

Oriental motor BLVM620K-GFS, BLVD20KM, BLVM640N-GFS, BLVD40NM, BLVM620K-A Operating Manual
...Page 1

WARNING
CAUTION
Note
WARNING
CAUTION
HM-5112-6
OPERATING MANUAL
Brushless Motor and Driver Package
BLV Series
Introduction
Before using the product
Only qualied personnel of electrical and mechanical engineering should
work with the product. Use the product correctly after thoroughly reading the
"Safety precautions." In addition, be sure to observe the contents described in
warning, caution, and note in this manual.
The product described in this manual has been designed and manufactured
for use in general industrial machinery, and must not be used for any other
purpose. For the power supply, use a DC power supply with reinforced
insulation on its primary and secondary sides. Oriental Motor Co., Ltd. is not
responsible for any damage caused through failure to observe this warning.
Operating manuals for the BLV Series
Operating manuals for the
carefully before using your
BLV
Series OPERATING MANUAL (This document)
This manual explains the motor and driver functions as well as installation
method, and others.
BLV
Series USER MANUAL Basic Function
This manual explains the motor and driver functions, installation and
connection methods, operations using the support software
setter
BLV
This manual explains how to control the motor via RS-485 communication.
The USER MANUAL (Basic Function, RS-485 Communication Mode) does
not come the product. For details, contact your nearest Oriental Motor sales
oce or download from Oriental Motor Website Download Page.
CE Marking
This product has been certied under the CE Marking requirements (EMC
Directive) based on the EN Standard. Because the input power supply voltage
of this product is 24 VDC/48 VDC, it is not subject to the Low Voltage
Directive. However, install and connect this product as follows.
Installation conditions
Motor and driver are to be used as a component within other equipment.
Overvoltage category: I Pollution degree: 2
EMC Directive
Refer to USER MANUAL Basic Function for installation method.
Republic of Korea, Radio Waves Act.
KC Mark is axed to this product under the Radio Waves Act, the republic
of Korea.
RoHS Directive
The products do not contain the substances exceeding the restriction values of
RoHS Directive (2011/65/EU).
, as well as troubleshooting and others.
OPX-2A
Series USER MANUAL RS-485 Communication Mode
Safety precautions
The precautions described below are intended to prevent danger or injury to
the user and other personnel through safe, correct use of the product. Use the
product only after carefully reading and fully understanding these instructions.
Series are listed below. Read the manuals
BLV
Series unit.
BLV
Handling the product without observing the
instructions that accompany a "WARNING"
symbol may result in serious injury or death.
Handling the product without observing the
instructions that accompany a "CAUTION"
symbol may result in injury or property damage.
The items under this heading contain important
handling instructions that the user should observe
to ensure safe use of the product.
MEXE02
or data
Thank you for purchasing an Oriental Motor product.
This Operating Manual describes product handling procedures and
safety precautions.
Please read it thoroughly to ensure safe operation.
Always keep the manual where it is readily available.
Do not use the product in explosive or corrosive environments, in the
presence of ammable gases, locations subjected to splashing water, or
near combustibles. Doing so may cause re, electric shock or injury.
Only qualied and educated personnel should be allowed to perform
installation, connection, operation and inspection/troubleshooting of the
product. Handling by unqualied personnel may result in re, electric
shock, injury or damage to equipment.
Do not transport, install the product, perform connections or inspections
when the power is on. Always turn the power o before carrying out these
operations. Doing so may result in electric shock or damage to equipment.
Do not use a standard type product in vertical drive such as elevating
equipment. If the driver’s protection function is activated, the motor will stop
and the moving part may drop, thereby causing injury or equipment damage.
Do not use the brake mechanism of the motor with electromagnetic brake as
a safety brake. It is intended to hold the movable parts and motor position.
This caution is to avoid personal injury or damage to the equipment.
When the driver's protection function is triggered, rst remove the cause
and then clear the protection function. Continuing the operation without
removing the cause of the problem may cause malfunction of the motor and
driver, leading to injury or damage to equipment.
Install the motor, gearhead and driver in an enclosure. Failure to do so may
result in electric shock or injury.
Keep the driver's input-power voltage within the specied range to avoid re
or electric shock.
For the power supply, use a DC power supply with reinforced insulation on
its primary and secondary sides. Failure to do so may cause electric shock.
Securely connect the cables in accordance with the connection examples.
Failure to do so may result in re or electric shock.
Do not forcibly bend, pull or pinch the cable. Doing so may result in re,
electric shock or damage to equipment.
Do not machine or modify the motor cable or connection cable. Doing so
may result in re, electric shock or damage to equipment.
Be sure to observe the specied cable sizes. Use of unspecied cable sizes
may result in re or electric shock.
Observe the specied screw tightening torque when connecting terminals to
the connector. Failure to do so may result in re or equipment damage.
Use a motor, gearhead, and driver only in the specied combination. Failure
to do so may result in re, electric shock or damage to equipment.
When the electromagnetic brake motor is used in an application of vertical
drive such as elevating equipment, operate it after checking the condition of
a load suciently so that a load in excess of the rated torque is not applied
or a small value is not set in the torque limiting value. Failure to do so may
result in injury or damage to equipment.
Always turn o the power before performing maintenance/inspection.
Failure to do so may result in injury.
Do not touch the motor or driver when conducting the insulation resistance
measurement or dielectric strength test. Accidental contact may result in
electric shock.
