

Page 1
AC Servo System 1S-series
Startup Guide
for Multi-axis Setup and Tuning
R88M-1L[]/-1M[] (AC Servomotors)
R88D-1SN[]-ECT (AC Servo Drives)
SYSMAC-SE20[][] (Automation Software)
I827-E1-01
Page 2
NOTE
All rights reserved. No part of this publication may be reprodu c ed, st or ed in a retrieval system,
or transmitted, in any for m , or by any means, mechanical, photocopying, recording, or
otherwise, without the prio r w r it t en per m iss ion of OMRON.
No patent liability is assume d with respect to the use of the information contained herein.
Moreover, because OMRON is const antly striving to improve its h igh-quality products, the
information contained in t his manual is subject to change without notice. Every precauti on has
been taken in the preparation o f this manual. Nevertheless, O M RON assumes no
responsibility for errors or omissions. Neither is any l iability assumed for damages r esulting
from the use of the informat ion contained in this publication.
2
Page 3
Introduction
The Servo System 1S-Series Star t up Guide for Multi-axis Setup and T un in g (hereinafter, may
be referred to as "this Guide") describes the procedures for installation and setup of 1S Servo
Drives, where an NJ/NX-series CPU Unit is used in combination with 1S-series AC
Servomotors/Servo Drives and NX-series Safety Unit, by using the Sy smac Studio. A simple
installation model is used for t he discussion. You can perform the procedur es that are
presented in this Guide to quickly gain a basic understanding o f a 1S-series AC
Servomotors/Servo Drives.
This Guide does not contain sa fety infor mation and ot her detai ls that are requ ir ed for actu al us e.
Thoroughly read and u nderstand t he manua ls for all of the device s that are u sed in th is Guide t o
ensure that the system is used safely. Review the entire contents of these materials, inc lud ing
all safety precautions, precautions for safe use, and pr ecautions for correct use.
Intended Audience
This Guide is intended for t he following personnel.
• Personnel in charge of introducing FA systems
• Personnel in charge of de signing FA systems
The personnel must also hav e t he following knowledge.
• Knowledge of electrical sy s t em s ( an el ectrical engineer or the equ iv alent )
• Knowledge of NJ/NX-series CP U Units
• Knowledge of Servomotors/Drives
• Knowledge of operation pr ocedure of Sysmac Studio
Applicable Products
This Guide covers the foll ow ing products.
• CPU Units of NJ/NX-series Machine Automation Controllers
• Automation Software Sy smac Studio
• 1S-series Servomotors/Servo Drives
Special Information
The icons that are used in this G uid e ar e described below.
Precautions for Safe Use
Precautions on what to do and w hat not to do to ensure safe usage o f the pr oduct.
Precautions for Correct Use
Precautions on what to do and w hat not to do to ensure proper operat i on and
performance.
Additional Inf or mation
Additional information to read as required.
This information is provid ed to increase understanding or m ake operation easier.
3
Page 4

Terms and Conditions A gree ment
Warranties
(a) Exclusive Warranty . Omro n’s exclusive warranty is that t he Pr oducts will be free from
defects in materials and w or km anship for a period of twelve months from the date of sale by
Omron (or such other period expressed in writing by Omron). Omron discla ims all other
warranties, express or implied.
(b) Limitations. OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR
IMPLIED, ABOUT NON-INFRINGEMENT, M ERCHANTA BILITY OR FITNESS FOR A
PARTICULAR PURPOSE OF THE PRODUCTS. BUYER ACKNOWLEDGES THAT IT ALONE
HAS DETERMINED THAT THE PRODUCTS WILL SUITABLY ME ET T HE REQ UI R EME N TS
OF THEIR INTENDED US E.
Omron further disclaims a l l w ar r ant ies and responsibility of any t ype for claims or expenses
based on infringement by the Products or otherwise of any intellectual property right. (c) Buyer
Remedy.
Omron’s sole obligation hereunder shall be, at Omr on’s election, to (i) replace ( in the form
originally shipped with Buyer r es ponsi ble for labor charges for removal or r eplacement thereof)
the non-complying Product , ( ii) repair t he non-complying Product, or ( iii) repay or credit Buyer
an amount equal to the pur chase price of the non-complying Pr oduct; provided that in no event
shall Omron be respons ibl e for w ar r ant y, repair, indemnity or any other claims or expenses
regarding the Products unless Omron’s analysis confir ms that the Products were properly
handled, stored, installed and maintained and not subj ec t t o cont amination, abuse, misuse or
inappropriate modification. Return of any Products by Buyer must be approved in w r iting by
Omron before shipment. O mron Companies shall not be liable for the suitability or unsuit abi lity
or the results from the use of Products in combination w it h any electrical or electronic
components, circuits, system asse mblies or any other materials or substances or environ ments .
Any advice, recommend at ions or information given orally or in writing, are not to be construed
as an amendment or addition to t he above warranty.
See http://www.omron.com/global/
information.
Limitation on Liability; Etc
OMRON COMPANIES SHA L L NOT BE LIABLE FOR SPECI AL, INDIRECT, INCIDENTAL, OR
CONSEQUENTIAL DAMA GES, LOSS OF PROFITS OR PRODUCTION OR COMMERCIAL
LOSS IN ANY WAY CONNECTED WITH THE PRODUCTS, WHETHER SUCH CLAIM IS
BASED IN CONTRACT, WARRANTY, NEGLIGENCE OR STRICT LIABILITY.
Further, in no event shall liabil ity of Omron Companies exceed t he i ndividual price of the
Product on which liability is asserted.
Suitability of Use
Omron Companies shall n ot be r esponsible for conformity w it h any standards, codes or
regulations which apply t o the combination of the Product in the Buyer’s application or us e of
the Product. At Buyer’s request, Omron will provide applicable third party certif ication
4
or contact your Omro n r epr esentative for published
Page 5

