

Page 1
Data Sheet: JN5148-001 Preliminary
IEEE802.15.4 Wireless Microcontroller
Overview
The JN5148-001 is an ultra low power, high performance wireless
microcontroller targeted at ZigBee PRO networking applications. The device
features an enhanced 32-bit RISC processor offering high coding efficiency
through variable width instructions, a multi-stage instruction pipeline and low
power operation with programmable clock speeds. It also includes a 2.4GHz
IEEE802.15.4 compliant transceiver, 128kB of ROM, 128kB of RAM, and a
rich mix of analogue and digital peripherals. The large memory footprint
allows the device to run both a network stack, e.g. ZigBee PRO, and an
embedded application or in a co-processor mode. The operating current is
below 18mA, allowing operation direct from a coin cell.
Enhanced peripherals include low power pulse counters running in sleep
mode designed for pulse counting in AMR applications and a unique Time
of Flight ranging engine, allowing accurate location services to be
implemented on wireless sensor networks. It also includes a 4-wire I
audio interface, to interface directly to mainstream audio CODECs, as well
as conventional MCU peripherals.
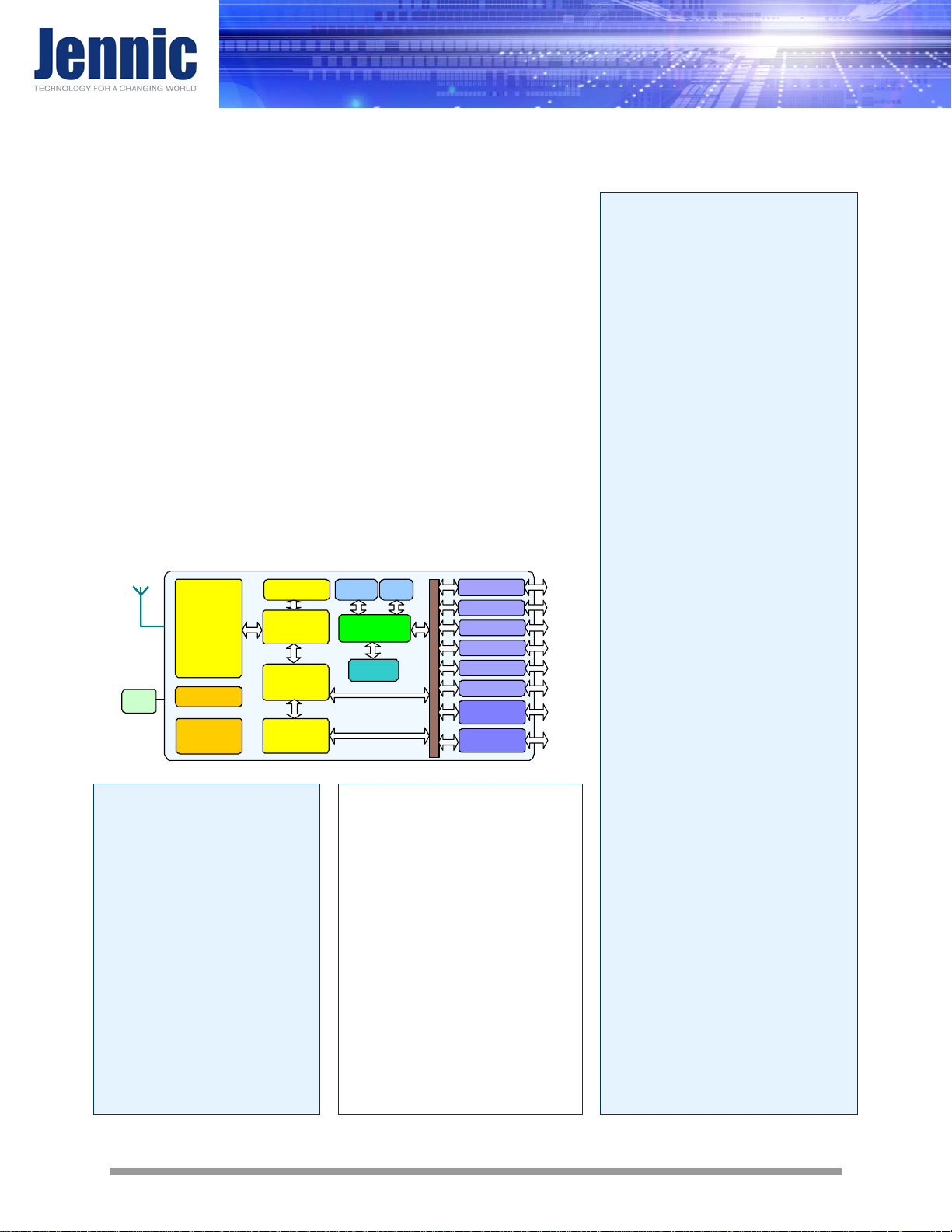
Block Diagram
RAM
Time of Flight
Engine
2.4GHz
Radio
XTAL
Watchdog
Timer
Power
Management
O-QPSK
Modem
IEEE802.15.4
MAC
Acceler ator
128-bi t AES
Encryption
Acceler ator
Benefits
• Single chip integrates
transceiver and
microcontroller for wireless
sensor networks
• Large memory footprint to
run ZigBee PRO together
with an application
• Very low current solution for
long battery life
• Highly featured 32-bit RISC
CPU for high performance
and low power
• System BOM is low in
component count and cost
• Extensive user peripherals
128kB
32-bit
RISC CPU
32-byte
OTP eFuse
ROM
128kB
SPI
2-Wir e Serial
Timer s
UARTs
4-Wire Audio
Sleep Counters
12-bit ADC,
Comparators
12-bit DACs,
Temp Se n s or
Applications
• Robust and secure low power
wireless applications
• ZigBee PRO networks
• Smart metering
(e.g. AMR)
• Home and commercial building
automation
• Location Aware services – e.g.
Asset Tracking
• Industrial systems
• Telemetry
• Remote Control
• Toys and gaming peripherals
Features: Transceiver
• 2.4GHz IEEE802.15.4 compliant
• Time of Flight ranging engine
• 128-bit AES security processor
• MAC accelerator with packet
• 500 & 667kbps data rate modes
• Integrated sleep oscillator for low
• On chip power regulation for 2.0V
• Deep sleep current 100nA
2
• Sleep current with active sleep
S
• <$0.50 external component cost
• Rx current 17.5mA
• Tx current 15.0mA
• Receiver sensitivity -95dBm
• Transmit power 2.5dBm
Features: Microcontroller
• Low power 32-bit RISC CPU, 4 to
• Variable instruction width for high
• Multi-stage instruction pipeline
• 128kB ROM and 128kB RAM for
• JTAG debug interface
• 4-input 12-bit ADC, 2 12-bit
• 3 application timer/counters,
• 2 UARTs
• SPI port with 5 selects
• 2-wire serial interface
• 4-wire digital audio interface
• Watchdog timer
• Low power pulse counters
• Up to 21 DIO
Industrial temp (-40°C to +85°C)
8x8mm 56-lead Punched QFN
Lead-free and RoHS compliant
formatting, CRCs, address check,
auto-acks, timers
power
to 3.6V battery operation
timer 1.25µA
32MHz clock speed
coding efficiency
bootloaded program code & data
DACs, 2 comparators
© Jennic 2009 JN-DS-JN5148-001 1v2 1
Preliminary
Page 2

Jennic
Contents
1 Introduction 6
1.1 Wireless Transceiver 6
1.2 RISC CPU and Memory 6
1.3 Peripherals 7
1.4 Block Diagram 8
2 Pin Configurations 9
2.1 Pin Assignment 10
2.2 Pin Descriptions 12
2.2.1 Power Supplies 12
2.2.2 Reset 12
2.2.3 32MHz Oscillator 12
2.2.4 Radio 12
2.2.5 Analogue Peripherals 13
2.2.6 Digital Input/Output 13
3 CPU 15
4 Memory Organisation 16
4.1 ROM 16
4.2 RAM 17
4.3 OTP eFuse Memory 17
4.4 External Memory 17
4.4.1 External Memory Encryption 18
4.5 Peripherals 18
4.6 Unused Memory Addresses 18
5 System Clocks 19
5.1 16MHz System Clock 19
5.1.1 32MHz Oscillator 19
5.1.2 24MHz RC Oscillator 19
5.2 32kHz System Clock 20
5.2.1 32kHz RC Oscillator 20
5.2.2 32kHz Crystal Oscillator 20
5.2.3 32kHz External Clock 20
6 Reset 21
6.1 Internal Power-on Reset 21
6.2 External Reset 22
6.3 Software Reset 22
6.4 Brown-out Detect 23
6.5 Watchdog Timer 23
7 Interrupt System 24
7.1 System Calls 24
7.2 Processor Exceptions 24
7.2.1 Bus Error 24
7.2.2 Alignment 24
7.2.3 Illegal Instruction 24
7.2.4 Stack Overflow 24
7.3 Hardware Interrupts 25
2 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 3

Jennic
8 Wireless Transceiver 26
8.1 Radio 26
8.1.1 Radio External Components 27
8.1.2 . Antenna Diversity 27
8.2 Modem 29
8.3 Baseband Processor 29
8.3.1 Transmit 29
8.3.2 Reception 30
8.3.3 Auto Acknowledge 30
8.3.4 Beacon Generation 30
8.3.5 Security 30
8.4 Security Coprocessor 30
8.5 Location Awareness 31
8.6 Higher Data Rates 31
9 Digital Input/Output 32
10 Serial Peripheral Interface 33
11 Timers 36
11.1 Peripheral Timer/Counters 36
11.1.1 Pulse Width Modulation Mode 37
11.1.2 Capture Mode 37
11.1.3 Counter/Timer Mode 38
11.1.4 Delta-Sigma Mode 38
11.1.5 Example Timer / Counter Application 39
11.2 Tick Timer 39
11.3 Wakeup Timers 40
11.3.1 RC Oscillator Calibration 41
12 Pulse Counters 42
13 Serial Communications 43
13.1 Interrupts 44
13.2 UART Application 44
14 JTAG Debug Interface 45
15 Two-Wire Serial Interface 46
15.1 Connecting Devices 46
15.2 Clock Stretching 47
15.3 Master Two-wire Serial Interface 47
15.4 Slave Two-wire Serial Interface 48
16 Four-Wire Digital Audio Interface 49
17 Random Number Generator 51
18 Sample FIFO 52
19 Intelligent Peripheral Interface 53
19.1 Data Transfer Format 53
19.2 JN5148 (Slave) Initiated Data Transfer 54
19.3 Remote (Master) Processor Initiated Data Transfer 54
© Jennic 2009 JN-DS-JN5148-001 1v2 3
Preliminary
Page 4

Jennic
20 Analogue Peripherals 56
20.1 Analogue to Digital Converter 57
20.1.1 Operation 57
20.1.2 Supply Monitor 58
20.1.3 Temperature Sensor 58
20.2 Digital to Analogue Converter 58
20.2.1 Operation 58
20.3 Comparators 59
21 Power Management and Sleep Modes 60
21.1 Operating Modes 60
21.1.1 Power Domains 60
21.2 Active Processing Mode 60
21.2.1 CPU Doze 60
21.3 Sleep Mode 60
21.3.1 Wakeup Timer Event 61
21.3.2 DIO Event 61
21.3.3 Comparator Event 61
21.3.4 Pulse Counter 61
21.4 Deep Sleep Mode 61
22 Electrical Characteristics 62
22.1 Maximum Ratings 62
22.2 DC Electrical Characteristics 62
22.2.1 Operating Conditions 62
22.2.2 DC Current Consumption 63
22.2.3 I/O Characteristics 64
22.3 AC Characteristics 64
22.3.1 Reset and Voltage Brown-Out 64
22.3.2 SPI MasterTiming 66
22.3.3 Intelligent Peripheral (SPI Slave) Timing 66
22.3.4 Two-wire Serial Interface 67
22.3.5 Four-Wire Digital Audio Interface 68
22.3.6 Wakeup and Boot Load Timings 68
22.3.7 Bandgap Reference 69
22.3.8 Analogue to Digital Converters 69
22.3.9 Digital to Analogue Converters 70
22.3.10 Comparators 71
22.3.11 32kHz RC Oscillator 71
22.3.12 32kHz Crystal Oscillator 72
22.3.13 32MHz Crystal Oscillator 72
22.3.14 24MHz RC Oscillator 73
22.3.15 Temperature Sensor 73
22.3.16 Radio Transceiver 74
Appendix A Mechanical and Ordering Information 79
A.1 56-pin QFN Package Drawing 79
A.2 PCB Decal 80
A.3 Ordering Information 81
A.4 Device Package Marking 82
A.5 Tape and Reel Information 83
A.5.1 Tape Orientation and Dimensions 83
4 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 5
Jennic
A.5.2 Reel Information: 180mm Reel 84
A.5.3 Reel Information: 330mm Reel 85
A.5.4 Dry Pack Requirement for Moisture Sensitive Material 85
Appendix B Development Support 86
B.1 Crystal Oscillators 86
B.1.1 Crystal Equivalent Circuit 86
B.1.2 Crystal Load Capacitance 86
B.1.3 Crystal ESR and Required Transconductance 87
B.2 32MHz Oscillator 88
B.3 32kHz Oscillator 90
B.4 JN5148 Module Reference Designs 92
B.4.1 Schematic Diagram 92
B.4.2 PCB Design and Reflow Profile 94
Related Documents 95
RoHS Compliance 95
Status Information 95
Disclaimers 96
Version Control 96
Contact Details 97
© Jennic 2009 JN-DS-JN5148-001 1v2 5
Preliminary
Page 6

Jennic
1 Introduction
The JN5148-001 is an IEEE802.15.4 wireless microcontroller that provides a fully integrated solution for applications
using the IEEE802.15.4 standard in the 2.4 - 2.5GHz ISM frequency band
of the functionality required to meet the IEEE802.15.4 and ZigBee PRO specifications and has additional processor
capability to run a wide range of applications including, but not limited to Smart Energy, Automatic Meter Reading,
Remote Control, Home and Building Automation, Toys and Gaming.
Applications that transfer data wirelessly tend to be more complex than wired ones. Wireless protocols make
stringent demands on frequencies, data formats, timing of data transfers, security and other issues. Application
development must consider the requirements of the wireless network in addition to the product functionality and user
interfaces. To minimise this complexity, Jennic provides a series of software libraries and interfaces that control the
transceiver and peripherals of the JN5148. These libraries and interfaces remove the need for the developer to
understand wireless protocols and greatly simplifies the programming complexities of power modes, interrupts and
hardware functionality.
In view of the above, the register details of the JN5148 are not provided in the datasheet.
The device includes a Wireless Transceiver, RISC CPU, on chip memory and an extensive range of peripherals.
Hereafter, the JN5148-001 will be referred to as JN5148.
1.1 Wireless Transceiver
The Wireless Transceiver comprises a 2.45GHz radio, a modem, a baseband controller and a security coprocessor.
In addition, the radio also provides an output to control transmit-receive switching of external devices such as power
amplifiers allowing applications that require increased transmit power to be realised very easily. Appendix B.4,
describes a complete reference design including Printed Circuit Board (PCB) design and Bill Of Materials (BOM).
The security coprocessor provides hardware-based 128-bit AES-CCM, CBC
specified by the IEEE802.15.4 standard. It does this in-band on packets during transmission and reception, requiring
minimal intervention from the CPU. It is also available for off-line use under software control for encrypting and
decrypting packets generated by software layers such as ZigBee and user applications. This means that these
algorithms can be off-loaded by the CPU, increasing the processor bandwidth available for user applications.
The transceiver elements (radio, modem and baseband) work together to provide IEEE802.15.4 Medium Access
Control (MAC) under the control of a protocol stack. Applications incorporating IEEE802.15.4 functionality can be
rapidly developed by combining user-developed application software with a protocol stack library.
(1) AES-CBC processing is only available off-line for use under software control.
[1], including ZigBee PRO. It includes all
(1)
, CTR and CCM* processing as
1.2 RISC CPU and Memory
A 32-bit RISC CPU allows software to be run on chip, its processing power being shared between the IEEE802.15.4
MAC protocol, other higher layer protocols and the user application. The JN5148 has a unified memory architecture,
code memory, data memory, peripheral devices and I/O ports are organised within the same linear address space.
The device contains 128kbytes of ROM, 128kbytes of RAM and a 32-byte One Time Programmable (OTP) eFuse
memory.
6 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 7

