

Page 1
MEMS Thermal Sensors
D6T
User’s Manual
MEMS Thermal Sensors
A284-E1-03
Page 2
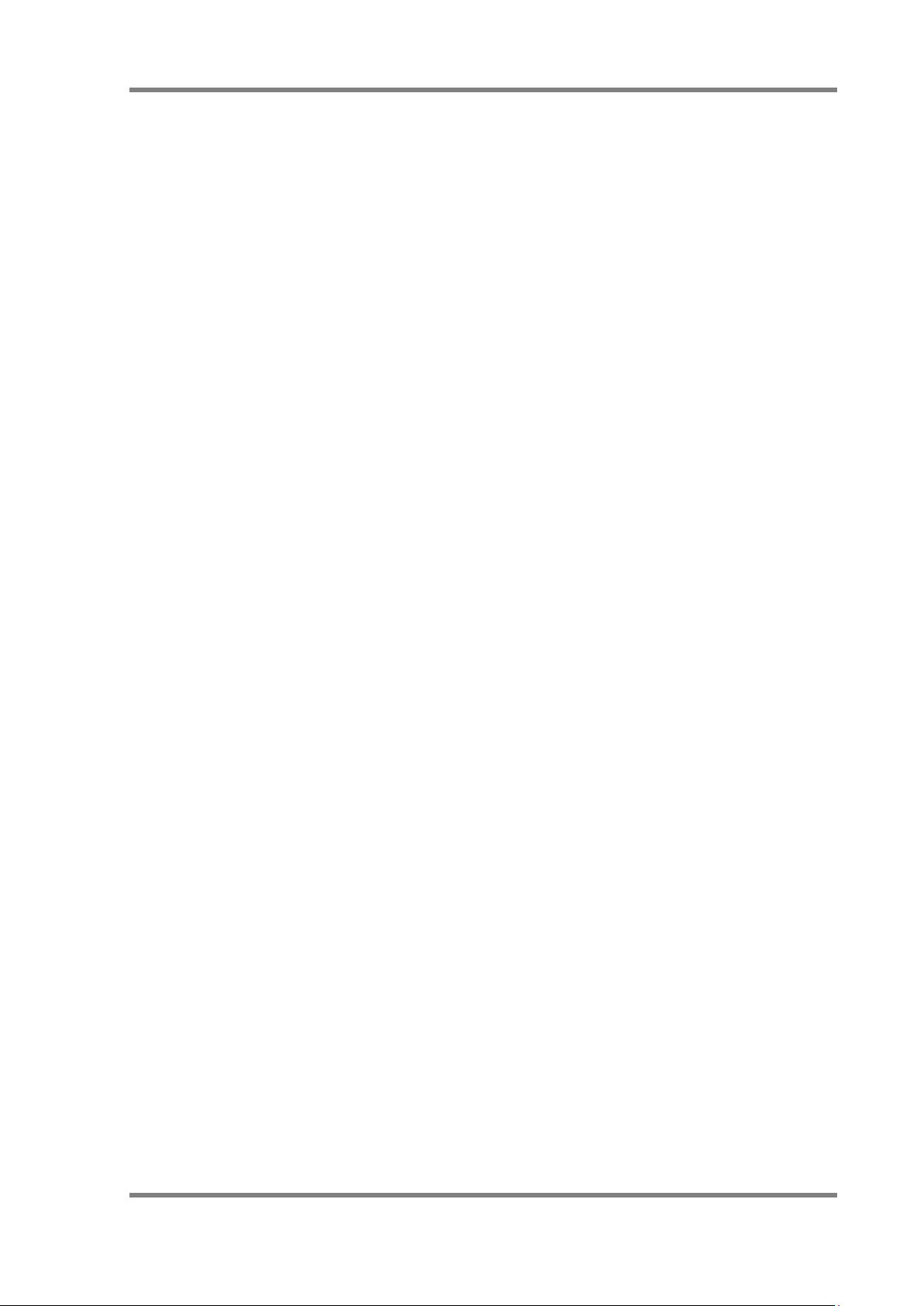
Table of Contents
1 Overview .................................................................................................................................. 2
2 Structure (Part Configuration) .................................................................................................. 2
3 External Dimensions ................................................................................................................ 2
4 Principles of Operation ............................................................................................................ 2
5 Product Features ..................................................................................................................... 3
6 Usage Procedure ..................................................................................................................... 5
6.1 Connectors ....................................................................................................................... 5
6.2 Example Electrical Connections ....................................................................................... 6
6.3 I2C Specifications ............................................................................................................. 8
6.4 Example Temperature Value Retrieval Program ............................................................. 14
6.5 Example PEC Check Routine ......................................................................................... 17
6.6 Clock Stretch (Wait) ........................................................................................................ 18
6.7 Communication Timeouts ............................................................................................... 19
6.8 Surface Cover Material ................................................................................................... 19
6.9 Sensor Securement ........................................................................................................ 20
7 FAQ ....................................................................................................................................... 21
8 Definition of Terms ................................................................................................................. 22
1 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 3
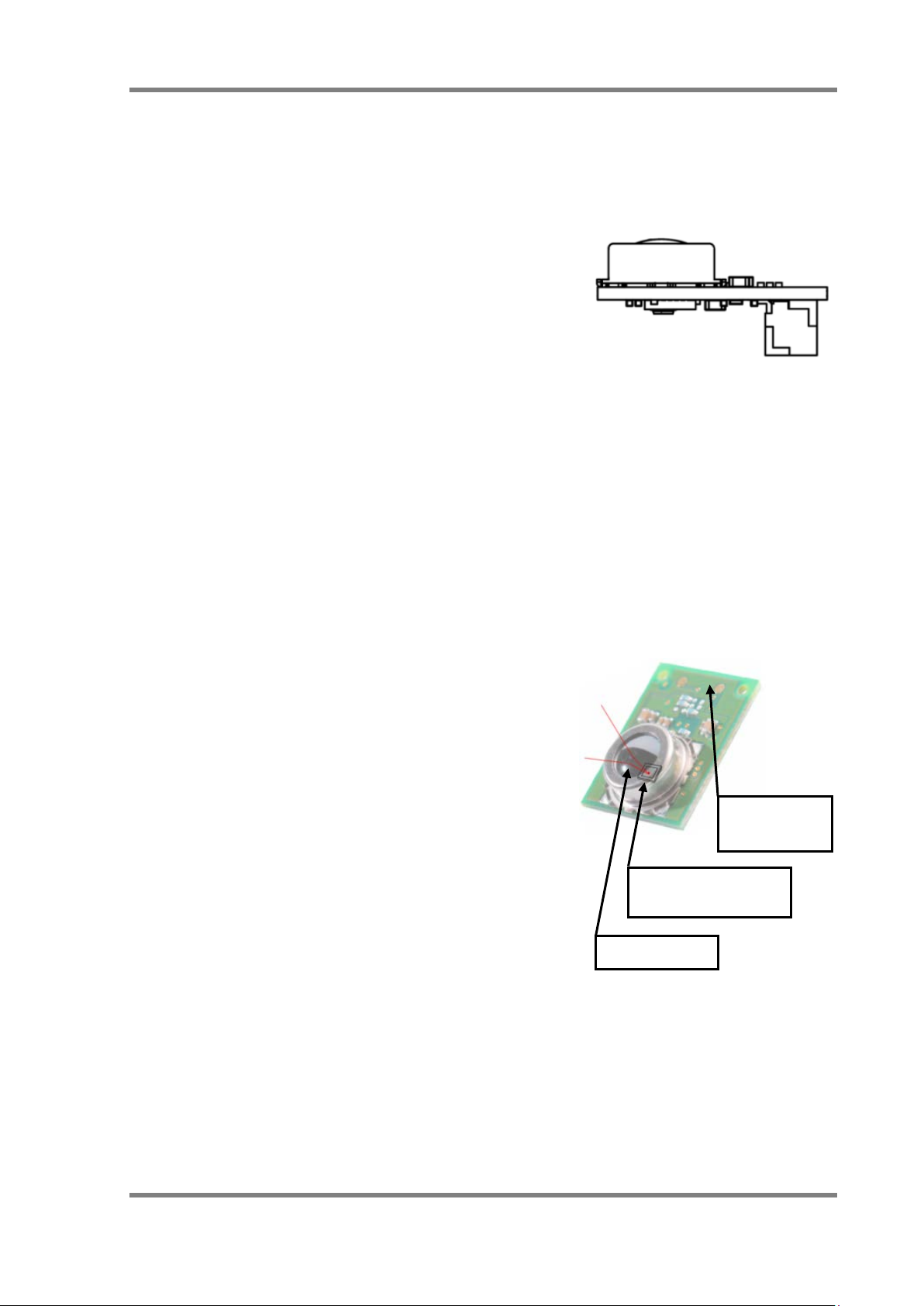
Fig. 2. Module Configuration
1 Overview
This user manual describes the usage procedures, precautions, and other information regarding
D6T-series MEMS Thermal Sensors. This document also serves as a supplement to the product
catalog. Reference this document together with the product catalog when using this device.
2 Structure (Part Configuration)
The D6T series of MEMS Thermal Sensors consists of a
small circuit board onto which a silicon lens, thermopile
sensor, specialized analog circuit, and logic circuit for
conversion to a digital temperature value are arranged.
