

Page 1

Cat. No. I558-E2-02-X
JX
Compact and complete
Model: JX
200 V Class Three-Phase Input 0.2 to 7.5 kW
200 V Class Single-Phase Input 0.2 to 2.2 kW
400 V Class Three-Phase Input 0.4 to 7.5 kW
USER’S MANUAL
Page 2

Page 3
Introduction
Thank you for choosing the general-purpose Inverter JX. This User's Manual (hereinafter called
"this manual") describes the parameter setting methods required for installation/wiring and
operation of the JX model, as well as troubleshooting and inspection methods.
z This manual should be delivered to the actual end user of the product.
z After reading this manual, keep it handy for future reference.
z This manual describes the specifications and functions of the product as well as the relations
between them. You should assume that anything not described in this manual is not possible with
the product.
z Intended readers
This manual is intended for:
Those with knowledge of electrical systems (qualified electrical engineers or the equivalent), and
also in charge of:
• Introducing the control equipment
• Designing the control system
• Installing and/or connecting the control equipment
• Field management
Introduction
1
Page 4
Read and Understand This Manual
Read and Understand This Manual
Please read and understand this manual before using the product. Please consult your OMRON representative
if you have any questions or comments.
Warranty and Limitations of Liability
WARRANTY
OMRON's exclusive warranty is that the products are free from defects in materials and workmanship for a
period of one year (or other period if specified) from date of sale by OMRON.
OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR IMPLIED, REGARDING
NON-INFRINGEMENT, MERCHANTABILITY, OR FITNESS FOR PARTICULAR PURPOSE OF THE
PRODUCTS. ANY BUYER OR USER ACKNOWLEDGES THAT THE BUYER OR USER ALONE HAS
DETERMINED THAT THE PRODUCTS WILL SUITABLY MEET THE REQUIREMENTS OF THEIR
INTENDED USE. OMRON DISCLAIMS ALL OTHER WARRANTIES, EXPRESS OR IMPLIED.
LIMITATIONS OF LIABILITY
OMRON SHALL NOT BE RESPONSIBLE FOR SPECIAL, INDIRECT, OR CONSEQUENTIAL
DAMAGES, LOSS OF PROFITS OR COMMERCIAL LOSS IN ANY WAY CONNECTED WITH THE
PRODUCTS, WHETHER SUCH CLAIM IS BASED ON CONTRACT, WARRANTY, NEGLIGENCE, OR
STRICT LIABILITY.
In no event shall the responsibility of OMRON for any act exceed the individual price of the product on
which liability is asserted.
IN NO EVENT SHALL OMRON BE RESPONSIBLE FOR WARRANTY, REPAIR, OR OTHER CLAIMS
REGARDING THE PRODUCTS UNLESS OMRON'S ANALYSIS CONFIRMS THAT THE PRODUCTS
WERE PROPERLY HANDLED, STORED, INSTALLED, AND MAINTAINED AND NOT SUBJECT TO
CONTAMINATION, ABUSE, MISUSE, OR INAPPROPRIATE MODIFICATION OR REPAIR.
2
Page 5
Read and Understand This Manual
Application Considerations
SUITABILITY FOR USE
OMRON shall not be responsible for conformity with any standards, codes, or regulations that apply to
the combination of products in the customer's application or use of the products.
At the customer's request, OMRON will provide applicable third party certification documents identifying
ratings and limitations of use that apply to the products. This information by itself is not sufficient for a
complete determination of the suitability of the products in combination with the end product, machine,
system, or other application or use.
The following are some examples of applications for which particular attention must be given. This is not
intended to be an exhaustive list of all possible uses of the products, nor is it intended to imply that the
uses listed may be suitable for the products:
• Outdoor use, uses involving potential chemical contamination or electrical interference, or conditions
or uses not described in this manual.
• Nuclear energy control systems, combustion systems, railroad systems, aviation systems, medical
equipment, amusement machines, vehicles, safety equipment, and installations subject to separate
industry or government regulations.
• Systems, machines, and equipment that could present a risk to life or property.
Please know and observe all prohibitions of use applicable to the products.
NEVER USE THE PRODUCTS FOR AN APPLICATION INVOLVING SERIOUS RISK TO LIFE OR
PROPERTY WITHOUT ENSURING THAT THE SYSTEM AS A WHOLE HAS BEEN DESIGNED TO
ADDRESS THE RISKS, AND THAT THE OMRON PRODUCTS ARE PROPERLY RATED AND
INSTALLED FOR THE INTENDED USE WITHIN THE OVERALL EQUIPMENT OR SYSTEM.
PROGRAMMABLE PRODUCTS
OMRON shall not be responsible for the user's programming of a programmable product, or any
consequence thereof.
3
Page 6
Read and Understand This Manual
Disclaimers
CHANGE IN SPECIFICATIONS
Product specifications and accessories may be changed at any time based on improvements and other
reasons.
It is our practice to change model numbers when published ratings or features are changed, or when
significant construction changes are made. However, some specifications of the products may be
changed without any notice. When in doubt, special model numbers may be assigned to fix or establish
key specifications for your application on your request. Please consult with your OMRON representative
at any time to confirm actual specifications of purchased products.
DIMENSIONS AND WEIGHTS
Dimensions and weights are nominal and are not to be used for manufacturing purposes, even when
tolerances are shown.
PERFORMANCE DATA
Performance data given in this manual is provided as a guide for the user in determining suitability and
does not constitute a warranty. It may represent the result of OMRON's test conditions, and the users
must correlate it to actual application requirements. Actual performance is subject to the OMRON
Warranty and Limitations of Liability.
ERRORS AND OMISSIONS
The information in this manual has been carefully checked and is believed to be accurate; however, no
responsibility is assumed for clerical, typographical, or proofreading errors, or omissions.
4
Page 7
Safety Precautions
Indications and Meanings of Safety Information
In this user's manual, the following precautions and signal words are used to provide information to
ensure the safe use of the JX Inverter.
The information provided here is vital to safety. Strictly observe the precautions provided.
Meanings of Signal Words
Indicates an imminently hazardous situation which, if not avoided,
WARNING
CAUTION
is likely to result in serious injury or may result in death. Additionally
there may be severe property damage.
Indicates a potentially hazardous situation which, if not avoided,
may result in minor or moderate injury or in property damage.
Safety Precautions
Alert Symbols in This Document
Turn off the power supply and implement wiring correctly. Not doing so may result in a serious injury
due to an electric shock.
Wiring work must be carried out only by qualified personnel. Not doing so may result in a serious
injury due to an electric shock.
Be sure to ground the unit. Not doing so may result in a serious injury due to an electric shock or
fire.
(200-V class: type-D grounding, 400-V class: type-C grounding)
Do not remove the front cover during the power supply and 5 minutes after the power shutoff. Doing
so may result in a serious injury due to an electric shock.
Do not operate the Digital Operator or switches with wet hands. Doing so may result in a serious
injury due to an electric shock.
Inspection of the Inverter must be conducted after the power supply has been turned off. Not doing
so may result in a serious injury due to an electric shock.
The main power supply is not necessarily shut off even if the emergency shutoff function is
activated.
WARNING
Do not change wiring, mode change switches (S7, S8), optional devices or replace cooling fans
while the input power is being supplied.
Doing so may result in a serious injury due to an electric shock.
5
Page 8
Safety Precautions
Do not connect resistors to the terminals (+1, P/+2, N/-) directly.
Doing so might result in a small-scale fire, heat generation or damage to the unit.
Install a stop motion device to ensure safety. Not doing so might result in a minor injury. (A holding
brake is not a stop motion device designed to ensure safety.)
Be sure to use a specified type of braking resistor/regenerative braking unit. In case of a braking
resistor, install a thermal relay that monitors the temperature of the resistor. Not doing so might
result in a moderate burn due to the heat generated in the braking resistor/regenerative braking
unit. Configure a sequence that enables the Inverter power to turn off when unusual overheating is
detected in the braking resistor/regenerative braking unit.
The Inverter has high voltage parts inside which, if short-circuited, might cause damage to itself or
other property. Place covers on the openings or take other precautions to make sure that no metal
objects such as cutting bits or lead wire scraps go inside when installing and wiring.
Do not touch the Inverter fins, braking resistors and the motor, which become too hot during the
power supply and for some time after the power shutoff. Doing so may result in a burn.
CAUTION
Take safety precautions such as setting up a molded-case circuit breaker (MCCB) that matches
the Inverter capacity on the power supply side. Not doing so might result in damage to property due
to the short circuit of the load.
Do not dismantle, repair or modify the product.
Doing so may result in an injury.
UL Cautions, Warnings and Instructions
The warnings and instructions in this section summarizes the procedures necessary to ensure an inverter installation
complies with Underwriters Laboratories guidelines.
“USE 60/75×C Cu wire only” or equivalent. For models JX-AB007, -AB015, -AB022, -A2015,
-A2022, -A2037, -A2055, -A2075
“USE 75°C Cu wire only” or equivalent. For models JX-AB002, -AB004, -A2002, -A2004, -A2007,
-A4022, -A4037, -A4055, -A4075
“Use 60°C Cu wire only” or equivalent. For models JX-A4004, -A4007 and -A4015
“Open Type Equipment”
“Suitable for use on a circuit capable of delivering not more than 100k rms symmetrical amperes,
240V maximum when protected by Class CC, G, J or R fuses or circuit having an interrupting rating
not less than 100,000 rms symmetrical amperes, 240 volts maximum”. For the single and three
phases 200V models.
6
Page 9
Safety Precautions
“Suitable for use on a circuit capable of delivering not more than 100k rms symmetrical amperes,
480V maximum when protected by Class CC, G, J or R fuses or circuit having an interrupting rating
not less than 100,000 rms symmetrical amperes, 480 volts maximum”. For the 400V models
“Install device in pollution degree 2 environment”.
“Maximum Surrounding Air Temperature 50°C” or equivalent
“Caution-Risk of electric shock-capacitor discharge time is at least 5 minutes.”
“Solid state motor overload protection is provided in each model”.
“Integral solid state short circuit protection does not provide branch circuit protection. Branch circuit
protection must be provided in accordance with the National Electric Cod3e and any additional
local codes” or equivalent.
7
Page 10
Precautions for Safe Use
Precautions for Safe Use
Installation and Storage
Do not store or use the product in the following places:
•Locations subject to direct sunlight.
•Locations subject to ambient temperature exceeding the specifications.
•Locations subject to relative humidity exceeding the specifications.
•Locations subject to condensation due to severe temperature fluctuations.
•Locations subject to corrosive or flammable gases.
•Locations subject to exposure to combustibles.
•Locations subject to dust (especially iron dust) or salt.
•Locations subject to exposure to water, oil, or chemicals.
•Locations subject to shock or vibration.
Transporting, Installation, and Wiring
•Do not drop or apply a strong impact on the product. Doing so may result in damaged parts or malfunction.
•Do not hold by the front cover, but hold by the fins during transportation.
•Do not connect an AC power supply voltage to the control input/output terminals. Doing so may result in
damage to the product.
•Be sure to tighten the screws on the terminal block securely.
Wiring work must be done after installing the unit body.
•Do not connect any load other than a three-phase inductive motor to the U, V, and W output terminals.
•Take sufficient shielding measures when using the product in the following locations. Not doing so may
result in damage to the product.
Locations subject to static electricity or other forms of noise.
Locations subject to strong magnetic fields.
Locations close to power lines.
Operation and Adjustment
•Be sure to confirm the permissible range of motors and machines before operation because the Inverter
speed can be changed easily from low to high.
•Provide a separate holding brake if necessary.
Maintenance and Inspection
•Be sure to confirm safety before conducting maintenance, inspection or parts replacement.
8
Page 11
Precautions for Correct Use
Precautions for Correct Use
Installation
•Mount the product vertically on a wall or on a DIN track (optional) with the product's longer sides upright.
The material of the wall has to be nonflammable such as a metal plate.
Main Circuit Power Supply
•Confirm that the rated input voltage of the Inverter is the same as AC power supply voltage.
Error Retry Function
•Do not come close to the machine when using the error retry function because the machine may abruptly
start when stopped by an alarm.
•Be sure to confirm the RUN signal is turned off before resetting the alarm because the machine may
abruptly start.
Non-Stop Function at Momentary Power Interruption
•Do not come close to the machine when selecting restart in the non-stop function at momentary power
interruption selection (b050) because the machine may abruptly start after the power is turned on.
Operation Stop Command
•Provide a separate emergency stop switch because the STOP key on the Digital Operator is valid only when
function settings are performed.
•When checking a signal during the power supply and the voltage is erroneously applied to the control input
terminals, the motor may start abruptly. Be sure to confirm safety before checking a signal.
Product Disposal
•Comply with the local ordinance and regulations when disposing of the product.
9
Page 12
Precautions for Correct Use
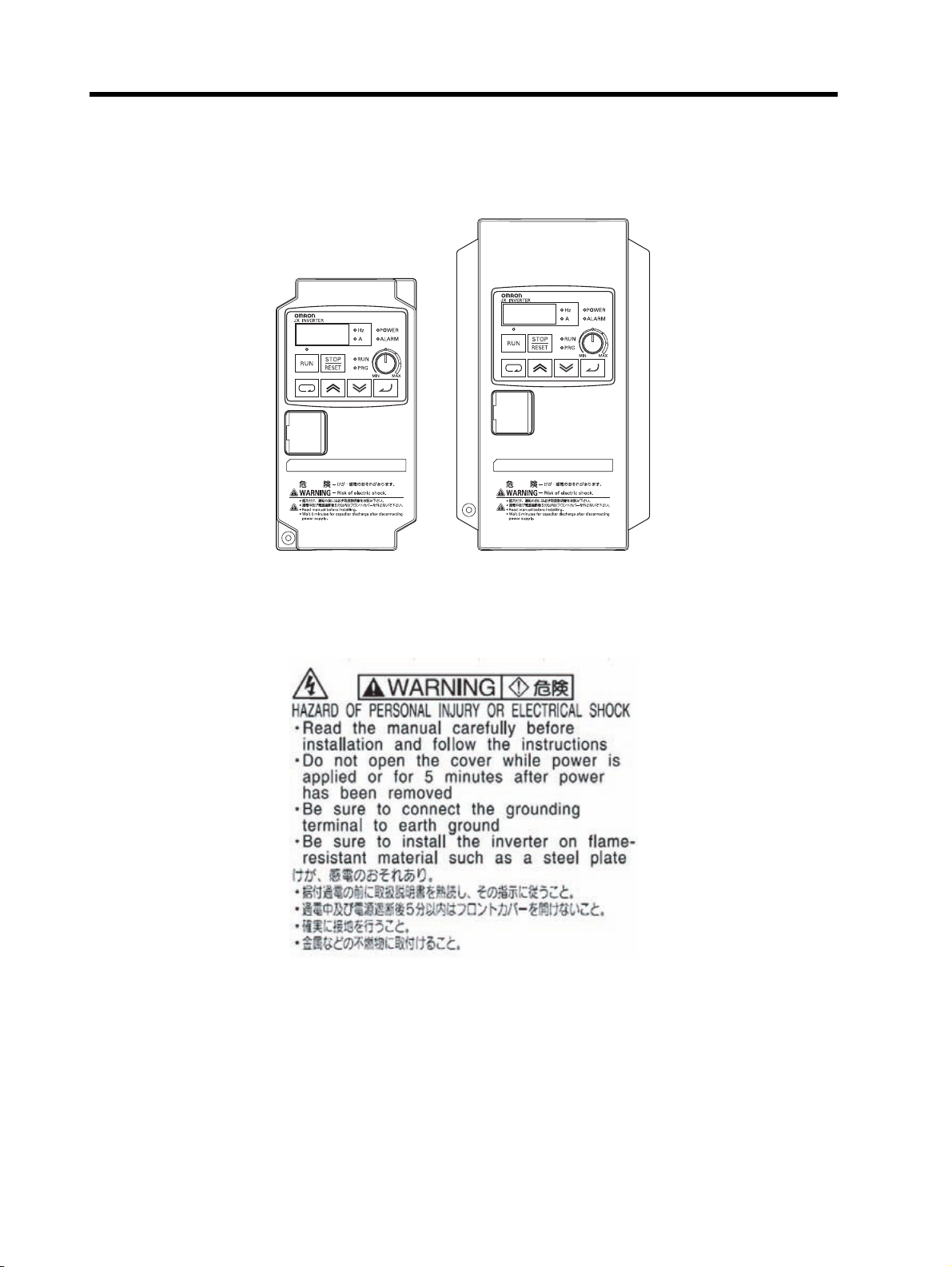
Warning Labels
Warning labels are located on the Inverter as shown in the following illustration.
Be sure to follow the instructions.
Warning Description
10
Page 13
Checking Before Unpacking
Checking the Product
On delivery, be sure to check that the delivered product is the Inverter JX model that you ordered.
Should you find any problems with the product, immediately contact your nearest local sales
representative or OMRON sales office.
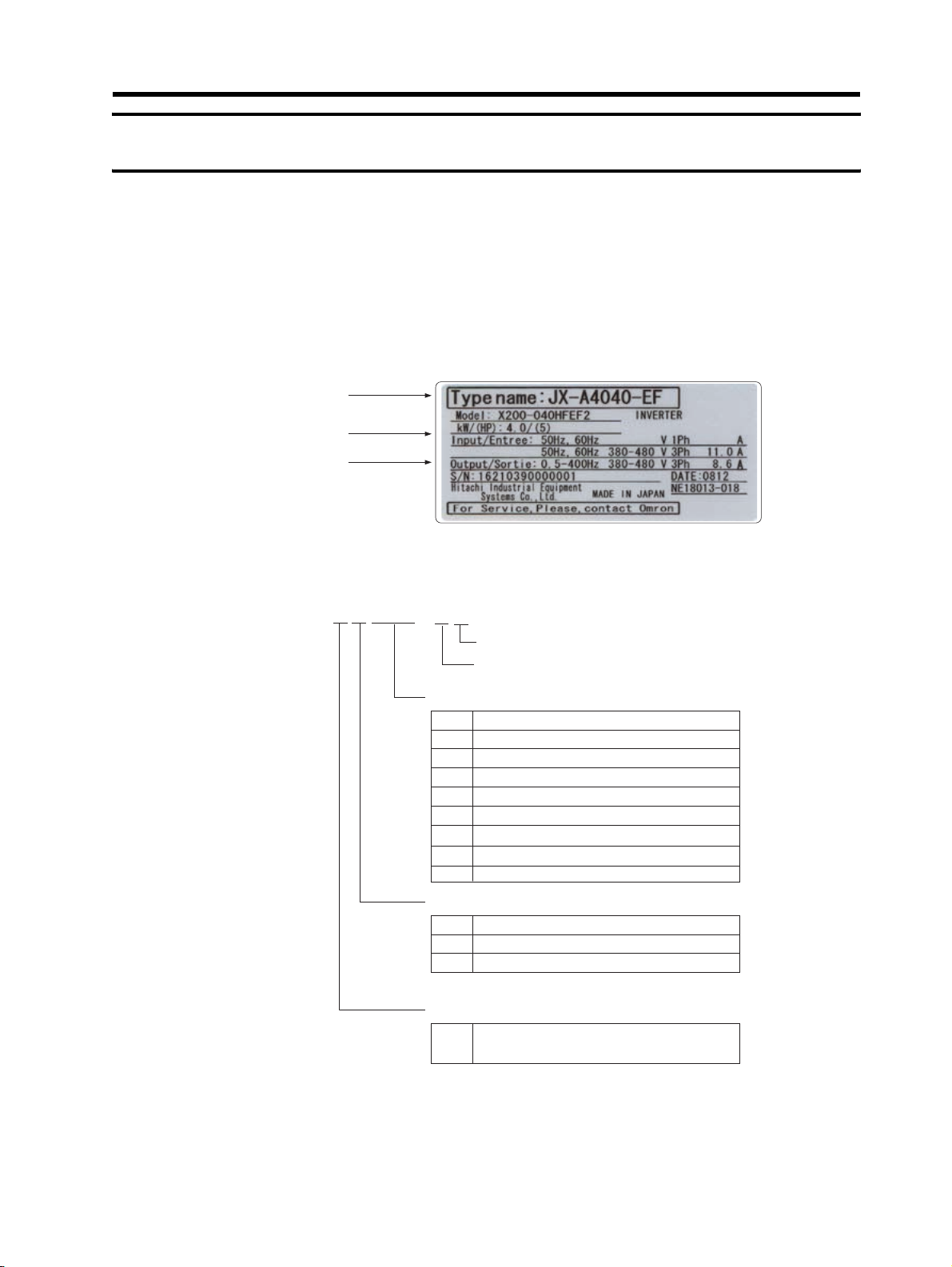
zChecking the Nameplate
Inverter model
Input specifications
Output specifications
Checking Before Unpacking
zChecking the Model
JX-AB002-EF
F: Built-in EMC filter
E: Europe standard
Maximum applicable motor capacity
0.2 kW
002
0.4 kW
004
0.75 kW
007
1.5 kW
015
2.2 kW
022
3.7 kW
037
4.0 kW
040
5.5 kW
055
7.5 kW
075
Voltage class
3-phase 200 V AC (200-V class)
2
1-phase 200 V AC (200-V class)
B
3-phase 400 V AC (400-V class)
4
Enclosure rating
Panel-mounting (IP10 min.) or closed
A
wall-mounting models
Checking the Accessories
Note that this manual is the only accessory included with the JX model.
Mounting screws and other necessary parts must be provided by the user.
11
Page 14
Revision History
Revision History
A manual revision code appears as a suffix to the catalog number located at the
lower left of the front and back covers.
Cat. No. I558-E2-02
Revision code
Revision code Revision date Changes and revision pages
October 200902
First printing
12
Page 15
About This Manual
This User's Manual is compiled chapter by chapter for user's convenience as follows.
Understanding the following configuration ensures more effective use of the product.
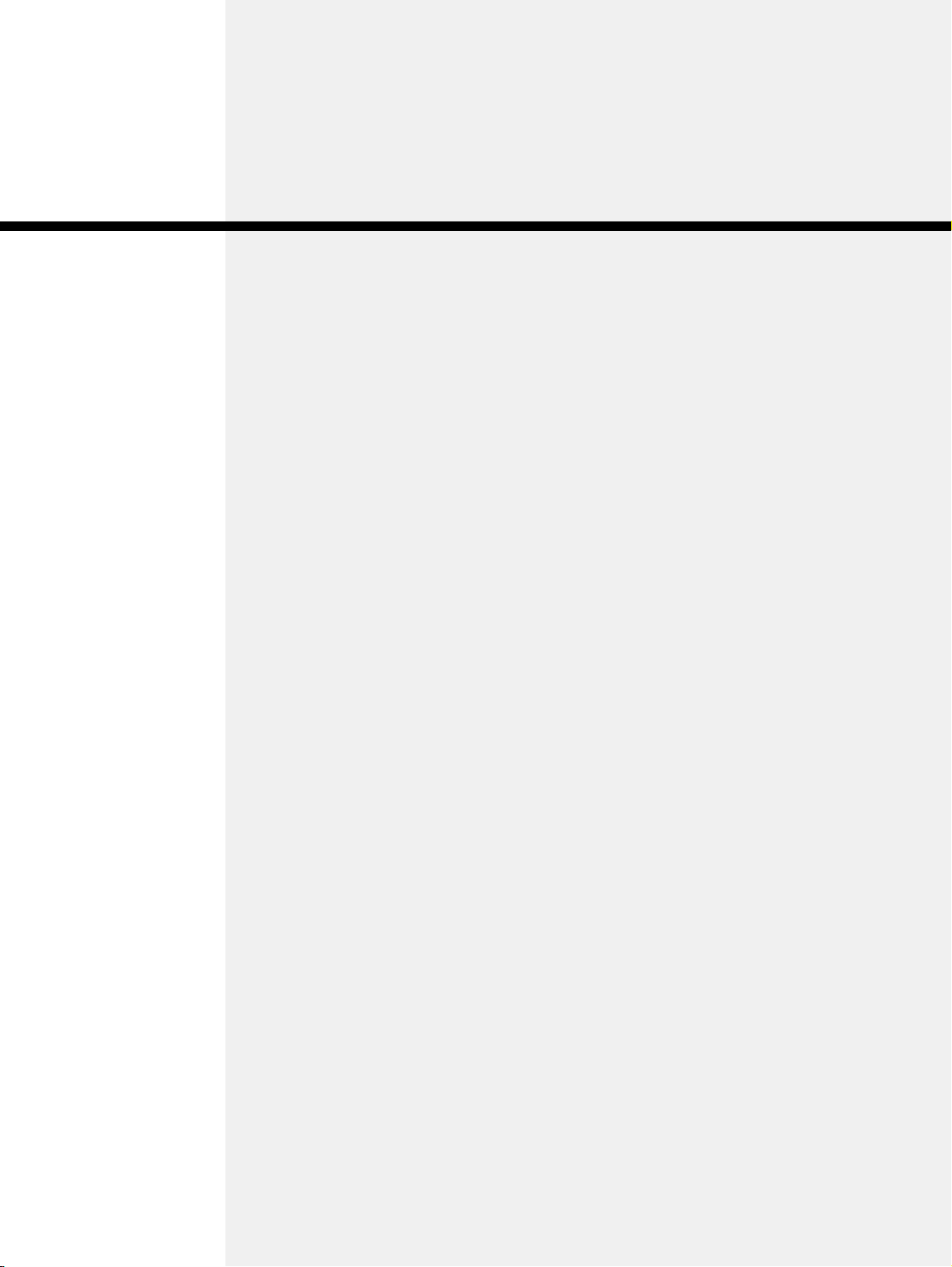
Chapter 1 Overview Describes features and names of parts.
Provides external dimensions, installation dimensions, peripheral device
Chapter 2 Design
Chapter 3 Operation
Chapter 4 Functions Describes the functions of the Inverter.
Chapter 5
Maintenance
Operations
design/selection instructions, and other information necessary for
design.
Describes names of parts, the Inverter's operations, including how to use
the keys on the Digital Operator, and the monitor function.
Describes the causes and their countermeasures if the Inverter fails,
including the solutions to possible troubles (troubleshooting).
About This Manual
Overview
Chapter 6
Chapter 7 Specifications
Appendix
Inspection and
Maintenance
Describes items for periodic inspection and/or maintenance for the
Inverter.
Provides Inverter specifications, as well as the specifications and
dimensions of peripheral devices.
Describes the summarized parameter settings as a reference for users
who have used this Inverter and understood the functions.
13
Page 16

