

Page 1
Brushless Motor
BMU
Series
30 W / 60 W / 120 W
OPERATING MANUAL
Thank you for purchasing an Oriental Motor product.
This Operating Manual describes product handling procedures and safety precautions.
•Please read it thoroughly to ensure safe operation.
•Always keep the manual where it is readily available.
HM-5187-4
Page 2
Only qualied personnel should work with the product.
Use the product correctly after thoroughly reading the section "1 Safety precautions." In addition, be
sure to observe the contents described in warning, caution, and note in this manual.
The product described in this manual has been designed and manufactured to be incorporated
in general industrial equipment. Do not use for any other purpose. Oriental Motor Co., Ltd. is not
responsible for any damage caused through failure to observe this warning.
Table of contents
1 Safety precautions ...............................3
2 Precautions for use ..............................5
3 Preparation ..........................................6
3.1 Checking the product .............................. 6
3.2 How to identify the product model ........... 6
3.3 Products possible to combine ................. 7
3.4 Names and functions of parts ................. 7
4 Installation............................................8
4.1 Installation location .................................. 8
4.2 Installing the driver .................................. 8
5 Connection...........................................9
5.1 Connecting the motor and driver ............. 9
*
5.2 Grounding ............................................. 11
5.3 Connecting the power supply ................ 12
5.4 Connecting the I/O signals .................... 13
5.5 Connection diagram .............................. 14
6 Operating ...........................................17
6.1 Operation overview ............................... 17
6.2 Operating by front panel ........................ 17
6.3 Operating by programmable
controller ............................................... 19
7 Convenient functions .........................23
7.1 Functions list ......................................... 23
7.2 Setting items and panel displays ........... 24
7.3 Parameter list ........................................ 26
7.4 Items displayed on the driver ................ 28
7.5 Setting the operation data ..................... 29
7.6 Setting the acceleration time and
deceleration time ................................... 30
7.7 Data locking for the set data ................. 31
7.8 Limiting the setting range of the rotation
speed .................................................... 31
7.9 Holding a load at motor standstill .......... 32
8 Alarms and warnings .........................32
8.1 Alarms ................................................... 32
8.2 Warnings ............................................... 35
9 Troubleshooting and remedial
actions ...............................................36
10 Maintenance and inspection ..............37
10.1 Inspection .............................................. 37
10.2 Warranty ................................................ 37
10.3 Disposal ................................................ 37
11 Accessories (sold separately) ............38
Be sure to ground the protective earth terminal
*
Refer to "5.2 Grounding" for details, and ground securely.
−2−
12 Reference ..........................................39
12.1 Standard and CE Marking ..................... 39
12.2 Installing and wiring in compliance with
EMC Directive ....................................... 40
12.3 Specications ........................................ 42
12.4 Pin assignment ...................................... 43
(ground terminal) to ensure the safe use of the product.
Page 3
1 Safety precautions
Note
The precautions described below are intended to prevent danger or injury to the user and other personnel through safe,
correct use of the product. Use the product only after carefully reading and fully understanding these instructions.
Handling the product without observing the instructions that accompany a “Warning”
symbol may result in serious injury or death.
Handling the product without observing the instructions that accompany a “Caution” symbol
may result in injury or property damage.
The items under this heading contain important handling instructions that the user should
observe to ensure safe use of the product.
General
•Do not use the product in explosive or corrosive environments, in the presence of ammable gases or near
combustibles. Doing so may result in re, electric shock or injury.
•Only qualied and educated personnel should be allowed to perform installation, connection, operation and
inspection/troubleshooting of the product. Handling by unqualied and uneducated personnel may result in re,
electric shock, injury or equipment damage.
•Do not transport, install the product, perform connections or inspections when the power is on. Always turn the
power off before carrying out these operations. Failure to do so may result in electric shock or equipment damage.
•The terminals on the driver marked with
terminals while the power is on. Doing so may result in re or electric shock.
•Do not use a motor in a vertical application. If the driver’s protection function is activated, the motor will stop and
the moving part of the equipment will drop, thereby causing injury or equipment damage.
•If the driver protective function was activated, remove the cause and reset the protective function. Continuing the
operation without removing the cause of the problem may result in malfunction of the motor and driver, leading to
injury or damage to equipment.
symbol indicate the presence of high voltage. Do not touch these
Safety precautions
Installation
•The motor and driver are Class I equipment. When installing the motor and driver, connect their Protective Earth
Terminals. Failure to do so may result in electric shock.
Connection
•Securely connect and ground in accordance with the connection diagram. Failure to do so may result in re or
electric shock.
•Do not forcibly bend, pull or pinch the cables. Doing so may result in re or electric shock.
•Do not machine or modify the motor cable or the connection cable. Doing so may result in electric shock or re.
•Do not apply any excessive force to the motor connector for the connector type. Doing so may result in electric
shock or re.
•Do not remove the connector cap for the connector type until the connection cable is connected so that the O-ring
of the connector connection on the motor is not damaged. Doing so may result in electric shock or re.
•Be sure to observe the specied cable sizes. Use of unspecied cable sizes may result in re.
Operation
•Use a motor, gearhead, and driver only in the specied combination. An incorrect combination may cause in re,
electric shock or equipment damage.
•Keep the input power voltage of the driver within the specied range. Failure to do so may result in re or electric shock.
Maintenance and inspection
•Always turn off the power before performing maintenance/inspection. Failure to do so may result in electric shock.
•Do not touch the motor or driver when conducting insulation resistance measurement or dielectric strength test.
Accidental contact may result in electric shock.
•Do not touch the connection terminals on the driver immediately (within 1 minute) after the power is turned off.
Residual voltage may cause electric shock.
•Regularly check the openings in the driver for accumulated dust. Accumulated dust may cause re.
Repair, disassembly and modication
•Do not disassemble or modify the motor, gearhead, and driver. Doing so may result in electric shock, injury or
equipment damage. Should you require inspection or repair of internal parts, please contact the Oriental Motor
branch or sales ofce from which you purchased the product.
−3−
Page 4
Safety precautions
General
Installation
•Do not use the motor, gearhead, and driver beyond the specications. Doing so may result in re, electric shock,
injury or damage to equipment.
•Do not insert an object into the openings in the driver. Doing so may result in re, electric shock or injury.
•Do not touch the motor, gearhead, or driver while operating or immediately after stopping. The surface of the
motor, gearhead, or driver may be hot, causing a skin burn(s).
•Do not leave anything around the motor and driver that would obstruct ventilation. Doing so may result in damage
to equipment.
•Do not carry the product by holding the output shaft of the motor or the gearhead, as well as any of the cables.
Doing so may result in injury.
•Do not touch the motor output shaft with bare hands. Doing so may result in injury.
•When attaching the motor with the gearhead, exercise caution not to pinch your ngers or other parts of your body
between the motor and gearhead. Injury may result.
•Securely install the motor and gearhead, and the driver to their respective mounting plates. Inappropriate
installation may cause the motor/driver to detach and fall, resulting in injury or equipment damage.
•Provide a cover over the rotating part (output shaft). Failure to do so may result in injury.
•When installing the motor and gearhead in equipment, exercise caution not to pinch your ngers or other parts of
your body between the product and equipment. Injury may result.
•Securely install a load on the output shaft. Inappropriate installation may result in injury.
Connection
•Be sure to ground the motor and driver to prevent them from being damaged by static electricity. Failure to do so
may result in re or damage to equipment.
•For the power supply of I/O signals, use a DC power supply with reinforced insulation on its primary and secondary
sides. Failure to do so may result in electric shock.
Operation
•Provide an emergency stop device or emergency stop circuit external to the equipment so that the entire equipment
will operate safely in the event of a system failure or malfunction. Failure to do so may result in injury.
•Immediately when trouble has occurred, stop running and turn off the driver power. Failure to do so may result in
re, electric shock or injury.
•Do not touch the rotating part (output shaft) when operating the motor. Doing so may result in injury.
•The motor surface temperature may exceed 70 °C (158 °F) even under normal operating conditions.
If the operator is allowed to approach a running motor, attach a warning label as shown in the gure
in a conspicuous position. Failure to do so may result in skin burn(s).
•Use an insulated screwdriver to adjust the acceleration/deceleration time potentiometer in the driver. Failure to do
so may result in electric shock.
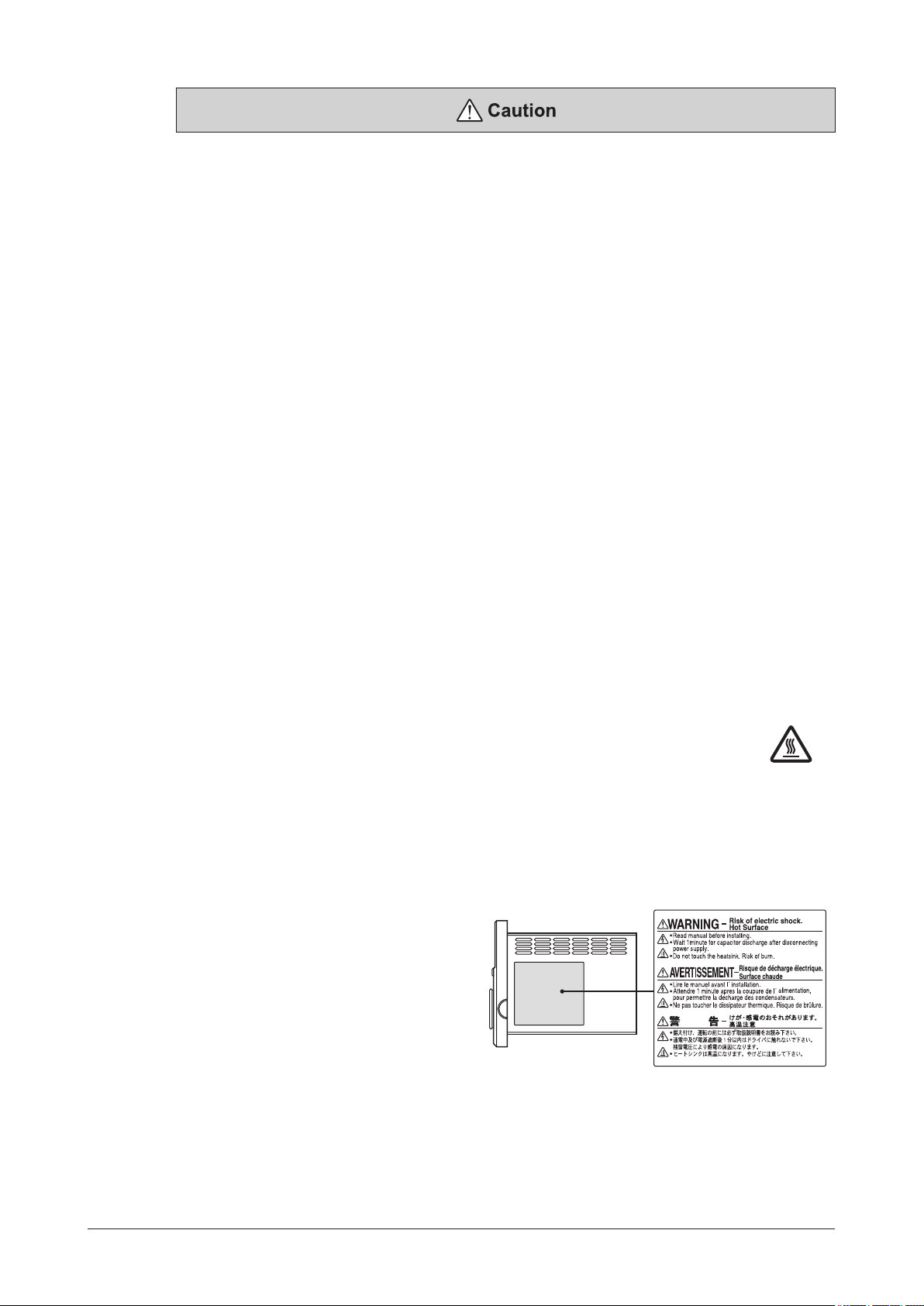
Warning information
A warning label with handling instructions is
attached on the driver. Be sure to observe the
instructions on the label when handling the driver.
Warning label
−4−
Driver side face
Page 5
2 Precautions for use
This chapter covers limitations and requirements the user should consider when using the product.
Be sure to match the motor output power with the driver output power.
Connect protective devices to the power line
z
Connect a circuit breaker or earth leakage breaker to the driver’s power line to protect the primary circuit. If an
earth leakage breaker is to be installed, use one incorporating high-frequency noise elimination measures. Refer to
"Preventing leakage current" below for the selection of protective devices.
Do not perform vertical drive (gravitational operation)
z
The product will not be able to control the motor speed if an operation that the motor output shaft is externally rotated
is performed (vertical drive etc.). Also, if vertical drive is performed, since the inverter primary voltage of the circuit
may exceed the permissible range, the protective function may be activated. As a result, the motor may coast to a stop
and the load may fall.
Do not use a solid-state relay (SSR) to turn on/off the power
z
A circuit that turns on/off the power via a solid-state relay (SSR) may damage the motor and driver.
Do not conduct the insulation resistance measurement or dielectric strength test with the motor
z
and driver connected
Conducting the insulation resistance measurement or dielectric strength test with the motor and driver connected may
result in damage to the product.
Grease measures
z
On rare occasions, grease may ooze out from the gearhead. If there is concern over possible environmental damage
resulting from the leakage of grease, check for grease stains during regular inspections. Alternatively, install an
oil pan or other device to prevent leakage from causing further damage. Oil leakage may lead to problems in the
customer’s equipment or products.
Caution when using under low temperature environment
z
When an ambient temperature is low, since the load torque may increase by the oil seal or viscosity increment of
grease used in the gearhead, the output torque may decrease or an overload alarm may generate. However, as time
passes, the oil seal or grease is warmed up, and the motor can be driven without generating an overload alarm.
Preventing leakage current
z
Stray capacitance exists between the driver’s current-carrying line and other current-carrying lines, the earth and the
motor, respectively. A high-frequency current may leak out through such capacitance, having a detrimental effect on
the surrounding equipment. The actual leakage current depends on the driver’s switching frequency, the length of
wiring between the driver and motor, and so on. When connecting an earth leakage breaker, use one of the following
products offering resistance against high frequency current:
[ Mitsubishi Electric Corporation: NV series ]
Noise elimination measures
z
Provide noise elimination measures to prevent a motor or driver malfunction caused by external noise. For more
effective elimination of noise, use a shielded I/O signal cable or attach ferrite cores if a non-shielded cable is used.
Refer to p.40 for the noise elimination measures.
Connecting the motor and driver
z
Be sure to connect the connector type motor and the driver using the dedicated connection cable (sold separately).
The maximum distance between the motor and driver is 10.5 m (34.4 ft.), and the connection cables are provided up
to 10 m (32.8 ft.). Limit the number of times so that attaching/detaching between the connection cable and the motor
or driver will not exceed 100 times.
Connection cable
z
Do not apply a strong force on the locking lever of the connector for motor connection.
Applying a strong force on the locking lever may cause damage.
The driver uses semiconductor elements, so be extremely careful when handling them
z
Electrostatic discharge can damage the driver.
Be sure to ground the motor and driver to prevent them from being damaged by electric shock or static electricity.
Saving data to the non-volatile memory
z
The display blinks while pressing the setting dial to set the data or initializing the data (about 5 seconds). Do not turn
off the power supply while the display is blinking. Doing so may abort writing the data and cause an EEPROM error
alarm to generate. The non-volatile memory can be rewritten approximately 100,000 times.
Precautions for use
−5−
Page 6