This product only requires one connector to connect
Fig. 1. Exterior of Module (Reference)
these modules.
3 External Dimensions
This product features a circuit board size of 14 mm x 18 mm. An even more compact size of
11.6 mm x 12 mm is also available. Refer to the product catalog for more information on
mounting areas and positioning of the circuit board. Refer to Chapter 6 for more information on
compatible connectors.
4 Principles of Operation
The following list describes an overview of the measuring
operation of the MEMS Thermal Sensors.
· The silicon lens focuses radiant heat (far-infrared
rays) emitted from objects onto the thermopile sensor
in the module. (*1)
· The thermopile sensor generates electromotive force
in accordance with the radiant energy (far-infrared
rays) focused on it.
· The values of this electromotive force and the internal
thermal sensor are measured. Then, the device
calculates the measured value (temperature of the
(Interior side)
Thermopile sensor
object) via an interpolation calculation that compares
the measured values with an internally stored lookup
Silicon lens
table. (*2)
· The measured value is output via the I2C bus, and read
using a host system.
(*1) The D6T-1A-01/02 models use a silicon filter.
(*2) D6T-1A-01/D6T-1A-02/D6T-8L-09 use a temperature conversion circuit in the ASIC
to calculate measured values (temperatures of objects).
(Back side)
I2C connector
D6T MEMS Thermal Sensors User’s Manual (A284) 2
Page 4
Pyroelectric Sensor
Thermal Sensor
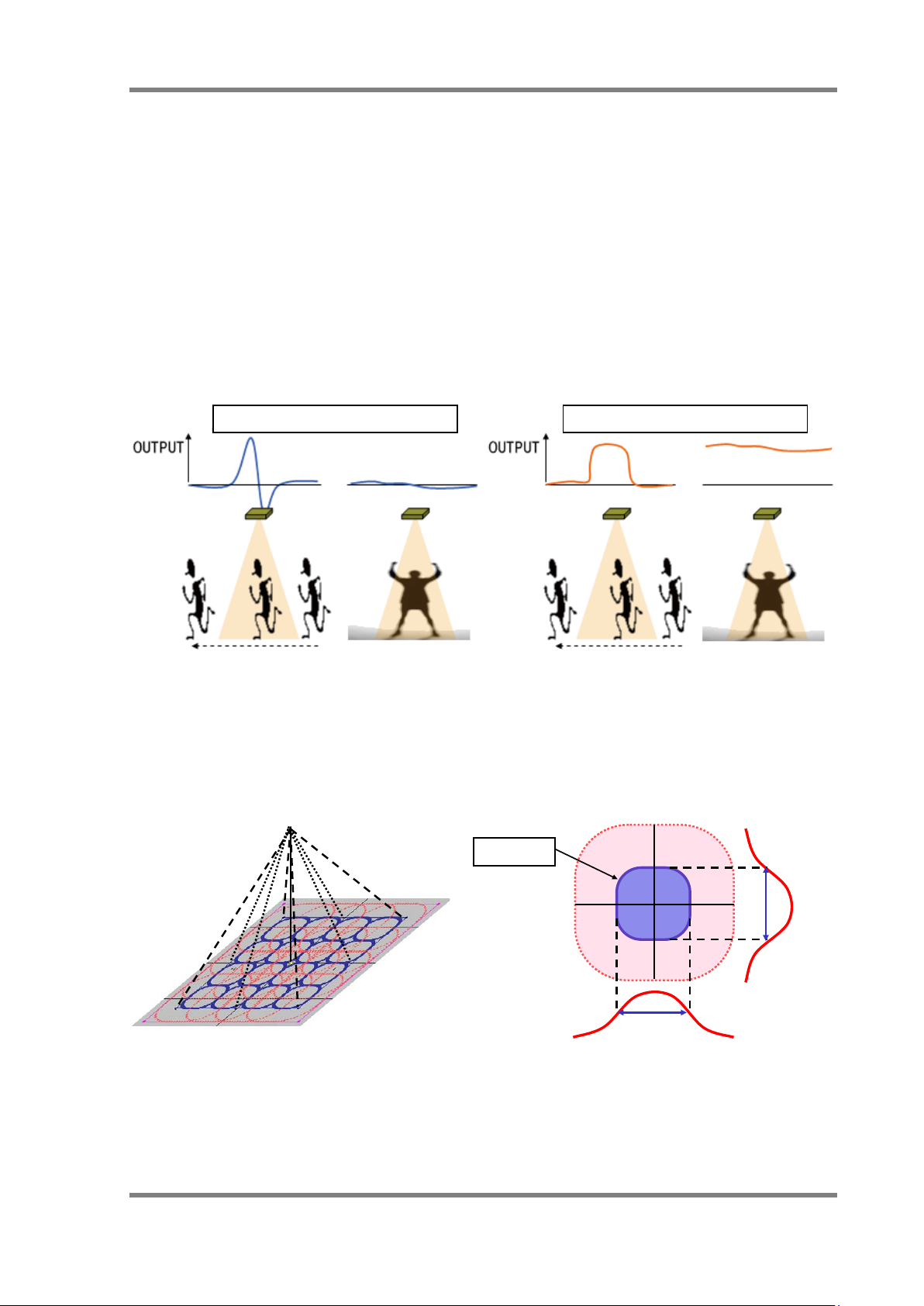
FOV (16-channel)
50%
FOV and XY-axis sensitivity characteristics
5 Product Features
MEMS Thermal Sensors measure the surface temperature of objects. The D6T-44L-06 model
features 16 channels in a 4 x 4 arrangement. The D6T-8L-09 features a single 8-channel array.
The D6T-1A-01/-02 models feature a 1-channel sensor chip. The module has been optimized by
placing the specialized downstream processing circuit adjacent to the sensor chip to achieve
low-noise temperature measurements.
Using our MEMS Thermal Sensors as a human sensor eliminates the problems in using
conventional pyroelectric sensors to detect the presence of people. Pyroelectric sensors can be
used to detect movement of people based on the principle of detecting change components of
infrared rays, but the measurement signal is lost during times of no movement. Conversely,
Thermal Sensors continue to generate a measurement signal during times of no movement.
(a) Output of pyroelectric sensor (b) Output of Thermal Sensor
Fig. 3. Difference Between MEMS Thermal Sensor and Pyroelectric Sensor
MEMS Thermal Sensors feature a silicon lens optically designed to have specific sensitivity
characteristics. Our Thermal Sensors feature the same field of view (FOV) at a maximum
sensitivity of 50% as general sensors.
FOV
Maximum sensitivity of
(b)
(a) Conceptual illustration of D6T-44L-06
Conceptual illustration of single-element
Fig. 4. Field of View (FOV) and Sensitivity Characteristics Illustrations
3 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 5

