

Page 1

Cat. No. TOIPC71080603-01-OY
SERVOAZIONAMENTO
SERIE JUNMA
Tipo di comunicazione Mechatolink-I/II
Modello: SJDE-ooANA-OY
MANUALE PER L‘UTENTE
Page 2
Copyright © 2006 YASKAWA ELECTRIC CORPORATION
Tutti i diritti riservati. Nessuna parte della presente pubblicazione può essere riprodotta,
memorizzata in un sistema, trasmessa in qualsivoglia formato o mezzo, meccanico,
elettronico, tramite fotocopia, registrazione o altro, senza previo consenso scritto di
Yaskawa. Non viene assunta alcuna responsabilità palese in relazione all'uso delle
informazioni contenute nel presente manuale. Inoltre, poiché Yaskawa è alla costante
ricerca della migliore qualità per i propri prodotti, le informazioni contenute nel presente
manuale sono soggette a modifiche senza preavviso. Il presente manuale è stato
redatto con la massima attenzione e tuttavia Yaskawa non assume alcuna responsabilità in relazione ad eventuali errori od omissioni,né assume alcuna responsabilità in relazione ad eventuali danni derivanti dalle informazioni in esso contenute.
Page 3
Introduzione
Questo manuale di istruzioni descrive i SERVOPACK c.a. serie JUNMA. Per un uso corretto dei SERVOPACK c.a. serie JUNMA, leggere per intero le seguenti istruzioni ed impiegarle come riferimento in caso
di ispezioni, manutenzione e così via. Assicurarsi che l'utente finale riceva il presente manuale.
Manuali correlati
Fare riferimento ai seguenti manuali per ottenere le informazioni desiderate
Titolo del manuale Codice manuale
MANUALE PER L'UTENTE TOMPC23026100
oppure
TOEPC23026101
Informazioni di sicurezza
Nel presente manuale le precauzioni sono indicate in base alle convenzioni riportate di seguito. La mancata osservanza di tali precauzioni potrebbe causare lesioni gravi, o addirittura fatali, a persone o danni
ai prodotti o ai sistemi e alle apparecchiature correlate.
AVVERTENZA
ATTENZIONE
NON CONSENTITO
OBBLIGATORIO
Indica condizioni che potrebbero causare la morte o lesioni gravi, se non vengono
osservate le precauzioni riportate.
Indica condizioni che potrebbero causare lesioni relativamente gravi o lievi, danni al
prodotto o un errato funzionamento, se non vengono osservate le precauzioni riportate.
In alcuni casi, la mancata osservanza delle precauzioni riportate potrebbe comportare conseguenze gravi.
Indica azioni vietate che non devono essere eseguite. Ad esempio, questo simbolo
potrebbe essere utilizzato nel modo seguente per indicare che non è consentito
utilizzare del fuoco: .
Indica azioni da eseguire obbligatoriamente. Ad esempio, questo simbolo deve
essere utilizzato per indicare che è obbligatorio effettuare la messa a terra: .
Aiuti visivi
I seguenti aiuti vengono utilizzati per indicare determinate informazioni in modo semplice.
• Indica informazioni importanti da memorizzare, incluse precauzioni quali
IMPORTANTE
INFORMAZIONI
la visualizzazione di allarmi onde evitare di danneggiare i dispositivi.
• Indica informazioni aggiuntive.
Marchi
MECHATROLINK è un marchio di MECHATROLINK Members Association.
1
Page 4
Note per un funzionamento sicuro
Leggere per intero le seguenti istruzioni prima della verifica dei prodotti al momento della consegna, prima del trasporto e dello stoccaggio, dell'installazione, del cablaggio, del funzionamento e dell'ispezione, e dello smaltimento del SERVOPACK c.a.
AVVERTENZA
• Accertarsi di aver collegato correttamente i connettori SERVOPACK.
Un cablaggio errato potrebbe provocare scosse elettriche, incendi o danni alle apparec-
chiature. Per il metodo di cablaggio, fare riferimento a 3.4 Cablaggio circuito principale.
• Utilizzare l'ingresso del segnale di arresto di emergenza E-STP per forzare la disattivazione
del servomotore da una sequenza esterna, quale un controllore, in caso di allarme del
servo o di arresto di emergenza del sistema.
La tensione residua fa ruotare il servomotore per alcuni secondi dopo la disattivazione
dell'alimentazione e può essere causa di lesioni o danni alle apparecchiature. Accertarsi
di arrestare completamente il motore disattivando il servo tramite l'arresto di emergenza.
• Configurare l'alimentazione del circuito in modo che venga automaticamente interrotta
nel caso in cui il segnale E-STP si disattivi in seguito a un arresto di emergenza.
La tensione residua fa ruotare il servomotore per alcuni secondi dopo la disattivazione
dell'alimentazione e può essere causa di lesioni o danni alle apparecchiature. Accertarsi
di arrestare completamente il motore disattivando il servo tramite l'arresto di emergenza.
Le informazioni sulla posizione non vengono memorizzate nel SERVOPACK, pertanto
andranno perse in caso di disattivazione dell'alimentazione. Non sarà possibile leggere
nuovamente tali informazioni in caso di disattivazione dell'alimentazione.
• Non toccare mai parti rotanti del motore mentre quest'ultimo è in funzione.
La mancata osservanza di questa avvertenza potrebbe essere causa di lesioni.
• Prima di avviare il funzionamento di una macchina collegata, accertarsi che sia possibile
applicare un arresto di emergenza in qualsiasi momento. Configurare, inoltre, l'alimentazione del circuito in modo che si disattivi automaticamente nel caso in cui il segnale
E-STP sia OFF in seguito a un arresto di emergenza.
La mancata osservanza di questa avvertenza potrebbe essere causa di lesioni.
• Non toccare mai le parti all'interno del SERVOPACK,
in caso contrario potrebbero verificarsi scosse elettriche.
• Una volta disattivata l'alimentazione, attendere cinque minuti prima di toccare i terminali.
La tensione residua potrebbe causare scosse elettriche.
• Attenersi scrupolosamente alle procedure e alle istruzioni riportate nel presente manuale
per il test di funzionamento.
I malfunzionamenti che si verificano dopo il collegamento del servomotore non solo
danneggiano le apparecchiature, ma possono anche causare incidenti gravi o mortali.
• Evitare di rimuovere cavi, connettori o elementi opzionali mentre è attiva l'alimentazione;
in caso contrario potrebbero verificarsi scosse elettriche.
• Installazione, cablaggio e consulenze relative alle ispezioni e ai malfunzionamenti
devono essere eseguiti solo da personale autorizzato.
La mancata osservanza di questa avvertenza potrebbe essere causa di incendi,
scosse elettriche o lesioni.
• Evitare di danneggiare, premere, esercitare pressioni eccessive o posizionare oggetti
pesanti sui cavi o i cavi tra altri oggetti che ne potrebbero causare lo schiacciamento.
La mancata osservanza di questa avvertenza potrebbe essere causa di scosse elettriche,
arresti nel funzionamento del prodotto o bruciature.
2
Page 5
AVVERTENZA
• Installare un dispositivo d'arresto sul lato della macchina per garantirne la sicurezza.
Il freno di stazionamento di un servomotore con freno non è un dispositivo di arresto per la garanzia
della sicurezza. La mancata osservanza di questa avvertenza potrebbe essere causa di lesioni.
• Non avvicinarsi alla macchina subito dopo avere ripristinato una caduta momentanea
di corrente, onde evitare un riavvio inatteso.
Prendere le misure necessarie atte a prevenire un riavvio inatteso. La mancata osservanza
di questa avvertenza potrebbe essere causa di lesioni.
• Non modificare il prodotto in nessun caso.
La mancata osservanza di questa avvertenza potrebbe essere causa di lesioni o danneg-
giare il prodotto.
• Accertarsi di aver effettuato una corretta messa a terra del SERVOPACK e del servomotore.
• Collegare il terminale di messa a terra del SERVOPACK nel rispetto delle norme per
le installazioni elettriche (resistenza di massa: 100 Ω o inferiore).
Una messa a terra errata potrebbe provocare scosse elettriche.
Controlli alla consegna
ATTENZIONE
• Utilizzare sempre il servomotore e il SERVOPACK in una delle combinazioni specificate.
La mancata osservanza di questa avvertenza potrebbe causare incendi o malfunzionamenti.
Stoccaggio e trasporto
ATTENZIONE
• Non immagazzinare o installare il prodotto nei seguenti luoghi.
La mancata osservanza di tale precauzione potrebbe causare danni al prodotto.
• Luoghi esposti alla luce solare diretta.
• Luoghi con temperature al di fuori dell'intervallo di valori riportato nelle condizioni
di temperatura per la conservazione o l'installazione.
• Luoghi con tassi di umidità al di fuori dell'intervallo di valori riportato nelle condizioni
di umidità per la conservazione o l'installazione.
• Luoghi soggetti a formazione di condensa a causa di escursioni termiche estreme.
• Luoghi esposti a gas corrosivi o infiammabili.
• Luoghi esposti a polvere, agenti salini o polveri metalliche.
• Luoghi esposti ad acqua, oli o agenti chimici.
• Luoghi soggetti a urti o vibrazioni.
• Non trasportare il prodotto tenendolo per i cavi o per l'albero motore
La mancata osservanza di questa avvertenza potrebbe causare lesioni o malfunzionamenti.
• Non applicare un carico superiore a quello specificato sulla scatola di imballaggio.
La mancata osservanza di questa avvertenza potrebbe causare lesioni o malfunzionamenti.
3
Page 6
Installazione
ATTENZIONE
• Accertarsi di rispettare le condizioni riportate in 2.1 Condizioni di installazione.
La mancata osservanza di questa avvertenza potrebbe causare scosse elettriche,
incendi o malfunzionamenti del SERVOPACK.
• Non calpestare o appoggiare oggetti pesanti sul prodotto.
La mancata osservanza di questa avvertenza potrebbe essere causa di lesioni.
• Non coprire ingressi e uscite del SERVOPACK ed evitare che corpi estranei, quali frammenti metallici o combustibili, penetrino nel prodotto
La mancata osservanza di questa avvertenza potrebbe causare il deterioramento
di elementi interni con conseguenti incendi o malfunzionamenti.
• Accertarsi di aver collegato il prodotto in senso corretto
La mancata osservanza di questa avvertenza potrebbe essere causa di malfunzionamenti.
• Mantenere le distanze specificate tra il SERVOPACK e il pannello di comando o altri dispositivi.
La mancata osservanza di questa avvertenza potrebbe causare incendi o malfunzionamenti.
• Il SERVOPACK e il servomotore sono apparecchiature di precisione. Evitare urti violenti.
La mancata osservanza di questa avvertenza potrebbe essere causa di malfunzionamenti.
4
Page 7

Cablaggio
AVVERTENZA
• Accertarsi di aver effettuato una corretta messa a terra del SERVOPACK e del servomotore.
• Il cablaggio deve essere eseguito da personale autorizzato specializzato in lavori elettrici.
• Quando si utilizza il servomotore per un asse verticale, installare i dispositivi di sicurezza
per prevenire eventuali cadute di pezzi in seguito all'attivazione di allarmi. La caduta
di pezzi potrebbe causare lesioni o malfunzionamenti.
• Configurare il circuito di interLATCH in modo da bloccare il sistema per evitare eventuali
lesioni ad ogni apertura o chiusura del coperchio di protezione della macchina.
• Utilizzare l'ingresso del segnale di arresto di emergenza E-STP per forzare la disattivazione
del servoazionamento da una sequenza esterna, quale un controllore, in caso di allarme
del servo o di arresto di emergenza del sistema.
La tensione residua fa ruotare il servomotore per alcuni secondi dopo la disattivazione
dell'alimentazione e può essere causa di lesioni o danni alle apparecchiature. Accertarsi
di arrestare completamente il motore disattivando il servo tramite l'arresto di emergenza.
• Quando si esegue la funzione di JOG e la funzione di ricerca di origine utilizzando
CX-Drive, il segnale E-STP verrà ignorato. È necessario adottare contromisure alternative
nel caso sia richiesto un arresto di emergenza.
• Configurare l'alimentazione del circuito in modo che venga automaticamente interrotta
nel caso in cui il segnale E-STP si disattivi in seguito a un arresto di emergenza.
La tensione residua fa ruotare il servomotore per alcuni secondi dopo la disattivazione
dell'alimentazione e può essere causa di lesioni o danni alle apparecchiature.
Le informazioni sulla posizione non vengono memorizzate nel SERVOPACK, pertanto
andranno perse in caso di disattivazione dell'alimentazione. Non sarà possibile leggere
nuovamente tali informazioni in caso di disattivazione dell'alimentazione.
• Quando si esegue la funzione di JOG e la funzione di ricerca di origine utilizzando
CX-Drive, i segnali P-OT e N-OT verranno ignorati. È necessario adottare contromisure
alternative in caso di extracorsa.
5
Page 8
ATTENZIONE
• Non collegare un'alimentazione trifase ai terminali di uscita U, V o W.
La mancata osservanza di questa avvertenza potrebbe causare lesioni o incendi.
• Collegare in modo sicuro i terminali di alimentazione, il terminale di collegamento
del modulo di rigenerazione e i terminali dei cavi del circuito principale del motore.
La mancata osservanza di questa avvertenza potrebbe provocare un incendio.
• Non raccogliere o far passare le linee di alimentazione e di segnale insieme nello stesso
condotto. Mantenere le linee di alimentazione e di segnale a una distanza di almeno 300 mm.
La mancata osservanza di questa avvertenza potrebbe essere causa di malfunzionamenti.
• Utilizzare cavi schermati a doppini intrecciati o cavi schermati a doppini intrecciati a più
conduttori per i cavi del segnale di I/O e dell'encoder.
La lunghezza massima è 3 m per il cavo del segnale di I/O e 20 m per il cavo dell'encoder.
• Una volta disattivato il LED dell'alimentazione, attendere cinque minuti prima di toccare i terminali
di alimentazione, in quanto potrebbe esservi ancora un'elevata tensione residua nel SERVOPACK.
• Evitare di attivare e disattivare di continuo l'alimentazione. Evitare di attivare e disattivare
l'alimentazione più di una volta al minuto.
Poiché il SERVOPACK dispone di un sistema di alimentazione dotato di condensatore, si verifica un elevato flusso di corrente di carica quando viene attivata l'alimentazione. Una frequente attivazione e disattivazione dell'alimentazione causa un deterioramento dei principali
dispositivi di alimentazione, quali condensatori e fusibili, che porta a problemi non previsti.
• Tenere conto delle seguenti precauzioni durante il cablaggio del connettore per il modulo
di alimentazione/rigenerazione.
• Rimuovere il connettore per il modulo di alimentazione/rigenerazione dal SERVOPACK
prima di eseguire il cablaggio.
• Inserire solo un cavo per terminale sul connettore per il modulo di alimentazione/rigenerazione.
• Accertarsi che il filo conduttore non vada in cortocircuito con i fili conduttori adiacenti.
• Assicurarsi di aver effettuato un cablaggio sicuro e corretto,
La mancata osservanza di questa avvertenza potrebbe causare un overrun del motore,
lesioni o malfunzionamenti.
• Utilizzare sempre la tensione di alimentazione monofase da 200 a 230 V specificata senza
eseguire il collegamento diretto a un'alimentazione di 400 V.
Il SERVOPACK verrà distrutto.
• Adottare le misure necessarie per garantire che l'alimentazione in ingresso fornita rientri
nella gamma di fluttuazione specificata.
L'uso di un'alimentazione non appropriata potrebbe danneggiare il prodotto.
• Installare interruttori esterni o altri dispositivi di sicurezza per evitare cortocircuiti nelle aree
di cablaggio esterno.
La mancata osservanza di questa avvertenza potrebbe provocare un incendio.
• Adottare contromisure adeguate e sufficienti quando si installano sistemi nei luoghi di seguito riportati.
La mancata osservanza di tale precauzione potrebbe causare danni al prodotto.
• Luoghi soggetti a elettricità statica o altre forme di disturbi.
• Luoghi soggetti a forti campi magnetici o elettromagnetici.
• Luoghi potenzialmente esposti a radioattività.
• Luoghi in prossimità di sistemi di alimentazione, incluse le linee di alimentazione.
• Non invertire la polarità della batteria durante il cablaggio del modulo di rigenerazione.
La mancata osservanza di tale precauzione potrebbe causare danni al prodotto.
6
Page 9

Funzionamento
ATTENZIONE
• Effettuare le prove di funzionamento sul servomotore solo con l'albero motore scollegato
dalla macchina per evitare incidenti non previsti.
La mancata osservanza di questa avvertenza potrebbe essere causa di lesioni.
• Durante l'esecuzione della funzione di JOG e della funzione di ricerca di origine con
CX-Drive, i segnali di marcia avanti inibita (P-OT), marcia indietro inibita (N-OT) e arresto
di emergenza (E-STP) verranno ignorati. È necessario adottare contromisure alternative
in caso di extracorsa e arresto di emergenza.
• Quando si utilizza il servomotore per un asse verticale, installare i dispositivi di sicurezza
per prevenire eventuali cadute di pezzi in seguito all'attivazione di allarmi.
La caduta di pezzi potrebbe causare lesioni o malfunzionamenti.
• Non toccare i dissipatori di calore del SERVOPACK, il modulo di rigenerazione
o il servomotore mentre è attiva l'alimentazione o subito dopo averla disattivata.
La mancata osservanza di questa avvertenza potrebbe causare ustioni dovute
a temperature elevate.
• Quando scatta un allarme, rimuoverne la causa, disattivare l'alimentazione e riattivarla
dopo aver verificato la sicurezza e quindi riprendere il funzionamento.
La mancata osservanza di questa avvertenza potrebbe essere causa di lesioni.
• Non utilizzare il freno di stazionamento del servomotore per operazioni di frenata normali.
La mancata osservanza di questa avvertenza potrebbe essere causa di malfunzionamenti.
Manutenzione e ispezione
ATTENZIONE
• Una volta che si è spento l'indicatore di alimentazione (PWR LED), attendere 5 minuti prima
di aprire il case del SERVOPACK. Una volta disattivata l'alimentazione, nel SERVOPACK
potrebbe essere ancora presente alta tensione.
• Una volta disattivata l'alimentazione, attendere 15 minuti prima di sostituire la ventola
di raffreddamento.
La mancata osservanza di questa avvertenza potrebbe provocare ustioni dovute all'elevata
temperatura del dissipatore di calore.
• Installare la ventola di raffreddamento nel modo corretto descritto in 9.3 Sostituzione ven-
tola di raffreddamento.
Un'installazione errata potrebbe provocare guasti al SERVOPACK.
• Non tentare di modificare il cablaggio in presenza di alimentazione.
La mancata osservanza di questa avvertenza potrebbe provocare scosse elettriche o lesioni.
• Non toccare i dissipatori di calore del SERVOPACK, il modulo di rigenerazione o il servomotore mentre è attiva l'alimentazione o subito dopo averla disattivata.
Smaltimento
ATTENZIONE
• Durante lo smaltimento dei prodotti, considerarli come rifiuti industriali generali.
7
Page 10
Precauzioni generali
Per un'applicazione sicura, tenere presente quanto riportato di seguito.
• Le illustrazioni presenti in questo manuale talvolta non includono coperchi o ripari protettivi. Riposizionare sempre il coperchio o il riparo protettivo come indicato, prima di mettere in funzione
i prodotti secondo le indicazioni del manuale.
• Le illustrazioni presenti in questo manuale sono esempi tipici e potrebbero non corrispondere
con il prodotto ricevuto.
• Tale manuale è soggetto a variazioni dovute a miglioramenti del prodotto, modifiche delle
specifiche e miglioramenti del manuale stesso. Quando il manuale viene revisionato, il relativo
codice viene aggiornato e il nuovo manuale viene pubblicato come edizione successiva.
• Qualora fosse necessario riordinare il manuale in seguito a perdita o danneggiamento, informare
il rappresentante Omron Yaskawa di zona o uno degli uffici riportati sul retro del manuale.
• Omron Yaskawa non è responsabile di risultati dovuti a modifiche non autorizzate del prodotto.
Omron Yaskawa non è responsabile per eventuali danni o problemi dovuti a modifiche non autorizzate.
8
Page 11

SOMMARIO
Introduzione- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -1
Manuali correlati - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -1
Informazioni di sicurezza - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -1
Aiuti visivi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -1
Marchi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -1
Note per un funzionamento sicuro - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -2
1 Prima dell'uso- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -13
1.1 Verifica dei prodotti - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 13
1.2 Etichetta di avviso - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 13
1.3 Legenda modello - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 14
1.4 SERVOPACK e servomotori applicabili - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 14
1.5 Nomi e funzioni dei componenti - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 15
1.6 Standard applicabili - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 16
1.6.1 Standard di sicurezza nordamericani (UL, CSA) - - - - - - - - - - - - - - - - - - - - - - - - - 16
1.6.2 Direttive europee - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 16
2 Installazione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 17
2.1 Condizioni di installazione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 17
2.2 Metodo di installazione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 18
3 Cablaggio- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -19
3.1 Configurazione del sistema - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 19
3.2 Collegamento standard - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 20
3.3 Precauzioni per il cablaggio - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 21
3.3.1 Protezione per linea di alimentazione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 21
3.3.2 Precauzioni per la messa a terra- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 21
3.3.3 Precauzioni per il cavo- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 22
3.3.4 Caduta di tensione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 22
3.3.5 SERVOPACK e dispositivi periferici applicabili - - - - - - - - - - - - - - - - - - - - - - - - - - 22
3.3.6 Prevenzione dei disturbi- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 23
3.3.7 Condizioni di installazione e cablaggio su marchiatura CE - - - - - - - - - - - - - - - - - 26
3.3.8 Altre precauzioni - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 27
3.4 Cablaggio circuito principale- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 27
3.4.1 Cavi di potenza SERVOPACK - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 27
Cablaggio connettore per il modulo di alimentazione/rigenerazione (CNA) - - - - - - 32
3.4.2
Cablaggio connettore per il cavo di potenza del servomotore (CNB) - - - - - - - - - - 34
3.4.3
3.4.4 Cablaggio connettore encoder (CN2) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 38
3.4.5
Cablaggio del connettore del segnale di I/O (CN1) - - - - - - - - - - - - - - - - - - - - - - - 39
9
Page 12

3.4.6 Cablaggio dei connettori per la rete MECHATROLINK-II
(CN6A e CN6B) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 41
3.4.7 Cablaggio del connettore del personal computer (CN9) - - - - - - - - - - - - - - - - - - - - 43
3.5 Esempi di collegamento del segnale di ingresso - - - - - - - - - - - - - - - - - - - - - - - - - - - 44
3.6 Esempio di collegamento del segnale di uscita - - - - - - - - - - - - - - - - - - - - - - - - - - - - 45
3.7 Segnali di I/O - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 46
3.7.1 Ingresso segnale di decelerazione per la ricerca dell’origine - - - - - - - - - - - - - - - - 46
3.7.2 Ingresso segnale di latch esterno - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 46
3.7.3 Ingresso segnale arresto di emergenza - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 47
3.7.4 Ingressi marcia avanti/indietro inibita (ingressi extracorsa) - - - - - - - - - - - - - - - - - - 49
3.7.5 Uscita di allarme del servoazionamento - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 50
3.7.6 Uscita di interLATCH freni- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 50
3.8 Impostazione rete MECHATROLINK-II - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
3.8.1 Comunicazioni MECHATROLINK-II - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 5
3.8.2 Specifiche per il cablaggio - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 52
3.8.3 Impostazione delle specifiche di comunicazione - - - - - - - - - - - - - - - - - - - - - - - - - 53
3.8.4 Ciclo di trasmissione e numero di stazioni - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 54
3.8.5 Indicatore di stato della rete MECHATROLINK-II LED COM - - - - - - - - - - - - - - - - 54
52
4 Comandi MECHATROLINK-II - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 55
4.1 Elenco comandi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 55
4.1.1 Elenco dei comandi principali - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 55
4.1.2 Elenco sottocomandi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 57
4.2 Comandi principali - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 58
4.2.1
Fasi di comunicazione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 58
4.2.2 Nessun funzionamento (NOP: 00H)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 60
4.2.3 Leggi parametro (PRM_RD: 01H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 61
Scrivi parametro (PRM_WR: 02H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 62
4.2.4
4.2.5
Leggi ID (ID_RD: 03H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 63
4.2.6 Configura dispositivo (CONFIG: 04H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 64
Leggi allarme o avviso (ALM_RD: 05H)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 65
4.2.7
4.2.8
Cancella allarme o avviso (ALM_CLR: 06H) - - - - - - - - - - - - - - - - - - - - - - - - - - - 66
4.2.9
Avvia comunicazione sincrona (SYNC_SET: 0DH)- - - - - - - - - - - - - - - - - - - - - - - 67
4.2.10
Stabilisci collegamento (CONNECT: 0EH)- - - - - - - - - - - - - - - - - - - - - - - - - - - - 68
Rilascia collegamento (DISCONNECT: 0FH) - - - - - - - - - - - - - - - - - - - - - - - - - - 69
4.2.11
4.2.12
Scrivi parametro memorizzato (PPRM_WR: 1CH) - - - - - - - - - - - - - - - - - - - - - - 69
4.2.13
Imposta coordinate (POS_SET: 20H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 70
Applica freno (BRK_ON: 21H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 70
4.2.14
Rilascia freno (BRK_OFF: 22H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 72
4.2.15
Attiva sensore (SENS_ON: 23H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 73
4.2.16
4.2.17
Disattiva sensore (SENS_OFF: 24H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 73
Arresta movimento (HOLD: 25H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 74
4.2.18
4.2.19 Richiesta modalità di LATCH (LTMOD_ON: 28H) - - - - - - - - - - - - - - - - - - - - - - - 75
4.2.20 Rilascia modalità di LATCH (LTMOD_OFF: 29H)- - - - - - - - - - - - - - - - - - - - - - - - 76
4.2.21 Monitoraggio stato (SMON: 30H)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 77
4.2.22 Servo ON (SV_ON: 31H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 78
4.2.23 Servo OFF (SV_OFF: 32H)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 79
10
2
Page 13

