

E2U0052-18-86
¡ Semiconductor
This version: Aug. 1998
MSM7718-01
¡ Semiconductor
MSM7718-01
Echo Canceler with ADPCM CODEC
GENERAL DESCRIPTION
The MSM7718, developed for PHS (Personal Handyphone System) applications, is a CMOS LSI
device and contains a line echo canceler and a single channel full-duplex ADPCM transcoder
that performs interconversion between voice-band analog signal and 32 kbps ADPCM data.
This device includes DTMF tone and several types of tone generation, transmit/receive data mute
and gain control, and VOX function and is best suited for master telephones in PHS applications.
FEATURES
• Single 3 V power supply VDD : 2.7 V to 3.6 V
• ADPCM : ITU-T Recommendations G.726 (32 kbps)
• Full-Duplex single channel operation
• Transmit/receive synchronous mode
• PCM interface coding format : µ-law
• Built-in line echo canceler
Echo attenuation : 30 dB (typ.)
Cancelable echo delay time :
Normal speech mode : 23 ms (max.)
Line echo canceler expansion mode : 54 ms (max.)
• Serial PCM/ADPCM transmission data rate : 64 kbps to 2048 kbps
• Low power consumption
Operating mode : Typically 66 mW (VDD = 3.0 V)
Power-down mode : Typically 0.3 mW (VDD = 3.0 V)
• Two analog input gain adjustable amplifier stages
• Analog output stage : Push-pull drive, (direct drive of 350 W + 120 nF)
• Master clock frequency : 9.600/19.200 MHz