Distance: Close <<<<< Far
The sensitive areas of elements are wider than the FOV-specification width. If the size of the
measured object is smaller than the sensitive area of an element, the background temperature of
objects other than the intended object will become a factor.
Our Thermal Sensors use a reference heat source (a blackbody furnace) to correct temperature
values. However, note that differences in emissivity due to composition of measured objects, surface
shape, and the occupancy ratio of objects within sensitive areas all affect temperature values.
Fig. 5. Distance as Factor of Fluctuations in Temperature Values
The measurable area (FOV) enlarges as the distance between the measured object increases.
The occupancy ratio of objects (people) in the FOV reduces as the distance increases. For this
reason, as the distance increases, the temperature values become more a representation (level of
influence) of the background temperature than the temperature of the intended object (people). In
other words, to correctly measure temperature of the intended objects, the measured object must
be sufficiently larger than the FOV area.
Using a MEMS Thermal Sensor as a human sensor is limited to close-distance applications for
simple determination of temperature value only. To increase the detection distance, determination
accuracy must be improved through software processing that factors temporal changes, position
of heat sources, human behavior information, and so on.
D6T MEMS Thermal Sensors User’s Manual (A284) 4
Page 6
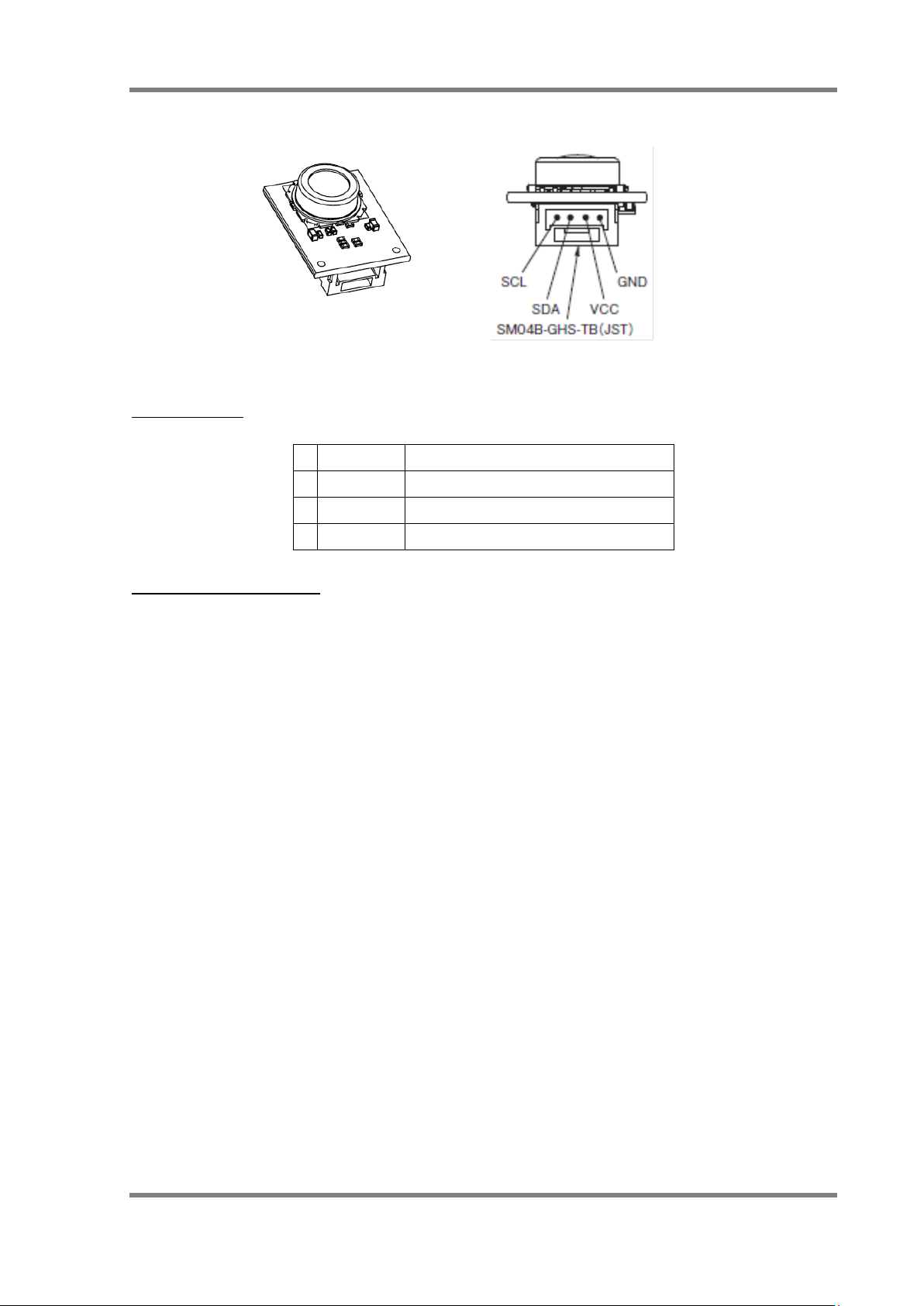
1
GND
GND power supply pin
2
VCC
VCC power supply pin (5 V ±10%)
3
SDA
I2C (5 V) data
4
SCL
I2C (5 V) clock
6 Usage Procedure
6.1 Connectors
Connector Pins
Fig. 6. Product Exterior (Reference)
Table 1. Connector Pin Table
Connector Parts Materials
Connector part model: SM04B-GHS-TB (JST)
