

Page 1
HOBO® Pendant® G Data Logger (UA-004-64)
White Paper
This white paper explains the operation of the HOBO Pendant G data logger (UA-004-64).
Operating Principles
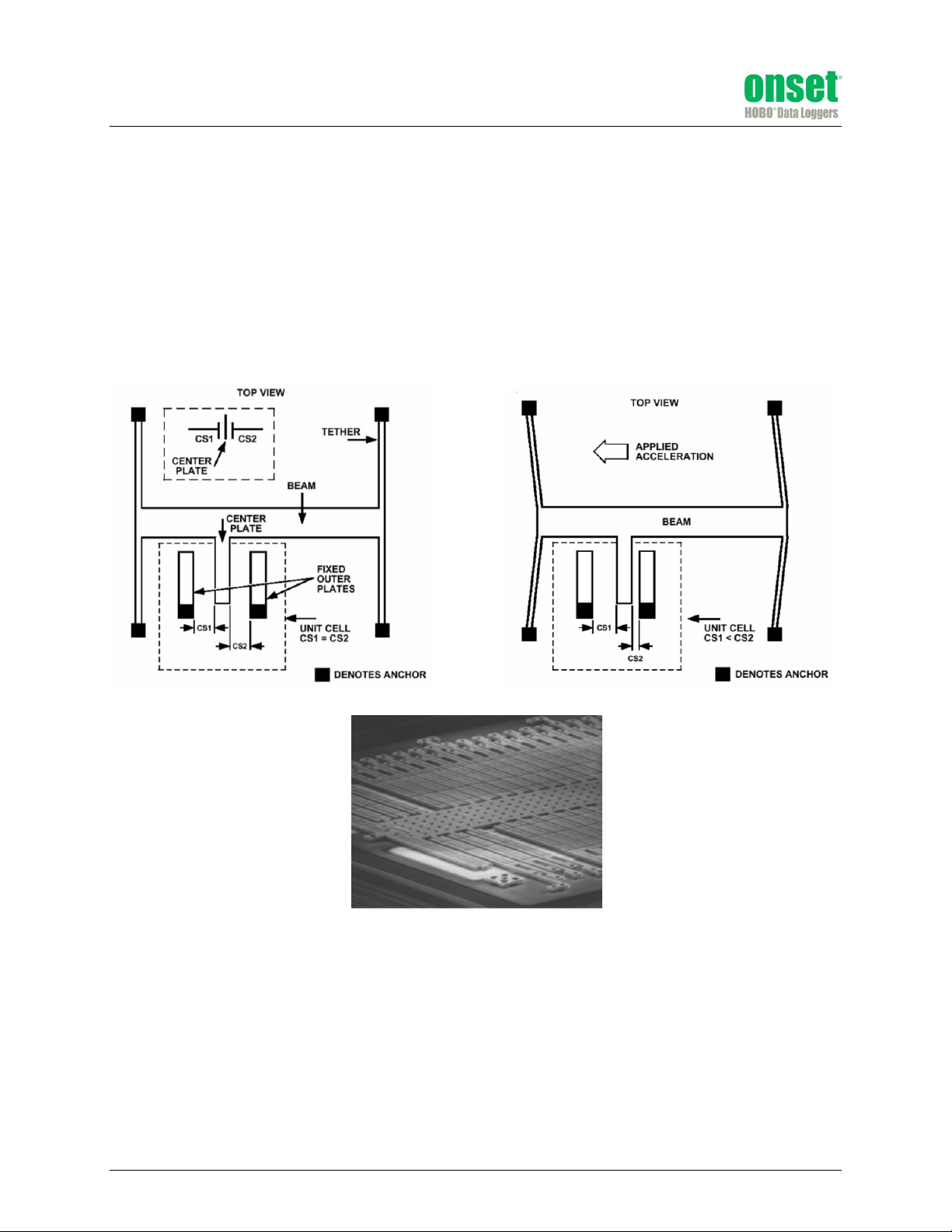
The accelerometer used in the Pendant G logger is an Analog Devices ADXL330 model. Inside the accelerometer,
tethered beams are anchored at fixed locations. The beam is micro-machined with center plates that mesh in
between fixed outer plates causing a capacitance. As the beam moves, the center plate displacement causes a
change in capacitance proportional to the applied acceleration. A circuit inside the accelerometer takes advantage
of this change in capacitance and converts it to a proportional output voltage for the microprocessor. The
microprocessor uses calibration data along with a transfer function to convert the input voltage to an equivalent
acceleration value in G, where 1G = 9.8m/s².
