

Page 1

56F803
Evaluation Module User Manual
56F800
16-bit Digital Signal Controllers
DSP56F803EVMUM
Rev. 5
07/2005
freescale.com
Page 2

Page 3

TABLE OF CONTENTS
Preface vii
Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Suggested Reading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
Notation Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
Definitions, Acronyms, and Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ix
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . x
Chapter 1
Introduction
1.1 56F803EVM Architecture. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1.2 56F803EVM Configuration Jumpers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1.3 56F803EVM Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Chapter 2
Technical Summary
2.1 56F803. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.2 Program and Data Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2.3 RS-232 Serial Communications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2.4 Clock Source . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.5 Operating Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2.6 Debug LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.7 Debug Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.7.1 JTAG Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2.7.2 Parallel JTAG Interface Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2.8 External Interrupts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-10
2.9 Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2.10 Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2.11 UNI-3 Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-12
2.12 Run/Stop Switch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
2.13 Motor Control PWM Signals and LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
2.14 Motor Protection Logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
2.14.1 UNI-3 Motor Protection Logic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-15
2.15 Back-EMF and Motor Phase Current Sensing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-16
Freescale Semiconductor i
Table of Contents, Rev. 5
Page 4

2.16 Quadrature Encoder/Hall-Effect Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-17
2.17 Zero-Crossing Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-17
2.18 CAN Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-18
2.19 Peripheral Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-19
2.19.1 External Memory Control Signal Expansion Connector . . . . . . . . . . . . . . . . . . . . . 2-20
2.19.2 Encoder/Timer Channel Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-20
2.19.3 Timer Channel Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-21
2.19.4 Address Bus Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-21
2.19.5 Data Bus Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-22
2.19.6 A/D Port Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
2.19.7 Serial Communications Port Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . 2-23
2.19.8 Serial Peripheral Interface Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . 2-24
2.19.9 CAN Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-24
2.19.10 PWM Port Expansion Connector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-25
2.20 Test Points. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-25
Appendix A
56F803EVM Schematics
Appendix B
56F803EVM Bill of Material
ii Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 5

LIST OF FIGURES
1-1 Block Diagram of the 56F803EVM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-2 56F803EVM Jumper Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
1-3 Connecting the 56F803EVM Cables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
2-1 Schematic Diagram of the External Memory Interface. . . . . . . . . . . . . . . . . . . . . . . 2-4
2-2 Schematic Diagram of the RS-232 Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2-3 Schematic Diagram of the Clock Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2-4 Schematic Diagram of the Debug LED Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
2-5 Block Diagram of the Parallel JTAG Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2-6 Schematic Diagram of the User Interrupt Interface. . . . . . . . . . . . . . . . . . . . . . . . . 2-10
2-7 Schematic Diagram of the RESET Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2-8 Schematic Diagram of the Power Supply . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-11
2-9 Run/Stop Switch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-13
2-10 PWM Group Interface and LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-14
2-11 DC Bus Over-Voltage and Over-Current Detection Schematic Diagram . . . . . . . . 2-15
2-12 Primary Back-EMF or Motor Phase Current Sense Signals . . . . . . . . . . . . . . . . . . 2-16
2-13 Zero-Crossing Encoder Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-17
2-14 CAN Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-18
A-1 56F803 Processor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-2
A-2 Reset, Mode, Clock & IRQsL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-3
A-3 Program & Data SRAM Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-4
A-4 RS-232 and SCI Connectors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-5
A-5 56F803 PWM LEDs and User LED . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-6
A-6 UNI-3 Over-Voltage and Current Sense . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-7
A-7 Zero-Crossing/ Encoder or Hall-Effect Selection . . . . . . . . . . . . . . . . . . . . . . . . A-8
A-8 High Speed CAN Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-9
A-9 Port Timer D, Address, Data, A/D and Control Line Connectors . . . . . . . . . . . A-10
A-10 UNI-3 Interface and General Purpose Switches . . . . . . . . . . . . . . . . . . . . . . . . A-11
Freescale Semiconductor iii
List of Figures, Rev. 5
Page 6

A-11 Back-EMF and Phase Current Sense Analog Input Selectors . . . . . . . . . . . . . . A-12
A-12 Parallel JTAG Host/Target Interface and JTAG Connector . . . . . . . . . . . . . . . A-13
A-13 Power Supplies 3.3V and 5.0V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-14
A-14 Bypass Capacitors and Spare Gates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-15
iv Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 7

LIST OF TABLES
1-1 56F803EVM Default Jumper Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3
2-1 RS-232 Serial Connector Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2-2 Operating Mode Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
2-3 JTAG Connector Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8
2-4 Parallel JTAG Interface Disable Jumper Selection . . . . . . . . . . . . . . . . . . . . . . . 2-8
2-5 Parallel JTAG Interface Connector Description . . . . . . . . . . . . . . . . . . . . . . . . . 2-9
2-6 On-Board Host Target Interface Power Source Jumper Selection . . . . . . . . . . 2-10
2-7 UNI-3 Connector Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-12
2-8 CAN Header Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-19
2-9 External Memory Control Signal Connector Description . . . . . . . . . . . . . . . . . 2-20
2-10 Timer Connector Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-20
2-11 Timer D Connector Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-21
2-12 External Memory Address Bus Connector Description. . . . . . . . . . . . . . . . . . . 2-21
2-13 External Memory Address Bus Connector Description. . . . . . . . . . . . . . . . . . . 2-22
2-14 A/D Connector Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
2-15 SCI Connector Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-23
2-16 SPI Connector Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-24
2-17 CAN Connector Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-24
2-18 PWM Port Connector Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-25
Freescale Semiconductor v
List of Tables, Rev. 5
Page 8
vi Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 9

Preface
This reference manual describes in detail the hardware on the 56F803 Evaluation Module.
Audience
This document is intended for application developers who are creating software for
devices using the Freescale 56F803 part.
Organization
This manual is organized into two chapters and two appendixes.
• Chapter 1, Introduction - provides an overview of the 56F803EVM and its
features.
• Chapter 2, Technical Summary - describes in detail the 56F803EVM hardware.
• Appendix A, 56F803EVM Schematics - contains the schematics of the
56F803EVM.
• Appendix B, 56F803EVM Bill of Material - provides a list of the materials used
on the 56F803EVM board.
Suggested Reading
More documentation on the 56F803 and the 56F803EVM kit may be found at the URL:
Freescale Semiconductor vii
http://www.freescale.com
Preface, Rev. 5
Page 10
Notation Conventions
This document uses the following conventions:
Term or Value Symbol Examples Exceptions
Active High Signals
(Logic One)
Active Low Signals
(Logic Zero)
Hexadecimal Values Begin with a “$”
Decimal Values No special symbol
Binary Values Begin with the letter
Numbers Considered positive
Bold Reference sources,
No special symbol
attached to the signal name
Noted with an
overbar in text and in
most figures
symbol
attached to the
number
“b” attached to the
number
unless specifically
noted as a negative
value
paths, emphasis
A0
CLKO
WE
OE
$0FF0
$80
10
34
b1010
b0011
5
-10
...see:
www.freescale.com
In schematic drawings,
Active Low Signals may
be noted by a backslash:
/WE
Voltage is often shown
as positive: +3.3V
...
viii Freescale Semiconductor
DSP56F801EVM User Manual, Rev. 5
Page 11

Definitions, Acronyms, and Abbreviations
Definitions, acronyms and abbreviations for terms used in this document are defined below for
reference.
A/D
CAN
CiA
EVM
GPIO
IC
JTAG
LQFP
MPIO
OnCE
PCB
PLL
TM
Analog-to-Digital
Controller Area Network; serial communications peripheral and method
CAN in Automation, an international CAN user’s group that coordinates
standards for CAN communications protocols
Evaluation Module
General Purpose Input and Output Port
Integrated Circuit
Joint Test Action Group, a bus protocol/interface used for test and debug
Low-profile Quad Flat Pack
Multi Purpose Input and Output Port; shares package pins with other
peripherals on the chip and can function as a GPIO
On-Chip Emulation, a debug bus and port created by Freescale to enable
designers to create a low-cost hardware interface for a professional
quality debug environment
Printed Circuit Board
Phase Locked Loop
PWM
RAM
ROM
SCI
SPI
Pulse Width Modulation
Random Access Memory
Read Only Memory
Serial Communications Interface
Serial Peripheral Interface Port
SRAM Static Random Access Memory
UART
Freescale Semiconductor ix
Universal Asynchronous Receiver/Transmitter
Preface, Rev. 5
Page 12

References
The following sources were referenced to produce this manual:
[1] DSP56800 Family Manual, Freescale Semiconductor, DSP56800FM
[2] DSP56F801/803/805/807 User’s Manual, Freescale Semiconductor,
DSP56F801-7UM
[3] 56F803 Technical Data, Freescale Semiconductor, DSP56F803
[4] CiA Draft Recommendation DR-303-1, Cabling and Connector Pin Assignment,
Version 1.0, CAN in Automation
[5] CAN Specification 2.0B, BOSCH or CAN in Automation
x Freescale Semiconductor
DSP56F801EVM User Manual, Rev. 5
Page 13

