

Page 1

SERVOSYSTÈMES SÉRIE G
Moins de câbles, plus d'espace et de temps
Un format compact »
MECHATROLINK-II »
Des performances optimisées »
Page 2

Moins de câbles, plus d'espace et de temps
Compact par la taille
riche par les fonctionnalités
L'application pour laquelle vous utilisez la
machine a toujours la priorité, c'est pourquoi
les servosystèmes série G vous offrent des
fonctionnalités supplémentaires pour étendre
les possibilités de votre machine de manière
plus rapide, plus souple et plus efficace.
Parmi les nouvelles caractéristiques, citons le
temps de réponse réduit, la gamme plus large
de servosystèmes ainsi que le réglage
automatique rapide et intuitif : la solution est
donc adaptée à de nombreuses applications,
avec la qualité et l'assistance que vous êtes
en droit d'attendre d'Omron.
Caractéristiques et avantages
principaux :
• Servomoteur en format de poche très
peu encombrant (x cm)
• Réglage automatique pour un démarrage
aisé et rapide
• Bus MECHATROLINK-II intégré réduisant le
câblage et permettant la configuration et
le diagnostic du servosystème à distance
• Couple de démarrage élevé : % en s.
• Contrôle du positionnement, de la vitesse
et du couple
• Alimentation en énergie et alimentation
de commande séparées
• Positionnement rapide et précis
•
Gamme de servomoteurs allant de W à , kW
• Codeur incrémentiel et absolu disponible
• Servomoteurs cylindriques et plats
avec un régime allant jusqu'à tr/min
• Compatible avec les servomoteurs SmartStep
• Suppression des vibrations
Avant : de nombreux câbles
Après : un seul câble
MECHATROLINK-II
Une connexion facilitée par l'utilisation d'un
seul câble !
Grâce au bus MECHATROLINK-II intégré, il suffit d'un
seul câble pour relier les servomoteurs entre eux.
De cette façon, non seulement le câblage et le temps
d'installation sont réduits, mais les risques d'erreurs
de connexion sont également considérablement
moindres. La connexion à un seul câble est bien
plus solide qu'une solution à plusieurs câbles,
ce qui garantit une fiabilité accrue.
Réglage automatique simple et rapide
Les graphiques illustrent un profil de mouvement avec un
servosystème série G dans une application où le rapport d'inertie
est de 16:1. Les réglages peuvent être facilement effectués à l'aide
du CX-Drive en une minute seulement.
Il en résulte un contrôle irréprochable, gage d'un fonctionnement
optimal du servosystème et donc de la machine, même si l'utilisateur
est néophyte.
Une fois en marche, la fonction de réglage automatique en temps
réel intégrée assure le fonctionnement du servosystème en fonction
de l'inertie de charge, garantissant là encore la qualité de la pièce
produite.
De plus, de nombreux filtres de suppression et filtres coupe-bande
sont disponibles pour supprimer les vibrations de la machine, quel
que soit le sens de fonctionnement.
Avant réglage automatique
Vitesse
Après réglage automatique
Vitesse de commande
Vitesse
Vitesse de commande
Couple
Couple
Page 3

Série G + NCF : un positionnement
optimal jusqu'à 16 axes
Système de positionnement complet
et compact
Vous pouvez bénéficier d'un système PTP complet
et puissant dans un minimum d'espace en associant
l'unité CJ1W-NCF71 et le servo de la série G. Cette
configuration offre un positionnement 16 axes avec
interpolation circulaire et linéaire, ainsi que la gestion
d’interruptions. L'association NCF + série G constitue
la solution idéale pour les applications où l'espace
est réduit.
Transparence totale depuis un hôte distant
Lorsque le servosystème série G est commandé par
l'unité de positionnement NCF, le servomoteur est
entièrement transparent pour un PC distant. Cette
transparence est due à la transmission des signaux du
servomoteur série G à l'API via le bus MECHATROLINK-II
et via toute liaison série ou Ethernet entre l'API et le PC,
d'où une intégration parfaite à Omron Smart Platform.
PLCopen
PLCopen est une norme internationale relative à la
programmation de commandes industrielle qui fournit
une interface de programmation normalisée afin
d'harmoniser la conception et le fonctionnement
des commandes industrielles.
NCF – caractéristiques
et avantages principaux
• Contrôleur de position point à point
axes sur le ML II
• Évolutivité des systèmes avec des
modèles pour , ou axes
• Configuration facile, rapide et fiable
• Optimisé pour les applications de
positionnement
• Câblage simplifié vers les servomoteurs
• Intégration avec Omron Smart Platform
CJW-NC
axes
CJW-NC
axes
CJW-NCF
axes
Jusqu’à 16 axes
Page 4
R88D-GN@/R88M-G@
Servosystème série G
Compact par la taille, riche par les fonctionnalités.
Moins de câbles, plus d'espace et de temps.
• Bus de mouvement MECHATROLINK-II intégré
• Contrôle de position, de vitesse et de couple
• Fréquence de réponse élevée de 1 kHz
• Réglage automatique en temps réel
• Suppression des vibrations
• Alimentation en énergie et alimentation de commande
séparées
• Moteurs disponibles dotés d'un codeur absolu et incrémental
(17 bits) pour une plus grande précision
• Servomoteurs cylindriques et plats avec un régime allant
jusqu'à 3 000 tr/min
• Servomoteurs pris en charge par les servodrivers
SmartStep2, série G et série G5
• Couple pic : 300% du couple continu pendant 3 secondes ou
plus en fonction du modèle
• IP65 et joint d'huile d'arbre disponible
Puissances
• 230 Vc.a. monophasé 100 W à 1,5 kW (8,62 Nm)
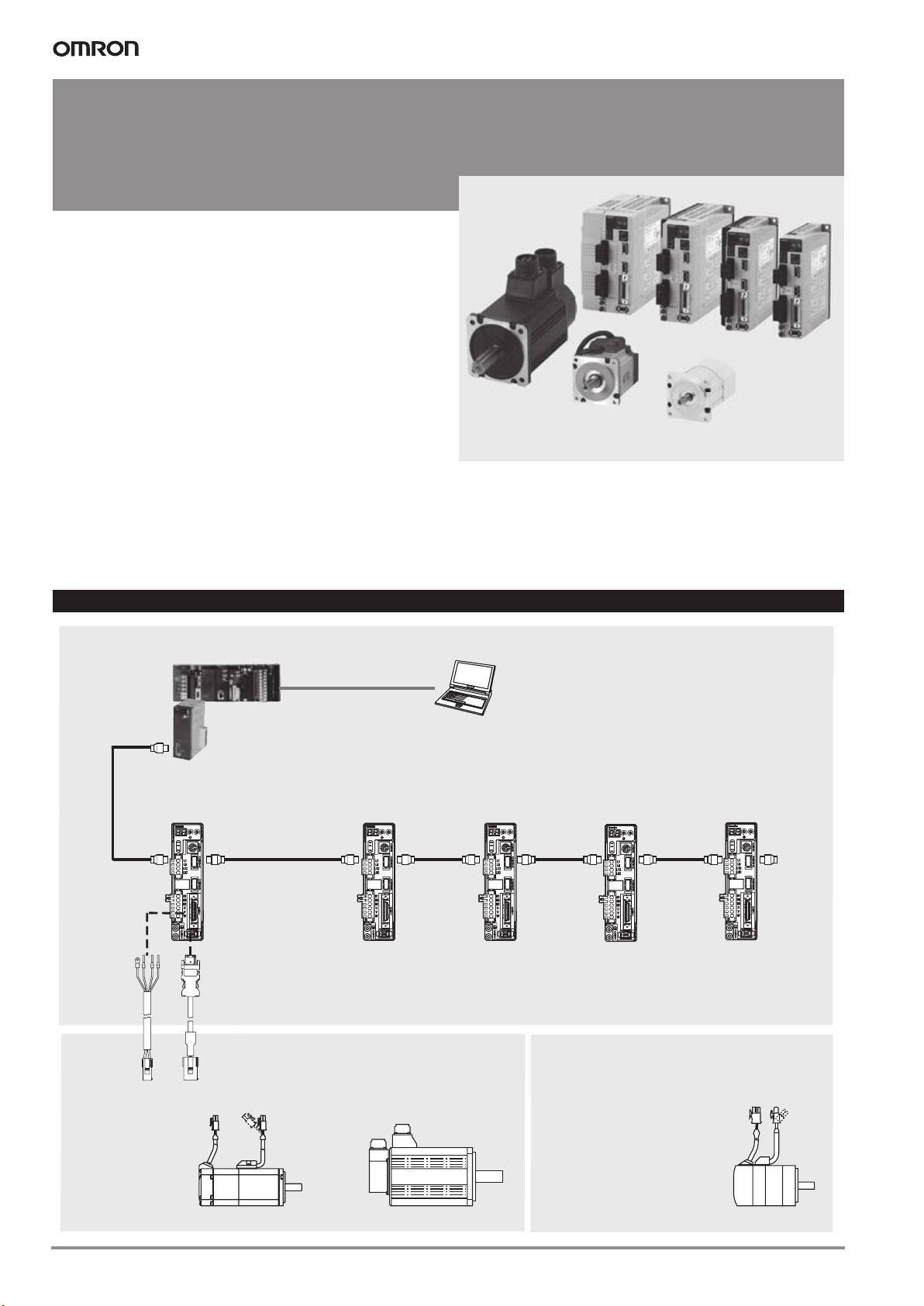
Configuration du système
Configuration du servomoteur MECHATROLINK-II série G
Unité de contrôle de position
CJ1W-NC_71
CS1W-NC_71
Contrôleur d'axe
TJ1-MC04/16
CJ1W-MCH72
Câble
d'alimentation
Servomoteur
série G
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
Câble
du codeur
MECHATROLINK-II
Servomoteur
série G
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
Logiciel
informatique : CX-One
Servomoteur
série G
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
Servomoteur
série G
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
Servomoteur
série G
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
Terminaison
Servomoteur série G
Servomoteurs cylindriques
Servomoteur série G
Servomoteurs plats (100-400 W)
(50-1 500 W)
6 Servomoteurs c.a.
Page 5