documents identifying rati ngs and limitations of use which apply t o the Product . This inform ation
by itself is not sufficient for a complete determination of the suitability of the P r oduc t in
combination with the end pr oduct , machine, system, or ot her appl ication or use. Buyer shall be
solely responsible for dete r m ini ng appropriateness of the part ic ular Product with respect to
Buyer’s application, pr oduct or system. Buyer shall ta ke application responsibility in all cases.
NEVER USE THE PRODUCT F OR AN APPLICATION INVOLVING S ERIOUS RISK TO LIFE
OR PROPERTY WIT HO U T ENSU RI NG TH A T THE SY ST EM AS A WHOLE H AS BE E N
DESIGNED TO ADDRES S THE RISKS, A ND THAT THE O MRON PROD UCT(S) IS
PROPERLY RATED AND INSTALLED FOR THE INTENDED USE WITHIN THE OVERALL
EQUIPMENT OR SY ST E M.
Programmable Products
Omron Companies shall n ot be r esponsible for the user’s programming of a programmable
Product, or any consequence thereof.
Performance Data
Data presented in Omron Company websites, catalogs and other materials is prov ided a s a
guide for the user in deter m in ing suitability and does not constitute a warranty. It may represent
the result of Omron’s test c onditions, and the user must cor r el at e it t o act ual application
requirements. Actual performance is subject to the O mron’s Warranty and Limitatio ns of
Liability
Change in Specificati on s
Product specifications and accessories may be changed at any time based on improvements
and other reasons. It is o ur practice to change par t numbers when published ratings or features
are changed, or when significant construction changes are made. However, some
specifications of the Product may be changed without any notice. When in doubt, speci al p ar t
numbers may be assigned to fix or establish key specificati ons f or your application. Please
consult with your Omron’s representative at any time t o c onf irm actual specifications of
purchased Product.
Errors and Omissions
Information presented by Omron Companies has been checked and is believed to be accurate;
however, no responsibility is assumed for clerical, typographical or proofreading err or s or
omissions.
5
Page 6
Precautions
• When building a system, check the specifications for all devices and equipment that will make
up the system and make sur e t hat the OMRON products are used w el l w ithin their rated
specifications and performances. Safety measures, such as safety circuits, must be
implemented in order to m inim ize the risks in the event of a malfunction.
• Thoroughly read and understand the manuals for al l devices and equipment that w il l make up
the system to ensure that the system is used safely. Review the entire contents of these
manuals, including all saf ety precautions, prec aution s for safe use, and precau tions for corr ect
use.
• Confirm all regulations, standards, and restrictions that the system must ad here to.
• Check the user program f or pr oper execution before you use it for actual operation.
Trademarks
• Sysmac and SYSMAC are trademarks or reg ist er ed trademarks of OMRON Corporation in
Japan and other countries for O M RON factory automation product s.
• Windows is either registered trademarks or tradema rks o f M i c ros oft Corporation in the USA
and other countries.
• EtherCAT
GmbH, Germany.
• Microsoft product screen shot(s) reprinted with permission from Microsoft C orporation.
• Other company names and product names in this Guide are the trademarks or r egister ed
trademarks of their respe ctive companies.
Software Licenses and Copyrights
®
is registered tr ade mark and pat ented t echno logy, licensed by Beckhof f Automation
The NJ-series CPU Units and Sysmac Studio incorporate certain third party software. The
license and copyright infor mation associated with this softw ar e is available at
http://www.fa.omron.co.jp/nj_info_e/.
6
Page 7
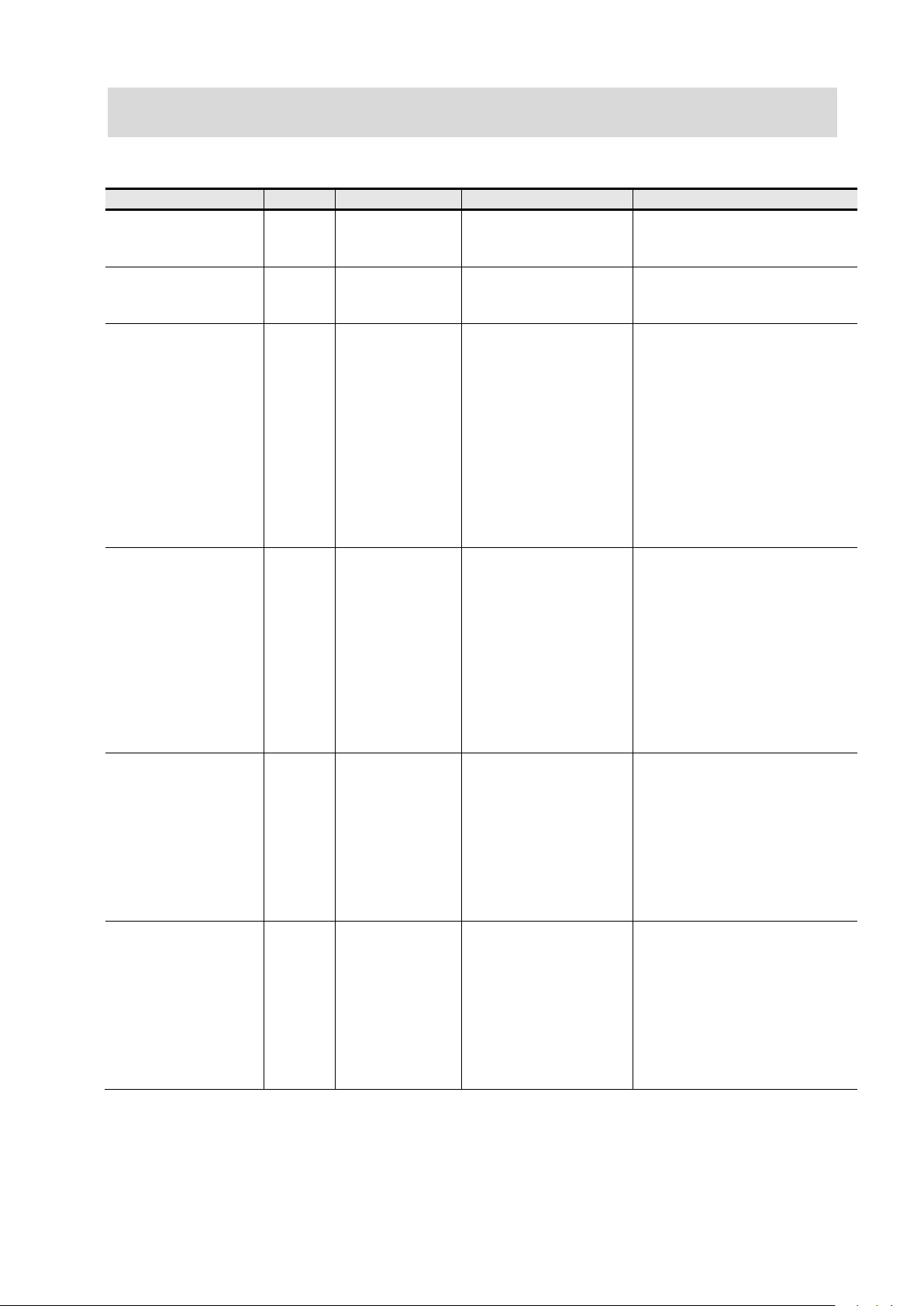
Related Manuals
The following manuals are related. Use these manuals for reference.