• Transmit/receive mute, transmit/receive programmable gain control
• Built-in DTMF tone generator and various ringing tones generator
• DTMF tone and call progress tone detection
• Serial MCU interface control
• Built-in VOX control
Transmit side : Voice/silence detect
Receive side : Background noise generation at the absence of voice signal
• Built-in 2100 Hz tone detection (bidirectional)
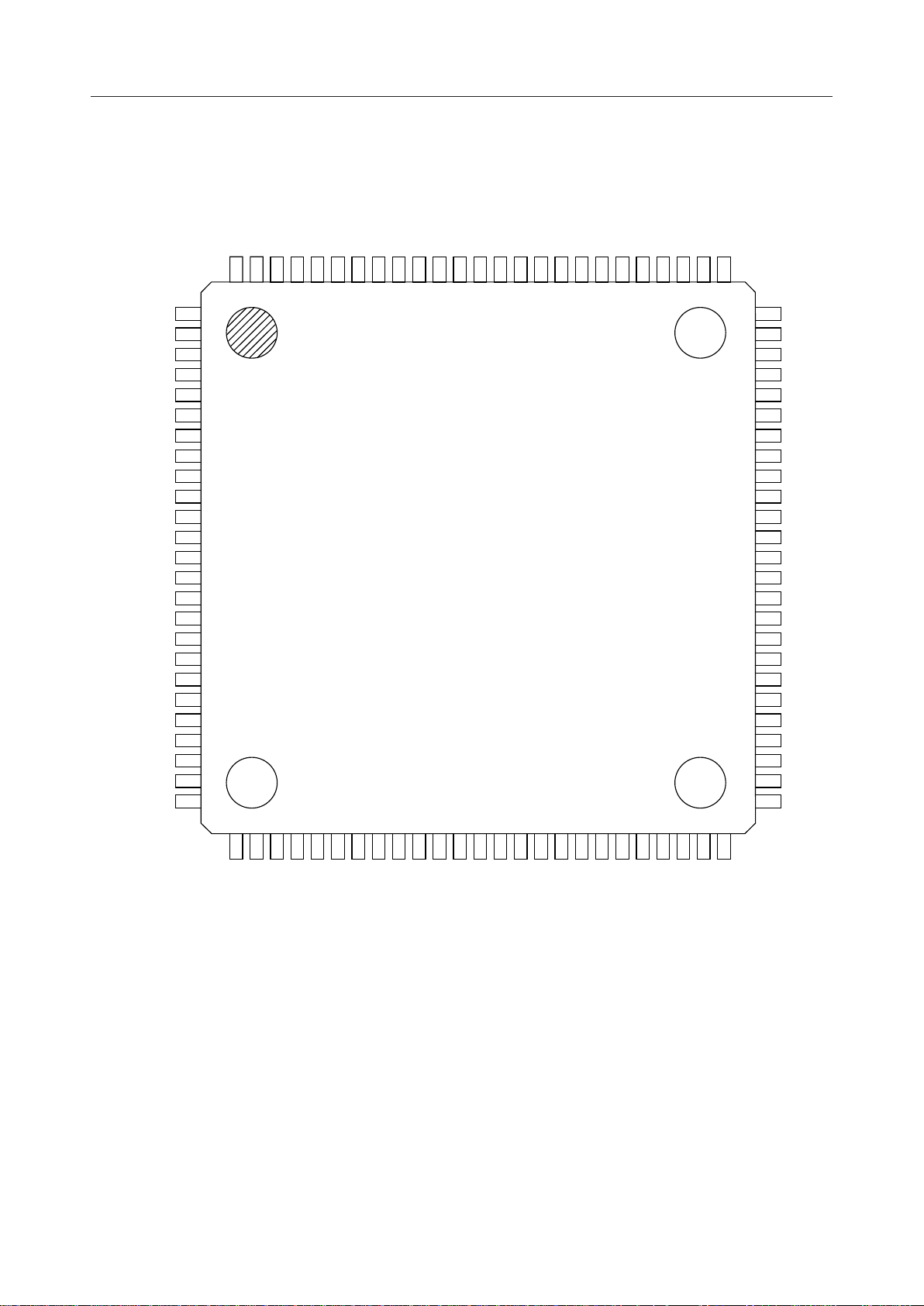
• Package:
100-pin plastic TQFP (TQFP100-1414-0.50-K) (Product name : MSM7718-01TS-K)
1/38
¡ Semiconductor
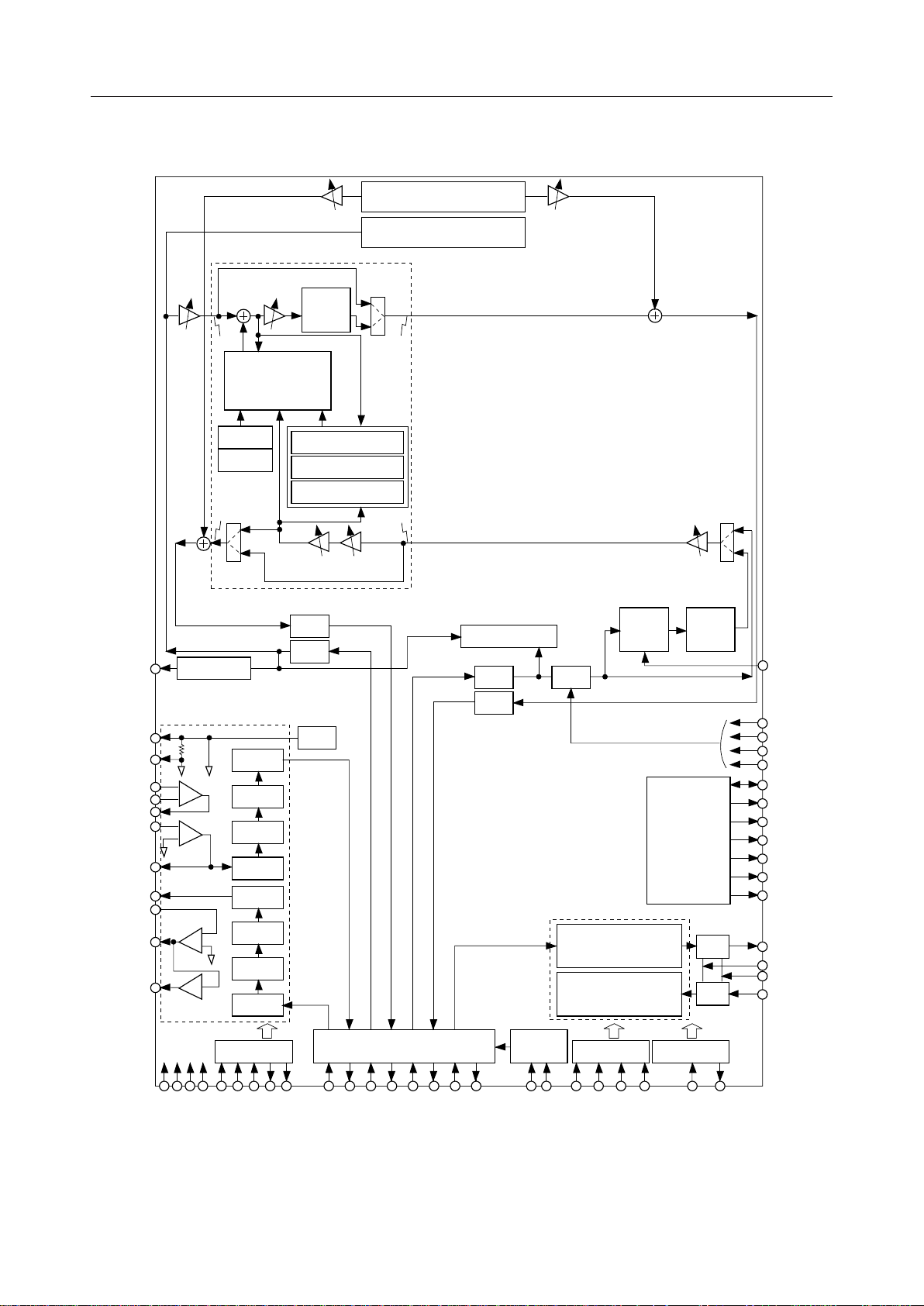
BLOCK DIAGRAM
MSM7718-01
VOXO
SGR
SGT
AIN1–
AIN1+
GSX1
AIN2
GSX2
VFRO
PWI
AOUT–
AOUT+
ATTtx
SinL
RoutL
Voice Detect
PCM CODEC
–
+
–
+
1.2 kW
–
+
–1
1.2 kW
ATTtgrx
ATTsL
+
–
Line
Adapive FIR Filter
(LAFF)
Coeff.L0
Coeff.L1
Howling Detector
Double Talk Detector
GainL ATTrL
Line Echo Canceler
L/m
m/L
VREF
L/m
BPF
ADC
RC LPF
RC LPF
DAC
LPF
m/L
Center
Clip
Power Calc.
Tone Generator (DTMF etc.)
Tone Detector (DTMF etc.)
SoutL
RinL
2100 Hz Detect
m/L
L/m
ATTtgtx
ATTrx
Power
Detect
Mute
Flash
Memory
Controller
(Reserved)
ADPCM TRANSCODER
ADPCM
CODER
ADPCM
DECODER
Noise
Gen.
P/S
S/P
VOXI
MLV0
MLV1
MLV2
MUTE
D7-0
A20-0
WE
OE
CS1
CS2
RP
IS
BCLKA
SYNCA
IR
DDA
V
DDD1,2,3
DG1,2,3
V
MCU Interface
AG
DEN
EXCK
DIN
INT
DOUT
PCMPCI
PCMPCO
P/S&S/P
PCMLNI
PCMLNO
PCMACI
PCMACO
PCMADI
PCMADO
Timing
Gen.
SYNCP
BCLKP
MCKSL
Clock Gen.
