the voltages composed by the healthy phases.
These voltages are obtained through calculation or through
transformer measurement depending if the setting voltage
type shows that the introduced signals are simple voltages
(calculation) or compound (measurement).
In case the phase order ABC is polarized with V
, Vbc and Vca
ab
against Ic, Ia, and Ib. In case the phases order CBA is polarized
with Vba, Vcb and Vac against Ic, Ia and Ib.
There is a 5
th
zone between the locking zone and the trip
zone, for which the present directional status is maintained.
VA
5°
1
VC
LMP
I
a
2
3
V
bc
4
VC
5°
to be added 5° at each side to obtain the locking zone. In
this zone the relay maintains the last state in which it was
(front or back). That is, if it comes from a trip zone, this trip
is maintained until the locking zone is crossed. If it comes
from a non-trip zone it is maintained without tripping until
crossing that zone.
If, for example, is wished that the tripping zone be between
- 45° y + 135°, the “setting angle” must be set in 45° and the
“covered angle” in 180°.
Memory
It is polarized by the positive sequence voltage while it is
higher than a threshold. If the voltage is lower than this
value it is polarized by means of the voltage memorized
2cycles before disappearing the voltage. This memorization
is maintained 0.5 s.
Trip permission without V
(directional locking on the
pol
display)
This setting is used when the polarization voltage falls
below a threshold (polarization V setting), so that if it is set
as YES, it indicates forwards (trip permission) and if it is set
as NO, it indicates reverse (no permission).
The memory treatment has been previously done.
Signaling
It provides forward and reverse signaling per phase.
Being the trip Permission without V
(Directional Locking)
pol
set as NO if the polarization magnitudes are below the
threshold, the direction is not signaled.
Being the trip Permission without V
(Directional Locking)
pol
set as YES if the polarization magnitudes are below the
threshold, it signals reverse and forward.
Locking zone
1
Trip zone
2
90 - Setting angle
3
Angle covered by trip zone
4
Figure 4.4. Phase directional
62
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
4.6.2. Phase directional by sequences (67)
Operation
Protection functions. Description and settings
Negative sequence directional
The direction is determined comparing the negative
sequence voltage and current, being I
higher than a
2
threshold and V2 higher than a threshold.
90 - setting angle < arg (I2) – arg 92 (V2) < 270 - setting angle
1
3
2
Trip zone
1
Locking zone
2
Setting angle
3
Figure 4.5. Negative sequence directional
Negative sequence Directional Locking
1. If the negative sequence voltage is lower than a
threshold (Polarization V setting) the positive sequence
directional is carried out.
2. If the negative sequence current is lower than a
threshold (0.068 A) the previous selection is maintained.
Positive sequence directional
The direction is determined comparing the positive
sequence voltage and current.
There is a 5
th
zone between the locking zone and the trip zone,
for which the present directional status is maintained.
90 - setting angle > arg I1) – arg (V1) > 270 - setting angle
1
Locking zone
1
Tripping zone
2
Angle covered by the tripping zone
3
Setting angle
4
Figure 4.6. Positive sequence directional
3
4
2
IG-150-EN version 04; 03/10/16
63

Protection functions. Description and settings General instructions
ekor.rps
Memory
It is polarized by the positive sequence voltage while it is
higher than a threshold. If the voltage is lower than this
value, it is polarized by means of the voltage memorized
2cycles before the voltage disappears. This memorization
is maintained 0.5 s.
Trip permission without V
(Directional Locking on the
pol
display)
This setting is used when the polarization voltage (V
) falls
1
below a threshold (setting), so that if it is set as “YES”, it
indicates forwards and if it is set as “NO”, it indicates reverse.
The memory treatment has been previously done.
4.6.3. Neutral directional (67N); polarization by S0(V0)
Operation with polarization by V0, zero sequence voltage
The direction is determined using the neutral current (3 I
)
0
with the neutral voltage as polarization, (3 V0). The angle
determines the range in which the fault is considered
forwards and reverse. The fault is considered forwards if:
Signalling
It provides forward and reverse signaling. If the direction
is forwards, the signals “Forward A”, “Forward B” and
“Forward C” get activated. If the direction is reverse, the
signals “Reverse A”, “Reverse B” and “Reverse C” get activated.
Being the trip permission without V
(Directional Locking)
pol
set as “NO”, if the polarization magnitudes are below the
threshold, the direction is not signaled.
Being the trip permission without V
(Directional Locking)
pol
set as “YES”, if the polarization magnitudes are below the
threshold, it signals reverse and forward.
90-setting angle < arg (I0) – arg (V0) < 270-setting angle
1
There is a 5
th
zone between the locking zone and the trip
zone, for which the present directional status is maintained.
The measurement of 3 V
can be obtained through a
0
transformer or calculated using the phase simple voltages.
If the “type of voltage” setting is set as “compound” the
calculated zero sequence voltage will always be zero. The
measurement of 3 I0 can also be calculated as the sum of the
phase currents, in models in which there isn’t a transformer
assigned for that measurement
.
3
2
Tripping zone
1
Locking zone
2
Angle covered by the tripping zone
3
Setting angle
4
Figure 4.7. Homopole sequence directional
4
64
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Protection functions. Description and settings
Trip permission without V
(Directional Locking on the
pol
display)
This setting is used when the polarization voltage (3 V
) falls
0
below the threshold (setting V polarization), so that if it is
set as “YES”, it indicates forwards and if it is set as “NO”, it
indicates reverse.
4.6.4. Neutral directional (67N); polarization by S-(V2)
Operation with polarization by V2, reverse sequence voltage
The direction is determined using the negative sequence
current with the negative sequence voltage (V
) as
2
polarization. The angle determines the range in which the
fault is considered forwards and reverse. The setting angle
is the same as that used for the phase directional.
There is a 5
th
zone between the locking zone and the trip
zone, for which the present directional status is maintained.
Signaling
It provides forward and reverse signaling.
Being the trip permission without V
(Directional Locking)
pol
set as “NO” if the polarization magnitudes are below the
threshold, the direction is not signaled.
Being the trip permission without V
(Directional Locking)
pol
set as “YES” if the polarization magnitudes are below the
threshold, it signals reverse and forward.
Trip permission without V
(Directional Locking on the
pol
display)
This setting is used when the polarization voltage (V
) falls
2
below the threshold (V polarization setting), so that, if it is
set as “YES”, it indicates forwards and if it is set as “NO”, it
indicates reverse.
Signaling
90 - setting angle < arg (I2) – arg (V2) < 270 - setting angle
1
3
2
Trip zone
1
Locking zone
2
Setting angle
3
Figure 4.8. Negative sequence directional
It provides forward and reverse signaling.
Being the trip permission without V
(Directional Locking)
pol
set as “NO”, if the polarization magnitudes are below the
threshold the direction is not signaled.
Being the trip permission without V
(Directional Locking)
pol
set as “YES”, if the polarization magnitudes are below the
threshold signals reverse and forward.
IG-150-EN version 04; 03/10/16
65