Jennic
1.3 Peripherals
The following peripherals are available on chip:
• Master SPI port with five select outputs
• Two UARTs with support for hardware or software flow control
• Three programmable Timer/Counters – all three support Pulse Width Modulation (PWM) capability, two have
capture/compare facility
• Two programmable Sleep Timers and a Tick Timer
2
• Two-wire serial interface (compatible with SMbus and I
• Four-wire digital audio interface (compatible with I²S)
• Slave SPI port for Intelligent peripheral mode (shared with digital I/O)
• Twenty-one digital I/O lines (multiplexed with peripherals such as timers and UARTs)
• Four channel, 12-bit, Analogue to Digital converter
• Two 12-bit Digital to Analogue converters
• Two programmable analogue comparators
• Internal temperature sensor and battery monitor
• Time Of Flight ranging engine
• Two low power pulse counters
• Random number generator
• Watchdog Timer and Voltage Brown-out
• Sample FIFO for digital audio interface or ADC/DAC
• JTAG hardware debug port
User applications access the peripherals using the Integrated Peripherals API. This allows applications to use a
tested and easily understood view of the peripherals allowing rapid system development.
C) supporting master and slave operation
© Jennic 2009 JN-DS-JN5148-001 1v2 7
Preliminary
Page 8
Jennic
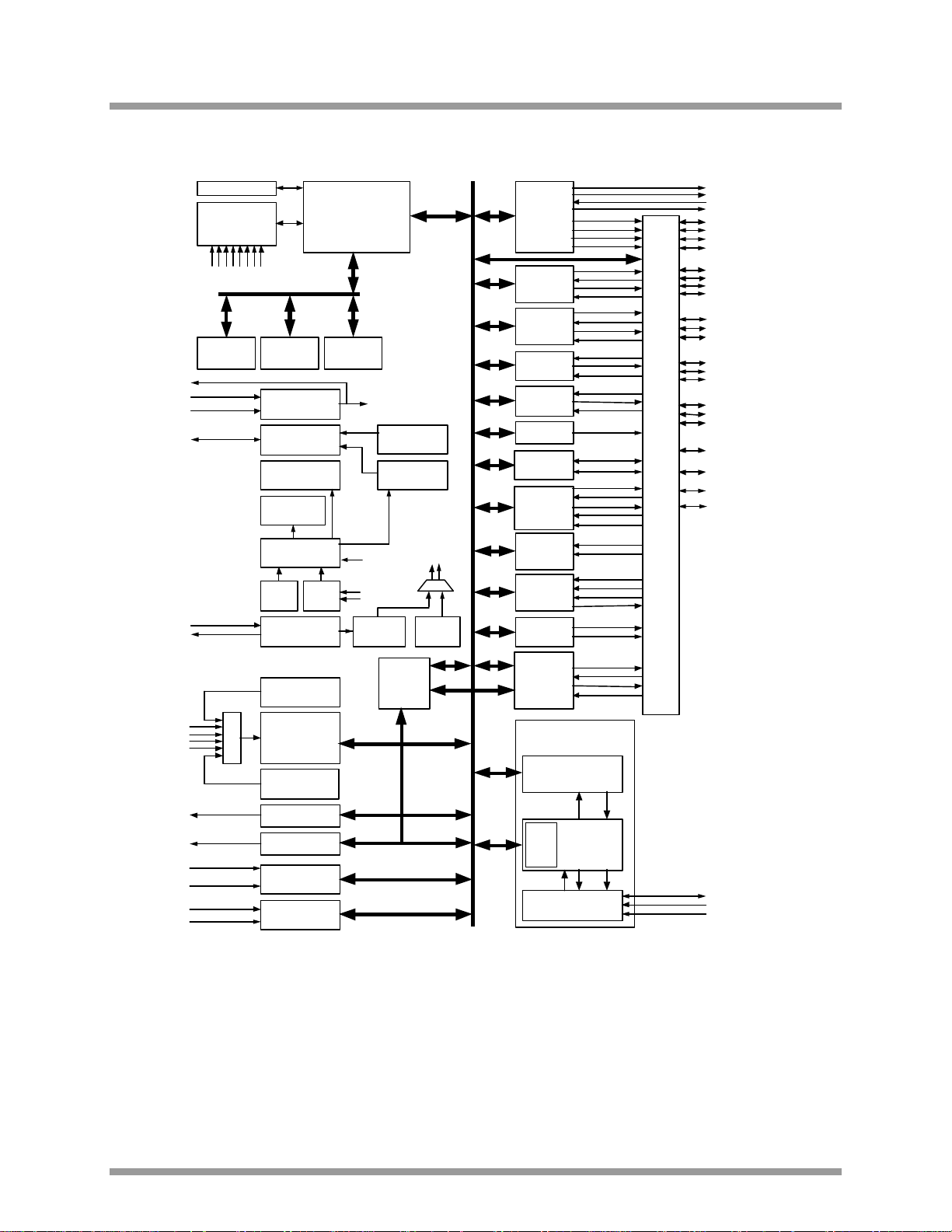
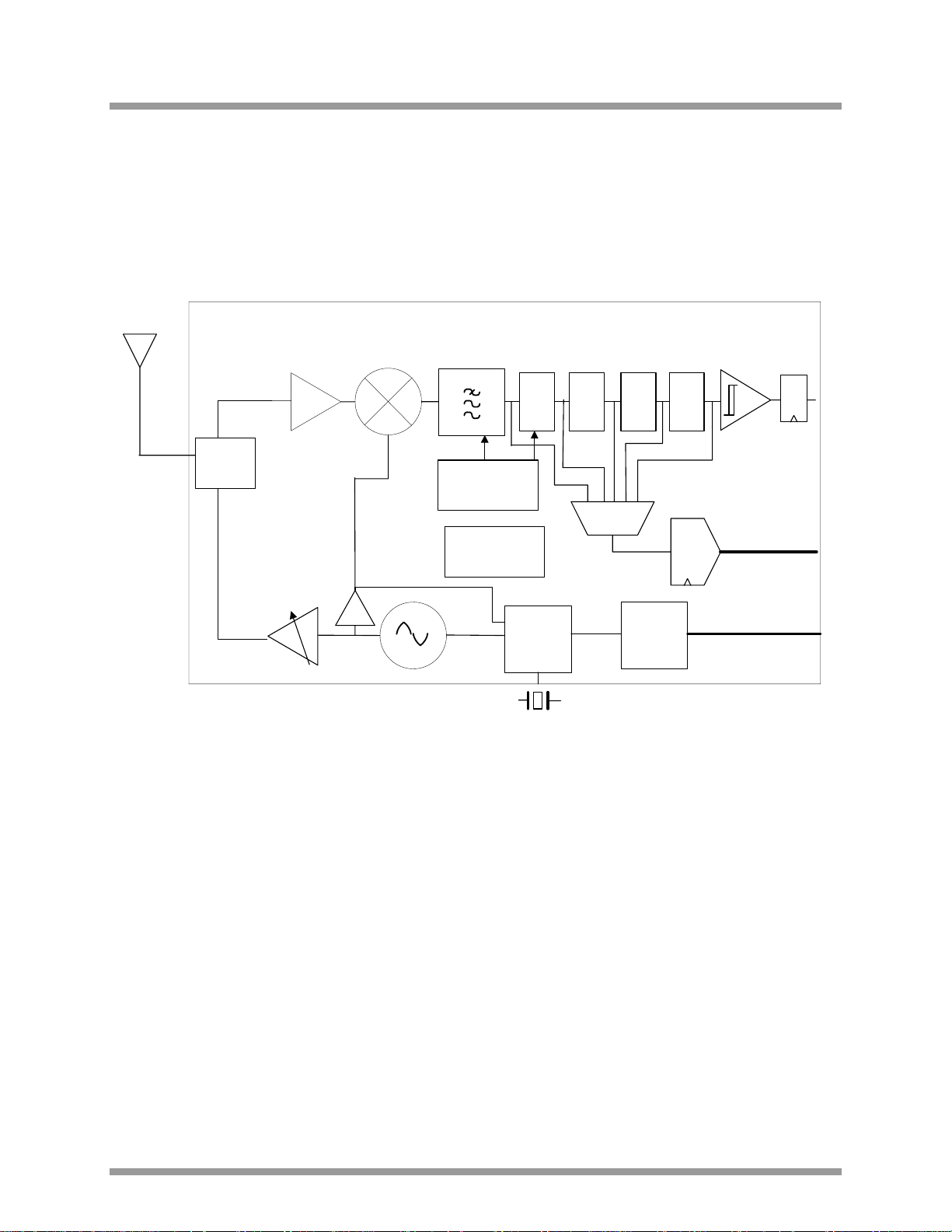
1.4 Block Diagram
VB_XX
VDD1
VDD2
RE SET N
XT A L_IN
XT A L_O UT
Tic k Tim e r
Programm able
Interrupt
Controller
From Pe r i p he r al s
RAM
128kB
32kHz
Os c
Supply Monitor
32-bit RISC CPU
ROM
128kB
Voltage
Regulators
Reset
Wakeup
Tim er0
Wakeup
Tim er1
32kHz Clock
Select
32kHz
RC
Clock
Gen
32MHz Clock
Generator
OTP
eFuse
Cl oc k Divi de r
1.8V
Brow n-out
Detect
Wat chdog
Timer
32KIN
32KXTALIN
32KXTALOUT
Multiplier
Sample
FIFO
CPU and 16MHz
System Clock
24MHz
RC Osc
SPICLK
SPIMOSI
SPI
Mas ter
UART0
UART1
Tim er0
Tim er1
Tim er2
2-wire
Interface
Intelligent
Peripheral
Pulse
Counters
JTAG
Debug
Antenna
Diversity
4-wire
Digital
Audio
Interface
SPISEL1
SPISEL2
SPISEL3
SPISEL4
TXD0
RXD0
RTS0
CTS0
TXD1
RXD1
RTS1
CTS1
TIM0CK_GT
TIM0OUT
TIM0CAP
TIM1CK_GT
TIM1OUT
TIM1CAP
TIM2OUT
SIF_D
SIF_CLK
IP_DO
IP_DI
IP_INT
IP_CLK
IP_SEL
PC0
PC1
JTAG_TDI
JTAG_TMS
JTAG_TCK
JTAG_TDO
ADO
ADE
I2S_OUT
I2S_DIN
I2S_CLK
I2S_SYNC
MUX
SPIMISO
SPISEL0
DI O0/ S PISE L 1
DI O1/ S PISE L 2/P C0
DI O2/ S PISE L 3/ RFRX
DI O3/ S PISE L 4/ RFTX
DIO4/CTS0/JT AG_TCK
DIO5/RTS0/JT AG_TMS
DIO6/TXD0/JTAG_TDO
DIO7/RXD0/JTAG_TDI
DIO8/TIM0CK_GT/P C1
DIO9/TIM0CAP/32KXTALIN/32KIN
DI O1 0/T IM0 OU T /32 KXT ALOU T
DIO11/TIM1CK_GT/T IM2OUT
DIO12/TIM1CAP/ADO/DAI_WS
DI O 1 3 /T IM 1 OU T /A D E/ D A I_ S D IN
DIO14/SIF_CLK/IP_CLK
DIO15/SIF_D/IP_DO
DIO16/RX D1/IP_DI/JTAG_TDI
DI O17 / CTS1 /I P_ SEL /DA I_S CK /
DIO18/RTS1/IP_INT/DAI_SDOUT/
DIO19/TXD1/JTAG_TDO
DIO20/RX D1/JTAG_TDI
JTAG_TCK
JTAG_TMS
ADC1
ADC2
ADC3
ADC4
DAC1
DAC2
COMP 1M/
EXT_PA_B
COMP 1P/
EXT_PA_C
COMP2M
COMP2P
M
U
X
ADC
Temperature
Sensor
Wireless
Transceiver
Security
Coproces sor
DAC1
Time
Digital
DAC2
Comparator1
Comparator2
Of
Baseband
Flight
Radio
RF_IN
VCOT UNE
IBAIS
Figure 1: JN5148 Block Diagram
8 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 9
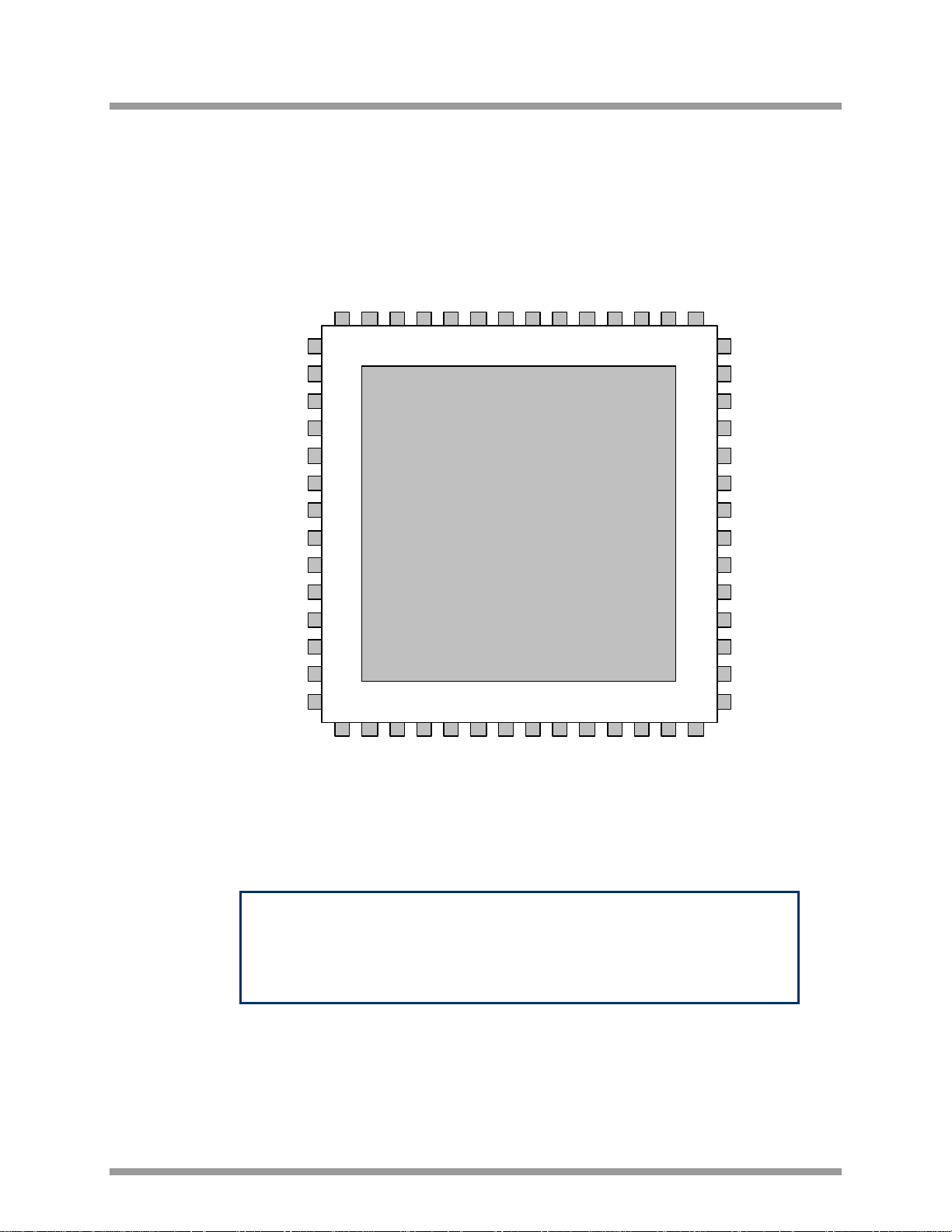
2 Pin Configurations
Jennic
DIO16/RXD 1/IP_DI/JTA G_T DI
DIO17/C TS1/I P_S EL/DAI _SC K/JT AG_TCK
VSS3
DIO18/RTS 1/IP_INT/DAI_SDOUT/JT AG_TMS
DIO19/T XD1/JTA G_TDO
VSS2
VSSS
XTAL_ OUT
XTAL_ IN
VB_SY NTH
VCOTUNE
VB_VCO
VDD1
IBIAS
1
2
3
4
5
6
7
8
9
10
11
12
13
14
DIO15/SIF_D/IP_DO
DIO14/ SIF_C LK/I P_CLK
DIO13/T IM 1OUT/AD E/DA I_SDIN
DIO12/TIM1CAP/ADO/DAI_WS
53
54
55
56
15
16
17
18
DIO10/T IM 0OUT/3 2KXTALOU T
DIO11/TIM1CK_GT/TIM2OUT
51
52
19
20
DIO9/TIM 0C AP/32KXT ALIN/32K IN
50
VSSA
(Paddl e)
21
VDD2
DIO8/TIM 0C K_GT/PC 1
DIO 7/RXD 0/JT AG_TD I
47
48
49
22
23
24
DIO5/RTS0/JTAG_TMS
DIO6/TXD0/JTAG_TDO
45
46
25
26
DIO3/S PISE L4/RF TX
DIO4/CTS0/JTAG_TCK
43
44
27
28
DIO2/SPISEL3/RFRX
42
DIO1/S PISE L2/PC0
41
VB_DIG
40
RESET N
39
DIO0/S PISE L1
38
SPISE L0
37
SPIMOSI
36
VB_RAM
35
SPIMISO
34
SPICLK
33
VSS1
32
DIO20/RXD1/JTAG_TDI
31
30
DAC2
DAC1
29
NC
VREF
RF_IN
VB_RF2
VB_RF
COMP1M
ADC1
ADC2
ADC3
ADC4
COMP1P
COMP2M
VB_A
COMP2P
Figure 2: 56-pin QFN Configuration (top view)
Note: Please refer to Appendix B.4 JN5148 Module Reference
Design for important applications information regarding the
connection of the PADDLE to the PCB.
© Jennic 2009 JN-DS-JN5148-001 1v2 9
Preliminary
Page 10
Jennic
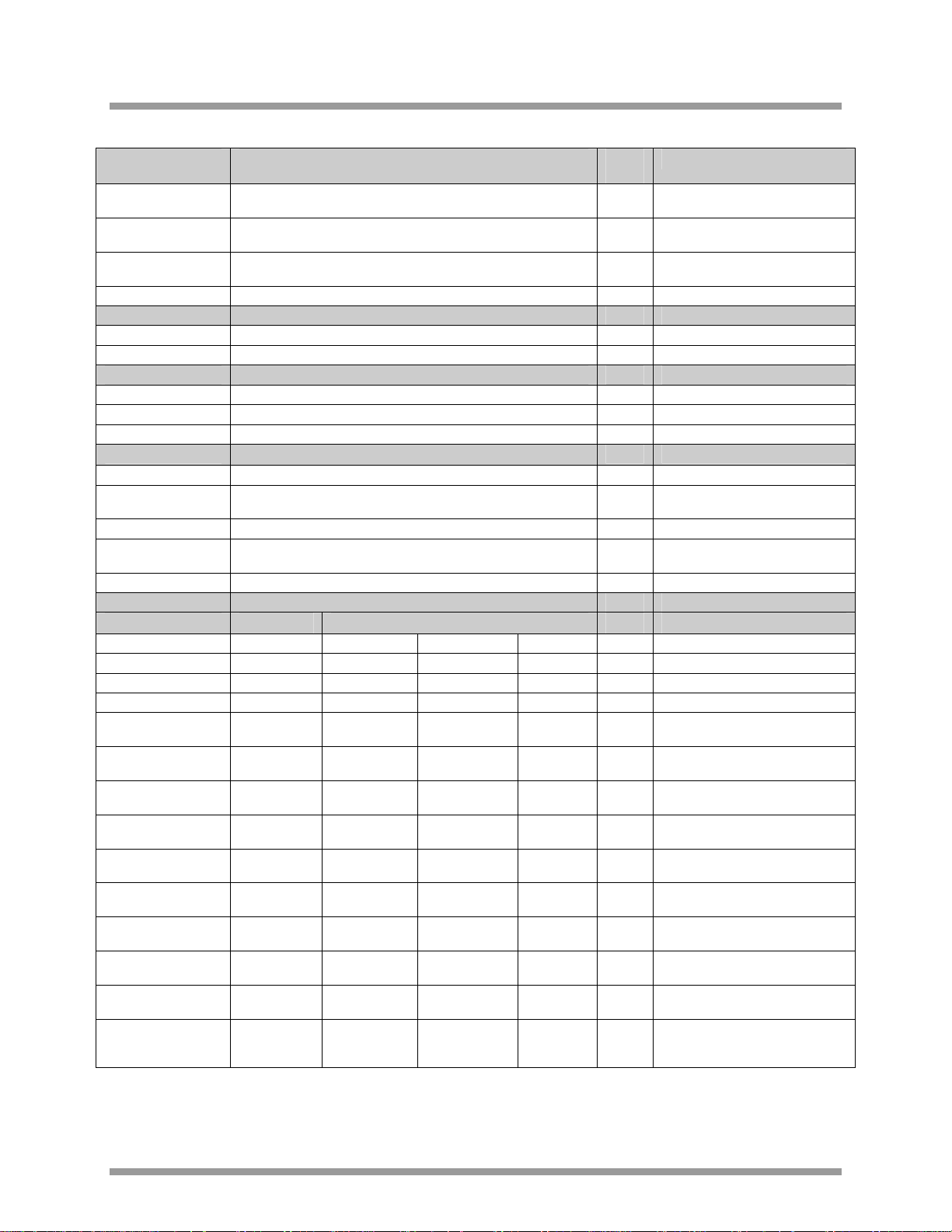
2.1 Pin Assignment
Pin No Power supplies Signal
10, 12, 16, 18, 27,
35, 40
13, 49 VDD1, VDD2 3.3V Supplies: VDD1 for analogue,
32, 6, 3, 7, Paddle VSS1, VSS2, VSS3, VSSS, VSSA 0V Grounds (see appendix A.2 for
28 NC No connect
General
39 RESETN CMOS Reset input
8, 9 XTAL_OUT, XTAL_IN 1.8V System crystal oscillator
Radio
11 VCOTUNE 1.8V VCO tuning RC network
14 IBIAS 1.8V Bias current control
17 RF_IN 1.8V RF antenna
21, 22, 23, 24 ADC1, ADC2, ADC3, ADC4 3.3V ADC inputs
15 VREF 1.8V Analogue peripheral reference
29, 30 DAC1, DAC2 3.3V DAC outputs
19, 20 COMP1M/EXT_PA_B, COMP1P/EXT_PA_C 3.3V Comparator 1 inputs and
25, 26 COMP2M, COMP2P 3.3V Comparator 2 inputs
Digital Peripheral I/O
33 SPICLK CMOS SPI Clock Output
36 SPIMOSI CMOS SPI Master Out Slave In Output
34 SPIMISO CMOS SPI Master In Slave Out Input
37 SPISEL0 CMOS SPI Slave Select Output 0
38 DIO0 SPISEL1 CMOS DIO0 or SPI Slave Select Output
41 DIO1 SPISEL2 PC0 CMOS DIO1, SPI Slave Select Output 2
42 DIO2 SPISEL3 RFRX CMOS DIO2, SPI Slave Select Output 3
43 DIO3 SPISEL4 RFTX CMOS DIO3, SPI Slave Select Output 4
44 DIO4 CTS0 JTAG_TCK CMOS DIO4, UART 0 Clear To Send
45 DIO5 RTS0 JTAG_TMS CMOS DIO5, UART 0 Request To Send
46 DIO6 TXD0 JTAG_TDO CMOS DIO6, UART 0 Transmit Data
47 DIO7 RXD0 JTAG_TDI CMOS DIO7, UART 0 Receive Data
48 DIO8 TIM0CK_GT PC1 CMOS DIO8, Timer0 Clock/Gate Input
50 DIO9 TIM0CAP 32KXTALIN 32KIN CMOS DIO9, Timer0 Capture Input, 32K
VB_SYNTH, VB_VCO, VB_RF2, VB_RF, VB_A, VB_RAM,
VB_DIG
Analogue Peripheral I/O
Primary Alternate Functions
Type
1.8V Regulated supply voltage
Description
VDD2 for digital
paddle details)
voltage
external PA control
1
or Pulse Counter0 Input
or Radio Receive Control Output
or Radio Transmit Control Output
Input or JTAG CLK
Output or JTAG Mode Select
Output or JTAG Data Output
Input or JTAG Data Input
or Pulse Counter1 Input
External Crystal Input or 32K
Clock Input
10 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 11
Jennic
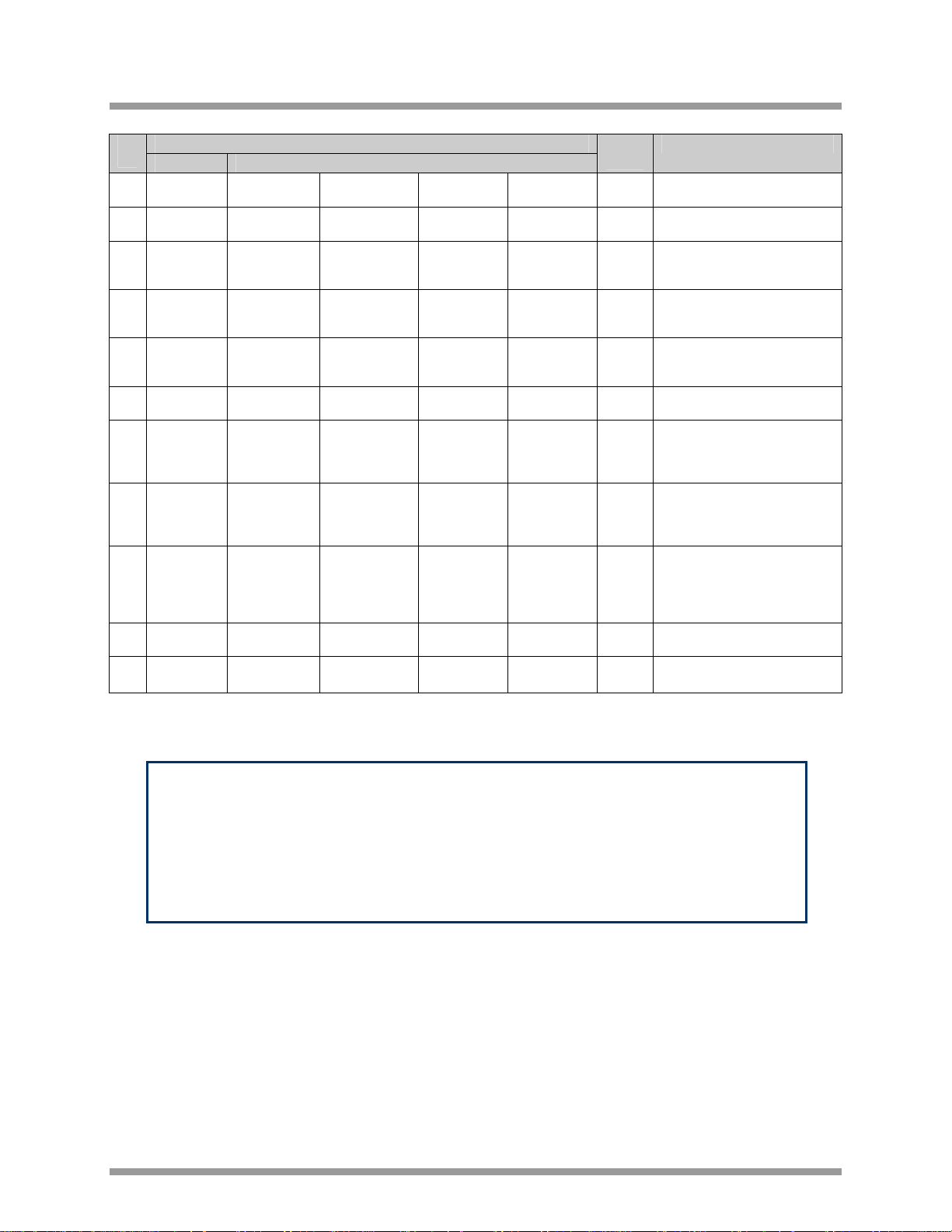
No
Primary Alternate Functions
51 DIO10 TIM0OUT 32KXTALOUT CMOS DIO10, Timer0 PWM Output or
52 DIO11 TIM1CK_GT TIM2OUT CMOS DIO11, Timer1 Clock/Gate
53 DIO12 TIM1CAP ADO DAI_WS CMOS DIO12, Timer1 Capture Input,
54 DIO13 TIM1OUT ADE DAI_SDIN CMOS DIO13, Timer1 PWM Output,
55 DIO14 SIF_CLK IP_CLK CMOS DIO14, Serial Interface Clock
56 DIO15 SIF_D IP_DO CMOS DIO15, Serial Interface Data or
1 DIO16 RXD1
(optional)
2 DIO17 CTS1 IP_SEL DAI_SCK JTAG_TCK CMOS DIO17, UART 1 Clear To Send
4 DIO18 RTS1 IP_INT DAI_SDOUT JTAG_TMS CMOS DIO18, UART 1 Request To
5 DIO19 TXD1 JTAG_TDO CMOS DIO19 or UART 1 Transmit
31 DIO 20 RXD1
(default)
Digital Peripheral I/O Pin
IP_DI JTAG_TDI
(optional)
JTAG_TDI
(default)
Signal
Type
32K External Crystal Output
Input or Timer2 PWM Output
Antenna Diversity or Digital
Audio Word Select
Antenna Diversity or Digital
Audio Data Input
or Intelligent Peripheral Clock
Input
Intelligent Peripheral Data Out
CMOS DIO16, UART 1 Receive Data
Input or Intelligent Peripheral
Data In or JTAG data In
(optional)
Input, Intelligent Peripheral
Device Select Input or Digital
Audio Clock or JTAG CLK
Send Output, Intelligent
Peripheral Interrupt Output or
Digital Audio Data Output or
JTAG Mode Select
Data Output or JTAG Data Out
CMOS DIO 20, UART 1 Receive Data
Input or JTAG data In (default)
Description
The PCB schematic and layout rules detailed in Appendix B.4
must be followed. Failure to do so will likely result in the
JN5148 failing to meet the performance specification detailed
herein and worst case may result in device not functioning in
the end application.
© Jennic 2009 JN-DS-JN5148-001 1v2 11
Preliminary
Page 12

Jennic
2.2 Pin Descriptions
2.2.1 Power Supplies
The device is powered from the VDD1 and VDD2 pins, each being decoupled with a 100nF ceramic capacitor. VDD1
is the power supply to the analogue circuitry; it should be decoupled to ground. VDD2 is the power supply for the
digital circuitry; and should also be decoupled to ground. A 10uF tantalum capacitor is required. Decoupling pins for
the internal 1.8V regulators are provided which require a 100nF capacitor located as close to the device as practical.
VB_VCO, VB_RF, VB_A and VB_SYNTH should be decoupled with an additional 47pF capacitor, while VB_RAM
and VB_DIG require only 100nF. VB_RF and VB_RF2 should be connected together as close to the device as
practical, and only require one 100nF capacitor and one 47pF capacitor. Refer to
VSSA, VSSS, VSS1, VSS2, VSS3 are the ground pins.
2.2.2 Reset
RESETN is a bi-directional active low reset pin that is connected to a 40kΩ internal pull-up resistor. It may be pulled
low by an external circuit, or can be driven low by the JN5148 if an internal reset is generated. Typically, it will be
used to provide a system reset signal. Refer to section 6.2, External Reset, for more details.
2.2.3 32MHz Oscillator
A crystal is connected between XTALIN and XTALOUT to form the reference oscillator, which drives the system
clock. A capacitor to analogue ground is required on each of these pins. Refer to section
for more details. The 32MHz reference frequency is divided down to 16MHz and this is used as the system clock
throughout the device.
B.4.1 for schematic diagram.
5.1 16MHz System Clock
2.2.4 Radio
The radio is a single ended design, requiring a capacitor and just two inductors to match to 50Ω microstrip line to the
RF_IN pin.
An external resistor (43kΩ) is required between IBIAS and analogue ground to set various bias currents and
references within the radio.
12 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 13
Jennic
2.2.5 Analogue Peripherals
Several of the analogue peripherals require a reference voltage to use as part of their operations. They can use
either an internal reference voltage or an external reference connected to VREF. This voltage is referenced to
analogue ground and the performance of the analogue peripherals is dependant on the quality of this reference.
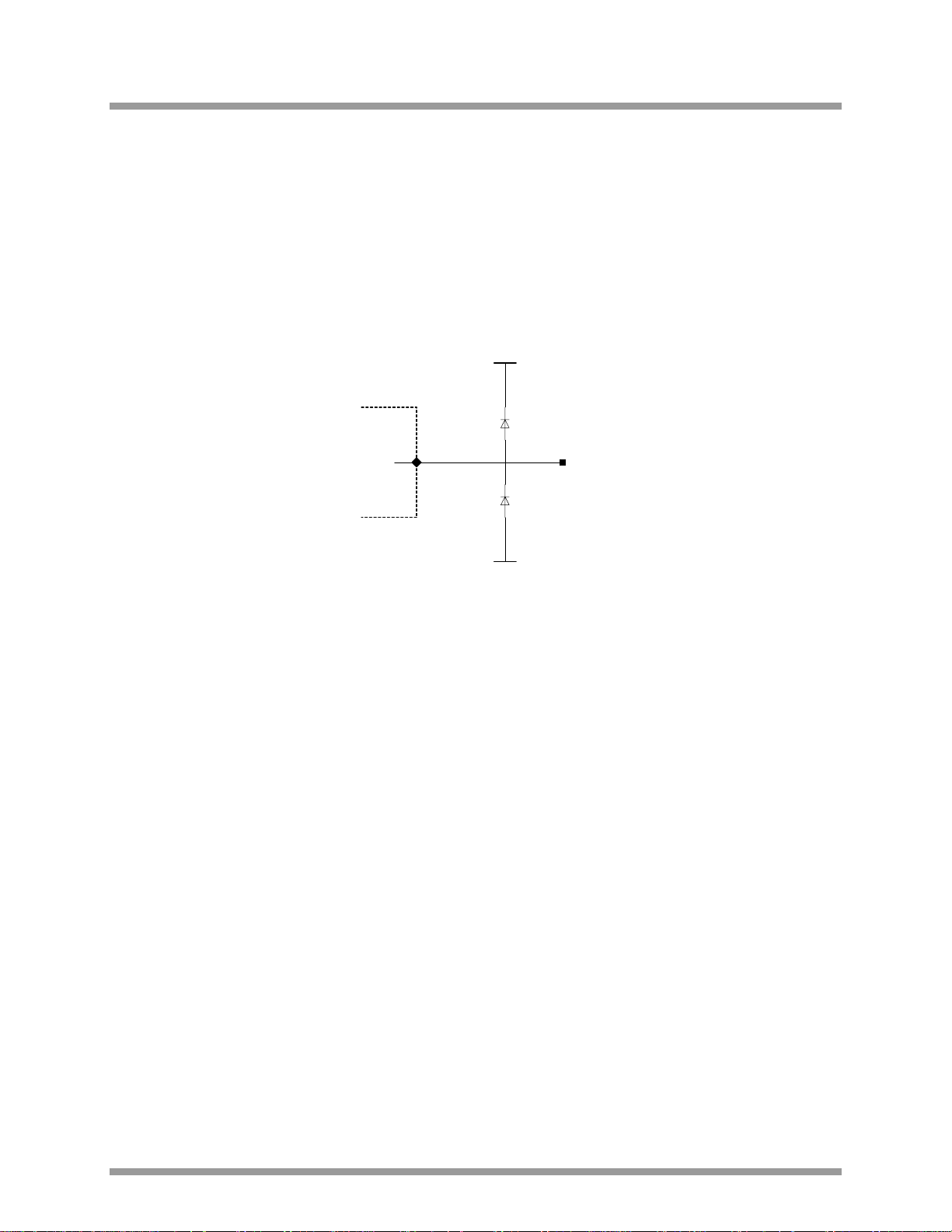
There are four ADC inputs, two pairs of comparator inputs and two DAC outputs. The analogue I/O pins on the
JN5148 can have signals applied up to 0.3v higher than VDD1. A schematic view of the analogue I/O cell is shown in
Figure 3: Analogue I/O Cell
In reset and deep sleep, the analogue peripherals are all off and the DAC outputs are in a high impedance state.
In sleep, the ADC and DACs are off, with the DAC outputs in high impedance state. The comparators may optionally
be used as a wakeup source.
Unused ADC and comparator inputs should be left unconnected.
VDD1
Analogue
Analogue
Peripheral
I/O Pin
VSSA
Figure 3: Analogue I/O Cell
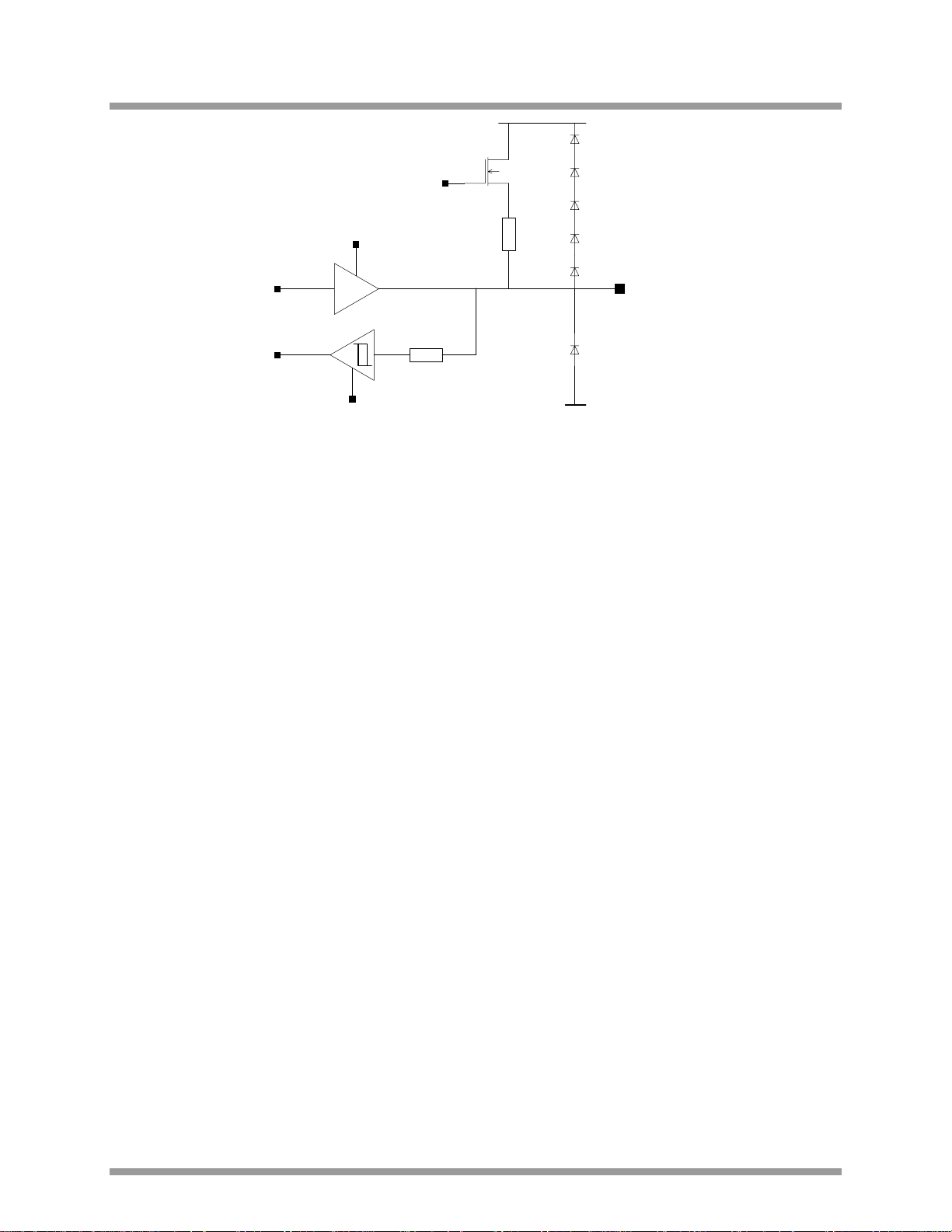
2.2.6 Digital Input/Output
Digital I/O pins on the JN5148 can have signals applied up to 2V higher than VDD2 (with the exception of pins DIO9
and DIO10 that are 3V tolerant) and are therefore TTL-compatible with VDD2 > 3V. For other DC properties of these
pins see section 22.2.3 I/O Characteristics.
When used in their primary function all Digital Input/Output pins are bi-directional and are connected to weak internal
pull up resistors (40kΩ nominal) that can be disabled. When used in their secondary function (selected when the
appropriate peripheral block is enabled through software library calls) then their direction is fixed by the function. The
pull up resistor is enabled or disabled independently of the function and direction; the default state from reset is
enabled.
A schematic view of the digital I/O cell is in
Figure 4: DIO Pin Equivalent Schematic.
© Jennic 2009 JN-DS-JN5148-001 1v2 13
Preliminary
Page 14
Jennic
VDD2
Pu
OE
O
R
I
IE
PROT
R
PU
DIO[x] Pin
VSS
Figure 4: DIO Pin Equivalent Schematic
In reset, the digital peripherals are all off and the DIO pins are set as high-impedance inputs. During sleep and deep
sleep, the DIO pins retain both their input/output state and output level that was set as sleep commences. If the DIO
pins were enabled as inputs and the interrupts were enabled then these pins may be used to wake up the JN5148
from sleep.
14 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 15