MCK
PDN/RST
Test Interface
PDWN
TSTO
TSTI1-4
2/38
¡ Semiconductor
MSM7718-01
NC
DDD1
DDD3
V
TSTI1
BCLKA
SYNCA
IR
BCLKP
NC
PCMPCI
PCMLNI
PCMACI
PCMADI
DOUT
IS
PCMPCO
PCMLNO
DG3
PCMACO
PCMADO
NC
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
1
2TSTI2
3PDN/RST
4DIN
5EXCK
6DEN
7V
8SYNCP
9TSTI4
10TSTI3
11MCK
12MCKSL
13GNDA
14VFRO
15PWI
16AOUT–
17AOUT+
18SGT
19SGR
20NC
21NC
22AIN1–
23GSX1
24AIN1+
25NC
PDWN
81
RP
80
WE
79
OE
78
CS1
77
NC
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
NC
CS2
INT
TSTO
VOXO
VOXI
MLV0
MLV1
MLV2
MUTE
DG2
D7
NC
D6
D5
D4
D3
D2
D1
D0
A0
A1
A2
V
DDD2
NC
26
NC
27
GSX2
28
AIN2
29
V
DDA
30
DG1
37
36
35
34
33
32
31
NC
A15
A16
A17
A18
A19
A20
NC: No-connect pin
100-Pin Plastic TQFP
38
A14
39
A13
40
A12
41
A11
42
A10
43
A9
44
A8
45
A7
46
A6
47
A5
48
A4
49
A3
50
NC
3/38
¡ Semiconductor
MSM7718-01
PIN FUNCTIONAL DESCRIPTION
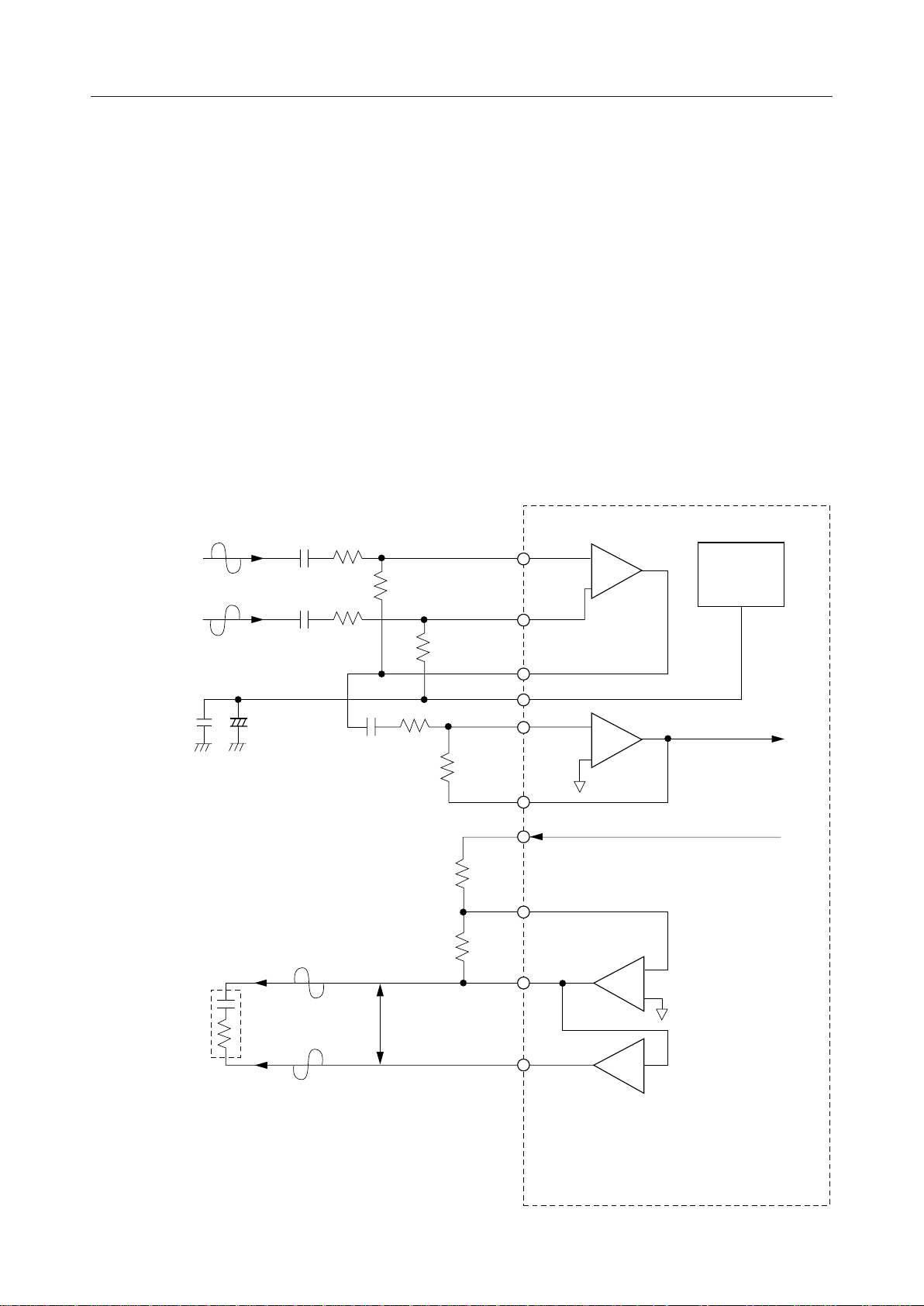
AIN1+, AIN1–, AIN2, GSX1, GSX2
Transmit analog inputs and the outputs for transmit gain adjustment.
AIN1– (AIN2) connects to inverting input of the internal transmit amplifier. AIN1+ connects to noninverting input of the internal transmit amplifier. GSX1 (GSX2) connects to the internal transmit
amplifier output. Refer to Fig.1 for gain adjustment.
VFRO, AOUT+, AOUT–, PWI
Receive analog outputs and the output for receive gain adjustment.
VFRO is the receive filter output. AOUT+ and AOUT– are differential analog signal outputs which
can directly drive ZL (= 350 W + 120 nF) or a 1.2 kW load. Refer to Fig.1 for gain adjustment.
However, these outputs are in high impedance state during power-down.
Differential
Analog Input
V1
+
–
Transmit Gain: V
= (R2/R1) ¥ (R4/R3)
Receive Gain: V
= 2 ¥ (R5/R6)
C1
C1 R1
GSX2
O/VVFRO
R1
/Vi
C2
R2
R3
R2
R4
R6
R5
AIN1–
AIN1+
GSX1
SGT
AIN2
GSX2
VFRO
PWI
AOUT–
–
+
–
+
–
VREF
to ENCODER
from DECODER
ZL=120 nF + 350 W
Differential
V
O
Analog
Output
AOUT+
Figure 1 Analog Interface
+
–1
4/38

¡ Semiconductor
MSM7718-01
SGT, SGR
Outputs of the analog signal ground voltage.
SGT outputs the analog signal ground voltage of the transmit system, and SGR outputs the analog
signal ground voltage for the receive system. The output voltage is approximately 1.4 V. Connect
bypass capacitors of 10 mF and 0.1 mF (ceramic type) between these pins and the AG pin. However
to reduce the response time of the receiver power-on, it is recommended to apply bypass capacitors
of 1 mF and 0.1 mF. During power-down, the output changes to 0 V.