Regularly check the openings in the driver for accumulated dust.
Accumulated dust may cause re.
Do not disassemble or modify the motor, gearhead and driver. Doing so may
result in injury or damage to equipment. Refer all such internal inspections and
repairs to the branch or sales oce from which you purchased the product.
Do not use the motor, gearhead and driver beyond the specications. Doing
so may result in electric shock, injury or damage to equipment.
Keep your ngers and objects out of the openings in the driver, or re,
electric shock or injury may result.
Do not touch the motor, gearhead or driver while operating or immediately
after stopping. The surface of the motor, gearhead or driver may be hot and
cause a skin burn(s).
1
Page 2
To prevent the risk of damage to equipment, leave nothing around the motor
and driver that would obstruct ventilation.
Do not hold the output shaft of the motor and gearhead, as well as any of
the cables. Doing so may result in injury.
Do not touch the motor output shaft (key groove or pinion) with bare hands.
Doing so may result in injury.
When assembling the motor with the gearhead, exercise caution not to pinch
your ngers or other parts of your body between the motor and gearhead.
Injury may result.
Securely install the motor, gearhead and driver to their respective mounting
plates. Inappropriate installation may cause the motor, gearhead or driver to
detach and fall, resulting in injury or equipment damage.
Provide a cover over the rotating part (output shaft) of the motor or
gearhead. Failure to do so may result in injury.
When installing the motor or gearhead in the equipment, exercise caution
not to pinch your ngers or other parts of your body between the equipment
and motor or gearhead. Injury may result.
Securely install the load on the output shaft of the motor or gearhead.
Inappropriate installation may result in injury.
Do not shut o the negative side of the power supply during operation.
Also, note that the wiring for the power supply does not disconnect. Doing
so may cause damage to equipment.
Provide an emergency stop device or emergency stop circuit external to the
equipment so that the entire equipment will operate safely in the event of a
system failure or malfunction. Failure to do so may result in injury.
Immediately when trouble has occurred, stop operation and turn o the
driver power. Failure to do so may result in re, electric shock or injury.
Do not touch the rotating part (output shaft) during operation. This may
cause injury.
The motor surface temperature may exceed 70 °C (158 °F)
even under normal operating conditions. If the operator
is allowed to approach the motor in operation, attach a
warning label in a conspicuous position as shown in the
gure. Failure to do so may result in a skin burn(s).
Dispose the product correctly in accordance with laws and regulations, or
instructions of local governments.
Warning label
Precautions for use
Regeneration energy
When using the motor in operation such as vertical drive (gravitational
operation) or sudden starting/stopping of an inertial load, regeneration energy
may generate. Since the driver has no function to consume regeneration
energy, if the output capacity or overvoltage allowance of the DC power
supply is small, the protective function for the power supply or driver may
activate, and the motor may stop. When performing these operations, use a
DC power supply or battery that has a large output capacity or overvoltage
allowance. Also, use an electromagnetic brake motor not to drop the moving
part in vertical drive (gravitational operation).
If the protective function for the power supply or driver is activated, contact
your nearest Oriental Motor sales oce.
Do not conduct the insulation resistance measurement or dielectric
strength test with the motor and driver connected
Conducting the insulation resistance measurement or dielectric strength test
with the motor and driver connected may result in damage to the product.
Do not use a solid-state relay (SSR) to turn on/o the power
A circuit that turns on/o the power via a solid-state relay (SSR) may damage
the motor and driver.
Notes for power ON/OFF using a mechanical contact
When turning on or o the power supply using a mechanical contact (breaker,
electromagnetic switch, relay, etc.), do so only the positive side (+) of the
power supply using the mechanical contact. Turning on or o the positive
side (+) and the negative side (-) of the power supply simultaneously using
a mechanical contact may cause damage to the control circuit or peripheral
equipment.
Refer to USER MANUAL Basic Function for details.
Note on connecting a power supply whose positive terminal is
grounded
The driver's main power supply input terminal (CN1), I/O signal connector
(CN4), communication connector (CN5/CN6/CN7) and control power supply
input terminal (TB1) are not electrically insulated. When grounding the
positive terminal of the power supply, do not connect any equipment (PC,
etc.) whose negative terminal is grounded. Doing so may cause the driver and
these equipment to short, damaging both.
Preventing electrical noise
Refer to USER MANUAL Basic Function for measures with regard to noise.
2
Grease measures
On rare occasions, grease may ooze out from the gearhead. If there is concern
over possible environmental damage resulting from the leakage of grease,
check for grease stains during regular inspections. Alternatively, install an
oil pan or other device to prevent leakage from causing further damage. Oil
leakage may lead to problems in the customer’s equipment or products.
Note on using in low temperature environment
When an ambient temperature is low, a load torque may increase due to the
oil seal or viscosity of grease used in the gearhead, and the output torque
may decrease or an overload alarm may generate. However, as time passes,
the oil seal or grease is warmed up, and the motor can be operated without
generating the overload alarm.
Apply grease to the output shaft of a hollow shaft at gearhead
If you are using a hollow shaft at gearhead, apply grease (molybdenum
disulde grease, etc.) on the surface of the load shaft and inner walls of the
hollow output shaft to prevent seizure.
The driver uses semiconductor elements. Handle the driver with
care
The driver uses parts that are sensitive to electrostatic charge. Before touching
the driver, turn o the power to prevent electrostatic charge from generating. If
an electrostatic charge is impressed on the driver, the driver may be damaged.
