

Page 1

Users Guide
http://www.dasieee.com
e-mail: das@omega.com
RTU Series
Radio Telemetry Systems
Page 2
OMEGAnet® On-Line Service Internet e-mail
http://www.omega.com info@omega.com
Servicing North America:
USA: One Omega Drive, Box 4047
ISO 9001 Certified Stamford, CT 06907-0047
Tel: (203) 359-1660 FAX: (203) 359-7700
e-mail: info@omega.com
Canada: 976 Bergar
Laval (Quebec) H7L 5A1
Tel: (514) 856-6928 FAX: (514) 856-6886
e-mail: info@omega.ca
For immediate technical or application assistance:
USA and Canada: Sales Service: 1-800-826-6342 / 1-800-TC-OMEGASM
Customer Service: 1-800-622-2378 / 1-800-622-BESTSM
Engineering Service: 1-800-872-9436 / 1-800-USA-WHENSM
TELEX: 996404 EASYLINK: 62968934 CABLE: OMEGA
Mexico and
Latin America: Tel: (95) 800-826-6342 FAX: (95) 203-359-7807
En Espanol: (95) 203-359-7803 e-mail: espanol@omega.com
Servicing Europe:
Benelux: Postbus 8034, 1180 LA Amstelveen, The Netherlands
Tel: (31) 20 6418405 FAX: (31) 20 6434643
Toll Free in Benelux: 0800 0993344
e-mail: nl@omega.com
Czech Republic: ul. Rude armady 1868, 733 01 Karvina-Hranice
Tel: 420 (69) 6311899 FAX: 420 (69) 6311114
Toll Free: 0800-1-66342 e-mail: czech@omega.com
France: 9, rue Denis Papin, 78190 Trappes
Tel: (33) 130-621-400 FAX: (33) 130-699-120
Toll Free in France: 0800-4-06342
e-mail: france@omega.com
Germany/Austria: Daimlerstrasse 26, D-75392 Deckenpfronn, Germany
Tel: 49 (07056) 3017 FAX: 49 (07056) 8540
Toll Free in Germany: 0130 11 21 66
e-mail: info@omega.de
United Kingdom: One Omega Drive, River Bend Technology Centre
ISO 9002 Certified Northbank, Irlam, Manchester
M44 5EX, England
Tel: 44 (161) 777-6611 FAX: 44 (161) 777-6622
Toll Free in the United Kingdom: 0800-488-488
e-mail: info@omega.co.uk
It is the policy of OMEGA to comply with all worldwide safety and EMC/EMI regulations that apply. OMEGA is constantly
pursuing certification of its products to the European New Approach Directives. OMEGA will add the CE mark to every
appropriate device upon certification.
The information contained in this document is believed to be correct, but OMEGA Engineering, Inc. accepts
no liability for any errors it contains, and reserves the right to alter specifications without notice.
WARNING: These products are not designed for use in, and should not be used for, patient-connected applications.
Page 3
WARRANTY/DISCLAIMER
OMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship
for a period of 13 months from date of purchase. OMEGA Warranty adds an additional one (1)
month grace period to the normal one (1) year product warranty to cover handling and shipping
time. This ensures that OMEGAs customers receive maximum coverage on each product.
If the unit malfunctions, it must be returned to the factory for evaluation. OMEGAs Customer Service
Department will issue an Authorized Return (AR) number immediately upon phone or written request.
Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no
charge. OMEGAs WARRANTY does not apply to defects resulting from any action of the purchaser,
including but not limited to mishandling, improper interfacing, operation outside of design limits,
improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence
of having been tampered with or shows evidence of having been damaged as a result of excessive
corrosion; or current, heat, moisture or vibration; improper specification; misapplication; misuse or
other operating conditions outside of OMEGAs control. Components which wear are not warranted,
including but not limited to contact points, fuses, and triacs.
OMEGA is pleased to offer suggestions on the use of its various products. However, OMEGA neither
assumes responsibility for any omissions or errors nor assumes liability for any damages that result
from the use of its products in accordance with information provided by OMEGA, either verbal or
written. OMEGA warrants only that the parts manufactured by it will be as specified and free of
defects. OMEGA MAKES NO OTHER WARRANTIES OR REPRESENTATIONS OF ANY KIND
WHATSOEVER, EXPRESS OR IMPLIED, EXCEPT THAT OF TITLE, AND ALL IMPLIED
WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND FITNESS FOR A
PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OF LIABILITY: The remedies
of purchaser set forth herein are exclusive, and the total liability of OMEGA with respect to this
order, whether based on contract, warranty, negligence, indemnification, strict liability or otherwise,
shall not exceed the purchase price of the component upon which liability is based. In no event shall
OMEGA be liable for consequential, incidental or special damages.
CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a
Basic Component under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or
(2) in medical applications or used on humans. Should any Product(s) be used in or with any nuclear
installation or activity, medical application, used on humans, or misused in any way, OMEGA assumes
no responsibility as set forth in our basic WARRANTY / DISCLAIMER language, and, additionally,
purchaser will indemnify OMEGA and hold OMEGA harmless from any liability or damage whatsoever
arising out of the use of the Product(s) in such a manner.
RETURN REQUESTS / INQUIRIES
Direct all warranty and repair requests/inquiries to the OMEGA Customer Service Department.
BEFORE RETURNING ANY PRODUCT(S) TO OMEGA, PURCHASER MUST OBTAIN AN
AUTHORIZED RETURN (AR) NUMBER FROM OMEGAS CUSTOMER SERVICE DEPARTMENT
(IN ORDER TO AVOID PROCESSING DELAYS). The assigned AR number should then be marked
on the outside of the return package and on any correspondence.
The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent breakage in transit.
FOR WARRANTY RETURNS,
please have the following information available
BEFORE contacting OMEGA:
1. Purchase Order number under which
the product was PURCHASED,
2. Model and serial number of the
product under warranty, and
3. Repair instructions and/or specific
problems relative to the product.
OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible.
This affords our customers the latest in technology and engineering. OMEGA is a registered trademark of OMEGA
ENGINEERING, INC.
© 2002 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied, reproduced,
translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the prior written
consent of OMEGA ENGINEERING, INC.
FOR NON-W ARRANTY REPAIRS, consult
OMEGA for current repair charges. Have the
following information available BEFORE
contacting OMEGA:
1. Purchase Order number to cover the
COST of the repair,
2. Model and serial number of the product,
and
3. Repair instructions and/or specific
problems relative to the product.
Page 4
Installation/Operation/Software/Programming Manual DATAFLOW RTU
OWNER INFORMATION
FCC REGULATIONS
LICENSING
The FCC requires you to obtain a station license for your DATAFLOW RT U system before using it, but does not require an
operation license or permit.
The station licensee is responsible for ensuring that the transmitter power, frequency and deviation are within the limits
specified by the station license. The licensee is also responsible for the proper operation and maintenance of the radio
equipment. This includes checking the transmitter frequency and deviation periodically, using appropriate methods.
You will need to obtain a FCC license to operate the DATAFLOW RT U. To get a FCC license for VHF or UHF frequencies,
submit FCC application Form 600.
SAFETY STANDARDS
The FCC (with its action in General Docket 79-144, March 13, 1985), has adopted a safety standard for human exposure to
radio frequency electromagnetic energy emitted by FCC regulated equipment. OMEGA observes these guidelines, and
recommends that you do also:
• DO NOT hold the DATAFLOW RTU so the antenna is very close to or touching exposed parts of the body,
especially the face or eyes, while transmitting.
• DO NOT operate radio equipment near electrical blasting caps or in an explosive atmosphere.
• DO NOT allow children to play with any radio equipment that contains a transmitting device.
REPAIR of OMEGA products should be performed only by OMEGA authorized personnel.
( iii )
Page 5
Installation/Operation/Software/Programming Manual DATAFLOW RTU
CAUTIONS
1. ALL DIGITAL INPUTS, ANALOG INPUTS, ANALOG OUTPUTS, AND
MEASUREMENTS OF THE DATAFLOW RTU ARE REFERENCED TO
GROUND. DO NOT USE THE DATAFLOW RTU WITH EQUIPMENT
THAT REQUIRES COMPLETE ISOLATION.
2. ALL DATAFLOW RTU DIGITAL OUTPUTS ARE ISOLATED LATCHING
RELAYS. DO NOT EXCEED CONTACT RATINGS OF THESE RELAYS.
3. EXCITATION VOLTAGE AND LOAD DRIVE VARY FROM MANUFACTURER
TO MANUFACTURER. CONSULT MANUFACTURER DOCUMENTATION
BEFORE CONNECTING THE SENSORS OR INDICATORS TO THE
DATAFLOW RTU.
4. THE DATAFLOW RTU CASE IS CONNECTED TO GROUND.
5. ALL DATAFLOW RTU SYSTEMS REQUIRE AN FCC LICENSE
6. THE FREQUENCY DEVIATION IS CONTROLLED BY VARIABLE
RESISTOR R131. THIS DEVIATION ADJUSTMENT SHOULD ONLY BE
PERFORMED BY AUTHORIZED OMEGA PERSONNEL USING THE
APPROPRIATE METHODS AND TEST EQUIPMENT.
7. · DO NOT SHORT THE RED WIRE (PIN 6) OF CONNECTOR J105 TO
GROUND.
· DO NOT SHORT THE RED WIRE (PIN 5) OF CONNECTOR J101 TO
GROUND.
· IF AN INTERNAL BATTERY IS INSTALLED DO NOT SHORT THE
ORANGE WIRE (PIN 7) OF CONNECTOR J105 TO GROUND.
PERFORMING ANY OF THESE ACTIONS WILL DESTROY THE FUSE
(F101)LOCATED ON THE DATAFLOW RTU CONTROL BOARD.
8. DO NOT OPERATE THE DATAFLOW RTU WITHOUT AN ANTENNA OR
SUITABLE LOAD. TO DO SO MAY DAMAGE THE TRANSMITTER.
( iv )
Page 6
Installation/Operation DATAFLOW RTU
Installation/ Operation Table of Contents
SECTION TITLE PAGE NO.
1 Introduction A-1
2 Operation A-1
3 Microprocessor Updates A-1
4 Part Number Definition A-2
5 Accessories A-2
6 Specifications A-3
7 Control Board Schematic A-5
8 Control Board Layout A-6
9 RF Board Schematic A-9
10 RF Board Layout A-9
11 Interconnects A-9
12 Hardware Configuration A-11
13 Software Configuration A-12
14 Mounting Information A-12
15 Power A-14
16 Serial Link A-15
17 I/O Mapping A-15
18 Digital Inputs A-15
19 Digital Outputs A-16
20 Analog Inputs A-16
21 Analog Outputs A-17
22 Antennas A-19
23 Alignment A-19
24 Theory of Operation A-19
25 Voltage Charts A-21
Installation/ Operation Table of Figures
TITLE PAGE NO.
Figure A1 - Control Board Schematic A-5
Figure A2 - Control Board Top Side Parts Placement
with Reference Designators A-6
Figure A3 - Circular Connector Pin Designations A-9
Figure A4 - Mounting Hole Pattern for Fastening
Directly to the DATAFLOW RTU Case A-12
Figure A5 - Mounting Hole Pattern for Use with
Optional Mounting Bracket A-13
Figure A6 - Battery Connection Wiring Diagram A-14
Figure A7 - Connecting a Current Loop Sensor to a
DATAFLOW RTU Analog Input A-17
Figure A8 - Connecting a Current Loop Indicator to a
DATAFLOW RTU Analog Output A-18
Software/ Programming (Part B) Table of Contents B - i
( A-v )
Page 7
DATAFLOW RTU
1. INTRODUCTION
1.1 The DATAFLOW RTU from OMEGA is a complete wireless telemetry system designed to
deliver industrial instrumentation signals from a source to other instruments via radio frequency
communications. The DATAFLOW RTU allows you to access industrial measuring devices in
remote locations without running wires, installing microwave links or leasing a telephone line.
OMEGA DATAFLOW RTU and MODBUS radio communications equipment replaces these
methods.
1.2 Manual Part A is intended to provide information needed for the installation and operation of
DATAFLOW RTU systems. The intended readers are people familiar with industrial
instrumentation. A basic understanding of radio communications is helpful. The included
information is valid only for models listed on the cover.
2.
2.1 DATAFLOW RTU is a radio telemetry system. It operates on either 450-470 MHz with a
2.2 All DATAFLOW RTU systems require FCC licensing.
3.
3.1 A microprocessor, IC105, the main controlling device of a DATAFLOW RTU, is located in a
3.2 The microprocessor firmware version available when this manual was printed is Version 3.27.
OPERATION
transmitter power of 2 Watts or 5 Watts (UHF-FM), or 136 to 151 MHz, 150 to 165 MHz, 160 to
174 MHz with a transmitter power of 5 Watts (VHF-FM). An RTU system operating in the UHFFM band at 2 Watts with directional antennas and 50-foot towers has an effective range of 20
to 25 miles over level terrain. Changes in the frequency of operation, transmitter power, terrain
and antenna structure will affect the range of the link.
MICROPROCESSOR UPDATES
socket on the Control Board. Socket configuration provides ease in replacing or updating
microprocessor firmware.
(In Version 3.x, x represents the [number] designation of a minor revision.)
( A-1 )
Page 8

Installation/Operation
4. PART NUMBER DEFINITION
4.1 The following is a list of the part numbers available at the printing of this material.
RTU-X X X - X / / / /
Band Option
1 5 0 - E 136-151 MHz. RF Board (OMEGA # DTX-150-E0DD)
1 5 0 - 0 150-165 MHz. RF Board (OMEGA # DTX-150-00DD)
1 5 0 - F 160-174 MHz. RF Board (OMEGA # DTX-150-F0DD)
4 5 0 - 0 450-470 MHz. RF Board (OMEGA # DTX-450-00DD)
4 0 0 - G 400-430 MHz. RF Board (OMEGA # DTX-150-G0DD)
RTU-/ / / - / X / / /
RTU-/ / / - / / X / /
RTU-/ / / - / / / X /
RTU-/ / / - / / / / X
5. ACCESSORIES
5.1 The following list reflects available accessories.
OMEGA PART NO. DESCRIPTION
RTU-06001123 Power/ Serial Cable, 6 foot length for small (S) enclosure
RTU-06001124 User I/O Cable, 6 foot length for small (S) enclosure
RTU-25104600 Mounting Bracket for small (S) enclosure
RTU-25605100 Enclosure Cover Seal
RTU-BATNICD NiCad Rechargeable Battery Pack
RTU-BATHOLD Battery Holder
RTU-AFP-150 VHF Flexible Antenna
RTU-AFP-150H VHF Flexible Antenna for 164-174 MHz
RTU-RYA-15 VHF Directional Antenna, 6.5 dB Gain
RTU-AFP-450 UHF Flexible Antenna
RF Connection
U UHF Connector
Enclosure
S Small Enclosure
Power Option
1 One 8-cell AA battery holders (batteries not included)
2 Two 4-cell NiCad rechargeable battery packs
D No internal power
Data Encryption
C Clear
RTU-RYA-45 UHF Directional Antenna, 10 dB Gain
RTU-ROA-45 UHF Omnidirectional Antenna, 2.5 dB Gain
RTU-RAC-05 Coaxial Cable, 50 feet, RG-8A/U w/PL-250 Connectors
RTU-RAC-10 Coaxial Cable, 100 feet, RG-8A/U w/PL-250 Connectors
RTU-9/RTC-PAS Programming Cable for small (S) enclosure
RTU-PCPC Programming Cable for small (S) enclosure
RTU-PCPS-3.0 Programming software
(Version 3.03 for DOS & Windows PCs on 3.5" disk
RTU-PCPK Programming Kit
RTU-PS 1.5 Amp AC-to-DC Power supply
RPS-1 1 Amp AC to DC Power Supply
14800018-0 RTU Series Users Guide
( A-2 )
Page 9
6 SPECIFICATIONS
6.1 SYSTEM SPECIFICATIONS
FCC ID:......................................... RTU-150 - AIERIT04-150; RTU-450 - AIERIT04-450
Emission designator: 10K8FID
Digital Inputs:............................... Maximum of 6
LOW: Programmable from 0 to 5 V
HIGH: Programmable from 0 to 5 V
Digital Outputs:............................. Two (2) isolated latching relays
UL/CSA rating: 2A 30VDC
0.5A 110VDC
0.5A 125VAC
Analog Inputs: :............................. Maximum of 6
Voltage Mode Range: 0-5 VDC
Current Loop Mode Range: 0-20 mA
Resolution: 8 bits
Analog Outputs:............................ Maximum of 2
Analog Voltage Mode Range: 0-5 VDC
Current Loop Mode Range: 0-20 mA
Resolution: 8 bits
DATAFLOW RTU
Radio Communications:................. FSK, 1200 BPS, proprietary Manchester-Encoded data format
Serial Communications: ............... RS-485; 1200, 2400, 4800, or 9600 BPS; MODBUS RTU protocol;
for programming and external control
Power Requirements:..................... 10-16 VDC
300mA sleep, 100 mA receive
1.5A low power transmit, 2.5A high power transmit
Housing:........................................ Diecast Aluminum, Weather-resistant, (Enclosure S)
Dimensions (L x W x H):................ 4.5" x 3.5" x 2.2" (Enclosure option S)
Weight:.......................................... 1.4 lb. (Enclosure option S)
Operating Temperature:................. -30 to +60 degrees Centigrade
-22 to +140 degrees Fahrenheit
6.2 DTX SPECIFICATIONS
TRANSMITTER RECEIVER
Bandspread: 20 MHz Bandspread: 20 MHz
Freq. Stability: 5 PPM Freq. Stability: 5 PPM
RF Power Out: 5 W, programmable to 2 W Sensitivity: .3 mV
RF Output Z: 50 Ohms RF Input Z: 50 Ohms
Mod. Dist.: less than 4% Selectivity: 70 dB @ 30 kHz
65 dB @ 25 kHz
Mod. Input Z: 100 K Ohms Audio Dist.: less than 3%
( A-3 )
Page 10