Jennic
3 CPU
The CPU of the JN5148 is a 32-bit load and store RISC processor. It has been architected for three key
requirements:
• Low power consumption for battery powered applications
• High performance to implement a wireless protocol at the same time as complex applications
• Efficient coding of high-level languages such as C provided with the Jennic Software Developers Kit
It features a linear 32-bit logical address space with unified memory architecture, accessing both code and data in the
same address space. Registers for peripheral units, such as the timers, UARTs and the baseband processor are
also mapped into this space.
The CPU has access to a block of 15 32-bit General-Purpose (GP) registers together with a small number of special
purpose registers which are used to store processor state and control interrupt handling. The contents of any GP
register can be loaded from or stored to memory, while arithmetic and logical operations, shift and rotate operations,
and signed and unsigned comparisons can be performed either between two registers and stored in a third, or
between registers and a constant carried in the instruction. Operations between general or special-purpose registers
execute in one cycle while those that access memory require a further cycle to allow the memory to respond.
The instruction set manipulates 8, 16 and 32-bit data; this means that programs can use objects of these sizes very
efficiently. Manipulation of 32-bit quantities is particularly useful for protocols and high-end applications allowing
algorithms to be implemented in fewer instructions than on smaller word-size processors, and to execute in fewer
clock cycles. In addition, the CPU supports hardware Multiply that can be used to efficiently implement algorithms
needed by Digital Signal Processing applications.
The instruction set is designed for the efficient implementation of high-level languages such as C. Access to fields in
complex data structures is very efficient due to the provision of several addressing modes, together with the ability to
be able to use any of the GP registers to contain the address of objects. Subroutine parameter passing is also made
more efficient by using GP registers rather than pushing objects onto the stack. The recommended programming
method for the JN5148 is by using C, which is supported by a software developer kit comprising a C compiler, linker
and debugger.
The CPU architecture also contains features that make the processor suitable for embedded, real-time applications.
In some applications, it may be necessary to use a real-time operating system to allow multiple tasks to run on the
processor. To provide protection for device-wide resources being altered by one task and affecting another, the
processor can run in either supervisor or user mode, the former allowing access to all processor registers, while the
latter only allows the GP registers to be manipulated. Supervisor mode is entered on reset or interrupt; tasks starting
up would normally run in user mode in a RTOS environment.
Embedded applications require efficient handling of external hardware events. Exception processing (including reset
and interrupt handling) is enhanced by the inclusion of a number of special-purpose registers into which the PC and
status register contents are copied as part of the operation of the exception hardware. This means that the essential
registers for exception handling are stored in one cycle, rather than the slower method of pushing them onto the
processor stack. The PC is also loaded with the vector address for the exception that occurred, allowing the handler
to start executing in the next cycle.
To improve power consumption a number of power-saving modes are implemented in the JN5148, described more
fully in section
software control, the processor can be shut down and on an interrupt it will wake up to service the request.
Additionally, it is possible under software control, to set the speed of the CPU to 4, 8, 16 or 32MHz. This feature can
be used to trade-off processing power against current consumption.
21 - Power Management and Sleep Modes. One of these modes is the CPU doze mode; under
© Jennic 2009 JN-DS-JN5148-001 1v2 15
Preliminary
Page 16
Jennic
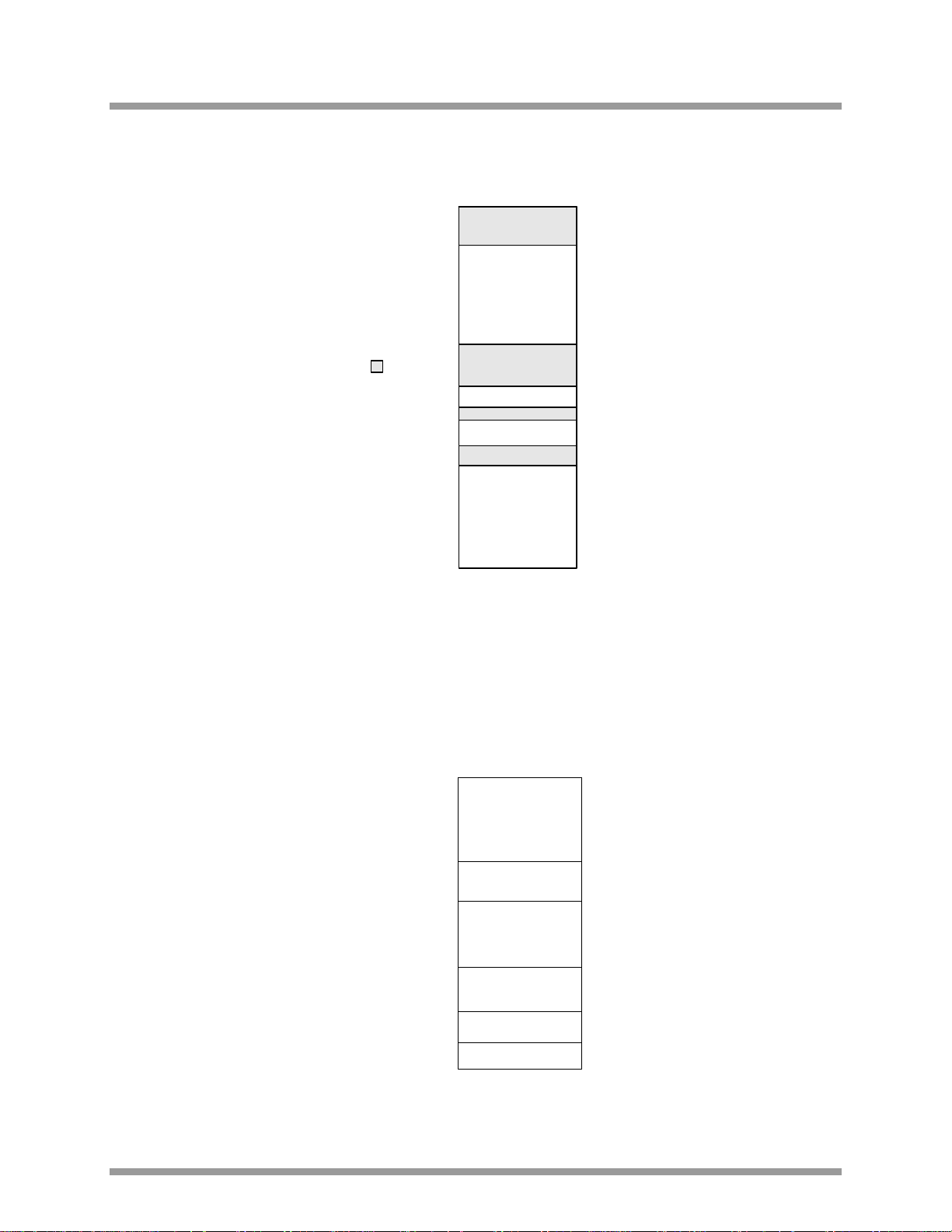
4 Memory Organisation
This section describes the different memories found within the JN5148. The device contains ROM, RAM, OTP eFuse
memory, the wireless transceiver and peripherals all within the same linear address space.
0xFFFFFFFF
0xF0020000
RAM
(128kB)
0xF0000000
Unpopulated
0x04000000
0x02000000
0x00020000
0x00000000
RAM Ec ho
Peripherals
ROM
(128kB)
Figure 5: JN5148 Memory Map
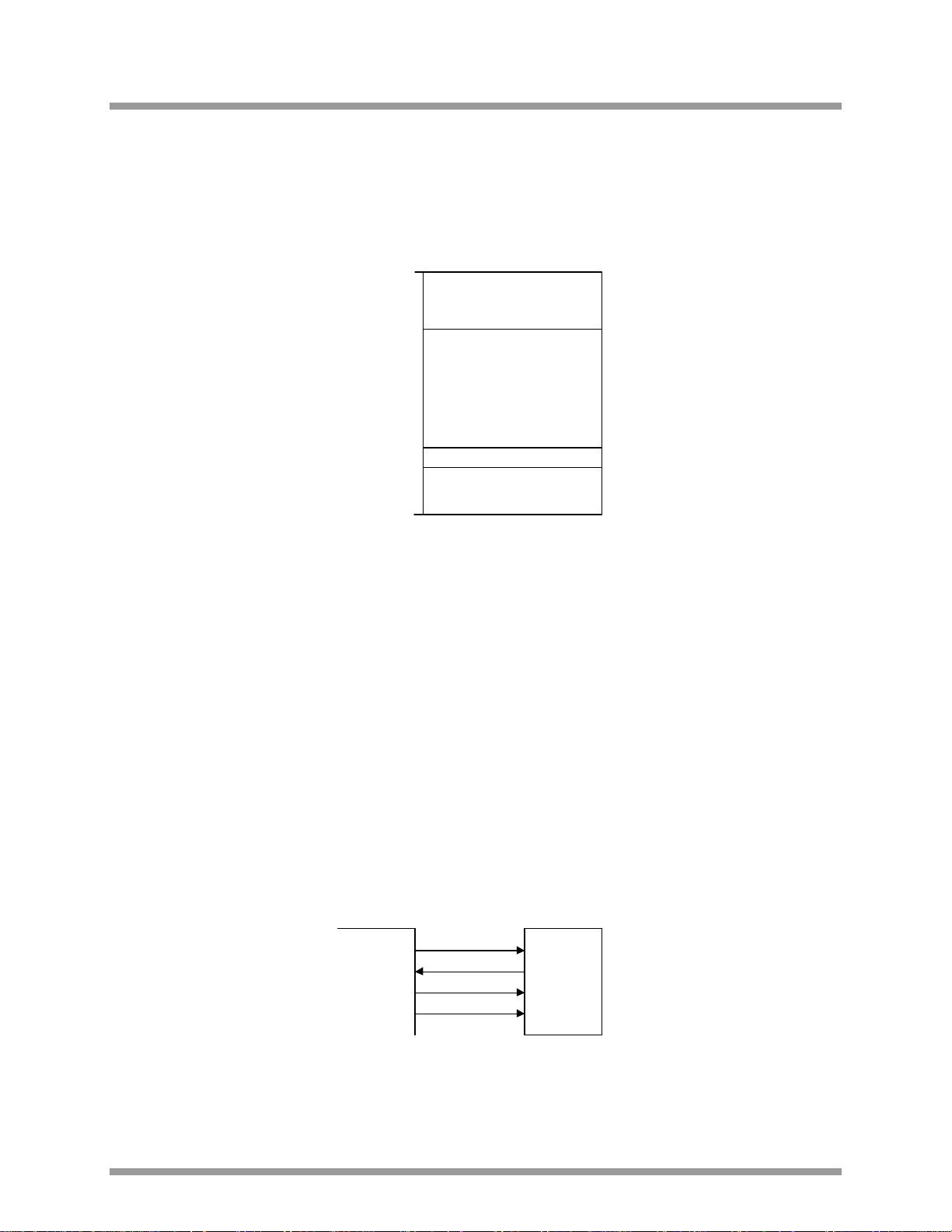
4.1 ROM
The ROM is 128k bytes in size, and can be accessed by the processor in a single CPU clock cycle. The ROM
contents include bootloader to allow external Flash memory contents to be bootloaded into RAM at runtime, a default
interrupt vector table, an interrupt manager, IEEE802.15.4 MAC and APIs for interfacing on-chip peripherals. The
operation of the boot loader is described in detail in Application Note
to the application’s soft interrupt vector table contained within RAM. Section
the handling of interrupts. ROM contents are shown in
0x00020000
Figure 6.
[8]. The interrupt manager routes interrupt calls
7 contains further information regarding
Spare
APIs
IEEE802.15.4
Stack
Boot Loader
Interrupt Manager
0x00000000
Interrupt Vectors
Figure 6: Typical ROM contents
16 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 17
Jennic
4.2 RAM
The JN5148 contains 128kBytes of high speed RAM. It can be used for both code and data storage and is accessed
by the CPU in a single clock cycle. At reset, a boot loader controls the loading of segments of code and data from an
external memory connected to the SPI port, into RAM. Software can control the power supply to the RAM allowing
the contents to be maintained during a sleep period when other parts of the device are un-powered. Typical RAM
contents are shown in Figure 7.
0x04020000
CPU Stack
(Grows D own)
Application
MAC Address
MAC Data
Interrupt Vector Table
0x04000000
Figure 7: Typical RAM Contents
4.3 OTP eFuse Memory
The JN5148 contains a total of 32bytes of eFuse memory; this is a One Time Programmable (OTP) memory that is
used to support on chip 64-bit MAC ID and a 128-bit AES security key. A limited number of bits are available for
customer use for storage of configuration information; configuration of these is made through use of software APIs.
For full details on how to program and use the eFuse memory, please refer to application note
OTP efuse Memory
Alternatively, Jennic can provide an eFuse programming service for customers that wish to use the eFuse but do not
wish to undertake this for themselves. For further details of this service, please contact your local Jennic sales office.
[2]
JN-AN-1062 Using
4.4 External Memory
An external memory with an SPI interface may be used to provide storage for program code and data for the device
when external power is removed. The memory is connected to the SPI interface using select line SPISEL0; this
select line is dedicated to the external memory interface and is not available for use with other external devices. See
Figure 8 for connection details.
JN5148
SPIS EL0
SPIMISO
SPIMOSI
SPICLK
Figure 8: Connecting External Serial Memory
Serial
Me mo ry
SS
SDO
SDI
CLK
© Jennic 2009 JN-DS-JN5148-001 1v2 17
Preliminary
Page 18
Jennic
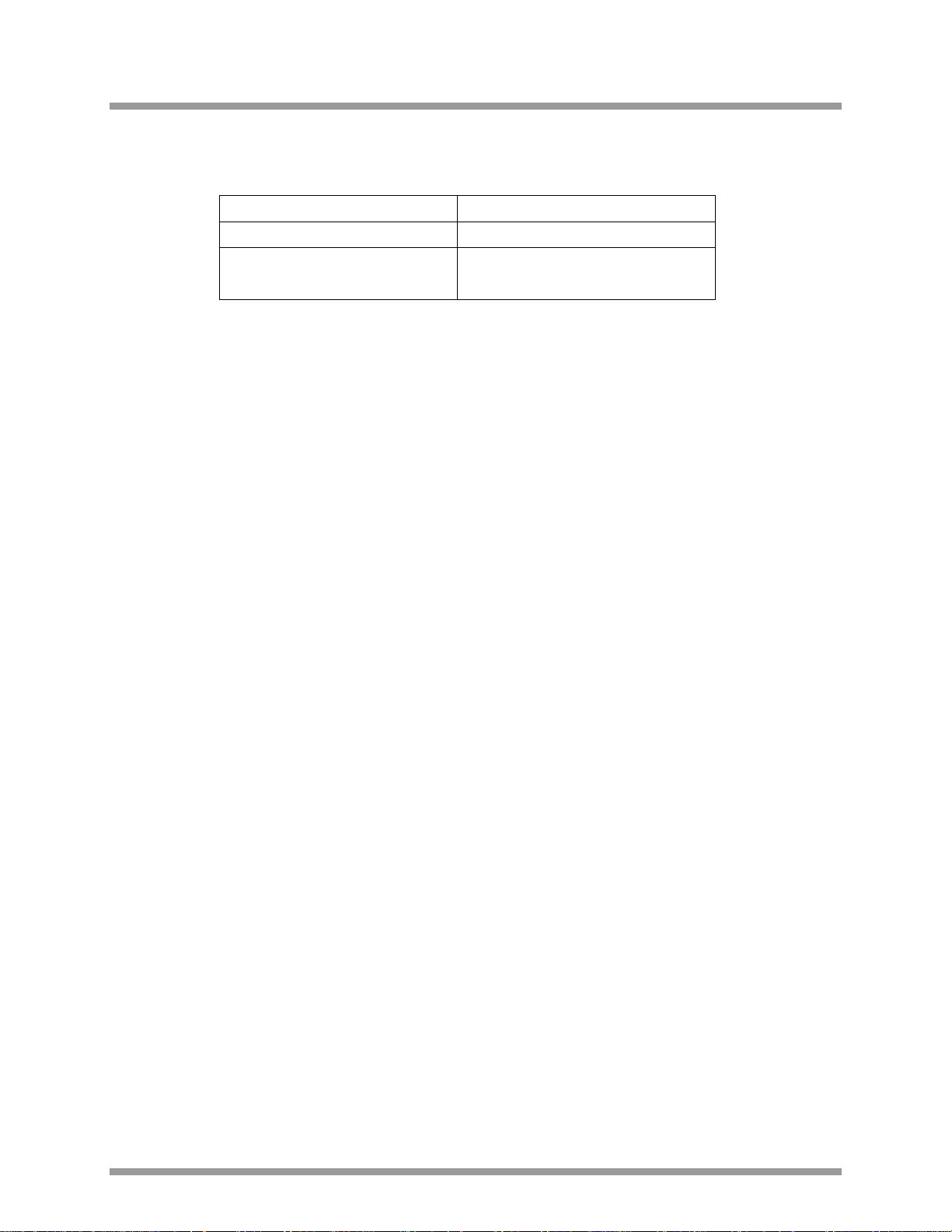
At reset, the contents of this memory are copied into RAM by the software boot loader. The Flash memory devices
that are supported as standard through the JN5148 bootloader are given in Table 1. Jennic recommends that where
possible one of these devices should be selected.
Manufacturer Device Number
SST (Silicon Storage Technology) 25VF010A (1Mbyte device)
Numonyx M25P10-A (1Mbyte device),
M25P40 (4Mbyte device)
Table 1: Supported Flash Memories
Applications wishing to use an alternate Flash memory device should refer to application note [3] JN-AN-1038
Programming Flash devices not supported by the JN51xx ROM-based bootloader. This application note provides
guidance on developing an interface to an alternate device.
4.4.1 External Memory Encryption
The contents of the external serial memory may be encrypted. The AES security processor combined with a user
programmable 128-bit encryption key is used to encrypt the contents of the external memory. The encryption key is
stored in eFuse.
When bootloading program code from external serial memory, the JN5148 automatically accesses the encryption key
to execute the decryption process. User program code does not need to handle any of the decryption process; it is
transparent.
With encryption enabled, the time taken to boot code from external flash is increased.
4.5 Peripherals
All peripherals have their registers mapped into the memory space. Access to these registers requires 3 clock
cycles. Applications have access to the peripherals through the software libraries that present a high-level view of
the peripheral’s functions through a series of dedicated software routines. These routines provide both a tested
method for using the peripherals and allow bug-free application code to be developed more rapidly. For details, see
the Integrated Peripherals API Reference Manual (JN-RM-2001).[6]
4.6 Unused Memory Addresses
Any attempt to access an unpopulated memory area will result in a bus error exception (interrupt) being generated.
18 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 19
Jennic
5 System Clocks
Two system clocks are used to provide timing references into the on-chip subsystems of the JN5148. A 16MHz clock,
generated by a crystal-controlled 32MHz oscillator, is used by the transceiver, processor, memory and digital and
analogue peripherals. A 32kHz clock is used by the sleep timer and during the startup phase of the chip.
5.1 16MHz System Clock
The 16MHz system clock is used by the digital and analogue peripherals and the transceiver. A scaled version
(4,8,16 or 32MHz) of this clock is also used by the processor and memories. For most operations it is necessary to
source this clock from the 32MHz oscillator.
Crystal oscillators are generally slow to start. Hence to provide a faster start-up following a sleep cycle a fast RC
oscillator is provided that can be used as the source for the 16MHz system clock. The oscillator starts very quickly
and is typically 24MHz causing the system clock to run at 12MHz. Using a clock of this speed scales down the speed
of the processor and any peripherals in use. For the SPI interface this causes no functional issues as the generated
SPI clock is slightly slower and is used to clock the external SPI slave. Use of the radio is not possible when using the
24MHz RC oscillator. Additionally, timers and UARTs should not be used as the exact frequency will not be known.
The JN5148 device can be configured to wake up from sleep using the fast RC oscillator and automatically switch
over to use the 32MHz xtal as the clock source, when it has started up. This could allow application code to be
downloaded from the flash before the xtal is ready, typically improving start-up time by 550usec. Alternatively, the
switch over can be controlled by software, or the system could always use the 32MHz oscillator as the clock source.
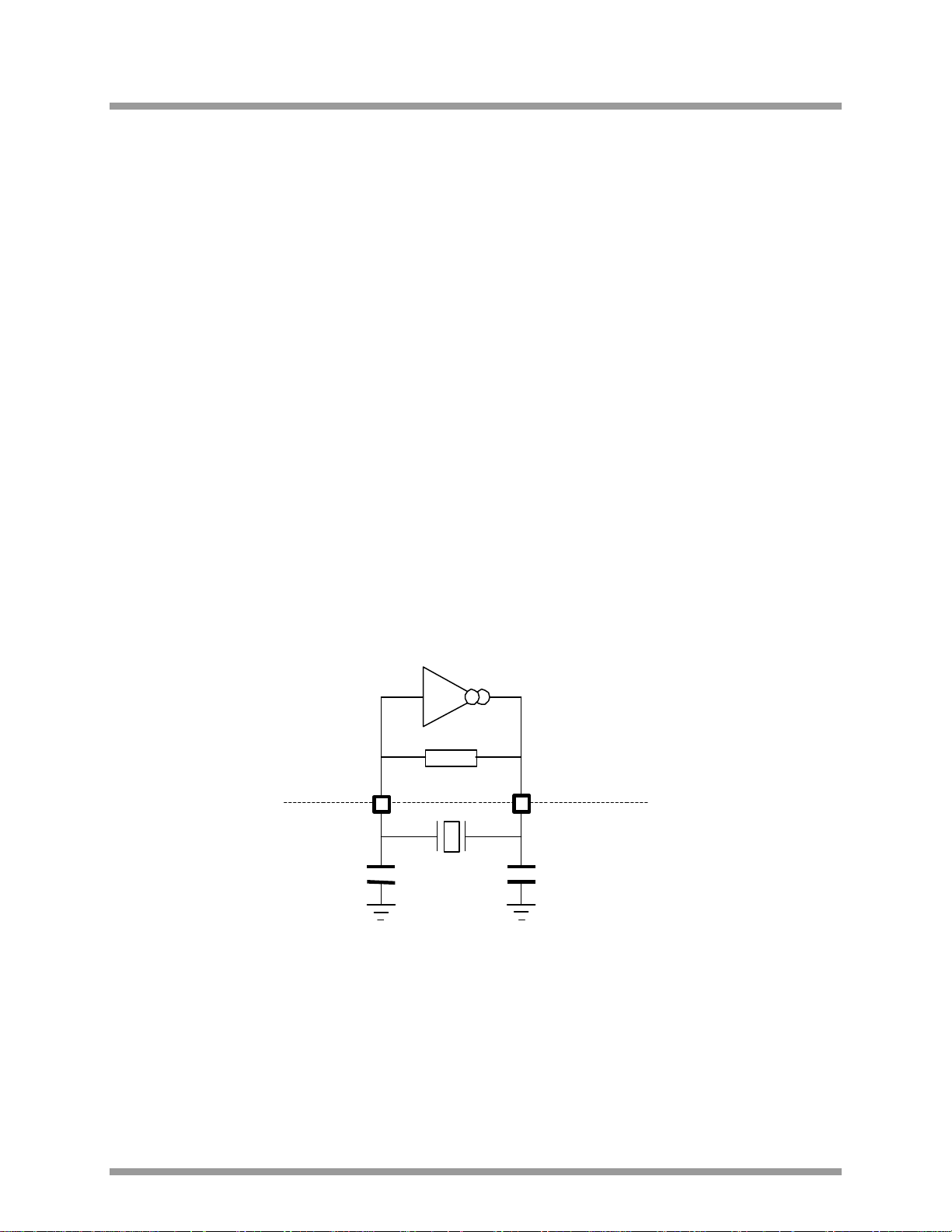
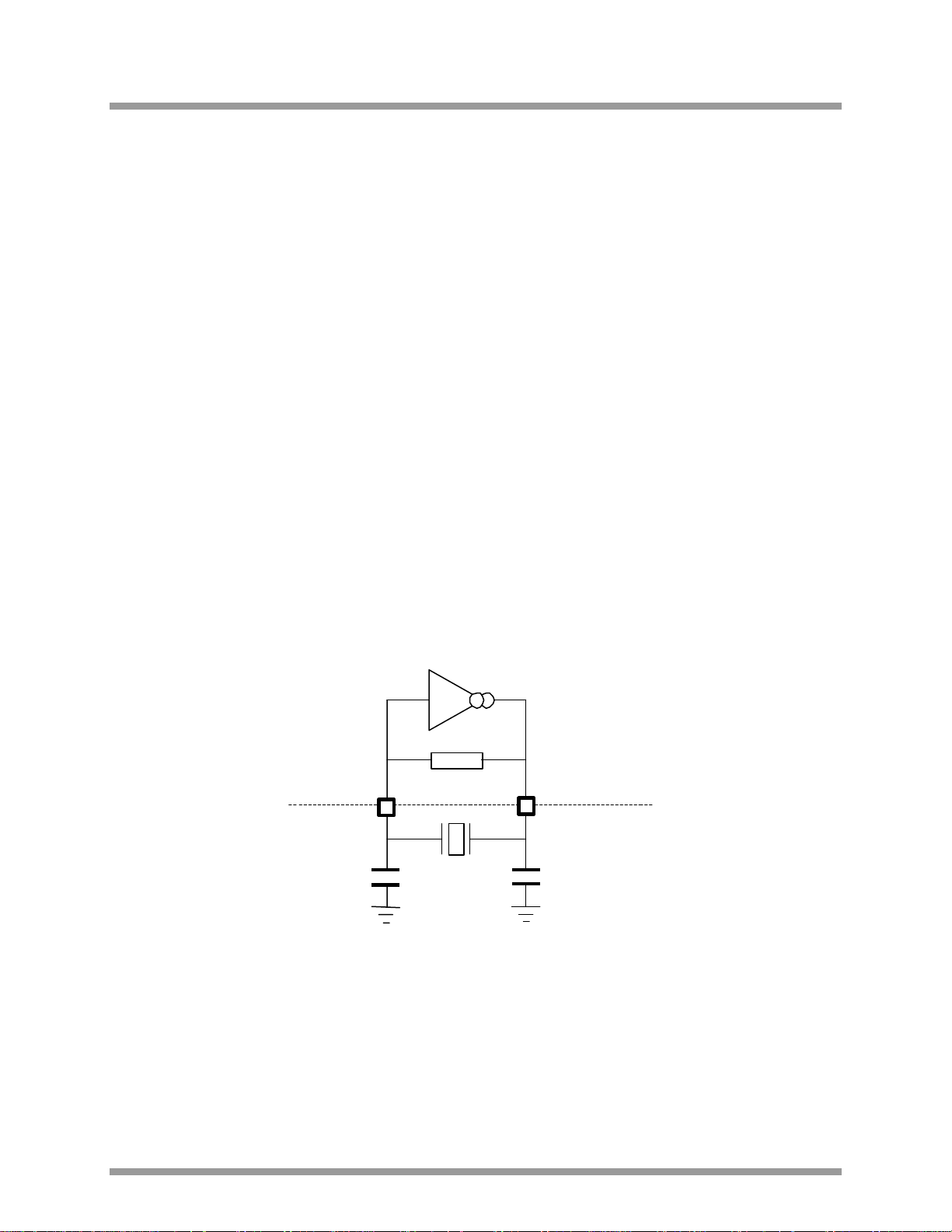
5.1.1 32MHz Oscillator
The JN5148 contains the necessary on chip components to build a 32MHz reference oscillator with the addition of an
external crystal resonator and two tuning capacitors. The schematic of these components are shown in
The two capacitors, C1 and C2, should typically be 15pF and use a COG dielectric. Due to the small size of these
capacitors, it is important to keep the traces to the external components as short as possible. The on chip
transconductance amplifier is compensated for temperature variation, and is self-biasing by means of the internal
resistor R1. The electrical specification of the oscillator can be found in section 22.3.13. Please refer to Appendix B
for development support with the crystal oscillator circuit.
Figure 9.
JN5148
XTALIN
Figure 9: 32MHz Crystal Oscillator Connections
R1
XTALOUT
C2 C1
5.1.2 24MHz RC Oscillator
An on-chip 24MHz RC oscillator is provided. No external components are required for this oscillator. The electrical
specification of the oscillator can be found in section
© Jennic 2009 JN-DS-JN5148-001 1v2 19
22.3.14.
Preliminary
Page 20
Jennic
5.2 32kHz System Clock
The 32kHz system clock is used for timing the length of a sleep period (see section 21 Power Management and
Sleep Modes) and also to generate the system clock used internally during reset. The clock can be selected from
one of three sources through the application software:
32kHz RC Oscillator
•
32kHz Crystal Oscillator
•
• 32kHz External Clock
Upon a chip reset or power-up the JN5148 defaults to using the internal 32kHz RC Oscillator. If another clock source
is selected then it will remain in use for all 32kHz timing until a chip reset is performed.
5.2.1 32kHz RC Oscillator
The internal 32kHz RC oscillator requires no external components. The internal timing components of the oscillator
have a wide tolerance due to manufacturing process variation and so the oscillator runs nominally at 32kHz ±30%. To
make this useful as a timing source for accurate wakeup from sleep, a frequency calibration factor derived from the
more accurate 16MHz clock may be applied. The calibration factor is derived through software, details can be found
in section 11.3.1. For detailed electrical specifications, see section 22.3.11.
5.2.2 32kHz Crystal Oscillator
In order to obtain more accurate sleep periods, the JN5148 contains the necessary on-chip components to build a
32kHz oscillator with the addition of an external 32.768kHz crystal and two tuning capacitors. The crystal should be
connected between 32KXTALIN and 32KXTALOUT (DIO9 and DIO10), with two equal capacitors to ground, one on
each pin. Due to the small size of the capacitors, it is important to keep the traces to the external components as
short as possible.
The electrical specification of the oscillator can be found in section 22.3.12. The oscillator cell is flexible and can
operate with a range of commonly available 32.768kHz crystals with load capacitances from 6 to 12.5pF. However,
the maximum ESR of the crystal and the supply current are both functions of the actual crystal used, see appendix
B.1 for more details.
JN5148
32KXTALOUT 32KXTALIN
Figure 10: 32kHz crystal oscillator connections
5.2.3 32kHz External Clock
An externally supplied 32kHz reference clock on the 32KIN input (DIO9) may be provided to the JN5148. This would
allow the 32kHz system clock to be sourced from a very stable external oscillator module, allowing more accurate
sleep cycle timings compared to the internal RC oscillator. (See section
tolerant input)
20 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
22.2.3 I/O Characteristics, DIO9 is a 3V
Page 21
Jennic
6 Reset
A system reset initialises the device to a pre-defined state and forces the CPU to start program execution from the
reset vector. The reset process that the JN5148 goes through is as follows.
When power is applied, the 32kHz RC oscillator starts up and stabilises, which takes approximately 100μsec. At this
point, the 32MHz crystal oscillator is enabled and power is applied to the processor and peripheral logic. The logic
blocks are held in reset until the 32MHz crystal oscillator stabilises, typically this takes 0.75ms. Then the internal
reset is removed from the CPU and peripheral logic and the CPU starts to run code beginning at the reset vector,
consisting of initialisation code and the resident boot loader. [8] Section 22.3.1 provides detailed electrical data and
timing.
The JN5148 has five sources of reset:
• Internal Power-on Reset
• External Reset
• Software Reset
• Watchdog timer
• Brown-out detect
Note: When the device exits a reset condition, device operating
parameters (voltage, frequency, temperature, etc.) must be met to ensure
operation. If these conditions are not met, then the device must be held in
reset until the operating conditions are met. (See section 22.3)
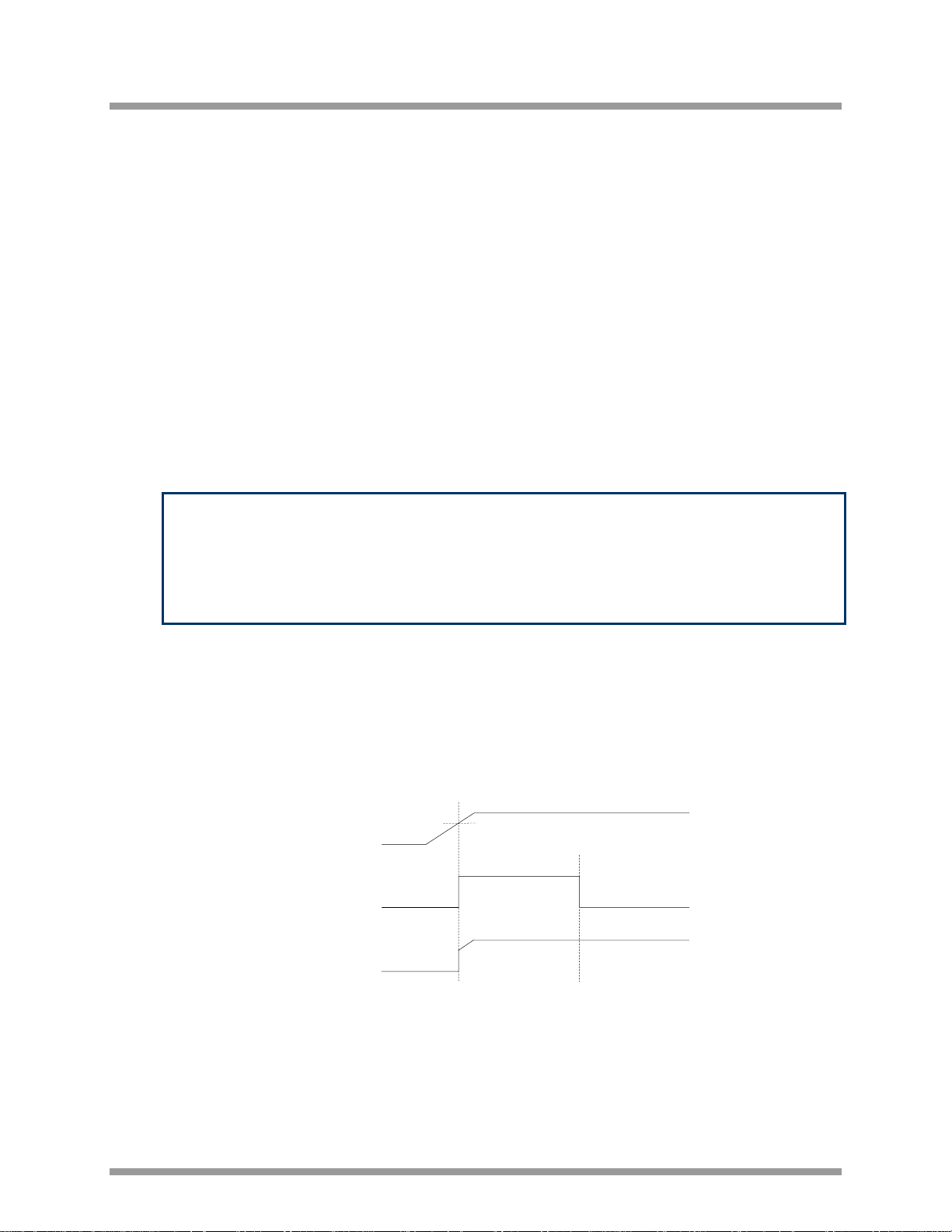
6.1 Internal Power-on Reset
For the majority of applications the internal power-on reset is capable of generating the required reset signal. When
power is applied to the device, the power-on reset circuit monitors the rise of the VDD supply. When the VDD
reaches the specified threshold, the reset signal is generated and can be observed as a rising edge on the RESETN
pin. This signal is held internally until the power supply and oscillator stabilisation time has elapsed, when the internal
reset signal is then removed and the CPU is allowed to run.
VDD
Internal RESET
RESETN Pin
Figure 11: Internal Power-on Reset
When the supply drops below the power on reset ‘falling’ threshold, it will re-trigger the reset. Use of the external
reset circuit show in
Figure 12 is suggested.
© Jennic 2009 JN-DS-JN5148-001 1v2 21
Preliminary
Page 22
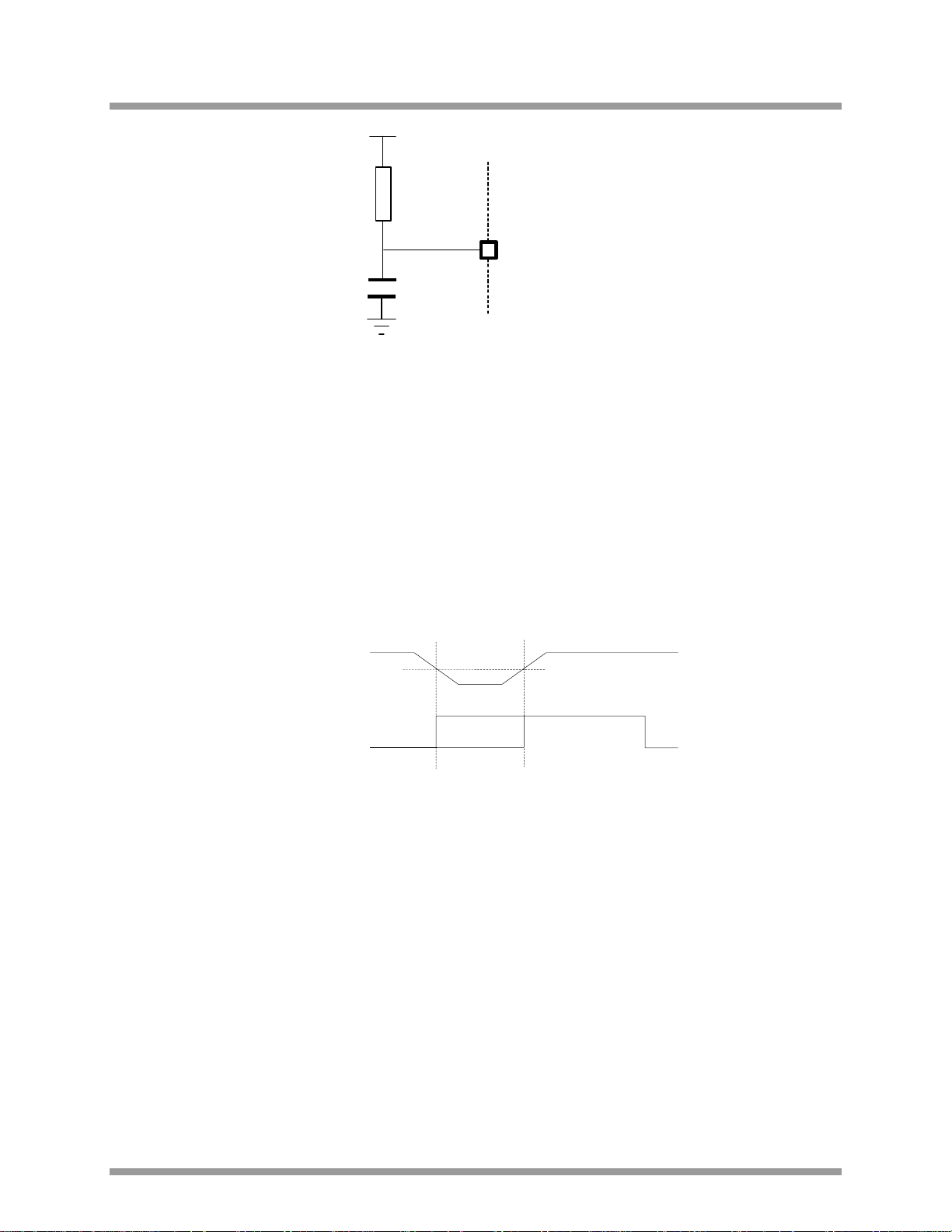
Jennic
R1
VDD
JN5148
18k
RESETN
C1
Figure 12: External Reset Generation
The external resistor and capacitor provide a simple reset operation when connected to the RESETN pin.
470nF
6.2 External Reset
An external reset is generated by a low level on the RESETN pin. Reset pulses longer than the minimum pulse width
will generate a reset during active or sleep modes. Shorter pulses are not guaranteed to generate a reset. The
JN5148 is held in reset while the RESETN pin is low. When the applied signal reaches the Reset Threshold Voltage
) on its positive edge, the internal reset process starts.
(V
RST
Multiple devices may connect to the RESETN pin in an open-collector mode. The JN5148 has an internal pull-up
resistor connect to the RESETN pin. The pin is an input for an external reset, an output during the power-on reset
and may optionally be an output during a software reset. No devices should drive the RESETN pin high.
RESETN pin
Reset
Internal Reset
Figure 13: External Reset
6.3 Software Reset
A system reset can be triggered at any time through software control, causing a full chip reset and invalidating the
RAM contents. For example this can be executed within a user’s application upon detection of a system failure. When
performing the reset, the RESETN pin is driven low for 1µsec; depending on the external components this may or
may not be visible on the pin.
In addition, the RESETN line can be driven low by the JN5148 to provide a reset to other devices in the system (e.g.
external sensors) without resetting itself. When the RESETN line is not driven it will pull back high through either the
internal pull-up resistor or any external circuitry. It is essential to ensure that the RESETN line pulls back high within
100µsec after the JN5148 stops driving the line; otherwise a system reset will occur. Due to this, careful consideration
should be taken of any capacitance on this line. For instance, the RC values recommended in section
to be replaced with a suitable reset IC
22 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
6.1 may need
Page 23