AG
Analog ground.
DG1, 2, 3
Digital ground.
V
DDA
+3 V power supply for analog circuits.
V
DDD1, 2, 3
+3 V power supply for digital circuits.
PDN/RST
Power-down reset control input.
A logic “0” makes the LSI device enter a power-down state. At the same time, all control register
data is reset to the initial state. Set this pin to a logic “1” during normal operating mode. Since the PDN/
RST pin is ORed with CR0-B5 of the control register, set CR0-B5 to digital “0” when using this pin.
PDWN
Power-down control input.
When set to a logic “0”, the device changes to the power-down state, but each bit of control register
and internal variables of control register are retained. During normal operation, set this pin to logic
“1”. Since the PDWN pin is ORed with CR0-B6 of the control register, set CR0-B6 to logic “0” when
using this pin.
MCK
Master clock input.
The frequency must be 9.6 MHz or 19.2 MHz. The master clock signal is allowed to be asynchronous
with SYNCP, SYNCA, BCLKP, and BCLKA.
5/38

¡ Semiconductor
MCKSL
Master clock selection input.
Set MCKSL to logic “0” when the master clock frequency is 9.6 MHz, and to logic “1” when it is 19.2
MHz.
PCMPCO
PCM data output of the PCM CODEC.
PCM is output from MSB, synchronizing with the rising edge of BCLKP and SYNCP. This pin is in
a high impedance state except during 8-bit PCM output. (It is also in a high impedance state during
power-down mode.) A pull-up resistor must be connected to this pin because its output is configured
as an open drain.
PCMPCI
PCM data input of the PCM CODEC.
PCM is shifted in at the falling edge of the BCLKP signal. The start of the PCM data (MSB) is
identified at the rising edge of SYNCP.
MSM7718-01
PCMADO
PCM data output of the ADPCM transcoder.
PCM is the output data after ADPCM decoder processing and is serially output from MSB in
synchronization with the rising edge of BCLKP and SYNCP. However, this signal timing can be
controlled at PCM multiplexing by the control register CR1-B5.
(The time slot 1 or 2 can be selected. Refer to Figs. 2-4.)
This pin is in a high impedance state except during 8-bit PCM output. (It is also in an high impedance
state during power-down mode.) A pull-up resistor must be connected to this pin because its output
is configured as an open drain.
PCMADI
PCM data input of the ADPCM transcoder.
PCM is shifted in at a falling edge of the BCLKP signal and input from MSB. The start of the PCM
data (MSB) is identified at the rising edge of SYNCP. However, this signal timing can be controlled at PC M
multiplexing by the control register CR1-B5.
(The time slot 1 or 2 can be selected. Refer to Figs. 2-4.)
PCMLNO
PCM receive data output of the line echo canceler.
PCM is output from MSB in a sequential order, synchronizing with the rising edge of BCLKP and
SYNCP. However, this signal timing can be controlled at PCM multiplexing by the control
register CR2-B3 to B5.
(The time slot of 1 to 7 can be selected. Refer to Figs. 2-4.)
This pin is in a high impedance state except during 8-bit PCM output. (It is also in a high impedance
state during power-down mode.) A pull-up resistor must be connected to this pin because its output
is configured as an open drain.
6/38
¡ Semiconductor
MSM7718-01
PCMLNI
PCM transmit data input of the line echo canceler.
PCM is shifted in at a falling edge of the BCLKP signal and input from MSB. The start of the PCM
data
(MSB) is identified at the rising edge of SYNCP. However, this signal timing can be controlled
at PCM
mutiplexing by the control register CR2-B3 to B5.
(One of the time slots 1 to 7 can be selected. Refer to Figs. 2-4.)
PCMACO
PCM transmit data output of the line echo canceler.
PCM is output from MSB in a sequential order, synchronizing with the rising edge of BCLKP and
SYNCP. However, this signal timing can be controlled at PCM multiplexing by the control
register CR2-B0 to B2. (The time slot 1 to 7 can be selected. Refer to Figs. 2 - 4.)
This pin is in a high impedance state except during 8-bit PCM output.
(It is also in a high impedance sate during power down mode.) A pull-up resistor must be connected
to this pin because its output is configured as an open drain.
PCMACI
PCM receive data input of the line echo canceler.
PCM is shifted in at a falling edge of BCLKP and input from MSB.
The start of the PCM data (MSB) is identified at the rising edge of SYNCP. However, this signal
timing can be controlled at PCM multiplexing by the control register CR2-B0 to B2. (One of the time
slots 1 to 7 can be selected. Refer to Figs. 2-4.)