Preparation
BMUD 60 - C 2
Parallel shaft gearhead GFV gearhead
3 Preparation
3.1 Checking the product
Verify that the items listed below are included.
Report any missing or damaged items to the branch or sales ofce from which you purchased the product.
□
Driver ..............................................................1 unit
□
CN1 connector (3 pins) ................................1 pc
□
CN4 connector (9 pins) ................................1 pc
□
OPERATING MANUAL(this document) .....1 copy
□
QUICK START GUIDE ....................................1 copy
3.2 How to identify the product model
Driver
䐟 䐠 䐡 䐢
Driver type
①
Output power
②
Power supply voltage
③
Reference number
④
Motor
Round shaft
BLM 4 60 S H P - 5 A S
䐟 䐠 䐡 䐢 䐣 䐤 䐨 䐩 䐪
Right angle Hollow shaft Hypoid gear JH gearhead
BLM 4 60 S H P K - 4 H 10 S
䐟 䐠 䐡 䐣䐢 䐤 䐥 䐦 䐧 䐨
Motor type
①
Frame size
②
Output power
③
Motor classication
④
Motor connection method
⑤
Degree of protection for motorP: IP66 Blank: IP40
⑥
Combined motor
⑦
Frame size of combined motor4: 80 mm (3.15 in.) 5: 90 mm (3.54 in.)
⑧
Gearhead type
⑨
Gear ratio • Motor shaft type
⑩
Gearhead shaft type Blank: mm shaft type A: Inch shaft type
⑪
Material of output shaft
⑫
•A code is added to the end of the model name for the product that the motor connector position has been changed.
BMUD: BMU
30
: 30 W 60: 60 W
A
: Single-phase 100-120 V
C
: Single-phase, Three-phase 200-240 V
series driver
120
: 120 W
䐪
BLM
: Brushless Motor
2
: 60 mm (2.36 in.) 4: 80 mm (3.15 in.) 5: 90 mm (3.54 in.)
30
: 30 W 60: 60 W
S
H
: Connector type Blank: Cable type
K
: Round shaft type (with key)
H: JH
gearhead
Number: Gear ratio of gearhead
A
: Round shaft type
AC
: Round shaft type (Shaft at)
C, S
: Stainless steel A, B: Carbon steel
120
: 120 W
−6−
Page 7
3.3 Products possible to combine
Protective lm
Mounting hole
eleration/deceleration
Protective lm
Products with which drivers can be combined are listed below.
Verify the driver model and the motor model against the model name described on the package label.
For details about the motor, refer to the operating manual supplied with the motor.
Preparation
Output power Power supply voltage Driver model Motor model
30 W
Single-phase 100-120 V
Single-phase, Three-phase 200-240 V
Single-phase 100-120 V
60 W
Single-phase, Three-phase 200-240 V
120 W
in the motor model name indicates a code or a number representing the gear ratio, the shaft shape, or the gearhead type.
o
*
Single-phase 100-120 V
Single-phase, Three-phase 200-240 V
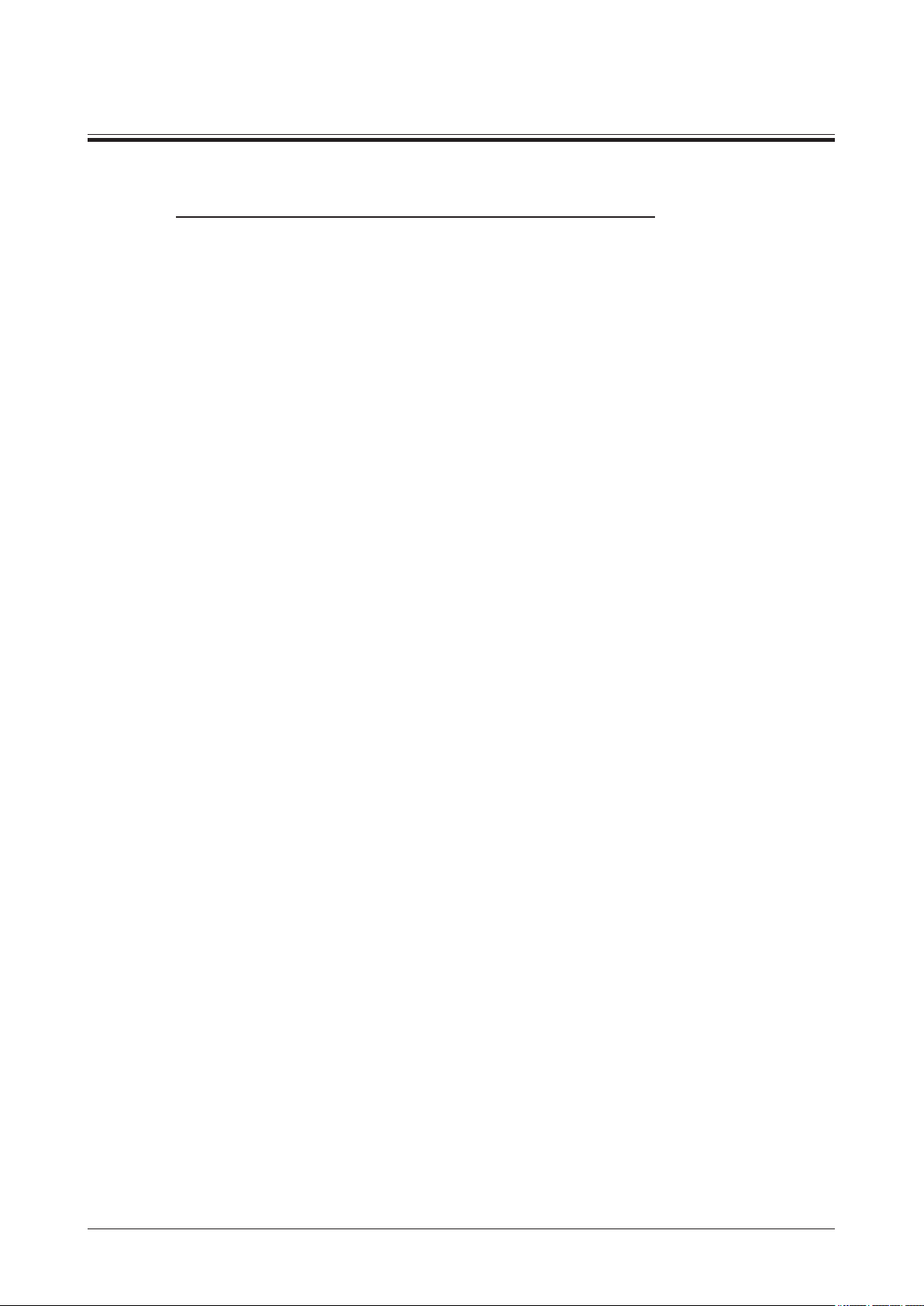
3.4 Names and functions of parts
Front side
Operation switch
Setting dial
When the front panel is attached
Display
Use after removing
the protective lm.
Rotation direction
switch
Front panel
BMUD30-A2
BMUD30-C2
BMUD60-A2
BMUD60-C2
BMUD120-A2
BMUD120-C2
Rear side
Sensor connector
(CN3)
I/O signals
connector
(CN4㻕
BLM230-
BLM260BLM460S-
oo
oo
oo
BLM460SHPK-
BLM5120-
oo
BLM5120HPK-
*
,
BLM230HP-
,
BLM260HP-
,
BLM460SHP-
oooo
,
BLM5120HP-
oooo
Protective
Earth Terminal
Motor connector
(CN2)
Main power supply
connector (CN1)
Protective
Earth Terminal
oo
oo
oo
oo
Display
Operation switch
Setting dial
Rotation direction
switch
Front side
(2 locations)
MODE key
This display shows the monitor item, alarms,
etc.
Setting the operation switch to the "RUN" side
causes the motor to start running.
Setting the operation switch to the "STAND-BY"
side causes the motor to stop.
This setting dial is used to change the rotation
speed or parameters.
After changing, the new value is determined
by pressing the setting dial.
This switch is used to change the motor
rotation direction.
When the front panel is removed
Use after removing
the protective lm.
FUNCTION key
Acc
time potentiometer
Sensor connector
(CN3)
I/O signals connector
(CN4)
Motor connector
(CN2)
Main power supply
connector (CN1)
Protective Earth
Terminal
Removing and installing the front panel
Installing
Install the front panel after
placing on the upper side of
the driver front face.
Removing
Remove the front panel
having the under side.
Connects the sensor connector (black) of the
motor cable or the connection cable.
Connects the I/O signals.
Connects the power connector (white) of the
motor cable or the connection cable.
Connects the main power supply.
Connects the ground terminal* of the
connection cable and the grounding wire.
Be sure to ground the driver using either of
the Protective Earth Terminals.
Connector type only
*
MODE key
FUNCTION key
This key is used to change the operation
mode.
This key is used to change the display of
the operation mode or the function.
Acceleration/deceleration
time potentiometer
Mounting hole
(2 locations)
This potentiometer is used to set the
acceleration/deceleration time.
Installs the driver with screws
(M4 or No.8-32UNC).
−7−
Page 8
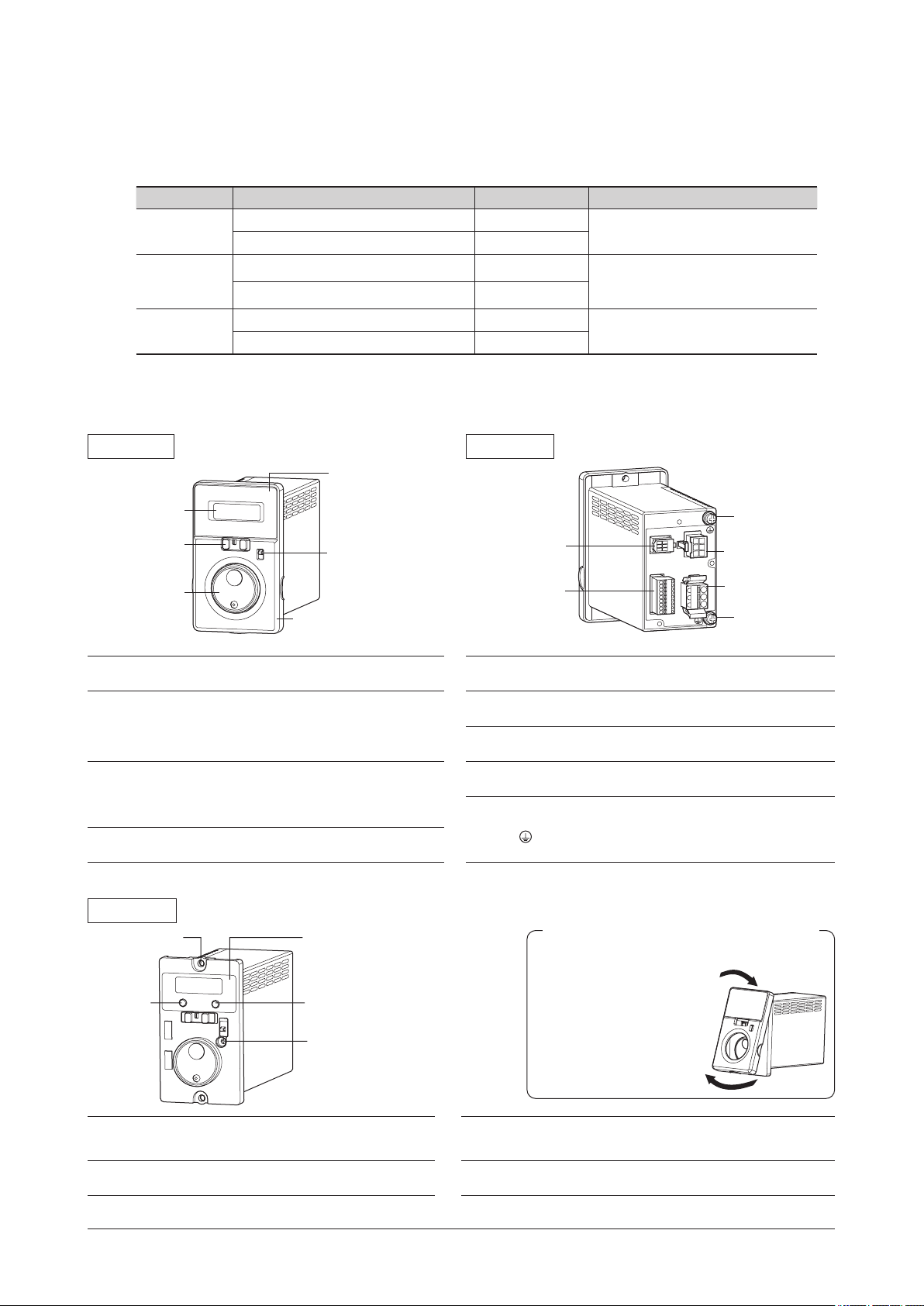
Installation
4 Installation
This chapter explains the installation location and installation methods of the driver.
4.1 Installation location
Install the driver in a well-ventilated place where they can be inspected easily and the following conditions are satised:
•Indoors
•Operating ambient temperature:
0 to +40 °C (+32 to +104 °F) (non-freezing)
•Operating ambient humidity:
85% or less (non-condensing)
•Area that is free of explosive atmosphere or toxic gas
(such as sulfuric gas) or liquid
•Area not exposed to direct sun
4.2 Installing the driver
Check on the Oriental Motor Website for the product dimension.
The driver is designed so that heat is dissipated via air convection and conduction through the enclosure.
There must be a clearance of at least 25 mm (0.98 in.) and 50 mm (1.97 in.) clearances in the horizontal and vertical
directions, respectively, between the driver and enclosure or other equipment within the enclosure.
Installation direction
When installing the driver, mount it turning the driver front panel to the front side or upper side.
•Area free of excessive amount of dust, iron particles or the like
•Area not subject to splashing water (rain, water droplets), oil
(oil droplets) or other liquids
•Area free of excessive salt
•Area not subject to continuous vibration or excessive shocks
•Area free of excessive electromagnetic noise (from welders,
power machinery, etc.)
•Area free of radioactive materials, magnetic elds or vacuum
•Altitude Up to 1000 m (3300 ft.) above sea level
When turning the driver front panel to the upper sideWhen turning the driver front panel to the front side
25 (0.98)
or more
25 (0.98)
or more
25 (0.98)
25 (0.98)
or more
25 (0.98)
or more
or more
25 (0.98)
or more
25 (0.98)
or more
Note •Do not install any equipment that generates a large amount of heat or noise near the driver.
•If the ambient temperature of the driver exceeds the upper limit of the operating ambient temperature, revise
the ventilation condition or forcibly cool the area around the driver using a fan in order to keep within the
operating ambient temperature.
Installation method
Install the driver to a at metal plate offering excellent vibration resistance.
Remove the front panel of the driver and secure the two mounting holes using pan head machine screws and nuts
(M4 or No.8-32UNC: not supplied). Tighten the screws until no gaps remain between the driver and mounting plate.
Removing and installing the front panel → p.7
Washer
Nut
• Plate cutout for mounting
25 (0.98)
or more
2×Ø4.5 (Ø0.177)
25 (0.98)
or more
)
+ 0.04
0
(3.19
+ 1
0
81
90±0.2 (3.54±0.008)
−8−
Pan head machine screw (M4 or No.8-32UNC: not supplied)
Tightening torque: 0.4 to 0.7 N·m (3.5 to 6.1 lb-in)
53
(2.09
0
)
0
[Unit: mm (in.)]
+ 1
+ 0.04
Note •The space between the mounting hole section and front panel of the driver is 4.5 mm (0.18 in.).
Therefore, the total height of the screw head and washer should be less than 4.5 mm (0.18 in.).
The front panel cannot be installed if it is exceeded 4.5 mm (0.18 in.).
•If the washer is used, use the washer which outer diameter is 8 mm (0.31 in.) or less.
Page 9
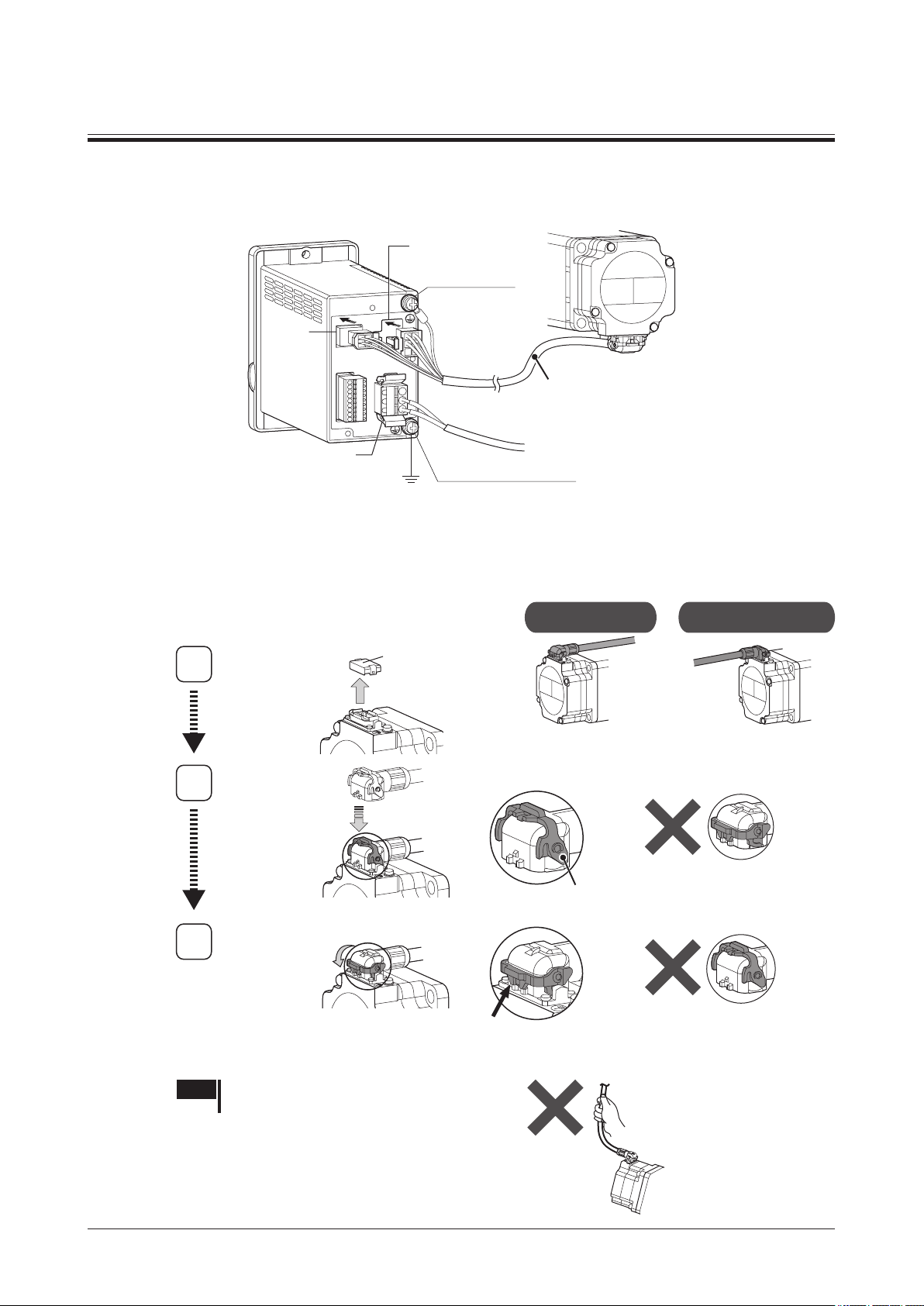
5 Connection
1
Connector cap
[ Cable leading direction ]
5.1 Connecting the motor and driver
There are the connector type motor and the cable type motor.
Connector type
CN2
Protective Earth
Terminal
CN3
Connection
Connection cable
(sold separately)
CN1
Grounding
Connect the motor connector (white) of the connection cable to the CN2, and the sensor connector (black) to the CN3
on the driver.
Connection procedures of the motor and connection cable
z
Connect the dedicated connection cable (sold separately)
to the motor and driver.
The connection cables are provided up to 10 m (32.8 ft.).
Protective Earth Terminal
Be sure to ground.
To power supply⇒ p.12
Leading in direction
of output shaft
Leading in opposite
direction of output shaft
Remove
Attach
2
Position of lever
Locking lever
The connector cannot be
inserted if the locking lever is
turned down.
Secure
3
Be sure to turn down
the locking lever till the
position shown in the gure.
Note Do not carry the motor by holding the cable.
Doing so may cause damage to the product.
The connector cannot be
secured unless the locking
lever is turned down.
−9−
Page 10
Connection
10.5 m (34.4 ft.)
Detaching the connection cable
z
If the locking lever is turned up, the cable can be detached.
Extension between motor and driver
z
Use a connection cable (accessory) for relay when extending the wiring distance between the motor and driver.
The connection cable for relay can be used by connecting up to 2 pieces. The wiring distance between the motor and
driver can be extended to a maximum of 10.5 m (34.4 ft.).
Refer to p.38 for the connection cable for relay.
Example of use: Example of extension by adding two connection cables [10.5 m (34.4 ft.)]
0.5 m (1.6 ft.) 7 m (23.0 ft.)
Connection cable
Grounding
Be sure to ground.
Note
•Secure each connectors part not to apply stress on the connectors part. If not secured, the
CC005HBLB
Be sure to insulate the
terminal not in use.
Flexible connection cable
CC07BL2R
Connecting for relay
3 m (9.8 ft.)
Connection cable
CC03BL2
Grounding
Be sure to ground.
cables may damage by the stress.
•Securely insert the connector straight. Insecure connections may
cause malfunction or damage to the motor or driver.
Cable type
CN2
Protective Earth
Terminal
CN3
Motor cable
[0.5 m (1.6 ft.)]
Grounding
Protective Earth
Terminal
Be sure to ground.
−10−
CN1
Grounding
Protective Earth Terminal
Be sure to ground.
To power supply⇒ p.12
Connect the motor connector (white) of the motor cable to the CN2, and the sensor connector (black) to the CN3 on
the driver.
Use a connection cable (accessory) for relay when extending the wiring distance between the motor and driver.