Jennic
6.4 Brown-out Detect
An internal brown-out detect module is used to monitor the supply voltage to the JN5148; this can be used whilst the
device is awake or is in CPU doze mode. Dips in the supply voltage below a variable threshold can be detected and
can be used to cause the JN5148 to perform a chip reset. Equally, dips in the supply voltage can be detected and
used to cause an interrupt to the processor, when the voltage either drops below the threshold or rises above it.
The brown-out detect is enabled by default from power-up and can extend the reset during power-up. This will keep
the CPU in reset until the voltage exceeds the brown-out threshold voltage. The threshold voltage is configurable to
2.0V, 2.3V, 2.7V and 3.0V and is controllable by software. From power-up the threshold is set by eFuse settings and
the default chip configuration is for the 2.3V threshold. It is recommended that the threshold is set so that, as a
minimum, the chip is held in reset until the voltage reaches the level required by the external memory device on the
SPI interface.
6.5 Watchdog Timer
A watchdog timer is provided to guard against software lockups. It operates by counting cycles of the 32kHz system
clock. A pre-scaler is provided to allow the expiry period to be set between typically 8ms and 16.4 seconds. Failure
to restart the watchdog timer within the pre-configured timer period will cause a chip reset to be performed. A status
bit is set if the watchdog was triggered so that the software can differentiate watchdog initiated resets from other
resets, and can perform any required recovery once it restarts. If the source of the 32kHz system clock is the 32kHz
RC oscillator then the watchdog expiry periods are subject to the variation in period of the RC oscillator.
After power up, reset, start from deep sleep or start from sleep, the watchdog is always enabled with the largest
timeout period and will commence counting as if it had just been restarted. Under software control the watchdog can
be disabled. If it is enabled, the user must regularly restart the watchdog timer to stop it from expiring and causing a
reset. The watchdog runs continuously, even during doze, however the watchdog does not operate during sleep or
deep sleep, or when the hardware debugger has taken control of the CPU. It will recommence automatically if
enabled once the debugger un-stalls the CPU.
© Jennic 2009 JN-DS-JN5148-001 1v2 23
Preliminary
Page 24
Jennic
7 Interrupt System
The interrupt system on the JN5148 is a hardware-vectored interrupt system. The JN5148 provides several interrupt
sources, some associated with CPU operations (CPU exceptions) and others which are used by hardware in the
device. When an interrupt occurs, the CPU stops executing the current program and loads its program counter with a
fixed hardware address specific to that interrupt. The interrupt handler or interrupt service routine is stored at this
location and is run on the next CPU cycle. Execution of interrupt service routines is always performed in supervisor
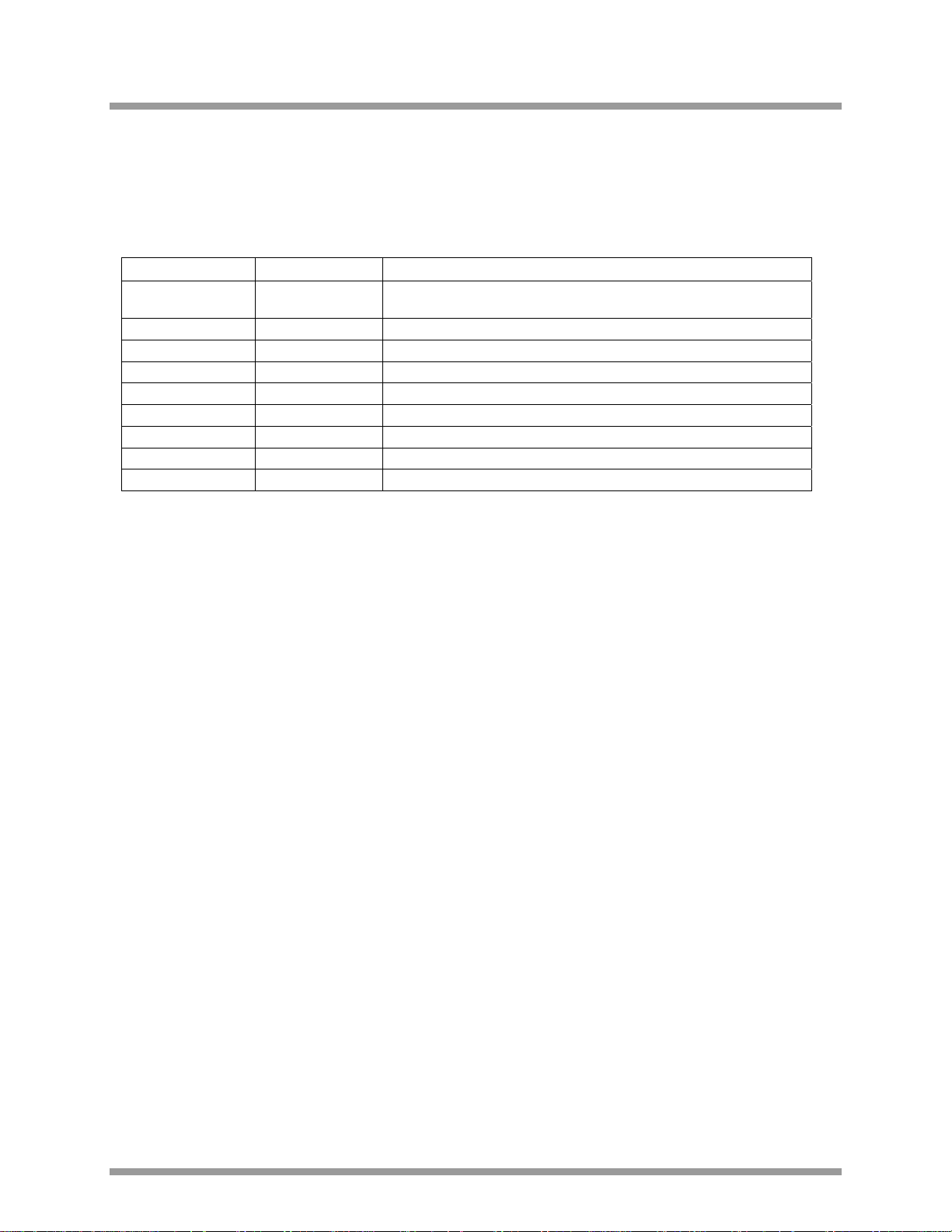
mode. Interrupt sources and their vector locations are listed in
Interrupt Source Vector Location Interrupt Definition
Bus error 0x08 Typically cause by an attempt to access an invalid address or a
disabled peripheral
Tick timer 0x0e Tick timer interrupt asserted
Alignment error 0x14 Load/store address to non-naturally-aligned location
Illegal instruction 0x1a Attempt to execute an unrecognised instruction
Hardware interrupt 0x20 interrupt asserted
System call 0x26
Trap 0x2c caused by the b.trap instruction or the debug unit
Reset 0x38 Caused by software or hardware reset.
Stack Overflow 0x3e Stack overflow
System call initiated by b.sys instruction
Table 2: Interrupt Vectors
Table 2 below:
7.1 System Calls
The b.trap and b.sys instructions allow processor exceptions to be generated by software.
A system call exception will be generated when the b.sys instruction is executed. This exception can, for example, be
used to enable a task to switch the processor into supervisor mode when a real time operating system is in use. (See
section 3 for further details.)
The b.trap instruction is commonly used for trapping errors and for debugging.
7.2 Processor Exceptions
7.2.1 Bus Error
A bus error exception is generated when software attempts to access a memory address that does not exist, or is not
populated with memory or peripheral registers or when writing to ROM.
7.2.2 Alignment
Alignment exceptions are generated when software attempts to access objects that are not aligned to natural word
boundaries. 16-bit objects must be stored on even byte boundaries, while 32-bit objects must be stored on quad byte
boundaries. For instance, attempting to read a 16-bit object from address 0xFFF1 will trigger an alignment exception
as will a read of a 32-bit object from 0xFFF1, 0xFFF2 or 0xFFF3. Examples of legal 32-bit object addresses are
0xFFF0, 0xFFF4, 0xFFF8 etc.
7.2.3 Illegal Instruction
If the CPU reads an unrecognised instruction from memory as part of its instruction fetch, it will cause an illegal
instruction exception.
7.2.4 Stack Overflow
When enabled, a stack overflow exception occurs if the stack pointer reaches a programmable location.
24 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 25

Jennic
7.3 Hardware Interrupts
Hardware interrupts generated from the transceiver, analogue or digital peripherals and DIO pins are individually
masked using the Programmable Interrupt Controller (PIC). Management of interrupts is provided in the peripherals
[6]. For details of the interrupts generated from each peripheral see the respective section in this datasheet.
library
Interrupts can be used to wake the JN5148 from sleep. The peripherals, baseband controller, security coprocessor
and PIC are powered down during sleep but the DIO interrupts and optionally the pulse counters, wake-up timers and
analogue comparator interrupts remain powered to bring the JN5148 out of sleep.
Prioritised external interrupt handling (i.e., interrupts from hardware peripherals) is provided to enable an application
to control an events priority to provide for deterministic program execution.
The priority Interrupt controller provides 15 levels of prioritised interrupts. The priority level of all interrupts can be set,
with value 0 being used to indicate that the source can never produce an external interrupt, 1 for the lowest priority
source(s) and 15 for the highest priority source(s). Note that multiple interrupt sources can be assigned the same
priority level if desired.
If while processing an interrupt, a new event occurs at the same or lower priority level, a new external interrupt will
not be triggered. However, if a new higher priority event occurs, the external interrupt will again be asserted,
interrupting the current interrupt service routine.
Once the interrupt service routine is complete, lower priority events can be serviced.
© Jennic 2009 JN-DS-JN5148-001 1v2 25
Preliminary
Page 26
Jennic
8 Wireless Transceiver
The wireless transceiver comprises a 2.45GHz radio, modem, a baseband processor, a security coprocessor and
PHY controller. These blocks, with protocol software provided as a library, implement an IEEE802.15.4 standardsbased wireless transceiver that transmits and receives data over the air in the unlicensed 2.4GHz band.
8.1 Radio
Figure 14 shows the single ended radio architecture.
Radio
LNA
Lim1
Lim2
Lim3
Lim4
D-Type
Switch
Calibration
Reference
& Bias
ADC
PA
sigma
synth
Figure 14: Radio Architecture
The radio comprises a low-IF receive path and a direct modulation transmit path, which converge at the TX/RX
switch. The switch connects to the external single ended matching network, which consists of two inductors and a
capacitor, this arrangement creates a 50Ω port and removes the need for a balun. A 50Ω single ended antenna can
be connected directly to this port.
The 32MHz crystal oscillator feeds a divider, which provides the frequency synthesiser with a reference frequency.
The synthesiser contains programmable feedback dividers, phase detector, charge pump and internal Voltage
Controlled Oscillator (VCO). The VCO has no external components, and includes calibration circuitry to compensate
for differences in internal component values due to process and temperature variations. The VCO is controlled by a
Phase Locked Loop (PLL) that has an internal loop filter. A programmable charge pump is also used to tune the loop
characteristic.
The receiver chain starts with the low noise amplifier / mixer combination whose outputs are passed to a lowpass
filter, which provides the channel definition. The signal is then passed to a series of amplifier blocks forming a limiting
strip. The signal is converted to a digital signal before being passed to the Modem. The gain control for the RX path
is derived in the automatic gain control (AGC) block within the Modem, which samples the signal level at various
points down the RX chain. To improve the performance and reduce current consumption, automatic calibration is
applied to various blocks in the RX path.
In the transmit direction, the digital stream from the Modem is passed to a digital sigma-delta modulator which
controls the feedback dividers in the synthesiser, (dual point modulation). The VCO frequency now tracks the applied
modulation. The 2.4 GHz signal from the VCO is then passed to the RF Power Amplifier (PA), whose power control
can be selected from one of three settings. The output of the PA drives the antenna via the RX/TX switch
delta
26 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 27
Jennic
8.1.1 Radio External Components
In order to realise the full performance of the radio it is essential that the reference PCB layout and BOM are carefully
followed. See Appendix
The radio is powered from a number of internal 1.8V regulators fed from the analogue supply VDD1, in order to
provide good noise isolation between the digital logic of the JN5148 and the analogue blocks. These regulators are
also controlled by the baseband controller and protocol software to minimise power consumption. Decoupling for
internal regulators is required as described in section
For single ended antennas or connectors, a balun is not required, however a matching network is needed.
The RF matching network requires three external components and the IBIAS pin requires one external component as
shown in schematic in B.4.1. These components are critical and should be placed close to the JN5148 pins and
analogue ground as defined in
Constraints
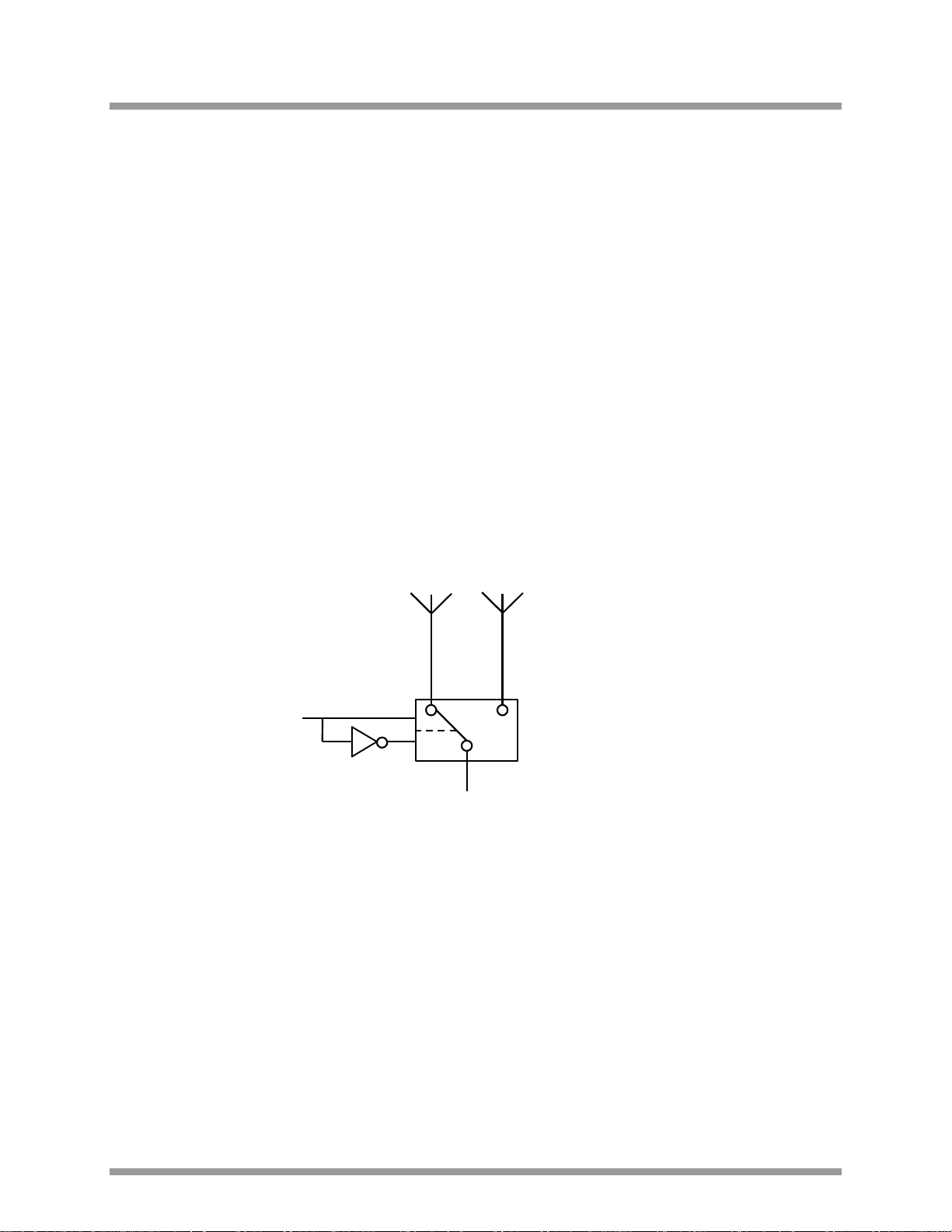
8.1.2 . Antenna Diversity
Support is provided for antenna diversity. Antenna diversity is a technique that maximises the performance of an
antenna system. It allows the radio to switch between two antennas that have very low correlation between their
received signals. Typically, this is achieved by spacing two antennas around 0.25 wavelengths apart or by using two
orthogonal polarisations. So, if a packet is transmitted and no acknowledgement is received, the radio system can
switch to the other antenna for the retry, with a different probability of success.
The JN5148 provides an output (ADO) on DIO12 that is asserted on odd numbered retries that can be used to control
an antenna switch; this enables antenna diversity to be implemented easily (see
B.4.
2.2.1, Power Supplies
Table 8: JN5148 Printed Antenna Reference Module Components and PCB Layout
Figure 15 and Figure 16).
ADO (DIO[12])
Antenna A
SEL
SELB
Antenna B
AB
RF Switch: Single-Pole, Double-Throw (SPDT)
COM
Device RF Port
Figure 15 Simple Antenna Diversity Implementation using External RF Switch
© Jennic 2009 JN-DS-JN5148-001 1v2 27
Preliminary
Page 28
Jennic
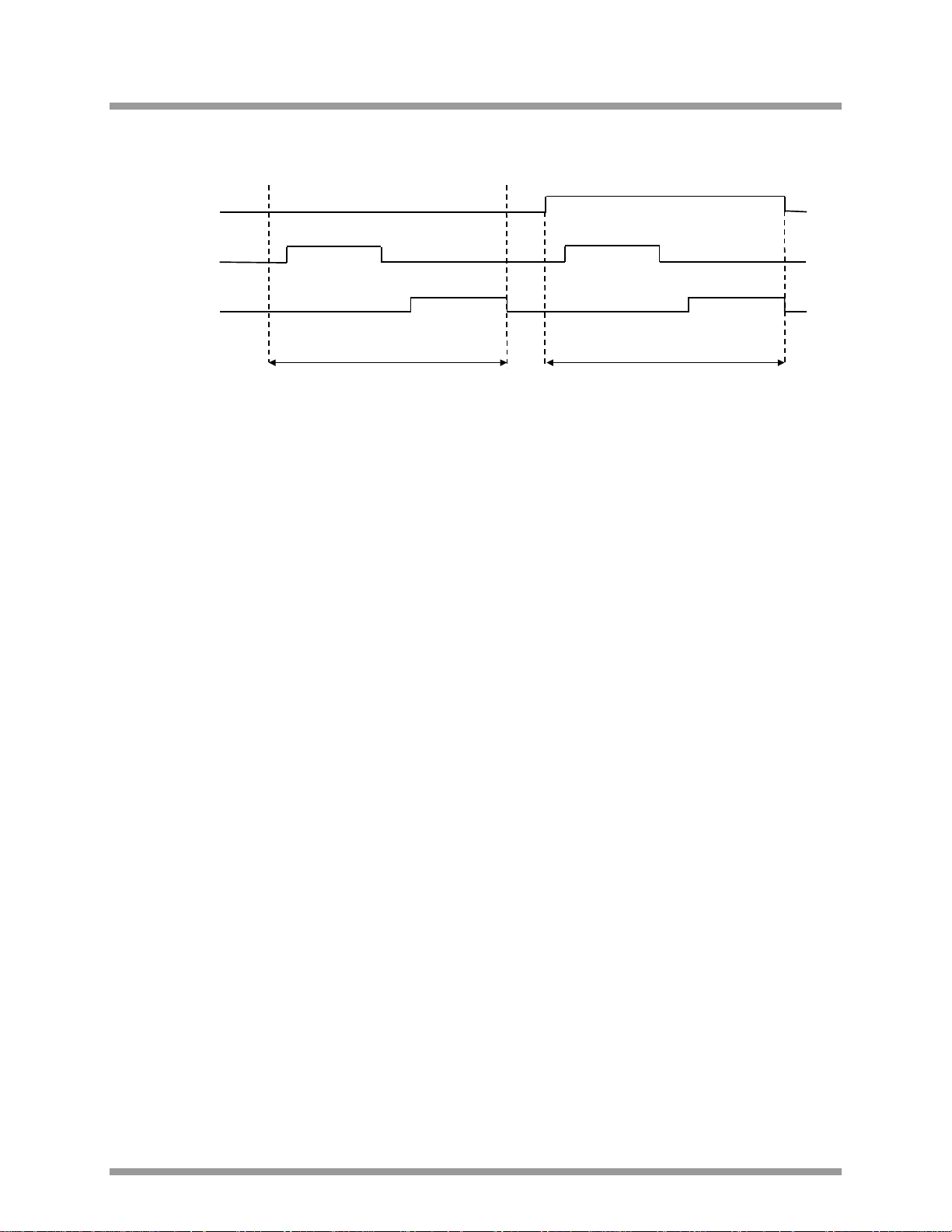
ADO (DIO[12])
TX Active
RX Active
1stTX-RX Cycle 2ndTX-RX Cycle (1stRetry)
Figure 16 Antenna Diversity ADO Signal for TX with Acknowledgement
DIO13 can be configured to be ADE, the inverse of ADO. In this configuration, an antenna diversity scheme can be
implemented without the need for the inverter shown in
Figure 15.
28 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 29
Jennic
8.2 Modem
The modem performs all the necessary modulation and spreading functions required for digital transmission and
reception of data at 250kbps in the 2450MHz radio frequency band in compliance with the IEEE802.15.4 standard. It
also provides a high data rate modes at 500 and 667kbps.
Features provided to support network channel selection algorithms include Energy Detection (ED), Link Quality
Indication (LQI) and fully programmable Clear Channel Assessment (CCA).
The Modem provides a digital Receive Signal Strength Indication (RSSI) that facilitates the implementation of the
IEEE 802.15.4 ED function.
The LQI is defined in the IEEE 802.15.4 standard as a characterisation of the strength and/or data quality of a
received packet. The Modem produces a signal quality metric based upon correlation magnitudes, which may be
used in conjunction with the ED value to formulate the LQI.
The CCA capability of the Modem supports all modes of operation defined in the IEEE 802.15.4 standard, namely
Energy above ED threshold, Carrier Sense and Carrier Sense and/or energy above ED threshold.
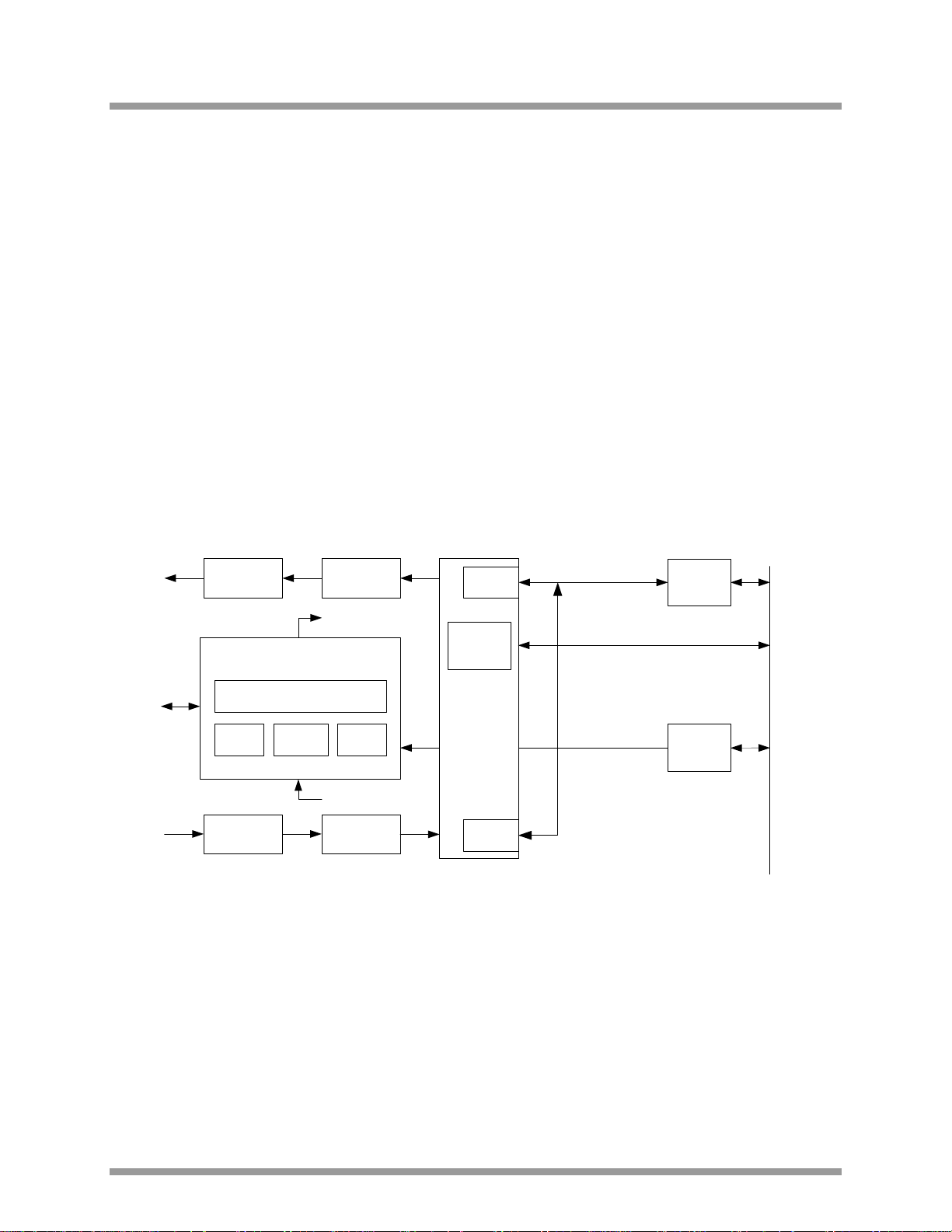
8.3 Baseband Processor
The baseband processor provides all time-critical functions of the IEEE802.15.4 MAC layer. Dedicated hardware
guarantees air interface timing is precise. The MAC layer hardware/software partitioning, enables software to
implement the sequencing of events required by the protocol and to schedule timed events with millisecond
resolution, and the hardware to implement specific events with microsecond timing resolution. The protocol software
layer performs the higher-layer aspects of the protocol, sending management and data messages between endpoint
and coordinator nodes, using the services provided by the baseband processor.
Tx
Bitstream
Append
Checksum
Supervisor
Serialiser
Status
Encrypt
Port
AES
AES
Codec
Codec
Tx/Rx
Frame
Buffer
Radio
Rx
Bitstream
Protocol Timing Engine
CSMA CCA
Verify
Checksum
Backoff
Control
Control
Deserialiser
Inline
Security
Decrypt
Port
Protocol
Timers
Processor
Bus
Figure 17: Baseband Processor
8.3.1 Transmit
A transmission is performed by software writing the data to be transferred into the Tx/Rx Frame Buffer, together with
parameters such as the destination address and the number of retries allowed, and programming one of the protocol
timers to indicate the time at which the frame is to be sent. This time will be determined by the software tracking the
higher-layer aspects of the protocol such as superframe timing and slot boundaries. Once the packet is prepared and
protocol timer set, the supervisor block controls the transmission. When the scheduled time arrives, the supervisor
controls the sequencing of the radio and modem to perform the type of transmission required. It can perform all the
algorithms required by IEEE802.15.4 such as CSMA/CA, GTS without processor intervention including retries and
random backoffs.
© Jennic 2009 JN-DS-JN5148-001 1v2 29
Preliminary
Page 30