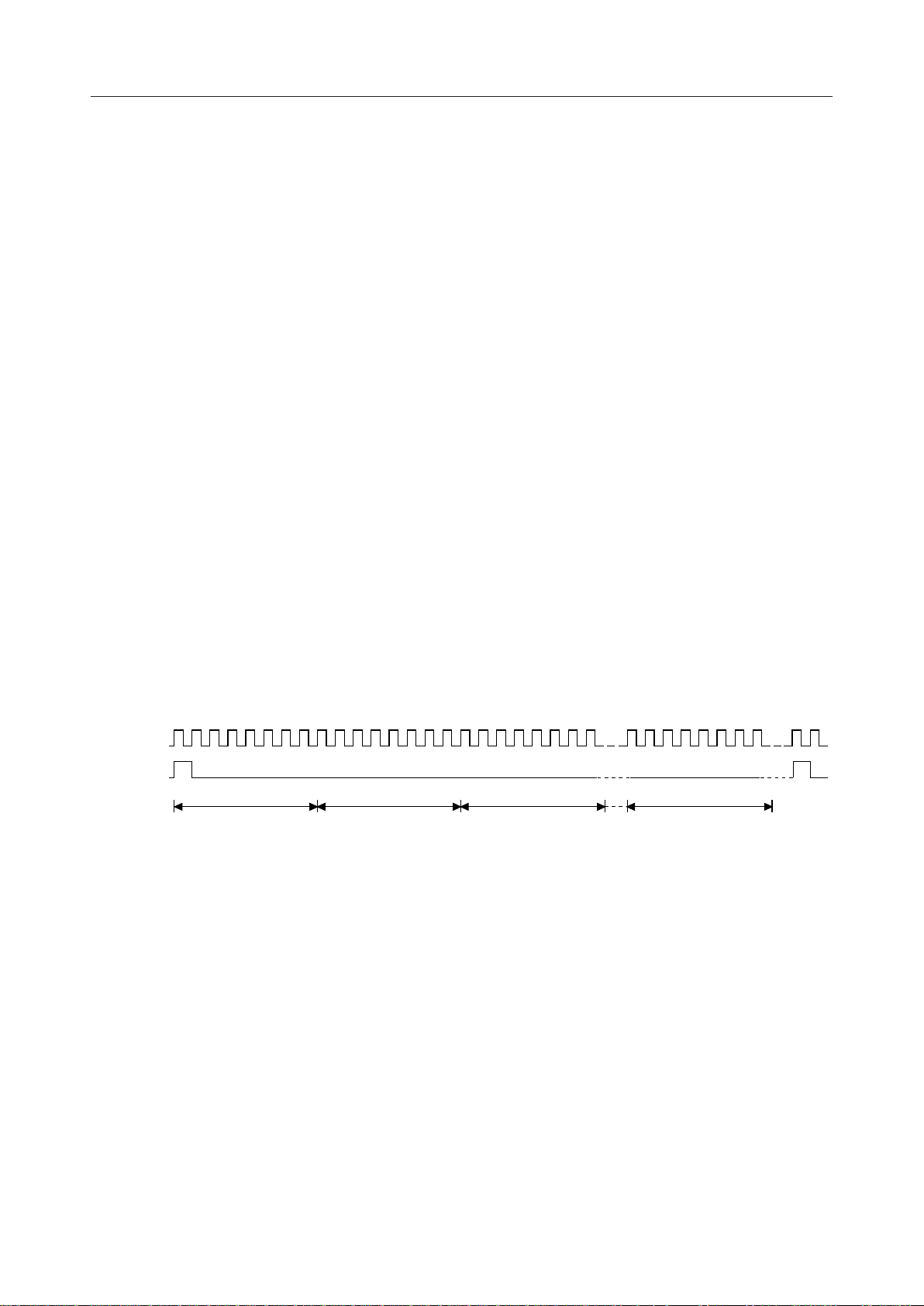
BCLKP
SYNCP
PCM
Multiple
time slot 1 time slot 2 time slot 3 time slot 7
Note : The PCM signals (PCMPCI and PCMPCO) of the PCM CODEC are always assigned to time
slot 1.
The PCM signals (PCMADI and PCMADO) of the ADPCM transcoder can be assigned to
time slot 1 or 2.
The PCM signals (PCMLNI, PCMLNO, PCMACI, PCMACO) of the line echo canceler can
be assigned to one of the time slots 1 to 7. (Multiple timing is controlled by CR1 and CR2.)
Figure 2 PCM Multiple Timing
7/38
¡ Semiconductor
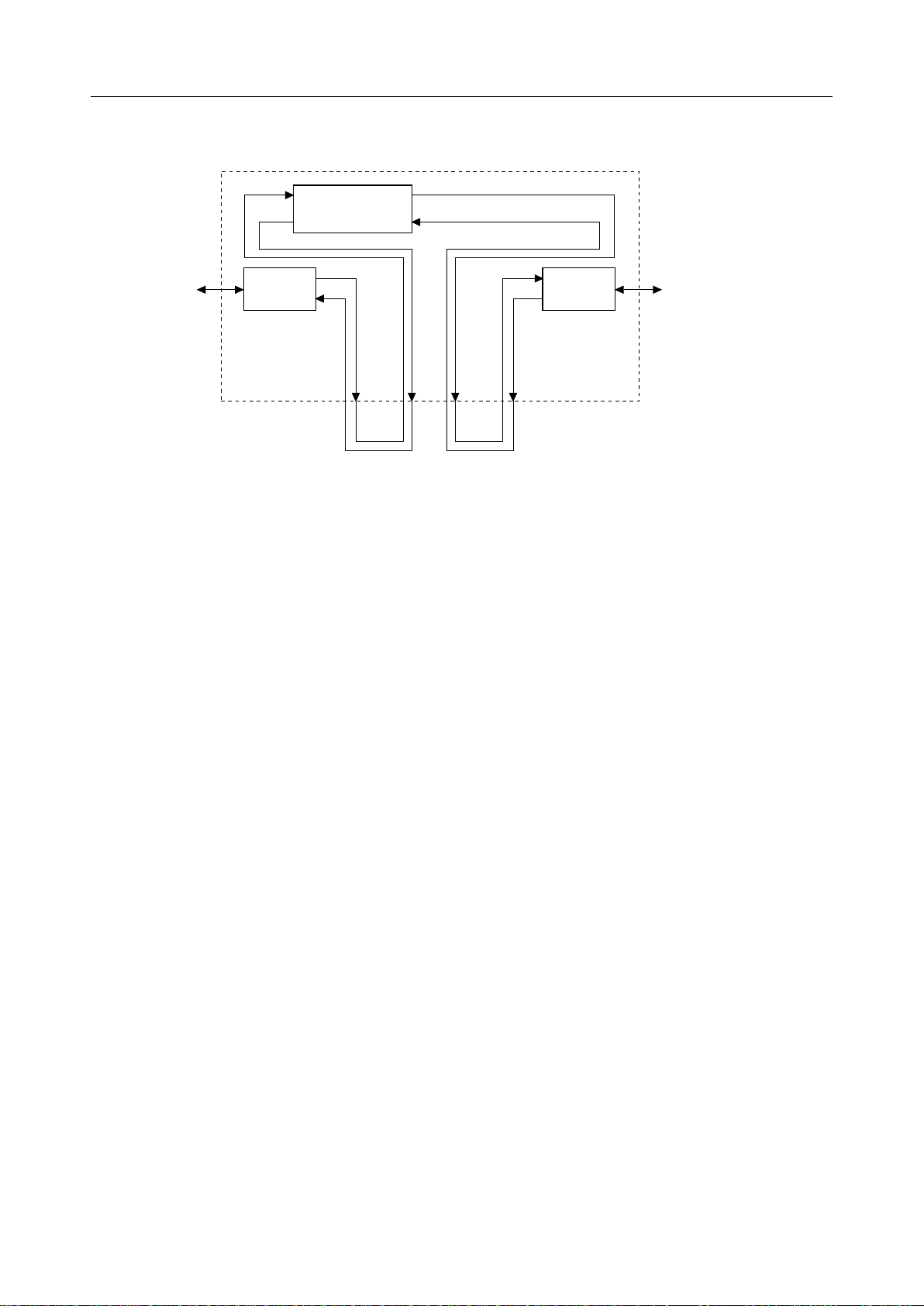
MSM7718
MSM7718-01
Line Echo
Canceler
Line Slave telephone
PCM
CODEC
PCMPCO
PCMPCI
PCMLNI
PCMLNO
PCMACI
PCMACO
PCMADI
ADPCM
Transcoder
PCMADO
Note : In this connection, PCMLNI, PCMLNO, PCMACI, and PCMACO should all be assigned
to time slot 1 for their output timing (the output timing for the PCM CODEC is always
assigned to time slot 1).