Manual name Cat. No. Model Application Description
Sysmac Studio Version 1
Operation Manual
Sysmac Studio Drive
Functions Operation
Manual
NJ-series CPU Unit
Hardware User´s Manual
NJ/NX-series CPU Unit
Software User’s Manual
NJ/NX-series CPU Unit
Motion Control User's
Manual
NJ/NX-series Instructions
Reference Manual
W504 SYSMAC-SE2□□□ Learning about the operating
procedures and functions of
the Sysmac Studio.
I589-E1 SYSMAC-SE2□□□ Learning about the operating
procedures and functions of
the Sysmac Studio for Drives
W500 NJ501-□□□□
NJ301-□□□□
W501 NJ501-□□□□
NJ301-□□□□
W507 NJ501-□□□□
NJ301-□□□□
NJ101-□□□□
W502 NJ501-□□□□
NJ301-□□□□
Learning the basic
specifications of the
NJ-series CPU Units,
including introductory
information, designing,
installation, and
maintenance.
Mainly hardware information
is provided.
Learning how to program and
set up an NJ/NX-series CPU
Unit.
Mainly software information is
provided.
Learning about motion
control settings and
programming concepts.
Learning detailed
specifications on the basic
instructions of an
NJ/NX-series CPU Unit.
Describes the operating procedures of
the Sysmac Studio.
Describes the operating procedures of
the Sysmac Studio to setup Drives
Provides an introduction to the entire
NJ-series system along with the
following information on the CPU Unit.
• Features and system configuration
• Overview
• Part names and functions
• General specifications
• Installation and wiring
• Maintenance and inspection
Use this manual together with the
NJ/NX-series CPU Unit Software
User's Manual (Cat. No. W501).
Provides the following information on a
Controller built with an NJ/NX-series
CPU Unit.
• CPU Unit operation
• CPU Unit features
• Initial settings
• Language specifications and
programming based on IEC 61131-3
Use this manual together with the
NJ-series CPU Unit Hardware User's
Manual (Cat. No. W500).
Describes the settings and operation of
the CPU Unit and programming
concepts for motion control.
When programming, use this manual
together with the NJ-series CPU Unit
Hardware User's Manual (Cat . No .
W500) and NJ/NX-series CPU Unit
Software User's Manual (Cat. No.
W501).
Describes the instructions in the
instruction set (IEC 61131-3
specifications).
When programming, use this manual
together with the NJ-series CPU Unit
Hardware User's Manual (Cat . No .
W500) and NJ/NX-series CPU Unit
Software User's Manual (Cat. No.
W501).
7
Page 8
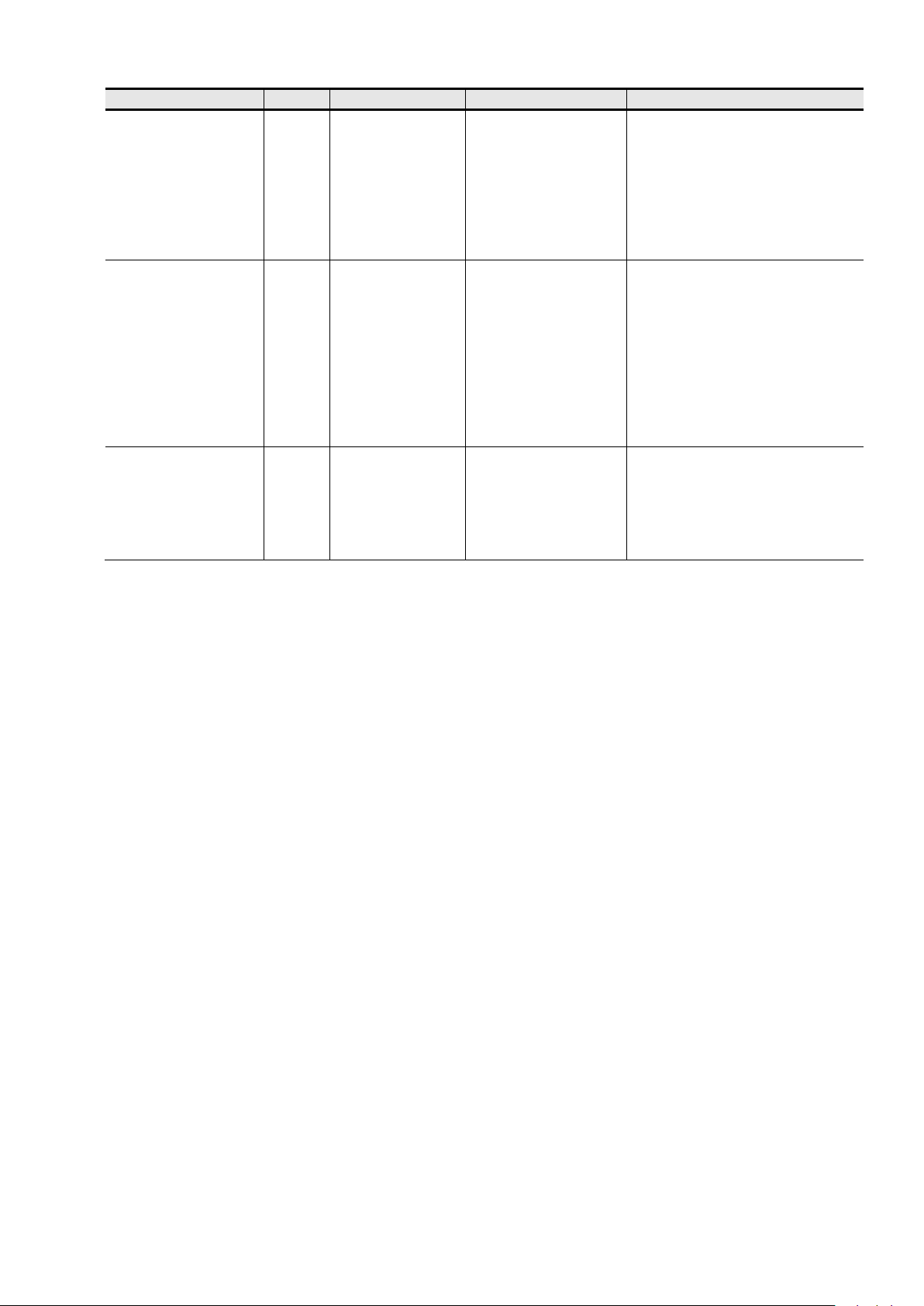
Manual name
Cat. No.
Model
Application
Description
NJ/NX-series Motion
Control Instructions
Reference Manual
NJ/NX-series
Troubleshooting Manual
W508 NJ501-□□□□
NJ301-□□□□
W503 NJ501-□□□□
NJ301-□□□□
Learning about the
specifications of the motion
control instructions that are
provided by OMRON.
Learning about the errors
that may be detected in an
NJ/NX-series Controller.
Describes the motion control instructions.
When programming, use this manual
together with the NJ-series CPU Unit
Hardware User's Manual (Cat . No .
W500), NJ/NX-series CPU Unit Software
User's Manual (Cat. No. W501), and
NJ/NX-series CPU Unit Motion Control
User's Manual (Cat. No. W507).
Describes concepts on managing errors
that may be detected in an NJ/NX-series
Controller and information on individual
errors.
Use this manual together with the
NJ-series CPU Unit Hardware User's
Manual (Cat. No. W500) and
NJ/NX-series CPU Unit Software User's
Manual (Cat. No. W501).
1S-series AC
Servomotors/Servo Drives
with Built-in EtherCAT
Communications User's
Manual
I586
R88D-1S□-ECT
R88M-1□
Learning detailed
specifications of a
1S-series Servo Drive.
Describes how to install and wire the
Servo Drive, set parameters needed to
operate the Servo Drive, and remedies to
be taken and inspection methods to be
used in case that problems occur.
8
Page 9
Revision History
Cat. No.
A manual revision code appears as a suffix to the catalog number on the front and back covers
of the manual.
Revision code Date Revised content
01 April 2017 Original production
I827-E1-01
Revision code
9
Page 10