About This Manual
14
Page 17

Contents
Introduction.............................................................................................. 1
Read and Understand This Manual.........................................................2
Safety Precautions ..................................................................................5
Precautions for Safe Use......................................................................... 8
Precautions for Correct Use ....................................................................9
Checking Before Unpacking ....................................................................11
Revision History....................................................................................... 12
About This Manual...................................................................................13
Chapter 1 Overview
1-1 Functions .................................................................................................1-2
1-2 Appearance and Names of Parts............................................................. 1-4
Chapter 2 Design
2-1 Installation................................................................................................2-2
2-2 Wiring....................................................................................................... 2-7
Chapter 3 Operation
3-1 Test Run Procedure.................................................................................3-3
3-2 Test Run Operation .................................................................................3-4
3-3 Part Names and Descriptions of the Digital Operator .............................. 3-8
3-4 Operation Procedure
(Example: Factory Default)3-10
3-5 Parameter Transition ............................................................................... 3-16
3-6 Parameter List .........................................................................................3-17
Chapter 4 Functions
4-1 Monitor Mode...........................................................................................4-2
4-2 Function Mode ......................................................................................... 4-6
Chapter 5 Maintenance Operations
5-1 Special Display List (Error Codes)........................................................... 5-2
5-2 Troubleshooting ....................................................................................... 5-6
Chapter 6 Inspection and Maintenance
6-1 Inspection and Maintenance.................................................................... 6-2
6-2 Storage ....................................................................................................6-8
15
Page 18

Contents
Chapter 7 Specifications
7-1 Standard Specification List...................................................................... 7-2
7-2 Measurement Method of Output Voltage ................................................ 7-6
7-3 Dimensional Drawing .............................................................................. 7-7
7-4 Options.................................................................................................... 7-13
Appendix
Appendix-1Parameter List ................................................................................. App-2
Appendix-2Product Life Curve ........................................................................... App-18
Index
16
Page 19
Chapter 1
Overview
1-1 Functions .......................................................... 1-2
1-2 Appearance and Names of Parts .................... 1-4
Page 20
1-1 Functions
1Overview
1
1-1 Functions
JX Inverter Models
Overview
Rated voltage Enclosure rating Max. applicable motor capacity Model
0.2 kW JX-A2002
0.4 kW JX-A2004
0.75 kW JX-A2007
3-phase 200 V AC
IP20
3-phase 400 V AC
1.5 kW JX-A2015
2.2 kW JX-A2022
3.7 kW JX-A2037
5.5 kW JX-A2055
7.5 kW JX-A2075
0.4 kW JX-A4004
0.75 kW JX-A4007
1.5 kW JX-A4015
2.2 kW JX-A4022
4.0 kW JX-A4040
5.5 kW JX-A4055
7.5 kW JX-A4075
0.2 kW JX-AB002
0.4 kW JX-AB004
1-phase 200 V AC
0.75 kW JX-AB007
1.5 kW JX-AB015
2.2 kW JX-AB022
International Standards Models (EC Directives and UL/cUL Standards)
The JX Inverter meets the EC Directives and UL/cUL standard requirements for worldwide use.
Classification Applicable standard
EC Directives
UL/cUL Standards UL508C
EMC Directive EN61800-3: 2004
Low-voltage Directive EN61800-5-1: 2003
1-2
Page 21

1-1 Functions
Compact Simplified Inverter for Customer's Environment and Application Demands
Simple Wiring and Easy Installation
The main circuit adopts upper/lower wiring as with a conductor. In addition, the side-by-side
mounting of the Inverters and the built-in zero-phase reactor contribute to space saving in control
panel.
Wide Ranging Capacity and Power Supply
In spite of its compact size, the JX Inverter provides a wide ranging capacity from 0.2 to 7.5 kW.
Moreover, the three-phase 200 V, three-phase 400 V, and single/three-phase 200 V common types
are made to meet the power supply specifications for use outside Japan.
PID Function
The PID function is featured for the easier control of the fan and pump. It helps to control airflow and
pressure.
Emergency Shutoff Function
Switching the dedicated switch (S8) changes from the multi-function input (input 3) to the
emergency shutoff input. You can directly turn off a motor control power module without operating
the software.
1
Overview
Compliance With Standards
The JX Series has achieved compliance with CE and UL/cUL.
The RoHS Directive
The standard model meets the requirements of the RoHS Directive.
Noise and Harmonics Suppression Option
The three-phase models incorporate a zero-phase reactor (radio noise filter) as a standard
specification.
For the single/three-phase common type, optional suppression is available.
When the optional DC reactor is added, the JX Series will also meet the requirements specified by
the Ministry of Land, Infrastructure, Transport and Tourism of Japan.
Handles a Variety of I/O Signals
The JX Series can handle a variety of I/O signals for wide-ranging applications.
•Analog voltage input: 0 to 10 V
•Analog current input: 4 to 20 mA
1-3
Page 22
1-2 Appearance and Names of Parts
r
1
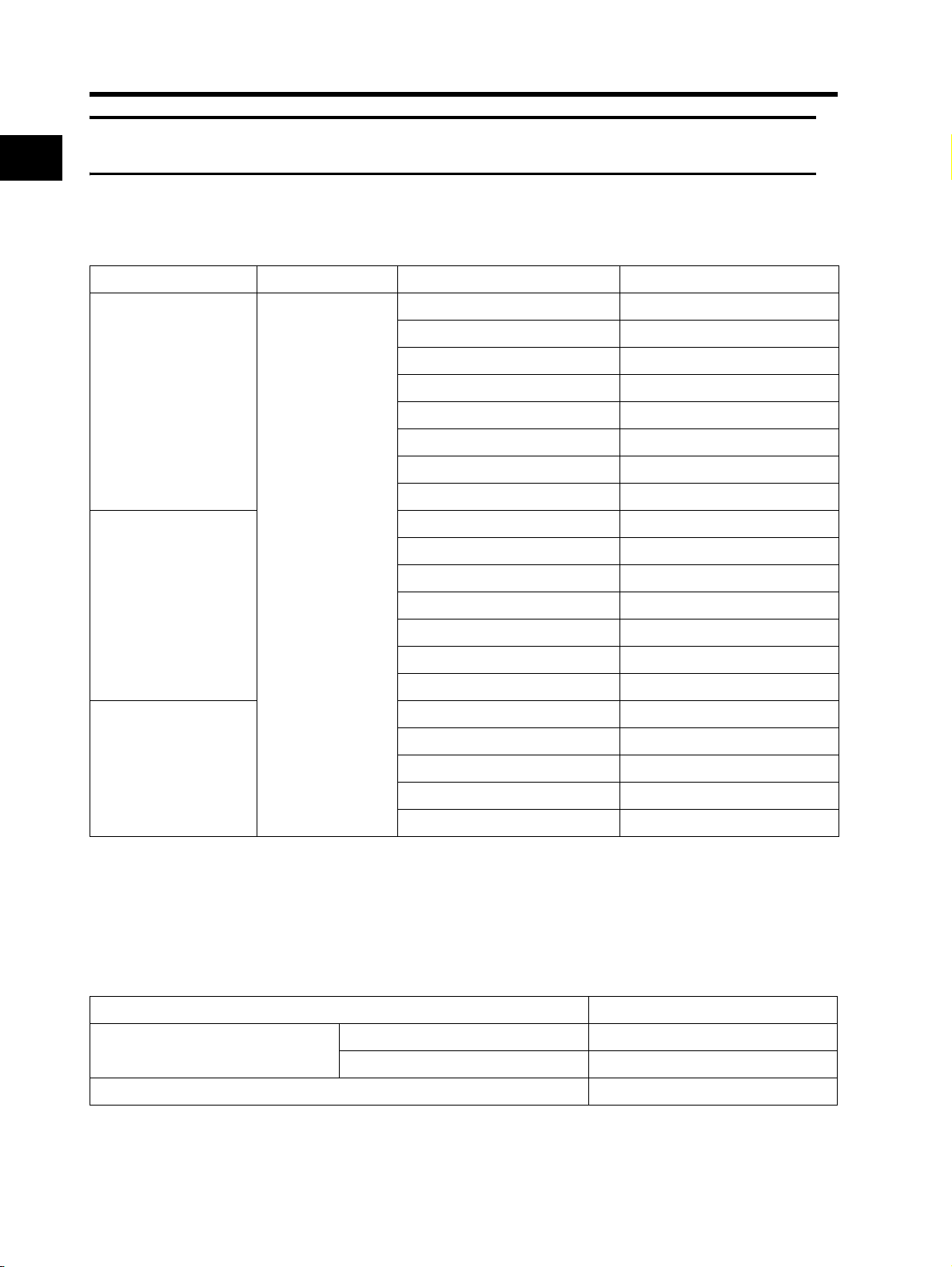
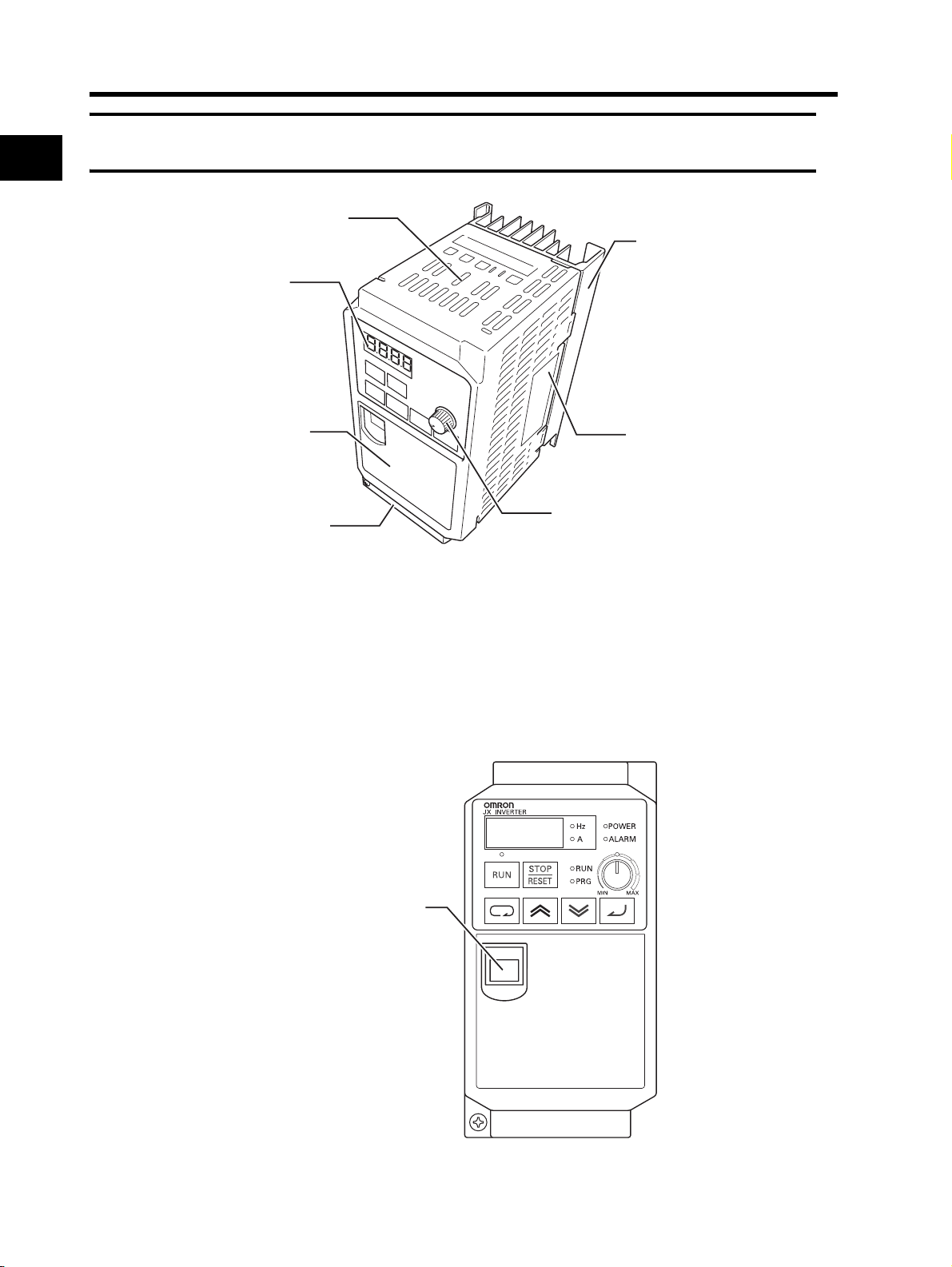
1-2 Appearance and Names of Parts
Overview
Top cover
Fin
Digital Operator
Front cover
Bottom cover
•The size of the fin varies with the motor capacity.
•There are two sizes depending on the motor capacity, but the fundamental structure is the same.
•Remove the front cover when connecting the power supply, the motor, and the control signal.
FREQ (FREQUENCY) adjuste
Main housing
Connection to RJ45 Jack
Connect the communications cable after opening the cover of the communications connector.
Remove the front cover to switch communications. Refer to "Removing the Front Cover" (page 2-
7) for instructions on how to remove the front cover.
Communications connector
8888
(with cover)
1-4
*The cover of the communications connector is removable. Remove the front cover to attach it.
Page 23
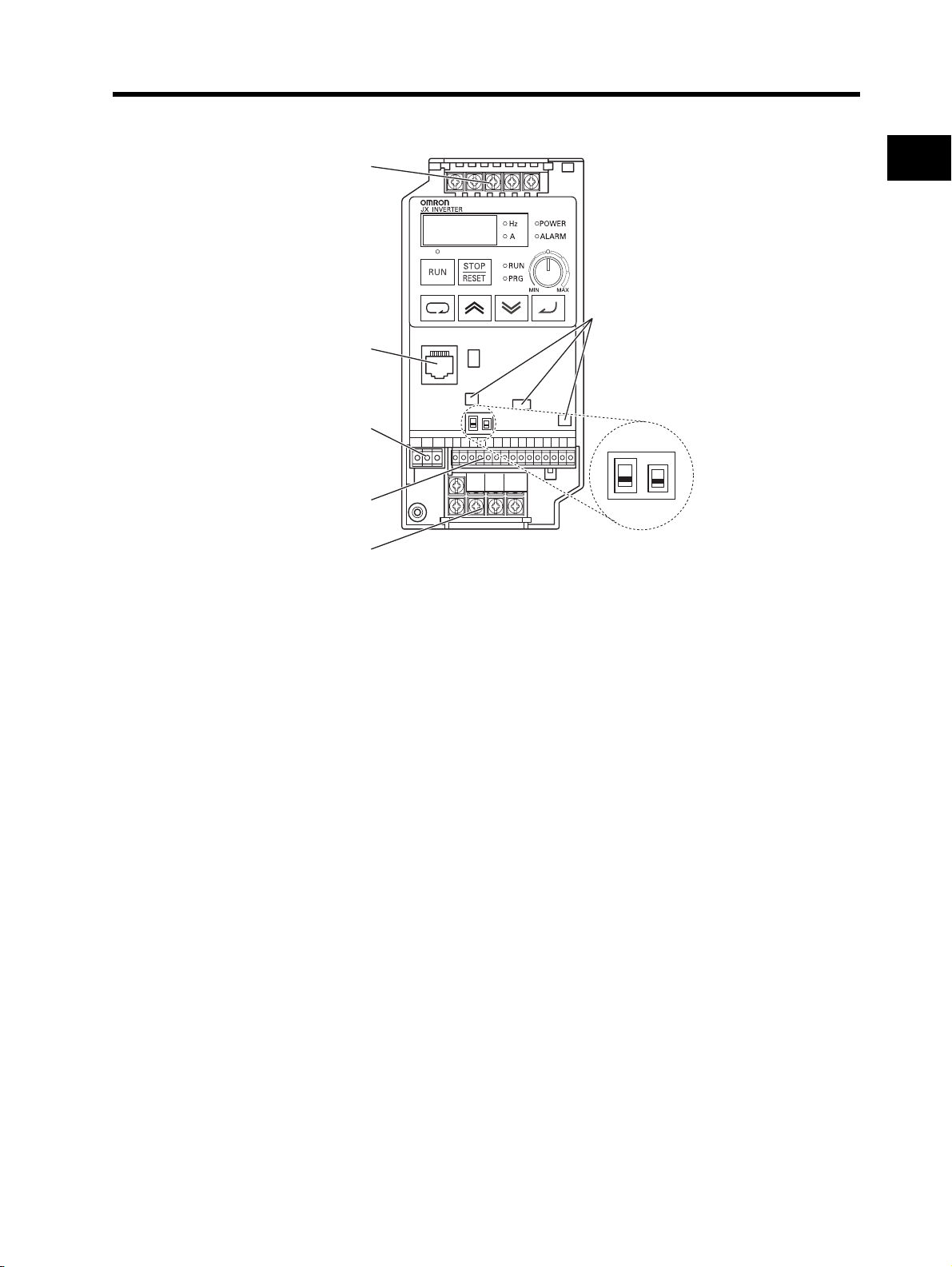
Names of Parts Inside the Front Cover
1-2 Appearance and Names of Parts
Main circuit terminal block
(input side)
8888
Communications connector
Relay output terminal block
Control circuit terminal block
Main circuit terminal block
(output side)
S7: OPE/485 communications selector (Default = OPE side)
S8: Emergency shutoff function selector (Default = OFF)
OPE
Do not touch these!
(ELECTRICAL HAZARD:
For factory maintenance only)
S7 S8
485
ON
OFF
1
Overview
(Caution)
Do not switch the emergency shutoff function selector (S8) without reason as the allocation of the
multi-function input terminals may change.
For details, refer to "Emergency Shutoff Input Function" (page 4-46).
1-5
Page 24