© Analog Devices
16920-A
Page 2
HOBO Pendant G White Paper
Logger Orientation and Frame of Reference
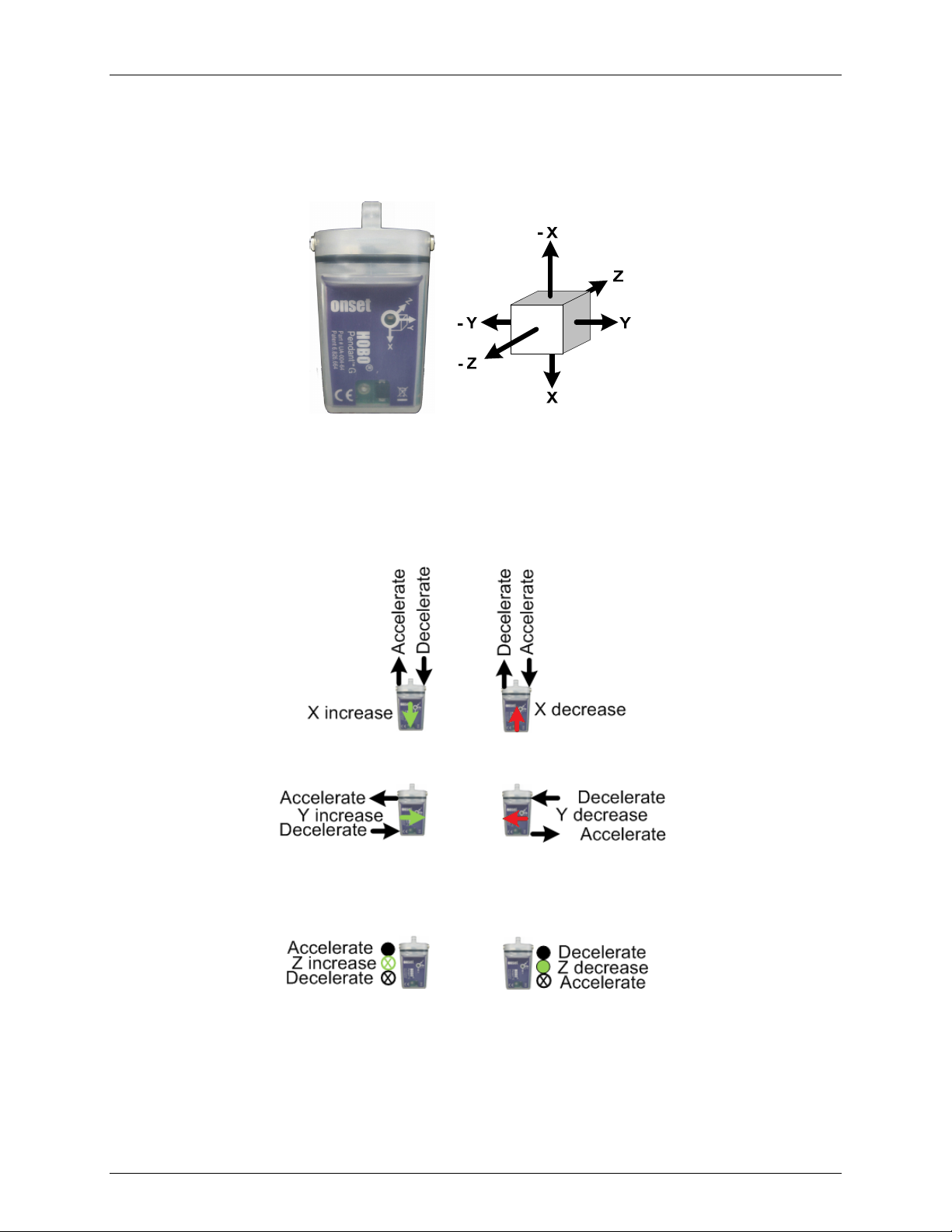
The logger label uses an X, Y , Z axis of orientation where each of three axes is orthogonal. When the logger is
oriented as shown below, the X axis points down, the Y axis points right, and the Z axis points away (into the page).