CONTENTS
Introduction ······························································································ 3
Intended Audience ..................................................................................................... 3
Applicable Products ................................................................................................... 3
Special Information .................................................................................................... 3
T erms and Conditions Agreement ······························································· 4
Precautions ······························································································ 6
Trademarks ................................................................................................................ 6
Software Licenses and Copyrights ............................................................................ 6
Related Manuals ······················································································· 7
Revision History ······················································································· 9
1. Servo system configuration and peripheral pro ducts ···························· 11
1.1. Outline ............................................................................................................. 11
1.2. Servo System constructed in this guide .......................................................... 12
2. Before You Begin ·············································································· 14
2.1. Installin g the Sysmac Studio ........................................................................... 14
2.2. Assembl ing the Hardware ............................................................................... 15
2.3. Wiring the Device s .......................................................................................... 16
3. Performing setup ·············································································· 20
3.1. Two axis servo system operation .................................................................... 20
3.2. System s et up pr ocedures ............................................................................... 22
3.3. Creating pr oject with Auto connection ............................................................ 22
3.4 Creating the EtherCAT Network Configurati on ............................................... 24
3.5 Creating motion axes ...................................................................................... 26
3.6 Program making and transfer to the CPU Unit ............................................... 32
3.7 Drives and motors para m et er s set up .............................................................. 34
3.8 Easy Tuning (Multiple Driv es) ......................................................................... 38
ANNEX ··································································································· 44
A-1 Settings when control input signals are not wired ............................................ 44
A-2 Program making with st r uct ur ed text ................................................................ 51
10
Page 11
1. Servo system configuration and peripheral products
1.1. Outline
The 1S-series AC Servo Drives with Built-in EtherCAT communications support 100-Mbps EtherCAT .
When you use the 1S-series Servo Drive with a Machine Automation Controller NJ/NX-series CPU Unit,
you can construct a high-speed and sophisticated positioning control system.
Also, you need only one communications cable to connect the Servo Drive and the Controller. Therefore,
you can realize a position control system easily with reduced wiring effort.
With auto tuning, adaptive filter, notch filter, and damping control, you can set up a system that provides
stable operation by suppressing vibration in low-rigidity machines.
For machine composed with multiple 1S-series AC Servo Drives, Sysmac Studio provides a set of
functions to set-up and tune parameters with less effort.
Additional Inf or mation
For additional information about 1S servo drive, please refer to 1S-series AC Servomotors and Servo
Drives User’s Manual (with Built-in EtherCAT Communications) (Cat. No. I586)
11
Page 12
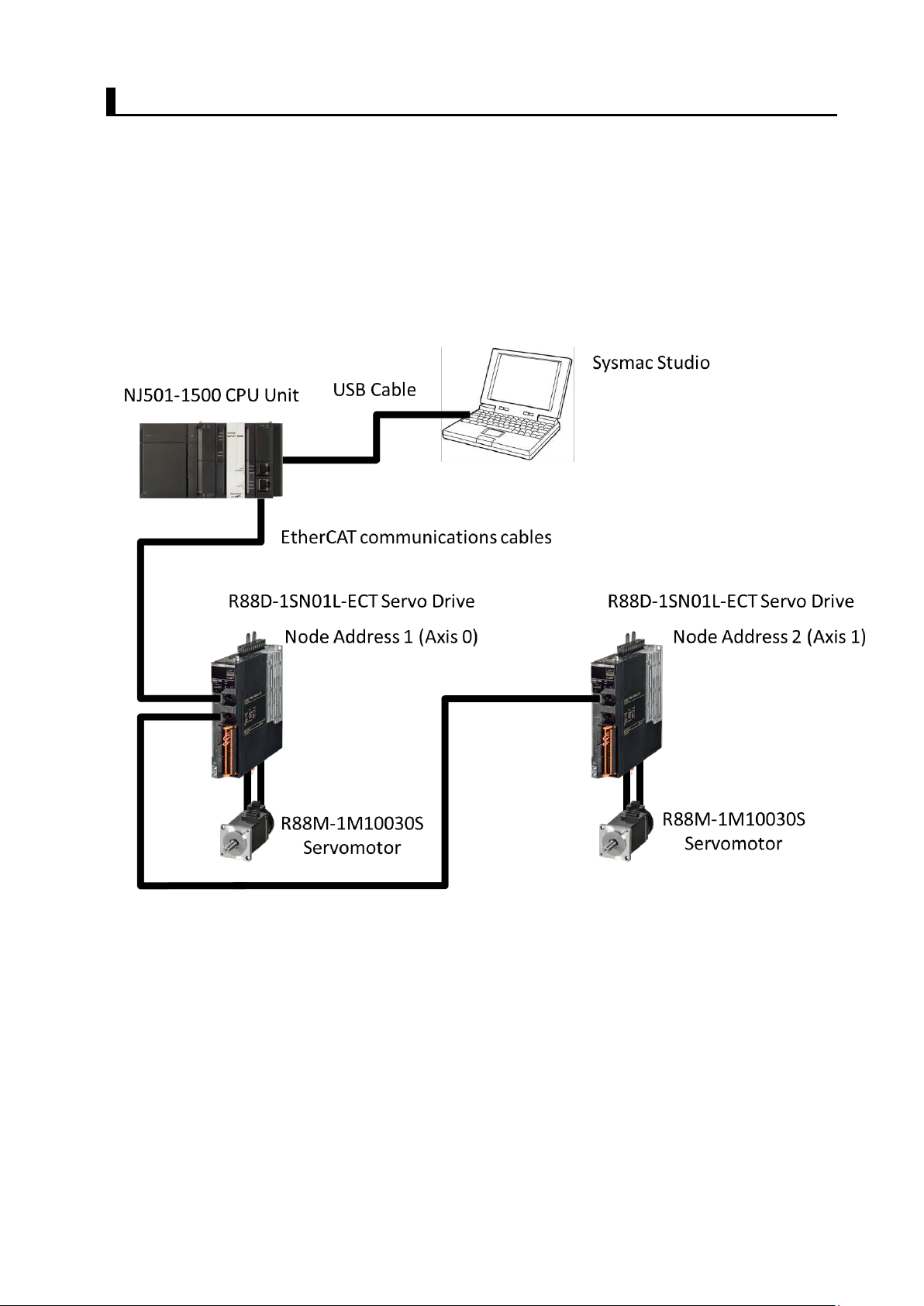
1.2. Servo System constructed in this guide
This 1S-series Startup Guide for multi-axis setup and tuning (hereafter referred to as “this Guide”) contains
instructions to set-up and tune an X-Y stage system composed of two 1S-series AC Servo Driv es.
The following figure shows the system configuration and devices that are used in this Guide.
The system configuration is shown in the following figure.
12
Page 13
in EtherCAT
Sysmac Studio Standard Edition
• Configuration device s
The models of the devices that are described in this Guide are given in the following table. When selecting
devices for an actual application, refer to the device manuals.
Device name Model Manual name
NJ-series CPU Unit NJ501-1500 NJ-series CPU Unit Hardware
NJ-series Power Supply Unit NJ-PA3001
EtherCAT communications cables XS5W-T421-CMD-K
AC Servo Drives R88D-1SN01L-ECT 1S-series AC Servomotors and
AC Servo Motors R88M-1M10030S
Power cables R88A-CA1A003S
Encoder Cables R88A-CR1A003C
User’s Manual (Cat. No. W500)
Servo Drives User’s Man ua l ( with
BuiltCommunications) (Cat. No. I586)
• Automation software
Product Number of license Model
None (DVD only) SYSMAC-SE200D
Versi on 1.18 or higher
1 license SYSMAC-SE201L
13
Page 14