Légende des références
Servodriver
R88D-GN04H-ML2
Servodriver série G
N : type réseau
Capacité
100 W
01
200 W
02
04
400 W
08
750 W
1,0 kW
10
15
1,5 kW
Modèle
ML2 : communications MECHATROLINK-II
Tension source
H : 230 V
Caractéristiques des servodrivers
Servodriver série G
Modèle de servodriver R88D-GN@ 01H-ML2 02H-ML2 04H-ML2 08H-ML2 10H-ML2 15H-ML2
Servomoteur
applicable
Puissance moteur applicable max W 100 200 400 750 1 000 1 500
Courant de sortie continu Arms 1,16 1,6 2,7 4,0 5,9 9,8
Courant de sortie max Arms 3,5 5,3 7,1 14,1 21,2 28,3
Circuits d’alim. Circuit principal Monophasé, 200 à 240 Vc.a. +10 à -15%
Alimentation Circuit de contrôle
Méthode de contrôle Méthode MLI contrôlée par IGBT
Rétroaction Codeur série (incrémental/absolu)
Température de fonctionnement/stockage 0 à +55°C/-20 à 65°C
Humidité de fonctionnement/stockage 90% ou moins (sans condensation)
Altitude 1 000 m maximum au-dessus du niveau de la mer
Caractéristiques de base
Résistance aux vibrations/chocs 5,88 m/s
Conditions
Configuration Monté sur base
Poids approximatif kg 0,8 1,1 1,5 1,7
Plage de contrôle de la vitesse 1:5 000
Variance de
vitesse
Caractéristiques de fréquence 1 kHz
Précision du contrôle de couple (reproductibilité) ±3% (de 20% à 100% du couple nominal)
Performances
Paramètres de temps du démarrage en douceur 0 à 10 s (les temps d'accélération et de décélération peuvent être réglés)
Communications
MECHATROLINK
R88M-G@ 05030@/10030@ 20030@ 40030@ 75030@ G1K020T@ 90010T@ / 1K030T@ /
R88M-GP@ 10030@ 20030@ 40030@ - - -
(50/60 Hz)
Monophasé, 200 à 240 Vc.a. +10 à -15% (50/60 Hz)
2
Variance de charge Pendant 0 à 100% de la charge ±0,01 max. (à la vitesse nominale)
Variance de tension 0% à ±10% de la tension nominale (à la vitesse nominale)
Variance de température 0 à 50ºC ±0,1% max. (à la vitesse nominale)
Commandes MECHATROLINK-II
(pour séquence, mouvement, paramétrage/référence des données, surveillance, réglage et autres
commandes)
/19,6 m/s
2
Monophasé/triphasé, 200 à 240 Vc.a. +10 à -15%
(50/60 Hz)
1K5@0T@
Entrée commande
Mode de contrôle de position/vitesse/couple
Signal d'entrée de séquence Arrêt d'urgence, 3 signaux de verrouillage externes, limite de couple avant/inversé, interdiction de marche
Signal de sortie de séquence Il est possible de sortir 3 types de signaux : positionnement terminé, coïncidence de vitesse, détection de
Signal d’E/S
avant/inversée, proximité d'origine, 3 entrées d'utilisation générale
vitesse de rotation, servo prêt, limite de courant, limite de vitesse, relâchement du frein et signal
d'avertissement
Servosystème série G 7
Page 6
Modèle de servodriver R88D-GN@ 01H-ML2 02H-ML2 04H-ML2 08H-ML2 10H-ML2 15H-ML2
Servomoteur
applicable
R88M-G@ 05030@/10030@ 20030@ 40030@ 75030@ G1K020T@ 90010T@ / 1K030T@ /
1K5@0T@
R88M-GP@ 10030@ 20030@ 40030@ - - -
Communications
RS-232
Communications
MECHATROLINK
Interface Ordinateur
Vitesse de transmission De 2 400 à 57 600 bps
Fonctions Réglage de paramètres, affichage de l'état, affichage d'alarme (surveillance, effacement, historique), fonction
Protocole de
communications
de tracé des données du servodriver, opérations de test/réglage automatique, tracé en temps réel, paramètre
de codeur absolu, valeurs par défaut
MECHATROLINK-II
Vitesse de transmission 10 Mbps
Communications
Longueur des données 17 octets et 32 octets
Fonctions Réglage de paramètres, affichage de l'état, affichage d'alarme (surveillance, effacement, historique), valeurs
par défaut
Détection d’inertie de charge automatique Mode axe horizontal et vertical. Un paramètre de configuration de rigidité.
Frein dynamique (DB) Fonctionne en cas de coupure de l’alimentation principale, alarme servo, dépassement de course ou servo
OFF
Traitement régénérateur Résistance de régénération intégrée dans les modèles de 750 W à 1,5 kW. Résistance de régénération
Fonction de prévention de dépassement (OT) Frein dynamique, désactive le couple ou couple d'arrêt d'urgence pendant le fonctionnement POT et NOT
Fonctions intégrées
Arrêt d'urgence (STOP) Entrée d'arrêt d'urgence
externe en option.
Fonction de diviseur de codeur Impulsions de division optionnelles possibles
Réducteur électronique 0,01<Numérateur/Dénominateur<100
Fonction de réglage de la vitesse interne 8 vitesses internes
Fonctions de protection Surtension, sous-tension, surintensité, surcharge, surcharge de régénération, surchauffe du servodriver
Sortie Moniteur analogique La vitesse, la vitesse de commande, le couple et le nombre d'impulsions cumulées réels du servomoteur
peuvent être mesurés avec un oscilloscope ou un autre équipement.
Panneau de commande Fonctions d'affichage Un affichage 2 chiffres LED à 7 segments indique l'état du servodriver, les codes d'alarme, paramètres, etc.
Voyant d'état des communications MECHATROLINK-II (COM)
Interrupteurs Commutateur rotatif pour régler l'adresse de nœud MECHATROLINK-II
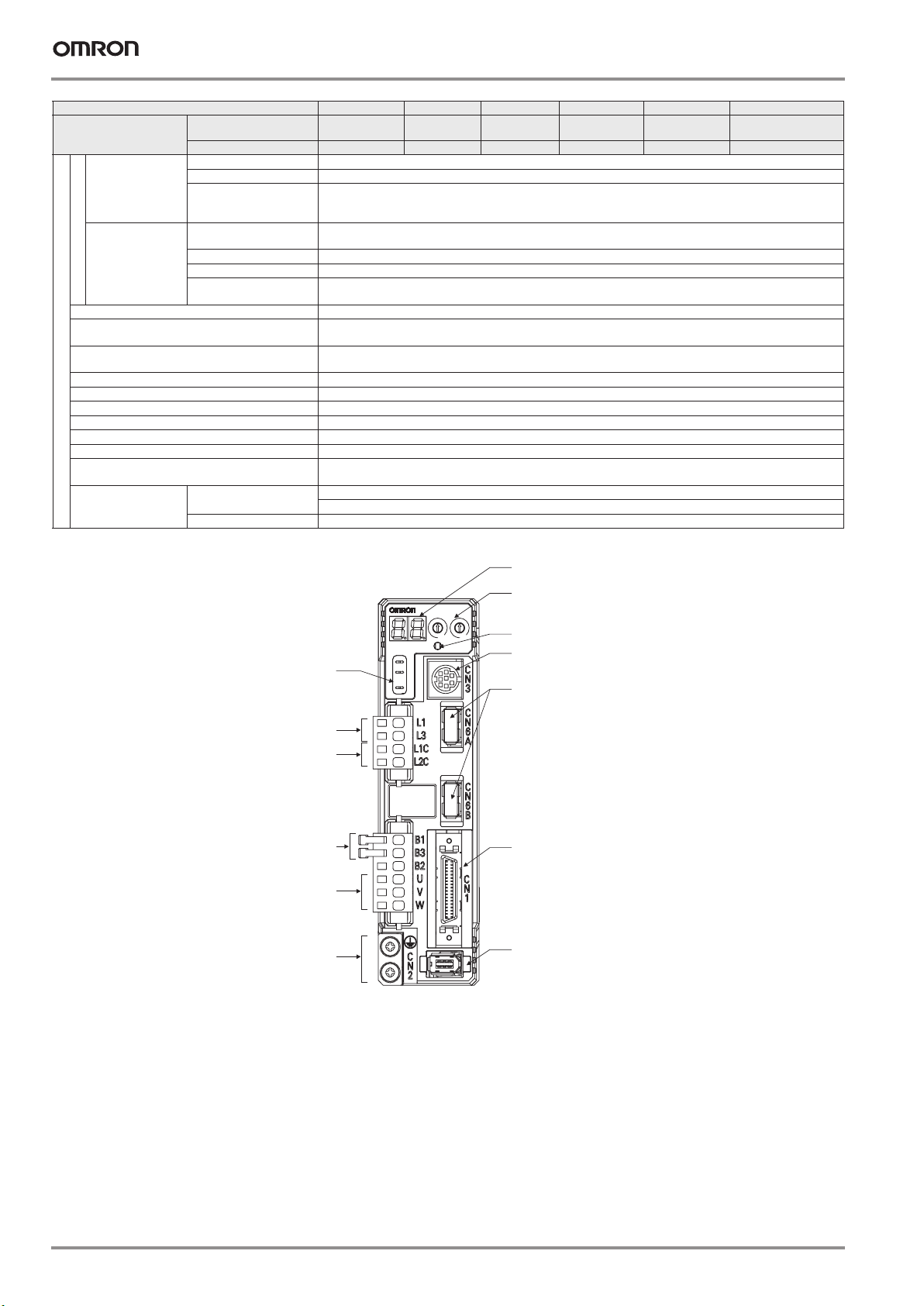
Noms des éléments du servodriver
Zone d’affichage
Commutateurs rotatifs
pour adresse de nœud ML-II
3
Voyant d'état des
communications ML-II
Connecteur de communications RS-232 (CN3)
Connecteur de communications ML-II
(CN6A, CN6B)
Broches pour moniteur analogique
(SP, IM, G)
AC SERVO DRIVE
ADR
0
0
1
1
9
2
2
8
3
7
4
6
5
X10
X1
COM
SP
IM
G
Bornes d'alimentation du circuit principal
Bornes d'alimentation du circuit de contrôle
Bornes de connexion de la résistance
de régénération externe (B1, B2, B3)
Bornes de connexion du servomoteur
(L1, L2, L3)
(L1C, L2C)
(U, V, W)
Bornes de la masse de protection
Connecteur d’E/S de contrôle (CN1)
Connecteur du codeur (CN2)
8 Servomoteurs c.a.
Page 7

