


百年品质,值得信赖 —— 您的产品名称
5 axis Montion Controller System
NCH02
Manual

M
Manual of NCH02
请在这里输入您的公司名称或产品名称
Manual of NV8727T4V4
Chapter 1. Introduction .................................................................................................................................. - 1 -
1.1 Product Introduction .............................................................................................................................. - 1 -
1.2 Products specification ............................................................................................................................ - 1 -
1.3 Products Appearance and size ................................................................................................................ - 2 -
1.4 substantival explanation ......................................................................................................................... - 4 -
1.5 Noting and Waring ................................................................................................................................. - 5 -
Chapter 2. Connection ................................................................................................................................... - 6 -
2.1 Device Power supply Solution ............................................................................................................... - 6 -
2.2 Hand control NCH02 KEYBOARD's Definition .................................................................................. - 7 -
2.3 Port Definition and connection .............................................................................................................. - 9 -
Chapter 3. Software & Config ..................................................................................................................... - 18 -
3.1 Main Page ............................................................................................................................................ - 18 -
3.2 FILE Page ............................................................................................................................................ - 23 -
3.3 CONFIG Page ...................................................................................................................................... - 24 -
3.4 Test and diagnosis page ........................................................................................................................ - 33 -
Chapter 4. Operation and Application ......................................................................................................... - 36 -
4.1 Establish machine coordinate system .................................................................................................. - 36 -
4.2 Probe .................................................................................................................................................... - 39 -
4.3 Workpiece zero point ........................................................................................................................... - 44 -
4.4 Load and run G code ............................................................................................................................ - 45 -
Chapter 5. G & M instructions supported .................................................................................................... - 47 -
5.1 G instruction Supported ....................................................................................................................... - 47 -
5.2 M instruction Supported ...................................................................................................................... - 48 -
Chapter 6. Question & Answer .................................................................................................................... - 50 -
6.1 Q&A for Hardware .............................................................................................................................. - 50 -
6.2 Q&A for Software ................................................................................................................................ - 50 -
Chapter 7. Contract us ................................................................................................................................. - 51 -
Contects

Chapter1 Introduction
Manual of NCH02
Chapter 1. Introduction
1.1 Product Introduction
Novusun CNC has engaged in the Numerical control industry for 7 years, specialized in
the research, development and production of various CNC controller systems with high quality
and high reliability. We produce the Brushless DC motor, Stepper motor driver, and also 1 to 6
axis CNC motion controllers.。
NCH02 is the 5 axis motion controller we spend 2 years to design.
NCH02 is a CNC system without computer. Only need a U-disk within G-CODE file,
NCH02 can read the G file and run the G file.
This manual introduces operation, connection and usage schedule of our professional
motion controller for engraving machine. Through a lot of the drawing the users can learn
quickly how to use this motion controller.
1.2 Products specification
Read G-CODE from U-DISK;
Operation without computer;
8 ports photoelectric isolated input interface;
5 ports photoelectric isolated output interface;
1 port 0-10V spindle speed analog output interface(can change to PWM output);
can support 5 axis stepper systems,125KHz pulse output for every axis;
ARM motion control chip;
main device is 24VDC power supply input, current should higher than 1A;
- 1 -

Chapter1 Introduction
Manual of NCH02
Support standard MPG and NVMPG;
3.5'' TFT screen;
19 user key;
1.3 Products Appearance and size
The Hand control system NCH02 appearance as the Figure 1-1 show: The host system
NCD02 appearance as the Figure1-2.
The Hand control system NCH02 overall size is 168mm*108mm*30mm;
The host system NCD02 overall size is 100mm*70mm*23.5mm
Figure1-1. NCH02 front appearance and size
- 2 -

Chapter1 Introduction
Manual of NCH02
Figure1-2. The host system NCD02 appearance and size
Figure1-3. NCH02 with NCD02
- 3 -

Chapter1 Introduction
Manual of NCH02
1.4 substantival explanation
When operate the NCH02, where will be a lot of English abbreviation, now we list all of
them for your kindly references:
FRO: Feeding adjust: During the operating process, the F value already set, and need to
adjust the current feeding speed, then we can adjust FRO value to realize it.
SRO: Spindle speed adjust: During the operating process, the S value already set, and need
to adjust the current spindle speed, then we can adjust SRO value to realize it :
Current Speed S#=setting S*SRO.