2. Before You Begin
2.1. Installing the Sysmac Studio
The Sysmac Studio is the Support Software that you use for an NJ-series Controller. On it, you can set-up
the Controller configurations, parameters, and programs, and you can debug and simulate operation.
Install the Sysmac Studio on your computer.
Refer to the NJ-series Startup Guide for CPU Units (Cat. No. W513) for the procedure to install the
Sysmac Studio.
14
Page 15
2.2. Assembling the Hardware
This section describes how to assemble the hardware used in the system.
This section gives an overview of the assembly procedures. Refer to the manuals for the devices that are
used in the system for detailed assembly procedures and safety precautions.
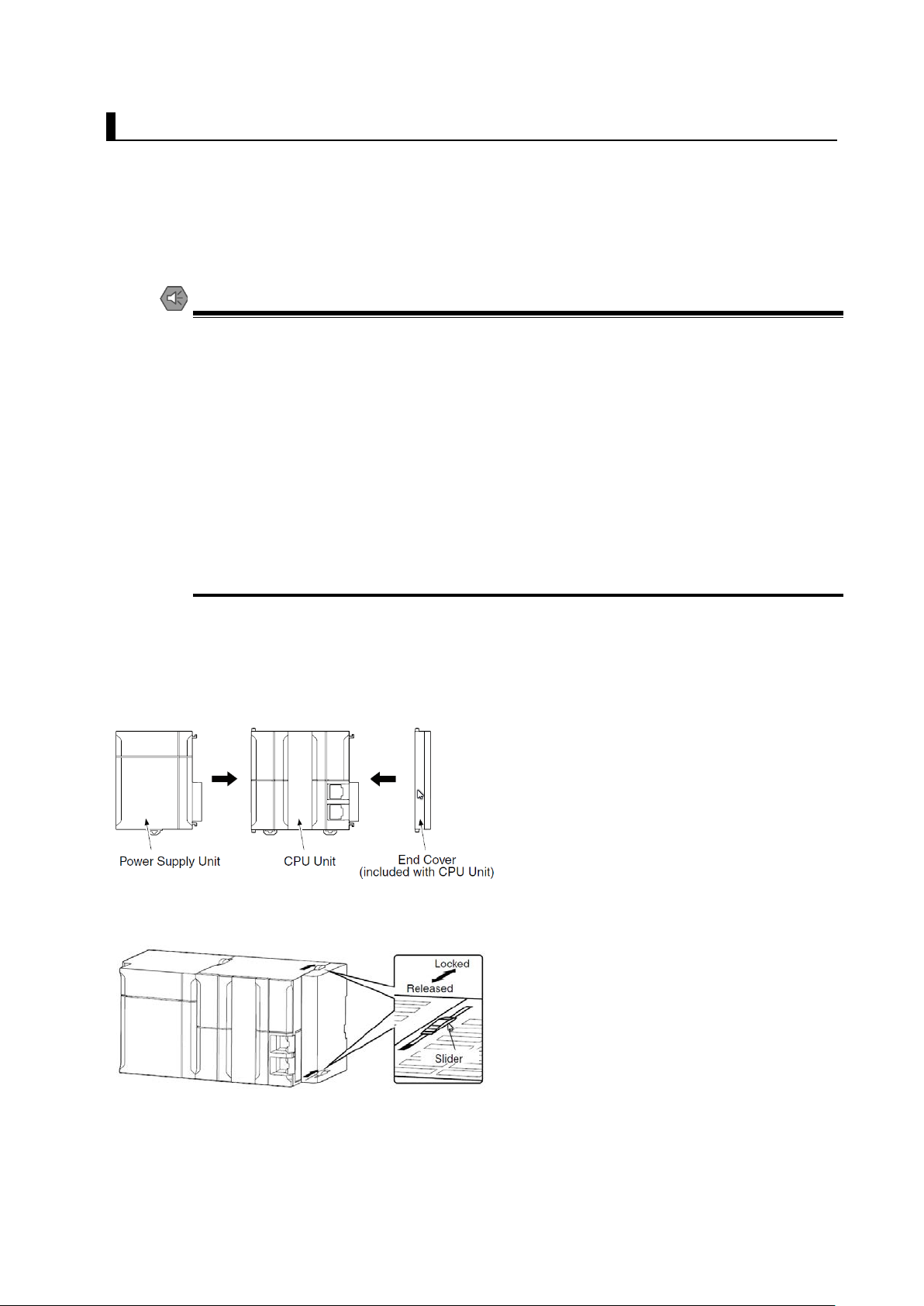
Mounting the Units
Connect the Power Supply Unit, CPU Unit, and End Cover.
Precautions for Safe Use
Always turn OFF the pow er s upply to the Controller and to the Servo Drives before you
attempt any of the followin g.
• Mounting or removing the CPU Unit and Other Units
• Assembling Racks
• Setting DIP switches or rotar y switches.
• Connecting cables or wiring the system
• Connecting or disconnecting the connectors
The Power Supply Unit cont inues to supply power to the Controller for up to several
seconds after the power s upply is turned OFF. The PWR indicator remains lit as long as
power is supplied. Ma ke sur e t hat the PWR indicator is not lit before you perform any of
the above operations.
After joining the connectors between the Units, use the sliders at the top and bottom of each Unit to lock
the Units together. Lock the sliders firmly into place.
15
Page 16
2.3. Wiring the Devices
This section describes how to wire the hardware devices.
This section gives an ov er v iew of the w irin g pro ced ur es. Re fer to th e manua ls for the dev ices t hat are
used in the system for detailed w iring procedures and safety precautions.
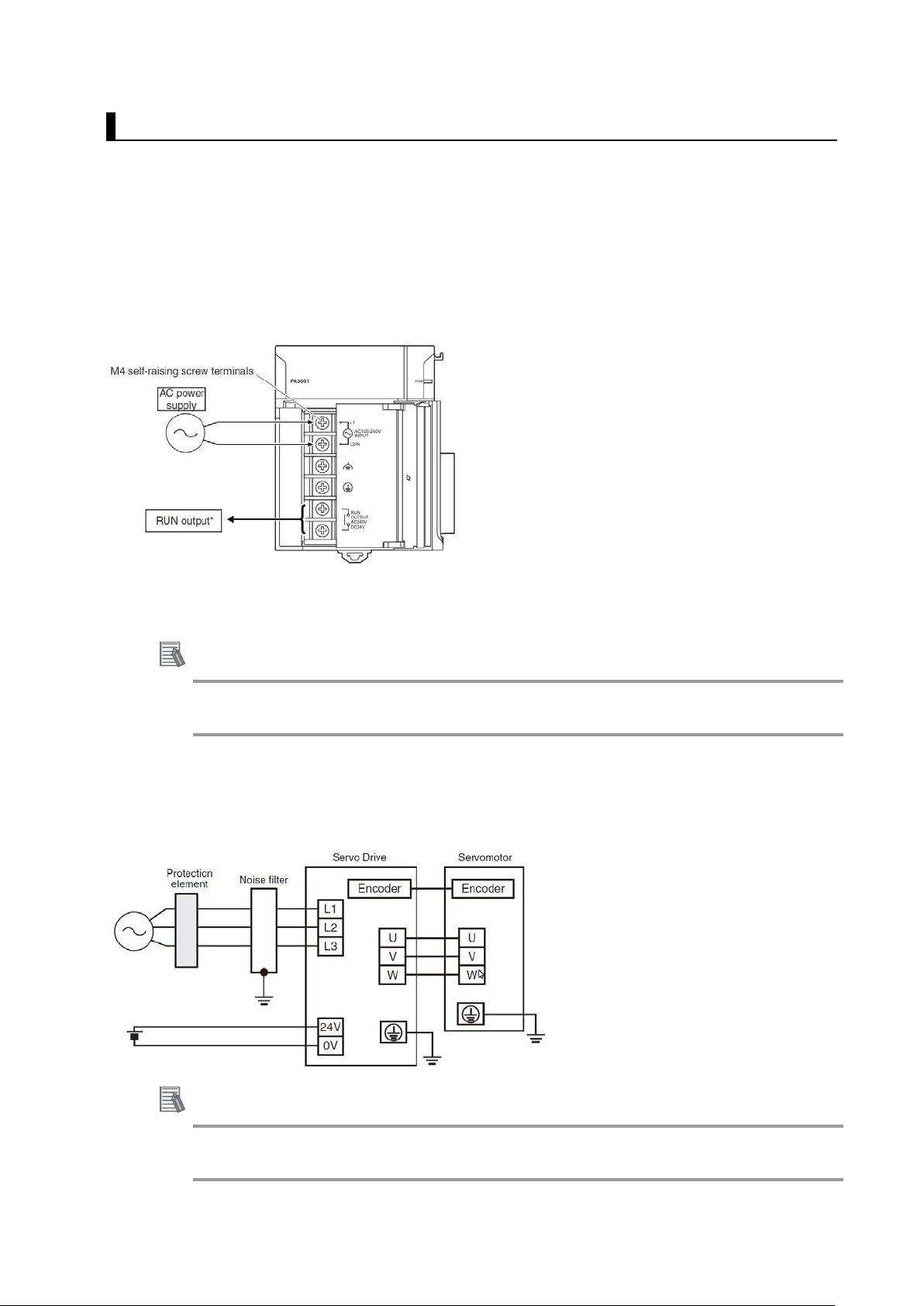
Wiring the Rack Power Supply Unit
Wire the Power Supply Unit to the power supply.
*The RUN output is ON when the CPU Unit is in RUN mode. It is OFF when the CPU
Unit is in PROGRAM mode or when a major fault level Controller error occurs.
Additional Inf or mation
This Guide uses an NJ-PA3001 AC Power Supply Unit. An NJ-PD3001 DC Power Supply Unit can also
be used.
Wiring the Servo Drive Power Supply
Wire the Servo Drives to the power supply as shown in the following figure.
16
Additional Inf or mation
For further details about wiring method, please r efer to 1S-series AC Servomotors and Servo Drives
User’s Manual (with Built-in EtherCAT Communications) (Cat. No. I586)
Page 17