Jennic
When the transmission begins, the header of the frame is constructed from the parameters programmed by the
software and sent with the frame data through the serialiser to the Modem. At the same time, the radio is prepared
for transmission. During the passage of the bitstream to the modem, it passes through a CRC checksum generator
that calculates the checksum on-the-fly, and appends it to the end of the frame.
If using slotted access, it is possible for a transmission to overrun the time in its allocated slot; the Baseband
Processor handles this situation autonomously and notifies the protocol software via interrupt, rather than requiring it
to handle the overrun explicitly.
8.3.2 Reception
During reception, the radio is set to receive on a particular channel. On receipt of data from the modem, the frame is
directed into the Tx/Rx Frame Buffer where both header and frame data can be read by the protocol software. An
interrupt may be provided on receipt of the frame header. As the frame data is being received from the modem it is
passed through a checksum generator; at the end of the reception the checksum result is compared with the
checksum at the end of the message to ensure that the data has been received correctly. An interrupt may be
provided to indicate successful packet reception.
During reception, the modem determines the Link Quality, which is made available at the end of the reception as part
of the requirements of IEEE802.15.4.
8.3.3 Auto Acknowledge
Part of the protocol allows for transmitted frames to be acknowledged by the destination sending an acknowledge
packet within a very short window after the transmitted frame has been received. The JN5148 baseband processor
can automatically construct and send the acknowledgement packet without processor intervention and hence avoid
the protocol software being involved in time-critical processing within the acknowledge sequence. The JN5148
baseband processor can also request an acknowledge for packets being transmitted and handle the reception of
acknowledged packets without processor intervention.
8.3.4 Beacon Generation
In beaconing networks, the baseband processor can automatically generate and send beacon frames; the repetition
rate of the beacons is programmed by the CPU, and the baseband then constructs the beacon contents from data
delivered by the CPU. The baseband processor schedules the beacons and transmits them without CPU
intervention.
8.3.5 Security
The baseband processor supports the transmission and reception of secured frames using the Advanced Encryption
Standard (AES) algorithm transparently to the CPU. This is done by passing incoming and outgoing data through an
in-line security engine that is able to perform encryption and decryption operations on-the-fly, resulting in minimal
processor intervention. The CPU must provide the appropriate encrypt/decrypt keys for the transmission or
reception. On transmission, the key can be programmed at the same time as the rest of the frame data and setup
information.
During reception, the CPU must look up the key and provide it from information held in the header of the incoming
frame. However, the hardware of the security engine can process data much faster than the incoming frame data
rate. This means that it is possible to allow the CPU to receive the interrupt from the header of an incoming packet,
read where the frame originated, look up the key and program it to the security hardware before the end of the frame
has arrived. By providing a small amount of buffering to store incoming data while the lookup process is taking place,
the security engine can catch up processing the frame so that when the frame arrives in the receive frame buffer it is
fully decrypted.
8.4 Security Coprocessor
As well as being used during in-line encryption/decryption operations over a streaming interface and in external
memory encryption, it is also possible to use the AES core as a coprocessor to the CPU of the JN5148. To allow the
hardware to be shared between the two interfaces an arbiter ensures that the streaming interface to the AES core
always has priority, to ensure that in-line processing can take place at any time.
30 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 31

Jennic
Some protocols (for example ZigBee) require that security operations can be performed on buffered data rather than
in-line. A hardware implementation of the encryption engine significantly speeds up the processing of the contents of
these buffers. The AES library for the JN5148 provides operations that utilise the encryption engine in the device and
allow the contents of memory buffers to be transformed. Information such as the type of security operation to be
performed and the encrypt/decrypt key to be used must also be provided.
Processor
Interface
Arbiter
In-line
Interface
Figure 18: Security Coprocessor Architecture
8.5 Location Awareness
The JN5148 provides the ability for an application to obtain the Time Of Flight (TOF) between two network nodes.
The TOF information is an alternative metric to that of the existing Energy Detect value (RSSI) that has been typically
used for calculating the relative inter-nodal separation, for subsequent use in a location awareness system.
For short ranges RSSI will typically give a better accuracy than TOF, however for distances above 5 to 10 meters
TOF will offer significant improvements in accuracy compared to RSSI. In general, the RSSI error scales with
distance, such that if the distance doubles then the error doubles.
AES
Block
Encrpytion
Controller
AES
Encoder
Key Generation
8.6 Higher Data Rates
To support the demands of applications that require high data throughputs such as in audio or data streaming
applications, the JN5148 supports higher data rate modes that offer 500kbps or 667kbps on air transmission rates.
The switching between standard and higher data rates is controlled via software, When operating in a higher data
rate mode standard IEEE802.15.4 features, such as clear channel assessment, can still be used. This allows the
JN5148 in a higher data rate mode to co-exist in an IEEE802.15.4 based network (adhering to the correct bit rates
and frame timing etc.) whilst at the same time providing the benefit of the higher data rate where required.
When operating in a higher data rate mode, the sensitivity of the radio will be reduced.
© Jennic 2009 JN-DS-JN5148-001 1v2 31
Preliminary
Page 32

Jennic
9 Digital Input/Output
There are 21 Digital I/O (DIO) pins, which can be configured as either an input or an output, and each has a
selectable internal pull-up resistor. Most DIO pins are multiplexed with alternate peripheral features of the device,
see section 2.1. Once a peripheral is enabled it takes precedence over the device pins. Refer to the individual
module sections for a full description of the alternate peripherals functions. Following a reset (and whilst the reset
input is held low), all peripherals are off and the DIO pins are configured as inputs with the internals pull-ups turned
on.
When a peripheral is not enabled, the DIO pins associated with it can be used as digital inputs or outputs. Each pin
can be controlled individually by setting the direction and then reading or writing to the pin.
The individual pull-up resistors, R
cycles. The pull-ups are generally configured once after reset depending on the external components and
functionality. For instance, outputs should generally have the pull-ups disabled. An input that is always driven should
also have the pull-up disabled.
When configured as an input each pin can be used to generate an interrupt upon a change of state (selectable
transition either from low to high or high to low); the interrupt can be enabled or disabled. When the device is
sleeping, these interrupts become events that can be used to wake the device up. Equally the status of the interrupt
may be read. See section
The state of all DIO pins can be read, irrespective of whether the DIO is configured as an input or an output.
Throughout a sleep cycle the direction of the DIO, and the state of the outputs, is held. This is based on the resultant
of the GPIO Data/ Direction registers and the effect of any enabled peripherals at the point of entering sleep.
Following a wake-up these directions and output values are maintained under control of the GPIO data / direction
registers. Any peripherals enabled before the sleep cycle are not automatically re-enabled, this must be done through
software after the wake-up.
For example, if DIO0 is configured to be SPISEL1 then it becomes an output. The output value is controlled by the
SPI functional block. If the device then enters a sleep cycle, the DIO will remain an output and hold the value being
output when entering sleep. After wake-up the DIO will still be an output with the same value but controlled from the
GPIO Data/Direction registers. It can be altered with the software functions that adjust the DIO, or the application may
re-configure it to be SPISEL1.
Unused DIO pins are recommended to be set as inputs with the pull-up enabled.
21 Power Management and Sleep Modes for further details on sleep and wakeup.
, can also be enabled or disabled as needed and the setting is held through sleep
PU
32 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 33

Jennic
10 Serial Peripheral Interface
The Serial Peripheral Interface (SPI) allows high-speed synchronous data transfer between the JN5148 and
peripheral devices. The JN5148 operates as a master on the SPI bus and all other devices connected to the SPI are
expected to be slave devices under the control of the JN5148 CPU. The SPI includes the following features:
• Full-duplex, three-wire synchronous data transfer
• Programmable bit rates (up to 16Mbit/s)
• Programmable transaction size up to 32-bits
• Standard SPI modes 0,1,2 and 3
• Manual or Automatic slave select generation (up to 5 slaves)
• Maskable transaction complete interrupt
• LSB First or MSB First Data Transfer
• Supports delayed read edges
SPICLK
16 MHz
Clock
Divider
SPI Bus
Cycle
Controller
Data Buffer
SPIMISO
SPIMOSI
DIV
Clock Edge
Select
Data
CHAR_LEN
LSB
Select
Latch
SPISEL [4..0]
Figure 19: SPI Block Diagram
The SPI bus employs a simple shift register data transfer scheme. Data is clocked out of and into the active devices
in a first-in, first-out fashion allowing SPI devices to transmit and receive data simultaneously.
There are three dedicated pins SPICLK, SPIMOSI, SPIMISO that are shared across all devices on the bus. MasterOut-Slave-In or Master-In-Slave-Out data transfer is relative to the clock signal SPICLK generated by the JN5148.
The JN5148 provides five slave selects, SPISEL0 to SPISEL4 to allow five SPI peripherals on the bus. SPISEL0 is a
dedicated pin; this is generally connected to a serial Flash/ EEPROM memory holding application code that is
downloaded to internal RAM via software from reset. SPISEL1 to 4, are alternate functions of pins DIO0 to 3
respectively.
The interface can transfer from 1 to 32-bits without software intervention and can keep the slave select lines asserted
between transfers when required, to enable longer transfers to be performed.
© Jennic 2009 JN-DS-JN5148-001 1v2 33
Preliminary
Page 34

Jennic
Slave 0
Flash/
EEPROM
Me mo ry
SI
C
SS
SO
Slave 1
Us er
Defined
SI
SPISEL0
SS
SO
C
SPISEL 1
41
37
38
JN5148
SPISEL2
SPISEL3
42
Slave 2
Us er
Defined
SI
C
SPISEL 4
43
36
33
34
SS
SO
SPIMOSI
SPICLK
SPIMISO
Slave 3
Us er
Defined
C
SI
Slave 4
SS
Us er
SS
Defined
SO
SI
SO
C
Figure 20: Typical JN5148 SPI Peripheral Connection
The data transfer rate on the SPI bus is determined by the SPICLK signal. The JN5148 supports transfers at
selectable data rates from 16MHz to 125kHz selected by a clock divider. Both SPICLK clock phase and polarity are
configurable. The clock phase determines which edge of SPICLK is used by the JN5148 to present new data on the
SPIMOSI line; the opposite edge will be used to read data from the SPIMISO line. The interface should be configured
appropriately for the SPI slave being accessed.
SPICLK
Polarity
(CPOL)
0
0
1
1
If more than one SPISEL line is to be used in a system they must be used in numerical order starting from SPISEL0.
For instance if 3 SPI select lines are to be used, they must be SPISEL0, 1 and 2. A SPISEL line can be automatically
deasserted between transactions if required, or it may stay asserted over a number of transactions. For devices such
as memories where a large amount of data can be received by the master by continually providing SPICLK
transitions, the ability for the select line to stay asserted is an advantage since it keeps the slave enabled over the
whole of the transfer.
A transaction commences with the SPI bus being set to the correct configuration, and then the slave device is
selected. Upon commencement of transmission (1 to 32 bits) data is placed in the FIFO data buffer and clocked out,
at the same time generating the corresponding SPICLK transitions. Since the transfer is full-duplex, the same
number of data bits is being received from the slave as it transmits. The data that is received during this transmission
can be read (1 to 32 bits). If the master simply needs to provide a number of SPICLK transitions to allow data to be
Phase
(CPHA)
Mode Description
0 0 SPICLK is low when idle – the first edge is positive.
Valid data is output on SPIMOSI before the first clock and changes every
negative edge. SPIMISO is sampled every positive edge.
1 1 SPICLK is low when idle – the first edge is positive.
Valid data is output on SPIMOSI every positive edge. SPIMISO is sampled every
negative edge.
0 2 SPICLK is high when idle – the first edge is negative.
Valid data is output on SPIMOSI before the first clock edge and is changed
every positive edge. SPIMISO is sampled every negative edge.
1 3 SPICLK is high when idle – the first edge is negative.
Valid data is output on SPIMOSI every negative edge. SPIMISO is sampled
every positive edge.
Table 3 SPI Configurations
34 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 35

Jennic
sent from a slave, it should perform transmit using dummy data. An interrupt can be generated when the transaction
has completed or alternatively the interface can be polled.
If a slave device wishes to signal the JN5148 indicating that it has data to provide, it may be connected to one of the
DIO pins that can be enabled as an interrupt.
Figure 21 shows a complex SPI transfer, reading data from a FLASH device, that can be achieved using the SPI
master interface. The slave select line must stay low for many separate SPI accesses, and therefore manual slave
select mode must be used. The required slave select can then be asserted (active low) at the start of the transfer. A
sequence 8 and 32 bit transfers can be used to issue the command and address to the FLASH device and then to
read data back. Finally, the slave select can be deselected to end the transaction.
Instruction Transaction
SPISEL
SPICLK
SPIMOSI
SPIMISO
0
1234567
Instruction (0x03)
Read Data Bytes Transaction(s) 1-N
8 9 10 28 29 30 31
24-bit Address
23 22 21 3 2 1 0
MSB
SPISEL
0
SPICLK
SPIMOSI
SPIMISO
1234
7 6 5 4 3 2 1 0
MSB
Byte 1 Byte 2 Byte N
57
6
value unused by peripherals
8910
7 6 5
MSB
3 2 1 0
8N-1
LSB
Figure 21: Example SPI Waveforms – Reading from FLASH device using Mode 0
© Jennic 2009 JN-DS-JN5148-001 1v2 35
Preliminary
Page 36

Jennic
11 Timers
11.1 Peripheral Timer/Counters
Three general-purpose timer/counter units are available that can be independently configured to operate in one of
five possible modes. Timer 0 and 1 support all 5 modes of operation and Timer 2 supports PWM and Delta-Sigma
modes only. The timers have the following:
• 5-bit prescaler, divides system clock by 2
• Clocked from internal system clock (16MHz)
• 16-bit counter, 16-bit Rise and Fall (period) registers
• Timer: can generate interrupts off Rise and Fall counts. Can be gated by external signal
• Counter: counts number of transitions on external event signal. Can use low-high, high-low or both
transitions
• PWM/Single pulse: outputs repeating Pulse Width Modulation signal or a single pulse. Can set period and
mark-space ratio
• Capture: measures times between transitions of an applied signal
• Delta-Sigma: Return-To-Zero (RTZ) and Non-Return-to-Zero (NRZ) modes
• Timer usage of external IO can be controlled on a pin by pin basis
prescale value
as the clock to the timer (prescaler range is 0 to 16)
TIMxCAP
SYSCLK
TIMxCK_GT
Capture
Generator
Capture
Enable
Prescaler
Rise
Fall
Delta-Sigma
Gate
PWM/Δ−Σ
Counter
Gate
PWM/Δ−Σ
Reset Generator
Reset
INT
Int Enable
Interrupt
Generator
=
=
S
R
PWM/Delta-
Sigma
OE
TIMxOUT
S/w
System
Edge
Select
Reset
Reset
Single
Shot
Figure 22: Timer Unit Block Diagram
36 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 37

Jennic
The clock source for the timer unit is fed from the 16MHz system clock. This clock passes to a 5-bit prescaler where a
value of 0 leaves the clock unmodified and other values divide it by 2
2 applied to the 16MHz system clock source results in a timer clock of 4MHz.
The counter is optionally gated by a signal on the clock/gate input (TIMxCK_GT). If the gate function is selected,
then the counter is frozen when the clock/gate input is high.
An interrupt can be generated whenever the counter is equal to the value in either of the High or Low registers.
The internal Output Enable (OE) signal enables or disables the timer output.
The Timer 0 signals CK_GT, CAP and OUT are alternate functions of pins DIO8, 9 and 10 respectively and Timer 1
signals CK_GT, CAP and OUT are alternate functions of pins DIO11, 12, and 13 respectively. Timer 2 OUT is an
alternate function of DIO11 If operating in timer mode it is not necessary to use any of the DIO pins, allowing the
standard DIO functionality to be available to the application.
Note, timer 0 may only be used as an internal timer or in counter mode (counting events) if an external 32kHz crystal
is used. If timer 2 is used in PWM or Delta-Sigma mode then timer 1 does not have access to its clock/gate pin.
Therefore, it can not operate in counter mode (counting events) or use the gate function.
prescale
value. For example, a prescale value of
11.1.1 Pulse Width Modulation Mode
Pulse Width Modulation (PWM) mode allows the user to specify an overall cycle time and pulse length within the
cycle. The pulse can be generated either as a single shot or as a train of pulses with a repetition rate determined by
the cycle time.
In this mode, the cycle time and low periods of the PWM output signal can be set by the values of two independent
16-bit registers (Fall and Rise). The counter increments and its output is compared to the 16-bit Rise and Fall
registers. When the counter is equal to the Rise register, the PWM output is set to high; when the counter reaches
the Fall value, the output returns to low. In continuous mode, when the counter reaches the Fall value, it will reset
and the cycle repeats. The PWM waveform is available on TIMxOUT when the output driver is enabled.
Rise
Fall
Figure 23: PWM Output Timings
11.1.2 Capture Mode
The capture mode can be used to measure the time between transitions of a signal applied to the capture input
(TIMxCAP). When the capture is started, on the next low-to-high transition of the captured signal, the count value is
stored in the Rise register, and on the following high-to-low transition, the counter value is stored in the Fall register.
The pulse width is the difference in counts in the two registers multiplied by the period of the prescaled clock. Upon
reading the capture registers the counter is stopped. The values in the High and Low registers will be updated
whenever there is a corresponding transition on the capture input, and the value stored will be relative to when the
mode was started. Therefore, if multiple pulses are seen on TIMxCAP before the counter is stopped only the last
pulse width will be stored.
© Jennic 2009 JN-DS-JN5148-001 1v2 37
Preliminary
Page 38

Jennic
CLK
CAPT
Rise
Fall
9
t
RISE
t
F
A
L
L
Capture Mode Enabled
x
x 14
54
9
t
3
RISE
t
FALL
3
7
Figure 24: Capture Mode
11.1.3 Counter/Timer Mode
The counter/timer can be used to generate interrupts, based on the timers or event counting, for software to use. As
a timer the clock source is from the system clock, prescaled if required. The timer period is programmed into the Fall
register and the Fall register match interrupt enabled. The timer is started as either a single-shot or a repeating timer,
and generates an interrupt when the counter reaches the Fall register value.
When used to count external events on TIMxCK_GT the clock source is selected from the input pin and the number
of events programmed into the Fall register. The Fall register match interrupt is enabled and the counter started,
usually in single shot mode. An interrupt is generated when the programmed number of transitions is seen on the
input pin. The transitions counted can configured to be rising, falling or both rising and falling edges.
Edges on the event signal must be at least 100nsec apart, i.e. pulses must be wider than 100nsec.
11.1.4 Delta-Sigma Mode
A separate delta-sigma mode is available, allowing a low speed delta-sigma DAC to be implemented with up to 16-bit
resolution. This requires that a resistor-capacitor network is placed between the output DIO pin and digital ground. A
stream of pulses with digital voltage levels is generated which is integrated by the RC network to give an analogue
voltage. A conversion time is defined in terms of a number of clock cycles. The width of the pulses generated is the
period of a clock cycle. The number of pulses output in the cycle, together with the integrator RC values, will
determine the resulting analogue voltage. For example, generating approximately half the number of pulses that
make up a complete conversion period will produce a voltage on the RC output of VDD1/2, provided the RC time
constant is chosen correctly. During a conversion, the pulses will be pseudo-randomly dispersed throughout the
cycle in order to produce a steady voltage on the output of the RC network.
The output signal is asserted for the number of clock periods defined in the High register, with the total period being
16
2
cycles. For the same value in the High register, the pattern of pulses on subsequent cycles is different, due to the
pseudo-random distribution.
The delta-sigma convertor output can operate in a Return-To-Zero (RTZ) or a Non-Return-to-Zero (NRZ) mode. The
NRZ mode will allow several pulses to be output next to each other. The RTZ mode ensures that each pulse is
separated from the next by at least one period. This improves linearity if the rise and fall times of the output are
different to one another. Essentially, the output signal is low on every other output clock period, and the conversion
cycle time is twice the NRZ cycle time ie 2
since even at full scale only half the cycle contains pulses.
RTZ and NRZ for the same programmed number of pulses.
17
clocks. The integrated output will only reach half VDD2 in RTZ mode,
Figure 25 and Figure 26 illustrate the difference between
38 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 39

Jennic
1 2 3 1 2 N
Conversion cycle 1
N
17
2
Conversion cycle 2
3
Figure 25: Return To Zero Mode in Operation
1 2 3 1 2 N
Conversion cycle 1
N 3
16
Conversion cycle 2
2
Figure 26: Non-Return to Zero Mode
11.1.5 Example Timer / Counter Application
Figure 27 shows an application of the JN5148 timers to provide closed loop speed control. Timer 0 is configured in
PWM mode to provide a variable mark-space ratio switching waveform to the gate of the NFET. This in turn controls
the power in the DC motor.
Timer 1 is configured to count the rising edge events on the clk/gate pin over a constant period. This converts the
tacho pulse stream output into a count proportional to the motor speed. This value is then used by the application
software executing the control algorithm.
If required for other functionality, then the unused IO associated with the timers could be used as general purpose
DIO.
+12V
JN5148
Timer 0
Timer 1
48
50
51
52
53
54
CLK/GATE
CAPTURE
PWM
CLK/GATE
CAPTURE
PWM
1N4007
M
IRF521
1 pulse/rev
Tacho
Figure 27: Closed Loop PWM Speed Control Using JN5148 Timers
11.2 Tick Timer
The JN5148 contains a hardware timer that can be used for generating timing interrupts to software. It may be used
to implement regular events such as ticks for software timers or an operating system, as a high-precision timing
reference or can be used to implement system monitor timeouts as used in a watchdog timer. Features include:
• 32-bit counter
© Jennic 2009 JN-DS-JN5148-001 1v2 39
Preliminary
Page 40

Jennic
• 28-bit match value
• Maskable timer interrupt
• Single-shot, Restartable or Continuous modes of operation
Match Value
SysClk
&
Run
Counter
Reset
Mode
Control
Mode
Match
=
Int
Enable
Tick Timer
Interrupt
&
Figure 28: Tick Timer
The Tick Timer is clocked from a continuous 16MHz clock, which is fed to a 32-bit wide resettable up-counter, gated
by a signal from the mode control block. A match register allows comparison between the counter and a
programmed value. The match value, measured in 16MHz clock cycles is programmed through software, in the
range 0 to 0x0FFFFFFF. The output of the comparison can be used to generate an interrupt if the interrupt is
enabled and used in controlling the counter in the different modes. Upon configuring the timer mode, the counter is
also reset.
If the mode is programmed as single shot, the counter begins to count from zero until the match value is reached.
The match signal will be generated which will cause an interrupt if enabled, and the counter will stop counting. The
counter is restarted by reprogramming the mode.
If the mode is programmed as restartable, the operation of the counter is the same as for the single shot mode,
except that when the match value is reached the counter is reset and begins counting from zero. An interrupt will be
generated when the match value is reached if it is enabled.
Continuous mode operation is similar to restartable, except that when the match value is reached, the counter is not
reset but continues to count. An interrupt will be generated when the match value is reached if enabled.
11.3 Wakeup Timers
Two 32-bit wakeup timers are available in the JN5148 driven from the 32kHz internal clock. They may run during
sleep periods when the majority of the rest of the device is powered down, to time sleep periods or other long period
timings that may be required by the application. The wakeup timers do not run during deep sleep and may optionally
be disabled in sleep mode through software control. When a wakeup timer expires it typically generates an interrupt,
if the device is asleep then the interrupt may be used as an event to end the sleep period. See Section
details on how they are used during sleep periods. Features include:
• 35-bit down-counter
• Optionally runs during sleep periods
• Clocked by 32kHz system clock; either 32kHz RC oscillator, 32kHz XTAL oscillator or 32kHz clock input
40 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
21 for further
Page 41

Jennic
A wakeup timer consists of a 35-bit down counter clocked from the selected 32 kHz clock. An interrupt or wakeup
event can be generated when the counter reaches zero. On reaching zero the counter will continue to count down
until stopped, which allows the latency in responding to the interrupt to be measured. If an interrupt or wakeup event
is required, the timer interrupt should be enabled before loading the count value for the period. Once the count value
is loaded and counter started, the counter begins to count down; the counter can be stopped at any time through
software control. The counter will remain at the value it contained when the timer was stopped and no interrupt will
be generated. The status of the timers can be read to indicate if the timers are running and/or have expired; this is
useful when the timer interrupts are masked. This operation will reset any expired status flags.
11.3.1 RC Oscillator Calibration
The RC oscillator that can be used to time sleep periods is designed to require very little power to operate and be
self-contained, requiring no external timing components and hence is lower cost. As a consequence of using on-chip
resistors and capacitors, the inherent absolute accuracy and temperature coefficient is lower than that of a crystal
oscillator, but once calibrated the accuracy approaches that of a crystal oscillator. Sleep time periods should be as
close to the desired time as possible in order to allow the device to wake up in time for important events, for example
beacon transmissions in the IEEE802.15.4 protocol. If the sleep time is accurate, the device can be programmed to
wake up very close to the calculated time of the event and so keep current consumption to a minimum. If the sleep
time is less accurate, it will be necessary to wake up earlier in order to be certain the event will be captured. If the
device wakes earlier, it will be awake for longer and so reduce battery life.
In order to allow sleep time periods to be as close to the desired length as possible, the true frequency of the RC
oscillator needs to be determined to better than the initial 30% accuracy. The calibration factor can then be used to
calculate the true number of nominal 32kHz periods needed to make up a particular sleep time. A calibration
reference counter, clocked from the 16MHz system clock, is provided to allow comparisons to be made between the
32kHz RC clock and the 16MHz system clock when the JN5148 is awake.
Wakeup timer0 counts for a set number of 32kHz clock periods during which time the reference counter runs. When
the wakeup timer reaches zero the reference counter is stopped, allowing software to read the number of 16MHz
clock ticks generated during the time represented by the number of 32kHz ticks programmed in the wakeup timer.
The true period of the 32kHz clock can thus be determined and used when programming a wakeup timer to achieve a
better accuracy and hence more accurate sleep periods
For a RC oscillator running at exactly 32,000Hz the value returned by the calibration procedure should be 10000, for
a calibration period of twenty 32,000Hz clock periods. If the oscillator is running faster than 32,000Hz the count will
be less than 10000, if running slower the value will be higher. For a calibration count of 9000, indicating that the RC
oscillator period is running at approximately 35kHz, to time for a period of 2 seconds the timer should be loaded with
71,111 ((10000/9000) x (32000 x 2)) rather than 64000.
© Jennic 2009 JN-DS-JN5148-001 1v2 41
Preliminary
Page 42

