

Page 1

www.omega.com
e-mail: info@omega.com
User’s Guide
OME-PIO-D56/D24
PCI-Bus
Digital I/O Board
Hardware Manual
Shop online at
Page 2
Servicing North America:
USA: One Omega Drive, P.O. Box 4047
ISO 9001 Certified Stamford CT 06907-0047
TEL: (203) 359-1660 FAX: (203) 359-7700
e-mail: info@omega.com
Canada: 976 Bergar
Laval (Quebec) H7L 5A1, Canada
TEL: (514) 856-6928 FAX: (514) 856-6886
e-mail: info@omega.ca
For immediate technical or application assistance:
USA and Canada: Sales Service: 1-800-826-6342 / 1-800-TC-OMEGA
®
Customer Service: 1-800-622-2378 / 1-800-622-BEST
®
Engineering Service: 1-800-872-9436 / 1-800-USA-WHEN
®
TELEX: 996404 EASYLINK: 62968934 CABLE: OMEGA
Mexico: En Espan˜ ol: (001) 203-359-7803 e-mail: espanol@omega.com
FAX: (001) 203-359-7807 info@omega.com.mx
Servicing Europe:
Benelux: Postbus 8034, 1180 LA Amstelveen, The Netherlands
TEL: +31 (0)20 3472121 FAX: +31 (0)20 6434643
Toll Free in Benelux: 0800 0993344
e-mail: sales@omegaeng.nl
Czech Republic: Frystatska 184, 733 01 Karviná, Czech Republic
TEL: +420 (0)59 6311899 FAX: +420 (0)59 6311114
Toll Free: 0800-1-66342 e-mail: info@omegashop.cz
France: 11, rue Jacques Cartier, 78280 Guyancourt, France
TEL: +33 (0)1 61 37 29 00 FAX: +33 (0)1 30 57 54 27
Toll Free in France: 0800 466 342
e-mail: sales@omega.fr
Germany/Austria: Daimlerstrasse 26, D-75392 Deckenpfronn, Germany
TEL: +49 (0)7056 9398-0 FAX: +49 (0)7056 9398-29
Toll Free in Germany: 0800 639 7678
e-mail: info@omega.de
United Kingdom: One Omega Drive, River Bend Technology Centre
ISO 9002 Certified Northbank, Irlam, Manchester
M44 5BD United Kingdom
TEL: +44 (0)161 777 6611 FAX: +44 (0)161 777 6622
Toll Free in United Kingdom: 0800-488-488
e-mail: sales@omega.co.uk
OMEGAnet®Online Service Internet e-mail
www.omega.com info@omega.com
It is the policy of OMEGA to comply with all worldwide safety and EMC/EMI regulations that
apply. OMEGA is constantly pursuing certification of its products to the European New Approach
Directives. OMEGA will add the CE mark to every appropriate device upon certification.
The information contained in this document is believed to be correct, but OMEGA Engineering, Inc. accepts
no liability for any errors it contains, and reserves the right to alter specifications without notice.
WARNING: These products are not designed for use in, and should not be used for, patient-connected applications.
Page 3
OME-PIO-D56/D24
User Manual
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 1
Page 4

Table of Contents
1. INTRODUCTION...........................................................................................................................3
1.1 FEATURES .................................................................................................................................... 3
1.2 SPECIFICATIONS ...........................................................................................................................4
1.3 ORDER DESCRIPTION....................................................................................................................4
1.4 PCI DATA ACQUISITION FAMILY ................................................................................................. 5
1.5 PRODUCT CHECKLIST ...................................................................................................................5
2. HARDWARE CONFIGURATION...............................................................................................6
2.1 BOARD LAYOUT ........................................................................................................................... 6
2.2 I/O PORT LOCATION.....................................................................................................................7
2.3 ENABLING I/O OPERATION...........................................................................................................7
2.4 INTERRUPT OPERATION ..............................................................................................................11
2.5 DAUGHTER BOARDS................................................................................................................... 18
2.6 PIN ASSIGNMENT........................................................................................................................24
3. I/O CONTROL REGISTER ........................................................................................................26
3.1 HOW TO FIND THE I/O ADDRESS ................................................................................................26
3.2 THE ASSIGNMENT OF I/O ADDRESS.............................................................................................32
3.3 THE I/O ADDRESS MAP .............................................................................................................. 33
4. DEMO PROGRAM ......................................................................................................................38
4.1 PIO_PISO..................................................................................................................................39
4.2 DEMO1 .....................................................................................................................................41
4.3 DEMO2 .....................................................................................................................................42
4.4 DEMO3 .....................................................................................................................................43
4.5 DEMO4 .....................................................................................................................................45
4.6 DEMO5 .....................................................................................................................................47
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 2
Page 5
1. Introduction
The OME-PIO-D56/OME-OME-PIO-D24 provides 56/24 TTL digital I/O lines.
The OME-PIO-D56/OME-OME-PIO-D24 consists of one 24-bit bi-directional port,
one 16-bit input port and one 16-bit output port (only for OME-PIO-D56). The 24-bit
port supports three 8-bit groups PA, PB & PC. Each 8-bit group can be individually
configured to function as either an input or an output. All groups using 24-bit bi-
directional ports are configured as inputs upon power-up or reset.
Use the OME-DB-24PD to connect the input port for either isolation purposes,
or to interface to the output port for relay control. The OME-PIO-D56/OME-PIO-D24
has one D-sub connector and two 20-pin flat-cable connectors (only for OME-PIO-
D56). The flat cable can be connected to an OME-ADP-20/PCI adapter. The adapter
can be fixed on the chassis. It can be installed in a 5V PCI bus and supports “Plug &
Play”.
1.1 Features
• PCI bus
• Up to 56/24(OME-PIO-D56/OME-PIO-D24) channels of digital I/O
• All I/O lines buffered on the board
• Eight-bit groups independently selectable for I/O on 24-bit port
• Input / Output programmable I/O ports under software control
• Double side SMD, short card.
• Connects directly to OME-DB-24PR, OME-DB-24PD, OME-DB-24RD,
OME-DB-24PRD, OME-DB-16P8R, OME-DB-24POR, OME-DB-24SSR or
OME-DB-24C
• 4 interrupt sources: PC0, PC1, PC2, PC3
• One DB37 connector, two 20-pin flat-cable connectors (only for OME-PIO-D56)
• High drive capability
• Automatically detected by Windows 95/98/2000/XP
• No base address or IRQ switches to set
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 3
Page 6