Use a connection cable (included) when extending the wiring
distance between the motor and driver
Sliding noise of electromagnetic brake
An electromagnetic brake motor may cause a sliding noise of the brake disk
during operation. There is no functional problem.
Preparation
Checking the product
Verify that the items listed below are included. Report any missing or
damaged items to the branch or sales oce from which you purchased the
product.
Motor (with a gearhead, only for combination type) ............1 unit
Driver .....................................................................................1 unit
Connection cable ....................................................................1 pc.
CN1 connector ......................................................................1 pc.
OPERATING MANUAL (this document) .............................1 copy
Accessories for combination type
Hexagonal socket head screw set ........................................................1 set
Parallel key ......................................................................................... 1 pc.
(Secured to the gearhead output shaft on the parallel shaft gearhead)
Safety cover ........................................................................................ 1 pc.
(Included with the hollow shaft at gearhead)
Safety cover mounting screw ..............................................................2 pcs.
(Included with the hollow shaft at gearhead)
Combinations of motors and drivers
Verify the model number of the purchased unit against the number shown on
the package label. Check the model number of the motor and driver against
the number shown on the nameplate.
in the model names indicates a number representing the gear ratio.
indicates a number representing the length of a connection cable.
The combination types come with the motor and gearhead pre-assembled.
zStandard type
Combination type parallel shaft gearhead
Unit model Motor model
BLV620KSBLV640NS-
Combination type hollow shaft at gearhead
Unit model Motor model
BLV620KFBLV640NF-
Round shaft type
Unit model Motor model Driver model
BLV620KABLV640NA-
BLVM620K-GFS
BLVM640N-GFS BLVD40NM
BLVM620K-GFS
BLVM640N-GFS BLVD40NM
BLVM620K-A BLVD20KM
BLVM640N-A BLVD40NM
Gearhead
model
GFS6G
Gearhead
model
GFS6GFR
Driver model
BLVD20KM
Driver model
BLVD20KM
Page 3
zElectromagnetic brake type
Internal potentiometer (VR1)
Communication function
Motor power connector
r
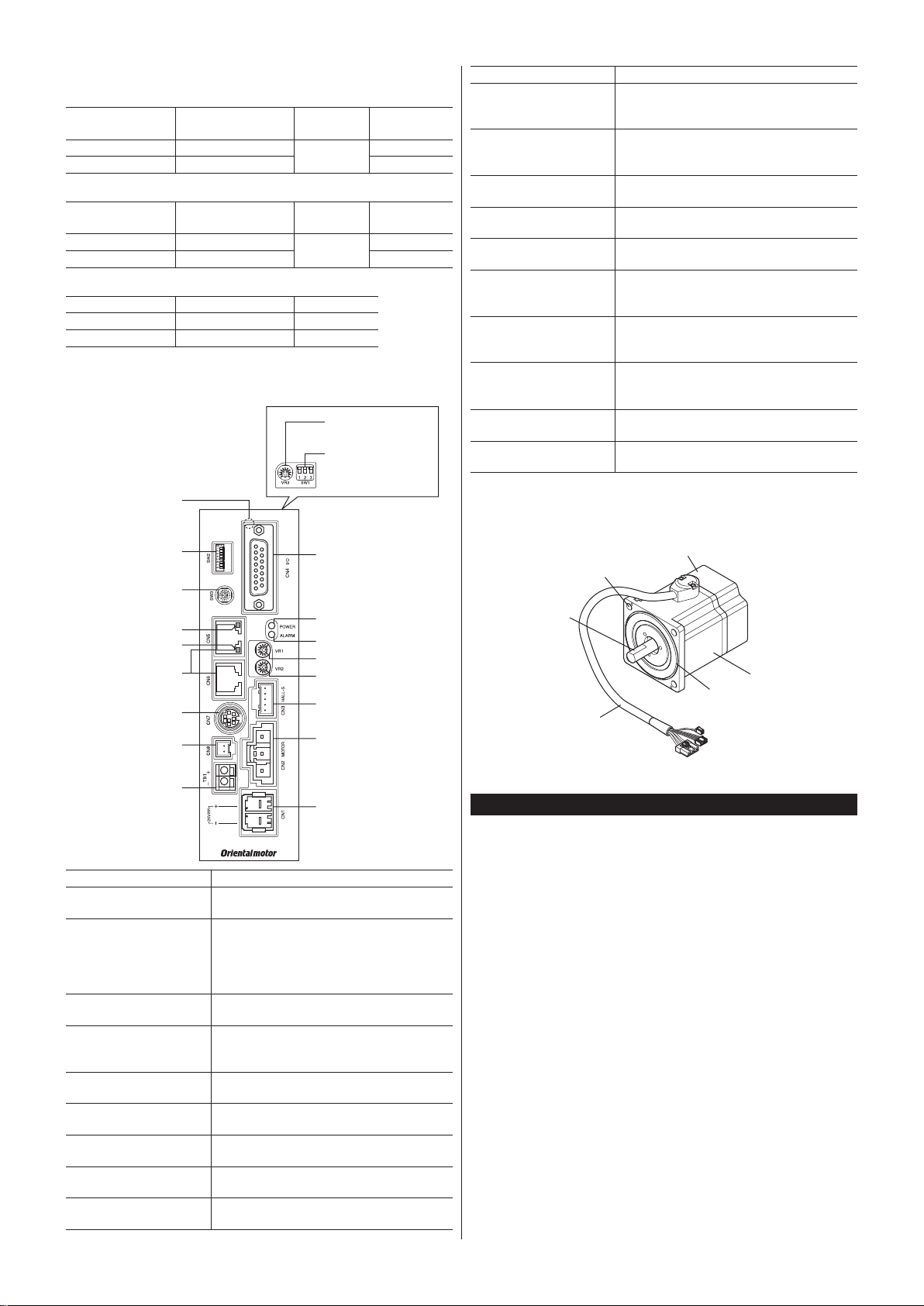
Electromagnetic brake
Output shaft
Combination type parallel shaft gearhead
Unit model Motor model
BLV620KMS-BLVM620KM-GFS
BLV640NMS-BLVM640NM-GFS BLVD40NM
Combination type hollow shaft at gearhead
Unit model Motor model
BLV620KMF-BLVM620KM-GFS
BLV640NMF-BLVM640NM-GFS BLVD40NM
Round shaft type
Gearhead
model
GFS6G
Gearhead
model
GFS6GFR
Driver model
BLVD20KM
Driver model
BLVD20KM
Unit model Motor model Driver model
BLV620KMA-
BLVM620KM-A BLVD20KM
BLV640NMA-BLVM640NM-A BLVD40NM
Names and functions of parts
zDriver
Torque limiting
potentiometer (VR3)
Basic function switch
(SW1)
Mounting hole
(4 locations)
Name Description
I/O signal connector
[CN4]
Basic function switches
(SW1)
Communication
connector [CN7]
Control power supply
input terminal (TB1)
RS-485 communication
connector [CN5/CN6]
Use this connector when using an external
control device (programmable controller)
or inputting a operation command.
Select the setting of the speed response,
external DC voltage and sink logic/source
logic.
Connect the
MEXE02
or
Connect the driver control power supply.