Turn on the line echo canceler and establish a route between the slave telephone and the
line.
Figure 3 PCM Signal Connection Example 1
8/38
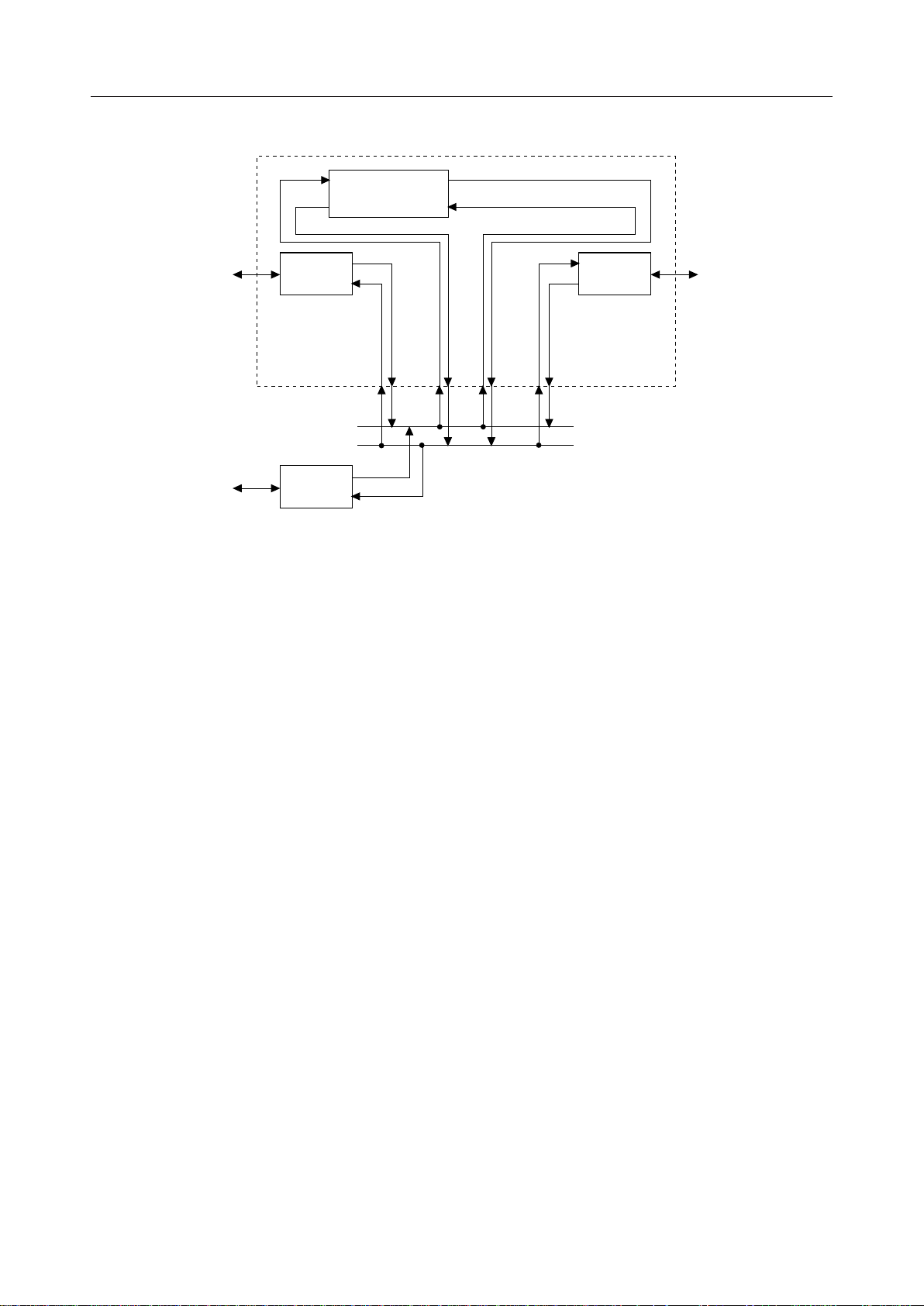
¡ Semiconductor
MSM7718
MSM7718-01
Line Echo
Canceler
Line Slave telephone
Microphone
and speaker
of the master
telephone
PCM
CODEC
PCM
CODEC
PCMPCO
PCMPCI
PCMLNI
PCMLNO
PCMACI
PCMACO
PCMADI
ADPCM
CODEC
PCMADO
Notes : The PCM signals of the ADPCM transcoder are assigned to time slot 2. (The PCM signals
of the PCM CODEC are always assigned to time slot 1.) The PCM signals of an external
PCM CODEC are assigned to time slot 3.
Route between the line and the slave telephone
PCMLNI and PCMLNO are assigned to time slot 1 and PCMACI and PCMACO are
assigned to time slot 2.
Turn on the line echo canceler, and establish the route between the line and the slave
telephone.
Route between the master telephone's microphone/speaker (handsfree) and the slave
telephone
PCMLNI and PCMLNO are assigned to time slot 3 and PCMACI and PCMACO are
assigned to time slot 2.