The connection cable for relay can be used by connecting up to 2 pieces. The wiring distance between the motor and
the driver can be extended up to 10.5 m [34.4 ft.] (including the motor cable).
Refer to p.38 for the connection cable for relay.
Note
•Secure each connectors part not to apply stress on the connectors part. If not secured, the
cables may damage by the stress.
•Securely insert the connector straight. Insecure connections may
cause malfunction or damage to the motor or driver.
Page 11
5.2 Grounding
[Unit: mm (in.)]
Note Be sure to ground the motor and driver. Failure to do so may result in electric shock or damage to
the product. Static electricity may cause damage to the product if the Protective Earth Terminals
are not grounded.
Connector type
Ground using the Protective Earth Terminals of
the motor and driver, as well as the ground terminal
of the connection cable.
Connect the ground terminal of the connection cable
to the driver as shown in the gure.
However, the grounding resistance value provided
in the standards that is applied to the equipment may
not be satised depending on the type or length of
the connection cable.
In this case, ground near the motor using the
Protective Earth Terminal
If the ground terminal of the connection cable is not
used, be sure to insulate.
For the driver, ground near the driver using the
Protective Earth Terminal
Do not share the Protective Earth Terminal with a
welder or any other power equipment.
on the motor.
.
Protective Earth Terminal
Protective Earth
Terminal
Be sure to ground.
Reference
Protective earth wire of the connection cable
Conductor size: AWG18 (0.75 mm
Maximum conductor resistance: 25.0 Ω/km
Grounding
2
)
Connection
Cable type
Be sure to ground using the Protective Earth Terminal
of the motor and the Protective Earth Terminal
of the driver.
Two Protective Earth Terminals
the driver. Ground either of the two Protective Earth
Terminals near the driver. You can ground either of
the two Protective Earth Terminals
that is not grounded is used as a service terminal. Use
the service terminal according to your specic need,
such as connecting it to the motor in order to ground
the motor. Do not share the Protective Earth Terminal
with a welder or any other power equipment.
Connecting to Protective Earth Terminal
To connect to the Protective Earth Terminal, ground using the following grounding terminal. Ground as a short
distance as possible.
are provided on
. The terminal
Grounding
Protective Earth
Terminal
Be sure to ground.
Protective Earth Terminal
Be sure to ground either of
the Protective Earth Terminals.
Ground terminal
•Applicable crimp terminal: Round crimp terminal with insulation cover
•Thread size of terminal: M4
•Tightening torque: 1.2 N·m (10.6 lb-in)
•Applicable lead wire: AWG18 to 14 (0.75 to 2.0 mm
2
)
Ø4.1 (0.16) or more
Grounding
4.8 (0.19) or less
Precautions about static electricity
Static electricity may cause the driver to malfunction or suffer damaged.
Be sure to ground the motor and driver to prevent them from being damaged by static electricity.
−11−
Page 12
Connection
• Single-phase 100-120 V • Single-phase 200-240 V • Three-phase 200-240 V
Screwdriver
10 mm
5.3 Connecting the power supply
Connect the power supply cable to the CN1 on the driver.
Note Check the specication of the power supply voltage for the driver before applying a voltage.
If a voltage exceeding the rated range is applied, the driver may be damaged.
Input power supply Connecting method
Single-phase 100-120 V
Single-phase 200-240 V
Three-phase 200-240 V Connect the R, S and T phase lines to the L1, L2 and L3 terminals, respectively.
Connector model: FKC2,5/3-ST-5,08-RF (PHOENIX CONTACT GmbH & Co. KG)
The same driver can be used for single-phase 200-240 V and three-phase 200-240 V.
Connecting terminals vary depending on the power supply voltage used.
Connect the live side to terminal L, and the neutral side to terminal N.
Connecting method
The power supply cable is not included.
Power supply cables crimped terminals in advance are provided as
accessories (sold separately).
Insert the lead wire while pushing the button of the orange color with a screwdriver.
•Lead wire size: AWG18 to 14 (0.75 to 2.0 mm2)
•Length of the insulation cover which can be peeled:
10 mm (0.39 in.)
•Conductive material: Use only copper wire.
(0.39 in.)
Button of the
orange color
Lead wire
Wire the lead wire so that
the tip part (copper wires)
does not become loose.
Crimp terminals can also be used to connect.
If crimp terminals are used, select the following terminals.
Manufacturer: PHOENIX CONTACT GmbH & Co. KG
Model: AI 0,75-10 [ Conductor cross-sectional area: 0.65 to 0.82 mm
AI 1-10 [ Conductor cross-sectional area: 0.82 to 1.2 mm
AI 1,5-10 [ Conductor cross-sectional area: 1.25 to 1.8 mm
AI 2,5-10 [ Conductor cross-sectional area: 2.0 to 3.0 mm
2
(AWG18) ]
2
(AWG18) ]
2
(AWG16) ]
2
(AWG14) ]
Note •When cycling the power or plugging/unplugging the connector, turn off the power and wait for 1 minute
or more before doing so.
•Ensure that the connector plugged in securely. Insecure connections may cause malfunction or
damage to the product.
•Insert the lead wire to the connector so that the tip part
(copper wires after stripping the insulation cover) does
not become loose. The loose tip part (copper wires)
may cause short-circuiting, leading to damage to the
product.
Circuit breaker
Be sure to connect a circuit breaker to the power line of the driver to protect the primary circuit.
−12−
Rated current of protective device: Single-phase input 10 A, three-phase input 5 A
Circuit breaker: Mitsubishi Electric Corporation NF30
Page 13
5.4 Connecting the I/O signals
+5 V
Pin No.
External control
Connect the I/O signals to CN4 on the driver. Refer to p.16 for connection examples with a programmable controller.
Connecting the lead wire
•Applicable lead wire: AWG26 to 20 (0.14 to 0.5 mm2)
•Length of the insulation cover which can be peeled: 8 mm (0.31 in.)
Crimp terminals can also be used to connect. If crimp terminals are used, select the following terminals.
Manufacturer: PHOENIX CONTACT GmbH & Co. KG
Model: A 0,25-7 [ Conductor cross-sectional area: 0.14 to 0.34 mm
A 0,34-7 [ Conductor cross-sectional area: 0.14 to 0.34 mm
A 0,5-8 [ Conductor cross-sectional area: 0.40 to 0.65 mm
Connector model: FK-MC0,5/9-ST-2,5 (PHOENIX CONTACT GmbH & Co. KG)
CN4 pin assignment
Pin No. Terminal Function
9 C0
8 X0 [FWD]
7 X1 [REV]
6 X2 [M0] This signal is used to select the operation data.
5 C1
4 Y0+
3 Y0−
2 Y1+
1 Y1−
The signal in brackets [ ] is a function that is assigned at the time of shipment. The assigned functions can be changed by setting
*
parameters. Refer to p.27 for details.
Input signal common
(For external power supply)
(For internal power supply)
[SPEED-OUT]
[ALARM-OUT1]
*
0 V
2
(AWG24) ]
2
(AWG22) ]
2
(AWG20) ]
Description
Connect when using the external power supply.
The motor rotates in the forward direction while this
signal is being "ON."
The motor rotates in the reverse direction while this
signal is being "ON."
Connect when using the built-in power supply.
30 pulses are output with each revolution of the motor
output shaft.
This signal turns OFF when an alarm generates
(normally closed).
Connection
Input signal circuit
All input signals of the driver are photocoupler inputs. Use these signals by the
internal power supply (+5 VDC) or external power supply.
When using the external power supply, both sink input logic and source input
logic can be used by changing the wiring.
Usable external power supply: 24 VDC −15% to +20%, 100 mA or more
Output signal circuit
Pin No.
9
6䡚8
5
The driver outputs signals are photocoupler/open-collector output.
When driving each element using the output signal circuit, give consideration to this ON voltage.
ON voltage: 1.5 VDC maximum
External power supply: 4.5 to 30 VDC, 100 mA or less
(5 mA or more for the SPEED-OUT output)
2䚸4
1䚸3
Note When connecting a relay (inductive load), etc., to detect alarm
outputs, use a relay with built-in ywheel diode, or provide a
y-back voltage control measure based on diode, etc., for the
inductive load.
CN4
Pin No.2, 4
Using a external control equipment with a built-in clamp diode
If a external control equipment with a built-in clamp diode is used, a
leakage path may form and cause the motor to operate even when the
external control equipment power is off, as long as the driver power is
equipment
VCC
on. Since the power capacity of the controller is different from that of
the driver, the motor may operate when the external control equipment
and driver powers are turned on or off simultaneously.
When powering down, turn off the driver power rst, followed by the
external control equipment power. When powering up, turn on the
external control equipment power rst, followed by the driver power.
0 V
5 kΩ
680 Ω
0 V
820 Ω
Photocoupler
Inductive load
Flywheel
diode
Driver
+5 V
CN4
6 to 8
5
0 V
−13−
Page 14
Connection
Driver
Driver
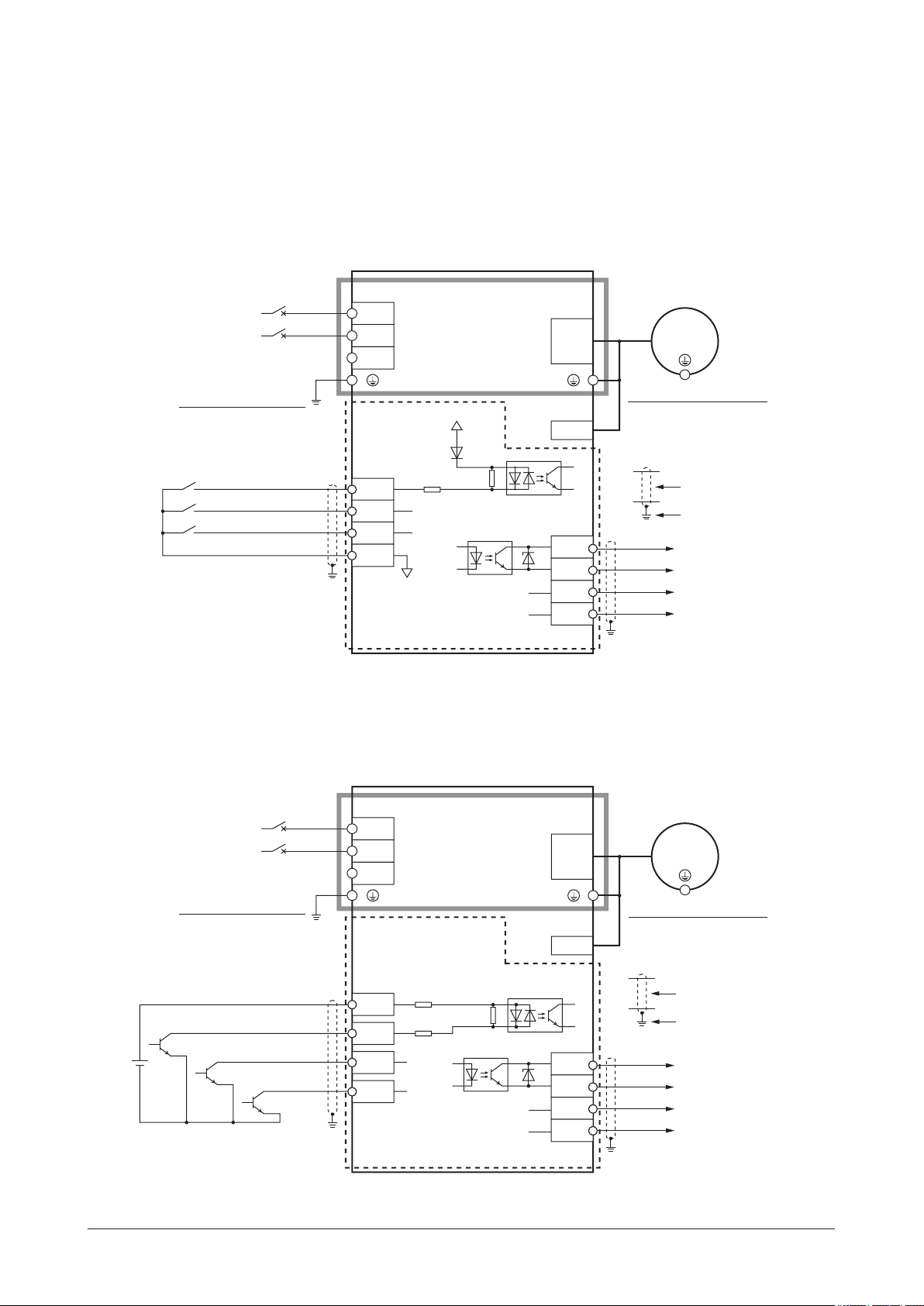
5.5 Connection diagram
The connection example is of the single-phase input. The power supply connection for the three-phase input is different.
(5.3 Connecting the power supply ⇒ p.12)
Sink logic
When using the built-in power supply
z
This is a connection example for when the built-in power supply is used for input signals.
The I/O signal in the brackets [ ] is the assignment at the time of shipment.
CN1
L
N
NC
Power supply
connection
Circuit breaker
L
N
Grounding the driver
Be sure to ground.
X0䠷FWD䠹
X1䠷REV䠹
X2䠷M0䠹
C1䠄0 V䠅
Be sure to ground. Refer to "5.2 Grounding" on p.11 for grounding.
*
When using the external power supply
z
Control circuit
CN4
8
7
6
5
Main circuit
820 Ω
680 Ω
0 V
Motor connector
+5 V
CN2
Sensor
connector
CN3
Motor connection
4
3
2
1
Y0+
Y0−
Y1+
Y1−
This is a connection example for when the external power supply is used for input signals.
The I/O signal in the brackets [ ] is the assignment at the time of shipment.
Motor
Grounding the motor ∗
Be sure to ground.
Shielded cable
Grounding
䠷SPEED-OUT䠹
䠷ALARM-OUT1䠹
Refer to the p.16 for
connection of output signals.
−14−
Power supply
connection
Grounding the driver
Circuit breaker
L
N
CN1
L
N
NC
Main circuit
Be sure to ground.
Control circuit
Connecting input signals
20.4䡚28.8 VDC
100 mA or more
Be sure to ground. Refer to "5.2 Grounding" on p.11 for grounding.
*
C0
X0䠷FWD䠹
X1䠷REV䠹
X2䠷M0䠹
CN4
9
8
7
6
5 kΩ
680 Ω
820 Ω
Motor coannector
CN2
Sensor
connector
CN3
4
3
2
1
Motor conanection
Motor
Grounding the motor ∗
Be sure to ground.
Shielded cable
Grounding
Y0+
Y0−
Y1+
Y1−
䠷SPEED-OUT䠹
䠷ALARM-OUT1䠹
Refer to the p.16 for
connection of output signals.
Page 15