Contact: SSHL-002T-P0.2 (JST)
Housing: GHR-04V-S (JST)
The lens height and circuit board size varies by model. Refer to the product catalog for more
information on dimensions. Use a 4-pin connector as described above to connect this module to
systems.
5 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 7
D6T
VCC
SDA
SCL
GND
VDD
SDA
SCL
GND
MCU
R
R
5V3V
D6T
VCC
SDA
SCL
GND
VDD
SDA
SCL
GND
MCU
R
R
I2C
Level
Translating
R
R
5V
Ex. PCA9517
D6T
VCC
SDA
SCL
GND
VDD5
SDA
SCL
GND
MCU
Power
circuit
5V
GND
R
I2C
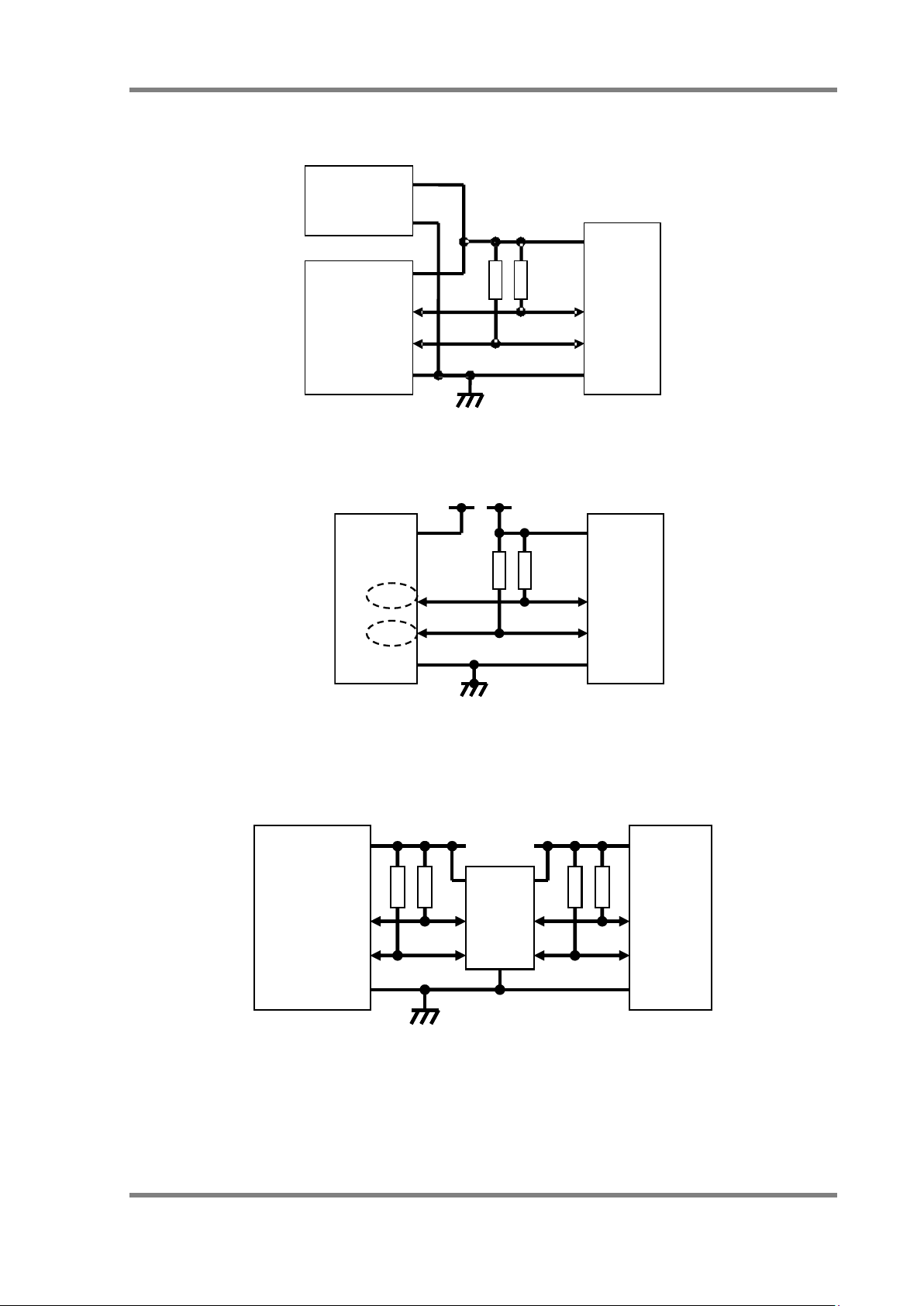
6.2 Example Electrical Connections
Scenario 1: 5 V MCU Direct Connection (Same voltage as the microcontroller power supply)
R
Fig. 7. Connecting to 5 V Microcontroller
Scenario 2: 3 V MCU (I2C port is 5 V fault tolerant)
Fig. 8. 5 V Fault Tolerant Specification
Scenario 3: Using an I2C Level Converter
(Not a 5 V fault tolerant specification, or other devices are also connected to
the 3 V I2C bus)
level
converter
Fig. 9. Using a Level Converter
D6T MEMS Thermal Sensors User’s Manual (A284) 6
Page 8
MCU
R
FF
OpenDrain
SDA
SCL
R
FF
OpenDrain
SDA
SCL
D6T
VCC
SDA
SCL
GND
VDD
SDA
SCL
GND
MCU
R
R
I2C bus
switch
R
R
5V
R
R
D6T
VCC
SDA
SCL
GND
:
SDA 0
SCL 0
SDA x
SCL x
SDA 1
SCL 1
SDA 2
SCL 2
I2C
bus
IC
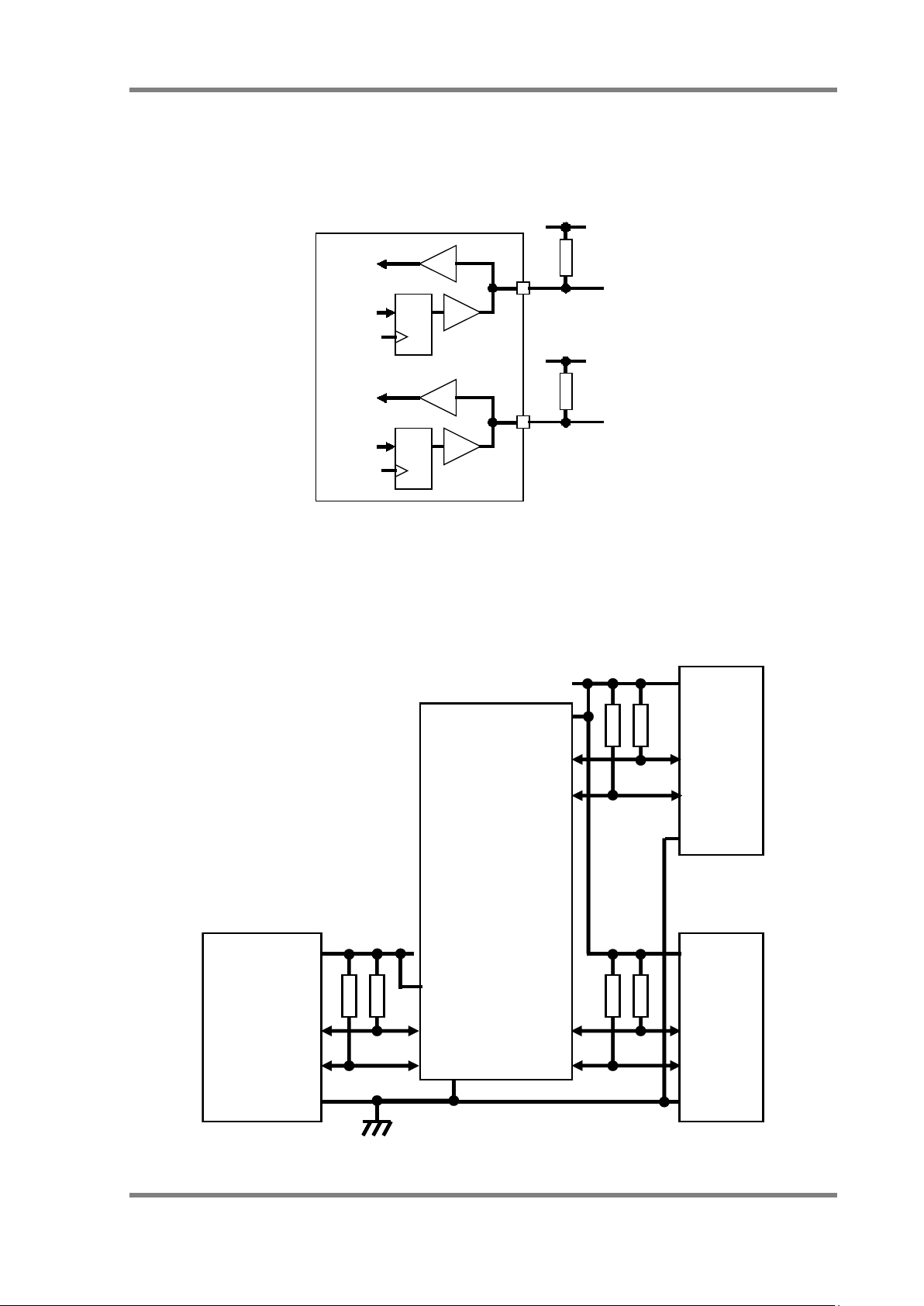
Scenario 4:
Scenario 5: Using an I2C Bus-Switching IC (Connecting multiple D6T sensors)
Using a Bidirectional Open-Drain GPIO Terminal and Performing I2C Communication
Processing in Software
(MCU does not have built-in I2C functionality)
* Note: Clock stretch support is required (refer to section 6.6).
Fig. 10. Using a GPIO Terminal
(This sensor cannot change slave addresses)
* Most bus-switching ICs also have power voltage conversion functionality.
-switching
7 D6T MEMS Thermal Sensors User’s Manual (A284)
Fig. 11. Using an I2C Bus-Switching IC
Page 9