1.2 Specifications
• All inputs are TTL compatible
Logic high voltage : 2.4V (Min.)
Logic low voltage : 0.8V (Max.)
• All outputs are TTL compatible
OPTO-22 output (CON3)
Sink current : 64mA (Max.)
Source current : 32mA(Max.)
16-channel output (CON1)
Sink current : 8mA (Max.)
Source current : 0.4mA(Max.)
• Environmental :
Operating Temperature: 0°C to 60°C
Storage Temperature: -20°C to 80°C
Humidity: 0 to 90% non-condensing
• Dimensions: 143mm X 105mm
• Power Consumption: +5V @ 530mA/420mA(OME-PIO-D56/OME-PIO-D24)
1.3 Order Description
• OME-PIO-D56 : PCI bus 56-bit DI/O board
• OME-PIO-D24 : PCI bus 24-bit DI/O board
1.3.1 Options
• OME-DB-24PD : 24 channel isolated D/I board
• OME-DB-24RD : 24 channel relay board
• OME-DB-24PRD : 24 channel power relay board
• OME-DB-16P8R : 16 channel isolated D/I and 8 channels relay output board
• OME-DB-24POR : 24 channel Photo MOS output board
• OME-DB-24C : 24 channel open-collector output board
• OME-ADP-20/PCI : extender, 20-pin header to 20-pin header for PCI bus I/O
boards
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 4
Page 7
1.4 PCI Data Acquisition Family
We provide a family of PCI bus data acquisition cards. These cards can be
divided into three groups as follows:
1. OME-PCI-series: first generation, isolated or non-isolated cards
OME-PCI-1002/1202/1800/1802/1602: multi-function family, non-isolated
OME-PCI-P16R16/P16C16/P16POR16/P8R8: D/I/O family, isolated
OME-PCI-TMC12: timer/counter card, non-isolated
2. OME-PIO-series: cost-effective generation, non-isolated cards
OME-PIO-823/821: multi-function family
OME-PIO-D144/D96/D64/D56/D48/D24: D/I/O family
OME-PIO-DA16/DA8/DA4: D/A family
3. OME-PISO-series: cost-effective generation, isolated cards
OME-PISO-813: A/D card
OME-PISO-P32C32/P64/C64: D/I/O family
OME-PISO-P8R8/P8SSR8AC/P8SSR8DC: D/I/O family
OME-PISO-730: D/I/O card
OME-PISO-DA2: D/A card
1.5 Product Checklist
In addition to this manual, the package includes the following items:
• One OME-PIO-D56(or OME-PIO-D24) card
• One software floppy diskette or CD
• One release note
Please read the release note first. Important information that could be given in release
note such as:
1. Where you can find the software driver & utility?
2. How to install software & utility?
3. The location of the diagnostic program?
4. FAQ
Attention!
If any one of these items is missing or damaged, please contact
Omega Engineering immediately. Save the shipping materials
and carton in case you want to ship or store the product in the
future.
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 5
Page 8
2. Hardware configuration
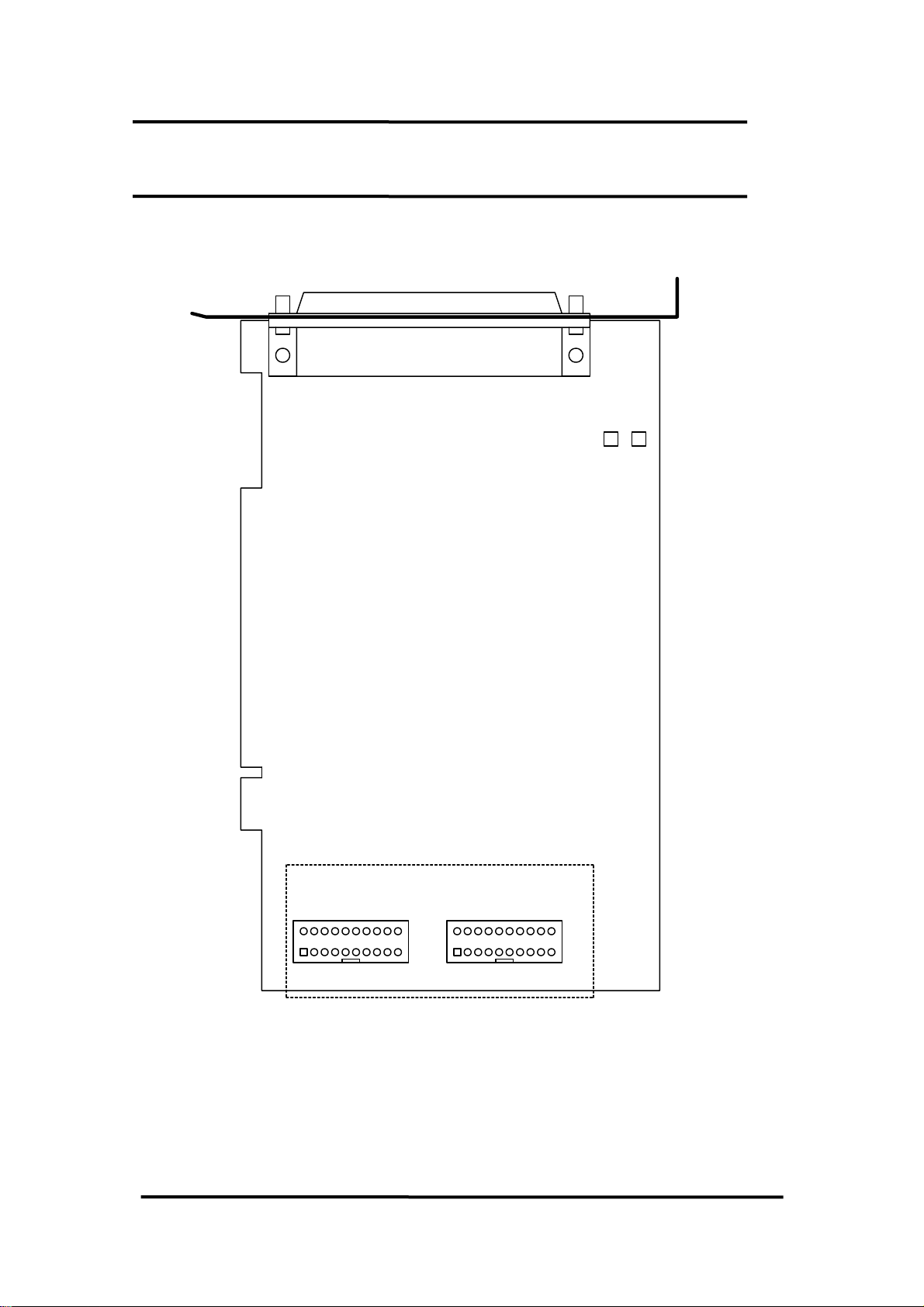
2.1 Board Layout
CON3
DI/O
Port0
Port1
Port2
PIO-D24
PIO-D56
PCI BUS
only for PIO-D56
D/O
CON1
12
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 6
1920
D/I
CON2
12
1920
Page 9
2.2 I/O Port Location
The OME-PIO-D56/OME-PIO-D24 consists of one 24-bit bi-directional port, one
16 bit input port and one 16 bit output port (only for OME-PIO-D56). The 24-bit port
supports three 8-bit groups: PA, PB & PC. Each 8-bit group can be individually
configured to function as either inputs or outputs. All groups using 24-bit bi-
directional ports are configured as inputs upon power-up or reset. The I/O port
locations are as follows:
Connector of
OME-PIO-D56/D24
CON3 (DI/O) Port0 Port1 Port2
Connector of OME-PIO-D56 Description
CON1 D/O
CON2 D/I
Refer to Sec. 2.1 for board layout & I/O port location.
Note: PC0, PC1, PC2 and PC3 can be used as interrupt signal source. Refer to Sec.
2.4 for more information.
PA0 ~ PA7 PB0 ~ PB7 PC0 ~ PC7
2.3 Enabling I/O Operation
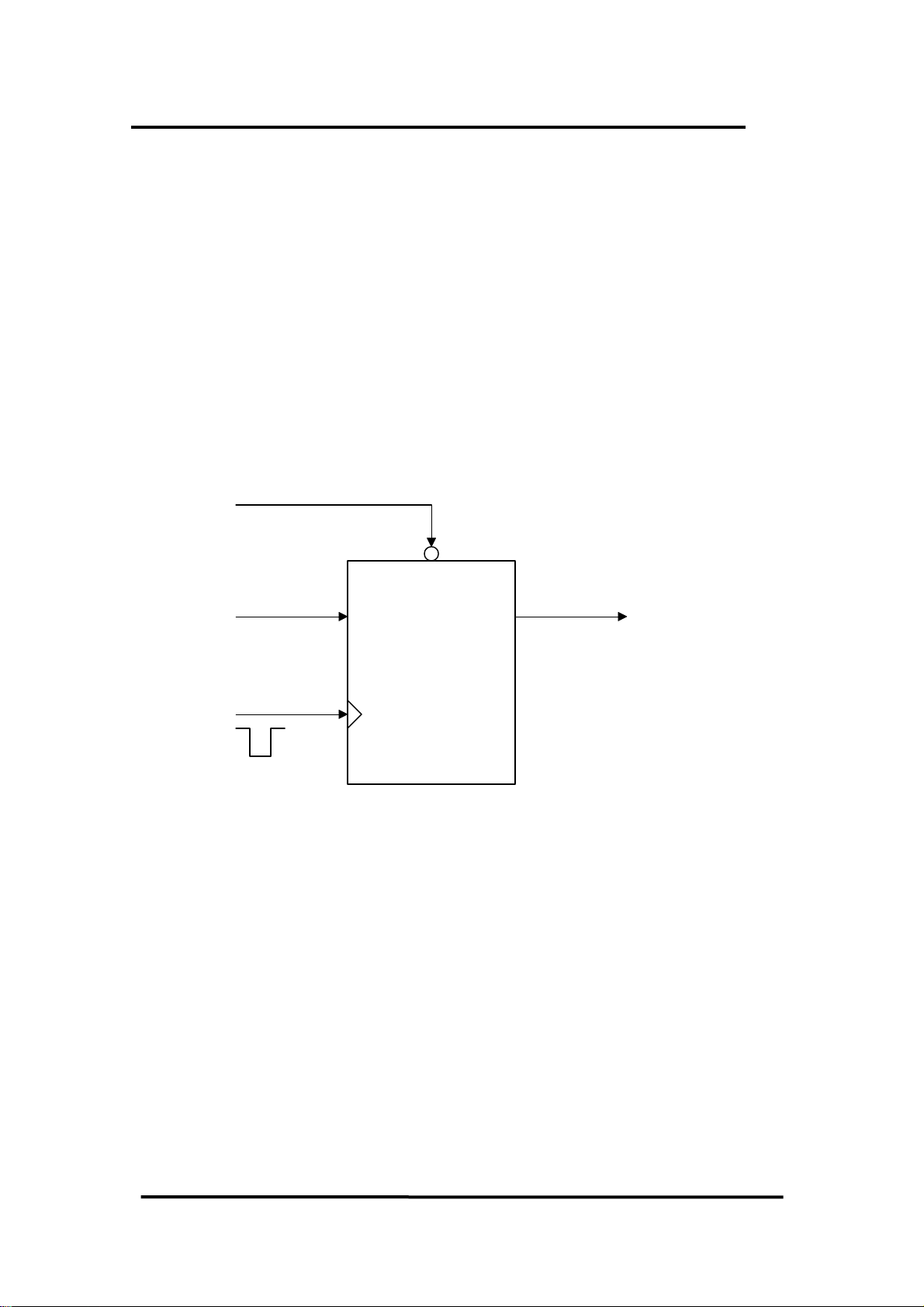
2.3.1 DI/DO Port Architecture (CON3)
Upon power-up, all D/I/O port (CON3) operations are disabled. The RESET\
signal controls the enable/disable state of D/I/O port. Refer to Sec. 3.3.1 for more
information about RESET\ signal. The power-up states are as follows:
• All D/I/O operations are disabled
• All three D/I/O ports are configured as D/I port
• All D/O latch register are undefined.(refer to Sec. 2.3.2)
Initialization must be performed before using these D/I/Os. The recommended
steps are as follows:
Step 1: Find address-mapping of OME-PIO/PISO cards (refer to Sec. 3.1)
Step 2: Enable all D/I/O operations (refer to Sec. 3.3.1)
Step 3: Configure the three ports (in CON3) to their expected D/I/O state &
send the initial value to all D/O ports (refer to Sec. 3.3.8)
Refer to DEMO1.C for demo program.
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 7
Page 10
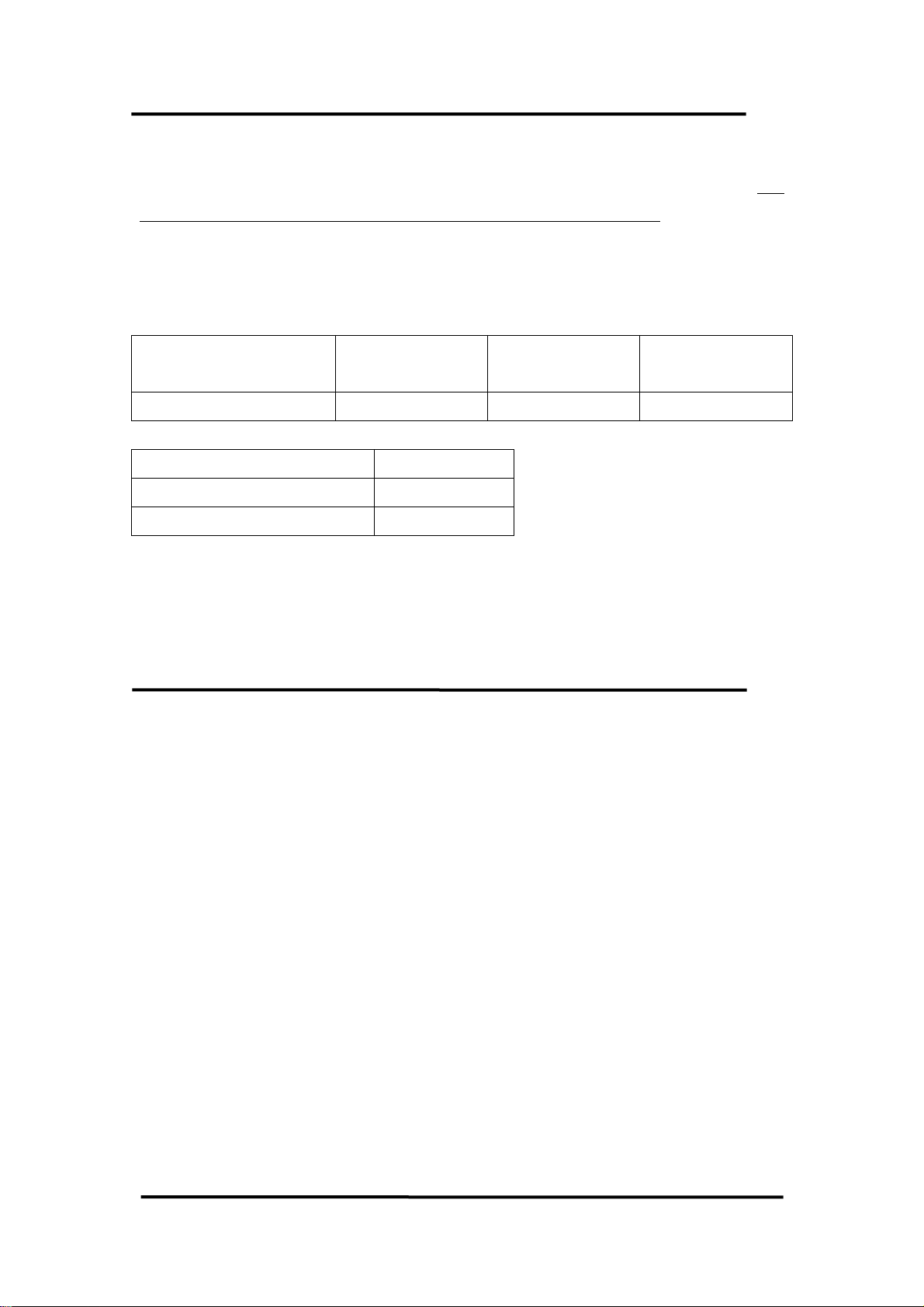
I/O select (Sec. 3.3.7)
RESET\ (Sec. 3.3.1)
Data
(Sec. 3.3.8)
Data
(Sec. 3.3.8)
disable\
input Latch
Clock input
D/O latch CKT
disable
Buffer input
Clock input
D/I buffer CKT
D/I/O
• When the RESET\ is in Low-state Æ all D/I/O operations are disabled
• When the RESET\ is in High-state Æ all D/I/O operation are enabled.
• If D/I/O is configured as D/I port Æ D/I= external input signal
• If D/I/O is configured as D/O port Æ D/I = read back of D/O
• If D/I/O is configured as D/I port Æ send to D/O will change the D/O latch
register only. The D/I & external input signals will not change.
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 8
Page 11
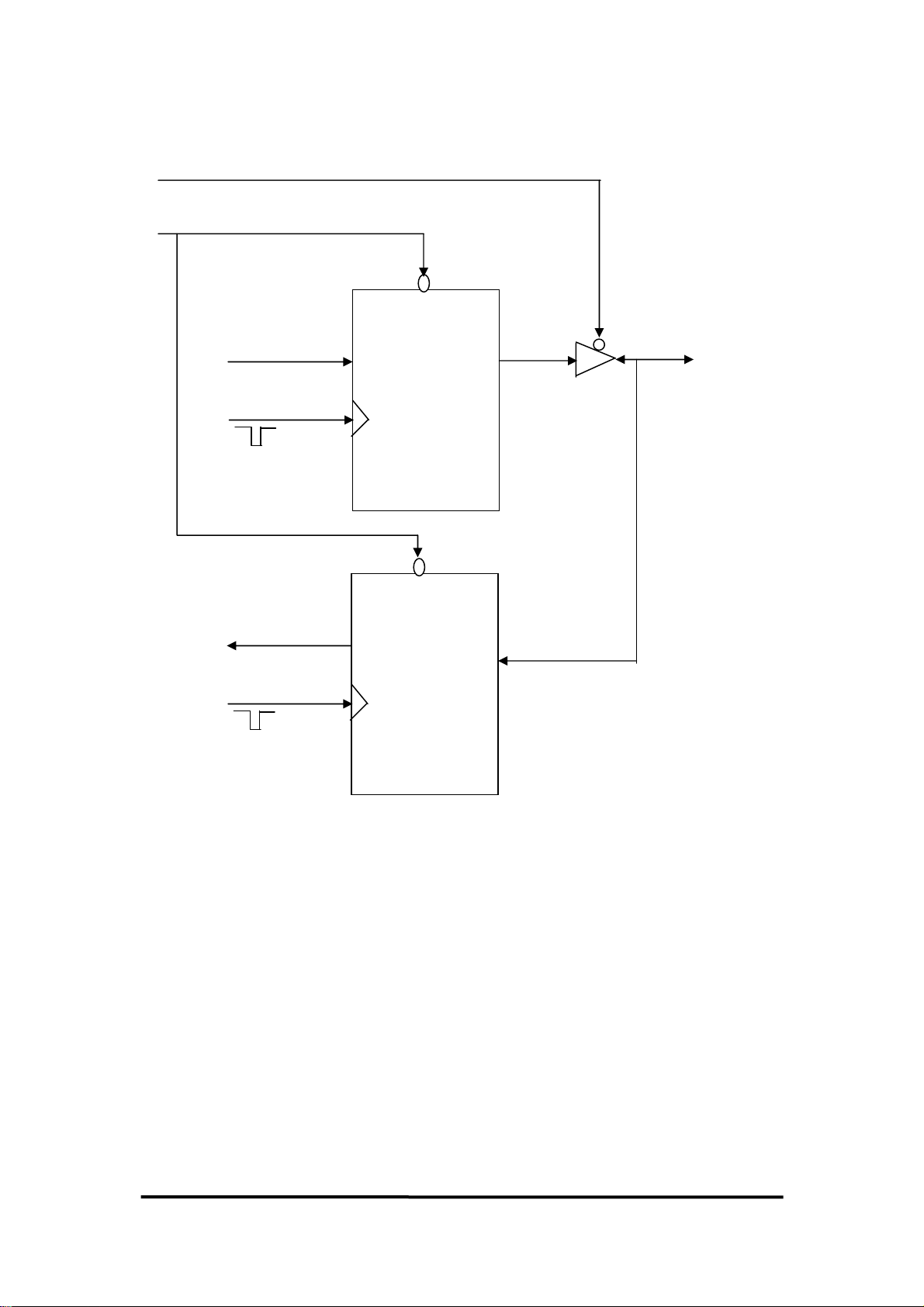
2.3.2 DI Port Architecture (CON2)
When the PC is powered up, all DI (CON2) port operations are disabled. The
RESET\ signal controls the enable/disable signal for the DI port. Refer to Sec. 3.3.1
for more information about the RESET\ signal.
• The RESET\ is in Low-state Æ all DI operations are disabled
• The RESET\ is in High-state Æ all DI operations are enabled
RESET\
disable
Data
Buffer input
Clock input
CON2
D/I buffer CKT
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 9
Page 12
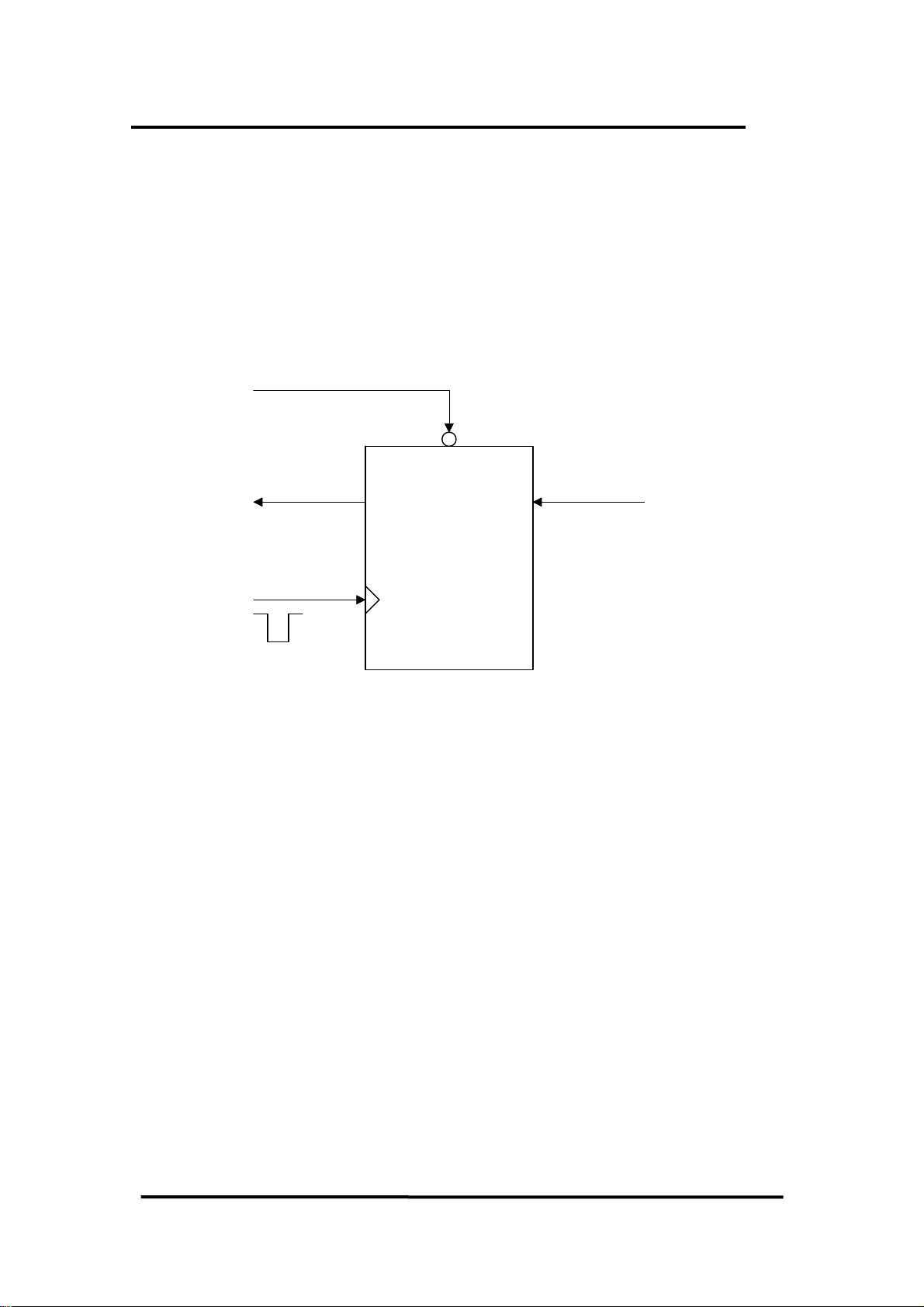
2.3.3 DO Port Architecture (CON1)
When the PC is powered up, all DO port (CON1) operations are disabled. The
RESET\ signal controls the enable/disable signal for the DI port. Refer to Sec. 3.3.1
for more information about the RESET\ signal.
• The RESET\ is in Low-state Æ all DO operations are disabled
• The RESET\ is in High-state Æ all DO operations are enabled
The power-up states are as follows:
• All DO operations are disabled
• All output latches are cleared to Low-Level
RESET\
clear
Data
input Latch
CON1
Clock input
D/O buffer CKT
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 10
Page 13