Source logic
Driver
When using the external power supply
z
This is a connection example for when the external power supply is used for input signals.
The I/O signal in the brackets [ ] is the assignment at the time of shipment.
Connection
Power supply
connection
Circuit breaker
L
N
CN1
L
N
NC
Main circuit
Grounding the driver
Be sure to ground.
Control circuit
Connecting input signals
20.4䡚28.8 VDC
100 mA or more
CN4
X0䠷FWD䠹
X1䠷REV䠹
X2䠷M0䠹
C0
Be sure to ground. Refer to "5.2 Grounding" on p.11 for grounding.
*
680 Ω
8
7
6
9
5 kΩ
Motor coannector
820 Ω
CN2
Sensor
connector
CN3
Motor conanection
Motor
Grounding the motor ∗
Be sure to ground.
Shielded cable
Grounding
4
3
2
1
Y0+
Y0−
Y1+
Y1−
䠷SPEED-OUT䠹
䠷ALARM-OUT1䠹
Refer to the p.16 for
connection of output signals.
−15−
Page 16

Connection
Programmable controller
Driver
Programmable controller Driver
Connection example for I/O signals and programmable controller
This is a connection example when the motor is operated using a transistor output type programmable controller.
Sink logic
24 VDC
0 V
to 30 VDC
4.5
R∗
100 mA or less →
R∗
100 mA or less →
0 V
∗ Recommended resistance value for when the limiting resistor R is connected
In the case of 24 VDC: 680 Ω to 2.7 kΩ (2 W)
In the case of 5 VDC:150 Ω to 560 Ω (0.5 W)
C0
X0
X1
X2
C1
Y0+
Y0
Y1+
Y1
CN4
9
8
7
6
5
4
3
2
1
5 kΩ
680 Ω
5 kΩ
680 Ω
5 kΩ
680 Ω
Do not connect anything.
820 Ω
820 Ω
820 Ω
Source logic
24 VDC
0 V
4.5
to 30 VDC
0 V
∗
Recommended resistance value for when the limiting resistor R is connected
In the case of 24 VDC: 680 Ω to 2.7 kΩ (2 W)
In the case of 5 VDC:150 Ω to 560 Ω (0.5 W)
100 mA or less →
R∗
100 mA or less →
R∗
Note •Use a power supply of 20.4 VDC to 28.8 VDC, 100 mA or more, for connecting input signals.
•Turn on the external power supply before turning on the main power supply of the driver.
•For the Y0 and Y1, be sure to keep the current value at 100 mA or less. If the current exceeds
this value, connect the limiting resistor R.
•Do not connect anything to the pin No.5 when the external power supply is used.
C0
X0
X1
X2
C1
Y0+
Y0
Y1+
Y1
CN4
9
8
7
6
5
4
3
2
1
5 kΩ
680 Ω
5 kΩ
680 Ω
5 kΩ
680 Ω
Do not connect anything.
820 Ω
820 Ω
820 Ω
−16−
Page 17

6 Operating
6.1 Operation overview
Operating
Operating by front panel
The motor can be operated and stopped
with the operation switch on the front panel.
Driver
Motor
Operation
switch
Connection: p.17 Operation: p.18
6.2 Operating by front panel
This section explains how to operate the product with ease at the factory setting when receiving the product.
Connecting
The gure shows an example of the connector type. Refer to p.10 for the cable type.
Operating by programmable controller
The motor can be operated and stopped using
external signals.
Motor
Connection: p.14, 16 Operation: p.19
Setting the parameter: p.24 Operating with multiple speeds: p.21
Set the "operation switch" on the front panel to the RUN side even
when operating with the external signals.
Driver
Programmable
controller, etc.
CN2
Protective
Earth Terminal
CN3
Connection cable
(sold separately)
CN1
Protective Earth Terminal
Be sure to ground.
(5.2 Grounding on p.11)
Grounding
To power supply
Connect the AC power supply to the CN1 according to
the input voltage.
Connecting the power supply: p.12
−17−
Page 18

Operating
Display is lit
Inputting the power
Indication: Rotation speed
When inputting the power, if the operation switch is set to the RUN side,
Note
the alarm code "
and the operation cannot be executed.
Set the operation switch to the STAND-BY side and turn on the power.
Refer to p.33 for "prevention of operation at power-on" (alarm code: AL46).
*
Operating
After turning on the power, operate the product as follows.
" (prevention of operation at power-on) is displayed,
AL46
Operation switch
To start running the
±
motor
Setting the operation switch to the
RUN side causes the motor to start
rotating.
To adjust the motor
²
rotation speed
When turning the setting dial to the right
slowly, the rotation speed accelerates by
1 r/min increments. When turning the
setting dial to the left slowly, the rotation
speed decelerates by 1 r/min increments.
When turning the setting dial quickly, the
amount of the rotation speed change increases.
Setting the operation switch again to the RUN side causes the motor to start rotating at the set rotation speed.
When the display is blinking, the rotation speed has not set yet. Determine it by pressing the setting dial.
*
(The set data is saved in the operation data No.0. Refer to p.24 for details.)
Operating with the setting dial can be limited by the lock function so that the set rotation speed cannot be changed.
Refer to the p.31 "7.7 Data locking for the set data." for details.
To decelerate and
´
stop the motor
Setting the operation switch to the
STAND-BY side causes the motor to
decelerate to a stop.
To determine the
³
setting of the motor
rotation speed
Set
When pressing the setting dial, the
rotation speed is determined.
Confirmation
If the setting dial is pressed while the
motor stops, the set speed is displayed
blinking (several times).
∗
−18−
Changing the rotation direction
Change the rotation direction of the motor and gearhead using
the rotation direction switch. The rotation direction can be
changed while operating.
In the case of the gearhead output shaft, the rotation direction
varies depending on the gear ratio of the gearhead.
Check the operating manual supplied with the motor for the
rotation direction of the gearhead output shaft.
For switching the display or setting, refer to p.23 "7 Convenient functions."
Rotation direction
switch
Page 19