Connect the RS-485 communication
cable.
This LED will illuminate when the driver
C-DAT LED (Green)
is communicating with the master station
properly via RS-485 communication.
This LED will illuminate when a RS-485
C-ERR LED (Red)
communication error occurs with the
master station.
Communication function
switch (SW2)
Address number setting
switch (SW3)
Mounting hole
(4 locations)
Uses when controlling the system via RS-485 communication.
Set the transmission rate, communication
protocol and termination resistor of
RS-485 communication.
This switch set the address number (slave
address) of RS-485 communication.
4 locations on the back surface and side
surface
zMotor
Illustration shows electromagnetic brake type.
OPX-2A
.
Address number setting
C-DAT LED (Green)
C-ERR LED (Red)
RS-485 communication
connector [CN5/CN6]
connector [CN7]
Electromagnetic brake
connector [CN8]
Control power supply
input terminal (TB1)
POWER LED (Green)
ALARM LED (Red)
Internal potentiometer
(VR1)
Acceleration/
deceleration time
potentiometer (VR2)
Torque limiting
potentiometer (VR3)
Main power supply input
terminal [CN1]
Motor power connector
[CN2]
Motor signal connector
[CN3]
Electromagnetic brake
connector [CN8]
switch (SW2)
switch (SW3)
Communication
Name Description
This LED lit while the main power or
control power is input.
This LED will blink when an alarm
generates (a protective function is
triggered). You can check the generated
alarm by counting the number of times the
LED blinks.
Set the motor rotation speed.
Set the acceleration time and deceleration
time for the motor.
Set the torque limiting value of the motor.
Connect the main power supply.
BLV620
: +24 V,
BLV640
Connect the motor power connector.
Connect the motor signal connector.
Connect the electromagnetic brake
connector.
I/O signal connector [CN4]
POWER LED (Green)
ALARM LED (Red)
Acceleration/deceleration
time potentiometer (VR2)
Motor signal connector
[CN3]
Motor power connector
[CN2]
Main power supply input
terminal [CN1]
: +48 V
Mounting hole
(4 locations)
Motor
Pilot section
Motor cable
Electromagnetic brake
connector
Motor signal connecto
Installation
Location for installation
The motor and driver are designed and manufactured for installation in
equipment. Install them in a well-ventilated location that provides easy access
for inspection. The location must also satisfy the following conditions:
Inside an enclosure that is installed indoors (provide vent holes)
Operating ambient temperature
Motor: 0 to +40 °C [+32 to 104 °F] (non-freezing)
Driver: 0 to +40 °C [+32 to 104 °F] (non-freezing)
Operating ambient humidity 85% or less (non-condensing)
Area not exposed to direct sun
Area free of excessive amount of dust, iron particles or the like
Area free of excessive salt
Area that is free of explosive atmosphere or toxic gas (such as sulfuric gas)
or liquid
Area not subject to splashing water (rain, water droplets), oil (oil droplets)
or other liquids
Area not subject to continuous vibration or excessive shocks
Area free of excessive electromagnetic noise (from welders, power
machinery, etc.)
Area free of radioactive materials, magnetic elds or vacuum
Altitude Up to 1000 m (3300 ft.) above sea level
3
Page 4

Installing the combination type
Hexagonal socket
position to a desired
mounting screw
Mounting plate
90° direction.
Hexagonal socket
Note
Do not forcibly assemble the motor and gearhead. Also,
do not let metal objects or other foreign matter enter the
gearhead. The pinion or gear of the motor output shaft
may be damaged, resulting in noise or shorter service life.