Protection functions. Description and settings General instructions
ekor.rps
4.6.5. Neutral directional (67N); polarization by S0+S-(V0+V2)
Operation with polarization by V0andV
2
The direction is determined regardless of the previous
criteria. If any of them determines that the direction is the
trip direction, the trip permission is given.
Trip permission without V
(Directional Locking on the
pol
display)
This setting is used only when in both of the previous
units the polarization magnitude is below the threshold
(Vpolarization setting).
4.6.6. Neutral directional (67N); polarization by I
Operation with polarization by current
The direction is determined comparing the earthing current
(I
) with the neutral current. The trip direction happens
pol
when both currents are in phase.
Signaling
It provides forward and reverse signaling. The directional
units output is an OR of the polarization by voltage and
polarization by current units so that the trip permission
criterion prevails over the locking criterion.
Being the trip permission without V
(directional locking)
pol
set as “NO”, if the polarization magnitudes are below the
threshold the direction is not signaled.
Being the trip permission without V
(Directional Locking)
pol
set as “YES”, if the polarization magnitudes are below the
threshold signals reverse and forward.
Locking by lack of polarization
If the polarization current (I
) falls below a threshold
pol
(0.068A), it indicates that the fault is reverse and there is no
trip permission.
For the direction to be checked the following condition
must be fullled I
There is a 5
th
>0.068A
pol
zone between the locking zone and the trip
zone, for which the present directional status is maintained,
both if it is polarized by voltage or by current.
1
2
2
Trip zone
1
Locking zone
2
90 - Torque line
3
Figure 4.9. Zero sequence directional
Signaling
It provides forward and reverse signaling.
66
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Protection functions. Description and settings
4.6.7. Neutral directional (67N); polarization by S0+I(V0+I
Operation
The direction is determined regardless of the previous
criteria (V
and I). If any of them determines that the
0
direction is the trip direction, the trip permission is given.
The earth fault directional output is an OR of the polarization
by voltage and polarization by current units so that the trip
permission criterion prevails over the locking criterion.
Trip permission without V
(Directional Locking on the
pol
display)
This setting is used only when in both of the previous
units the polarization magnitude is below the threshold
(V polarization setting) in the case of the V
and below
0
68mA in the case on the current.
4.6.8. Neutral directional (67N); polarization by S– + I(V2+I
)
pol
Signaling
It provides forward and reverse signaling. The directional
units output is an OR of the polarization by voltage and
polarization by current units so that the trip permission
criterion prevails over the locking criterion.
Being the trip permission without V
(Directional Locking)
pol
set as “NO”, if the polarization magnitudes are below the
threshold the direction is not signaled.
Being the trip permission without V
(Directional Locking)
pol
set as “YES”, if the polarization magnitudes are below the
threshold signals reverse and forward.
)
pol
Operation
The direction is determined regardless of the previous
criteria (V
and I). If any of them determines that the
2
direction is the trip direction, the trip permission is given.
The earth fault directional units output is an OR of the
polarization by voltage and polarization by current units so
that the trip permission criterion prevails over the locking
criterion.
Trip permission without V
(Directional Locking on the
pol
display)
This setting is used only when in both of the previous
units the polarization magnitude is below the threshold
(V polarization setting) in the case of the V
and below
2
68mA in the case of the current.
Signaling
It provides forward and reverse signaling. The directional
units output is an OR of the polarization by voltage and
polarization by current units so that the trip permission
criterion prevails over the locking criterion.
Being the trip permission without V
(Directional Locking)
pol
set as “NO”, if the polarization magnitudes are below the
threshold the direction is not signaled.
Being the trip permission without V
(Directional Locking)
pol
set as “YES”, if the polarization magnitudes are below the
threshold signals reverse and forward.
IG-150-EN version 04; 03/10/16
67

Protection functions. Description and settings General instructions
ekor.rps
4.6.9. Neutral directional (67N); polarization by S0 + S- + I (V0 + V2 + I
Operation
The direction is determined regardless of the previous
criteria (V
,V2 and I). If any of them determines that the
0
direction is the trip direction, the trip permission is given.
Signaling
It provides forward and reverse signaling. The directional
units output is an OR of the polarization by voltage and
polarization by current units so that the trip permission
criterion prevails over the locking criterion.
The earth fault directional units output is an OR of the
polarization by voltage and polarization by current units so
that the trip permission criterion prevails over the locking
criterion.
Being the trip permission without V
set as “NO”, if the polarization magnitudes are below the
threshold the direction is not signaled.
Being the trip permission without V
Trip permission without V
display)
(Directional Locking on the
pol
set as “YES”, if the polarization magnitudes are below the
threshold signals reverse and forward.
This setting is used only when in the three units the
polarization magnitude is below the threshold (V
polarization setting) in the case of the V
and the V2 and
0
below 68 mA in the case of the current.
pol
)
((Directional Locking)
pol
(Directional Locking)
pol
68
IG-150-EN version 04; 03/10/16

General instructions
P =
Im(I)
ekor.rps
4.6.10. Neutral directional (67N); watimetric directional
Protection functions. Description and settings
It is used for lines with compensations by means of Petersen
coil.
In order to allow the pick up of the directional unit the
following must be fullled:
1. Exceed the V
minimum threshold.
n
2. For forwards faults the angle between the current and
the voltage, displaced the maximum torque angle, and
must be between 97 and 263.
3. 97<ang(I
)– angle(V0)+angle characteristics<263.
0
(Re(V) ⋅ cos(φ) + Im(V) ⋅ sin(φ)) ⋅ Re(I) + (Im(V) ⋅ cos(φ) – Re(V) ⋅ sin(φ)) ⋅
4. For backwards faults the angle between the current
and the voltage, displaced the maximum torque angle,
and must be between 277 and 83.
5. 277<ang(I
6. The power P = V
)–angle(V0)+angle characteristics<83.
0
•cos (j-jc) must exceed the P
r•Ir
minimum threshold in absolute value. If P sign is
negative, the fault is forward. It is positive it is reverse.
The equation to calculate P is the following one:
Tripping Zone
1
Locking zone
2
Figure 4.10. Neutral directional
IG-150-EN version 04; 03/10/16
69

Protection functions. Description and settings General instructions
I·cos
(
│V│
ekor.rps
4.6.11. Neutral directional (67N); I*cos (φ)/I*sen (φ) directional
An input (“67N Isen (j) or Icos (j)”) can be programmed
and when it gets activated the I*cos (j) operation mode
changes to I*sen (j). This input, if programmed, cancels the
I*cos (φ) directional
In order to allow the pick up of the directional unit, the
following must be fullled:
1. Exceed the V
2. The minimum current I
the minimum threshold in absolute value. If the sign is
negative, the fault is forward. If it is positive, it is reverse.
3. For forwards faults, the angle between the current and
the voltage, displaced the maximum torque angle, and
must be between 97 and 263.
97<ang(I0)–ángle(V0)+characteristic angle<263
minimum threshold.
n
= Ir•cos (j-jc) must exceed
minimum
(
v – i – φ
Re(V) ⋅ cos(φ) + Im(V) ⋅ sin(φ)) ⋅ Re(I) + (Im(V) ⋅ cos(φ) – Re(V) ⋅ sin(φ)) ⋅ Im(I)
)
=
setting: If it is deactivated the algorithm I*cos (j) is carried
out and if it is activated, the I*sen (j), regardless the setting.
It does not aect the watimetrical directional or the angular.
4. For backwards faults, the angle between the current
and the voltage, displaced the maximum torque angle,
and must be between 277 and 83.
277<ang(I0)-angle(V0)+characteristic angle<83
The trip zone depends on the angle between the zero
sequence voltage and the zero sequence current. If we are in
the trip zone, the directional gives trip permission when the
Io•cos (j-jc) value exceeds the setting (in negative value).
Tripping zone
1
Locking zone
2
Figure 4.11. I*cos(φ) directional
70
IG-150-EN version 04; 03/10/16

General instructions
I·sin
(
│V│
ekor.rps
As the neutral units allow the trips with forward and reverse
faults the characteristics will have the following form:
I*sen(φ) directional
Protection functions. Description and settings
Backwards
1
Forwards
2
Figure 4.12. Trip with forward and reverse faults
In order to allow the pick up of the directional unit, the
following must be fullled:
1. Exceed the Vr minimum threshold.
2. The minimum current I
the minimum threshold set in absolute value. If the
sign is negative, the fault is forward. If it is positive, it
is reverse.
(
v – i – φ
=Ircos(j-jc) must exceed
mínima
Im(V) ⋅ cos(φ) + Re(V) ⋅ sin(φ)) ⋅ Re(I) + (Re(V) ⋅ cos(φ) – Im(V) ⋅ sin(φ)) ⋅ Im(I)
)
=
3. For forwards faults, the angle between the current and
the voltage, displaced the maximum torque angle, and
must be between 187 and 353.
187<ang(I0)–angle(V0)+characteristic angle<353
4. For backwards faults, the angle between the current
and the voltage, displaced the maximum torque angle,
and must be between 7 and 173.
7<ang(I0)–angle(V0)+characteristic angle<173
Tripping zone
1
Locking zone
2
Figure 4.13. I*sen(φ) directional
IG-150-EN version 04; 03/10/16
71