SRJ: speed adjust manually
During the operating process,as the manual speed already set,and we need to adjust the
current speed,and impossible to fix the value during it is working,then we can revise the SRJ
value to realize it.
Current manual speed FS#=Setting manual speed*SRJ.
F:Feedingspeed,the unit is mm/min.For example F=200,means every minute feeding
2000mm.
S: Spindle Speed. Unit is rad/min.For example S=20000,means 20000 revolution/Minute.
X axis Coordinate
Y axis Coordinate
Z axis Coordinate
A axis Coordinate
B axis Coordinate
C axis Coordinate
Ready:ReadyMode.In the mode we can do any operation,include processing or values
- 4 -
Chapter1 Introduction
Manual of NCH02
modification or starting 2nd mode.
Reset: Reset mode.In this mode,it should stop every operation.
“Step”:Manual Step Mode. Every axis candonduct the manual step operation at this mode.
MPG: MPG mode.Every axis can conduct the MPG operation at this mode.
1.5 Noting and Waring
Free from exposure to the electronics without waterproof
function.Please environment as dry as possible. This is the icon.
Wiring warning, the IO input term inal of this equipment support the
equipment with source switch (such as Inductive proximity switch.)When using
such kind of switch, attention please: avoid the +terminal and –terminal of
power supply to connect with GND.This equipment’s analogy quantity
output terminal of spindlecontrolalos have a certain load capacity. Please avoid
this terminal connect with GND.in case that the interior components and parts be
brokendown.
Operation warning, Please do the security measures well when
connecting with the machine tools.The ESTOP , limit and other things must be
perfected.When comes across the emergancy, please press the ESTOP key at once
or cut off the power directly, thus avoiding the equipment damage and casualty.
High voltage danger, the primary device is 18-32VDC power
supply.Voltage equipment.Pls pay attention to the electricity, safety when conducting
the operation
- 5 -
Chapter2 Connection
Manual of NCH02
Chapter 2. Connection
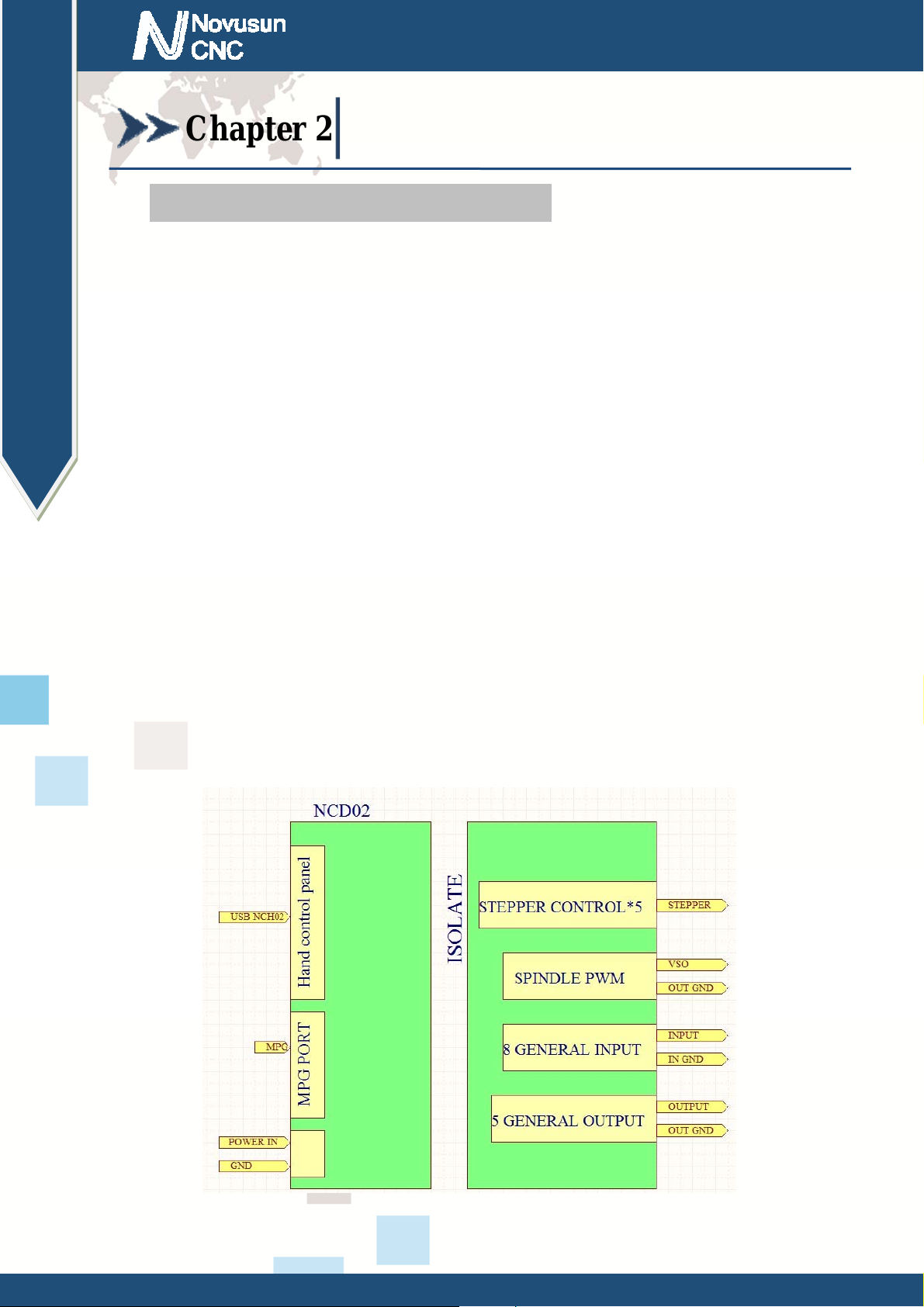
2.1 Device Power supply Solution