Chapter 1
Introduction
The 56F803EVM is used to demonstrate the abilities of the 56F803 and to provide a hardware
tool allowing the development of applications that use the 56F803.
The 56F803EVM is an evaluation module board that includes a 56F803 part, peripheral
expansion connectors, external memory, RS-232 interface and a CAN interface. The expansion
connectors are for signal monitoring and user feature expandability.
The 56F803EVM is designed for the following purposes:
• Allowing new users to become familiar with the features of the 56800 architecture. The
tools and examples provided with the 56F803EVM facilitate evaluation of the feature set
and the benefits of the family.
• Serving as a platform for real-time software development. The tool suite enables the user
to develop and simulate routines, download the software to on-chip or on-board RAM, run
TM
it, and debug it using a debugger via the JTAG/OnCE
the OnCE port enable the user to easily specify complex break conditions and to execute
user-developed software at full-speed, until the break conditions are satisfied. The ability
to examine and modify all user accessible registers, memory and peripherals through the
OnCE port greatly facilitates the task of the developer.
port. The breakpoint features of
• Serving as a platform for hardware development. The hardware platform enables the user
to connect external hardware peripherals. The on-board peripherals can be disabled,
providing the user with the ability to reassign any and all of the controller’s peripherals.
The OnCE port's unobtrusive design means that all of the memory on the board and on the
chip are available to the user.
Freescale Semiconductor 1-1
Introduction, Rev. 5
Page 14
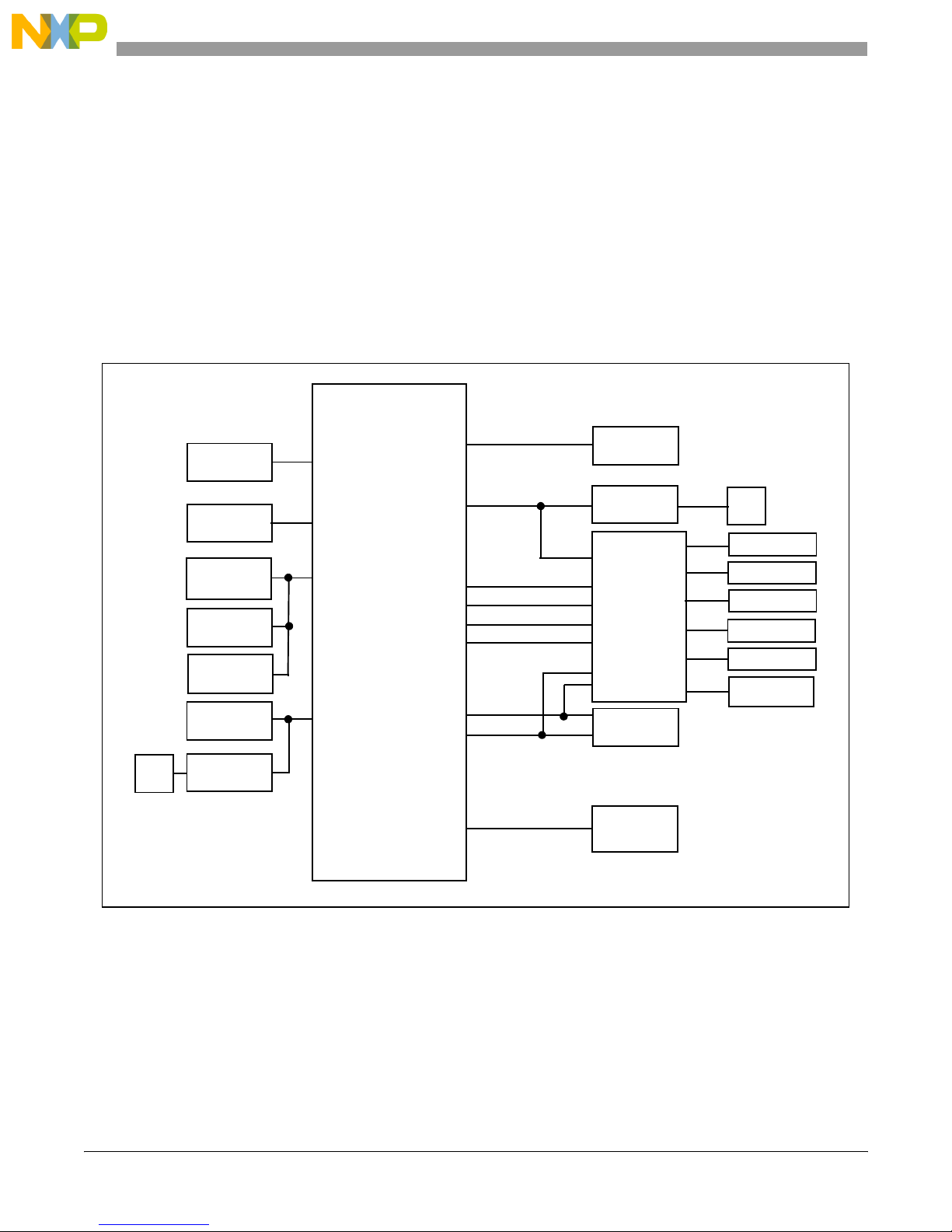
1.1 56F803EVM Architecture
The 56F803EVM facilitates the evaluation of various features present in the 56F803 part. The
56F803EVM can be used to develop real-time software and hardware products based on the
56F803. The 56F803EVM provides the features necessary for a user to write and debug
software, demonstrate the functionality of that software and interface with the customer's
application-specific device(s). The 56F803EVM is flexible enough to allow a user to fully
exploit the 56F803's features to optimize the performance of their product, as shown in
Figure 1-1.
56F803
Low Freq
Crystal
RESET
LOGIC
XTAL/EXTAL
RESET
DSub
25-Pin
MODE / IRQ
LOGIC
Program
Memory
64Kx16-bit
Data Memory
64Kx16-bit
Memory
Expansion
Connector(s)
JTAG
Connector
Parallel
JTAG Interface
RS-232
Interface
Peripheral
Expansion
Connector(s)
UNI-3
Power Supply
3.3V, 5V &
3.3VA
MODE / IRQ
Address,
Data &
Control
JTAG / OnCE
SCI
SPI
CAN
TIMER
GPIO
PWM
A / D
3.3 V & GND
Figure 1-1. Block Diagram of the 56F803EVM
DSub
9-Pin
CAN Interface
Debug LEDs
PWM LEDs
Over V Sense
Over I Sense
Zero Crossing
Detect
1-2 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 15
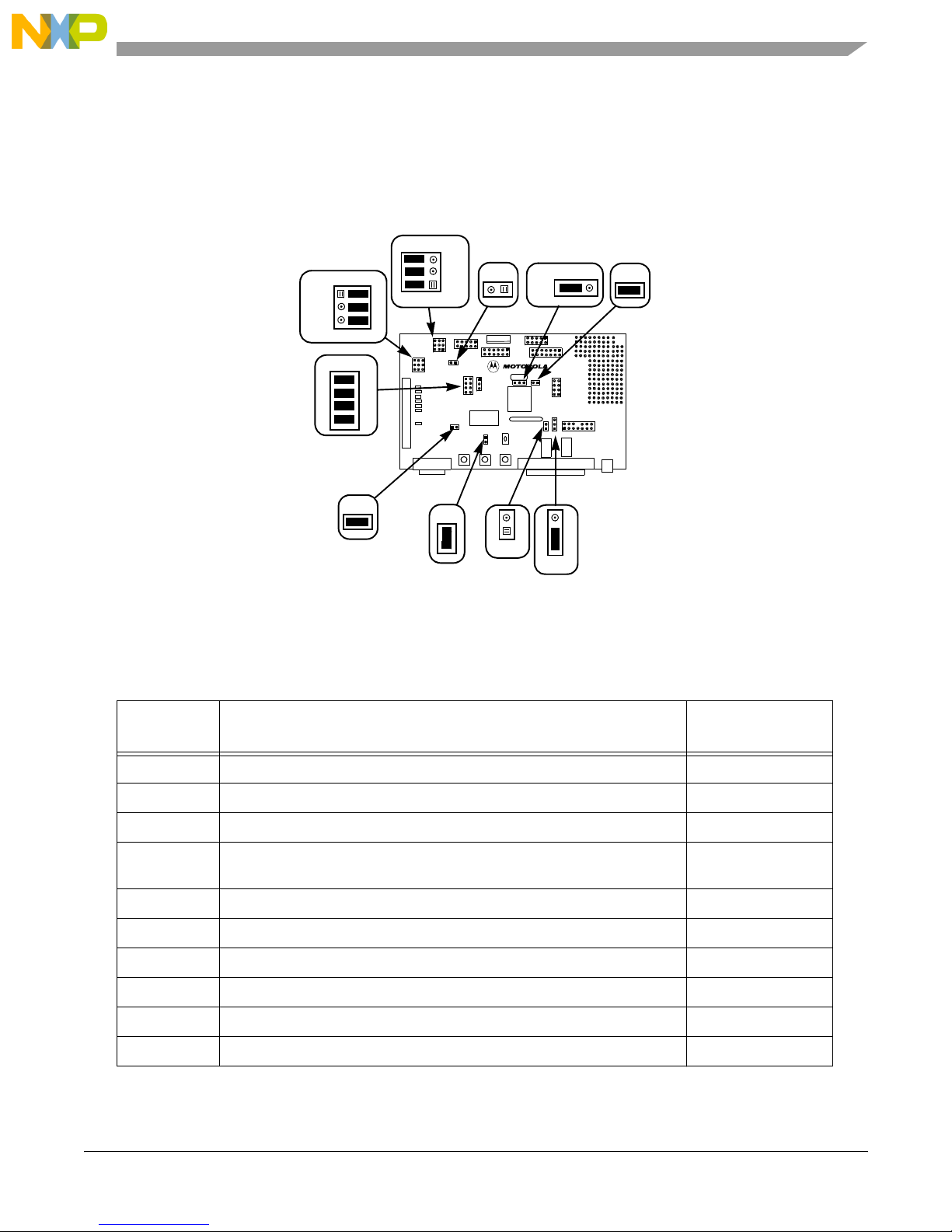
56F803EVM Configuration Jumpers
1.2 56F803EVM Configuration Jumpers
Ten jumper groups, (JG1-JG10), shown in Figure 1-2, are used to configure various
features on the 56F803EVM board. Table 1-1 describes the default jumper group settings.
7
8
9
1
J9
JG9
JG2
U6
J4
DSP56F803EVM
1
JG4
JTAG
JG8
J1
U7
3
JG9
P3
JG6
2
1
3
3
12
JG6
P1
1
738
USER LED
789
2
9
PWM LEDs
LED3
9
7
8
JG1
1
2
7
8
JG7
JG7
132
JG5
P4
JG10
JG3
J3
J2
JG10
JG1
1
S2
J8
J10
Y1
1
JG3
1
U1
U15
S/N
S1
JG4
RUN/STOP
S4
S3
P2
IRQBIRQA
RESET
JG5
JG4
JG2
JG8
Figure 1-2. 56F803EVM Jumper Reference
Table 1-1. 56F803EVM Default Jumper Options
Jumper
Group
Comment
JG1 UNI-3 serial selected 1–2, 3–4, 5–6 & 7–8
JG2 Enable on-board Parallel JTAG Command Converter Interface NC
JG3 Use on-board crystal for oscillator input 1–2
JG4 Selects device’s Mode 0, BOOT From FLASH, operation upon exit from
reset
JG5 Enable external SRAM 1–2
JG6 UNI-3 3-Phase Current Source Selected 2–3, 5–6 & 8–9
Jumpers
Connections
1–2
JG7 Encoder Input Selected 2–3, 5–6 & 8–9
JG8 On-board Parallel JTAG Command Converter powered by Host System 1-2
JG9 Use on-board crystal for oscillator input 1–2
JG10 Leave CAN bus un-terminated NC
Freescale Semiconductor 1-3
Introduction, Rev. 5
Page 16
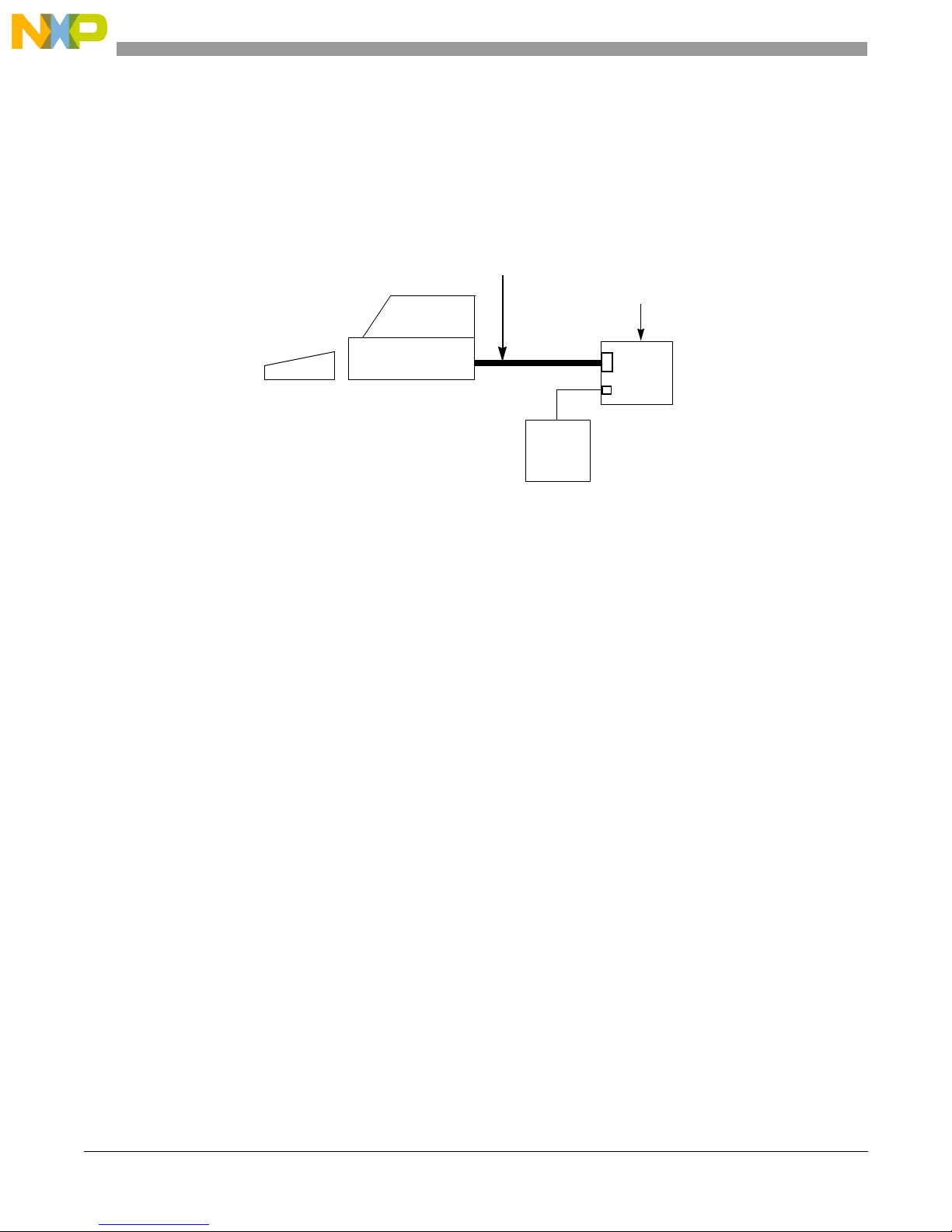
1.3 56F803EVM Connections
An interconnection diagram is shown in Figure 1-3 for connecting the PC and the external +12V
DC power supply to the 56F803EVM board.
Parallel Extension
Cable
56F803EVM
PC-compatible
Computer
P2
Connect cable
to Parallel/Printer port
External
+12V
Power
P3
with 2.1mm,
receptacle
connector
Figure 1-3. Connecting the 56F803EVM Cables
Perform the following steps to connect the 56F803EVM cables:
1. Connect the parallel extension cable to the Parallel port of the host computer.
2. Connect the other end of the parallel extension cable to P2, shown in Figure 1-3, on the
56F803EVM board. This provides the connection which allows the host computer to
control the board.
3. Make sure that the external +12V DC, 4.0A power supply is not plugged into a +120V AC
power source.
4. Connect the 2.1mm output power plug from the external power supply into P3, shown in
Figure 1-3, on the 56F803EVM board.
5. Apply power to the external power supply. The green Power-On LED will illuminate
when power is correctly applied.
1-4 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 17