Dimensions
Servodrivers
R88D-GN01H-ML2/GN02H-ML2 (200 V, 100 à 200 W)
40
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
13270
4
Deux, M4
150
R88D-GN04H-ML2 (200 V, 400 W)
55
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
150
150
±0,5
28
6
140
40
13270
±0,5
4
150
Deux, M4
±0,5
140
R88D-GN08H-ML2 (200 V, 750 W)
65
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
150
±0,5
436
55
17270
4
150
±0,5
507,5
Deux, M4
±0,5
140
65
Servosystème série G 9
Page 8

R88D-GN10H-ML2 / GN15H-ML2 (200 V, 1 kW à 1,5 kW )
85
AC SERVO DRIVER
ADR
0
0
1
1
9
2
2
8
3
3
7
4
6
5
X10
X1
COM
SP
IM
G
150
Légende des références
Servomoteur
R88M-GP10030H-BOS2
17270
4
Deux, M4
150
±0,5
707,5
±0,5
140
85
Servomoteur série G
Type de moteur
Vide : type cylindrique
P : type plat
Capacité
050
50 W
100 W
100
200
200 W
400 W
400
750 W
750
900
900 W
1K0
1 kW
1K5
1,5 kW
Vitesse nominale (tr/min)
10
1 000
20
2 000
30
3 000
Spécifications d'extrémité d'arbre
Arbre droit, sans clavette
Vide
Droit, clavette, fileté
S2
Spécifications d’étanchéité à l'huile
Pas de joint pour l'huile
Vide
Joint pour l'huile
O
Spécifications de frein
Sans frein
Vide
Frein
B
Tension et spécifications du codeur
H : 230 V avec codeur incrémental
T : 230 V avec codeur absolu
10 Servomoteurs c.a.
Page 9