Page 25
Chapter 2
Design
2-1 Installation ........................................................ 2-2
2-2 Wiring ................................................................ 2-7
Page 26
2
Design
2-1 Installation
2Design
2-1 Installation
WARNING
Turn off the power supply and implement wiring correctly. Not doing so may result in a serious injury
due to an electric shock.
Wiring work must be carried out only by qualified personnel. Not doing so may result in a serious
injury due to an electric shock.
Be sure to ground the unit. Not doing so may result in a serious injury due to an electric shock or fire.
(200-V class: type-D grounding, 400-V class: type-C grounding)
CAUTION
Do not connect resistors to the terminals (PD+1, P/+, N/-) directly.
Doing so might result in a small-scale fire, heat generation or damage to the unit.
Install a stop motion device to ensure safety. Not doing so might result in a minor injury. (A holding
brake is not a stop motion device designed to ensure safety.)
Be sure to use a specified type of braking resistor/regenerative braking unit. In case of a braking
resistor, install a thermal relay that monitors the temperature of the resistor. Not doing so might result
in a moderate burn due to the heat generated in the braking resistor/regenerative braking unit.
Configure a sequence that enables the Inverter power to turn off when unusual overheating is
detected in the braking resistor/regenerative braking unit.
The Inverter has high voltage parts inside which, if short-circuited, might cause damage to itself or
other property. Place covers on the openings or take other precautions to make sure that no metal
objects such as cutting bits or lead wire scraps go inside when installing and wiring.
Safety Information
Installation and Storage
Do not store or use the product in the following places.
•Locations subject to direct sunlight.
•Locations subject to ambient temperature exceeding the specifications.
•Locations subject to relative humidity exceeding the specifications.
•Locations subject to condensation due to severe temperature fluctuations.
•Locations subject to corrosive or flammable gases.
•Locations subject to exposure to combustibles.
•Locations subject to dust (especially iron dust) or salts.
•Locations subject to exposure to water, oil, or chemicals.
•Locations subject to shock or vibration.
2-2
Page 27
2-1 Installation
Transporting, Installation, and Wiring
•Do not drop or apply strong impact on the product. Doing so may result in damaged parts or malfunction.
•Do not hold by the front cover, but hold by the fins during transportation.
•Do not connect an AC power supply voltage to the control input/output terminals. Doing so may result in
damage to the product.
•Be sure to tighten the screws on the terminal block securely.
Wiring work must be done after installing the unit body.
•Do not connect any load other than a three-phase inductive motor to the U, V, and W output terminals.
•Take sufficient shielding measures when using the product in the following locations. Not doing so may
result in damage to the product.
Locations subject to static electricity or other forms of noise.
Locations subject to strong magnetic fields.
Locations close to power lines.
Precautions for Use
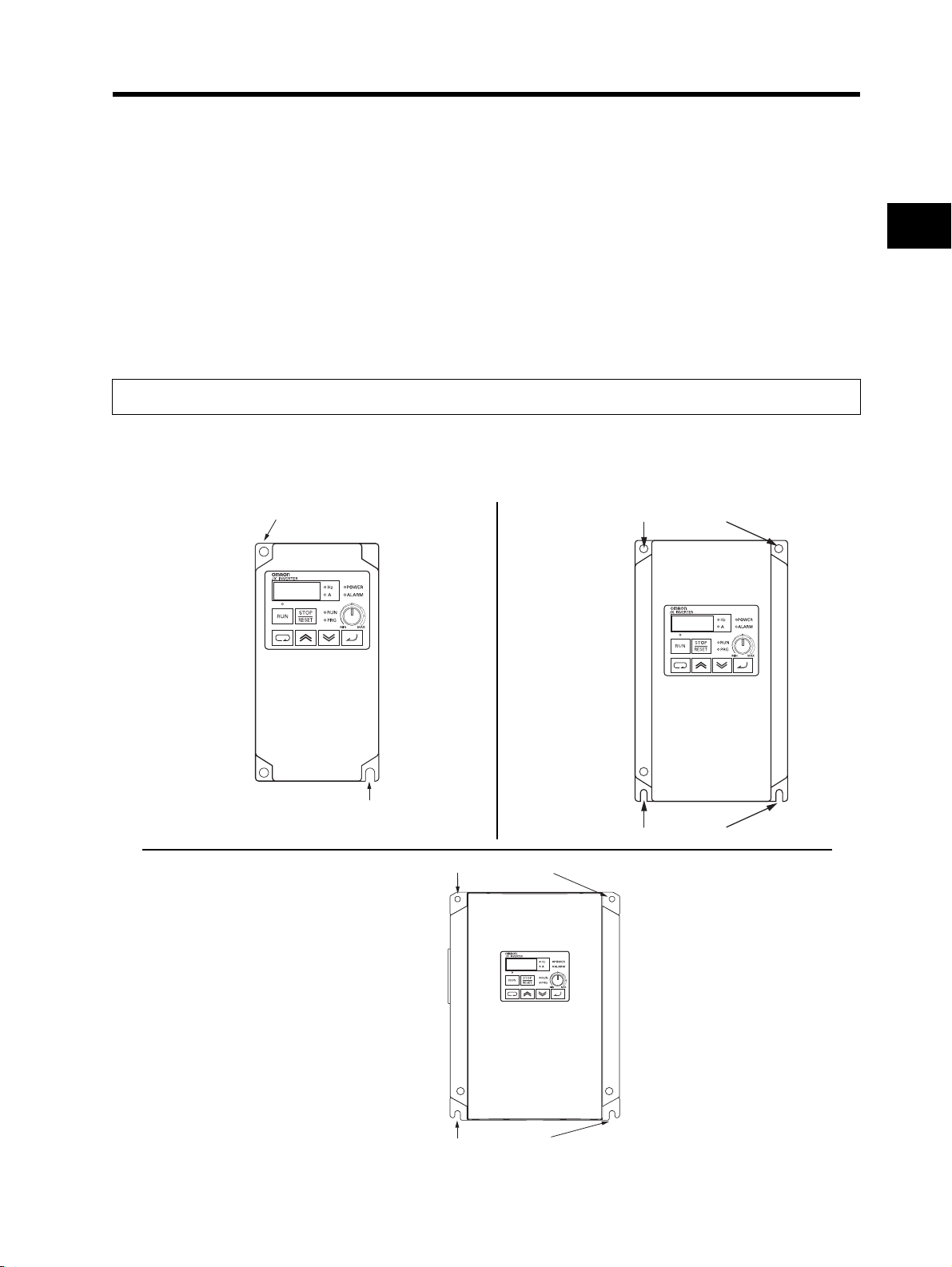
Installation
•Install the Inverter vertically on the wall or DIN tracks (optional).
Install the Inverter on a nonflammable wall surface material, like metal.
2
Design
Model
JX- A2002
A2004
A2007
AB002
AB004
Screw size for
installation: M5
Position for installing a screw
Position for installing a screw
Position for installing a screw
Model
JX-A2055
-A2075
-A4055
-A4075
Model
JX-A2015
A2022
A2037
A4004
A4007
A4015
A4022
A4040
AB007
AB015
AB022
Screw size for
installation: M5
Positions for installing screws
Positions for installing screws
Screw size for
installation: M6
Position for installing a screw
2-3
Page 28
2-1 Installation
Main Circuit Power Supply
•Confirm that the rated input voltage of the Inverter matches the AC power supply voltage.
Installation Environment
2
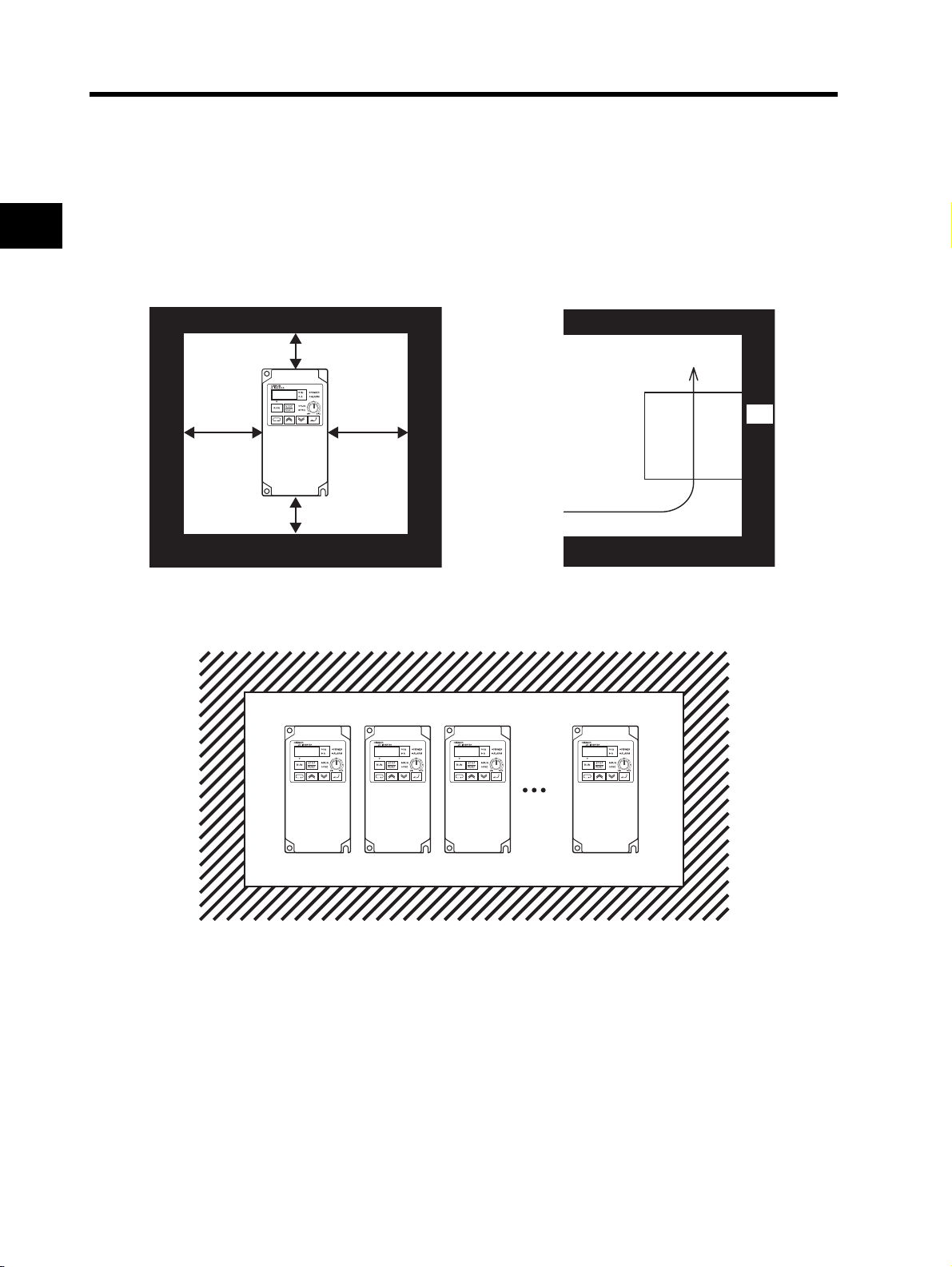
•Increased ambient temperatures will shorten the life of the Inverter.
•Keep the Inverter away from heating elements (such as a braking resistor, DC reactor, etc.).
If the Inverter is installed in a control panel, keep the ambient temperature within the range of the
specifications, taking dimensions and ventilation into consideration.
Design
10 cm min.
5 cm min. 5 cm min.
10 cm min.
•You can install multiple JX Inverters side by side in the control panel (side-by-side installation). Again, keep
the ambient temperature within the specified range (40°C or below).
Airflow
Wall
•If the ambient temperature is from 40°C through to 50°C, the carrier frequency should be reduced and the
Inverter capacity should be increased. Refer to ambient temperature derating.
2-4
Page 29
2-1 Installation
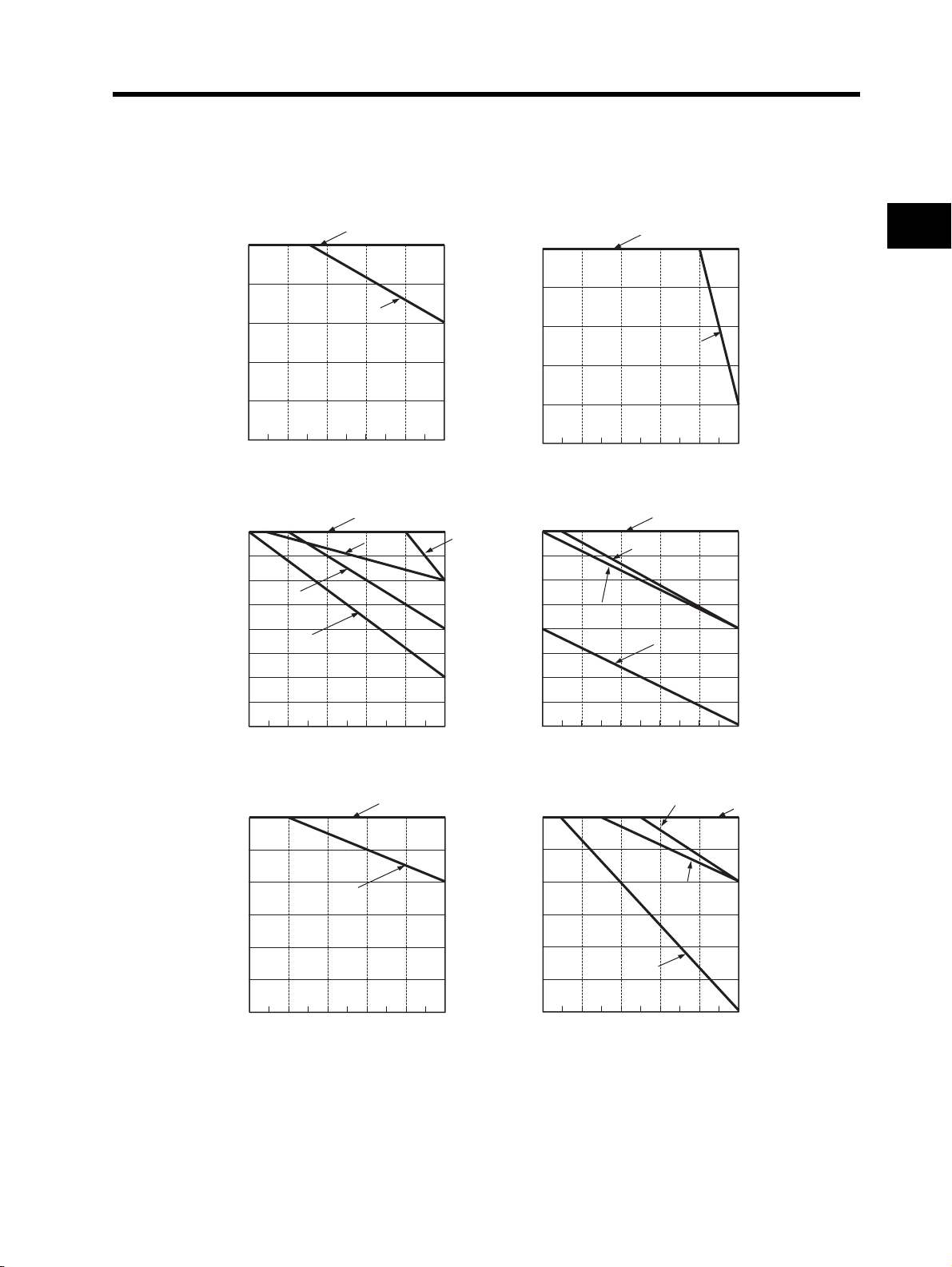
•To raise the carrier frequency, reduce the output current (or derate the rated current) as shown in the graph
below.
(1) Ambient temperature 40°C
200-V Class
100%
0.2 to 2.2 · 5.5/7.5kW
100%
400-V Class
0.4 to 2.2 · 5.5/7.5kW
2
95%
90%
85%
80%
Output current (Rated current %)
75%
4 6 8 10 12
2
Carrier frequency [kHz]
3.7kW
(2) Ambient temperature 50°C
200-V Class
100%
95%
90%
0.75kW
85%
80%
75%
70%
65%
Output current (Rated current %)
60%
3.7kW
2
4 6 8 10 12
Carrier frequency [kHz] Carrier frequency [kHz]
0.2/0.4/2.2/5.5kW
7.5kW
1.5kW
95%
90%
85%
80%
Output current (Rated current %)
75%
100%
95%
90%
85%
80%
75%
70%
65%
Output current (Rated current %)
60%
4 6 8 10 12
2
Carrier frequency [kHz]
400-V Class
0.4 to 1.5/7.5kW
2.2kW
4 6 8 10 12
2
Design
3.7kW
5.5kW
3.7kW
(3) Side-By-Side installation (ambient temperature:40°C)
200-V Class
100%
95%
90%
85%
80%
75%
Output current (Rated current %)
70%
2
3.7 kW
4 6 8 10 12
Carrier frequency [kHz]
0.2 to 2.2 · 5.5/7.5kW
100%
Output current (Rated current %)
95%
90%
85%
80%
75%
70%
400-V Class
4 6 8 10 12
2
Carrier frequency [kHz]
0.4 to 2.2kW
3.7kW
5.5/kW
7.5kW
2-5
Page 30
2
Design
2-1 Installation
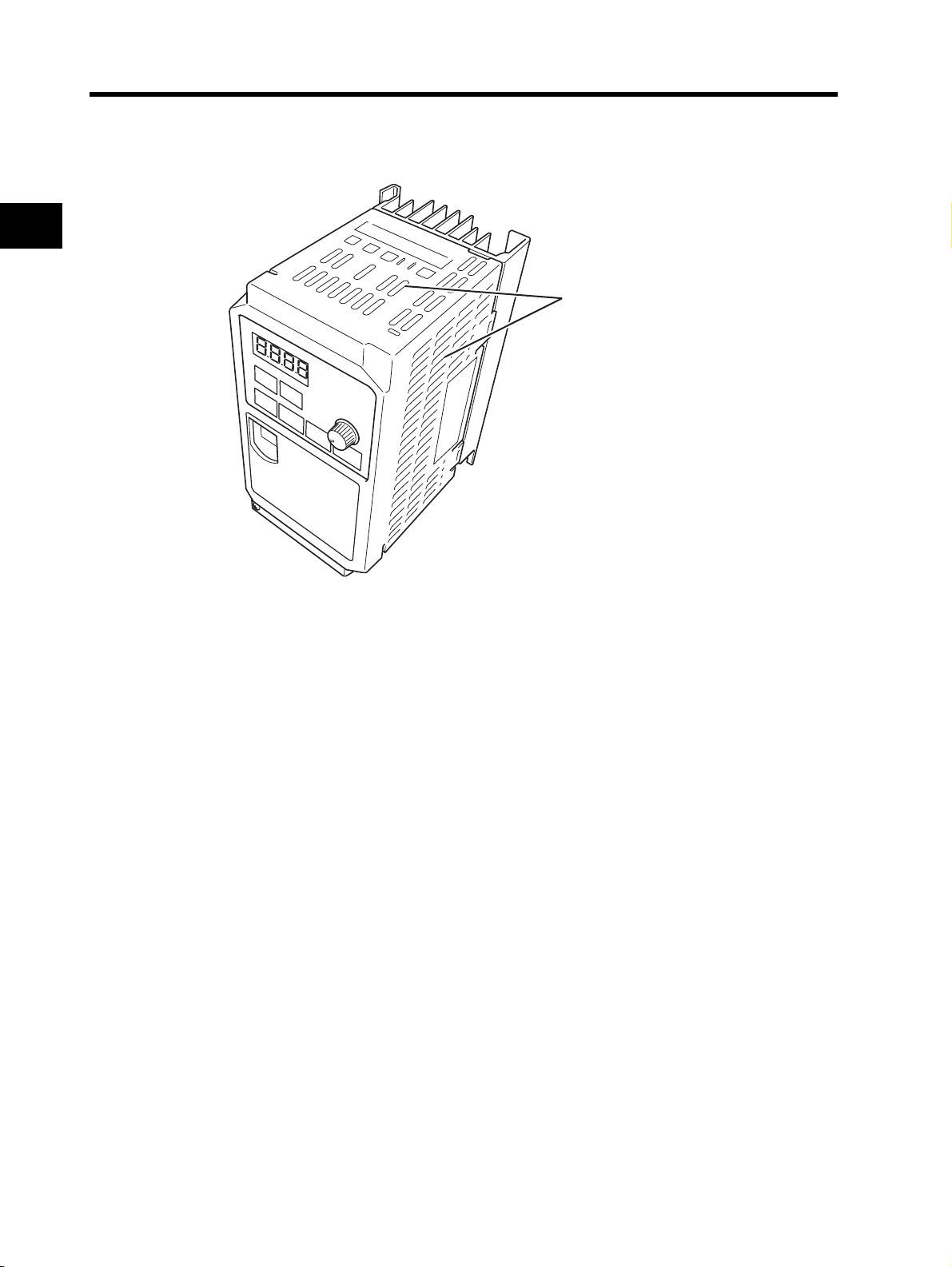
•Before installing the Inverter, place a cover over all the ventilation openings to shield them from foreign
objects.
After completing the installation process, be sure to remove the covers from the Inverter before operation.
Ventilation openings
(Both sides and top)
2-6
Page 31

2-2 Wiring
2-2 Wiring
Removing and Mounting the Front Cover
Removing the Front Cover
Loosen the mounting screw at the lower left of the front cover. Lift the bottom of the front cover to
remove while holding the body.
1. Loosen the front cover mounting screw.
2. Lift the bottom of the front cover to remove.
2
Design
2-7
Page 32

2
Design
2-2 Wiring
Mounting the Front Cover
Hang the upper side of the front cover on the hooks, and push down both sides of the cover
simultaneously until it clicks into place.
1. Hang the upper side on the hooks. (Two hooks)
2. Push down the cover until it clicks into place. (Both sides)
2-8
Page 33

Standard Connection Diagram
2-2 Wiring
Inverter
3-phase 200 V AC
1-phase 200 V AC *1
3-phase 400 V AC
Multi-function input 5
Multi-function input 4
Multi-function input 3
Multi-function input 2
Multi-function input 1
Analog monitor output
Frequency meter
Frequency
setting unit
1 to 2 kΩ
Power supply input
4 to 20 mA DC
For Sink logic
R/L1 (L1)
S/L2 (L2)
T/L3 (N/L3)
P24 24V DC
PCS
AM
H
O
OI
L
5
4
3
2
1
L
10 V DC
4.7 kΩ
250 Ω
10 kΩ
U/T1
V/T2
W/T3
Note:
To connect the DC reactor,
remove the short-circuit bar.
PD/+1
P/+
N/-
AL1
AL2
AL0
CM2
11
Relay output
Common
RY
Multi-function output common
Motor
2
Design
DC reactor
Multi-function output
24 V DC
Different terminals have different commons.
Terminals 1, 2, 3, 4, 5 AM H, O, OI 11
Sink logic - L
Commons
LCM2
Source logic - PCS
Main circuit power supply
*2
RUN command
Output frequency
Motor rotation speed
2.0 s min.
*1.) Use terminals L1 and N for single phase model JX-AB
*2.) If the main circuit is turned on at the same time as a RUN command is input, the motor begins to rotate at
least 2.0 seconds later.
Secure a duty cycle of 5 minutes or more between switching the power ON/OFF. Otherwise, the life of the
Inverter is shortened.
Do not turn off the main circuit during operation.
2-9
Page 34