Protection functions. Description and settings General instructions
ekor.rps
4.7. Sensitive neutral overcurrent protection
4.7.1. General description
Sensitive neutral overcurrent protection, with the same
possible characteristics as the ones described for phases
(except that there is only one instantaneous element), and
independent settings (function 50Ns/51Ns).
4.7.2. Setting ranges of the timed characteristic (6 tables) (normal and HIGH2)
Setting Min Max Step Notes
Enable
Pickup [A]
0.0005 1.0000 0.0001 With standard ratings
0.005 10,000 0.001 With specied ratings
Curve type
Time index
Denite time [s]
0.05
0.5
0.0 1,800.0 0.01
1.09
30.0
These settings can be found in the console on the screen “overcurrent protection (1)”
Table 4.10. Setting ranges of the timed characteristic
0.01
0.1
YES/NO/pickup/YES+drop
Denite time
Normal inverse curve, very inverse curve,
extremely inverse curve
User curve
For IEC curves
For ANSI curves
The remarks about curves and accuracy in times are the
same as the ones quoted for phases.
4.7.3. Setting ranges of the instantaneous characteristic (single level) (6 tables) (normal and HIGH2)
Setting Min Max Step Notes
Enable
Sensitive neutral instant. trip [A]
Additional time [s]
0.0005 1,0000 0.0001 With standard ratings
0.005 10.0 0.001 With specied ratings
0.00 600.00 0.01
Special operation
These settings can be found in the console on the screen “overcurrent protection (1)”
Table 4.11. Setting ranges of the instantaneous characteristic
YES/NO/pick up
See “instant. special operation”
The tripping current is set to secondary amps. The remarks about operating times are the same as the
ones quoted for phases.
72
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
4.7.4. Directionality
Protection functions. Description and settings
In case the model has the “neutral directional” and the
“sensitive neutral” units, the later can also be directional,
for which it has the “torque control” setting (set to “YES”, it
The directional watrimetic and the cosine type directional
are almost the same, with the only dierence that one is set
to W and the other one to A.
indicates that it is directional, set to “NO”, it indicates that
it is not).
The corresponding settings are in “current protection (3)”
screen.
There are four types of directional for the sensitive neutral.
The angle (polarization by V
, it works as the neutral one),
0
the watimetric, the I•cos (j) and the I•sen (j)
They work as a torque control of the sensitive neutral units.
These units are set in order to trip backwards or forwards.
Setting Min. Max. Step
Directional type
Minimum active
power (homopole)
Characteristic
angle φ
I
Table 4.12. Directionality
c
minimum
Angular
I•cos(j)/I•sen(j)
watimétric
0–100W 0,01W For the watimetric directional
P= V
• Ins• cos(j-jc)
n
j =angle between VnandI
If the power is higher than this value in negative value it is considered as a forward
fault it is higher than this value in positive, it will be a backwards fault
0-350° 1° For all the sensitive neutral directional
Setting that allows taking into account the characteristics of the system that can be
used in lines with isolated neutral or with Petersen coil
Common setting with the cosine directional of j
5mA–10A 0,001A It is used for the directional I•cos(j) and the I•sen(j)
I
=Ins•cos(j-jc)
minimum
j=angle betweenVnandI
If the minimum I is higher than this value in negative value, it is considered to be
forward fault If it is higher than this value in positive it is a backward fault
n
ns
IG-150-EN version 04; 03/10/16
73

Protection functions. Description and settings General instructions
P =
Im(I)
ekor.rps
Watimetrical directional
It is use for those lines with compensation via Petersen coil.
In order to allow the directional unit pickup, the following
must be fullled.
1. Exceed a minimum threshold of V
r
2. For forwards faults, the angle between the current and
the voltage, displaced the maximum torque angle, and
must be between 97 and 263
97<ang(I0)–angle(V0)+characteristic angle<263
(Re(V) ⋅ cos(φ) + Im(V) ⋅ sin(φ)) ⋅ Re(I) + (Im(V) ⋅ cos(φ) – Re(V) ⋅ sin(φ)) ⋅
3. For backwards faults, the angle between the current
and the voltage, displaced the maximum torque angle,
and must be between 277 and 83
277<ang(I0)–angle(V0)+characteristic angle<83
4. The power P=VrInscos(j-jc) must exceed the minimum
threshold of P in absolute value. If P sign is negative, the
fault is forwards. If it is positive, it will be backwards.
The equation to be done to calculate P is the following one:
Tripping zone
1
Locking zone
2
Figure 4.14. 4.7.4.1. Watimetrical directional
74
IG-150-EN version 04; 03/10/16

General instructions
I·cos
(
│V│
ekor.rps
I*cos(φ)/I*sen(φ) directional
Protection functions. Description and settings
It works as a torque control of the neutral sensitive unit.
It has an input (“67NS Isen(j) or Icos(j)”), twhich when it
is activated it changes the operation mode from I•cos (j)
to I•sen(j). This input, if programmed cancels the setting;
if deactivated it carries out the algorithm I*cos(j) and if it
deactivated the I*sen(j), regardless the setting. It does not
aect the watrimetic or the angular directional.
I*cos(φ) direccional
In order to allow the picking up of the directional unit the
following conditions must be fullled:
1. Exceed a V
2. The minimum current I
the minimum threshold in absolute value. If the sign
is negative, the fault is forwards. If it is positive, it is
backwards.
minimum threshold.
n
=Irsects(j-jc) must exceed
mínima
(
v – i – φ
Re(V) ⋅ cos(φ) + Im(V) ⋅ sin(φ)) ⋅ Re(I) + (Im(V) ⋅ cos(φ) – Re(V) ⋅ sin(φ)) ⋅ Im(I)
)
=
3. For forwards faults the angle between the current and
the voltage, displaced the maximum torque angle, and
must be between 97 and 263.
97<ang(I0)–angle(V0)+characteristic angle<263
4. For backwards faults the angle between the current
and the voltage, displaced the maximum torque angle,
and must be between 277 and 83.
277<ang(I0)–angle(V0)+characteristic angle<83
The trip zone depends on the angle between the zerosequence voltage and the zero-sequence pole current. In
the trip zone, the directional allows the trip when the I0•cos
(j-jc) value exceeds the setting (in negative value).
Tripping zone
1
Locking zone
2
Figure 4.15. I*cos(φ) directional
IG-150-EN version 04; 03/10/16
75

Protection functions. Description and settings General instructions
(
│V│
ekor.rps
As the sensitive neutral units allow the trip with forwards
and backwards faults, the characteristics will be as follows.
Backwards
1
Forwards
2
Figure 4.16. Forwards faults and backwards faults
I*sen(φ) directional
In order to allow the picking up of the directional unit the
following conditions must be fullled:
1. Exceed a V
2. The minimum current I
minimum threshold.
n
minimum
=Ins sen (j-jc) must
exceed the minimum threshold in absolute value. If the
sign is negative, the fault is forwards. If it is positive it is
backwards.
I·sin(v – i – φ
)
Im(V) ⋅ cos(φ) + Re(V) ⋅ sin(φ)) ⋅ Re(I) + (Re(V) ⋅ cos(φ) – Im(V) ⋅ sin(φ)) ⋅ Im(I)
=
3. For forwards faults the angle between the current and
the voltage, displaced the maximum torque angle, and
must be between 187 and 353.
4. 187<ang(I
)–angle(V0)+characteristic angle<353.
0
5. For the angle between the current and the voltage,
displaced the maximum torque angle, and must be
between 7 and 173.
7<ang(I0)–angle(V0)+characteristic angle<173.
Figure 4.17. I*sen(φ) directional
76
IG-150-EN version 04; 03/10/16

General instructions
3•
ekor.rps
4.8. Current unbalance protection
4.8.1. General description
Protection functions. Description and settings
It contains the timed and instantaneous unbalance
protection functions.
It must be taken into account that the phase
sequence A-B-C or C-B-A is programmable, so that
the I2 depends on that setting.
The protection works exactly in the same way as the phase
overcurrent protection, taking as measurement input 3
times the modulus of negative sequence current.
I
2
= Ia + a
2
• Ib + a • Ic
Where a=1|120°
4.8.2. Setting ranges of the timed characteristic (6 tables)
Setting Min Max Step Notes
Enable
Pickup.[A]
0.02 40.00 0.01 With standard ratings
0.1 200.0 0.01 With specied ratings
Curve type
Time index
Denite time [s]
0.05
0.5
0 600.0 0.01
1.09
30.0
0.01
0.1
These settings can be found in the console on the screen “Overcurrent protection (1)”. TIME SETTING UNBALANCE box
YES/NO/pickup/YES+drop
Denite time
Normal inverse curve, very inverse curve,
extremely inv. curve
User curve
For IEC curves
For ANSI curves
Table 4.13. Setting ranges of the timed characteristic
The remarks about curves are the same as the ones quoted
for phases.
4.8.3. Setting ranges of the instantaneous characteristic (6 tables)
Setting Min Max Step Notes
Enable YES/NO/pickup/YES+drop
Unbalance instantaneous trip [A] 0.02 40.00 0.01 With standard ratings
0.1 200.0 0.01 With specied ratings
Additional time [s] 0 60.00 0.01
These settings can be found in the console on the screen “Overcurrent protection (1)”. TIME SETTING UNBALANCE box
Table 4.14. Setting ranges of the instantaneous characteristic
The remarks about curves are the same as the ones quoted
for phases
IG-150-EN version 04; 03/10/16
77