Caractéristiques du servomoteur
Servomoteurs cylindriques 3 000/2 000/1 000 tr/min
Valeurs nominales et caractéristiques
Tension appliquée 230 V
Puissance nominale W 50 100 200 400 750 1 000 1 500 1 000 1 500 900
Couple nominal N·m 0,16 0,32 0,64 1,3 2,4 3,18 4,77 4,8 7,15 8,62
Couple pic instantané N·m 0,45 0,90 1,78 3,67 7,05 9,1 12,8 13,5 19,6 18,4
Courant nominal A (rms) 1,1 1,6 2,6 4 7,2 9,4 5,6 9,4 7,6
Courant max. instantané A (rms) 3,4 4,9 7,9 12,1 21,4 28,5 17,1 28,5 17,1
Vitesse nominale min
Vitesse max. min
Constante de couple N·m/A (rms) 0,14 0,19 0,41 0,51 0,64 0,44 0,51 0,88 0,76 1,13
Moment d'inertie du rotor (JM) kg·m
Moment d'inertie de charge autorisé (JL) Multiple de (JM) 30 20 15 10
Taux de puissance kW/s 10,4 20,1 30,3 62,5 66 60 88 37,3 45,8 66,3
Codeur applicable Codeur incrémental (10 000 impulsions) -
Charge radiale autorisée N 68 245 392 490 686
Charge axiale autorisée N 58 98 147 196
Masse approximative kg (sans frein) 0,3 0,5 0,8 1,2 2,3 4,5 5,1 6,8 8,5
Tension nominale 24 Vc.c. +/-5% 24 Vc.c. +/-10%
Moment d'inertie du frein de maintien Jkg·m
Consommation de puissance (à 20°C) W 7 9 10 18 19 14 19
Consommation de courant (à 20°C) A 0,3 0,36 0,42 0,74 0,81 0,59 0,79
Couple de friction statique N·m (minimum) 0,29 1,27 2,45 4,9 7,8 4,9 13,7
Temps de montée pour couple de
maintien
Spécifications de frein
Temps de relâchement ms (max.) 20 15 20 15 70 50
Puissance Continue
Degré d'isolation Type B Type F
Température de fonctionnement/stockage ambiante 0 à +40°C/ -20 à 65°C 0 à +40°C/ -20 à 80°C
Humidité de fonctionnement/stockage ambiante 85% max. (sans condensation)
Classe de vibration V-15
Résistance d'isolement 20 MΩ min. à 500 Vc.c. entre les bornes d'alimentation et la borne FG
Boîtier IP65 entièrement fermé à auto-refroidissement (à l'exception de l’ouverture de l’arbre et des extrémités des
Résistance aux vibrations Accélération des vibrations 49 m/s² Accélération des vibrations 24,5 m/s²
Caractéristiques de base
Montage Monté avec bride
Caractéristiques de couple-vitesse
R88M-G05030H/T (50 W)
(N·m)
0,5
0,45
Utilisation répétée
0,25
0,16 0,16
Utilisation continue
0 1 000 2 000 3 000 4 000
Servomoteur R88M-@ G05030@ G10030@ G20030@ G40030@ G75030@ G1K030T G1K530T G1K020T G1K520T G90010T
-1
-1
2
-4
x10
0,025 0,051 0,14 0,26 0,87 1,69 2,59 6,17 11,2
5 000 4 500 5 000 3 000 2 000
3 000 2 000 1 000
Codeur incrémental/absolu (17 bits)
kg (avec frein) 0,5 0,7 1,3 1,7 3,1 5,1 6,5 8,7 10,1 10
2
-4
x10
0,002 0,018 0,075 0,25 0,33 1,35
ms (max.) 35 50 70 50 80 100
câbles)
0,45
5 000
(tr/mn)
0,1
R88M-G10030H/T (100 W)
(N·m)
0,93
1,0
Utilisation répétée
0,5
0,320,32
Utilisation continue
0 1 000 2 000 3 000 4 000
0,93
0,28
5 000
(tr/mn)
R88M-G20030H/T (200 W) R88M-G40030H/T (400 W)
(N·m)
1,78
2,0
Utilisation répétée
1,0
0,64 0,64
Utilisation continue
0 1 000 2 000 3 000 4 000 5 000
1,78 (4 500)
(tr/mn)
(N·m)
4,0
1,5
0,38
3,6
Utilisation répétée
2,0
1,3 1,3
Utilisation continue
0 1 000 2 000 3 000 4 000
3,6 (3 800)
1,7
0,78
5 000
(tr/mn)
R88M-G75030H/T (750 W) R88M-G1K030T (1 kW)
(N·m)
7,05
8,0
Utilisation répétée
4,0
2,4 2,4
Utilisation continue
0 1 000 2 000 3 000 4 000
7,05 (3 600)
R88M-G1K520T (1,5 kW)
(N·m)
19,6
20
10
7,15 7,15
0
19,6 (2 200)
Utilisation répétée
Utilisation continue
1 000 2 000
14,3
4,7
3 000
4,0
1,0
5 000
(tr/mn)
(tr/mn)
(N·m)
9,1
10
Utilisation répétée
5
3,183,18
Utilisation continue
0 1 000 2 000 3 000 4 000
9,1 (3 600)
R88M-G90010T (900 W)
18,4
(N·m)
20
10
0
18,4 (1 600)
Utilisation répétée
8,62 8,62
Utilisation continue
1 000
10,0
4,31
2 000
4,8
5 000
(tr/mn)
(tr/mn)
R88M-G1K530T (1,5 kW)
(N·m)
12,9
15
Utilisation répétée
7,5
4,77 4,77
Utilisation continue
0 1 000 2 000 3 000 4 000 5 000
12,9 (3 500)
(tr/mn)
R88M-G1K020T (1 kW)
(N·m)
13,5
15
10
4,8 4,8
5
3,6
0 1 000 2 000
13,5 (2 200)
Utilisation répétée
Utilisation continue
3 000
5,5
3,2
(tr/mn)
Servosystème série G 11
Page 10

Servomoteurs plats 3 000 tr/min
Valeurs nominales et caractéristiques
Tension appliquée 230 V
Servomoteur R88M-@ GP10030@ GP20030@ GP40030@
Puissance nominale W 100 200 400
Couple nominal N·m 0,32 0,64 1,3
Couple pic instantané N·m 0,86 1,8 3,65
Courant nominal A (rms) 1 1,6 2,5
Courant max. instantané A (rms) 3,1 4,9 7,5
Vitesse nominale min
Vitesse max. min
Constante de couple N·m/A (rms) 0,34 0,42 0,54
Moment d'inertie du rotor (JM) kg·m
Moment d'inertie de charge autorisé (JL) Multiple de (JM) 20
Taux de puissance nominal kW/s 10,2 11,5 25,5
Codeur applicable Incrémental (10 000 impulsions)
Charge radiale autorisée N 68 245
Charge axiale autorisée N 58 98
Masse approximative kg (sans frein) 0,7 1,3 1,8
Tension nominale 24 Vc.c. +/-10%
Moment d'inertie du frein de maintien J kg·m
Consommation de puissance (à 20°C) W 7 10
Consommation de courant (à 20°C) A 0,29 0,41
Couple de friction statique N·m (minimum) 0,29 1,27
Temps de montée pour couple de maintien ms (max.) 50 60
Spécifications de frein
Temps de relâchement ms (max.) 15
Puissance Continue
Degré d'isolation Type B
Température de fonctionnement/stockage ambiante 0 à +40°C/ -20 à 80°C
Humidité de fonctionnement/stockage ambiante 85% max. (sans condensation)
Classe de vibration V-15
Résistance d'isolement 20 MΩ min. à 500 Vc.c. entre les bornes d'alimentation et la borne FG
Boîtier IP65 entièrement fermé à auto-refroidissement (à l'exception de l’ouverture de
Résistance aux vibrations Accélération des vibrations 49 m/s²
Caractéristiques de base
Montage Monté avec bride
-1
-1
2
-4
x10
kg (avec frein) 0,9 2 2,5
2
-4
x10
l’arbre et des extrémités des câbles)
0,1 0,35 0,64
Codeur incrémental/absolu (17 bits)
0,03 0,09
3 000
5 000
Caractéristiques de couple-vitesse
R88M-GP10030H/T (100W)
(N·m)
1,0
0,86
Utilisation répétée
0,5
0,32 0,32
Utilisation continue
0 1000 2000 3000 4000
0,86
0,19
5000
(tr/mn)
R88M-GP20030H/T (200W)
(N·m)
1,8
2,0
Utilisation répétée
1,0
0,64
Utilisation continue
0 1000 2000 3000 4000
0,64
1,8 (4500)
0,38
5000
(tr/mn)
R88M-GP40030H/T (400W)
(N·m)
4,0
3,65
Utilisation répétée
2,0
1,3 1,3
Utilisation continue
0 1000 2000 3000 4000
3,65 (3600)
2,0
0,78
5000
(tr/mn)
12 Servomoteurs c.a.
Page 11

