

Page 1
ORACLE E SERIES
Shelf Mount
S1E, S1EC, S2E, S2EC
Enhanced Loop Monitor
Operations Manual
THIS MANUAL CONTAINS TECHNICAL INFORMATION FOR
THE ORACLE S1E(S), S2E(S), S1EC(S), S2EC(S)
REVISION: APRIL 2017
pn 888-0351-001
Page 2

THE ORACLE LOOP MONITORS ARE DESIGNED AND MANUFACTURED IN THE USA
BY EBERLE DESIGN INC.
PHOENIX, ARIZONA
AN ISO 9001:2008 REGISTERED COMPANY
INFORMATION CONTAINED HEREIN IS PROPRIETARY TECHNICAL INFORMATION
OF EBERLE DESIGN INC. PUBLICATION, REPRODUCTION OR USE IN WHOLE OR
PART IS NOT PERMITTED EXCEPT UNDER TERMS AGREED UPON IN WRITING.
DEFLECTOMETER IS A TRADEMARK OF EBERLE DESIGN INC.
©COPYRIGHT 2017 EDI.
Page 3

Table of Contents
Section 1 General ............................................................................................................. 1
1.1 Description ............................................................................................................. 1
Section 2 Functions ......................................................................................................... 2
2.1 General Functions .................................................................................................. 2
2.1.1 Front Panel Controls ..................................................................................... 2
2.1.2 Sensitivity...................................................................................................... 2
2.1.3 Loop Frequency ............................................................................................ 2
2.1.3.1 Frequency Stability Graph.................................................................... 2
2.1.3.2 Noise Filter .......................................................................................... 3
2.1.4 Sensor Modes (Oracle EC Series) ................................................................ 3
2.1.4.1 Probe Mode (Oracle EC Series)........................................................... 3
2.1.4.2 Rail Mode (Oracle EC Series) .............................................................. 3
2.1.5 Presence / Pulse Modes ............................................................................... 3
2.1.6 Delay and Extend Function ........................................................................... 4
2.1.6.1 Call Delay Timer .................................................................................. 4
2.1.6.2 Call Extension Timer ............................................................................ 4
2.1.6.3 Timer Control Inputs ............................................................................ 4
2.1.7 Channel Display ............................................................................................ 5
2.1.7.1 Count down timers ............................................................................... 5
2.1.7.2 Loop frequency Display ....................................................................... 5
2.1.7.3 Loop Inductance Display ...................................................................... 5
2.1.7.4 Vehicle Count Display (Oracle EC Series ) .......................................... 5
2.1.7.5 DEFLECTOMETER® Pie Graph ........................................................... 5
2.1.7.6 DEFLECTOMETER® Streaming Graph ................................................ 5
2.1.8 Event Log...................................................................................................... 5
2.1.9 Channel ID .................................................................................................... 6
2.1.10 Paired Channel Functions ........................................................................... 6
2.1.10.1 3rd Car Mode ...................................................................................... 6
2.1.10.2 Directional Logic ................................................................................ 6
2.1.11 Set Factory Default Settings ........................................................................ 6
2.2 Operational ............................................................................................................ 7
2.2.1 Channel Output Control ................................................................................ 7
2.2.2 LCD Display .................................................................................................. 7
2.2.3 High Intensity Color-Coded LED Indicators ................................................... 7
2.2.4 Loop Fault Monitor ........................................................................................ 7
2.3 Vehicle Counting (Oracle S1EC / S2EC) ................................................................ 8
2.3.1 Vehicle Counting (AccurateCount) Display .................................................... 8
2.3.2 Vehicle Counting (AccurateCount) Mode....................................................... 8
2.3.3 Vehicle Counting (AccurateCount) Loop Configurations ................................ 8
Section 3 Programming ................................................................................................... 9
3.1 Installation .............................................................................................................. 9
3.1.1 Main Menu .................................................................................................... 9
3.2 SET UP Menu ........................................................................................................ 9
3.2.1 Sensitivity...................................................................................................... 9
3.2.1.1 Adjusting sensitivity using the DEFLECTOMETER® ............................. 9
3.2.1.2 Adjusting sensitivity without using the DEFLECTOMETER® ................10
3.2.2 Frequency ....................................................................................................10
3.2.3 Paired Channel Modes (S2E, S2EC only) ....................................................10
3.2.3.1 3rd Car mode .......................................................................................10
3.2.3.2 Directional Logic mode .......................................................................11
3.2.4 Operational Modes .......................................................................................11
3.2.4.1 Presence Mode...................................................................................11
3.2.4.2 Timing .................................................................................................11
Page 4