Installation/Operation
N O T E S
.........................................................................................................................................................................
................................................................................................................................................
..............................................................................................................................................
............................................................................................................................................
...........................................................................................................................................
.................................................................................................................................................
......................................................................................................................................................
..........................................................................................................................................
..........................................................................................................................................
........................................................................................................................................
....................................................................................................................................................
..........................................................................................................................................
...........................................................................................................................................
................................................................................................................................................
......................................................................................................................................
....................................................................................................................................
........................................................................................................................................
....................................................................................................................................
.......................................................................................................................................
.............................................................................................................................................
.................................................................................................................................................
........................................................................................................................................................
..........................................................................................................................................
............................................................................................................................................
.....................................................................................................................................................
..................................................................................................................................................
............................................................................................................................................
......................................................................................................................................................
............................................................................................................................................
.............................................................................................................................................
..........................................................................................................................................
.........................................................................................................................................
.............................................................................................................................................
.................................................................................................................................................................
................................................................................................................................................
..........................................................................................................................................
.................................................................................................................................................
.......................................................................................................................................
..........................................................................................................................................
.................................................................................................................................................
.........................................................................................................................................
...........................................................................................................................................
.....................................................................................................................................
( A-4 )
Page 11
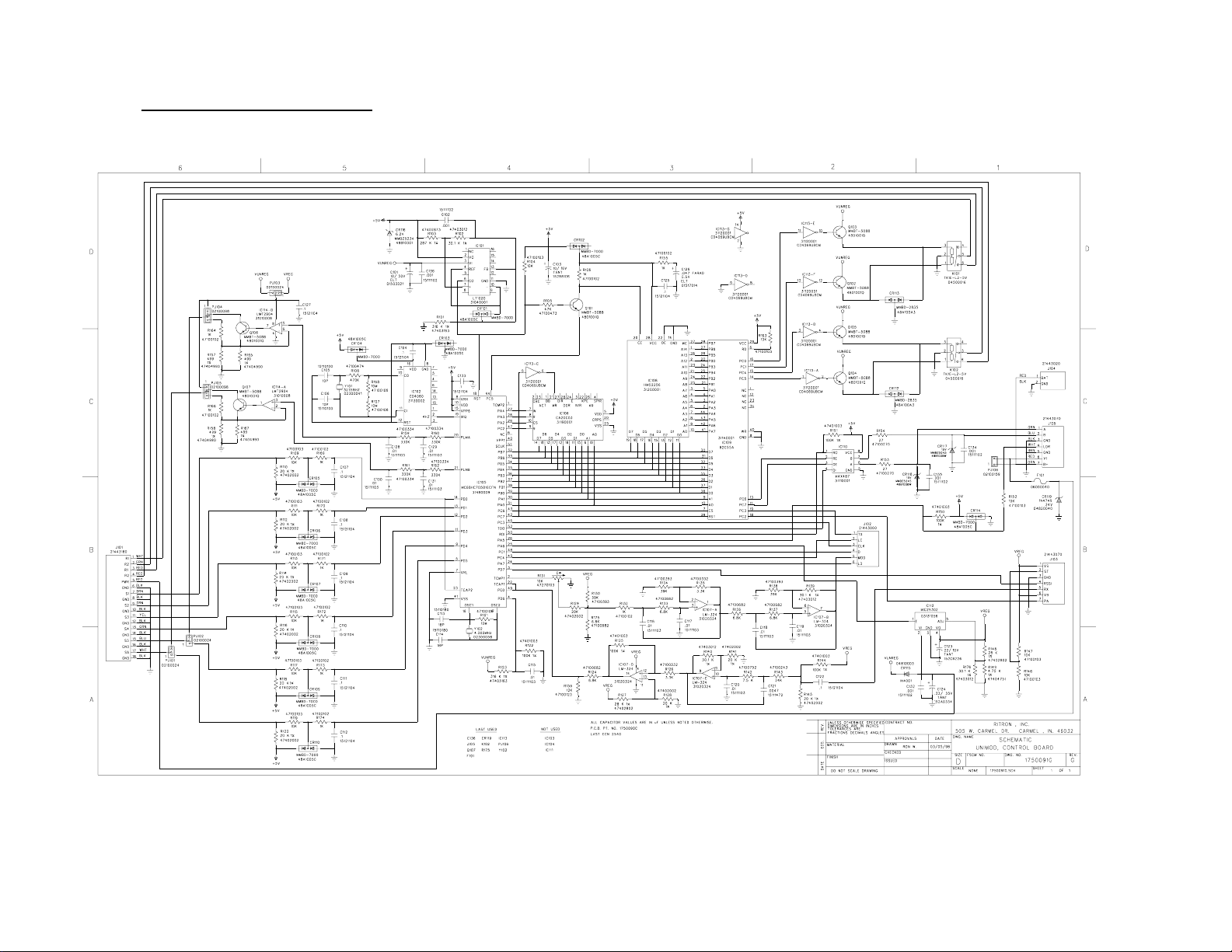
7. CONTROL BOARD SCHEMATIC
7.1 The following is the DATAFLOW RTU Control Board schematic.
Figure A1 - Control Board Schematic
( A-5 )
Page 12
Installation/ Operation
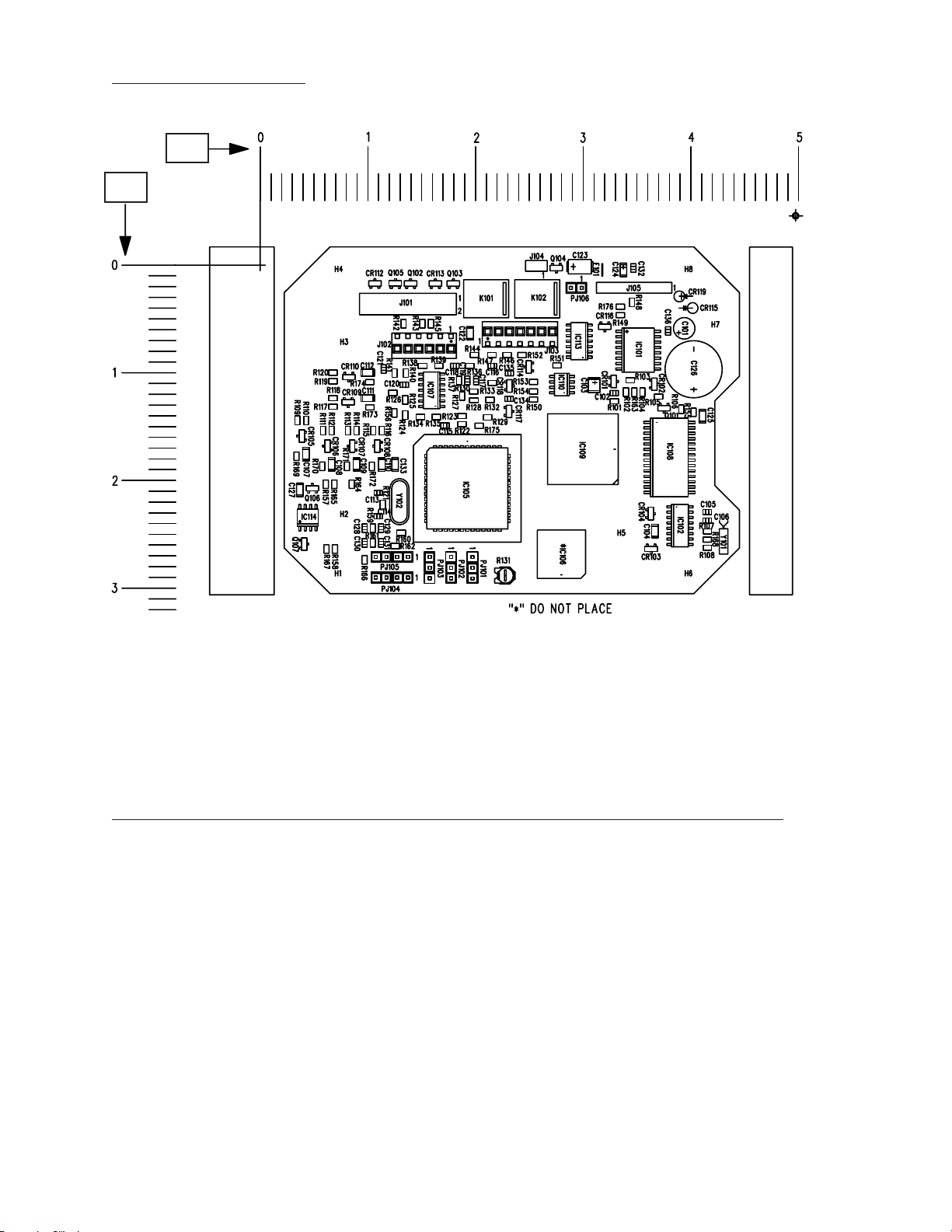
8. CONTROL BOARD LAYOUT
8.1 The following diagram shows the physical layout of the RTU control board
X
Y
1750090C 12/16/97 TOP SIDE PARTS PLACEMENT W/ REF. DES.
1750092G LAST ECN 2540
Figure A2 - Control Board top side parts placement with reference deisgnators.
8.2 EXAMPLE: The location of a particular component is given by the following notation - J101 PIN 1 (Y 0.3 - X 1.8).
This means the pin 1 of connector J101 is located at a horizontal (X) coordinate of 1.8 inches and a vertical
(Y) coordinate of 0.3 inches.
8.3 SCHEMATIC REFERENCE NUMBER PARTS LIST, RTU-CNTL, 03/05/98
REF. PART NO. DESCRIPTION Y X
CAPACITORS
C 101 01503021 10uf ELT CAP 50V .1" .2"x.46" r 0.585 3.939
C 102 15111102 .001MF X7R 0805 50V CHIP CAP 1.189 3.291
C 103 152B8106 CAP 10uF 16V 3.4 X 2.8 CHIP TANTALUM 1.113 3.104
C 104 15121104 .1MF X7R 1206 50V CHIP CAP 2.470 3.670
C 105 15110100 10PF NPO 0805 50V CHIP CAP 2.294 4.155
C 106 15110100 10PF NPO 0805 50V CHIP CAP 2.372 4.155
C 107 15121104 .1MF X7R 1206 50V CHIP CAP 1.755 0.428
C 108 15121104 .1MF X7R 1206 50V CHIP CAP 1.849 0.666
C 109 15121104 .1MF X7R 1206 50V CHIP CAP 1.850 0.897
C 110 15121104 .1MF X7R 1206 50V CHIP CAP 1.851 1.130
C 111 15121104 .1MF X7R 1206 50V CHIP CAP 1.234 1.001
C 112 15121104 .1MF X7R 1206 50V CHIP CAP 0.999 1.001
C 113 15110180 18PF NPO 0805 50V CHIP 2.114 1.100
C 114 15110180 18PF NPO 0805 50V CHIP 2.332 1.099
C 115 15111103 .01MF X7R 0805 50V CHIP 1.489 1.719
C 116 15111103 .01MF X7R 0805 50V CHIP 0.935 2.159
C 117 15111103 .01MF X7R 0805 50V CHIP 1.069 2.007
C 118 15111103 .01MF X7R 0805 50V CHIP 0.935 1.810
C 119 15111103 .01MF X7R 0805 50V CHIP 1.069 1.926
C 120 15111103 .01MF X7R 0805 50V CHIP 1.110 1.340
C 121 15111472 .0047MF X7R 0805 50V CHIP 0.964 1.149
C 122 15121104 .1MF X7R 1206 50V CHIP CAP 0.632 1.951
RITRON, INC.
( A-6 )
Page 13

DATAFLOW RTU
REF. PART NO. DESCRIPTION Y X
C 123 152C6226 22uf 10V 6.0 X 3.2 CHIP TANTALUM CAP 0.028 2.955
C 124 152AB334 .33MF 35V "3.2X1.6" CHIP TANTALUM 0.044 3.375
C 125 15121104 .1MF X7R 1206 50V CHIP CAP 1.402 4.111
C 126 01517014 CAPACITOR .047F 5.5V TANTALUM 1.065 4.027
C 127 15121104 .1MF X7R 1206 50V CHIP CAP 2.086 0.369
C 128 15111103 .01MF X7R 0805 50V CHIP 2.442 0.971
C 129 15111103 .01MF X7R 0805 50V CHIP 2.441 1.124
C 130 15111103 .01MF X7R 0805 50V CHIP 2.578 0.971
C 131 15111103 .01MF X7R 0805 50V CHIP 2.579 1.124
C 132 15111102 .001MF X7R 0805 50V CHIP CAP 0.026 3.469
C 133 15121104 .1MF X7R 1206 50V CHIP CAP 1.851 1.255
C 134 15111102 .001MF X7R 0805 50V CHIP CAP 1.241 2.313
C 135 15111102 .001MF X7R 0805 50V CHIP CAP 1.004 2.316
C 136 15111102 .001MF X7R 0805 50V CHIP CAP 0.610 3.791
DIODES
CR101 48A1005C MMBD7000 DUAL DIODE SOT-23 1.080 3.285
CR102 48A1005C MMBD7000 DUAL DIODE SOT-23 1.105 3.664
CR103 48A1005C MMBD7000 DUAL DIODE SOT-23 2.634 3.633
CR104 48A1005C MMBD7000 DUAL DIODE SOT-23 2.306 3.630
CR105 48A1005C MMBD7000 DUAL DIODE SOT-23 1.588 0.388
CR106 48A1005C MMBD7000 DUAL DIODE SOT-23 1.680 0.626
CR107 48A1005C MMBD7000 DUAL DIODE SOT-23 1.680 0.857
CR108 48A1005C MMBD7000 DUAL DIODE SOT-23 1.681 1.090
CR109 48A1005C MMBD7000 DUAL DIODE SOT-23 1.274 0.820
CR110 48A1005C MMBD7000 DUAL DIODE SOT-23 1.039 0.825
CR112 48A100A3 MMBD2835, DUAL DIODE SOT-23 0.170 1.067
CR113 48A100A3 MMBD2835, DUAL DIODE SOT-23 0.171 1.629
CR114 48A1005C MMBD7000 DUAL DIODE SOT-23 0.945 2.496
CR115 04810003 1N4001 DIODE 50 VOLT/1AMP 0.398 4.019
CR116 48B10001 DIODE, ZENER, 6.2V 5% 225MW SOT-23 0.572 3.203
CR117 48B1008W MMBZ 5245 ZENER DIODE SOT23 1.358 2.313
CR118 48B1008W MMBZ 5245 ZENER DIODE SOT23 1.121 2.316
FUSE
F 101 06000040 WIRE; #40AWG TINNED BUS (INCHES) 0.044 3.180
INTEGRATED CIRCUITS
IC101 31040001 IC, SO-16 WIDE VOLT. REG. LT1020 0.789 3.513
IC102 31130002 CD4060 COUNTER, SO-16, CD4060 2.419 3.901
IC105 314B0005 IC, PLCC-52 MICROPROCESSOR, 68HC705B16 2.073 1.926
IC107 31020324 LMT324AD/NJM324E QUAD OP-AMP 1.162 1.595
IC108 312G0001 IC, SO-28 WIDE 32KB STATIC RAM HM52256 1.785 3.803
IC109 311A0001 IC, PLCC-44, PERIPHERAL INTERFACE 82C55A 1.709 3.000
IC110 31110001 RS-485 TRANSCEIVER, SO-8, MAX487 1.109 2.805
IC112 03131056 IC, TO-220 5 PIN VOLT. REG. MIC29302 BOTTOM SIDE
IC113 31120001 INVERTER, HEX CD4069 0.706 2.966
IC114 31010008 LMT2904D DUAL OP AMP SO-8 2.345 0.444
JACKS
J 102 21443061 CONNECTOR; 6 POSITION PC VERT. GOLD
J 103 21443071 CONNECTOR; 6 POSITION PC VERT. GOLD
RELA YS
K 101 04500016 RELAY, SPDT 5V LATCHING 0.161 2.201
K 102 04500016 RELAY, SPDT 5V LATCHING 0.162 2.675
JUMPERS
PJ101 02100024 3 PIN STRAIGHT HEADER 2.810 1.975
PJ102 02100024 3 PIN STRAIGHT HEADER 2.809 1.775
PJ103 02100024 3 PIN STRAIGHT HEADER 2.809 1.575
PJ104 02100098 4 PIN 0.1" HEADER 2.902 1.375
PJ105 02100098 4 PIN 0.1" HEADER 2.709 1.375
PJ106 02100159 2 PIN .1" HEADER STRIP 0.211 2.888
TRANSISTORS
Q 101 4801001Q MMBT-5088 "SOT-23" 1.328 3.754
Q 102 4801001Q MMBT-5088 "SOT-23" 0.171 1.399
Q 103 4801001Q MMBT-5088 "SOT-23" 0.171 1.796
Q 104 4801001Q MMBT-5088 "SOT-23" 0.027 2.752
Q 105 4801001Q MMBT-5088 "SOT-23" 0.170 1.257
Q 106 4801001Q MMBT-5088 "SOT-23" 2.071 0.485
Q 107 4801001Q MMBT-5088 "SOT-23" 2.590 0.409
RESISTORS
R 101 47403163 316K OHM 1% 0805 CHIP 1.264 3.291
R 102 47403012 30.1K OHM 1% 0805 CHIP 1.180 3.399
R 103 47402873 287K OHM 1% 0805 CHIP 1.068 3.439
R 104 47100103 10K OHM 0805 CHIP RES 1.180 3.554
R 105 47100473 47K OHM 0805 CHIP RES. 1.219 3.702
( A-7 )
RITRON, INC.
Page 14