Chapter 2
Technical Summary
The 56F803EVM is designed as a versatile controller development card for developing real-time
software and hardware products to support a new generation of applications in digital and
wireless messaging, servo and motor control, digital answering machines, feature phones,
modems, and digital cameras. The power of the 16-bit 56F803 controller, combined with the
on-board 64K u16-bit external program Static RAM (SRAM), 64K u16-bit external data
SRAM, CAN interface, Hall-Effect/Quadrature Encoder interface, motor zero crossing logic,
motor bus over-current logic, motor bus over-voltage logic and parallel JTAG interface, makes
the 56F803EVM ideal for developing and implementing many motor controlling algorithms, as
well as for learning the architecture and instruction set of the 56F803 processor.
The main features of the 56F803EVM include:
• 56F803 16-bit +3.3V controller operating at 80MHz [U1]
• External fast Static RAM (FSRAM) memory [U2], configured as:
— 64Ku16-bit of Program memory with 0 wait states at 70MHz
— 64Ku16-bit of Data memory with 0 wait states at 70MHz
• 8.00MHz crystal oscillator for device frequency generation [Y1]
• Optional external oscillator frequency input connector [JG3 and JG9]
• Joint Test Action Group (JTAG) port interface connector for an external debug Host
Target Interface [J1]
• On-board Parallel JTAG Host Target Interface, with a connector for a PC printer port
cable [P2]
• RS-232 interface for easy connection to a host processor [U3 and P4]
• CAN interface for high speed, 1.0Mbps, communications [U15 and J3]
• CAN bypass and bus termination [J13 and JG10]
• Connector to allow the user to connect his own SCI / GPIO-compatible peripheral [J12]
• Connector to allow the user to connect his own SPI / MPIO-compatible peripheral [J6]
• Connector to allow the user to connect his own PWM / GPIO-compatible peripheral [J4]
• Connector to allow the user to connect his own CAN physical layer peripheral [J5]
• Connector to allow the user to connect his own Timer / MPIO-compatible peripheral [J10]
Freescale Semiconductor 2-1
Technical Summary, Rev. 5
Page 18

• Connector to allow the user to connect to the device’s A/D Port [J9]
• 56F803’s external memory expansion connectors [J7, J8 and J11]
• On-board power regulation from an external +12V DC-supplied power input [P3]
• Light Emitting Diode (LED) power indicator [LED1]
• Six on-board PWM monitoring LEDs [LED2-LED7]
• On-board real-time user debugging LED [LED8]
• UNI-3 Motor interface [P1]
— Encoder/Hall-Effect interface
— Over-Voltage sensing [U14]
— Over-Current sensing [U14]
— DC Bus Voltage sensing [U13]
— DC Bus Current sensing [U13]
— Back-EMF sensing
— Temperature sensing
— Zero Crossing detection
— Pulse Width Modulation
— Power Factor Correction (PFC) sensing
• Manual RESET push-button [S4]
• Manual interrupt push-button for IRQA
• Manual interrupt push-button for IRQB
[S2]
[S3]
• General purpose toggle switch for RUN/STOP control(AN7) [S1]
2.1 56F803
The 56F803EVM uses a Freescale DSP56F803BU80 part, designated as U1 on the board and in
the schematics. This part will operate at a maximum speed of 80MHz. A full description of the
56F803, including functionality and user information, is provided in the following documents:
• 56F803 Technical Data, (DSP56F803): Provides features list and specifications including
signal descriptions, DC power requirements, AC timing requirements and available
packaging.
2-2 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 19
56F803
• DSP56F801/803/805/807 User’s Manual, (DSP56F801-7UM): Provides an overview
description of the controller and detailed information about the on-chip components
including the memory and I/O maps, peripheral functionality, and control/status register
descriptions for each subsystem.
• DSP56800 Family Manual, (DSP56800FM): Provides a detailed description of the core
processor including internal status and control registers and a detailed description of the
family instruction set.
These manuals contain detailed information about chip functionality and operation and can be
found at this URL:
http://www.freescale.com
Freescale Semiconductor 2-3
Technical Summary, Rev. 5
Page 20
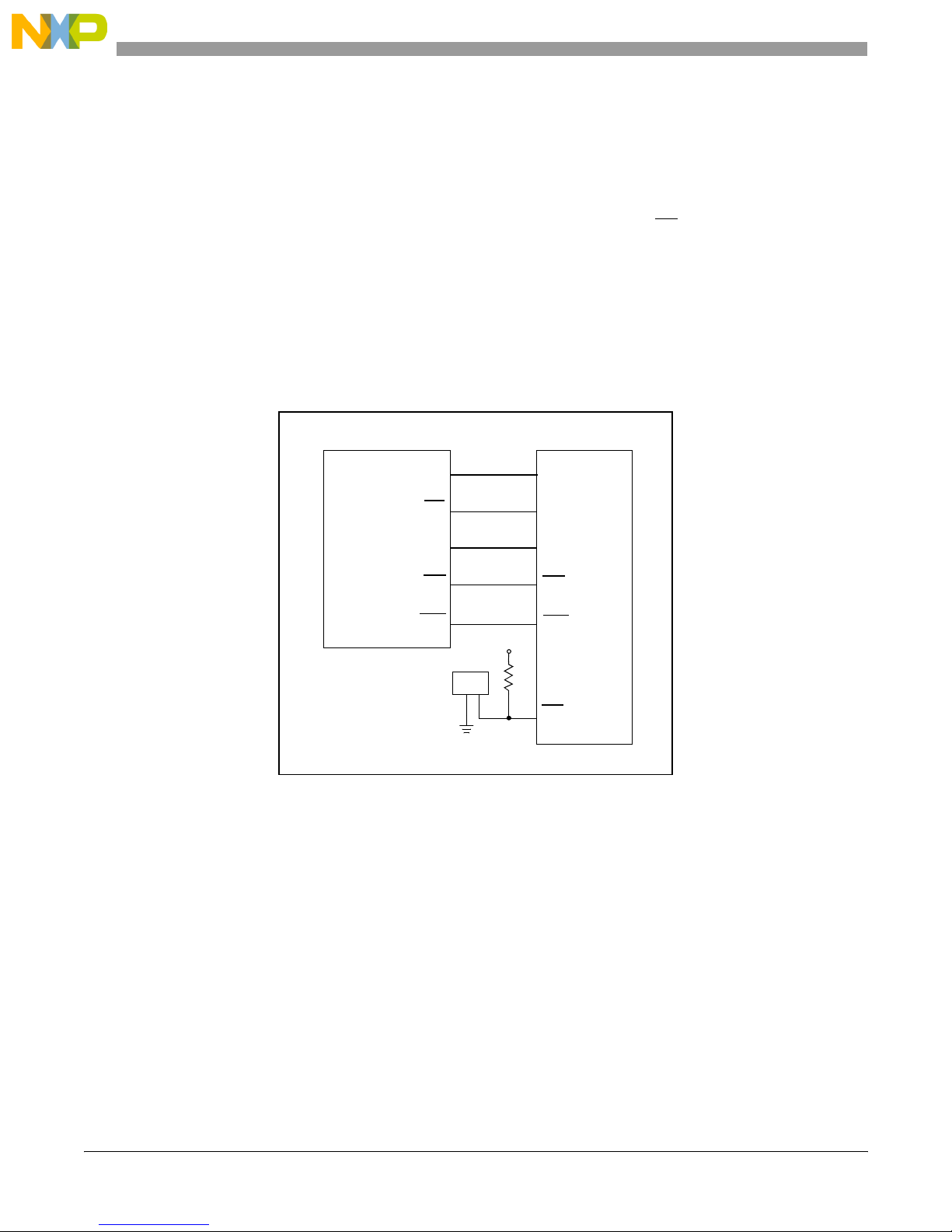
2.2 Program and Data Memory
The 56F803EVM uses one bank of 128Ku16-bit Fast Static RAM (GSI GS72116, labeled U2)
for external memory expansion; see the FSRAM schematic diagram in Figure 2-1. This physical
memory bank is split into two logical memory banks of 64Kx16-bits: one for Program memory
and the other for Data memory. By using the device’s program strobe, PS
the memory chip’s A0 signal line, half of the memory chip is selected when Program memory
accesses are requested and the other half of the memory chip is selected when Data memory
accesses are requested. This memory bank will operate with zero wait-state accesses while the
56F803 is running at 70MHz. However, when running at 80MHz, the memory bank operates
with four wait-state accesses. This memory bank can be disabled by removing the jumper at JG5.
, signal line along with
56F803
A0-A15
PS
D0-D15
RD
WR
Connect Pin 1-2:
Enable SRAM
Jumper Removed:
Disable SRAM
JG5
+3.3V
1
2
GS72116
A1-A16
A0
D0-D15
RD
WR
CS
Figure 2-1. Schematic Diagram of the External Memory Interface
2-4 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 21
RS-232 Serial Communications
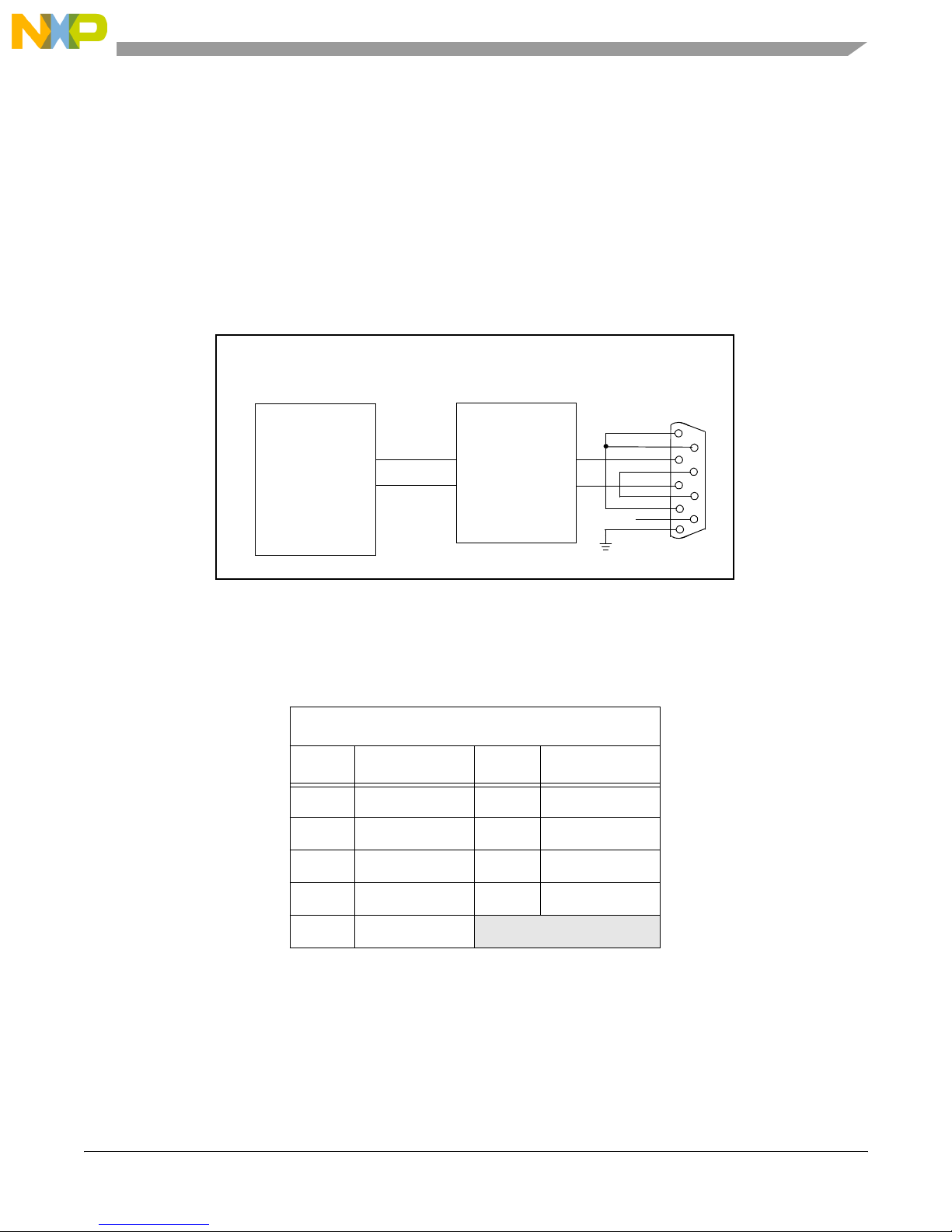
2.3 RS-232 Serial Communications
The 56F803EVM provides an RS-232 interface by the use of an RS-232 level converter,
(Analog Devices ADM3311EARS, designated as U3); refer to the RS-232 schematic
diagram in Figure 2-2. The RS-232 level converter transitions the SCI UART’s +3.3V
signal levels to RS-232 compatible signal levels and connects to the host’s serial port via
connector P4. Flow control is not provided, but could be implemented using uncommitted
GPIO signals. The pin-out of connector P4 is listed in Table 2-1.
RS-232
56F803
TXD0
RXD0 R1in
Level Interface
R1out
RS-232 DB9
1
6
T1outT1in
2
7
3
8
4
9
x
5
P4
Figure 2-2. Schematic Diagram of the RS-232 Interface
Table 2-1. RS-232 Serial Connector Description
P4
Pin # Signal Pin # Signal
1 Jumper to 6 & 4 6 Jumper to 1 & 4
2 TXD 7 Jumper to 8
3 RXD 8 Jumper to 7
4 Jumper to 1 & 6 9 N/C
5GND
Freescale Semiconductor 2-5
Technical Summary, Rev. 5
Page 22