2-2 Wiring
Wiring to the Power Supply and Motor
2
Design
(Example) JX-A2004
Main circuit terminal block (input side)
Main circuit terminal block (output side)
Power supply
Ground
(Example) JX-A2037
Main circuit terminal block (input side)
Main circuit terminal block (output side)
Power supply
Ground
R/L1S/L2 T/L3
N/- P/+ +1
U/T1 V/T2 W/T3
Motor
earth
Motor
•Do not connect the power supply other than to R/L1, S/L2, or T/L3.
•Do not remove the short-circuit bar between P/+2 and +1, except when a DC reactor is connected.
Note 1: Install an earth leakage breaker on the power supply input side.
(Select an earth leakage breaker having a higher sensed leakage current and avoid
unnecessary operation.)
If the wiring between the Inverter and the motor is too long (longer than 10 m), the motors
thermal relay may malfunction due to harmonics. Install an AC reactor on the Inverter output
side, or use a current sensor instead of the motors thermal relay.
Motor
earth
R/L1S/L2T/L3
U/T1V/T2
W/T3
Motor
N/- P/+ +1
2-10
Page 35

2-2 Wiring
Note 2: Connect securely to the ground as specified (type-D grounding for 200-V class, and
type-C grounding for 400-V class). Do not share the grounding electrode with other strong
electrical devices.
Example of incorrect grounding Example of correct grounding
Inverter
Inverter
Inverter
Inverter
Ground bolt
Inverter
Inverter
Wiring the Control Circuit Terminals and Relay Terminals
Relay
output
Analog
monitor
output
Frequency
reference
input
AL2 AL1 AL0
Multi-function input
Multi-function
output
2
Design
AM
H O OI L 5 4 3 2 1 L
PCS P24
CM2
11
Short-circuit bar
2-11
Page 36

2
Design
2-2 Wiring
Wiring Example of the Control Circuit Terminal Block (Sink Logic)
At sink logic (NPN) : External power supply input
At source logic (PNP) : Power supply output
Note: By factory default, the input logic of the multi-function input terminal circuit is
set to the sink logic using internal supply.
Reverse rotation RUN command
Forward rotation RUN command
AM
Frequency meter
HO OI L 5 4 3 2 1 L
Variable resistor
frequency reference
(1 to 2 k) Note 3
Input common
Reset input
Multi-step speed reference 2
Multi-step speed reference 1
External power supply
terminal for input signal
PCS P24
Short-circuit bar
(at sink logic
[when internal
power supply is
used]) Note 2
Frequency arrival signal
(27 V DC 50 mA max.)
Note 1
CM2 11
RY
Note 1: When connecting a relay to the multi-function output terminal, install a surge-absorbing
diode in parallel with the relay. The output circuit can break down due to surge voltage when
the relay is switched on/off.
Note 2: Remove the short-circuit bar when the external power supply is used.
Note 3: For the Analogue signal line, use a twisted shield wire and apply an insulating sleeve to the
shield as illustrated below. Keep the length to 20 m or less.
Install insulating Sleeve.
Ground connection is not required.
Connect to the ground terminal of the Inverter.
Note 4: Keep the wiring away from the power cable of the main circuit and from the wiring on the
relay control circuit. (More than 10 cm apart)
2-12
Page 37

Selecting the Sequence Input Method (Sink/Source Logic)
Logic Selection Method for the Multi-function Input Terminals
When the internal power supply is used, you can switch the logic by rearranging the short-circuit bar
on the control circuit terminal block. The default setting is sink logic.
2-2 Wiring
2
<Sink Logic>
1 L PCS P24 CM2
Short-circuit bar
Note 1: Remove the short-circuit bar when the external power supply is used.
Inside the Inverter
When Internal interface power supply is used
+V
Short-circuit
bar
Sink logicSource logic
COM
Output unit etc.
P24
PCS
L
1
5
Inverter
24 V DC
<Source Logic>
1 L PCS P24
Short-circuit bar
When external power supply is used
Output unit etc.
+V
COM
CM2
DC24V
P24
PCS
L
1
5
Inverter
Design
24 V DC
COM
0V
Output unit etc.
Short-circuit
bar
P24
PCS
L
1
5
Inverter
24 V DC
\
COM
24 V DC
0V
Output unit etc.
P24
PCS
L
1
5
Inverter
24 V DC
2-13
Page 38

2-2 Wiring
Wiring the Main Circuit Terminals
Connecting the Main Circuit Terminals
2
Design
Motor output
(kW)
Applicable Inverter model
0.2 JX-A2002 1.25 mm
JX-A2004
0.4
JX-A4004 3 A
JX-A2007 2.0 mm
0.75
JX-A4007 1.25 mm
JX-A2015 2.0 mm
1.5
JX-A4015 2.0 mm
JX-A2022 2.0 mm
2.2
JX-A4022 2.0 mm
JX-A2037 3.5 mm
3.7
JX-A4040 2.0 mm
JX-A2055 5.5 mm
5.5
JX-A4055 3.5 mm
JX-A2075 8.0 mm
7.5
JX-A4075 3.5 mm
0.2 JX-AB002 2.0 mm
0.4 JX-AB004 2.0 mm
0.75 JX-AB007 2.0 mm
1.5 JX-AB015 5.5 mm
2.2 JX-AB022 5.5 mm
Wiring Applicable device
Power cable
2
1.25 mm
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
Earth leakage breaker
(ELB)
5 A 10 A
5 A
10 A 15 A
5 A 6 A
15 A 15 A
10 A 10 A
20 A 20 A
10 A 10 A
30 A 30 A
15 A 15 A
50 A 40 A
30 A 20 A
60 A 50 A
30 A 25 A
5A 14 A
5 A ⎯
10 A ⎯
15 A ⎯
20A ⎯
Fuse size
(class J)
Rated 600 V
10 A
•For the main circuit terminals, always use insulated electrical wires with a rated voltage of 600 V and a rated
temperature of 80°C or higher.
•Use the crimp-type terminal with an insulating sleeve to connect to the terminals.
•Up to two wires can be connected to one terminal.
•To prevent possible voltage drops, increase the wire size in accordance with the cable length.
•To connect the 200-V model to the relay output terminal block, use a wire of 0.75 mm
•To connect seven wires or more to the control circuit terminal block, use a shield line of 0.5 mm
2
.
2
or less.
•Strip the signal line by 5 to 6 mm, and connect the exposed wire. (In the case of stranded wires, make sure that
the wires are not unraveled.)
•Make sure that the maximum outside diameter of the signal cable is 2.0 mm or less (except for the alarm signal
cable). (For cable and multi-core cable fitted with cable markers, keep both the cable markers and the sheathstripped length 40 mm or more from the connecting end. As a thick cables may prevent proper closing of the
terminal block cover.)
•To meet UL standards, always insert a UL-standard fuse (J type) on the power supply side.
•Use a ground wire with a larger diameter than that of the power cable shown above.
2-14
Page 39

2-2 Wiring
Choose the sensitivity current of the earth leakage breaker (ELB), depending on the total distance (L) between
the Inverter and the power supply, and the Inverter and the motor.
For models with build-in filter a time delay ELB could be necessary in some cases.
L
100 m max. 30
300 m max. 100
Sensitivity
current (mA)
Guide of leakage current: If a CV wire is used and routed through a metal pipe,
Due to the higher specific inductive capacity of the H-IV wire, the leakage current
increases about eight times. Use a wire with a sensitivity current one-level higher.
The leakage current mentioned here is the effective value of the fundamental
wave, and high-frequency currents are excluded.
800 m max. 200
Terminal Arrangement
Main circuit terminal block Model (JX-) Screw size W (mm)
Upper side of the body
R/L1 S/L2 T/L3
Lower side of the body
N/- P/+ PD+1
U/T1 V/T2
W/T3
the leakage current is 30 mA/km.
A2002 to A2007
AB002 to AB004
(*1)
M3.5 7.1
2
Design
7.1
Main Circuit
Terminal Block
Upper side of the body
A2015 to A2037
R/L1 S/L2 T/L3
Lower side of the body
U/T1 V/T2 W/T3 N/- P/+ PD+1
A4004 to A4040
AB007 to AB022
(*1)
A2055 to A2075
A4055 to A4075
M4 9.2
M5 13
*1. For JX-AB, R/L1 corresponds to L1 and T/L3 to N, terminal S/L2 is not available.
Connect a single-phase 200-V AC input to terminals L1 and N.
Relay Output
Terminal Block
AL2 AL1 AL0
AM H O OI L 5
Control Circuit Terminal Block
4 3 2 1 L PCS P24 CM2 11
9.2 or 13
Main Circuit
Terminal Block
2-15
Page 40

2-2 Wiring
2
Design
Model
(JX-)
Main circuit M3.5 7.1 M4 9.2 M5 13
Control circuit M2 ⎯ M2 ⎯ M2 ⎯
Relay M2.5 ⎯ M2.5 ⎯ M2.5 ⎯
Ground M4 ⎯ M4 ⎯ M5 13
A2002 to A2007
AB002 to AB004
Screw size W (mm) Screw size W (mm) Screw size W (mm)
A2015 to A2037
A4004 to A4040
AB007 to AB022
A2055 to A2075
A4055 to A4075
Screw Tightening Torque
Screw Tightening torque
M2 0.2 N•m (max. 0.25 N•m)
M2.5 0.5 N•m (max. 0.6N•m)
M3.5 0.8 N•m (max. 0.9 N•m)
M4 1.2 N•m (max. 1.3 N•m)
M5 3.0 N•m (max. 3.3 N•m)
Explanation of the Main Circuit Terminal Connection
Terminal
symbol
R/L1, S/L2,
T/L3 *
U/T1,
V/T2, W/T3
PD/+1,
P/+
P/+, N/-
* For JX-AB's terminal symbols, R/L1 corresponds to L1, S/L2 to L2, and T/L3 to N/L3.
Connect a single-phase 200-V AC input to terminals L1 and N.
Terminal name Function Connection example
Main power supply
input terminal
Inverter output
terminal
External DC reactor
terminal
Regenerative
braking unit
connection terminal
Ground terminal
Connect the input power supply.
Connect to the motor.
Normally connected by the short-circuit
bar. Remove the short-circuit bar
between PD/+1 and P/+ when a DC
reactor is connected.
Connect optional regenerative braking
units.
Ground (Connect to ground to prevent
electric shock and reduce noise.)
ELB
Power supply
Do not remove the short-circuit bar
between PD/+1 and P/+ when a DC
reactor is not connected.
Motor
2-16
Page 41

Main Circuit Connection Diagram
2-2 Wiring
Molded case
circuit-breaker
(MCCB)
Power supply
MC
AC reactor
noise filter
Fuse
R/L1
S/L2
T/L3 *
Inverter
JX
* For JX-AB's terminal symbols, R/L1 corresponds to L1 and T/L3 to N.
Wiring the Main Circuit Terminals (Input Side)
Installing a Molded-case Circuit Breaker (MCCB)
•Always connect the Inverter and power supply via a molded-case circuit breaker (MCCB) to protect
the Inverter from damage that may result from short-circuiting.
•Always connect the power input terminals (R/L1, S/L2, and T/L3) and power supply via an MCCB,
according to the Inverter capacity.
•Install one MCCB per Inverter.
•Choose an appropriate MCCB capacity according to the fuse size on page 2-14.
•When choosing MCCB's time characteristics, be sure to consider the Inverter's overload protection
(1 minute at 150% of the rated output current).
•By programming the sequence as illustrated below, you can turn off the power via the relay outputs
(AL2, AL1, and AL0) for the JX Series.
Regenerative
braking unit
P/+ N/-
U/T1
V/T2
W/T3
2
M
Design
Molded-case
Power supply
circuit breaker
(MCCB)
MC
OFF
ON
X1
X1
X1
X2
X2
DC (24 V) relay
R/L1
S/L2
T/L3 *
AL2
AL0
Inverter JX
(30 V DC, 50 mA max.)
* For JX-AB's terminal symbols, R/L1 corresponds to L1and T/L3 to N.
Installing a Ground Fault Interrupter
•The Inverter's output uses high-speed switching, and so generates high-frequency current
leakage. (Generally, if the power cable is 1 m, the leakage current is approx. 100 mA per Inverter,
and approx. 5 mA is added per additional meter of the power cable.)
•At the power supply input part, install a special-purpose ground fault interrupter for Inverters that
excludes high-frequency leakage current and detects only the leakage current within a frequency
range that is hazardous to humans. (Choose a ground fault interrupter with a sensitivity current of
at least 10 mA per Inverter or bigger one if build-in filter or a external filter is used.)
•Alternatively, use a general ground fault interrupter with a sensitivity current of 200 mA or more per
Inverter, and with an operating time of 0.1 s or more.
2-17
Page 42

2-2 Wiring
Installing a Magnetic Contactor (MC)
•If the power supply of the main circuit is shut off due to sequencing, a magnetic contactor (MC) can
be used. (When forcibly stopping the load with an MC on the primary side of the main circuit,
however, the regenerative braking does not work and the load coasts to a stop (free run).)
•Frequently opening and closing the magnetic contactor (MC) to start and stop a load may cause
2
Connection Sequence to the Terminal Block
damage to the Inverter. To extend the life of the Inverter's internal electrolytic capacitor, limit the
frequency to no more than once every 30 minutes.
•Input power supply can be connected to any terminal because the phase sequence of the input
power supply is irrelevant to that of the terminal block (R/L1, S/L2, and T/L3).
Design
Installing an AC Reactor
•If the Inverter is connected to a large-capacity power transformer (660 kVA or more) or the phase
advance capacitor is in use, a large peak current may flow through the input power circuit, causing
damage to the converter unit.
•Install an optional AC reactor on the input side of the Inverter. An AC reactor will also improve the
power factor of the power input side.
Installing a Surge Absorber
•Always use a surge absorber or diode when magnetic contactors (MC), electromagnetic relays,
solenoid valves, solenoid, and magnetic brakes are used.
Installing a EMC Filter on the Input Side
•The Inverter's output uses high-speed switching, so noise may be transmitted from the Inverter to
the power line, affecting peripheral devices.
•It is recommended that a noise filter be installed on the input side to minimize noise transmission.
(Installing a noise filter on the input side can also reduce the noise from the power line to the
Inverter.)
Recommended Input Filters for the Inverter
EMC-conforming
AX-FIJ
2-18
Molded-case
circuit breaker
Power supply
(MCCB)
Molded-case
circuit breaker
(MCCB)
AX-FIJxxxx
Inverter
JX
Other device
M
* Use the recommended noise filter for each inverter. A general-purpose noise filter will be less ef-
fective and may not reduce noise.
Page 43

Wiring the Main Circuit Terminals (Output Side)
Connect the Terminal Block to the Load
•Connect motor output terminals U/T1, V/T2, and W/T3 to motor lead wires U, V, and W.
•Check that the motor rotates forward with the forward command. Switch over any two of the output
terminals (U/T1, V/T2, W/T3) and reconnect if the motor rotates in reverse to the forward
command.
2-2 Wiring
2
Never Connect a Power Supply to the Output Terminals
•If voltage is applied to the output terminals, the internal circuit of the Inverter will be damaged.
Never connect a power supply to output terminals U/T1, V/T2, or W/T3.
Never Short-circuit or Ground the Output Terminals
•Never touch the output terminals by hand.
•If the output wires come into contact with metal materials, an electric shock or ground fault will
occur. This is extremely hazardous. Be careful not to short-circuit the output wires.
Do Not Use a Phase Advance Capacitor or Noise Filter
•Doing so may result in damage to the Inverter or cause the parts to burn. Never connect a phase
advance capacitor or LC/RC noise filter to the output circuit.
Do Not Use an Electromagnetic Switch
•If a load is connected to the Inverter during running, an inrush current will actuate the overcurrent
protective circuit in the Inverter. Do not connect an electromagnetic switch or magnetic contactor
(MC) to the output circuit.
Install a Noise Filter on the Output Side
Connect a noise filter to the output side of the Inverter to reduce induction and radio noise.
Power
supply
Molded-case circuit breaker
(MCCB)
Design
Inverter
JX
Signal line
Induction noise: Electromagnetic induction can generate noise on the signal line, causing the
controller to malfunction.
Radio noise: Electromagnetic waves from the Inverter and I/O cables can cause the radio receiver
to generate noise.
Noise filter
3G3AX-NFO
Induction noise
Radio noise
AM radioController
Countermeasures Against Induction Noise
To reduce induction noise from the output side, the following method is also effective.
M
2-19
Page 44

2-2 Wiring
•Run the cables collectively through the mounted metal pipe. Keeping the metal pipe at least 30 cm
away from the signal line reduces induction noise.
2
Design
Power
supply
Molded-case circuit breaker
(MCCB)
Inverter
JX
M
30 cm min.
Signal line
Controller
Cable Length Between Inverter and Motor
Use a cable of 50 m or less between the Inverter and the motor. If the cable length is increased, the
stray capacitance between the Inverter outputs and the ground is increased proportionally. An
increase in stray capacitance causes high-frequency leakage current to increase, affecting the
current detector in the Inverter's output unit and peripheral devices. If your system configuration
requires a cable length of 50 m or more, perform the following:
•Wire in metallic ducts.
•Use separate cables for each phase to reduce cable capacitance.
•Set the Inverter to a lower carrier frequency (b083).
Do Not Use Single-phase Motors
•A single-phase motor uses the capacitor start method or split-phase start method to determine its
rotation direction at startup, and thus is not suitable for the variable speed control via the Inverter.
Do not use single-phase motors.
* If a capacitor start motor is used, the capacitor may be damaged by a sudden electric charge and
discharge caused by Inverter output. If a split-phase start motor is used, the startup coil may burn
because the centrifugal switch does not operate.
2-20
Page 45

Specifications of the Control Circuit Terminals
2-2 Wiring
Input signal
Monitor
signal
Frequency
reference
input
Terminal
symbol
PCS
1
2 Reverse/Stop
3 Fault reset
4
5
L Input signal common ⎯
AM
H Frequency reference power supply ⎯
O Voltage frequency reference signal ⎯
Terminal name and function Default setting Specifications
External power supply terminal for input
signal (input).......................At sink logic
Internal power supply output terminal for
input signal (output)......At source logic
Multi-function input terminals 1 to 5
Select 5 functions among the 31
functions and allocate them to from
terminals 1 to 5.
The terminal allocation is changed
automatically when the emergency
shutoff function is used. Refer to
"Emergency Shutoff Input Function"
(page 4-46).
Analog frequency monitor/
Analog output current monitor
Forward/Stop
Emergency stop
fault
Multi-step speed
reference 1
Analog
frequency
monitor
⎯
24 V DC ±10%
30 mA max.
24 V DC ±10%
100 mA max.
Contact input
Close: ON (Start)
Open: OFF (Stop)
Minimum ON time:
12 ms min.
10 V DC
10 mA max.
0 to 10 V DC
Input impedance 10 kΩ
When installing variable
resistors at FS, FV, and FC
(1 to 2 kΩ)
2
Design
Output signal
Relay output
signal
OI Current frequency reference signal ⎯
L Frequency reference common ⎯
Multi-function output terminal
11
CM2 Output signal common ⎯
AL2
AL1
AL0
Select the status of the Inverter and
allocate it to terminal P1.
AL1 AL2 AL0
Under normal operation : AL2-AL0 Closed
Under abnormal operation or power
shutdown : AL1-
(Default)
AL0 Open
Frequency
arrival signal at
a constant
speed
Contact ratings
250 V AC 2.0 A (resistance load) 100 V AC min.
30 V DC 3.0 A (resistance load) 5 V DC
4 to 20 mA DC
Input impedance 250 Ω
27 V DC
50 mA max.
0.2 A (inductive load) 10 mA
0.6 A (inductive load) 100 mA
2-21
Page 46

2-2 Wiring
Functions and Connections of the Control Circuit Terminals
2
Design
Terminal
function
Contact
input
(for
switching
function)
Power
supply
External
analog
frequency
reference
Terminal
symbol
Terminal name Function and connecting method Wire size
Select functions and allocate them to terminals 1 to 5.
1
2
3
4
Multi-function
input
(The figure below illustrates the wiring of the sink logic.)
5
P24 Internal 24 V DC 24 V DC output
L Input common Input signal common
If the multi-function input is set as the sink logic, the PCS
terminal acts as an external power supply input terminal.
If the multi-function input terminal is set as the source logic,
the PCS terminal acts as an internal power supply output
PCS
Input power
supply
terminal.
Frequency
H
reference power
supply output
• External voltage directive is 0 to 9.8 V.
(Nominal input: 10 V)
H OOI L
Frequency
O
OI
(Voltage
directive)
Frequency
reference Input
*4
(Current
Variable resistor
(1 or 2 W min.)
1 to 2 kΩ
H
reference Input
*3
directive)
Frequency
L
reference
common
4 to 19.6 mA DC
(Nominal input: 20 mA)
Input impedance 250 Ω
L 5 4 3 2 1
*1
O
OI
L
-
+
Input impedance 10 kΩ
H
0 to 9.8 V DC
(Nominal input: 10 V)
O
L
OI
+
-
Shield wire
of 0.14 to
0.75 mm
2
Recomme
nded wire
size:
0.75 mm
2
Monitor
output
Open
Collector
Output
Relay
output
AM
11
CM2
AL2
AL1
AL0
Multi-function
analog output
Multi-function
*2
output
Multi-function
output common
Relay output
Relay output
common
• Choose from frequency or output current.
Output terminal specifications
0 to 10 V DC full-scale
1 mA max.
CM2
11
RY
Output terminal specifications
Between each terminal and PC the
voltage drop is 4V max. at power-on
Open collector output
27 V DC max.
50 mA max.
Select the status of the Inverter and allocate it to terminal 11.
Selection of functions is the same as the multi-function
*5 *6
output.
AM
L
*1. Simultaneous input of current and voltage is not possible. Do not connect the signal lines simultaneously.
*2.
By factory default, multi-function output 11 is set to NO contact. To switch to NC contact, change the C031
setting.
*3. Do not input negative voltage. Doing so may result in damage to the inverter
2-22
Page 47