Installation/ Operation
REF. PART NO. DESCRIPTION Y X
R 106 47100102 1K OHM 0805 CHIP RES 1.337 3.914
R 107 47100106 RESISTOR, 10M OHM 0805 5% CHIP 2.473 4.155
R 108 47100474 470K OHM 0805 CHIP RES. 2.625 4.155
R 109 47100103 10K OHM 0805 CHIP RES 1.442 0.348
R 110 47402002 20K OHM 1% 0805 CHIP 1.443 0.428
R 111 47100103 10K OHM 0805 CHIP RES 1.537 0.586
R 112 47402002 20K OHM 1% 0805 CHIP 1.537 0.666
R 113 47100103 10K OHM 0805 CHIP RES 1.537 0.817
R 114 47402002 20K OHM 1% 0805 CHIP 1.537 0.897
R 115 47100103 10K OHM 0805 CHIP RES 1.537 1.050
R 116 47402002 20K OHM 1% 0805 CHIP 1.537 1.130
R 117 47100103 10K OHM 0805 CHIP RES 1.314 0.676
R 118 47402002 20K OHM 1% 0805 CHIP 1.234 0.676
R 119 47100103 10K OHM 0805 CHIP RES 1.079 0.676
R 120 47402002 20K OHM 1% 0805 CHIP 0.999 0.676
R 121 47100106 RESISTOR, 10M OHM 0805 5% CHIP 2.222 1.139
R 122 47401003 100K OHM 1% 0805 CHIP 1.477 1.877
R 123 47403163 316K OHM 1% 0805 CHIP 1.400 1.877
R 124 47100682 6.8K OHM 0805 CHIP RES. 1.391 1.350
R 125 47401003 100K OHM 1% 0805 CHIP 1.250 1.350
R 126 47100332 3.3K OHM 0805 CHIP RES. 1.187 1.234
R 127 47402802 28K OHM 1% 0805 CHIP 1.215 1.879
R 128 47402002 20K OHM 1% 0805 CHIP 1.255 1.986
R 129 47402002 20K OHM 1% 0805 CHIP 1.413 2.115
R 130 47100393 39K OHM 0805 CHIP RES. 1.175 1.985
R 131 47270103 VARIABLE RESISTOR 10K SEALED 2.882 2.265
R 132 47100102 1K OHM 0805 CHIP RES 1.252 2.134
R 133 47100682 6.8K OHM 0805 CHIP RES. 1.094 2.159
R 134 47100393 39K OHM 0805 CHIP RES. 1.410 1.491
R 135 47100332 3.3K OHM 0805 CHIP RES. 1.410 1.640
R 136 47100682 6.8K OHM 0805 CHIP RES. 0.935 1.947
R 137 47100682 6.8K OHM 0805 CHIP RES. 1.070 1.850
R 138 47100393 39K OHM 0805 CHIP RES. 0.935 1.510
R 139 47403012 30.1K OHM 1% 0805 CHIP 0.935 1.662
R 140 47403012 30.1K OHM 1% 0805 CHIP 1.002 1.354
R 141 47402002 20K OHM 1% 0805 CHIP 1.002 1.250
R 142 47100752 RESISTOR, 7.5K OHM 0805 CHIP 0.543 1.333
R 143 47100243 24K OHM 0805 CHIP RESISTOR 0.543 1.508
R 144 47401003 100K OHM 1% 0805 CHIP 0.835 1.990
R 145 47402002 20K OHM 1% 0805 CHIP 0.543 1.588
R 146 47100103 10K OHM 0805 CHIP RES 0.835 2.294
R 147 47100103 10K OHM 0805 CHIP RES 0.835 2.154
R 148 47402802 28K OHM 1% 0805 CHIP 0.346 3.455
R 149 47404751 4.75K OHM 1% 0805 CHIP 0.463 3.368
R 150 47401003 100K OHM 1% 0805 CHIP 1.248 2.540
R 151 47401003 100K OHM 1% 0805 CHIP 0.931 2.758
R 152 47100103 10K OHM 0805 CHIP RES 0.835 2.433
R 153 47100270 27 OHM 0805 CHIP RESISTOR 1.084 2.540
R 154 47100270 27 OHM 0805 CHIP RESISTOR 1.172 2.540
R 155 47100102 1K OHM 0805 CHIP RES 1.366 4.028
R 156 47100123 12K OHM 0805 CHIP RES. 1.373 1.249
R 157 47404990 RESISTOR, 499 OHM 1% 0805 CHIP 2.035 0.611
R 158 47404990 RESISTOR, 499 OHM 1% 0805 CHIP 2.636 0.695
R 159 47100334 330K OHM 0805 CHIP RES. 2.442 1.048
R 160 47100334 330K OHM 0805 CHIP RES. 2.485 1.310
R 161 47100334 330K OHM 0805 CHIP RES. 2.579 1.048
R 162 47100334 330K OHM 0805 CHIP RES. 2.608 1.253
R 163 47100103 10K OHM 0805 CHIP RES 1.180 3.477
R 164 47100102 1K OHM 0805 CHIP RES 2.035 0.852
R 165 47404990 RESISTOR, 499 OHM 1% 0805 CHIP 2.035 0.689
R 166 47100102 1K OHM 0805 CHIP RES 2.737 0.971
R 167 47404990 RESISTOR, 499 OHM 1% 0805 CHIP 2.636 0.617
R 168 47100106 RESISTOR, 10M OHM 0805 5% CHIP 2.549 4.155
R 169 47100102 1K OHM 0805 CHIP RES 1.775 0.339
R 170 47100102 1K OHM 0805 CHIP RES 1.868 0.578
R 171 47100102 1K OHM 0805 CHIP RES 1.868 0.807
R 172 47100102 1K OHM 0805 CHIP RES 1.869 1.040
R 173 47100102 1K OHM 0805 CHIP RES 1.321 1.020
R 174 47100102 1K OHM 0805 CHIP RES 1.085 1.019
R 175 47100682 6.8K OHM 0805 CHIP RES 1.492 2.036
R 176 47403012 30.1K OHM 1% 0805 CHIP RES
CRYST ALS
Y 101 02300041 32.768 KHz CRYSTAL 2.372 4.344
Y 102 02300058 CRYSTAL 4.000MHZ; AT-49 2.195 1.294
RITRON, INC.
( A-8 )
Page 15
9. RF BOARD SCHEMATIC
9.1 Contact Omega for more detailed information on the DTX RF board schematic.
DATAFLOW RTU
10.
RF BOARD LAYOUT
10.1 Contact Omega for more detailed information on the DTX RF board layout.
11. INTERCONNECTS
C A U T I O N
On DATAFLOW RTUs shipped before the 2nd quarter of 1998, do not exceed 6 volts
referenced to GNDon RS-485 connections (the GREEN and BLUE wires of the External
Power/Serial Cable: OMEGA Part No. 06001123). Exceeding 6 volts will damage
protection circuitry and render the units serial link inoperable.
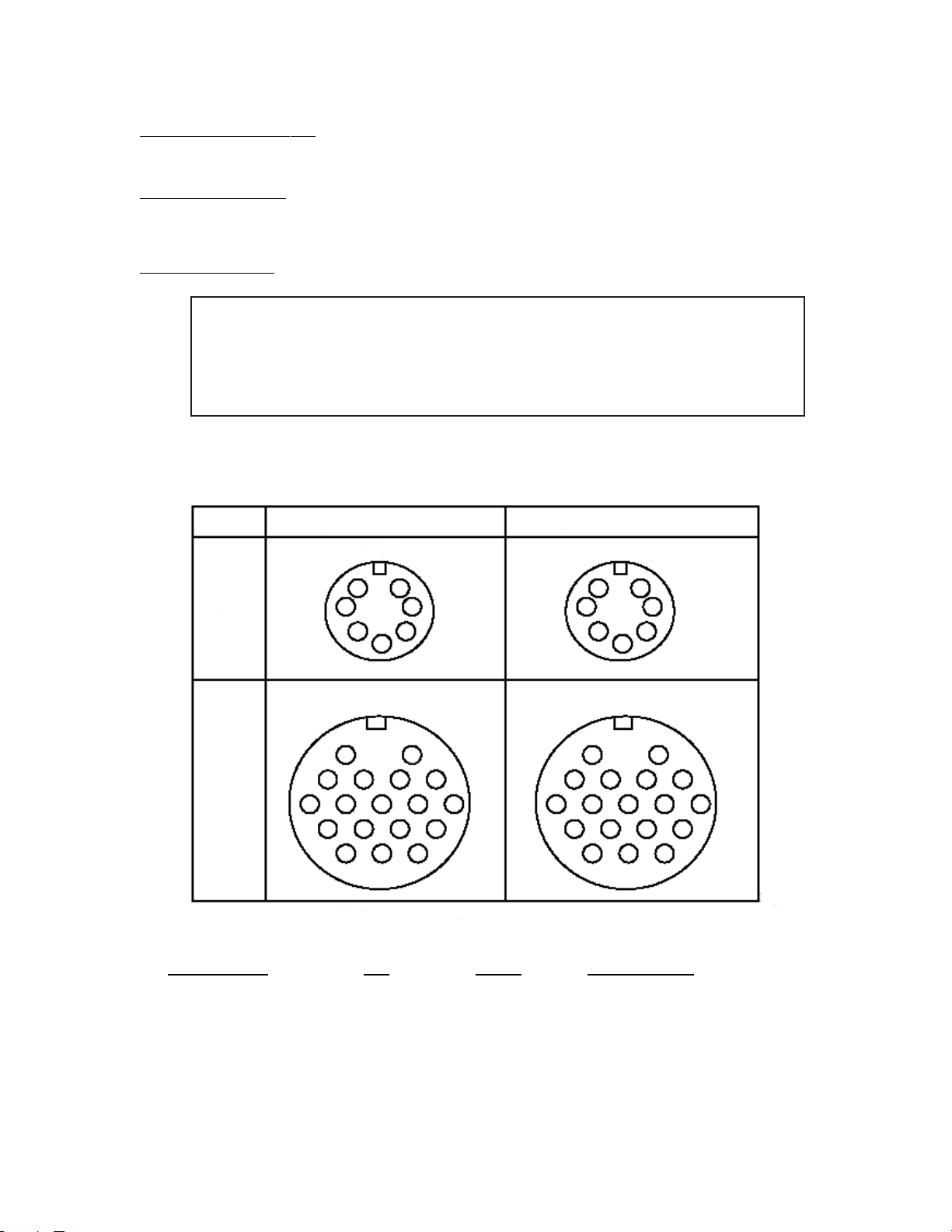
11.1 For a weather-resistant aluminum enclosure for DATAFLOW RTU, purchase it in a small (S) enclosure
option. This option also provides bulkhead circular connectors and one UHF antenna port. See Figure A3
for pin number designations of the circular connectors.
BULKHEAD CONNECTOR CABLE CONNECTOR
KEYING SLOT
1
7
6
55
2
3
4
7-PIN
KEYING PIN
1
7
2
3
6
4
3
18-PIN
7
12
Figure A3 - Circular connector pin designators
11.1.1 BULKHEAD CONNECTORS:
CONNECTOR PIN NAME DESCRIPTION
Ext. Power/ Serial: 1 A Serial Pair A
KEYING PIN
1
4
8
16 17
2
6
5
9
14
11
15
18
KEYING SLOT
2
6
11
10
15
18
14
1
3
4
5
8
910
1313
7
12
1617
2 B Serial Pair B
3 GND Loader Ground
4 LDR Loader Connected/Program Enable
5 GND Power Ground
6 VI Power In to Controller and Radio
7 B+ From Internal Battery
( A-9 )
Page 16
Installation/Operation
CONNECTOR PIN NAME DESCRIPTION
User Input/ Output: 1 R11 Relay 1 Contact 1
2 R12 Relay 1 Contact 2
3 R21 Relay 2 Contact 1
4 R22 Relay 2 Contact 2
5 PWR Power Out
6 GND Power Out Ground
7 S1 Input 1
8 GND Input 1 Ground
9 S2 Input 2
10 GND Input 2 Ground
11 S3 Input 3
12 GND Input 3 Ground
13 S4 Input 4
14 GND Input 4 Ground
15 S5 Input 5/ Output 1
16 GND Input 5/ Output 1 Ground
17 S6 Input 6/ Output 2
18 GND Input 6/ Output 2 Ground
11.1.2 OPTIONAL INTERFACE CABLES, part numbers RTU-06001123 and RTU-06001124, may be purchased
for use with the small (S) enclosure. These cables provide the user with 6-foot long, color-coded cables
designed specifically for use with DATAFLOW RTU.
11.1.3 INTERFACE CABLE CONNECTIONS:
CABLE PIN NAME COLOR CODE DESCRIPTION
Ext. Pwr./ Serial: 1 A GREEN Serial Pair A
Part # 06001123 2 B BLUE Serial Pair B
3 GND BLACK Loader Ground
4 LDR WHITE Loader Connected/Program Enable
5 GND BROWN Power Ground
6 VI RED Power In to Controller and Radio
7 B+ ORANGE From Internal Battery
User Input/ Output: 1 R11 WHITE Relay 1 Contact 1
Part # 06001124 2 R12 RED Relay 1 Contact 2
3 R21 GREEN Relay 2 Contact 1
4 R22 RED Relay 2 Contact 2
5 PWR RED Power Out
6 GND BLACK Power Out Ground
7 S1 BROWN Input 1
8 GND BLACK Input 1 Ground
9 S2 ORANGE Input 2
10 GND BLACK Input 2 Ground
11 S3 YELLOW Input 3
12 GND BLACK Input 3 Ground
13 S4 GREEN Input 4
14 GND BLACK Input 4 Ground
15 S5 BLUE Input 5/ Output 1
16 GND BLACK Input 5/ Output 1 Ground
17 S6 WHITE Input 6/ Output 2
18 GND BLACK Input 6/ Output 2 Ground
NOTE: The following pin groups are twisted pairs:
1-2, 3-4, 5-6, 7-8, 9-10, 11-12, 13-14, 15-16, 17-18
( A-10( A-3 ) )
Page 17
11.1.4 CONNECTIONS
CONNECTOR PIN NAME DESCRIPTION
Ext. Power/ Serial: 1 A Serial Pair A
J105 (X3.8 Y0.2) 2 B Serial Pair B
User Input/ Output: 1 R11 Relay 1 Contact 1
J101 (X1.8 Y0.3) 2 R21 Relay 2 Contact 1
DATAFLOW RTU
3 GND Loader Ground
4 LDR Loader Connected/ Program Enable
5 GND Power Ground
6 VI Power In to Controller and Radio
7 B+ From Internal Battery
3 R12 Relay 1 Contact 2
4 R22 Relay 2 Contact 2
5 PWR Power Out
6 GND Power Out Ground
7 S1 Input 1
8 GND Input 1 Ground
9 S2 Input 2
10 GND Input 2 Ground
11 S3 Input 3
12 GND Input 3 Ground
13 S4 Input 4
14 GND Input 4 Ground
15 S5 Input 5/ Output 1
16 GND Input 5/ Output 1 Ground
17 S6 Input 6/ Output 2
18 GND Input 6/ Output 2 Ground
12. HARDWARE CONFIGURATION
12.1 The DATAFLOW RTU has six hardware configurable jumpers. Jumper functions are described in the
following paragraphs 12.1.1 to 12.1.6. See Figure A2, page A-6, for location references.
12.1.1 PJ101 (Y 2.8 - X 2.0): This jumper setting determines whether configurable I/O 1 is an input or an analog
output. The jumper across pins 1 and 2 configures the pin to be an input. The jumper across pins 2 and 3
configures the pin to be an output, the default setting.
12.1.2 PJ102 (Y 2.8 - X 1.8): This jumper setting determines if configurable I/O 2 is an input or an analog
output. The jumper across pins 1 and 2 configures the pin to be an input. The jumper across pins 2 and 3
configures the pin to be an output, the default setting.
12.1.3 PJ103 (Y 2.8 - X 1.6): This jumper setting determines how the configurable analog outputs 1 and 2 are
powered. The jumper setting is valid only if PJ101 or PJ102 is set for output. The jumper across pins 2
and 3 configures the output to be powered by system power. The jumper across pins 1 and 2 configures
the output to be powered by regulated radio power, the default setting.
PJ104 (Y 2.9 - X 1.2): This jumper setting determines if configurable I/O 1 is set for voltage or current loop
analog output. This jumper setting is valid only if PJ101 is set for output. With one jumper across pins 1
and 2 and another jumper across pins 3 and 4, the output is configured for voltage, the default setting.
Only one jumper across pins 2 and 3 configures the output for current loop.
( A-11 )
Page 18
Installation/Operation
12.1.5 PJ105 (Y 2.7 - X 1.2): This jumper setting determines if configurable I/O 2 is set for voltage or current
loop analog output. This jumper setting is valid only if PJ102 is set for output. With one jumper across
pins 1 and 2 and another jumper across pins 3 and 4, the output is configured for voltage, the default
setting. Only one jumper across pins 2 and 3 configures the output for current loop.
12.1.6
PJ106 (Y 0.2 - X 2.9): This jumper connects the internal battery power to the power input of the control
board. This jumper setting is valid only when using the internal battery power. With the jumper installed,
the default condition, the internal battery is always connected to control board power, meaning the unit is
always ON with the internal batteries installed.
13. SOFTWARE CONFIGURATION
13.1 All DATAFLOW RTUs contain identical hardware; the software configuration of a unit makes it perform a
particular task. This programmable configuration can be changed using any PC compatible computer,
DATAFLOW RTU Programming Software and a DATAFLOW RTU Programming Cable.
14. MOUNTING INFORMATION
14.1 To provide DATAFLOW RTU with an aluminum enclosure, it may be purchased with the small enclosure
(S). The S enclosure has four pilot holes drilled into the back corners of the case; the holes are tapped
with four (4) #6 - 32 x 3/8 thread-forming screws. The DATAFLOW RTU is shipped with these screws
installed in the case. A T-15 Torx© drive tool is required to remove the screws.
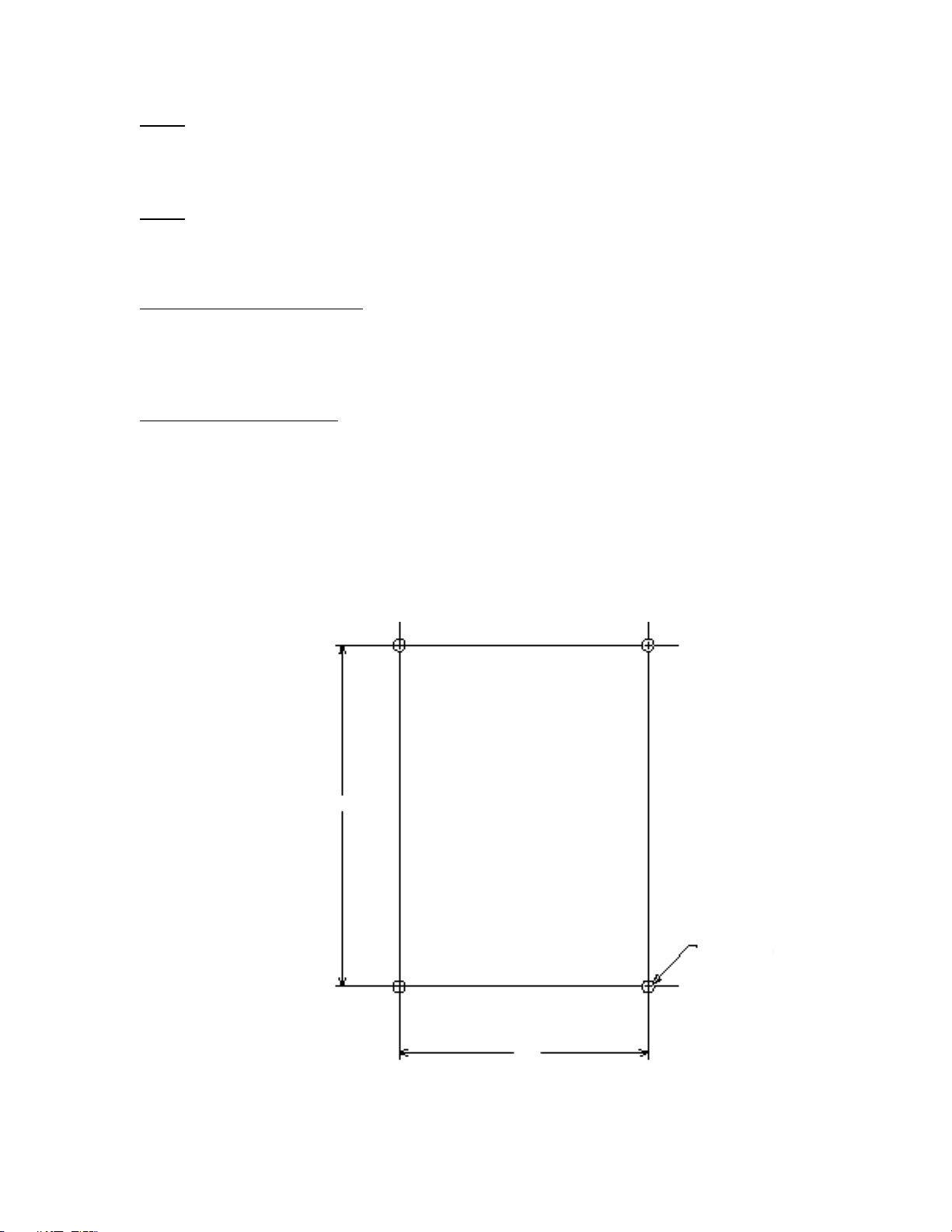
14.1.1 You can use the holes in the back of the enclosure to mount the DATAFLOW RTU directly to a surface,
using the recommended hole pattern shown in Figure A4. The four thread-forming screws can be used to
secure the case to the surface, if desired, by removing the screws and reusing them. Alternately, four #6 32 machine screws may be used; ensure they do not extend more than 5/16" into the case.
4.050
.144 DIA. MIN. 4-PLACES
(CLEARANCE FOR #6-32 SCREW)
3.050
Figure A4 - Mounting hole pattern for fastening directly to the DATAFLOW RTU case
( A-12 )
Page 19
DATAFLOW RTU
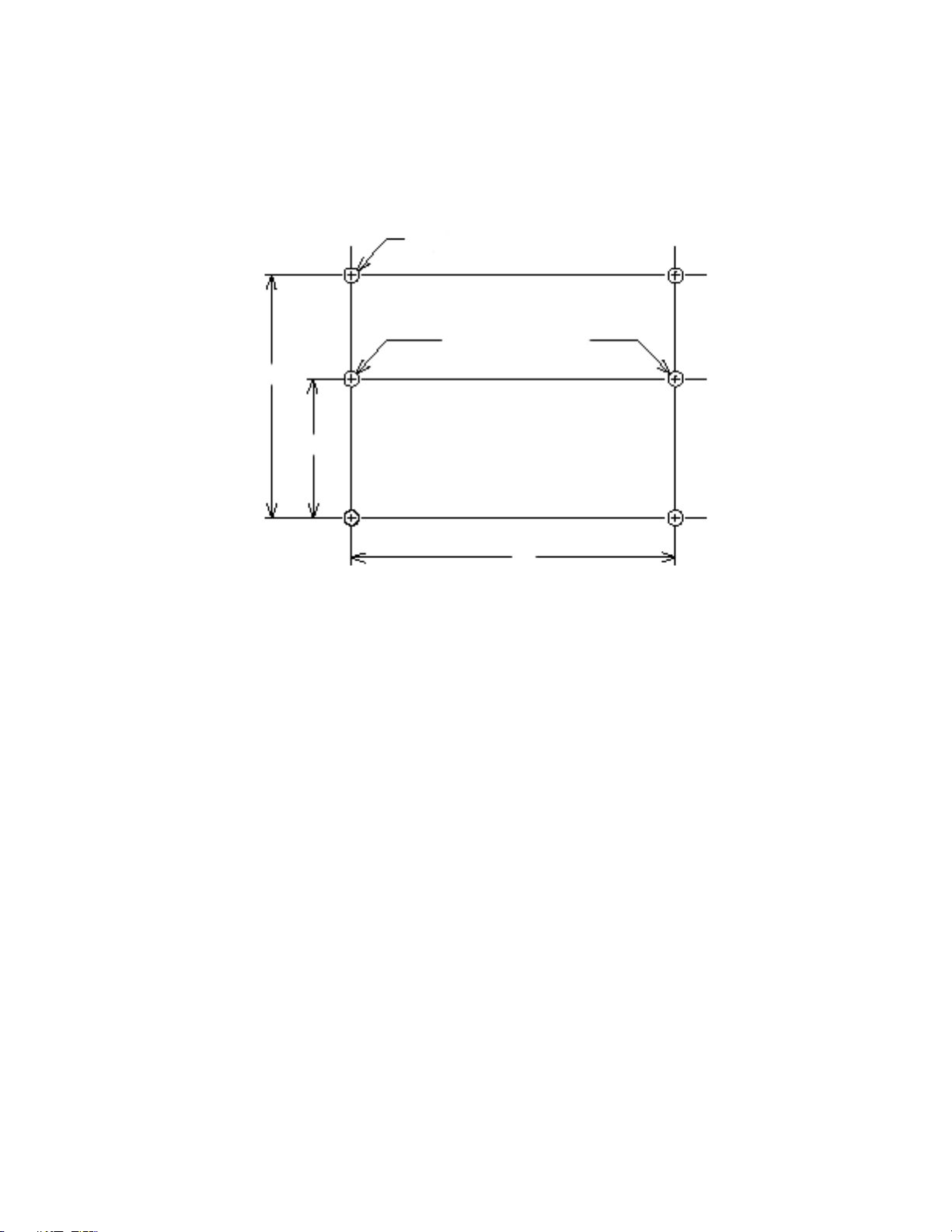
14.1.2 Optional mounting bracket OMEGA part number RTU-25104600 is available for DATAFLOW RTU. To
install this bracket to the case, remove and save the four thread-forming screws described in paragraph
14.1 to attach the mounting bracket to the case. Be sure the narrow portion of the keyhole is positioned
towards the top (UHF antenna connector) of the DATAFLOW RTU. Use the recommended hole pattern
for the optional mounting bracket shown in Figure A5.
.201 DIA. MIN. TYP
(CLEARANCE FOR #10-32 SCREW)
OPTIONAL MOUNTING - 2-PLACES
3.250
1.882
4.437
Figure A5 - Mounting hole pattern for use with optional mounting bracket
14.2 Reassembling DATAFLOW RTU Cover/ Waterproofing the Antenna Connection
14.2.1 The DATAFLOW RTU is weather-resistant if it has been properly sealed. If you have opened or
disassembled the device, refer to the following instructions.
14.2.2 Sealing the Housing Cover: Inspect the seal and mating surfaces for flaws (tears, gaps, dents, etc.).
Repair the surface or replace the part as necessary. Purchase replacement cover gaskets through Omega: Part
No. RTU-25605100.
Insert the seal in the cover. Thread the four (4) screws through the cover, into the housing; do not tighten the
screws. Snug down the screws in an X sequence; i.e.: top left, then bottom right, then top right, then bottom
left. Then fully tighten the screws in this same sequence.
14.2.3 Replacing Connectors: OMEGA discourages the practice of removing and discarding the protective cap
from the connectors. Doing this may reduce the water-resistance of the unit. If you must remove a connector for
any reason, make sure it has been retightened properly finger-tight connector nuts will not provide an
effective water barrier.
14.2.4 Connecting the Antenna: Seal screws are used to secure the antenna to the housing. Always replace
with a new seal screw, not a common screw.
Do not remove the antenna connector from the housing; doing so will destroy the silicone rubber seal in the
interface. The screw securing the ground strap inside the housing must be fully tight.
14.2.5 If this device is to be used in a wet environment, use seal tape around the antenna connection. Use
Archer Connector Sealant, Radio Shack Number 278-1645 or an equivalent. Wrap the connection with the
sealant tape and press it securely in place.
( A-13 )
Page 20