Protection functions. Description and settings General instructions
ekor.rps
4.9. Broken conductor protection
4.9.1. General description
It is a denite time protection unit. The starting value which
is set is, in per unit, the module ratio between the negative
and positive sequence currents.
The relay trips when the programmed time has expired
since the starting setting value is exceed. To be operational,
this unit requires that the current of any of the phases is
at least 0.3 A, and both the direct and reverse sequence at
Ia + a
I
2
=
= Ia + a • Ib + a
I
2
2
• Ib + a • Ic
2
• Ic
Where a=1|120°
least 0.15 A (secondary).
4.9.2. Setting ranges (6 tables)
Setting Min Max Step Notes
Enable
Pickup
Denite time [s]
These settings can be found in the console on the screen “Overcurrent protection (2)”. OPEN PHASE box
Table 4.15. Setting ranges
0.10 0.50 0.01 Ir per unit. I2/I
0.05 300.0 0.01
YES/NO/pickup
4.10. Phase characteristic voltage control (function 51 V/50 V)
The timed phase overcurrent protection function can be
controlled by voltage, in the way that the starting current
decreases if the voltage control is lower than the nominal
voltage. To activate this function the setting "voltage
acceleration" of the settings screen “overcurrent protection
1 – phases” (or by keyboard/display the PROTECTIONCURRENT PROT.-PHASE TOC.- ACCEL. ENABLE) must be set
to "YES". (If it is set to NO, the eective settings are the ones
programmed in the time delay phase overcurrent unit).
The control by voltage has two possible operation ways,
depending on the setting of the "voltage control" on the
screen number 3 of the overcurrent protection settings
(or by keyboard/display in PROTECT. FUNCTION-PA.CRTLVENABLE). If it is set to NO, the unit operates in control mode
1 and if it is set to YES, in control mode 2.
1
4.10.1. Mode 1 (51V)
The pickup current is controlled by the compound voltage V,
corresponding to that phase, used as control. This function
aects both levels of timing.
When the control voltage is 10 % of the nominal voltage, the
controlled pickup current is 10 % of the programmed value.
78
When the control voltage is 90 % of the nominal voltage, the
controlled pickup current is 90 % of the programmed value.
Between both values, the pickup current variation is lineal
in respect to the control voltage.
For control voltage values higher than 90 % of the nominal
voltage, the pickup current is the programmed one.
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
4.10.2. Mode 2 (51V)
Protection functions. Description and settings
IWhen the control voltage is lower than the control voltage
(one programmed value), the eective settings of the
function 51 stop being the programmed in "phase time
unit", to become the programmed as “voltage controlled”.
In order to retrieve the “phase timing” setting, the three
voltages must be higher than the control voltage.
This function is subordinated to the phase timed unit, in the
sense of making it operative with other settings, but if the
phase time delayed function is not enable, the function 51V
has no eect. This function aects.
4.10.3. Mode 2 (50 V)
In an analogue way to the former one, when some of the
compound voltages are lower than the control voltage (one
programmed value), the eective settings of the function
50 stop being those programmed in "phase instantaneous
unit" (as much in low as in high level), to become the
programmed as “control by voltage”.
This function is subordinated to phase instantaneous, in the
sense of making them operative with other settings, but if
both phase instantaneous functions are not enabled, the
function 50 V has no eect. All the instantaneous functions
The settings are the following:
1. Enable control by voltage: YES/NO (as it has been said
YES means operating in mode 1, NO in mode 2, as long
as the phase time delay "Acceleration" is set to YES).
2. Voltage control: 10 to 200 V.
3. Phase timed unit’s setting group (pickup, curve, time,
etc.), corresponding to “control by voltage”.
(normal, “high1” and “high2”, if existed) are aected and
they start operating with the same values.
The settings are the following:
1. Enable: YES/NO (YES means operating in mode 2, NO
means not operating).
2. Voltage control: 10 to 200 V.
3. Settings of phase instantaneous characteristic (pickup,
time), corresponding to “control by voltage”.
4.10.4. Summary
The function 51 V can operate in mode 1 or mode 2.
The function 50 V can operate only in mode 2.
It is possible the operation of the function 51 V in mode 1
and the function 50 V in mode 2
.
The setting change does not aect the enablings of the
functions aected.
In order to operate the voltage control (in any mode) the
setting “boosting by voltage” hast to be at YES
.
IG-150-EN version 04; 03/10/16
79

Protection functions. Description and settings General instructions
ekor.rps
4.11. High current lockout
4.11.1. Description
There are two other instantaneous settings groups, one
for phases and other for neutral (not for sensitive neutral).
They are dierent from the usual ones for the two following
characteristics:
4.11.2. Setting (table 0, single)
They are accessible through keyboard/display in "table 0" "protection" – “high current lockout", or through console in
“overcurrent protection (3)” and they are:
1. “Phase high current lockout”
a. Phase enable: YES/NO
b. Trip number: 1 to 4
c. Pickup: 0.1 to 200 A
d. Additional time: 0 to 60 s
4.12. Cold load pickup
4.12.1. Description
If they give a trip, it will be moved on to denitive trip’
The number of trip is programmable (1 to 4) within the
sequence of running cycle from which the function is active.
2. “Neutral high current lockout”
a. Neutral enable: YES/NO
b. Trip number: 1 to 4
c. Pickup: 0.1 to 100 A
d. Additional time: 0 to 60 s
This function aims to avoid non wished trips in the following
situation: After being the line de-energized for a period of time
and re-energized later, the load can exceed the protection
setting without the presence of a fault. This may be due to
the accumulative inrush current caused when connecting all
the loads (furnaces, heaters, coolers, etc.) at the same time.
This phenomena can occur not only at the moment of the
breaker manual closing, after having remained open for a
certain time, but also with the breaker permanently closed
due to the operation of another upstream breaker.
What the function does is detecting when those conditions
are given and changing the tripping settings during a
programmable time
.
The function is activated when the current in the 3 phases
is below 10 mA, then the programmed time starts to run to
determine that the load is “cold” (this time can be 0, what
means that any circuit breaker opening leads to the cold
load situation). Once that time has expired and the current
has not exceed again 12 mA, the protection usual setting
values are replaced by the cold load pickup ones. When
any of the phase current exceed 12 mA, a counter with
programmable time starts, during which the setting are the
cold load pickup ones, when expiring this time, the setting
are again the usual ones.
80
IG-150-EN version 04; 03/10/16

General instructions
23
23
ekor.rps
4.12.2. Settings (table 0, single)
Protection functions. Description and settings
They are accessible through keyboard/display in "table 0" - "
special protections" - "cold load" , or through console on the
screen “overcurrent prot.-cold load” and they are the ones
which replace the standard functions when that condition
is given:
1. Phase time unit
2. Neutral time unit
3. Phase instantaneous unit
4. Neutral instantaneous unit
5. Sensitive neutral time unit
6. Sensitive neutral instantaneous unit
They are also under the name "cold load pickup" the ones
which dene the function activity range:
1. “Cold load” enable: YES/NO.
2. Cold load time: 0 to 10 000 s. In console “cold load time”.
1
I
45
3. Operating time of “cold load” settings: 0.1 to 3600 s
(1 hour) with 0.01 s resolution in console “duty time”.
During this time, after coming back the current (>0.2 A)
all the overcurrent protection settings (phase, neutral
and sensitive neutral) stop being the corresponding
to the “active table” and become the corresponding to
“cold load”: Enabling actions, pickups, curves, times, etc.
Remarks
The function “cold load” is de-activated while the unit is
on “ongoing cycle”, this means while the closing control is
assumed by the reclosing function.
The function “cold load” does not operate on the “high
current lockout” settings.
0,2 A
0,1 A
Usual settings
1
Cold lood settings
2
Usual settings
3
Cold lood time
4
Actuation time
5
Figure 4.18. Example with breaker opening and closure
I
0,2 A
0,1 A
Usual settings
1
Cold lood settings
2
Usual settings
3
Cold lood time
4
Actuation time
5
1
45
Figure 4.19. Example with very low load
IG-150-EN version 04; 03/10/16
81