Laying EtherCAT Communi cati ons Cables
Connect the EtherCAT slave communications cables between the built-in EtherCAT port on the CPU Unit
and the EtherCAT slaves as shown in the following figure.
Connect the communications cable from the built-in EtherCA T port to the input port on the first slave, and
then connect the communications cable to the next slave to the output port on the first slave.
Do not connect anything to the output port of the slave at the end of the network.
Setting the Node Addresses of the Servo Drives
Set the node addresses of the Servo Drives as shown below.
17
Page 18

Wiring the Servo Drives and the Servomotors
Wire the Servo Drives and the Servomotors as shown in the fol lowing figure.
18
Page 19

Wiring the Control Input Signals for the Servo Drives
When using the default Servo parameters, please wire the
Wire the control input signals for the Servo Drive using the R88A-CN101C Control I/ O connector
(CN1).
For details on wiring, refer t o the AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT
Communications User's Manual (Cat. No. I586).
immediate stop input (ESTOP), negative drive prohibit input
(NOT), and the positive drive prohibit input (POT).
*Control I/O Connector (CN1):
Used for command input signals, I/O signals, and as the safety device connector. The short-circuit wire is installed on
the safety signals before shipment.
Additional Inf or mation
• If you use the default Servo parameters, you must wire the immediate stop input, negative drive
prohibit input, and the positive drive prohibit input.
If these inputs are not wired, the CPU Unit will remain in the drive prohibit signal and emergency stop
signal detected state, and a minor fault level Controller error will occur. The minor fault level Controller
errors that will occur are an Immediate Stop Input Error and a Drive Prohibition Input Error. (The event
codes are 68220000 and 64E30000.)
• If the above signals are temporarily not wired while commissioning the system, you can temporarily
change the Servo parameters to prevent these errors from occurring in the CPU Unit.
Refer to A-1 Settings When Control Input Signals Are Not Wired
must change in this case.
for details on the settings that you
19
Page 20

3. Performing setup
3.1. Two axis servo system operation
This section describes the operation of two-axis Servo system that is set up in this Guide.
In this system, axis 0 and axis 1 are set up for an XY stage.
The mechanical configuration of axis 0 and axis 1 are as shown in the following table.
Item Axis 0 / Axis 1 mechanical configuration
Motor rated speed 3000 r/min
Ball screw pitch 10 mm
Encoder resolution 23 bits/rotation (8,338,608)
20
Page 21

The XY stage will repeatedly travel between two points using linear interpolation with a 2 seconds dwell
time after each movement.
Interpolation velocity: 250 mm/s
Acceleration rate: 8000 mm/s²
Deceleration rate: 8000 mm/s²
50 mm
Dwell time: 2 seconds
0 mm
The speed waveforms for axis 0 and axis 1 are shown below
Dwell time: 2 seconds
50 mm
21
Page 22

3.2. System setup procedures
1 Create a project with Auto connection
▼
2 Create the EtherCAT Network configuration
▼
3 Create motion axes
▼
4 Program making and transfer to the CPU U nit
▼
5 Drives and motors setup
▼
6 Multiple drive Easy tuning for gain adjustment
3.3. Creating project with Auto connection
Start the Sysmac Studio:
Select All Programs − OMRON − Sysmac Studio − Sysmac Studio from the Windows St art Menu.
Create a project in t he Sysmac Studio
1.
Click the Button in the Project window
2.
In the Connect to Device Dialog Box,
Click the button
22
Page 23

Sysmac Studio will browse and connect to the controller
This concludes the proce dure to create a project file w ith auto connection
Additional Inf or mation
For creating a project offl ine or specif ic proc edures please refer to the Sysmac Studio Version 1
Operation Manual (Cat. No. W504).
23
Page 24