2.4 Interrupt Operation
All PC0, PC1, PC2 and PC3 can be used as an interrupt signal sources. Refer to
Sec. 2.1 for PC0/PC1/PC2/PC3 location. The interrupt of OME-PIO-D56/OME-
PIO-D24 is level-trigger & Active_High. The interrupt signal can be programmed to
inverted or non-inverted state. The programming procedure is given as follows:
1. Make sure the initial level is High or Low
2. If the initial state is High Æ select the inverted signal (Sec. 3.3.6)
3. If the initial state is Low Æ select the
4. Enable the INT function (Sec. 3.3.4)
5. If the interrupt signal is active Æ program will transfer into the interrupt
service routine Æ if INT signal is High now Æ select the inverted input
Æ if INT signal is Low now Æ select the non-inverted input
Refer to DEMO3.C & DEMO4.C for single interrupt source. Refer to
DEMO5.C for four interrupt sources.
If only one interrupt signal source is used, the interrupt service routine does not
have to identify the interrupt source. (Refer to DEMO3.C & DEMO4.C)
If there is more than one interrupt source, the interrupt service routine has to
identify the active signals via the following steps: (Refer to DEMO5.C)
1. Reads the new status of the interrupt signal source
2. Compares the new status with the old status to identify the active signals
3. If PC0 is active, service PC0 & non-inverter/inverted the PC0 signal
4. If PC1 is active, service PC1 & non-inverted/inverted the PC1 signal
non-inverted signal (Sec. 3.3.6)
5. If PC2 is active, service PC2 & non-inverted/inverted the PC2 signal
6. If PC3 is active, service PC3 & non-inverted/inverted the PC3 signal
7. Saves the new status to old status
Note: If the interrupt signal is too short, the new status may be the same as old
status. So the interrupt signal must be held active until the interrupt service
routine is executed. This hold time is different for different operating systems. It
can be as a short as micro-second or as a long as second. In general, 20ms is
enough for most operating systems.
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 11
Page 14
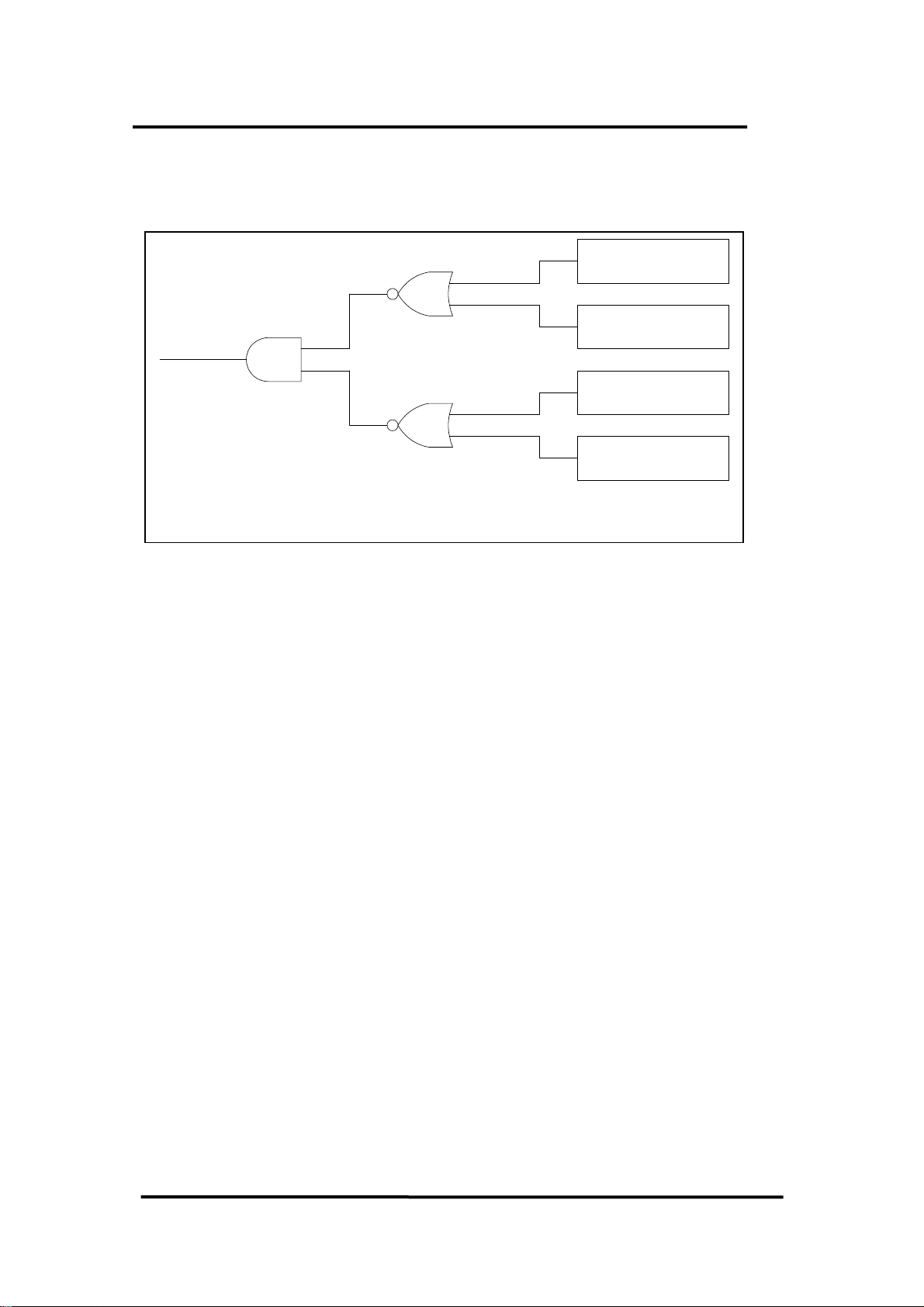
2.4.1 Interrupt Block Diagram of OME-PIO-
D56/D24
INT_CHAN_0
INT\
Level_trigger
The interrupt output signal of OME-PIO-D56/OME-PIO-D24, INT\ is
Level_trigger & Active_Low. If the INT\ generates a low pulse, the OME-PIO-
D56/OME-PIO-D24 will interrupt the PC only once. If the INT\ is fixed in low level,
the OME-PIO-D56/OME-PIO-D24 will interrupt the PC continuously.
INT_CHAN_0/1/2/3 must be controlled in a pulse type signals. It must be fixed in
low level state normally and generate a high pulse to interrupt the PC.
The priority of INT_CHAN_0/1/2/3 is the same. If all these four signals are active
at the same time, then INT\ will be active only one time. So the interrupt service
INT_CHAN_1
INT_CHAN_2
INT_CHAN_3
initial_low
active_high
routine has to read the status of all interrupt channels for a multi-channel interrupt.
Refer to Sec. 2.4 for mare information.
DEMO5.C → for multi-channel interrupt source
If only one interrupt source is used, the interrupt service routine does not have to read
the status of interrupt source. The demo programs DEMO3.C and DEMO4.C are
designed for single-channel interrupt demo, as follows:
DEMO3.C → for INT_CHAN_0 only (PC0 initial low)
DEMO4.C → for INT_CHAN_0 only (PC0 initial high)
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 12
Page 15
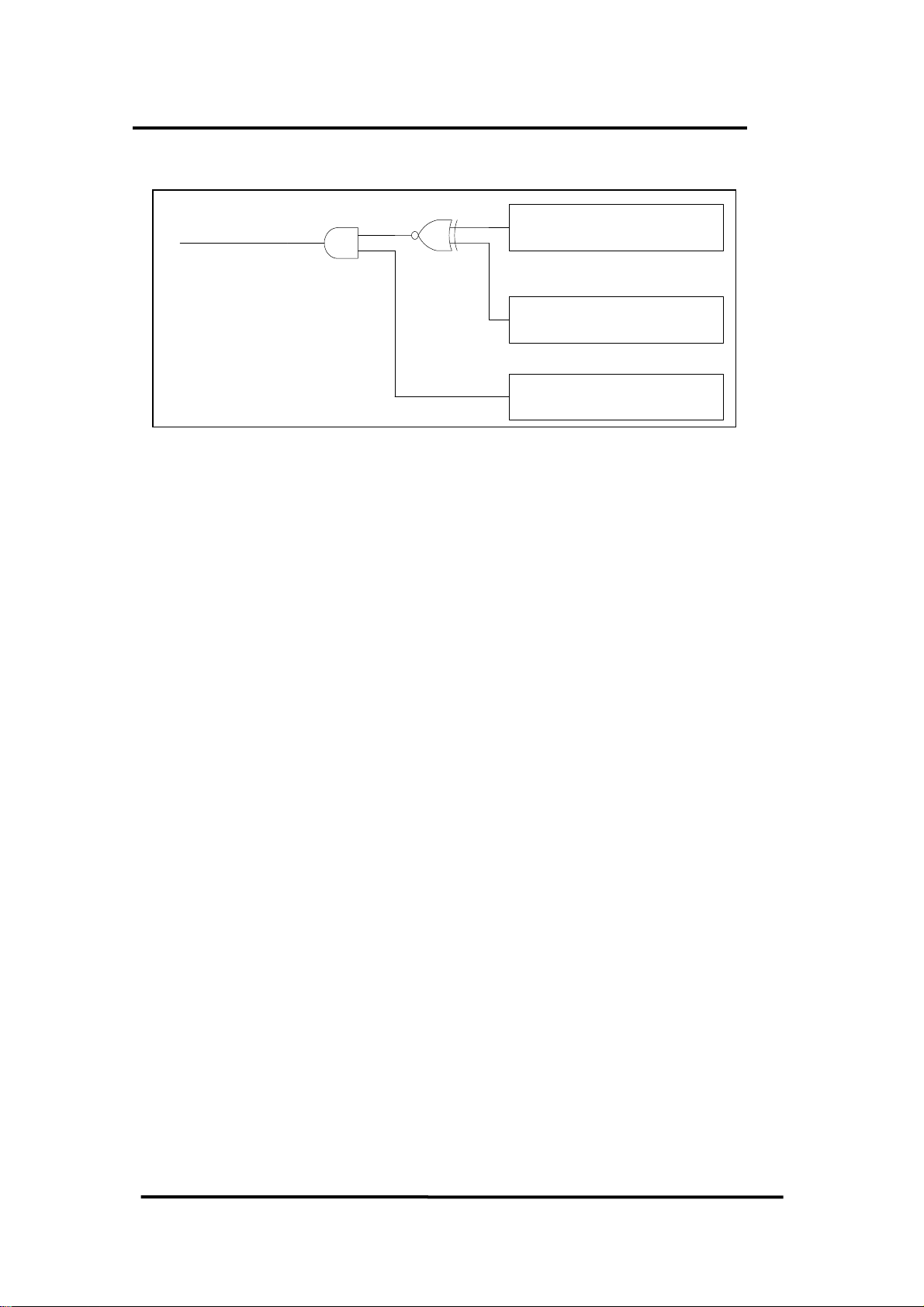
2.4.2 INT_CHAN_0/1/2/3
INT_CHAN_0 (1/2/3)
PC0(PC1/PC2/PC3)
Inverted/Noninverted select
INV0(1/2/3)
Enable/Disable select
EN0(1/2/3)
The INT_CHAN_0 must normally be fixed in low level state and generate a
high pulse to interrupt the PC.
The EN0 (EN1/EN2/EN3) can be used to enable/disable the INT_CHAN_0(1/2/3)
as follows : (Refer to Sec. 3.3.4)
EN0 (1/2/3) = 0 → INT_CHAN_0(1/2/3) = disable
EN0 (1/2/3) = 1 → INT_CHAN_0(1/2/3) = enable
The INV0 can be used to invert/non-invert the PC0 (1/2/3) as follows: (Refer to
Sec.3.3.6)
INV0 (1/2/3) = 0 → INT_CHAN_0(1/2/3) = inverted state of PC0 (1/2/3)
INV0 (1/2/3) = 1 → INT_CHAN_0(1/2/3) = non-inverted state of PC0 (1/2/3)
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 13
Page 16
2.4.3 Initial_high, active_low Interrupt source
If the PC0 is a initial_high, active_low signal, the interrupt service routine
should use INV0 to invert/non-invert the PC0 for high_pulse generation as follows:
(Refer to DEMO4.C)
Initial setting:
now_int_state=1; /* initial state for PC0 */
outportb(wBase+0x2a,0); /* select the inverted PC0 */
void interrupt irq_service()
{
if (now_int_state==1) /* now PC0 is changed to LOW */(a)
{ /* --> INT_CHAN_0=!PC0=HIGH now */
COUNT_L++; /* find a LOW_pulse (PC0) */
If((inport(wBase+7)&1)==0)/* the PC0 is still fixed in LOW */
{ /* Æ need to generate a high_pulse */
outportb(wBase+0x2a,1);/* INV0 select the non-inverted input */(b)
/* INT_CHAN_0=PC0=LOW --> */
/* INT_CHAN_0 generate a high_pulse */
now_int_state=0; /* now PC0=LOW */
}
else now_int_state=1; /* now PC0=HIGH */
/* don’t have to generate high_pulse */
}
else /* now PC0 is changed to HIGH */(c)
{ /* --> INT_CHAN_0=PC0=HIGH now */
COUNT_H++; /* find a HIGH_pulse (PC0) */
If((inport(wBase+7)&1)==1)/* the PC0 is still fixed in HIGH */
{ /* need to generate a high_pulse */
outportb(wBase+0x2a,0);/* INV0 select the inverted input */(d)
/* INT_CHAN_0=!PC0=LOW --> */
/* INT_CHAN_0 generate a high_pulse */
now_int_state=1; /* now PC0=HIGH */
}
else now_int_state=0; /* now PC0=LOW */
/* don’t have to generate high_pulse */
}
if (wIrq>=8) outportb(A2_8259,0x20);
outportb(A1_8259,0x20);
}
PC0
(a) (b) (c) (d)
INV0
INT_CHAN_0
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 14
Page 17