Protection functions. Description and settings General instructions
ekor.rps
4.13. Isolated neutral protection
4.13.1. General description
The “Directional zero sequence relay” incorporated in the
relay carries out a directional protection against earth faults
in isolated neutral systems (67IN function). It can be used as
non directional.
1. Input signals
Zero sequence current (IG): Comes from the connection in
parallel of the secondaries of 3 phase current transformers or
from a toroid transformer embracing the 3 phases.
Zero sequence voltage (V
for each phase, it can be calculated internally. Other ways, it is
measured from the open delta of three voltage transformers,
with secondary nominal voltage of 110/√3 V. A setting
indicates which of the procedures is used.
): If there are simple voltage signals
G
2. Measurements range
Current: 2 mA to 1 A
Voltage: 0.5 V to 200 V (3*110/√3 V)
The characteristic curve of this protection function is the
following:
They are settable parameters
1. Enable. If it is set to YES allows the protection units
actuation; set to NO inhibits the actuation and in pickup
it operates but without tripping.
2. Torque control (“external lock”). If it is set to “YES”, it
operates as directional, checking the angle between V
G
and IG; if it is set to “NO” it does not check the angle, that
is it works as non directional.
3. Low current (I
in the characteristic curve). Range 0.005
L
to 1 A, with 1 mA resolution.
4. High current (I
). Range 0.005 to 1 A, with 1 mA
H
resolution.
5. I
> = IL must be fullled
H
6. Low voltage (V
7. High voltage (V
). Range 0.5 V to 60 V. 0.1 V resolution.
L
). Range 0.5 V to 60 V. 0.1 V resolution.
H
VH > = VL must be fullled.
8. First trip timing. Range 0 to 60 s. 0.01 s resolution.
9. Switch to instantaneous timing. Range 0 to 10 s. 0.1 s.
resolution.
Operating as directional, the relay trips when the point
dened by the measured V
and IG values is within the
G
trip zone of the characteristic curve, being the DELAYED
with respect to VG an angle in the interval 90 º ± 45 º. As
“Non directional” the only trip condition is to be within the
characteristic zone, regardless of the angle.
Trip zone
1
Figure 4.20. Characteristic curve
4.13.2. Setting ranges
Parameter Min Max Step Notes
Enable
Torque control (external lock)
Low current [A]
High current [A]
Low voltage [V]
High voltage [V]
First trip timing [s]
Switch to instantaneous timing
The rst trip is timed according to the corresponding
setting parameter, the successive trips that happen during
the time programmed as “switching time” starting from that
rst trip are instantaneous; the rst one from that time is
timed again.
YES/NO
0.005 1 0.001
0.005 1 0.001
0.5 60.0 0.1
0.5 60.0 0.1
0.00 60.0 0.01
0.0 10.0 0.1
82
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
4.14. Overvoltage protection
4.14.1. General description
Protection functions. Description and settings
Three-unit overvoltage protection, which can be simples
or compounds (see “General settings”), with following
selectionable characteristics to choose from (function 59):
Timed characteristic (programmable curves IEC or ANSI)
1. Inverse normal time (I BSC or I ANSI)
2. Inverse short time (IC BSC)
3. Inverse long time (IL BSC)
4. Very inverse time (MI BSC or MI ANSI)
5. Extremely inverse time (EI BSC or EI ANSI)
4.14.2. Setting ranges of the timed characteristic (6 tables)
Setting Min Max Step Notes
Enable
Pickup [V]
Curve type
Time index
Denite time [s]
Table 4.16. Setting ranges of the timed characteristic (6 tables)
10 200 0,1
0.05
0.5
0.0 600.0 0.01
6. Very inverse special time (MIEs BSC)
7. Moderately inverse time (ANSI)
8. 4 User curve (USER 1 up to USER 4)
9. Denite time
Instantaneous characteristic
1. Instantaneous unit
2. Additional time
The functioning of this protection does not cause automatic
reclosing.
YES/NO
Denite time
Normal inverse curve
Short inverse curve
Long inverse curve
Very inverse curve
Extremely inverse curve
Very inverse special curve
Moderately inverse curve
User curve
1.09
30.0
0.01
0.1
For IEC curves
For ANSI curves
These settings can be found in the console on the screen
“voltage protection”.
The timed curves are the same as the ones used by the
overcurrent protection units.
The pickup voltage is set to secondary volts.
Working with denite time, the relay will trip at the end of
the programmed time since the pickup voltage is exceeded,
independently of the voltage value
.
IG-150-EN version 04; 03/10/16
Working with curve, the tripping time depends on the
selected curve (family and index) and on the voltage value.
In the Appendix II are given the graphics and formula for
calculating the time, in function of the ratio between the
voltage and the pickup voltage.
The remarks about accuracy in times are the same as the
given for the overcurrent function
.
83

Protection functions. Description and settings General instructions
ekor.rps
4.14.3. Setting ranges of the Instantaneous characteristic (6 tables)
Setting Min Max Step Notes
Enable YES/NO
Phase instantaneous trip [V] 10 200 0.1
Additional time [s] 0.00 60.00 0.01
Table 4.17. Setting ranges of the Instantaneous characteristic (6 tables)
These settings can be found in the console on the screen
“voltage protection”.
The tripping voltage is set to secondary volts.
The remarks about times are the same as those given for the
overcurrent function
4.15. Undervoltage protection
4.15.1. General description
Three-unit overvoltage protection, which can be simples
or compounds (see “General settings”), with following
selectable characteristics to choose from (function 59):
Timed Characteristic:
1. Inverse normal time (I BSC or I ANSI)
2. Inverse short time (IC BSC)
3. Inverse long time (IL BSC)
4. Very inverse time (MI BSC or MI ANSI)
5. Extremely inverse time (EI BSC or EI ANSI)
6. Very inverse special time (MIEs BSC)
.
In both the timed and instantaneous
functions, once the protection starts up, the
drop takes place when the voltage drops to
99 % of the start set value, if it is higher than
50 V (or to 98 % if it is lower)
7. Moderately inverse time (ANSI)
8. 4 User curves (USER 1 up to USER 4)
9. Denite time
Instantaneous characteristic:
1. Instantaneous unit
2. Additional time
The functioning of this function does not cause automatic
reclosing.
4.15.2. Setting ranges of the timed characteristic (6 Tables)
Setting Min Max Step Notes
Enable
Pickup [V]
Curve type
Time index
Denite time [s]
Table 4.18. Setting ranges of the timed characteristic
84
10 200 0.1
0.05
0.5
0.0 600.0 0.01
IG-150-EN version 04; 03/10/16
1.09
30.0
0.01
0.1
YES/NO
Denite time
Normal inverse curve
Short inverse curve
Long inverse curve
Very inverse curve
Extremely inverse curve
Very inverse special curve
Moderately inverse curve
User curve
For IEC curves
For ANSI curves

General instructions
ekor.rps
Protection functions. Description and settings
These settings can be found in the console on the screen
“voltage protection”.
Working with curve, the tripping time depends on the
selected curve (family and index) and on the voltage value.
In the appendix II are given the graphics and formula for
The timed curves are the same as the ones used by the
overcurrent protection units.
The pickup voltage is set to secondary volts.
Working with denite time the relay trips once expired the
calculating of time, in function of the ratio between the
starting voltage and the voltage.
The remarks about times are the same as the ones quoted
for the overcurrent function.
programmed time since descending below the pickup
voltage, independently of the voltage value.
4.15.3. Setting ranges of the instantaneous characteristic (6 tables)
Setting Min Max Step Notes
Enable YES/NO
Phase instantaneous trip [V] 10 200 0.1
Additional time [s] 0.00 60.00 0.01
Table 4.19. Setting ranges of the instantaneous characteristic
These settings can be found in the console on the screen
“voltage protection”.
In both the timed and instantaneous
The tripping voltage is set to secondary volts.
The remarks about times are the same as the ones quoted
for the overcurrent function.
functions, once the protection starts up, the
drop takes place when the voltage drops to
101 % of the start set value, if it is higher than
50 V (or to 102 % if it is lower).
4.16. Voltage unbalance protection
4.16.1. Timed characteristic
It is a denite time protection unit. The pickup value set
is, in per unit the ratio between the negative and positive
sequence voltage modulus.
Settings ranges (6 tables)
Setting Min Max Step Notes
Enable YES/NO
Pickup 0.10 0.50 0.01 In per unit. V
Denite time [s] 0.0 600.0 0.01
Table 4.20. Settings ranges
These settings can be found in the console on the screen
“overcurrent protection (2)”.
The relay trips once expired the programmed time since the
pickup value is exceeded.
2/V1
IG-150-EN version 04; 03/10/16
85