To help visualize the Z axis, this can also be depicted using a 3 dimensional cube.
Axes of Acceleration Sensitivity
The accelerometer output varies depending on the direction of acceleration. To illustrate this, the motion of
acceleration along each axis is depicted below with a black arrow. The increase and decrease in axis output is
shown in green and red respectively. For the Z axis, arrow directions into the page are depicted with an X symbol
and out of the page with a colored dot.
1-800-LOGGERS 2 www.onsetcomp.com
Page 3
HOBO Pendant G White Paper
Accelerometer Location
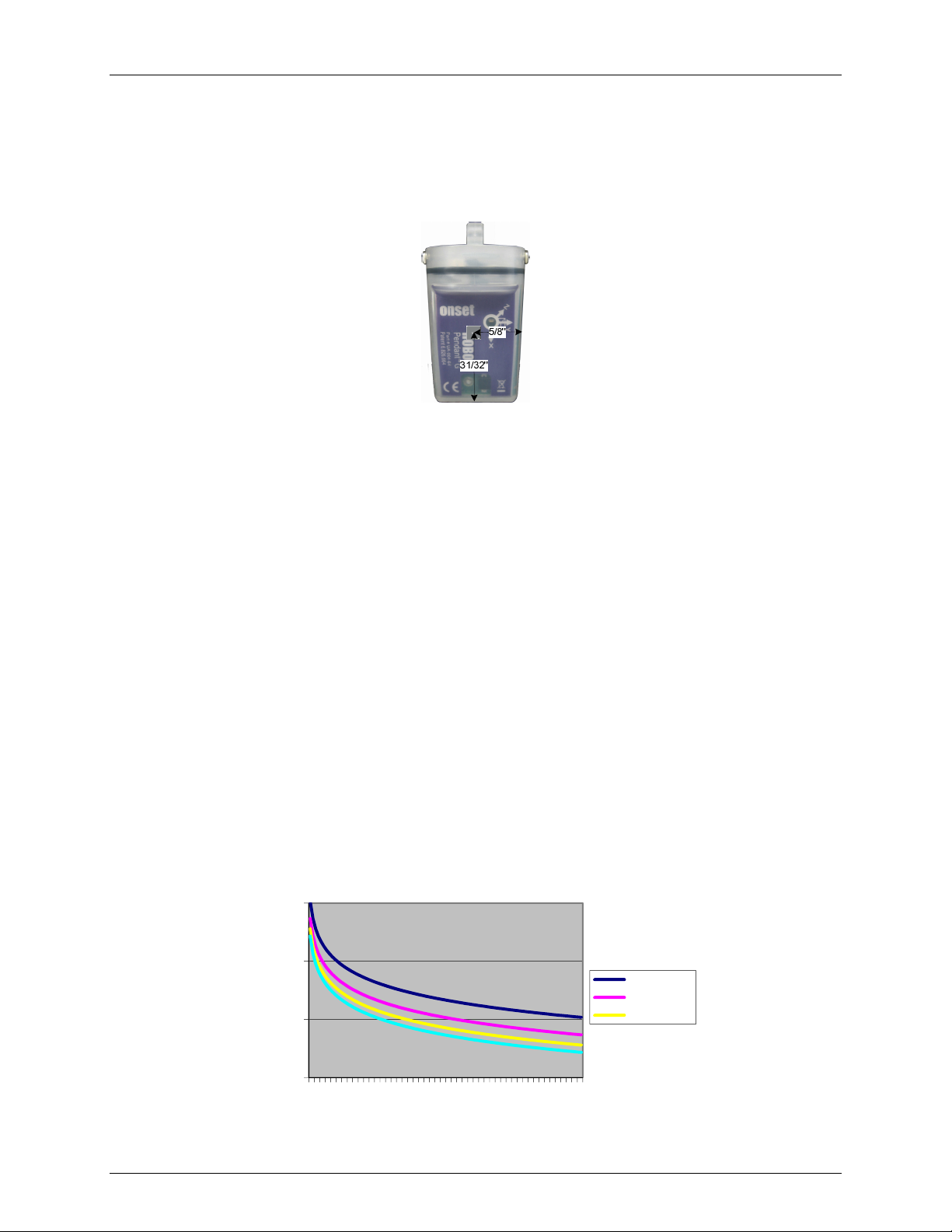
Locating the accelerometer on the printed circuit board may be useful for experiments dealing with centripetal
motion where the radius distance from the center of rotation to the accelerometer must be known. Dimensions
are from the edge of the logger and bottom of the logger to the center of the accelerometer and shown below in
inches (5/8" and 31/32").