2.4 Clock Source
The 56F803EVM uses an 8.00MHz crystal, Y1, connected to its External Crystal Inputs, EXTAL
and XTAL. The 56F803 uses its internal PLL to multiply the input frequency by 10 to achieve its
80MHz maximum operating frequency. An external oscillator source can be connected to the
controller by using the oscillator bypass connectors, JG3 and JG9; see Figure 2-3.
EXTERNAL
OSCILLATOR
HEADERS
8.00MHz
JG3
321
JG9
56F803
EXTAL
1
2
XTAL
Figure 2-3. Schematic Diagram of the Clock Interface
2.5 Operating Mode
The 56F803EVM provides a boot-up MODE selection jumper, JG4. This jumper is used to select
the operating mode of the controller as it exits RESET. Refer to the DSP56F801-7 User’s Manual
for a complete description of the chip’s operating modes. Table 2-2 shows the two operation
modes available on the 56F803.
Table 2-2. Operating Mode Selection
Operating Mode JG4 Comment
0 1–2 Bootstrap from internal memory (GND)
3 No Jumper Bootstrap from external memory (+3.3V)
2-6 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 23

Debug Support
2.6 Debug LED
An on-board Light-Emitting Diode, (LED), is provided to allow real-time debugging for user
programs. This LED allows the programmer to monitor program execution without having to
stop the program during debugging; refer to Figure 2-4. LED8 is controlled by the MOSI signal
line. Setting MOSI to a Logic One value will turn on the LED.
56F803
LED 8
BUFFERMOSI
GREEN LED
+3.3V
Figure 2-4. Schematic Diagram of the Debug LED Interface
2.7 Debug Support
The 56F803EVM provides an on-board Parallel JTAG Host Target Interface and a JTAG
interface connector for external Host Target Interface support. Two interface connectors are
provided to support each of these debugging approaches. These two connectors are designated
the JTAG connector and the Host Parallel Interface Connector.
2.7.1 JTAG Connector
The JTAG connector on the 56F803EVM allows the connection of an external Host Target
Interface for downloading programs and working with the 56F803’s registers. This connector is
used to communicate with an external Host Target Interface which passes information and data
back and forth with a host processor running a debugger program. Table 2-3 shows the pin-out
for this connector.
Freescale Semiconductor 2-7
Technical Summary, Rev. 5
Page 24

Table 2-3. JTAG Connector Description
J1
Pin # Signal Pin # Signal
1 TDI 2 GND
3 TDO 4 GND
5 TCK 6 GND
7 NC 8 KEY
9 RESET
11 +3.3V 12 NC
13 NC 14 TRST
10 TMS
When this connector is used with an external Host Target Interface, the parallel JTAG
interface should be disabled by placing a jumper in jumper block JG2. Reference
Table 2-4 for this jumper’s selection options.
Table 2-4. Parallel JTAG Interface Disable Jumper Selection
JG2 Comment
No jumper On-board Parallel JTAG Interface Enabled
1–2 Disable on-board Parallel JTAG Interface
2.7.2 Parallel JTAG Interface Connector
The Parallel JTAG Interface Connector, P2, allows the 56F803 to communicate with a
Parallel Printer Port on a Windows PC; see Figure 2-5. By using this connector, the user
can download programs and work with the 56F803’s registers. Table 2-5 shows the
pin-out for this connector. When using the parallel JTAG interface, the jumper at JG2
should be removed; refer to Table 2-4. A jumper, JG8, is provided to allow the on-board
Host Target Interface to be powered by the Target board instead of the Host system, as
shown in Table 2-6.
2-8 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 25

Debug Support
DB-25
PORT_TDI
PORT_TDO
PORT_TRST
PORT_TMS
PORT_TCK
PORT_RESET
PARALLEL JTAG
INTERFACE LOGIC
56F803
TDI
TDO
TRST
TMS
TCK
RESET
Figure 2-5. Block Diagram of the Parallel JTAG Interface
Table 2-5. Parallel JTAG Interface Connector Description
P2
Pin # Signal Pin # Signal
1NC14NC
2 PORT_RESET 15 PORT_IDENT
3 PORT_TMS 16 NC
4 PORT_TCK 17 NC
5 PORT_TDI 18 GND
6 PORT_
7 NC 20 GND
8 PORT_IDENT 21 GND
9 PORT_VCC 22 GND
10 NC 23 GND
11 PORT_TDO 24 GND
12 NC 25 GND
13 PORT_CONNECT
TRST 19 GND
Freescale Semiconductor 2-9
Technical Summary, Rev. 5
Page 26

Table 2-6. On-Board Host Target Interface Power Source Jumper Selection
JG8 Comment
1–2 Host supplied power
2–3 Target supplied power
2.8 External Interrupts
Two on-board push-button switches are provided for external interrupt generation, as
shown in Figure 2-9. S2 allows the user to generate a hardware interrupt for signal line
IRQA
two switches allow the user to generate interrupts for his user-specific programs.
.; S3 allows the user to generate a hardware interrupt for signal line IRQB. These
+3.3V
56F803
IRQA
IRQA
+3.3V
IRQB
IRQB
Figure 2-6. Schematic Diagram of the User Interrupt Interface
2-10 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 27

Power Supply
2.9 Reset
Logic is provided in the 56F803 to generate a clean power-on RESET signal. Additional,
reset logic is provided to support the RESET signals from the JTAG connector, the
Parallel JTAG Interface and the user RESET push-button; see Figure 2-7.
+3.3V
RESET
PUSHBUTTON
MANUAL RESET
P_RESET
RESET
Figure 2-7. Schematic Diagram of the RESET Interface
2.10 Power Supply
The main power input, +12V DC at 4.0A, to the 56F803EVM is through a 2.1mm coax
power jack. A 4.0A power supply is provided with the 56F803EVM; however, less than
500mA is required by the EVM. The remaining current is available for user motor control
applications. The 56F803EVM provides +3.3V DC voltage regulation for the device,
memory, RS-232, CAN, parallel JTAG interface and supporting logic; refer to Figure 2-8.
Power applied to the 56F803EVM is indicated with a Power-On LED, referenced as
LED1.
+12V DC
+5.0V
Regulator
+5.0V DC
+3.3V
Regulator
+3.3V DC
56F803
56F803EVM
PARTS
Figure 2-8. Schematic Diagram of the Power Supply
Freescale Semiconductor 2-11
Technical Summary, Rev. 5
Page 28

2.11 UNI-3 Interface
Motor control signals from a family of motor driver boards can be connected to the EVM board
via the UNI-3 connector/interface. The UNI-3 connector/interface contains all of the signals
needed to drive and control the motor drive boards. These signals are connected to differing
groups of the device’s input and output ports: A/D, TIMER and PWM. Refer to Table 2-7 for the
pin out of the UNI-3 connector.
Table 2-7. UNI-3 Connector Description
P1
Pin # Signal Pin # Signal
1 PWM_AT 2 Shield
3 PWM_AB 4 Shield
5 PWM_BT 6 Shield
7 PWM_BB 8 Shield
9 PWM_CT 10 Shield
11 PWM_CB 12 GND
13 GND 14 +5.0V DC
15 +5.0V DC 16 Analog +3.3V DC
17 Analog GND 18 Analog GND
19 Analog +15V DC 20 Analog -15V DC
21 Motor DC Bus Voltage
Sense
23 Motor Phase A Current
Sense
25 Motor Phase C Current
Sense
27 NC 28 Shield
29 Motor Drive Brake Control 30 Serial COM
31 PFC PWM 32 PFC Inhibit
33 PFC Zero Cross 34 Zero Cross A
22 Motor DC Bus Current
Sense
24 Motor Phase B Current
Sense
26 Motor Drive Temperature
Sense
2-12 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 29

Run/Stop Switch
Table 2-7. UNI-3 Connector Description (Continued)
P1
Pin # Signal Pin # Signal
35 Zero Cross B 36 Zero Cross C
37 Shield 38 Back-EMF Phase A Sense
39 Back-EMF Phase B Sense 40 Back-EMF Phase C Sense
2.12 Run/Stop Switch
A Run/Stop toggle switch is connected to GPIO signal AN7, as shown in Figure 2-9. An optional
series resistor is provided which, when removed, allows the user to utilize the AN7 signal for
other purposes.
RUN/STOP SWITCH
Figure 2-9. Run/Stop Switch
56F803
+3.3V
AN7
Freescale Semiconductor 2-13
Technical Summary, Rev. 5
Page 30