6.3 Operating by programmable controller
The motor can be operated and stopped externally.
AC power
supply
Motor Driver
When the motor is operated and stopped externally, the "external operation signal input" parameter
(
oEn
Operating
After connecting the operation input signals (FWD input, REV input) to the CN4, set and operate
the product as follows.
Connection: p.12
) is required to change.
Operation
Operating
Programmable
controller
Power ON
1
[ Connecting to the CN4 ]
• When using a programmable
Setting the "external operation signal input" parameter
2
Change the "external operation signal input" parameter to the
external operation.
3
Operation signals
Turn the FWD input or the REV input ON.
4
Motor rotates
5
Motor deceleration stops
This operation example is for when the rotation speed is set to the operation data No.0.
If the operation input signal being ON is
turned OFF
Setting the "external operation signal input" parameter
Change the setting for the "external operation signal input" parameter (
motor externally.
•"OFF" at the time of shipment: The operation using the front panel is set.
•Change to "ON" or "rE" for the setting of external operation.
Setting range
: Operation/standstill using front panel (factory setting)
oFF
: Operation/standstill using external signals (The operation with the front panel is
on
: Operation/standstill using external signals (The operation with the front panel is
rE
The "external operation signal input" parameter (
) is found in the parameter mode. (p.24)
oEn
controller
p.16
• When using switches and relays
p.14
) when operating and stopping the
oEn
Enabled
Disabled
.)
.)
Front panel operation
Operation using the switches and setting dial on the front panel can be set to "
Setting Operation switch Rotation direction switch Setting dial
on
rE
The data mode, parameter mode, and the I/O monitor of the monitor mode
*
are enabled (possible to set).
○ ○ ○
× ×
×
*
Enable:
○
" or "
Disable:
×
Operation switch
Rotation direction
switch
Setting dial
."
−19−
Page 20

Operating
Forward and reverse operationRotation speed switching/Stop mode selection
When the setting is "ON"
z
Operation by switches on the front panel: Enable
When turning the operation input signal ON while the operation switch is set to the RUN side, the motor rotates.
When the operation switch is set to the "STAND-BY" side, the motor decelerates to a stop even if the operation input
signal is being ON.
Turning the setting dial changes the motor rotation speed.
If the rotation direction switch is changed, the motor rotates in the opposite direction.
When the setting is "RE"
z
Operation by switches on the front panel: Disable
If the operation switch or rotation direction switch are operated while setting to "RE," "rE" will be displayed.
Also, if the setting dial is operated while displaying the rotation speed, alarm, or warning in the monitor mode, "
rE
will be displayed.
The data mode, parameter mode, and the I/O monitor of the monitor mode are enabled (possible to set).
The display time of "
" varies depending on the switch.
rE
•When setting the operation switch to the "RUN" side, "rE" will be displayed continuously.
•When switching the rotation direction switch to "FWD" (or "REV"), or when operating the setting dial, "
rE
" will
be displayed for two seconds.
Operation • Stop
"
Operation
z
The motor rotates when either of the FWD input or REV input is turned ON.
Stop
z
There are two stopping methods.
Deceleration stop: If the signal being ON is turned OFF, the motor decelerates to a stop.
Instantaneous stop: If the FWD input and the REV input are turned ON simultaneously, the motor stops instantaneously.
This is an example for when the "external operation signal input" parameter is set to "ON" and the rotation direction
switch is set to the "FWD" side.
Motor operation
Operation switch
RUN
STAND-BY
FWD input
REV input
ON
OFF
ON
OFF
Example of timing chart
Deceleration
stop
CW CW CW
50 ms or more
∗
CCW
Deceleration
stop
∗ ∗
Instantaneous
stop
Deceleration
stop
CCW
∗ 10 ms or more
Deceleration
stop
−20−
Page 21

Operating with multiple speeds
Power ON
Available operation data
No.0 No.1 No.2 No.3 No.3
Data of up to 4 speeds can be operated with switching the data by the external signal.
When 3 speeds or more are used, only unidirectional operation is available.
Data setting method
Example: Set the rotation speed to 3000 r/min (change from 50 r/min)
Panel display
Press two times
M
Data
mode
For the screen transitions,
refer to p.24.
Press
F
Data number
selection screen
Data No.0:
The desired operation data
number can be selected from
the operation data No.0 to No.3
(4 data) by pressing .
Data No.0
Press Press
F
selection screen
Operating data
No.0
The desired operation data
can be selected by pressing .
∙ Rotation speed ( )
∙ Acceleration time ( )
∙ Deceleration time ( )
∙ Initialize ( )
Explanation of graphic symbols
MODE key
M
Setting the rotation speed
Setting screen
The display
blinks
Rotation speed:
50 r/min (Factory setting)
Turn
Turn until the number
reaches "3000"
F
setting
The display
blinks
Press
Operating
FUNCTION key
F
Setting dial
Data determined
M
Press once
Blinks a few times fast
→
Select the other operation data number and set data.
Operating method
Operate the motor by selecting any of the operation data No.0 to No.3 based on a combination of ON/OFF status of the M0 and
M1 inputs. The motor is operated using the rotation speed, acceleration time, and deceleration time in the selected operation data
number. This explains an example for when 4-speed operation is performed with the FWD, M0, and M1 inputs.
[Operation procedure]
•Example of operating condition
(4-speed operation *)
Operation
data No.
When changing from the present speed to
the new speed, the acceleration time and
deceleration time set in the next operation data
number are used.
In the case of the operation with 4 speeds, both the FWD input and the REV input cannot be assigned.
*
M0 M1
0 OFF OFF 3000
1 ON OFF 1000
2 OFF ON 2000
3 ON ON 500
1. Set the "external operation signal input" parameter to "ON" from "OFF." (Factory setting: OFF)
2. Set the operation switch to the "RUN" side.
3. Select the operation data number using the M0 and M1 inputs.
4. When the FWD input is turned ON, the motor rotates at the rotation speed of the selected
operation data number.
5. If the M0 and M1 inputs are switched, the motor changes to the rotation speed of the operation
data number selected.
6. If the FWD input being ON is turned OFF, the motor decelerates to a stop.
number
Rotation speed
[r/min]
Motor operation
Operation switch
STAND-BY
FWD input
M0 input
M1 input
RUN
ON
OFF
ON
OFF
ON
OFF
No.0 No.1 No.2
No.3
−21−
Page 22

Operating
"
" side
Switching the motor rotation direction
When turning the FWD input or REV input ON, the motor rotation direction varies depending on the state of the
rotation direction switch. The rotation direction shown in the gure below is as viewed from the motor output shaft.
Rotation direction switch
"FWD" side
REV
External operation input
FWD input REV input
Motor rotation direction:
Clockwise
CW
Motor rotation direction:
Motor rotation direction:
Counterclockwise
CCW
Motor rotation direction:
Counterclockwise
CCW
Clockwise
CW
If the rotation direction switch is changed, the motor will decelerate to a stop and start rotating in the direction being
switched.
If the "external operation signal input" parameter is set to "RE," the rotation direction switch will be disabled.
The rotation direction at which "RE" was set is the same direction as the
"FWD" side
in the gure above.
Rotation direction of the gearhead output shaft
The rotation direction of the gearhead output shaft varies depending on the type or the gear ratio of the gearhead.
Check the operating manual supplied with the motor for the rotation direction of the gearhead output shaft.
For switching the display or setting, refer to p.23 "7 Convenient functions."
−22−
Page 23

7 Convenient functions
7.1 Functions list
The following functions are available for this product.
Convenient functions
D
Functions Description
Displays the rotation speed of the motor output shaft.
Rotation speed
Conveyor transfer speed
i
s
p
l
Speed increasing
Load factor
Operation data No.
a
y
S
e
Alarm
Warning
I/O signals
Rotation speed
Acceleration time,
deceleration time
Lock function
Operation using
programmable controller
t
t
i
n
Limiting the setting range
of the rotation speed
Slight position-keeping
g
Changing the function for
I/O signals
Initial display at power ON
Data initialization
Displays by converting the motor rotation speed into the rotation
speed of the gearhead output shaft.
Displays by converting the motor rotation speed into the transfer
speed of the conveyor drive.
Displays by converting the motor rotation speed into the increasing
speed.
Displays the load torque applied on the motor output shaft as a
percentage (%).
Displays the operation data number that is presently operating.
Displays the alarm information by the alarm code.
Displays the alarm records.
Displays the warning information by the waning code.
Displays the warning records.
Checks whether a signal is input.
Checks whether a signal is output.
Sets the motor rotation speed using the setting dial.
Sets the motor rotation speed in the operation data.
Sets using the acceleration/deceleration time potentiometer.
Sets in the operation data.
Disables an operation with the setting dial so that the set data
cannot be changed.
Operates by inputting signals externally.
Disables an operation with the setting dial on the front panel.
Operates with multiple speeds. (Up to 4 speeds)
Sets the upper limit and lower limit of the rotation speed.
The load position can be kept at motor standstill.
Changes the functions assigned to the input signals
(3 input signals).
Changes the functions assigned to the output signals
(2 output signals).
Changes the display item when turning on the power.
Restores the operation data to the factory setting (initial value).
Restores the parameter setting to the factory setting (initial value).
Reference
page
28, 26
29, 26
28
28, 32
28, 35
28
18
29
30
29
31
19
21
31
32
27
26
29
26
−23−
Page 24

Convenient functions
7.2 Setting items and panel displays
The display blinksThe display is lit
Top screen
Power ON
This is a state being set.
After the setting was changed, it is determined when the
display changes from blinking to lighting.
Monitor mode
Rotation
speed
M
Load factor
M
Operation data No.
M
Alarm
M
Warning
M
M M
Speed setting
F
F
F
F F
Return to the "alarm record 1"
F
Return to the "warning record 1"
(blinking display)
Alarm record 1
M
Clear alarm
record
M
Alarm
reset
M
Warning record 1
M
Clear warning
record
M
∗1
F
∗2
Returns to
the display at
F
F
power ON
(Only if an alarm
is present)
∗1
F
The setting can be changed while the display blinks.
Data mode
FF
Operation
data No.0
M
Operation
data No.3
M
Return to the
"operation
data No.0"
F
Return to the "rotation speed 0"
F
Return to the "rotation speed 3"
Rotation
speed 0
M
M
M
M
M
M
M
M
F
Acceleration
time 0
F
Deceleration
time 0
F
Initialize
∗1
data 0 Execution
F
Rotation
speed 3
F
Acceleration
time 3
F
Deceleration
time 3
F
Initialize
∗1
data 3 Execution
F
Data setting
M
Data setting
M
Data setting
M
∗2
M
Data setting
M
Data setting
M
Data setting
M
∗2
M
I/O monitor
M
"rotation speed"
Return to the "monitor mode"
The display for when turning on the power can be changed using the "panel initial view" parameter.
F
Return to the
Input monitor
M
M
Return to the "input monitor"
F
Output monitor
F
−24−
Page 25

Explanation of graphic symbols
When the front panel is removed
Convenient functions
M
: Press the MODE key : Press the FUNCTION key
F
Parameter mode
F
Speed
reduction
ratio
M
M
M
M
F
Speed
increasing
ratio
F
Panel initial
view
F
Prevention of
operation at
power-on
alarm
F
M
Data setting
M
Data setting
M
Data setting
M
Data setting
M
External
operation
signal input
M
Input function
selection
M
Output
function
selection
M
Setting dial
Data setting
F
F
F
M
Signal
selection 0
M
Signal
selection 2
M
Signal
selection 0
M
Signal
selection 1
: Turn the setting dial
: Press the setting dial
Return to the "monitor mode"
∗2
Data setting
M
Data setting
M
Data setting
M
Data setting
∗2
∗2
Reset method
selection for the
prevention of
operation at
power-on
alarm
M
Analog
acceleration/
deceleration
time
M
Speed upper
and lower
limit
M
Slight
position-keeping
selection
M
M
Overload alarm
detection time
except when
Data setting
F
F
F
F
M
Data setting
M
Speed upper
limit
M M
Speed lower
limit
M
Data setting
M
∗2
∗2
Data setting
Data setting
M
∗2
∗2
holding a
shaft
M
M
M
M
"speed reduction ratio"
F
Overload
warning
level
F
Rotation speed
attainment
band
F
Initialize the
parameter
∗1
mode
F
Retrun to the
∗
the screen is not displayed.
∗
" " was displayed.
Data setting
M
Data setting
M
Data setting
M
Execution
M
1 When operations are limited by the lock function,
2 It cannot be performed while operating.
M
∗2
−25−
Page 26

Convenient functions
7.3 Parameter list
Operation mode: Parameter mode
Item Display Description Setting range
Speed reduction ratio
Speed increasing ratio
Panel initial view
Prevention of operation at
power-on alarm
Reset method selection for
the prevention of operation at
power-on alarm
Analog acceleration/
deceleration time
Speed upper
and lower
limit
Slight position-keeping selection
External operation signal input
X0 input function selection
X1 input function selection
X2 input function selection
SPL~n
Speed
upper limit
Speed
lower limit
Gr-r
Sp-r
PDSp
opAL
oArS
tAtD
H
Lo
HoLD
oEn
n-0
n-1
n-2
Sets the speed reduction ratio
relative to the rotation speed of the
motor output shaft. Displays the
speed calculated based on the speed
reduction ratio on the monitor mode.
If the speed reduction ratio for the
conveyor is calculated and input, the
conveyor transfer speed can also be
displayed.
When increasing the motor rotation
speed using the external mechanism
and others, the converted speed can
be displayed.
After the power is turned on, the item
displayed on the monitor mode can
be changed.
Sets whether to enable or disable the
"prevention of operation at power-on
alarm." Refer to p.32 for alarms.
Selects how to reset the prevention
of operation at power-on alarm.
Changes the setting method of
acceleration/deceleration time.
Sets the upper limit of the rotation
speed.
Sets the lower limit of the rotation
speed.
The load position can be kept at motor
standstill.
The operation method can be
selected between the front panel and
external input signals.
When operating or stopping the motor
using the external input signals, the
functions of the operation switch,
rotation direction switch, and setting
dial can be set to disable.
Assigns the input signals to the
external input terminals.
Factory
setting
1.00 to 9999 1.00
1.00 to 2.00 1.00
SpD
D-no
oFF
on
DoFF
ArSt
An
d G
0, 50 to 4000
oFF
on
oFF
on
rE
---F_wd
rEu
~n0
~n1
ArSt
E-Er
H-Fr
Rotation speed (r/min)
Load factor (%)
Operation data No.
Disable
Enable
Resets by turning the FWD
or REV input OFF or by
setting the operation switch
to the STAND-BY side.
Resets using the ALARMRESET input or the alarm
reset on the monitor mode.
Using the acceleration/
deceleration time
potentiometer (analog)
Sets using the operation
data(digital)
Disable
Enable
Operation/standstill using
front panel
Operation/standstill using
external signals
(Front panel operation:
Enable)
Operation/standstill using
external signals
(Front panel operation:
Disable)
Not used
FWD
REV
M0
M1
ALARM-RESET
EXT-ERROR
H-FREE
SpDtrQ
on
DoFF
An
4000
50
oFF
oFF
F_wd
rEu
~n0
−26−
Page 27