3.2.5 Channel ID ...................................................................................................12
3.3 Vehicle Counting (Oracle EC Series) .....................................................................12
3.3.1 Counting Type (AccurateCount) ...................................................................12
3.3.2 Vehicle Counting Output (AccurateCount) ....................................................13
3.4 Display Modes .......................................................................................................13
3.5 Loop Fault Monitor ................................................................................................13
3.6 Event Log ..............................................................................................................13
3.7 System Menu ........................................................................................................14
3.7.1 Run Menu Item ............................................................................................14
3.7.2 System Info Menu Item ................................................................................14
3.7.3 Temperature and Voltage Menu Item ...........................................................14
3.7.4 LCD Display Heater Menu Item ....................................................................14
3.7.5 Options Menu Item (Oracle EC Series) ........................................................14
3.7.5.1 Probe Gap Menu Item .........................................................................14
3.7.5.2 Stream Menu Item (Oracle ECX Series) .............................................14
Section 4 Theory of Operation ........................................................................................15
4.1 General .................................................................................................................15
4.2 Trouble Analysis ....................................................................................................15
4.2.1 LCD or LED not lit - detector does not operate or have power ......................15
4.2.2 Fault and Detect LEDs flashing ....................................................................15
4.2.3 Detector does not detect all vehicles ............................................................16
4.2.4 Detector is noisy/chatters/gives false detect CALLs .....................................16
4.2.5 Poor Loop connections ................................................................................16
4.2.6 Poor Loops ..................................................................................................16
Section 5 Loop Installation .............................................................................................17
5.1 Loop Design ..........................................................................................................17
Section 6 Specifications .................................................................................................19
6.1 Mechanical ............................................................................................................19
6.2 Environmental .......................................................................................................19
6.3 Electrical ...............................................................................................................19
6.4 Loop Inductance (Tuning) Range ..........................................................................19
6.4.1 Grounded Loop Operation............................................................................19
6.4.2 Lead-in Length .............................................................................................19
6.5 Loop Input (Lightning Protection) ...........................................................................19
6.6 Response Timing ..................................................................................................20
6.6.1 ORACLE S1E (S1EC) ..................................................................................20
6.6.2 ORACLE S2E (S2EC) ..................................................................................20
6.7 Connector Pin Assignments ..................................................................................20
6.7.1 ORACLE S1E(S) and S1EC(S) Pin Assignment ...........................................20
6.7.2 ORACLE S2E(S) Pin Assignment ................................................................21
6.7.3 ORACLE S2EC(S) Pin Assignment ..............................................................21
Page 5
ORACLE S1E and ORACLE S2E
Operations Manual
Section 1
General
1.1 DESCRIPTION
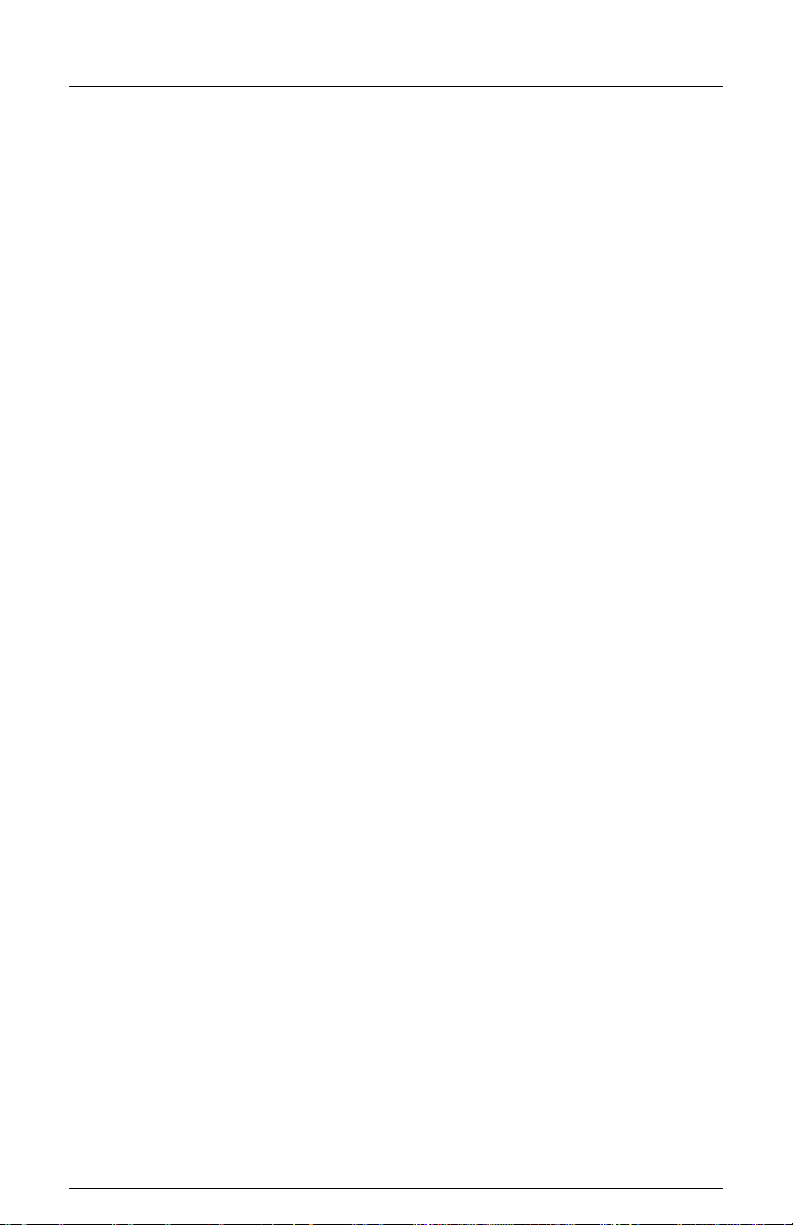
The ORACLE S1E and S2E Enhanced Loop Monitor series is a full featured one and two
channel inductive loop vehicle detector conforming to Nema TS1-1989 (R2005)
requirements.
The ORACLE features a front panel mounted multi-line graphic Liquid Crystal Display
(LCD) which assists the user in setting up the unit and can display operational parameters
and diagnostic information for all channels simultaneously. A built-in heater is provided to
enhance the LCD performance for cold temperature operation. An easy to use natural
language menu structure guides the operator through the set up process and features plain
English prompts on the LCD to describe functions and parameters. Two toggle switches
per channel are used to navigate through the menus and make data entries as required. All
programmed settings are stored in non-volatile memory. If power is disrupted or a detector
reset occurs the programmed settings will not be altered.
Loop diagnostic capabilities incorporated within the ORACLE enables the diagnosis of
shorted or open circuit loops and sudden inductance changes exceeding 25 percent of the
nominal value. For each channel, the type of fault is displayed on the LCD and signified by
the fault indicator emitting a different flash sequence. The last 25 loop faults are stored in
an event buffer and can be reviewed in the Event Log. This information can greatly assist
the user in the diagnosis of loop related problems.
The front panel LCD provides the Frequency, Inductance, and Count (EC only) display
views. The Loop Frequency, ∆L/L%, Loop Inductance, DEFLECTOMETER
DEFLECTOMETER
®
Numeric Value, DEFLECTOMETER® Streaming Graph, Frequency
Stability Graph, Sensitivity Level, Mode of Operation, and Vehicle Counting Accumulator
can be viewed on the front panel LCD.
The ORACLE offers a unique and very useful feature called the DEFLECTOMETER
DEFLECTOMETER
determining the optimum sensitivity setting by showing the change in inductance caused by
traffic moving over the loop. The DEFLECTOMETER
®
display allows you to use visual and numeric aids to assist in
®
aids in setting the detector channels
quickly and easily to the most optimum sensitivity level to ensure trouble-free detection of
all vehicles, including motorcycles and high bed vehicles (see section 3.2.1). Sensitivity can
be adjusted in real-time with a vehicle continuously occupying the detection zone.
The CALL outputs are fail-safe relays and conform to TS1-1989 standards. Solid State
outputs may be requested as an option (Model ORACLE S1ES or ORACLE S2ES). The
ORACLE detectors will tune to any loop and lead-in inductance between 20 and 2500
microHenries and will provide satisfactory operation with lead-ins as long as 5000 feet.
Delay, Extend and User-Defined timing functions are included with the ORACLE Series II.
The ORACLE S1EC and S2EC add the AccurateCount (Vehicle Counting) feature that
enables vehicles to be counted with vehicle totals displayed on the LCD panel. The
AccurateCount output also provides a secondary output for each channel for every vehicle
in the loop zone at the same time. The unit can be programmed on each channel for one
loop to eight loops connected together in series.
®
Pie Graph,
®
. The
Eberle Design Inc. Page 1
Page 6
ORACLE S1E and ORACLE S2E
Sensitivity
∆L/L
Sensitivity
∆L/L
20
0.0035 %
10
0.113 %
19
0.005 %
9 0.160 %
18
0.007 %
8 0.226 %
17
0.010 %
7 0.320 %
16
0.014 %
6 0.453 %
15
0.020 %
5 0.640 %
14
0.028 %
4 0.905 %
13
0.040 %
3 1.280 %
12
0.057 %
2 1.810 %
11
0.080 %
1 2.560 %
Operations Manual
Section 2 Functions
2.1 GENERAL FUNCTIONS
2.1.1 FRONT PANEL CONTROLS
Two high-reliability sealed front panel toggle switches for each channel are used to select
operational and display settings. One switch is designated “MENU (Back/Select)” and is
used to accept the setting displayed and to move to the next menu item or go back to the
previously displayed screen. The second switch is designated “SCROLL (Up/Down)” and
allows you to move through each selected menu.
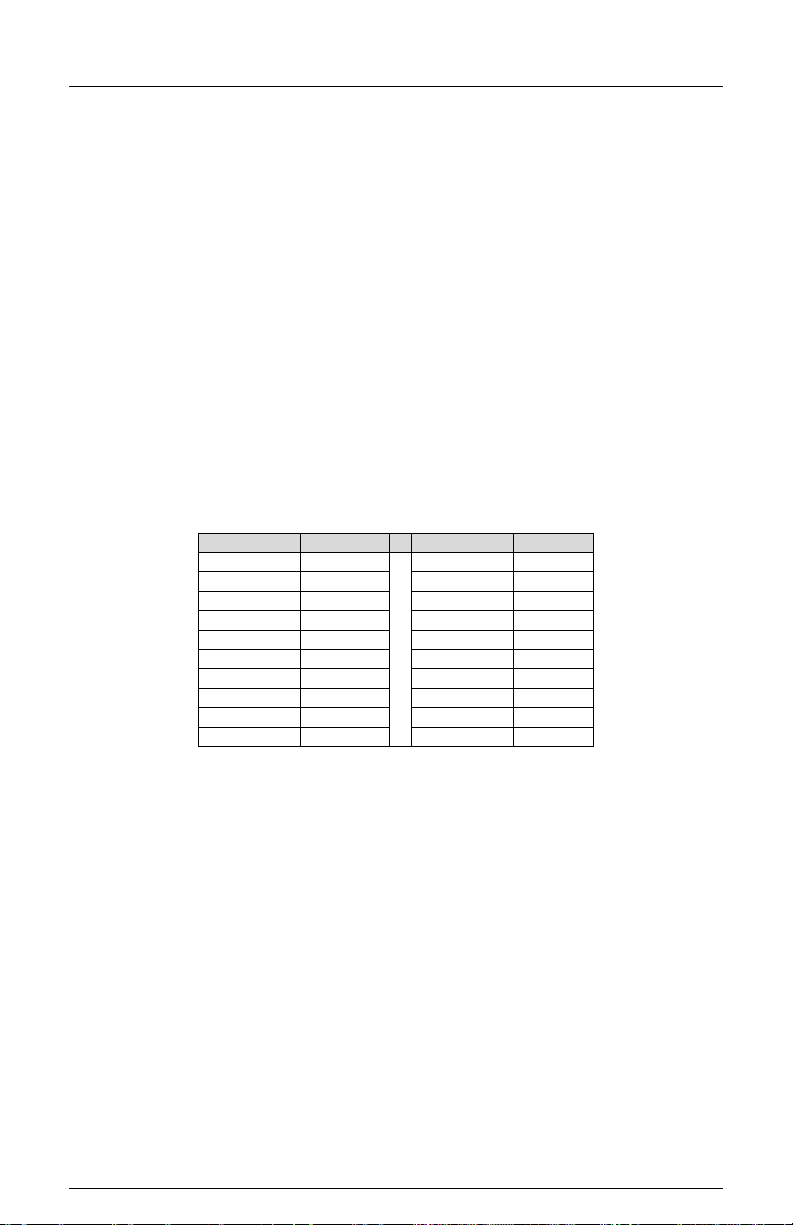
2.1.2 SENSITIVITY
There are twenty selectable sensitivity levels per channel. The DEFLECTOMETER
Graph, DEFLECTOMETER
®
Numeric Value and a DEFLECTOMETER® Streaming Graph,
make it easy to set-up and optimize sensitivity for each channel. Sensitivity can be selected
from the “SET UP” or “QUIK SET” menus, to optimize vehicle detection on varying loop and
lead-in configurations. Sensitivity is stated in terms of ∆L/L [i.e. as the minimum percentage
change in the total inductance (loop plus lead-in) to which the unit will respond at the given
level.] See section 3.2.1.
®
Pie
2.1.3 LOOP FREQUENCY
The LCD screen displays the actual loop frequency to help avoid interference which may
occur when loops connected to different detectors are located adjacent to one another.
One of eight (8) settings (normally in the range of 20 to 60 kilohertz) may be selected via
the “SET UP” or the “QUIK SET” menu options. It is recommended that adjacent loops
have a frequency separation of at least 5 KHz.
2.1.3.1 FREQUENCY STABILITY GR APH
In the Frequency display mode the LCD screen also displays a frequency stability graph
and Q∆f value that allows you to analyze each frequency level to ensure proper selection of
frequency levels. The XY graph displays detector frequency samples with respect to the
reference. The channel reference is in the center of the graph. A variation from the center
of the graph depicts frequency instability on the channel.
Basically a thin smooth graph offers a more optimum frequency selection over a thick or
uneven line. For optimal operation, select the frequency level with the lowest value of Q∆f.
For values of Q∆f higher than 15-20, the Noise Filter option (see Section 2.1.3.2) should be
considered.
Eberle Design Inc. Page 2
Page 7