4.2.24 Avanzamento interpolazione (INTERPOLATE: 34H) - - - - - - - - - - - - - - - - - - - - - 80
4.2.25 Posizionamento (POSING: 35H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 81
4.2.26 Avanzamento velocità costante (FEED: 36H) - - - - - - - - - - - - - - - - - - - - - - - - - - 82
4.2.27 Avanzamento interpolazione con rilevamento posizione (LATCH: 38H) - - - - - - - - 83
4.2.28 Posizionamento ingresso esterno (EX_POSING: 39H)- - - - - - - - - - - - - - - - - - - - 84
4.2.29 Ricerca di origine (ZRET: 3AH) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 85
4.2.30 Regolazione (ADJ: 3EH) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 87
4.3 Sottocomandi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 90
4.3.1 Nessun funzionamento (NOP: 00H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 90
4.3.2 Leggi parametro (PRM_RD: 01H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 90
4.3.3 Scrivi parametro (PRM_WR: 02H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 91
4.3.4 Leggi allarme o avviso (ALM_RD: 05H) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 91
4.3.5 _PPRM_WriteParameter 1CH) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 92
4.3.6 Richiedi modalità di LATCH (LTMOD_ON: 28H) - - - - - - - - - - - - - - - - - - - - - - - - - 92
4.3.7 Rilascia modalità di LATCH (LTMOD_OFF: 29H)- - - - - - - - - - - - - - - - - - - - - - - - - 93
4.3.8 Monitoraggio stato (SMON: 30H)- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 93
4.4 Combinazione di comandi e sottocomandi MECHATROLINK-II. - - - - - - - - - - - - - - - - 94
4.5 Campo dati di comando - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 95
4.5.1 Specifiche campo segnale di LATCH: LT_SGN - - - - - - - - - - - - - - - - - - - - - - - - - - 95
5.2 Specifiche campo opzioni: OPTION - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 95
4.
4.5.3
Specifiche campo di stato: STATUS - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 96
4.5.4 Specifiche campo di selezione del monitoraggio e di informazioni sul monitoraggio:
SEL_MON1/2/3/4, MONITOR1/2/3/4- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 101
4.5.5 Specifiche campo di monitoraggio I/O: IO_MON - - - - - - - - - - - - - - - - - - - - - - - - 103
4.5.6 Specifiche campo di sottostato: SUBSTATUS - - - - - - - - - - - - - - - - - - - - - - - - - - 104
4.5.7 Specifiche campo di allarme/avviso: ALARM - - - - - - - - - - - - - - - - - - - - - - - - - - 105
4.6 Temporizzazione comando e risposta - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 108
4.6.1 Temporizzazione esecuzione dati di comando - - - - - - - - - - - - - - - - - - - - - - - - - 108
4.6.2 Temporizzazione ingresso dati di monitoraggio - - - - - - - - - - - - - - - - - - - - - - - - - 108
4.7 Sequenza funzionamento - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 109
4.7.1 Sequenza di funzionamento per la gestione
dei parametri tramite l'uso di un controllore - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 109
4.7.2 Sequenza di funzionamento per la gestione dei parametri tramite
l'uso del SERVOPACK - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 110
4.7.3 Sequenza funzionamento per attivazione servo - - - - - - - - - - - - - - - - - - - - - - - - 111
4.7.4 Sequenza funzionamento quando viene emesso il segnale OT
(Interruttore di finecorsa) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 111
4.7.5 Sequenza funzionamento mentre viene emesso il segnale E-STP - - - - - - - - - - - 111
5 Test di funzionamento - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 113
6 Funzioni- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 118
6.1 Impostazione filtro - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 118
6.2 Commutazione della direzione di rotazione del servomotore - - - - - - - - - - - - - - - - - - 119
6.3 Riduzione elettronica - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 120
6.3.1 Impostazione della riduzione elettronica - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 120
11
Page 14

6.4 Gestione della posizione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -123
6.5 Comandi di movimento - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -124
6.5.1 Comandi correlati a INTERPOLATE- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -124
6.5.2 Comandi correlati a POSING - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -124
6.6 Funzione di extracorsa del software - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -125
6.6.1 Condizioni necessarie per abilitare la funzione di extracorsa del software - - - - - - -125
6.6.2 Parametri correlati alla funzione di extracorsa del software - - - - - - - - - - - - - - - - -125
6.6.3 Monitoraggio degli extracorsa del software- - - - - - - - - - - - - - - - - - - - - - - - - - - - -126
6.7 Area di LATCH - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -127
7 Parametri - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 128
7.1 Editor dei parametri- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -128
7.2 Elenco dei parametri - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -129
8 Soluzione dei problemi- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 134
8.1 Visualizzazione allarmi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -136
8.2 Visualizzazione degli avvisi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -138
8.3 Visualizzazione degli allarmi/avvisi e soluzione dei problemi - - - - - - - - - - - - - - - - - - -139
8.3.1 Visualizzazione degli allarmi/avvisi e soluzione dei problemi - - - - - - - - - - - - - - - -139
8.3.2 Visualizzazione degli avvisi e soluzione dei problemi- - - - - - - - - - - - - - - - - - - - - -149
8.4 Soluzione dei problemi per malfunzionamento senza visualizzazione dell'allarme - - - -151
9 Ispezioni- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 156
9.1 Ispezioni regolari - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -156
9.2 Durata prevista dei componenti - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -156
9.3 Sostituzione ventola di raffreddamento - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -157
10 Specifiche- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 163
10.1 Specifiche - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -163
10.2 Inerzia consentita - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -165
10.3 Caratteristiche di sovraccarico - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -166
Storico delle revisioni
12
Page 15
1.1 Verifica dei prodotti
1 Prima dell'uso
1.1 Verifica dei prodotti
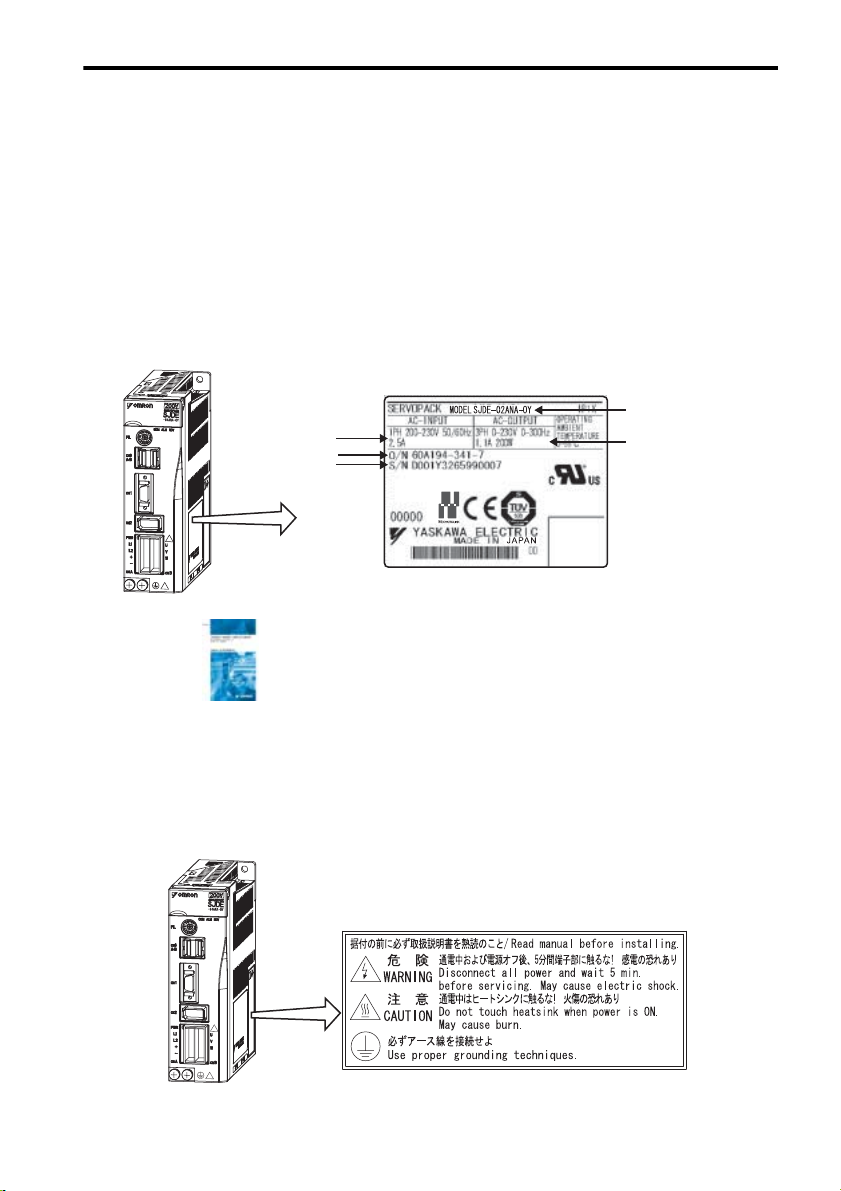
Verificare che siano stati consegnati i seguenti elementi insieme al SERVOPACK. Verificare che il prodotto ricevuto sia quello ordinato tramite il codice del modello riportato sulla targhetta del SERVOPACK.
Se si riscontrano delle irregolarità, quali un modello errato di SERVOPACK, parti danneggiate e componenti mancanti, contattare il rappresentante Omron Yaskawa di zona o il rivenditore presso cui sono
stati acquistati i prodotti.
SJDE
SERVOPACK
Targa d'identificazione
Alimentazione
consentita
Numero ordine
Numero di serie
Una copia di questo manuale di istruzioni codice del connettore JZSP-CHG9-1
Modello
SERVOPACK
Potenza applicabile
del motore
1.2 Etichetta di avviso
Un'etichetta di avviso è situata sul lato del SERVOPACK.
SJDE
SERVOPACK
Etichetta di avviso del SERVOPACK
13
Page 16

1.3 Legenda modello
1.3 Legenda modello
SJDE—02 A N A - OY
SERVOPACK SJDE serie JUNMA
Taglia applicabile del servomotore
Codice
Uscita (W)
100
01
200
02
400
04
750
08
Tensione alimentazione
A: 200 Vc.a.
Specifiche interfaccia
N: MECHATROLINK-II
Ordine delle revisioni
di progettazione
A
Distribuito da OMRON YASKAWA Motion Control B.V.
1.4 SERVOPACK e servomotori applicabili
Uscita
nominale
100 W SJME-01AM41-OY SJME-01AM4C-OY SJDE-01ANA-OY
200 W SJME-02AM41-OY SJME-02AM4C-OY SJDE-02ANA-OY
400 W SJME-04AM41-OY SJME-04AM4C-OY SJDE-04ANA-OY
750 W SJME-08AM41-OY SJME-08AM4C-OY SJDE-08ANA-OY
Senza freno Con freno
Servomotori SERVOPACK
14
Page 17
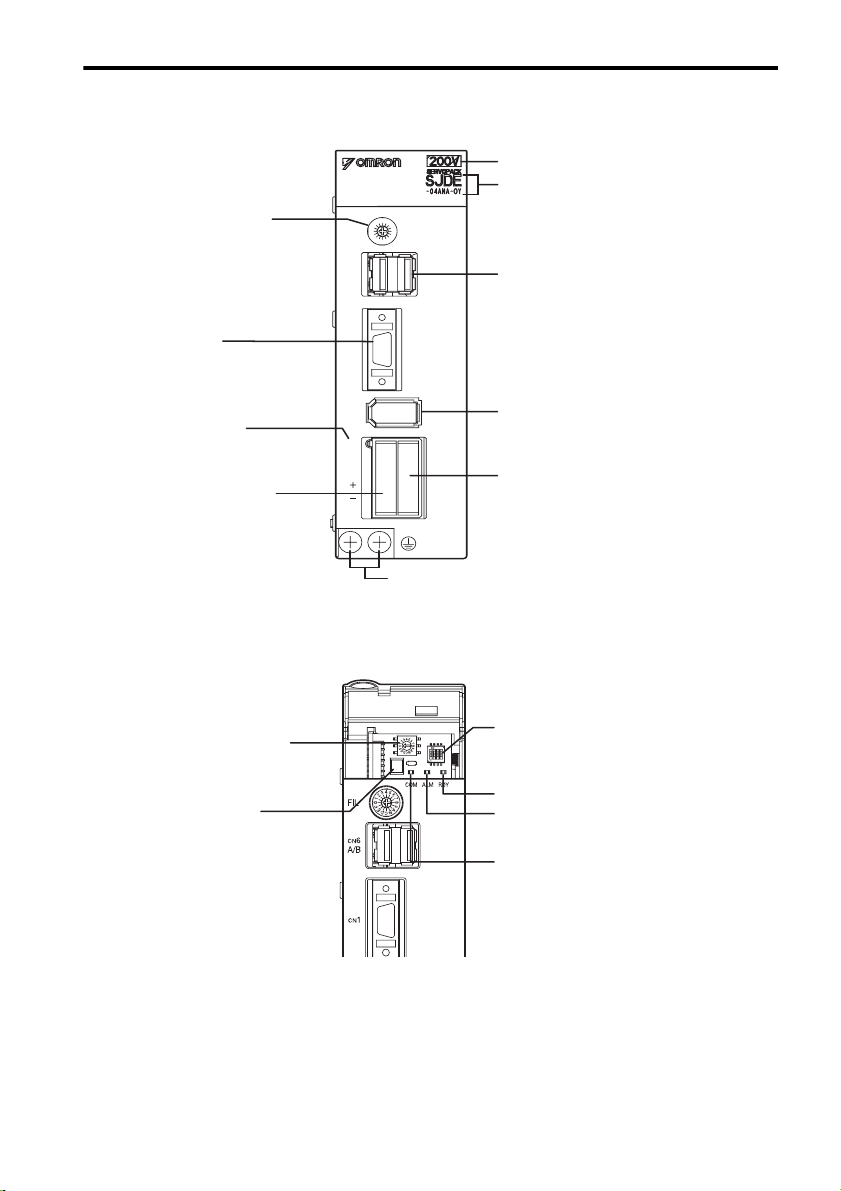
1.5 Nomi e funzioni dei componenti
1.5 Nomi e funzioni dei componenti
Tensione di ingresso
Modello
COM
ALM
RDY
4
5
3
Selettore rotativo
per impostazione filtro
per il riferimento
impostazione (FIL)
Fare riferimento a 6.1
Impostazione filtro.
Connettore
dei segnali di I/O (CN1)
Fare riferimento a y.
Indicatore
di alimentazione
(PWR)
Connettore per modulo di
alimentazione/rigenerazione (CNA)
Fare riferimento a 3.4.2 Cablaggio
connettore per il modulo di alimentazione/rigenerazione (CNA).
Impostazioni rete MECHATROLINK-II
Gli interruttori SW1 e SW2 regolano le impostazioni della rete MECHATROLINK-II. Le impostazioni
modificate vengono rese effettive alla prima riattivazione dell'alimentazione.
FIL
CN
A/B
CN
CN
PWR
CN
6
1
2
L1
L2
A
6
2
7
1
8
0
9
F
A
E
B
D
C
U
V
W
CN
Terminale di terra
Connettore per comunicazione
MECHATROLINK-II (CN6)
Fare riferimento a 3.4.6 Cablaggio dei
connettori per la rete MECHATROLINK-II
(CN6A e CN6B).
Connettore encoder (CN2)
Fare riferimento a 3.4.4 Cablaggio
connettore encoder (CN2).
Connettore per cavo circuito principale
servomotore (CNB)
B
Fare riferimento a 3.4.3 Cablaggio connet-
tore per il cavo di potenza del servomotore
(CNB).
interruttore di rotazione per impostazione
indirizzo stazione MECHATROLINK-II (SW1)
Fare riferimento alla sezione 3.8
Impostazione comunicazioni
MECHATROLINK-II.
Connettore per personal
computer (CN9)
15
DIP switch per impostazione comunicazioni
MECHATROLINK-II (SW2)
Fare riferimento alla sezione 3.8 Impostazione
rete MECHATROLINK-II.
Indicatore di stato del servo (RDY)
Indicatore di allarme (ALM)
Fare riferimento al capitolo
8 Soluzione dei problemi.
Indicatore per stato comunicazioni
MECHATROLINK-II (COM)
Fare riferimento alla sezione
3.8.5 Indicatore di
stato della rete
MECHATROLINK-II COM LED
e 8 Soluzione dei problemi.
Page 18

1.6 Standard applicabili
1.6 Standard applicabili
I SERVOPACK serie JUNMA sono conformi ai seguenti standard.
1.6.1 Standard di sicurezza nordamericani (UL, CSA)
Modello
SERVOPACK SJDE
Servomotore SJME
* 1. Underwriters Laboratories Inc.
* 2. CSA (Canadian Standard Association, Associazione canadese per la standardizzazione).
Standard UL∗1 (n. file UL) Standard CSA
UL508C (E147823) CSA C22.2 n. 14 UL
UL1004 (E165827) CSA C22.2 n. 100 UL
∗2
Certifica-
zione
1.6.2 Direttive europee
Modello Direttiva per le
SERVOPACK
Servomotore
* TÜV Product Services GmbH
Nota: 1. Poiché i SERVOPACK e i servomotori sono di tipo integrato, necessitano di una nuova conferma dopo
l'installazione nel prodotto finale.
SJDE EN50178 EN55011
SJME IEC60034-1
basse tensioni
IEC60034-5
IEC60034-8
IEC60034-9
Direttiva sulla compatibilità
elettromagnetica (EMC)
EMI EMS
classe A, gruppo 1
EN55011
classe A, gruppo 1
Certifica-
zione
EN61000-6-2 TUV PS*
EN61000-6-2 TUV PS*
16
Page 19

2.1 Condizioni di installazione
2 Installazione
Di seguito vengono descritti la posizione e il metodo di installazione del SERVOPACK.
2.1 Condizioni di installazione
Caratteristica Specifiche
Temperatura di funzionamento 0°C … +55°C
Umidità di funzionamento 90% di umidità relativa o inferiore (senza condensa)
Temperatura di stoccaggio –20°C … +70°C
Umidità di stoccaggio 90% di umidità relativa o inferiore (senza condensa)
Luogo di installazione Privo di gas corrosivi
Altitudine 1.000 m o inferiore
Resistenza alle vibrazioni
Resistenza agli urti
Condizioni di funzionamento Categoria di installazione (categoria di sovratensione): II
Installazione in un
pannello di controllo
Installazione
Luogo di
installazione
in prossimità
di un modulo
di riscaldamento
Installazione in
prossimità di una
fonte di vibrazioni
Installazione
in un luogo esposto
a gas corrosivi
Privo di polvere e polvere di ferro
Non soggetto a umidità o olio lubrificante quale l'olio per taglio.
2
4,9 m/s
2
19,6 m/s
Grado di inquinamento: 2
Classe di protezione: IP1X (EN50178)
Progettare le dimensioni del pannello di controllo, il layout del modulo
e il metodo di raffreddamento in modo che la temperatura intorno
al SERVOPACK non superi i 55°C.
Nota: Per aumentare la durata del prodotto e conservarne l'affi-
dabilità, mantenere la temperatura all'interno del pannello
di controllo al di sotto dei 45°C.
Ridurre al minimo le radiazioni termiche provenienti dal modulo
di riscaldamento ed eventuali aumenti di temperatura causati da una
convezione naturale, in modo che la temperatura intorno al SERVOPACK non superi i 55°C.
Installare un attenuatore di vibrazioni sotto al SERVOPACK per evitare
di sottoporlo a vibrazioni
I gas corrosivi non hanno un effetto immediato sul SERVOPACK
ma, a lungo termine, provocano un malfunzionamento dei componenti
elettronici e dei dispositivi correlati al contattore. Prendere misure
adeguate per evitare la presenza di gas corrosivi.
17
Page 20

2.2 Metodo di installazione
2.2 Metodo di installazione
Direzione e metodo di installazione
• Installare il SERVOPACK perpendicolarmente alla parete.
• Collegare in modo sicuro i fori di montaggio alla superficie di montaggio utilizzando viti M4.
SJDE-08ANA-OY: tre fori di montaggio SJDE-01 … 04ANA-OY: due fori di montaggio
Piastra di installazione
SERVOPACK
Vite M4
Vite M4
Vite M4
Piastra di installazione
SERVOPACK
Vite M4
Vite M4
Spazio tra i moduli SERVOPACK
• Se installati all'interno del pannello di controllo, accertarsi di lasciare dello spazio tra moduli
SERVOPACK adiacenti, come indicato nella figura seguente, in modo da consentire
il raffreddamento dei moduli.
ATTENZIONE
• Non coprire ingressi e uscite del SERVOPACK ed evitare che corpi estranei, quali frammenti
metallici o combustibili, penetrino nel prodotto
La mancata osservanza di questa avvertenza potrebbe causare il deterioramento di elementi
interni con conseguenti incendi o malfunzionamenti.
50 mm
min.
Direzione di
uscita dell'aria
30 mm
min.
10 mm
min.
18
50 mm
min.
Direzione di
entrata dell'aria
Page 21

3 Cablaggio
3.1 Configurazione del sistema
Alimentazione
Monofase, 200 Vc.a.
L1 L2
Dispositivo di sezionamento
Per proteggere le apparecchiature e il cablaggio,
collegare sempre un dispositivo di sezionamento.
Filtro antidisturbo
Utilizzato per eliminare i disturbi
dalle linee di alimentazione.
Dispositivo di
protezione da picchi
Protegge il
sistema da
sovratensione
dovuta a fulmine.
Contattore magnetico
Utilizzato per disattivare l'alimentazione
del servo quando si utilizza
un modulo di rigenerazione
o un arresto di emergenza.
Utilizzato per
un servomotore
con freno.
Alimentazione
a 24 Vc.c.*
*1
SERVOPACK
SJDE
3.1 Configurazione del sistema
Software per personal
computer: CX-One
PLC della serie CJ
Modulo di posizionamento
CJ1W-NCF71
serie CJ1
Collegamento
MECHATROLINK-II
Reattanza c.a.
Utilizzata la
soppressione
delle armoniche
dell'alimentazione.
Fusibile
Per proteggere le
apparecchiature, installare
sempre dei fusibili.
Relè freno
Cavo del segnale di I/O
Consente il collegamento
a un PLC serie CJ
AVVERTENZA
Collegare in modo corretto
i connettori CNA e CNB.
Un cablaggio errato potrebbe
provocare scosse elettriche, lesioni
o danni alle apparecchiature.
Una volta eseguito il cablaggio,
installare i connettori come indicato
nelle sezioni 3.8 Cablaggio del
connettore del modulo di
alimentazione/rigenerazione (CNA)
e 3.9 Cablaggio del connettore del
cavo di potenza del servomotore
(CNB).
Utilizzato per
un modulo di rigenerazione.
Modulo di rigenerazione
Utilizzato in caso di
energia di rigenerazione
elevata.
Ai circuiti di
controllo del
contattore
magnetico
Connettori per cavo di potenza
servomotore (CNB)
Connettori per modulo di
alimentazione/rigenerazione
(CNA)
* 1. Fornire un'alimentazione a 24 Vc.c. per il freno, separatamente dall'alimentazione delle sequenze.
Cavo di potenza
servomotore (per relè)
19
Servomotori
SJME
Page 22