Convenient functions
Item Display Description Setting range
Not used
ALARM-OUT1
SPEED-OUT
ALARM-OUT2
MOVE
VA
WNG
− −
----
Y0 output function selection
oUt0
Assigns the output signals to the
external output terminals.
AL-1
Sp
AL-2
~nouE
Y1 output function selection
oUt1 AL-1
uA
_wnG
Sets the time to output the alarm
Overload alarm detection time
except when holding a shaft
Overload warning level
Rotation speed attainment band
Initialize the parameter mode
Note •Do not turn off the motor power while the initialization is still in progress (= while the display is blinking).
Doing so may damage the data.
•When setting the speed increasing ratio to 1.00, the speed reduction ratio will be effective. When setting the
speed increasing ratio to other than 1.00, the speed increasing ratio will be effective.
•When setting a longer time in the "overload alarm detection time except when holding a shaft" parameter,
an overload status may continue. Repeating this condition may result in shorter service life of the motor and
gearhead.
•If a load exceeding the limited duty region was applied or the output shaft was locked, the "overload alarm
detection time except when holding a shaft" is maximum 5 seconds.
oLt~n
oL-L
after detecting the overload condition
when a load up to the limited duty
region exceeding the continuous duty
region was applied.
Sets the detection level (load factor)
for the overload warning function
based on the rated current being
100%.
Sets the band within which the
rotation speed of the motor is deemed
uA
to have reached the set value.
Restores the value set in the
parameter mode to the factory
n
setting.
0.1 to 60.0 s 30.0
50 to 120% 120
0 to 400 r/min 200
Factory
setting
Sp
Description of I/O signals
Signal Terminal Signal name Description
Input
Output
X0
X1
X2
Y0
Y1
FWD
REV
M0
M1
ALARM-RESET
EXT-ERROR
H-FREE
ALARM-OUT1 This signal is output when an alarm generates (normally closed).
SPEED-OUT
ALARM-OUT2
MOVE This signal is output while the motor is operating.
VA
WNG
The motor rotates when either of the FWD input or REV input is turned ON. If the FWD
input and REV input are turned ON simultaneously, the motor stops instantaneously.
These signals are used to select the operation data number.
If both signals are turned OFF, the operation data No.0 is selected.
This signal is used to reset the present alarm when a protective function was activated.
Refer to p.34 for timing chart.
When turning this signal OFF, an alarm generates and the motor stops instantaneously.
Then "
The slight position-keeping is released when the H-FREE input is turned ON.
(When the slight position-keeping selection is set to "Enable")
30 pulses are output with each revolution of the motor output shaft synchronously with
the motor operation. The pulse width of output pulse signals is 0.2 ms. You can use the
SPEED-OUT output to calculate the motor speed.
This signal is output when exceeding the overload warning level.
Or this signal is output when an overload alarm generates (normally closed).
This signal is output when the motor rotation speed becomes equal the value set by
the rotation speed attainment band parameter.
This signal is output when a warning generates. (The motor will continue to operate.)
When the warning is released, it will automatically turn OFF.
" will be shown on the display (normally closed).
AL6E
SPEED-OUT output frequency (Hz) =
Rotation speed (r/min) = × 60
SPEED-OUT output frequency
1
T
30
T
0.2 ms
Note Do not assign the same input signal to multiple input terminals. When the same input signal is assigned to
multiple input terminals, the function will be executed if any of the terminals becomes active.
−27−
Page 28

Convenient functions
X2
Input
Output
7.4 Items displayed on the driver
Operation mode: Monitor mode
Item Display Description
•Monitors the rotation speed of the motor.
•Monitors the rotation speed of the gear output shaft or conveyor transfer speed
Rotation speed
Load factor
*
t-
when the "speed reduction ratio" parameter is set.
0
•When the "speed increasing ratio" parameter is set, the rotation speed being
increased by the external mechanism is displayed.
The motor generating torque can be checked. The present load factor is displayed
based on the rated torque being 100%.
The load factor is displayed in 1% increment between 40% and 200%, and "
is displayed if the load factor is smaller than 40%.
The display is the load factor on the motor output shaft. It is not for the gearhead
output shaft.
In the case of the gearhead output shaft, the permissible torque varies depending
on the gear ratio of the gearhead used.
Use the product so that the load does not exceed the permissible torque of the
gearhead output shaft.
t-
"
When the slight position-keeping is enabled, "
Operation data No.
Alarm
Warning
I/O monitor
For the factory setting, the rotation speed is displayed when the power is turned on.
*
The display for when turning on the power can be changed using the parameter. Panel initial view parameter: p.26
Display of the rotation speed
In the case of motors with the JH gearhead, use the actual gear ratio about the gear ratio of gearhead.
Check the operating manual supplied with the motor for the actual gear ratio.
Displayed digit number when setting the speed reduction ratio or speed increasing ratio
z
Since the number of signicant gures for the integer part is changed if the speed reduction ratio or speed increasing
ratio is set, the digit number displayed on the panel will also be changed.
opE0
AL00
_wn00
Monitors the operation data No. currently selected.
When an alarm generates, the alarm code is displayed. You can also reset alarms
or check and clear alarm records. Refer to p.32 for alarm type.
When a warning generates, the warning code is displayed. You can also check
and clear warning records. Refer to p.35 for warning type.
You can check the ON/OFF status of each I/O signal of the driver. If the signal is
ON, the corresponding digit is lit. If the signal is OFF, the digit is unlit.
o
signals
X0
X1
signals
tH
" is displayed.
Y0
Y1
−28−
Setting value for the speed reduction
ratio and speed increasing ratio
1.00 to 9.99 0 to 9999
10.00 to 99.99 0.0 to 999.9
100.0 to 999.9 0.00 to 99.99
1000 or more 0.000 to 9.999
Display digit on the
monitor mode
Page 29

Convenient functions
Conveyor transfer
Alarm present
r/min
Display the conveyor transfer speed
z
To display the conveyor transfer speed, calculate the conveyor speed reduction ratio by using the formula below and
set to the "speed reduction ratio" parameter.
Conveyor speed reduction ratio =
Feed rate per motor revolution
1
When the calculated conveyor speed reduction ratio is used, the conveyor transfer
speed is converted as follows:
Conveyor transfer speed [m/min] =
Motor output shaft rotation speed [r/min]
Conveyor speed reduction ratio
Gearhead gear ratio
=
Pulley diameter [m] × π
speed
Pulley
diameter
Example: The pulley diameter is 0.1 m and gear ratio of the gear head is 20
Gearhead gear ratio
Pulley diameter [m] × π
From the conversion formula, the conveyor speed reduction ratio is calculated as 63.7 in this example.
If the speed reduction ratio is 63.7 and rotation speed of the motor is 1300 r/min, the conveyor transfer speed is
converted as follows:
Conveyor transfer speed [m/min] =
1300
63.7
≅ 20.4
=
0.1 [m] × π
20
≅ 63.7Conveyor speed reduction ratio =
Accordingly, "20.4" is shown on the panel.
Display while an alarm generates
The alarm code is displayed while the alarm generates, and the screen can be changed to other screens by pressing the
MODE key or FUNCTION key.
However, even if the screen moved from the alarm code screen to others, the alarm code display blinks so that the
alarm state can be checked.
Example: Sensor error
(alarm code 28)
Display moves
Press FUNCTION key
When the key is not operated
for about 5 seconds
7.5 Setting the operation data
Four types of operation data can be set in this product.
Operate by selecting the operation data number using
the M0 and M1 input signals.
Refer to p.21 for details.
䠷
Rotation
speed
䠹
Acceleration
time
Deceleration
time
Time
Operation mode: Data mode
Item Display Setting range Factory setting
Operation data
No.0
No.1
No.2
No.3
Rotation speed
Acceleration time
Deceleration time
Initialization
rEu
Refer to the next page for details about the acceleration time and deceleration time.
0, 50 to 4000 r/min 50
tA
0.0 to 15.0 sec 0.5
tD
Restores the operation data to the factory setting.
n
Initializes each operation data number.
–
−29−
Page 30

Convenient functions
Acceleration/deceleration time
Time [s]
r/min
r/min
r/min
7.6 Setting the acceleration time and deceleration time
The acceleration time and deceleration time can be set so that an impact is not applied to a load when the motor is
started or stopped. There are the following two methods to set. The setting by the "acceleration/deceleration time
potentiometer" is enabled at the time of shipment.
Setting using the acceleration/deceleration time potentiometer (factory setting)
Setting range:
Acceleration time
z
0.1 to 15.0 sec (factory setting: 0.1 sec)
Acceleration/deceleration
timepotentiometer
10
0
The numbers "0" and "10"
on the potentiometer in
the figure are not indicated
on the product.
potentiometer characteristics
(representative values)
15
10
5
0
Acceleration/deceleration time
The acceleration time is set as the time needed for the motor to reach
the rated rotation speed (3000 r/min) from the standstill state.
Deceleration time
z
The deceleration time is set as the time needed for the motor to stop
from the rated rotation speed (3000 r/min).
2 4 6 8 10
potentiometer [scale]
䠷
䠹
3000
Rotation
speed
Acceleration
time
Rough indications of
the time against the scale
15 s
1 s
0.1 s
Time
Deceleration
time
Setting to the operation data with digital setting
When setting by the acceleration time and deceleration time of the data
mode, set the "analog acceleration/deceleration time" parameter of the
parameter mode to the digital setting.
For the acceleration time and deceleration time in this digital setting, set
the time needed to reach the set rotation speed.
Setting range:
0.1 to 15.0 sec (factory setting: 0.5 sec)
Motor operation
If the acceleration time and deceleration time are set shorter than
0.5 seconds, the motor takes for a longer time than 0.5 seconds to
reach the speed.
If they are set to approximately 0.5 seconds or more, the motor can
accelerate and decelerate in the setting time. (With no load)
When the frictional load or load inertia is increased, the operating
time to reach the setting will be longer.
䠷
Rotation
speed
䠷
Rotation
speed
䠹
Acceleration
time
䠹
Acceleration
time
Deceleration
time
Setting time
Actual motor
operation
Time
Time
−30−
Page 31

7.7 Data locking for the set data
Setting range of the rotation speed
The data setting can be locked so that the set rotation
speed does not change.
The setting of data and parameters cannot be changed
using the setting dial while locking.
Remove the front panel and perform the operations shown
in the next.
Convenient functions
[MODE] key
Setting
Power ON
Press the [MODE] key once.
Monitor mode
Press and hold the [MODE] key
(about 5 seconds)
Panel display
∗
Reset
Monitor mode
Press and hold the [MODE] key
(about 5 seconds)
Reset locking
Locking
Even when the top screen (
*
can be performed.
Display for when the edit lock function is enabled
z
If the setting value of the operation data or parameter is tried to change, "
DAtA, PAr
) of the data mode or parameter mode is displayed, the data locking or reset locking
" is displayed for about one second.
L~h
7.8 Limiting the setting range of the rotation speed
The setting range of the rotation speed is set to 50 to 4000 r/min at the time of shipment. This setting range can be
changed to limit.
Panel display
∗
[Example]
When limiting the speed range
by setting to the speed upper
limit to 3000 r/min and the
speed lower limit to 300 r/min
Speed upper limit
z
Set the upper limit value of the rotation speed in the "speed upper limit" of the "speed upper and lower limit"
parameter.
The rotation speed exceeding the "speed upper limit" cannot be set in the rotation speed of the operation data.
If the rotation speed exceeding the "speed upper limit" is already set in the operation data, the rotation speed set in the
"speed upper limit" will be overwritten.
Speed lower limit
z
Set the lower limit value of the rotation speed in the "speed lower limit" of the "speed upper and lower limit"
parameter.
The rotation speed lower than the "speed lower limit" cannot be set in the rotation speed of the operation data.
If the rotation speed lower than the "speed lower limit" is already set in the operation data, the rotation speed set in
the "speed lower limit" will be overwritten.
Factory setting
50
300 3000
4000
[r/min]
[r/min]
−31−
Page 32

Alarms and warnings
Rated torque
7.9 Holding a load at motor standstill
If the "slight position-keeping selection" parameter is set to ON (enable), the holding torque is somewhat generated
when the motor stops (slight position-keeping torque).
The factory setting is OFF (disable). Refer to p.24 or p.26 for how to change the parameter.
Slight position-keeping torque
z
Approximately 50% of the rated torque is generated according to the angular variation of the motor output shaft
(gure below).
Note •Do not continuously apply a load exceeding the slight position-keeping torque. Continuing to
rotate the motor output shaft by the external force may cause damage to the motor.
•Do not use for the purpose of anti-drop mechanism in the event of a power outage. If the power
supply to the driver is turned off, the holding force of the motor may lose, causing the load to fall.
100%
Slight position-keeping torque
About 50%
About 60°
About 60°
About –50%
Angle variation [deg]
(motor output shaft)
Slight position-keeping torque characteristic
8 Alarms and warnings
The driver provides alarms that are designed to protect the driver from overheating, poor connection, error in
operation, etc. (protective functions), as well as warnings that are output before the corresponding alarms generate
(warning functions).
8.1 Alarms
If a protective function is activated and an alarm is generated, the motor will coast to a stop, and then the holding
power of the motor output shaft is lost. At the same time, the alarm code is displayed. The alarm type can be checked
by the alarm code.
Note •Cycle the power to reset the overcurrent and EEPROM error alarms. When cycling the power,
turn off the power and wait for minimum 1 minute before doing so. If the product does not
operate properly after the power is cycled, the internal circuit may be damaged. Contact your
nearest Oriental Motor branch or sales ofce.
•The motor stops instantaneously at the time of external stop (
the holding power of the motor output shaft is lost.
). After the motor is stopped,
AL6E
−32−
Page 33