Do not allow dust to attach to the pilot sections of the
motor and gearhead. Also, assemble the motor and
gearhead carefully by not pinching the O-ring at the
motor’s pilot section. If the O-ring is crushed or severed,
grease may leak from the gearhead.
zCombination type parallel shaft gearhead
Install the hexagonal socket head
screw in the four mounting holes
head screw
you drilled and tighten the nuts until
no gaps remain between the motor
and mounting plate.
Screw size
Tightening torque
[N·m (lb-in)]
Maximum applicable plate
thickness [mm (in.)]
M8 15.5 (137) 12 (0.47)
When the included hexagonal socket head screw set is used.
Removing/Installing the gearhead
To replace the gearhead or change the cable outlet direction, remove the
screws assembling the gearhead. The gearhead can be removed and the motor
cable position changed to a desired 90° direction.
1. Remove the hexagonal socket head screws (2 pcs.) assembling the motor
and gearhead and detach the motor from the gearhead.
2. Using the pilot sections of the motor and gearhead as guides, install the
gearhead to the motor and tighten the hexagonal socket head screws.
When installing the gearhead, slowly rotate it clockwise/counterclockwise
to prevent the pinion of the motor output shaft from contacting the side
panel or gear of the gearhead.
Safety cover
Safety cover
Hexagonal socket
head screw
Rear
Front
Illustration shows when installing the gearhead
by using its front side as the mounting surface.
Removing/Installing the gearhead
To replace the gearhead or change the cable outlet direction, remove the
screws assembling the gearhead. The gearhead can be removed and the motor
cable position changed to one of three 90° directions.
Note that the motor cable cannot be positioned in the direction where the
cable faces the gearhead output shaft.
1. Remove the hexagonal socket head screws (4 pcs.) attaching the gearhead
and motor and detach the motor from the gearhead.
2. Using the pilot sections of the motor and gearhead as guides, install the
motor to the gearhead and tighten the hexagonal socket head screws.
Install the motor carefully to prevent the pinion of the motor output shaft
from contacting the casing or gear of the gearhead.
Assembly screws
z
A combination type hollow shaft at gearhead can be installed by using either
its front or rear side as the mounting surface. Install the included hexagonal
socket head screw set in the four mounting holes you drilled and tighten the
nuts until no gaps remain between the motor and mounting plate.
Since hexagonal nuts are not included with the product, provide them
separately or drill tapped holes in the mounting plate.
Also, attach the included safety cover to the hollow output shaft on the end
opposite from the one where the load shaft is installed.
[Tightening torque: 0.45 N·m (3.9 lb-in)]
Change the cable
Hexagonal socket head screw
Screw size
Tightening torque
[N·m (lb-in)]
90° direction.
M3 0.6 (5.3)
Combination type hollow shaft at gearhead
Screw size
Tightening torque
[N·m (lb-in)]
Maximum applicable plate
thickness [mm (in.)]
M8 15.5 (137) 12 (0.47)
When the included hexagonal socket head screw set is used.
Hexagonal socket
head screw
Change the cable
position to a desired
Assembly screws
Screw size
Tightening torque
[N·m (lb-in)]
M8 15.5 (137)
Installing the round shaft type
Install the hexagonal socket head screw in
the four mounting holes you drilled and
head screw
tighten the nuts until no gaps remain
between the motor and mounting plate.
Since hexagonal socket head screws are not
included with the product. They must be
provided by the customer.
Screw size
M8
Install the motor to a mounting plate of the following size or larger, so that
the motor case temperature will not exceed 90 °C (194 °F).
Unit model
BLV620
BLV640
Size of mounting plate
[mm (in.)]
200×200 (7.87×7.87) 5 (0.2)
250×250 (9.84×9.84) 6 (0.24)
Thickness
[mm (in.)]
Material
Aluminum
4
Page 5

Installing a load of the combination type parallel
Fixed screw
Transmission
+0.033
0
+0.0013
0
0
-
0.021
0
-
0.0008
Parallel key
Hexagonal socket
Parallel key
Hexagonal socket
SpacerSpacer
gearhead or round shaft type
When installing a load on the motor or the gearhead, align the center of the
motor output shaft or the gearhead output shaft with the center of the load
shaft.
Note
When coupling the motor or the gearhead with a load, pay
attention to centering, belt tension, parallelism of pulleys,
etc. Also, rmly secure the tightening screws of the
coupling or pulleys.
When installing a load, do not damage the motor output
shaft (gearhead output shaft) or bearing. Forcing in the
load by driving it with a hammer, etc., may break the
bearing. Do not apply any excessive force to the output
shaft.
Do not modify or machine the output shaft of the motor or
gearhead. Doing so may damage the bearings, leading to
damage to the motor or gearhead.
zStepped load shaft
Install each hexagonal socket head screw over a retaining ring, spacer, at
washer and spring washer and securely ax the ring.
Hexagonal socket
head screw
Spring washer
Flat washer
Spacer
Retaining ring
Stepped
load shaft
Retaining ring
Load shaft
ØD
Flat washer
head screw
zOutput shaft shape
Combination type parallel shaft gearhead
A key groove is provided on the output shaft of each combination type
parallel shaft gearhead. Form a key groove on the load side and ax the load
using the included parallel key. [Parallel key dimension: 6 mm (0.236 in.)]
Round shaft type
A at section is provided on the motor output shaft of each round shaft type.