Installation/Operation
15. POWER
15.1 The DATAFLOW RTU small enclosure (S) may be purchased with the delete internal power (D) option.
The RTU power source is a user-provided external power supply meeting the following criteria:
· Between 10 VDC and 16 VDC with 12 VDC nominal;
· Has less than 1 V peak-to-peak of ripple;
· Provides 1.5 A with the transmitter in low power setting;
· Provides 2.5 A with the transmitter in high power setting.
15.1.1 Connect the positive side of the power supply to J105 pin 6. Connect the negative side of the power
supply to J105 pin. The negative side of the power supply is considered to be GROUND and is the
REFERENCE to which all inputs, outputs and measurements are to be made. GROUND is connected to
the enclosure.
15.2 You can purchase the DATAFLOW RTU with an eight-cell internal battery holder (power option 1). In this
option, internal AA batteries are used as the power source.
CAUTION: When installing the batteries, be sure to match polarities of the batteries with the
battery holder. Not matching polarities can damage the RTU.
15.2.1 The negative side of the battery assembly is considered to be GROUND and is the REFERENCE by
which all inputs, outputs, and measurements are to be made. GROUND is connected to the case.
15.2.2 The battery voltage appears at pin 8 of J105 pin 8, and is not connected directly to the input power of the
RTU control board. With jumper PJ106 installed, the battery is jumpered to the input power. With jumper
PJ106 not installed, an external connection is required between pin 6 and 7, which allows the user to
install an external ON/OFF switch to the RTU while using internal power.
15.3 J101 pin 5 is connected to the RTU power source, and J101 pin 6 is connected to GROUND. This power
supply provides excitation voltage to external equipment with maximum current draw of .25 A.
15.4 Fuse F101 (X3.2 - Y0.1) is a 40-gauge tinned wire designed to open at 2.5A. If this fuse is destroyed,
replace it with nothing larger than 40-gauge wire.
15.5 Optional Internal Battery Back-up (Refer to 11.1.3 for the appropriate pin numbers.)
Either of the following two options may be used as an optional internal battery back-up:
a. A two 4-cell battery pack (OMEGA Part No. RTU-BATNICD),
b. An 8-cell AA battery holder (OMEGA Part No. RTU-BAT/HOLD).
OR
15.5.1 Connect the battery as shown in Figure A6:
CR1
NOTE: CR1and CR2
are to be 1N5817
CR2
V source
G N D
R1
Figure A6 - Battery Connection Wiring Diagram
15.5.2 The following equations define the values required for R1.
R1 = (Vsource - Vdiode - Vbattfull) / Icharge
PR1 = (Vsource - Vdiode - Vbattempty)2 / R1
WHERE: R1 is the value of R1 in Ohms
Vsource is the input voltage to the RTU.
Vdiode is the voltage drop of the diode (CR1).
Vbatfull is the fully charged voltage of the internal battery.
Icharge is the charge current to the battery.
PR1 is the power rating of R1 in Watts.
Vbattempty is the empty voltage of the internal battery.
( A-14 )
RTU 7-PIN
CONNECTOR
7 ORN
6 RED
5 BRN
B +
V 1
G N D
Page 21

DATAFLOW RTU
15.5.3 The following calculations apply to RTU-BATNICD, using a 14V source.
R1 = (14 - 0.4 - 12) / .05 = 32 W
PR1 = (14 - 0.4 - 8)2 / R1 = 0.98 W
15.5.4 For RTU-BATHOLD, use a rechargeable battery type. Confirm the manufacturers specification for full
charge voltage, empty voltage, and trickle charge current.
16.
16.1 J105 pins 1 and 2 comprises the pair of differential lines used for the RS-485 link. This link provides the
17. I/O MAPPING
17.1 I/O mapping is the connection of one DATAFLOW RTU input to (another) DATAFLOW RTU input via
17.2 A digital output used as a warning indicator is not available for mapping to an input of another unit.
17.3 Using the analog output as a warning indicator is not recommended. If used in this way, it is not available
18. DIGITAL INPUTS
18.1 The (up to) six digital inputs are pins 7, 9, 11, 13, 15 and 17 of J101. (NOTE: Pins 15 and 17 are inputs
SERIAL LINK
user access to change the software configuration, and allows the RTU to be controlled by an external
computer via MODBUS RTU Protocol. The baud rate of this link is programmable between 1200, 2400,
4800, and 9600 BPS.
radio communication. The current mapping scheme allows any input of any DATAFLOW RTU to be sent
to any output of any other DATAFLOW RTU.
Because of this, a DATAFLOW RTU having a digital output used as a warning indicator can have only
one digital signal sent to it.
to be mapped to an input of another unit, meaning a DATAFLOW RTU having an analog output used in
this manner can have only one analog signal sent to it. NOTE: Be sure to not exceed the load drive
capability if an analog output is used as a warning indicator.
only if jumpers PJ101 and PJ102 are configured as inputs.)
Inputs are to be considered either HIGH or LOW. The following table defines the characteristics of the
input pin. The absolute limits are the safe operating region. Operation outside of this region can damage
the device. A HIGH state may be obtained by letting the input pin float, and a LOW state may be obtained
by connecting the input pin to GROUND. The threshold level between HIGH and LOW is programmed
with DATAFLOW RTU Programming Software.
PARAMETER MINIMUM MAXIMUM
HIGH programmable V 5 V
programmable kΩ infinite Ω
LOW 0 V programmable V
0 Ω programmable kΩ
ABSOLUTE LIMITS -2 V 7 V
You can invert the input state of an RTU unit, which will cause a DATAFLOW RTU reading a switch as
HIGH to transmit the switch status as LOW to another DATAFLOW RTU. Inversion allows a NORMALLY
OPEN switch to control a NORMALLY CLOSED relay output without external circuitry.
( A-15 )
Page 22