Turn on the line echo canceler, and establish the
speaker of the master telephone and the
slave telephone.
route between the microphone/
Route between the line and the master telephone's microphone/speaker (handsfree)
PCMLNI and PCMLNO are assigned to time slot 1 and PCMACI and PCMACO are
assigned to time slot 3.
Put the line echo canceler into “through mode”, and establish the route between
the line and the microphone/speaker of the master telephone.
Various routing can be implemented providing extension of external PCM CODECs.
Figure 4 PCM Signal Connection Example 2
9/38

¡ Semiconductor
BCLKP
Shift clock input for the PCM data (PCMPCO, PCMPCI, PCMADO, PCMADI, PCMLNO, PCMLNI,
PCMACO, PCMACI). The frequency is set in the range of 64 kHz to 2048 kHz.
This signal must be synchronized with the SYNCP signal. (Refer to Fig. 2.)
SYNCP
8 kHz synchronous signal input for transmit and receive PCM data.
This signal must be synchronized with the BCLKP signal. (Refer to Fig. 2.)
IS
Transmit ADPCM data output.
This data is the output data after ADPCM encoding, and is serially output from MSB in synchronization with the rising edge of BCLKA and SYNCA. This pin is an open drain output which remains
in a high impedance state during power-down, and requires a pull-up resistor.
MSM7718-01
IR
Receive ADPCM data input.
ADPCM is shifted in on the rising edge of BCLKA in synchronization with SYNCA and input
orderly from MSB.
BCLKA
Shift clock input for the ADPCM data (IS, IR).
The frequency is from 64 kHz to 2048 kHz.
This signal must be synchronized with the SYNCA signal.
SYNCA
8 kHz synchronous signal input for transmit and receive ADPCM data.
Synchronize this data with BCLKA signal. SYNCA is used for indicating the MSB of the serial
ADPCM data stream.
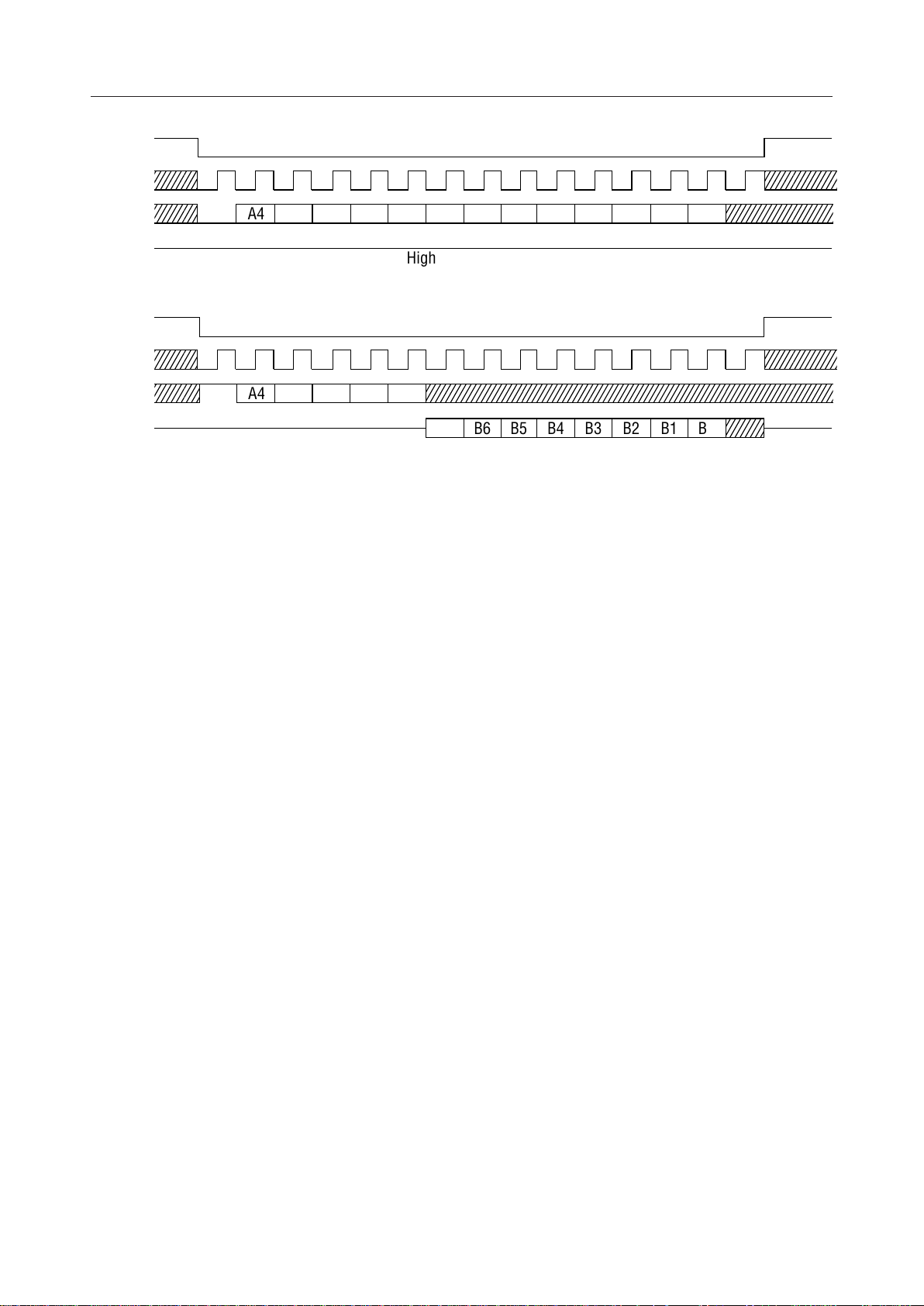
DEN, EXCK, DIN, DOUT, INT
Serial control ports for MCU interface.
Reading and writing data is performed by an external MCU through these pins. 17-byte control
registers are provided in this device.
DEN is the “Enable” control signal input, EXCK is the data shift clock input, DIN is the address and
data input, and DOUT is the data output.
Input/output timing is shown in Fig. 5.
INT goes to logic “0” when any change has been found in the tone detection results in the tone
detection mode (change in the control register bits CR7-B3, B2), and goes to logic “1” when the data
of control register CR7 is read out.