Alarm list
Alarm
code
AL20
AL21
AL22
AL25
AL28
AL30
AL31
AL41
AL42
AL46
AL6E
Overcurrent
Main circuit
overheat
Overvoltage
Undervoltage
Sensor error
Overload
Overspeed
EEPROM error
Sensor error at
power-on
Prevention of
operation at
power-on
External stop *4The EXT-ERROR input turned OFF. Check the EXT-ERROR input.
Alarm type Cause Remedial action
*3
Excessive current has own through
the driver due to ground fault, etc.
The temperature inside the driver
exceeded the alarm detection
temperature.
•The power supply voltage exceeded
approximately 120% of the rated
voltage.
•Vertical drive (gravitational operation)
was performed or a load exceeding
the permissible load inertia was
driven.
The power supply voltage became
lower than approximately 60% of the
rated voltage.
During operation, the sensor signal
line of the motor cable or connection
cable was disconnected, or the sensor
connector came off.
•A load exceeding the continuous
duty region was applied to the motor
for the time exceeded the value set
in the "overload alarm detection
time except when holding a shaft"
parameter. Or the output shaft was
locked.
*2
•The motor was started running under
the state that the motor temperature
was low.
The rotation speed of the motor output
shaft exceeded approximately
4800 r/min.
•The stored data was damaged.
•Data became no longer writable or
readable.
Before the power supply is turned
on, the sensor signal line of the
motor cable or connection cable was
disconnected, or the sensor connector
came off.
When the "external operation signal
input" parameter was set to "OFF,"
while the operation switch was set to
the "RUN" side, the power was turned
on again.
When the "external operation signal
input" parameter was set to "ON,"
while the FWD input or REV input was
turned ON, the power was turned on
again.
When the "external operation signal
input" parameter was set to "RE,"
while the FWD input or REV input was
turned ON, the power was turned on
again.
Check the wiring between the driver
and motor for damage.
•Review the ambient temperature.
•Review the ventilation condition in
the enclosure.
•Check the power supply voltage.
•If this alarm occurs during operation,
reduce the load or make the
acceleration/deceleration time
longer.
•Check the power supply voltage.
•Check the wiring of the power
supply cable.
Check the wiring between the driver
and motor.
•Reduce the load.
•Review the operation pattern such
as acceleration/deceleration time.
•If the ambient temperature is low,
perform a trial operation in a light
load state.
•Reduce the load.
•Review the operation pattern such
as acceleration/deceleration time.
Initialize the parameters.
Check the wiring between the driver
and motor.
Set the operation switch to the
"STAND-BY" side from the "RUN"
side.
•Set the operation switch to the
"STAND-BY" side from the "RUN"
side.
•Turn the FWD input or REV input
from ON to OFF.
Turn the FWD input or REV input
from ON to OFF.
Alarms and warnings
Alarm
reset
*1
Not
possible
Possible
Not
possible
Possible
When using the alarm reset on the monitor mode or resetting the alarm by assigning the ALARM-RESET input to the input
*1
terminal.
If a load exceeding the limited duty region was applied or the output shaft was locked, an alarm is generated in maximum
*2
5 seconds. However, if the value of the "overload alarm detection time except when holding a shaft" parameter is set to
5 seconds or less, the overload alarm is generated in the time that was set.
This alarm is output when the "prevention of operation at power-on alarm" parameter is set to "Enable."
*3
Refer to p.26 for setting whether to enable or disable the "prevention of operation at power-on alarm" parameter.
This alarm is output when the EXT-ERROR is assigned to input terminal.
*4
−33−
Page 34

Alarms and warnings
Alarm present
Alarm reset
Always reset an alarm after ensuring safety by removing the cause of the alarm and turning the operation
signal OFF.
[How to reset the alarm]
•Turn the ALARM-RESET input to ON and then OFF. (The alarm will be reset at the OFF edge of the input.)
•Perform an alarm reset with the monitor mode.
•Turn off the power, wait for at least 1 minute, and then cycle the power.
When an alarm is reset, "
The screen selected in the "panel initial view" parameter is displayed.
*
" is displayed for two seconds, then "0" * is displayed. (Except for cycling the power)
AL00
Note •If the motor does not operate properly after the power is cycled, internal circuit damage is
suspected. Please contact your nearest Oriental Motor branch or sales ofce.
•Continuing the operation without removing the cause of the problem may cause malfunction of
the equipment.
Reset using the ALARM-RESET input
z
Turn the operation signal OFF and then turn ALARM-RESET input ON (keep it ON for 10 msec or more).
The ALARM-RESET input is disabled while the operation signal is being ON.
The gure shows an example for which the operation signal is the FWD input.
Alarm generation
Rotation
Motor operation
ALARM-RESET input
ALARM-OUT1 output
Reset with the monitor mode
z
FWD input
STOP
ON
OFF
ON
OFF
ON
OFF
Stop
10 ms or more
10 ms or more
10 ms or less
Set the operation switch to the "STAND-BY" side from the "RUN" side, and reset the alarm by the following steps.
−34−
Example: Sensor error
(alarm code 28)
Press
Alarm
record 1
Press Press Press
The screen selected in the "panel initial view" parameter is displayed.
*
When the present alarm is the prevention of operation at power-on alarm "
z
Clear
alarm
record
F
Alarm
reset
Display for
F
two seconds
Operation
speed
∗
Explanation of graphic symbols
FUNCTION key
F
Setting dial
"
AL46
When operating the motor using the front panel, change the setting of the operation switch from the RUN side to the
STAND-BY side.
When operating the motor using external input signals, the alarm will be reset by turning the operation signal OFF.
This is the factory setting. The method to reset the alarm can be changed. Refer to p.24 or p.26 for details.
Alarm records
Up to 9 generated alarms are saved in the non-volatile memory in order of the latest to oldest.
When clearing the alarm records, perform the alarm record clear on the monitor mode.
Note Do not turn off the driver power while an alarm records are being cleared (=while the display is
blinking). Doing so may damage the data.
Page 35

8.2 Warnings
The warning types and records can be displayed on the monitor mode.
When a warning generates, the WNG output will be turned ON. The WNG output is not assigned to the output
terminal at the time of shipment. Refer to p.27 "Description of I/O signals."
Warning list
Warning
code
_wn21
_wn30
_wn6c
Warning records
Up to 9 generated warnings are saved in the RAM in order of the latest to oldest.
When clearing the warning records, perform the warning record clear on the monitor mode.
Alarms and warnings
Warning type Motor operation Generation condition Remedial action
•Review the ambient
temperature.
•Review the ventilation
condition in the enclosure.
Check the load condition.
When assigning the operation
signal, check that the input
terminal to be assigned is
turned OFF.
Main circuit
overheat
Overload
Operation error Stop
Continue to
operate
The temperature inside the driver
exceeded the warning detection
temperature.
A load exceeding the "overload
warning level" parameter was
applied to the motor.
When the input terminal is
ON, the operation signal was
assigned using the "input function
selection" parameter.
Note The warning records will be cleared by turning off the driver power.
−35−
Page 36

Troubleshooting and remedial actions
9 Troubleshooting and remedial actions
During motor operation, the motor or driver may fail to function properly due to an improper speed setting or wiring.
When the motor cannot be operated correctly, refer to the contents provided in this section and take appropriate action.
If the problem persists, contact your nearest ofce.
Note •Check the alarm message when the alarm generates.
•I/O signals can be monitored with the monitor mode. Use to check the wiring condition of the I/O signals.
●
The power supply is not connected correctly or it has become improper connection.
Check the connections between the driver and power supply.
▷
●
The operation switch is set to the "STAND-BY" side.
Set the operation switch to the "RUN" side.
▷
●
When operating the motor using the operation switch, the "external operation signal input"
parameter is set to "ON" or "RE."
Set the "external operation signal input" parameter to "OFF" after setting the operation switch to the
▷
STAND-BY side.
The motor does not
operate.
●
When operating the motor using external signals, the "external operation signal input"
parameter is set to "OFF."
Set the "external operation signal input" parameter to "ON" or "RE" after turning the input operation
▷
signal OFF.
●
Both the FWD input and REV input are being OFF.
Both the FWD input and REV input are being ON.
Turn either of the FWD input or REV input ON.
▷
●
An alarm is present.
A protective function is triggered and an alarm generates. Refer to p.32 and reset the alarm after removing
▷
the cause of the alarm.
The rotation speed is
not displayed.
The motor rotates in the
direction opposite to
the specied direction.
The setting cannot be
performed using the
setting dial.
The set rotation speed
is not saved.
The motor is not
reversed by the rotation
direction switch.
The rotation speed
cannot be increased.
The rotation speed
cannot be decreased.
●
The "panel initial view" parameter is not set to the rotation speed.
Set the "panel initial view" parameter to the rotation speed.
▷
●
The FWD input and REV input are connected wrongly or otherwise not connected correctly.
Check the connection of the FWD input and REV input.
▷
●
The gear ratio that the gearhead output shaft rotates in the opposite direction against the
motor rotation direction is used.
Check the operating manual supplied with the motor for the rotation direction of the gearhead output
▷
shaft.
●
The rotation direction switch is set wrong.
Check the rotation direction switch.
▷
●
When the rotation direction switch is set to REV, the "external operation signal input"
parameter is set to "RE."
Check the setting of the "external operation signal input" parameter.
▷
●
The lock function has been enabled.
Release the lock function.
▷
●
It is not determined by pressing the setting dial.
After setting the rotation speed, determine it by pressing the setting dial.
▷
●
The "external operation signal input" parameter is set to "RE."
Check the setting of the "external operation signal input" parameter.
▷
●
The speed upper limit has been set.
Raise the speed upper limit.
▷
●
The speed lower limit has been set.
Lower the speed lower limit.
▷
Motor operation is
unstable.
Motor vibration is too
great.
−36−
●
The motor and gearhead output shaft is misaligned with a load shaft.
Check the coupling condition of the motor and gearhead output shaft and the load shaft.
▷
●
Eect of electrical noise.
Check the operation only with the motor, driver and other external equipment required for operation.
▷
If an eect of noise has been conrmed, implement the following countermeasures:
[Move the unit farther away from noise generation sources.] [Review the wiring.]
[Change the signal cables to a shielded type.] [Install ferrite cores.]
Page 37

10 Maintenance and inspection
10.1 Inspection
It is recommended that periodic inspections for the items listed below are conducted after each operation of the motor.
If an abnormal condition is noted, discontinue any use and contact your nearest Oriental Motor sales ofce.
Maintenance and inspection
Note •Do not conduct the insulation resistance measurement or dielectric strength test with the motor
During inspection
•Check if any of the mounting screws of the motor and gearhead are loose.
•Check if the motor or gearhead generates unusual noises from inside.
•Check if the output shaft of the motor and gearhead and a load shaft are out of alignment.
•Check if a damage or stress is applied on the cable or the connection part between the cable and driver is loose.
•Check if the openings in the driver causes clogging.
•Check if the mounting screws or the main power supply connection of the driver are loose.
•Check if the driver generates unusual smells or has foreign objects inside.
10.2 Warranty
Check on the Oriental Motor Website for the product warranty.
10.3 Disposal
Dispose the product correctly in accordance with laws and regulations, or instructions of local governments.
and driver connected. Doing so may cause damage to the product.
•The driver uses semiconductor elements, so be extremely careful when handling them.
Electrostatic discharge can damage the driver.
−37−
Page 38

Accessories (sold separately)
11 Accessories (sold separately)
Power supply cable
This cable is used to connect the driver to the power supply.
•For single-phase
100 VAC (with plug)
Length [m (ft.)] Model Length [m (ft.)] Model Length [m (ft.)] Model
1 (3.3)
2 (6.6)
3 (9.8)
These cables are not shielded cables. If conformance to the EMC Directive is required, refer to "12.2 Installing and
wiring in compliance with EMC Directive." (p.40).
A plug is attached to the power supply cables for the single-phase 100 VAC type.
*
They can be used in Japanese domestic market only.
Connection cable
This cable is used to extend the wiring distance between the driver and motor. The wiring distance between the motor
and driver can be extended to a maximum of 10.5 m (34.4 ft.).
The motor cables, connection cables and exible connection cables are shielded cables which have taken measures
against the electrical noise.
The connection cable for relay can be used by connecting up to 2 pieces.
•Connection cable •Flexible connection cable
Length [m (ft.)] Model Length [m (ft.)] Model
1 (3.3)
2 (6.6)
3 (9.8)
5 (16.4)
7 (23.0)
10 (32.8)
*
CC01AC03P
CC02AC03P
CC03AC03P
CC01BL2
CC02BL2
CC03BL2
CC05BL2
CC07BL2
CC10BL2
•For single-phase
100-120/200-240 VAC
1 (3.3)
2 (6.6)
3 (9.8)
1 (3.3)
2 (6.6)
3 (9.8)
5 (16.4)
7 (23.0)
10 (32.8)
CC01AC03N
CC02AC03N
CC03AC03N
CC01BL2R
CC02BL2R
CC03BL2R
CC05BL2R
CC07BL2R
CC10BL2R
•For three-phase
200-240 VAC
1 (3.3)
2 (6.6)
3 (9.8)
CC01AC04N
CC02AC04N
CC03AC04N
Mounting brackets for electrical circuit products
Mounting brackets convenient for installation of the driver are provided.
According to applications, the type of the mounting brackets can be selected from for DIN rail-installation type, for
panel-installation type, or for conveyor guide-installation type.
•For DIN rail-installation type
Model:
MADP05-15
Watertight and dust-resistant type Front cover
This is a cover to protect the front panel of the driver. Also, it can be used for preventing wrong operations of the
front panel. The degree of protection is IP64.
Model:
PCF12-B
Enclosure box
This is an enclosure to protect the driver from dust. It also makes possible to protect the wiring part.
Model:
PCD12, PCD12-1
About motor mounting brackets (
When the mounting bracket and motor are secured, use so that the direction of the connector for cable connection is
installed upward or sideways against the installation surface. Installing the motor connector to the downward direction
is not recommended since the motor connector is come into contact with the mounting bracket or installation surface.
•For panel-installation type
Model:
MAFP04-15
SOL
)
•For conveyor guide-installation type
Model:
MAFP05V
MAFP05H
−38−
Page 39