2.13 Motor Control PWM Signals and LEDs
The 56F803 has a dedicated PWM unit. The unit contains six PWM, three Phase Current sense
and four Fault input lines. The PWM lines are connected to the UNI-3 interface connector and to
a set of six PWM LEDs via inverting buffers. The buffers are used to isolate and drive the
controller’s PWM outputs to the PWM LEDs. The PWM LEDs indicate the status of PWM group
signals, refer to Figure 2-12. The PWM group signals are routed out to headers and are available
for use by the end user.
56F803
PWMA0
PWMA1
PWMA2
PWMA3
PWMA4
PWMA5
UNI-3
PWMA0
PWMA1
PWMA2
PWMA3
PWMA4
PWMA5
YELLOW LED
GREEN LED
YELLOW LED
GREEN LED
BUFFER
YELLOW LED
GREEN LED
Figure 2-10. PWM Group Interface and LEDs
LED 2
LED 3
LED 4
LED 5
LED 6
LED 7
+3.3V
PWM_AT / 0
PWM_AB / 1
PWM_BT / 2
PWM_BB / 3
PWM_CT / 4
PWM_CB / 5
2.14 Motor Protection Logic
The 56F803EVM contains a UNI-3 connector that interfaces with various motor drive boards.
The controller can sense error conditions generated by the motor power stage boards via signals
on the UNI-3 connector. The motor driver board’s Motor Supply DC Bus Voltage, Current and
Motor Phase Currents are sensed on the power stage board. The conditioned signals are
transferred to the device board via the UNI-3 connector. These analog input signals are compared
to limits set by trimpots. If the input analog signals are greater than the limit set by the trimpot, a
digital-compatible, +3.3V DC, fault signal is generated.
2-14 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 31

Motor Protection Logic
2.14.1 UNI-3 Motor Protection Logic
The UNI-3 DC Bus Over-Voltage signal is connected to the controller’s PWM group’s fault
input, FAULT0. The UNI-3 DC Bus Over-Current signal is connected to the device’s PWM
group’s fault input, FAULT1. Additionally, the UNI-3 DC Bus Over-Voltage and Over-Current
analog signals are connected to two A/D inputs, AN0 and AN1, respectively. Figure 2-11
contains the diagram of the DC Bus Over-Voltage and DC Bus Over-Current circuit for the
UNI-3 interface.
DC BUS VOLTAGE SENSE
V_sense_DCB
+3.3V
+5.0V
+5.0V
+
–
LM393
FAU LT0
DC BUS CURRENT SENSE
I_sense_DCB
+3.3V
+5.0V
+5.0V
+
–
LM393
FAU LT1
Figure 2-11. DC Bus Over-Voltage and Over-Current Detection Schematic Diagram
Freescale Semiconductor 2-15
Technical Summary, Rev. 5
Page 32

2.15 Back-EMF and Motor Phase Current Sensing
The UNI-3 connector supplies Back-EMF and Motor Phase Current signals from the three
phases of a motor attached to a motor drive unit. The Back-EMF signals on the UNI-3
connectors are derived from a resistor divider network contained in the motor drive unit.
These resistors divide down the attached motor’s Back-EMF voltages to a 0 to +3.3V
level. In certain instances, the Back-EMF signals can exceed this maximum range. The
Motor Phase Current signals are derived from current sense resistors. Both of these signal
groups are then routed to a group of header pins that allow the end user to select which
signal group the device’s A/D will monitor. Refer to Figure 2-12 for the design of a single
channel.
JG6
BACK_EMF_A
PHASE_A_I_SENSE
1
2
3
AN2
Figure 2-12. Primary Back-EMF or Motor Phase Current Sense Signals
2-16 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 33

Zero-Crossing Detection
2.16 Quadrature Encoder/Hall-Effect Interface
The 56F803EVM board contains a Quadrature Encoder/Hall-Effect interface connected to the
device’s Quad Encoder input port. The circuit is designed to accept +3.0V to +5.0V encoder or
Hall-Effect sensor inputs. Input noise filtering is supplied on the input path for the Quadrature
Encoder/Hall-Effect interface, along with additional noise rejection circuitry inside the
controller. Figure 2-13 shows the encoder interface.
2.17 Zero-Crossing Detection
An attached UNI-3 motor drive board contains logic that can send out pulses when the phase
voltage of an attached 3-phase motor drops to zero. The motor drive board circuits generate a 0 to
+3.3V DC pulse via voltage comparators. The resulting pulse signals are sent to a set of jumper
blocks shared with the Encoder/Hall-Effect interface. The jumper blocks allow the selection of
Zero-Crossing signals or Quadrature Encoder/Hall-Effect signals. When in operation, the
controller will only monitor one set of signals, either the Encoder/Hall-Effect or the
Zero-Crossing. Figure 2-13 shows the Zero-Crossing and Encoder/Hall circuits.
ZERO_X_A
ZERO_X_B
ZERO_X_C
+5.0V
J2
1
2
3
4
5
6
PIN 1: +5.0V
PIN 2: GROUND
PIN 3: PHASE A
PIN 4: PHASE B
PIN 5: INDEX
PIN 6: HOME
JG7
1
3
FILTER
FILTER
FILTER
FILTER
4
6
7
9
Figure 2-13. Zero-Crossing Encoder Interface
56F803
2
5
8
PHASEA
PHASEB
INDEX
HOME
Freescale Semiconductor 2-17
Technical Summary, Rev. 5
Page 34

2.18 CAN Interface
The 56F803EVM board contains a CAN physical-layer interface chip that is attached to the
MSCAN_RX and MSCAN_TX pins on the 56F803. The EVM board uses a Philips,
PCA82C250, high speed, 1Mbps, physical layer interface chip. Due to the +5.0V operating
voltage of the CAN chip, a pull-up to +5.0V is required to level shift the Transmit Data output
line from the 56F803. A primary, J3, and a daisy-chain, J13, CAN connector are provided to
allow easy daisy-chaining of CAN devices. Refer to Figure 2-14 for a connection diagram and to
Table 2-8 for the CAN signals.
CAN CONNECTOR
J3
X
56F803
MSCAN_TX
MSCAN_RX
1
TXD
4
RXD
8
SLOPE
PCA82C250T
U15
VCC
VREF
CANH
CANL
GND
1
3
+5.0V
3
5
7
6
2
120
5
X
7
9
X
JG10
2
CAN TERMINATION
X
2
4
X
6
X
8
X
10
1
Figure 2-14. CAN Interface
J13
1
X
X
X
2
3
4
5
6
7
8
9
10
DAISY-CHAIN
CAN CONNECTOR
X
X
X
X
2-18 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 35

Peripheral Connectors
Table 2-8. CAN Header Description
J3 and J13
Pin # Signal Pin # Signal
1NC2NC
3 CANL 4 CANH
5 GND 6 NC
7NC8NC
9NC10NC
2.19 Peripheral Connectors
The EVM board contains a group of Peripheral Expansion Connectors used to gain access
to the resources of the 56F803. The following signal groups have Expansion Connectors:
• External Memory Control
• Encoder/Timer Channel
• Timer Channel
• Address Bus
• Data Bus
• A/D Input Port
• Serial Communications Port
• Serial Peripheral Interface Port
• CAN Port
• PWM Port
Freescale Semiconductor 2-19
Technical Summary, Rev. 5
Page 36

2.19.1 External Memory Control Signal Expansion Connector
The External Memory Control Signal connector contains the device’s external memory control
signal lines. See Table 2-9 for the names of these signals.
Table 2-9. External Memory Control Signal Connector Description
J8
Pin # Signal Pin # Signal
1RD
3WR4IRQB
5PS6 RESET
7DS8NC
9CLKO10 DE
11 GND 12 +3.3V
2IRQA
2.19.2 Encoder/Timer Channel Expansion Connector
The Encoder/Timer Channel port is an MPIO port attached to the Timer expansion connector.
The port can act as a Quadrature Decoder interface port or as a general purpose Timer port. Refer
to Table 2-10 for the signals attached to the connector.
Table 2-10. Timer Connector Description
J2
2-20 Freescale Semiconductor
Pin # Signal
1 +5.0V
2 GND
3PhaseA
4PhaseB
5INDEX
6 HOME
DSP56F803EVM User Manual, Rev. 5
Page 37

Peripheral Connectors
2.19.3 Timer Channel Expansion Connector
The Timer Channel port is a GPIO timer port attached to the Timer D expansion connector. See
Table 2-11 for the signals attached to the connector.
Table 2-11. Timer D Connector Description
J10
Pin # Signal
1 TD1
2 TD2
3 GND
4 +3.3V
2.19.4 Address Bus Expansion Connector
The 16-bit Address bus connector contains the controller’s external memory address signal lines.
The upper 8 bits, A8 - A15, can also be used as Port A GPIO lines. See Table 2-12 for the
Address bus connector information.
Table 2-12. External Memory Address Bus Connector Description
J7
Pin # Signal Pin # Signal
1A02A1
3A24A3
5A46A5
7A68A7
9A810A9
11 A10 12 A11
Freescale Semiconductor 2-21
13 A12 14 A13
15 A14 16 A15
17 GND 18 +3.3V
Technical Summary, Rev. 5
Page 38

2.19.5 Data Bus Expansion Connector
The 16-bit Data bus connector contains the controller’s external memory data signal lines. Refer
to Table 2-13 for the Data bus connector information.
Table 2-13. External Memory Address Bus Connector Description
J11
Pin # Signal Pin # Signal
1D02D1
3D24D3
5D46D5
7D68D7
9D810D9
11 D10 12 D11
13 D12 14 D13
15 D14 16 D15
17 GND 18 +3.3V
2-22 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 39

Peripheral Connectors
2.19.6 A/D Port Expansion Connector
The 8-channel Analog-to-Digital conversion port is attached to this connector. See Table 2-14 for
connection information.
Table 2-14. A/D Connector Description
J9
Pin # Signal
1 AN0
2 AN1
3 AN2
4 AN3
5 AN4
6 AN5
7 AN6
8 AN7
9 GNDA
10 +3.3VA
2.19.7 Serial Communications Port Expansion Connector
The Serial Communications Port, SCI, is attached to this connector. Refer to Table 2-15 for
connection information.
Table 2-15. SCI Connector Description
J12
Pin # Signal
1 TXD
Freescale Semiconductor 2-23
2 RXD
3 GND
Technical Summary, Rev. 5
Page 40

2.19.8 Serial Peripheral Interface Expansion Connector
The Serial Peripheral Interface, SPI, is attached to this connector. See Table 2-16 for connection
information.
Table 2-16. SPI Connector Description
J6
Pin # Signal Pin # Signal
1 SCLK 2 MOSI
3MISO4 SS
5 GND 6 +3.3V
2.19.9 CAN Expansion Connector
The CAN port is attached to this connector. Refer to Table 2-17 for connection information.
Table 2-17. CAN Connector Description
J5
Pin # Signal
1 MSCAN_TX
2 MSCAN_RX
3 GND
2-24 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 41

Test Points
2.19.10 PWM Port Expansion Connector
The PWM port is attached to this connector. Refer to Table 2-18 for connection information.
Table 2-18. PWM Port Connector Description
J4
Pin # Signal Pin # Signal
1 ISA0 2 ISA1
3 ISA2 4 FAULT0
5 FAULT1 6 FAULT2
7 PWM0 8 PWM1
9 PWM2 10 PWM3
11 PWM4 12 PWM5
13 GND 14 +3.3V
2.20 Test Points
The 56F803EVM board has nine test points: Five near the breadboard, (+3.3V, GND, +3.3VA,
AGND and +5.0V), and four near the UNI-3 connector, (-15VA, GND, +15VA and GND).
Freescale Semiconductor 2-25
Technical Summary, Rev. 5
Page 42

2-26 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 43

Appendix A
56F803EVM Schematics
Freescale Semiconductor Appendix A-1
56F803EVM Schematics, Rev. 5
Page 44