2.4.4 Initial_low, active_high Interrupt source
If the PC0 is a initial_low, active_high signal, the interrupt service routine
should use INV0 to inverted/non-inverted the PC0 for high_pulse generation as
follows: (Refer to DEMO3.C)
Initial setting:
now_int_state=0; /* initial state for PC0 */
outportb(wBase+0x2a,1); /* select the non-inverted PC0 */
void interrupt irq_service()
{
if (now_int_state==1) /* now PC0 is changed to LOW */(c)
{ /* --> INT_CHAN_0=!PC0=HIGH now */
COUNT_L++; /* find a LOW_pulse (PC0) */
If((inport(wBase+7)&1)==0)/* the PC0 is still fixed in LOW */
{ /* Æ need to generate a high_pulse */
outportb(wBase+0x2a,1);/* INV0 select the non-inverted input */(d)
/* INT_CHAN_0=PC0=LOW --> */
/* INT_CHAN_0 generate a high_pulse */
now_int_state=0; /* now PC0=LOW */
}
else now_int_state=1; /* now PC0=HIGH */
/* don’t have to generate high_pulse */
}
else /* now PC0 is changed to HIGH */(a)
{ /* --> INT_CHAN_0=PC0=HIGH now */
COUNT_H++; /* find a High_pulse (PC0) */
If((inport(wBase+7)&1)==1)/* the PC0 is still fixed in HIGH */
{ /* need to generate a high_pulse */
outportb(wBase+0x2a,0);/* INV0 select the inverted input */(b)
/* INT_CHAN_0=!PC0=LOW --> */
/* INT_CHAN_0 generate a high_pulse */
now_int_state=1; /* now PC0=HIGH */
}
else now_int_state=0; /* now PC0=LOW */
/* don’t have to generate high_pulse */
}
if (wIrq>=8) outportb(A2_8259,0x20);
outportb(A1_8259,0x20);
}
PC0
(a) (b) (c) (d)
INV0
INT_CHAN_0
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 15
Page 18

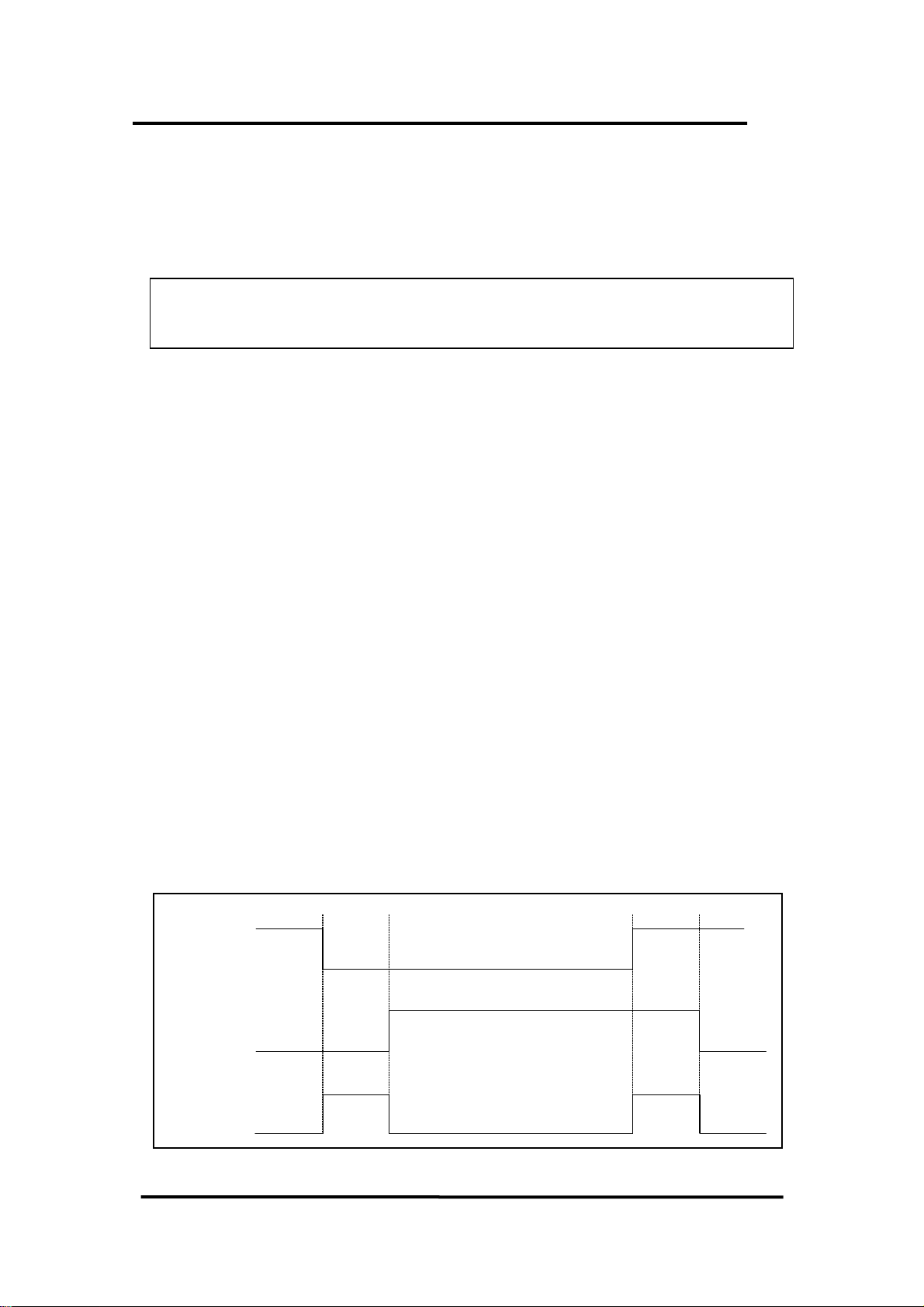
2.4.5 Muliti-Interrupt Source
Assume: PC0 is initial Low, active High,
PC1 is initial High, active Low
PC2 is initial Low, active High
PC3 is initial High, active Low
as follows :
PC0
PC1
PC2
PC3
PC0 & PC1 are
active at the same
time.
PC2 & PC3 are
active at the same
time.
Refer to DEMO5.C for source program. All these four falling-edge & rising-edge
can be detected by DEMO5.C.
PC0 & PC1 are
return to normal
at the same time.
PC2 & PC3 are
return to normal at
the same time.
Note: When the interrupt is active, the user program has to identify the active
signals. These signals may be active at the same time. The interrupt service
routine has to service all active signals at the same time.
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 16
Page 19

void interrupt irq_service()
{
new_int_state=inportb(wBase+7)&0x0f; /* read all interrupt state */
int_c=new_int_state^now_int_state; /* compare which interrupt */
/* signal be change */
if ((int_c&0x1)!=0) /* INT_CHAN_0 is active */
{
if ((new_int_state&0x01)!=0) /* now PC0 change to high */
{
CNT_H1++;
}
else /* now PC0 change to low */
{
CNT_L1++;
}
invert=invert^1; /* to generate a high pulse */
}
if ((int_c&0x2)!=0)
{
if ((new_int_state&0x02)!=0) /* now PC1 change to high */
{
CNT_H2++;
}
else /* now PC1 change to low */
{
CNT_L2++;
{
invert=invert^2; /* to generate a high pulse */
}
if ((int_c&0x4)!=0)
{
If ((new_int_state&0x04)!=0) /* now PC2 change to high */
{
CNT_H3++;
}
else /* now PC2 change to low */
{
CNT_L3++;
}
invert=invert^4; /* to generate a high pulse */
}
if ((int_c&0x8)!=0)
{
if ((new_int_state&0x08)!=0) /* now PC3 change to high */
{
CNT_H4++;
{
else /* now PC3 change to low */
{
CNT_L4++;
}
invert=invert^8; /* to generate a high pulse */
}
now_int_state=new_int_state;
outportb(wBase+0x2a,invert);
if (wIrq>=8) outportb(A2_8259,0x20);
outportb(A1_8259,0x20);
}
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 17
Page 20