10/38
¡ Semiconductor
,
DEN
EXCK
MSM7718-01
DIN
DOUT
DEN
EXCK
DIN
DOUT
W
A4
A4
R A2A1A0
High Impedance
A3
A3
A2
A1 A0 B7 B6 B5 B4 B3 B2 B1 B0
High Impedance
(a) Data Write Timing
B6 B5 B4 B3 B2 B1 B0
B7
(b) Data Read Timing
Figure 5 MCU Interface Input/Output Timing
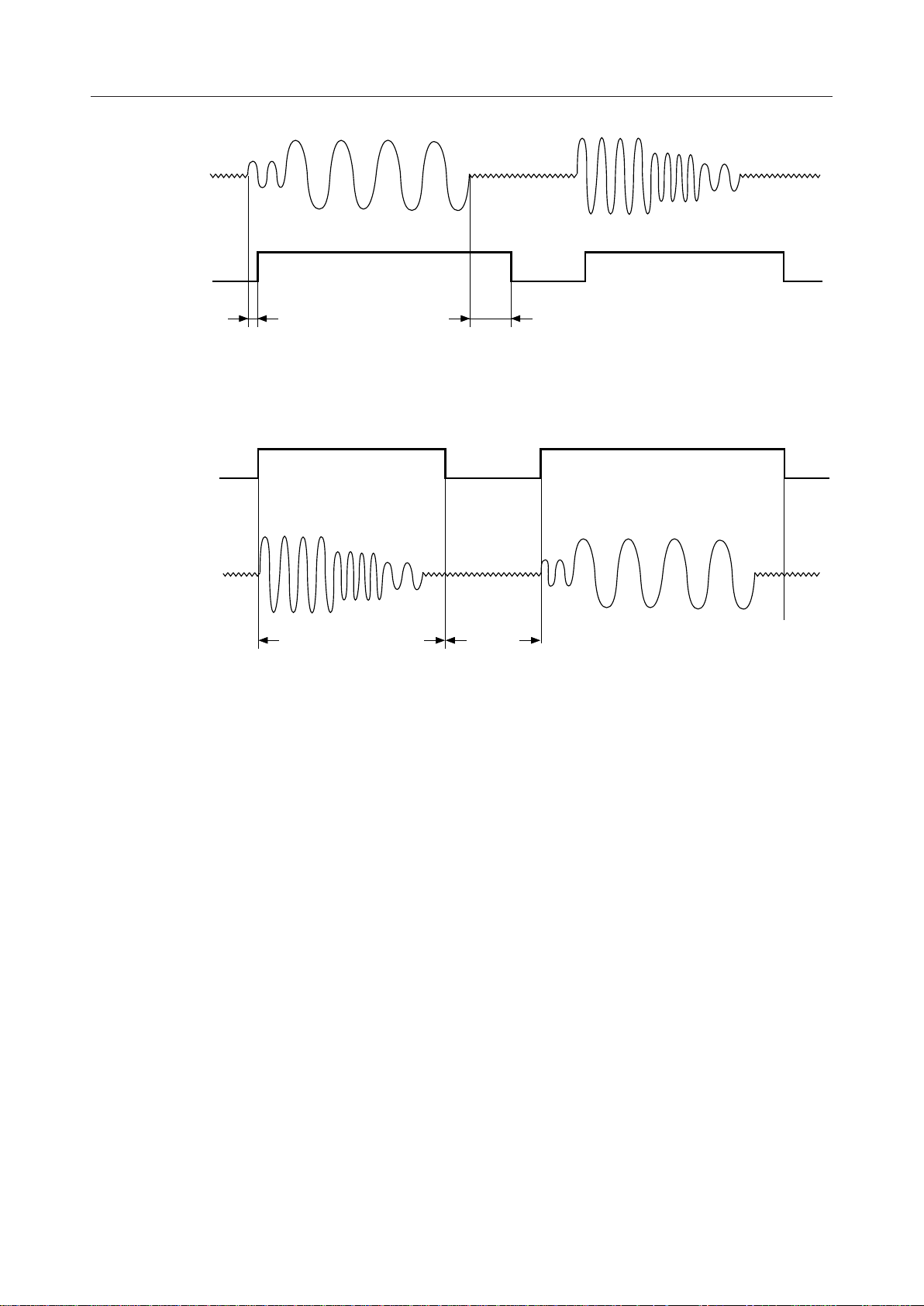
VOXO
Signal output for transmit VOX function.
The VOX function recognizes the presence or absence of the transmit voice signal by detecting the
level of the transmit signal to the line echo canceler . “1” and “0” levels set to this pin correspond
to the presence and the absence of voice, respectively. This result appears also at the register data
CR7-B7. The signal energy detect threshold is set by the control register data CR6-B6, B5.
The timiging diagram of the VOX function is shown in Fig 6.
The transmit signal to the line echo canceler refers to the signal input to the PCMLNI pin.
VOXI
Signal input for receive VOX function.
The “1” level at VOXI indicates the presence of a voice signal, the decoder block processes normal
receive signal, and the voice signal on the PCMACI pin goes through. The “0” level indicates the
absence of a voice signal and the background noise generated in this device is output to the line echo
canceler.
The background noise amplitude is set by the control register CR6.
Because this signal is ORed with the register data CR6-B3, set the control register data CR6-B3 to logic
“0”.
11/38
¡ Semiconductor
g
Voice Input
GSX2
MSM7718-01
Silence
VOXO
T
VXON
Voice
Detect
Voice
T
VXOFF
Silence
Detect (Hangover time)
(a) Transmit VOX Function Timing Diagram (for Analog Input)
Silence
VOXI
Voice Output
VFRO
Normal Voice Signal
Decoded Time Period
(b) Receive VOX Function (CR6-B3: lo
Voice
Background
Noise
ic “0”) Timing Diagram (for Analog Input)
Voice
Voice
Note: The VOX function is valid when CR6-B7 is set to logic “1”.
Figure 6 VOX Function
MUTE
This pin is used to enable the receive side voice path mute level.
To set the mute level, set this pin to “1”.
MLV0, MLV1, MLV2
These pins are used to set the receive side voice path mute level.
For the control method, refer to the control register description (CR1). Since these pins are ORed
with CR1-B2, B1, and B0 internally, set the bits of the register to “0“ before using this pin.
12/38
 Loading...
Loading...