Jennic
12 Pulse Counters
Two 16-bit counters are provided that can increment during all modes of operation (including sleep), based on pulses
received on 2 dedicated DIO inputs; DIO1 and DIO8. The pulses can be de-bounced using the 32kHz clock to guard
against false counting on slow or noisy edges. Increments occur from a configurable rising or falling edge on the
respective DIO input.
Each counter has an associated 16-bit reference that is loaded by the user. An interrupt (and wakeup event if
asleep) may be generated when a counter reaches its pre-configured reference value. The two counters may
optionally be cascaded together to provide a single 32-bit counter, linked to DIO1. The counters do not saturate at
65535, but naturally roll-over to 0. Additionally, the pulse counting continues when the reference value is reached
without software interaction so that pulses are not missed even if there is a long delay before an interrupt is serviced
or during the wakeup process.
The system can work with signals up to 100kHz, with no debounce, or from 5.3kHz to 1.7kHz with debounce. When
using debounce the 32kHz clock must be active, so for minimum sleep currents the debounce mode should not be
used.
42 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 43

Jennic
13 Serial Communications
The JN5148 has two independent Universal Asynchronous Receiver/Transmitter (UART) serial communication
interfaces. These provide similar operating features to the industry standard 16550A device operating in FIFO mode.
Each interface performs serial-to-parallel conversion on incoming serial data and parallel-to-serial conversion on
outgoing data from the CPU to external devices. In both directions, a 16-byte deep FIFO buffer allows the CPU to
read and write multiple characters on each transaction. This means that the CPU is freed from handling data on a
character-by-character basis, with the associated high processor overhead. The UARTs have the following features:
• Emulates behaviour of industry standard NS16450 and NS16550A UARTs
• 16 byte transmit and receive FIFO buffers reduce interrupts to CPU, with direct access to fill levels of each
• Adds / deletes standard start, stop and parity communication bits to or from the serial data
• Independently controlled transmit, receive, status and data sent interrupts
• Optional modem flow control signals CTS and RTS
• Fully programmable data formats: baud rate, start, stop and parity settings
• False start bit detection, parity, framing and FIFO overrun error detect and break indication
• Internal diagnostic capabilities: loop-back controls for communications link fault isolation
• Flow control by software or automatically by hardware
Internal
Interrupt
RTS
CTS
Interrupt
Logic
Modem
Signals
Logic
Interrupt
ID
Register
Interrupt
Enable
Register
Modem
Status
Register
Modem
Control
Register
Divisor
Latch
Registers
Line
Status
Register
Line
Control
Register
FIFO
Control
Register
Receiver FIFO
Transmitter FIFO
Processor Bus
Baud Generator
Logic
Receiver
Logic
Receiver Shift
Register
Transmitter
Logic
Transmitter Shift
Register
RXD
TXD
Figure 29: UART Block Diagram
The serial interface contains programmable fields that can be used to set number of data bits (5, 6,7 or 8), even, odd,
set-at-1, set-at-0 or no-parity detection and generation of single or multiple stop bit, (for 5 bit data, multiple is 1.5 stop
bits; for 6, 7 or 8 data bits, multiple is 2 bits).
The baud rate is programmable up to 1Mbps, standard baud rates such as 4800, 9600, 19.2k, 38.4k etc. can be
configured.
For applications requiring hardware flow control, two control signals are provided: Clear-To-Send (CTS) and RequestTo-Send (RTS). CTS is an indication sent by an external device to the UART that it is ready to receive data. RTS is
an indication sent by the UART to the external device that it is ready to receive data. RTS is controlled from software,
while the value of CTS can be read. Monitoring and control of CTS and RTS is a software activity, normally
performed as part of interrupt processing. The signals do not control parts of the UART hardware, but simply indicate
to software the state of the UART external interface. Alternatively, the Automatic Flow Control mode can be set
© Jennic 2009 JN-DS-JN5148-001 1v2 43
Preliminary
Page 44

Jennic
where the hardware controls the value of the generated RTS (negated if the receive FIFO fill level is greater than a
programmable threshold of 8, 11, 13 or 15 bytes), and only transmits data when the incoming CTS is asserted.
Software can read characters, one byte at a time, from the Receive FIFO and can also write to the Transmit FIFO,
one byte at a time. The Transmit and Receive FIFOs can be cleared and reset independently of each other. The
status of the transmitter can be checked to see if it is empty, and if there is a character being transmitted. The status
of the receiver can also be checked, indicating if conditions such as parity error, framing error or break indication
have occurred. It also shows if an overrun error occurred (receive buffer full and another character arrives) and if
there is data held in the receive FIFO.
UART 0 signals CTS, RTS, TXD and RXD are alternate functions of pins DIO4, 5, 6 and 7 respectively and UART 1
signals CTS, RTS, TXD and RXD are alternate functions of pins DIO17, 18, 19 and 16 respectively. RXD for UART1
can also be configured to be an alternate function of DIO20 instead of DIO16. If CTS and RTS are not required on
the devices external pins, then they may be disabled, this allows the DIOx function to be used for other purposes.
Note: With the automatic flow control threshold set to 15, the hardware flow control within the UART block negates
RTS when the receive FIFO is about to become full. In some instances it has been observed that remote devices that
are transmitting data do not respond quickly enough to the de-asserted CTS and continue to transmit data. In these
instances the data will be lost in a receive FIFO overflow.
13.1 Interrupts
Interrupt generation can be controlled for the UART block, and is divided into four categories:
• Received Data Available: Is set when data in the Rx FIFO queue reaches a particular level (the trigger level can
be configured as 1, 4, 8 or 14) or if no character has been received for 4 character times.
• Transmit FIFO Empty: set when the last character from the Tx FIFO is read and starts to be transmitted.
• Receiver Line Status: set when one of the following occur (1) Parity Error - the character at the head of the
receive FIFO has been received with a parity error, (2) Overrun Error - the Rx FIFO is full and another character
has been received at the Receiver shift register, (3) Framing Error - the character at the head of the receive
FIFO does not have a valid stop bit and (4) Break Interrupt – occurs when the RxD line has been held low for an
entire character.
• Modem Status: Generated when the CTS (Clear To Send) input control line changes.
13.2 UART Application
The following example shows the UART connected to a 9-pin connector compatible with a PC. As the JN5148
device pins do not provide the RS232 line voltage, a level shifter is used.
PC COM Port
JN5148
TX D
46
44
47
45
CTS
RXD UART0
RTS
RS232
Lev el
Shif t er
Figure 30: JN5148 Serial Communication Link
1 5
6 9
Pin Signal
1
CD
2
RD
3
TD
4
DTR
5
SG
6
DSR
7
RTS
8
CTS
9
RI
44 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 45

Jennic
14 JTAG Debug Interface
The JN5148 includes an IEEE1149.1 compliant JTAG port for the sole purpose of software code debug with Jennic's
Software Development Kit. The JTAG interface is disabled by default and is enabled under software control.
Therefore, debugging is only possible if enabled by the application. Once enabled, the application executes as
normal until the external debugger controller initiates debug activity.
The Debugger supports breakpoints and watchpoints based on four comparisons between any of program counter,
load/store effective address and load/store data. There is the ability to chain the comparisons together. There is also
the ability, under debugger control to perform the following commands: go, stop, reset, step over/into/out/next, run to
cursor and breakpoints. In addition, under control of the debugger, it is possible to:
• Read and write registers on the wishbone bus
• Read ROM and RAM, and write to RAM
• Read and write CPU internal registers
The Debugger interface is accessed, depending upon the configuration, through the pins used for UART0 or UART1.
This is enabled under software control and is dealt with in
following table details which DIO are used for the JTAG interface depending upon the configuration.
clock (TCK) 4 17
control (TMS) 5 18
data out (TDO) 6 19
data in (TDI) 7 16 or 20
Table 4 Hardware Debugger IO
If doze mode is active when debugging is started, the processor will be woken and then respond to debugger
commands. It is not possible to wake the device from sleep using the debug interface and debugging is not available
while the device is sleeping.
When using the debug interface, program execution is halted, and control of the CPU is handed to the debugger. The
watchdog, tick timer and the three timers described in section
CPU.
When control is handed from the CPU to the debugger or back a small number of CPU clock cycles are taken
flushing or reloading the CPU pipeline. Because of this, when a program is halted by the debugger and then restarted
again, a small number of tick timer cycles will elapse.
It is possible to prevent all hardware debugging by blowing the relevant Efuse bit.
The JTAG interface does not support boundary scan testing. It is recommended that the JN5148 is not connected as
part of the board scan chain.
JN-AN-1118 JN5148 Application Debugging [5]. The
DIO Assignment Signal
UART0 pins UART1 pins
11 are stalled while the debugger is in control of the
© Jennic 2009 JN-DS-JN5148-001 1v2 45
Preliminary
Page 46

Jennic
15 Two-Wire Serial Interface
The JN5148 includes industry standard two-wire synchronous Serial Interface operates as a Master (MSIF) or Slave
(SSIF) that provides a simple and efficient method of data exchange between devices. The system uses a serial data
line (SIF_D) and a serial clock line (SIF_CLK) to perform bi-directional data transfers and includes the following
features:
Common to both master and slave:
2
• Compatible with both I
• Support for 7 and 10-bit addressing modes
• Optional pulse suppression on signal inputs
Master only:
• Multi-master operation
• Software programmable clock frequency
• Clock stretching and wait state generation
• Software programmable acknowledge bit
• Interrupt or bit-polling driven byte-by-byte data-transfers
• Bus busy detection
Slave only:
• Programmable slave address
• Simple byte level transfer protocol
• Write data flow control with optional clock stretching or acknowledge mechanism
• Read data preloaded or provided as required
C and SMbus peripherals
15.1 Connecting Devices
The clock and data lines, SIF_D and SIF_CLK, are alternate functions of DIO15 and DIO14 respectively. The serial
interface function of these pins is selected when the interface is enabled. They are both bi-directional lines,
connected internally to the positive supply voltage via weak (45kΩ) programmable pull-up resistors. However, it is
recommended that external 4.7kΩ pull-ups be used for reliable operation at high bus speeds, as shown in
When the bus is free, both lines are HIGH. The output stages of devices connected to the bus must have an opendrain or open-collector in order to perform the wired-AND function. The number of devices connected to the bus is
solely dependent on the bus capacitance limit of 400pF.
JN5148
VDD
Pu llup
Resistors
D2_I N CLK2_IN
D2_O UT
CLK2_OUT
SIF
DIO14
DIO15
SIF_CLK
SIF_D
D1_I N CLK1_IN
CLK1_OUT
D1_O UT
DEVICE 1 DEVICE 2
Figure 31: Connection Details
R
R
P
P
Figure 31.
46 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 47

Jennic
15.2 Clock Stretching
Slave devices can use clock stretching to slow down the transfer bit rate. After the master has driven SIF_CLK low,
the slave can drive SIF_CLK low for the required period and then release it. If the slave’s SIF_CLK low period is
greater than the master’s low period the resulting SIF_CLK bus signal low period is stretched thus inserting wait
states.
Clock held low
by Slave
SIF_CLK
Master SIF_CLK
SIF_CLK
SIF_CLK
Slave SIF_CLK
Wired-AND SIF_CLK
Figure 32: Clock Stretching
15.3 Master Two-wire Serial Interface
When operating as a master device, it provides the clock signal and a prescale register determines the clock rate,
allowing operation up to 400kbit/s.
Data transfer is controlled from the processor bus interface at a byte level, with the processor responsible for
indicating when start, stop, read, write and acknowledge control should be generated. Write data written into a
transmit buffer will be written out across the two-wire interface when indicated, and read data received on the
interface is made available in a receive buffer. Indication of when a particular transfer has completed may be
indicated by means of an interrupt or by polling a status bit.
The first byte of data transferred by the device after a start bit is the slave address. The JN5148 supports both 7-bit
and 10-bit slave addresses by generating either one or two address transfers. Only the slave with a matching address
will respond by returning an acknowledge bit.
The master interface provides a true multi-master bus including collision detection and arbitration that prevents data
corruption. If two or more masters simultaneously try to control the bus, a clock synchronization procedure
determines the bus clock. Because of the wired-AND connection of the interface, a high-to-low transition on the bus
affects all connected devices. This means a high-to-low transition on the SIF_CLK line causes all concerned devices
to count off their low period. Once the clock input of a device has gone low, it will hold the SIF_CLK line in that state
until the clock high state is reached when it releases the SIF_CLK line. Due to the wired-AND connection, the
SIF_CLK line will therefore be held low by the device with the longest low period, and held high by the device with the
shortest high period.
SIF_CLK1
SIF_CLK2
SIF_CLK
Start counting
low period
Wait
State
Start counting
high period
Master1 SIF_CLK
Master2 SIF_CLK
Wired-AND SIF_CLK
Figure 33: Multi-Master Clock Synchronisation
After each transfer has completed, the status of the device must be checked to ensure that the data has been
acknowledged correctly, and that there has been no loss of arbitration. (N.B. Loss of arbitration may occur at any
point during the transfer, including data cycles). An interrupt will be generated when arbitration has been lost.
© Jennic 2009 JN-DS-JN5148-001 1v2 47
Preliminary
Page 48

Jennic
15.4 Slave Two-wire Serial Interface
When operating as a slave device, the interface does not provide a clock signal, although it may drive the clock signal
low if it is required to apply clock stretching.
Only transfers whose address matches the value programmed into the interface’s address register are accepted. The
interface allows both 7 and 10 bit addresses to be programmed, but only responds with an acknowledge to a single
address. Addresses defined as “reserved” will not be responded to, and should not be programmed into the address
register. A list of reserved addresses is shown in
Address Name Behaviour
0000 000 General Call/Start Byte Ignored
0000 001 CBUS address Ignored
0000 010 Reserved Ignored
0000 011 Reserved Ignored
0000 1XX Hs-mode master code Ignored
1111 1XX Reserved Ignored
1111 0XX 10-bit address Only responded to if 10 bit address
Table 5 : List of two-wire serial interface reserved addresses
Data transfer is controlled from the processor bus interface at a byte level, with the processor responsible for taking
write data from a receive buffer and providing read data to a transmit buffer when indicated. A series of interrupt
status bits are provided to control the flow of data.
For writes, in to the slave interface, it is important that data is taken from the receive buffer by the processor before
the next byte of data arrives. To enable this, the interface may be configured to work in two possible backoff modes:
• Not Acknowledge mode – where the interface returns a Not Acknowledge (NACK) to the master if more data
is received before the previous data has been taken. This will lead to the termination of the current data
transfer.
• Clock Stretching mode – where the interface holds the clock line low until the previous data has been taken.
This will occur after transfer of the next data but before issuing an acknowledge
For reads, from the slave interface, the data may be preloaded into the transmit buffer when it is empty (i.e. at the
start of day, or when the last data has been read), or fetched each time a read transfer is requested. When using data
preload, read data in the buffer must be replenished following a data write, as the transmit and received data is
contained in a shared buffer. The interface will hold the bus using clock stretching when the transmit buffer is empty.
Interrupts may be triggered when:
• Data Buffer read data is required – a byte of data to be read should be provided to avoid the interface from
clock stretching
• Data Buffer read data has been taken – this indicates when the next data may be preloaded into the data
buffer
• Data Buffer write data is available – a byte of data should be taken from the data buffer to avoid data backoff
as defined above
• The last data in a transfer has completed – i.e. the end of a burst of data, when a Stop or Restart is seen
• A protocol error has been spotted on the interface
Table 5.
set in address register
48 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 49

Jennic
16 Four-Wire Digital Audio Interface
The JN5148 includes a four-wire digital audio interface that can be used for interfacing to audio CODECs. The
following features are supported:
• Compatible with the industry standard I²S interface
• Option to support I²S, left justified and right justified modes
• Optional support for connection to mono sample FIFO with data transferred on the left or right channel
• Master only
• Transmit on falling edge and receive on rising edge
• Up to 8MHz maximum clock range
• Maximum system size of 32-bits, allowing up to 16-bits per channel (left or right channels)
• Option for pad bit insertion, allowing length of transfer per channel to be anything from 16 to 32 bits
• Data Transfer size range of 1 to 16-bits per channel
• Option to invert WS (normally 0 for left, but allow 1 for left instead)
• Continuous clock output option to support CODECs which use it as a clock source
• Separate input and output data lines
• Option to invert idle state of WS (to indicate left or right)
The Word Select (WS), Data In (SDIN), Clock (SCK) and Data Out (SDOUT) lines are alternate functions of DIO
lines 12,13,17 and 18 respectively.
Data transfer is always bidirectional. Data placed in the Data Buffer before a transfer command is issued will be
transmitted on SDOUT whilst the data received on SDIN will be placed in the Data Buffer at the end of the transfer.
Indication that a transfer has completed is by means of an interrupt or by polling a status bit.
Left channel data is always sent first, with MSB first on each channel. The interface will always transfer both left and
right channel data. For mono data transfer, the user should pad out the unused channel with 0’s, and ignore any data
returned on the unused channel.
The length of a data transfer is derived as follows:
• When padding is disabled – Data Transfer Length = 2 x Data Transfer Size
• When padding is enabled – Data Transfer Length = 2 x (16 + Extra Pad Length)
Timing of the 3 main modes is shown in
stored and how it will be transferred onto the interface. SD Max Size indicates how the maximum transfer size (16
with no additional padding) will transfer, whilst SD 3-bits indicates how 3 bits of data will be aligned when padding is
enabled. Received data in the Data Buffer will always be padded out with 0’s if the Data Transfer Size is less than 16bits, and any bits received beyond 16-bits when extra padding is used, will be discarded. In the examples, the polarity
of WS is shown with Left channel = 0, and the idle state is Right Channel.
Figure 34, Figure 35 and Figure 36. The Data Buffer shows how the data is
© Jennic 2009 JN-DS-JN5148-001 1v2 49
Preliminary
Page 50

Jennic
Data Buffer
SCK
WS
SD Max Size
SD 3-bits
Data Buffer
SCK
WS
Right R2 R1 R0 L2 L1 L0Left
Left Right
MSB LSB MSB LSB
MSB-1 MSB-2 MSB-1 MSB-2
L2 L1 L0 0 R2 R1 R0
000
Figure 34: I²S Mode
Right R2 R1 R0 L2 L1 L0Left
Left Right
SD Max Size
SD 3-bits
Data Buffer
SCK
WS
SD Max Size
SD 3-bits
MSB LSB MSB LSB
MSB-1 MSB-2 MSB-1 MSB-2
L2 L1 L0 0 R2 R1 R0
000
Figure 35: Left Justified Mode
Right R2 R1 R0 L2 L1 L0Left
Left Right
MSB LSB MSB LSB
MSB-1 MSB-1
0
0
L2
L1
L0
0
0
R2
R1
R0
Figure 36: Right Justified Mode
50 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 51

Jennic
17 Random Number Generator
A random number generator is provided which creates a 16-bit random number each time it is invoked. Consecutive
calls can be made to build up any length of random number required. Each call takes approximately 0.25msec to
complete. Alternatively, continuous generation mode can be used where a new number is generated approximately
every 0.25msec. In either mode of operation an interrupt can be generated to indicate when the number is available,
or a status bit can be polled.
The random bits are generated by sampling the state of the 32MHz clock every 32kHz system clock edge. As these
clocks are asynchronous to each other, each sampled bit is unpredictable and hence random.
© Jennic 2009 JN-DS-JN5148-001 1v2 51
Preliminary
Page 52

Jennic
18 Sample FIFO
A 10 deep FIFO is provided to buffer data between the CPU and either the four-wire digital audio interface or the
DAC/ ADC. It supports single channel input and output data, up to 16 bits wide. When used it can reduce the rate at
which the processor has to generate/process data, and this may allow more efficient operation. Interrupts can be
generated based on fill levels and also FIFO empty and full conditions. Normal configuration of the digital audio
interface or the DAC/ ADC is still required when accessing the data via the FIFO.
When used with the DAC / ADC functions a timing signal is generated by the DAC/ ADC functions to control the
transfer of data to and from the FIFO and the analogue peripherals. The transfers will occur at the sample rate
configured within the DAC / ADC functions.
When the FIFO is linked to the four-wire digital audio interface, timer 2 must be used to generate an internal timing
signal to control the flow of data across the interface. The timer does not require any external pins to be enabled. The
timer should be set up to produce a PWM output with a rising edge generated every time a digital audio transfer is
required. The transfer rate is typically configured to be the audio sample rate, e.g. 8kHz. If the transfer rate is too fast
or slow data will be transferred correctly between the FIFO and the digital audio block.
52 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 53

Jennic
19 Intelligent Peripheral Interface
The Intelligent Peripheral (IP) Interface is provided for systems that are more complex, where there is a processor
that requires a wireless peripheral. As an example, the JN5148 may provide a complete ZigBee wireless network
interface to a phone, computer, PDA, set-top box or games console. No resources are required from the main
processor compared to a transceiver as the complete wireless protocol may be run on the internal JN5148 CPU. The
wireless peripheral may be controlled via one of the UARTs but the IP interface is intended to provide a high-speed,
low-processor-overhead interface.
The intelligent peripheral interface is a SPI slave interface and uses pins shared with other DIO signals. The
interface is designed to allow message passing and data transfer. Data received and transmitted on the IP interface
is copied directly to and from a dedicated area of memory without intervention from the CPU. This memory area, the
intelligent peripheral memory block, contains 64 32-bit word receive and transmit buffers.
JN5148
IP_INT SPIINT
IP_ DO SPIMISO
Intel ligent
Peripheral
Inter f ac e
The interface functions as a SPI slave. It is possible to select the clock edge of IP_CLK on which data on the IP_DIN
line of the interface is sampled, and the state of data output IP_DOUT is changed. The order of transmission is MSB
first. The IP_DO data output is tri-stated when the device is inactive, i.e. the device is not selected via IP_SEL. An
interrupt output line IP_INT is available so that the JN5148 can indicate to an external master that it has data to
transfer. The interface can be clocked at up to 8MHz
The IP interface signals IP_CLK, IP_DO, IP_DI, IP_SEL, IP_INT are alternate functions of pins DIO14 to 18
respectively.
IP_ DI SPIMOSI
SPISEL IP_SEL
IP_CLK SPICLK
Figure 37: Intelligent Peripheral Connection
System Processor
(e.g. in cellphone, computer)
SPI
MASTER
CPU
19.1 Data Transfer Format
Transfers are started by the remote processor asserting the IP_SEL line and terminated by the remote processor deasserting IP_SEL.
Data transfers are bi-directional and traffic in both directions has a format of status byte, data length byte (of the
number of 32-bit words to transfer) and data packet (from the receive and transmit buffers), as shown in
The first byte transferred into the JN5148 is a status byte with the format shown in
padding byte that should be set to zero. The first byte output by the JN5148 is a padding byte, that should be ignored,
followed by a status byte with the format shown in
Bit Field Description
7:2 RSVD Reserved, set to 0
1 TXQ 1: Data queued for transmission
0 RXRDY 1: Buffer ready to receive data
Table 6: IP Status Byte Format
© Jennic 2009 JN-DS-JN5148-001 1v2 53
Table 6
Preliminary
Table 6. This is followed by a
Figure 38
Page 54

Jennic
If data is queued for transmission and the recipient has indicated that they are ready for it (RXRDY in incoming status
byte was 1), the next byte to be transmitted is the data length in words (N). If either the JN5148 or the remote
processor has no data to transfer, then the data length should be set to zero. The transaction can be terminated by
the master after the status and padding bytes have been sent if it is not possible to send data in either direction. This
may be because neither party has data to send or because the receiver does not have a buffer available. If the data
length is non-zero, the data in the JN5148 transmit memory buffer is sent, beginning at the start of the buffer. At the
same time that data bytes are being sent from the transmit buffer, the JN5148 receive buffer is being filled with
incoming data, beginning from the start of the buffer.
The remote processor, acting as the master, must determine the larger of its incoming or outgoing data transfers and
deassert IP_SEL when all of the transmit and receive data has been transferred. The data is transferred into or out of
the buffers starting from the lowest address in the buffer, and each word is assembled with the MSB first on the serial
data lines. Following a transaction, IP_SEL must be high (deasserted) for at least 400nsec before a further
transaction can begin.
IP_SEL
IP_CLK
IP_DI
IP_DO
Status (8-bit)
padding (8-bit)
padding (8-bit)
Status (8-bit)
data length or 0s (8-bit)
data length or 0s (8-bit)
Figure 38: Intelligent Peripheral Data Transfer Waveforms
The N words of data transferred on the interface are also formatted. The first three bytes, of the first word, must be
zero. These are followed by a one byte length field that must be one less than the data length shown in the data
length field in Figure 38, i.e. N-1. Following this are the (N-1) words of data.
The application running on the JN5148 has high level software functions for sending and receiving data on this
interface. The function of generating and interpreting the individual bytes on the interface is handled by hardware
within the device. The remote processor must generate, and interpret, the signals in the interface. For instance, this
may be done with a configurable SPI master interface.
N words of data
N words of data
19.2 JN5148 (Slave) Initiated Data Transfer
To send data, the data is written into either buffer 0 or 1 of the intelligent peripheral memory area. Then the buffer
number is written together with the data length. If the call is successful, the interrupt line IP_INT will signal to the
remote processor that there is a message ready to be sent from the JN5148. When a remote processor starts a
transfer to the JN5148 by deasserting IP_SEL, then IP_INT is deasserted. If the transfer is unsuccessful and the
data is not output then IP_INT is reasserted after the transfer to indicate that data is still waiting to be sent.
The interface can be configured to generate an internal interrupt whenever a transaction completes (for example
IP_SEL becomes inactive after a transfer starts). It is also possible to mask the interrupt. The end of the
transmission can be signalled by an interrupt, or the interface can be polled.
To receive data the interface must be firstly initialised and when this is done, the bit RXRDY sent in the status byte
from the IP block will show that data can be received by the JN5148. Successful data arrival can be indicated by an
interrupt, or the interface can be polled. IP_INT is asserted if the JN5148 is configured to be able to receive, and the
remote processor has previously attempted to send data but the RXRDY indicated that it could not be sent.
To send and receive at the same time, the transmit and receive buffers must be set to be different.
19.3 Remote (Master) Processor Initiated Data Transfer
The remote processor (master) must initiate a transfer to send data to the JN5148 (slave) by asserting the slave
select pin, IP_SEL, and generating its status byte on IP_DI with TXRDY set. After receiving the status byte from the
JN5148, the master should check that the JN5148 has a buffer ready by reading the RXRDY bit of the received
status byte. If the RXRDY bit is 0 indicating that the JN5148 cannot accept data, it must terminate the transfer by
deasserting IP_SEL unless it is receiving data from the JN5148. If the RXRDY bit is 1, indicating that the JN5148 can
accept data, then the master should generate a further 8 clocks on IP_CLK in order to transfer its own message
length on IP_DI. The master must continue clocking the interface until sufficient clocks have been generated to send
54 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 55

Jennic
all the data specified in the length field to the JN5148. The master must then deassert IP_SEL to show the transfer
is complete.
The master may initiate a transfer to read data from the JN5148 by asserting the slave select pin, IP_SEL, and
generating its status byte on IP_DI with RXRDY set. After receiving the status byte from the JN5148, it should check
that the JN5148 has a buffer ready by reading the TXRDY bit of the received status byte. If the TXRDY bit is 0,
indicating that the JN5148 does not have data to send, it must terminate the transfer by deasserting IP_SEL unless it
is transmitting data to the JN5148. If the TXRDY bit is 1, indicating that the JN5148 can send data, then the master
must generate a further 8 clocks on IP_CLK in order to receive the message length on IP_DO. The master must
continue clocking the interface until sufficient clocks have been generated to receive all the data specified in the
length field from the JN5148. The master should then deassert IP_SEL to show the transfer is complete.
Data can be sent in both directions at once and the master must ensure both transfers have completed before
deasserting IP_SEL.
© Jennic 2009 JN-DS-JN5148-001 1v2 55
Preliminary
Page 56

Jennic
20 Analogue Peripherals
The JN5148 contains a number of analogue peripherals allowing the direct connection of a wide range of external
sensors, switches and actuators.
Chip
Boundary
VREF
ADC1
ADC2
ADC3
ADC4
COMP1P
COMP1M
COMP2P
COMP2M
Temp
Sensor
ADC
Comparator 1
Comparator 2
Vref
Supply Voltage
(VDD1)
Internal Reference
Vref select
DAC1
DAC2
DAC1
DAC2
Processor Bus
Figure 39: Analogue Peripherals
In order to provide good isolation from digital noise, the analogue peripherals are powered by a separate regulator,
supplied from the analogue supply VDD1 and referenced to analogue ground VSSA.
A common reference Vref for the ADC and DAC can be selected between an internal bandgap reference or an
external voltage reference supplied to the VREF pin. Gain settings for the ADC and DAC are independent of each
other.
The ADC and DAC are clocked from a common clock source derived from the 16MHz clock
56 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 57