ORACLE S1E and ORACLE S2E
Operations Manual
2.1.3.2 NOISE FILTER
For installations where the effects of cross-talk or resulting frequency instability are higher
than normal, additional noise filtering can be applied. Three levels of filtering are provided;
Normal, Maximum, and Off. The Maximum level is intended for installations with a high
level of cross-talk between loops where the frequency separation between adjacent loops
is not adequate for reliable operation. Setting the filter mode to Off is intended only for high
speed applications where minimum response time delay is required.
2.1.4 SENSOR MODES (ORACLE EC SERIES)
The Oracle EC series support three different inductive loop types; normal loop, point probe,
and rail mode. The Normal sensor mode is used with conventional inductive loops. The
Probe mode and Rail mode are for special applications.
2.1.4.1 PROBE MODE (ORACLE EC SERIES)
This mode is intended to support the use of point probe type micro sensors. A probe type
micro sensor is a transducer that converts changes in the vertical component of the earth’s
magnetic field to changes in inductance. The resulting change in inductance can then be
sensed by the Oracle EC series detector. Note that when operating in the Probe mode, the
50% pie graph level is reported as a value of 8 instead of 10 (see 2.1.7.5). A gap setting is
also provided for optimizing the distinction between closely spaced cars and large trucks,
see 3.7.5.1.
2.1.4.1.1 PROBE MODE THRESHOLD
The Probe Mode Threshold allows the user to adjust the hysterisis value for the call to nocall threshold. The default value is 20% of the call strength which is suitable for most probe
applications.
2.1.4.2 RAIL MODE (ORACLE EC SERIES)
This mode is intended to support the use of inductive loops in a light rail application. Rail
applications often produce residual effects on a train car exit from the detection zone that
can cause the detector to remain in the call state. In this case the loop inductance does not
immediately return to the tuned reference value for a short time period.
2.1.4.2.1 RAIL MODE THRESHOLD
The Rail mode allows the user to adjust the hysterisis value for the call to no-call threshold.
The default value is 20% of the call strength which is suitable for most rail applications.
2.1.5 PRESENCE / PULSE MODES
For each channel, a Presence or Pulse output mode may be selected via the “SET UP”
menu. If Presence mode is selected then a choice of Short, Long, or User defined presence
can be selected (see 3.2.4.1). Short Presence is defined as 30 minutes and Long Presence
is defined as 120 minutes. In User Defined mode, a user setting can be applied. On the
expiration of short or long presence time a detect CALL will be reset. In User defined mode,
the detect CALL can be selected to reset on timer expiration or at the next End-Of-Green
(EOG) signal after the expiration of the timer. The green signal is applied to the Timer
Control input via the edge card connector.
In Pulse mode, a 125 ms ± 25 ms width pulse will be output for each vehicle entering the
loop. The pulse length can be programmed from 125 ms to 60 minutes.
Eberle Design Inc. Page 3
Page 8

ORACLE S1E and ORACLE S2E
Operations Manual
2.1.6 DELAY AND EXTEND FUNCTION
2.1.6.1 CALL DELAY TIMER
For each channel, a delay time of 0.1 seconds to 5 minutes can be set via the “SET UP”
menu. Call Delay time starts counting down when a vehicle enters the loop detection area.
Delay time can be overridden by a green signal at the Timer Control input.
2.1.6.2 CALL EXTENSION TIMER
For each channel, an extension time of 0.1 seconds to 1 minute can be set via the “SET
UP” menu. Call Extension time starts counting down when the last vehicle clears the loop
detection zone. Any vehicle entering the loop detection zone during the Extension time
period causes the channel to return to the DETECT state. The Extension timer can be
enabled upon the following options:
2.1.6.2.1 EXTEND ALWAYS MODE (ALWAYS)
When a vehicle leaves the loop zone and the loop zone becomes vacant, then the extend
timer will be enabled and CALL output will be maintained until the timer times out.
2.1.6.2.2 EXTEND ON-GREEN MODE (ONGREEN)
If the Timer Control input is inactive and the loop becomes vacant after a vehicle exits, then
the Extend timer will not be enabled and the CALL output will be cleared. When the Timer
Control input is active and the loop becomes vacant after a vehicle exits, then the Extend
timer will be enabled and the CALL output will be maintained until the timer times out. While
the timer is running, the DETECT LED will flash 4 times a second. If the timer is running
and the Timer Control input becomes inactive, the timer will be disabled and the CALL will
be cleared. If the timer is running and a vehicle is detected, the timer will be disabled and
the CALL maintained until the loop again becomes vacant, at which point the extend
process repeats.
2.1.6.2.3 EXTEND DISCONNECT (DISCNNCT)
While the Timer Control input is inactive, the Extend/Disconnect timer is not used and a
CALL is output whenever a vehicle is detected. If the Timer Control input is active and the
loop becomes empty after a vehicle exits, then the Extend Disconnect timer will be
enabled. While the Extend Disconnect is running, the detect LED will flash 4 times a
second. If a vehicle is detected while the Extend Disconnect is running the Extend
Disconnect timer will be disabled. If the Extend Disconnect timer times out while the Timer
Control input is active, then the CALL output will be disabled and future detects ignored.
When the Timer Control input becomes active, the CALL output will be enabled again.
2.1.6.2.4 EXTENSION PLUS DISCONNECT (EXT+DIS)
While the Timer Control input is inactive, the Extend/Disconnect timer is not used and a
CALL is output whenever a vehicle is detected. When the Timer Control input becomes
active the Extend/Disconnect timer is enabled. While the Extend/Disconnect timer is
running, the detect LED will flash 4 times a second. If a vehicle is detected while the
Extend/Disconnect timer is running the Extend/Disconnect timer will be disabled. If the
Extend/Disconnect timer times out while the Timer Control input is active, then the CALL
output will be disabled and future detects ignored. When the Timer Control input becomes
active, the CALL output will be enabled again.
2.1.6.3 TIMER CONTROL INPUTS
Timer Control inputs are provided for each channel to modify the operation of the Delay
and Extension functions. The application of an AC voltage will inhibit the Delay timing
function and/or enable the Extend timing function as described in sections 2.1.6.1 and
2.1.6.2. When the Timer Control input for a channel is active (True) a “G” character is
displayed on the main display screen if timing functions are enabled.
Eberle Design Inc. Page 4
Page 9

ORACLE S1E and ORACLE S2E
Operations Manual
2.1.7 CHANNEL DI SPL AY
During normal operation each channel displays the Channel ID, Sensitivity setting,
Countdown timers, the Deflectometer, and the option of Frequency, Inductance, or Count
which can be selected by pressing the SCROLL switch Down. When the Timer Control
input for a channel is active (True) a “G” character is displayed.
2.1.7.1 COUNT DOWN TIMERS
The countdown timers are automatically displayed when a vehicle is detected, or in the
case of the Disconnect timer, when the Timer Control input becomes active. The time
remaining is displayed in minutes and seconds. A character is displayed to indicate which
countdown timer is being displayed; “P” for Presence, “D” for Delay, “E” for Extend, and “d”
for Disconnect.
2.1.7.2 LOOP FREQUENCY DISPL AY
When in the “Freq” display mode the LCD screen displays the loop frequency in kilohertz
(KHz). Note: the loop frequency is displayed in Hertz when setting the loop frequency
parameter.
2.1.7.3 LOOP INDUCTANCE DISPLAY
When in the “Induct” display mode the LCD screen displays the equivalent system loop
inductance (loop and lead-in inductance) within the range of 20 to 2500 microHenries.
2.1.7.3.1 LOOP INDUCTANCE ∆L/L DISPLAY
When in the “Induct” display mode, the LCD screen displays the percentage of inductance
change during the CALL state.
2.1.7.4 VEHICLE COUNT DISPL AY (ORACLE EC SERIES )
When in the “Count” display mode the LCD screen displays the current vehicle count. The
count can be reset by pressing the SCROLL switch Up.
2.1.7.5 DEFLECTOMETER
®
PIE GRAPH
For each channel, the LCD screen displays a pie graph which assists in determining the
optimum sensitivity setting by showing the change in inductance caused by traffic moving
over the loop and how this graph is affected by the sensitivity selected. Optimum sensitivity
setting is reached when the DEFLECTOMETER (numeral to the right of the pie graph)
reaches the value of ten (10), based on typical size vehicles (see section 3.2.1). This
results is a 50% filled graph. Selecting the optimum sensitivity level insures detection of all
vehicles, including motorcycles and hi-bed trucks. This helps to eliminate any further
service calls to adjust detector sensitivities.
Note that when operating in the Probe mode (see 2.1.4.1) the 50% optimal pie graph level
is reported as a quantitative value of 8 instead of 10.
2.1.7.6 DEFLECTOMETER
While the DEFLECTOMETER
®
STR EAMING G RAPH
®
displays an instantaneous indication of the current Call
strength, the Streaming Graph display graphically shows the Call strength over time. The
horizontal axis represents a six second interval. The vertical axis represents Call strength.
The graph only streams when there is a Call present and displays approximately six
seconds of data.
2.1.8 EVENT LOG
For each channel, the LCD screen can display the last 25 loop fault conditions and power
events via the “Event Log” menu. A channel reset will not clear the Event Log from
memory. To clear the Event Log memory, select either “Clear Log” or “Clear All” from the
“Event Log” menu.
Eberle Design Inc. Page 5
Page 10