Logging Modes
There are two logging modes: Normal and Fast. The mode is determined by the Logging Interval selected in the
Logger Launch window in HOBOware. If the Logging Interval is set to 1 second or greater, the logger will operate in
normal mode. If the Logging Interval is set to “Fast,” the logger will operate in Fast Mode (you must also select the
Hz in this mode).
Normal mode is ideally suited for tilt applications due to the low frequency of events. When in normal mode, the
logger takes one instantaneous sample every logging interval and stores it to internal memory. It does not do any
averaging or peak measurement over the logging interval.
Fast mode is better suited for dynamic acceleration events where movement, vibration, and shock need to be
captured. See the section Dynamic Acceleration: Fast Mode on page 11 for more details.
Memory Fill Time
The logger has 64K bytes of memory for data and logger header storage. The time required to fill this memory is a
function of how many channels are being logged and the logging interval/mode. The following formula can be used
to determine the “Fill Time.”
Fill_Time(s) = (Memory_size-Header_size)/(# samples/sec * # enabled channels)
For example, a logger with a header size of 500 bytes, 1 sample/s, 3 enabled channels would be:
Fill_Time(s) = (65535-500)/(1 * 3) = 21678s (~6hrs)
The results of this calculation, for fast mode, are shown in Plot A.
1000
100
1 Channel
2 Channel
10
Fill Time (min)
3 Channel
1
1 112131415161718191
Samples/sec (Hz)
Plot A: Logger Memory Fill
1-800-LOGGERS 3 www.onsetcomp.com
Page 4
HOBO Pendant G White Paper
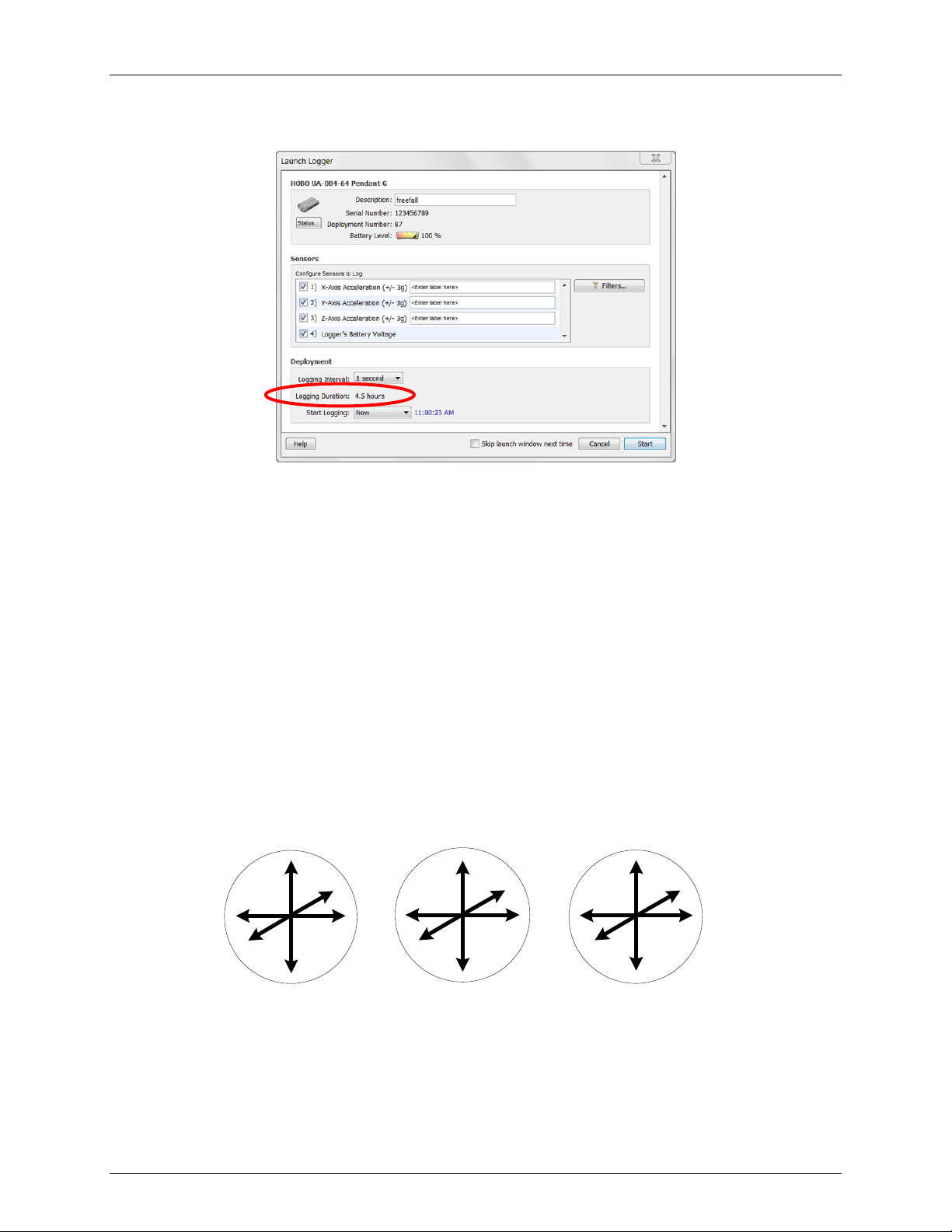
The logger header size will vary based on the logging parameters entered during launch. The fill time or “Logging
Duration” calculation is determined automatically by HOBOware and can be found in the Launch Logger window.
Tilt Sensing
The ability of the logger to perform tilt sensing relates to the type of accelerometer used and its construction.