Protection functions. Description and settings General instructions
ekor.rps
4.16.2. Instantaneous characteristic
It is a denite time protection unit. It only checks if the
phase order is the programmed one or the opposite one. In
the case that the order is opposite to the programmed one
it will trip after a programmed time.
Settings ranges (6 tables)
Setting Min Max Step Notes
Enable
Denite time [s]
Table 4.21. Setting range
0.00 60.00 0.01
YES/NO
The settings of both characteristics can be found in the
console on the screen “voltage protection”.
4.17. Zero sequence overvoltage protection
Zero sequence overvoltage protection (function 64 or 59N).
The pickup value set is the zero sequence voltage coming
from the open delta connection of the secondaries of the
three voltage transformers or the calculated zero sequence
voltage (3 V0) as vectorial sum of the phase simple voltages.
The setting dening whether the voltage is measured or
calculated is only accessible through keyboard/display, in
“Program table 0” – “dene protect.” (key #$8 8 ) – “neutral
parameter”. At this point and under the text “NEUTRAL V
TRANSF.”, 3 possibilities can be chosen: “No transf” (in this
case the calculated value will be used), “voltage transf. 9” or
“voltage transf. 5” (depending on the concrete HW model
of the unit)
The function has the following characteristics to choose
from.
Timed characteristic (IEC or ANSI programmable curves)
1. Inverse normal time (I BSC or I ANSI)
2. Inverse short time (IC BSC)
3. Inverse long time (IL BSC)
4. Very inverse time (MI BSC or MI ANSI)
5. Extremely inverse time (EI BSC or EI ANSI)
6. Very inverse special time (MIEs BSC)
7. Moderately inverse time (ANSI)
8. 4 User curves (USER 1 up to USER 4)
9. Denite time
Instantaneous characteristic
1. Instantaneous unit
2. Additional time
The functioning of this protection does not cause an
automatic reclosing
The function can be deactivated by setting (timed and
instantaneous at the same time)
86
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
4.17.1. Setting range (6 tables)
Setting Min Max Step Notes
Enable
Pick up [V]
Curve type
Time index
Denite time [s]
Instantaneous pickup [V]
Additional time [s]
Table 4.22. Setting range
Protection functions. Description and settings
2 200 0.1
0.05
0.5
0 600.0 0.01
2 200 0.1
0 60.00 0.01
1.09
30.0
0.01
0.1
YES/NO (see note)
Denite time
Normal inverse curve
Short inverse time
Long inverse time
Very inverse curve
Extremely inverse curve
Very inverse special curve
Moderately inverse curve
User curve
For IEC curves
For ANSI curves
These settings can be found in the console
on the screen “voltage protection” in the
column “OVERVOLTAGE 3 x V0.”
The time delay curves are the same as the ones used by the
overcurrent protection units.
4.18. Frequency protection
This function has 5 steps, programmable as minimum
frequency or maximum frequency.
Setting Min Max Step Notes
Minimum frequency enable
Pickup [Hz]
Denite time [s]
Type
Table 4.23. independent settings
The common settings for all steps are:
Setting Min Max Step Notes
Minimum supervision voltage [V]
Nº of pickup cycles
Table 4.24. Common settings
40 70 0.01
0 600.00 0.01
12 200 1
3 15 1
The starting voltage is set to secondary volts.
On denite time, the relay trips when the programmed
time expires since the starting voltage is exceeded,
independently of the voltage value.
The settings per step, independent for each step, are as
follows (6 tables):
YES/NO
The time delay of this unit corresponds to the start set cycle
number, more than 35 ms.
IG-150-EN version 04; 03/10/16
In a console, the settings are in the “frequency protection”
screen. The common ones are in “frequency monitoring”.
87

Protection functions. Description and settings General instructions
ekor.rps
4.18.1. Minimum frequency
Each step picks up if the frequency is below the set value
during a number of cycles equal or higher than the setting
“Nr. of pickup cycles”. Once it picks up, the programmed
time must elapse to produce trip. The unit drops out if
during two cycles the frequency is correct.
4.18.2. Maximum frequency
This unit causes pick up if the frequency is above the set
value during a number of cycles equal or higher than
the setting “Nr. of pickup cycles”. Once it picks up the
programmed time must elapse to produce trip. The unit
drops out if during two cycles the frequency is correct.
A trip by this function does not cause recloser actuation.
4.18.3. Frequency gradient
General description
This function has 4 steps. In each step, a relay activation
occurs, if the frequency variation per time unit (frequency
decreasing) is higher than the set value.
Lockings
If the voltage in phase B is lower than the setting “Minimum
supervision voltage”, the frequency units pickup is not
allowed.
Lockings
If the voltage in phase B is lower than the setting “Minimum
supervision voltage” the frequency units pickup is not
allowed.
The function is only eective for frequencies lower than a
threshold called “maximum supervision frequency”, and for
currents higher than a threshold called “Minimum current”.
4.18.3.2.Settings (6 tables)
Setting Min Max Step Notes
Enable. df/dt.
Max. frequency supervision [Hz]
Supervision minimum current [A]
Pickup value (df/dt) [Hz/s]
Denite time [s]
Nº of pickup cycles D81
Table 4.25. Settings
40 70 0.01 (for each step)
0 100.0 0.1 (for all steps)
0.20 5 0.05 (for each step)
0 2 0.01 (for each step)
3 15 1 (for all steps)
YES/NO (for all steps)
In the console, the settings corresponding to each step
are in the square “FREQUENCY DERIVATIVE” on the screen
“frequency protection (1)”. The common settings, minimum
voltage and Nr. of pickup cycles D81 (for the frequency
derivative) are in the square “FREQUENCY SUPERVISION”.
The frequency measurement of each cycle is executed
refreshing it each half cycle, as the gure shows.
The algorithm is executed each 5 ms only if the phase B
voltage has crossed zero.
Both positive and negative crosses are measured but the
frequency measurement is executed in complete cycles.
Figure 4.21. frequency measurement
The frequency is measured up to 35 Hz. Below this value,
the frequency units are not activated.
88
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Protection functions. Description and settings
The algorithm stores the periods of the last 5 cycles of the
signal and calculates the frequency derivative comparing
the frequency measurement of the present cycle with the
measurement 5 cycles before having in account the time
space between both.
df/dt = (f1 - f5)/(T1 + T2 + T3 + T4)
f(Hz)
f5 = frequency measurement 4 cycles ago
f4 = frequency measurement 3 cycles ago
f3 = frequency measurement 2 cycles ago
f2 = frequency measurement 1 cycle ago
f1 = last frequency measurement
T4 = period of the 4th cycle starting from the end
T3 = period of the 3rd cycle starting from the end
T2 = period of the 2nd cycle starting from the end
T1 = period of the last cycle
Figure 4.22. period of the last 5 cycle signal
f5
α=Arctan(df/dt)
f3
f4
T4
T3
f1
f2
T2
T1
t(s)
This calculus is repeated having in account the
measurements separated by two cycles so that it makes
sure that the frequency has been falling the whole time,
that is, it is not a spurious measurement that can lead to a
trip.
For the unit to pickup, the frequency derivative must be
exceeded in module during the set number of cycles minus
4 cycles. That is, if it is set to 5 cycles the frequency rate of
change must be viewed repeated once in order to pickup.
If the setting is 4 or lower the unit picks up the rst time the
measurement is viewed above the threshold (in absolute
value).
The pickup happens only if the value of df/dt is negative,
that is if the present frequency value is lower than the value
5 cycles before.
During the pickup process one measurement is allowed to
be out of the pickup range without restarting the process.
That is, if for example 3 cycles (set to 7 cycles) are required
to cause pickup, it is enough if the threshold is exceeded 3
times out of 4 consecutive measurements.
Once the unit has picked up, for it to trip, the frequency rate
of change measurement must remain between the value of
df/dt set and a dropout value equal to df/dt minus 0.05 Hz/s
during the set time.
If some of the inputs are programmed as breaker associated
to the frequency gradient, the trip is locked until that output
is viewed open.
Once the unit has picked up, for it to dropout the
measurement of df/dt must be seen 0.05 Hz/s below the set
value.
Figure 4.23. Logic
IG-150-EN version 04; 03/10/16
89