3.2 Collegamento standard
3.2 Collegamento standard
Alimentazione
monofase, 200 Vc.a. … 230 Vc.a.
50/60 Hz
L1 L2
Dispositivo di sezionamento
Dispositivo di protezione da picchi
Alimentazione
a 24 Vc.c.
AVR 2
Filtro
antidisturbo
200 Vc.a.
…
230 Vc.a.
+24 V 0 V
MC1
SW1 SW2
MC1
Controllore
130Ω
C1 C2
Modulo di
rigenerazione
JUSP-
RG08D
Cavo
MECHATROLINK-II
MC1
Ry1
Diodo
volano
MC1
Reattanza
Soppressore di picchi
+
–
Y4
Y5
Cavo schermato
Terminazione
SG_COM
Cavo schermato
Fusibile
Fusibile
/TXD
/RXD
GND
130Ω
24 VIN
/EXT1
/DEC
N-OT
P-OT
E-STP
ALM
/BK
L1
L2
+
–
S
/S
Alimentazione
a 24 Vc.c.
AVR 1*
+24 V
200 Vc.a. …
230 Vc.a.
0 V
SERVOPACK
CNA CNB
1
2
3
4
CN9
1
2
3,4
CN6A
A2
A3
Guscio
CN6B
B2
B3
CN1
5
1
3,3 kΩ
2
3,3 kΩ
3
3,3 kΩ
4
3,3 kΩ
6
3,3 kΩ
12
13
7
Ry1
CN2
Guscio
Varistore
1
2
3
1
2
3
4
5
6
7
8
9
10
U
V
W
Cavo schermato
PG5V
PG0V
A+
A-
B+
B-
/Z
U
V
W
Cavo schermato
5
6
1
U
2
V
Servomotore
3
W
4
1
2
3
4
5
6
7
8
9
10
12
Fren o
FG
Encoder
Nota: 1. AVR1: alimentazione a 24 Vc.c.
per freno
AVR2: alimentazione a 24 Vc.c.
per sequenze
PB1: interruttore OFF alimentazione
PB2: interruttore ON alimentazione
MC1: contattore magnetico
Ry1: relè freno
• Esempio di componenti
Soppressore
di picchi
Okaya Electric Industries
Co., Ltd.
CRE-50500
Diodo volano Toshiba Corporation 1NH42
Relè freno OMRON Corporation Serie MY
Varistore NIPPON CHEMI-CON
TNR7V121K
CORPORATION
20
Page 23

3.3 Precauzioni per il cablaggio
2. Il circuito di protezione a terra è progettato per gli errori di messa a terra all'interno degli avvolgimenti
del motore mentre quest'ultimo è in funzione. Pertanto, potrebbe non proteggere il sistema quando si
verificano le seguenti condizioni.
• Si verifica un errore di messa a terra con resistenza bassa tra il cavo di potenza e il connettore del
servomotore.
• L'alimentazione viene attivata durante un errore di messa a terra.
Per configurare un sistema più sicuro, installare un rilevatore di errori di messa a terra per la protezione da sovraccarichi e cortocircuiti, oppure installare un rilevatore di errori di messa a terra insieme
a un interruttore di circuito di cablaggio per la protezione a terra.
3. Le informazioni sulla posizione non vengono memorizzate nel SERVOPACK, pertanto andranno perse
in caso di disattivazione dell'alimentazione. Qualora tali informazioni fossero necessarie per il funzionamento del controllore, verificare che il sistema sia dotato di un segnale di arresto di emergenza
(E-STP) in grado di arrestare le operazioni senza disattivare l'alimentazione.
* 1. Fornire un'alimentazione a 24 Vc.c. per sequenze separatamente dall'alimentazione a 24 Vc.c. per freno.
3.3 Precauzioni per il cablaggio
AVVERTENZA
• Accertarsi di aver effettuato una corretta messa a terra del SERVOPACK e del servomotore.
• Il cablaggio deve essere eseguito da personale autorizzato specializzato in lavori elettrici.
• Configurare l'alimentazione del circuito in modo che venga automaticamente interrotta nel caso
in cui il segnale E-STP si disattivi in seguito a un arresto di emergenza. (vedere 3.7.3 Ingresso
segnale arresto di emergenza).
La tensione residua fa ruotare il servomotore per alcuni secondi dopo la disattivazione dell'alimentazione e può essere causa di lesioni o danni alle apparecchiature. Accertarsi di arrestare completamente il motore disattivando il servo tramite l'arresto di emergenza.
Le informazioni sulla posizione non vengono memorizzate nel SERVOPACK, pertanto andranno
perse in caso di disattivazione dell'alimentazione. Non sarà possibile leggere nuovamente tali
informazioni in caso di disattivazione dell'alimentazione.
• Quando si utilizza il servomotore per un asse verticale, installare i dispositivi di sicurezza per
prevenire eventuali cadute di pezzi in seguito all'attivazione di allarmi. La caduta di pezzi potrebbe
causare lesioni o malfunzionamenti.
• Configurare il circuito di interLATCH in modo da bloccare il sistema per evitare eventuali lesioni
ad ogni apertura o chiusura del coperchio di protezione della macchina.
3.3.1 Protezione per linea di alimentazione
• Utilizzare un dispositivo di sezionamento e un fusibile per proteggere la linea di alimentazione. Il SERVOPACK
si collega direttamente a un'alimentazione commerciale senza un trasformatore, utilizzare, pertanto, sempre
un dispositivo di sezionamento e un fusibile per proteggere il servosistema da alte tensioni accidentali.
3.3.2 Precauzioni per la messa a terra
Durante la messa a terra del SERVOPACK, tenere in considerazione le seguenti condizioni.
• Nel caso di un filo di terra, utilizzare un cavo che sia il più spesso possibile (2,0 mm2 o superiore).
• È consigliabile utilizzare una resistenza di massa pari a 100 (Ω) o inferiore.
• Effettuare la messa a terra in un unico punto.
21
Page 24

3.3 Precauzioni per il cablaggio
3.3.3 Precauzioni per il cavo
• Per il cablaggio, utilizzare i cavi specificati. Utilizzare cavi che siano il più corti possibili.
• Non piegare o applicare tensioni ai cavi. Il conduttore di un cavo di segnale è sottile
(0,08 … 0,12 mm2); pertanto, maneggiare i cavi con attenzione.
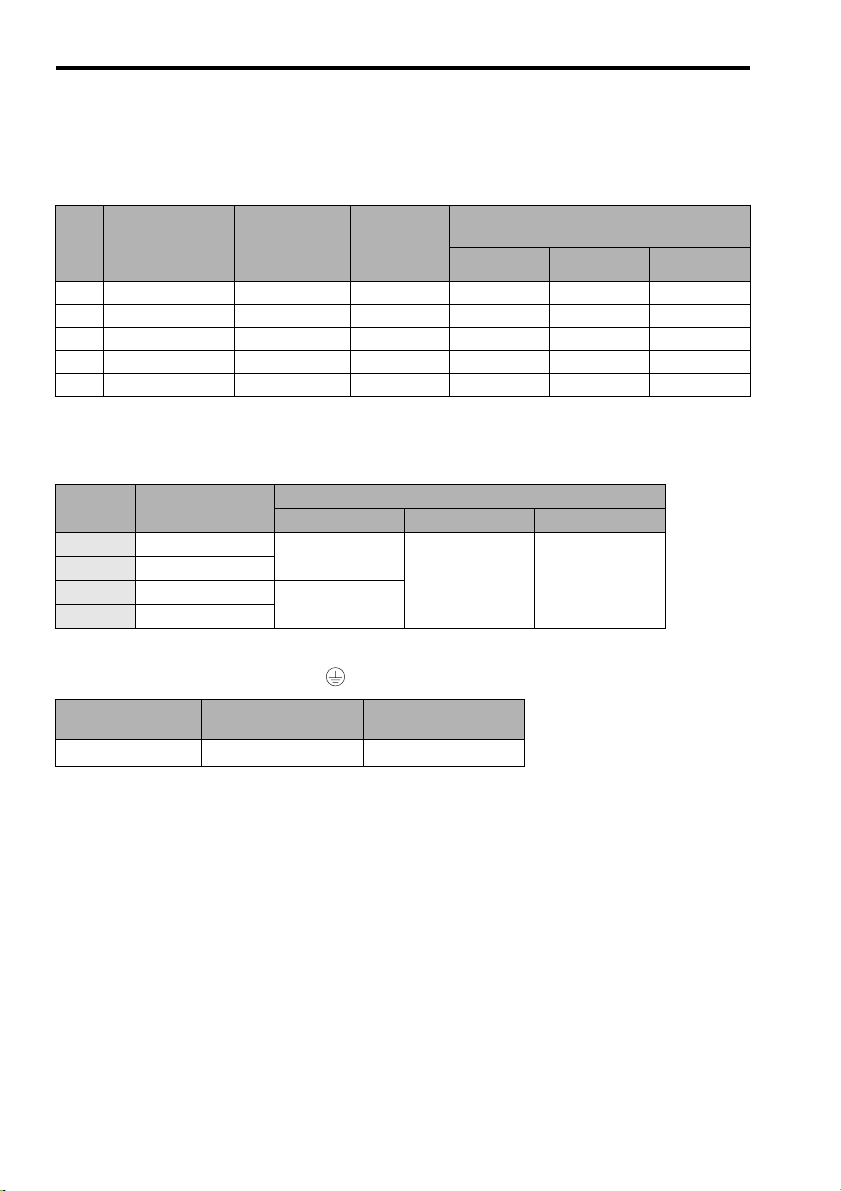
3.3.4 Caduta di tensione
Caduta di tensione con uscita nominale SERVOPACK
Alimenta-
zione
circuito
principale
Monofase
200 V
SERVOPACK
Modello Potenza
SJDE-01ANA-OY 100 W 0,84 6 9 15
SJDE-02ANA-OY 200 W 1,1 8 17
SJDE-04ANA-OY 400 W 2,0 16 25
SJDE-08ANA-OY 750 W 3,7 27 36
Corrente
di uscita
(valore effettivo)
A
Caduta di ten-
sione circuito
principale
W
Caduta di ten-
sione circuito di
controllo
W
Caduta
di tensione
totale
W
Nota: Valori ottenuti con l'uscita nominale del servomotore.
3.3.5 SERVOPACK e dispositivi periferici applicabili
SERVOPACK Potenza
Tipo
SJDE01ANA-OY
SJDE02ANA-OY
SJDE04ANA-OY
SJDE08ANA-OY
Produttore
Nota: Si consiglia di utilizzare un interruttore di uso generico per corrente da 200 mA o superiore o un interrut-
* 1. Valore nominale al carico nominale. Per selezionare il dispositivo di sezionamento appropriato, è richiesta
la riduzione specificata.
* 2. Caratteristiche di taglio (25°C): 200% due secondi min. e 700% 0,01 secondi min.
Pote n-
alimenta-
za
zione per
SERVO-
PAC K
kVA
100 W
200 W
400 W
750 W
0,40 4 0KLK
0,75 X5053
1,2 8 X5054
2,2 16 0KLK
tore per inverter (per alte frequenze).
Val ore di
di
corrente di
alimentazione per
dispositivo di
sezionamento A
(rms)
– – Littelfuse
*1 *2
Valore di
alimenta-
zione
e modello
di fusibile
esterno
015.T
(15 A
(rms))
030.T
(30 A
(rms))
Inc.
Cor-
Contat-
rente
spunto
A0p
tore
di
magne-
tico
30 HI-11J R7A-
60 HI-15J R7A-
–Yaskawa
Controls
Co., Ltd.
Filtro
antidisturbo
FIZN105-
BE
FIZN109-
BE
Block
Elektronik
Disposi-
tivo di
prote-
zione da
sovracor-
rente
RxCxM-
601BQZ-4
Okaya
Electric
Industries
Co., Ltd.
Reattanza
c.a.
X5052
X5056
Ya s k a w a
Controls
Co., Ltd.
IMPORTANTE
Errore di terra
Il circuito di protezione a terra è progettato per gli errori di messa a terra all'interno degli
avvolgimenti del motore mentre quest'ultimo è in funzione. Pertanto, potrebbe non proteggere il sistema quando si verificano le seguenti condizioni.
• Si verifica un errore di messa a terra tra il cavo di potenza e il connettore del servomotore.
• L'alimentazione viene attivata durante un errore di messa a terra.
Per configurare un sistema più sicuro, installare un rilevatore di errori di messa a terra per
la protezione da sovraccarichi e cortocircuiti oppure installare un rilevatore di errori di
messa a terra insieme a un interruttore di circuito di cablaggio per la protezione a terra.
22
Page 25

3.3.6 Prevenzione dei disturbi
Esempio di cablaggio la prevenzione dei disturbi
3.3 Precauzioni per il cablaggio
Filtro antidisturbo
200 Vc.a.
* 1. Per i cavi collegati a custodie per scopi di installazione, utilizzare cavi con un diametro pari a 3,5 mm2
o superiore. Si consiglia di utilizzare cavi in rame intrecciati piatti.
* 2. Utilizzare cavi a doppini intrecciati per la sezione P.
2LF
Dimensioni
cavo
Custodia
min.:
2
3,5 mm
1.
*
P
Dimensioni cavo min.: 3,5 mm
Custodia
Sequenza funzionamento relè
Circuito di generazione
segnale utente
*2.
2
P
*1.
AVR
(messa
a terra)
Custodia
P
1LF
Custodia
2 mm2 o superiore
Custodia
SJDE
SERVOPACK
L1
L2
Dimensioni cavo min.:
2
3,5 mm
*1.
Piastra di messa a terra
Messa a terra: Effettuare la messa a terra
in un unico punto.
Resistenza di massa min.: 100 Ω
CN1
U
V
W
CN2
Dimensioni
cavo
min.:
3,5 mm
Dimensioni
cavo
min.:
3,5 mm
2
2
Servomotore
M
(FG)
(PG)
Messa a terra corretta
• Messa a terra dell'involucro del servomotore:
accertarsi di collegare il terminale di messa a terra sull'involucro del servomotore al terminale
di messa a terra sul SERVOPACK.
• Accertarsi di mettere a terra il terminale di messa a terra del SERVOPACK.
• Se i cavi di potenza del servomotore sono posizionati in un condotto di metallo, mettere a terra
il condotto e la scatola di messa a terra.
È necessario utilizzare la messa a terra in un unico punto.
23
Page 26
3.3 Precauzioni per il cablaggio
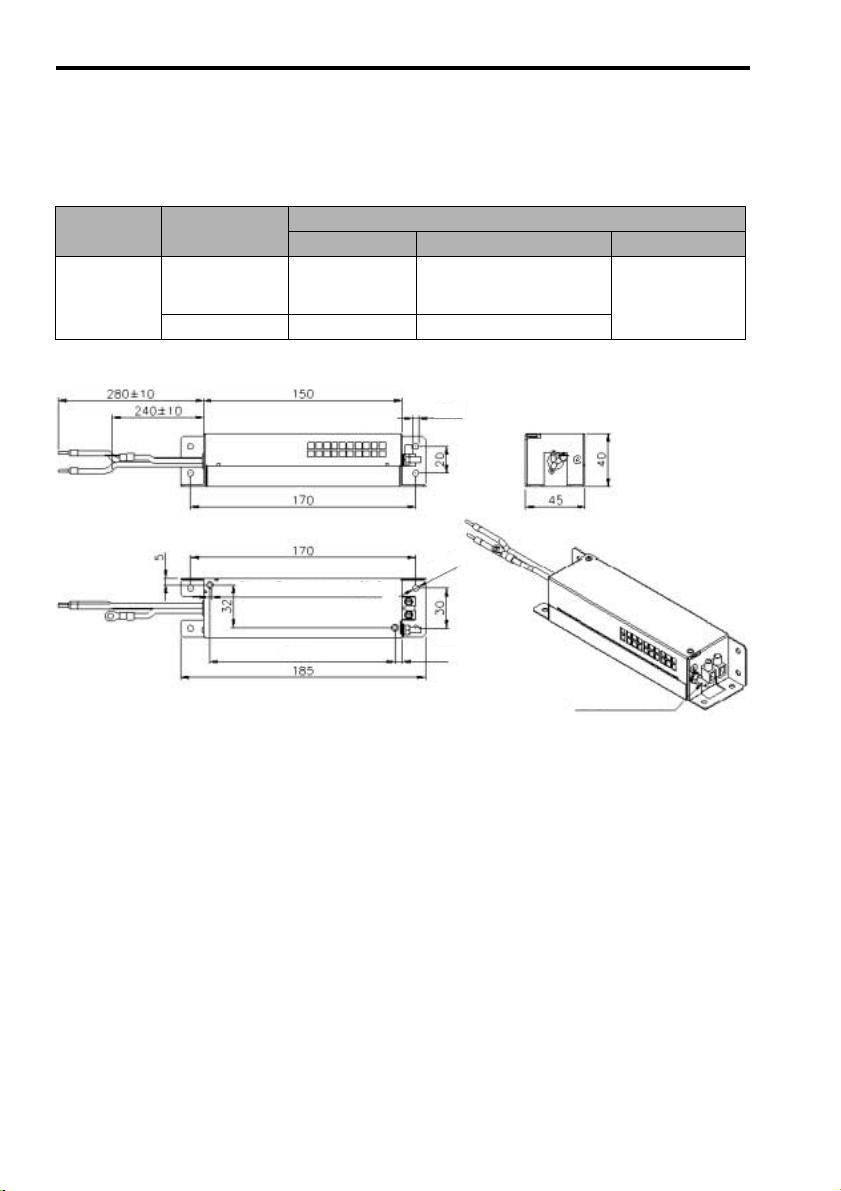
Filtri antidisturbo
Utilizzare filtri antidisturbo per la prevenzione di disturbi sull’alimentazione.
Nella tabella seguente sono elencati i filtri antidisturbo consigliati per diversi modelli di SERVOPACK.
Applicazione di filtri antidisturbo
Tensione ali-
mentazione
Monofase
230 V +10%
50 – 60 Hz
Dimensioni filtro R7A-FIZN105-BE
Modello
SERVOPACK
SJDE-01ANA-OY
SJDE-02ANA-OY
SJDE-04ANA-OY
SJDE-08ANA-OY
Filtri antidisturbo consigliati
Modello Specifiche Produttore
R7A-FIZN105-BE Monofase 250 Vc.a., 5 A
R7A-FIZN109-BE Monofase 250 Vc.a., 9 A
Ø 4,5
Transformatoren
GmbH & Co. KG.
Block
Elektronik
Elemento di fissaggio cieco
M4 (2x)
139,5
Ø 4,5
5,5
PE Bullone M4x15
24
Page 27
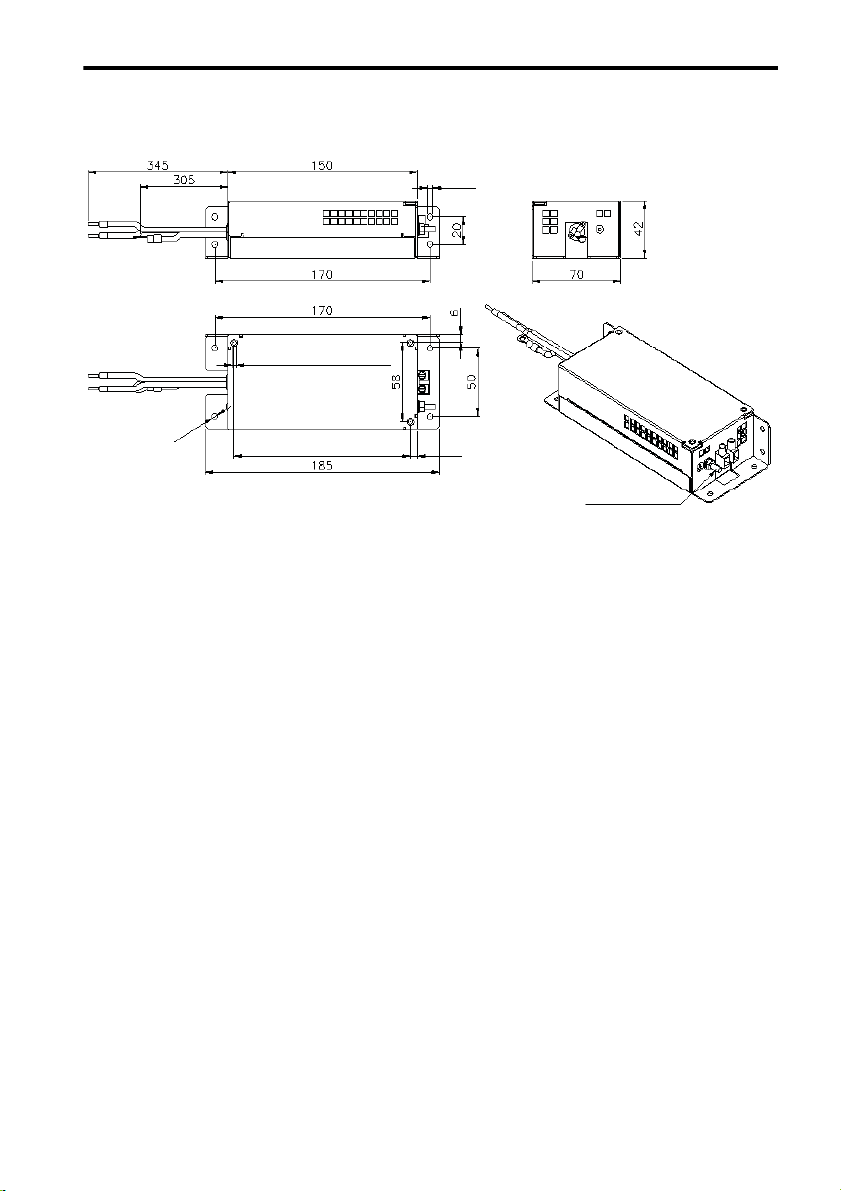
Dimensioni filtro per modello R7A-FIZN109-BE
Elemento di fissaggio cieco M4 (3x)
3.3 Precauzioni per il cablaggio
Ø 4,5
Ø 4,5
139,5
5,5
PE Bullone M4x15
25
Page 28