2-2 Wiring
*4. For the external analog input indicated above, use a shielded wire for connection and connect the shielded
part to terminal L for stable operation.
*5. Below are the contact specifications of the relay output.
Output
terminal
AL2-AL0
AL1-AL0
*6.
By factory default, the relay output (AL2, AL1) contact selection (C036) is set at NC contact between AL2-AL0, and
NO contact between AL1-AL0.
Contact
capacity
Max.
Min.
Max.
Min.
Resistance load Inductive load
250 V AC 2.5 A
30V DC 3 A
100 V AC 10 mA
5 V DC 100 mA
250 V AC 1 A
30 V DC 1 A
100 V AC 10 mA
5 V DC 100 mA
AL1
Inside the Inverter
(Factory default)
250 V AC 0.2 A
30 V DC 0.7 A
250 V AC 0.2 A
30 V DC 0.2 A
AL0
AL2
Mode Selector
RS-485 Communication/Operator Selector (S7)
Select the mode according to the option connected to the communications connector.
When using the 3G3AX-OP01 supplied with the Inverter, it is available regardless of the switch
condition.
2
Design
Symbol Name Status Description
S7
RS-485 communication/
operator selector
485 RS485 ModBus communication
OPE [Default] Digital Operator (Option: 3G3AX-OP1)
Emergency shutoff selector (S8)
Use this selector to enable the emergency shutoff input function.
Symbol Name Status Description
ON Emergency shutoff input enabled
OFF
[Default]
Normal
S8
Emergency
shutoff
selector
*1 The multi-function input terminal 3 is switched to a terminal for emergency shutoff input, and the allocation of
other multi-function input terminals is also changed automatically. Do not set to ON immoderately. For details,
refer to "Emergency Shutoff Input Function" (page 4-46).
*1
2-23
Page 48

2
Design
2-2 Wiring
Conforming to EC Directives
Conforming Standards
•EMC directive EN 61800-3
•Low-voltage directive EN 61800-5-1
Concept of Conformity
EMC Directive
OMRON products are the electrical devices incorporated and used in various machines or
manufacturing equipment. For this reason, we make efforts to conform our products to their related
EMC standards so that the machines or equipment which have incorporated our products should
easily conform to the EMC standards. The JX models have conformed to the EMC directive EN
61800-3 by following the installation and wiring method as shown below. Your machines or
equipment, however, vary in type, and in addition, EMC performance depends on the configuration,
wiring, or location of the devices or control panels which incorporate the EC directive conforming
products. This in turn does not allow us to confirm the condition and the conformity in which our
products are used. Therefore, we appreciate confirmation of the final EMC conformity for the whole
machine or equipment on your own.
Wiring the Power Supply
•Be sure to connect the power input terminals (R/L1, S/L2, and T/L3) and power supply via an EMC
conforming dedicated noise filter AX-FIJ for the none integrated filter models. The single phase
JX-AB-F and three-phase 400V JX-A4-F models have integrated filter complies to
EN61800-3 as shown below
Model EMC requirements LVD requirements Carriier freq Motor cable
single phase 200V EN61800-3 category C1
3-phase 400V EN61800-3 category C3
•Keep the ground cable as short as possible.
•Keep the cable between the Inverter and the noise filter as short as possible.
.
EN61800-5-1:2003 3KHz 5m (shielded)
Low-voltage Directive
The JX models have conformed to the EMC directive EN61800-5-1 by performing the machine installation and wiring as shown below.
•The JX models are an open type device. Be sure to install it inside the control panel.
•The power supply and voltage (SELV) with reinforced or double insulation should be used for
wiring to the control circuit terminals.
•To satisfy requirements of the LVD (low-voltage) directive, the Inverter must be protected with a
molded case circuit breaker (MCCB) in case a short-circuiting accident occurs. Be sure to install a
molded case circuit breaker (MCCB) on the power supply side of the Inverter.
•Use one molded case circuit breaker (MCCB) per Inverter.
•Use the crimp-type terminal with an insulation sleeve to connect to the main circuit terminals.
•When not using the braking resistor or braking resistor unit, connect the crimp-type terminal with
an insulation sleeve to the braking resistor connection terminals (P/+, N/-).
Important notes
2-24
•Input choke is required to comply with EMC directive from the harmonic distortion point of view
(IEC 61000-3-2 and 4).
•If the motor cable length exceeds 5m, use output choke to avoid unexpected problem due to the
leakage current from the motor cable.
Page 49

2-2 Wiring
•Integrated EMC filter contains Y-capacitors connected to earth. That means the leakage current
from the Y-capacitors may effect on the Earth Leakage Breaker (ELB) at input side. Please refer
to the following table to help selecting ELB. Note that the values are nominal ones only flow via the
capacitor. Leakage current from the motor cable and motor should also be considered when
selecting the ELB. Actual value may be different depending on your system.
Model
Earth leakage current @50Hz 200V [mA rms]
Neutral point earthed One phase earthed
JX-AB002~AB004-F 4.2 -
JX-AB007~AB022-F 8.3 -
Earth leakage current @50Hz 400V [mA rms]
Model
Neutral point earthed One phase earthed
JX-A4004~A4040-F 3.6 8.7
JX-A4055~A4075-F 35.7 80.4
The values are almost proportional to the input voltage.
•As user you must ensure that the HF (high frequency) impedance between adjustable frequency
inverter, filter, and ground is as small as possible.
•Ensure that the connections are metallic and have the largest possible contact areas (zincplated mounting plates).
•Avoid conductor loops that act like antennas, especially loops that encompass large areas.
•Avoid unnecessary conductor loops.
•Avoid parallel arrangement of low-level signal wiring and power-carrying or noise-prone
conductors.
•Use shielded wiring for the motor cable and all analog and digital control lines.
•Allow the effective shield area of these lines to remain as large as possible; i.e., do not strip
away the shield (screen) further away from the cable end than absolutely necessary.
•With integrated systems (for example, when the adjustable frequency inverter is
communicating with some type of supervisory controller or host computer in the same
control cabinet and they are connected at the same ground + PE-potential), connect the
shields of the control lines to ground + PE (protective earth) at both ends. With distributed
systems (for example the communicating supervisory controller or host computer is not in
the same control cabinet and there is a distance between the systems), we recommend
connecting the shield of the control lines only at the end connecting to the adjustable
frequency inverter. If possible, route the other end of the control lines directly to the cable
entry section of the supervisory controller or host computer. The shield conductor of the
motor cables always must connected to ground + PE at both ends.
•To achieve a large area contact between shield and ground + PE-potential, use a PG screw
with a metallic shell, or use a metallic mounting clip.
•Use only cable with braided, tinned copper mesh shield (type “CY”) with 85% coverage.
•The shielding continuity should not be broken at any point in the cable. If the use of reactors,
contactors, terminals, or safety switches in the motor output is necessary, the unshielded
section should be kept as short as possible.
•Some motors have a rubber gasket between terminal box and motor housing. Very often,
the terminal boxes, and particularly the threads for the metal PG screw connections, are
painted. Make sure there is always a good metallic connection between the shielding of the
motor cable, the metal PG screw connection, the terminal box, and the motor housing. If
necessary, carefully remove paint between conducting surfaces.
2
Design
2-25
Page 50

2
Design
2-2 Wiring
•Take measures to minimize interference that is frequently coupled in through installation cables.
•Separate interfering cables with 0.25 m minimum from cables susceptible to interference. A
particularly critical point is laying parallel cables over longer distances. If two cables
intersect (one crosses over the other), the interference is smallest if they intersect at an
angle of 90°. Cables susceptible to interference should therefore only intersect motor
cables, intermediate circuit cables, or the wiring of a rheostat at right angles and never be
laid parallel to them over longer distances.
•Minimize the distance between an interference source and an interference sink (interferencethreatened device), thereby decreasing the effect of the emitted interference on the interference
sink.
•You should use only interference-free devices and maintain a minimum distance of 0.25 m
from the adjustable frequency inverter.
•Follow safety measures in the filter installation.
•If using external EMC filter, ensure that the ground terminal (PE) of the filter is properly
connected to the ground terminal of the adjustable frequency inverter. An HF ground
connection via metal contact between the housings of the filter and the adjustable frequency
inverter, or solely via cable shield, is not permitted as a protective conductor connection.
The filter must be solidly and permanently connected with the ground potential so as to
preclude the danger of electric shock upon touching the filter if a fault occurs.
•To achieve a protective ground connection for the filter:
•Ground the filter with a conductor of at least 10 mm2 cross-sectional area.
•Connect a second grounding conductor, using a separate grounding terminal parallel to the
protective conductor. (The cross section of each single protective conductor terminal must
be sized for the required nominal load.)
2-26
Page 51

Chapter 3
Operation
3-1 Test Run Procedure ......................................... 3-3
3-2 Test Run Operation.......................................... 3-4
3-3 Part Names and Descriptions of the Digital
Operator ............................................................ 3-8
3-4 Operation Procedure (Example: Factory Default)
........................................................................... 3-10
3-5 Parameter Transition ....................................... 3-16
3-6 Parameter List .................................................. 3-17
Page 52

3Operation
WARNING
3
Operation
Operation and Adjustment
Do not remove the front cover during the power supply and 5 minutes after the power shutoff.
Doing so may result in a serious injury due to an electric shock.
Do not operate the Digital Operator or switches with wet hands. Doing so may result in a serious injury due to an
electric shock.
Inspection of the Inverter must be conducted after the power supply has been turned off. Not doing so may result
in a serious injury due to an electric shock.
The main power supply is not necessarily shut off even if the emergency shutoff function is activated.
Do not change wiring, mode change switches (S7, S8), optional devices or replace cooling fans while the input
power is being supplied.
Doing so may result in a serious injury due to an electric shock.
CAUTION
Do not touch the Inverter fins, braking resistors and the motor, which become too hot during the power supply
and for some time after the power shutoff. Doing so may result in a burn.
Take safety precautions such as setting up a molded-case circuit breaker (MCCB) that matches the Inverter
capacity on the power supply side. Not doing so might result in damage to property due to the short circuit of the
load.
Safety Information
•Be sure to confirm the permissible range of motors and machines before operation because the Inverter
speed can be changed easily from low to high.
•Provide a separate holding brake if necessary.
Precautions for Use
Error Retry Function
•Do not come close to the machine when using the error retry function because the machine may abruptly
start when stopped by an alarm.
•Be sure to confirm the RUN signal is turned off before resetting the alarm because the machine may
abruptly start.
Non-Stop Function at Momentary Power Interruption
•Do not come close to the machine when selecting restart in the non-stop function at momentary power
interruption selection (b050) because the machine may abruptly start after the power is turned on.
Operation Stop Command
•Provide a separate emergency stop switch because the STOP key on the Digital Operator is valid only when
function settings are performed.
•When checking a signal during the power supply and the voltage is erroneously applied to the control input
terminals, the motor may start abruptly. Be sure to confirm safety before checking a signal.
3-2
Page 53

3-1 Test Run Procedure
3-1 Test Run Procedure
Item Description Reference page
Installation and Mounting Install the Inverter according to the installation conditions. 2-2
•Make sure that the installation conditions are met.
Wiring and Connection Connect to the power supply and peripheral devices. 2-7
•Select peripheral devices that meet the specifications, and wire correctly.
Power On Check the following before turning on the power.
•Make sure that an appropriate power supply voltage is supplied and that the power input
terminals (R/L1, S/L2, and T/L3) are wired correctly.
JX-A2: 3-phase 200 to 240 V AC
JX-AB: 1/3-phase 200 to 240 V AC
(Connect to L1 and N/L3 for 1 phase)
JX-A4: 3-phase 380 to 480 V AC
•Make sure that the motor output terminals (U/T1, V/T2, and W/T3) are connected to the
motor correctly.
•Make sure that the control circuit terminals and the control device are wired correctly
and that all control terminals are turned off.
•Set the motor to no-load status (i.e., not connected to the mechanical system).
•After checking the above, turn on the power.
Display Status Check Make sure that there are no faults in the Inverter.
•When the power is turned on normally, the display shows:
RUN LED indicator : ON ALARM LED indicator : OFF
POWER LED indicator : ON RUN command LED indicator : ON
Volume LED indicator : ON Data LED indicator (frequency) : ON
Data display : Displays the set value in d001.
•If an error occurs, the error code is displayed on the data display. In this case, refer to
"Chapter 5 Maintenance Operations" and make the necessary changes to remedy.
3
Operation
Parameter Initialization Initialize the parameters.
•Set parameter No. b084 to "02", and press the key while holding down the and
keys simultaneously.
Parameter Settings Set the parameters required for a test run.
•Set the motor capacity selection (H003) and the motor pole number selection (H004).
No-load Operation Start the no-load motor via the Digital Operator.
•Use the FREQ adjuster on the Digital Operator to rotate the motor.
Actual Load Operation Connect the mechanical system and operate via the Digital Operator.
•If there is no problem with the no-load operation, connect the mechanical system to the
motor and operate via the Digital Operator.
Operation Refer to "Chapter 4 Functions", and set the necessary parameters.
3-3
Page 54

3-2 Test Run Operation
3-2 Test Run Operation
Power On
Checkpoints Before Turning On the Power
3
Operation
•Make sure that an appropriate power supply voltage is supplied and that the power input terminals
(R/L1, S/L2, and T/L3) are wired correctly.
JX-A2: 3-phase 200 to 240 V AC
JX-AB: 1-phase 200 to 240 V AC (Connect to L1 and N)
JX-A4: 3-phase 380 to 480 V AC
•Make sure that the motor output terminals (U/T1, V/T2, and W/T3) are connected to the motor
correctly.
•Make sure that the control circuit terminals and the control device are wired correctly and that all
control terminals are turned off.
•Set the motor to no-load status (i.e., not connected to the mechanical system).
Power On
•After checking the above, turn on the power.
Display Status Check
•When the power is turned on normally, the display shows:
[Normal] RUN LED indicator (during RUN) : ON ALARM LED indicator : OFF
POWER LED indicator : ON RUN command LED indicator : ON
Volume LED indicator : ON Data LED indicator (frequency) : ON
Data display : Displays the set value in d001
•If an error occurs, refer to "Chapter 5 Maintenance Operations" and make the necessary changes
to remedy.
[Fault] RUN LED indicator (during RUN) : ON ALARM LED indicator : ON
POWER LED indicator : ON RUN command LED indicator : ON
Volume LED indicator : ON Data LED indicator (frequency) : ON
Data display : An error code, such as "E-01", is displayed.
(The display varies depending on the type of error.)
3-4
Page 55

Parameter Initialization
•Initialize the parameters using the following procedure.
•To initialize the parameters, set parameter b084 to "02".
Key sequence Display example Description
0.0
3-2 Test Run Operation
Power On
3
b---
b001
b084
00
02
b084
Press the Mode key once, and then press the Decrement key three times to
display "b---".
Press the Mode key.
"b001" is displayed.
Use the Increment or Decrement key to display "b084".
Press the Mode key. The set value in "b084" is displayed.
Use the Increment or Decrement key to display "02".
Press the Enter key. The set value is entered and "b084" is displayed.
Operation
Press the STOP/RESET key while holding down the Mode and Decrement
keys simultaneously.
When the display blinks, release the STOP/RESET key first, and then the
Mode and Decrement keys.
Displays initialization.
=k.k0k0
(In 1 s) The parameter number is displayed again in approximately 1 s.
d001
3-5
Page 56

3-2 Test Run Operation
Setting the Motor Capacity Selection (H003) and Motor Pole Number Selection
(H004)
Parameter
3
Operation
Register
No.
H003 1165h
H004 1166h
Key sequence Display example Description
No.
Name Description Setting range
200-V class
0.2/0.4/0.75/
Motor capacity
selection
Motor pole
number
selection
Sets the capacity of the
motor connected to the
Inverter.
Sets the pole number of the
motor connected to the
Inverter.
Press the Mode key twice to display the mode selection.
1.5/2.2/3.7/
400-V class
0.4/0.75/1.5/
2.2/3.7/5.5/7.5
5.5/7.5
2/4/6/8 Pole 4 No
b---
Use the Increment or Decrement key to display "H---".
h---
Unit of
setting
kW
Default
setting
Varies with
the
capacity.
Change
during
RUN
No
Press the Mode key. "H003" is displayed.
h003
Press the Mode key. The set value in "H003" is displayed.
0.20
Use the Increment or Decrement key to set the rated motor capacity.
0.40
Press the Enter key. The set value is entered.
0.40
(In approx. 1 s) The parameter number is displayed again.
h003
3-6
Page 57

No-load Operation
•Start the no-load motor (i.e., not connected to the mechanical system) using the Digital Operator.
* Before operating the Digital Operator, check that the FREQ adjuster is set to "MIN."
* Make sure that the LED indicator above the FREQ adjuster and the RUN command LED indicator
are lit.
Forward/Reverse Rotation via the Digital Operator
Key sequence Display example Description
Press and hold the Mode key for 3 seconds or more to display "d001", and then
0.0
(Monitors the frequency reference.)
3-2 Test Run Operation
3
press again.
Operation
0.0
10.00
•By turning the FREQ adjuster, make sure that there is no vibration or abnormal sound from the
motor.
•Make sure that no errors have occurred in the Inverter during operation.
•Switch between forward and reverse with the operator rotation direction selection (F004).
Stopping the Motor
•After completing the no-load operation, press the STOP/RESET key. The motor will stop.
Actual Load Operation
•After checking the operation with the motor in the no-load status, connect the mechanical system
and operate with an actual load.
* Before operating the Digital Operator, check that the FREQ adjuster is set to "MIN."
Connecting the Mechanical System
•After confirming that the motor has stopped completely, connect the mechanical system.
•Be sure to tighten all the screws when fixing in the motor axis.
The motor starts rotating forward in accordance with the frequency reference.
The RUN command LED indicator is lit.
Press the RUN key.
Turn the FREQ adjuster slowly.
The monitor value of the frequency reference is displayed.
Operation via the Digital Operator
•Because a possible error may occur during operation, make sure that the STOP/RESET key on
the Digital Operator is easily accessible.
•Use the Digital Operator to operate the Inverter the same way as in no-load operation.
Checking the Operating Status
•After making sure that the operating direction is correct and that the Inverter is operating smoothly
at a slow speed, increase the frequency reference.
•By changing the frequency reference or the rotation direction, make sure that there is no vibration
or abnormal sound from the motor.
Make sure that the output current (output current monitor [d002]) is not excessive.
3-7
Page 58

3-3 Part Names and Descriptions of the Digital Operator
3-3 Part Names and Descriptions of the
Digital Operator
3
Operation
8888
Data display
RUN command LED indicator
Operation keys
Name Description
POWER LED indicator Lit when the power is supplied to the control circuit.
ALARM LED indicator Lit when an Inverter error occurs.
RUN (during RUN) LED
indicator
PROGRAM LED indicator
Data display
Data display LED indicator
FREQ adjuster
Lit when the Inverter is running.
Lit when the set value of each function is indicated on the data display.
Blinks during warning (when the set value is incorrect).
Displays relevant data, such as frequency reference, output current, and set
values.
Lit according to the indication on the data display.
Hz: Frequency A: Current
3-8
Volume LED indicator Lit when the frequency reference source is set to the FREQ adjuster.
FREQ adjuster
RUN command LED
indicator
RUN key
STOP/RESET key
Sets a frequency. Available only when the frequency reference source is set
to the FREQ adjuster. (Check that the Volume LED indicator is lit.)
Lit when the RUN command is set to the Digital Operator.
(The RUN key on the Digital Operator is available for operation.)
Activates the Inverter. Available only when operation via the Digital Operator
is selected.
(Check that the RUN command LED indicator is lit.)
Forward/Reverse rotation depends on “F004” setting
Decelerates and stops the Inverter. Functions as a reset key if an Inverter
error occurs.
Page 59

3-3 Part Names and Descriptions of the Digital Operator
Name Description
Switches between: the monitor mode (d), the basic function mode
(F), and the extended function mode (A, b, C,
H).
With this key, you can always change the display as follows.
[Supplemental information]
To jump to “d001” from any function mode, hold down the Mode key for 3
seconds.
Mode key
Enter key
Increment key
Decrement key
58.1
or
f001 f001
58.0
57.9
Note: Always press the Enter key to store any changed data.
(To change the set value, be sure to press the Enter key.)
Do not press the Enter key if you don’t want to store any changes, for example,
Enters and stores changed data.
if you have changed the data inadvertently.
Changes the mode.
Also, increases the set value of each function.
Changes the mode.
Also, decreases the set value of each function.
3
Operation
3-9
Page 60

3-4 Operation Procedure (Example: Factory Default)
3-4 Operation Procedure
(Example: Factory Default)
Displaying the Monitor Mode, Basic Function Mode, and Extended
3
Function Mode
Power On
1. The data of the set monitor is displayed. (Default is "0.0")
Operation
0.0
Press
2. The code of the monitor mode is displayed (as "d001").
•Press the Mode key once to return from the code
d001
Press Press
("d002" is displayed.)
display of the monitor mode to the monitor
display.
d002
Press Press
(Continued to the next page)
3-10
(13 times)(13 times)
Page 61

3-4 Operation Procedure (Example: Factory Default)
3. The code of the basic function mode is displayed (as "F001").
f001
Press Press
(4 times)(4 times)
4. The extended function mode is displayed (as "A---").
•Extended function mode
a---
Press Press
(4 times)(4 times)
5. The code of the monitor mode is displayed (as "d001").
Displays in order of A ⇔ b ⇔ C ⇔ H.
•Returns to step 2.
d001
3
Operation
3-11
Page 62

3-4 Operation Procedure (Example: Factory Default)
Setting Functions
•Switch the method of the RUN command. (Digital Operator → Control terminal block)
•To switch the method of the RUN command from the Digital Operator (factory default) to the control
terminal block, you need to change the frequency reference selection (A001) from the Digital
Operator (02) to the terminal (01).
1. Display the extended function mode (as "A---").
•To display "A---", follow the indication method
3
a---
Press
described in "Displaying the Monitor Mode, Basic
Function Mode, and Extended Function Mode"
(page 3-10).
•By default, the RUN command LED indicator will
light up as the RUN command selection is set to
the Digital Operator.
Operation
2. The code of the extended function mode is displayed (as "A001").
a001
Press
("A002" is displayed.)
a002
Press
3. The setting of the extended function mode is displayed (setting in "A002").
3-12
02
Press
(Continued to the next page)
•"02 (Digital Operator)" (default setting) is
displayed in the RUN command selection
(A002).
•The PROGRAM (PRG) LED indicator lights up
while the extended function mode setting is
displayed.
Page 63