Gravity acting on the mass of the beam inside the accelerometer creates a constant force that displaces the beam,
allowing it to measure the static acceleration of gravity (9.8m/s² or 1G). This is true even when the logger is sitting
motionless. As the logger orientation changes in space, gravity acts on each of the three axes, allowing it to be
used in applications to determine tilt, inclination, leveling, relative position, or orientation.
Tilt Angle Calculation
Tilt angle is not measured directly by the logger, but is processed in HOBOware when the data is offloaded. The
HOBOware Status window also displays the angle graphically and uses the following formula.
Tilt Angle = 180° – ArcCos (Acceleration in G’s)
Although the logger’s full scale range is from -3G to +3G, HOBOware performs a post-processing function
truncating values outside the -1G to +1G range for tilt angle reporting and leaving the original acceleration data
intact.
This formula assumes acceleration varies between -1G and +1G and generates corresponding angles between 0°
and 180° with the following orientation.
0°
-X
Z
-Y
-Z
X
90°
Y
-Z
180°
The frame of reference for tilt angle can be either a vertical or horizontal plane and is somewhat arbitrary. We
have chosen a vertical plane since it corresponds to the vector associated with gravity.
0°
Y
-Y
180°
0°
X
Z
Y
90°
X
-Z
-X
180°
Z
90°
-Y
When any of the three logger axes is pointing toward earth, for the sake of discussion using X, the measured
acceleration will be 1G with a corresponding calculated tilt angle of 180°. When in a horizontal position, a 0G
measurement corresponds to 90°. When pointing up (away from earth), a -1G measurement gives 0°.
1-800-LOGGERS 4 www.onsetcomp.com
Page 5

HOBO Pendant G White Paper
Tilt Orientation: Examples of HOBOware Status Window
These are examples of different logger orientations and corresponding HOBOware Status window screens.