3.3 Precauzioni per il cablaggio
3.3.7 Condizioni di installazione e cablaggio su marchiatura CE
Condizioni di installazione in conformità alle direttive EMC
Per adattare una combinazione di un servomotore SJME e un SERVOPACK SJDE conforme alle direttive
EMC (EN55011, gruppo 1, classe A e EN61000-6-2), è necessario soddisfare le seguenti condizioni.
Poiché i SERVOPACK sono di tipo integrato, necessitano di una nuova conferma dopo l'installazione
nel prodotto finale
IMPORTANTE
Alimentazione
monofase
200 Vc.a.
PE
Il livello EMC effettivo potrebbe differire in base alla configurazione di sistema effettiva,
al cablaggio e ad altre condizioni.
Piastra di messa a terra
Alimentazione
5
Fermacavo
Dispositivo di
protezione da
sovracorrente
Modulo di
rigenerazione
Filtro
antidisturbo
freno
SERVOPACK
L1, L2
+,–
2
Nucleo
di ferrite
Controllore
U, V, W
CN2
CN1CN6
1
Nucleo
di ferrite
Nucleo
di ferrite
Fermacavo
3
4
Nucleo
di ferrite
Giunzione cavo
Nucleo
di ferrite
Servomotore
Nucleo
di ferrite
Giunzione cavo
Freno
Encoder
Simbolo Nome cavo Specifiche
A Cavo segnali di I/O Cavo schermato
B Cavo per rete MECHATROLINK-II Cavo schermato
C Cavo di potenza servomotore Cavo schermato
D Cavo encoder Cavo schermato
E Cavo linea c.a. Cavo schermato
Installazione del nucleo di ferrite
Arrotolare il cavo di potenza del servomotore (come un collegamento) intorno al nucleo di ferrite con
due giri, quindi collegarli dal SERVOPACK. Fare riferimento al diagramma nella pagina precedente.
Cavo (due giri)
Nucleo di ferrite
Nota: Nucleo di ferrite consigliato
Modello: ESD-SR-25 (Tokin. Corp.)
26
Page 29
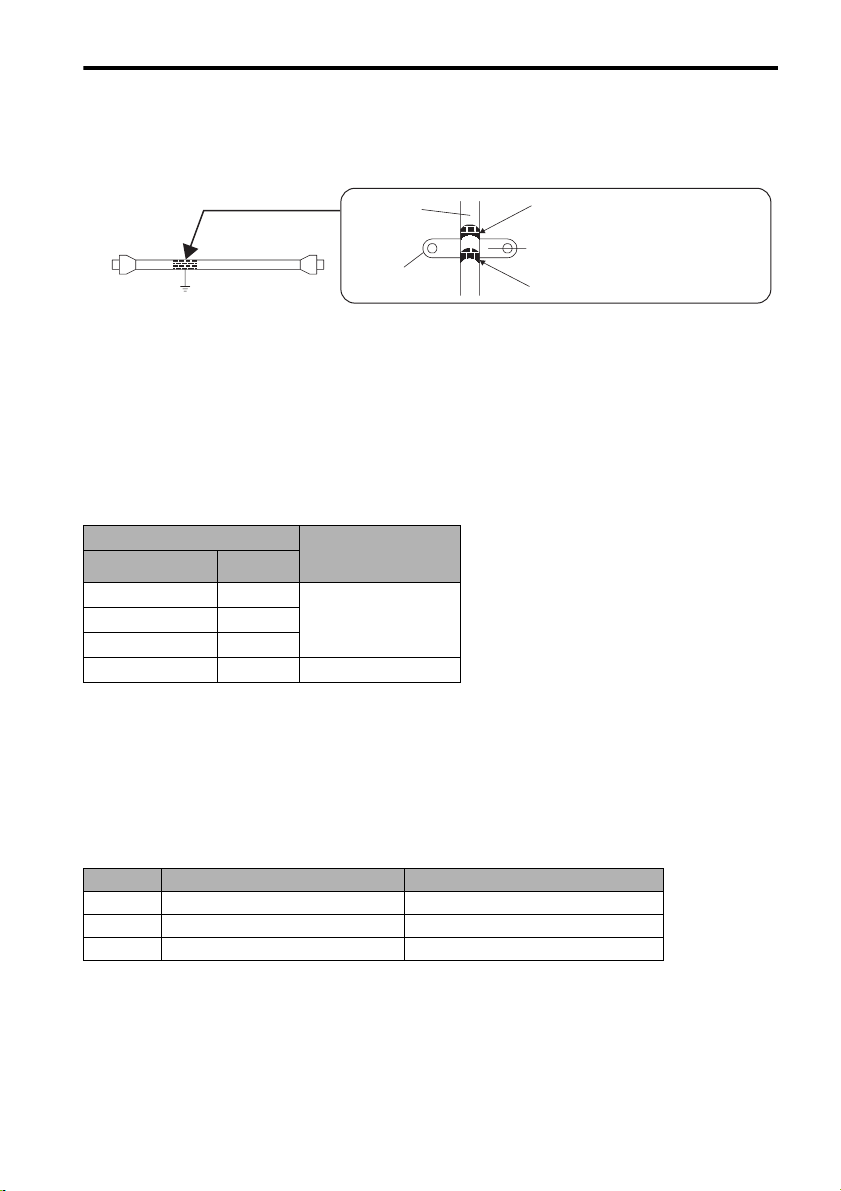
3.4 Cablaggio circuito principale
Fissaggio del cavo
Fissare e mettere a terra la schermatura del cavo utilizzando un pezzo di metallo conduttivo (morsetto del cavo).
• Esempio di morsetto del cavo
Lato
controllore
Piastra di messa a terra
Cavo
Morsetto
del cavo
Schermatura (guaina del cavo scoperta)
Fissare e mettere a terra la schermatura
del cavo utilizzando un pezzo di
metallo conduttivo.
Rimuovere le tracce di vernice sulla
superficie di montaggio.
Scatola schermata
Per le interferenze magnetiche (EMI), è necessario utilizzare una scatola schermata, ossia una custodia
metallica chiusa. La struttura della scatola deve consentire di collegare alla messa a terra il corpo principale,
la porta e il modulo di raffreddamento. L'apertura della scatola deve essere quanto più piccola possibile.
3.3.8 Altre precauzioni
• Non ruotare il motore esternamente indipendentemente dalla presenza o meno di elettricità sul motore stesso.
• Quando si riavvia l'alimentazione subito dopo averla disattivata, il SERVOPACK potrebbe generare
un allarme. Fare riferimento al tempo di mantenimento dell'alimentazione riportato nella tabella
seguente per riavviare correttamente l'alimentazione.
SERVOPACK Tempo di attesa min.
Modello Potenza
SJDE-01ANA-OY 100 W
SJDE-02ANA-OY 200 W
SJDE-04ANA-OY 400 W
SJDE-08ANA-OY 750 W
prima del riavvio
(s)
20
30
3.4 Cablaggio circuito principale
• I SERVOPACK SJDE sono idonei per i luoghi con un'alimentazione inferiore ai 5.000 A (rms) (230 V max.).
• È necessario utilizzare i SERVOPACK con i fusibili o dispositivi di sezionamento conformi agli standard UL, con rispetto alla normativa National Electrical Code (NEC).
• Utilizzare cavi in rame termoresistenti a una temperatura di 75°C o equivalenti.
3.4.1 Cavi di potenza SERVOPACK
Tipi di cavo
Simbolo Nome Temperatura conduttore consentita
PVC Cavo in vinile normale
IV Cavo in vinile da 600 V
HIV
• Le dimensioni dei cavi sono selezionate per tre cavi per fascio a una temperatura ambiente di 40°C
• Utilizzare cavi con una tensione di resistenza minima di 600 V per i circuiti principali.
• Se i cavi sono contenuti in condotti metallici o in PVC, tenere in considerazione il rapporto di ridu-
• Utilizzare cavi termoresistenti al di sotto della temperatura ambiente o della temperatura del quadro
• Non utilizzare cavi in condizioni di stato rigenerativo continuo.
Cavo in vinile resistente alle temperature
con la corrente nominale.
zione della corrente consentita.
in situazioni in cui i cavi in vinile normali si deteriorano rapidamente e non possono essere utilizzati
in un breve periodo di tempo.
27
−
60°C
75°C
Page 30
3.4 Cablaggio circuito principale
Dimensioni dei cavi e corrente consentita
La tabella seguente mostra le dimensioni dei cavi e la corrente consentita per tre fili. Utilizzare un cavo
le cui caratteristiche corrispondano o siano inferiori alla corrente consentita riportata nella tabella.
• Cablaggio in vinile termoresistenti (HIV) da 600 V
Di-
Diametro sezione
men-
sioni
AWG
20 0,5 19/0,18 39,5 6,6 5,6 4,5
– 0,75 30/0,18 26,0 8,8 7,0 5,5
18 0,9 37/0,18 24,4 9,0 7,7 6,0
16 1,25 50/0,18 15,6 12,0 11,0 8,5
14 2,0 7/0,6 9,53 23 20 16
Nota: I valori nella tabella sono solo di riferimento.
trasversale
nominale
2
mm
Terminali di ingresso dell'alimentazione (L1, L2), terminali di collegamento del
Numero di confi-
gurazione dei
cavi/mm
2
Resistenza
conduttiva
2
Ω/mm
Corrente consentita alla temperatura ambiente
A
30°C 40°C 50°C
motore (U, V, W) e terminali di collegamento del modulo di rigenerazione (+, –)
Potenza
W
100
200
400
750
Nota: I connettori vengono utilizzati per tutti i collegamenti.
Tipo
di SERVOPACK
SJDE-01ANA-OY
SJDE-02ANA-OY
SJDE-04ANA-OY
SJDE-08ANA-OY
Codice morsetti
L1, L2 U, V, W +, –
HIV 1,25 mm
HIV 2,0 mm
2
2
HIV 1,25 mm
Lunghezza
cablaggio:
20 m max.
2
HIV 1,25 mm
Lunghezza
cablaggio:
0,5 m max.
2
Terminale di messa a terra ( )
Dimensione filo Dimensione delle viti
HIV 2,0 mm2 min.
del terminale
M4 1,2 … 1,4 Nxm
Coppia di serraggio
28
Page 31

Elenco dispositivi periferici
3.4 Cablaggio circuito principale
Nome Specifiche Tipo Lun-
Cavo di
potenza per
servomotori
Junma
senza freno
SJME0@AMB41OY
Cavo di
potenza per
servomotori
Junma con
freno SJME0@AMB4COY
Kit connettore per
cavo di
potenza
servomo-
*1
tore
Cavi flessibili
(standard)
Raggio di curvatura cavo
schermato conforme agli standard UL/CSA
(dinamico) >
Ø 10x Cicli >
10 milioni
Cavi flessibili
(standard)
Raggio di curvatura cavo schermato conforme
agli standard
UL/CSA (dinamico) > Ø 10x
Cicli > 10 milioni
Tipo a crimpare
estremità
motore
(comune per
servomotori con
o senza freno)
Tipo a molla
estremità SER-
VOPACK (CNB)
(comune per
servomotori con
JZSP-CHM000-01-5E
JZSP-CHM000-03-E
JZSP-CHM000-05-E
JZSP-CHM000-10-E
JZSP-CHM000-15-E
JZSP-CHM000-20-E
JZSP-CHM030-01-5E
JZSP-CHM030-03-E
JZSP-CHM030-05-E
JZSP-CHM030-10-E
JZSP-CHM030-15-E
JZSP-CHM030-20-E
JZSP-CHM9-1
JZSP-CHM9-2
∗2
∗3
o senza freno)
Tipo a crimpare
estremità
SERVOPACK
(CNB)
(comune per
servomotori con
Fare riferimento alla
pagina 35.
o senza freni)
Kit connettore per
modulo di
alimenta-
one/rigene-
zi
*
1
razione
Tipo a molla
estremità
SERVOPACK
(CNA)
(comune per
servomotori con
o senza freni)
JZSP-CHG9-1
∗3
ghezza
1,5 m
3 m
5 m
10 m
15 m
20 m
1,5 m
3 m
5 m
10 m
15 m
20 m
–
–
–
–
Aspetto Produt-
14
tore
Omron
Ya s k aw a
Motion
Control,
*4
BV.
J.S.T.
Mfg Co.,
*5
Ltd.
Omron
Ya s k aw a
Motion
Control,
*4
BV.
29
Page 32

3.4 Cablaggio circuito principale
Nome Specifiche Tipo Lun-
Cavo encoder per servomotori
Junma
SMJE0@AMB4@OY
Cavi flessibili
(standard)
Raggio di curvatura cavo
schermato conforme agli standard UL/CSA
(dinamico) >
Ø 10x Cicli >
10 milioni
Cavi non
flessibili
Kit connettore per
cavo enco-
*1
der
Tipo a crimpare
estremità
motore
Tipo a saldare
estremità
SERVOPACK
(CN2) (nero)
Tipo a saldare
estremità
SERVOPACK
(CN2) (grigio)
Cavo segnale di I/O JZSP-CHI003-01
Kit connettore per cavo
segnale di
I/O (CN1)
*
1
Tipo a saldare
estremità SERVOPACK
JZSP-CHP800-01-5E
JZSP-CHP800-03-E
JZSP-CHP800-05-E
JZSP-CHP800-10-E
JZSP-CHP800-15-E
JZSP-CHP800-20-E
R7A-CRZ003C
R7A-CRZ005C
R7A-CRZ0010C
JZSP-CHP9-1
∗2
JZSP-CHP9-2
JZSP-CHP9-3
JZSP-CHI003-02
JZSP-CHI003-03
R7A-CPZ001S
R7A-CPZ001S
JZSP-CHI9-1
ghezza
1,5 m
3 m
5 m
10 m
15 m
20 m
3 m
5 m
10 m
–
–
–
1 m
2 m
3 m
1m
2m
–
(cont’d)
Aspetto Produt-
tore
Omron
Yaskawa
Motion
Control,
*4
BV.
30
Page 33

Nome Specifiche Tipo Lun-
Cavo per
comunicazioni
MECHATROLINK-II
Cavo con connettori ad ambo
le estremità*
6
(senza nucleo
di ferrite)
Cavo con connettori ad ambo
le estremità
(con nucleo
di ferrite)
*6
JEPMC-W6002-
JEPMC-W6002--E
(conforme alle Direttive
RoHS)
JEPMC-W6003-
JEPMC-W6003(conforme alle Direttive
RoHS)
∗7
*7
∗7
*7
-E
Terminazioni JEPMC-W6022
JEPMC-W6022-E
(conforme alle Direttive
RoHS)
Cavo per
personal
computer
Cavi JZSP-CPS00-02
ghezza
–
–
–
–
–
–
2 m
3.4 Cablaggio circuito principale
(cont’d)
Aspetto Produt-
tore
Omron
Ya s k aw a
Motion
Control
*4
BV.
Strumento J-FAT-OT
Ventola di raffreddamento JZSP-CHF08-01
per SERVOPACK
–
–
SJDE-04ANA-OY
JZSP-CHF08-02
per SERVOPACK
–
SJDE-08ANA-OY
Nota: Contattare il produttore per ulteriori dettagli quali il diametro esterno.
* 1. I connettori per CNB, CN1 e CN2 non vengono forniti in dotazione con il SERVOPACK. I connettori
per l'estremità del servomotore non vengono forniti in dotazione con il servomotore. Tali connettori
devono essere acquistati separatamente.
* 2. Fare riferimento alle pagine che forniscono i dettagli per il tipo di strumento a crimpare utilizzabile.
Lo strumento a crimpare deve essere ordinato a parte.
* 3. Con uno strumento di apertura (leva per filo)
* 4. Omron Yaskawa Motion Control BV.URL: http://www.omronyaskawa.com
* 5. J.S.t.Mfg co., Ltd. URL: http://www.jst-mfg.com
* 6. La lunghezza totale del cavo deve essere di 50 m massimo e la lunghezza del cavo tra stazioni 0,5 m minimo.
* 7. Specificare la lunghezza del cavo in durante l'ordinazione, come indicato nella tabella seguente .
Lunghezza cavo m
A5 0,5 (1,64)
01 1 (3,28)
03 3 (9,84)
05 5 (16,4)
07 7 (30,0)
Lunghezza cavo m
10 10 (32,8)
20 20 (65,6)
30 30 (98,4)
40 40 (131)
50 50 (164)
31
Page 34

3.4 Cablaggio circuito principale
3.4.2
Cablaggio connettore per il modulo di alimentazione/
rigenerazione (CNA)
ATTENZIONE
• Durante il cablaggio del connettore del circuito principale, osservare le seguenti precauzioni.
• Rimuovere il connettore dal SERVOPACK prima di eseguire il cablaggio.
• Inserire solo un filo per terminale sul connettore.
• Accertarsi che il filo esposto non vada in cortocircuito con i fili adiacenti.
Attenersi alla seguente procedura quando si collega il SERVOPACK al connettore di tipo a molla per
il modulo di alimentazione/rigenerazione.
1. Rimuovere il connettore dal SERVOPACK.
Accertarsi di rimuovere il connettore dal SERVOPACK durante il cablaggio.
2. Scoprire il rivestimento esterno.
Raddrizzare il filo esposto con le dita per evitare lo svolgimento dei fili.
Da 9 a 10 mm
3. Aprire il terminale del filo sulla custodia del connettore di alimentazione (spina) con lo strumento
(leva per cablaggio) utilizzando la procedura riportata nella figura A o B.
• Inserire l'estremità del gancio di collegamento dello strumento fornito nello slot come indicato nella
figura A.
Lo strumento deve essere acquistato dal cliente.
• Utilizzare un cacciavite a taglio standard (con una larghezza della lama pari a 2,5 ... 3,0 mm). Inserire
la lama nello slot, come indicato nella fig. B, e premere con decisione per aprire il terminale del filo.
È possibile utilizzare indistintamente la procedura riportata nella fig. A o B per aprire l'apertura per
l'inserimento del filo.
Fig. A Fig. B
Tipo di strumento: J-FAT-OT
(J.S.T. Mfg Co., Ltd.)
4. Inserire il filo esposto nell'apertura.
Inserire il filo esposto nell'apertura e, quindi, chiudere l'apertura rilasciando il gancio dello strumento
o rimuovendo il cacciavite.
Dimensione filo
Caratteristiche Dimensione filo
Dimensioni
conduttore
Diametro guaina
Cavo
intrecciato
Filo singolo
AWG1 4 … AWG22
φ1,6 mm … φ0,65 mm
φ3,8 mm … φ1,7 mm
32
Page 35

5. Collegare il connettore al SERVOPACK.
Una volta cablato il connettore, collegarlo al SERVOPACK.
Alimentazione
monofase, 200 Vc.a.
L2 L1
Dispositivo sezionamento
Filtro antidisturbo
Contattore magnetico
Reattanza c.a.
FusibileFusibile
A
Modulo di rigenerazione
+(Y3)
-
Y4
Y5
C1
C2
Quando si verificano allarmi quali quelli di
disconnessione della resistenza di rigenerazione,
di guasto dei transistor di rigenerazione (Tr) e di
sovratensione, il contatto tra i terminali C1 e C2 viene
aperto. Utilizzare tale segnale di contatto per disattivare
l'alimentazione
N
4321
del
SERVOPACK
3.4 Cablaggio circuito principale
OMRON-YASKAWA
200 V
SERVOPACK
SJDE
- 04ANA
COM
ALM
RDY
4
5
3
6
2
7
1
8
0
9
FIL
F
A
E
B
D
C
CN6
A/B
CN1
CN2
PWR
U
L1
V
L2
W
CNBCNA
Connettore CNA
1
Connettore modulo di alimentazione/rigenerazione
JZSP-CHG9-1
2
(fornito con il Servopack)
3
4
.
Nota: 1. Tirare leggermente i fili per verificare che siano collegati saldamente.
2. Accertarsi che nessuna delle guaine isolanti dei fili sia rimasta impigliata nelle molle.
Connettore per modulo di alimentazione/rigenerazione (CNA)
Numero
Simbolo Nome segnale
pin
1L1
2L2
3+
4–
Terminali di ingresso
alimentazione
Terminali di collegamento
modulo di rigenerazione
33
Page 36

3.4 Cablaggio circuito principale
3.4.3 Cablaggio connettore per il cavo di potenza del servomotore
(CNB)
Cablare il connettore per il cavo di potenza del servomotore (CNB) in modo analogo al connettore per
il modulo di alimentazione/rigenerazione (CNA). Fare riferimento a 3.4.2 Cablaggio connettore per il
modulo di alimentazione/rigenerazione (CNA) per i dettagli e la procedura.
Controllore
A una distanza di 300 mm
o superiore
Alimentazione
IMPORTANTE
• La distanza tra il cavo di potenza del servomotore e il cavo dell'encoder e tra il cavo di I/O
e il cavo MECHATROLINK-II è di 300 mm o superiore.
• Non raccogliere o far passare il cavo di potenza del servomotore nello stesso condotto
degli altri cavi.
• Accertarsi che la lunghezza massima del cablaggio del cavo di potenza del servomotore sia 20 m.
34
Page 37

3.4 Cablaggio circuito principale
3
6
(
)
Servomotori senza freno
Connettore per cavo
di potenza servomotore
JZSP-CHG9-1
(fornito con il servopack).
1
Connettore fornito con
il cavo di potenza del servomotore
Rosso
Bianco
Blu
Verde/Giallo
Resistenza
Fase U
Fase V
Fase W
FG
1
2
3
4
5
6
Cavo di potenza
servomotore
(per relè)
Verde/Giallo
Nota: Confermare anche i numeri di pin sul connettore.
Schema dei collegamenti per il cavo di potenza del servomotore standard
Di seguito viene illustrato lo schema dei collegamenti per il cavo standard (cavo JZSP-CHM000-
con connettori su entrambe le estremità). Se il cavo di potenza del servomotore viene preparato dal
cliente, fare riferimento allo schema seguente e cablare il cavo correttamente.
Estremità motore
L
Estremità SERVOPACK
50 mm
1
2
2
34
3
4
Connettore CNB
Connettore (tipo a crimpare)
Presa: 5557-06R-210
Terminale: 5556T (catena)
o 5556TL (fili sciolti)
(Molex Japan Co., Ltd.)
Connettore estremità servomotore
visto dal lato di inserimento del cavo
Terminale a crimpare M4
Connettore (tipo a crimpare)
Presa: F32FSS-04V-KY
Contatto presa: SF3F-01GF-P2.0 o SF3F-41GF-P2.0
(JST. Mfg. Co., Ltd.)
Connettore estremità SERVOPACK
(visto dal lato di inserimento del cavo)
14
Numero pin
1
2
3
4
5
6
Fase U
Fase V
Fase W
FG
–
–
Colore filoNome segnale
Rosso
Bianco
Blu
Verde/Giallo
–
–
Cavo schermato
1
2
3
4
Terminale a crimpare
Fase U
Fase V
Fase W
–
FG
∗
Colore filoNome segnaleNumero pin
Rosso
Bianco
Blu
–
Verde/Giallo
∗: Collegare il pin FG al terminale di messa a terra del SERVOPACK.
35
Page 38

3.4 Cablaggio circuito principale
Servomotori con freno
Connettore per cavo
di potenza servomotore
JZSP-CHG9-1
(fornito con il servopack).
Connettore fornito con
il cavo di potenza del servomotore
Fase U
Rosso
Fase V
Bianco
Fase W
Blu
Nero
Nero
FG
Freno
Freno
Cavo di potenza servomotore
(per relè)
Verde/Giallo
Motore
Nota: 1. È necessario predisporre un'alimentazione da 24 Vc.c.
2. Collegare il varistore parallelamente al terminale di alimentazione da 24 Vc.c. e al terminale GND per eliminare la sovratensione causata dall'attivazione e disattivazione del
freno di stazionamento.
3. Confermare anche i numeri di pin sul connettore.
4. Se si utilizza il servomotore per azionare un asse verticale, prevedere un circuito
per attivare e disattivare il freno di stazionamento, in modo che la sezione mobile non
si abbassi a causa della gravità quando si disattiva l'alimentazione del SERVOPACK.
5. Attivare e disattivare il freno di stazionamento sul lato secondario come illustrato nella
figura seguente. È necessario collegare un varistore.
Verde/Giallo
Nero
Nero
1234
1
2
3
4
Varistore
Connettore CNB
Relè
Alimentazione
c.c. a
24 Vc.c.
36
Page 39

3.4 Cablaggio circuito principale
Schema dei collegamenti per il cavo di potenza del servomotore standard
Di seguito viene illustrato lo schema dei collegamenti per il cavo standard (cavo JZSP-CHM030-
con connettori su entrambe le estremità). Se il cavo di potenza del servomotore viene preparato dal
cliente, fare riferimento allo schema seguente e cablare il cavo correttamente.
Estremità motore
Connettore (tipo a crimpare)
Presa: 5557-06R-210
Terminale: 5556T (catena)
o 5556TL (fili sciolti)
(Molex Japan Co., Ltd.)
Connettore servomotore
(visto dal lato di inserimento del cavo)
L 50 mm
Terminale a crimpare M4
Connettore (tipo a crimpare)
Presa: F32FSS-04V-KY
Contatto presa: SF3F-01GF-P2.0 o SF3F-41GF-P2.0
(J.S.T. Mfg. Co., Ltd.)
456
Numero pin
1
2
3
4
5
6
123
Nome segnale
Fase U
Fase V
Fase W
FG
Fren o
Fren o
Colore filo
Rosso
Bianco
Blu
Verde/Giallo
Nero
Nero
Cavo schermato
∗1: Collegare il pin FG al terminale di messa a terra del SERVOPACK.
∗2: Nessuna polarità per il collegamento al freno.
Estremità SERVOPACK
Connettore estremità SERVOPACK
(visto dal lato di inserimento del cavo)
14
1
2
3
4
Nome segnale
Fase U
Fase V
Fase W
–
∗1
FG
∗2
Freno
∗2
Freno
Verde/Giallo
Numero pin
Terminale a crimpare
Terminale a crimpare
Terminale a crimpare
Colore filo
Rosso
Bianco
Blu
–
Nero
Nero
37
Page 40