Pull-up Resistance Values
(Check the I2C specifications. In most cases, the range is set to approximately 3 k to 10 kΩ.)
8-bit (with R/W bit) expression: Read: 15 h, Write: 14 h
Data bit length
8 bits (MSB-first)
Clock speed
Max. 100 kHz, For D6T-32L only 1000 kHz (Fast-Mode Plus)
software-based I2C)
Output data : 35 bytes
Values will be adjusted per user calculations of specific usage conditions such as
wiring capacitance.
6.3 I2C Specifications
Refer to the following table for information on communication specifications
Table 2. I2C Port Settings Parameter
Slave address
Clock stretch support All models excluding D6T-1A-01, D6T-1A-02, and D6T-8L-09
7-bit (0001_010b)
(*Refer to section 6.5 for more information on using
Fig. 12. I2C Data Line Flow (D6T-44L-06(16ch))
* This data is used to perform the Read operation to confirm that the configuration of internal
registers in this product have been updated. This Read operation can be skipped.
Fig. 13. I2C Data Line Flow (D6T-8L-09(8ch))
D6T MEMS Thermal Sensors User’s Manual (A284) 8
Page 10

Start
Address
W
Command
W (4Dh)
Repeat
Srart
Address
R
P
TAT
(Lo)
PTAT
(Hi)
P0
(Lo)
P0
(Hi)
P1022
(Lo)
P
1022
(Hi)
P1023
(Lo)
P1023
(Hi)
PEC Stop
Output data : 2051 bytes
P1 to P1021
(Lo,Hi)
Fig. 14. I2C Data Line Flow (D6T-1A-01/D6T-1A-02(1ch))
Fig. 15. I2C Data Line Flow (D6T-32L-01A(1024ch))
Note: The command is 4Dh for the D6T-32L-01A only.
9 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 11