1-800-LOGGERS 5 www.onsetcomp.com
Page 6

HOBO Pendant G White Paper
Tilt Orientation: Example Data File
This is an example data file captured with the same logger orientations as the Status window examples in the
previous section. The logger was launched and placed on a flat surface. Its orientation was changed at different
intervals during the logging period by rotating the logger 90°. The correlation between acceleration in G and its
corresponding tilt angle can be seen quite clearly. Each of the three axes (X, Y, Z) has been graphed separately for
clarity.
X Axis
Y Axis
1-800-LOGGERS 6 www.onsetcomp.com
Page 7

Z Axis
HOBO Pendant G White Paper
Absolute Positioning
Although tilt angle can be determined, rotational information cannot be obtained. In other words, its absolute
spatial orientation or absolute location in space cannot be known.
To prove this, you can position the logger in a fixed orientation and slowly rotate about the vertical axis a full 360°.
Note that none of the values change during the rotation (assuming this is done slow enough to avoid vibration or
shock). The logger cannot sense what quadrant it is in.
1-800-LOGGERS 7 www.onsetcomp.com
Page 8

HOBO Pendant G White Paper
Tilt Accuracy
The accuracy of the tilt angle varies based on the accelerometer output and temperature changes. This graph
shows the relationship between accelerometer output and tilt angle. This cosine function yields a more accurate
angle where the slope changes rapidly, occurring between 60° to 120°. Less accurate results occur as the slope
decreases in the 0° to 30° and 150° to 180° range.
Plot B: Accelerometer Output vs. Orientation Angle
Using the logger’s accuracy specification of ±0.075G (ambient) and ±0.105G (over temp), this graph quantifies the
tilt error as a function of tilt angle from 0° to 90°. This graph can be mirrored, horizontally, to determine the error
from 90° to 180°.
30.00
25.00
20.00
Error
15.00
10.00
Tilt Error (+/- Degrees)
5.00
0.00
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90
Tilt Angle (Degrees)
@25C
Plot C: Accelerometer Tilt Angle vs. Error
1-800-LOGGERS 8 www.onsetcomp.com
Page 9

HOBO Pendant G White Paper
Tilt Resolution
Similar to tilt accuracy, tilt resolution varies depending on the accelerometer output. Using the logger resolution
specification of ±0.025G, this graph quantifies the tilt resolution as a function of tilt angle from 0° to 180°.
14.00
12.00
10.00
8.00
6.00
4.00
Resolution (Degrees)
2.00
0.00
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
Tilt Angle (Degrees)
Plot D: Accelerometer Tilt Resolution
Tilt and Dynamic Acceleration
In addition to the force gravity imparts on the internal beam of the accelerometer, it is also sensitive to forces
applied through movement, shock, and vibration events. The logger does not differentiate between these events,
but measures the combined effects. As such, obtaining tilt information when the logger undergoes changes in both
tilt orientation and dynamic acceleration can be more involved. The details of these dynamic events are better
suited for “Fast Mode” logging. However, the effects can be observed as undesirable in “Normal Mode” logging.
In the following example, the logger (in normal mode) maintained a constant orientation but was subjected to a
number of movement events, depicted by black arrows, in the x axis. The first movement (away from earth) adds
to the constant force due to gravity, depicted by red arrows, resulting in an increase in acceleration. The second
movement (toward earth) subtract from the effects of gravity resulting in a decrease in acceleration. The third
movement (away from earth) is comprised of two components, an increase and decrease in acceleration which
compliments and opposes gravity by adding to and subtracting from it, respectively. The fourth movement is like
the first.
1-800-LOGGERS 9 www.onsetcomp.com
Page 10

HOBO Pendant G White Paper
We can see the truncation effects of the tilt formula as all values above +1G in Events 1, 3, and 4 show a
corresponding clipped tilt angle of 180°. Event 2 illustrates how data can be misinterpreted as the angle appears to
have changed from about 180° to 150° although the logger orientation remained unchanged.