Installation/Operation
19. DIGITAL OUTPUTS
19.1 The two digital outputs are defined to be pins 1-3 and 2-4. These outputs are two dry-contact closurelatching relays. They are controlled by the DATAFLOW RTU software, and are either OPEN or CLOSED.
The following table defines the characteristics of the relay. The UL/ CSA power rating is the safe
operating region. Operation outside of this region can damage the device.
PARAMETER MINIMUM MAXIMUM
OPEN 1 MΩ
CLOSED 1 Ω
UL/ CSA POWER RATING 2A 30VDC
.5A 110VDC
.5A 125VAC
19.1.1 The relays can be programmed to have both initial and fail-safe conditions. The initial condition forces the
relays to a desired state at power on of the device. The fail-safe condition forces the relays to a desired
state if a RF data link problem is detected. For details on how to set these conditions, see the
DATAFLOW RTU Software/Programmers Manual.
19.2 If a digital output is used for a warning indicator, it is not available to be mapped to the corresponding
digital input of the other unit. This means that if a digital output is used for a warning indicator, only one
digital signal may be sent to that DATAFLOW RTU.
19.3 Because the relays are latching relays, they retain the state they are in if power to the DATAFLOW RTU
is lost; they will not go to OPEN state during power outage.
20.
20.1 The (up to) six analog inputs are defined as pins 7, 8, 11, 13, 15 and 17. (NOTE: Pins 15 and 17 are
20.1.2 If the signal to be transmitted is a 0 - 20mA current source, the input pin must have a 250W resistor
ANALOG INPUTS
inputs only if PJ101 and PJ102 are configured as inputs.)
These inputs can be of two types: voltage or current loop. These inputs are used to digitize the analog
signal and transmit it to another DATAFLOW RTU.
20.1.1 If the signal to be read is a voltage source, the input pin is ready as is. The following table defines
the characteristics of the input pin working as voltage input. Absolute limits define the safe operating
region; operating outside this region can damage the device.
PARAMETER MINIMUM MAXIMUM
INPUT RANGE 0 V 5 V
SOURCE IMPEDANCE 1000 Ω
ABSOLUTE LIMITS -2 V 7 V
placed between the pin and GROUND. The following table defines the characteristics of the input pin
working as a current input. Absolute limits define the safe operating region. Operating outside this region
can damage the device.
See Figure A7, below, for an example of connecting a current loop sensor to the DATAFLOW RTU.
PARAMETER MINIMUM MAXIMUM
INPUT RANGE 0 mA 20 mA
SOURCE IMPEDANCE (Ev-5) / .02 Ω
ABSOLUTE LIMITS -8 mA 28 mA
NOTE: Ev is excitation voltage
( A-16 )
Page 23

DATAFLOW RTU
POWER OUT
ANALOG IN
ANALOG IN GND
RESISTOR
SENSOR
RESISTOR
DATAFLOW RTU
POWER OUT
ANALOG IN
ANALOG IN GND
SENSOR
V
EXCITATION
VOLTAGE
USING DATAFLOW RTU
AS THE EXCITATION VOLTAGE
Ω
250
USING AN EXTERNAL SOURCE
AS THE EXCITATION VOLTAGE
Ω
250
DATAFLOW RTU
Figure A7 - Connecting a Current loop sensor to a DATAFLOW RTU analog input.
20.2 All analog inputs are non-isolated. All analog measurements are referenced to GROUND. Take care
when connecting the DATAFLOW RTU to external sensors.
20.3 The user can invert the input state of a DATAFLOW RTU if desired, which will cause a DATAFLOW RTU
that reads an analog signal as full scale to transmit the signal status as zero scale to another
DATAFLOW RTU. This inversion allows a positive transfer function signal to control a negative transfer
function signal without external circuitry.
20.4 Sensor excitation voltage may be supplied by the DATAFLOW RTU, using the J101 Power Out pin. For
this configuration, make sure to not exceed the maximum current drive of the pin, and ascertain your
sensor will operate on a supply voltage of Vsupply-5Volts.
21. ANALOG OUTPUTS
21.1 The two analog outputs are defined to be pins 15 and 17. (NOTE: Pins 15 and 17 are outputs only if
PJ101 and PJ102 are configured as outputs.)
These outputs are two low power outputs hardware configured as either a voltage source or a current
sink. All analog outputs are referenced to GROUND.
21.1.1 If the output pin is desired to be a voltage source, correctly set the hardware configuration. The pin is to
be hardware-configured as an output and as a voltage source. The following table defines the
characteristics of the output pin set as a voltage source. Attempting to drive a load less than the minimum
will cause incorrect output and can possibly damage the device.
PARAMETER MINIMUM MAXIMUM
OUTPUT RANGE 0 V 5 V
LOAD RESISTANCE 1000 Ω
( A-17 )
Page 24

Installation/Operation
D
U
POWER O U T
ANALOG OUT
ANALOG OUT GND
IND IC ATOR
D
U
POWER O U T
ANALOG OUT
ANALOG OUT GND
V
21.1.2 If the output pin is to be a current sink, correctly set the hardware configuration. The pin is to be
hardware configured as an output and as a current source. The following table defines the characteristics
of the output pins set as a current sink. Attempting to drive a load less than the minimum will cause
incorrect output and possibly can damage the device.
See Figure A8, below, for an example of how to connect a current loop meter to the DATAFLOW RTU.
PARAMETER MINIMUM MAXIMUM
OUTPUT RANGE 0 mA 20 mA
LOAD RESISTANCE (Ev-5.5)/.02 Ω
NOTE: Ev is excitation voltage
USING DATAFLOW RTU
AS THE EXCITATION VO LTA G E
ATAFLOW RT
USING AN EXTERNAL SOURCE
AS THE EXCITATION VO LTA G E
ATAFLOW RT
INDICATOR
EXCITATION
VOLTAGE
Figure A8. - Connecting a Current loop indicator to a DATAFLOW RTU analog output
21.2 The analog outputs can be programmed to have both initial and fail-safe conditions. The initial condition
forces the output to a desired state at power ON of the device. The fail-safe condition forces the output to
a desired state if an RF data link problem is detected. Refer to DATAFLOW RTU Software/Programmers
Manual for details on setting these conditions.
21.3 Meter excitation voltage may be provided by the DATAFLOW RTU using the Power Out pin of connector
J101. If the Power Out pin is used as the excitation supply make sure that the maximum current drive of
the pin is not exceeded and that your indicator will operate on a supply voltage of Vsupply-5.5Volts.
21.4 It is not recommended to use the analog output as a warning indicator. If used, it is not available to be
mapped to the corresponding analog input of the other unit; meaning that a DATAFLOW RTU having an
analog output used in this manner can have only one analog signal sent to it. NOTE: Be sure to not
exceed the load drive capability if an analog output is used for a warning indicator.
( A-18 )
Page 25

Software/Programming DATAFLOW RTU
Software/ Programming Table of Contents
SECTION TITLE PAGE NO.
1 Introduction B-1
2 Operation B-1
3 Microprocessor Updates B-1
4 Programming Kit B-1
5 Programming Software B-3
6 MODBUS Memory Map B-11
7 Technical Notes B-13
8 Application Examples B-15
Software/ Programming Table of Figures
TITLE PAGE NO.
B1 - Configuration Screen B-13
B2 - Example 1 RTU ID 1 Wiring Diagram B-26
B3 - Example 1 RTU ID 2 Wiring Diagram B-27
B4 - Example 2 RTU ID 1 Wiring Diagram B-28
B5 - Example 2 RTU ID 2 Wiring Diagram B-29
B6 - Example 2 RTU ID 3 Wiring Diagram B-30
B7 - Example 4 RTU ID 1 Wiring Diagram B-31
B8 - Example 4 RTU ID 2 Wiring Diagram B-32
B9 - Example 5 RTU ID 1 Wiring Diagram B-33
B10 - Example 5 RTU ID 2 Wiring Diagram B-34
B11 - Example 5 RTU ID 3 Wiring Diagram B-35
B12 - Example 6 RTU ID 1 Wiring Diagram B-36
B13 - Example 6 RTU ID 1 Wiring Diagram B-37
( B-i )
Page 26
1. INTRODUCTION
DATAFLOW RTU
1.1 The DATAFLOW RTU from OMEGA is a complete wireless telemetry system designed to
deliver industrial instrumentation signals from a source to other instruments via radio frequency
communications. The DATAFLOW RTU allows you to access industrial measuring devices in
remote locations without running wires, installing microwave links or leasing a telephone line.
OMEGA DATAFLOW RTU and MODBUS radio communications equipment replaces these
methods.
1.2 Manual Part B is intended to provide information needed for the programming and MODBUS
control of OMEGA DATAFLOW® RTU systems. The intended readers are people familiar with
industrial instrumentation. A basic understanding of radio communi-cations is helpful. The
included information is valid only for models listed on the cover.
2.
2.1 DATAFLOW RTU is a radio telemetry system that operates on either UHF-FM (450-470 MHz
2.2 All DATAFLOW RTU systems require FCC licensing.
3.
3.1 A microprocessor, the main controlling device of a DATAFLOW RTU, is located in a socket on
3.2 The microprocessor firmware version available when this manual was printed is Version 3.27.
3.3 Custom software is also available. Call OMEGA for help in determining if custom software is
OPERATION
with transmitter power of 2 Watts or 5 Watts); or VHF-FM (150 - 165 MHz, 136 - 151 MHz,
160 - 174 MHz with transmitter power of 5 Watts). An RTU system operating in the UHF-FM
band at 2 Watts with directional antennas and 50-foot towers has an effective range of 20 to 25
miles over level terrain. Changes in the frequency of operation, transmitter power, terrain and
antenna structure will affect the range of the link.
MICROPROCESSOR UPDATES
the Control Board. Socket configuration provides ease in replacing or updating microprocessor
firmware.
(In Version 3.x, x represents the [number] designation of a minor revision.) OMEGA Users
Guide for DATAFLOW RTU is written for all 3.2 minor designation number DATAFLOW RTU
microprocessors.
cost-effective for you.
4.
4.1 A programming kit for user configuration, OMEGA part number RTU-PCPK, is available on
4.2 The programming kit RTU-PCPK, consists of:
PROGRAMMING KIT
separate purchase. It is for connecting and providing power to the DATAFLOW RTU, and for
connecting a MODBUS PC controller to the DATAFLOW RTU.
· (1) AC Power Supply, OMEGA part number RTU-PS
· (1) Computer Cable, OMEGA part number RTU-9/RTC-PAS
· (1) DATAFLOW RTU Cable, OMEGA part number RTU-PCPC
· (1) RTU Programming Software Disk, OMEGA part number RTU-PCPS-3.05
NOTE: You can download the RTU-PCPS-3.05 software from the OMEGA website at
<www.dasieee.com/>
( B-1 )
Page 27
Software/Programming
4.2.1 The AC Power Supply, OMEGA part number RTU-PS, converts 110 Volts AC to a DC voltage
for use by the DATAFLOW RTU. The power supply provides power to the RTU when RTU
programming software is being used, and also provides power to the RTU, if it is to be
connected to a MODBUS PC controller.
CAUTION:
Plug the power supply only into a 110 VAC outlet. AC Power Supply, OMEGA
part number RTU-PS is intended only for indoor use at normal room temperatures.
It is not intended to provide protection from water or any other contaminants; it is
not intended to function over the full temperature range of the DATAFLOW RTU.
To correctly use the power supply, plug the two-pronged end into a 110 VAC
50-60 Hz wall outlet. Plug the 2.1 mm power jack into the 2.1 mm power receptacle
of the RTU-PCPC cable.
NOTE: The AC Power Supply furnished with the programming kit is not guaranteed to provide
adequate current to the RTU in HIGH (5W) power mode. When the transceiver is operating in
the HIGH power mode, DC power supply of 12 Volts and 2.5 Amps minimum is required. For
external power supply connection, mate the coaxial power connector of the RTU-PCPC cable
to a coaxial power connector, Radio Shack part number 274-1569 or equivalent, having an
outer diameter of 5.5 mm and an inner diameter of 2.1 mm.
4.2.2 The Computer Cable, OMEGA part number RTU- 9/RTC-PAS, connects the 25-pin PC compatible
COM port to the RTU-PCPC cable. Plug the 25-pin connector into the computer port and the
modular telephone jack into the RTU-PCPC.
CAUTION:
Computer Cable, OMEGA part number RTU-9/RTC-PAS is intended to operate at normal room
temperatures; it is not intended to function over the full temperature range of the DATAFLOW RTU.
NOTE: If the COM port has a 9-pin connector, a 9-pin to 25-pin serial port adapter is required.
The adapter is not included with the programming kit.
4.2.3 DATAFLOW RTU Cable, OMEGA part number RTU-PCPC is used to connect the RTU to the
power supply and the computer cable. Plug the 7-pin circular connector of the RTU-PCPC into
the 7-pin connector of the RTU.
CAUTION:
DATAFLOW RTU Cable, OMEGA part number RTU-PCPC is intended to operate at normal room
temperatures, it is not intended to function over the full temperature range of the DATAFLOW RTU.
( B-2 )
Page 28
DATAFLOW RTU
4.2.4 RTU Programming Software Disk, OMEGA part number RTU-PCPS-3.0, provided with the
programming kit to facilitate configuration of a DATAFLOW RTU is version 3.0. To install it on
the computer hard drive, insert the 3.5" diskette into the floppy drive, select that drive and type
INSTALL.EXE. Follow the instructions on the computer monitor screen to load the software
onto the hard drive. DATAFLOW RTU programming software is not copy-protected; it may be
copied, or loaded onto more than one computer.
5.
5.1 The DATAFLOW RTU programming software is a DOS-based executable program. System
5.2 Menus and function keys are used for program navigation. Execute menu choices by pressing
5.3 The user interfaces the programming software by modifying highlighted fields of the monitor
5.4 The <F3> and <F4> function keys are used in several fields of the programming software. The
5.4.1 The <F3> UPLOAD key executes the upload function by causing the computer to read the RTU
DATAFLOW RTU PROGRAMMING SOFTWARE
requirement is a PC-compatible computer with a serial port. The availability of a mouse and a
printer is helpful, but not required.
the key of the corresponding menu choice number or by clicking the mouse on the menu
choice. Function key commands are executed when they are displayed by pressing the
corresponding function key or by clicking the mouse on the command.
screen display. Position the cursor in the chosen highlighted field, then type in the desired text.
The cursor can be moved using the mouse, or shifted to the next field by pressing the <TAB>
key. Press <SHIFT> <TAB> to shift the cursor to the previous field. The <ENTER> key, the
arrow keys and page control keys can also be used to move the cursor.
Press the <F1> FIELD HELP key at any time. A Help dialog box will appear on the monitor
screen with a brief explanation of the selected field.
<F3> UPLOAD key transfers configuration data from the DATAFLOW RTU to the computer.
The <F4> DOWNLOAD key transfers configuration data from the computer to the DATAFLOW
RTU. UPLOADed and DOWNLOADed data is transferred over the serial link.
configuration from the DATAFLOW RTU. When the configuration is successfully read, all
programming field values are updated to the current RTU configuration.
NOTE: If an upload is unsuccessfully attempted, none of the field values will update. The
computer indicates an unsuccessful upload by displaying a message in the lower right corner of
the monitor screen and by sounding a two-tone beep.
5.4.2 The <F4> DOWNLOAD key executes the download function by causing the computer to write
all current field values to the DATAFLOW RTU by sending 16 sequential messages.
NOTE: If one or more of these messages is unsuccessfully sent, the RTU configuration may
be corrupted. The computer indicates an unsuccessful download by displaying a message in
the lower right corner of the monitor screen and by sounding a two-tone beep.
When these signals of an unsuccessful download are given, attempt the download operation
again. When the download is successful, the current field values are successfully written so the
RTUs configurations are the same as the computer field values.
( B-3 )
Page 29

Software/Programming
5.5 The <F5>, <F6> and <F9> function keys are used in several fields of the programming
software to perform file functions. The <F5> READ DISK key transfers file data from the
computer hard disk to the computer screen field values. The <F6> WRITE DISK key transfers
file data from the computer-screen field values to the computer hard disk. The <F9> DIR key
displays all files of the proper type that are on the computer hard disk.
CAUTION:
To prevent loss of configuration data, save all RTU configuration files to the hard disk.
NOTE: Selecting a file with the <F9> DIR key DOES NOT LOAD the file. Use the <F5> READ
FILE key after the <F9> DIR key to load the selected file.
5.6 If a printer is connected to the computer system, press the <PRINT SCREEN> key at any time
during the operation of the programming software to generate a hard copy of the current
configuration data.
5.7 A Help file is available for several areas of the programming software. The user can display,
read and close the Help text file while running and programming the software. A copy of the
Help text is included in this manual on pages B-5 to B-10.
NOTE: In the event of a difference between the included text of this file and the actual file in
the software, the computer file supersedes.
5.8 Software Utilities Menu: refer to UTILITIES, Item 3, for system diagnostics and remote
monitoring, which is also covered on pages B-9 - B-10 of this manual.
( B-4 )
Page 30