(Change the A002 setting.)
01
Press
3-4 Operation Procedure (Example: Factory Default)
•Change the RUN command selection to the
terminal "01".
3
4. The code of the monitor mode is displayed (as "A002").
•Press the Enter key to fix the changed setting
a002
Press
(3 times)
5. The extended function mode is displayed (as "A---").
a---
data.
•The RUN command selection is changed to the
terminal, and the RUN command LED indicator
will go off.
•You can now change to another extended
function code.
•You can now move to another extended function
mode, the monitor mode, and the basic function
mode.
Operation
Setting Function Codes
•You can enter codes for the monitor mode, basic function mode, and extended function mode
directly, as well as through the scrolling method.
•Below is an example where code d001 of the monitor mode is changed to extended function A029.
1. Display the code of the monitor mode (as "d001").
d001
Press and simultaneously
(Continued to the next page)
3-13
Page 64

3-4 Operation Procedure (Example: Factory Default)
3
Operation
2. Change the function code.
•You can change the 4th digit when "d" blinks.
d001
Press
(2 times)
("A001" is displayed.)
•"A" blinks.
•Press the Enter key to fix the blinking digit.
a001
Press
("A" is entered.)
3. Change the 3rd digit of the function code.
•"0" of the 3rd digit blinks.
•Press the Enter key to fix "0" of the 3rd digit as
a001
Press
("0" is entered.)
4. Change the 2nd digit of the function code.
a001
you need not change it.
•Press the Mode key to start "A" blinking again.
•"0" of the 2nd digit blinks.
•Press the Mode key to start "0" of the 3rd digit
blinking again.
3-14
Press
(2 times)
(Continued to the next page)
Page 65

("A021" is displayed.)
a021
3-4 Operation Procedure (Example: Factory Default)
•"2" of the 2nd digit blinks.
Press
5. Change the 1st digit of the function code.
•"1" of the 1st digit blinks.
a021
Press or
(2 times)(8 times)
("A029" is displayed.)
•Press the Mode key to start "2" of the 2nd digit
blinking again.
•"9" of the 1st digit blinks.
a029
Press
("9" is entered.)
3
Operation
6. The function code selection is complete.
a029
"A029" selection completed.
(Supplemental Information)
•If you enter a parameter number that is not included in the parameter list, the display
returns to the parameter previously displayed.
•Press the Enter key to shift the digit to the right, and the Mode key to shift to the left.
•Press the Mode key to change the data for A029.
3-15
Page 66

3-5 Parameter Transition
3-5 Parameter Transition
*4
d001 0.0
*4
3
Operation
*4
d083
*4
f001
*5
f004
a---
b---
Press the key
*5
a001
*5
a002
a001
*3
*1
0000
*2
0001 9999
*1
0000
*2
c---
*5
h---
*1. Data is not stored by pressing the Mode key.
*2. Press the Enter key to store the data.
*3. When you press the Mode key after you return to the parameter number display without storing data in the
extended function mode, the mode selection function is selected.
*4. When you press the Enter key with d*** or F001 displayed, the monitor value is stored as the initial display
that appears when the power is turned on.
*5. When you press the Enter key, the first digit of each parameter setting is stored as the initial display that
appears when the power is turned on.
(Example: , etc.)
* To display a specific monitor when the power is turned on, press the Enter key with that monitor displayed. If a
parameter for an extended function code is stored after pressing the Enter key, however, that code (A---, b---,
C---, d---, or H---) appears at the next power-on. To prevent this, always press the Enter key again with the
desired monitor displayed after storing a parameter.
3-16
f002 a---
,
a003
0001 9999
Page 67

3-6 Parameter List
Monitor Mode (d)
3-6 Parameter List
Parm
No.
d001 Output frequency monitor 0.0 to 400.0 ⎯⎯Hz 1002 4-2
d002 Output current monitor 0.0 to 999.9 ⎯⎯A 1003 4-2
d003 Rotation direction monitor
d004
d005
d006
Output frequency monitor
d007
d013 Output voltage monitor 0. to 600. ⎯⎯V 100C 4-4
d016 Total RUN Time
d017 Power ON time monitor
d018 Fin temperature monitor 0.0 to 200.0 °C 116A 4-4
d080 Fault frequency monitor 0. to 9999. ⎯⎯⎯0011 4-4
d081 Fault monitor 1 (Latest)
d082 Fault monitor 2
d083 Fault monitor 3
d102 DC voltage monitor 0.0 to 999.9 ⎯⎯V 116C 4-5
d104 Electronic thermal monitor 0.0 to 100.0 ⎯⎯% 116D 4-5
Name
PID feedback value
monitor
(Enabled when the PID function is selected)
Multi-function input
monitor
Multi-function output
monitor
(after conversion)
(Output frequency × Conversion factor of b086)
Error code (condition of occurrence) →
Output frequency [Hz] → Output current [A] →
Internal DC voltage [V] → RUN time [h] →
Monitor or data range
(Digital Operator)
F: Forward
o: Stop
r: Reverse
0.00 to 99.99
100.0 to 999.9
1000. to 9999.
Example)
ON
OFF
5 4 3 2 1
ON
OFF
AL2 11
0.00 to 99.99
100.0 to 999.9
1000. to 9999.
1000 to 3996 (10000 to 39960)
0. to 9999.
1000 to 9999
⎡100 to ⎡999 (10000 to 99990 hours)
0. to 9999.
1000 to 9999
⎡100 to ⎡999 (10000 to 99990 hours)
ON time [h]
Terminal
4, 2: ON
Terminal
5, 3, 1: OFF
Example)
Terminal 11: ON
Terminal AL2: OFF
Default
setting
Change
during
Run
⎯⎯⎯1004 4-2
⎯⎯⎯
⎯⎯⎯1007 4-3
⎯⎯⎯1008 4-3
⎯⎯⎯
⎯⎯h
⎯⎯h
⎯⎯
Unit
Modbus
Address
(Hex)
1005 M
1006 L
1009 M
100A L
100E M
100F L
1010 M
1011 L
0012 to
001B
001C to
0025
0026 to
002F
Page
4-2
4-3
4-4
4-4
4-5
3
Operation
3-17
Page 68

3-6 Parameter List
Basic Function Mode (F)
Parm
No.
F001
F002 Acceleration time 1
3
F202
F003 Deceleration time 1
F203
Operation
F004
* 2nd control is displayed when SET(08) is allocated to one of the digital inputs.
Extended function mode
Parameter
Basic setting
Analog input
Name
Output frequency setting/
monitor
*2nd acceleration
time 1
*2nd deceleration
time 1
Operator rotation direction
selection
No.
A001
A201
A002
A202
A003 Base frequency 30. to Max. frequency [A004] 50
A203 *2nd base frequency 30. to Max. frequency [A204] 50 150C
A004 Maximum frequency
A204
A005 O/OI selection
A011 O start frequency 0.0 to Max. frequency 0.0 No Hz 1020 4-11
A012 O end frequency 0.0 to Max. frequency 0.0 No Hz 1022 4-11
A013 O start ratio 0. to 100. 0. No % 1023 4-11
A014 O end ratio 0. to 100. 100. No % 1024 4-11
A015 O start selection
A016 O, OI sampling 1. to 17. 8. No ⎯ 1026 4-12
Function name
Frequency reference
selection
*2nd frequency
reference selection
RUN command
selection
*2nd RUN command
selection
*2nd maximum
frequency
Starting frequency to 1st or 2nd max. frequency ⎯ Yes Hz - 4-6
02: Switches between O/FREQ adjuster via
03: Switches between FI/FREQ adjuster via
00: External start frequency (A011 set value)
Monitor or data range
(Digital Operator)
0.01 to 99.99
100.0 to 999.9
1000. to 3000.
0.01 to 99.99
100.0 to 999.9
1000. to 3000.
0.01 to 99.99
100.0 to 999.9
1000. to 3000.
0.01 to 99.99
100.0 to 999.9
1000. to 3000.
00: Forward
01: Reverse
Monitor or data range
(Digital Operator)
00: Digital Operator (FREQ adjuster)
01: Terminal
02: Digital Operator (F001)
03: ModBus communication
10: Frequency operation result
01: Terminal
02: Digital Operator
03: ModBus communication
30. to 400.
terminal AT
terminal AT
04: O input only
05: OI input only
01: 0 Hz
Default
setting
10.0 Yes s
10.0 Yes s
10.0 Yes s
10.0 Yes s
Default
setting
Change
during
Run
00 No ⎯ 1018 4-7
Change
during
Run
00 No ⎯ 1019 4-8
00 No ⎯ -4-8
02 No ⎯ 101A 4-8
02 No ⎯ -4-8
No Hz
50
50 150D
02 No ⎯ 101D 4-10
01 No ⎯ 1025 4-11
No Hz
Unit
Unit
Modbus
Address
(Hex)
1014 M
1015 L
1501 M
1502 L
1016 M
1017 L
1503 M
1504 L
Modbus
Address
(Hex)
101B
101C
Page
Page
4-6
4-6
4-6
4-6
4-9
4-10
3-18
Page 69

3-6 Parameter List
Parameter
No.
A020
A220
A021
A022
A023
A024
A025
A026
A027
A028
Multi-step speed, Jogging
A029
A030
A031
A032
A033
A034
A035
A038 Jogging frequency 0.00/Starting frequency to 9.99 6.00 Yes Hz 1048 4-14
A039
A041
A241
A042
A242
Charact. Torque boost
Function name
Multi-step speed
reference 0
*2nd multi-step
speed reference 0
Multi-step speed
reference 1
Multi-step speed
reference 2
Multi-step speed
reference 3
Multi-step speed
reference 4
Multi-step speed
reference 5
Multi-step speed
reference 6
Multi-step speed
reference 7
Multi-step speed
reference 8
Multi-step speed
reference 9
Multi-step speed
reference 10
Multi-step speed
reference 11
Multi-step speed
reference 12
Multi-step speed
reference 13
Multi-step speed
reference 14
Multi-step speed
reference 15
Jogging stop
selection
Torque boost
selection
*2nd torque boost
selection
Manual torque boost
voltage
*2nd manual torque
boost voltage
0.0/Starting frequency to Max. frequency 6.0 Yes Hz 1029 4-12
0.0/Starting frequency to 2nd max. frequency 6.0 Yes Hz 150F 4-12
0.0/Starting frequency to Max. frequency
Monitor or data range
(Digital Operator)
00: Free-run stop
01: Deceleration stop
02: DC injection braking stop
00: Manual torque boost only
01: Automatic (simple) torque boost
0.0 to 20.0
Default
setting
Change
during
Run
0.0
0.0 102D
0.0 102F
0.0 1031
0.0 1033
0.0 1035
0.0 1037
0.0 1039
0.0 103B
0.0 103D
0.0 103F
0.0 1041
0.0 1043
0.0 1045
0.0 1047
00 No ⎯ 1049 4-14
00
00 1510
5.0
0.0 1511
Yes Hz
No -
Yes %
Unit
Modbus
Address
(Hex)
102B
104A
104B
Page
3
Operation
4-12
4-15
4-15
3-19
Page 70

3-6 Parameter List
Parameter
3
Charact. Torque boost
Operation
DC injection braking
Upper/Lower limit, Jump
PID control
No.
A043
A243
A044
A244
A045 Output voltage gain
A245
A051
A052
A053
A054
A055
A056
A061 Frequency upper limit 0.0/Frequency lower limit to Max. frequency 0.0
A261
A062 Frequency lower limit 0.0/Starting frequency to Frequency upper limit 0.0
A262
A063 Jump frequency 1
A064
A065 Jump frequency 2 0.0 1060
A066
A067 Jump frequency 3 0.0 1063
A068
A071 PID selection
A072 PID P gain 0.2 to 5.0 1.0 Yes ⎯ 1069 4-22
A073 PID I gain 0.0 to 150.0 1.0 Yes s 106A 4-22
A074 PID D gain 0.00 to 100.0 0.0 Yes s 106B 4-22
A075 PID scale 0.01 to 99.99 1.00 No Time 106C 4-22
A076
Function name
Manual torque boost
frequency
*2nd manual torque
boost frequency
V/f characteristics
selection
*2nd V/f
characteristics
selection
*2nd output voltage
gain
DC injection braking
selection
DC injection braking
frequency
DC injection braking
delay time
DC injection braking
power
DC injection braking
time
DC injection braking
method selection
*2nd frequency upper
limit
*2nd frequency lower
limit
Jump frequency
width 1
Jump frequency
width 2
Jump frequency
width 3
PID feedback
selection
00: Constant torque characteristics (VC)
01: Reduced torque characteristics (VP 1.7th
06: Special reduced torque characteristics
0.0/Frequency lower limit to 2nd Max. frequency 0.0 1517
0.0/Starting frequency to 2nd frequency upper
Monitor or data range
(Digital Operator)
0.0 to 50.0
power)
(Special VP)
20. to 100.
00: Disabled
01: Enabled
02: Frequency control [A052 set value]
0.0 to 60.0 0.5 No Hz 1052 4-17
0.0 to 5.0 0.0 No s 1053 4-17
0. to 100. 50 No % 1054 4-17
0.0 to 60.0 0.5 No s 1055 4-17
00: Edge operation
01: Level operation
limit
Jump frequency: 0.0 to 400.0
Jump frequency width: 0.0 to 10.0
00: Disabled
01: Enabled
00: OI
02: RS485 communication
10: Operation function output
01: O
Default
setting
100.
100. 1514 4-15
Change
during
Run
2.5
Yes %
0.0 1512
00
No -
00 1513
Yes %
00 No ⎯ 1051 4-17
01 No ⎯ 1056 4-17
No Hz
0.0 1518
0.0
0.5 105E
0.5 1061
0.5 1064
00 No ⎯ 1068 4-22
00 No ⎯ 106D 4-22
No Hz
No Hz
Unit
Modbus
Address
(Hex)
104C
104D
104E
105A
105B
105D
Page
4-15
4-15
4-15
4-63
4-20
4-20
4-21
3-20
Page 71

3-6 Parameter List
Parameter
No.
A077 Reverse PID function
PID control
A078
A081 AVR selection
AVR
A082
A085 RUN mode selection
A086
A092 Acceleration time 2
A292
A093
A293
A094
A294
A095
A295
RUN mode, Acceleration/Deceleration functions
A096
A296
A097
A098
A101 OI start frequency 0.0 to 400.0 0.0 No Hz 1080
A102 OI end frequency 0.0 to 400.0 0.0 No Hz 1082
A103 OI start ratio 0. to 100. 0. No % 1083
A104 OI end ratio 0. to 100. 100. No % 1084
External frequency adjust
A105 OI start selection
Function name
PID output limit
function
AVR voltage
selection
Energy-saving
response/accuracy
adjustment
*2nd acceleration
time 2
Deceleration
time 2
*2nd deceleration
time 2
2-step
accel/decel selection
*2nd 2-step
accel/decel selection
2-step acceleration
frequency
*2nd 2-step
acceleration
frequency
2-step deceleration
frequency
*2nd 2-step
deceleration
frequency
Acceleration pattern
selection
Deceleration pattern
selection
00: OFF (Deviation = Target value - Feedback
01: ON (Deviation = Feedback value - Target
00: Switched via multi-function input 09 (2CH)
Monitor or data range
(Digital Operator)
value)
value)
0.0 to 100.0 0.0 No % 106F 4-22
00: Always ON
01: Always OFF
02: OFF during deceleration
200-V class: 200/215/220/230/240
400-V class: 380/400/415/440/460/480
00: Normal operation
01: Energy-saving operation
0 to 100 50 No % 1073 4-26
0.01 to 99.99
100.0 to 999.9
1000. to 3000.
0.01 to 99.99
100.0 to 999.9
1000. to 3000.
01: Switched by setting
0.0 to 400.0
0.0 to 400.0
00: Line
01: S-shape curve
00: Line
01: S-shape curve
00: Use OI start frequency [A101]
01: 0 Hz start
Default
setting
200/400 No V 1071 4-26
15.00
15.00
15.00
15.00
Change
during
Run
00 No ⎯ 106E 4-22
02 No ⎯ 1070 4-26
00 No - 1072 4-26
Yes s
Yes s
00
00 151D
0.0
0.0 151F
0.0
0.0 1521
00 No ⎯ 107D 4-28
00 No ⎯ 107E 4-28
01 No ⎯ 1085
Unit
No ⎯
No Hz
No Hz
Modbus
Address
(Hex)
1074 M
1075 L
1519 M
151A L
1076 M
1077 L
151B M
151C L
1078
107A
107C
Page
3
Operation
4-27
4-27
4-27
4-27
4-27
4-11
4-28
4-11
4-28
4-11
4-28
4-11
4-28
4-11
4-28
3-21
Page 72

3-6 Parameter List
Parameter
3
Operation frequency
Frequency addition
Operation
VR adjustment
Restart during momentary power interruption
No.
A141
A142
A143 Operator selection
A145
A146
A151 VR start frequency 0.0 to 400.0 0.0 No Hz 1095 4-11
A152 VR end frequency 0.0 to 400.0 0.0 No Hz 1097 4-11
A153 VR start ratio 0. to 100. 0. No % 1098 4-11
A154 VR end ratio 0. to 100. 100. No % 1099 4-11
A155 VR start selection
b001 Retry selection
b002
b003 Retry wait time 0.3 to 100.0 1.0 No s 10A7
b004
b005
b011
b012
Function name
Operation frequency
input A setting
Operation frequency
input B setting
Frequency addition
amount
Frequency addition
direction
Allowable momentary
power interruption
time
Momentary power
interruption/
undervoltage trip
during stop selection
Momentary power
interruption retry time
selection
Starting frequency at
Active Frequency
Matching restart
Electronic thermal
level
00: Adds A145 value to output frequency
01: Subtract A145 value from output frequency
03: Trip after frequency matching deceleration
Monitor or data range
(Digital Operator)
00: Digital Operator (F001)
01: Digital Operator (FREQ adjuster)
02: Input O
03: Input OI
04: RS485 communication
00: Addition (A + B)
01: Subtraction (A - B)
02: Multiplication (A × B)
0.0 to 400.0 0.0 Yes Hz 1091 4-29
00: Use VR start frequency [A151]
01: 0 Hz start
00: Alarm
01: 0 Hz start
02: Frequency matching start
stop
0.3 to 25.0 1.0 No s 10A6 4-30
00: Disabled
01: Enabled
00: 16 times
01: No limit
00: Frequency at interruption
01: Max. frequency
02: Set frequency
Default
setting
Rated
current
Change
during
Run
01 No ⎯ 108E 4-29
02 No ⎯ 108F 4-29
00 No ⎯ 1090 4-29
00 No ⎯ 1093 4-29
01 No ⎯ 109A 4-11
00 No ⎯ 10A5 4-30
00 No ⎯ 10A8 4-30
00 No ⎯ 10A9 4-30
00 No ⎯ 1170 4-30
Unit
Modbus
Address
(Hex)
10AD
Page
4-30
4-41
Electronic thermal
3-22
b212
*2nd electronic
thermal level
0.2 × Rated current to 1.0 × Rated current
Rated
current
No A
4-32
1527
Page 73

3-6 Parameter List
Parameter
No.
b013
b213
Electronic thermal
b021
b221
b022 Overload limit level
b222
b023
Overload limit
b223
b028
b228
b029
b030
Active Freq Match
b031 Soft lock selection
Lock
b050
b051
Function name
Electronic thermal
characteristics
selection
*2nd electronic
thermal
characteristics
selection
Overload limit
selection
*2nd overload limit
selection
*2nd overload limit
Overload limit
parameter
*2nd overload limit
parameter
Overload limit source
selection
*2nd overload limit
source selection
Deceleration rate
constant at Active
Frequency Matching
restart
Active Frequency
Matching restart level
Selection of non-stop
function at
momentary power
interruption
Starting voltage of
non-stop function at
momentary power
interruption
level
Monitor or data range
(Digital Operator)
00: Reduced torque characteristics 1
01: Constant torque characteristics
02: Reduced torque characteristics 2
00: Disabled
01: Enabled in acceleration/constant speed
operation
02: Enabled in constant speed operation
0..1 × Rated current to 1.5 × Rated current
0.1 to 3000.0
00: b022, b222 set values
01: Input terminal O
0.1 to 3000.0 0.5 No s 1171 4-30
0.2 × Rated current to 2.0 × Rated current
00: Data other than b031 cannot be changed
when terminal SFT is ON.
01: Data other than b031 and the specified
frequency parameter cannot be changed when
terminal SFT is ON.
02: Data other than b031 cannot be changed.
03: Data other than b031 and the specified
frequency parameter cannot be changed.
10: Data other than parameters changeable
during operation cannot be changed.
00: Disabled
01: Enabled (Stop)
02: Enabled (Restart)
0.0 to 1000. 0.0 No V 10CA 4-36
Default
setting
1.5 ×
Rated
current
1.5 ×
Rated
current
Rated
current
Change
during
Run
00
No ⎯
00 1528
01
No ⎯
01 1529
No A
1.0
No s
1.0 152B
00
No ⎯
00 152C
No A 1172 4-30
01 No ⎯ 10BC 4-35
00 No 10C9 4-36
Unit
Modbus
Address
(Hex)
10AE
10B5
10B6
152A
10B7
10BB
Page
4-32
3
4-33
Operation
4-33
4-33
4-33
Non-stop at momentary power interruption
b052
Stop deceleration
level of non-stop
function at
momentary power
interruption
0.0 to 1000. 0.0 No V 10CB 4-36
3-23
Page 74