3.4 Cablaggio circuito principale
3.4.4 Cablaggio connettore encoder (CN2)
Controllore
A una distanza
di 300 mm
o superiore
Alimentazione
IMPORTANTE
• Posizionare il cavo dell'encoder ad una distanza di almeno 300 mm dalle linee di alimentazione
(ovvero, linee ad alta tensione quali la linea di alimentazione e il cavo di potenza del servomotore).
• Non rinchiudere o far passare il cavo dell'encoder nello stesso condotto delle linee di alimentazione.
• Accertarsi che la lunghezza massima del cablaggio del cavo dell'encoder sia 20 m.
Schema dei collegamenti per il cavo dell'encoder standard
Di seguito viene illustrato lo schema dei collegamenti per il cavo standard (cavo JZSP-CHP800-
con connettori su entrambe le estremità). Se il cavo dell'encoder viene preparato dal cliente,
fare riferimento allo schema seguente e cablare il cavo correttamente.
Fili applicabili
Estremità SERVOPACK
Tipo a crimpare (grigio)
Set copertura cavo e spina: 54599-1005
Custodia spina: 51209-1001
Terminali a crimpare: 59351-8087 (catena)
o 59351-8187 (fili sciolti)
(Molex)
Connettore estremità SERVOPACK
T (visto dal lato saldato)
97531
246810
Numero pin
1
2
3
4
5
6
7
8
9
10
Guscio
Nome segnale
PG5V
PG0V(GND)
Fase A (+)
Fase A (–)
Fase B (+)
Fase B (–)
Fase /Z
Fase U
Fase V
Fase W
–
Colore filo
Rosso
Nero
Blu
Blu/Bianco
Giallo
Giallo/Bianco
Porpora
Grigio
Verde
Arancione
Schermatura
Nota: Confermare anche i numeri di pin sul connettore.
Estremità motore
Tipo a saldare (nero)
Kit guscio 36310-3200-008
Presa: 36210-0100FD (3M)
Filo schermato
38
Per alimentazione encoder: AWG22 (0,33 mm
Per altri fili di segnale: AWG26 (0,12 mm
Diametro di chiusura del cavo: φ9 mm max.
Presa: 5557-12R-210
Terminali: 5556T2 (catena)
o 5556T2L (fili sciolti)
(Molex)
Connettore estremità servomotore
(visto dal lato di inserimento del cavo)
12 11 10 8 79
654321
Numero pin
1
2
3
4
5
6
7
8
9
10
11
12
Nome segnale
PG5V
PG0V(GND)
Fase A (+)
Fase A (–)
Fase B (+)
Fase B (–)
Fase /Z
Fase U
Fase V
Fase W
–
FG
Colore filo
Rosso
Nero
Blu/Bianco
Giallo
Giallo/Bianco
Porpora
Grigio
Verde
Arancione
Schermatura
Blu
–
2
)
2
)
Page 41

3.4 Cablaggio circuito principale
3.4.5 Cablaggio del connettore del segnale di I/O (CN1)
Controllore
A una distanza
di 300 mm
o superiore
Alimentazione
Nota: Non tirare o esercitare una forza eccessiva sul cavo. Danni al cavo o ai connettori
potrebbero causare un arresto o un malfunzionamento del prodotto.
IMPORTANTE
• Posizionare il cavo di I/O ad una distanza di almeno 300 mm dalle linee di alimentazione (ovvero,
linee ad alta tensione quali la linea di alimentazione e il cavo di potenza del servomotore).
• Accertarsi che la lunghezza massima del cablaggio del cavo di I/O sia 3 m.
Schema dei collegamenti per il cavo di I/O standard (fornito da OYMC)
Di seguito viene illustrato lo schema dei collegamenti per il cavo standard (cavo JZSP-CHI003-
con connettore). Se il cavo di I/O viene preparato dal cliente, fare riferimento allo schema seguente
e cablare il cavo correttamente.
Spina (14P) 10114-6000EL
Kit guscio 10314-52A0-008
3M
Connettore SERVOPACK (spina)
(visto dal lato saldato)
8 9 10 11 13 1412
5432761
Numero
Guscio
I/O Codice Nome segnale Colore filo Tacca
pin
1
Ingresso:
2
Ingresso:
3
Ingresso:
4
Ingresso:
5
Ingresso:
6
Ingresso:
7 Uscita SG-COM Messa a terra segnale
8 Rosso
9 Rosa Nero
10 Rosso
11 Arancione 2 Nero
12 Uscita ALM Allarme servoazionamento Rosso
13 Uscita /BK Freno Grigio
14 Rosso
/EXT1 Latch esterno Arancione 1 Nero
/DEC Decelerazione di diretto Rosso
N-OT Marcia indietro inibita Grigio
P-OT1 Marcia avanti inibita Rosso
+24VIN Alimentazione di ingresso
E-STP Arresto di emergenza Rosso
––
39
Fili applicabili:
(φ5.6)
AWG24 (0,2 mm
AWG26 (0,12 mm
AWG28 (0,08 mm
esterna
di uscita
FG
Estremità controllore Estremità SERVOPACK
2
)
2
)
2
)
Numero Colore
chiaro
Bianco Nero
Giallo Nero
chiaro
––
Nero
Nero
Page 42

3.4 Cablaggio circuito principale
d
Nota: Confermare anche i numeri di pin presenti sul connettore.
Schema dei collegamenti e descrizione dei cavi di controllo per uso generico
(R7A-CPZ@@@S) forniti da OMRON.
Un cavo di controllo per uso generico viene collegato al connettore I/O di controllo del Servoazionamento (CN1). Non vi sono connettori dal lato controllore. Se si effettua un collegamento a un modulo
di posizionamento senza che sia disponibile un cavo compatibile o se l'azionamento viene collegato
a un controllore prodotto da un'altra società, cablare un connettore adatto per il controllore.
Modelli di cavi
Modello Lunghezza (L) Diametro esterno
R7A-CPZ001S 1 m
R7A-CPZ002S 2 m
del cavo
5,6 mm Circa 0,1 kg
5,6 mm Circa 0,2 kg
Peso
Configurazione del collegamento e dimensioni
Controller end Servo Driver en
Cablaggio
N° Colore cavo/colore tacca Nome segnale
1 Arancione/Rosso (-)
2 Arancione/Nero (-)
3 Grigio/Rosso (-)
4 Grigio/Nero (-)
5 Bianco/Rosso (-)
6 Giallo/Nero (-)
7 Bianco/Nero (-)
8 Rosa/Rosso (-)
9 Rosa/Nero (-)
10 Arancione/Rosso (--)
11 Arancione/Nero (--)
12 Grigio/Rosso (--)
13 Grigio/Nero (--)
14 Giallo/Rosso (-)
Spina del connettore: 10114-3000VE (Sumitomo 3M)
Calotta del connettore: 10314-52A0-008 (Sumitomo 3M)
I cavi con lo stesso colore e lo stesso numero di tacche sono dei doppini intrecciati.
/EXT1 LATCH esterno
/DEC Decelerazione ricerca
di origine
N-OT Marcia indietro inibita
P-OT Marcia avanti inibita
+24VIN
RUN
OGND
/ALM
BKIR
40
Page 43

Disposizione dei pin del connettore
3.4 Cablaggio circuito principale
2
4
6
1
3
5
7
9
11
13
8
10
12
14
3.4.6 Cablaggio dei connettori per la rete MECHATROLINK-II
(CN6A e CN6B)
Numero di stazioni
Quando si collega un ripetitore, è possibile collegare un massimo di 30 stazioni slave. Il numero massimo di stazioni slave collegabili è determinato dalle impostazioni della rete MECHATROLINK-II. Per
ulteriori informazioni, consultare la sezione 3.8 Impostazione rete MECHATROLINK-II.
Cavi per rete
Utilizzare i cavi specificati nella tabella seguente.
Tipo Modello Lunghezza
Cavo per rete MECHATROLINK
(con connettori su entrambe le estremità, senza nucleo di ferrite)
Cavo per rete MECHATROLINK
(con connettori su entrambe le estremità, con nucleo di ferrite)
Lunghezza cavo
La lunghezza totale del cavo deve essere di 50 m massimo. La lunghezza del cavo tra stazioni deve
essere 0,5 m minimo.
Terminazione
Installare una terminazione sull’ultimo SERVOPACK della rete.
JEPMC-W6002- Specificare la lunghezza
JEPMC-W6002--E
(conforme alle Direttive RoHS)
JEPMC-W6003-
JEPMC-W6003--E
(conforme alle Direttive RoHS)
in . Per informazioni dettagliate, fare riferimento alla
pagina 31.
Tipo con terminazione Tipo con connettore
Terminazione MECHATROLINK-II JEMPC-W6022
JEMPC-W6022-E (conforme alle Direttive RoHS)
41
Page 44

3.4 Cablaggio circuito principale
SERVOPACK SERVOPACK SERVOPACK
L1+L2+···+Ln O 50 m
Lunghezza cavo tra stazioni: 0,5 m min.
Numero massimo di slave: 30 (con ripetitori collegati)
modulo di posizionamento
serie CJ1
CJ1W-NCF71
LnL1 L2
Terminazione
IMPORTANTE
Mantenere una distanza di almeno 300 mm tra le linee di alimentazione (circuito ad alta
tensione quale la linea di alimentazione e il cavo di potenza del servomotore) e il cavo
MECHATROLINK-II.
42
Page 45

3.4 Cablaggio circuito principale
3.4.7 Cablaggio del connettore del personal computer (CN9)
Predisporre il cavo specificato per collegare il SERVOPACK a un personal computer.
Cavo per comunicazioni
Utilizzare i cavi a doppini intrecciati e a doppini intrecciati schermati specificati.
Tipo Modello Lunghezza
Cavo personal
computer
JZSP-CPS00-02
Fili applicabili (fili in rame con rivestimento in stagno)
Dimensioni
conduttore
(configurazione
filo esposto)
AWG24 (0,16 mm)
AWG26 (0,16 mm)
AWG28 (0,127 mm)
Diametro esterno
guaina
φ0,9 … φ1,45 mm
Fili consigliati
UL1061 e UL1007
Configurazione cavo
Rimuovere la guaina di 1,7 … 2,3 mm dalla configurazione del cavo.
Formato cavo
Connettore D-sub
17JE-13090-02 (D8A)
Prodotto da DDK, Ltd.
Cavo
2 m
Connettore
Spina: DF11-4DS-2C
Terminali: DF11-2428SCF
Prodotto da Hirose Electric Co., Ltd.
Etichetta
Viti 2 × M2.6
Caratteristiche del connettore
Lato
SERVOPACK SJDE
Segnale Numero pin Numero pin Segnale
/TXD 1 2 RXD
/RXD 2 3 TXD
GND 3 5 GND
GND 4 7 RTS
Tubetto termoregistrente
Cavo schermato
43
DOS/V (PC/AT compatibile)
estremità personal computer
(D-SUB a 9 pin)
8 CTS
Case FG
Page 46

3.5 Esempi di collegamento del segnale di ingresso
3.5 Esempi di collegamento del segnale di ingresso
Esempi di collegamento
La corrente di ingresso è pari a 7 mA per punto.
Alimenta-
zione
a 24 Vc.c.
AVR 2
+24V 0 V
IMPORTANTE
Controllore SERVOPACK
24 VIN
/EXT1
Arresto di
emergenza
Filo schermato
E-STP
/DEC
N-OT
P-OT
CN1
5
1
2
3
4
6
Fotoaccoppiatore
3,3 kΩ
3,3 kΩ
3,3 kΩ
3,3 kΩ
3,3 kΩ
∗ Fili a doppini intrecciati
Predisporre un'alimentazione a 24 Vc.c. esterna. L'alimentazione a 24 Vc.c. non viene
fornita dal SERVOPACK.
• Specifiche dell'alimentazione esterna per i segnali di ingresso sequenza.
24 Vc.c. ± 1 V, 50 mA min.
È necessario utilizzare la stessa alimentazione del circuito di uscita.
44
Page 47

3.6 Esempio di collegamento del segnale di uscita
3.6 Esempio di collegamento del segnale di uscita
Impostare il carico in modo che la corrente di uscita sia 50 mA o inferiore.
Uscita fotoaccoppiatore (per segnale di uscita)
Tensione massima: 30 Vc.c.
Corrente max.: 50 m ADC
Alimentazione
Carico
24 Vc.c.
+24V 0 V
SERVOPACK
CN1
12
ALM
13
7
/BK
SG-COM
Carico
45
Page 48

3.7 Segnali di I/O
3.7 Segnali di I/O
3.7.1 Ingresso segnale di decelerazione per la ricerca dell’origine
Di seguito viene illustrato il collegamento per il segnale di decelerazione per la ricerca dell’origine/DEC.
Un segnale di decelerazione è attivato quando viene utilizzata la funzione di ricerca di origine
(comando ZRET) tramite rete MECHATROLINK II.
Alimentazione
a 24 Vc.c.
24 V
+24VIN
/DEC
0 V
Nome segnale Segnale Funzione
Ingresso segnale
di decelerazione per
la ricerca di origine
/DEC ON (livello basso) Il segnale si attiva.
OFF (livello alto) Il segnale si disattiva.
3.7.2 Ingresso segnale di latch esterno
Di seguito viene illustrato il collegamento per l'ingresso del segnale di latch /EXT1. Tale segnale
di ingresso viene utilizzato per le funzioni di ricerca di origine (comando ZRET) e di posizionamento
esterno (EX_POSING) tramite rete MECHATROLINK-II.
Alimentazione
a 24 Vc.c.
24 V
+24VIN
CN1-5
CN1-2
CN1-5
SERVOPACK
3,3 kΩ
7 mA
SERVOPACK
Fotoaccoppiatore
Fotoaccoppiatore
CN1-1
/EXT1
0 V
Nome segnale Segnale Funzione
Ingresso segnale di
latch esterno
/EXT1 ON (livello basso) Il segnale esterno è ON.
OFF (livello alto) Il segnale esterno è OFF.
3,3 kΩ
46
7 mA
Page 49

3.7 Segnali di I/O
3.7.3 Ingresso segnale arresto di emergenza
Di seguito viene illustrato il collegamento per l'ingresso del segnale di arresto di emergenza E-STP.
Quando il segnale si attiva mentre il servomotore ruota, quest'ultimo viene arrestato mediante
frenatura dinamica.
AVVERTENZA
• Utilizzare l'ingresso del segnale di arresto di emergenza E-STP per forzare la disattivazione
del servoazionamento da una sequenza esterna, quale un controllore, in caso di allarme del servo
o di arresto di emergenza del sistema.
La tensione residua fa ruotare il servomotore per alcuni secondi dopo la disattivazione dell'alimentazione e può essere causa di lesioni o danni alle apparecchiature. Accertarsi di arrestare completamente il motore disattivando il servo tramite l'arresto di emergenza.
• Quando si esegue la funzione di JOG e la funzione di ricerca di origine utilizzando CX-Drive,
il segnale E-STP verrà ignorato. È necessario adottare contromisure alternative nel caso sia
richiesto un arresto di emergenza.
Nota: Nel caso del segnale di arresto di emergenza, l'elaborazione del SERVOPACK per l'arresto viene
eseguita dal software. Poiché è possibile che le caratteristiche di sicurezza di alcune applicazioni non
soddisfino i requisiti di sicurezza locali, aggiungere circuiti di sicurezza esterni in base alle necessità.
Alimentazione
a 24 Vc.c.
24 V
0 V
+24VIN
Arresto di emergenza
E-STP
CN1-5
CN1-6
SERVOPACK
Fotoaccoppiatore
3,3 kΩ
7 mA
Nome segnale Segnale Funzione
Ingresso segnale
arresto di
emergenza
• L'avviso 1 (A.95A) si verifica se viene inviato un comando SV_ON mentre il SERVOPACK si trova nello
stato di arresto di emergenza.
• L'allarme di arresto di emergenza (A.280) si verifica se si attiva il segnale di arresto di emergenza
mentre viene fornita alimentazione al servomotore.
E-STP ON (livello basso) Rilascia l'arresto di emergenza.
OFF (livello alto) Arresto di emergenza
(servoazionamento forzato OFF)
47
Page 50

3.7 Segnali di I/O
Sequenza in caso di arresto di emergenza
AVVERTENZA
• Configurare l'alimentazione del circuito in modo che venga automaticamente interrotta nel caso
in cui il segnale E-STP si disattivi in seguito a un arresto di emergenza.
La tensione residua fa ruotare il servomotore per alcuni secondi dopo la disattivazione
dell'alimentazione e può essere causa di lesioni o danni alle apparecchiature.
Le informazioni sulla posizione non vengono memorizzate nel SERVOPACK, pertanto andranno
perse in caso di disattivazione dell'alimentazione. Non sarà possibile leggere nuovamente tali
informazioni in caso di disattivazione dell'alimentazione.
IMPORTANTE
Impostare il seguente parametro per disattivare il segnale di ingresso di arresto di emergenza solo
se assolutamente necessario.
• Non avviare o arrestare frequentemente il servomotore attivando o disattivando l'alimentazione o utilizzando il segnale servo ON (SV-ON) o servo OFF (SV-OFF). La mancata osservanza di questa avvertenza causa il deterioramento dei componenti interni del SERVOPACK.
Alimentazione
monofase, 200 Vc.a. … 230 Vc.a.
50/60 Hz
L2
L1
Filtro antidisturbo
Alimentazione
servo
ON
24 Vc.c.
MC1
Alimentazione
servo
OFF
MC1
MC1
Arresto di emergenza
Arresto di
emergenza
SERVOPACK
CNA
1 (L1)
2 (L2)
CN1
5 (+24 VIN)
6 (E-STP)
MC1
SUP
Parametro Descrizioni
Pn 515 n.4 Arresto di emergenza quando il segnale di ingresso CN1-6 è OFF
n.8 Impostare sempre il segnale di ingresso ON per disattivare l'arresto
(livello H) (impostazione di fabbrica)
di emergenza.
48
Page 51

3.7 Segnali di I/O
3.7.4 Ingressi marcia avanti/indietro inibita (ingressi extracorsa)
AVVERTENZA
• Quando si esegue la funzione di JOG e la funzione di ricerca di origine utilizzando CX-Drive, i segnali
P-OT e N-OT verranno ignorati. È necessario adottare contromisure alternative in caso di extracorsa.
Di seguito viene illustrato il collegamento per gli ingressi marcia avanti/indietro inibita P-OT e N-OT.
Collegare tali segnali ai finecorsa per forzare l'arresto del servomotore quando la parte mobile della
macchina supera la gamma di movimento consentita. Il servomotore decelera fino all'arresto e, quindi,
viene eseguita la funzione di zero clamp. La coppia massima durante la decelerazione fino all'arresto
sarà la coppia massima del servomotore.
Nota: Nel caso degli ingressi di marcia avanti/indietro inibita, l'elaborazione del SERVOPACK per l'arresto
viene eseguita dal software. Poiché è possibile che le caratteristiche di sicurezza di alcune applicazioni
non soddisfino i requisiti di sicurezza locali, aggiungere circuiti di sicurezza esterni in base alle
necessità.
Alimentazione
a 24 Vc.c.
24 V
0 V
0 V
+24 VIN
P-OT
N-OT
SERVOPACK
CN1-5
3,3 kΩ
CN1-4
7 mA
3,3 kΩ
CN1-3
7 mA
Fotoaccoppiatore
Fotoaccoppiatore
Nome segnale Segnale Funzione
Ingresso marcia
avanti inibita
P-OT
ON a livello basso (L) Marcia avanti consentita
OFF a livello alto (H) Marcia avanti inibita
Ingresso marcia
N-OT
ON a livello basso (L) Marcia indietro consentita
indietro inibita
OFF a livello alto (H) Marcia indietro inibita
Parametri correlati
Parametro Descrizioni
Pn.50A
Pn.50B
n.2
n.8
n.4
n.4
Marcia avanti consentita quando il segnale di ingresso CN1-4 è ON
(livello basso)
Marcia avanti consentita sempre
Marcia indietro consentita quando il segnale di ingresso CN1-3 è ON
(livello basso)
Marcia indietro consentita sempre
49
(stato normale)
(è consentita la marcia indietro)
(stato normale)
(è consentita la marcia avanti)
Page 52

3.7 Segnali di I/O
3.7.5 Uscita di allarme del servoazionamento
Di seguito viene illustrato il collegamento per i segnali di uscita correlati agli allarmi.
Tali segnali vengono emessi quando il SERVOPACK rileva un errore.
SERVOPACK
Uscita fotoaccoppiatore
Tensione di funzionamento
max.: 30 Vc.c. per uscita
Corrente di uscita max.:
50 mA c.c. per uscita
Fotoaccoppiatore
50 mA max.
CN1-12
CN1-7
ALM
SG-COM
È necessario collegare esternamente un'alimentazione a 24 Vc.c.
Nome segnale Segnale/Significato Funzione
Uscite di allarme
servoazionamento
Nota: Le uscite a collettore aperto vengono utilizzate per i segnali di uscita.
• Quando si verifica un allarme, viene inviato un codice allarme al controllore attraverso la rete
MECHATROLINK-II. Accertarsi che l'alimentazione del SERVOPACK non sia disattivata quando
viene attivato il segnale di uscita di allarme.
• Configurare il sistema in modo che l'alimentazione del SERVOPACK sia disattivata dal segnale
di contatto tra C1 e C2 del modulo di rigenerazione o il segnale del termostato sulla resistenza
esterna.
Quando si utilizza l'arresto di emergenza del sistema, l'alimentazione deve essere disattivata
e il segnale di ingresso di arresto di emergenza deve essere aperto.
ALM Uscita di allarme del
servoazionamento
SG-COM Messa a terra segnale
di uscita
Stato normale quando ON (chiuso)
Uscita allarme quando OFF (aperto)
Alimentatore a 24 Vc.c.
+24V
0 V
3.7.6 Uscita di interLATCH freni
Di seguito viene illustrato il collegamento per il segnale di interLATCH freni /BK.
Tali segnali si attivano quando viene attivato il servo e si disattivano quando invece viene disattivato.
Vengono utilizzati per controllare il freno. È, inoltre, possibile sbloccare il freno inviando un comando
di rilascio del freno (BRK_OFF) mediante l'uso della rete MECHATROLINK-II.
SERVOPACK
Uscita fotoaccoppiatore
Tensione di funzionamento
max.: 30 Vc.c. per uscita
Corrente di uscita max.:
50 mA c.c.
Fotoaccoppiatore
CN1-13
50 mA max.
CN1-7
/BK
SG-COM
Nome segnale Segnale/Significato Funzione
Uscita interLATCH
freno
/BK Uscita di interLATCH freni Sblocca il freno quando ON (chiuso)
SG-COM Messa a terra segnale
Applica il freno quando OFF (aperto)
di uscita
50
Alimentatore a 24 Vc.c.
+24V
0 V
Page 53

Temporizzazione segnale /BK
Quando il servo viene disattivato mentre il servomotore è in stop.
Comando servo OFF
(SV_OFF)
Freno (/BK)
Servoazionamento
ON
Servoazionamento OFF
Freno ONFreno OFF
3.7 Segnali di I/O
Potenza motore
Potenza motore ON
Potenza motore OFF
Circa 130 ms
Quando il servo viene disattivato mentre il servomotore è in marcia.
Comando servo OFF
(SV_OFF)
Velocità motore
–1
)
(min
Circa 100 min
Freno (/BK)
Condizioni di uscita del segnale /BK durante la rotazione del servomotore
Il segnale /BK si attiva quando si verifica una delle seguenti condizioni.
· La velocità del servomotore diminuisce fino a un valore di 100 min–1 o inferiore una volta disattivato il servo.
Si verifica un intervallo di 500 ms dalla disattivazione del servo.
·
Servoazionamento
ON
–1
Servoazionamento OFF
Freno ONFreno OFF
Circa 500 ms
51
Page 54