Dimensions
Servomoteurs
Modèles cylindriques 3 000 tr/min (230 V, 50-100 W)
Dimensions (mm) Sans frein Avec frein LN Surface de bride Extrémité
Modèle LL LL D S B Sans frein Avec frein
R88M-G05030@-@S2 72 102 26,5 30
h7
d'arbre
h6
8
h9
3
R88M-G10030@-@S2 92 122 46,5 0,5 0,7
Masse approximative (kg)
0,3 0,5
LL
Connecteur de frein
Connecteur du servomoteur
25
36
200
LN
Deux,
4,3 de dia.
S
D
(Dimensions de l'extrémité
de l'arbre avec clavette et filetage)
14
12,5
40 × 40
32
46 de dia.
B
1,8
3
M3 x 6L (Filetage x Profondeur)
Connecteur
du codeur
230
Modèles cylindriques 3 000 tr/min (230 V, 200-750 W)
Dimensions (mm) Sans frein Avec frein LR KL1 Surface de bride Extrémité d'arbre Masse approximative (kg)
Modèle LL LL D1 D2 C G Z S QK B H T1 Filetage x
R88M-G20030@-@S2 79,5 116 30 43 70 50
R88M-G40030@-@S2 99 135,5 14
R88M-G75030@-@S2 112,2 149,2 35 53 90 70
Connecteur du frein
Connecteur
du codeur
LL LR
Connecteur du servomoteur
h7
60 6,5 4,5 11h618 4h94 2,5 M4x8L 0,8 1,3
h7
80 8 6 19h622 6h96 3,5 2,3 3,1
3G
h6
22,5 5h95 3 M5x10L 1,2 1,7
(Dimensions de l'extrémité de l'arbre
avec clavette et filetage)
profondeur
Sans frein Avec frein
220
200
Quatre,
diamètre Z
S
D2
KL1
C × C
D1 dia.
QK
H
B
T1
Filetage x Profondeur
Servosystème série G 13
Page 12

Modèles cylindriques 3 000, 2 000 et 1 000 tr/min (230 V, 900 kW - 1,5 kW)
Dimensions (mm) Sans frein Avec frein LR KL1 Surface de bride Extrémité d'arbre Masse approximative
Modèle LL LL D1 D2 D3 C G F Z S QK B H T1 Filetage x
R88M-G1K030T-@S2 175 200 55 98 100 80
R88M-G1K530T-@S2 180 205 103 115 95
R88M-G1K020T-@S2 150 175 118 145 110
h7
120 90 7 3 6,6 19h642 6h96 3,5 M5x12L 4,5 5,1
h7
135 100 10 9 5,1 6,5
h7
165 130 12 6 22h641 8h974 6,8 8,7
profondeur
R88M-G1K520T-@S2 175 200 8,5 10,1
R88M-G90010T-@S2 175 200 70 10
(kg)
Sans frein Avec frein
Connecteur du
servomoteur/frein
Connecteur
du codeur
84
LL LR
G
F
C × C
Quatre, diamètre Z
KL1
S
D1 dia.
D3 dia.
D2
(Dimensions de l'extrémité
de l'arbre avec clavette et filetage)
QK
Modèles plats 3 000 tr/min (230 V, 100 W - 400 W)
Dimensions (mm) Sans
frein
Modèle LL LL D1 D2 C F G Z S QK B H T1 Filetage x
R88M-GP10030H-@S2 60,5 84,5 25 43 70 50
R88M-GP10030T-@S2 87,5 111,5
R88M-GP20030H-@S2 67,5 100 30 53 90 70
R88M-GP20030T-@S2 94,5 127
R88M-GP40030H-@S2 82,5 115 14
R88M-GP40030T-@S2 109,5 142
Connecteur
du codeur
Avec
LR KL1 Surface de bride Extrémité d'arbre Masse approximative (kg)
frein
Connecteur du moteur
LL LR
h7
60 3 7 4,5 8h612,5 3h93 1,8 M3x6L 0,7 0,9
h7
80 5 8 5,5 11h618 4h94 2,5 M4x8L 1,3 2
Connecteur du frein
profondeur
h6
22,5 5h95 3,0 M5x10L 1,8 2,5
B
H
Sans frein Avec frein
T1
Filetage x
Profondeur
220
(Dimensions de l'extrémité de l'arbre
avec clavette et filetage)
G
200
F
S
Quatre,
diamètre Z
KL1
D2
(7)
(7)
C × C
D1 dia.
QK
B
T1
H
Filetage x Profondeur
14 Servomoteurs c.a.
Page 13