Compare and Merge with Actual Network
3.4 Creating the EtherCAT Network Configuration
Two R88D-1SN01L-ECT Ser vo Drives are registered in the Et herCAT network configuration
1.
Double-click EtherCAT under Configurations and Setups in the Multiview Explorer.
The EtherCAT page is displayed in the Edit Pane.
2.
Right click on the Master and select
Configuration
24
Page 25

3. The Compare and Merge w it h Actual Network Configuration wind ow is displayed
e actual network
Click on Apply actual network configuration to apply th
configuration.
Click Apply to confirm:
A pop-up message confirmed the net w ork configuration.
Click the Close Button
Confirm the detected configuration and close the win dow
25
Page 26

Disconnect from the controller
3.5 Creating motion axes
This section describes how to add axes used to control Serv o Drives. A xes will be created bas ed on
detected Servo Drives.
1.
Right click on the Master and select Assign Drives to Axes
26
Confirm axes allocation by clicking the Yes Button
Confirm the list of Axes added and Click the Ok Button
Page 27

Right-click Axis Settings in the Multiview Explorer and select Axis setting table.
Axis number has been s et t o 0 and 1, A xis type to Servo axis and Output device 1 to
Node: 1 and Node: 2 on CH1 (Chan nel 1).
Project transfer to synchronize Sysmac Studio project and the CPU unit
2.
Click the Connect Button on the Toolbar
Click the Transfer to Controller Button on the Toolbar
Click the Execute Button to transfer the project from the computer to the CPU unit
27
Page 28

Click the Yes Button
The operating mode changes to PROGRAM mode, and the Sysmac Studio starts
transferring the project to the CPU Unit. During the transfer, a progress bar appears in the
Synchronize Pane.
After download completion, Click The Yes Button to switch to R UN m ode.
The transfer is completed, Cl ic k the Ok Button
28
Page 29

Apply Drive/Motor data to axis via network reading
3.
Right-click Axis Setti ngs in the Multiview Explorer and select Apply drive data to axis
settings.
Click the Yes Button to acquire data from the servo drive via EtherCAT Network
Applied axis settings are based on drive and motor data:
Command pulse count per motor rotation is set to 8,388,608 following the 23 bits
resolution of the motor.
Maximum velocity and Maximum jog velocity are set based on rated speed of the
motor.
Maximum positive torque limit and Max imum negative torque limit are set based
on drive/motor maximum torque limit.
Encoder type is set to Absolute encoder.
After confirmation, Click the Ok Button.
29
Page 30

Modification of axis settings to match the XY stage System
3. Disconnect from the Controller
Right-click Axis Settings in the Multiview Explorer and select Axis setting table.
Edit axis settings accordi ng to the XY stage ball screw system
Note: Alternatively, Unit conversion settings can also be modified before transferring the project; in
that case operation settin gs will be scaled based on mm units and drive data.
Adding Axes Group Settings
4.
Right-click Axes Group Settings under Configurations and Setup - Motion Control
Setup in the Multiview Explorer and select Add - Axes Group Settings from the
menu.
30
Page 31

An axes group is added to the M ultiview Explorer.
The new axes group is displayed as MC_Group000.
Right-click the group that you added in the Multiview Explorer and select Edit from the
menu.
The axes group settings are displayed on the Axes Group Basic Settings Display in the
Edit Pane.
Set the Axes Group Basic Settings f or axes group 0 as shown in the following figure.
This concludes the axes gr oup set tings.
31
Page 32

3.6 Program making and transfer t o the CPU Unit
Create the instructions to perform linear interpolation of two axes.
The following instructions are created. To do so, we will use axis v ar ia bles, an axes group, and
motion control instructions.
Rung 0: Axes Servo ON
Rung 1: Axes homing to zero position preset
Rung 2: Axis group enable
Rung 3: Absolute position assigned to input variables
Rung 4: Movement cycle (50mm>2s ec> 50mm>2sec repeating)
Please refer to A-2 Appendix for the equivalent Structur ed Text program example
Refer to the NJ/NX-series Startup Guide for CPU Units (Cat. No. W513) for details on how to create ladder
diagrams.
Precautions for Correct Use
The sample programming that is provided in this Guide inc lu des only the programming
that is required to operate the Servomotors. When programming ac t ual a pplications,
also program EtherC AT communications, device interlocks, I/O with ot her dev ices, and
other control procedures.
32
Page 33

Transfer to the CPU Unit
1.
Click the Connect Button on the Toolbar
2.
3.
Click the Transfer to Controller Button on the Toolbar
Click the Execute Button to transfer the project from t he com put er t o the CPU unit
Click the Yes Button
The operating mode changes to PROGRAM mode, and the Sysmac Studio starts
transferring the project to the CPU Unit. During the transfer, a progress bar appears in the
Synchronize Pane.
After download completion, Click The Yes Button to switch to RUN mode.
The transfer is completed, Cl ic k the Ok Button
33
Page 34

3.7 Drives and motors parameters setup
This section explains the procedure to setup parameters of drives and motors.
The absolute encoder must be set up the first time it is used, and when the rotation data is
initialized to 0.
1.
Right-click the Servo Drive and select Setup and Tuning from the menu.
2.
The Setup and Tuning Portal appears.
Click the Quick Parameter Setup and I/O Monitor Button.
The following dialog box a ppear s. Click the Yes Button.
The Motor and Encoder s et ting Page appears.
34
Page 35

3.
An Absolute Value Clear Error (error display number: 2701) will occur, and a dialog box
4.
Click the Launch Motor and Encoder view Button.
The Encoder Properties Tab Page appears.
Click the Clear system Button.
indicating "Restart the drive to complete the operation."
5.
Click the Yes Button.
The multiple rotation dat a of the absolute encoder is cleare d.
Return to the Wizard window.
35
Page 36

Check the motor rotation direction and modify settings if required
6. Adjust the motor rotation direction and transfer to t he dr ive
7.
Validate the motor operation
Apply the test run configurat ion, activate the Servo ON and in it iate t he movement
Note: In case of Error 87.00 ESTP input, please chec k your wiring connection o r disable the
error stop input (IN1) as explained in A-1 Settings When Control Input Signals Are Not Wired
details on the settings that you must change in this case.
36
for
Page 37

8.
the EtherCAT Slave Communication Error in the CPU Unit with
Click the Back to Portal Button
9.
Please repeat the same o per at ion for the node 2.
10. Following above procedure, drives have been restart ed t o apply Input settings.
Please Reset
Troubleshooting window.
Click on Reset All button
37
Page 38