PTAT
Reference temperature data stored in the sensor
P0 to P15
(D6T-44L-06
P0 to P7
(D6T-8L-09)
P0
(D6T-1A-01)
(D6T-1A-02)
P0 to P1023
(D6T-32L-01A)
Table 3. Content of Received Data (Output Data)
The PTAT and Pn temperature data represents values equal to
temperature values (°C) multiplied by a factor of 10 as signed 16-bit
integers
Bit D15 is the sign bit.
25.0°C = 250 (High-byte data = 0x00, Low-byte data = 0xFA)
-25.0°C = -250 (High-byte data = 0xFF, Low-byte data = 0x06)
Refer to the following figures for illustrations of temperature data for each
)
pixel (8- and 16-channel arrangements)
D6T-44L-06 (16ch) D6T-8L-09 (8ch)
D6T-1A-01/-02 (1ch) D6T-32L-01A (1024ch)
PEC Packet error check code.
(Refer to section 6.4 and the "SMBus" specifications for details)
D6T MEMS Thermal Sensors User’s Manual (A284) 10
Page 12

Signal Chart
(The D6T-1A-01/-02 models lack P1 through P15)
Fig. 16. Signal Terminal Flow (D6T-1A-01/-02/44L-06)
“S” : Start Condition
“Sr” : Repeat Start Condition
“P” : Stop Condition
“W/R” : Write (Lo) / Read (Hi)
“ACK” : Acknowledge reply
“NACK” : No-acknowledge reply
* Refer to the I2C bus specifications for the definitions of these I2C terms.
11 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 13

SCL
S
W Command[7:0](0x02) Command[7:0](0x00)
SDA
Slave address [6:0] ( 0x0A)
Command[7:0](0x01) Command[7:0](0xEE)
P
S P
S P
S P
S P
S
W Command[7:0](0x02)
Slave address [6:0] ( 0x0A)
Sr
Command[7:0](0x00) Command[7:0](0x00)
P
Slave address [6:0] ( 0x0A)
S Sr P
S Sr P
Command[7:0]
(0x00)
Command[7:0]
(0x07)
Command[7:0]
(0xE9)
Slave address [6:0]
(0x0A) + W
Command[7:0]
(0x05)
Slave address [6:0]
(0x0A) + R
Command[7:0]
(0x90)
Command[7:0]
(0x3A)
R
Command[7:0]
(0x97)
Slave address [6:0]
(0x0A) + W
Command[7:0]
(0x03)
Command[7:0]
(0x00)
Command[7:0]
(0x03)
Command[7:0]
(0x8B)
Slave address [6:0]
(0x0A) + W
Command[7:0]
(0x05)
Command[7:0]
(0x90)
Command[7:0]
(0x3A)
Command[7:0]
(0xB8)
750ms ec w ait
Slave address [6:0]
(0x0A) + W
Command[7:0]
(0x03)
Command[7:0]
(0x00)
Command[7:0]
(0x07)
Slave address [6:0]
(0x0A) + W
Command[7:0]
(0x02)
Command[7:0]
(0x00)
Command[7:0]
(0x00)
Slave address [6:0]
(0x0A) + W
Command[7:0]
(0x03)
Slave address [6:0]
(0x0A) + R
ACK
ACK
ACK
ACK
ACK
ACK
ACK
NACK
ACK
ACK
Before performing the processing illustrated in Fig. 16, perform the following processing for
D6T-8L-09 models at least 20 msec after power is supplied to the module. This processing should
only be performed when power is first turned on.
Fig. 17. Signal Terminal Flow (D6T-8L-09)
D6T MEMS Thermal Sensors User’s Manual (A284) 12
Page 14

Register Address
Default
Function (Write Data)
0x00
0x00
b7(WR) : Stop b6-b1 : (reserved) b0(R) : Data Ready
0x01
0x04
b7-b4(WR) : IIR coefficient(0 to 15)
0x02
0x14
b7-b0(WR) : Cycle time[x10ms]
Z
1/C
C-1
+
-1
SCL
SDA
S
ACK
ACK
Sr
slave address[6:0] (0x0A)
ACK
W
Command[7:0] (0x4D)
R
slave address[6:0] (0x0A)
ACK
ACK
NACK
PEC data[7:0]
P
P1023 Low Byte[7:0]
P1023 Hign Byte[7:0]
ACK
ACK
PTAT Low Byte[7:0]
ACK
ACK
PTAT High Byte[15:8]
P0 Low Byte[7:0]
P0 High Byte[15:8]
Stop
Write Data
Ack
Slave Address W
Ack
Start Registor Address
Ack
Master
Slave
Fig. 18. Signal Terminal Flow (D6T-32L-01)
Fig. 19. Start/Stop Conditions
On the D6T-32L-01A, the settings in Table 4 can be changed. Before performing the processing in
Fig. 19, perform the processing below at least 20 msec after supplying power to the product. Only
perform this processing at power startup.
Fig. 20. Write (D6T-32L-01)
Table 4. Register map (D6T-32L-01)
b3-b0(WR) : Average(0 to 10)
The IIR filter coefficient can be set to 0 (through) or a value from 1 to 15.
Taking C to be 4 times the set value, the equation is Y= ((C-1) × Yold + X)/C.
Fig. 21. IIR filter
13 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 15
// I2C communication functions
6.4 Example Temperature Value Retrieval Program
(16-channel D6T-44L-06 / 1024ch D6T-32L-01A)
extern void I2C_start();
extern void I2C_repeatstart();
extern void I2C_stop();
extern void I2C_send1( char addr8 , char cmd );
extern void I2C_getx( char addr8 , char buff[] , int length );
extern int D6T_checkPEC( char buf , int pPEC );
// Global var.
extern char readbuff[35];
extern int tPTAT;
extern int tP[16];
extern int tPEC;
int D6T_getvalue()
{
I2C_start();
I2C_send1( 0x14 , 0x4C ); // 14h = { 0Ah(Addr7) : Write(0b) }
I2C_repeatstart();
I2C_getx( 0x15 , readbuff , 35 ); // 15h = { 0Ah(Addr7):Read },35 = 2*(1+16)+1
I2C_stop();
If(!D6T_checkPEC(readbuff,34)){
return - 1; // error
}
tPTAT = 256*readbuff[1] + readbuff[0];
tP[0] = 256*readbuff[3] + readbuff[2];
tP[1] = 256*readbuff[5] + readbuff[4];
tP[2] = 256*readbuff[7] + readbuff[6];
tP[3] = 256*readbuff[9] + readbuff[8];
tP[4] = 256*readbuff[11] + readbuff[10];
tP[5] = 256*readbuff[13] + readbuff[12];
tP[6] = 256*readbuff[15] + readbuff[14];
tP[7] = 256*readbuff[17] + readbuff[16];
tP[8] = 256*readbuff[19] + readbuff[18];
tP[9] = 256*readbuff[21] + readbuff[20];
tP[10] = 256*readbuff[23] + readbuff[22];
tP[11] = 256*readbuff[25] + readbuff[24];
tP[12] = 256*readbuff[27] + readbuff[26];
tP[13] = 256*readbuff[29] + readbuff[28];
tP[14] = 256*readbuff[31] + readbuff[30];
tP[15] = 256*readbuff[33] + readbuff[32];
tPEC = readbuff[34];
return 1;
}
measure()
{
n = 0;
do{
status = D6T_getvalue();
n++;
}while(status < 0 && n < LOOPLIMIT);
If(status < 0){
// error operation.
}
printf(“%d, %d,%d,%d,%d,%d,%d,%d,%d ,%d,%d,%d,%d,%d,%d,%d,%d ,%d\ n”,
tPTAT,tP[0],tP[1],tP[2],tP[3],tP[4],tP[5],tP[6],tP[7]
,tP[8],tP[9],tP[10],tP[11],tP[12],tP[13],tP[14],tP[15],tPEC);
}
* For the D6T-32L-01A, add tP[xx] up to 1023.
* This example program is configured only with functions from the standard I2C operations library.
Replace library functions with similar ones available in the microcontroller used in your system
when testing this program.
D6T MEMS Thermal Sensors User’s Manual (A284) 14
Page 16