Installation
Monophasé, 230 Vc.a.
Disjoncteur thermique
L1
L2
L3
N
Contacteur
200 à 230 Vc.a.
monophasé
Résistance de
régénération *3
12 à 24 Vc.c.
Arrêt d'urgence
Verrouillage
externe 3
Verrouillage
externe 2
Verrouillage
externe 1
Entrée d'utilisation
générale 1
Filtre
antiparasite
*2
+24VIN
STOP
EXT3
EXT2
EXT1
IN1
L1
L3
L1C
L2C
B1
B3
B2
1
2
3
4
5
6
CNA
CNB
4,7 kΩ
1 kΩ
4,7 kΩ
1 kΩ
4,7 kΩ
1 kΩ
4,7 kΩ
1 kΩ
4,7 kΩ
1 kΩ
4,7 kΩ
Servodriver
série G
CN1
CNB
CN2
U
V
W
/ALM
15
Sortie d'alarme
16
ALMCOM
OUTM1
36
Sortie d'utilisation générale 1
35
OUTM1COM
OUTM2
29
Sortie d'utilisation générale 2
30
OUTM2COM
OUTM3
31
Sortie d'utilisation générale 3
OUTM3COM
32
Servomoteur
Codeur optique
Entrée limite
couple avant
Entrée limite
couple inverse
Entrée interdiction
fonctionnement
avant
Entrée interdiction
fonctionnement
inverse
Entrée proximité
d'origine
Entrée d'utilisation
générale 0
Entrée d'utilisation
générale 2
PCL
NCL
POT
NOT
DEC
IN0
IN2
1 kΩ
7
4,7 kΩ
1 kΩ
8
4,7 kΩ
1 kΩ
19
4,7 kΩ
1 kΩ
20
4,7 kΩ
1 kΩ
21
4,7 kΩ
34
Coque
33
BAT
BATCOM
FG
Batterie de secours *1
1 kΩ
22
4,7 kΩ
1 kΩ
23
*1 Connecter en cas d'utilisation d'un codeur absolu. Si une batterie de secours est connectée, un câble codeur avec une batterie n'est pas
nécessaire.
*2 Connecter B2-B3 pour les modèles avec une résistance de régénération intégrée (modèles à partir de 750 W).
*3 Si l'énergie régénératrice est importante, connectez une résistance de régénération externe entre B1-B2. Pour les modèles à partir de 750 W,
déconnectez B2-B3.
Servosystème série G 15
Page 14
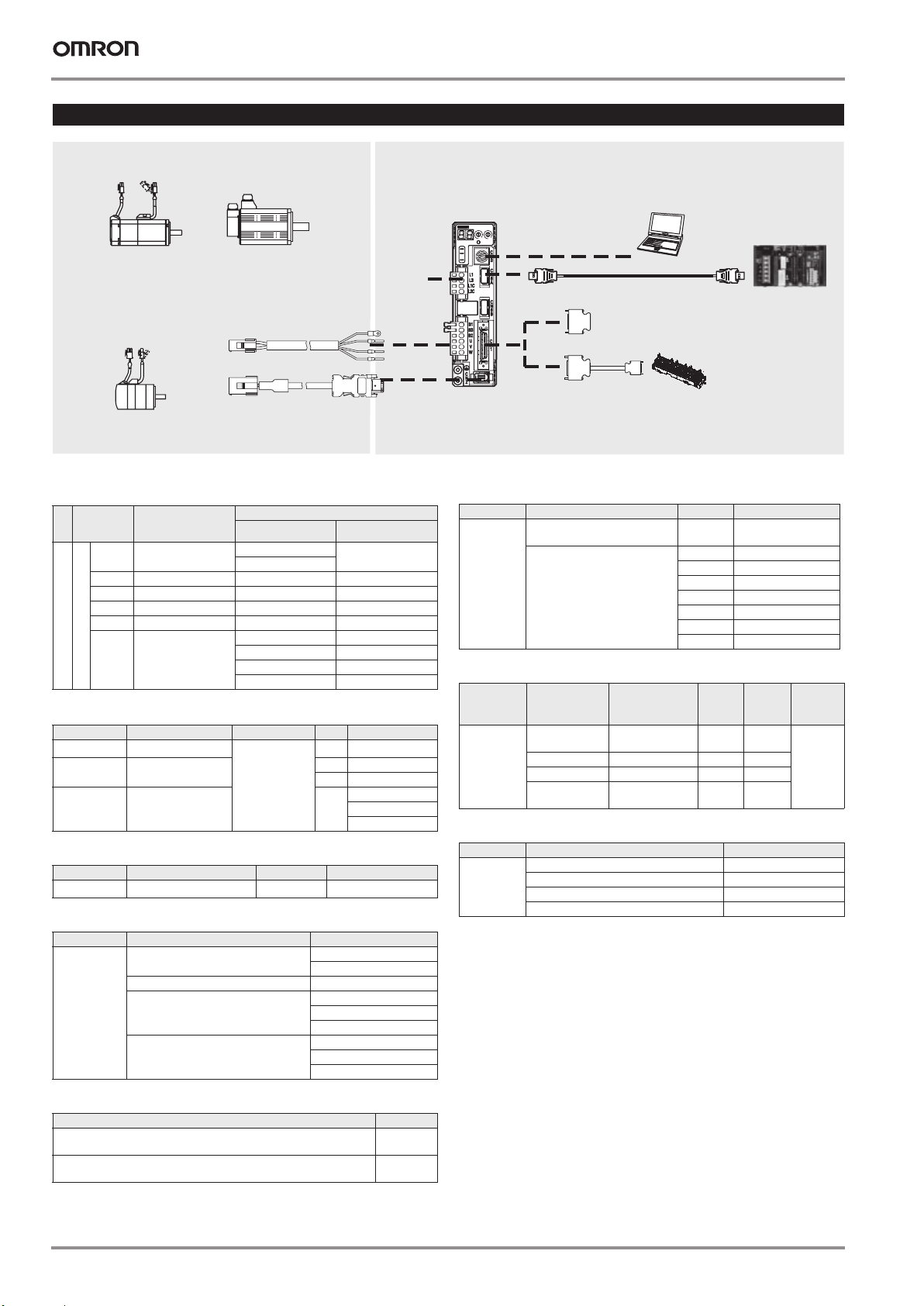
Références pour la commande
Résistance
régénérative
externe
e
A
Servomoteur cylindrique série G
B
Servodriver MECHATROLINK-II
série G
AC SERVO DRIVER
ADR
1
1
0
0
9
2
2
8
3
3
4
7
6
5
X10
X1
3 000 tr/min (50-750 W)
A
Servomoteur plat
série G
3 000 tr/min (100-400 W)
3 000 tr/min (1 000-1 500 W)
2 000 tr/min (1 000-1 500 W)
1 000 tr/min (900 W)
D
Câble d’alimentation
Câble codeur
C
Câbles de freinE
L
Filtre
M
Résistance
Résistance
régénérative
régénérative
externe
externe
COM
SP
CN3
IM
G
CN6
CN1
I
Câbles MECHATROLINK-II
K
Remarque : Les symboles ABCDE... indiquent la séquence recommandée pour sélectionner les composants d'un servosystème série G
Ordinateur PC :
Logiciel CX-One
F
Signaux d'E/S
du servodriver
G
Bornier
H
pour signaux d'E/S
servodriver
Contrôleurs d'axes
J
MECHATROLINK-II
Carte de contrôle de
position
CJ1W-NC_71
CS1W-NC_71
Carte de contrôle d’ax
TJ1-MC04/16
CJ1W-MCH72
Servodrivers
Caractéristiques
techniques
B
200 Vc.a. monophasé
Câbles de contrôle (pour CN1)
Symbole Nom Connecter à Modèle
F
G
H
Câble d'ordinateur (pour CN3)
Symbole Nom Modèle
I
Contrôleurs d’axe MECHATROLINK-II
Symbole Nom Modèle
J
Modèle de
servodriver
A Servomoteurs rotatifs compatibles
Type cylindrique Type plat
100 W R88D-GN01H-ML2 R88M-G05030@ R88M-GP10030@
R88M-G10030@
200 W R88D-GN02H-ML2 R88M-G20030@ R88M-GP20030@
400 W R88D-GN04H-ML2 R88M-G40030@ R88M-GP40030@
750 W R88D-GN08H-ML2 R88M-G75030@ -
1,0 kW R88D-GN10H-ML2 R88M-G1K020T@ -
1,5 kW R88D-GN15H-ML2 R88M-G90010T@ -
R88M-G1K030T@ -
R88M-G1K520T@ -
R88M-G1K530T@ -
Kit connecteurs d'E/S Signaux d'E/S
Câble bornier 1 m XW2Z-100J-B33
du servodriver
- R88A-CNU01C
2 m XW2Z-200J-B33
Bornier - XW2B-20G4
XW2B-20G5
XW2D-20G6
Câble d'ordinateur RS232 2 m R88A-CCG002P2
Contrôleur d'axes autonome Trajexia TJ1-MC04 (4 axes)
TJ1-MC16 (16 axes)
Contrôleur d'axes Trajexia-API CJ1W-MCH72
Carte de contrôle de position
pour API CJ1
CJ1W-NCF71 (16 axes)
CJ1W-NC471 (4 axes)
CJ1W-NC271 (2 axes)
Carte de contrôle de position
pour API CS1
CS1W-NCF71 (16 axes)
CS1W-NC471 (4 axes)
CS1W-NC271 (2 axes)
Câbles MECHATROLINK-II (pour CN6)
Symbole Caractéristiques techniques Longueur Modèle
K
Résistance de terminaison
MECHATROLINK-II
- JEPMC-W6022-E
Câbles MECHATROLINK-II 0,5 m JEPMC-W6003-A5-E
1 m JEPMC-W6003-01-E
3 m JEPMC-W6003-03-E
5 m JEPMC-W6003-05-E
10 m JEPMC-W6003-10-E
20 m JEPMC-W6003-20-E
30 m JEPMC-W6003-30-E
Filtres
Symbole Servomoteur
L
applicable
R88D-GN01H@
R88D-GN02H@
R88D-GN04H@ R88A-FIK104-RE 4,1 A 3,5 mA
R88D-GN08H@ R88A-FIK107-RE 6,6 A 3,5 mA
R88D-GN10H@
R88D-GN15H@
Modèle de filtre Courant
R88A-FIK102-RE 2,4 A 3,5 mA 250 Vc.a.
nominal
Courant
de fuite
Tension
nominale
monophasé
R88A-FIK114-RE 14,2 A 3,5 mA
Résistance régénérative externe
Symbole Modèle de résistance régénérative Caractéristiques
M
R88A-RR08050S 50 Ω, 80 W
R88A-RR080100S 100 Ω, 80 W
R88A-RR22047S 47 Ω, 220 W
R88A-RR50020S 20 Ω, 500 W
Logiciel PC
Caractéristiques techniques Modèle
Logiciel de configuration et de surveillance pour les servodrivers et
variateurs de fréquence (CX-Drive version 1.70 ou supérieure)
Suite logicielle complète Omron incluant CX-Drive
(CX-One version 3.10 ou supérieure)
CX-Drive
CX-One
16 Servomoteurs c.a.
Page 15