5
5
4
4
3
3
2
2
1
1
DDC
C
B
B
A
A
JTAG
DSP56803 Pro
cessor
B
DSP56803
EVM.DSN
Monday, June
22, 1998
Development
Tools
14
1
1.3
Wireless Subscriber Divisi
on
6501
William Cannon Drive West
Austin, TX
, 78735-8598
(512)895-3230 FAX: (512)895-4556
MD:OE314
Title
Size
Docu
ment
Nu
mber
Date
:
Design
er:
Re
v.
Shee
t
of
A0A1A2A3A4A5A6A7A8A9A10
A11
A12
A13
A14
A15D0D1D2D3D4D5D6D7D8D9
D10
D11
D12
D13
D14
D15
A[0..15]
D[0..15]
XTAL
RXD
MSCAN_RX
TD1
TD2
TXD
CLKO
EXTAL
MSCAN_TX
PHASEA
PHASEB
INDEX
HOME
AN0
AN4
AN5
AN6
AN7
AN1
PWM1
PWM2
PWM5
IS1
IS0
IS2
FAULT0
FAULT1
FAULT2
PWM0
PWM4
PWM3
AN2
TDO
TCK
TMS
TDI
/TRST
/DE
AN3
/PS
/DS
/WR
/RD
/IRQA
/IRQB
/RESET
EXTBOOT
MISO
SCLK
MOSI
/SS
+3.3V
+3.3VA
C2
2.2uF
50VDC
C1
2.2uF
50VDC
U1
DSP56F803BU80
A07A110A211A312A413A514A6/PE215A7/PE316A8/A017A9/A118A10/A219A11/A320A12/A421A13/A522A14/A626A15/A727D089D190D291D394D495D596D697D798D899D9
100
D101D112D123D134D145D156VSS93VSS67VSS63VSS28VSS
9
VDD92VDD66VDD61VDD23VDD
8
VSSA
59
VDDA
62
VCAPC88VCAPC
39
VRH
48
AN049AN150AN251AN352AN453AN554AN655AN7
56
PWMA070PWMA171PWMA272PWMA373PWMA474PWMA5
75
ISA040ISA141ISA2
42
FAULTA043FAULTA145FAULTA2
47
PS24RS25WR29RD30IRQA31IRQB32RESET79EXTBOOT78CLK081XTAL57EXTAL
58
TCK
34
TMS
35
TDI36TDO
37
TRST
38
PHASEA0/TA0
64
PHASEB0/TA1
65
INDEX0/TA2
68
HOME0/TA3
69
TD182TD2
83
TXD0/PE0
76
RXD0/PE1
77
MOSI/PE586MISO/PE6
85
SCLK/PE4
87
SS/PE7
84
TCS
33
MSCAN_TX
44
MSCAN_RX
46
VDDA
60
DE
80
PFC INHIBIT
BRAKE CONTROL
serial_com
USER LED 0
ENCODER / HALL EFFECT INPUT
RS-232
PFC PWM
PFC ZERO CROSSING
CAN
PULSE WIDTH MODULATION
PHASE CURRENT SENSE
BACK EMF PHASE C
BACK EMF PHASE A
BACK EMF PHASE B
PHASE A CURRENT
PHASE B CURRENT
PHASE C CURRENT
DRIVE TEMPERATURE
DC BUS OVERVOLTAGE
DC BUS OVERCURRENT
DC BUS OVERVOLTAGE FAULT
DC BUS OVERCURRENT FAULT
START / STOP
+
+
Figure A-1. 56F803 Processor
Appendix A-2 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 45

5
5
4
4
3
3
2
2
1
1DDCC
BBA
A
BOOT MODE JU
MPER
IRQA PUSHBUTTON
RES
ET, MODES, CLOCK, IRQS
A
DSP56803EVM.DSN
Monday, July 10, 2000
Development Tools
14
2
1.3
Wireless Subscribe
r Division
650
1 William Cannon Drive West
Austi
n, TX, 78735-8598
(512)895-3230 FAX: (512)895-4556 MD:OE3
14
Title
Size
Doc
ument
Num
ber
Date:
Designer
:
Rev
.
Sheet
of
EXT
AL
/RESET
/IRQA
/IRQB
EXTB
OOT
XT
AL
+3.3V
+3.3V
+3.3V
S2
S4
Y1
8.00MHz
R20
10K
C36
0.1uF
S3
JG4
1
2
R17
10
M
R16
10K
R18
10K
C39
0.1uF
JG3
123
JG9
1
2
OSC BYPASS
IRQB PUSHBUTTON
NC
EXT BOOT
INT BOOT 1 - 2
RESET PUSHBUTTON
Figure A-2. Reset, Mode, Clock & IRQsL
Freescale Semiconductor Appendix A-3
56F803EVM Schematics, Rev. 5
Page 46

5
5
443
3
2
2
1
1DDCC
BBA
A
64Kx16-bit Program and 64Kx16-bit Data Memory
SRAM ENABLE JUMPE
R
PR
OGRAM and DATA SRAM MEMORY
A
DSP56803EVM.DSN
Monday, June 22, 1998
Development Tools
14
3
1.3
Wireless Subscribe
r Division
650
1 William Cannon Drive West
Austi
n, TX, 78735-8598
(512)895-3230 FAX: (512)895-4556 MD:OE3
14
Title
Size
Doc
ument
Num
ber
Date:
Designer
:
Rev
.
Sheet
of
D2D5D13D4D0D6D15
D11D3D10D1D7
D12D9D8
D14
A15
A11A1A12
A10A3A14A5A9A6A8A0A7
A13A2A4
/RD
/WR
D[0..15]
A[0..15]
/PS
+3.3V
+3.3V
JG5
1
2
U2
GS72116TP-12
DQ17DQ2
8A41
DQ39DQ4
10A32
DQ513DQ6
14A23
DQ715DQ8
16A14
DQ9
29
DQ10
30A05
DQ1131DQ12
32
A15
18
DQ1335DQ14
36
A14
19
DQ1537DQ16
38
A1320A1221A1124A1025A926A827A742A643A544UB40LB39OE41WE17CE6A16
22
VSS34VSS
12
VDD33VDD
11
R21
10K
R67
10K
R66
10K
Figure A-3. Program & Data SRAM Memory
NCSRAM DISABLE
1 - 2SRAM ENABLE
JUMPER
OPTION
DSP56F803EVM User Manual, Rev. 5
Appendix A-4 Freescale Semiconductor
Page 47

5
5
4
4
3
3
2
2
1
1
DDC
C
BBA
A
SCI
RS-232 A
ND SCI CONNECTORS
A
DSP56803EVM.DSN
Monday, June 22, 1998
Development Tools
14
4
1.3
Wireless Subscribe
r Division
650
1 William Cannon Drive West
Austi
n, TX, 78735-8598
(512)895-3230 FAX: (512)895-4556 MD:OE3
14
Title
Size
Doc
ument
Num
ber
Date:
Designer
:
Rev
.
Sheet
of
R2IN
R3IN
R2IN
R3IN
R4IN
R5IN
T2IN
T3IN
T2IN
T3IN
/EN
/EN
R5IN
R4IN
TX
D
RXD
+3.3V
R281KR221KR231KR24
1K
P4
DB9S
594837261
C43
0.1uF
C41
0.1uF
R251KR27
1K
C40
0.1uF
C42
0.1uF
R26
1K
C44
0.1uF
U3
ADM3311EARS
V+1C2+2VCC3C2-4EN5C1+6T1IN7T2IN8T3IN9R1OUT
10
R2OUT
11
R3OUT
12
R4OUT
13
R5OUT
14
R5IN15R4IN16R3IN17R2IN18R1IN
19
T3OUT
20
T2OUT
21
T1OUT
22
SD
23
C1-
24V-25
C3-
26
GND
27
C3+
28
R68
1K
TP791TP80
1
TP811TP821TP831TP85
1
RS-232
CONNECTOR
2: TXD
3: RXD
Freescale Semiconductor Appendix A-5
Figure A-4. RS-232 and SCI Connectors
56F803EVM Schematics, Rev. 5
Page 48

5
5
443
3
2
2
1
1DDCC
BBA
A
LEDS
DSP56803 PWM LEDS AND USER LE
D
A
DSP56803EVM.DSN
Monday, June 22, 1998
Development Tools
14
5
1.3
Wireless Subscribe
r Division
650
1 William Cannon Drive West
Austi
n, TX, 78735-8598
(512)895-3230 FAX: (512)895-4556 MD:OE3
14
Title
Size
Doc
ument
Num
ber
Date:
Designer
:
Rev
.
Sheet
of
PWM1PWM0PWM
2
MOSI
PWM4PWM5PWM
3
+3.3V
+3.3V
R29
270
R30
270
R31
270
R33
270
R32
270
R34
270
R35
270
U10C
74AC04
5
6
U10A
74AC04
1
2
U10B
74AC04
3
4
U10D
74AC04
9
8
U10F
74AC04
13
12
U10E
74AC04
11
10
U12A
74AC04
1
2
LED2
YELLOW LED
LED3
GREEN
LED
LED4
YELLOW LED
LED5
GREEN
LED
LED6
YELLOW LED
LED7
GREEN
LED
LED8
GREEN
LED
PWM STATE
USER LED
Figure A-5. 56F803 PWM LEDs and User LED
Appendix A-6 Freescale Semiconductor
USER LED
DSP56F803EVM User Manual, Rev. 5
Page 49

5
5
4
4
3
3
2
2
1
1
DDC
C
B
B
A
A
DSP PWM
UNI-3 OVER VOLTAGE AND CU
RRENT SENSE
B
DSP56803
EVM.DSN
Monday, June
22, 1998
Development
Tools146
1.3
Wireless Subscriber Divisi
on
6501
William Cannon Drive West
Austin, TX
, 78735-8598
(512)895-3230 FAX: (512)895-4556
MD:OE314
Title
Size
Docu
ment
Nu
mber
Date
:
Design
er:
Re
v.
Shee
t
of
AN0
FAULT1
FAULT0
AN1
+3.3V
+3.3V
+5.0V
+5.0V
+5.0V
+5.0V
R44
5.1K
R43
1M
U14A
LM393A
3
2
1
C45
0.1uF
R42
16K
R41
16K
R39
5.1K
C46
0.1uF
U14B
LM393A
5
6
7
R38
1M
R37
16K
R36
16K
R40
R45
FAULT SENSE 0
DSP PWM
FAULT SENSE 1
FAULT DETECTION
UNI-3 OVER-VOLTAGE
8
4
+
-
10K
V_S_DCB
VOLTAGE SENSE
FAULT DETECTION
UNI-3 OVER-CURRENT
8
4
+
-
10K
I_S_DCB
CURRENT SENSE
Figure A-6. UNI-3 Over-Voltage and Current Sense
Freescale Semiconductor Appendix A-7
56F803EVM Schematics, Rev. 5
Page 50

5
5
443
3
2
2
1
1DDCC
BBA
A
CONNE
CT
1-2: ZERO CROSSING
ZERO CROSSING, ENCODER, HAL
L EFFECT SELECTION
A
DSP56803EVM.DSN
Monday, June 22, 1998
Development Tools
1471.3
Wireless Subscribe
r Division
650
1 William Cannon Drive West
Austi
n, TX, 78735-8598
(512)895-3230 FAX: (512)895-4556 MD:OE3
14
Title
Size
Doc
ument
Num
ber
Date:
Designer
:
Rev.Sheet
of
HOME
ZERO_X_C
ZERO_X_B
ZERO_X_A
PHASEB
INDEX
PHASEA
+5.0V
+5.0V
+5.0V
+5.0V
+5.0V
R55
1K
R56
24
C52
470pF
R57
24
JG7A
123
R52
1K
R53
24
R54
24
R49
1K
R50
24
R51
24
C51
470pF
R48
24
C49
470pF
R46
1K
C50
470pF
J2
12345
6
C47
0.1uF
C48
2.2uF
50VDC
R47
24
JG7B
456
JG7C
789
INFORMATION
2-3: ENCODER / HALL
EFFECT INFORMATION
UNI-3: ZERO CROSSING
Appendix A-8 Freescale Semiconductor
+
ENCODER /
HALL
DSP56F803EVM User Manual, Rev. 5
EFFECT
CONNECTOR
PIN 1: +5.0V
PIN 3: PHASE A
PIN 4: PHASE B
PIN 2: GROUND
PIN 5: INDEX
PIN 6: HOME
Figure A-7. Zero-Crossing/ Encoder or Hall-Effect Selection
Page 51