Protection functions. Description and settings General instructions
V
)
ekor.rps
Lockings
The frequency derivative units are locked by:
1. Minimum supervision current. If the minimum current
that ows through the phase A is lower than the setting,
the pickup of the frequency derivative unit’s pickup is
not allowed. When a current higher than the threshold
appears, the relay waits 10 cycles before starting to
execute the frequency gradient function.
4.19. Fuse failure
Fuse failure conditions are the following ones:
1. Positive sequence current I
scale (40 A)
[4]
.
2. Positive sequence current I
3. The increase and decrease of the positive sequence
current I
and of the neutral current Ir against the
1
current measure 2 cycles before must be lower than
0.05 % of the full scale (40 A)
4. The increase and decrease of positive sequence current
I
and of the neutral current Ir against the current
1
measured 2 cycles before must be lower than 0.1 A.
5. Positive sequence voltage V
must exceed VFF.
6. Positive sequence voltage V
% of VFF.
above 0.05 % of the full
1
above 0.1 A.
1
[4]
.
memorized 2 cycles before
1
must be lower than the 95
1
2. Minimum supervision voltage. If the voltage in phase
B is lower than the setting, the pickup of the frequency
derivative unit’s pickup is not allowed. When a voltage
higher than the threshold appears, the relay waits 10
cycles before starting to execute the frequency gradient
function.
To activate the fuse failure, this conditions must be kept
during a programmable time (“Additional timing” in console,
“Trip time” in the display (table 0 – protections-fuse failure).
The function is activated until V1 voltage exceeds VFF.
If any function has picked up or during the relay’s waiting
time, any of its protection units picks up, the fuse failure
outputs is not activated because what the relays has
detected is a fault and not a fuse failure situation.
The fuse failure pick up and trip activate if the digital
input “Fuse failure” is activated, independently of the
programmed time. Fuse failure will only deactivate if the
inputs is deactivated.
Fuse failure may be used as a blocking signal for other
functions.
50
V
FF
Being Vr the single rated voltage
[4]
The options in bold correspond to the standard ratings.
⋅:= (V
N
63,5
90
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
4.20. Teleprotection
4.20.1. Operation
Protection functions. Description and settings
It is based upon the use of teleprotection signals between
both end terminals of the line. The eect upon the output
relays’ operation is determined according to the signals
given by the protection along with the signals given by the
other terminals.
In these schemes, the zones 1, 2 and 3 (F, Forward) look
forward and the zone 3R (R, Reverse) looks backwards.
Zone 3 directionality (F) or (R) depends on the setting
“torque control” (enabled or disabled) of the overcurrent
instantaneous function (50), even if the function is enabled
or not. If torque control is set as NO, the direction is forward.
Zone 1 units include the three overcurrent units (timed and
the two instantaneous levels).
There are two basic types of schemes:
1. Locking scheme: The signal received indicates that
the fault falls outside the zone to be protected. An
overreach zone may trip if the lockout signal is not
received after a given waiting period.
4.20.2. Setting range (6 tables)
2. Permission scheme: The signal received gives
permission for an instantaneous trip within the
overreach zone. Additional ECO and reverse direction
blocking can be used.
The following protection schemes may be selected:
1. Permissive overreach
2. Permissive underreach
3. Directional Locking
4. Directional unlocking
Additionally, together with the schemes, the following can
be selected:
1. ECO
2. Inverse direction locking
Setting Min Max Remarks Remarks
Protection scheme
Drop o time for input RTP
Additional lockout time [s]
Guard signal loss time [s]
Enable ECO
Minimum RTP time for ECO [s]
Enable inverse direction lockout
Inverse direction lockout time
Table 4.26. Setting range
0 1 0.01
0 1 0.01
0 0.15 0.01
0 9.99 0.1
0 9.99 0.1
1. Protection scheme: selects the type of scheme.
2. RTP (TRTP) drop time: time during which the
teleprotection reception input (RTP) remains stored.
3. Additional block-out time (TBLQ): waiting time of the
block-out signal.
4. Guard signal loss time (TPSG): waiting time after
receiving the channel loss input.
5. Enabling ECO: enables the ECO function.
6. Minimum RTP time for ECO (TMIN): time during which
the RTP input must be seen so that the ECO signal is
activated.
Permissive overreach
Permissive underreach
Directional Locking
Directional unlocking
YES/NO
YES/NO
7. Enabling of reverse direction block-out: it enables the
storage of the reverse direction.
8. Reverse direction locking time (TZ3(R)MEM): reverse
direction storage time.
The respective settings of teleprotection function and zones
in the console are located in “Overcurrent prot. zones 2&3”,
“Distance protection (trip logic)” and “Protection trip mask”.
These settings are not accessible by keyboard/display.
IG-150-EN version 04; 03/10/16
91

Protection functions. Description and settings General instructions
ekor.rps
4.20.3. Protection trip mask (6 tables)
This setting can only be programmed using a PC, not by
keyboard/display.
There are three types of mask for the protection functions
that may cause “unconditional” “permissive” and “blocked”
trip. This mask is only examined if “enable masks” setting is
set as “YES”. If it is as “NO”, trips are allowed without taking
into account the masks.
Trip causes set as “YES” at “unconditional” mask, gives a trip
after expiring the trip time set, without taking into account
the pilot wire scheme. Unconditional trip output and general
trip output are activated.
Trip causes set as “YES” at “permissive” mask, gives a trip with
acceleration by permissive logic only if permissive logics
(Overreach, underreach or directional unlocking) are selected
in trip logic settings. If a trip with acceleration is given, “pilot
wire scheme trip” output will be activated and not general
trip output.
4.20.4. Used signals
Trip causes set as “YES” at “blocked” mask, give a trip
with acceleration by blocking logic, only if locking logics
(Directional Locking) are selected in trip logic settings. If
a trip with acceleration is given, “Pilot wire scheme trip”
output will be activated and not general trip output.
You can simultaneously select for a function unconditional
and permissive or unconditional and locking, in this way the
trips of the units indicated in the permissive and blocked
mask can be accelerated, if the adequate conditions are
given.
It has to be taken into account that these masks are examined
in the moment of giving the trip command; therefore it has
no eect if the function is disabled by setting. Let’s suppose,
for example that “neutral instantaneous in zones 1, 2 and
3” functions are set as “YES” in unconditional trip mask, but
“neutral instantaneous” is set as “NO” in trip permission after
closing, after second reclosure. During security time after
second reclosure it will not trip by neutral instantaneous,
because this command will not even be executed.
Below the meaning is explained:
ETP: Is called the teleprotection signal sent by a terminal. In
any event, the ETP signal sent by a terminal is kept active for
at least 50 ms, even though the reason that has caused its
activation may disappear.
RTPE y RTP: Both are dierent, and therefore the RTPE is
the input of the teleprotection received by a terminal; while
the RTP follows the RTPE input in order to get activated,
but it keeps the input stored for the TRTP time in order to
be deactivated. If TRTP is adjusted equal to zero, then the
RTP coincides with the RTPE input. In the teleprotection
schemes, RTP is used.
Z3(R)MEM: Locking signal due to reverse direction change.
See the section that corresponds to reverse direction
locking.
Figure 4.24. Teleprotection reception
MINC trip: OR of enabled protection units for unconditional
trips that have trip. These units will trip after the time set,
without taking into account the pilot wire schemes.
MPER pickup: OR of enabled protection units for permissive
trips that have picked up. These units will trip if they have
pickup when the teleprotection signal/RTP MEM) reach
them. If they do not receive permission by this input, they
do not trip.
MBLOQ pickup: OR of enabled protection units for
blocked trips that have picked up. These units will trip, if
they continue in pickup status, after exceeding the locking
signal time (TBLQ) and the signal (RTP) has not arrived. If
they were locked by this input, they would not trip.
92
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Protection functions. Description and settings
Notes
When “Directional Locking” scheme is set or “Inverse
Directional Locking” function is enabled zone 3 must be set
as REVERSE.
Trips, bay pilot wire schemes will reclose depending on the
masks set for external protection
.
main pilot protection schemes
Permissive underreach (PUTT)
Pilot protection signal (ETP) is sent with the activation of
zone 1.
It generates instantaneous pilot protection trip when
receiving the teleprotection signal (RTP) along with the
activation of a unit in zone 1, 2 or 3 (depending on the
settings of trip mask) whenever memorized zone 3 (R)
(Z3(R)MEM) is not activated. The Z3(R)MEM signal can be
eliminated from the logic only by disabling the “Inverse
direction locking” function. In this case the Z3(R)MEM would
be continuously as 0.
The logic diagram of this function is:
Figure 4.25. Permissive underreach
Permissive overreach (POTT)
This scheme uses the teleprotection signal in the
overreach zone 2 (or 1 or 3, depending on the mask) of
the line. Instantaneous trip by teleprotection, when the
teleprotection signal is received along with the activation
of a unit in zone 2, whereas memorized zone 3 (Z3(R)MEM)
The logic diagram of this function is:
is not activated. Z3(R)MEM signal can be eliminated from
the logic disabling “directional unlocking” function. In that
case, Z3(R)MEM would be always at 0.
EPilot protection signal sending with the activation of units
in zone 2, without backwards fault detection Z3(R)MEM.
Figure 4.26. Permissive overreach
IG-150-EN version 04; 03/10/16
93