Apply a double-point screw, etc., at the at section to securely ax the load
and prevent it from spinning.
zHow to install a load
Using a coupling
Align the centerline of the motor or gearhead output shaft with the centerline
of the load shaft.
Using a belt
Adjust the motor or gearhead output shaft to lie parallel with the load shaft,
and form right angles between the output shaft/load shaft and the line
connecting the centers of both pulleys.
Using a gear
Adjust the motor or gearhead output shaft to lie parallel with the gear shaft,
and allow the output shaft to mesh correctly with the centers of the gear teeth.
When using the output axis tip screw
hole of a gearhead
Use a screw hole [M6; Eective depth
parts
Spacer
12 mm (0.47 in)] provided at the tip of
the output shaft as an auxiliary means
for preventing the transfer mechanism
from disengaging.
Screw
Parallel key
Hollow output shaft
Spring washer
Spacer
zNon-stepped load shaft
Install each hexagonal socket head screw over a retaining ring, spacer, at
washer and spring washer and securely ax the ring. Also insert a spacer on
the load shaft side.
Hexagonal socket
head screw
Spring washer
Flat washer
Spacer
Retaining ring
Spacer
Retaining ring
Hollow output shaft
Load shaft
Load shaft
Parallel key
Flat washer
head screw
Spring washer
Installing a load of the combination type hollow shaft
at gearhead
If the motor is subject to a strong impact upon instantaneous stop or receives
a large radial load, use a stepped load shaft.
Apply grease (molybdenum disulde grease, etc.) on the
Note
surface of the load shaft and inner walls of the hollow output
shaft to prevent seizure.
zRecommended load shaft installation dimensions
[Unit: mm (in.)]
Inner diameter of
hollow shaft (H8)
Ø25
(0.9843
Applicable screw Spacer thickness
M8
The value in [ ] is the thickness when installing the gearhead by using its
rear side as the mounting surface.
Recommended diameter
of load shaft (h7)
)
Ø25
(0.9843
6 (0.24)
[3 (0.12)]
Nominal diameter of
)
Outer diameter of stepped
shaft (ØD)
retaining ring
Ø25 (0.98)
40 (1.57)
Permissible radial load and permissible axial load
Failure due to fatigue may occur when the motor or gearhead
Note
bearings and output shaft are subject to repeated loading by
a radial or axial load that is in excess of the permissible limit.
zCombination type parallel shaft gearhead
Gear ratio
Distance from tip of gearhead output
shaft and permissible radial load
[N (lb.)]
Permissible
axial load
10 mm (0.39 in.) 20 mm (0.79 in.)
5 to 20
30, 50
100, 200
The values assume a rated speed of 3000 r/min or below.
550 (123)
<500 (112)>
1000 (220)
<900 (200)>
1400 (310)
<1200 (270)>
800 (180)
<700 (157)>
1250 (280)
<1100 (240)>
1700 (380)
<1400 (310)>
200 (45)
300 (67)
400 (90)
The values in < > are based on a rated speed of 4000 r/min.
[N (lb.)]
5
Page 6

DIN rail
mounting plate
A
• When using side surface A
Combination type hollow shaft at gearhead
z
Distance from gearhead mounting
Gear ratio
surface and permissible radial load
[N (lb.)]
10 mm (0.39 in.) 20 mm (0.79 in.)
BLV640
5 (
The values assume a rated speed of 3000 r/min or below.
10
15, 20
30 to 100
only)
1230 (270)
<1130 (250)>
1680 (370)
<1550 (340)>
2040 (450)
<1900 (420)>
1070 (240)
<990 (220)>
1470 (330)
<1360 (300)>
1780 (400)
<1660 (370)>
Permissible
axial load
[N (lb.)]
800 (180)
The values in < > are based on a rated speed of 4000 r/min.
zRound shaft type
Distance from tip of motor output shaft
and permissible radial load [N (lb.)]
10 mm (0.39 in.) 20 mm (0.79 in.)
Permissible axial load
[N (lb.)]
197 (44) 221 (49) 25 (5.6)
Installing the driver
The driver is designed so that heat is dissipated via air convection and
conduction through the enclosure. Install the driver on a at metal plate
having excellent vibration resistance and heat conductivity.
When two or more drivers are to be installed side by side, provide 20 mm (0.79
in.) and 25 mm (0.98 in.) clearances in the horizontal and vertical directions,
respectively.
Note
Install the driver in an enclosure whose pollution degree is
2 or better environment, or whose degree of protection is
IP54 minimum.
Do not cover the radiation vent of the driver.
Do not install any equipment that generates a large
amount of heat or noise near the driver.
If the ambient temperature of the driver exceeds 40 °C
(104 °F), revise the ventilation condition or force-cool the
area around the driver using a fan.
zInstalling with screws
Ax the driver through the mounting holes using two screws (M4: not included).
When mounting in vertical direction [Unit: mm (in.)]
• When using
B
side surface A
Ø4.5
(0.177)
147 (5.79)
• When using
side surface B
147 (5.79)
2×Ø4.5
(0.177)
When mounting in horizontal direction [Unit: mm (in.)]
147 (5.79)
A
Ø4.5 (0.177)
• When using side surface B
147 (5.79)
B
2×Ø4.5 (0.177)
Setting
Basic function switch (SW1)
zMounting to DIN rail
When mounting the driver to a DIN rail, use the DIN rail mounting plate
(sold separately) and attach it to a 35 mm (1.38 in.) wide DIN
PADP03
rail. After installation, x the both sides of the driver with the end plate (not
included).