ORACLE S1E and ORACLE S2E
Operations Manual
2.1.9 CHANNEL ID
Up to five (5) characters can be selected to identify each channel of detection.
2.1.10 PAIRED CHANNEL FUNCTIONS
These functions apply to the ORACLE S2E and S2EC models only.
2.1.10.1 3
Each channel’s “3
RD
CAR MODE
rd
Car” mode setting can be enabled by selecting the “3rd Car” option in
the “Paired Channels” menu (ORACLE S2E and S2EC only). This means that it takes two
channels to implement the feature. Therefore, when this feature is enabled in one channel,
its paired channel is also set to the same state.
For the ORACLE S2E (S2EC) model, 3
a vehicle is detected on only one of the two linked channels, the DETECT LED will flash 10
times a second. The “3
rd
Car” mode is intended to be used in Protected / Permissive left
rd
Car mode links channels 1 and 2 together. When
turn situations. The likely installation is a stop bar loop for the left turn lane connected to
one channel, a queue detection loop (with a small amount of delay time programmed) for
the left turn lane connected to the other channel, and the output of either channel
connected to the Vehicle Call input for the protected movement of the traffic controller.
As the first vehicle enters the left turn lane it will drive over the queue detection loop. Since
there is no vehicle over the stop bar loop, there is no call output generated. When the
vehicle advances to the stop bar loop, still no output is generated because there is now no
vehicle over the queue detection loop. When traffic in the left turn lane backs up and
occupies both the queue detection loop and the stop bar loop this will cause the detector to
generate a CALL to the traffic controller to service the protected movement for the left turn.
The spacing between the stop bar loop and the queue detection loop controls the size of
the queue needed to generate a call to the protected movement of the controller. The delay
time on the queue detection loop should be sufficient that a vehicle physically overlapping
this loop and the stop bar loop do not generate a CALL.
2.1.10.2 DIRECTIONAL LOGIC
Each channel’s Directional Logic setting can be enabled by selecting the “Direction” option
in the “Paired Channels” menu (ORACLE S2E and S2EC only). This means that it takes
two channels to implement the feature. Therefore, when this feature is enabled in one
channel, its paired channel is also set to the same state.
Directional logic starts with a CALL on one channel. This channel will go into a pending
state, DETECT LED flashing 10 times a second and NO output call. When both of the
paired channels have detection, the last channel to have detection will output a CALL until
the detection for the last channel ends, even if the detection ends for the first channel.
This feature is mainly intended to be used in freeway ramps for wrong way detection and
left turn lanes where other movements in the intersection tend to clip the detection zone of
the left turn lane. The likely installation is two loops, one after the other in the same lane,
spaced anywhere from slightly overlapping to 5 or 6 feet apart. Under normal conditions
both outputs can never be on at the same time. However, if one of the loops faults, the
output for the faulted loop will come on and stay on until the failure is corrected, and the
loop without the fault will output a call whenever it is occupied. The channel which received
the loop failure will indicate the type of loop fault on the FAULT LED (See section 2.2.4).
2.1.11 SET FACTORY DEFAULT SETTINGS
For the Oracle S2E(S2EC), simultaneously pressing the Channel 1 SCROLL “Up/Down”
switch Down and the Channel 2 SCROLL “Up/Down” switch Up while cycling power will
reset the detector to factory default settings.
Eberle Design Inc. Page 6
Page 11

ORACLE S1E and ORACLE S2E
Operations Manual
For the Oracle S1E(C), simultaneously pressing the MENU “Back/Select” switch Down and
the SCROLL “Up/Down” switch Up while cycling power will reset the detector to factory
default settings.
2.2 OPERATIONAL
2.2.1 CHANNEL OUTPUT CONTROL
Each channel has one of four output modes to choose from in the SET UP menu; Off, On,
Call, or Disabled.
Off: When set to the “Off” mode, the channel output is set continuously in the No Call state
regardless of the presence or absence of vehicles over the loop. The loop oscillator is
disabled. TS-2 Channel Status is reported as state #2 (detector not installed). This mode is
indicated by “*OFF*” on the LCD.
On: When set to the “On” mode, the channel output is enabled and menu set-up navigation
is enabled.
Call: When set to the “Call” mode, the channel output is continuously in the Call state
regardless of the presence or absence of vehicles over the loop. The loop oscillator is
disabled. This mode is indicated by “*CALL*” on the LCD. This option is can be useful for
checking controller response and other troubleshooting activities.
Disabled: When set to the “Disabled” mode, the channel output is set continuously in the
No Call state regardless of the presence or absence of vehicles over the loop. The loop
oscillator is disabled. TS-2 Channel Status is reported as state #1 (Normal). This mode is
indicated by “Channel Disabled” on the LCD.
2.2.2 LCD DISPL AY
The Liquid Crystal Display (LCD) incorporates a white LED backlight. The backlight is
energized when any switch is actuated and remains On for one hour after the last switch
actuation. The backlight improves visibility in poor lighting conditions. A built-in heater is
provided to enhance the LCD performance for cold temperature operation. See Section
3.7.4 for heater operation details.
2.2.3 HIGH INTENSITY COLOR-CODED LED INDICATORS
Red DETECT Indicator:
• Vehicle Detection = Solid ON
• Delay Timing = 2 Hz flash rate.
• Extension Timing = 4 Hz flash rate.
• Pending Call in 3
rd
Car Mode = 10 flashes per second.
• Pending Call in Directional Logic Mode = 10 flashes per second.
• Open Circuit = 1 single flash followed by a pause.
• Shorted Circuit = 2 flashes followed by a pause.
• 25% Change in Inductance = 3 flashes followed by a pause.
Yellow FAULT Indicator:
• Open Circuit = 1 single flash followed by a pause.
• Shorted Circuit = 2 flashes followed by a pause.
• 25% Change in Inductance = 3 flashes followed by a pause.
2.2.4 LOOP FAULT MONITOR
The detector continuously checks the integrity of the loop. The system is able to detect
open circuit loops, shorted loops, or sudden changes in inductance exceeding 25% of the
Eberle Design Inc. Page 7
Page 12

ORACLE S1E and ORACLE S2E
Flash Sequence
Fault
1 flash (per second)
Open Circuit Loop (or Inductance too high)
2 flashes (per second)
Shorted Circuit Loop (or Inductance too low)
3 flashes (per second)
25% Change in Inductance
Operations Manual
nominal inductance. If a fault is detected, both the DETECT (Red) and FAULT (Yellow)
LEDs continuously emit a sequence of flashes. Each type of fault is identified by a different
flash sequence:
In addition to the LED flash sequence, the LCD will display the type of fault condition during
the fault state. If the fault condition is removed, the LCD “Fault” indication and the DETECT
(Red) LED will return to normal operation. The FAULT (Yellow) LED will continue to flash
with the sequence signifying the type of fault that was last detected. In the case of the
excessive inductance change fault (possible loss of a loop within a series of loops), the unit
will log the fault and retune to the new inductance after a period of two seconds. The
logged fault will be stored in the Event Log memory.
2.3 VEHICLE COUNTING (ORACLE S1EC / S2EC)
2.3.1 VEHICLE COUNTING (ACCURATECOUNT) DISPL AY
If AccurateCount (Enable Vehicle Counting) mode is enabled, the LCD will reflect actual
counts from the secondary “Count” outputs. For each channel, when a vehicle occupies the
loop zone, the LCD counter accumulates one vehicle count per output. The counter is
capable of accumulating 999,999 vehicle counts per channel before rolling over to zero.
2.3.2 VEHICLE COUNTING (ACCURATECOUNT) MODE
For each channel, the AccurateCount (Enable Vehicle Counting) output feature can be
enabled via the “SET UP” menu to produce a secondary output in addition to the primary
CALL output for every vehicle entering the loop zone. Each vehicle entering the loop will
cause an output pulse of 125ms ± 25ms from the secondary “Count” output on pin S
(Channel 1) and pin Y (Channel 2), irrespective of the size of the loop. See section 3.3.2.
2.3.3 VEHICLE COUNTING (ACCURATECOUNT) LOOP CONFIGURATIONS
For each channel, when the AccurateCount (Enable Vehicle Counting) feature is enabled, a
loop configuration must be selected, via the “Set up Counting Type” menu for either a
single loop or up to eight loops connected together in series. For the single loop case, a
Short or Long configuration is also provided. See section 3.3.
Eberle Design Inc. Page 8
Page 13