Protection functions. Description and settings General instructions
ekor.rps
Directional Locking
Pilot protection instantaneous trip with activation of zone 2,
if RTP signal is not received, once the locking time is elapsed
and no fault is seen in zone 3 Z3(R)MEM.
Figure 4.27. Directional Locking
ETP locking signal is sent if the fault is seen backwards Z3(R)
MEM.
The channel stop signal (STOP) is activated if a fault is
detected forwards (Z1, Z2 or Z3) without seeing a fault in
zone 3 Z3(R)MEM.
The logic diagram is shown below:
Directional Unlocking
Pilot protection instantaneous trip with activation of Z2, if
the unlocking signal (RTP) is received or if only the channel
loss signal (RPSG) is received during the guard signal loss
time (TPSG). Since the moment in which the guard channel
loss signal is activated a 150 ms time span is opened during
which the trip can be given if the RPGS signal is activated
during the programmed time (TPSG) without RTP reception.
After these 150 ms the guard channel loss signal will have
no eect over the pilot protection trip. Therefore, it is
indispensable that the time TPSG is programmed to a value
lower than 150 ms so that the loss signal guard activates
the trip. Once the guard signal is recovered 200 ms will be
waited before starting again the aforementioned logic in
case the guard channel is lost again.
The ETP output is the same as in the POTT scheme. The
Z3(R)MEM signal can be eliminated from the logic only by
disabling the “Inverse direction locking” function. In this case
the Z3(R)MEM would be continuously as 0.
94
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Protection functions. Description and settings
Figure 4.28. Directional unlocking
Additional pilot protection schemes
Reverse direction locking
It is used on double-circuit lines in order to prevent the
immediate tripping of a protection that is seeing a fault
backwards (and the carrier signal, which is sent to it by the
forward protection) when the power ow direction changes
(due to opening of the parallel line breaker). It delays the
pilot protection tripping for a few cycles in order to give
the remote terminal time to remove the permission (ETP)
signal after the change of ow direction due to the breaker
opening. The Z3 signal is used with a storage time (Z3(R)
MEM), thereby obtaining the Z3(R)MEM signal to be used
in the rest of the schemes, as shown in the following gure.
The gure shows a ow scheme when the fault occurs and
when the breaker is opened. If this scheme is not used, the
eect could be the following:
When the failure occurs, terminal C sees it in zone 1, D in
zone 1 or 2 according to the length, B backwards and A in
zone 2. In this situation, C opens the breaker and sends the
ETP signal to D. A likewise sends ETP to B.
When the breaker is opened and the ow changes, A would
see the fault backwards and B would see it in zone 2 or 3 (F),
whereby it could trip before A removes the RTP signal.
Figure 4.29. Reverse Directional Locking
Figure 4.30. Flow Change due to breaker opening
IG-150-EN version 04; 03/10/16
95

Protection functions. Description and settings General instructions
ekor.rps
ECO
It is used in the permissive schemes (overreach, underreach
and directional unlocking).
The pilot protection instantaneous trip is the one
corresponding to the selected scheme.
Figure 4.31. ECO logic
The teleprotection signal is sent with either of the following
conditions:
1. According to the selected scheme
2. If the RTP is received and the fault is not detected either
forward or backward.
3. During a minimum programmable time or the breaker
is open. The ECO signal only provides a pulse of 50 ms.
4.21. Thermal image
4.21.1. General description
This function calculates a temperature according to the
recent and present load conditions of the protected unit.
This temperature is visualized in the display in % with
respect to the trip value; when reaching the programmed
value an alarm relay is activated (if there is any programmed)
and when reaching the 100 % the thermal image trip relay
(if the unit is enabled) and the corresponding signaling
are activated. Once the unit has tripped by this unit, the
relay does not dropout while the calculated temperature is
above the 75 % and the rest of the locking conditions are
fullled. The calculated temperature can be reset through
the keyboard/display (accessing through “↓” to TEMP=0?
and pushing “↓” during 2 seconds) or through console
command.
The time to trip is given by the following curves, which give
the time according to the ratio between the current and the
programmed rated current, and the programmed cooling
constant. According to the following formula (starting from
temperature 0):
Being
t: trip time
τ1: cooling constant
I: average current
I0: programmed rated current
Once it has tripped, there is another programmable time
constant for the cooling.
96
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
4.21.2. Settings
Setting Min Max Step Notes
Enable
Heating time constant [min]
Cooling time constant [min]
Threshold alarm [%]
Threshold restore [%]
Rated current [A]
Table 4.27. Settings
4.21.3. Trip times
Protection functions. Description and settings
YES/NO
3 60 1
3 180 1
80 100 1
50 99 1
0.1 200.0 0.01
Figure 4.32. Trip times
IG-150-EN version 04; 03/10/16
97

Protection functions. Description and settings General instructions
ekor.rps
4.21.4. Heating curves
The heating curve is calculated from the following formula:
Being Tf = nal temperature
Ti = initial temperature
t = time
τ1 = Heating time constant
For Ti = 0 the formula is reduced
As in
The heating curve is:
The next gure gives as an example, the heating curves,
with 3 min time constant, for I/I0 = 1 and for I/I0 = 2.
4.21.5. Cooling curves
The cooling curve is calculate from the following:
Being: Tf=nal temperature
Ti=initial temperature
t=time
τ2=cooling time constant
Starting from Ti = 1 (100 in %), tripping temperature, in
order to arrive to a nal temperature of Tf = 0 (that is with
current I = 0), the formulae is reduced to:
Figure 4.33. Heating curves
Example: Cooling curve with 3 min constant.
Figure 4.34. Cooling curves
98
IG-150-EN version 04; 03/10/16

General instructions
ekor.rps
Protection functions. Description and settings
Combined examples cooling and heating:
1. Let’s suppose that during 200 s it is heated with I/I
1, the next 200 s (without tripping) with I/I0 = 2, and
starting from there it goes back indenitely to I/I0 = 1
(both time constants of 3 min):
0
2. Lets suppose that during 200 s it is heated with I/I0 = 0.5,
then with I/I0 = 1.5 until reaching 100 %, where it trips,
=
and starting from there it is cooled with I/I0 = 0 (both
time constants of 3min).
Figure 4.36. Combined examples cooling and heating
Figure 4.35. Combined examples cooling and heating
4.22. Field loss protection
4.22.1. Overview
Field loss protection (generator excitation), with the following
characteristics (function 40):
1. 2 MHO tripping areas with independent settings.
4.22.2. General settings range
Setting Min Max Step Notes
Enable
Minimum voltage pickup
Directional unit angle
Table 4.28. General settings range
The directional unit angle allows to block the protection in
a specic direction.
10.0 65.0 0.1
0 180 1 Clockwise
2. 1 directional unit common to both areas.
3. 1 undervoltage unit common to both areas. Each area
can be enabled independently.
YES/NO
The protection’s impedance value is calculated with the
positive sequence current and voltage.
IG-150-EN version 04; 03/10/16
99

Protection functions. Description and settings General instructions
ekor.rps
4.22.3. MHO area settings range
Setting Min Max Step Notes
Z1A impedance setting (oset) [Ω]
Z1B impedance setting (diameter) [Ω]
Area 1 undervoltage monitoring
Area 1 alarm time setting [s]
Area 1 tripping time setting [s]
Table 4.29. MHO area settings range
The MHO2 area has the same settings range as the MHO1.
Settings Z1A and Z1B delimit the MHO1 tripping area
(settings Z2A and Z2B delimit the MHO2 area). Setting Z1A
represents the oset (in ohms) of the area’s top. This value
can be positive (see Z1A in gure 1) or negative (see Z2A for
the MHO2 area). Setting Z1B represents the diameter of the
MHO1 area.
The protection operates dierently, depending on whether
the area is in undervoltage conditions or not. For one area
to be in undervoltage conditions, one of the following
circumstances must be met:
-20.0 20.0 0.1
0.0 120.0 0.1
YES/NO
0.0 10.0 0.1
0.00 10.00 0.01
Angle
1. That the measurement in any of the voltage phases is
below the undervoltage start value.
2. That the area’s undervoltage monitoring setting is
disabled.
When the generator enters one of the MHO areas a timer
is activated. If the area is not in undervoltage conditions
the area’s alarm timer is activated. However, if the area is
in undervoltage conditions, the tripping activates the
area’s timer. The latest timer must be set to a value below
the other timer’s. The reason for this is that in undervoltage
conditions the fault must be cleared quickly in order to
avoid the electrical system becoming unstable, since the
generator has few possibilities to recover. Once the timer’s
time has elapsed, the corresponding outputs are activated.
Figure 4.37. MHO area settings
Field loss signals:
1. MHO1 alarm
2. MHO2 alarm
3. MHO1 alarm
4. MHO2 alarm
5. MHO1 undervoltage
6. MHO2 undervoltage
The transmitted measurement is as follows:
Byte
Nr.
Table 4.30. transmitted measurement
Format Specication Data
2
Word PROCOME Vr*1.2*20
Impedance
module
It is the voltage (1.2*Vr) dividided by the minimum current.
To make calculations for the impedances, the positive
sequence current must be equal or higher than a minimum
value set to 0.05 A. This way, the maximum impedance
corresponds to the quotient between the maximum voltage
and the minimum current.
100
IG-150-EN version 04; 03/10/16
 Loading...
Loading...