Hook
DIN rail
Note
Mounting hole
(M3-4 locations)
Mounting screw (included)
Tightening torque: 0.3 to 0.4 N·m (2.6 to 3.5 lb-in)
Do not use the mounting holes (M3, four locations) for
DIN lever
the DIN rail mounting plate for any purpose other than
securing the DIN rail mounting plate.
Be sure to use the included screws when securing the
DIN rail mounting plate. The use of screws that would
penetrate 3 mm (0.12 in.) or more through the surface of
the driver may cause damage to the driver.
6
Communication function
switch (SW2)
Address number setting
switch (SW3)
Basic function (SW1)
SW1 Description Setting range
ON: High response mode
1 Speed response
OFF: Regenerative power suppression
mode (Factory setting)
2 External DC voltage
Sink logic/Source
3
logic
Communication function (SW2)
ON: 0 to 10 V
OFF: 0 to 5 V (Factory setting)
ON: Source logic
OFF: Sink logic (Factory setting)
Set when controlling the system via RS-485 communication.
SW2 Description Factory setting
1
Transmission rate
2
3
4 Not used
5 Communication protocol
OFF
6 Not used
7 Termination resistor
8 Extending the address number
Address number setting (SW3)
Set the address number using the SW3 and No. 8 of the communication
function switch (SW2).
Factory setting : 0
Page 7

Connection
30 VDC or less
53 VDC or less
30 VDC or less
53 VDC or less
External DC voltage
(Not to exceed the
voltage selected by
SW1-No.2)
10 mm
(0.39 in.)
connector
Lead wire
Lever
Connection example (Sink logic)
3.3 kΩ
0 V
0 V
Driver
+15 V
0 V
CN2
CN3
CN8
CN4
SPEED-OUT
6
IN-COM
5
WNG (+)
14
WNG (
7
ALARM-OUT1 (+)
15
ALARM-OUT1 (
8
Motor power connector
Motor signal connector
Electromagnetic brake connector
∗1
∗2
-
)
∗2
-
)
BLV620:
10 mA or less
BLV640:
10 mA or less
BLV620:
100 mA or less
BLV640:
100 mA or less
+
-
FWD
REV
M0
VH
VM
VL
CN1
+
-
CN4
1
2
3
4
9
10
5
13
12
11
DC power supply
BLV620: 24 VDC±10%
BLV640: 48 VDC±10%
STOP-MODE
VM
VL
ALARM-RESET
MB-FREE
IN-COM
External potentiometer
PAVR-20KZ (accessory)
3
2
1
*1 Be sure to suppress the current value to 10 mA or less. Connect a current-limiting resistor if the current exceeds this specied value.
*2 Be sure to suppress the current value to 100 mA or less. Connect a current-limiting resistor if the current exceeds this specied value.
Connecting the power supply
zConnecting method
1. Strip the insulation cover of the lead wire by
10 mm (0.39 in.).
Applicable lead wire: AWG16 to 10
(1.25 to 6 mm
2. Insert each lead wire into the CN1 connector
and tighten the screw.
Tightening torque: 0.7 to 0.8 N·m
(6.1 to 7.0 lb-in)
3. Insert the CN1 connector into CN1.
Hold the green part of the CN1 connector, and insert it into the CN1 on the
driver. Push the lever (orange) into the CN1 on the driver before pulling
out the CN1 connector.
Note
2
)
CN1
Supplying the power in a state
where the lever (orange) is pushed
in may cause damage to the driver
due to connection failure.
When connecting, check the indication of the driver case and
pay attention to the polarity of the power supply. Reversepolarity connection may cause damage to the driver.
Do not wire the power supply cable of the driver in the
same cable duct with other power line or motor cable.
Doing so may cause malfunction due to noise.
When cycling the power or plugging/unplugging the connector,
turn o the power and wait for the POWER LED to turn o.
When turning on or o the power supply using a
mechanical contact (breaker, electromagnetic switch, relay,
etc.), do so only the positive side (+) of the power supply
using the mechanical contact. Turning on or o the positive
side (+) and the negative side (-) of the power supply
simultaneously using a mechanical contact may cause
damage to the control circuit or peripheral equipment.
zApplicable crimp terminal
If crimp terminals are used, select the following terminals.
Manufacturer Model Applicable lead wire
PHOENIX CONTACT
GmbH & Co. KG
AI 1,5-10 AWG16 (1.25 mm
AI 2,5-10 AWG14 (2 mm
AI 4-10 AWG12 (3.5 mm
2
)
2
)
2
)
zRecommended power supply capacity
Unit model Input power supply voltage Current capacity
BLV620
BLV640
Connecting the motor and driver
24 VDC±10% 800 W or more
48 VDC±10% 1 kW or more
Connect the motor cable to the motor power connector (CN2) and motor
signal connector (CN3) of the driver. When using a electromagnetic brake
motor, also connect to the electromagnetic brake connector (CN8).
To expand connection between the motor and driver, use the included
connection cable. Connection can be extended to a maximum of 3.5 m
(11.5 ft.).
Have the connector plugged in securely. Insecure connection
Note
may cause malfunction or damage to the motor or driver.
Connecting the I/O signals
Connecting the I/O signals to the I/O connector (CN4). Keep the wiring
distance as short as possible [less than 2 m (6.6 ft.)] to suppress the eect of
noise.