ORACLE S1E and ORACLE S2E
Operations Manual
Section 3
Programming
3.1 INSTALLATION
Make connections to power and the loop. The input power supply level should be between
89 Vac and 270 Vac, 50/60 Hz. The detector has no DIP switches or jumpers to set. If the
installation is of a unit previously installed in another location, it may be advisable to reset
the detector to the factory defaults (see section 2.1.11).
3.1.1 MAIN MENU
The ORACLE has two bidirectional toggle switches per channel marked “MENU” (Back /
Select) and “SCROLL” (Up / Down). The “MENU” (Back / Select) switch is used to move to
the next parameter in the menu and select the values that have been chosen. The
“SCROLL” (Up / Down) switch is used to change the chosen parameter to the desired
value. Pressing the “MENU” (Back / Select) switch while the ORACLE is in normal
operation will cause the LCD to display the MAIN MENU. The dark navigation bar may be
moved to the desired function using the “SCROLL” (Up / Down) switch. When the desired
function is high-lighted by the navigation bar the “MENU” (Back / Select) switch may be
pressed to select the function.
The following functions are available for each channel:
RUN: Returns to the operating screen and resumes operation as before.
RESET: Returns to the operating screen, resets the detector, retunes to the loop.
SET UP: Enters the set-up sequence.
QUIK SET: Enters selected Set-up options that are used most frequently.
EVENT LOGS: Displays the event log screen.
3.2 SET UP MENU
Moving the navigation bar to “SET UP” and pressing the “MENU” (Back / Select) switch
down will begin the set-up sequence. The set-up sequence is context sensitive, i.e. the
value of a parameter that is selected may affect which parameter is next in sequence. For
example, if the “Channel Output” is set to “Off” which turns off call and status outputs, then
all other operational parameters are skipped and only the “Channel ID”, and “Display Mode”
can be set-up. This eliminates the need to set parameters that are not relevant to the
desired configuration of the detector.
3.2.1 SENSITIVITY
Sensitivity may be set to any value between 1 and 20. Sensitivity 1 is the least sensitive
and 20 the most sensitive. A DEFLECTOMETER
®
pie graph and numeric value are located
in the middle of the screen showing both graphically and numerically the change in
inductance strength as vehicles pass over the loop.
3.2.1.1 ADJUSTING SENSITIVITY USING THE DEFLECTOMETER
The DEFLECTOMETER
®
Pie Graph and Numeric Indicator should be blank with no vehicle
®
over the roadway loop. When a typical vehicle is completely in the detection zone
(DETECT indicator On), the sensitivity should be adjusted up or down until the
DEFLECTOMETER
DEFLECTOMETER
®
Pie Graph is shaded to the halfway position and the
®
Numeric Indicator (right side of the Pie Graph) is displaying the value
Ten (10). The detector is now set to the most optimum sensitivity level for the existing loop
network.
NOTE: The DEFLECTOMETER
sensitivity to the most optimum position. This is located below the DEFLECTOMETER
®
Streaming Graph is another visual aid when setting
®
Pie
Eberle Design Inc. Page 9
Page 14

ORACLE S1E and ORACLE S2E
Operations Manual
Graph and Numeric Indicator. Whether the Pie Graph or Numeric Indicator was used to
reach the optimum sensitivity value, the Streaming Graph is now equal to the dotted
reference line.
If a typical vehicle located over the roadway loop causes the value of “12” to be displayed
on the DEFLECTOMETER
done by pressing the front panel “SCROLL (Up/Down) toggle switch DOWN two times. The
DEFLECTOMETER
®
, the sensitivity should be decreased two levels. This can be
®
Pie Graph and Streaming Graph are visually showing that the
detector is now set to the most optimum sensitivity level.
If a typical vehicle located over the roadway loop causes the value “5” to be displayed on
the DEFLECTOMETER
by pressing the front “SCROLL (Up/Down)” toggle switch UP button five times. The
DEFLECTOMETER
®
, the sensitivity should be increased five levels. This can be done
®
Pie Graph and Streaming Graph are visually showing that the
detector is now set to the most optimum sensitivity level.
- NOTE -
THE DEFLECTOMETER® DYNAMICALLY UPDATES AFTER EACH SENSITIVITY
LEVEL CHANGE, ALLOWING CHANGES TO THE SENSITIVITY SETTINGS WHILE
A VEHICLE REMAINS IN THE LOOP DETECTION ZONE.
Note that when operating in the Probe mode (see 2.1.4.1) the 50% pie graph level is
reported as a value of 8 instead of 10.
3.2.1.2 ADJUSTING SENSITIVITY WITHOUT USING THE DEFLECTOMETER
®
The ORACLE offers 20 levels of sensitivity (1 to 20). Level 20 is the highest sensitivity.
From the “SET UP” or “QUIK SET” menu options, sensitivity can be selected and manually
set to any desired level by pressing the front panel “SCROLL (Up/Down) toggle up or down.
The new sensitivity value will be displayed on the LCD. The factory default Sensitivity
setting is level 10.
3.2.2 FREQUENCY
The LCD screen displays the actual loop frequency to help avoid interference which may
occur when loops connected to different detectors are located adjacent to one another.
One of eight (8) settings (normally in the range of 20 to 60 kilohertz) may be selected via
the “SET UP” or the “QUIK SET” menu options. The LCD screen also displays a frequency
stability meter (XY Graph) that allows you to analyze each frequency level to ensure proper
selection of frequency levels. The XY graph displays samples with respect to the reference.
The channels reference is in the center of the graph. A variation from the center of the
graph depicts frequency instability on the channel. Basically a thin smooth graph offers a
more optimum frequency selection over a thick uneven line.
3.2.3 PAIRED CHANNEL MODES (S2E, S2EC ONLY)
3.2.3.1 3
This setting can be enabled by selecting the “3
menu. When this feature is enabled in one channel, its paired channel is also set to the
same state. In the ORACLES S2E and S2EC models, 3
RD
CAR MODE
rd
Car” option in the “Paired Channels”
rd
Car mode links Channels 1 and 2
together. When a vehicle is detected on only one of the two linked channels, the channel
with the detected vehicle will enter a pending call state with the DETECT LED flashing 10
times a second and NO call output.
Eberle Design Inc. Page 10
Page 15

ORACLE S1E and ORACLE S2E
Operations Manual
3.2.3.2 DIRECTIONAL LOGIC MODE
This setting can be enabled by selecting the “Direction” option in the “Paired Channels”
menu. When this feature is enabled in one channel, its paired channel is also set to the
same state. In the ORACLE S2E and S2EC models, Channel 1 is paired with Channel 2.
Directional logic starts with a CALL on one channel. This channel will go into a pending
state with the DETECT LED flashing 10 times a second and NO call output. When both of
the paired channels have detection, the last channel to have detection will output a CALL
until the detection for the last channel ends, even if the detection ends for the first channel
3.2.4 OPERATIONAL MODES
Two operational modes are available, Presence and Pulse. In Presence mode the channel
will produce a call as long as the vehicle is within the detection zone. In Pulse mode, the
channel output will produce a 125 ms pulse for each vehicle that enters the detection zone.
3.2.4.1 PRESENCE MODE
Presence is defined as the maximum period for which the channel will detect a vehicle
within the zone of detection before retuning to the loop and dropping any CALL that may
exist on the channel. Presence mode may be set to Short, Long, or User Defined. If User
Defined is selected, the User Defined Presence time is the next parameter to set, followed
by the time-out mode. If Short or Long is set then the next parameter is Timing. Short
Presence is 30 minutes, Long Presence is 120 minutes.
When the unit is in the Call state, the display will show the value of the Presence timer in
the following format:
Seconds only (ex: 59”) for timer values less than 1 minute
Minutes and Seconds (ex: 99’59”) for timer values of 1 minute to 100 minutes
Hours and Minutes (ex: 17:59”) for timer values of 100 minutes to 18 hours
3.2.4.1.1 USER DEFINED PRESENCE
Each channel may be set to a value between 5 seconds and 96 hours.
3.2.4.1.2 USER DEFINED PRESENCE TIME-OUT MODES
Each channel may be set to either End-of-Green (Grn Ends) or Immediate (Immed). In the
“Grn Ends” mode a detection that remains after the presence time has expired will be reset
at the next end of green (i.e. the next time the Timer Control input goes from ON to OFF. In
the “Immed” time-out mode, a detection that remains after the presence time has expired
will be reset immediately.
3.2.4.2 TIMING
Each channel may be set to either YES or NO. If YES is selected, then DELAY or EXTEND
times may be entered.
3.2.4.2.1 DELAY
Delay time from 0.1 seconds to 5 minutes may be entered. If a delay time is set then the
output CALL in response to a vehicle entry is delayed for the specified time. If the vehicle
leaves before expiration of the delay, NO CALL is produced. A Timer Control signal input
will inhibit the delay function.
3.2.4.2.2 EXTEND
Extend time from 0.1 seconds to 1 minute may be entered. If an extension time greater
than zero is entered, the output CALL will be extended for the specified time after the
vehicle has left the detection zone. If the extension time is zero the next item to set will be
Vehicle Counting. Note: when pulse mode is enabled, the extension time extends the
length of the pulse being output.
Eberle Design Inc. Page 11
Page 16