1
34
2
X Axis: Normal Mode
By looking at data from the Y and Z axis, we can determine its cause. Since the Y and Z axes do not have a
corresponding change in tilt angle, we can deduce the cause as being from a dynamic acceleration event and not a
tilt event.
Y Axis: Normal Mode
1-800-LOGGERS 10 www.onsetcomp.com
Page 11

Z Axis: Normal Mode
HOBO Pendant G White Paper
A better approach is to devise a way of separating the static and dynamic components of accelerometer, discussed
in next section.
Dynamic Acceleration: Fast Mode
Dynamic acceleration events from movement, vibration, and shock can be captured when the logger is in “fast
mode” (the Logging Interval has been set to “Fast” in HOBOware). The events to be measured should not exceed
half the logging frequency. This allows sampling to occur twice as fast at the event. So, for example, with a logging
frequency of 100Hz, events should not exceed 50Hz.
As mentioned in the last section, dynamic acceleration is difficult to analyze when combined with the static effect
due to gravity. Separating the two involves using post-processing filter functions. Many filtering functions and
techniques exist for doing this with varying degrees of complexity and accuracy.
1-800-LOGGERS 11 www.onsetcomp.com
Page 12

HOBO Pendant G White Paper
Example File
The following file was generated with the logger in “Fast Mode” @ 100Hz. Each of the three axes was aligned with
the gravity vector while at the same time injecting an oscillatory vibration along the same vector.
X Axis: Fast Mode
Y Axis: Fast Mode
1-800-LOGGERS 12 www.onsetcomp.com
Page 13

Z Axis: Fast Mode
HOBO Pendant G White Paper
Low Pass Filter
A basic low pass filter can be achieved using the following formula.
[]= []0.1+[−1]1−0.1
A “filter factor” of 0.1 is used which results in a low pass value equal to 10% of the acceleration + 90% of the
previous filtered value. The filter factor can be modified as needed.
-2
1
43
X,lowpass
85
127
169
211
253
295
337
2
0
2
0
1
379
-2
43
85
Y, l o w p a s s
127
169
211
2
0
1
253
295
337
379
-2
Z,lowpass
43
85
127
169
211
253
295
337
High Pass Filter
A corresponding high pass filter can be achieved using formula.
ℎ[]= []+[]
2
X,highpass
2
Y,highpass
2
Z,highpass
379
0
1
54
107
160
213
266
319
372
-2
This leads to a decent isolation but results in high pass errors from the low pass transitions.
1-800-LOGGERS 13 www.onsetcomp.com
0
1
48
95
142
189
236
283
330
377
-2
-2
0
1
48
95
142
189
236
283
330
377
Page 14

w
Sliding Average
Another approach to filtering uses a sliding average.
[]=
ℎ[]= []−[]
1
[+
HOBO Pendant G White Paper
]
-2
-2
2
X,lowpass
0
1
48
95
142
189
236
283
330
377
2
X,highpass
2
Y, l o w p a s s
0
1
48
95
142
189
236
283
330
377
-2
2
Y,highpass
0
1
54
107
160
213
266
319
372
0
1
-2
-2
2
Z,lowpass
0
1
54
107
160
213
266
319
372
2
Z,highpass
0
1
48
95
142
189
236
283
330
377
Sum Vector
The sum vector is useful when working with objects in freefall. It isn’t measure by the logger but calculated by the
host software for reporting in both the data file and status window using the following formula:
Sum Vector = √(X²+Y²+Z²)
As an example, assume we start with a logger at rest measuring 1G (X). When allowed to freefall, the logger
accelerates toward earth producing a decrease in the X axis output of 1G resulting in a sum of 0G.
Note that any rotation during free fall will induce a centripetal acceleration about the axis of rotation so all axes
may not read 0G.
1-800-LOGGERS (564-4377) • 508-759-9500
ww.onsetcomp.com • loggerhelp@onsetcomp.com
© 2013 Onset Computer Corporation. All rights reserved. Onset, HOBO, Pendant, and
HOBOware are trademarks or registered trademarks of Onset Computer Corporation.
Patent # 6,826,664 16920-A
 Loading...
Loading...