Note
The connector for connecting the I/O signals are not
included. Please prepare as follows;
· D-Sub connector (15-pin)
· Hood (the screw: No.4-40UNC)
Wire the signal cable at a distance of 100 mm (3.94 in.) or
more from the inductive load (electromagnetic relay etc.),
power supply or power cable (motor cable etc.).
7
Page 8

T
8:30
7:30
www
Schiessstraße 44, 40549 Düsseldor
T
www
T
www
T
www
T
www
T
www
• Please contact your nearest Oriental Motor oce for further information.
4-8-1Higashiueno
Japan
T
www
Tel:+852-2427-9800
zI/O connector function table
1827
915 1014
This gure is the CN4 connector
viewed from the driver front side.
Pin
Signal
No.
1
2 X1 REV
Input
3 X2 STOP-MODE
type
Terminal
name
X0 FWD
Signal name Description
The motor turns in the
clockwise direction.
The motor turns in the
counterclockwise direction.
Select instantaneous stop
or deceleration stop.
Select the internal
4 X3 M0
potentiometer or external
potentiometer (external DC
voltage).
5 GND C0 IN-COM −
30 pulses are output with
6
Output
7 Y1− WNG (−) −
8 Y0−
9
Y2 SPEED-OUT
each revolution of the
motor output shaft.
ALARM-OUT1
(−)
X4 ALARM-RESET Alarms are reset.
Select how the
Input
10 X5 MB-FREE
electromagnetic brake
would operate when the
motor stops.
11
Analog
12 VM VM
input
VL VL
13 VH VH
14
Output
15 Y0+
Y1+ WNG (+)
ALARM-OUT1
(+)
External speed setting
input; Set the speed of
the external potentiometer
(external DC voltage).
This signal is output when
a warning generates.
This signal is output
when an alarm generates
(normally closed).
Electromagnetic brake type only.
Overview of the operation
Basic operation
With the
MANUAL Basic Function for details.
Speed setting
Internal potentiometer, external potentiometer, external DC voltage
Running/stopping the motor
Run/stop the motor by inputting operation control signals.
Setting the acceleration time and deceleration time
You can set the acceleration time and deceleration time for starting and
stopping.
2-speed operation
Operation can be performed at two speeds through use of both the internal
potentiometer and external potentiometer (external DC voltage).
Multi-motor control
A single external potentiometer (external DC voltage) can be used to set the
same speed for multiple motors.
If the support software
is used, the function can be extended so that the digital setting of the rotation
speed and torque limiting value, the setting of parameters, and various
monitors can be performed.
8
Series, you can perform following operations. Refer to USER
BLV
MEXE02
or the data setter
OPX-2A
−
(sold separately)
Operation via communication
zRS-485 communication
Operation data and parameters can be set and operation commands can be
input from the host controller via RS-485 communication. The protocol
for the RS-485 communication is the Modbus protocol. Refer to the USER
MANUAL RS-485 Communication Mode for details.
zNetwork converter
This product can be used via various network when connecting to a network
converter (sold separately). Refer to the operating manual of the network
converter for details.
Network converter model Supported network
NETC01-CC
NETC01-M2/M3
NETC01-ECT
CC-Link
MECHATROLINK
EtherCAT
Refer to the USER MANUAL for details on the product.
For the USER MANUAL, contact your nearest Oriental
Motor sales oce or download from Oriental Motor Website
Download Page.
Unauthorized reproduction or copying of all or part of this manual is
prohibited.
Oriental Motor shall not be liable whatsoever for any problems relating
to industrial property rights arising from use of any information, circuit,
equipment or device provided or referenced in this manual.
Characteristics, specications and dimensions are subject to change
without notice.
While we make every eort to oer accurate information in the manual,
we welcome your input. Should you nd unclear descriptions, errors or
omissions, please contact the nearest oce.
is a registered trademark or trademark of Oriental Motor
Co., Ltd., in Japan and other countries.
Modbus is a registered trademark of the Schneider Automation Inc.
CC-Link is a registered trademark of the CC-Link Partner Association.
MECHATROLINK is a registered trademark of the MECHATROLINK
Members Association.
EtherCAT® is registered trademark and patented technology, licensed by
Beckho Automation GmbH, Germany.
© Copyright
ORIENTAL MOTOR CO., LTD. 2011
Published in June 2019
echnical Support Tel:(800)468-3982
A.M. to 5:00 P.M., P.S.T. (M-F)
A.M. to 5:00 P.M., C.S.T. (M-F)
.orientalmotor.com
el:+55-11-3266-6018
.orientalmotor.com.br
echnical Support Tel:00 800/22 55 66 22
.orientalmotor.de
el:01256-347090
.oriental-motor.co.uk
el:01 47 86 97 50
.orientalmotor.fr
el:02-93906346
.orientalmotor.it
,Taito-ku,Tokyo 110-8536
el:03-6744-0361
.orientalmotor.co.jp
f, Germany
Singapore
Tel:1800-8420280
www.orientalmotor.com.sg
Tel:1800-806161
www.orientalmotor.com.my
Tel:1800-888-881
www.orientalmotor.co.th
Tel:+91-80-41125586
www.orientalmotor.co.in
Tel:0800-060708
www.orientalmotor.com.tw
Tel:400-820-6516
www.orientalmotor.com.cn
Korea
Tel:080-777-2042
www.inaom.co.kr
Hong Kong Branch
 Loading...
Loading...