>>> RTU PROGRAMMER VERSION 3.03 960724 HELP FILE <<<
1.0 RTU System Configuration Screen:
The system configuration screen provides an area for the user to configure
system parameters, send list, repeat list, and fail-safe states. It allows access to
RTU configuration and disk files. It also provides access to the input/output
configuration and the SCADA configuration.
1.1 System Parameters:
The frequency must be the same for all RTUs in a system. The frequency must
be a multiple of the channel spacing. The standard channel spacing for UHF
channels (RTU-450s) is 12.5kHz. VHF radios (RTU-150s) may operate at
either 5 kHz or 12.5 kHz channel spacing. UHF RTUs can be programmed to
operate on either high or low power. High power is approximately 5 Watts. Low
power is approximately 2 Watts. VHF RTUs can only operate on high power.
The ID must be unique for each RTU in the system. Other MODBUS devices in
the system must each also have a unique ID. All RTUs which communicate together
must have the same group number. For version 3.27 firmware, the group is limited to 1.
Multiple groups will be supported in a later version of the firmware.
DATAFLOW RTU
Each RTU can send periodic status messages that are not triggered by a change
on the inputs. The time between these periodic check-ins is variable from 1 second
to 48 days. A check-in time of zero indicates that the periodic check-in is not used,
and messages will be sent on input change only. The check-in interval must be larger
than the number of message attempts times the transmit time (about 180 ms) plus the
listen time. If an acknowledge is not received, the sending RTU tries to send the
message again until the number of message attempts has been exhausted. If, at the
end of these attempts, an acknowledge has not been received, the unit will set its
fail-safe condition.
Some of the variables particular to the radio operation of the RTU are displayed on
the System configuration screen. These values include the carrier detect level, back-off
time, cold start time, and attack time. These values are preset and should not be altered
without consultation with the factory.
The serial port baud rate is selectable between 1200, 2400, 4800, and 9600. Version 3.0
software locks the baud rate at 9600 baud. The radio communicates at a constant 1200
baud. This RF data rate is not selectable.
The RTU can be programmed to operate in sleep mode. In this mode, the RTU acts
as an input device only. The RTUs radio receiver is turned off during normal operation.
The RTU transmits only on status change or at a set check-in interval. After message
transmission, the RTU turns on the receiver and waits for an acknowledge. It then turns
off the receiver and goes back to sleep. The maximum time that the sleeping units
receiver stays on is equal to the awake time.
( B-5 )
Page 31

Software/Programming
>>> RTU PROGRAMMER VERSION 3.03 HELP FILE <<<(continued)
Enabling RF spy mode on one RTU allows that RTU to report all incoming RF
messages over the serial link. These messages can be displayed using the RF Spy
screen available from the Utilities menu. While the RF Spy feature is enabled, the
unit will only operate in RF Spy mode and will not respond to the RF messages.
1.2 Send List:
The send list indicates up to four other RTUs to which this RTU can send its status.
All inputs will be sent to each of the units on the list. Enter an ID of 0 (zero) for any
unused entries. If any of these listed units fail to acknowledge the message, the
fail-safe state indicated by the letter next to that units ID will be set. The lettered
fail-safe states are listed in the lower right corner of the system configuration screen.
1.3 Repeat List:
When this unit receives a message from another unit, it can use the message AND
send it along to other RTUs. This information is configured in the repeat list. Each
incoming message can be repeated to up to four RTUs. The first column indicates
the unit that originates the message and the next four columns show the IDs of the
units which will receive the message.
1.4 Fail-Safe States:
If a unit fails to receive an acknowledge a fail-safe condition can be set. Each of the
four outputs can be set to a distinct fail-safe condition. The analogs can be set to any
value from 0% to 100%. A no change option is also available. For the analog outputs,
the no change is indicated by a 999%. Any number over 101% will be interpreted as a
no change. The programmer will automatically replace this number with 999% when it
downloads the information to the RTU. For the digital outputs, the choices are: open on fail,
close on fail, or no change on fail. The R column indicates whether the output should revert
to its initial condition when the signal is re-acquired. The choices for the field are yes or no.
Example 1: Revert to initial condition is selected for a digital output.
The initial condition for this output is relay open.
The fail-safe condition for this output is relay closed.
This output is not actively controlled by any other RTU.
The relay will be open when the system is started.
The relay will close when the RF link is lost.
The relay will open when the RF link is regained.
Example 2: Revert to initial condition is NOT selected for digital output.
The initial condition for this output is relay open.
The fail-safe condition for this output is relay closed.
This output is not actively controlled by any other RTU.
The relay will be open when the system is started.
The relay will close when the RF link is lost.
The relay will remain closed after the RF link is regained.
( B-6 )
Page 32

DATAFLOW RTU
>>> RTU PROGRAMMER VERSION 3.03 HELP FILE <<<(continued)
1.5 Message Line
The third line from the bottom of the RTU system configuration screen is the message
line. This line displays important information about the status of uploads, downloads,
disk reads, and disk writes.
1.6 Function Keys
The last two lines of the RTU system configuration screen form the function key menu.
To perform one of the listed tasks either press the related function key or click the
command with your mouse. Field help will display a short help message for the field
where the cursor is. Full help will display this text file.
Upload will read the contents of the RTU currently connected to the serial programming
cable and display the configuration on the screen. Download will cause the currently
displayed configuration to be written to the RTU. Read disk will get the configuration
stored in the file named in the file name field at the top of the screen and display this
configuration on the screen. Write disk will save the currently displayed configuration to
the file named at the top of the screen.
Selecting I/O CONFIG will display the RTU input/output configuration screen. SCADA
CONFIG will display the RTU SCADA configuration screen. Press F9 to display a list of
.USR files which you can select. F10 will return the program to the main screen.
2.0 RTU Input/Output Configuration Screen:
The input/output screen allows the user to edit the configuration of the RTU connected
to the serial programming cable. Inputs will be sent to any RTU on send list. Outputs are
controlled by the RTU listed under each output number You must also be certain that the
unit which has the input controlling this output has its inputs and send list properly
configured.
2.1 Inputs:
There are six EXTERNAL analog inputs to the RTU. Although these inputs are all analog,
they can be treated as digital by the microprocessor. The battery voltage is a seventh
INTERNAL input to the RTU.
An eight character long name may be used to identify each of the inputs ( i.e.: TANK1LVL,
PUMP2PWR). These tag names will be stored in the configuration files when they are
saved to disk, but they will not be stored in the RTU due to EEPROM space limitations.
All inputs to the RTU are read by the microprocessor as analogs. The microprocessor
converts the input to a value between 0 and 255 (8-bit resolution). Inputs can be treated
as digital inputs by taking their analog value and comparing it to a digital threshold or set
point to determine whether it is a high or low. Digital inputs cause a message to be created
only when they cross the set point in either direction. Analog inputs cause a message to be
created whenever they change from the previously reported value by a certain amount. This
amount is called the dead zone.
( B-7 )
Page 33

Software/Programming
>>> RTU PROGRAMMER VERSION 3.03 HELP FILE <<<(continued)
If this input is selected as a Digital input, the value in this field will be a threshold. Any value
above this threshold will be a 1 and any value below this threshold will be a zero. A message is
created only when the input crosses from one side of the threshold to the other. If the input type
is analog, the value in this field is a dead zone. The dead zone is minimum change necessary
to initiate a message.
Digital and analog inputs can be inverted. Inverting a digital value will cause a closed contact to
be transmitted as closed contact and vice versa. Inverting an analog input will cause a full scale
reading to be transmitted as a zero. A zero reading will translate to a full scale output at the
receiver.
All input values are sent when a message is created. You can select which inputs will trigger a
message. If no is selected, changes on this input will not cause a message to be sent. The
status of this input will only be sent if an active input changes or it is time for the unit to checkin. If yes is selected, changes on this input will cause a message to be sent.
The time delay is the length of time a signal must change before it is processed as a valid
change. A momentary change with a duration less than the time delay will be ignored.
2.2 Outputs:
The RTU has two digital outputs and two analog outputs. These two analog outputs share their
external connection with two of the inputs. They are hardware selectable between inputs and
analog outputs.
An eight character long name may be used to identify each of the outputs( i.e.: TANK1LVL,
PUMP2PWR). These tag names will be stored in the configuration files when they are saved to
disk, but will not be stored in the RTU due to EEPROM space limitations.
A used output is controlled by another RTUs input. When this RTU receives a message from
the other RTU, it sets its corresponding output to the same value. The from ID is the ID number
of the RTU which has the input controlling this output. The from location is the input number of
the input which controls this output. This input number corresponds to the input number in the
top half of the screen for the RTU listed in the from ID field.
Example 3: RTU #1 has 1 digital input and 1 analog input which must be transmitted to RTU
#2. The digital input must be inverted. The threshold between a high and a low value is half
scale. The digital input is a noisy signal and we do not want a momentary glitch to trigger a
false alarm. However, we want any state which persists for more than 5 seconds to be treated
as a true signal. The analog input is a 0 (zero) V to 5 V input. We do not want to receive a
status report unless the input changes by more than 0.5 V. Typical entries on the input
configuration of RTU # 1 would be:
( B-8 )
Page 34

>>> RTU PROGRAMMER VERSION 3.03 HELP FILE <<<(continued)
Input # 1 # 2 # 3 # 4 # 5 # 6 BATTERY
DATAFLOW RTU
Tag Name
Initiate Xmit
Type DADDDD A
Invert YES NO NO NO NO NO NO
Threshold / 50 % 10 % 50 % 50 % 50 % 50 % 1.00 V
Dead Zone
Time Delay
D=Digital, A=Analog
YES YES NO NO NO NO NO
5.00 S 0.25 S 0.25 S 0.25 S 0.25 S 0.25 S 0.25 S
The corresponding entries for the output configuration of RTU # 2 would be:
Output Digital 1 Digital 2 Analog 1 Analog 2
Tag Name
Used
Init Condition OPN CLO 0 % 0 %
From ID 1010
From Location INPUT 1 INPUT 1 INPUT 2 INPUT 1
Rcv Check-In 0: 0: 0: 0 0: 0: 0: 0 0: 0: 0: 0 0: 0: 0: 0
Fail-Safe State EFGH
YES NO YES NO
When the RTU is turned on, the outputs will be set to the initial conditions. These values will
remain on the outputs until an incoming message changes the outputs or until a fail-safe
condition is set. Both used and unused outputs can have an initial condition and a fail-safe
state.
This RTU can be programmed to expect a check-in from other units. If this check-in
message is jammed or the other RTU fails to respond, this RTU can set a fail-safe
condition. The value in this field is the amount of time this RTU must go without receiving a
message from the other RTU before it can set its fail-safe state. Each From ID can have
only one receive check-in time. Place this check-in time in the first column which contains
the appropriate From ID.
The letter in the fail-safe state field indicates which fail-safe state will be used upon loss of
signal from the unit listed in From ID. The fail-safe states are listed in the lower right corner
of the system configuration screen.
2.3 Function Keys
The bottom two rows of the RTU input/output configuration screen form the function key
menu. Select an input field and press F1 to display help for the selected field. Press F2 to
display this full help document. Press F10 to return to the RTU system configuration screen.
3.0 RTU SCADA Configuration Screen
The SCADA configuration screen lists four SCADA points which can be stored in the RTU
EEPROM. The function key menu provides access to the full SCADA configuration. SCADA
configuration allows the user to connect one RTU to a supervisory control and data
acquisition program and poll remote RTUs over RF. The SCADA program must use the
MODBUS protocol. The SCADA configuration must reside in the one RTU connected
directly to the SCADA program. That RTU uses the routing information in the SCADA
configuration to send an RF message to the addressed RTU.
( B-9 )
Page 35

Software/Programming
>>> RTU PROGRAMMER VERSION 3.03 HELP FILE <<<(continued)
3.1 EEPROM SCADA Points
Four SCADA points can be stored in EEPROM. If power to the RTU is temporarily lost
and then returns, the EEPROM points will not be lost. The repeater columns list, in order,
the repeaters between this RTU and the End RTU. The To ID is the RTU or other MODBUS
device which the SCADA program will request information from. If the To ID is an RTU, the
To ID and End RTU will be identical. If the To ID is another MODBUS device, the End RTU
must be directly connected to the MODBUS device by a serial link.
Example 4:
|--------------- | | . . . . . . .. .. .. .. ..| . . . . . . .. .. |
| SCADA | Serial | RF link 1-2 | RF link 2-3 | Serial |------------|
| Controller link |---------| |-------| |-------| link |Modbus|
| | | RTU | | RTU | | RTU | | Device |
|--------------| | 1 | | 2 | | 3 | | 4 |
| ||||| || | |
|--------------| |------------| |------------ | |----------- | |------------ |
The SCADA controller is directly connected to RTU 1 by a serial link. The SCADA controller
polls RTU 1, RTU 2, RTU 3, and MODBUS Device 4. The EEPROM configuration for RTU 1
should be:
End
Repeaters RTU TO
1234 ID ID
EEPROM Point # 1 0000 2 2
EEPROM Point # 2 2000 3 3
EEPROM Point # 3 2000 3 4
EEPROM Point # 4 0000 0 0
In the previous example, there are no repeaters between RTU 1 and RTU 2. If the SCADA
controller polls RTU 2, the last RTU in the path is RTU 2. If the SCADA controller polls RTU
3, then RTU 2 acts as a repeater. The last RTU is RTU 3 Entry number 3 is the same as
entry number 2 except that the final address is MODBUS device 4. RTU 3 is the end RTU.
It transmits the message to the MODBUS device serially.
( B-10 )
Page 36

DATAFLOW RTU
6. MODBUS MEMORY MAP
6.1 The DATAFLOW RTU supports three types of MODBUS messages; it will recognize:
· READ OUTPUT REGISTER function code 03
· PRESET SINGLE REGISTER function code 06
· PRESET MULTIPLE REGISTER function code 10 (hexadecimal).
All other messages will be ignored.
6.2 The DATAFLOW RTU operates in the MODBUS RTU mode with 8 data bits, 1 stop bit
and no parity bit.
6.3 The DATAFLOW RTU accesses MODBUS information by two different methods:
· Direct data access, which involves direct polling of the RTUs registers. When
this method is used, RTUs not directly connected to the MODBUS controller are
polled via the RF link. NOTE: Direct data access can result in unacceptably high
levels of RF traffic.
· Stored data method, in which copies of the current state of each RTU in the
system is stored in the memory of the RTU connected to the MODBUS
controller. Having current data stored eliminates the need to poll RF.
NOTE: For a more detailed explanation of these two methods, refer to Examples 6
and 7 in the following section of this manual.
6.3.1 Following is a M
RTU REGISTER RTU ADDRESS (HEX) DATA RANGE
INPUT 1 0050 00H to FFH
INPUT 2 0051 00H to FFH
INPUT 3 0052 00H to FFH
INPUT 4 0053 00H to FFH
INPUT 5 0054 00H to FFH
INPUT 6 0055 00H to FFH
INPUT VOLTAGE 0056 00H to FFH
RSSI 0057 07H to 50H
ANALOG OUTPUT 2 009C 00H to FFH
ANALOG OUTPUT 1 009D 00H to FFH
DIGITAL OUTPUTS 009E 00H to 03H
DIGITAL 1 OUTPUT OPEN 000000X0 B
DIGITAL 1 OUTPUT CLOSED 000000X1 B
DIGITAL 2 OUTPUT OPEN 0000000X B
DIGITAL 2 OUTPUT CLOSED 0000001X B
XMIT CONTROL 00C5
XMIT OFF 01 to FF H
XMIT ON 00 H
XMIT TEST 00C2 00H to 0FH
ì P CHECKSUM 005F
SELFTEST REGISTER 00C8
CLOCK TEST FAIL 1XXXXXXX B
CLOCK TEST PASS 0XXXXXXX B
RAM TEST FAIL X1XXXXXX B
RAM TEST PASS X0XXXXXX B
ODBUS memory map of the DATAFLOW RTU for direct data access.
( B-11 )
Page 37

Software/Programming
6.3.2 DECIMAL MODBUS MEMORY MAP AND TABLES
6.3.2.1 Decimal MODBUS memory map for stored data access:
RTU ID InputVoltage Input 6 Input 5 Input 4 Input 3 Input 2 Input 1 Counter
0 4104 4105 4106 4107 4108 4109 4110 4111
1 4168 4169 4170 4171 4172 4173 4174 4175
2 4232 4233 4234 4235 4236 4237 4238 4239
3 4296 4297 4298 4299 4300 4301 4302 4303
· · · · · · · · ·
· · · · · · · · ·
· · · · · · · · ·
253 20296 20297 20298 20299 20300 20301 20302 20303
254 20360 20361 20362 20363 20364 20365 20366 20367
255 20424 20425 20426 20427 20428 20429 20430 20431
6.3.2.2 Decimal equation table for calculating addresses:
Input Voltage Address = RTU ID x 64 + 4104 Input 3 Address = RTU ID x 64 + 4108
Input 6 Address = RTU ID x 64 + 4105 Input 2 Address = RTU ID x 64 + 4109
Input 5 Address = RTU ID x 64 + 4106 Input 1 Address = RTU ID x 64 + 4110
Input 4 Address = RTU ID x 64 + 4107 Message Counter Address = RTU ID x 64 + 4111
6.3.2.3 Equation table to convert decimal register values to voltage and current values:
Register Voltage Conversion (Volts) Current Conversion (mAmps)
Input 1 to (DATA ÷ 255) x 5 (DATA ÷ 255) x 20
Input Voltage (i.e.: Battery) (DATA ÷ 255) x 5 x (416 ÷ 100) N/A
Analog Output 1 and 2 (DATA ÷ 255) x 5 (DATA ÷ 255) x 20
Message
6.3.3 HEXADECIMAL MODBUS MEMORY MAP AND TABLES
6.3.3.1 Hexadecimal MODBUS memory map for stored data access:
RTU ID InputVoltage Input 6 Input 5 Input 4 Input 3 Input 2 Input 1 Counter
00 1008 1009 100A 100B 100C 100D 100E 100F
01 1048 1049 104A 104B 104C 104D 104E 104F
02 1088 1089 108A 108B 108C 108D 108E 108F
03 10C8 10C9 10CA 10CB 10CC 10CD 10CE 10CF
· · · · · · · · ·
· · · · · · · · ·
· · · · · · · · ·
FD 4F48 4F49 4F4A 4F4B 4F4C 4F4D 4F4E 4F4F
FE 4F88 4F89 4F8A 4F8B 4F8C 4F8D 4F8E 4F8F
FF 4FC8 4FC9 4FCA 4FCB 4FCC 4FCD 4FCE 4FCF
Message
6.3.3.2 Hexadecimal equation table for calculating addresses:
Input Voltage Address = RTU ID x 40 + 1008
Input 6 Address = RTU ID x 40 + 1009
Input 5 Address = RTU ID x 40 + 100A
Input 4 Address = RTU ID x 40 + 100B
Message Counter Address = RTU ID x 40 + 100F
Input 3 Address = RTU ID x 40 + 100C
Input 2 Address = RTU ID x 40 + 100D
Input 1 Address = RTU ID x 40 + 100E
6.3.3.3 Equation table to convert hexadecimal register values to voltage and current values:
Register Voltage Conversion (Volts) Current Conversion (mAmps)
Input 1 to 6 (DATA H ÷ FF H) x 5 (DATA H ÷ FF H) x 20
Input Voltage (i.e.: Battery) (DATA H ÷ FF H) x 5 * 416 ÷ 100 N/A
Analog Output 1 and 2 (DATA H ÷ FF H) x 5 (DATA H ÷ FF H) x 20
( B-12 )
Page 38