3-6 Parameter List
Parameter
3
Non-stop at momentary power interruption
Operation
Others
Initialization
Others
No.
b053
b054
b055
b056
b080 AM adjustment
b082 Starting frequency 0.5 to 9.9 1.5 No Hz 10D1 4-39
b083 Carrier frequency 2.0 to 12.0 3.0 No kHz 10D2
b084 Initialization selection
b085
b086
b087 STOP key selection
b088
b089
b091 Stop selection
b092 Cooling fan control
b130
Function name
Deceleration time of
non-stop function at
momentary power
interruption
Deceleration starting
width of non-stop
function at
momentary power
interruption
Overvoltage
protection
proportional gain
during deceleration
Overvoltage
protection integral
time during
deceleration
(Shared with C086 for AM offset adjustment)
02: Clears the trip monitor and initializes data
Initialization
parameter selection
Frequency
conversion
coefficient
Free-run stop
selection
Monitor display
selection
Overvoltage LAD
stop function
Monitor or data range
(Digital Operator)
0.01 to 99.99
100.0 to 999.9
1000 to 3000
0.0 to 10.0 0.0 No Hz 10CE 4-36
0.2 to 5.0 0.2 Yes ⎯ 1173 4-37
0.0 to 150.0 0.2 Yes s 1174 4-37
0. to 255.
00: Clears the trip monitor
01: Initializes data
00
* Do not change.
0.1 to 99.9 1.0 Yes ⎯ 10D5 4-41
00: Enabled
01: Disabled
00: 0 Hz start
01: Active Frequency Matching restart
01: Output frequency monitor
02: Output current monitor
03: Rotation direction monitor
04: PID feedback value monitor
05: Multi-function input monitor
06: Multi-function output monitor
07: Frequency conversion monitor
00: Deceleration → Stop
01: Free-run stop
00: Always ON
01: ON during RUN
02: Depends on the fin temperature
00: Disabled
01: Enabled
Default
setting
100. Yes ⎯ 10CF
Change
during
Run
1.0 No s 10CC 4-36
00 No ⎯ 10D3 4-41
00 No ⎯ 10D4 4-41
00 No ⎯ 10D6 4-41
00 No ⎯ 10D7 4-41
01 Yes ⎯ 10D8 4-42
00 No ⎯ 10DA 4-41
01 No ⎯ 10DB 4-43
00 No ⎯ 10F5 4-38
Unit
Modbus
Address
(Hex)
Page
4-39
4-62
4-40
4-63
3-24
Page 75

3-6 Parameter List
Parameter
No.
b131
b133
b134
Others
b140
b150
b151
C001
C201
C002
C202
C003
C203
Multi-function input terminals
C004
C204
C005
C205
Function name
Overvoltage LAD
stop function level
setting
Overvoltage
protection function
selection during
deceleration
Overvoltage
protection level
setting during
deceleration
Overcurrent
suppression function
Automatic carrier
reduction
Ready function
selection
Multi-function input 1
selection
*2nd multi-function
input 1 selection
Multi-function input 2
selection
*2nd multi-function
input 2 selection
Multi-function input 3
selection
*2nd multi-function
input 3 selection
Multi-function input 4
selection
*2nd multi-function
input 4 selection
Multi-function input 5
selection
*2nd multi-function
input 5 selection
Monitor or data range
(Digital Operator)
200-V class: 330. to 395.
400-V class: 660. to 790.
00: Disabled
01: Enabled
200-V class: 330. to 395.
400-V class: 660. to 790.
00: Disabled
01: Enabled
00: Disabled
01: Enabled
00: Disabled
01: Enabled
00: FW (forward)
01: RV (reverse)
02: CF1 (multi-step speed setting binary 1)
03: CF2 (multi-step speed setting binary 2)
04: CF3 (multi-step speed setting binary 3)
05: CF4 (multi-step speed setting binary 4)
06: JG (jogging)
07: DB (external DC injection braking)
08: SET (2nd control)
09: 2CH (2-step acceleration/deceleration)
11: FRS (free-run stop)
12: EXT (external trip)
13: USP (USP function)
15: SFT (soft lock)
16: AT (analog input switching)
18: RS (reset)
19: PTC (thermistor input)
20: STA (3-wire start)
21: STP (3-wire stop)
22: F/R (3-wire forward/reverse)
23: PID (PID enabled/disabled)
24: PIDC (PID integral reset)
27: UP (UP/DWN function accelerated)
28: DWN (UP/DWN function decelerated)
29: UDC (UP/DWN function data clear)
31: OPE (forced operator)
50: ADD (frequency addition)
51: F-TM (forced terminal block)
52: RDY (ready function)
53: SP-SET (special 2nd function)
64: EMR (emergency shutoff
255: No function
*1. The EMR is set forcibly with switch S8, not
with parameters.
*1
)
Default
setting
380/760 Yes V 10F6 4-38
380/760 No V 1177 4-37
Change
during
Run
00 No ⎯ 1176 4-37
01 No ⎯ 10F7 4-43
00 No ⎯ 10F8 4-43
00 No ⎯ 10F9 4-43
00
00 1532
01 1104
01 1533
18 1105
No ⎯
18 1534
12 1106
12 1535
02 1107
02 1536
Unit
Modbus
Address
(Hex)
1103
Page
4-44
3
Operation
3-25
Page 76

3-6 Parameter List
Parameter
3
Multi-function input terminals
Operation
No.
C011
C012
C013
C014
C015
C021
C026
Function name
Multi-function input 1
operation selection
Multi-function input 2
operation selection
Multi-function input 3
operation selection
Multi-function input 4
operation selection
Multi-function input 5
operation selection
Multi-function output
terminal 11 selection
Relay output (AL2,
AL1) function
selection
Monitor or data range
(Digital Operator)
00: NO
01: NC
00: RUN (signal during RUN)
01: FA1 (constant speed arrival signal)
02: FA2 (over set frequency arrival signal)
03: OL (overload warning)
04: OD (excessive PID deviation)
05: AL (alarm output)
06: Dc (disconnection detection)
07: FBV (PID FB status output)
08: NDc (network error)
09: LOG(logic operation output)
10: ODc (Do not use.)
43: LOC (light load detection signal)
Default
setting
Change
during
Run
00
00 110C
00 110D
00 110E
00 110F
00
05 1119
Unit
No ⎯
No ⎯
Modbus
Address
(Hex)
110B
1114
Page
4-44
4-55
C028 AM selection
Multi-function output
C031
Multi-function output setting
C036
C038
C039
C041
C241
C042
C043
C044
Level output status setting
C052 PID FB upper limit
C053 PID FB lower limit 0.0 112F
terminal 11 contact
selection
Relay output (AL2,
AL1) contact
selection
Light load signal
output mode
Light load detection
level
Overload warning
level
*2nd overload
warning level
Arrival frequency
during acceleration
Arrival frequency
during deceleration
PID deviation
excessive level
00: NO contact at AL2; NC contact at AL1
01: NC contact at AL2; NO contact at AL1
00: Enabled during acceleration/deceleration/
01: Enabled only during constant speed
0.0 to 2.0 × Rated current (0.0 setting: Function
0.1 × Rated current to 2.0 × Rated current
00: Output frequency
01: Output current
constant speed
disable)
0.0: Does not operate
0.0 to 400.0 0.0 No Hz 1126 4-56
0.0 to 400.0 0.0 No Hz 1128 4-56
0.0 to 100.0 3.0 No % 1129 4-22
0.0 to 100.0
00 No ⎯ 111B 4-62
00
No ⎯
01 1122
01 No ⎯ 1178 4-60
Rated
current
Rated
current
Rated
current
100
No ⎯ 1179 4-60
No A
No %
111D
1124
153A
112E
4-61
4-33
4-22
3-26
Page 77

3-6 Parameter List
Parameter
No.
C070
C072
C074
C075
C076
Communication function adjustment
C077
C078
C081 O adjustment 0.0 to 200.0 100.0 Yes % 1141 4-11
Function name
Operator/ModBus
selection
Communication
speed selection
(Baud rate selection)
Communication
station No. selection
Communication
parity selection
Communication stop
bit selection
Communication error
selection
Communication error
timeout
Communication wait
time
Monitor or data range
(Digital Operator)
02: Digital Operator
03: ModBus
04: 4800 bps
05: 9600 bps
06: 19200 bps
1. to 32. 1. No ⎯ 1139
00: No parity
01: Even
02: Odd
1: 1-bit
2: 2-bit
00: Trip
01: Trip after deceleration stop
02: Ignore
03: Free run
04: Deceleration stop
0.00 to 99.99 0.00 No s 113E
0. to 1000. 0. No ms 113F
Default
setting
Change
during
Run
02 No ⎯ 1137
04 No ⎯ 1138
00 No ⎯ 113B
1No⎯ 113C
02 No ⎯ 113D
Unit
Modbus
Address
(Hex)
Page
4-66C071
3
Operation
4-66
C082 OI adjustment 0.0 to 200.0 100.0 Yes % 1142 4-11
Various adjustment
C086 AM offset adjustment 0.0 to 10.0 0.0 Yes V 1145 4-62
C091 Not used
C101 UP/DWN selection
C102 Reset selection
C141
Others
C142
C143
C144
Logic operation
function A input
Logic operation
function B input
Logic operator
selection
Output terminal 11
ON delay
Use "00".
*Do not change.
00: Do not store the frequency data
01: Store the frequency data
00: Trip reset at rising edge of RS input
01: Trip reset at falling edge of RS input
02: Enabled only during trip (Reset at rising
edge of RS input)
00: RUN (signal during RUN)
01: FA1 (constant speed arrival signal)
02: FA2 (over set frequency arrival signal)
03: OL (overload warning)
04: OD (excessive PID deviation)
05: AL (alarm output)
06: Dc (disconnection detected)
07: FBV (PID FB status output)
08: NDc (network error)
10: ODc (
43: LOC (light load detection signal)
Do not use.
00: AND
01: OR
02: XOR
0.0 to 100.0 0.0 No s 1153 4-60
)
00 ⎯⎯ ⎯
00 No ⎯ 1149 4-53
00 No ⎯ 114A 4-51
00 No ⎯ 1150 4-59
01 No ⎯ 1151 4-59
00 No ⎯ 1152 4-59
3-27
Page 78

3-6 Parameter List
Parameter
Others
3
Operation
Control parameter
No.
C145
C148
C149
H003
H203
H004
H204
H006
H206
Function name
Output terminal 11
OFF delay
Relay output ON
delay
Relay output OFF
delay
Motor capacity
selection
*2nd motor capacity
selection
Motor pole number
selection
*2nd motor pole
number selection
Stabilization
parameter
*2nd stabilization
parameter
Monitor or data range
(Digital Operator)
0.0 to 100.0 0.0 No s 1154 4-60
0.0 to 100.0 0.0 No s 1157 4-60
0.0 to 100.0 0.0 No s 1158 4-60
200-V class
0.2/0.4/0.75/1.5/2.2/3.7/5.5/7.5
400-V class
0.4/0.75/1.5/2.2/3.7/5.5/7.5
2
4
6
8
0. to 255.
Default
setting
Factory
default
Factory
default
Change
during
Run
No kW
4
No Pole
4 1542
100 Yes % 1168
100 Yes % 1544
Unit
Modbus
Address
Page
(Hex)
1165
4-63
1541
1166
4-63
4-63
3-28
Page 79

Chapter 4
Functions
4-1 Monitor Mode.................................................... 4-2
4-2 Function Mode.................................................. 4-6
Page 80

4
Functions
4-1 Monitor Mode
4Functions
4-1 Monitor Mode
Output Frequency Monitor [d001]
Displays the output frequency of the Inverter.
The monitor LED indicator "Hz" lights up while d001 is displayed.
(Display)
0.0 to 400.0: Displays in increments of 0.1 Hz.
Output Current Monitor [d002]
Displays the output current value of the Inverter.
The monitor LED indicator "A" lights up while d002 is displayed.
(Display)
0.0 to 999.9: Displays in increments of 0.1 A.
Rotation Direction Monitor [d003]
Displays whether the Inverter output is in forward/reverse/stop status. The RUN LED indicator lights
up during forward/reverse rotation.
(Display)
F: Forward
o: Stop
r: Reverse
PID Feedback Value Monitor [d004]
Displays a feedback value converted by [A075] (PID scale) when the PID selection is enabled
([A071] = 01).
"Monitor display" = "PID feedback value (%)" × "PID scale"
(Setting)
A071: 01 (PID enabled)
A075: 0.01 to 99.99 (Can be set in increments of 0.01.)
(Display)
0.00 to 99.99 : Displays in increments of 0.01.
100.0 to 999.9 : Displays in increments of 0.1.
1000 to 9999 : Displays in increments of 1.
[A075]
4-2
Page 81

Multi-function Input Monitor [d005]
Displays the input status of the multi-function input terminals.
C011 to C015 (contact selection) are excluded so only physical status will be displayed disregarding
of the normally open or normally close selectiong.
(Example) Multi-function input terminals 4, 2 : ON
Multi-function input terminals 5, 3, 1 : OFF
ON
OFF
4-1 Monitor Mode
Display
: ON
: OFF
12345
(OFF) (ON) (OFF) (ON)(OFF)
Multi-function input monitor
Multi-function Output Monitor [d006]
Displays the output status of the multi-function output terminals and relay output terminals.
C031 and C036 (contact selection) are excluded so this monitor indicates the signal status of the
functions (C021 and C026) allocated to each multi-function output terminal disregarding the normally open or close selection.
(Example) Multi-function output terminal 11 : ON
Relay output terminal AL2 : OFF
Display
ON
OFF
11AL2
(OFF) (ON)
Multi-function output monitor
: ON
: OFF
Output Frequency Monitor (After Conversion) [d007]
4
Functions
Displays a conversion value obtained by multiplying the Inverter output frequency by the coefficient
set in [b086].
Displayed value = "Output frequency [d001]" × "Frequency conversion coefficient [b086]"
(Display) [d007]
0.00 to 99.99 : Displays in increments of 0.01.
100.0 to 999.9 : Displays in increments of 0.1.
1000. to 9999. : Displays in increments of 1.
1000 to 3996 : Displays in increments of 10.
(Setting range) [b086] 0.1 to 99.9: Can be set in increments of 0.1.
(Example)
When the output frequency [d001] = 50.0 Hz, and
the frequency conversion coefficient [b086] = 1.1,
the monitor [d007] displays "55.0" through 50.0 × 1.1 = 55.0.
4-3
Page 82

4-1 Monitor Mode
Output Voltage Monitor [d013]
Displays the output voltage value (Vac) of the Inverter.
The monitor LED indicator "V" lights up.
(Display)
0. to 600.: Displays in increments of 1 V.
Total RUN Time [d016]
Displays the Inverter RUN time.
4
(Display)
0. to 9999. : Displays in increments of 1 hour.
1000 to 9999 : Displays in increments of 10 hours.
⎡100 to ⎡999 : Displays in increments of 1000 hours.
Power ON Time Monitor [d017]
Functions
Displays the total power supply time of the Inverter.
(Display)
0. to 9999. : Displays in increments of 1 hour.
1000 to 9999 : Displays in increments of 10 hours.
⎡100 to ⎡999 : Displays in increments of 1000 hours.
Fin Temperature Monitor [d018]
Displays the fin temperature.
(Display)
0. to 200. : Displays in increments of 1 °C.
Fault Frequency Monitor [d080]
Displays the number of times the Inverter has tripped.
(Display)
0. to 9999. : Displays in increments of 1 time.
1000 to 6553 : Displays in increments of 10 times.
4-4
Page 83

Fault Monitors 1[d081], 2[d082], 3[d083]
Displays the details of the last three trips.
The most recent trip is displayed on trip monitor 1.
4-1 Monitor Mode
(Display)
•Factor (E01 to E60)
•Output frequency at the time of tripping (Hz)
•Output current at the time of tripping (A)
•Internal DC voltage at the time of tripping (V)
•Total RUN time before the trip (hr)
•Total power supply time before the trip (hr)
*1. Refer to "Error Code List" (page 5-2) and "Trip Monitor Display" (page 5-5).
(Trip Monitor Display Sequence)
(1)Trip factor
*1
*2
(2)Trip frequency (3)Trip current (4)Trip P-N voltage (5)Total RUN time (6)Power ON time
d081 e 07 60.0 4.0 398. 15. 18.
*2. Displays if there has been no trip.
_k_k_k_
4
Functions
DC Voltage Monitor [d102]
Displays the main circuit DC voltage of the Inverter.
(Display)
0.0 to 999.9 : Displays in increments of 0.1 V.
Electronic Thermal Monitor [d104]
Displays the count integration value of the electronic thermal. An overload trip occurs if it reaches
100% (E05).
(Display)
0.0 to 100.0 : Displays in increments of 0.1%.
4-5
Page 84

4
Functions
4-2 Function Mode
4-2 Function Mode
<Group F: Basic Function Parameter>
Output Frequency Setting/Monitor
•Set the Inverter output frequency.
•With the frequency reference set to the Digital Operator ([A001] = 02), you can set the output
frequency in F001. For other methods, refer to the [A001] section in "Frequency Reference
Selection" (page 4-8).
•If a frequency is set in [F001], the same value is automatically set in multi-step speed reference 0
[A020]. To set the 2nd speed reference, use [A220], or use [F001] with the SET terminal turned on.
To set by using the SET terminal, allocate 08 (SET) to the desired multi-function input.
Parameter No. Function name Data Default setting Unit
F001
*
A220
Output frequency
setting/monitor
Multi-step speed
reference 0
2nd multi-step
speed reference 0
0.0/Starting frequency to Max.
frequency
6.0 HzA020
Related parameters A001, A201, C001 to C005
* To switch to the 2nd multi-step speed, allocate 08 (SET) to the multi-function input terminal and then turn it on.
Acceleration/Deceleration Time
Set an acceleration/deceleration time for the motor. For a slow transition, set a large value, and for
a fast transition, set a small one.
Parameter No. Function name Data Default setting Unit
F002 Acceleration time 1
*
F202 2nd acceleration time 1
F003 Deceleration time 1
*
F203 2nd deceleration time 1
Related parameters A004, A204, C001 to C005
* To switch to 2nd acceleration/deceleration time 1, allocate 08 (SET) to the multi-function input terminal and then
turn it on.
0.01 to 3000 10.0 s
4-6
Page 85

4-2 Function Mode
•The set time here indicates the acceleration/deceleration time between 0 Hz and the maximum
frequency.
Output frequency
Max. frequency
A004/A204
Output frequency set value
Actual
acceleration
time
F002/F202
Actual
deceleration
time
F003/F203
Even if a short acceleration/deceleration time is set, the actual time cannot be shorter than the
minimum acceleration/deceleration time that is determined by the mechanical inertia moment and
the motor torque. If you set a time shorter than the minimum time, an overcurrent/overvoltage trip
may occur.
Acceleration Time TS
(
T
=
S
9.55
Deceleration Time T
(
T
=
B
9.55
NJJ
+)×
×
+)×
×
MML
()
TT
–
LS
NJJ
MML
()
TT
+
LB
J
L :Inertia moment of the load converted to the motor shaft [kg·m
J
M :Inertia moment of the motor [kg·m
M :Motor rotation speed [r/min]
N
S :Max. acceleration torque with the Inverter driving [N·m]
T
T
B
B :Max. deceleration torque with the Inverter driving [N·m]
T
L :Required driving torque [N·m]
Digital Operator Rotation Direction Selection
4
Functions
2
]
2
]
Select the direction of motor rotation applied to the RUN command via the Digital Operator.
This is disabled at terminals.
Parameter No. Function name Data Default setting Unit
F004
Operator rotation
direction selection
00: Forward
01: Reverse
00 ⎯
4-7
Page 86

4-2 Function Mode
<Group A: Standard Function Parameter>
Frequency Reference Selection
Select the method of the frequency reference.
Parameter No. Function name Data Default setting Unit
4
Functions
A001
*
A201
Related parameters A005, A141 to A143, A145, A146
* To switch to the 2nd frequency reference, allocate 08 (SET) to the multi-function input terminal and then turn it
on.
Frequency reference
selection
2nd frequency
reference selection
Data Frequency reference source
00 FREQ adjuster
01 Voltage or current setpoint reference from the terminal.
02 F001 value set via the Digital Operator.
03 ModBus communication
10 Result of the frequency operation function
00: Digital Operator (FREQ adjuster)
01: Terminal
02: Digital Operator (F001)
03: ModBus communication
10: Frequency operation result
00 ⎯
RUN Command Selection
Select the method of the RUN/STOP command.
Parameter No. Function name Data Default setting Unit
A002
*
A202
Related parameters F004, A005, C001 to C005
* To switch to the 2nd RUN command, allocate 08 (SET) to the multi-function input terminal and then turn it on.
Data RUN command source
RUN command
selection
2nd RUN command
selection
Turn ON/OFF by FW and RV allocated to the terminal.
01
02 Use the RUN and STOP/RESET keys on the Digital Operator.
03 Use the ModBus communication.
The STOP command is activated if both Forward/Reverse commands are input
simultaneously.
01: Terminal
02: Digital Operator
03: ModBus communication
02 ⎯
4-8
Page 87

4-2 Function Mode
A
Base Frequency
Base Frequency and Motor Voltage
Match the Inverter output (frequency/voltage) to the motor rating. Be careful, especially if you set a
base frequency at below 50 Hz. Otherwise, the motor may burn out.
Parameter No. Function name Data Default setting Unit
A003 Base frequency 30 to max. frequency [A004]
*
A203
2nd base
frequency
30 to max. frequency [A204]
50.0 Hz
Related parameters A004, A204, A081, A082
* To switch to the 2nd base frequency, allocate 08 (SET) to the multi-function input terminal and then turn it on.
Output voltage
VR voltage
selection
(A082)
Base frequency
(A003/A203)
Output
frequency (Hz)
•ISelect the motor voltage according to the motor specifications. If the voltage exceeds the specified
level, the motor may burn out.
•The Inverter cannot output voltage beyond that of the incoming voltage.
Maximum Frequency
Set the maximum value of the output frequency.
•The value set here will be the maximum value (e.g.,10 V in the range from 0 to 10 V) of the external
analog input (frequency reference).
•The maximum Inverter output voltage from base to maximum frequencies is the voltage set at AVR
voltage selection A082.
•The Inverter cannot output voltage beyond that of the incoming voltage.
4
Functions
Output voltage
AVR voltage
selection
(100%)
(A082)
Base frequency
(A003/A203)
Maximum frequency
(A004/A204)
4-9
Page 88