Servomoteurs cylindriques 3 000/2 000/1 000 tr/min (50 - 1,5 kW)
Symbole Caractéristiques techniques Modèle de
A
50-750 W
900-1 500 W
Tension Codeur et conception Vitesse Conception Couple
230 V Codeur incrémental
(10 000 impulsions)
Arbre droit avec clavette,
fileté
Codeur absolu/
incrémental (17 bits)
Arbre droit avec clavette,
fileté
3000min
2000min
1000min
-1
Sans frein 0,16 N·m 50 W R88M-G05030H-S2 R88D-GN01H-ML2
Avec frein 0,16 N·m 50 W R88M-G05030H-BS2 R88D-GN01H-ML2
Sans frein 0,16 N·m 50 W R88M-G05030T-S2 R88D-GN01H-ML2
Avec frein
-1
Sans frein 4,8 N·m 1 kW R88M-G1K020T-S2 R88D-GN10H-ML2
Avec frein 4,8 N·m 1 kW R88M-G1K020T-BS2 R88D-GN10H-ML2
-1
Sans frein 8,62 N·m 900 W R88M-G90010T-S2 R88D-GN15H-ML2
Avec frein R88M-G90010T-BS2 R88D-GN15H-ML2
nominal
0,32 N·m 100 W R88M-G10030H-S2 R88D-GN01H-ML2
0,64 N·m 200 W R88M-G20030H-S2 R88D-GN02H-ML2
1,3 N·m 400 W R88M-G40030H-S2 R88D-GN04H-ML2
2,4 N·m 750 W R88M-G75030H-S2 R88D-GN08H-ML2
0,32 N·m 100 W R88M-G10030H-BS2 R88D-GN01H-ML2
0,64 N·m 200 W R88M-G20030H-BS2 R88D-GN02H-ML2
1,3 N·m 400 W R88M-G40030H-BS2 R88D-GN04H-ML2
2,4 N·m 750 W R88M-G75030H-BS2 R88D-GN08H-ML2
0,32 N·m 100 W R88M-G10030T-S2 R88D-GN01H-ML2
0,64 N·m 200 W R88M-G20030T-S2 R88D-GN02H-ML2
1,3 N·m 400 W R88M-G40030T-S2 R88D-GN04H-ML2
2,4 N·m 750 W R88M-G75030T-S2 R88D-GN08H-ML2
3,18 N·m 1 kW R88M-G1K030T-S2 R88D-GN15H-ML2
4,77 N·m 1,5 kW R88M-G1K530T-S2 R88D-GN15H-ML2
0,16 N·m 50 W R88M-G05030T-BS2 R88D-GN01H-ML2
0,32 N·m 100 W R88M-G10030T-BS2 R88D-GN01H-ML2
0,64 N·m 200 W R88M-G20030T-BS2 R88D-GN02H-ML2
1,3 N·m 400 W R88M-G40030T-BS2 R88D-GN04H-ML2
2,4 N·m 750 W R88M-G75030T-BS2 R88D-GN08H-ML2
3,18 N·m 1 kW R88M-G1K030T-BS2 R88D-GN15H-ML2
4,77 N·m 1,5 kW R88M-G1K530T-BS2 R88D-GN15H-ML2
7,15 N·m 1,5 kW R88M-G1K520T-S2 R88D-GN15H-ML2
7,15 N·m 1,5 kW R88M-G1K520T-BS2 R88D-GN15H-ML2
Capacité
servomoteur
Servomoteurs plats 3 000 tr/min (100 - 400 W)
Symbole Caractéristiques techniques Modèle de
A
Tension Codeur et conception Couple
230 V Codeur incrémental
(10 000 impulsions)
Arbre droit avec clavette, fileté
Codeur absolu/incrémental (17 bits)
Arbre droit avec clavette, fileté
Sans frein 0,32 N·m 100 W R88M-GP10030H-S2 R88D-GN01H-ML2
Avec frein 0,32 N·m 100 W R88M-GP10030H-BS2 R88D-GN01H-ML2
Sans frein 0,32 N·m 100 W R88M-GP10030T-S2 R88D-GN01H-ML2
Avec frein 0,32 N·m 100 W R88M-GP10030T-BS2 R88D-GN01H-ML2
nominal
0,64 N·m 200 W R88M-GP20030H-S2 R88D-GN02H-ML2
1,3 N·m 400 W R88M-GP40030H-S2 R88D-GN04H-ML2
0,64 N·m 200 W R88M-GP20030H-BS2 R88D-GN02H-ML2
1,3 N·m 400 W R88M-GP40030H-BS2 R88D-GN04H-ML2
0,64 N·m 200 W R88M-GP20030T-S2 R88D-GN02H-ML2
1,3 N·m 400 W R88M-GP40030T-S2 R88D-GN04H-ML2
0,64 N·m 200 W R88M-GP20030T-BS2 R88D-GN02H-ML2
1,3 N·m 400 W R88M-GP40030T-BS2 R88D-GN04H-ML2
Capacité
servomoteur
Câbles codeur
Symbole Caractéristiques techniques Modèle Présentation
C
Câble de codeur pour codeur absolu (50-750 W)
R88M-G(050/100/200/400/750)30T-@
R88M-GP(100/200/400)30T-@
Câble de codeur pour codeur incrémental (50-750 W)
R88M-G(050/100/200/400/750)30H-@
R88M-GP(100/200/400)30H-@
Câble de codeur pour codeur absolu (900-1 500 W)
R88M-G(1K0/1K5)30T-@
R88M-G(1K0/1K5)20T-@
R88M-G90010T-@
1,5 m R88A-CRGA001-5CR-E
3 m R88A-CRGA003CR-E
5 m R88A-CRGA005CR-E
10 m R88A-CRGA010CR-E
15 m R88A-CRGA015CR-E
20 m R88A-CRGA020CR-E
1,5 m R88A-CRGB001-5CR-E
3 m R88A-CRGB003CR-E
5 m R88A-CRGB005CR-E
10 m R88A-CRGB010CR-E
15 m R88A-CRGB015CR-E
20 m R88A-CRGB020CR-E
1,5 m R88A-CRGC001-5NR-E
3 m R88A-CRGC003NR-E
5 m R88A-CRGC005NR-E
10 m R88A-CRGC010NR-E
15 m R88A-CRGC015NR-E
20 m R88A-CRGC020NR-E
Servodrivers
compatibles
Servodrivers
compatibles
B
B
Servosystème série G 17
Page 16