The power supply solution in the field of the Industrial automation is always very
complicated, there is a lot of the GND, now we descript the structure of the power supply as
below:
The power supply structure as the Figure 2-1,main power supply input and MPG module and
stepper control output module are common GND, Limited and Estop input module and Spindle
speed adjust module are common GND, between main power supply and output module there are
photoelectric isolation. The inputs of limited switch and Estop and so on are Common cathode,
inside of the device, there is GND as common-, no need to connect external power supply. Based
on the reference of output GND interface, output a 0-10V adjustable voltage to adjust the spindle
speed. The chassis is built with 220V to 48V DC supply to the DC brushless spindle and 4 step
motor driver.
Figure2-1. Power supply structure of NCD02
- 6 -
Chapter2 Connection
Manual of NCH02
2.2 Hand control NCH02 KEYBOARD's Definition
2.2.1 KEYBOARD's Definition
KEYBOARD's Definition see as Table 2-1
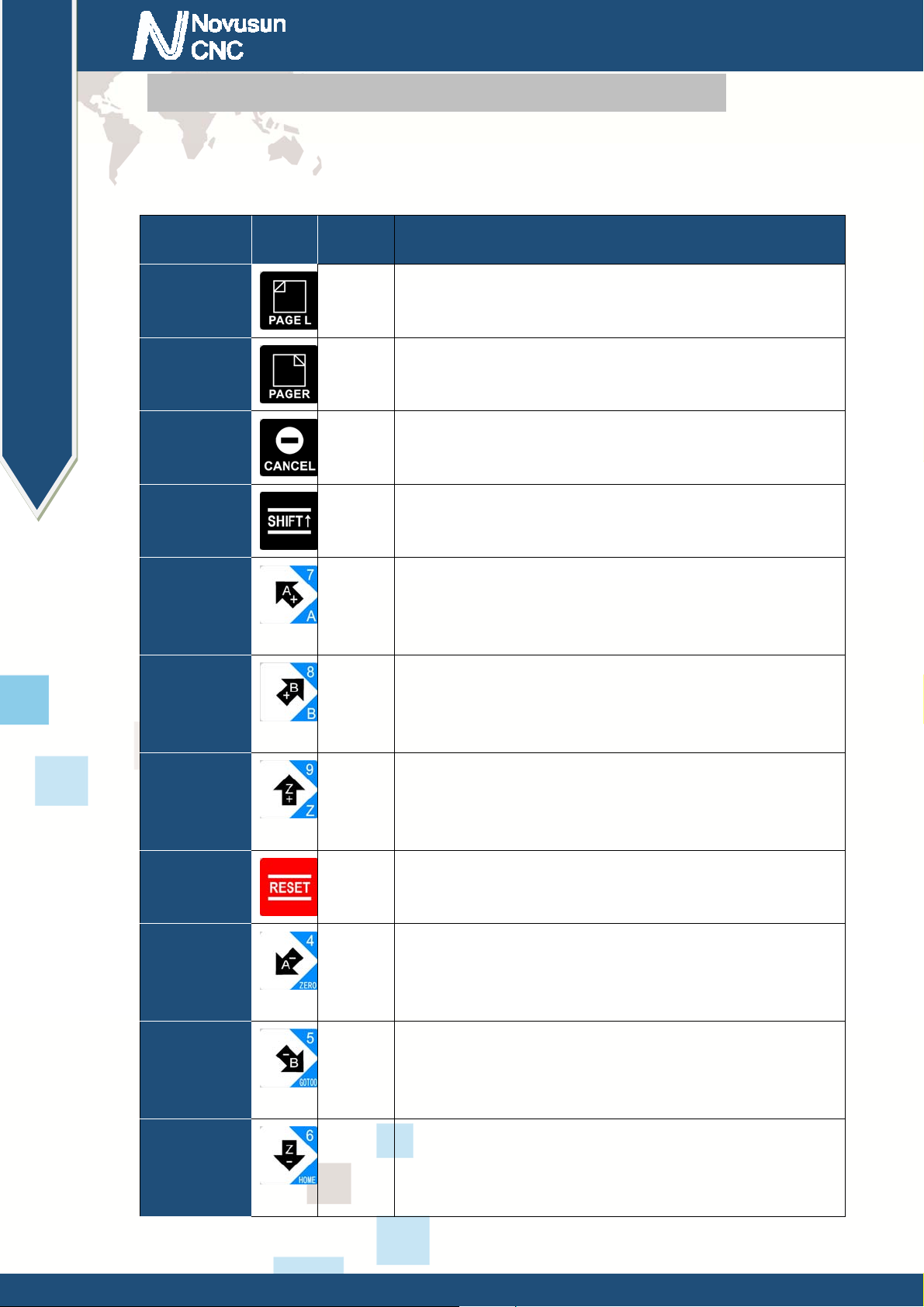
Location Icon Name Function