2.5 Daughter Boards
2.5.1 OME-DB-37
The OME-DB-37 is a general purpose daughter board for D-sub 37 pins,
designed for an easy-wiring connection.
2.5.2 OME-DN-37
The OME-DN-37 is a general purpose daughter board for OME-DB-37 with DIN-
Rail Mounting. It is designed for easy-wiring connection..
37pin cable
OME-DN-37
2.5.3 OME-DB-8125
The OME-DB-8125 is a general purpose screw terminal board. It is designed for
easy wire connection. There is one D-Sub37 & two 20-pin flat-cable headers on the
OME-DB-8125.
37pin cable
OME-DB-8125
(D-Sub 37 or
20-pin flat-cable header)
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 18
Page 21

2.5.4 OME-ADP-20/PCI
The OME-ADP-20/PCI is an extender for 20-pin header. One side of OME-
ADP-20/PCI connects to a 20-pin header. The other side mounts on the PC chassis as
follows:
NOTE: Please choose the suitable extender for your application
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 19
Page 22

2.5.5 OME-DB-24PD Isolated Input Board
The OME-DB-24PD is a 24 channel isolated digital input daughter board. The
optically isolated inputs of the OME-DB-24PD consist of a bi-directional opto-
coupler with a resistor for current sensing. Use the OME-DB-24PD to sense DC
signals from TTL levels up to 24V or use the OME-DB-24PD to sense a wide range
of AC signals. Use this board to isolate the computer from large common-mode
voltages, ground loops and transient voltage spikes that often occur in industrial
environments.
OME-PIO-D56/D24
Opto-Isolated
OME-PIO-D56/D24
OME-DB-24PD
AC or DC Signal
0V to 24V
+
-
OME-DB-24PD
50-pin flat-cable header Yes
D-sub 37-pin header Yes
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 20
Page 23

2.5.6 OME-DB-24RD Relay Board
The OME-DB-24RD, a 24 channel relay output board, consists of 24 form C
relays for efficient, programmable load switching. The relays are energized by
applying a 12V/24V signal to the appropriate relay channel on the 50-pin flat
connector. There are 24 enunciator LEDs for each relay which light when their
associated relay is activated.
Form C Relay
Normal Open
Normal Close
Com
OME-PIO-
OME-DB-24RD
D56/PIO-D24
Note:
Channel : 24 Form C Relay
Relay: Switch up to 0.5A at 110ACV
or 1A at 24DCV
OME-DB-24RD
50-pin flat-cable header Yes
D-sub 37-pin header Yes
OME-DB-24R, OME-DB-24RD 24*Relay (120V, 0.5A)
OME-DB-24PR,OME-DB-24PRD 24* Power Relay (250V, 5A)
OME-DB-24POR 24*photo MOS Relay (350V, 01.A)
OME-DB-24SSR 24*SSR (250VAC, 4A)
OME-DB-24C 24*O.C. (30V, 100 mA)
OME-DB-16P8R 16*Relay (120V, 0.5A) + 8*isolated input
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 21
Page 24

2.5.7 OME-DB-24PRD, OME-DB-24POR, OME-
DB-24C
OME-DB-24PRD 24*power relay, 5A/250V
OME-DB-24POR 24*photo MOS relay, 0.1A/350VAC
OME-DB-24C 24*open collector, 100mA per channel, 30V max.
The OME-DB-24PRD, a 24-channel power relay output board, consists of 8
form C and 16 form A electromechanical relays for efficient, programmable load
control. The contact of each relay can control a 5A load at 250ACV/30VDCV. The
relay is energized by applying a 5 volt signal to the appropriate relay channel on the
20-pin flat cable connector(using only 16 relays) or 50-pin flat cable
connector(OPTO-22 compatible for DIO-24 series). Twenty four enunciator LEDs
(one for each relay) light when their associated relay is activated. To avoid
overloading your PC’s power supply, this board needs a +12VDC or +24VDC
external power supply.
OME-PIO-
D56/PIO-D24
Normal Open
Form A Relay
Com
OME-DB-24PRD
D-Sub37
50-pin header
Note:
50-Pin connector (OPTO-22 compatible), for OME-DIO-24/48/44,
OME-PIO-D144/D96/D56/D48/D24
Channel: 16 Form A Relay, 8 Form C Relay
Relay: switches up to 5A at 110ACV / 5A at 30DCV
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 22
Page 25

2.5.8 Daughter Board Comparison Table
20-pin flat-cable 50-pin flat-cable D-sub 37-pin
OME-DB-37 No No Yes
OME-DN-37 No No Yes
OME-ADP-37/PCI No Yes Yes
OME-ADP-50/PCI No Yes No
OME-DB-24P No Yes No
OME-DB-24PD No Yes Yes
OME-DB-16P8R No Yes Yes
OME-DB-24R No Yes No
OME-DB-24RD No Yes Yes
OME-DB-24C Yes Yes Yes
OME-DB-24PR Yes Yes No
OME-DB-24PRD No Yes Yes
OME-DB-24POR Yes Yes Yes
OME-DB-24SSR No Yes Yes
Note: There is no 50-pin flat cable header on OME-PIO-D56/OME-PIO-D24. The
OME-PIO-D56/OME-PIO-D24 has one D-Sub 37 connector and two 20 pin flat-cable
headers (only for OME-PIO-D56).
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 23
Page 26

2.6 Pin Assignment
CON3: 37 pin of D-type female connector.
Pin Number Description Pin Number Description
1 N.C. 20 VCC
2 N.C. 21 GND
3 P1B7 22 P2C7
4 P1B6 23 P2C6
5 P1B5 24 P2C5
6 P1B4 25 P2C4
7 P1B3 26 P2C3
8 P1B2 27 P2C2
9 P1B1 28 P2C1
10 P1B0 29 P2C0
11 GND 30 P0A7
12 N.C. 31 P0A6
13 GND 32 P0A5
14 N.C. 33 P0A4
15 GND 34 P0A3
16 N.C. 35 P0A2
17 GND 36 P0A1
18 VCC 37 P0A0
19 GND XXXXXXX This pin not available
All signals are TTL compatible.
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 24
Page 27

CON2 : 20-pin header (only for OME-PIO-D56)
Pin Number Description Pin Number Description
1 DI0 2 DI1
3 DI2 4 DI3
5 DI4 6 DI5
7 DI6 8 DI7
9 DI8 10 DI9
11 DI10 12 DI11
13 DI12 14 DI13
15 DI14 16 DI15
17 GND 18 GND
19 Vcc 20 +12V
CON1 : 20-pin header (only for OME-PIO-D56)
Pin Number Description Pin Number Description
1 DO0 2 DO1
3 DO2 4 DO3
5 DO4 6 DO5
7 DO6 8 DO7
9 DO8 10 DO9
11 DO10 12 DO11
13 DO12 14 DO13
15 DO14 16 DO15
17 GND 18 GND
19 Vcc 20 +12V
All signals are TTL compatible.
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 25
Page 28

3. I/O Control Register
OME-PIO-D24
< REV 1.0 ~ REV 5.0 > : < REV 6.0 or above > :
• Vendor ID = 0xE159 • Vendor ID = 0xE159
• Device ID = 0x0002 • Device ID = 0x0001
• Sub-vendor ID = 0x80 • Sub-vendor ID = 0xC080
• Sub-device ID = 0x01 • Sub-device ID = 0x01
• Sub-aux ID = 0x40 • Sub-aux ID = 0x40
OME-PIO-D56
< REV 1.0 ~ REV 4.0 > : < REV 5.0 or above > :
• Vendor ID = 0xE159 • Vendor ID = 0xE159
• Device ID = 0x0002 • Device ID = 0x0001
• Sub-vendor ID = 0x80 • Sub-vendor ID = 0xC080
• Sub-device ID = 0x01 • Sub-device ID = 0x01
• Sub-aux ID = 0x40 • Sub-aux ID = 0x40
3.1 How to Find the I/O Address
The plug & play BIOS will assign a proper I/O address to every OME-PIO/PISO
series card in the power-up stage. The IDs of the cards are given below:
• Vendor ID = 0xE159 (0xE159 for Rev 6.0 or above)
• Device ID = 0x0002 (0x0001 for Rev 6.0 or above)
The sub IDs of OME-PIO-D56/OME-PIO-D24 are given as follows:
• Sub-vendor ID= 0x80 (0xC080 for Rev 6.0 or above)
• Sub-device ID = 0x01
• Sub-aux ID = 0x40
We provide all the following necessary functions:
1. PIO_DriverInit(&wBoard, wSubVendor, wSubDevice, wSubAux)
2. PIO_GetConfigAddressSpace(wBoardNo,*wBase,*wIrq, *wSubVendor,
*wSubDevice, *wSubAux, *wSlotBus, *wSlotDevice)
3. Show_PIO_PISO(wSubVendor, wSubDevice, wSubAux)
All functions are defined in PIO.H. Refer to Chapter 4 for more information. The
important driver information is given as follows:
1. Resource-allocated information:
• wBase : BASE address mapping in this PC
• wIrq: IRQ channel number allocated in this PC
2. PIO/PISO identification information:
• wSubVendor: subVendor ID of this board
• wSubDevice: subDevice ID of this board
• wSubAux: subAux ID of this board
3. PC’s physical slot information:
• wSlotBus: hardware slot ID1 in this PC’s slot position
• wSlotDevice: hardware slot ID2 in this PC’s slot position
The utility program, PIO_PISO.EXE, will detect & show all OME-
PIO/PISO cards installed in this PC. Refer to Sec. 4.1 for more information.
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 26
Page 29

3.1.1 PIO_DriverInit
PIO_DriverInit(&wBoards, wSubVendor,wSubDevice,wSubAux)
• wBoards=0 to N Æ number of boards found in this PC
• wSubVendor Æ subVendor ID of board to find
• wSubDevice Æ subDevice ID of board to find
• wSubAux Æ subAux ID of board to find
This function can detect all OME-PIO/PISO series card in the system. It is
implemented based on the PCI plug & play mechanism. It will find all OME-
PIO/PISO series cards installed in this system & save all their resource information in
the library.
Sample program 1: find all OME-PIO-D56/OME-PIO-D24 in the PC
wSubVendor=0x80; wSubDevice=1; wSubAux=0x40; /* for OME-PIO-
D56/D24 */
wRetVal=PIO_DriverInit(&wBoards, wSubVendor,wSubDevice,wSubAux);
printf("Threr are %d OME-PIO-D56/OME-PIO-D24 Cards in this PC\n",wBoards);
/* step2: save resources of all OME-PIO-D56/OME-PIO-D24 cards installed in
this PC */
for (i=0; i<wBoards; i++)
{
PIO_GetConfigAddressSpace(i,&wBase,&wIrq,&wID1,&wID2,&wID3,
&wID4,&wID5);
printf("\nCard_%d: wBase=%x, wIrq=%x", i,wBase,wIrq);
wConfigSpace[i][0]=wBaseAddress; /* save all resource of this card */
wConfigSpace[i][1]=wIrq; /* save all resource of this card */
}
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 27
Page 30

Sample program 2: find all OME-PIO/PISO in this PC (refer to Sec. 4.1 for more
information)
wRetVal=PIO_DriverInit(&wBoards,0xff,0xff,0xff); /*find all PIO_PISO*/
printf("\nThrer are %d PIO_PISO Cards in this PC",wBoards);
if (wBoards==0 ) exit(0);
printf("\n-----------------------------------------------------");
for(i=0; i<wBoards; i++)
{
PIO_GetConfigAddressSpace(i,&wBase,&wIrq,&wSubVendor,
&wSubDevice,&wSubAux,&wSlotBus,&wSlotDevice);
printf("\nCard_%d:wBase=%x,wIrq=%x,subID=[%x,%x,%x],
SlotID=[%x,%x]",i,wBase,wIrq,wSubVendor,wSubDevice,
wSubAux,wSlotBus,wSlotDevice);
printf(" --> ");
ShowPioPiso(wSubVendor,wSubDevice,wSubAux);
}
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 28
Page 31