Jennic
20.1 Analogue to Digital Converter
The 12-bit analogue to digital converter (ADC) uses a successive approximation design to perform high accuracy
conversions as typically required in wireless sensor network applications. It has six multiplexed single-ended input
channels: four available externally, one connected to an internal temperature sensor, and one connected to an
internal supply monitoring circuit.
20.1.1 Operation
The input range of the ADC can be set between 0V to either the reference voltage or twice the reference voltage.
The reference can be either taken from the internal voltage reference or from the external voltage applied to the
VREF pin. For example, an external reference of 1.2V supplied to VREF may be used to set the ADC range between
0V and 2.4V.
VREF Gain Setting Maximum Input Range Supply Voltage Range (VDD)
1.2V
1.6V
1.2V
1.6V
The input clock to the ADC is 16MHz and can be divided down to 2MHz, 1MHz, 500kHz and 250kHz. During an ADC
conversion the selected input channel is sampled for a fixed period and then held. This sampling period is defined as
a number of ADC clock periods and can be programmed to 2, 4, 6 or 8. The conversion rate is ((3 x Sample period)
+ 14) clock periods. For example for 500kHz conversion with sample period of 2 will be (3 x 2) + 14 = 20 clock
periods, 40usecs or 25kHz. . The ADC can be operated in either a single conversion mode or alternatively a new
conversion can be started as soon as the previous one has completed, to give continuous conversions.
If the source resistance of the input voltage is 1kΩ or less, then the default sampling time of 2 clocks should be used.
The input to the ADC can be modelled as a resistor of 5kΩ(typ) and 10kΩ (max) to represent the on-resistance of the
switches and the sampling capacitor 8pF. The sampling time required can then be calculated, by adding the sensor
source resistance to the switch resistance, multiplying by the capacitance giving a time constant. Assuming normal
exponential RC charging, the number of time constants required to give an acceptable error can be calculated, 7 time
constants gives an error of 0.1%, so for 12-bit accuracy 10 time constants should be the target. For a source with
zero resistance, 10 time constants is 800 nsecs, hence the smallest sampling window of 2 clock periods can be used.
0
0
1
1
Table 7 ADC/DAC Maximum Input Range
1.2V
1.6V
2.4V
3.2V
2.2V - 3.6V
2.2V - 3.6V
2.6V - 3.6V
3.4V - 3.6V
Sample
5 K
ADC
pin
Figure 40 ADC Input Equivalent Circuit
The ADC sampling period, input range and mode (single shot or continuous) are controlled through software.
When the ADC conversion is complete, an interrupt is generated. Alternatively the conversion status can be polled.
When operating in continuous mode, it is recommended that the interrupt is used to signal the end of a conversion,
since conversion times may range from 10 to 152 μsecs. Polling over this period would be wasteful of processor
bandwidth.
To facilitate averaging of the ADC values, which is a common practice in microcontrollers, a dedicated accumulator
has been added, the user can define the accumulation to occur over 2,4,8 or 16 samples. The end of conversion
© Jennic 2009 JN-DS-JN5148-001 1v2 57
Switch
ADC
front
end
8 pF
Preliminary
Page 58

Jennic
interrupt can be modified to occur at the end of the chosen accumulation period, alternatively polling can still be used.
Software can then be used to apply the appropriate rounding and shifting to generate the average value, as well as
setting up the accumulation function.
For detailed electrical specifications, see section
20.1.2 Supply Monitor
The internal supply monitor allows the voltage on the analogue supply pin VDD1 to be measured. This is achieved
with a potential divider that reduces the voltage by a factor of 0.666, allowing it to fall inside the input range of the
ADC when set with an input range twice the internal voltage reference. The resistor chain that performs the voltage
reduction is disabled until the measurement is made to avoid a continuous drain on the supply.
20.1.3 Temperature Sensor
The on chip temperature sensor can be used either to provide an absolute measure of the device temperature or to
detect changes in the ambient temperature. In common with most on chip temperature sensors, it is not trimmed and
so the absolute accuracy variation is large; the user may wish to calibrate the sensor prior to use. The sensor forces
a constant current through a forward biased diode to provide a voltage output proportional to the chip die temperature
which can then be measured using the ADC. The measured voltage has a linear relationship to temperature as
described in section
Because this sensor is on chip, any measurements taken must account for the thermal time constants. For example,
if the device just came out of sleep mode the user application should wait until the temperature has stabilised before
taking a measurement.
22.3.15.
22.3.8.
20.2 Digital to Analogue Converter
The Digital to Analogue Converter (DAC) provides two output channels and is capable of producing voltages of 0 to
Vref or 0 to 2Vref where Vref is selected between the internal reference and the VREF pin, with a resolution of 12-bits
and a minimum conversion time of 10μsecs (2MHz clock).
20.2.1 Operation
The output range of each DAC can be set independently to swing between 0V to either the reference voltage or twice
the reference voltage. The reference voltage is selected from the internal reference or the VREF pin. For example,
an external reference of 0.8V supplied to VREF may be used to set DAC1 maximum output of 0.8V and DAC2
maximum output of 1.6V.
The DAC output amplifier is capable of driving a capacitive load up to that specified in section
Programmable clock periods allow a trade-off between conversion speed and resolution. The full 12-bit resolution is
achieved with the 250kHz clock rate. See section
The conversion period of the DACs are given by the same formula as the ADC conversion time and so can vary
between 10 and 152uS. The DAC values may be updated at the same time as the ADC is active.
The clock divider ratio, interrupt enable and reference voltage select are all controlled through software, options
common to both the ADC and DAC. The DAC output range and initial value can be set and the subsequent updates
provided by updating only the DAC value. Polling is available to determine if a DAC channel is busy performing a
conversion. The DAC can be disabled which will power down the DAC cell.
Simultaneous conversions with DAC1 and DAC2 are possible. To use both DACs at the same time it is only
necessary to enable them and supply the digital values via the software. The DACs should not be used in single shot
mode, but continuous conversion mode only, in order to maintain a steady output voltage.
22.3.9 electrical characteristics, for more details.
22.3.9
58 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 59

Jennic
20.3 Comparators
The JN5148 contains two analogue comparators COMP1 and COMP2 that are designed to have true rail-to-rail
inputs and operate over the full voltage range of the analogue supply VDD1. The hysteresis level (common to both
comparators) can be set to a nominal value of 0mV, 10mV, 20mV or 40mV. In addition, the source of the negative
input signal for each comparator (COMP1M and COMP2M) can be set to the internal voltage reference, the output of
DAC1 or DAC2 (COMP1 or COMP2 respectively) or the appropriate external pin. The comparator outputs are routed
to internal registers and can be polled, or can be used to generate interrupts. The comparators can be disabled to
reduce power consumption.
The comparators have a low power mode where the response time of the comparator is slower than normal and is
specified in section
sleep mode to wake up the JN5148 from sleep where low current consumption is important. The wakeup action and
the configuration for which edge of the comparator output will be active are controlled through software. In sleep
mode the negative input signal source, must be configured to be driven from the external pins.
22.3.10. This mode may be used during non-sleep operation however it is particularly useful in
© Jennic 2009 JN-DS-JN5148-001 1v2 59
Preliminary
Page 60

Jennic
21 Power Management and Sleep Modes
21.1 Operating Modes
Three operating modes are provided in the JN5148 that enable the system power consumption to be controlled
carefully to maximise battery life.
Active Processing Mode
•
• Sleep Mode
Deep Sleep Mode
•
The variation in power consumption of the three modes is a result of having a series of power domains within the chip
that may be controllably powered on or off.
21.1.1 Power Domains
The JN5148 has the following power domains:
• VDD Supply Domain: supplies the wake-up timers and controller, DIO blocks, Comparators, 32kHz RC and
crystal oscillators. This domain is driven from the external supply (battery) and is always powered. The wake-up
timers and controller, and the 32kHz RC and crystal oscillators may be powered on or off in sleep mode through
software control.
• Digital Logic Domain: supplies the digital peripherals, CPU, ROM, Baseband controller, Modem and Encryption
processor. It is powered off during sleep mode.
• Analogue Domain: supplies the ADC, DACs and the temperature sensor. It is powered off during sleep mode
and may be powered on or off in active processing mode through software control.
• RAM Domain: supplies the RAM during sleep mode to retain the memory contents. It may be powered on or off
for sleep mode through software control.
• Radio Domain: supplies the radio interface. It is powered during transmit and receive and controlled by the
baseband processor. It is powered off during sleep mode.
The current consumption figures for the different modes of operation of the device is given in section
22.2.2.
21.2 Active Processing Mode
Active processing mode in the JN5148 is where all of the application processing takes place. By default, the CPU will
execute at the selected clock speed executing application firmware. All of the peripherals are available to the
application, as are options to actively enable or disable them to control power consumption; see specific peripheral
sections for details.
Whilst in Active processing mode there is the option to doze the CPU but keep the rest of the chip active; this is
particularly useful for radio transmit and receive operations, where the CPU operation is not required therefore saving
power.
21.2.1 CPU Doze
Whilst in doze mode, CPU operation is stopped but the chip remains powered and the digital peripherals continue to
run. Doze mode is entered through software and is terminated by any interrupt request. Once the interrupt service
routine has been executed, normal program execution resumes. Doze mode uses more power than sleep and deep
sleep modes but requires less time to restart and can therefore be used as a low power alternative to an idle loop.
Whilst in CPU doze the current associated with the CPU is not consumed, therefore the basic device current is
reduced as shown in the figures in section
22.2.2.1.
21.3 Sleep Mode
The JN5148 enters sleep mode through software control. In this mode most of the internal chip functions are
shutdown to save power, however the state of DIO pins are retained, including the output values and pull-up enables,
60 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 61

Jennic
and this therefore preserves any interface to the outside world. The DAC outputs are placed into a high impedance
state.
When entering into sleep mode, there is an option to retain the RAM contents throughout the sleep period. If the
wakeup timers are not to be used for a wakeup event and the application does not require them to run continually,
then power can be saved by switching off the 32kHz oscillator if selected as the system clock through software
control. The oscillator will be restarted when a wakeup event occurs.
Whilst in sleep mode one of four possible events can cause a wakeup to occur: transitions on DIO inputs, expiry of
wakeup timers, pulse counters maturing or comparator events. If any of these events occur, and the relevant
interrupt is enabled, then an interrupt is generated that will cause a wakeup from sleep. It is possible for multiple
wakeup sources to trigger an event at the same instant and only one of them will be accountable for the wakeup
period. It is therefore necessary in software to remove all other pending wakeup events prior to requesting entry back
into sleep mode; otherwise, the device will re-awaken immediately.
When wakeup occurs, a similar sequence of events to the reset process described in section
the checking of the supply voltage by the Brown Out Detector
the power to CPU system is enabled and the reset is removed. Software determines that this is a reset from sleep
and so commences with the wakeup process. If RAM contents were held through sleep, wakeup is quicker as the
application program does not have to be reloaded from Flash memory. See section
6.4. The 32MHz oscillator is started up, once stable
22.3.6 for wake-up timings.
21.3.1 Wakeup Timer Event
The JN5148 contains two 35-bit wakeup timers that are counters clocked from the 32kHz oscillator, and can be
programmed to generate a wake-up event. Following a wakeup event, the timers continue to run. These timers are
described in section 11.3.
Timer events can be generated from both of the two timers; one is intended for use by the 802.15.4 protocol, the
other being available for use by the Application running on the CPU. These timers are available to run at any time,
even during sleep mode.
6.1 happens, including
21.3.2 DIO Event
Any DIO pin when used as an input has the capability, by detecting a transition, to generate a wake-up event. Once
this feature has been enabled the type of transition can be specified (rising or falling edge). Even when groups of
DIO lines are configured as alternative functions such as the UARTs or Timers etc, any input line in the group can still
be used to provide a wakeup event. This means that an external device communicating over the UART can wakeup
a sleeping device by asserting its RTS signal pin (which is the CTS input of the JN5148).
21.3.3 Comparator Event
The comparator can generate a wakeup interrupt when a change in the relative levels of the positive and negative
inputs occurs. The ability to wakeup when continuously monitoring analogue signals is useful in ultra-low power
applications. For example, the JN5148 can remain in sleep mode until the voltage drops below a threshold and then
be woken up to deal with the alarm condition.
21.3.4 Pulse Counter
The JN5148 contains two 16 bit pulse counters that can be programmed to generate a wake-up event. Following the
wakeup event the counters will continue to operate and therefore no pulse will be missed during the wake-up
process. These counters are described in section
To minimise sleep current it is possible to disable the 32K RC oscillator and still use the pulse counters to cause a
wake-up event, provided debounce mode is not required.
12.
21.4 Deep Sleep Mode
Deep sleep mode gives the lowest power consumption. All switchable power domains are off and certain functions in
the VDD supply power domain, including the 32kHz oscillator are stopped. This mode can be exited by a power
down, a hardware reset on the RESETN pin, or a DIO event. The DIO event in this mode causes a chip reset to
occur.
© Jennic 2009 JN-DS-JN5148-001 1v2 61
Preliminary
Page 62

Jennic
22 Electrical Characteristics
22.1 Maximum Ratings
Exceeding these conditions may result in damage to the device.
Parameter Min Max
Device supply voltage VDD1, VDD2 -0.3V 3.6V
Supply voltage at voltage regulator bypass pins
VB_xxx
Voltage on analogue pins XTALOUT, XTALIN,
VCOTUNE, RF_IN.
Voltage on analogue pins VREF, ADC1-4, DAC1-2,
COMP1M, COMP1P, COMP2M, COMP2P, IBIAS
Voltage on 5v tolerant digital pins SPICLK,
SPIMOSI, SPIMISO, SPISEL0, DIO08 & DIO11-19,
RESETN
Voltage on 3v tolerant digital pins DIO9, DIO10 -0.3V VDD2 + 0.3V
Storage temperature -40ºC 150ºC
Reflow soldering temperature according to
IPC/JEDEC J-STD-020C
4
1) Testing for Human Body Model discharge is performed as specified in JEDEC Standard JESD22-A114.
2) Testing for Charged Device Model discharge is performed as specified in JEDEC Standard JESD22-C101.
Human Body Model 1 2.0kV ESD rating
Charged Device Model
2
-0.3V 1.98V
-0.3V VB_xxx + 0.3V
-0.3V VDD1 + 0.3V
-0.3V Lower of (VDD2 + 2V)
and 5.5V
260ºC
500V
22.2 DC Electrical Characteristics
22.2.1 Operating Conditions
Supply Min Max
VDD1, VDD2 2.0V 3.6V
Ambient temperature range -40ºC 85ºC
62 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 63

22.2.2 DC Current Consumption
VDD = 2.0 to 3.6V, -40 to +85º C
22.2.2.1 Active Processing
Mode: Min Typ Max Unit Notes
Jennic
CPU processing
32,16,8 or 4MHz
Radio transmit
Radio receive
The following current figures should be added to those above if the feature is being used
ADC 655 µA Temperature sensor and battery
DAC 215 / 235 µA One / both
Comparator 73 / 0.8 µA Fast response time / low-power
UART 90 µA For each UART
Timer 30 µA For each Timer
2-wire serial interface 70 µA
1600 +
280/MHz
15.0 mA
17.5 mA CPU in software doze – radio in
µA SPI, GPIOs enabled. When in
CPU doze the current related to
CPU speed is not consumed.
CPU in software doze – radio
transmitting
receive mode
measurements require ADC
22.2.2.2 Sleep Mode
Mode: Min Typ Max Unit Notes
Sleep mode with I/O wakeup 0.12 µA Waiting on I/O event
Sleep mode with I/O and RC
Oscillator timer wakeup –
measured at 25ºC
32kHz crystal oscillator 1.5 µA As alternative sleep timer
The following current figures should be added to those above if the feature is being used
RAM retention– measured at
25ºC
Comparator (low-power mode) 0.8 µA Reduced response time
1.25 µA As above, but also waiting on timer
event. If both wakeup timers are
enabled then add another 0.05µA
2.2 µA For full 128kB retained
22.2.2.3 Deep Sleep Mode
Mode: Min Typ Max Unit Notes
Deep sleep mode– measured
at 25ºC
100 nA Waiting on chip RESET or I/O
event
© Jennic 2009 JN-DS-JN5148-001 1v2 63
Preliminary
Page 64

Jennic
22.2.3 I/O Characteristics
VDD = 2.0 to 3.6V, -40 to +85º C
Parameter Min Typ Max Unit Notes
Internal DIO pullup
resistors
Digital I/O High Input
(except DIO9, DIO10)
Digital I/O High Input
( DIO9, DIO10)
Digital I/O low Input -0.3 VDD2 x 0.27 V
Digital I/O input hysteresis 140 230 310 mV
DIO High O/P (2.7-3.6V) VDD2 x 0.8 VDD2 V With 4mA load
DIO Low O/P (2.7-3.6V) 0 0.4 V With 4mA load
DIO High O/P (2.2-2.7V) VDD2 x 0.8 VDD2 V With 3mA load
DIO Low O/P (2.2-2.7V) 0 0.4 V With 3mA load
DIO High O/P (2.0-2.2V) VDD2 x 0.8 VDD2 V With 2.5mA load
DIO Low O/P (2.0-2.2V) 0 0.4 V With 2.5mA load
Current sink/source
capability
I
Input Leakage Current 50 nA Vcc = 3.6V, pin low
IL -
I
Input Leakage Current 50 nA Vcc = 3.6V, pin high
IH -
22
24
31
TBA
VDD2 x 0.7 Lower of (VDD2 + 2V)
VDD2 x 0.7 VDD2 V
4
34
40
56
63
3
2.5
53
63
92
TBA
and 5.5V
mA VDD2 = 2.7V to 3.6V
kΩ
V 5V Tolerant I/O only
VDD2 = 3.6V, 25C
VDD2 = 3.0V, 25C
VDD2 = 2.2V, 25C
VDD2 = 2.0V, 25C
VDD2 = 2.2V to 2.7V
VDD2 = 2.0V to 2.2V
22.3 AC Characteristics
22.3.1 Reset and Voltage Brown-Out
V
VDD
Internal RESET
RESETN
Figure 41: Internal Power-on Reset without showing Brown-Out
64 JN-DS-JN5148-001 1v2 © Jennic 2009
POT
t
STAB
Preliminary
Page 65

RESETN
Jennic
t
RST
V
RST
Internal RESET
t
STAB
Figure 42: Externally Applied Reset
VDD = 2.0 to 3.6V, -40 to +85º C
Parameter Min Typ Max Unit Notes
External Reset pulse width
to initiate reset sequence
)
(t
RST
External Reset threshold
voltage (V
RST
)
Internal Power-on Reset
threshold voltage (V
POT
)
Reset stabilisation time
(t
)
STAB
Brown-out Threshold
Voltage (V
TH
)
1
µs
VDD2 x 0.7 V Minimum voltage to
1.47
V Rising
1.42
0.84 ms Note 1
1.95
V Configurable threshold
2.25
Assumes internal pullup
resistor value of 100K
worst case and ~5pF
external capacitance
avoid being reset
Falling
with 4 levels
2.65
2.95
Brown-out Hysteresis
(V
)
HYS
45
60
mV Corresponding to the 4
threshold levels
85
100
1
Time from release of reset to start of executing ROM code. Loading program from Flash occurs in addition to this.
DVDD
VTH + VHYS
VTH
VPOT
Internal BOReset
Internal POR
Figure 43: Power on Reset followed by Brown-out Detect
© Jennic 2009 JN-DS-JN5148-001 1v2 65
Preliminary
Page 66

Jennic
22.3.2 SPI MasterTiming
SS
t
t
CLK
(mode=0,1)
CLK
(mode=2,3)
MISO
(mode=0,2)
MISO
(mode=1,3)
MOSI
(mode=1,3)
MOSI
(mode=0,2)
SSS
t
CK
t
HI
t
SI
t
VO
t
HI
t
SI
t
VO
Figure 44: SPI Timing (Master)
Parameter Symbol Min Max Unit
Clock period tCK 62.5 - ns
Data setup time tSI 16.7 @ 3.3V
18.2 @ 2.7V
21.0 @ 2.0V
Data hold time tHI 0 ns
Data invalid period tVO - 15 ns
Select set-up period t
Select hold period t
60 - ns
SSS
30 (SPICLK = 16MHz)
SSH
0 (SPICLK<16MHz, mode=0 or 2)
60 (SPICLK<16MHz, mode=1 or 3)
SSH
- ns
- ns
22.3.3 Intelligent Peripheral (SPI Slave) Timing
IP_SEL
t
t
sss
t
ck
IP_CLK
tsit
hi
IP_DI
t
lz
t
vo
IP_DO
Figure 45: Intelligent Peripheral (SPI Slave) Timing
66 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
ssh
t
hz
Page 67

Jennic
Parameter Symbol Min Max Unit
Clock period tck 125.0 - ns
Data setup time tsi 15 - ns
Data hold time thi 15 ns
Data invalid period tvo - 40 ns
Select set-up period t
Select hold period t
Select asserted to output data driven tlz 20 ns
Select negated to data output tri-stated thz 20 ns
22.3.4 Two-wire Serial Interface
SIF_D
t
F
SIF_CLK
t
LOW
t
HD;STA
t
R
t
HD;DAT
t
HIGH
Figure 46: Two-wire Serial Interface Timing
15 - ns
sss
15 - ns
ssh
t
SU;DAT
t
HD;STA
t
t
SU;STA
F
Sr P SS
t
SP
t
SU;STO
t
t
BUF
R
Parameter Symbol
Unit
Min Max Min Max
Standard Mode Fast Mode
SIF_CLK clock frequency
Hold time (repeated) START condition.
f
SCL
t
HD:STA
0 100 0 400 kHz
4 - 0.6 - µs
After this period, the first clock pulse is
generated
LOW period of the SIF_CLK clock
HIGH period of the SIF_CLK clock
Set-up time for repeated START condition t
Data setup time SIF_D t
t
LOW
t
HIGH
SU:STA
SU:DAT
4.7 - 1.3 - µs
4 - 0.6 - µs
4.7 - 0.6 - µs
0.25 - 0.1 - µs
Rise Time SIF_D and SIF_CLK tR - 1000 20+0.1Cb 300 ns
Fall Time SIF_D and SIF_CLK tF - 300 20+0.1Cb 300 ns
Set-up time for STOP condition t
Bus free time between a STOP and START
4 - 0.6 - µs
SU:STO
t
4.7 - 1.3 - µs
BUF
condition
Pulse width of spikes that will be
tSP - 60 - 60 ns
suppressed by input filters (Note 1)
Capacitive load for each bus line Cb - 400 - 400 pF
Noise margin at the LOW level for each
Vnl 0.1VDD - 0.1VDD - V
connected device (including hysteresis)
Noise margin at the HIGH level for each
Vnh 0.2VDD - 0.2VDD - V
connected device (including hysteresis)
Note 1: This figure indicates the pulse width that is guaranteed to be suppressed. Pulse with widths up to 125nsec
may alos get suppressed.
© Jennic 2009 JN-DS-JN5148-001 1v2 67
Preliminary
Page 68

Jennic
22.3.5 Four-Wire Digital Audio Interface
t
ck
SCK
WS/SDOUT
SDIN
t
sr
Parameter Symbol
t
hc
t
hr
t
lc
t
dtr
Maximum
Frequency (8MHz)
Generic
Unit
Min Max Min Max
DAI_SCK clock period
LOW period of the DAI_SCK clock
HIGH period of the DAI_SCK clock
Transmit delay time t
t
ck
t
lc
t
hc
- 50 -
dtr
Receive set-up time tsr 25 -
125 - 125 - ns
43 -
43 -
0.35tck
0.35tck
0.2tck
- ns
- ns
0.4tck
ns
- ns
Receive hold time thr 0 - 0 - ns
22.3.6 Wakeup and Boot Load Timings
Parameter Min Typ Max Unit Notes
Time for crystal to stabilise
ready for Boot Load
Time for crystal to stabilise
ready for radio activity
Wake up from Deep Sleep
or from Sleep (memory not
held)
Wake up from Sleep
(memory held)
Wake up from CPU Doze
mode
Wake up from Sleep using
24MHz RC oscillator
(memory held)
0.84 ms Reached oscillator
amplitude threshold
1.0 ms
0.84 + 0.5*
program size in
kBytes
ms Assumes SPI clock to
external Flash is
16MHz
0.84 ms
0.2 µs
0.29 ms
68 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 69

22.3.7 Bandgap Reference
VDD = 2.0 to 3.6V, -40 to +85ºC
Parameter Min Typ Max Unit Notes
Voltage 1.19 V
DC power supply rejection 58 dB at 25ºC
Jennic
Temperature coefficient -35
+30
Point of inflexion +25 ºC
ppm/ºC 20 to 85ºC
-40ºC to 20ºC
22.3.8 Analogue to Digital Converters
VDD = 3.0V, VREF = 1.2V, -40 to +85ºC
Parameter Min Typ Max Unit Notes
Resolution 12 bits 500kHz Clock
Current consumption 655 µA
Integral nonlinearity ± 5 LSB 0 to Vref range
Differential nonlinearity -1 +2 LSB Guaranteed monotonic
Offset error + 10 mV
Gain error - 20 mV
Internal clock 500 kHz
No. internal clock periods
to sample input
2, 4, 6 or 8 Programmable
16MHz input clock, ÷32
Conversion time 40 µs 500kHz Clock with
sample period of 2
Input voltage range 0.04 Vref
or 2*Vref
Vref (Internal) See Section 22.3.7 Bandgap Reference
Vref (External) 1.15 1.2 1.6 V Allowable range into
Input capacitance 8 pF In series with 5K ohms
V Switchable. Refer to
20.1.1
VREF pin
© Jennic 2009 JN-DS-JN5148-001 1v2 69
Preliminary
Page 70

Jennic
22.3.9 Digital to Analogue Converters
VDD = 3.0V, VREF = 1.2V, -40 to +85ºC
Parameter Min Typ Max Unit Notes
Resolution 12 bits
Current consumption 215 (single)
235 (both)
Integral nonlinearity ± 2 LSB
Differential nonlinearity -1 +1 LSB Guaranteed monotonic
Offset error ± 10 mV
Gain error ± 10 mV
Internal clock 2MHz,
1MHz,
500kHz,
250kHz
Output settling time to
0.5LSB
Minimum Update time 10 µs 2MHz Clock with
Output voltage swing 0 Lower of Vdd-1.2 and Vref V Output voltage swing
Output voltage swing 0 Lower of 2x(Vdd-1.2 ) and
Vref (Internal) See Section 22.3.7 Bandgap Reference
5 µs With 10k ohms & 20pF
Vdd-0.2 and 2xVref
µA
16MHz input clock,
programmable
prescaler
load
sample period of 2
Gain =0
V Output voltage swing
Gain =1
VREF (External) 0.8 1.2 1.6 V Allowable range into
VREF pin
Resistive load 10 kΩ To ground
Capacitive load 20 pF
Digital input coding Binary
70 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 71

22.3.10 Comparators
VDD = 2.0 to 3.6V -40 to +85ºC
Parameter Min Typ Max Unit Notes
Jennic
Analogue response time
(normal)
Total response time
(normal) including delay to
Interrupt controller
Analogue response time
(low power)
Hysteresis 10
Vref (Internal) See Section 22.3.7 Bandgap Reference V
Common Mode input range 0 Vdd V
Current (normal mode) 73 µA
Current (low power mode) 0.8 µA
80 125 ns +/- 250mV overdrive
105 + 125 ns Digital delay can be
2.4
20
40
mV Programmable in 3
µs +/- 250mV overdrive
22.3.11 32kHz RC Oscillator
VDD = 2.0 to 3.6V, -40 to +85 ºC
10pF load
up to a max. of two
16MHz clock periods
No digital delay
steps and zero
Parameter Min Typ Max Unit Notes
Current consumption of cell
and counter logic
32kHz clock native
accuracy
Calibrated 32kHz accuracy ±250 ppm For a 1 second sleep
Variation with temperature -0.010 %/°C
Variation with VDD2 -1.1 %/V
1.45
1.25
1.05
-30% 32kHz +30%
µA 3.6V
3.0V
2.0v
Typical is at 3.0V 25°C
period calibrating over
20 x 32kHz clock
periods
© Jennic 2009 JN-DS-JN5148-001 1v2 71
Preliminary
Page 72

Jennic
22.3.12 32kHz Crystal Oscillator
VDD = 2.0 to 3.6V, -40 to +85ºC
Parameter Min Typ Max Unit Notes
Current consumption of cell
and counter logic
Start – up time 0.8 s Assuming xtal with ESR of
Input capacitance 1.4 pF Bondpad and package
Transconductance 17 uA/V
External Capacitors
(CL=9pF)
Amplitude at Xout Vdd-0.2 Vp-p
1.5 µA This is sensitive to the ESR
of the crystal,Vdd and total
capacitance at each pin
les than 40kohms and CL=
9pF External caps = 15pF
(Vdd/2mV pk-pk) see
Appendix B
15 pF Total external capacitance
needs to be 2*CL, allowing
for stray capacitance from
chip, package and PCB
22.3.13 32MHz Crystal Oscillator
VDD = 2.0 to 3.6V, -40 to +85ºC
Parameter Min Typ Max Unit Notes
Current consumption 400 µA Excluding bandgap ref.
Start – up time 0.84 ms Assuming xtal with ESR of
les than 40ohms and CL=
9pF External caps = 15pF
Appendix B
see
Input capacitance 1.4 pF Bondpad and package
Transconductance 4.3 mA/V
DC voltages, XTALIN,
XTALOUT
External Capacitors
(CL=9pF)
Amplitude detect threshold 320 mVp-p Threshold detection
430/470 mV
15 pF Total external capacitance
needs to be 2*CL, allowing
for stray capacitance from
chip, package and PCB
accessible via API
72 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 73

22.3.14 24MHz RC Oscillator
VDD = 2.0 to 3.6V, -40 to +85ºC
Parameter Min Typ Max Unit Notes
Current consumption of cell 160 µA
Clock native accuracy -22% 24MHz +28%
Jennic
Calibrated centre frequency
accuracy
Variation with temperature -0.015 %/°C
Variation with VDD2 0.15 %/V
Startup time 1 us
-7% 24MHz +7%
22.3.15 Temperature Sensor
VDD = 2.0 to 3.6V, -40 to +85ºC
Parameter Min Typ Max Unit Notes
Operating Range -40 - 85
Sensor Gain -1.44 -1.55 -1.66
Accuracy - -
Non-linearity - - 2.5
Output Voltage 630 855 mV Includes absolute variation
Typical Voltage 745 mV
Resolution 0.154 0.182 0.209
±10 °C
°C
mV/°C
°C
°C/LSB
due to manufacturing & temp
Typical at 3.0V 25°C
0 to Vref ADC I/P Range
© Jennic 2009 JN-DS-JN5148-001 1v2 73
Preliminary
Page 74

Jennic
22.3.16 Radio Transceiver
This JN5148 meets all the requirements of the IEEE802.15.4 standard over 2.0 - 3.6V and offers the following
improved RF characteristics. All RF characteristics are measured single ended.
This part also meets the following regulatory body approvals, when used with Jennic’s Module Reference Designs.
Compliant with FCC part 15, rules, IC Canada, ETSI ETS 300-328 and Japan ARIB STD-T66
The PCB schematic and layout rules detailed in Appendix
B.4 must be followed. Failure to do so will likely result in the
JN5148 failing to meet the performance specification detailed
herein and worst case may result in device not functioning in the
end application.
Parameter Min Typical Max Notes
RF Port Characteristics
Type Single Ended
Impedance
Frequency range 2.400 GHz 2.485GHz
ESD levels (pin 17) TDB
1) With external matching inductors and assuming PCB layout as in Appendix B.4.
1
50ohm 2.4-2.5GHz
74 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 75