Câble avec batterie pour codeur absolu
Symbole Caractéristiques techniques Modèle Présentation
C
Câble avec batterie pour
codeur absolu
Batterie de secours pour
codeur absolu
2 000 mA.h 3,6 V
Batterie non comprise 0,3 m R88A-CRGD0R3C
Une batterie R88ABAT01G comprise
- - R88A-BAT01G
0,3 m R88A-CRGD0R3C-BS
Conteneur de batterie
Remarque : Le câble avec batterie pour codeur absolu n'est qu'un câble d'extension et doit être utilisé avec un câble pour codeur absolu.
Câbles d'alimentation pour servodriver série G
Symbole Caractéristiques techniques Modèle Présentation
D
Pour servomoteurs de 50 à 750 W
R88M-G(050/100/200/400/750)30@
R88M-GP(100/200/400)30@
Pour les servomoteurs avec frein, un câble séparé
(R88A-CAGA@BR-E) est nécessaire
Pour servomoteurs de 900 à 1,5 kW sans frein
R88M-G(1K0/1K5)30T-S2
R88M-G(1K0/1K5)20T-S2
R88M-G90010T-S2
Pour servomoteurs de 900 à 1,5 kW avec frein
R88M-G(1K0/1K5)30T-BS2
R88M-G(1K0/1K5)20T-BS2
R88M-G90010T-BS2
1,5 m R88A-CAGA001-5SR-E
3 m R88A-CAGA003SR-E
5 m R88A-CAGA005SR-E
10 m R88A-CAGA010SR-E
15 m R88A-CAGA015SR-E
20 m R88A-CAGA020SR-E
1,5 m R88A-CAGB001-5SR-E
3 m R88A-CAGB003SR-E
5 m R88A-CAGB005SR-E
10 m R88A-CAGB010SR-E
15 m R88A-CAGB015SR-E
20 m R88A-CAGB020SR-E
1,5 m R88A-CAGB001-5BR-E
3 m R88A-CAGB003BR-E
5 m R88A-CAGB005BR-E
10 m R88A-CAGB010BR-E
15 m R88A-CAGB015BR-E
20 m R88A-CAGB020BR-E
Câble de frein (pour servomoteurs 50-750 W)
Symbole Caractéristiques techniques Modèle Présentation
E
Câble de frein uniquement.
Pour servomoteurs de 50 à 750 W avec frein
R88M-G(050/100/200/400/750)30@-BS2,
R88M-GP(100/200/400)30@-BS2
1,5 m R88A-CAGA001-5BR-E
3 m R88A-CAGA003BR-E
5 m R88A-CAGA005BR-E
10 m R88A-CAGA010BR-E
15 m R88A-CAGA015BR-E
20 m R88A-CAGA020BR-E
Connecteurs pour câbles d'alimentation, de codeur et de frein
Caractéristiques techniques Servomoteur applicable Modèle
Connecteurs pour
câbles d'alimentation
Connecteurs pour
câbles codeur
Connecteur pour câble de
frein
Côté moteur R88M-G(050/100/200/400/750)30@, R88M-GP(100/200/400)30@ R88A-CNG01A
Côté moteur R88M-G(1K0/1K5)30@-S2, R88M-G(1K0/1K5)20@-S2, R88M-G90010@-S2 (sans frein) MS3108E20-4S
Côté moteur R88M-G(1K0/1K5)30@-BS2, R88M-G(1K0/1K5)20@-BS2, R88M-G90010@-BS2 (avec frein) MS3108E20-18S
Côté driver (CN2) - R88A-CNW01R
Côté moteur R88M-G(050/100/200/400/750)30T-@, R88M-GP(100/200/400)30T-@ (codeur absolu) R88A-CNG01R
Côté moteur R88M-G(050/100/200/400/750)30H-@, R88M-GP(100/200/400)30H-@ (codeur incrémental) R88A-CNG02R
Côté moteur R88M-G(1K0/1K5)30T-@, R88M-G(1K0/1K5)20T-@, R88M-G90010T-@ MS3108E20-29S
Côté moteur R88M-G(050/100/200/400/750)30@-BS2, R88M-GP(100/200/400)30@-BS2 R88A-CNG01B
TOUTES LES DIMENSIONS SONT INDIQUÉES EN MILLIMÈTRES.
Pour convertir les millimètres en pouces, multipliez par 0,03937. Pour convertir les grammes en onces,
multipliez par 0,03527.
Les produits étant sans cesse améliorés, ces caractéristiques peuvent être modifiées sans préavis.
18 Servomoteurs c.a.
Page 17

OMRON EUROPE B.V.
Wegalaan 67-69, NL-2132 JD, Hoofddorp, Pays-Bas. Tél. : +31 (0) 23 568 13 00 Fax : +31 (0) 23 568 13 88 www.industrial.omron.eu
FRANCE
Omron Electronics S.A.S.
14 rue de Lisbonne
93561 Rosny-sous-Bois cedex
Tél. : +33 (0) 1 56 63 70 00
Fax : +33 (0) 1 48 55 90 86
www.industrial.omron.fr
Agences régionales
BELGIQUE
Omron Electronics N.V./S.A.
Stationsstraat 24, B-1702 Groot Bijgaarden
Tél. : +32 (0) 2 466 24 80
Fax : +32 (0) 2 466 06 87
www.industrial.omron.be
SUISSE
Omron Electronics AG
Sennweidstrasse 44
CH-6312 Steinhausen
Tél. : +41 (0) 41 748 13 13
Fax : +41 (0) 41 748 13 45
www.industrial.omron.ch
Romanel Tél. : +41 (0) 21 643 75 75
Afrique du Sud
Tél. : +27 (0)11 579 2600
www.industrial.omron.co.za
Allemagne
Tél. : +49 (0) 2173 680 00
www.industrial.omron.de
Autriche
Tél. : +43 (0) 2236 377 800
www.industrial.omron.at
Danemark
Tél. : +45 43 44 00 11
www.industrial.omron.dk
Espagne
Tél. : +34 913 777 900
www.industrial.omron.es
Finlande
Tél. : +358 (0) 207 464 200
www.industrial.omron.fi
Hongrie
Tél. : +36 1 399 30 50
www.industrial.omron.hu
Italie
Tél. : +39 02 326 81
www.industrial.omron.it
Norvège
Tél. : +47 (0) 22 65 75 00
www.industrial.omron.no
Pays-Bas
Tél. : +31 (0) 23 568 11 00
www.industrial.omron.nl
Pologne
Tél. : +48 (0) 22 645 78 60
www.industrial.omron.pl
Portugal
Tél. : +351 21 942 94 00
www.industrial.omron.pt
République Tchèque
Tél. : +420 234 602 602
www.industrial.omron.cz
Royaume-Uni
Tél. : +44 (0) 870 752 0861
www.industrial.omron.co.uk
Russie
Tél. : +7 495 648 94 50
www.industrial.omron.ru
Suède
Tél. : +46 (0) 8 632 35 00
www.industrial.omron.se
Turquie
Tél. : +90 216 474 00 40
www.industrial.omron.com.tr
Autres représentants Omron
www.industrial.omron.eu
KPP_G-Series_FR
Systèmes d’automatisation
• Automates programmables industriels (API) • Interfaces homme-machine (IHM)
• E/S déportées • PC industriels • Logiciels
Variation de fréquence et contrôle d’axes
• Systèmes de commande d’axes • Servomoteurs • Variateurs
Composants de contrôle
• Régulateurs de température • Alimentations • Minuteries • Compteurs
• Blocs-relais programmables • Indicateurs numériques • Relais électromécaniques
• Produits de surveillance • Relais statiques • Fins de course • Interrupteurs
• Contacteurs et disjoncteurs moteur
Détection & sécurité
• Capteurs photoélectriques • Capteurs inductifs • Capteurs capacitifs et de pression
• Connecteurs de câble • Capteurs de déplacement et de mesure de largeur
• Systèmes de vision • Réseaux de sécurité • Capteurs de sécurité
• Relais de sécurité/relais • Interrupteurs pour portes de sécurité
316 853 332 R.C.S. BOBIGNY Bien que nous nous efforcions d’atteindre la perfection, Omron Europe BV et/ou ses filiales
et partenaires n’offrent aucune garantie et n’assument aucune responsabilité pour ce qui est de l’exactitude ou de l’exhaustivité
des informations fournies dans ce document. Nous nous réservons le droit de modifier son contenu à tout moment et sans préavis.
 Loading...
Loading...