5
5
4
4
3
3
2
2
1
1
DDC
C
BBA
A
DAISY-CHAIN
HIGH SPEED CAN IN
TERFACE
A
DSP56803EVM.DSN
Wednesday, July 05, 2000
Development Tools
14
8
1.3
Wireless Subscribe
r Division
650
1 William Cannon Drive West
Austi
n, TX, 78735-8598
(512)895-3230 FAX: (512)895-4556 MD:OE3
14
Title
Size
Doc
ument
Num
ber
Date:
Designer
:
Rev
.
Sheet
of
CANL
CANH
CANL
CANH
CANH
CANL
MSCAN_T
X
MSCAN_RX
+5.0V
+5.0V
J3
123456789
10
R58
1K
U15
PCA82C250T
TX
D
1
RXD
4
GND2VCC
3
VREF5CANL6CANH
7
SLOPE
8
J13
123456789
10
JG10
1
2
R61
120
1/4W
TP86
1
CAN BUS CONNECTOR
CAN BUS CONNECTOR
Figure A-8. High Speed CAN Interface
Freescale Semiconductor Appendix A-9
56F803EVM Schematics, Rev. 5
Page 52

5
5
4
4
3
3
2
2
1
1
DDC
C
B
B
A
A
ADDRESS BUS CONNECTOR 0-15
PORT TIMER D, ADDRESS, DATA, A/D AND CONTROL
LINES CONNECTORS
B
DSP56803
EVM.DSN
Monday, June
22, 1998
Development
Tools
14
9
1.3
Wireless Subscriber Divisi
on
6501
William Cannon Drive West
Austin, TX
, 78735-8598
(512)895-3230 FAX: (512)895-4556
MD:OE314
Title
Size
Docu
ment
Nu
mber
Date
:
Design
er:
Re
v.
Shee
t
of
A0A2A4A6A8
A10
A12
A14
A1A3A5A7A9
A11
A13
A15
D0D2D4D6D8
D10
D12
D14
D1D3D5D7D9
D11
D13
D15
/DS
/IRQB
/RESET
/IRQA
/WR
/RD
/PS
CLKO
TD2
TD1
/DE
AN1
AN3
AN5
A[0..15]
A[0..15]
D[0..15]
D[0..15]
MOSI
/SS
SCLK
MISO
MSCAN_TX
MSCAN_RX
TXD
RXD
IS0
IS2
FAULT1
PWM4
PWM0
PWM2
IS1
FAULT0
FAULT2
PWM1
PWM5
PWM3
AN0
AN2
AN4
AN6
AN7
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
+3.3VA
J101234
J7
1234567891011121314151617
18
J5
123
J11
123456789101112131415161718J12
J8
1234567891011
12
J6
12345
6
J41357911
13
246
8
101214
J913579246
8
10
PWM PORT
DATA BUS CONNECTOR 0-15
PORT PA:0-7 SHARE ADDRESS BUS PINS A:8-15
3
2
1
SCI
DSP A/D PORT
RAW SIGNALS
RAW CAN
SIGNAL
CONNECTOR
Appendix A-10 Freescale Semiconductor
CONTROL LINES
TIMER CHANNEL D
DSP56F803EVM User Manual, Rev. 5
Figure A-9. Port Timer D, Address, Data, A/D and Control Line Connectors
SPI PORT
Page 53

5
5
4
4
3
3
2
2
1
1
DDC
C
B
B
A
A
UNI-3 INTERFACE AND GPENERAL P
URPOSE SWITCHES
B
DSP56803
EVM.DSN
Monday, June
22, 1998
Development
Tools1410
1.3
Wireless Subscriber Divisi
on
6501
William Cannon Drive West
Austin, TX
, 78735-8598
(512)895-3230 FAX: (512)895-4556
MD:OE314
Title
Size
Docu
ment
Nu
mber
Date
:
Design
er:
Re
v.
Shee
t
of
PFC_PWM
SERIAL_COM
PFC_INHIBIT
PFC_ZERO_CROSS
PFC_PWM
SERIAL_COM
PFC_INHIBIT
PFC_ZERO_CROSS
UNI_3_-15
UNI_3_+15
UNI_3_+15
UNI_3_-15
PWM0
PWM1
PWM2
PWM3
PWM4
PWM5
AN0
AN1
U3_PHB_IS
ZERO_X_A
ZERO_X_B
ZERO_X_C
BK_EMF_A
BK_EMF_B
BK_EMF_C
/SS
SCLK
U3_PHA_IS
TD1
TD2
MISO
AN5
U3_PHC_IS
AN7
+5.0V_UNI3
+5.0V_UNI3
+3.3VA
+3.3VAR110K
JG1
1234567
8
P1
123456789101112131415161718192021222324252627282930313233343536373839
40
S1
SW SPST
TP6
TP7
R9
1K
TP8
1
TP9
+15VA GND
1
TEST POINTS
GND-15VA
1
1
PHASE C BACK EMF
PHASE A BACK EMF
MOTOR DRIVE TEMPERATURE SENSE
MOT OR PHASE B CURRENT SENSE
RUN / STOP SWITCH
RUN/STOP
CROSSING JUMPER
JUMPER
PFC ZERO
PFC PWM
UNI-3 CONNECTOR
PWM_AT
PWM_AB
PWM_BT
PWM_BB
Freescale Semiconductor Appendix A-11
PWM_CT
PWM_CB
V_S_DCB I_S_DCB
MOT OR PHASE A CURRENT SENSE
PHASE B BACK EMF
MOT OR PHASE C CURRENT SENSE
MOTOR DRIVE BRAKE CONTROL
56F803EVM Schematics, Rev. 5
Figure A-10. UNI-3 Interface and General Purpose Switches
COM JUMPER
PFC INHIBIT JUMPER
UNI-3 SERIAL
Page 54

DSP56F803EVM User Manual, Rev. 5
5
5
4
4
3
3
2
2
1
1
DDC
C
BBA
A
BACK-EMF AND PHASE CURRENT SENSE ANALOG INPUT
SELECTORS
A
DSP56803EVM.DSN
Monday, June 22, 1998
Development Tools
14
11
1.3
Wireless Subscribe
r Division
650
1 William Cannon Drive West
Austi
n, TX, 78735-8598
(512)895-3230 FAX: (512)895-4556 MD:OE3
14
Title
Size
Doc
ument
Num
ber
Date:
Designer
:
Rev
.
Sheet
of
BK_EMF_A
AN2
U3_PHA_IS
BK_EMF_C
AN4
U3_PHC_IS
AN3
BK_EMF_B
U3_PHB_IS
JG6A
123
JG6B
456
JG6C
789
Appendix A-12 Freescale Semiconductor
Figure A-11. Back-EMF and Phase Current Sense Analog Input Selectors
Page 55

5
5
4
4
3
3
2
2
1
1
DDC
C
B
B
A
A
On-Board
PARALLEL JTAG HOST TARGET INTERFAC
E AND JTAG CONNECTOR
B
DSP56803
EVM.DSN
Monday, June
22, 1998
Development
Tools
14
12
1.3
Wireless Subscriber Divisi
on
6501
William Cannon Drive West
Austin, TX
, 78735-8598
(512)895-3230 FAX: (512)895-4556
MD:OE314
Title
Size
Docu
ment
Nu
mber
Date
:
Design
er:
Re
v.
Shee
t
of
PORT_TDO
PORT_CONNECT
PORT_RESET
PORT_TMS
PORT_TCK
PORT_IDENT
PORT_TDI
/PORT_TRST
/RESET
TDO
TMS
TCK
TDI
P_RESET
/TRST
P_RESET
/TRST
TDO
PORT_VCC
TMS
TCK
TDI
TDO
/RESET
/TRST
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
P2
DB25M
132
15141641751861972082192210231124122513J1
12345678910111213
14
R351R4
51
U7
MC74HC244DW
1Y1181Y2161Y3141Y4122Y192Y2
7
2Y352Y432G191G11A121A241A361A482A1112A2
13
2A3152A4
17
VCC20GND
10
U6
MC74HC244DW
1Y1181Y2161Y3141Y4122Y192Y2
7
2Y352Y4
3
2G191G
1
1A121A241A361A482A1112A2
13
2A3152A4
17
VCC20GND
10R25.1K
R7
5.1K
R6
5.1K
R5
5.1K
R8
10K
Q1
2N2222/TO
R60
5.1K
JG8
C3
0.1uF
R65
5.1K
R63
5.1K
R62
5.1K
R64
5.1K
JG2
1
2
TP46
1
TP47
1
Host Target
Interface
Disable
JTAG Connector
DSP /JTAG-RESET
On-Board
Host Target Interface
Power Source
3
2
1
KEY
Parallel JTAG Interface
DSP /RESET
Figure A-12. Parallel JTAG Host/Target Interface and JTAG Connector
56F803EVM Schematics, Rev. 5
Freescale Semiconductor Appendix A-13
Page 56

5
5
4
4
3
3
2
2
1
1
DDC
C
B
B
A
A
POWER GOOD LED
POWER SUPPLIES +3.3V AND
+5.0V
B
DSP56803
EVM.DSN
Monday, June
22, 1998
Development
Tools
14
13
1.3
Wireless Subscriber Divisi
on
6501
William Cannon Drive West
Austin, TX
, 78735-8598
(512)895-3230 FAX: (512)895-4556
MD:OE314
Title
Size
Docu
ment
Nu
mber
Date
:
Design
er:
Re
v.
Shee
t
of
+5.0V
+3.3V
+3.3VA
+5.0V
+5.0V_UNI3
+3.3VA
+3.3V
+5.0V
+3.3V
U9
MC33269DT_3.3
VIN
3
VOUT2VOUT
4
GND
1
C7
0.1uFP31
2
R10
470
L2
FERRITE BEAD
L4
FERRITE BEAD
L1
FERRITE BEAD
U8
MC33269DT_5.0
VIN3VOUT2VOUT4GND
1
TP3
L3
FERRITE BEAD
C4
470uF
16VDC
TP5
TP1
C6
47uF
10VDC
C5
0.1uF
TP2
TP4
C8
47uF
10VDC
D2
FM4001
D1
FM4001
D3
FM4001
LED1
GREEN LED
+
+
4
123
REGULATOR
MC33269
3.3V AND 5.0V
+
3
INPUT 12V DC
EXTERNAL POWER IN
Appendix A-14 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Figure A-13. Power Supplies 3.3V and 5.0V
+3.3VA +3.3V +5.0V GND GNDA
1
1
1
1
1
NEAR THE BREADBOARD AREA
Page 57

5
5
4
4
3
3
2
2
1
1
DDC
C
B
B
A
A
HEADER
BYPASS CAPACITORS AND SPARE G
ATES
B
DSP56803
EVM.DSN
Monday, June
22, 1998
Development
Tools
14
14
1.3
Wireless Subscriber Divisi
on
6501
William Cannon Drive West
Austin, TX
, 78735-8598
(512)895-3230 FAX: (512)895-4556
MD:OE314
Title
Size
Docu
ment
Nu
mber
Date
:
Design
er:
Re
v.
Sheetof
+3.3V
+3.3V
+3.3V
+5.0V
+3.3V
+3.3VA
+3.3V
+3.3V
+5.0V
+3.3V
+3.3VA
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
+5.0V
+3.3VA
+3.3V
C19
0.1uF
C18
0.1uF
C17
0.1uF
C12
0.1uF
C14
0.1uF
C13
0.1uF
C33
0.01uF
C9
0.1uF
C10
0.1uF
C11
0.1uF
C30
0.1uF
C26
0.1uF
C31
0.1uF
C32
0.01uF
C25
1.0uF
50VDC
C24
0.1uF
R11
5.1K
C23
0.1uF
C27
0.01uF
U12B
74AC0434
C22
0.1uF
C15
0.1uF
C16
0.1uF
U12C
74AC0456
C20
0.1uF
U12D
74AC04
9
8
C21
0.1uF
U12E
74AC04
1110R12
5.1K
R13
5.1K
R14
5.1K
U12F
74AC041312
R59
5.1K
TP54
1
TP531TP56
1
TP551TP52
1
HEADER
CONTROL TIMER D
CAN
INTERFACE
DATA BUS
GS72116
UNI-3
+3.3 VA
UNI-3
+5.0 VOLT
DSP56F803
CONNECTOR CONNECTOR
ADDRESS BUS
LM393 74AC0474AC04ADM3311E 74HC244
A/D CONNECTOR
Figure A-14. Bypass Capacitors and Spare Gates
Freescale Semiconductor Appendix A-15
PWM
HEADER
56F803EVM Schematics, Rev. 5
Page 58