R 1 C 1 PAGE L 1:Page left
R 1 C 2
R 1 C 3 CANCEL 1:Cancel;2:Sign out
PAGE R 1:Page right
R 2 C 1
R 2 C 2 A+ 1:A axis manual forward;2:Select A axis;3:Number
R 2 C 3 B+ 1:B axis manual forward;2:Select B axis;3:Number
R 2 C 4 Z+ 1:Z axis manual forward;2:Select Z axis;3:Number
R 3 C 1 RESET 1:Reset state switch
R 3 C 2 A- 1:A axis manual reverse; 2:ZERO in Workpiece
SHIFT 1:Shift,Call second functions
7
8
9
coordinates;3:Number 4
R 3 C 3 B- 1:B axis manual reverse;2:Go to zero in workpiece
coordinates;3:Number 5
R 3 C 4 Z- 1:Z axis manual reverse;2:Find zero point Mechanical
coordinates;3:Number 6
- 7 -
Chapter2 Connection
Manual of NCH02
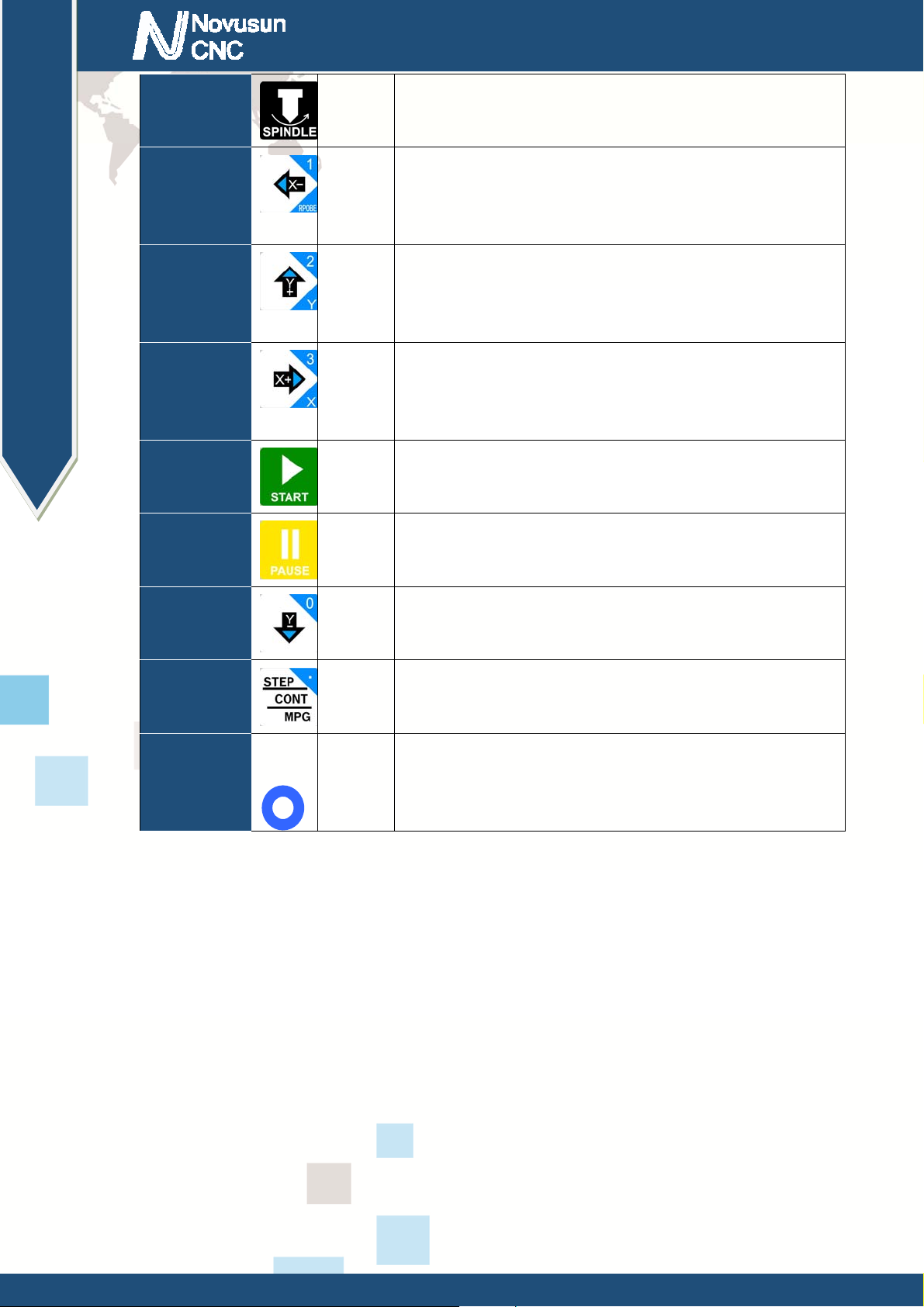
R 4 C 1
R 4 C 2
R 4 C 3 Y+ 1:Y axis manual forward;2:Select Y axis;3:Number
R 4 C 4 X+ 1:X axis manual forward;2:Select X axis;3:Number
R 5 C 1 START 1:Start the G code
SPINDLE
A- 1:A axis manual reverse;2:Probe;3:Number 1;4:
1:Start and Stop Spindle
Move left
2;4:Move up
3;4:Move left
R 5 C 2 PAUSE 1:Pause the G code
R 5 C 3
R 5 C 4 STEP 1:Switch step/ continuous/MPG ;2:Number “.”