The sub-IDs of OME-PIO/PISO series card are given as following:
OME-PIO/PISO series card Description Sub_vendor Sub_device Sub_AUX
OME-PIO-D144 (Rev 4.0) 144 * D/I/O 5C80 01 00
OME-PIO-D96 (Rev 4.0) 96 * D/I/O 5880 01 10
OME-PIO-D64 (Rev 2.0) 64 * D/I/O 4080 01 20
OME-PIO-D56 (Rev 6.0) 24* D/I/O +
C080 01 40
16*D/I + 16*D/O
OME-PIO-D48 (Rev 2.0) 48*D/I/O 0080 01 30
OME-PIO-D24 (Rev 6.0) 24*D/I/O C080 01 40
OME-PIO-821 Multi-function 80 03 10
OME-PIO-DA16 (Rev 4.0) 16*D/A 4180 00 00
OME-PIO-DA8 (Rev 4.0) 8*D/A 4180 00 00
OME-PIO-DA4 (Rev 4.0) 4*D/A 4180 00 00
OME-PISO-C64 (Rev 4.0) 64 * isolated D/O
0280 00 00
(Current Sinking)
OME-PISO-A64 (Rev 3.0) 64 * isolated D/O
0280 00 50
(Current Sourcing)
OME-PISO-P64 (Rev 4.0) 64 * isolated D/I 0280 00 10
OME-PISO-P32C32
(Rev 5.0)
32 * isolated D/O
(Current Sinking)
80 08 20
+32 * isolated D/I
OME-PISO-P32A32
(Rev 3.0)
32 * isolated D/O
(Current Sourcing)
8280 00 70
+32 * isolated D/I
OME-PISO-P8R8
(Rev 2.0)
OME-PISO-P8SSR8AC
(Rev 2.0)
OME-PISO-P8SSR8DC
(Rev 2.0)
OME-PISO-730 (Rev 2.0) 16*DI + 16*D/O +
8* isolated D/I +
8 * 220V relay
8* isolated D/I +
8 * SSR /AC
8* isolated D/I +
8 * SSR /DC
4200 00 30
4200 00 30
4200 00 30
C2FF 00 40
16* isolated D/I +
16* isolated D/O
(Current Sinking)
OME-PISO-730A
(Rev 3.0)
16*DI + 16*D/O +
16* isolated D/I +
62FF 00 80
16* isolated D/O
(Current Sourcing)
OME-PISO-813 (Rev 2.0) 32 * isolated A/D 4280 02 00
OME-PISO-DA2 (Rev 5.0) 2 * isolated D/A 4280 03 00
Note: If your board is a different version, it may also have different sub IDs. We
offer the same function calls irrespective of the board version.
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 29
Page 32

3.1.2 PIO_GetConfigAddressSpace
PIO_GetConfigAddressSpace(wBoardNo,*wBase,*wIrq, *wSubVendor,
*wSubDevice,*wSubAux,*wSlotBus, *wSlotDevice)
• wBoardNo=0 to N Æ totally N+1 boards found by PIO_DriveInit(….)
• wBase Æ base address of the board control word
• wIrq Æ allocated IRQ channel number of this board
• wSubVendor Æ subVendor ID of this board
• wSubDevice Æ subDevice ID of this board
• wSubAux Æ subAux ID of this board
• wSlotBus Æ hardware slot ID1 of this board
• wSlotDevice Æ hardware slot ID2 of this board
The user can use this function to save resource of all OME-PIO/PISO cards
installed in this system. Then the application program can control all functions of
OME-PIO/PISO series card directly. The sample program is given as follows:
/* step1: detect all OME-PIO-D56/OME-PIO-D24 cards first */
wSubVendor=0x80; wSubDevice=1; wSubAux=0x40; /* for OME-PIO-
D56/D24 */
wRetVal=PIO_DriverInit(&wBoards, wSubVendor,wSubDevice,wSubAux);
printf("There are %d OME-PIO-D56/OME-PIO-D24 Cards in this PC\n",wBoards);
/* step2: save resource of all OME-PIO-D56/OME-PIO-D24 cards installed in this
PC */
for (i=0; i<wBoards; i++)
{
PIO_GetConfigAddressSpace(i,&wBase,&wIrq,&t1,&t2,&t3,&t4,&t5);
printf("\nCard_%d: wBase=%x, wIrq=%x", i,wBase,wIrq);
wConfigSpace[i][0]=wBaseAddress; /* save all resource of this card */
wConfigSpace[i][1]=wIrq; /* save all resource of this card */
}
/* step3: control the OME-PIO-D56/OME-PIO-D24 directly */
wBase=wConfigSpace[0][0];/* get base address the card_0 */
outport(wBase,1); /* enable all D/I/O operations of card_0 */
wBase=wConfigSpace[1][0];/* get base address the card_1 */
outport(wBase,1); /* enable all D/I/O operations of card_1 */
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 30
Page 33

3.1.3 Show_PIO_PISO
Show_PIO_PISO(wSubVendor,wSubDevice,wSubAux)
• wSubVendor Æ subVendor ID of board to find
• wSubDevice Æ subDevice ID of board to find
• wSubAux Æ subAux ID of board to find
This function will output a text string for this special subIDs. This text string is the
same as that defined in PIO.H
The demo program is given as follows:
wRetVal=PIO_DriverInit(&wBoards,0xff,0xff,0xff); /*find all PIO_PISO*/
printf("\nThrer are %d PIO_PISO Cards in this PC",wBoards);
if (wBoards==0 ) exit(0);
printf("\n-----------------------------------------------------");
for(i=0; i<wBoards; i++)
{
PIO_GetConfigAddressSpace(i,&wBase,&wIrq,&wSubVendor,
&wSubDevice,&wSubAux,&wSlotBus,&wSlotDevice);
printf("\nCard_%d:wBase=%x,wIrq=%x,subID=[%x,%x,%x],
SlotID=[%x,%x]",i,wBase,wIrq,wSubVendor,wSubDevice,
wSubAux,wSlotBus,wSlotDevice);
printf(" --> ");
ShowPioPiso(wSubVendor,wSubDevice,wSubAux);
}
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 31
Page 34

3.2 The Assignment of I/O Address
The plug & play BIOS will assign the proper I/O address to the OME-
PIO/PISO series card. If there is only one OME-PIO/PISO board, the user can
identify the board as card_0. If there are two PIO/PISO boards in the system, the
user will be very difficult to identify which board is card_0? The software driver can
support 16 boards max. Therefore the user can install 16 boards of PIO/PSIO series
in one PC system. How to find the card_0 & card_1?
The simplest way to identify which card is card_0 is to use wSlotBus &
wSlotDevice as follows :
1. Remove all OME-PIO-D56/OME-PIO-D24 from this PC
2. Install one OME-PIO-D56/OME-PIO-D24 into the PC’s PCI_slot1, run
PIO_PISO.EXE & record the wSlotBus1 & wSlotDevice1
3. Remove all OME-PIO-D56/OME-PIO-D24 from this PC
4. Install one OME-PIO-D56/D24 into the PC’s PCI_slot2, run PIO_PISO.EXE &
record the wSlotBus2 & wSlotDevice2
5. Repeat (3) & (4) for all PCI_slot?, record all wSlotBus? & wSlotDevice?
The records may be as follows:
PC’s PCI slot wSlotBus wSlotDevice
Slot_1 0 0x07
Slot_2 0 0x08
Slot_3 0 0x09
Slot_4 0 0x0A
PCI-BRIDGE
Slot_5 1 0x0A
Slot_6 1 0x08
Slot_7 1 0x09
Slot_8 1 0x07
The above procedure will record all wSlotBus? & wSlotDevice? in this PC. These
values will be mapped to this PC’s physical slot. This mapping will not be changed
for any PIO/PISO cards. So it can be used to identify the specified OME-PIO/PISO
card as follows:
Step 1: Record all wSlotBus? & wSlotDevice?
Step2: Use PIO_GetConfigAddressSpace(…) to get the specified card’s wSlotBus
& wSlotDevice
Step3: The user can identify the specified OME-PIO/PISO card if the compare
the wSlotBus & wSlotDevice in step2 to step1.
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 32
Page 35

3.3 The I/O Address Map
The I/O address of OME-PIO/PISO series card is automatically
assigned by the main board ROM BIOS. The I/O address can also be re-
assigned by user. Users are strongly recommended to change the auto-
assigned I/O address. The plug & play BIOS will assign proper I/O
address to each OME-PIO/PISO series card very well. The I/O addresses
of OME-PIO-D56/OME-PIO-D24 are given as follows:
Address Read Write
Wbase+0 RESET\ control register Same
Wbase+2 Aux control register Same
Wbase+3 Aux data register Same
Wbase+5 INT mask control register Same
Wbase+7 Aux pin status register Same
Wbase+0x2a INT polarity control register Same
Wbase+0xc0 read Port0 write Port0
Wbase+0xc4 read Port1 write Port1
Wbase+0xc8 read Port2 write Port2
Wbase+0xcc read configuration Port0~Port2 configuration
Wbase+0xd0 read CON2 Low byte
(only for OME-PIO-D56)
Wbase+0xd4 read CON2 high byte
(only for OME-PIO-D56)
Note. Refer to Sec. 3.1 for more information about wBase.
write CON1 Low byte
(only for OME-PIO-D56)
write CON1 high byte
(only for OME-PIO-D56)
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 33
Page 36

3.3.1 RESET\ Control Register
(Read/Write): wBase+0
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Reserved Reserved Reserved Reserved Reserved Reserved Reserved RESET\
Note. Refer to Sec. 3.1 for more information about wBase.
When the PC is first powered up, the RESET\ signal is in Low-state. This will
disable all D/I/O operations. The user has to set the RESET\ signal to High-state
before any D/I/O command.
outportb(wBase,1); /* RESET\=High Æ all D/I/O are enable now */
outportb(wBase,0); /* RESET\=Low Æ all D/I/O are disable now */
3.3.2 AUX Control Register
(Read/Write): wBase+2
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Aux7 Aux6 Aux5 Aux4 Aux3 Aux2 Aux1 Aux0
Note. Refer to Sec. 3.1 for more information about wBase.
Aux?=0Æ this Aux is used as a D/I
Aux?=1Æ this Aux is used as a D/O
When the PC is first powered up, All Aux? signals are in Low-state. All Aux? are
designed as D/I for all OME-PIO/PISO series. Please set all Aux? in D/I state.
3.3.3 AUX data Register
(Read/Write): wBase+3
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Aux7 Aux6 Aux5 Aux4 Aux3 Aux2 Aux1 Aux0
Note. Refer to Sec. 3.1 for more information about wBase.
When the Aux? is used as D/O, the output state is controlled by this register.
This register is designed and reserved for feature extension, so do not control this
register now.
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 34
Page 37

3.3.4 INT Mask Control Register
(Read/Write): wBase+5
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 0 0 0 EN3 EN2 EN1 EN0
Note. Refer to Sec. 3.1 for more information about wBase.
EN0=0Æ disable PC0 as a interrupt signal (default)
EN0=1Æ enable PC0 as a interrupt signal
outportb(wBase+5,0); /* disable interrupt */
outportb(wBase+5,1); /* enable interrupt PC0 */
outportb(wBase+5,0x0f); /* enable interrupt PC0, PC1,PC2,PC3 */
3.3.5 Aux Status Register
(Read/Write): wBase+7
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Aux7 Aux6 Aux5 Aux4 Aux3 Aux2 Aux1 Aux0
Note. Refer to Sec. 3.1 for more information about wBase.
Aux0=PC0, Aux1=PC1, Aux2=PC2, Aux3=PC3, Aux7~4=Aux-ID. Refer to
DEMO5.C for more information. The Aux 0~3 are used as interrupt source. The
interrupt service routine has to read this register for interrupt source identification.
Refer to Sec. 2.5 for more information.
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 35
Page 38

3.3.6 Interrupt Polarity Control Register
(Read/Write): wBase+0x2A
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 0 0 0 INV3 INV2 INV1 INV0
Note. Refer to Sec. 3.1 for more information about wBase.
INV0=1Æ select the non-inverted signal from PC0
INV0=0Æ select the inverted signal from PC0
outportb(wBase+0x2a,0x0f); /* select the non-inverted input PC0/1/2/3 */
outportb(wBase+0x2a,0x00); /* select the inverted input of PC0/1/2/3 */
outportb(wBase+0x2a,0x0e); /* select the inverted input of PC0 */
/* select the non-inverted input PC1/2/3 */
outportb(wBase+0x2a,0x0c); /* select the inverted input of PC0/1 */
/* select the non-inverted input PC2/3 */
Refer to Sec. 2.4 for more information.
Refer to DEMO5.C for more information.
3.3.7 I/O Selection Control Register
(Write): wBase+0xcc
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 0 0 0 0 Port2 Port1 Port0
Note. Refer to Sec. 3.1 for more information about wBase.
Port? = 1Æ this port is used as a D/O port
Port? = 0Æ this port is used as a D/I port
outportb(wBase+0xcc,0x00); /* configure Port0/1/2 as D/I port */
outportb(wBase+0xcc,0x04); /* configure Port0/1 as D/I port */
/* configure Port2 as D/O port */
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 36
Page 39

3.3.8 Read/Write 8-bit data Register
(Read/Write):wBase+0xc0/0xc4/0xc8/0xd0/0xd4
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
D7 D6 D5 D4 D3 D2 D1 D0
Note. Refer to Sec. 3.1 for more information about wBase.
There are five/three 8-bit I/O ports in the OME-PIO-D56/OME-PIO-D24. Each
port is easy to read/write to by access to their own data registers.
outportb(wBase+0xc0,Val); /* write to D/O port */
Val=inportb(wBase+0xc0); /* read from D/I port */
outportb(wBase+0xcc,0x07); /* configure Port0~Port2 as DO port */
outportb(wBase+0xc0,i1); /* write to Port0 */
outportb(wBase+0xc0,i2); /* write to Port1 */
outportb(wBase+0xc0,i3); /* write to Port2 */
outportb(wBase+0xcc,0x01); /* configure Port0 as DO port */
/* Port1~Port2 as DI port */
outportb(wBase+0xc0,i1); /* write to Port0 */
j2=inportb(wBase+0xc4); /* read Port1 */
j3=inportb(wBase+0xc8); /* read Port2 */
l=inportb(wBase+0xd0); /* read CON2 Low byte */
h=inportb(wBase+0xd4); /* read CON2 High byte */
Val=(h<<8)+l; /* Val is 16 bit data */
outportb(wBase+0xd0,Val); /* write to CON1 Low byte */
outportb(wBase+0xd4,(Val>>8)); /* write to CON1 high byte */
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 37
Page 40