3.8 Impostazione rete MECHATROLINK-II
3.8 Impostazione rete MECHATROLINK-II
3.8.1 Comunicazioni MECHATROLINK-II
Profilo
MECHATROLINK-II è una rete ad alta velocità che consente a un controllore (stazione master C1)
di controllare più dispositivi decentralizzati (stazioni slave), quali servoazionamenti, inverter e Moduli di I/O.
Configurazione
• Collegamento tramite bus con una stazione master C1 e un massimo di 30 stazioni slave
• Installare terminazioni su entrambe le estremità della rete.
• Collegare ripetitori per una rete con una distanza totale superiore ai 30 m, indipendentemente
dal fatto che il numero di slave sia pari o superiore a 17 oppure pari o inferiore a 16.
Stazione
master C1
(controllore FA)
Stazione slave
(dispositivo FA)
#1 #2 #30
Stazione slave
(dispositivo FA)
Stazione slave
(dispositivo FA)
3.8.2 Specifiche per il cablaggio
Terminazioni
Installare terminazioni su entrambe le estremità della rete; alcuni controllori Mechatrolink dispongono
già di una resistenza di terminazione integrata.
Modello Aspetto esterno
JEPMC-W6022
JEPMC-W6022-E
(conforme alle
Direttive RoHS)
Ripetitori
Quando la distanza totale tra le stazioni supera i 30 m oppure il numero di stazioni slave è pari
o superiore a 17, la rete necessita di un ripetitore.
Tipo Aspetto esterno
JEPMC-REP2000
52
Page 55

Esempio di collegamento di un ripetitore
Distanza rete lato master
3.8 Impostazione rete MECHATROLINK-II
Distanza totale
Distanza estesa totale
Stazione
master C1
Stazione
slave
#1
Rete lato master Rete estesa
Stazione
slave
#m
Ripetitore
Stazione
slave
#m+1
Stazione
slave
#n-1
Stazione
slave
3.8.3 Impostazione delle specifiche di comunicazione
Impostazione byte di trasmissione
L'interruttore 2 di SW2 imposta i byte di trasmissione MECHATROLINK-II come indicato di seguito.
Le impostazioni modificate vengono rese effettive alla prima riattivazione dell'alimentazione.
4
5
3
6
2
7
1
8
0
9
A
F
B
E
C
D
SW1
(impostazione di fabbrica)
SW2 Nome Imposta-
Bit 1 Riservati
Bit 2 Byte di trasmissione
Bit 3 Indirizzo stazione
Bit 4 Selezione del metodo
di impostazione del filtro
ON
OFF
1234
SW2
(impostazione di fabbrica)
zione
OFF
ON
OFF
ON
OFF
ON
OFF
ON
Non impostare
Fisso
17 byte
32 byte
Indirizzo stazione = 40H+SW1
Indirizzo stazione = 50H+SW1
Effettua l'impostazione utilizzando
il selettore rotativo FIL (impostazione
non valida con Pn00A).
Effettua l'impostazione tramite Pn00A
(impostazione non valida se si utilizza
il selettore rotativo FIL).
Descrizione Impostazione
di fabbrica
#n
ON
ON
OFF
OFF
Impostazione dell'indirizzo di stazione
Gli interruttori SW1 e bit 3 di SW2 impostano l'indirizzo della stazione MECHATROLINK-II.
Bit 3 di SW2 Indirizzo stazione
OFF 40H + SW1
ON 50H + SW1
53
Page 56

3.8 Impostazione rete MECHATROLINK-II
3.8.4 Ciclo di trasmissione e numero di stazioni
Di seguito vengono riportati il ciclo di trasmissione e il numero di stazioni che possono essere
impostati con il SERVOPACK.
Byte di trasmissione Ciclo di trasmissione
1,0 ms
17 14
32 8
Nota: 1. Se si collegano più di 16 stazioni, utilizzare il ripetitore.
2. Il numero di stazioni indicato nella tabella precedente rappresenta il numero massimo di stazioni
che possono essere collegate tramite la rete MECHATROLINK-II. Il numero effettivo di stazioni
può differire in base all'unità di controllo. Fare riferimento al manuale relativo all'unità di controllo.
1,5 ms 2,0 ms 3,0 ms 4,0 ms
23 30 30 30
14 20 30 30
3.8.5 Indicatore di stato della rete MECHATROLINK-II LED COM
L'indicatore LED COM (verde) sul lato anteriore del SERVOPACK si illumina quando viene stabilita
una comunicazione MECHATROLINK-II con il controllore.
Indicatore LED di stato Stato funzionamento SERVOPACK
Attesa per l’attivazione della comunicazione
COM ALM RDY
2 secondi dopo
l'attivazione
dell'alimentazione
COM ALM RDY
COM
COM ALM RDY
: Spento
: Acceso
: Lampeggiante
La rete MECHATROLINK-II sono occupata.
Stato servo ON (viene fornita l'alimentazione)
54
Page 57

4.1 Elenco comandi
4 Comandi MECHATROLINK-II
4.1 Elenco comandi
4.1.1 Elenco dei comandi principali
I comandi principali MECHATROLINK-II vengono classificati in tre tipi: Comandi comuni, comandi
di movimento comuni e comandi standard del servoazionamento.
Classifi-
cazioni
Comandi
comuni
Comandi
di movimento
comuni
Codice
coman-
do
00H NOP Nessun funziona-
01H PRM_RD Leggi parametro D Asincrono
02H PRM_WR Scrivi parametro D Asincrono
03H ID_RD Leggi ID D Asincrono
04H CONFIG Configura dispo-
05H ALM_RD Leggi allarme
06H ALM_CLR Cancella allarme
0DH SYNC_SET Avvia comunica-
0EH CONNECT Stablisbilisci col-
0FH DISCON-
1CH PPRM_WR Scrivi parametro
20H POS_SET Imposta coordi-
21H BRK_ON Applica freno C Asincrono
22H BRK_OFF Rilascia freno C Asincrono
23H SENS_ON Attiva sensore C Asincrono
24H SENS_OFF Disattiva sensore C Asincrono
25H HOLD Arresta
Nome
comando
NECT
Funzioni Classifica-
mento
sitivo
o avviso
o avviso
zione sincrona
legamento
Rilascia scollega-
mento
memorizzato
nate
movimento
zioni ela-
borazioni
NAsincrono
CAsincrono
DAsincrono
CAsincrono
NAsincrono
NAsincrono
NAsincrono
DAsincrono
DAsincrono
MAsincrono
Classifica-
zioni sincronizza-
zioni
Sottocomando Note
Può essere utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Non può essere
utilizzato
Può essere utilizzato
55
Page 58

4.1 Elenco comandi
Classifi-
cazioni
Comandi
di movimento
comuni
Comandi
standard
servo
<Classificazioni elaborazioni>
N: Comando di rete
D: Comando di comunicazione dati
C: Comando di controllo
M: Comando di movimento
X: Comando combinato
Codice
coman-
do
28H LTMOD_ONRichiedi modalità
29H LTMOD_
30H SMON Monitoraggio
31H SV_ON Servo ON C Asincrono Può essere
32H SV_OFF Servo OFF C Asincrono Può essere
34H INTERPO-
35H POSING Posizionamento M Asincrono Può essere
36H FEED Avanzamento
38H LATCH Avanzamento
39H EX_
3AH ZRET Ricerca di origine M Asincrono Può essere
3EH ADJ Regolazione D Asincrono Non può
Nome
comando
OFF
LATE
POSING
Funzioni Classifica-
di LATCH
Rilascia modalità
di LATCH
stato
Avanzamento
interpolazione
velocità costante
interpolazione
con rilevamento
posizione
Posizionamento
ingresso esterno
zioni elaborazioni
C Asincrono Non può
C Asincrono Non può
D Asincrono Può essere
M Sincrono Può essere
M Asincrono Può essere
M Sincrono Può essere
M Sincrono Può essere
Classifica-
zioni sincronizza-
zioni
Sottocomando Note
essere
utilizzato
essere
utilizzato
utilizzato
utilizzato
utilizzato
utilizzato
utilizzato
utilizzato
utilizzato
utilizzato
utilizzato
essere
utilizzato
IMPORTANTE
Se si riceve un comando non supportato, si attiva il segnale di avviso A.95b e il comando
viene ignorato.
Il servoazionamento non viene disattivato e il servomotore non viene arrestato se si riceve
un comando non supportato.
56
Page 59

4.1.2 Elenco sottocomandi
4.1 Elenco comandi
Codice
comando
00H NOP Nessun funzionamento
01H PRM_RD Leggi parametro
02H PRM_WR Scrivi parametro
05H ALM_RD Leggi allarme o avviso
1CH PPRM_WR Scrivi parametro memorizzato
28H LTMOD_ON Richiedi modalità di LATCH
29H LTMOD_OFF Rilascia modalità di LATCH
30H SMON Monitoraggio stato
Nome comando Funzioni Note
57
Page 60

4.2 Comandi principali
4.2 Comandi principali
Le seguenti sezioni descrivono voci specifiche dei comandi principali univoche per SJDE-ANA-OY.
I comandi principali MECHATROLINK-II utilizzano dal primo al sedicesimo byte del comando e dei
dati di risposta.
4.2.1 Fasi di comunicazione
La tabella mostra il rapporto tra le fasi di comunicazione e le operazioni a livello di dispositivo
nel MECHATROLINK-II durante le normali operazioni. Le fasi della stazione master C1 descritte
di seguito indicano lo stato delle comunicazioni della stazione master C1 rispetto alle stazioni slave,
ma non ne indicano lo stato del dispositivo.
Rapporto tra le fase di comunicazione e il funzionamento a livello di dispositivo
Stazione master C1 Transizione di fase tra la
Fase Operazione
dispositivo
0 Accensione – Accensione 0
Comando Funzionamento
stazione master C1
e le stazioni slave
Stazione slave
dispositivo
Fase
1 Stato di inizializ-
zazione
2, 3 Stato funziona-
mento normale
4 Comunicazione di
funzionamento
5 Spegnimento – Spegnimento 5
CONNECT Predisposto per
Comandi
funzionamento
normale
DISCONNECT
CONNECT
Stato funzionamento normale
Comunicazione
di arresto
1
2, 3
4
58
Page 61

4.2 Comandi principali
Descrizioni
Lo stato delle comunicazioni della stazione master C spiegato in tutte le fasi.
Fase 0
Quando le stazioni master C1 e slave vengono attivate, il funzionamento passa alla fase 1.
Fase 1
La stazione master C1 completa l'inizializzazione interna, compreso il sistema di comunicazione,
e conferma lo stato di risposta di tutte le stazioni slave collegate prive di errori. Quindi, la stazione master
C1 invia un comando CONNECT a tutte le stazioni slave collegate per stabilire la comunicazione.
La stazione slave completa l'inizializzazione interna, compreso il sistema di comunicazione, e, quindi,
attende il comando CONNECT.
La stazione slave stabilisce la comunicazione con la stazione master C1 e passa alla fase specificata
dal comando.
Fase 2 (fase di comunicazione asincrona)
La stazione master C1 utilizza solo comandi asincroni supportati da dispositivi compatibili con
MECHATROLINK-II per scambiare i dati necessari per il funzionamento e il controllo dei dispositivi.
La temporizzazione per l'esecuzione di ciascun comando è controllata dalla stazione master C1.
Le stazioni slave effettuano lo scambio di dati e il controllo dei dispositivi mediante i comandi inviati dalla
stazione master C1. La transizione alla fase 3 o alla fase 4 viene eseguita tramite i comandi dalla stazione
master C1 alle stazioni slave.
Fase 3 (fase di comunicazione sincrona)
La stazione master C1 può utilizzare tutti i comandi supportati da dispositivi compatibili con
MECHATROLINK-II per scambiare i dati necessari per il funzionamento e il controllo dei dispositivi.
Ciascun comando viene aggiornato in un ciclo costante (ciclo di comunicazione) e la relativa
temporizzazione per l'esecuzione viene controllata dalla stazione master C1.
Le stazioni slave effettuano lo scambio di dati e il controllo dei dispositivi mediante i comandi inviati dalla
stazione master C1. Se si verificano errori nella sincronizzazione delle comunicazioni, la stazione slave
passa automaticamente alla fase 2. La comunicazione sincrona viene avviata nuovamente inviando
il comando SYNC_SET dalla stazione master C1.
Fase 4
Se disattivata, la stazione master C1 invia un comando DISCONNECT a tutte le stazioni slave.
Il comando DISCONNECT viene inviato anche alle stazioni slave coinvolte qualora fosse necessario
modificare la configurazione del sistema.
Quando la stazione slave riceve il comando DISCONNECT dalla stazione master C1, esegue
nuovamente l'inizializzazione e passa allo stato di attesa per il collegamento (fase 1).
Fase 5
Quando le stazioni master C1 e slave vengono disattivate, passano alla fase 5. Le due modifiche dello
stato riportate di seguito dipendono da quale stazione viene disattivata per prima.
• Stazione master C1 disattivata per prima
La stazione master C1 invia il comando DISCONNECT a tutte le stazioni slave prima di disattivare
l'alimentazione (sequenza consigliata).
Una stazione slave che riceve tale comando esegue nuovamente l'inizializzazione e, quindi, passa
allo stato di attesa per il collegamento (fase 1).
Quando il comando DISCONNECT non viene inviato o non viene ricevuto dalla stazione slave,
quest'ultima rileva un errore di comunicazione e passa a uno stato di allarme.
• Stazione slave disattivata per prima
Una volta che la stazione master C1 invia il comando DISCONNECT alla stazione slave da disattivare,
l'alimentazione della stazione slave viene disattivata (sequenza consigliata).
La stazione slave che riceve il comando esegue l'inizializzazione necessaria e, quindi, passa allo stato
di attesa per il collegamento (fase 1).
Se una stazione slave viene disattivata senza utilizzare la procedura descritta sopra, la stazione master
C1 rileva un errore di comunicazione.
Le operazioni in stato di allarme e il ripristino dopo lo stato di allarme dipendono dalle caratteristiche
del dispositivo o dell'applicazione.
59
Page 62

4.2 Comandi principali
4.2.2 Nessun funzionamento (NOP: 00H)
Byte NOP Descrizione
Comando Risposta
1 00H 00H
2 − ALARM
3 STATUS • Ripristina gli stati ALM, WARNG e CMDRDY solo per i byte STATUS.
4
5–
6
7
8
9
10
11
12
13
14
15
16 WDT RWDT
17 Per i sotto-
comandi.
18
19
20
21
22
23
24
25
26
27
28
29
Per i sottocomandi.
Classificazioni
elaborazioni
Tempo
di elaborazione
Tutti gli altri bit non vengono utilizzati. La risposta sarà NOP quando
l'alimentazione non viene attivata fino al completamento dell'inizializzazione e, durante, questo periodo, viene ripristinato il seguente stato:
CMDRDY: 0.
• Può essere utilizzato durante qualsiasi fase.
Gruppo
comandi di rete
All'interno
del ciclo
di trasmissione
Classificazioni
sincronizzazioni
Sottocomando Può essere
asincrona
utilizzato
60
Page 63

4.2 Comandi principali
4.2.3 Leggi parametro (PRM_RD: 01H)
Byte PRM_RD Descrizione
Comando Risposta
101H 01H
2 – ALARM Te mp o
3 STATUS • Legge i parametri di funzionamento correnti. Per i parametri non in linea
4
5NA NA
6
7 SIZE SIZE
8–PARAME-
9
10
11
12
13
14
15
16 WDT RWDT
TER
Classificazioni
elaborazioni
di elaborazione
viene, tuttavia, letto l'ultimo valore impostato (il valore impostato viene
abilitato con il comando Setup Device (CONFIG)).
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
Se viene emesso un avviso, PARAMETER non sarà affidabile.
-Se NO non rientra nell'intervallo: Avviso impostazione dati 1 (A.94A)
-Se SIZE non corrisponde: Avviso impostazione dati 4 (A.94D)
• Per informazioni dettagliate su NO e SIZE, fare riferimento a 7.2 Elenco
dei parametri.
Gruppo
comandi
di comunicazione dei dati
100 ms Sottocomando Non può essere
Classificazioni
sincronizzazioni
asincrona
utilizzato
61
Page 64

4.2 Comandi principali
4.2.4 Scrivi parametro (PRM_WR: 02H)
Byte PRM_WR Descrizione
Comando Risposta
1 02H 02H
2 − ALARM Tempo
3 STATUS • Scrive un parametro e non li memorizza nella memoria non volatile.
4
5NO NO
6
7 SIZE SIZE
8 PARAME-
9
10
11
12
13
14
15
16 WDT RWDT
TER
PA R AM E -
TER
Classificazioni
elaborazioni
di elaborazione
Un parametro scritto viene abilitato con la trasmissione del comando
Setup Device (CONFIG) dopo l'impostazione.
• Può essere utilizzato durante le fasi 2 e 3.
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
-Se si modifica il parametro nel mezzo del funzionamento con
CX-Drive: Avviso comando 1 (A.95A)
-Se NO non rientra nell'intervallo: Avviso impostazione dati 1 (A.94A)
-Se SIZE non corrisponde: Avviso impostazione dati 4 (A.94D)
-Se PARAMETER non rientra nell'intervallo: Avviso impostazione
dati 2 (A.94B)
Per informazioni dettagliate su NO, SIZE e PARAMETER, fare riferimento a 7.2 Elenco dei parametri.
Gruppo
comandi
di comunicazione dei dati
100 ms Sottocomando Non può essere
Classificazioni
sincronizzazioni
Asincrono
utilizzato
62
Page 65

4.2 Comandi principali
4.2.5 Leggi ID (ID_RD: 03H)
Byte ID_RD Descrizione
Comando Risposta
103H 03H
2 – ALARM Te mp o
3 STATUS • Legge l'ID. Il DEVICE_CODE corrispondente viene illustrato nella
4
5 DEVICE_
CODE
6 OFFSET OFFSET
7 SIZE SIZE
8 − ID
9
10
11
12
13
14
15
16 WDT RWDT
DEVICE_
CODE
Classificazioni
elaborazioni
di elaborazione
tabella seguente.
Gruppo
comandi
di comunicazione dei dati
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
Dettagli di DEVICE_CODE
Tipo/Nome OFFSET
SERVOPACK Modello
Versione
software
Versione software
encoder
Modello motore
Riservati
Nota: 1. I numeri di modello vengono visualizzati in codice ASCII, con l'ultima sezione contrassegnata come “00”.
2. Gli spazi indicano dati non specificati.
3. Il numero di versione del software dell' encoder è impostato su 00 (binario) e non può essere modificato.
* 1. Uscita nominale.
* 2. Caratteristiche della tensione di alimentazione.
DEVICE_
CODE
00H S J D E
02H Versione
12H Versione
20H *****00
50H
52H
00 01 02 03 04 05 06 07 08 09 0A
∗1∗1∗
NA00
2
63
Page 66

4.2 Comandi principali
4.2.6 Configura dispositivo (CONFIG: 04H)
Byte CONFIG Descrizione
Comando Risposta
1 04H 04H
2– ALARM
3 STATUS • Ricalcola tutti i parametri attualmente impostati e inizializza le posizioni,
4
5–
6
7
8
9
10
11
12
13
14
15
16 WDT RWDT
* +α è l'impostazione del ritardo di disattivazione servoazionamento.
Stato e segnale di uscita durante l'esecuzione del comando CONFIG
Stato
e segnale di uscita
ALM (stato) Stato attuale Stato attuale Stato attuale
CMDRDY (stato) 1 0 1
altro stato Stato attuale non specificato Stato attuale
ALARM (codice) Allarmi attualmente attivi Allarmi attualmente attivi Allarmi attualmente attivi
ALM
(segnale di uscita CN1)
Altri segnali di uscita Stato attuale non specificato Stato attuale
Classificazioni
elaborazioni
Tempo
di elaborazione
i segnali di uscita e così via.
• Può essere utilizzato durante le fasi 2 e 3.
• Il SERVOPACK passa alla modalità Servo OFF se tale comando viene
ricevuto quando il SERVOPACK è Servo ON.
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
-Se si modificano i parametri nel mezzo del funzionamento
con CX-Drive: Avviso comando 1 (A.95A)
Prima di CONFIG Durante CONFIG Dopo CONFIG
Stato attuale Stato attuale Stato attuale
Gruppo
comandi
di controllo
Entro 4 s + α
Classificazioni
sincronizzazioni
∗
Sottocomando Non può essere
Asincrono
utilizzato
64
Page 67

4.2 Comandi principali
4.2.7 Leggi allarme o avviso (ALM_RD: 05H)
Byte ALM_RD Descrizione
Comando Risposta
1 05H 05H
2 − ALARM
3 STATUS • Legge il seguente stato di allarme o di avviso.
4
5 ALM_RD_
MOD
6 − ALM_DATA
7
8
9
10
11
12
13
14
15
16 WDT RWDT
* Lo storico degli allarmi viene salvato nella memoria non volatile e non andrà perso in caso di disattivazione
della corrente.
ALM_RD_
MOD
Classificazioni
elaborazioni
Tempo
di elaborazione
-Stato di allarme/avviso corrente
-Storico degli allarmi* (lo storico degli avvisi non viene conservato).
• Nella tabella seguente sono riportate le caratteristiche di ALM_RD_MOD.
• I codici di allarme e di avviso sono impostati in ALM_DATA dal byte
n. 6 in ordine di rilevamento e 0 è impostato nei byte che appaiono vuoti
nella tabella. Di conseguenza, i dati nel byte 6 si riferiscono ai codici
di allarme e di avviso più recenti.
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
-Se ALM_RD_MOD non rientra nell'intervallo: Avviso impostazione
dati 2 (A.94B)
Informazioni dettagliate su ALM_RD_MOD
ALM_RD_MOD Descrizione Tempo di
0 Lettura di massimo 10 voci dello stato di allarme/avviso corrente
1 Lettura di massimo 10 voci dello storico degli allarmi
2 Riceve informazioni dettagliate sull'allarme o avviso corrente uno
3 Riceve informazioni dettagliate sullo storico degli allarmi uno per uno.
(dal sesto al quindicesimo byte).
(lo storico degli avvisi non viene conservato).
per uno. Impostare l'ordine da 0 (il più recente) a 9 per l'indice degli
allarmi.
Byte
6
7-8
Impostare l'ordine da 0 (il più recente) a 9 per l'indice degli allarmi.
Byte
6
7-8
Comando
Indice degli allarmi
0
Comando
Indice degli allarmi
0
Gruppo comandi
di comunicazione dei dati
Fare riferimento al
Informazioni
dettagliate su
ALM_RD_MOD.
Risposta
Indice degli allarmi
Codice di allarme
Risposta
Indice degli allarmi
Codice di allarme
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
elaborazione
All'interno del ciclo
di comunicazione
Entro 60 ms
Entro 12 ms
65
Page 68

4.2 Comandi principali
Ciascun codice di allarme del SERVOPACK serie JUNMA è lungo 2 byte. Il formato dati del codice
di allarme è il seguente.
D15-D12 D11-D4 D3-D0
Riservato (0) Codice di allarme Informazioni dettagliate
Nota: 1. Quando ALM_RD_MOD = 0 o 1, viene restituito il codice di allarme (lungo 1 byte).
2. Quando ALM_RD_MOD = 2 o 3, viene restituito il codice di allarme (lungo 2 byte).
4.2.8 Cancella allarme o avviso (ALM_CLR: 06H)
Byte ALM_CLR Descrizione
Comando Risposta
1 06H 06H
2 − ALARM
3 STATUS • Cancella il seguente stato di allarme o di avviso.
4
5 ALM_CLR_
MOD
6 −−
7
8
9
10
11
12
13
14
15
16 WDT RWDT
* Lo storico degli allarmi viene salvato nella memoria non volatile e non andrà perso in caso di disattivazione
dell’alimentazione.
ALM_CLR_
MOD
Informazioni dettagliate su ALM_CLR_MOD
ALM_CLR_MOD Descrizione Tempo di elaborazione
0 Cancella lo stato di allarme/avviso
1 Cancella lo storico degli allarmi Entro 2 s
corrente
Classificazioni
elaborazioni
Tempo
di elaborazione
-Stato di allarme/avviso corrente
-Storico degli allarmi* (lo storico degli avvisi non viene conservato).
• Nella tabella seguente sono riportate le caratteristiche
di ALM_CLR_MOD.
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
-Se si modificano i parametri nel mezzo del funzionamento
con CX-Drive: Avviso comando 1 (A.95A)
-Se ALM_CLR_MOD non rientra nell'intervallo: Avviso impostazione
dati 2 (A.94B)
Gruppo
comandi
di controllo
Fare riferimento al
Informazioni
dettagliate su
ALM_CLR_MOD
Entro 200 ms
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
66
Page 69