12 Reference
12.1 Standard and CE Marking
This product is recognized by UL under the UL and CSA standards, and it is also afxed the CE Marking under the
Low Voltage Directive. The driver model name represents the model that conforms to the standards.
UL Standards and CSA Standards
Applicable Standards
Applicable Standards Certication Body Standards File No.
UL 508C
CSA C22.2 No.274
Low Voltage Directive
•This product is designed and manufactured to be incorporated in equipment.
•This product cannot be used in IT power distribution systems.
•Install the product within the enclosure in order to avoid contact with hands.
•Be sure to ground the Protective Earth Terminal of the motor and driver.
•Isolate the cable for connecting between the motor and the driver, the power supply cable and other drive cables
from the signal cables (CN4) by means of double insulation.
UL E171462
Reference
Applicable Standards
EN 61800-5-1
Installation conditions (EN Standard)
For incorporating in equipment
Overvoltage category:
Pollution degree: 2
Protection against electric shock: Class
EMC Directive
This product has received EMC compliance under the conditions specied in "Example of motor and driver
installation and wiring" on p.41. The nal level of conformance of your mechanical equipment to the EMC Directive
will vary depending on the control system equipment used with the motor/driver, conguration of electrical parts,
wiring, layout, hazard level, and the like. It therefore must be veried through conducting EMC measures on your
mechanical equipment.
Ⅱ
Ⅰ
Applicable Standards
EN 55011 group1 classA
EN 61000-6-4
EMI
EMS
Caution: This equipment is not intended for use in residential environments nor for use on a low-voltage public
network supplied in residential premises, and it may not provide adequate protection to radio reception
interference in such environments.
EN 61800-3
EN 61000-3-2
EN 61000-3-3
EN 61000-6-2
EN 61800-3
RoHS Directive
The products do not contain the substances exceeding the restriction values of RoHS Directive (2011/65/EU).
−39−
Page 40

Reference
12.2 Installing and wiring in compliance with EMC Directive
This product has been designed and manufactured to be incorporated in equipment. The EMC Directive requires that
your mechanical equipment in which the product is installed satises the applicable requirements.
The installation/wiring methods of the motor and driver explained here represent the basic methods that are effective
in helping your mechanical equipment conform to the EMC Directive.
The nal level of conformance of your mechanical equipment to the EMC Directive will vary depending on the
control system equipment used with the motor, conguration of electrical parts, wiring, layout, hazard level, and the
like. It therefore must be veried through conducting EMC measures on your mechanical equipment.
Without effective measures to suppress the electromagnetic interference (EMI) caused by the product in the
surrounding control system equipment or the electromagnetic spectrum (EMS) generated by the product, the function
of your mechanical equipment may be seriously affected. This product will conform to the EMC Directive if installed/
wired using the methods specied below.
Connecting a mains lter
Install a mains lter which the customer provides, in the power line in order to prevent the noise generated within the
driver from propagating outside via the AC input line. For mains lters, use the products as shown in the chart, or an
equivalent.
Manufacturer
SOSHIN ELECTRIC CO., LTD HF2010A-UPF, NF2010A-UP NFU3010C-Z1
Schaffner EMC FN2070-10-06 FN3025HP-10-71
•Overvoltage category II applies to mains lters.
•Install the mains lter as close to the driver as possible.
•Use cable clamps and other means to secure the input and output cables rmly to the surface of the enclosure.
•Connect the ground terminal of the mains lter to the grounding point, using as thick and short a wire as possible.
•Do not place the AC input cable (AWG18 to 14: 0.75 to 2.0 mm
to 14: 0.75 to 2.0 mm
directly coupled to the power supply cable by means of stray capacitance.
Connecting the AC power line reactor
When inputting single-phase 200-240 V, insert a reactor (5 A, 5 mH) in the AC power line to ensure compliance with
EN 61000-3-2.
Connecting the external power supply
Use an external power supply conforming to the EMC Directive. Use a shielded cable for wiring the external power
supply over the shortest possible distance. Refer to "Wiring the power supply cable" for how to ground the shielded
cable.
How to ground
The cable used to ground the motor, driver, mains lter and power supply cable (shielded cable) must be as thick
and short to the grounding point as possible so that no potential difference is generated. Choose a large, thick and
uniformly conductive surface for the grounding point. Refer to the p.11 for the recommended grounding method.
2
). Parallel placement will reduce mains lter effectiveness if the enclosure’s internal noise is
Single-phase 100-120 V
Single-phase 200-240 V
Three-phase 200-240 V
2
) parallel with the mains-lter output cable (AWG18
−40−
Wiring the power supply cable
Use a shielded cable of AWG18 to 14 (0.75 to 2.0 mm2) in diameter for the driver power supply cable and keep it
as short as possible. Strip a part of the shielded cable and ground the stripped part using a metal cable clamp that
contacts the stripped cable around its entire circumference, or use a drain wire to make the ground connection.
When grounding the shielded cable, connect both ends (mains lter
side and power supply side) to earth to prevent a potential difference
from generating in the shielded cable.
Shielded cable
Cable clamp
Page 41

Reference
Motor
Ferrite core
Use a ferrite core when the total length of the connection cable is 10 m (32.8 ft.) or more. The ferrite core reduces the
negative effects of external noise. Use ferrite core 7427122 (Würth Elektronik GmbH & Co.KG), ZCAT3035-1330
(TDK Corporation) or its equivalent.
Connect the ferrite cores as close as possible to the driver.
Notes about installation and wiring
•Connect the motor/driver and other peripheral control equipment directly to the grounding point so as to prevent a
potential difference from developing between grounds.
•When relays or electromagnetic switches are used together with the system, use mains lters and CR circuits to
suppress surges generated by them.
•Keep cables as short as possible without coiling and bundling extra lengths.
•Separate the cable for connecting between the motor and the driver, the power supply cable and other drive cables
from the signal cables, and wire with providing a minimum clearance of 100 mm (3.94 in.) between them. If they
must cross, do so at a right angle. Place the AC input cable and output cable of a mains lter separately from each
other.
•Use a dedicated connection cable (sold separately) for the connection between the connector type motor and the
driver. Use an accessory connection cable when extending the wiring distance between the motor and the driver.
The EMC measures are conducted using the Oriental Motor connection cable.
Example of motor and driver installation and wiring
The gure shows the connector type.
Connection
∗2∗3
cable
AC power supply
L
N
PE
Use a ferrite core when the total length of the connection cable is 10 m (32.8 ft.) or more. (Connector type only)
*1
Shielded cable
*2
Connect the ground terminal of the connection cable to that of the driver.
*3
Refer to p.11 for details.
Precautions about static electricity
Power supply cable
[2 m (6.6 ft.)]
Grounding
∗2
Grounding
Ferrite
∗1
core
Mains
filter
Grounding
Ground plate (aluminum plate)
Grounding
Grounding
Grounding
I/O signals cable
[2 m (6.6 ft.)]
∗2
Static electricity may cause the driver to malfunction or suffer damaged.
Be sure to ground the motor and driver to prevent them from being damaged by static electricity.
Except when operating the setting dial, potentiometer or switches on the driver front panel, do not come to close
or touch the driver while the driver power is ON. To change the settings of driver acceleration/deceleration time
potentiometer, be sure to use an insulated screwdriver.
−41−
Page 42

Reference
12.3 Specications
in the motor model name indicates a code or number representing the gear ratio, the motor type, or the motor shaft type.
o
•
•The value in a state where the gearhead is not combined is described in each specication for the "rated torque," "instantaneous
peak torque," "rated rotation speed" and "speed control range."
BLM260-
Model
Rated output power (Continuous) 30 W 60 W
Power supply
input
Rated torque 0.096 N·m (13.6 oz-in) 0.191 N·m (27 oz-in)
Instantaneous peak torque 0.144 N·m (20 oz-in) [80 to 2000 r/min] 0.287 N·m (41 oz-in) [80 to 2000 r/min]
Rated rotation speed 3000 r/min
Speed control range 80 to 4000 r/min
There are products, which maximum rotation speed is 3600 r/min, depending on the gearhead type.
*
Check the operating manual supplied with the motor.
Motor
Driver
Rated voltage
Permissible
voltage range
Rated frequency 50/60 Hz
Permissible
frequency range
Rated input
current
Maximum input
current
BMUD30-A2 BMUD30-C2 BMUD60-A2 BMUD60-C2
Single-phase
100-120 V
BLM230BLM230HP-
1.2 A
2.0 A
oo
oo
Single-phase
200-240 V
Three-phase
200-240 V
−15 to +10%
Single-phase: 0.7 A
Three-phase: 0.38 A
Single-phase: 1.2 A
Three-phase: 0.75 A
Single-phase
±5%
BLM260HPBLM460BLM460SHPBLM460SHPK-
100-120 V
1.7 A
3.3 A
*
oo
oo
oo
oo
oooo
Single-phase
200-240 V
Three-phase
200-240 V
Single-phase: 1.0 A
Three-phase: 0.52 A
Single-phase: 1.9 A
Three-phase: 1.1 A
BLM5120-
Model
Rated output power (Continuous) 120 W
Power supply
input
Rated torque 0.382 N·m (54 oz-in)
Instantaneous peak torque 0.573 N·m (81 oz-in) [80 to 2000 r/min]
Rated rotation speed 3000 r/min
Speed control range 80 to 4000 r/min
There are products, which maximum rotation speed is 3600 r/min, depending on the gearhead type.
*
Check the operating manual supplied with the motor.
Motor
Driver
Rated voltage
Permissible
voltage range
Rated frequency 50/60 Hz
Permissible
frequency range
Rated input
current
Maximum input
current
BLM5120HPBLM5120HPK-
BMUD120-A2 BMUD120-C2
Single-phase
100-120 V
3.3 A
6.8 A
oo
oo
oooo
Single-phase
200-240 V
Three-phase
200-240 V
−15 to +10%
±5%
Single-phase: 2.0 A
Three-phase: 1.1 A
Single-phase: 4.1 A
Three-phase: 2.0 A
*
−42−
Page 43

z
General specications
Ambient temperature 0 to +40 °C [+32 to +104 °F] (non-freezing)
Ambient Humidity 85% or less (non-condensing)
Altitude Up to 1000 m (3300 ft.) above sea level
No corrosive gas or dust.
Surrounding atmosphere
Operation environment
Vibration
Ambient temperature Driver: −25 to +70 °C [−13 to +158 °F] (non-freezing)
Ambient Humidity 85% or less (non-condensing)
Storage environment
Altitude Up to 3000 m (10000 ft.) above sea level
Shipping environment
Surrounding atmosphere
Degree of protection Driver: IP20
Cannot be used in radioactive materials, magnetic eld, vacuum or
other special environment.
Details about the installation location are described on p.8.
Not subject to continuous vibrations or excessive impact
In conformance with JIS C 60068-2-6 "Sine-wave vibration test method"
Frequency range: 10 to 55 Hz
Pulsating amplitude: 0.15 mm (0.006 in.)
Sweep direction: 3 directions (X, Y, Z)
Number of sweeps: 20 times
No corrosive gas, dust, water or oil.
Cannot be used in radioactive materials, magnetic eld, vacuum or
other special environment.
Reference
12.4 Pin assignment
The following gures represent as the view from the direction of the lead wires side of the connection cable or the
motor cable.
•Power connector (White)
Pin No. Color Lead eire
1 Blue AWG18
2 − −
3 −
4 Purple
5 Gray
6 − −
•Sensor connector (Black)
Pin No. Color Lead eire
A3 − −
A2 Green
A1 Yellow
B3 Brown
B2 Red
B1 Orange
Drain
AWG24 or equivalent
AWG18
AWG26
6
3
5
2
4
1
Housing: 5557-06R-210 (molex)
Terminal: 5556T (molex)
B
32
1
A
32
1
Housing: J11DF-06V-KY
(J.S.T. Mfg Co., Ltd. )
Terminal: SF1F-002GC-P0.6
(J.S.T. Mfg Co., Ltd. )
−43−
Page 44

•Unauthorized reproduction or copying of all or part of this manual is prohibited.
• Please contact your nearest Oriental Motor oce for further information.
If a new copy is required to replace an original manual that has been damaged or lost, please contact your nearest Oriental Motor
branch or sales ofce.
•Oriental Motor shall not be liable whatsoever for any problems relating to industrial property rights arising from use of any
information, circuit, equipment or device provided or referenced in this manual.
•Characteristics, specications and dimensions are subject to change without notice.
•While we make every effort to offer accurate information in the manual, we welcome your input. Should you nd unclear
descriptions, errors or omissions, please contact the nearest ofce.
•
is a registered trademark or trademark of Oriental Motor Co., Ltd., in Japan and other countries.
Other product names and company names mentioned in this manual may be registered trademarks or trademarks of their respective
companies and are hereby acknowledged. The third-party products mentioned in this manual are recommended products, and
references to their names shall not be construed as any form of performance guarantee. Oriental Motor is not liable whatsoever for
the performance of these third-party products.
© Copyright
ORIENTAL MOTOR CO., LTD. 2016
Published in October 2017
Technical Support Tel:(800)468-3982
8:30 A.M. to 5:00 P.M., P.S.T. (M-F)
7:30 A.M. to 5:00 P.M., C.S.T. (M-F)
www.orientalmotor.com
Tel:+55-11-3266-6018
www.orientalmotor.com.br
Schiessstraße 44, 40549 Düsseldorf, Germany
Technical Support Tel:00 800/22 55 66 22
www.orientalmotor.de
Tel:01256-347090
www.oriental-motor.co.uk
Tel:01 47 86 97 50
www.orientalmotor.fr
Tel:02-93906346
www.orientalmotor.it
Singapore
Tel:1800-8420280
www.orientalmotor.com.sg
Tel:1800-806161
www.orientalmotor.com.my
Tel:1800-888-881
www.orientalmotor.co.th
Tel:+91-80-41125586
www.orientalmotor.co.in
Tel:0800-060708
www.orientalmotor.com.tw
Tel:400-820-6516
www.orientalmotor.com.cn
Korea
Tel:080-777-2042
www.inaom.co.kr
Hong Kong Branch
Tel:+852-2427-9800
4-8-1 Higashiueno, Taito-ku, Tokyo
110-8536 Japan
Tel:03-6744-0361
www.orientalmotor.co.jp
 Loading...
Loading...