Radio Parameters: 2.0-3.6V, +25ºC
Parameter Min Typical Max Unit Notes
Receiver Characteristics
Receive sensitivity -95 dBm Nominal for 1% PER, as per
802.15.4 section 6.5.3.3
Maximum input signal +5 dBm For 1% PER, measured as
sensitivity
Jennic
Adjacent channel
rejection (-1/+1 ch)
[CW Interferer]
Alternate channel
rejection (-2 / +2 ch)
[CW Interferer]
Other in band rejection
2.4 to 2.4835 GHz,
excluding adj channels
Out of band rejection 52 dBc For 1% PER with wanted signal
Spurious emissions
(RX)
Intermodulation
protection
19/34
[TBC]
40/45
[TBC]
48 dBc For 1% PER with wanted signal
<-70
-61
40 dB For 1% PER at with wanted signal
dBc For 1% PER, with wanted signal
3dB, above sensitivity. (Note1,2)
(modulated interferer)
dBc For 1% PER, with wanted signal
3dB, above sensitivity. (Note1,2)
(modulated interferer)
3dB above sensitivity. (Note1)
3dB above sensitivity. All
frequencies except wanted/2 which
is 8dB lower. (Note1)
-58
dBm Measured conducted into 50ohms
30MHz to 1GHz
1GHz to 12GHz
3dB above sensitivity. Modulated
Interferers at 2 & 4 channel
separation (Note1)
RSSI linearity -4 +4 dB -95 to -10dBm.
Available through Hardware API
Transmitter Characteristics
Transmit power +2.5 dBm
Output power control
range
Spurious emissions
(TX)
EVM [Offset] 10 [2.0] 15 % At maximum output power
Transmit Power
Spectral Density
© Jennic 2009 JN-DS-JN5148-001 1v2 75
-35 dB In three 12dB steps (Note3)
<-70
-40
<-70
-38 -20 dBc At greater than 3.5MHz offset, as
dBm Measured conducted into 50ohms
30MHz to 1GHz,
1GHz to12.5GHz,
The following exceptions apply
1.8 to 1.9GHz & 5.15 to 5.3GHz
per 802.15.4, section 6.5.3.1
Preliminary
Page 76

Jennic
Radio Parameters: 2.0-3.6V, -40ºC
Parameter Min Typical Max Unit Notes
Receiver Characteristics
Receive sensitivity -96.5 dBm Nominal for 1% PER, as per
802.15.4 section 6.5.3.3
Maximum input signal +9 dBm For 1% PER, measured as
sensitivity
Adjacent channel
rejection (-1/+1 ch)
[CW Interferer]
Alternate channel
rejection (-2 / +2 ch)
[CW Interferer]
Other in band rejection
2.4 to 2.4835 GHz,
excluding adj channels
Out of band rejection 49 dBc For 1% PER with wanted signal
Spurious emissions
(RX)
Intermodulation
protection
19/34
[TBC]
40/45
[TBC]
47 dBc For 1% PER with wanted signal
<-70
-60
39 dB For 1% PER at with wanted signal
dBc For 1% PER, with wanted signal
3dB, above sensitivity. (Note1,2)
(modulated interferer)
dBc For 1% PER, with wanted signal
3dB, above sensitivity. (Note1,2)
(modulated interferer)
3dB above sensitivity. (Note1)
3dB above sensitivity. All
frequencies except wanted/2 which
is 8dB lower. (Note1)
-57
dBm Measured conducted into 50ohms
30MHz to 1GHz
1GHz to 12GHz
3dB above sensitivity. Modulated
Interferers at 2 & 4 channel
separation (Note1)
RSSI linearity -4 +4 dB -95 to -10dBm.
Available through Hardware API
Transmitter Characteristics
Transmit power +2.75 dBm
Output power control
range
Spurious emissions
(TX)
EVM [Offset] 9 [2.0] 15 % At maximum output power
Transmit Power
Spectral Density
76 JN-DS-JN5148-001 1v2 © Jennic 2009
-35 dB In three 12dB steps (Note3)
<-70
-40
<-70
-38 -20 dBc At greater than 3.5MHz offset, as
dBm Measured conducted into 50ohms
30MHz to 1GHz,
1GHz to12.5GHz,
The following exceptions apply
1.8 to 1.9GHz & 5.15 to 5.3GHz
per 802.15.4, section 6.5.3.1
Preliminary
Page 77

Radio Parameters: 2.0-3.6V, +85ºC
Parameter Min Typical Max Unit Notes
Receiver Characteristics
Receive sensitivity -93 dBm Nominal for 1% PER, as per
802.15.4 section 6.5.3.3
Maximum input signal +3 dBm For 1% PER, measured as
sensitivity
Jennic
Adjacent channel
rejection (-1/+1 ch)
[CW Interferer]
Alternate channel
rejection (-2 / +2 ch)
[CW Interferer]
Other in band rejection
2.4 to 2.4835 GHz,
excluding adj channels
Out of band rejection 53 dBc For 1% PER with wanted signal
Spurious emissions
(RX)
Intermodulation
protection
19/34
[TBC]
40/45
[TBC]
49 dBc For 1% PER with wanted signal
<-70
-62
41 dB For 1% PER at with wanted signal
dBc For 1% PER, with wanted signal
3dB, above sensitivity. (Note1,2)
(modulated interferer)
dBc For 1% PER, with wanted signal
3dB, above sensitivity. (Note1,2)
(modulated interferer)
3dB above sensitivity. (Note1)
3dB above sensitivity. All
frequencies except wanted/2 which
is 8dB lower. (Note1)
-59
dBm Measured conducted into 50ohms
30MHz to 1GHz
1GHz to 12GHz
3dB above sensitivity. Modulated
Interferers at 2 & 4 channel
separation (Note1)
RSSI linearity -4 +4 dB -95 to -10dBm.
Available through Hardware API
Transmitter Characteristics
Transmit power +1.8 dBm
Output power control
range
Spurious emissions
(TX)
EVM [Offset] 10 [2.0] 15 % At maximum output power
Transmit Power
Spectral Density
© Jennic 2009 JN-DS-JN5148-001 1v2 77
-35 dB In three 12dB steps (Note3)
<-70
-40
<-70
-38 -20 dBc At greater than 3.5MHz offset, as
dBm Measured conducted into 50ohms
30MHz to 1GHz,
1GHz to12.5GHz,
The following exceptions apply
1.8 to 1.9GHz & 5.15 to 5.3GHz
per 802.15.4, section 6.5.3.1
Preliminary
Page 78

Jennic
Note1: Blocker rejection is defined as the value, when 1% PER is seen with the wanted signal 3dB above sensitivity,
as per 802.15.4 section 6.5.3.4
Note2: Channels 11,17,24 low/high values reversed.
Note3: Up to an extra 2.5dB of attenuation is available if required.
78 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 79

Appendix A Mechanical and Ordering Information
A.1 56-pin QFN Package Drawing
Controlling Dimension: mm
Symbol
Tolerances of Form and Position
millimetres
Min. Nom. Max.
A ------ ------ 0.9
A1 0.00 0.01 0.05
A2 ------ 0.65 0.7
A3 0.20 Ref.
b 0.2 0.25 0.3
D 8.00 bsc
D1 7.75 bsc
D2 6.20 6.40 6.60
E 8.00 bsc
E1 7.75 bsc
E2 6.20 6.40 6.60
L 0.30 0.40 0.50
e 0.50 bsc
υ1
R 0.09 ------ ------
aaa 0.10
bbb 0.10
ccc 0.05
0° ------ 12°
Jennic
Figure 47: 56-pin QFN Package Drawings
© Jennic 2009 JN-DS-JN5148-001 1v2 79
Preliminary
Page 80

Jennic
A.2 PCB Decal
The following PCB decal is recommended; all dimensions are in millimetres (mm).
Figure 48: PCB Decal
The PCB schematic and layout rules detailed in Appendix B.4 must
be followed. Failure to do so will likely result in the JN5148 failing
to meet the performance specification detailed herein and worst
case may result in device not functioning in the end application.
80 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 81

Jennic
A.3 Ordering Information
The standard qualification for the JN5148 is Industrial temperature range: -40ºC to +85ºC, packaged in a 56-pin QFN
package.
Ordering Format:
JN5148 - XXX - Y
Part Number:
JN5148: Wireless microcontroller identifier
XXX: ROM Variant:
001 Supports all available networking stacks
Y
: Shipping:
1
T Tape mounted 2500 devices on a 330mm reel
X Tape mounted 500 devices on a 180mm reel
V Tape mounted 1000 devices on a 180mm reel
Y Tape mounted less than 500 devices (no reel, no dry package, insert quantity after Y, SSM is 50)
Valid Order Codes:
1
Part Number Description
JN5148-001-T JN5148 Wireless Microcontroller – 2500 devices on a 330mm reel
JN5148-001-X JN5148 Wireless Microcontroller – 500 devices on a 180mm reel
JN5148-001-V JN5148 Wireless Microcontroller – 1000 devices on a 180mm reel
JN5148-001-Y150 JN5148 Wireless Microcontroller – 150 devices, no reel, no dry package
Where this Data Sheet is denoted as “Advanced” or “Preliminary”, devices will be either Engineering Samples or
Prototypes. Devices of this status are marked with an Rx suffix after the ROM identifier to identify the revision of
silicon during these product phases - for example JN5148-001
The Standard Supply Multiple (SSM) for Engineering Samples or Prototypes is 50 units with a maximum of 250 units.
If the quantity of Engineering Samples or Prototypes ordered is less than a reel quantity, then these will be shipped in
tape form only, with no reel and will not be dry packaged in a moisture sensitive environment.
The SSM for Production status devices is one reel, all reels are dry packaged in a moisture sensitive bag see
R1-T.
A.5.3.
© Jennic 2009 JN-DS-JN5148-001 1v2 81
Preliminary
Page 82

Jennic
A.4 Device Package Marking
The diagram below shows the package markings for JN5148. The package on the left along with the legend
information below it, shows the general format of package marking. The package on the right shows the specific
markings for a JN5148-001 device, that came from assembly build number 1000135 and was manufactured week 12
of 2008.
Jennic
JN XXXX -SSS
FFFFFFF
YYWW
Figure 49: Device Package Marking
Legend:
JN Jennic
XXXX 4 digit part number
SSS 3 digit software ROM identifier
FFFFFFF 7 digit assembly build number
YY 2 digit year number
WW 2 digit week number
Where this Data Sheet is denoted as “Advanced” or “Preliminary”, devices will be either Engineering Samples or
Prototypes. Devices of this status have an Rx suffix after the software ROM identifier, for example JN5148-001
Jennic
JN5148-001
1000135
0812
R1.
82 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 83

A.5 Tape and Reel Information
A.5.1 Tape Orientation and Dimensions
The general orientation of the 56QFN package in the tape is as shown in Figure 50.
Figure 50: Tape and Reel Orientation
Figure 51 shows the detailed dimensions of the tape used for 8x8mm 56QFN devices.
Jennic
Reference Dimensions (mm)
Ao
Bo
Ko
P
T
W 16.00 +0.30/-0.10
Figure 51: Tape Dimensions
8.30 ±0.10
8.30 ±0.10
1.10 ±0.10
12.00 ±0.10
0.30 ±0.10
© Jennic 2009 JN-DS-JN5148-001 1v2 83
Preliminary
Page 84

Jennic
A.5.2 Reel Information: 180mm Reel
Surface Resistivity Between 10e9 – 10e11 Ohms Square
Material High Impact Polystyrene, environmentally friendly, recyclable
All dimensions and tolerances are fully compliant with EIA-481-B and are specified in millimetres.
6 window design with one window on each side blanked to allow adequate labelling space.
Tape Width A B (min) C N W (min) W (max)
16 180 1.5min 13 ±0.2 60 +0.1 –0.0 16.40 17.90
Figure 52: Reel Dimensions
84 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 85

A.5.3 Reel Information: 330mm Reel
Surface Resistivity Between 10e
Material High Impact Polystyrene with Antistatic Additive
All dimensions and tolerances are fully compliant with EIA-481-B and are specified in millimetres.
3 window design to allow adequate labelling space.
9
– 10e11 Ohms Square
Jennic
Tape Width A B (min) C D (min) N (min) W (min) W (max)
16 330 1.5 13 +0.5 -0.2 20.2 100 15.90 19.40
A.5.4 Dry Pack Requirement for Moisture Sensitive Material
Moisture sensitive material, as classified by JEDEC standard J-STD-033, must be dry packed. The 56 lead QFN
package is MSL2A/260
67.5 grams of activated clay and a 6 spot humidity indicator card (HIC) meeting MIL-L-8835 specification. The MBB
has a moisture-sensitivity caution label to indicate the moisture-sensitive classification of the enclosed devices.
°
C, and is dried before sealing in a moisture barrier bag (MBB) with desiccant bag weighing at
© Jennic 2009 JN-DS-JN5148-001 1v2 85
Preliminary
Page 86

Jennic
×
++=
Appendix B Development Support
B.1 Crystal Oscillators
This section covers some of the general background to crystal oscillators, to help the user make informed decisions
concerning the choice of crystal and the associated capacitors.
B.1.1 Crystal Equivalent Circuit
Cs
Lm
Where
mR is the equivalent series resistance ( ESR ).
mC is the motional capacitance
mL is the motional inductance. This together with mC defines the oscillation frequency (series)
SC is the shunt or package capacitance and this is a parasitic
Rm
Cm
C2C1
B.1.2 Crystal Load Capacitance
The crystal load capacitance is the total capacitance seen at the crystal pins, from all sources. As the load
capacitance (CL) affects the oscillation frequency by a process known as ‘pulling’, crystal manufacturers specify the
frequency for a given load capacitance only. A typical pulling coefficient is 15ppm/pF, to put this into context the
maximum frequency error in the IEEE802.15.4 specification is +/-40ppm for the transmitted signal. Therefore, it is
important for resonance at 32MHz exactly, that the specified load capacitance is provided.
The load capacitance can be calculated using:
TT
2121TT
CCCC+
Total capacitance
CL =
inPT CCCC 1111
Where
Similarly for
Hence for a 9pF load capacitance, and a tight layout the external capacitors should be 15pF
86 JN-DS-JN5148-001 1v2 © Jennic 2009
1C is the capacitor component
PC1 is the PCB parasitic capacitance. With the recommended layout this is about 1.6pF
inC1 is the on-chip parasitic capacitance and is about 1.4pF typically.
2TC
Preliminary
Page 87

Jennic
g
ω
×++
×
ω
g
B.1.3 Crystal ESR and Required Transconductance
The resistor in the crystal equivalent circuit represents the energy lost. To maintain oscillation, power must be
supplied by the amplifier, but how much? Firstly, the Pi connected capacitors C
apply an impedance transformation to Rm, when viewed from the amplifier. This new value is given by:
2
⎛
=
⎜
mm
RR
⎜
C
⎝
ˆ
The amplifier is a transconductance amplifier, which takes a voltage and produces an output current. The amplifier
together with the capacitors C1 and C2, form a circuit, which provides a negative resistance, when viewed from the
crystal. The value of which is given by:
NEG
R
=
CC
m
Where
is the transconductance
⎞
CC
+
LS
⎟
⎟
L
⎠
g
m
21
ω
××
TT
and C2 with CS from the crystal,
1
2
Derivations of these formulas can be easily found in textbooks.
In order to give quick and reliable oscillator start-up, a common rule of thumb is to set the amplifier negative
resistance to be a minimum of 4 times the effective crystal resistance. This gives
This can be used to give an equation for the required transconductance.
is the frequency in rad/s
2
C
+
⎞
CC
LS
⎟
⎟
L
⎠
g
≥
2
ω
×× TTmCC
21
⎛
⎜
m
4
R
⎜
⎝
2
m
g
≥
Example: Using typical 32MHz crystal parameters of
capacitance of 9pF), the equation above gives the required transconductance (
typical value for transconductance of 4.3mA/V
The example and equation illustrate the trade-off that exists between the load capacitance and crystal ESR. For
example, a crystal with a higher load capacitance can be used, but the value of max. ESR that can be tolerated is
reduced. Also note, that the circuit sensitivity to external capacitance [ C
Meeting the criteria for start-up is only one aspect of the way these parameters affect performance, they also affect
the time taken during start-up to reach a given, (or full), amplitude. Unfortunately, there is no simple mathematical
model for this, but the trend is the same. Therefore, both a larger load capacitance and larger crystal ESR will give a
longer start-up time, which has the disadvantages of reduced battery life and increased latency.
mR =40Ω, SC =1pF and 1TC = 2TC =18pF ( for a load
×
21
TT
CC
, C2 ] is a square law.
1
2
CCCCCR
2121
TTTTSm
])([4
m
) as 2.59mA/V. The JN5148 has a
© Jennic 2009 JN-DS-JN5148-001 1v2 87
Preliminary
Page 88

Jennic
B.2 32MHz Oscillator
The JN5148 contains the necessary on-chip components to build a 32 MHz reference oscillator with the addition of
an external crystal resonator, two tuning capacitors. The schematic of these components are shown in
The two capacitors, C1 and C2, will typically be 15pF ±5% and use a COG dielectric. For a detailed specification of
the crystal required and factors affecting C1 and C2 see Appendix
especially important, both to keep parasitic capacitors to a minimum and to reduce the possibility of PCB noise being
coupled into the oscillator.
B.1. As with all crystal oscillators the PCB layout is
Figure 53.
JN5148
XTALIN
R1
XTALOUT
C2 C1
Figure 53: Crystal oscillator connections
The clock generated by this oscillator provides the reference for most of the JN5148 subsystems, including the
transceiver, processor, memory and digital and analogue peripherals.
32MHz Crystal Requirements
Parameter Min Typ Max Notes
Crystal Frequency 32MHz
Crystal Tolerance 40ppm Including temperature
Crystal ESR Range (Rm)
10Ω
60Ω
See below for more
Crystal Load Capacitance
Range (CL)
6pF 9pF 12pF See below for more
Not all Combinations of Crystal Load Capacitance and ESR are Valid
Recommended Crystal
External Capacitors (C1 & C2)
For recommended Crystal
88 JN-DS-JN5148-001 1v2 © Jennic 2009
Load Capacitance 9pF and max ESR 40 Ω
15pF
Preliminary
CL = 9pF, total external
capacitance needs to be
2*CL. , allowing for stray
capacitance from chip,
package and PCB
Page 89

Jennic
As is stated above, not all combinations of crystal load capacitance and ESR are valid, and as explained in Appendix
B.1.3 there is a trade-off that exists between the load capacitance and crystal ESR to achieve reliable performance.
For this reason, we recommend that for a 9pF load capacitance crystals be specified with a maximum ESR of 40
ohms. For lower load capacitances the recommended maximum ESR rises, for example, CL=7pF the max ESR is 61
ohms. For the lower cost crystals in the large HC49 package, a load capacitance of 9 or 10pF is widely available and
the max ESR of 30 ohms specified by many manufacturers is acceptable. Also available in this package style, are
crystals with a load capacitance of 12pF, but in this case the max ESR required is 25 ohms or better.
Below is measurement data showing the variation of the crystal oscillator amplifier transconductance with
temperature and supply voltage, notice how small the variation is. Circuit techniques have been used to apply
compensation, such that the user need only design for nominal conditions.
32MHz Crystal Oscillator
4.35
4.3
4.25
4.2
4.15
Transconductance (mA/V)
4.1
-40 -20 0 20 40 60 80 100
Temperature (C)
32MHz Crystal Oscillator
4.31
4.3
4.29
Transconductance (mA/V)
4.28
2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6
Supply Voltage (VDD)
© Jennic 2009 JN-DS-JN5148-001 1v2 89
Preliminary
Page 90

Jennic
)
Ω
Ω
Ω
B.3 32kHz Oscillator
In order to obtain more accurate sleep periods, the JN5148 contains the necessary on-chip components to build an
optional 32kHz oscillator with the addition of an external 32.768kHz crystal and two tuning capacitors. The crystal
should be connected between XTAL32K_IN and XTAL32K_OUT (DIO9 and DIO10), with two equal capacitors to
ground, one on each pin. The schematic of these components are shown in
C2, will typically be in the range 10 to 22pF ±5% and use a COG dielectric. As with all crystal oscillators the PCB
layout is especially important, both to keep parasitic capacitors to a minimum and to reduce the possibility of PCB
noise being coupled into the oscillator.
Figure 54. The two capacitors, C1 and
JN5148
XTAL32K_OUT XTAL32K_IN
Figure 54: 32kHz crystal oscillator connections
The electrical specification of the oscillator can be found in 22.3.12. The oscillator cell is flexible and can operate with
a range of commonly available 32kHz crystals with load capacitances from 6 to 12.5p, and ESR up to 80KΩ. It
achieves this by using automatic gain control (AGC), which senses the signal swing. As explained in Appendix
there is a trade-off that exists between the load capacitance and crystal ESR to achieve reliable performance. The
use of an AGC function allows a wider range of crystal load capacitors and ESR’s to be accommodated than would
otherwise be possible. However, this benefit does mean the supply current varies with the supply voltage (VDD),
value of the total capacitance at each pin, and the crystal ESR. This is described in the table and graphs below.
32kHz Crystal Requirements
Parameter Min Typ Max Notes
Crystal Frequency 32kHz
Supply Current 1.6uA
Supply Current Temp. Coeff. 0.1%/ C Vdd=3v
Crystal ESR Range (Rm
Crystal Load Capacitance
10K
6pF 9pF 12.5pF See below for more details
25K
80K
Vdd=3v, temp=25 C, load
cap =9pF, Rm=25K
See below for more details
B.1.3
90 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 91

Jennic
Three examples of typical crystals are given, each with the value of external capacitors to use, plus the likely supply
current and start-up time that can be expected. Also given is the maximum recommended ESR based on the start-up
criteria given in Appendix
Appendix
B.1.2 .
Load Capacitance Ext Capacitors Current Start-up Time Max ESR
B.1.3. The values of the external capacitors can be calculated using the equation in
9pF 15pF 1.6uA 0.8Sec
6pF 9pF 1.4uA 0.6sec
12.5pF 22pF 2.4uA 1.1sec
Below is measurement data showing the variation of the crystal oscillator supply current with voltage and with crystal
ESR, for two load capacitances.
70KΩ
80KΩ
35KΩ
32KHz Crystal Oscillator Current
1.6
1.4
1.2
1
0.8
Normalised Current (IDD)
0.6
2.2 2.4 2.6 2.8 3 3.2 3.4 3.6
Supply V oltage (VDD)
32KHz Crystal Oscillator Current
1.6
1.4
1.2
1
0.8
Normalised Current (IDD)
0.6
10 20 30 40 50 60 70 80
Crystal ESR (K ohm)
9pF
12.5pF
© Jennic 2009 JN-DS-JN5148-001 1v2 91
Preliminary
Page 92

Jennic
B.4 JN5148 Module Reference Designs
For customers wishing to integrate the JN5148 device directly into their system, Jennic provide a range of Module
Reference Designs, covering standard and high-power modules fitted with different Antennae
To ensure the correct performance, it is strongly recommended that where possible the design details provided by the
reference designs, are used in their exact form for all end designs, this includes component values, pad dimensions,
track layouts etc. In order to minimise all risks, it is recommended that the entire layout of the appropriate reference
module, if possible, be replicated in the end design.
For full detail please consult the Standard Module Reference Design JN-RD-6001
Jennic Support web site
(www.jennic.com/support)
[7] , available to download from the
B.4.1 Schematic Diagram
A schematic diagram of the JN5148 PCB antenna reference module is shown in Figure 55. Details of component
values and PCB layout constraints can be found in
Table 8.
Figure 55: JN5148 Printed Antenna Reference Module Schematic Diagram
92 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 93

Jennic
Component
Designator
C13 10uF Power source decoupling
C14 100nF Analogue Power decoupling Adjacent to U1 pin 13
C16 100nF Digital power decoupling Adjacent to U1 pin 49
C15 100nF VB Synth decoupling Less than 5mm from U1 pin 10
C18 47pF VB Synth decoupling Less than 5mm from U1 pin 10
C2 10nF VB VCO decoupling Less than 5mm from U1 pin 12
C24 47pF VB VCO decoupling Less than 5mm from U1 pin 12
C3 100nF VB RF decoupling Less than 5mm from U1 pin 16 and U1 pin 18
C12 47pF VB RF decoupling Less than 5mm from U1 pin 16 and U1 pin 18
C8 100nF VB A decoupling Less than 5mm from U1 pin 27
C9 47pF VB A decoupling Less than 5mm from U1 pin 27
C6 100nF VB RAM decoupling Less than 5mm from U1 pin 35
C7 100nF VB Dig decoupling Less than 5mm from U1 pin 40
R1 43k I Bias Resistor Less than 5mm from U1 pin 14
C20 100nF Vref decoupling Less than 5mm from U1 pin 15
U2 4Mbit Serial Flash Memory (Numonyx M25P40A)
Y1 32MHz Crystal (Toyocom TSX 3225) (CL = 9pF, Max ESR 40R)
C10 15pF +/-5% COG Crystal Load Capacitor Adjacent to pin 8 and Y1 pin 1
C11 15pF +/-5% COG Crystal Load Capacitor Adjacent to pin 9 and Y1 pin 3
R2 Not fitted
C1 47pF AC Coupling
L1 5.6nH RF Matching Inductor
L2 2.7nH Load Inductor
The paddle should be connected directly to ground. Any pads that requiring connection to ground should do so by
connecting directly to the paddle.
Value/Type Function PCB Layout Constraints
Must be copied directly from the reference design.
Phycomp 2238-869-15479
Johanson L-07C5N6SV6S
MuRata LQP15MN2N7B02
Table 8: JN5148 Printed Antenna Reference Module Components and PCB Layout Constraints
© Jennic 2009 JN-DS-JN5148-001 1v2 93
Preliminary
Page 94

Jennic
B.4.2 PCB Design and Reflow Profile
PCB and land pattern designs are key to the reliability of any electronic circuit design.
The Institute for Interconnecting and Packaging Electronic Circuits (IPC) defines a number of standards for electronic
devices. One of these is the "Surface Mount Design and Land Pattern Standard" IPC-SM-782
to as “IPC782". This specification defines the physical packaging characteristics and land patterns for a range of
surface mounted devices. IPC782 is also a useful reference document for general surface mount design techniques,
containing sections on design requirements, reliability and testability. Jennic strongly recommends that this be
referred to when designing the PCB.
The suggested reflow profile is shown in
temperature, soak times, time above liquidus and ramp rates should also be referenced.
Figure 56. The specific paste manufacturers guidelines on peak flow
[4], commonly referred
Figure 56: Recommended Reflow Profile for Lead-free Sol der Paste or PPF lead frame
94 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 95

Jennic
Related Documents
[1] IEEE Std 802.15.4-2003 IEEE Standard for Information Technology – Part 15.4 Wireless Medium Access Control
(MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal Area Networks (LR-WPANs).
[2] JN-AN-1062 Using OTP efuse Memory
[3] JN-AN-1038 Programming Flash devices not supported by the JN51xx ROM-based bootloader
[4] IPC-SM-782 Surface Mount Design and Land Pattern Standard
[5] JN-AN-1118 JN5148 Application Debugging
[6] JN-RM-2001 Integrated Peripherals API Reference Manual
[7] JN-RD-6001 Standard Module Reference Design
[8] JN-AN-1003 Boot Loader Operation
RoHS Compliance
JN5148 devices meet the requirements of Directive 2002/95/EC of the European Parliament and of the Council on
the Restriction of Hazardous Substance (RoHS) and of the China RoHS (SJ/T11363 – 2006) requirements which
came into force on 1st March 2007.
Status Information
The status of this Data Sheet is . Preliminary
Jennic products progress according to the following format:
Advance
The Data Sheet shows the specification of a product in planning or in development.
The functionality and electrical performance specifications are target values of the design and may be used as a
guide to the final specification. Integrated circuits are identified with an Rx suffix, for example JN5148-001R1.
Jennic reserves the right to make changes to the product specification at anytime without notice.
Preliminary
The Data Sheet shows the specification of a product that is commercially available, but is not yet fully qualified.
The functionality of the product is final. The electrical performance specifications are target values and may used as a
guide to the final specification. Integrated circuits are identified with an Rx suffix, for example JN5148-001R1.
Jennic reserves the right to make changes to the product specification at anytime without notice.
Production
This is the final Data Sheet for the product.
All functional and electrical performance specifications, including minimum and maximum values are final.
This Data Sheet supersedes all previous document versions.
Jennic reserves the right to make changes to the product specification at anytime.
© Jennic 2009 JN-DS-JN5148-001 1v2 95
Preliminary
Page 96

Jennic
Disclaimers
The contents of this document are subject to change without notice. Jennic reserves the right to make changes,
without notice, in the products, including circuits and/or software, described or contained here in. Information
contained in this document regarding device applications and the like is intended through suggestion only and may
be superseded by updates. It is your responsibility to ensure that your application meets with your specifications.
Jennic warrants performance of its hardware products to the specifications applicable at the time of sale in
accordance with Jennic’s standard warranty. Testing and other quality control techniques are used to the extent
Jennic deems necessary to support this warranty. Except where mandatory by government requirements, testing of
all parameters of each product is not necessarily performed.
Jennic assumes no responsibility or liability for the use of any of these products, conveys no license or title under any
patent, copyright, or mask work right to these products, and makes no representations or warranties that these
products are free from patent, copyright, or mask work infringement, unless otherwise specified.
Jennic products are not intended for use in life support systems, appliances or systems where malfunction of these
products can reasonably be expected to result in personal injury, death or severe property or environmental damage.
Jennic customers using or selling these products for use in such applications do so at their own risk and agree to fully
indemnify Jennic for any damages resulting from such use.
All products are sold subject to Jennic's terms and conditions of sale supplied at the time of order acknowledgment.
All trademarks are the property of their respective owners.
Version Control
Version Notes
1.0 12th December 2008 – First issue, released as Advance Information
1.1 15th May 2009 – Major revision
1.2 15th July – Released as Preliminary and revised Electrical Parameters section
96 JN-DS-JN5148-001 1v2 © Jennic 2009
Preliminary
Page 97

Contact Details
For the contact details of your local Jennic office or distributor, refer to the Jennic web site:
Jennic Ltd
Furnival Street
Sheffield
S1 4QT
United Kingdom
Tel: +44 (0)114 281 2655
Fax: +44 (0) 114 281 2951
E-mail:
info@jennic.com
www.jennic.com
Jennic
© Jennic 2009 JN-DS-JN5148-001 1v2 97
Preliminary
 Loading...
Loading...