4. Demo program
It is recommended to read the release notes first. Important information will be given
in release note as follows:
1. Where you can find the software driver & utility?
2. How to install software & utility?
3. Where is the diagnostic program?
4. FAQs
There are many demo programs available on the software floppy disk or CD.
After the software installation, the driver will be installed into disk as follows:
• \TC\*.* Æ for Turbo C 2.xx or above
• \MSC\*.* Æ for MSC 5.xx or above
• \BC\*.* Æ for BC 3.xx or above
• \TC\LIB\*.* Æ for TC library
• \TC\DEMO\*.* Æ for TC demo program
• \TC\LIB\Large\*.* Æ TC large model library
• \TC\LIB\Huge\*.* Æ TC huge model library
• \TC\LIB\Large\PIO.H Æ TC declaration file
• \TC\\LIB\Large\TCPIO_L.LIB Æ TC large model library file
• \TC\LIB\Huge\PIO.H Æ TC declaration file
• \TC\\LIB\Huge\TCPIO_H.LIB Æ TC huge model library file
• \MSC\LIB\Large\PIO.H Æ MSC declaration file
• \MSC\LIB\Large\MSCPIO_L.LIB Æ MSC large model library file
• \MSC\LIB\Huge\PIO.H Æ MSC declaration file
• \MSC\\LIB\Huge\MSCPIO_H.LIB Æ MSC huge model library file
• \BC\LIB\Large\PIO.H Æ BC declaration file
• \BC\LIB\Large\BCPIO_L.LIB Æ BC large model library file
• \BC\LIB\Huge\PIO.H Æ BC declaration file
• \BC\\LIB\Huge\BCPIO_H.LIB Æ BC huge model library file
NOTE: The library is validated for all OME-PIO/PISO series cards.
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 38
Page 41

4.1 PIO_PISO
/* ------------------------------------------------------------ */
/* Find all PIO_PISO series cards in this PC system */
/* step 1 : plug all PIO_PISO cards into PC */
/* step 2 : run PIO_PISO.EXE */
/* ------------------------------------------------------------ */
#include "PIO.H"
WORD wBase,wIrq;
WORD wBase2,wIrq2;
int main()
{
int i,j,j1,j2,j3,j4,k,jj,dd,j11,j22,j33,j44;
WORD wBoards,wRetVal;
WORD wSubVendor,wSubDevice,wSubAux,wSlotBus,wSlotDevice;
char c;
float ok,err;
clrscr();
wRetVal=PIO_DriverInit(&wBoards,0xff,0xff,0xff); /*for PIO-PISO*/
printf("\nThrer are %d PIO_PISO Cards in this PC",wBoards);
if (wBoards==0 ) exit(0);
printf("\n-----------------------------------------------------");
for(i=0; i<wBoards; i++)
{
PIO_GetConfigAddressSpace(i,&wBase,&wIrq,&wSubVendor,
&wSubDevice,&wSubAux,&wSlotBus,&wSlotDevice);
printf("\nCard_%d:wBase=%x,wIrq=%x,subID=[%x,%x,%x],
SlotID=[%x,%x]",i,wBase,wIrq,wSubVendor,wSubDevice,
wSubAux,wSlotBus,wSlotDevice);
printf(" --> ");
ShowPioPiso(wSubVendor,wSubDevice,wSubAux);
}
PIO_DriverClose();
}
NOTE: the PIO_PISO.EXE is valid for all PIO/PISO cards. The user can execute
the PIO_PISO.EXE to get the following information:
• List all PIO/PISO cards installed in this PC
• List all resources allocated to every PIO/PISO cards
• List the wSlotBus & wSlotDevice for specified PIO/PISO card identification.
(Refer to Sec. 3.2 for more information)
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 39
Page 42

4.1.1 PIO_PISO.EXE for Windows
User can find this utility in the company CD or floppy disk. It is useful for all
OME-PIO/PISO series card.
After executing the utility, detailed information for all OME-PIO/PISO cards that
installed in the PC will be show as follows:
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 40
Page 43

4.2 DEMO1
/* demo 1 : D/O demo of CON3 */
/* step 1 : connect a OME-DB-24C to CON3 of OME-PIO-D56/D24 */
/* step 2 : run DEMO1.EXE */
/* step 3 : LEDs of OME-DB-24C will turn on sequentially */
/* -------------------------------------------------------------- */
#include "PIO.H"
WORD wBase,wIrq;
int main()
{
int i1,i2,i3;
long i;
WORD wBoards,wRetVal,t1,t2,t3,t4,t5,t6;
WORD wSubVendor,wSubDevice,wSubAux,wSlotBus,wSlotDevice;
char c;
clrscr();
/* step1 : find address-mapping of PIO/PISO cards */
wRetVal=PIO_DriverInit(&wBoards,0x80,0x01,0x40);/* for OME-PIOD56/D24*/
printf("\n(1) Threr are %d OME-PIO-D56/D24 Cards in this PC",wBoards);
if ( wBoards==0 ) exit(0);
printf("\n\n-------------- The Configuration Space --------------");
for(i=0;i<wBoards;i++)
{
PIO_GetConfigAddressSpace(i,&wBase,&wIrq,&wSubVendor,
&wSubDevice,&wSubAux,&wSlotBus,&wSlotDevice);
printf("\nCard_%d:wBase=%x,wIrq=%x,subID=[%x,%x,%x],SlotID=
[%x,%x]",i,wBase,wIrq,wSubVendor,wSubDevice,
wSubAux,wSlotBus,wSlotDevice);
printf(" --> ");
ShowPioPiso(wSubVendor,wSubDevice,wSubAux);
}
PIO_GetConfigAddressSpace(0,&wBase,&wIrq,&t1,&t2,&t3,&t4,&t5);
/* select card_0 */
/* step2 : enable all D/I/O port */
outportb(wBase,1); /* /RESET -> 1 */
/* step3 : configure I/O direction */
outportb(wBase+0xcc,0x07); /* set CON3 as D/O ports */
i=1;
for (;;)
{
i1=i&0xff;
i2=(i>>8)&0xff;
i3=(i>>16)&0xff;
outportb(wBase+0xc0,i1);
outportb(wBase+0xc4,i2);
outportb(wBase+0xc8,i3);
delay(10000);
i=i<<1;
i=i&0x0ffffff;
if (i==0) i=1;
if (kbhit()!=0) break;
}
PIO_DriverClose();
}
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 41
Page 44

4.3 DEMO2
/* demo 2 : DI/O demo of CON1, CON2 & CON3 */
/* step 1 : connect OME-DB-24P to CON3 of OME-PIO-D56/D24 */
/* : connect CON1 t0 CON2 of OME-PIO-D56 */
/* step 2 : run DEMO2.EXE */
/* step 3 : check the information on screen D/I will same as D/O */
/* : check the result on screen will same as CON3 input */
/* -------------------------------------------------------------- */
#include "PIO.H"
WORD wBase,wIrq;
int main()
{
int i1,i2,i3,j1,j2,j3;
WORD wBoards,wRetVal,t1,t2,t3,t4,t5,t6;
WORD wSubVendor,wSubDevice,wSubAux,wSlotBus,wSlotDevice;
char c;
long i;
clrscr();
/* step1 : find address-mapping of PIO/PISO cards */
.
.
/* step2 : enable all D/I/O port */
outportb(wBase,1); /* /RESET -> 1 */
/* step3 : configure I/O direction */
outportb(wBase+0xcc,0x00); /* set CON3 as D/I ports */
i=1;
for (;;)
{
gotoxy(1,7);
i1=i&0xff;
i2=(i>>8)&0xff;
outportb(wBase+0xd0,i1);
outportb(wBase+0xd4,i2);
j1=inportb(wBase+0xd0);
j2=inportb(wBase+0xd4);
printf("\nDO = [%2x,%2x], DI = [%2x,%2x]",i2,i1,j2,j1);
if ((j1!=i1)||(j2!=i2))
{
printf("\n\nError ......");
}
else printf("\nO.K. ......");
j1=inportb(wBase+0xc0);
j2=inportb(wBase+0xc4);
j3=inportb(wBase+0xc8);
printf("\n\nD/I of CON3 [PA, PB, PC] = [%2x,%2x,%2x] ",j1,j2,j3);
i=i<<1;
i=i&0x0ffff;
if (i==0) i=1;
if (kbhit()!=0) return;
}
PIO_DriverClose();
}
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 42
Page 45

4.4 DEMO3
/* demo 3 : Count high pulse of PC0 */
/* (initial Low & active High) */
/* step 1 : run DEMO3.EXE */
/* -------------------------------------------------------------- */
#include "PIO.H"
#define A1_8259 0x20
#define A2_8259 0xA0
#define EOI 0x20
WORD init_low();
WORD wBase,wIrq;
static void interrupt irq_service();
int COUNT,irqmask,now_int_state;
int main()
{
int i,j;
WORD wBoards,wRetVal,t1,t2,t3,t4,t5,t6;
WORD wSubVendor,wSubDevice,wSubAux,wSlotBus,wSlotDevice;
char c;
clrscr();
/* step1 : find address-mapping of PIO/PISO cards */
.
.
/* select card_0 */
/* step2 : enable all D/I/O port */
outportb(wBase,1); /* /RESET -> 1 */
/* step3 : configure I/O direction */
outportb(wBase+0xcc,0x00); /* set CON3 as D/I ports */
COUNT=0;
init_low();
printf("\n\n***** show the count of High_pulse *****\n");
for (;;)
{
gotoxy(1,8);
printf("\nCOUNT=%d",COUNT);
if (kbhit()!=0) break;
}
outportb(wBase+5,0); /* disable all interrupt */
PIO_DriverClose();
}
/* Use PC0 as external interrupt signal */
WORD init_low()
{
disable();
outportb(wBase+5,0); /* disable all interrupt */
if (wIrq<8)
{
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 43
Page 46

irqmask=inportb(A1_8259+1);
outportb(A1_8259+1,irqmask & 0xff ^ (1<<wIrq));
setvect(wIrq+8,irq_service);
}
else
{
irqmask=inportb(A1_8259+1);
outportb(A1_8259+1,irqmask & 0xfb); /* IRQ2 */
irqmask=inportb(A2_8259+1);
outportb(A2_8259+1,irqmask & 0xff ^ (1<<(wIrq-8)));
setvect(wIrq-8+0x70,irq_service);
}
outportb(wBase+5,1); /* enable interrupt (PC0) */
now_int_state=0; /* now ini_signal is low */
outportb(wBase+0x2a,1); /* select the non-inverte */
enable();
}
void interrupt irq_service()
{
if (now_int_state==1) /* now PC0 change to low */
{ /* INT_CHAN_0 = !PC0 */
if ((inportb(wBase+7)&1)==0) /* PC0 still fixed in low */
{ /* need to generate a high pulse */
outportb(wBase+0x2a,1); /* INV0 select noninverted input */
now_int_state=0; /* now PC0=low */
}
else now_int_state=1; /* now PC0=High */
}
else /* now PC0 change to high */
{ /* INT_CHAN_0 = PC0 */
COUNT++;
if ((inportb(wBase+7)&1)==1) /* PC0 still fixed in high */
{ /* need to generate a high pulse */
outportb(wBase+0x2a,0); /* INV0 select inverted input */
now_int_state=1; /* now PC0=high */
}
else now_int_state=0; /* now PC0=low */
}
if (wIrq>=8) outportb(A2_8259,0x20);
outportb(A1_8259,0x20);
}
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 44
Page 47

4.5 DEMO4
/* demo 4 : Count high pulse of PC0 */
/* (initial High & active Low) */
/* step 1 : run DEMO4.EXE */
/* -------------------------------------------------------------- */
#include "PIO.H"
#define A1_8259 0x20
#define A2_8259 0xA0
#define EOI 0x20
WORD init_high();
WORD wBase,wIrq;
static void interrupt irq_service();
int COUNT,irqmask,now_int_state;
int main()
{
int i,j;
WORD wBoards,wRetVal,t1,t2,t3,t4,t5,t6;
WORD wSubVendor,wSubDevice,wSubAux,wSlotBus,wSlotDevice;
char c;
clrscr();
/* step1 : find address-mapping of PIO/PISO cards */
.
.
/* select card_0 */
/* step2 : enable all D/I/O port */
outportb(wBase,1); /* /RESET -> 1 */
/* step3 : configure I/O direction */
outportb(wBase+0xcc,0x00); /* set CON3 as D/I ports */
COUNT=0;
init_high();
printf("\n\n***** show the count of Low_pulse *****\n");
for (;;)
{
gotoxy(1,7);
printf("\nCOUNT=%d",COUNT);
if (kbhit()!=0) break;
}
outportb(wBase+5,0); /* disable all interrupt */
PIO_DriverClose();
}
/* Use PC0 as external interrupt signal */
WORD init_high()
{
disable();
outportb(wBase+5,0); /* disable all interrupt */
if (wIrq<8)
{
irqmask=inportb(A1_8259+1);
outportb(A1_8259+1,irqmask & 0xff ^ (1<<wIrq));
setvect(wIrq+8,irq_service);
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 45
Page 48