4.2 Comandi principali
4.2.9 Avvia comunicazione sincrona (SYNC_SET: 0DH)
Byte SYNC_SET Descrizione
Comando Risposta
10DH 0DH
2 − ALARM
3 STATUS • Avvia la comunicazione sincrona. Passaggio dalla fase 2 alla fase 3.
4
5 −
6
7
8
9
10
11
12
13
14
15
16 WDT RWDT
Classificazioni
elaborazioni
Te mp o
di elaborazione
• La sincronizzazione viene stabilita man mano che nel comando
e nella risposta vengono rilevati i valori di ciascun WDT.
• Durante la fase 3, il comando verrà ignorato (senza avviso).
• Durante la funzione Servo ON nella fase 2, il SERVOPACK passa
alla modalità Servo OFF se si riceve tale comando.
• Quando si verificano i seguenti allarmi, è necessario trasmettere
tale comando per riavviare le comunicazioni sincrone.
-Errore di sincronizzazione MECHATROLINK-II (A.E50)
-Errore di sincronizzazione MECHATROLINK-II (A.E51)
-Errore di comunicazione MECHATROLINK-II (A.E60)
-Errore ciclo di trasmissione MECHATROLINK-II (A.E61)
• Nel seguente caso, viene emesso un avviso e il comando viene ignorato.
-Durante il funzionamento con CX-Drive: Avviso comando 1 (A.95A)
Gruppo
comandi di rete
Ciclo
di trasmissione
o superiore
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
67
Page 70

4.2 Comandi principali
4.2.10 Stabilisci collegamento (CONNECT: 0EH)
Byte CONNECT Descrizione
Comando Risposta
10EH 0EH
2 − ALARM
3 STATUS • Stabilisce un collegamento MECHATROLINK-II. Imposta la modalità
4
5 VER VER
6 COM_MOD COM_MOD
7COM_TIMCOM_TIM
8 −−
9
10
11
12
13
14
15
16 WDT RWDT
Classificazioni
elaborazioni
Te m po
di elaborazione
di comunicazione in base a COM_MOD.
• VER: Versione
• Impostare VER su 21H (ver. 2.1).
• COM_MOD: Modalità di comunicazione. Fare riferimento alla seguente
tabella.
• COM_TIM: Ciclo di comunicazione
Impostare il numero multiplo di ciclo di trasmissione compreso
nell'intervallo tra 1 e 32.
1 [ms] ≤ ciclo di trasmissione [ms] × COM_TIM ≤ 32 [ms]
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
-Se COM_MOD non rientra nell'intervallo: Avviso impostazione
dati 2 (A.94B)
-Se COM_TIM non rientra nell'intervallo: Avviso impostazione
dati 2 (A.94B)
-Se i byte di trasmissione corrispondono a 17 e SUBCMD è 1:
Avviso impostazione dati 2 (A.94B)
-Se VER non è uguale a 21H nella modalità di comunicazione
MECHATROLINK: Avviso impostazione dati 2 (A.94B)
-Durante il funzionamento con CX-Drive: Avviso comando 1 (A.95A)
• I soli comandi che verranno accettati sono CONNECT, DISCONNECT
e NOP. Se viene digitato qualsiasi altro comando, viene inviato NOP
come risposta.
Gruppo comandi
di rete
Ciclo
di comunicazione
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
Informazioni dettagliate su COM_MOD
D7 D6 D5 D4 D3 D2 D1 D0
SUBCMD −−− DTMOD SYNCMOD −
• SYNCMOD:
0: comunicazione asincrona (transizione alla fase 2)
1: comunicazione sincrona (transizione alla fase 3)
• DTMOD: metodi di trasferimento dati
00, 11: trasferimento singolo
01: trasferimento consecutivo
• SUBCMD:
0: sottocomando non utilizzato
1: sottocomando utilizzato
• Impostare 0 negli altri bit.
68
Avviso/allarme
Fase 1
Fase 2
SYNC_SET
Fase 3
SYNCMOD=0
SYNCMOD=1
Page 71

4.2 Comandi principali
4.2.11 Rilascia collegamento (DISCONNECT: 0FH)
Byte DISCONNECT Descrizione
Comando Risposta
10FH 0FH
2 − ALARM Te m po
3 STATUS • Rilascia il collegamento MECHATROLINK-II. SERVOPACK passa alla
4
5 −
6
7
8
9
10
11
12
13
14
15
16 WDT RWDT
Classificazioni
elaborazioni
di elaborazione
fase 1 della comunicazione.
• Può essere utilizzato durante qualsiasi fase.
• Quando si riceve questo comando, verranno eseguite le seguenti
operazioni.
-SERVOPACK passa alla fase 1 della comunicazione.
-SERVOPACK passa a Servo OFF.
-L'impostazione del punto di riferimento non è più valida.
-Verranno inizializzati i dati sulla posizione.
Gruppo
comandi di rete
Ciclo
di comunicazione o superiore
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
4.2.12 Scrivi parametro memorizzato (PPRM_WR: 1CH)
Byte PPRM_WR Descrizione
Comando Risposta
11CH 1CH
2 − ALARM
3 STATUS • Salva un parametro nella memoria non volatile. Se si tratta di parametri
4
5NO NO
6
7 SIZE SIZE
8 PARAME-
TER
9
10
11
12
13
14
15
16 WDT RWDT
PA RA M E -
TER
Classificazioni
elaborazioni
Te mp o
di elaborazione
modificabili online, tali parametri diverranno immediatamente effettivi.
I parametri non modificabile online vengono abilitati tramite il comando
“SETUP DEVICE COMMAND” (Config).
• Può essere utilizzato durante le fasi 2 e 3.
• Viene generato un avviso e il comando viene ignorato nei
seguenti casi.
-Se si modificano i parametri nel mezzo del funzionamento
con CX-Drive: Avviso comando 1 (A.95A)
-Se NO non rientra nell'intervallo: Avviso impostazione dati 1 (A.94A)
-Se SIZE non corrisponde: Avviso impostazione dati 4 (A.94D)
-Se PARAMETER non rientra nell'intervallo: Avviso impostazione
dati 2 (A.94B)
• Per informazioni dettagliate su NO, SIZE e PARAMETER, fare
riferimento a 7.2 Elenco dei parametri.
Gruppo
comandi di
comunicazione
dei dati
Entro 200 ms Sottocomando Non può essere
Classificazioni
sincronizzazioni
Asincrono
utilizzato
69
Page 72

4.2 Comandi principali
4.2.13 Imposta coordinate (POS_SET: 20H)
Byte POS_SET Descrizione
Comando Risposta
1 20H 20H
2 − ALARM Tempo
3 STATUS • Imposta le coordinate. REFE può essere utilizzato anche per attivare
4
5 PS_SUBCMDPS_SUBC
MD
6 POS_DATA POS_DATA
7
8
9
10 − –
11
12
13
14
15
16 WDT RWDT
Classificazioni
elaborazioni
di elaborazione
l’origine (ZPOINT) e gli extracorsa del software.
• Può essere utilizzato durante le fasi 2 e 3.
• PS_SUBCMD: Per informazioni sulle modalità di impostazione delle
coordinate, fare riferimento alla seguente tabella.
• Impostare la posizione in POS_DATA.
• Viene generato un avviso e il comando viene ignorato nei seguenti casi.
-Se viene impostato un numero al di fuori dell''intervallo per
PS_SUBCMD: Avviso impostazione dati 2 (A.94B)
Gruppo
comandi
di comunicazione dei dati
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
Dettagli di PS_SUBCMD
D7 D6 D5 D4 D3 D2 D1 D0
REFE −−− POS_SEL
• REFE: Imposta il punto di riferimento.
0: Non imposta il punto di riferimento.
1: Imposta il punto di riferimento.
Decide le coordinate e vengono attivati la funzione ZPOINT (origine) e gli extracorsa del software.
• POS_SEL: Seleziona le coordinate.
3: Imposta POS_DATA sul punto di riferimento e il sistema di coordinate (POS, MPOS, APOS,
IPOS e TPOS) se viene selezionato APOS (retroazione coordinate macchina) (“3 APOS” può
essere selezionato solo per POS_SEL).
• Impostare tutti gli altri bit su 0.
4.2.14 Applica freno (BRK_ON: 21H)
Byte BRK_ON Descrizione
Comando Risposta
1 21H 21H
Classificazioni
elaborazioni
Gruppo
comandi
di controllo
70
Classificazioni
sincronizzazioni
Asincrono
Page 73

4.2 Comandi principali
Byte BRK_ON Descrizione
Comando Risposta
2 − ALARM Te m po
3 STATUS • Disattiva il segnale del freno e blocca il freno. Tale comando viene
4
5 MONITOR
6
7
8
9 MONITOR
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
1/2
SEL_MON
1/2
di elaborazione
abilitato solo mentre il servoazionamento è disattivato.
• Può essere utilizzato durante le fasi 2 e 3.
• Temporizzazione uscita del segnale del freno
1
2
BK
All'interno
del ciclo di
comunicazione
BRK_ON ricevuto
Entro 3 ms
Sottocomando Non può essere
utilizzato
71
Page 74

4.2 Comandi principali
4.2.15 Rilascia freno (BRK_OFF: 22H)
Byte BRK_OFF Descrizione
Comando Risposta
1 22H 22H
2 − ALARM
3 STATUS • Attiva il segnale del freno e rilascia il freno.
4
5 MONITOR
6
7
8
9 MONITOR
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
1/2
SEL_MON
1/2
Classificazioni
elaborazioni
Tempo
di elaborazione
• Può essere utilizzato durante le fasi 2 e 3.
• Temporizzazione uscita del segnale del freno
1
2
BK
Gruppo
comandi
di controllo
All'interno
del ciclo di
comunicazione
BRK_OFF ricevuto
Entro 3 ms
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
IMPORTANTE
BRK_ON e BRK_OFF sono comandi sempre validi a meno che non si verifichi un allarme.
Se viene inviato un comando BRK_OFF mentre è attiva l'alimentazione del servomotore,
quest'ultimo rimane in funzionamento.
Tuttavia, se in un secondo momento viene inviato un comando Servo OFF, il freno rimane
nello stato di rilascio in quanto il comando BRK_OFF è valido e potrebbe causare una
situazione critica.
Quando si utilizza il comando BRK_ON o BRK_OFF, tenere sempre presente lo stato
del comando.
72
Page 75

4.2 Comandi principali
4.2.16 Attiva sensore (SENS_ON: 23H)
Byte SENS_ON Descrizione
Comando Risposta
123H 23H
2 − ALARM
3 STATUS • Ottiene i dati sulla posizione iniziale e crea la posizione attuale.
4
5 MONITOR
6
7
8
9 MONITOR
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
1/2
SEL_MON
1/2
Classificazioni
elaborazioni
Te mp o
di elaborazione
• Può essere utilizzato durante le fasi 2 e 3.
1
2
Gruppo comandi
di controllo
Entro 1 s Sottocomando Non può essere
Classificazioni
sincronizzazioni
Asincrono
utilizzato
4.2.17 Disattiva sensore (SENS_OFF: 24H)
Byte SENS_OFF Descrizione
Comando Risposta
124H 24H
2 − ALARM
3 STATUS • Vengono disattivati il punto di riferimento, l’origine (ZPOINT) e gli
4
5 MONITOR
6
7
8
9 MONITOR
10
11
12
13 SEL_MON
1/2
14 − IO_MON
15
16 WDT RWDT
SEL_MON
1/2
Classificazioni
elaborazioni
Te mp o
di elaborazione
extracorsa del software.
• Può essere utilizzato durante le fasi 2 e 3.
• Nel seguente caso, viene emesso un avviso e il comando viene ignorato.
1
2
-Mentre il SERVOPACK è servo ON: Avviso comando 1 (A.95A)
Gruppo comandi
di controllo
Entro 1 s Sottocomando Non può essere
Classificazioni
sincronizzazioni
73
Asincrono
utilizzato
Page 76

4.2 Comandi principali
4.2.18 Arresta movimento (HOLD: 25H)
Byte HOLD Descrizione
Comando Risposta
1 25H 25H
2 − ALARM
3 OPTION STATUS • Arresta il servomotore per il posizionamento in base al metodo
4
5HOLD_
MOD
6 −
7
8
9 MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
MONITOR1
SEL_MON
1/2
Per i sottocomandi.
Classificazioni
elaborazioni
Te mp o
di elaborazione
di arresto impostato in HOLD_MOD.
• Dallo stato di movimento, esegue una decelerazione posizionandosi
in base alla velocità di decelerazione impostata nei parametri.
• È possibile selezionare il metodo di arresto utilizzando HOLD_MOD.
0: decelerazione fino all'arresto in base al parametro di decelerazione.
1: arresto immediato (interruzione dell'uscita).
• Può essere utilizzato durante le fasi 2 e 3.
• Il campo OPTION non può essere utilizzato. Impostare tutti i bit su 0.
• Utilizzare DEN (uscita completata) per confermare il completamento
del posizionamento.
• L'elaborazione di LATCH dipendente dalla funzione LATCH,
EX_POSING verrà annullata.
• L'elaborazione del LATCH ZRET e l'allineamento di origine ZRET
verranno annullati.
• Una volta completato il comando, è necessario leggere la posizione di
riferimento (POS) e configurare il sistema di coordinate del controllore.
• La modalità di LATCH modale impostata con il comando LTMOD_ON
rimane effettiva.
Gruppo
comandi
di movimento
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Può essere
Asincrono
utilizzato
Parametri correlati
Nr. parametro Descrizione
Pn80E Parametro di decelerazione lineare
74
Page 77

4.2 Comandi principali
4.2.19 Richiesta modalità di LATCH (LTMOD_ON: 28H)
Byte LT MO D _O N Descrizione
Comando Risposta
128H 28H
2LT_SGN ALARM
3 − STATUS • Imposta la modalità di LATCH modale. Se viene emesso un segnale
4
5 MONITOR1
6
7
8
9 MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sottocomandi.
Classificazioni
elaborazioni
Te mp o
di elaborazione
di LATCH durante la modalità di LATCH modale, viene eseguito
il LATCH della posizione.
• Può essere utilizzato durante le fasi 2 e 3.
• È possibile selezionare un ulteriore segnale di LATCH utilizzando
LT_SGN. Fare riferimento a Specifiche campo segnale di LATCH
(LT_SGN).
• Utilizzare CMDRDY = 1 per confermare la ricezione del comando
Request Latch Mode.
• Una volta terminato il LATCH, verificare che L_CMP sia impostato
su1in STATUS.
-Quando la risposta del comando contiene dati di monitoraggio quali
SMON o POSING, la funzione LPOS viene obbligatoriamente ripristinata su MONITOR2.
-Quando la risposta del comando non contiene dati di monitoraggio
quali PRM_RD o ALM_RD, verificare che L_CMP sia impostato su 1
in STATUS, quindi utilizzare un comando contenente dati di monitoraggio, quali SMON, nella risposta e selezionare LPOS per la conferma.
• Una volta eseguita l'operazione di LATCH, questa non verrà eseguita
una seconda volta anche se viene emesso un segnale di LATCH.
Inviare un comando LTMOD_OFF e, quindi, un nuovo comando
LT MO D _O N .
• Interferenza con un altro comando in modalità di LATCH
-Durante l'esecuzione di un comando quale LATCH, ZRET
o EX_POSING, non è possibile utilizzare il comando LTMOD_ON.
Se si utilizza tale comando durante l'esecuzione di tali comandi,
viene emesso l'avviso di comando 4 (A.95D).
Gruppo comandi
di controllo
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
Parametri correlati
Nr. parametro Descrizione
Pn820 Limite superiore area di LATCH
Pn822 Limite inferiore area di LATCH
75
Page 78

4.2 Comandi principali
4.2.20 Rilascia modalità di LATCH (LTMOD_OFF: 29H)
Byte LT M OD _O F F Descrizione
Comando Risposta
1 29H 29H
2 − ALARM
3 − STATUS • Rilascia la modalità di LATCH modale.
4
5 MONITOR1
6
7
8
9 MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sottocomandi.
Classificazioni
elaborazioni
Tempo
di elaborazione
• Può essere utilizzato durante le fasi 2 e 3.
• Verificare che CMDRDY sia impostato su 1 per confermare la ricezione
del comando Release Latch Mode.
• Interferenza con un altro comando in modalità di LATCH
-Durante l'esecuzione di un comando quale LATCH, ZRET
o EX_POSING, non è possibile utilizzare il comando LTMOD_OFF.
Se si utilizza tale comando durante l'esecuzione di tali comandi,
viene emesso l'avviso di comando 4 (A.95D).
Gruppo comandi
di controllo
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
76
Page 79

4.2.21 Monitoraggio stato (SMON: 30H)
Byte SMON Descrizione
Comando Risposta
130H 30H
2 − ALARM
3 STATUS • Legge lo stato corrente del SERVOPACK.
4
5 MONITOR1
6
7
8
9 MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sottocomandi.
Classificazioni
elaborazioni
Te mp o
di elaborazione
• Può essere utilizzato durante le fasi 2 e 3.
Gruppo comandi
di comunicazione dei dati
All'interno
del ciclo di
comunicazione
4.2 Comandi principali
Classificazioni
sincronizzazioni
Sottocomando Può essere
Asincrono
utilizzato
77
Page 80

4.2 Comandi principali
4.2.22 Servo ON (SV_ON: 31H)
Byte SV_ON Descrizione
Comando Risposta
1 31H 31H
2 − ALARM
3 OPTION STATUS • Attiva il motore.
4
5 − MONITOR1
6
7
8
9 MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sotto-
comandi.
Classificazioni
elaborazioni
Tempo
di elaborazione
• Può essere utilizzato durante le fasi 2 e 3.
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
-Durante un allarme (quando ALM di STATUS è 1): avviso comando
1(A.95A)
-Se viene disattivata l'alimentazione principale
(quando PON di STATUS è 0): avviso comando 1 (A.95A)
-Se l'ingresso dell'interruttore per l'arresto di emergenza viene attivato
(quando E-STP di IO_MON è 1): avviso comando 1 (A.95A)
• Il campo OPTION non può essere utilizzato. Impostare tutti i bit su 0.
• Una volta completato il comando, è necessario leggere la posizione di
riferimento (POS) e configurare il sistema di coordinate del controllore.
• Se viene inviato un comando SV_ON dopo l'attivazione del servo
tramite CX-Drive, viene emesso l'allarme Allarme riferimento servo
ON non valido (A.0b0).
Gruppo
comandi
di controllo
Entro 50 ms Sottocomando Può essere
Classificazioni
sincronizzazioni
Asincrono
utilizzato
78
Page 81

4.2.23 Servo OFF (SV_OFF: 32H)
Byte SV_OFF Descrizione
Comando Risposta
132H 32H
2 − ALARM
3 STATUS • Spenge il motore.
4
5 MONITOR1
6
7
8
9 MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sottocomandi.
Classificazioni
elaborazioni
Te mp o
di elaborazione
• Può essere utilizzato durante le fasi 2 e 3.
Gruppo
comandi
di controllo
Entro 50 ms Sottocomando Può essere
4.2 Comandi principali
Classificazioni
sincronizzazioni
Asincrono
utilizzato
79
Page 82

4.2 Comandi principali
4.2.24 Avanzamento interpolazione (INTERPOLATE: 34H)
Byte INTERPOLATE Descrizione
Comando Risposta
1 34H 34H
2 − ALARM
3 OPTION STATUS • Avvia l'avanzamento dell'interpolazione ogni ciclo di comunicazione.
4
5 TPOS MONITOR1
6
7
8
9 VFF MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sotto-
comandi.
Classificazioni
elaborazioni
Tempo
di elaborazione
• Può essere utilizzato durante la fase 3.
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
-Durante la fase 2: avviso comando 1 (A.95A)
-Se il SERVOPACK è Servo OFF: avviso comando 1 (A.95A)
-Se la velocità di uscita [Posizione di riferimento (TPOS) –
Posizione corrente (IPOS)] supera la velocità massima:
Avviso impostazione dati 2 (A.94B)
• Il campo OPTION non può essere utilizzato. Impostare tutti i bit su 0.
• La posizione di riferimento (TPOS) viene indicata tramite 4 byte più
il segno.
• Utilizzare DEN (uscita completata) per confermare il completamento
dell'invio della posizione di riferimento.
• Per informazioni dettagliate sull'interpolazione, fare riferimento a 6.5.1
Comandi correlati a INTERPOLATE.
• Non è possibile utilizzare il comando di feed-forward della velocità (VFF).
Se viene emesso un comando VFF, non viene applicata alcuna
compensazione per il feed-forward della velocità.
Gruppo
comandi
di movimento
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Può essere
Sincrono
utilizzato
80
Page 83

4.2 Comandi principali
4.2.25 Posizionamento (POSING: 35H)
Byte POSING Descrizione
Comando Risposta
135H 35H
2 − ALARM
3 OPTION STATUS • Esegue il posizionamento della posizione di riferimento (TPOS) utiliz4
5 TPOS MONITOR1
6
7
8
9 TSPD MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sottocomandi.
Classificazioni
elaborazioni
Te mp o
di elaborazione
zando la velocità di riferimento (TSPD).
• Può essere utilizzato durante le fasi 2 e 3.
• Viene emesso un avviso e il comando viene ignorato nei seguenti casi.
-Se il SERVOPACK è Servo OFF: avviso comando 1 (A.95A)
-Se la velocità di riferimento (TSPD) supera la velocità massima:
Avviso impostazione dati 2 (A.94B)
• Il campo OPTION non può essere utilizzato. Impostare tutti i bit su 0.
• La posizione di riferimento (TPOS) sono 4 byte con segna. Viene inviata
utilizzando una posizione assoluta nel sistema di coordinate di riferimento.
• La velocità di riferimento (TSPD) sono 4 byte senza segno. Viene inviata
nell'intervallo compreso tra 0 e la velocità massima [unità di riferimento].
• È possibile apportare modifiche alla posizione di riferimento e alla
velocità di riferimento durante il movimento.
• Utilizzare DEN (uscita completata) per confermare il completamento
dell'invio della posizione di riferimento.
• Per informazioni dettagliate sui comandi di posizionamento,
fare riferimento a 6.5.2 Comandi correlati a POSING.
Gruppo
comandi
di movimento
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Può essere
Asincrono
utilizzato
Parametri correlati
Nr. parametro Descrizione
Pn80B Parametro di accelerazione lineare
Pn80E Parametro di decelerazione lineare
81
Page 84

4.2 Comandi principali
4.2.26 Avanzamento velocità costante (FEED: 36H)
Byte FEED Descrizione
Comando Risposta
1 36H 36H
2 − ALARM
3 OPTION STATUS • Esegue l'avanzamento a velocità costante utilizzando la velocità
4
5 − MONITOR1
6
7
8
9 TSPD MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sotto-
comandi.
Classificazioni
elaborazioni
Tempo
di elaborazione
di riferimento (TSPD). Il servo esegue l'avanzamento a velocità costante
mediante il controllo della posizione. Utilizzare il comando Stop Motion
(HOLD: 25H) per arrestare l'avanzamento a velocità costante.
• Può essere utilizzato durante le fasi 2 e 3.
• Viene emesso un avviso di comando e il comando viene ignorato
nei seguenti casi.
-Se il SERVOPACK è Servo OFF: avviso comando 1 (A.95A)
-Se la velocità di riferimento (TSPD) supera la velocità massima:
Avviso impostazione dati 2 (A.94B)
• Il campo OPTION non può essere utilizzato. Impostare tutti i bit su 0.
• La velocità di riferimento (TSPD) sono 4 byte con segno. La direzione
viene determinata dal segno. La velocità di riferimento viene inviata
nell'intervallo compreso tra una velocità massima negativa e una
positiva [unità di riferimento].
• È possibile apportare modifiche alla velocità di riferimento durante
il movimento.
• Utilizzare DEN (uscita completata) per confermare il completamento
dell'invio della posizione di riferimento.
• Per informazioni dettagliate sui comandi di posizionamento, fare
riferimento a 6.5.2 Comandi correlati a POSING per i dettagli sul
funzionamento.
Gruppo
comandi
di movimento
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Può essere
Asincrono
utilizzato
Parametri correlati
Nr. parametro Descrizione
Pn80B Parametro di accelerazione lineare
82
Page 85