ORACLE S1E and ORACLE S2E
Operations Manual
3.2.4.2.2.1 EXTEND TIMING MODE
Extend Always Mode (Always): When a vehicle exits the loop zone and the zone remains
vacant, the extend timer will be enabled and CALL output will be maintained until the timer
times out.
Extend On-Green Mode (OnGreen): The Extend on Green mode extends a call only when
the timer input is active. If this feature is enabled and the Timer Control input is active when
the loop becomes empty after a vehicle exits, then the extend timer will be enabled and the
CALL output will be maintained until the timer times out. If the Timer Control input is
inactive when the loop becomes empty after a vehicle exits, then the extend timer will not
be enabled and the CALL output will be cleared. While the timer is running, the DETECT
LED will flash 4 times a second. If the timer is running and the Timer Control input becomes
inactive, the timer will be disabled and the CALL will be cleared. If the timer is running and
a vehicle is detected, the timer will be disabled and the CALL maintained until the loop
again becomes empty, at which point the extend process repeats its self.
Extend Disconnect (Discnnct): The Disconnect mode disables the output of calls if the loop
is empty for the specified period of time. Disconnect only occurs when the Timer control
input is active. While the Timer Control input is inactive, the Extend/Disconnect timer is not
used and a CALL is output whenever a vehicle is detected. If the Timer Control input is
active and the loop becomes empty after a vehicle exits, then the disconnect timer will be
enabled. While the timer is running, the detect LED will flash 4 times a second. If a vehicle
is detected while the timer is running the disconnect timer will be disabled. If the disconnect
timer times out while the Timer Control input is active, then the CALL output will be
disabled and future detects ignored. When the Timer Control input becomes active, the
CALL output will be enabled again.
Extension plus Disconnect (Ext+Dis):
The Extend plus Disconnect mode generates a call whenever the Timer Control input
becomes active and then disables the call output if the loop is empty for the specified
period of time. While the Timer Control input is inactive, the Extend/Disconnect timer is not
used and a CALL is output whenever a vehicle is detected. When the Timer Control input
becomes active the Extend/Disconnect timer is enabled. While the Extend/Disconnect is
running, the detect LED will flash 4 times a second. If a vehicle is detected while the
Extend/Disconnect is running the Extend/Disconnect timer will be disabled. If the
Extend/Disconnect timer times out while the Timer Control input is active, then the CALL
output will be disabled and future detects ignored. When the Timer Control input becomes
active, the CALL output will be enabled again.
3.2.5 CHANNEL ID
A five characters ID name can be set to any alphanumeric character A through Z, 0 through
9 or space to custom label each channel of detection. Using the “MENU (Back/Select)”
switch, pressing “Select” causes the cursor to move to the next digit to the right and
pressing “Back” causes the cursor to move to the next digit to the left. To edit each digit,
use the “SCROLL (Up/Down)” switch and press DOWN or UP keys accordingly. Continue
until all of the digits are set and then press the “MENU (Back/Select)” switch down until the
screen highlights OK to confirm and save.
3.3 VEHICLE COUNTING (ORACLE EC SERIES)
Each channel Count Mode may be set to YES or NO. If YES is selected then the “SET UP
Counting Type” and “Enable Count Output” can be set.
3.3.1 COUNTING TYPE (ACCURATECOUNT)
The “Counting type” can be selected to be either on one loop or up to eight loops
connected in series. The “one loop” setting includes all loop configurations, square or
rectangle, where a single loop is connected to the loop inputs. The “Loop Length” setting
Eberle Design Inc. Page 12
Page 17

ORACLE S1E and ORACLE S2E
Operations Manual
should be selected to optimize counting accuracy. A “Short” length is typically considered
as a 6’ long loop. The “Long” length is typically considered as a loop 10’ or greater in
length.
On the two to eight loop setting the Count must be derived from a configuration of individual
loops (6’ x 6’ square or round loops on 12’ to 15’ centers) connected in series within a
single lane. Each vehicle that enters the detection zone will be counted irrespective of
whether vehicles are already present. Accuracy is dependent on the type and volume of
traffic and loop configurations, high long term accuracies are possible.
3.3.2 VEHICLE COUNTING OUTPUT (ACCURATECOUNT)
For the ORACLE S1EC and S2EC models only, the Vehicle Counting output may be set to
NO or YES. If Count Outputs are set to NO then the secondary outputs on the edge card
connector are disabled, Count information will then only be available on the front panel
LCD. If YES is selected, then a secondary output will be produced in addition to the primary
CALL output for every vehicle entering the loop zone. Each vehicle entering the loop will
cause an output pulse of 125ms ± 25ms from the respective secondary “Count” output.
3.4 DISPLAY MODES
Each channel display (view) can be set to either Frequency (Freq), Inductance (Induct), or
Count (S1EC, S2EC). This sets the screen that is displayed when the detector starts up or
when RUN is selected.
The Frequency (Freq) view displays the channel ID, sensitivity level, and loop frequency
when there is no vehicle in the loop zone. When a vehicle enters the loop zone, the
channel ID, count down timer (Presence mode only), loop frequency, DEFLECTOMETER
®
Pie Graph, Numeric Indicator, and Streaming Graph are displayed and active.
The Inductance (Induct) view displays the channel ID, sensitivity level, and loop inductance
when there is no vehicle in the loop zone. When a vehicle enters the loop zone, the
channel ID, count down timer (Presence mode only), ∆L/L% value, DEFLECTOMETER
®
Pie Graph, Numeric Indicator, and Streaming Graph are displayed and active.
The Count view (S1EC, S2EC) displays the channel ID and current count accumulated
since the channel was last reset along with the loop frequency. To reset the count
accumulator use the SCROLL (Up) switch.
NOTE: You can toggle between each of the three (3) views using the SCROLL (Down)
switch at any time during detector operation.
3.5 LOOP FAULT MONITOR
The ORACLE constantly monitors each channel loop(s) and responds to faults in several
ways to allow the operator to pinpoint loop related problems. Three types of loop related
faults can be detected: Open Circuit Loop or loop inductance above rated range, Short
Circuit Loop or loop inductance below rated range, and 25% change from nominal (tuned)
inductance.
When a fault is detected on either channel the ORACLE responds by outputting a detection
CALL. It flashes both DETECT and FAULT LEDs with a flash sequence denoting the type
of fault and also displays the type of fault on the LCD screen. The LED flash sequence is
common with all EDI Loop Monitor
products. A single flash for open circuit loops, double
flash for short circuit and a triple flash for a 25% change of inductance.
3.6 EVENT LOG
The ORACLE features a fault log which retains the last twenty-five (25) faults that have
occurred on each channel. From the main menu select “EventLog” to view the Event Logs
Eberle Design Inc. Page 13
Page 18