DATAFLOW RTU
6.4 Load the FULL SCADA CONFIG, using RTU Programming Software. The configuration is
stored in RTU RAM, which has a large capacitor to hold the information in memory for an
extended period of time 3 months or longer. If the stored configuration is lost, reload it with
the RTU Programming Software.
6.4.1 If the application requires a M
OMEGA for the proper procedure. This procedure varies depending on the type of M
ODBUS controller to download the FULL SCADA CONFIG, consult
ODBUS
controller you are using.
CAUTION:
For Firmware Versions earlier than 3.25 (released in the 2nd quarter of 1998), in a SCADA system,
use unit IDs or M
IDs and addresses from 1 to 39.
ODBUS addresses from 40 to 255 only. Communication errors may result from using
7. TECHNICAL NOTES
7.1 CLEARING SERIAL RESPONSE DELAY for Firmware Version 3.27 or later: this note explains how to set
the DATAFLOW RTU serial response delay to 0 (zero). DATAFLOW RTU configuration can be changed
either before or after programming the serial delay. (Any other aspect of Configuration, except Serial
Response Delay, is accessed from the Configuration Screen.)
7.1.1 From the Main Screen, press 3 to select Utilities.
7.1.2 From the Utilities Menu, press 1 to select EEPROM Block Edit.
7.1.3 Press 3 to Upload.
7.1.4 Type the hexadecimal value 00 (zero, zero) into Location 01A6. See Figure B1, below.
7.1.5 Press F4 to download the data to the DATAFLOW RTU.
7.1.6 Press F10" to Exit the EEPROM block edit screen.
7.1.7 Press R to return to the Main Screen.
************** RTU EEPROM CONFIGURATION SCREEN **************
Device ID: 01 File Name: DEFAULT.cnf
Address -0-1 -2-3 -4-5 -6-7 -8-9 -A-B -C-D -E-F
$0100 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$0110 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
---------- ------------------------------------------------------------------------------------------$0120 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$0130 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$0140 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$0150 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$0160 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$0170 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$0180 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$0190 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$01A0 XXXX XXXX XXXX 00XX XXXX XXXX XXXX XXXX
$01B0 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$01C0 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$01D0 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$01E0 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
$01F0 XXXX XXXX XXXX XXXX XXXX XXXX XXXX XXXX
Figure B1 - Configuration Screen
00 programmed
into Location 01A6
( B-13)
Page 39

Software/Programming
7.2 COPYING CONFIGURATION between DATAFLOW RTU Units: This note explains how to preserve
programmed default settings.
TO COPY CONFIGURATION FROM AN OLDER-FIRMWARE DATAFLOW RTU TO A NEWER-
FIRMWARE DATAFLOW RTU, while preserving the default settings of additional programmable
features:
7.2.1 Connect older-firmware unit to the serial cable and power supply.
7.2.2 From the Programmer Main Screen, press 2 to select DATAFLOW RTU configuration.
7.2.3 Press F3 to Upload.
7.2.4 Enter a filename in the File Name field.
7.2.5 Press F6 to write this configuration to the (named) file.
7.2.6 Disconnect the older-firmware unit from the serial cable and power supply.
7.2.7 Connect the newer-firmware unit to the serial cable and power supply
7.2.8 Press F3 to Upload from the new unit.
7.2.9 Enter the filename from Step 4 in the File Name field.
7.2.10 Press F5 to Read the (named) file.
7.2.11 Press F4 to download the configuration to the newer-firmware unit.
7.2.12 Press F10 to Return to the Programmer Main Screen.
7.3 TO COPY ALL INFORMATION from source-configuration DATAFLOW RTU to same-version target
DATAFLOW RTU:
7.3.1 Connect older-firmware unit to the serial cable and power supply.
7.3.2 From the Programmer Main Screen, press 2 to select DATAFLOW RTU configuration.
7.3.3 Press F3 to Upload.
7.3.4 Disconnect the source-configuration unit from the serial cable and power supply.
7.3.5 Connect the (same-version) target unit to the serial cable and power supply.
7.3.6 Press F4 to download the configuration to the target unit.
7.3.7 Press F10 to Return to the Programmer Main Screen.
8. APPLICATION EXAMPLES
8.1 The following examples provide demonstrations of OMEGA DATAFLOW RTU operation. All
examples are included and can be loaded as Software Programming configuration files on the
accompanying programming disk.
8.1.1 These are not stand alone examples. Examine and understand each example in sequence
before proceeding to the next. These illustrations and demonstrations have been designed to
run in a laboratory environment using dummy loads for antennas.
8.1.2 The frequency programmed into the configuration files is 460 MHz. If your RTU system does
not operate in this band, change the configuration file frequency to reflect a value you can use.
8.1.3 UPLOAD or DOWNLOAD commands that change RTU configuration also disable the
transmitter. Cycle the RTU by turning it OFF then ON to re-enable the transmitter and reestablish normal RTU operation.
( B-14 )
Page 40

DATAFLOW RTU
EXAMPLE 1
8.2 EXAMPLE 1 is a pair of DATAFLOW RTUs having two digital channels and two analog
channels in each direction; each RTU is configured for a maximum of five (5) message
attempts. If an RTU detects loss of RF link, both relay outputs close, and both analog
outputs are driven to full scale. The inputs and outputs are mapped to each other as
shown in the following table:
RTU ID 1 RF LINK RTU ID 2
Input 1 connected to Digital Output 1
Input 2 Digital Output 2
Input 3 Analog Output 1
Input 4 Analog Output 2
Digital Output 1 Input 1
Digital Output 2 Input 2
Analog Output 1 Input 3
Analog Output 2 Input 4
8.2.1 RTU ID 1 SETUP: Example 1 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B2 - EXAMPLE 1 RTU ID 1 Wiring Diagram, shown on
page B-26. Load Software Programming configuration file EXP1ID1.USR into RTU ID 1.
8.2.2 RTU ID 2 SETUP: Example 1 requires the other DATAFLOW RTU to be wired and its
hardware configured according to Figure B3 - EXAMPLE 1 RTU ID 2 Wiring Diagram,
shown on page B-27. Load Software Programming configuration file EXP1ID2.USR into
RTU ID 2.
8.2.3 EXPLANATION: Example 1 illustrates basic RTU operation. Examine the configuration files
of the RTUs to understand the following items before advancing to Example 2:
· (RTU) ID
· SEND LIST
· FAIL-SAFE STATE
· I/O CONFIG
8.2.3.1 (RTU) ID is a unique address given to each RTU in a system. Example 1 uses ID numbers
1 and 2. The ID number is compared to the ID number of every incoming message. When
the ID number on an incoming message matches the (unit) ID number, the RTU processes
the message and sends an acknowledgment. The RTU ignores the message if the ID
number does not match.
NOTE: Use any unique number(s) from 1 to 255 to assign ID numbers.
8.2.3.2 SEND LIST is the list of IDs used by the RTU when transmitting messages. Each outgoing
message has to ID n attached to it. In Example 1, RTU ID 1 has to ID 2 in its SEND LIST
and RTU ID 2 has to ID 1 in its SEND LIST. Hence, RTU ID 1 transmits messages
intended only for RTU ID 2, and RTU ID 2 transmits messages intended only for RTU ID 1.
Because each RTU in Example 1 sends information to only one ID, other SEND LIST
values are set for 0.
NOTE: The maximum number of ID entries in the SEND LIST is four.
( B-15 )
(Example 1 continued on next page)
Page 41

Software/Programming
EXAMPLE 1 (continued)
8.2.3.3 The FAIL-SAFE STATE table controls RTU outputs when the RTU detects a loss of RF
link. Because Example 1 has only one entry in the SEND LIST of each RTU, only FAILSAFE STATE A is used. If RTU ID 1 detects loss of RF link, RTU ID 1 outputs are
controlled according to its FAIL-SAFE STATE A; if RTU ID 2 detects loss of RF link,
RTU ID 2 outputs are controlled according to its FAIL-SAFE STATE A.
8.2.3.3.1 The loss of RF link is detected by a RTU according to the following process: After a
RTU transmits a message, it waits for acknowledge.
· If acknowledge is received, the RF link is good and the process ends.
· If acknowledge is not received, the RTU retransmits the message, repeating the
sequence until reaching the maximum number of retransmit attempts. The
process ends with the RTU detecting loss of RF if the last (maximum number)
retransmit is made with no acknowledge being received.
8.2.3.4 I/O CONFIG is Input/ Output control of the RTU displayed in the Programming Software
I/O configuration screen. Examine the following items for Example 1:
8.2.3.4.1 Inputs 1 and 2 are configured to be inverted digital inputs.
NOTES: Set digital inputs INVERT to YES to make an open digital input produce an open
relay output and a closed digital input produce a closed relay output.
Set the INVERT for analog inputs 3 and 4 to NO to produce a positive transfer
function on an output.
8.2.3.4.2 All four outputs are used. The initial condition the state an output is forced to upon
power-on is set for relays to be open and analog outputs to be forced to 0 scale.
8.2.3.4.3 FROM ID is the transmitting RTU ID number; FROM ID numbers are listed in the
following chart:
FROM ID (RTU ID #)
RTU ID 1 2
RTU ID 2 1
8.2.3.4.4 FROM LOC is the number of the input that controls the output; FROM LOC numbers
are listed in the following chart:
FROM LOC (INPUT #)
Digital Output 1 1
Digital Output 2 2
Analog Output 1 3
Analog Output 2 4
( B-16 )
Page 42

DATAFLOW RTU
EXAMPLE 2
8.3 EXAMPLE 2 configures three DATAFLOW RTUs with one connected to two others. RTU
ID 1 has two digital inputs, two digital outputs and two analog outputs. RTU ID 2 and RTU
ID 3 each have one digital input, one digital output and one analog input. The inputs and
outputs are mapped to each other as shown in the following tables:
RTU ID 1 RF LINK 1 RTU ID 2
Input 1 connected to Digital Output 1
Input 2
Input 3
Input 4
Digital Output 1 connected to Input 1
Digital Output 2
Analog Output 1 connected to Input 2
Analog Output 2
RTU ID 1 RF LINK 2 RTU ID 3
Input 1
Input 2 connected to Digital Output 1
Input 3
Input 4
Digital Output 1
Digital Output 2 connected to Input 1
Analog Output 1
Analog Output 2 connected to Input 2
8.3.1 RTU ID 1 SETUP: Example 2 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B4 - EXAMPLE 2 RTU ID 1 Wiring Diagram, shown on page
B-28. Load Software Programming configuration file EXP2ID1.USR into RTU ID 1.
8.3.2 RTU ID 2 SETUP: Example 2 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B5 - EXAMPLE 2 RTU ID 2 Wiring Diagram, shown on page
B-29. Load Software Programming configuration file EXP2ID2.USR into RTU ID 2.
8.3.3 RTU ID 3 SETUP: Example 2 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B6 - EXAMPLE 2 RTU ID 3 Wiring Diagram, shown on page
B-30. Load Software Programming configuration file EXP2ID3.USR into RTU ID 3.
8.3.4 EXPLANATION: Example 2 illustrates point-to-multipoint RTU operation. Examine the
configuration files of these three RTUs. Be certain to understand the following items before
advancing to Example 3:
· SEND LIST
· FAIL-SAFE STATE
· I/O CONFIG
The following text provides detailed descriptions of the above items.
8.3.4.1 SEND LIST is the list of IDs used by the RTU when transmitting messages. Each outgoing
message has to ID n attached to it. In Example 2, RTU ID 1 has to ID 2 and to ID 3 in
its SEND LIST. RTU ID 1 transmit messages first to RTU ID 2. When an acknowledge is
received from RTU ID 2 or when the maximum number of attempts is reached, the
message is then transmitted to RTU ID 3.
( B-17 )
(Example 2 continued on next page)
Page 43

Software/Programming
EXAMPLE 2 (continued)
8.3.4.2 The FAIL-SAFE STATE table controls the RTU outputs when the RTU detects a loss of
RF link. Because Example 2 has two entries in the SEND LIST, both FAIL-SAFE states
A & B are used. If RTU ID 1 detects a loss of RF link from RTU ID 2, outputs are
controlled according to FAIL-SAFE STATE A. If RTU ID 1 detects a loss of RF link from
RTU ID 3, outputs are controlled according to FAIL-SAFE STATE B.
8.3.4.3 I/O CONFIG is Input/ Output control of the RTU displayed in the Programming Software
I/O configuration screen.
8.3.4.3.1 In Example 2, RTU ID 1, Input 1 and Input 2; RTU ID 2, Input 1 and RTU ID3, Input 1
are configured to be inverted digital inputs.
8.3.4.3.2 In Example 2, all four outputs of RTU ID 1 are used, RTU ID 2, Digital Output 1 is used,
and RTU ID 3, Digital Output 1 is used. The initial condition the state an output is
forced to upon power-on is set for all relays to be open and all analog outputs to be
forced to 0 scale.
8.3.4.3.3 In Example 2, FROM ID is the ID number of the transmitting RTU; FROM ID numbers
are listed in the following 2 charts:
RTU ID 1 FROM ID (Transmitting RTU ID)
Digital Output 1 2
Analog Output 1 2
Digital Output 2 3
Analog Output 2 3
RTU ID 2 &RTU ID 3 FROM ID (Transmitting RTU ID)
Digital Output 1 1
8.3.4.3.4 FROM LOC is the number of the input controlling the output; FROM LOC numbers are
listed in the following chart:
RTU ID 1 FROM LOC (Controlling Input)
Digital Output 1 1
Digital Output 2 1
Analog Output 1 2
Analog Output 2 2
( B-18 )
Page 44

DATAFLOW RTU
EXAMPLE 3
8.4 EXAMPLE 3 configures DATAFLOW RTU inputs to illustrate THRESHOLD, DEAD ZONE
and TIME DELAY. The configuration includes Digital Input 1 having a 25% Threshold and
Digital Input 2 having a 75% Threshold and a 5-second Time Delay; Analog Input 3 having
a 10% Dead Zone and Analog Input 2 having a 20% Dead Zone. The configuration of
Example 3 is similar to that of Example 1.
8.4.1 RTU ID 1 SETUP: Example 3 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B2 - EXAMPLE 1 RTU ID 1 Wiring Diagram, shown on page
B-26. Load Software Programming configuration file EXP3ID1.USR into RTU ID 1. Replace
the switches connected to Input 1 and Input 2 with a 100 kOhm potentiometer. Connect a
multimeter to measure voltage across the potentiometer.
8.4.2 RTU ID 2 SETUP: Example 3 requires the other DATAFLOW RTU to be wired and its
hardware configured according to Figure B3 - EXAMPLE 1 RTU ID 2 Wiring Diagram,
shown on page B-27. Load Software Programming configuration file EXP1ID2.USR into
RTU ID 2.
8.4.3 EXPLANATION: THRESHOLD/ DEAD ZONE is a value that differs depending on the type
of Input.
· For a DIGITAL Input, the value is THRESHOLD, the border between a digital HIGH
and LOW. Any value above the border as decoded by the RTU is a HIGH; any value
below the border as decoded by the RTU is a LOW.
· For an ANALOG Input, the value is DEAD ZONE, the amount of change the Input
must incur to transmit a message.
8.4.3.1 The THRESHOLD of RTU ID 1, Input 1 is programmed to be 25%, the value relating to 1.25
Volts on the multimeter. RTU ID 2, Digital Output 1 opens with a multimeter reading above
1.25 Volts; RTU ID 2, Digital Output 1 closes with a multimeter reading below 1.25 Volts.
NOTE: Because of the internal 20 kOhm resistor, the highest voltage possible across the
100 kOhm potentiometer on Input 1 is 4.2 Volts.
8.4.3.2 The THRESHOLD of RTU ID 1, Input 2 is programmed to be 75%, the value relating to 3.75
Volts on the multimeter. RTU ID 2, Digital Output 2 OPENS when the multimeter reading is
above 3.75 Volts; RTU ID 2, Digital Output 2 CLOSES when the multimeter reading is
below 3.75 Volts. NOTE: See Paragraph 7.4.4 for details of the TIME DELAY programmed
into Input 2.
8.4.3.3 The DEAD ZONE of RTU ID 1, Input 3 is programmed to be 10 %. Cycle the power of the
RTU (turn the RTU power OFF, then ON) to ensure the current source for Input 3 is 10 mA.
Change the value of the current source to Input 3. RTU ID 2, Analog Output 1 should not
change until RTU ID 1, Input 3 changes to over 11 mA or under 9 mA.
8.4.3.4 The DEAD ZONE of RTU ID 1, Input 4 is programmed to be 20 %. Cycle the power of the
RTU to ensure the voltage value for Input 3 is 2 Volts. Change the value of the voltage
source to Input 3. RTU ID 2, Analog Output 2 should not change until RTU ID 1, Input 4
changes to over 2.4 Volts or under 1.6 Volts.
8.4.4 EXPLANATION: TIME DELAY is the amount of time an input must remain changed before
the RTU will consider the change valid Digital Input 2 must remain changed for at least
5 seconds. If the current state of this input is LOW, changing the state to HIGH for less than
5 seconds then returning the state to LOW will not cause the RTU to transmit a message.
TIME DELAY is used to ignore false activation and glitches on an input.
( B-19 )
Page 45