int D6T_getvalue()
Example Temperature Values (PTAT, P0, P1, …, P15, and PEC in order from the left)
223 ,224,224,273,335,239,221,240,297 ,264,232,221,254,299,258,229,233 ,80
223 ,271,261,265,304,284,270,264,274 ,302,285,271,260,319,304,286,269 ,193
223 ,296,273,285,311,306,291,281,301 ,311,310,293,296,312,322,311,302 ,83
(Changed sections for the 1-channel D6T-1A-01/D6T-1A-02)
{
I2C_start();
I2C_send1( 0x14 , 0x4C ); // 14h = { 0Ah(Addr7) : Write(0b) }
I2C_repeatstart();
I2C_getx( 0x15 , readbuff , 5 ); // 15h = { 0Ah(Addr7):Read },5 = 2*(1+1)+1
I2C_stop();
If(!D6T_checkPEC(readbuff,4)){
return - 1; // error
}
tPTAT = 256*readbuff[1] + readbuff[0];
tP[0] = 256*readbuff[3] + readbuff[2];
tPEC = readbuff[4];
return 1;
}
PTAT = 22.3°C, P0 = 29.6°C, P1 = 27.3°C, P2 = 28.5°C, P3 = 31.1°C, etc.
* With this example temperature program, only one set of measurements are retrieved.
* In the case of standard specifications, this sensor updates temperature data every 300 ms
or less. This operation is independent of any communication processing. Temperature
update timing cannot be controlled externally.
* With this example temperature program, only one set of measurements are retrieved.
* In the case of standard specifications, this sensor updates temperature data every 100 ms
or less. This operation is independent of any communication processing. Temperature
update timing cannot be controlled externally.
15 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 17

int D6T_getvalue()
}
(Added sections for the 8-channel D6T-8L-09)
{
I2C_start();
I2C_send( 0x14 , 0x02 , 0x00 , 0x01 , 0xEE );
I2C_stop();
I2C_start();
I2c_send ( 0x14 , 0x05 , 0x90 , 0x3A , 0xB8 ) ;
I2C_stop();
I2C_start();
I2c_send ( 0x14 , 0x03 , 0x00 , 0x03 , 0x8B ) ;
I2C_stop();
I2C_start();
I2c_send ( 0x14 , 0x03 , 0x00 , 0x07 , 0x97 ) ;
I2C_stop();
I2C_start();
I2c_send ( 0x14 , 0x02 , 0x00 , 0x00 , 0xE9 ) ;
I2C_stop();
I2C_start();
I2C_send( 0x14 , 0x02 );
I2C_repeatstart();
I2C_send( 0x15 );
I2C_get( 0x15 , readbuff , 2 ); // Expected value of 2 byte read is 0x00 and 0x00.
I2C_stop();
I2C_start();
I2c_send( 0x14 , 0x05 );
I2C_repeatstart();
I2C_send( 0x15 );
I2C_get( 0x15 , readbuff , 2 ); // Expected value of 2 byte read is 0x90 and 0x3A.
I2C_stop();
I2C_start();
I2C_send( 0x14 , 0x03 );
I2C_repeatstart();
I2C_send( 0x15 );
I2C_get( 0x15 , readbuff , 2); // Expected value of 2 byte read is 0x00 and 0x07.
I2C_stop();
I2C_start();
I2C_send1( 0x14 , 0x4C ); // 14h = { 0Ah(Addr7) : Write(0b) }
I2C_repeatstart();
I2C_getx( 0x15 , readbuff , 19 ); // 15h = { 0Ah(Addr7):Read },19 = 2*(1+8)+1
I2C_stop();
If(!D6T_checkPEC(readbuff,18)){
return - 1; // error
}
tPTAT = 256*readbuff[1] + readbuff[0];
tP[0] = 256*readbuff[3] + readbuff[2];
tP[1] = 256*readbuff[5] + readbuff[4];
tP[2] = 256*readbuff[7] + readbuff[6];
tP[3] = 256*readbuff[9] + readbuff[8];
tP[4] = 256*readbuff[11] + readbuff[10];
tP[5] = 256*readbuff[13] + readbuff[12];
tP[6] = 256*readbuff[15] + readbuff[14];
tP[7] = 256*readbuff[17] + readbuff[16];
tPEC = readbuff[18];
return 1;
* With this example temperature program, only one set of measurements are retrieved.
* In the case of standard specifications, this sensor updates temperature data every 250 ms
or less. This operation is independent of any communication processing. Temperature
update timing cannot be controlled externally.
D6T MEMS Thermal Sensors User’s Manual (A284) 16
Page 18

unsigned char calc_crc( unsigned char data )
}
int D6T_checkPEC( char buf , int pPEC );
}
6.5 Example PEC Check Routine
PEC represents CRC-8 error check data. This data is appended to the end of communication
output. The user can use the PEC value to detect communication errors and improve data
reliability.
(Refer to SMBus specifications for more information)
{
int index;
unsigned char temp;
for(index=0;index<8;index++){
temp = data;
data <<= 1;
if(temp & 0x80) data ^= 0x07;
}
return data;
}
int D6T_checkPEC( char buf , int pPEC );
{
unsigned char crc;
int i;
crc = calc_crc( 0x14 );
crc = calc_crc( 0x4C ^ crc );
crc = calc_crc( 0x15 ^ crc );
for(i=0;i<pPEC;i++){
crc = calc_crc( readbuff[i] ^ crc );
}
return (crc == readbuff[pPEC]);
Only the PEC read command is executed when using Stop-Start reads without the use of
RepeatStart.
{
unsigned char crc;
int i;
crc = calc_crc( 0x15 );
for(i=0;i<pPEC;i++){
crc = calc_crc( readbuff[i] ^ crc );
}
return (crc == readbuff[pPEC]);
17 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 19