Appendix A-16 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 59

Appendix B
56F803EVM Bill of Material
Qty Description Ref. Designators Vendor Part #s
Integrated Circuits
1 DSP56F803BU80 U1 Freescale, DSP56F803BU80
1 GS72116TP-12 U2 GSI, GS72116TP-12
1 ADM3311EARS U3 Analog Devices, ADM3311EARS
2 MC74HC244DW U6, U7 ON Semiconductor, MC74HC244DW
1 MC33269DT-5.0 U8 ON Semiconductor, MC33269DT-5.0
1 MC33269DT-3.3 U9 ON Semiconductor, MC33269DT-3.3
2 74AC04SC U10, U12 Fairchild, 74AC04SC
1 LM393 U14 National Semiconductor, LM393
1 PCA82C250T U15 Philips Semiconductor, PCA82C250T
Resistors
4 16K : R36, R37, R41, R42 SMEC RC73L2A16KOHMJT
21M : R43, R38 SMEC RC73L2A1MOHMJT
16 5.1K : R2, R5 - R7, R11 - R14, R39,
R44, R59, R60, R62 - R65
8 10K : R1, R8, R16, R18, R20, R21,
R66, R67
251: R3, R4 SMEC RC73L2A51OHMJT
1 470 : R10 SMEC RC73L2A470OHMJT
1 10M : R17 SMEC RC73L2A10MOHMJT
14 1K : R9, R22 - R28, R46, R49, R52,
R55, R58, R68
56F803EVM Bill of Material, Rev. 5
SMEC RC73L2A5.1KOHMJT
SMEC RC73L2A10KOHMJT
SMEC RC73L2A1KOHMJT
Freescale Semiconductor Appendix B-1
Page 60

Qty Description Ref. Designators Vendor Part #s
Resistors (Continued)
7 270 : R29 - R35 SMEC RC73L2A270OHMJT
824: R47, R48, R50, R51, R53, R54,
SMEC RC73L2A24OHMJT
R56, R57
1 120 :, 1/4W R61 YAGEO CFR 120QBK
Potentioneters
2 10K : R40, R45 BC/MEPCOPAL ST4B103CT
Inductors
4 1.0mH L1 - L4 Fair-Rite 2743015112
LEDs
5 Green LED LED1, LED3, LED5, LED7,
Hewlett-Packard HSMG-C650
LED8
3 Yellow LED LED2, LED4, LED6 Hewlett-Packard HSMY-C650
Diode
3 FM4001 D1, D2, D3 Vishay DL4001DICT
Capacitors
3 2.2PF, 50V DC C1, C2, C48 TTI UWX1H2R2MCR2GB
32 0.1PF C3, C5, C7, C9 - C24, C26,
SMEC MCCE104K2NR-T1
C30, C31, C35, C36,
C39 - C47
3 0.01PF C27, C32, C33 SMEC MCCE103K2NR-T1
1 470PF, 16V DC C4 PANASONIC ECE-V1CA471P
247PF, 10V DC C6, C8 PANASONIC ECE-V1AA470P
1 1.0PF, 50V DC C25 TTI UWT1H010MCR1GB
4 470pF C49 - C52 SMEC MCCE471J2NO-T1
Jumpers
43u 1 Bergstick JG3, JG8, J5, J12 SAMTEC TSW-103-07-S-S
14u 2 Bergstick JG1 SAMTEC TSW-104-07-S-D
51u 2 Bergstick JG2, JG4, JG5, JG9, JG10 SAMTEC TSW-102-07-S-S
DSP56F803EVM User Manual, Rev. 5
Appendix B-2 Freescale Semiconductor
Page 61

Qty Description Ref. Designators Vendor Part #s
Jumpers (Continued)
2 3 x 3 Bergstick JG6, JG7 SAMTEC TSW-103-07-S-T
3 5 x 2 Bergstick J3, J9, J13 SAMTEC TSW-105-07-S-D
1 4 x 1 Bergstick J10 SAMTEC TSW-104-07-S-S
1 3 x 2 Bergstick J6 SAMTEC TSW-103-07-S-D
2 9 x 2 Bergstick J7, J11 SAMTEC TSW-109-07-S-D
2 7 x 2 Bergstick J1, J4 SAMTEC TSW-107-07-S-D
1 6 x 1 MTA J2 AMP MTA 640456-6
1 6 x 2 Bergstick J8 SAMTEC TSW-106-07-S-D
Test Points
91u 1 Bergstick TP1, TP2, TP3, TP4, TP5, TP6,
Samtec TSW-101-07-S-S
TP7, TP8, TP9
Crystals
1 8.00MHz Crystal Y1 ECS-80-18-5P
Connectors
1 20 x 2 Shrouded P1 3M 2540-6002UB
1 DB25M Connector P2 AMPHENOL 617-C025P-AJ121
1 2.1mm coax
P3 Switch Craft RAPC-722
Power Connector
1 DE9F Connector P4 AMPHENOL 617-C009S-AJ120
Switches
1 SPDT Toggle S1 C&K GT11MSCKE
3 SPST Pushbutton S2, S3, S4 Panasonic EVQ-QS205K
Transistors
1 2N2222A Q1 ZETEX FMMT2222ACT
11 Shunt SH1–SH11 Samtec SNT-100-BL-T
6 Rubber Feet RF1–RF6 3M SJ5018BLKC
Freescale Semiconductor Appendix B-3
Miscellaneous
56F803EVM Bill of Material, Rev. 5
Page 62

Appendix B-4 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 63

INDEX
Symbols
+12VDC power supply 4
Numerics
4.0Amp power supply 11
56F803 Technical Data x
64Kx16-bit of data memory 1
64Kx16-bit of program memory 1
8.00MHz crystal oscillator 1
A
A/D ix
A/D Port 2
Analog-to Digital
A/D ix
B
Back-EMF
signals 16
voltages 16
Connector
A/D 23
Address bus 21
CAN 24
Data bus 22
Encoder/Timer Channel 20
External Memory Control 20
PWM 25
SCI 23
SPI 24
Timer Channel 21
Connectors
Peripheral Expansion 19
Controller Area Network
CAN ix
D
Data memory 4
Development Card 1
DSP56800 Family Manual x
DSP56F801/803/805/807 User’s Manual x
E
C
CAN ix
bus termination 1
bypass 1
interface 1
CAN in Automation
CiA ix
CAN interface 1
CAN physical layer peripheral 1
CAN Specification 2.0B x
CiA ix
CiA Draft Recommendation DR-303-1, Cabling and
Connector Pin Assignment x
Encoder/Hall-Effect
circuits 17
Encoder/Timer Channel 20
Evaluation Module
EVM ix
EVM ix
External Memory Control Signal 20
external memory expansion connectors 2
External Memory Interface
Schematic Diagram 4
external oscillator frequency input 1
Freescale Semiconductor Index - 1
Index, Rev. 5
Page 64

F
M
FSRAM 1,4
G
General Purpose Input and Output Port
GPIO ix
GPIO ix
GPIO-compatible peripheral 1
,1,13,
21
H
Hall-Effect/Quadrature Encoder interface 1
Host Parallel Interface Connector 7
Host Target Interface 1
external 7
,
7
I
IC ix
Integrated Circuit
IC ix
J
Joint Test Action Group
JTAG ix
JTAG ix
JTAG port interface 1
Jumper Group 3
,
1
connector 7
JG1 3
JG10 3
JG2 3
JG3 3
JG4 3
JG5 3
JG6 3
JG7 3
JG8 3
JG9 3
MOSI 7
motor bus
over-current 1
over-voltage 1
MPIO ix
MPIO-compatible peripheral 1
Multi Purpose Input and Output Port
MPIO ix
O
On-board power regulation 2
OnCE ix
OnCE(TM) 1
On-Chip Emulation
OnCE ix
P
PCB ix
Phase Locked Loop
PLL ix
PLL ix
Printed Circuit Board
PCB ix
Program memory 4
Pulse Width Modulation
PWM ix
PWM ix
Group Interface and LEDs 14
group signals 14
LEDs 14
outputs 14
signals 14
PWM-compatible peripheral 1
Q
Quad Encoder 17
Quadrature Encoder/Hall-Effect 17
L
Logic
motor bus over-current 1
motor bus over-voltage 1
motor zero crossing 1
Low-Profile Quad Flat Pack
LQFP ix
LQFP ix
Index - 2 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 65

R
Z
RAM ix
Random Access Memory
RAM ix
Read Only Memory
ROM ix
real-time debugging 7
ROM ix
RS-232
cable connection 4
interface 5
Schematic Diagram 5
RS-232 interface 1
S
SCI ix
Serial Communications Port 23
SCI-compatible peripheral 1
Serial Communications Interface
SCI ix
Serial Peripheral Interface Port
SPI ix
SPI ix
Serial Peripheral Interface 24
SPI-compatible peripheral 1
SRAM ix
external data 1
external program 1
Static Random Access Memory
SRAM ix
Zero-Crossing
circuits 17
T
test points 25
Timer Channel 21
Timer compatible peripheral 1
U
UART ix
UNI-3
interface connector 14
Motor interface 2
UNI-3 connector/interface 12
Universal Asynchronous Receiver/Transmitter
UART ix
Freescale Semiconductor Index - 3
,
16
Index, Rev. 5
Page 66

Index - 4 Freescale Semiconductor
DSP56F803EVM User Manual, Rev. 5
Page 67

Page 68

How to Reach Us:
Home Page:
www.freescale.com
E-mail:
support@freescale.com
USA/Europe or Locations Not Listed:
Freescale Semiconductor
Technical Information Center, CH370
1300 N. Alma School Road
Chandler, Arizona 85224
+1-800-521-6274 or +1-480-768-2130
support@freescale.com
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
support@freescale.com
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku,
Tokyo 153-0064, Japan
0120 191014 or +81 3 5437 9125
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor Hong Kong Ltd.
Technical Information Center
2 Dai King Street
Tai Po Industrial Estate
Tai Po, N.T., Hong Kong
+800 2666 8080
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor Literature Distribution Center
P.O. Box 5405
Denver, Colorado 80217
1-800-441-2447 or 303-675-2140
Fax: 303-675-2150
LDCForFreescaleSemiconductor@hibbertgroup.com
Information in this document is provided solely to enable system and
software implementers to use Freescale Semiconductor products. There are
no express or implied copyright licenses granted hereunder to design or
fabricate any integrated circuits or integrated circuits based on the
information in this document.
Freescale Semiconductor reserves the right to make changes without further
notice to any products herein. Freescale Semiconductor makes no warranty,
representation or guarantee regarding the suitability of its products for any
particular purpose, nor does Freescale Semiconductor assume any liability
arising out of the application or use of any product or circuit, and specifically
disclaims any and all liability, including without limitation consequential or
incidental damages. “Typical” parameters that may be provided in Freescale
Semiconductor data sheets and/or specifications can and do vary in different
applications and actual performance may vary over time. All operating
parameters, including “Typicals”, must be validated for each customer
application by customer’s technical experts. Freescale Semiconductor does
not convey any license under its patent rights nor the rights of others.
Freescale Semiconductor products are not designed, intended, or authorized
for use as components in systems intended for surgical implant into the body,
or other applications intended to support or sustain life, or for any other
application in which the failure of the Freescale Semiconductor product could
create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescale Semiconductor products for any such unintended
or unauthorized application, Buyer shall indemnify and hold Freescale
Semiconductor and its officers, employees, subsidiaries, affiliates, and
distributors harmless against all claims, costs, damages, and expenses, and
reasonable attorney fees arising out of, directly or indirectly, any claim of
personal injury or death associated with such unintended or unauthorized
use, even if such claim alleges that Freescale Semiconductor was negligent
regarding the design or manufacture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor,
Inc. All other product or service names are the property of their respective owners.
This product incorporates SuperFlash® technology licensed from SST.
© Freescale Semiconductor, Inc. 2005. All rights reserved.
DSP56F803EVMUM
Rev. 5
07/2005
 Loading...
Loading...