}
else
{
irqmask=inportb(A1_8259+1);
outportb(A1_8259+1,irqmask & 0xfb); /* IRQ2 */
irqmask=inportb(A2_8259+1);
outportb(A2_8259+1,irqmask & 0xff ^ (1<<(wIrq-8)));
setvect(wIrq-8+0x70,irq_service);
}
outportb(wBase+5,1); /* enable interrupt (PC0) */
now_int_state=1; /* now ini_signal is high */
outportb(wBase+0x2a,0); /* select the inverte */
enable();
}
void interrupt irq_service()
{
if (now_int_state==1) /* now PC0 change to low */
{ /* INT_CHAN_0 = !PC0 */
COUNT++;
if ((inportb(wBase+7)&1)==0) /* PC0 still fixed in low */
{ /* need to generate a high pulse */
outportb(wBase+0x2a,1); /* INV0 select noninverted input */
now_int_state=0; /* now PC0=low */
}
else now_int_state=1; /* now PC0=High */
}
else /* now PC0 change to high */
{ /* INT_CHAN_0 = PC0 */
if ((inportb(wBase+7)&1)==1) /* PC0 still fixed in high */
{ /* need to generate a high pulse */
outportb(wBase+0x2a,0); /* INV0 select inverted input */
now_int_state=1; /* now PC0=high */
}
else now_int_state=0; /* now PC0=low */
}
if (wIrq>=8) outportb(A2_8259,0x20);
outportb(A1_8259,0x20);
}
OME-PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 46
Page 49

4.6 DEMO5
/* demo 5 : Four interrupt source */
/* PC0 : initial Low , active High */
/* PC1 : initial High , active Low */
/* PC2 : initial Low , active High */
/* PC3 : initial High , active Low */
/* step 1 : run DEMO5.EXE */
/* -------------------------------------------------------------- */
#include "PIO.H"
#define A1_8259 0x20
#define A2_8259 0xA0
#define EOI 0x20
WORD init();
WORD wBase,wIrq;
static void interrupt irq_service();
int irqmask,now_int_state,new_int_state,invert,int_c,int_num;
int CNT_L1,CNT_L2,CNT_L3,CNT_L4;
int CNT_H1,CNT_H2,CNT_H3,CNT_H4;
int main()
{
int i,j;
WORD wBoards,wRetVal,t1,t2,t3,t4,t5,t6;
WORD wSubVendor,wSubDevice,wSubAux,wSlotBus,wSlotDevice;
char c;
clrscr();
/* step1 : find address-mapping of PIO/PISO cards */
.
.
/* select card_0 */
/* step2 : enable all D/I/O port */
outportb(wBase,1); /* /RESET -> 1 */
/* step3 : configure I/O direction */
outportb(wBase+0xcc,0x00); /* set CON3 as D/I ports */
init();
printf("\n***** show the count of pulse *****\n");
for (;;)
{
gotoxy(1,7);
printf("\n(CNT_L,CNT_H)=(%d,%d) (%d,%d) (%d,%d) (%d,%d)
%x",CNT_L1,CNT_H1,CNT_L2,CNT_H2,CNT_L3,CNT_H3,CNT_L4,CNT_H4,int_num);
if (kbhit()!=0) break;
}
outportb(wBase+5,0); /* disable all interrupt */
PIO_DriverClose();
}
/* Use PC0, PC1, PC2 & PC3 as external interrupt signal */
WORD init()
{
disable();
outportb(wBase+5,0); /* disable all interrupt */
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 47
Page 50

if (wIrq<8)
{
irqmask=inportb(A1_8259+1);
outportb(A1_8259+1,irqmask & 0xff ^ (1<<wIrq));
setvect(wIrq+8,irq_service);
}
else
{
irqmask=inportb(A1_8259+1);
outportb(A1_8259+1,irqmask & 0xfb); /* IRQ2 */
irqmask=inportb(A2_8259+1);
outportb(A2_8259+1,irqmask & 0xff ^ (1<<(wIrq-8)));
setvect(wIrq-8+0x70,irq_service);
}
invert=0x05;
outportb(wBase+0x2a,invert); /* PC0 = non-inverte input */
/* PC1 = inverte input */
/* PC2 = non-inverte input */
/* PC3 = inverte input */
now_int_state=0x0a; /* PC0 = Low */
/* PC1 = High */
/* PC2 = Low */
/* PC3 = High */
CNT_L1=CNT_L2=CNT_L3=CNT_L4=0; /* Low_pulse counter */
CNT_H1=CNT_H2=CNT_H3=CNT_H4=0; /* High_pulse counter */
int_num=0;
outportb(wBase+5,0x0f); /* enable interrupt PC0,PC1 */
enable(); /* PC2,PC3 */
}
/* -------------------------------------------------------------- */
/* NOTE:1.The hold-time of INT_CHAN_0/1/2/3 must long enough */
/* 2.The ISR must read the interrupt status again to the */
/* active interrupt sources. */
/* 3.The INT_CHAN_0&INT_CHAN_1 can be active at the same time*/
/* -------------------------------------------------------------- */
void interrupt irq_service()
{
char c;
int_num++;
new_int_state=inportb(wBase+7)&0x0f; /* read all interrupt state */
int_c=new_int_state^now_int_state; /* compare which interrupt */
/* signal be change */
if ((int_c&0x1)!=0) /* INT_CHAN_0 is active */
{
if ((new_int_state&0x1)!=0)/* now PC0 is change to high */
{
CNT_H1++;
}
else /* now PC0 is change to low */
{
CNT_L1++;
}
invert=invert^1; /* to generate a high pulse */
}
if ((int_c&0x2)!=0) /* INT_CHAN_1 is active */
{
if ((new_int_state&0x2)!=0)/* now PC1 is change to high */
{
CNT_H2++;
}
PIO-D56/PIO-D24 User Manual (Ver.2.1, Oct/2003, PPH-005-21) ---- 48
Page 51

else /* now PC1 is change to low */
{
CNT_L2++;
}
invert=invert^2; /* to generate a high pulse */
}
if ((int_c&0x4)!=0) /* INT_CHAN_2 is active */
{
if ((new_int_state&0x4)!=0)/* now PC2 is change to high */
{
CNT_H3++;
}
else /* now PC2 is change to low */
{
CNT_L3++;
}
invert=invert^4; /* to generate a high pulse */
}
if ((int_c&0x8)!=0) /* INT_CHAN_3 is active */
{
if ((new_int_state&0x8)!=0)/* now PC3 is change to high */
{
CNT_H4++;
}
else /* now PC3 is change to low */
{
CNT_L4++;
}
invert=invert^8; /* to generate a high pulse */
}
now_int_state=new_int_state;
outportb(wBase+0x2a,invert);
if (wIrq>=8) outportb(A2_8259,0x20);
outportb(A1_8259,0x20);
}
OME-PIO-D56/OME-PIO-D24 User Manual (Ver.2.1, Oct/2003) ---- 49
Page 52

WARRANTY/DISCLAIMER
OMEGA ENGINEERING, INC. warrants this unit to be free of defects in materials and workmanship for a
period of 13 months from date of purchase. OMEGA’s WARRANTY adds an additional one (1) month
grace period to the normal one (1) year product warranty to cover handling and shipping time. This
ensures that OMEGA’s customers receive maximum coverage on each product.
If the unit malfunctions, it must be returned to the factory for evaluation. OMEGA’s Customer Service
Department will issue an Authorized Return (AR) number immediately upon phone or written request.
Upon examination by OMEGA, if the unit is found to be defective, it will be repaired or replaced at no
charge. OMEGA’s WARRANTY does not apply to defects resulting from any action of the purchaser,
including but not limited to mishandling, improper interfacing, operation outside of design limits,
improper repair, or unauthorized modification. This WARRANTY is VOID if the unit shows evidence of
having been tampered with or shows evidence of having been damaged as a result of excessive corrosion;
or current, heat, moisture or vibration; improper specification; misapplication; misuse or other operating
conditions outside of OMEGA’s control. Components which wear are not warranted, including but not
limited to contact points, fuses, and triacs.
OMEGA is pleased to offer suggestions on the use of its various products. However,
OMEGA neither assumes responsibility for any omissions or errors nor assumes liability for any
damages that result from the use of its products in accordance with information provided by
OMEGA, either verbal or written. OMEGA warrants only that the parts manufactured by it will be
as specified and free of defects. OMEGA MAKES NO OTHER WARRANTIES OR
REPRESENTATIONS OF ANY KIND WHATSOEVER, EXPRESS OR IMPLIED, EXCEPT THAT OF TITLE,
AND ALL IMPLIED WARRANTIES INCLUDING ANY WARRANTY OF MERCHANTABILITY AND
FITNESS FOR A PARTICULAR PURPOSE ARE HEREBY DISCLAIMED. LIMITATION OF
LIABILITY: The remedies of purchaser set forth herein are exclusive, and the total liability of
OMEGA with respect to this order, whether based on contract, warranty, negligence,
indemnification, strict liability or otherwise, shall not exceed the purchase price of the
component upon which liability is based. In no event shall OMEGA be liable for
consequential, incidental or special damages.
CONDITIONS: Equipment sold by OMEGA is not intended to be used, nor shall it be used: (1) as a “Basic
Component” under 10 CFR 21 (NRC), used in or with any nuclear installation or activity; or (2) in medical
applications or used on humans. Should any Product(s) be used in or with any nuclear installation or
activity, medical application, used on humans, or misused in any way, OMEGA assumes no responsibility
as set forth in our basic WARRANTY/ DISCLAIMER language, and, additionally, purchaser will indemnify
OMEGA and hold OMEGA harmless from any liability or damage whatsoever arising out of the use of the
Product(s) in such a manner.
RETURN REQUESTS/INQUIRIES
Direct all warranty and repair requests/inquiries to the OMEGA Customer Service Department. BEFORE
RETURNING ANY PRODUCT(S) TO OMEGA, PURCHASER MUST OBTAIN AN AUTHORIZED RETURN
(AR) NUMBER FROM OMEGA’S CUSTOMER SERVICE DEPARTMENT (IN ORDER TO AVOID
PROCESSING DELAYS). The assigned AR number should then be marked on the outside of the return
package and on any correspondence.
The purchaser is responsible for shipping charges, freight, insurance and proper packaging to prevent
breakage in transit.
FOR W
ARRANTY
RETURNS, please have the
following information available BEFORE
contacting OMEGA:
1. Purchase Order number under which the product
was PURCHASED,
2. Model and serial number of the product under
warranty, and
3. Repair instructions and/or specific problems
relative to the product.
FOR NON-W
ARRANTY
REPAIRS,
consult OMEGA
for current repair charges. Have the following
information available BEFORE contacting OMEGA:
1. Purchase Order number to cover the COST
of the repair,
2. Model and serial number of the product, and
3. Repair instructions and/or specific problems
relative to the product.
OMEGA’s policy is to make running changes, not model changes, whenever an improvement is possible. This affords
our customers the latest in technology and engineering.
OMEGA is a registered trademark of OMEGA ENGINEERING, INC.
© Copyright 2002 OMEGA ENGINEERING, INC. All rights reserved. This document may not be copied, photocopied,
reproduced, translated, or reduced to any electronic medium or machine-readable form, in whole or in part, without the
prior written consent of OMEGA ENGINEERING, INC.
Page 53

M4038/0104
Where Do I Find Everything I Need for
Process Measurement and Contr ol?
OMEGA…Of Course!
Shop online at www.omega.com
TEMPERA TURE
Thermocouple, RTD & Thermistor Probes, Connectors, Panels & Assemblies
Wire: Thermocouple, RTD & Thermistor
Calibrators & Ice Point References
Recorders, Controllers & Process Monitors
Infrared Pyrometers
PRESSURE, STRAIN AND FORCE
Transducers & Strain Gages
Load Cells & Pressure Gages
Displacement Transducers
Instrumentation & Accessories
FLOW/LEVEL
Rotameters, Gas Mass Flowmeters & Flow Computers
Air Velocity Indicators
Turbine/Paddlewheel Systems
Totalizers & Batch Controllers
pH/CONDUCTIVITY
pH Electrodes, Testers & Accessories
Benchtop/Laboratory Meters
Controllers, Calibrators, Simulators & Pumps
Industrial pH & Conductivity Equipment
DA TA ACQUISITION
Data Acquisition & Engineering Software
Communications-Based Acquisition Systems
Plug-in Cards for Apple, IBM & Compatibles
Datalogging Systems
Recorders, Printers & Plotters
HEA TERS
Heating Cable
Cartridge & Strip Heaters
Immersion & Band Heaters
Flexible Heaters
Laboratory Heaters
ENVIRONMENT AL
MONITORING AND CONTROL
Metering & Control Instrumentation
Refractometers
Pumps & Tubing
Air, Soil & Water Monitors
Industrial Water & Wastewater Treatment
pH, Conductivity & Dissolved Oxygen Instruments
 Loading...
Loading...