4-2 Function Mode
A
Parameter No. Function name Data Default setting Unit
A004 Maximum frequency
*
A204
Related parameters A003, A203, A081, A082
2nd maximum
frequency
30 to 400 50.0 Hz
* To switch to the 2nd max. frequency, allocate 08 (SET) to the multi-function input terminal and then turn it on.
Analog Input (O, OI, VR)
Two types of external analog inputs are available for frequency reference plus the built-in VR
4
For voltage input, you can set a frequency from 0 to maximum by applying a voltage from 0 to 10 V
between inputs O and L. For current input, apply 4 to 20 mA between inputs OI and L. Note that
voltage and current cannot be input simultaneously. Also, do not connect the signal lines for inputs
O and OI simultaneously.
Functions
H OOI L
Reference voltage (10 V)
Voltage input
Current input
nalog ground
[AT]
Inverter VR
H OOI L
A001
Frequency setting
Switching between the inputs could be done by a digial input setting parameter A005.
Parameter No. Function name Data Default setting Unit
00: Switches between O/OI via terminal
AT
02: Switches between O/FREQ adjuster
A005 O/OI selection
Related parameters A011 to A016, A101 to A105, A151 to A155, C001 to C005, C081, C082
Required settings A001 = 01
via terminal AT
03: Switches between OI/FREQ adjuster
via terminal AT
04: O input only
05: OI input only
02 ⎯
Allocate AT (16) to any of the multi-function inputs with the frequency reference set to the terminal
block (A001 or A201 = 01). .
Data Symbol Function name Status Description
16 AT Analog input switching
ON
OFF Same as above.
Related parameters
Depends on the combination with the A005
setting (see the table below).
C001 to C005
The settings are as follows. (VR: FREQ adjuster)
If AT is not allocated to any of the multi-function input, this means the AT input = OFF in the above
table..
A005 set value 00 02 03 04 05
AT terminal input status OFF ON OFF ON OFF ON OFF ON OFF ON
Analog input enabled O-L OI-L O-L VR OI-L VR O-L OI-L
4-10
Page 89

4-2 Function Mode
A
A
External Frequency (Voltage/Current) Adjustment
External Analog Input (Frequency Reference)
O-L terminal: 0 to 10 V (voltage input)
OI-L terminal: 4 to 20 mA (current input)
Also set an output frequency for the FREQ adjuster on the Digital Operator.
Parameter No. Function name Data Default setting Unit
A011
A101
A151
A012
A102
A152
A013
A103
A153
A014
A104
A154
O/OI/VR start frequency
0.00 to 400.0
(Set start/end frequency.)
O/OI/VR end frequency
O/OI/VR start ratio
0. to 100.
(Set a start/end ratio relative to an
external frequency reference of
O/OI/VR end ratio 100.
between 0 to 10 V and 4 to 20 mA.)
0.0 Hz
0.
%
4
Functions
A015
A105
A155
O/OI/VR start selection
00: Start frequency (A011 set value)
01: 0 Hz
01 ⎯
Related parameters A005, A016, AT input
•To input voltage ranging from 0 to 5 V on the O-L terminal, set A014 to 50%.
(Example 1) A015/A105 = 00
Max. frequency
012/A102/A152
011/A101/A151
0
A013/A103
/A153
(0 V/4 mA/VR min.)
A014/A104
/A154
Frequency reference
100%
(10 V/20 mA/VR max.)
(Example 2) A015/A105 = 01
Max. frequency
A012/A102/A152
A011/A101/A151
0
A013/A103
/A153
(0 V/4 mA/VR min.)
A014/A104
/A154
Frequency reference
100%
(10 V/20 mA/VR max.)
O/OI Adjustment
Parameter No. Function name Data Default setting Unit
C081 O adjustment 0.0 to 200.0 100 %
C082 OI adjustment 0.0 to 200.0 100 %
•You can adjust the O/OI frequency input.
•Use this to change the full scale of input.
•The set frequency becomes 0 Hz with 0.0% set.
4-11
Page 90

4-2 Function Mode
•This returns to the factory default value after initialization.
Set frequency
Max.
frequency
200% setting
4
Functions
Max.
frequency/2
0
0V, 4mA 5V, 12mA
100% setting
50% setting
10V, 20mA
O, OI Sampling
Set the built-in filter applied to frequency setting signals via external voltage/current input.
Parameter No. Function name Data Default setting Unit
A016 O, OI sampling 1. to 17. 8. -
Related parameters A011 to A016, C001 to C005
•Helps remove noise in the frequency setting circuit.
•Set a larger data value if stable operation cannot be secured because of noise.
Note that the larger the data value is, the slower the response time.
•In case of setting "17", it indicates the setting of 16 moving average calculation disregarding the
voltage fluctuation equivalent to 0.1 Hz. Though the frequency becomes less likely to fluctuate, the
resolution for analog input decreases. This setting is not suitable for equipment that requires rapid
response.
Multi-step Speed Operation Function
Set different RUN speeds by using codes and switch the set speed via the terminal.
Parameter No. Function name Data Default setting Unit
A020
A220
A021
A022
A023
A024
A025
A026
A027
A028 to A035
Multi-step speed
reference 0
*
2nd multi-step speed
reference 0
Multi-step speed
reference 1
Multi-step speed
reference 2
Multi-step speed
reference 3
Multi-step speed
reference 4
Multi-step speed
reference 5
Multi-step speed
reference 6
Multi-step speed
reference 7
Multi-step speed
references 8 to 15
0.0/Starting frequency to Max.
frequency [A004]
6.0
Hz
0.0
Related parameters F001, C001 to C005, CF1 to CF4 inputs
Required settings F001, A001 = 02
* To switch to the 2nd multi-step speed reference 0, allocate 08 (SET) to the multi-function input terminal and then
turn it on.
4-12
Page 91

4-2 Function Mode
Speed selection could be done setting this values into digital inputs parameters C001 to C005
Data Symbol Function name Status Description
02 CF1 Multi-step speed setting binary 1
03 CF2 Multi-step speed setting binary 2
04 CF3 Multi-step speed setting binary 3
05 CF4 Multi-step speed setting binary 4
•By allocating 02 to 05 (CF1 to CF4) to any of the multi-function inputs, you can select the multistep speed from 0 to 15. Note that multi-step speed terminals not allocated to any multi-function
input are regarded as "OFF". (e.g., if 02 (CF1) and 03 (CF2) are allocated to multi-function input,
the available multi-step speeds should be 0 to 3.)
•For speed 0, you can change the frequency reference with the frequency reference selection
(A001). (e.g., if the frequency reference is set to the control terminal block (terminal, A001: 01), you
can change it via input terminals O and OI.)
•For speed 0, use A020/A220 if the frequency reference is set to the Digital Operator (A001: 02).
•You can also select a multi-step speed by turning on/off the multi-step speed terminals (CF1 to
CF4) and set the multi-step speed frequency with F001.
Multi-step speed terminals Reflected speed
Multi-step speed
CF4 CF3 CF2 CF1
ON Binary operation 1: ON
OFF Binary operation 1: OFF
ON Binary operation 2: ON
OFF Binary operation 2: OFF
ON Binary operation 3: ON
OFF Binary operation 3: OFF
ON Binary operation 4: ON
OFF Binary operation 4: OFF
4
Functions
0th
0
1st 1 A021
0
2nd
1
3rd 1 A023
0
4th
0
5th 1 A025
1
6th
1
7th 1 A027
8th
0
9th 1 A029
0
10th
1
11th 1 A031
1
12th
0
13th 1 A033
1
14th
1
15th 1 A035
0 Reference source according to the A001 setting
0 A022
0 A024
0 A026
0 A028
0 A030
0 A032
0 A034
4-13
Page 92

4-2 Function Mode
Jogging Operation Function
The motor rotates while the input is turned ON..
Parameter No. Function name Data Default setting Unit
A038 Jogging frequency 0.00/Starting frequency to 9.99 6.00
4
Functions
00: Free-run stop
A039 Jogging stop selection
01: Deceleration stop
00
02: DC injection braking stop
Related parameters C001 to C005, JG input
Required settings A002 = 01, A038 > b082, A038 > 0, A039
•The Inverter runs at the speed set in A038 while the JG terminal allocated to one of the multifunction input terminals is turned on. Stop selection is also available in A039.
Jog can be assigned to any of the multifunction inputs setting this value into C001 to C005.
Data Symbol Function name Status Description
ON Operates at the set jogging frequency.
06 JG Jogging operation
OFF Stop
Related parameters C001 to C005
•If the frequency is set to a higher value, the jogging operation may easily lead to a trip. Adjust A038
so that the Inverter does not trip.
(When A039 = 01)
JG
FW
RV
Output frequency
A038
Hz
4-14
•
Note 1: To perform the jogging operation, turn on the JG terminal before the FW or RV terminal.
(Do the same if the RUN command source is set to the Digital Operator.)
JG
FW
Output
frequency
Jogging does not function if the
FW signal turns on beforehand.
Note 2: If A039 is set to 02, set the DC injection braking.
Page 93

4-2 Function Mode
Relation Between Torque Boost and V/f Characteristics
Determine the relation of output voltage against output frequency.
Parameter No. Function name Data Default setting Unit
A041 Torque boost selection
*
A241 2nd torque boost selection
A042 Manual torque boost voltage
*
A242 2nd manual torque boost voltage 0.0
A043 Manual torque boost frequency
00: Manual torque boost
01: Automatic (simple) torque boost
0.0 to 20.0
(Ratio to the value of AVR voltage
selection A082)
00 ⎯
5.0
2.5
0.0 to 50.0
*
A243
2nd manual torque boost
frequency
A044 V/f characteristics selection
(Ratio to base frequency)
00: Constant torque characteristics
0.0
(VC)
*
A244 2nd V/f characteristics selection
01: Reduced torque characteristics
(VP 1.7th power)
06: Special reduced torque
00 ⎯
characteristics (Special VP)
A045 Output voltage gain
20. to 100. 100. %
A245 2nd output voltage gain
Related parameters A082, H003/H203, H004/H204
* To switch to the 2nd control, allocate 08 (SET) to the multi-function input terminal and then turn it on.
Control Method (V/f Characteristics)
%
%
4
Functions
Constant Torque Characteristics (VC)
•Ouput voltage is proportional to output frequency.
While proportional from 0 Hz to base frequency, the output voltage is constant from base to
maximum frequencies regardless of the frequency.
Output
voltage
(100%)
Output
frequency (Hz)
0
Base frequency
(A003/A203)
Max. frequency
(A004/A204)
Reduced Torque Characteristics (VP 1.7th power)
•Suitable for a fan or pump that does not require large torque in a low speed range.
These provide high efficiency, reduced noise and vibration, owing to reduced output voltage in a
low speed range.
Output
voltage
(100%)
0
VP (1.7th
power of VP)
Base frequency
(A003/A203)
Output
frequency (Hz)
Max. frequency
(A004/A204)
4-15
Page 94

4-2 Function Mode
Special Reduced Torque Characteristics (Special VP)
•Suitable for a fan or pump that requires torque in a low speed range using VC characteristics at
this area..
Output
voltage
(100%)
VC
0
10% of base
frequency
ab c
Period a Provides constant torque characteristics (VC) within a range from 0 Hz to 10% of base
4
frequency. (Example) If the base frequency is 50 Hz, the Inverter provides constant torque
characteristics within a range from 0 to 5 Hz.
Period b Provides reduced torque characteristics within a range from 10% to 100% of the base fre-
quency.
The Inverter outputs voltage based on a curve of the 1.7th power of the frequency.
Period c Provides constant voltage within a range from the base frequency to the maximum fre-
quency.
VP
(1.7th power)
Base frequency
(A003/A203)
Output
frequency (Hz)
Max. frequency
(A004/A204)
Functions
Torque Boost
This function helps to compensate insufficient motor torque in a low speed range.
•Compensates the voltage drop caused by the primary resistance of the motor or wiring increasing
the torque in low speed range.
•To select the simple torque boost in the torque boost selection (A041/A241), set the motor capacity
selection (H003/H203) and motor pole number selection (H004/H204) according to your motor.
Manual Torque Boost [A042/A242, A043/A243]
•Adds the voltage set in A042/A242 and A043/A243 to the V/f characteristics, and outputs the
resulting voltage. The addition value is set in percentage terms based on the AVR voltage selection
(A082) as 100%.
•The manual torque boost frequency (A043/A243) is set in percentage terms based on the base
frequency as 100%.
Output
voltage (100%)
Manual torque
boost voltage
(A042/A242)
0
Manual torque boost
frequency (A043/A243)
•If you raise the set value of the manual torque boost (A042/A242) be careful about motor
overexcitation. Otherwise the motor may burn out.
Base frequency
(A003/A203)
Output frequency (Hz)
V/f characteristics
(Example: VC)
Max. frequency
(A004/A204)
Simple Torque Boost [A041/A241]
•If simple torque boost is selected in the torque boost selection (A041/A241: 01), it operates to
adjust the output voltage depending on the load level.
•To select simple torque boost in the torque boost selection (A041/A241), set the motor capacity
selection (H003/H203) and motor pole number selection (H004/H204) according to your motor.
•You may avoid a possible overcurrent trip during deceleration by always setting the AVR selection
to ON (A081: 00).
•Sufficient characteristics may not be obtained if you select two or more lower rank motor size than
specified.
4-16
Page 95

Output Voltage Gain
•Changes the Inverter output voltage in percentage terms based on the AVR voltage selection
[A082] as 100%.
•The Inverter cannot output voltage beyond that of the incoming voltage.
Motor voltage
selection
(A082)
A045
4-2 Function Mode
When A045 = 100
Base frequency
(A003/A203)
Max. frequency
(A004/A204)
DC Injection Braking (DB)
This function securely stops the motor rotation during deceleration.
Parameter No. Function name Data Default setting Unit
00: Disabled
A051
A052
A053
A054
A055 DC injection braking time 0.0 to 60.0 0.5 s
A056
DC injection braking
selection
DC injection braking
frequency
DC injection braking
delay time
DC injection braking
power
DC injection braking
method selection
01: Enabled
02: DB when output frequency
< A052
0.0 to 60.0 0.5 Hz
0.0 to 5.0 0.0 s
0. to 100. 50 %
00: Edge operation
01: Level operation
00 ⎯
01 ⎯
4
Functions
Related parameters C001 to C005
•Two methods are available for DC injection braking: One is the external method via the multifunction input (external DC injection braking); the other is the internal method performed
automatically to stop the motor (internal DC injection braking).
•Below are operation types:
Edge operation: DB operates during the specified time period from the DB signal input.
Level operation: DB operates while a signal is being input.
Frequency control mode: DB operates when the frequency reaches the specified level during
operation.
•If DC injection braking operates at a high motor speed, an overcurrent trip (E01 to E04) or overload
trip (E05) may occur. For internal DC injection braking, the following adjustment may help you
avoid such a situation:
Lower the DC injection braking frequency (A052).
Increase the DC injection braking delay time (A053)
For external DC injection braking via the multi-function input, use the external DC injection braking
terminal (along with deceleration stop).
4-17
Page 96

4-2 Function Mode
External DC Injection Braking (A051 = 00)
•Allocate 07 (DB) to the desired multi-function input. DC injection braking can be applied by turning
on/off the DB terminal, regardless of the DC injection braking selection (A051).
Data Symbol Function name Status Description
4
Functions
ON
07 DB External DC injection braking
OFF
Related parameters C001 to C005
•Set the DC injection braking power in A054.
•If the DC injection braking delay time (A053) is set, the Inverter output will be shut off during the
specified time period and the motor goes into free-run status. After the set time elapses, DC
injection braking starts.
•Set the DC injection braking time (A055) or the DB setting while taking into account motor heat
generation. Long continuous use of DB may cause the motor to burn out.
•Perform each setting according to your system after selecting the level or edge operation in A056
(a) Edge operation (A056: 00) (b) Level operation (A056: 01)
(Example 1-a) (Example 1-b)
FW
DB
Output frequency
Output frequency
DC injection braking is performed
during deceleration.
DC injection braking is not performed
during deceleration.
FW
DB
A055
(Example 2-a) (Example 2-b)
FW
DB
Output frequency
A055
Output frequency
(Example 3-a) (Example 3-b)
FW
DB
Output frequency
Free running
A055A053
Output frequency
FW
DB
FW
DB
Free running
A053
4-18
Page 97

4-2 Function Mode
Internal DC Injection Braking (A051 = 01)
•Performs DC injection braking to stop the motor without any terminal operation.
To use this function, set the DC injection braking selection (A051) to 01.
•Set the DC injection braking power in A054.
•Set the frequency for starting DC injection braking in A052.
•If the DC injection braking delay time (A053) is set, the output is shut off when the frequency
reaches the level set in A052 during deceleration, and free-run status arises for the specified
period. DC injection braking starts after the set time elapses.
•Below are edge/level operations in internal DC injection braking.
Edge operation: Giving priority to the DC injection braking time (A055), performs DC injection
braking for the specified period.
DC injection braking is activated for the set time in A055 when the output
frequency reaches the set value in A052 after RUN command (FW) is turned off.
Even if the RUN command is turned on during DC injection braking, the latter is
effective during the set time in A055.
(Example 4-a), (Example 5-a)
Level operation: Giving priority to the RUN command, shifts to normal operation, ignoring the DC
injection braking time (A055).
If the RUN command is turned on during DC injection braking, returns to normal
operation, ignoring the set time in A055.
(Example 4-b), (Example 5-b)
4
Functions
(a) Edge operation (b) Level operation
(Example 4-a) (Example 4-b)
FW
A052
Free running
A053
Output frequency
A055
Output frequency
(Example 5-a) (Example 5-b)
FW
Output frequency
A052
A055
Output frequency
FW
FW
A052
A052
Free running
A053
A055
A055
Internal DC Injection Braking (Operates Only at the Set Frequency: A051 = 02)
DC injection braking is enabled when the output frequency becomes lower than the DC injection
braking frequency (A052) during operation.
•Neither external (A051 = 00) nor internal (A051 = 01) DC injection braking is available while this
function is selected.
•Operates only when the RUN command is on.
•DC injection braking starts when both the reference and current frequencies become lower than
A052. (Example 6-a)
4-19
Page 98

4-2 Function Mode
•When the reference frequency reaches 2 Hz or higher than the set value in A052, DC injection
braking is released and the output returns to normal. (Example 6-a)
•If the reference frequency is "0" when the operation starts with analog input, the initial operation is
DC injection braking because both the reference and current frequencies are "0". (Example 6-b)
•If the RUN command is turned on with the frequency reference established (or a value larger than
the A052 setting is input), the initial operation is normal output.
(Example 6-a) (Example 6-b)
RUN
command
ON
ON
RUN
command
4
Functions
A052
Frequency
reference
Output
frequency
A052
Frequency
reference
Output
frequency
•The operation to return to normal varies depending on the setting of the DC injection braking
method selection (A056).
(a) Edge operation (b) Level operation
RUN
command
A052
Frequency
reference
Output
frequency
ON
A053
RUN
command
Frequency
reference
Output
frequency
ON
A052
.Frequency Limit
This function limits the Inverter output frequency.
Parameter No. Function name Data Default setting Unit
A061 Frequency upper limit
*
A261
2nd frequency upper
limit
A062 Frequency lower limit
*
A262
2nd frequency lower
limit
Related parameters C001 to C005
* To switch to the 2nd control, allocate 08 (SET) to the multi-function input terminal and then turn it on.
4-20
0.0/Frequency lower limit [A062] to
Max. frequency [A004]
0.0/Frequency lower limit [A262] to
Max. frequency [A204]
0.0/Starting frequency to Frequency
upper limit [A061]
0.0/Starting frequency to Frequency
upper limit [A261]
0.0
0.0
0.0
0.0
Hz
Page 99

4-2 Function Mode
•You can set both upper/lower limits to the set frequency. This function does not accept any
frequency reference beyond the set limits.
•Set the upper limit first.
Make sure the upper limit (A061/A261) is higher than the lower limit (A062/A262).
•Neither limit would work if set to 0 Hz.
Set frequency (Hz)
Max. frequency
A004/A204
A061
A062
Frequency
0V
4mA
10V
20mA
reference
4
If the lower limit is set, the set value is prioritized even if 0 V (4 mA) is input for frequency reference.
Frequency Jump Function
This function helps avoid resonant points of loaded machines.
Parameter No. Function name Data Default setting Unit
A063
A065
A067
A064
A066
A068
Related parameters C001 to C005
•The output frequency cannot be set within the frequency range set in the frequency jump function.
•The output frequency only pass through the jump frequency during acceleration and deceleration
f
Jump frequency 1
Jump frequency 2
0.0 to 400.0 0.0
Jump frequency 3
Jump frequency width 1
Jump frequency width 2
0.0 to 10.0 0.5
Jump frequency width 3
process, but if the frequency reference is set inside this area the output will move automatically out
of this jump area setting a higher or lower frequency depending if inverter is accelerating or
decelerating.
Output
frequency
A067
A065
A068
A068
A066
A066
Functions
Hz
A063
A064
A064
Frequency
reference
4-21
Page 100

4-2 Function Mode
PID Function
This function enables process control of such elements as flow rate, air volume, and pressure.
Parameter No. Function name Data Default setting Unit
A071 PID selection
A072 PID P gain 0.2 to 5.0 1.0 ⎯
A073 PID I gain 0.0 to 150.0 1.0 s
A074 PID D gain 0.00 to 100.0 0.0 s
A075 PID scale 0.01 to 99.99 1.00 Time
4
A076 PID feedback selection
A077 Reverse PID function
00: Disabled
01: Enabled
00: OI
01: O
02: RS485 communication
03: Operation function output
00: Deviation = Target value -
Feedback value
01: Deviation = Feedback value -
Target value
00 ⎯
00 ⎯
00 ⎯
Functions
A078 PID output limit function 0.00 to 100.0 0.0 %
C044
C052 PID FB upper limit
PID deviation excessive
level
0. to 100. 3.0 %
100 %
0.0 to 100.0
C053 PID FB lower limit 0.0 %
Related parameters d004, A001, A005, C001 to C005, C021, C026
•To use this function, set A071 to 01.
•To switch between enable/disable via the terminal block (external signal), allocate 23 (PID enable/
disable) to the desired multi-function input. Select OFF for enable and ON for disable.
Basic Structure of PID Control (Example)
Target value
0 to 10 V
4 to 20 mA
Deviation ε
+
Feedback 0 to 10 V
Kp: Proportional gain Ti: Integral time Td: Derivative time s: Operator
1
K
1
+
p
+
·
sT
i
4 to 20 mA
Control
value
sT
·
d
fs
Normal control
of the Inverter
=
M
Transducer
ε: Deviation
PID Enable/Disable
The PID enable/disable function disables the PID function temporarily through terminal input. This
overrides the A071 setting to control the motor frequency.
Sensor
Data Symbol Function name Status Description
ON Disables the PID function.
23 PID PID enabled/disabled
OFF Does not affect the PID function.
Related parameters
C001 to C005
4-22
 Loading...
Loading...