ORACLE S1E and ORACLE S2E
Operations Manual
menu options. Select “View Log” to view and scroll through the last 25 Events. To review
details of an individual Event, select (highlight) an event and press the “MENU (Select)”
switch. Details including the elapsed time since the Event are displayed. Each time a new
fault is logged the previous logs are moved down one. To clear an individual log or all logs,
go to the Event Log menu and select either “Clear Log” or “Clear All” and respond
appropriately to the next screen.
3.7 SYSTEM MENU
Some global settings are applied in the System menu. To access the System menu press
the Channel 1 MENU and SCROLL switches to the Up position (Back, Up) simultaneously.
3.7.1 RUN MENU ITEM
Selecting the Run item exits the System menu level and returns to the main display.
3.7.2 SYSTEM INFO MENU ITEM
Selecting the SysInfo item displays the firmware revision level and channel configuration.
3.7.3 TEMPERATURE AND VOLTAGE MENU ITEM
Selecting the Temp,VDC item displays the current temperature and the DC voltage applied
internally to the Detector Unit DC supply.
3.7.4 LCD DISPLAY HEATER MENU ITEM
Selecting the Heater item displays the state of the front panel LCD display heater. Selecting
Off disables the heater function under all conditions (default). Selecting On will enable the
heater function under the following conditions; the temperature is less than 32 degrees F (0
degrees C), AND any of the front panel switches has been activated. The heater and LCD
backlight will then remain On for 60 minutes following a switch activation.
A “H” character will be displayed next to the DEFLECTOMETER when the LCD heater is
activated.
To temporarily turn off the heater function before the 60 minute time-out occurs, press the
MENU button Up (Back position) while in the main display level. The heater function and
backlight will be turned off until the next switch activation.
3.7.5 OPTIONS MENU ITEM (ORACLE EC SERIES)
For the Oracle S1EC and S2EC models, selecting the Option menu item provides access
to the Probe Gap and Stream control items.
3.7.5.1 PROBE GAP MENU ITEM
The Probe Gap Between Vehicles item allows a user to specify the minimum gap between
vehicles passing through the detection zone only when operating in the Probe Mode. The
entry range is 150 milliseconds to 500 milliseconds. This setting helps to optimize the
distinction between closely spaced vehicles and large trucks.
3.7.5.2 STREAM MENU ITEM (ORACLE ECX SERIES)
For the Oracle S1ECX and S2ECX models this option enables a serial communication
function to stream signature data to a recording station.
Eberle Design Inc. Page 14
Page 19

ORACLE S1E and ORACLE S2E
Operations Manual
Section 4
Theory of Operation
4.1 GENERAL
The ORACLE Loop Monitor works on the principle of measuring the period of a predetermined number of cycles from an oscillator whose frequency is directly related to the
inductance of the loop to which the unit is connected. The measurement is done by
counting the number of cycles of a stable crystal reference that occur during the period to
be measured. This scheme provides a high resolution measurement in a short period of
time. Consecutive measurements can be compared with each other to determine whether
or not the frequency of the loop oscillator has changed sufficiently to indicate the presence
of a vehicle.
The ORACLE circuitry can be broken down into four major blocks. The loop oscillator,
digital processing circuitry, switch controls and outputs/indicators. The oscillator input
incorporates a transformer to isolate the loop from the internal oscillator circuitry and a
surge protector is used to protect the unit from transient damage. The loop oscillator
frequency may be modified by switching capacitors in or out of the oscillator circuit in order
to affect crosstalk avoidance. The output signal from the oscillator is fed through a squaring
circuit and provided to the digital processing section.
The microcontroller uses a high speed crystal clock count to calculate the loop inductance,
frequency and percentage of inductance change. The values are displayed on the front
panel LCD. The microcontroller also processes the toggle switch selections and stores the
operating parameters in non-volatile memory. The operational mode determines whether
the detection CALLS are to be Presence or Pulse and the sensitivity setting determines the
number of loop oscillator cycle “blocks” to use in the period measurement process. The
microcontroller then begins the measurement process by energizing the loop oscillator for
the channel to be measured.
During period measurement the microcontroller counts the number of cycles of the crystal
based reference frequency. When the period ends, the count is compared with a stored
reference and detection decisions are made. Small changes which occur over a relatively
long period of time are considered due to the changing environment, and the stored
reference is modified accordingly by the microcontroller.
Detection CALLS are made via the relay outputs. These isolate the traffic controller input
from the ORACLE circuitry. Output CALL and loop fault monitor status are indicated by
both the front panel LCD and high intensity LEDs.
4.2 TROUBLE ANALYSIS
The following should be used to troubleshoot both the Oracle Loop Monitor and the loop
installation.
4.2.1 LCD OR LED NOT LIT - DETECTOR DOES NOT OPERATE OR HAVE POWER
Power supply fault: The ORACLE detectors require an 89 to 270 VAC nominal supply. The
ORACLE will normally operate at lower voltages but this may result in the unit entering a
reset state. In this case, the unit will appear to be non-functional.
4.2.2 FAULT AND DETECT LEDS FLASHING
Loop or lead-in wiring has a fault: Check the type of fault being indicated on the LCD or by
the number of flashes on the Fault LED. The type of fault may assist in locating the
problem. A single flash followed by a pause indicates an open circuit loop or loop
inductance too large. A double flash followed by a pause, indicates a shorted loop or loop
inductance too small (see section
Eberle Design Inc. Page 15
3.5).
Page 20

ORACLE S1E and ORACLE S2E
Operations Manual
4.2.3 DETECTOR DOES NOT DETECT ALL VEHICLES
Sensitivity too low: Select sensitivity by utilizing the LCD DEFLECTOMETER® visual aids
(see section 3.2.1). Using the DEFLECTOMETER® visual aids insures that all vehicles,
including motorcycles and hi-bed trucks will be detected. You can also manually increase
sensitivity to a desired level.
4.2.4 DETECTOR IS NOISY/CHATTERS/GIVES FALSE DETECT CALLS
Two or more detector units are interfering with each other (crosstalk). Check frequency
settings on detectors which are connected to loops closest to the ORACLE exhibiting
crosstalk; several may be showing signs of crosstalk themselves. Adjust the frequency
levels utilizing the LCD (Setup Freq menu) and front panel toggle switches on all units
affected so that the largest possible margin exists between frequencies of loops positioned
the closest. The rule of thumb for 6x6 ft loops is to separate the channel frequency by at
least 5 kilohertz. When in the “Setup Freq” menu, both the actual frequency is displayed
and a frequency stability graph below the frequency. When changing frequencies, a thinner
line on the graph mean less interference is being seen by the detector and a thicker or
uneven line represents more interference being seen by the detector.
4.2.5 POOR LOOP CONNECTIONS
Loop connections are very important to the satisfactory operation of the ORACLE Series II.
All connections whether they are in the cabinet or at the roadside must be secure
preferably soldered and, in the case of connections made at the roadside, waterproofed to
prevent shorting to ground.
4.2.6 POOR LOOPS
Loops that have become degraded due to the passage of traffic may cause the ORACLE to
exhibit crosstalk-like symptoms. It may be possible to reduce the sensitivity while
maintaining adequate detection of vehicles. However, the ideal solution is to replace the
loop.
Eberle Design Inc. Page 16
Page 21

ORACLE S1E and ORACLE S2E
Operations Manual
Section 5
Loop Installation
5.1 LOOP DESIGN
The typical sensing height is 2/3 of the shortest leg of a loop (in feet). Therefore a 4’ x 8’
loop typically has a detection height of 2.6’.
The inductance of a conventional four-sided loop can be estimated using the formula:
L = P x (T
P = Loop Perimeter in feet
T = Number of wires in saw slot
Therefore a 4’ x 8’ loop with 3 turns would be:
L = (4 + 8 + 4 + 8) x (3
L = 24 x (9 + 3) / 4
L = 24 x 12 / 4
L = 72 microHenries
Note: Loop feeder cable typically adds 0.22 microHenries of inductance per foot of cable.
The following are suggested guidelines for loop installation with the ORACLE Vehicle
Detector.
To begin, make sure that the pavement surface in the area that loops are to be installed is
dry and free of debris. The outline of the loop(s) should be marked on the pavement in such
a way that the lines can be followed easily by the saw operator and not be erased by the
water feed from the saw itself.
All 90-degree corners should be chamfered so that the course of the loop wire does not
change direction sharply but rather at shallower angles of 45 degrees or less. Core drilling
of the corners achieves the same effect but can still lead to failure due to sharp edges
remaining in the corner area. When the outline of the loop and lead-in has been marked,
the pavement can be cut. Diamond blade cutting saws are recommended. The saw cut
should be approximately 2.0 inches deep and 0.25 inches wide. The saw slot should then
be cleaned out and allowed to dry. Compressed air is useful both for ejecting debris and
speeding up the drying process. All debris in the vicinity of the saw slot should also be
removed so that it is not accidentally pushed back in.
As a general rule loops with circumference lengths less than 12 feet require 5 turns of wire,
12 to 60 feet require 3 to 4 turns of wire, loops with greater circumference lengths should
have 2 to 3 turns.
Recommended loop wire is typically 14, 16, 18, or 20 AWG with cross-linked polyethylene
insulation. Since moisture can cause significant changes in the dielectric constant of the
insulation, which results in excessive loop (frequency) drift, choose insulation, which is
most impervious to moisture. PVC, TFFN, THHN, and THHN-THWN should be avoided
since they tend to absorb moisture and crack easily. XLPE (Cross Linked Polyethylene) is
very resistant to moisture absorption and provides good abrasion resistance.
If long lead-ins are required, it is suggested that the loop cable be spliced onto shielded,
pre-twisted, lead-in wire (IMSA specification 50-2 is suggested) at a convenient pull box
location close to the loop. The shield may be connected to earth at the cabinet end but
should then be insulated and isolated from earth ground at the loop end. The inductance of
the loop itself should be at least 50% of the sum of loop inductance plus lead-in inductance.
Start laying the loop wire from the termination of the lead-in out towards the loop, continue
around the loop for the number of turns required and finally return to the lead-in
termination. Leave the lead-in wire out of the slot so that it may be twisted together before
2
+ T) / 4 Where L = Loop Inductance in microHenries
2
+ 3) / 4
Eberle Design Inc. Page 17
Page 22