I2C master
I2C slave (sensor)
a) Lo output to SCL (at each Ack timing)
SCL terminal Lo detection check
Wait complete
SCL
a)
b)
c)
d)
e)
f)
g)
MCU
D6T
6.6 Clock Stretch (Wait)
This slave (sensor) can generate a signal sent to the master (MCU) to tell the MCU to wait
before sending a request, in accordance with the temperature data state. The master must
support this wait processing. The built-in I2C module in most MCUs has automatic support for
this feature. If using MCUs that implement software-based I2C functionality using related
libraries, such as those without built-in I2C modules, you must check if this wait support
function is available in the software. If the software lacks this functionality, you must add a
wait detection routine, such as that illustrated below, to the SCL output portion of the program.
The D6T-1A-01/D6T-1A-02/D6T-8L-09 models do not feature clock stretch.
Wait Detection Routine
SDA
SCL
Requests the MCU to wait
SDA
SCL
(Fixed wait)
c) Changes SCL output to Hi-Z
d) Checks if SCL terminal is in Hi state
Check standby (LOOP)
f) Check complete (Hi detection)
g) Transitions to subsequent processing
Changes SCL terminal to input mode
Changes SCL terminal to output mode
MCU generates Lo output
D6T generates Lo output
MCU check period
b) Lo output to SCL (wait request)
Waiting ...
e) Changes SCL output to Hi-Z
:
:
If it is difficult to add a wait detection routine, add a 160 μsec wait time to the program at every Ack
timing.
D6T MEMS Thermal Sensors User’s Manual (A284) 18
Fig. 22. Wait Detection Routine
Page 20

None cover HDPE( t0.7 )
54.9%
H
DPE( t0.5 ) HDPE( t0.3 )
60.1%
71.5%
100%
No cover
6.7 Communication Timeouts
This sensor determines that a timeout has occurred and stops communication if low input
continues to be received on the SDA or SCL terminal for the following times.
· D6T-44L-06 : 1 sec
· D6T-1A-01/D6T-1A-02/D6T-8L-09 : 70 msec
When the sensor determines that a communication timeout has occurred, a NACK is returned
during a Write access operation. For Read access operations, the read value is set to FFFFh.
Using PEC for data checking enables the system to determine that read values are in error.
As such, we recommend using PEC data checking.
6.8 Surface Cover Material
Make sure that cover material used when installing the MEMS Thermal Sensor as part of an
assembly has sufficient radiant heat (far-infrared) transmissivity. A far-infrared transmissive
grade of high-density polyethylene (HDPE) is often used as a cover material due to being
relatively inexpensive and easy to mold. The rate of decay varies depending on cover
thickness, and so make the cover as thin as possible to reduce negative impact on detection
performance. However, if the cover is too thin, the internal sensor will be visible as illustrated
in the following photos.
Fig. 23. Relationship Between HDPE Thickness and Transparency (Reference)
19 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 21

6.9 Sensor Securement
Install the MEMS Thermal Sensor so that it is enclosed by casing and secured at mountable
areas.
D6T-44L-06 D6T-8L-09
D6T1A-01 / -02 D6T-32L-01A
Fig. 24. Mountable Areas (Shaded Areas)
Fig. 25. Sensor Securement (Reference)
D6T MEMS Thermal Sensors User’s Manual (A284) 20
Page 22

Question
Is it possible to increase the field of view?
multiple sensors.
Answer
The silicon lens used in this sensor allows virtually zero energy within a range of
The far-infrared rays that generates radiant heat are between 4 to 14 μm.
Question
Can the sensor distinguish between people, animals, and appliances?
to usage conditions.
sensor?
approximately 5 to 6 m.
Question
Can power consumption be reduced further?
Question
Can the 3 V drive and slave address be changed?
supplied to the sensor?
7 FAQ
Answer The FOV is set as such due to silicon lens thickness and refractive index
constraints.
Increasing the FOV per pixel would reduce temperature detection performance.
This is another reason why the FOV cannot be increased easily. To measure
temperature over a wider range, you must move the sensor in some way or install
Question Do signals emitted from infrared ray remote controllers cause the sensor to
operate incorrectly?
Answer Thermal Sensors only retrieve temperature data. This temperature data can be
Question What is the usable detection distance when using this sensor as a human
Answer This distance depends significantly on the installation conditions and performance
Answer The D6T series of sensors is not configured with a "operation mode for
visible light, having a wavelength of 1.2 μm or less, to infrared rays to pass through.
As such, infrared rays from remote controllers will not cause incorrect operation.
used in user-developed software to distinguish between different objects. The
accuracy of such determinations can be improved by developing software specific
of the determination algorithm used in conjunction with the sensor.
This distance also depends on the FOV area per thermopile sensor pixel and the
size of the intended object. However, in general, this distance would be
power-conserving sleep". As such, the power to the sensor must be shut off to
reduce power consumption.
Answer The D6T series of sensors does not feature such functionality.
Question How long does it take for the sensor to become fully operational after power is
Answer Output temperatures will be within the range of temperature accuracy within a few
seconds after power is supplied to the sensor. However, fully stable operation
takes approximately 15 minutes. (Reference value)
21 D6T MEMS Thermal Sensors User’s Manual (A284)
Page 23

8 Definition of Terms
Thermopile
A device cascaded to a thermocouple to increase voltage.
Thermocouples are arranged so that hot junctions are adjacent.
NETD (used in catalogs)
Acronym for Noise Equivalent Temperature Difference. This represents the conversion of noise
into a temperature value.
This term is often used to represent temperature resolution as the estimated minimum value by
which changes in temperature can be determined.
FOV
Acronym for Field of View. This term is used to represent the viewing angle index. This value is
often defined using a sensitivity peak of 50%.
I2C is a registered trademark of Phillips Electronics.
SMBus is a registered trademark of Intel Corporation.
D6T MEMS Thermal Sensors User’s Manual (A284) 22
Page 24

Please check each region's Terms & Conditions by region website.
OMRON Corporation
Electronic and Mechanical Components Company
Regional Contact
Americas Europe
https://www.components.omron.com/ http://components.omron.eu/
Asia-Pacific China
https://ecb.omron.com.sg/ https://www.ecb.omron.com.cn/
Korea Japan
https://www.omron-ecb.co.kr/ https://www.omron.co.jp/ecb/
© OMRON Corporation 2018-2019 All Rights Reserved.
In the interest of product improvement, specifications are subject to change without notice.
Cat. No. A284-E1-03
1019 (0718)(O)
 Loading...
Loading...