4.2 Comandi principali
4.2.27
Avanzamento interpolazione con rilevamento posizione (LATCH: 38H)
Byte LATCH Descrizione
Comando Risposta
138H 38H
2LT_SGN ALARM
3 OPTION STATUS • Esegue l'avanzamento dell'interpolazione e blocca la posizione
4
5 TPOS MONITOR1
6
7
8
9 VFF MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sotto-
comandi.
Classificazioni
elaborazioni
Te mp o
di elaborazione
utilizzando il segnale di LATCH specificato in LT-SGN.
• Se viene emesso il segnale di LATCH, la posizione al momento della
ricezione viene registrata come posizione di LATCH di retroazione
(LPOS) del sistema di coordinate della macchina e la funzione LPOS
verrà obbligatoriamente indicata come MONITOR2 per un ciclo
di comunicazione.
• Può essere utilizzato durante la fase 3.
• Viene emesso un avviso di comando e il comando viene ignorato
nei seguenti casi.
-Durante la fase 2: avviso comando 1 (A.95A)
-Se il SERVOPACK è Servo OFF: avviso comando 1 (A.95A)
-Se la velocità di uscita [la posizione di riferimento (TPOS) –
la posizione corrente (IPOS)] supera la velocità massima:
Avviso impostazione dati 2 (A.94B)
• È possibile utilizzare LT_SGN. Fare riferimento a 4.5.1 Specifiche
campo segnale di LATCH: LT_SGN (LT_SGN).
• Il campo OPTION non può essere utilizzato. Impostare tutti i bit su 0.
• Non è possibile utilizzare il comando di feed-forward della velocità
(VFF).
Se viene emesso un comando VFF, non viene applicata alcuna
compensazione per il feed-forward della velocità.
• Utilizzare DEN (uscita completata) per confermare il completamento
del movimento.
• Per informazioni dettagliate sull'interpolazione, fare riferimento
a 6.5.1 Comandi correlati a INTERPOLATE.
Gruppo
comandi
di movimento
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Può essere
Parametri correlati
Nr. parametro Descrizione
Pn820 Limite superiore area di LATCH
Pn822 Limite inferiore area di LATCH
83
Sincrono
utilizzato
Page 86

4.2 Comandi principali
4.2.28 Posizionamento ingresso esterno (EX_POSING: 39H)
Byte EX_POSING Descrizione
Comando Risposta
1 39H 39H
2LT_SGN ALARM
3 OPTION STATUS • Passa dalla posizione di riferimento (TPOS) alla velocità di riferimento
4
5 TPOS MONITOR1
6
7
8
9 TSPD MONITOR2
10
11
12
13 SEL_MON
14 − I/O_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sottocomandi.
Classificazioni
elaborazioni
Tempo
di elaborazione
(TSPD). Quando un segnale di LATCH viene attivato durante il posizionamento viene eseguito in base alla distanza di spostamento finale
per la posizione specificata nel parametro posizione ingresso segnale
di LATCH. Quando non viene emesso alcun segnale di LATCH, il posizionamento viene eseguito in base alla posizione di riferimento (TPOS).
• Può essere utilizzato durante le fasi 2 e 3.
• Viene emesso un avviso di comando e il comando viene ignorato
nei seguenti casi.
-Se il SERVOPACK è Servo OFF: avviso comando 1 (A.95A)
-Se la velocità di riferimento (TSPD) supera la velocità massima:
Avviso impostazione dati 2 (A.94B)
• Il campo OPTION non può essere utilizzato. Impostare tutti i bit su 0.
• La posizione di riferimento (TPOS) sono 4 byte con segno
[unità di riferimento]. Viene inviata utilizzando una posizione
assoluta nel sistema di coordinate di riferimento.
• La velocità di riferimento (TSPD) sono 4 byte senza segno.
Viene inviata nell'intervallo compreso tra 0 e la velocità massima
[unità di riferimento].
• Una volta inserito il LATCH, tutte le modifiche apportate alla posizione
di riferimento durante il movimento verranno ignorate.
• Utilizzare DEN (uscita completata) per confermare il completamento
dell'invio della posizione di riferimento.
• Per informazioni dettagliate sui comandi di posizionamento,
fare riferimento a 6.5.2 Comandi correlati a POSING.
Gruppo
comandi
di movimento
All'interno
del ciclo di
comunicazione
Classificazioni
sincronizzazioni
Sottocomando Può essere
Asincrono
utilizzato
84
Page 87

Parametri correlati
Nr. parametro Descrizione
Pn80B Parametro di accelerazione lineare
Pn80E Parametro di decelerazione lineare
Pn814 Distanza di spostamento finale per posizionamento
Pn820 Limite superiore area di LATCH
Pn822 Limite inferiore area di LATCH
esterno
Funzionamento
Se viene emesso un segnale di LATCH,
il posizionamento viene eseguito per la posizione
calcolata con la seguente equazione: Posizione rilevata
all'ingresso segnale di LATCH (LPOS) + distanza
di spostamento finale per posizionamento esterno
specificato in Pn814.
Quando non viene emesso un segnale di LATCH,
il posizionamento viene eseguito in base alla posizione
di riferimento (TPOS).
Segnale
di LATCH
4.2 Comandi principali
4.2.29 Ricerca di origine (ZRET: 3AH)
Byte ZRET Descrizione
Comando Risposta
13AH 3AH
2LT_SGN ALARM
Classificazioni
elaborazioni
Te mp o
di elaborazione
Gruppo
comandi
di movimento
All'interno
del ciclo di
comunicazione
85
Classificazioni
sincronizzazioni
Sottocomando Può essere
Asincrono
utilizzato
Page 88

4.2 Comandi principali
Byte ZRET Descrizione
Comando Risposta
3 OPTION STATUS • Eseguire una ricerca di origine utilizzando la seguente sequenza.
4
5 − MONITOR1
6
7
8
9 TSPD MONITOR2
10
11
12
13 SEL_MON
14 − IO_MON
15
16 WDT RWDT
17 Per i sotto18
19
20
21
22
23
24
25
26
27
28
29
1/2
comandi.
SEL_MON
1/2
Per i sottocomandi.
1. Accelera alla velocità di riferimento (TSPD) nella direzione
specificata nel parametro (Pn816) e continua a spostarsi alla velocità
di riferimento.
2. Decelera alla velocità di ricerca di origine 1 (Pn817) a DEC = 1.
3. La funzione di LATCH viene avviata a DEC = 0.
4. Quando viene emesso un segnale di LATCH, il posizionamento
viene eseguito per definire la posizione di riferimento alla velocità
di ricerca di origine 2 (Pn818). La posizione di riferimento viene
calcolata aggiungendo la distanza di spostamento finale di approccio
(Pn819). Una volta completato il posizionamento, il sistema di
coordinate viene impostato in modo che la posizione raggiunta
sia pari a 0.
• Può essere utilizzato durante le fasi 2 e 3.
• Viene emesso un avviso di comando e il comando viene ignorato
nei seguenti casi.
-Se il SERVOPACK è Servo OFF: avviso comando 1 (A.95A)
-Se la velocità di riferimento (TSPD) supera la velocità massima:
Avviso impostazione dati 2 (A.94B)
• Il campo OPTION non può essere utilizzato. Impostare tutti i bit su 0.
• La velocità di riferimento (TSPD) sono 4 byte senza segno.
Viene inviata nell'intervallo compreso tra 0 e la velocità massima
[unità di riferimento].
• Prima che venga emesso il segnale DEC, è possibile modificare
la velocità di riferimento durante il movimento.
• Utilizzare DEN (uscita completata) e ZPOINT (posizione principale)
per confermare il completamento dell'invio della posizione di riferimento.
86
Page 89

Parametri correlati
Nr. parametro Descrizione
Pn80B Parametro di accelerazione lineare
Pn80E Parametro di decelerazione lineare
Pn816 Direzione di ricerca di origine
Pn817 Velocità ricerca di origine 1
Pn818 Velocità ricerca di origine 2
Pn819 Distanza di spostamento finale per la ricerca di origine
Pn820 Limite superiore area di LATCH
Pn822 Limite inferiore area di LATCH
Funzionamento
4.2 Comandi principali
Velocità di riferimento
Velocità ricerca di origine 1 (Pn817)
Velocità ricerca di origine 2 (Pn818)
DEC
Segnale di LATCH
4.2.30 Regolazione (ADJ: 3EH)
Byte ADJ Descrizione
Comando Risposta
13EH 3EH
2 SUBCODE ALARM
Classificazioni
elaborazioni
Te mp o
di elaborazione
Gruppo
comandi
di comunicazione dei dati
Dipendente
dall'elaborazione
Distanza di spostamento
finale per la ricerca
di origine (Pn819)
Classificazioni
sincronizzazioni
Sottocomando Non può essere
Asincrono
utilizzato
87
Page 90

4.2 Comandi principali
Byte ADJ Descrizione
Comando Risposta
3 − STATUS • Tale comando è per la manutenzione. È possibile eseguire
4
5CCMD CANS
6
7CAD-
DRESS
8
9 CSIZE CSIZE/
10
11 CDATA CDATA
12
13
14
15
16 WDT RWDT
CAD-
DRESS
ERRCODE
l'inizializzazione dei parametri.
• Utilizzare come SUBCODE = 01H.
• Fare riferimento alla pagina successiva, per le modalità di impostazione
di tale comando.
• Viene emesso un avviso di comando e il comando viene ignorato
nei seguenti casi.
-Se si modificano i parametri durante il funzionamento con CX-Drive:
Avviso comando 1 (A.95A)
-Se CADDRESS non rientra nell'intervallo: avviso impostazione
parametro (A.94A)
-Se CSIZE non corrisponde: avviso impostazione parametro (A.94D)
-Se CCMD o CDATA non rientra nell'intervallo: avviso impostazione
parametro (A.94B)
88
Page 91

4.2 Comandi principali
Impostazione della modalità di inizializzazione dei parametri tramite
i comandi ADJ
Utilizzare la seguente procedura per selezionare una modalità di funzionamento.
1. Impostare la modalità “Inizializzazione parametri”.
Impostare i campi dei comandi sulle seguenti impostazioni.
SUBCODE = 01H (fisso)
CCMD = 0004H (impostazione dati: fissa)
CADDRESS = 2000H (indirizzo modalità di funzionamento = 2000H: fissa)
CSIZE = 0002H (dimensioni = 2H: fissa)
CDATA = 1005H (modalità di funzionamento = 1005H: fissa)
Una volta inviati i dati, attendere che CMDRDY di STATUS sia uguale a 1 e verificare
ERRCODE per confermare che non si siano verificati errori.
2. Eseguire l'Inizializzazione dei parametri.
Impostare i campi dei comandi sulle seguenti impostazioni.
SUBCODE = 01H (fisso)
CCMD = 0004H (impostazione dati: fissa)
CADDRESS = 2001H (indirizzo modalità di funzionamento = 2001H: fissa)
CSIZE = 0002H (dimensioni = 2H: fissa)
CDATA = 0001H (esecuzione modalità di funzionamento = 0001H: fissa)
Una volta inviati i dati, attendere che CMDRDY di STATUS sia uguale a 1 e verificare
ERRCODE per confermare che non si siano verificati errori.
3. Impostare “Modalità normale” dopo l'esecuzione.
Impostare i campi dei comandi sulle seguenti impostazioni.
SUBCODE = 01H (fisso)
CCMD = 0004H (impostazione dati: fissa)
CADDRESS = 2000H (indirizzo modalità di funzionamento = 2000H: fissa)
CSIZE = 0002H (dimensioni = 2H: fissa)
CDATA = 0000H (modalità normale: fissa)
Quando CMDRDY di STATUS cambia in 1, l'esecuzione è stata completata.
89
Page 92

4.3 Sottocomandi
4.3 Sottocomandi
In questa sezione vengono descritti i sottocomandi MECHATROLINK-II applicabili con il SERVOPACK
SJDE-ANA-OY.
È possibile utilizzare i sottocomandi MECHATROLINK-II specificandoli con il comando CONNECT
all'avvio della rete MECHATROLINK-II.
Utilizzano dal diciassettesimo al ventinovesimo byte del comando e dei dati di risposta.
4.3.1 Nessun funzionamento (NOP: 00H)
Byte NOP Descrizione
Comando Risposta
17 00H 00H
18 − SUBSTATUS • Nessun comando di funzionamento.
19
20
21
22
23
24
25
26
27
28
29
Classificazioni
elaborazioni
Gruppo
comandi di rete
Tempo
di elaborazione
All'interno
del ciclo di
comunicazione
4.3.2 Leggi parametro (PRM_RD: 01H)
Byte PRM_RD Descrizione
Comando Risposta
17 01H 01H
18 – SUBSTATUS • Legge un parametro.
19 NO NO
20
21 SIZE SIZE
22 – PARAME23
24
25
26
27
28
29
TER
Classificazioni
elaborazioni
Tale comando ha la stessa funzione del comando principale
PRM_RD.
Gruppo
comandi
di comunicazione dei dati
90
Te mp o
di elaborazione
Entro 100 ms
Page 93

4.3.3 Scrivi parametro (PRM_WR: 02H)
Byte PRM_WR Descrizione
Comando Risposta
17 02H 02H
18 − SUBSTATUS • Scrive un parametro.
19 NO NO
20
21 SIZE SIZE
22 PARAME23
24
25
26
27
28
29
TER
PA RA M E -
TER
Classificazioni
elaborazioni
Tale comando ha la stessa funzione del comando principale
PRM_WR.
Gruppo
comandi
di comunicazione dei dati
4.3.4 Leggi allarme o avviso (ALM_RD: 05H)
Byte ALM_RD Descrizione
Comando Risposta
17 05H 05H
18 - SUBSTATUS • Legge l'allarme o l'avviso.
19 ALM_RD_
20 - ALM_DATA
21
22
23
24
25
26
27
28
29
MOD
ALM_RD_
MOD
Classificazioni
elaborazioni
Tale comando ha la stessa funzione del comando principale ALM_RD.
Gruppo
comandi
di comunicazione dei dati
Te mp o
di elaborazione
Te mp o
di elaborazione
4.3 Sottocomandi
Entro 100 ms
6 ms … 2 s
91
Page 94

4.3 Sottocomandi
4.3.5 _PPRM_WriteParameter 1CH)
Byte PPRM_WR Descrizione
Comando Risposta
17 1CH 1CH
18 – SUBSTATUS • Scrive un parametro.
19 NO NO
20
21 SIZE SIZE
22 PARAME23
24
25
26
27
28
29
TER
PA RA M E -
TER
Classificazioni
elaborazioni
Tale comando ha la stessa funzione del comando principale
PPRM_WR.
Gruppo
comandi
di comunicazione dei dati
Tempo
di elaborazione
4.3.6 Richiedi modalità di LATCH (LTMOD_ON: 28H)
Byte LTM O D_ O N Descrizione
Comando Risposta
17 28H 28H
18 LT_SGN SUBSTATUS • Imposta la modalità di LATCH modale.
19 SEL_MON
3/4
20 – MONITOR3
21
22
23
24 MONITOR4
25
26
27
28 – –
29
SEL_MON
3/4
Classificazioni
elaborazioni
Tale comando ha la stessa funzione del comando principale
LT MO D _O N .
Gruppo
comandi
di controllo
Tempo
di elaborazione
Entro 200 ms
All'interno
del ciclo di
comunicazione
92
Page 95

4.3 Sottocomandi
4.3.7 Rilascia modalità di LATCH (LTMOD_OFF: 29H)
Byte LT MO D _O FF Descrizione
Comando Risposta
17 29H 29H
18 – SUBSTATUS • Rilascia la modalità di LATCH modale.
19 SEL_MON
20 – MONITOR3
21
22
23
24 MONITOR4
25
26
27
28 – –
29
3/4
SEL_MON
3/4
Classificazioni
elaborazioni
Tale comando ha la stessa funzione del comando principale
LT MO D _O FF.
Gruppo
comandi
di controllo
Te mp o
di elaborazione
All'interno
del ciclo di
comunicazione
4.3.8 Monitoraggio stato (SMON: 30H)
Byte SMON Descrizione
Comando Risposta
17 30H 30H
18 – SUBSTATUS • Legge le informazioni sul monitoraggio specificate in SEL_MON3/4.
19 SEL_MON
20 – MONITOR3
21
22
23
24 MONITOR4
25
26
27
28 – –
29
3/4
SEL_MON
3/4
Classificazioni
elaborazioni
Tale comando ha la stessa funzione del comando principale SMON.
Gruppo
comandi
di comunicazione dei dati
Te mp o
di elaborazione
All'interno
del ciclo di
comunicazione
93
Page 96

4.4 Combinazione di comandi e sottocomandi MECHATROLINK-II.
4.4 Combinazione di comandi e sottocomandi
MECHATROLINK-II.
È possibile utilizzare i sottocomandi MECHATROLINK-II combinandoli come elencato di seguito.
Codice
00 NOP
01 PRM_RD
02 PRM_WR
03 ID_RD
04 CONFIG
05 ALM_RD
06 ALM_CLR
0D SYNC_SET
0E CONNECT
0F DISCONNECT
1C PPRM_WR
20 POS_SET
21 BRK_ON
22 BRK_OFF
23 SENS_ON
24 SENS_OFF
25 HOLD
28 LTMOD_ON
29 LTMOD_OFF
30 SMON
31 SV_ON
32 SV_OFF
34 INTERPO-
35 POSING
36 FEED
38 LATCH
39 EX_POSING
3A ZRET
3E ADJ
Nota: 9: Può essere combinato.
Comando
principale
LATE
×: Non può essere combinato.
NOP PRM
99 9 99999
9
9
99 9 99999
9
9
9
9
9
9
9
9
9
9
9
99 9 99999
9
9
99 9 99999
99 9 99999
99 9 99999
99 9 99999
99 9 99999
99 9 99999
99999
99999
99999
9
Sottocomando
_RD
PRM
_WR
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
× × × × × × 9
ALM
_RD
PPRM
_WR
LT MO D
LT MO D
_ON
_OFF
× × 9
× × 9
× × 9
SMON
IMPORTANTE
Se si riceve un comando con un sottocomando che non può essere combinato, si attiva
il segnale di avviso A.95d o A.95E (vedere 8.3.2 Visualizzazione degli avvisi e soluzione dei
problemi per informazioni dettagliate) e il comando viene ignorato.
Il servo non viene disattivato e il servomotore non viene arrestato se si riceve un comando
con un sottocomando che non può essere combinato durante il funzionamento.
94
Page 97

4.5 Campo dati di comando
4.5 Campo dati di comando
Tale sezione descrive i dati di comando nei comandi principali e nei sottocomandi.
4.5.1 Specifiche campo segnale di LATCH: LT_SGN
Le specifiche del campo del segnale di LATCH (LT_SGN) possono essere definite utilizzando
i seguenti comandi: LATCH, EX_POSING, ZRET, LTMOD_ON
Il campo del segnale di LATCH viene utilizzato per selezionare i segnali di LATCH per i dati di
posizione, con il secondo byte dei comandi principali precedenti o l'area riservata al diciottesimo
byte dei sottocomandi.
Per informazioni dettagliate sull'assegnazione dei bit, fare riferimento alla tabella seguente.
Campo segnale di LATCH
D7 D6 D5 D4 D3 D2 D1 D0
−−−−−− LT _ SG N
Selezione segnale di LATCH
D1 D0 Segnale di LATCH
0 0 Fase Z
01 /EXT1
1 0 Riservati
1 1 Riservati
INFORMAZIONI
Impostare 0 per i bit non utilizzati.
4.5.2 Specifiche campo opzioni: OPTION
Il campo opzioni non può essere utilizzato. Impostare 0 per tutti i bit.
Per informazioni dettagliate sull'assegnazione dei bit, fare riferimento alla tabella seguente.
Campo opzioni
D7 D6 D5 D4 D3 D2 D1 D0
00000000
D15 D14 D13 D12 D11 D10 D9 D8
00000000
95
Page 98

4.5 Campo dati di comando
4.5.3 Specifiche campo di stato: STATUS
Il campo di stato viene utilizzato per monitorare lo stato del servo con l'area riservata al terzo
e al quarto byte dei comandi principali.
Per informazioni dettagliate sull'assegnazione dei bit, fare riferimento alla tabella seguente.
Campo di stato
D7 D6 D5 D4 D3 D2 P1 D0
PSET ZPOINT − PON SVON CMDRDY WARNG ALM
D15 D14 D13 D12 D11 D10 D9 D8
−−N_SOT P_SOT NEAR L_CMP T_LIM DEN
Allarme (ALM)
Indica che è stato generato un allarme.
D0 Stato
0
Nessun allarme (normale)
1
È stato generato un allarme.
Avviso (WARNG)
Indica che è stato generato un avviso.
P1 Stato
0
Nessun avviso (normale)
1
È stato generato un avviso.
Comando pronto (CMDRDY)
Indica se è possibile o meno ricevere un comando.
Se il SERVOPACK si trova nello stato di occupato, non è possibile ricevere alcun comando.
Il SERVOPACK continua l'esecuzione del comando ricevuto in precedenza.
D2 Stato
0
Non è possibile ricevere il comando (occupato).
1
È possibile ricevere il comando (pronto).
Servo ON (SVON)
Indica lo stato ON/OFF del servo.
D3 Stato
0
Servoazionamento OFF
1
Servoazionamento ON
96
Page 99

Alimentazione principale ON (PON)
Indica lo stato dell'alimentazione principale.
D4 Stato
0
Alimentazione principale OFF
1
Alimentazione principale ON
4.5 Campo dati di comando
INFORMAZIONI
D4 rimane impostato su 0 e l'alimentazione principale viene disattivata per un massimo di 300 ms.
Posizione principale (ZPOINT)
Indica se la posizione di retroazione (APOS) rientra o meno nell'intervallo dell’origine.
Intervallo posizione
principale
Sistema di coordinate
della macchina APOS
Posizione principale (0)
D6 Stato
0
La posizione di retroazione (APOS) rientra nell'intervallo dell’origine.
1
La posizione di retroazione (APOS) non rientra nell'intervallo dell’origine.
È possibile impostare l'intervallo dell’origine nel seguente parametro.
L'impostazione verrà immediatamente scritta nel SERVOPACK.
Nr. parametro Nome Dimensioni
dati
Pn803 Intervallo
INFORMAZIONI
posizione
principale
Una volta completate le seguenti operazioni, si dovrebbe rilevare un segnale ZPOINT.
In caso contrario, l'operazione non è stata completata correttamente.
1. Funzione di ricerca di origine (ZRET)
2. Impostazione delle coordinate dopo aver impostato il punto di riferimento (REFE = 1)
utilizzando POS_SET (impostazione coordinate)
2 byte 0 250 Unità
Val ore
min.
impostato
All'interno dell'intervallo.
Ampiezza posizione
principale (Pn803)
Val ore
max.
impostato
Moduli Impostazione
di riferimento
di fabbrica
10
97
Page 100

4.5 Campo dati di comando
Posizionamento completato (PSET)
Indica il completamento del posizionamento.
Gamma di completamento
del posizionamento
Sistema di coordinate
della macchina APOS
Posizione di riferimento
D7 Stato
0
Diverso dallo stato 1.
1
Il completamento dell'invio (DEN = 1) e la posizione di retroazione (APOS)
rientrano nella gamma completa di posizionamento.
Ampiezza completamento
posizionamento (Pn522)
È possibile impostare l'ampiezza di completamento del posizionamento nel seguente parametro.
L'impostazione verrà immediatamente scritta nel SERVOPACK.
Nr. parametro Nome Dimensioni
Pn522 Ampiezza
completamento posizionamento
dati
4 byte 0 1073741824 Unità di
Val ore
min.
impostato
All'interno dell'intervallo.
Val ore
max.
impostato
riferimento
Moduli Impostazione
di fabbrica
10
98
 Loading...
Loading...