ORACLE S1E and ORACLE S2E
Operations Manual
being laid in the slot. Lead-ins should be twisted with a minimum of 4 to 6 twists per foot to
prevent any separation of the lead-in wires.
Make sure that the loop wire is pushed fully to the bottom of the saw slot. Small pieces of
foam rubber (backer rod) or similar material may be used at various points around the
circumference to prevent the loop wire from rising up while the sealant is poured and
curing.
Many different types of loop sealant are now available. Single part types are the easiest to
apply since no mixing is required, but they also tend to be more expensive in terms of linear
feet of saw slot filled. When applying the sealant, make sure that it is able to sink to the
bottom of the slot and completely encase the loop wire. The wire should not be able to
move when the sealant has set. Ensure that there is enough sealant to completely fill the
slot; if possible the sealant should protrude slightly above the surface of the pavement so
that small rocks or other debris cannot collect in the slot.
The sealant manufacturer instructions concerning setting time should be noted especially
when determining the length of time to wait before allowing vehicles to cross the loop area.
Consult the Eberle Design web site at www.EDItraffic.com
information regarding loop design.
for further application
Eberle Design Inc. Page 18
Page 23

ORACLE S1E and ORACLE S2E
Operations Manual
Section 6
Specifications
6.1 MECHANICAL
Height .......................................................................................................... 5.5 inches
Width (S1E) .................................................................................................. 2.0 inches
Width (S2E) .................................................................................................. 3.0 inches
Depth (chassis only) ..................................................................................5.412 inches
6.2 ENVIRONMENTAL
Storage Temperature Range ................................................................... -45 to +85
Operating Temperature Range ................................................................ -34 to +74
LCD Operating Temperature Range ........................................................ -20 to +74
o
C
o
C
o
C
Humidity Range (non-condensing) ..................................................... 0 to 95% Relative
6.3 ELECTRICAL
AC Supply Voltage Minimum ............................................................................ 89 Vac
AC Supply Voltage Maximum .......................................................................... 270 Vac
AC Supply Frequency .................................................................................... 50/60 Hz
AC Timer Control Inputs
True (active) ........................................................................... greater than 70 Vac
False (not active) ........................................................................ less than 15 Vac
Relay Outputs
AC Contact Rating .......................................................................... 5A @ 240 Vac
DC Contact Rating ............................................................................ 5A @ 30 Vdc
Optically Isolated Outputs (S1ES, S1ECS, S2ES, S2ECS models only)
True (low, 25 mA) .......................................................................less than 1.5 Vdc
False (high) ............................................................................ greater than 16 Vdc
Maximum Leakage Current (high) ................................................... less than 1 uA
Maximum Current ....................................................................................... 50 mA
6.4 LOOP INDUCTANCE (TUNING) RANGE
The detector will automatically tune to a loop and lead-in combination within the tuning
range of 20 to 2500 microHenry with a Q factor greater than 5.
6.4.1 GROUNDED LOOP OPERATION
Each detector channel will operate when connected to poor quality loops including those
that have a short to ground at a single point.
6.4.2 LE AD-IN LENGTH
The unit will operate with lead-in (feeder) lengths up to 5,000 feet with appropriate loops
and proper lead-in cable.
6.5 LOOP INPUT (LIGHTNING PROTECTION)
The loop input incorporates lightning and transient protection devices and the loop
oscillator circuitry is transformer-isolated for each channel. The lightning protection will
withstand the discharge of a 10 uF capacitor charged to 2,000V across the loop inputs or
between a loop input and Earth Ground for each channel. The transformer isolation allows
operation with a loop which is grounded at a single point.
Eberle Design Inc. Page 19
Page 24

ORACLE S1E and ORACLE S2E
Sensitivity
Response Time (ms)
Sensitivity
Response Time (ms)
Noise Filter
Noise Filter
Off
Normal
Max
Off
Normal
Max
1
10-22
22-44
51-105
11
10-22
22-44
51-105
2
10-22
22-44
51-105
12
10-22
22-44
51-105
3
10-22
22-44
51-105
13
10-22
22-44
51-105
4
10-22
22-44
51-105
14
10-22
22-44
51-105
5
10-22
22-44
51-105
15
14-30
22-44
51-105
6
10-22
22-44
51-105
16
16-34
22-44
51-105
7
10-22
22-44
51-105
17
20-41
22-44
51-105
8
10-22
22-44
51-105
18
23-50
22-44
51-105
9
10-22
22-44
51-105
19
30-60
28-49
51-105
10
10-22
22-44
51-105
20
39-74
36-61
51-105
Sensitivity
Response Time (ms)
Sensitivity
Response Time (ms)
Noise Filter
Noise Filter
Off
Normal
Max
Off
Normal
Max
1
11-25
23-45
61-107
11
15-32
23-45
61-107
2
11-25
23-45
61-107
12
15-32
23-45
61-107
3
11-25
23-45
61-107
13
15-32
23-45
61-107
4
11-25
23-45
61-107
14
19-39
23-45
61-107
5
11-25
23-45
61-107
15
19-39
23-45
61-107
6
11-25
23-45
61-107
16
23-45
23-45
61-107
7
11-25
23-45
61-107
17
31-59
32-58
61-107
8
11-25
23-45
61-107
18
39-73
40-72
61-107
9
11-25
23-45
61-107
19
50-94
53-93
61-107
10
11-25
23-45
61-107
20
66-121
69-121
69-121
ORACLE S1E(S)
ORACLE S1EC(S)
Pin
Function
Pin
Function
A
Neutral (AC-)
A
Neutral (AC-)
B
Ch 1 Output Relay Common (Emitter)
B
Ch 1 Output Relay Common (Emitter)
C
Power (AC+)
C
Power (AC+)
D
Channel 1 Loop Input
D
Channel 1 Loop Input
E
Channel 1 Loop Input
E
Channel 1 Loop Input
F
Ch 1 Output Relay N.O. (Collector)
F
Ch 1 Output Relay N.O. (Collector)
Operations Manual
6.6 RESPONSE TIMING
6.6.1 ORACLE S1E (S1EC)
Response times based on relay operation.
6.6.2 ORACLE S2E (S2EC)
Response times based on two channel relay operation with both channels set to the same
sensitivity.
6.7 CONNECTOR PIN ASSIGNMENTS
Relay Contacts are listed with power applied, loops connected, and no vehicle present (no
call).
6.7.1 ORACLE S1E(S) AND S1EC(S) PIN ASSIGNMENT
Eberle Design Inc. Page 20
Page 25

ORACLE S1E and ORACLE S2E
ORACLE S1E(S)
ORACLE S1EC(S)
Pin
Function
Pin
Function
G
Ch 1 Output Relay N.C.
G
Ch 1 Count Relay N.O. (Collector)
H
Earth Ground
H
Earth Ground
I
Reserved
I
Ch 1 Count Relay Common (Emitter)
J
Ch 1 Timer Control
J
Ch 1 Timer Control
Pin
Channel 1 Function
Pin
Channel 2 Function
A
Neutral (AC-)
A
No connection
B
Ch 1 Output Relay Common (Emitter)
B
Ch 2 Output Relay Common (Emitter)
C
Power (AC+)
C
No connection
D
Channel 1 Loop Input
D
Channel 2 Loop Input
E
Channel 1 Loop Input
E
Channel 2 Loop Input
F
Ch 1 Output Relay N.O. (Collector)
F
Ch 2 Output Relay N.O. (Collector)
G
Ch 1 Output Relay N.C.
G
Ch 2 Output Relay N.C.
H
Earth Ground
H
Earth Ground
I
Reserved
I
Reserved
J
Ch 1 Timer Control
J
Ch 2 Timer Control
Pin
Channel 1 Function
Pin
Channel 2 Function
A
Neutral (AC-)
A
No connection
B
Ch 1 Output Relay Common (Emitter)
B
Ch 2 Output Relay Common (Emitter)
C
Power (AC+)
C
No connection
D
Channel 1 Loop Input
D
Channel 2 Loop Input
E
Channel 1 Loop Input
E
Channel 2 Loop Input
F
Ch 1 Output Relay N.O. (Collector)
F
Ch 2 Output Relay N.O. (Collector)
G
Ch 1 Count Relay N.O. (Collector)
G
Ch 2 Count Relay N.O. (Collector)
H
Earth Ground
H
Earth Ground
I
Ch 1 Count Relay Common (Emitter)
I
Ch 2 Count Relay Common (Emitter)
J
Ch 1 Timer Control
J
Ch 2 Timer Control
Operations Manual
6.7.2 ORACLE S2E(S) PIN ASSIGNMENT
6.7.3 ORACLE S2EC(S) PIN ASSIGNMENT
Eberle Design Inc. Page 21
 Loading...
Loading...