3.8 Easy Tuning (Multiple Drives)
In this section we will explain h ow t o perform Easy tuning for multi pl e Drives simultaneously.
The Motion Controller wil l perf orm the motion profile.
Before running the program, be sure to place the XY system in the homing position required.
Confirm oper at ing mode of the CPU Unit is in RUN mode and t hen use control
BOOL variables (set/reset) to cont r ol t he m ot ion control instructions.
Double-click Section0 under Programming − POUs − Programs − Program0 in the Multiview
Explorer.
The ladder program is dis play ed in the Edit Pane.
Change the BOOL variables in the following order :
ServoLock changes to TRUE, Power 1 and Power 2 are executed.
Home changes to TRUE, Home1 and Home2 are executed. Axes position is now at zero position.
(Preset position is used)
GroupeEnable changes t o TRUE, Group1 is execut ed.
Start changes to TRUE.
Linear1 is executed and positioning is started for both axes. When the positioning for Linear1 is
completed, linear1 execution stops and Linear2 is executed. This operation is repeated with 2
seconds Dwell time betw een each movement.
38
Page 39

Perform the easy tuning (Multiple dri ves)
1.
Right-click Node1: R88D-1SN01L-ECT under Configurations and Setup -EtherCAT in
the Multiview Explorer, and select Setup and Tuning from the menu.
The Setup and Tuning Portal appears in Edit Pane
2.
Click the Easy Tuning Button under Tuning (Multiple Drives)
Select Drives to Tune and click the Ok Button
39
Page 40

3.
Tuning configuration
Select Simple mode and click Next
4.
Profile and criteria
The motion profile generator is the Motion Controller.
Adjust criteria to achieve t uni ng and click Next button
Precautions for Correct Use
The Load Characteristic E st imation function may not operate properly under the
following conditions. In such cases, s et t he r elated objects manually.
Load inertia
Load
Operation
Conditions that interfere with the Load Characteristic Estimation function
• If the load inertia is small, i.e. less than 3 times the rotor inertia or large, i.e. the
applicable load inertia or more
• If the load inertia changes easily
• If the machine rigidity is extrem ely low
• If there is a non-linear element (play), such as a backlash
• If the speed continues at lower than 100 r/min
• If the acceleration/dec el eration is 2,000 r/min/s or lower
• If the acceleration/dec el eration torque is small compared with the unbalanced load
and the friction torque
• If the speed or torque oscillates due to the high gain or small effect of each filter.
40
Page 41

5.
ain will be increased gradually until achieving the specified settling time. The positioning
window, specify the position deviation to determine that the positioning is completed. If it
Auto Tune Monitor
Click the Start Button
G
detects a vibration above the vibration detection level during tuning, an adjustment failure
will occur.
Criteria achieved, click th e Ok Button
Click the Next Button
41
Page 42

6.
Check Behavior
Click the Record Button
Monitor data will be traced and automatically scaled
Confirm the behavior and clic k the Next Button
42
Page 43

7.
Finish
Confirm new gain parame t er s and s ave to EEPROM
Click the Ok Button
The easy tuning wizard for mu lt ip le dr iv es is completed
Click the Finish Button
43
Page 44

ANNEX
A-1 Settings when control input signals are not wired
An error will occur in the CPU Unit if the Servo parameters for t he Ser vo Drive are left at their defau lt
values when the Servo Dri ve control input signals are not w ired. This is because the CPU Unit st ops
operation when a drive pr ohi bit or i m me di at e s t op signal is detected. The minor fault level Controller
errors that occur are as fol lows :
• Error Stop Input (Event code: 68220000)
• Drive Prohibition Input Er r or ( Event code: 64E30000)
This section describes how to temporarily change the Servo parameters to prevent t hes e er r ors from
occurring in the CPU Unit.
The procedure described here assume that a project with a Servo Drive registered to the EtherCAT
network configuration has been transferred to the CPU Unit and that the CPU Unit is currently online.
Perform the following befo r e you perform the procedures that ar e given in this section.
• Place the Sysmac Studio online with the CPU Unit.
• Transfer to the CPU Unit the project that contains the EtherCAT network configurat ion in which the
Servo Drives are register ed.
1.
Precautions for Correct Use
If the control input signals are not wired, it will not be possible to stop operation for limit
inputs or immediate stop inputs in the event that unexpect ed motor operation occurs.
Remove the coupling fro m the motor shaft or take ot her s uitable measures to prevent a
hazardous condition from occurring.
Right-click the Servo Drive and select Setup and Tuning from the menu.
44
The Setup and Tuning Portal appears.
Page 45

2.
Click the Quick Parameter Setup and I/O Monitor Button.
The following dialog box a ppears . Click the Yes Button.
The Motor and Encoder s et t ing P age appears.
3.
Click the Next Button
The Input Signals setting Page appears.
45
Page 46

5.
Change the signal allocation of the below listed input signal, and then click the Transfer to
Drive Button.
• Error Stop Input
• Positive Drive Prohibit Input
• Negative Drive Prohibit Input
The following dialog box a ppears . Click the Yes Button
The drive restarts and you ret ur n t o t he Input Signals setting Page.
6.
Click the Next Button
The Output Signals settin g Page appears
46
Page 47

7.
Click the Next Button
8. Please Set Node2: R88D-1SN01L-ECT(E002) in t he same way as Node1.
Please click to the Copy Settings Button
The Copy Settings window appears.
47
Page 48

9.
Check boxes and click the Execute button to start the procedure
Click the Yes Button to confirm the copy settings
Click the Yes Button to transfer settings to target driv e
48
The target drive is restarti ng
Page 49

Slave Communication Error in the CPU Unit with
Settings are now effe ctive in the target drive, click the Ok Button
Click the Close Button
Click the Finish Button
This concludes the proce dure to change Input settings of Nod e 1 and Node 2.
10. Following above procedure, drives have been rest arted to apply Input settings.
Please Reset the EtherCAT
Troubleshooting window.
Click on Reset All button
49
Page 50

Confirm the below message and lick on Yes button
Errors are now resetted
50
Page 51

A-2 Program making with structured text
Below is an alternative progr am to move the XY st age with st r uc t ur ed t ext .
Power1(Axis:=MC_Axis000, Enable:=ServoLock);
Power2(Axis:=MC_Axis001, Enable:=ServoLock);
Home1(Axis:=MC_Axis000, Execute:=Home);
Home2(Axis:=MC_Axis001, Execute:=Home);
Group1(AxesGroup: =MC_Group000, Exec ut e:= G roupEnable);
Distance1[0]:=0;
Distance1[1]:=0;
Distance2[0]:=50;
Distance2[1]:=50;
Dwell_Time1:=TIME#2s;
Dwell_Time2:=TIME#2s;
Dwell1(In:=Start AND NOT Complete, PT:=Dwell_Time1, Q=>Go_Linear1);
Dwell2(In:=Start AND NOT Complete AND MoveLinear1.Done, PT:=Dwell_Time2,
Q=>Go_Linear2);
MoveLinear1(Ax esGr oup:= M C _Gr oup 000, Execute:=Go_Linear1, Position:=Distance1,
Velocity:=250, Accel eration:=8000, Deceleration:=8000);
MoveLinear2(Ax esGr oup:= M C _Gr oup 000, Execute:=Go_Linear2, Position:=Distance2,
Velocity:=250, Acceleration:=8000, Deceleration:=8000, Done=>Complete);
51
Page 52

2017
Note:DonotusethisdocumenttooperatetheUnit.
I827-E1-01
0317 (0317)
 Loading...
Loading...