Software/Programming
EXAMPLE 4
8.5 EXAMPLE 4 configures two RTUs to illustrate XMIT CHECK-IN and RCV CHECK-IN
intervals, and R (Revert) FAIL-SAFE STATE of the DATAFLOW RTU. RTU ID 1 sends one
contact closure to RTU ID 2. All Digital Outputs are OPEN at power-on.
· When RTU ID 1 detects a loss of RF link, both Digital Outputs close. When the RF
link is re-established, Digital Output 1 opens and Digital Output 2 remains closed.
· When RTU ID 2 detects a loss of RF link, Digital Output 1 will open and Digital
Output 2 will close. When the RF link is re-established, Digital Output 1 produces
the proper status from RTU ID 1 and Digital Output 2 opens.
· The RF link is tested at least every 10 seconds.
NOTE: Example 4 uses a XMIT CHECK-IN interval of 10 seconds, purposely a short interval for
demonstration purposes. In real applications, use longer check-in intervals to help maintain the life
span of the RTU the longer the check-in interval, the fewer transmissions the RTU makes.
8.5.1 RTU ID 1 SETUP: Example 4 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B7 - EXAMPLE 4 RTU ID 1 Wiring Diagram shown on page
B-31. Load Software Programming configuration file EXP4ID1.USR into RTU ID 1.
8.5.2 RTU ID 2 SETUP: Example 4 requires the other DATAFLOW RTU to be wired and its
hardware configured according to Figure B8 - EXAMPLE 4 RTU ID 2 Wiring Diagram
shown on page B-32. Load Software Programming configuration file EXP4ID2.USR into
RTU ID 2.
8.5.3 EXPLANATION:
· RTU ID 1 XMIT CHECK-IN is set to 10 seconds.
· RTU ID 2 RCV CHECK-IN is set to 12 seconds.
NOTE: The difference in the XMIT CHECK-IN and RCV CHECK-IN times allows for tolerance
differences in the two RTUs.
8.5.3.1 RTU ID 1 sends a message (XMIT CHECK-IN) every 10 seconds whether or not a change
occurs on the input. If a valid response is not received within 12 seconds, FAIL-SAFE
STATE A is executed. This ensures that 10 seconds is the longest period of time RTU ID 2
can be inactive before RTU ID 1 determines the RF link has failed.
8.5.3.2 RTU ID 2 requires a valid message (RCV CHECK-IN) from RTU ID 1 every 12 seconds or
less. If a valid message is not received within 12 seconds, FAIL-SAFE STATE E is
executed. This ensures that 12 seconds is the longest period of time RTU ID 1 can be
inactive before RTU ID 2 determines the RF link has failed.
8.5.3.3 The R (Revert) columns of the FAIL-SAFE STATE table determines the state of an output
when RF link is re-established.
· With R (Revert) setting Y, the output is forced to its initial condition. With R
(Revert) setting N, the output remains in its current state.
· If the output is controlled by another RTU, the controlling input state determines the
state of the output; R (Revert) setting is not valid.
( B-20 )
Page 46

DATAFLOW RTU
EXAMPLE 5
8.6 EXAMPLE 5 illustrates a DATAFLOW RTU system with one RTU configured as a repeater.
Connect the RTUs according to the following 2 tables:
RTU END 1 RF LINK 1 RTU END 2
Input 1 connected to Digital Output 1
Input 2
Input 3
Input 4
Digital Output 1
Digital Output 2
Analog Output 1 connected to Input 1
Analog Output 2
RTU END 1 RF LINK 2 RTU END 3
Input 1
Input 2 connected to Digital Output 1
Input 3
Input 4
Digital Output 1
Digital Output 2
Analog Output 1
Analog Output 2 connected to Input 1
NOTE: In Example 5:
· RTU ID 1 has line of sight with RTU ID 2, and RTU ID 2 has line of sight with RTU ID 3.
· RTU ID 1 DOES NOT HAVE line of sight with RTU ID 3.
· RTU ID 2 is configured as a repeater between RTU ID 1 and RTU ID 3.
8.6.1 RTU ID 1 SETUP: Example 5 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B9 - EXAMPLE 5 ID 1 Wiring Diagram on page B-33. Load
Software Programming configuration file EXP5ID1.USR into RTU ID 1.
8.6.2 RTU ID 2 SETUP: Example 5 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B10 - EXAMPLE 5 ID 2 Wiring Diagram on page B-34. Load
Software Programming configuration file EXP5ID2.USR into RTU ID 2.
8.6.3 RTU ID 3 SETUP: Example 5 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B11 - EXAMPLE 5 ID 3 Wiring Diagram on page B-35. Load
Software Programming configuration file EXP5ID3.USR into RTU ID 3.
8.6.4 EXPLANATION: Using an RTU as a digital repeater can increase DATAFLOW RTU range.
This RTU performs both repeating and normal Input/ Output functions.
Examine the configurations of the three RTUs. Notice the fail-safe performance of each
unit.
· RTU ID 1 send list contains only ID 2.
· RTU ID 2 first line of the REPEAT LIST contains FROM ID 1 and TO ID 3; second
line of the REPEAT LIST contains FROM ID 3 and TO ID 1.
· RTU ID 3 send list contains only ID 2.
NOTE: You must extend the listen time of ID1 and ID3 to .8 seconds to allow for the repeat function.
( B-21 )
Page 47

Software/Programming
EXAMPLE 6
8.7 EXAMPLE 6 demonstrates the DATAFLOW RTU as a MODBUS device using direct data
access. The configuration consists of a remote RTU with another RTU connected to a
MODBUS controller, utilizing RTU Programming Software as the MODBUS controller. Each
RTU has five digital inputs and one analog input.
NOTE: In real applications the MODBUS controller is a PLC or a SCADA program operating with a
MODBUS driver.
8.7.1 RTU ID 1 SETUP: Example 6 requires one DATAFLOW RTU to be wired and its hardware
configured according to Figure B12 - EXAMPLE 6 ID 1 Wiring Diagram on page B-36. Load
Software Programming configuration file EXP6ID1.USR into RTU ID 1.
When configuration of RTU ID 1 is completed, turn the RTU power OFF then back ON to
ensure the RTU microprocessor addressing data is updated. Refer to the NOTE with 8.7.4 for
further details.
8.7.2 RTU ID 2 SETUP: Example 6 requires the other DATAFLOW RTU to be wired and its
hardware configured according to Figure B13 - EXAMPLE 6 ID 2 Wiring Diagram on page
B-37. Load Software Programming configuration file EXP6ID2.USR into RTU ID 2.
8.7.3 EXPLANATION: Although the RTU can operate in two different MODBUS modes, Example 6
demonstrates direct access only. In this mode, the remote RTU is polled by RF whenever data
is required, generating a large amount of RF traffic.
NOTE: This configuration is recommended only for applications having long polling intervals (over 2
minutes) and few RTUs (fewer than 5).
8.7.4 Examine the configuration of RTU ID 1 and RTU ID 2. Because the RTUs are no longer in
control of the process and are simply MODBUS devices under control of the MODBUS
controller:
· XMIT CHECK IN is set to 0.
· SEND LIST is all 0s.
· REPEAT LIST is all 0s.
· All inputs have INITIATE XMIT set to NO.
· All outputs have USED set to NO.
NOTE: Examine the SCADA CONFIG. screen display for RTU ID 1, containing four SCADA points stored
in EEPROM. The four points load into FULL SCADA list at power ON. Cycling the power updates data for
this screen. In Example 6, the END RTU ID and the TO ID are the same ID because an RTU is the
MODBUS device being controlled.
( B-22 )
(Example 6 continued on next page)
Page 48

EXAMPLE 6 (continued)
8.7.5 Execute the SYSTEM MONITOR - UTILITIES screen to view two ID fields:
The top left field on the UTILITIES screen selects which RTU is active when polling inputs or
setting outputs. This field is the only field used in Example 6 configuration.
· Set this ID to 1, then execute the SINGLE POLL command. The current input status of
RTU ID 1 displays on the screen.
· Change the ID to 2, then execute the SINGLE POLL command. The current input status
of RTU ID 2 displays on the screen.
· Execute the START POLL command to cause continuous polling at 5-second intervals.
(If RTU ID 1 Inputs are changed, the changes are reflected in screen updates.)
· Execute STOP POLL command to stop polling.
NOTE: The lower left ID field is used to select which RTU is active when a transmitter test is
requested not needed for Example 6 configuration.
DATAFLOW RTU
( B-23 )
Page 49

Software/Programming
EXAMPLE 7
8.8 EXAMPLE 7 demonstrates the DATAFLOW RTU as a MODBUS device using stored data
access. The configuration consists of a remote RTU with another RTU connected to a MODBUS
controller. Example 7 uses RTU Programming Software as the MODBUS controller. The remote
RTU and the RTU connected to the MODBUS controller each have five digital inputs and one
analog input.
NOTE: In real applications the MODBUS controller is a PLC or a SCADA program operating
with a MODBUS driver.
8.8.1 RTU ID 1 SETUP: Example 7 requires one DATAFLOW RTU to be wired and its hard-ware
configured according to Figure B12 - EXAMPLE 6 ID 1 Wiring Diagram on page B-36. Load
Software Programming configuration file EXP7ID1.USR into RTU ID 1.
8.8.2 RTU ID 2 SETUP: Example 7 requires the other DATAFLOW RTU to be wired and its
hardware configured according to Figure B13 - EXAMPLE 6 ID 2 Wiring Diagram on page
B-37. Load Software Programming configuration file EXP7ID2.USR into RTU ID 2.
NOTE: Except the configuration files, these two setups are identical to Example 6.
8.8.3 EXPLANATION: Although the RTU can operate in two different MODBUS modes, Example 7
deals with stored access only. In this mode, only the RTU connected to the MODBUS controller
is polled, eliminating the need for RF polling.
8.8.4 Examine the configuration of RTU ID 1. It is no longer in control of the process and is simply a
ODBUS device controlled by the MODBUS controller:
M
· XMIT CHECK IN is set to 0.
· SEND LIST is all 0s.
· REPEAT LIST is all 0s.
· All inputs have INITIATE XMIT set to NO.
· All outputs have USED set to NO.
Examine the configuration of RTU ID 2. It controls activation of RTU ID 1.
· XMIT CHECK IN is set to 30 seconds.
· SEND LIST is set to 1.
· REPEAT LIST is all 0s.
· All inputs have INITIATE XMIT set to YES.
· All outputs have USED set to NO.
NOTE: Examine the SCADA CONFIG screen display for RTU ID 1. All entries in the list are 0
because no RF polling is taking place.
8.8.5 Example 7 demonstrates polling by stored access, using the RTU Programming Software as
the MODBUS controller. To examine the polling method, execute the EXTERNAL BLOCK EDIT
option from the UTILITIES screen.
· Set the ID to 01 and the PAGE ADDRESS to 10. Execute the UPLOAD command.
Examine memory locations 1089 to 108E. These values are the current state of RTU
ID 2 inputs 6 to 1.
· Memory location 108F is a message counter. This value is incremented every time RTU
ID 1 receives a valid message from RTU ID 2.
Change the inputs on RTU ID 2 while continuously executing the UPLOAD command. Watch the 1089
to 108F memory locations update each time.
( B-24 )
Page 50

DATAFLOW RTU
EXAMPLE 8
8.9 EXAMPLE 8 illustrates the DATAFLOW RTU performing a MODBUS modem function.
Configuration files EXP8ID1 and EXP8ID2 allow two MODBUS devices to communicate with
each other by RF. This configuration can connect two PLCs (MODBUS protocol) to
communicate with each other over RF, as long as one PLC is a master and the other is a slave
with an ID of 3.
No set-up or wiring diagram is provided with this example.
8.9.1 These files configure one RTU to be ID 1 and the other RTU to be ID2. These two RTUs will
take MODBUS commands generated on the RS-485 link and transmit them over RF. When this
RF message is received by the other RTU, the message is sent out the RS-485 link. Because
this message traffic is in both directions, either RTU may be connected to
N O T E S
.............................................................................................................................................................
......................................................................................................................................................................................
........................................................................................................................................................................................................................
........................................................................................................................................................................................
.......................................................................................................................................................................................
......................................................................................................................................................................................
........................................................................................................................................................................................................
..................................................................................................................................................................................................
............................................................................................................................................................................................
........................................................................................................................................................................................................................
..............................................................................................................................................................................................
..........................................................................................................................................................................................
...............................................................................................................................................................................................................................
.....................................................................................................................................................................................................................................
...........................................................................................................................................................................................
...................................................................................................................................................................................................................................................
..............................................................................................................................................................................................
........................................................................................................................................................................................
........................................................................................................................................................................................................................................................
..........................................................................................................................................................................................
.....................................................................................................................................................................................................................
.........................................................................................................................................................................................
.........................................................................................................................................................................................
..........................................................................................................................................................................................................
.............................................................................................................................................................................................................................................................................................................
.............................................................................................................................................................................................................................................
....................................................................................................................................................................................................................................................
............................................................................................................................................................................................................................................................................................................................................................................................
.......................................................................................................................................................................................
......................................................................................................................................................................................
...................................................................................................................................................................................................................
..............................................................................................................................................................................................
...........................................................................................................................................................................................
( B-25 )
Page 51

Software/ Programming
RITRON, INC.
Figure B1 - EXAMPLE 1 RTU ID 1 Wiring Diagram
( B-26 )
Page 52

DATAFLOW RTU
Figure B2 - EXAMPLE 1 RTU ID 2 Wiring Diagram
( B-27 )
RITRON, INC.
Page 53

Software/ Programming
RITRON, INC.
Figure B3 - EXAMPLE 2 RTU ID 1 Wiring Diagram
( B-28 )
Page 54

DATAFLOW RTU
Figure B4 - EXAMPLE 2 RTU ID 2 Wiring Diagram
( B-29 )
RITRON, INC.
Page 55

Software/ Programming
RITRON, INC.
Figure B5 - EXAMPLE 2 RTU ID 3 Wiring Diagram
( B-30 )
Page 56

DATAFLOW RTU
Figure B6 - EXAMPLE 4 RTU ID 1 Wiring Diagram
( B-31 )
RITRON, INC.
Page 57

Software/ Programming
RITRON, INC.
Figure B7 - EXAMPLE 4 RTU ID 2 Wiring Diagram
( B-32 )
Page 58

DATAFLOW RTU
Figure B8 - EXAMPLE 5 RTU ID 1 Wiring Diagram
( B-33 )
RITRON, INC.
Page 59

Software/ Programming
RITRON, INC.
Figure B9 - EXAMPLE 5 RTU ID 2 Wiring Diagram
( B-34 )
Page 60

DATAFLOW RTU
Figure B10 - EXAMPLE 5 RTU ID 3 Wiring Diagram
( B-35 )
RITRON, INC.
Page 61

Software/ Programming
RITRON, INC.
Figure B11 - EXAMPLE 6 RTU ID 1 Wiring Diagram
( B-36 )
Page 62

DATAFLOW RTU
Figure B12 - EXAMPLE 6 RTU ID 2 Wiring Diagram
( B-37 )
RITRON, INC.
Page 63

Where Do I Find Everything I Need for
Process Measurement and Control?
OMEGAOf Course!
TEMPERATURE
Thermocouple, RTD & Thermistor Probes, Connectors, Panels & Assemblies
Wire: Thermocouple, RTD & Thermistor
Calibrators & Ice Point References
Recorders, Controllers & Process Monitors
Infrared Pyrometers
PRESSURE, STRAIN AND FORCE
Transducers & Strain Gauges
Load Cells & Pressure Gauges
Displacement Transducers
Instrumentation & Accessories
FLOW/LEVEL
Rotameters, Gas Mass Flowmeters & Flow Computers
Air Velocity Indicators
Turbine/Paddlewheel Systems
Totalizers & Batch Controllers
pH/CONDUCTIVITY
pH Electrodes, Testers & Accessories
Benchtop/Laboratory Meters
Controllers, Calibrators, Simulators & Pumps
Industrial pH & Conductivity Equipment
DATA ACQUISITION
Data Acquisition & Engineering Software
Communications-Based Acquisition Systems
Plug-in Cards for Apple, IBM & Compatibles
Datalogging Systems
Recorders, Printers & Plotters
HEATERS
Heating Cable
Cartridge & Strip Heaters
Immersion & Band Heaters
Flexible Heaters
Laboratory Heaters
ENVIRONMENTAL
MONITORING AND CONTROL
Metering & Control Instrumentation
Refractometers
Pumps & Tubing
Air, Soil & Water Monitors
Industrial Water & Wastewater Treatment
pH, Conductivity & Dissolved Oxygen Instruments
M3389/0702
 Loading...
Loading...