R 1 C 4 PUSH
Y- 1:Y axis manual reverse;2:Number 0;3:Move down
PUSH 1:Increase the number clockwise;2:Decrease the
number Counter-clockwise;3:Confirm when push
Table 2-1. Keyboard definition
- 8 -
Chapter2 Connection
Manual of NCH02
2.3Port Definition and connection
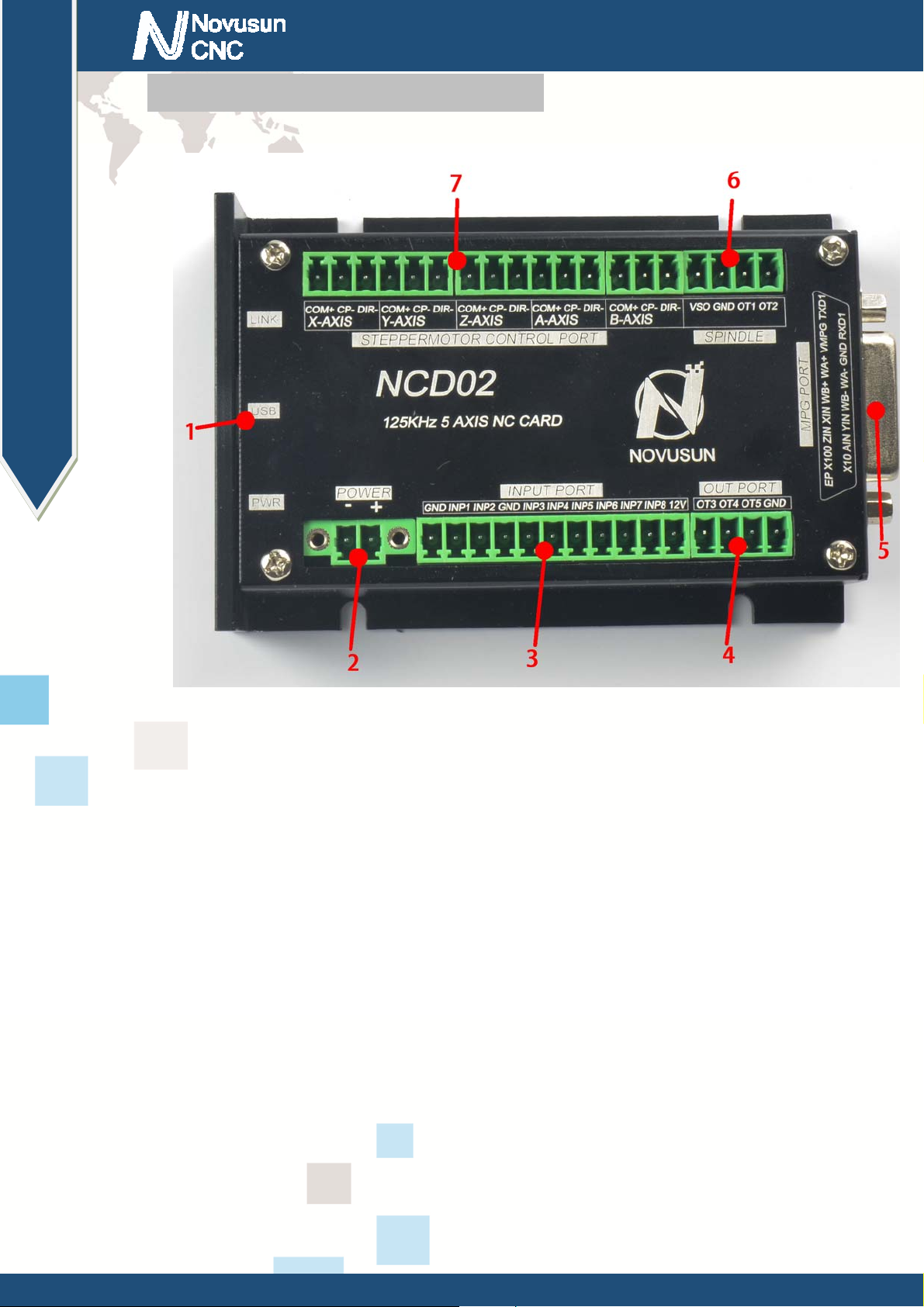
Figure2-2. Port of NCD02
As shown in Figure 2-2, the main controller indicates 1-7 are USB port, main power port,
general input port, general output port, MPG port, spindle port and stepper motor control port.
The detailed description of these functional modules and interfaces is described below.
2.3.1 USB port
As Figure 2-2 showed,No.1 terminal block is USB port, you can connect with NCH02
through this interface.
2.3.2 Main power supply port
As the Figure 2-2 show, The marked No. 2 port is power supply port. The access voltage
range is 24VDC, and the power is not less than 20W. The positive and negative connection of the
power supply see as the silk printing, See as Figure 2-2, left is GND, and right is "+".
2.3.3 Limit/Home input port
- 9 -
Chapter2 Connection
Manual of NCH02
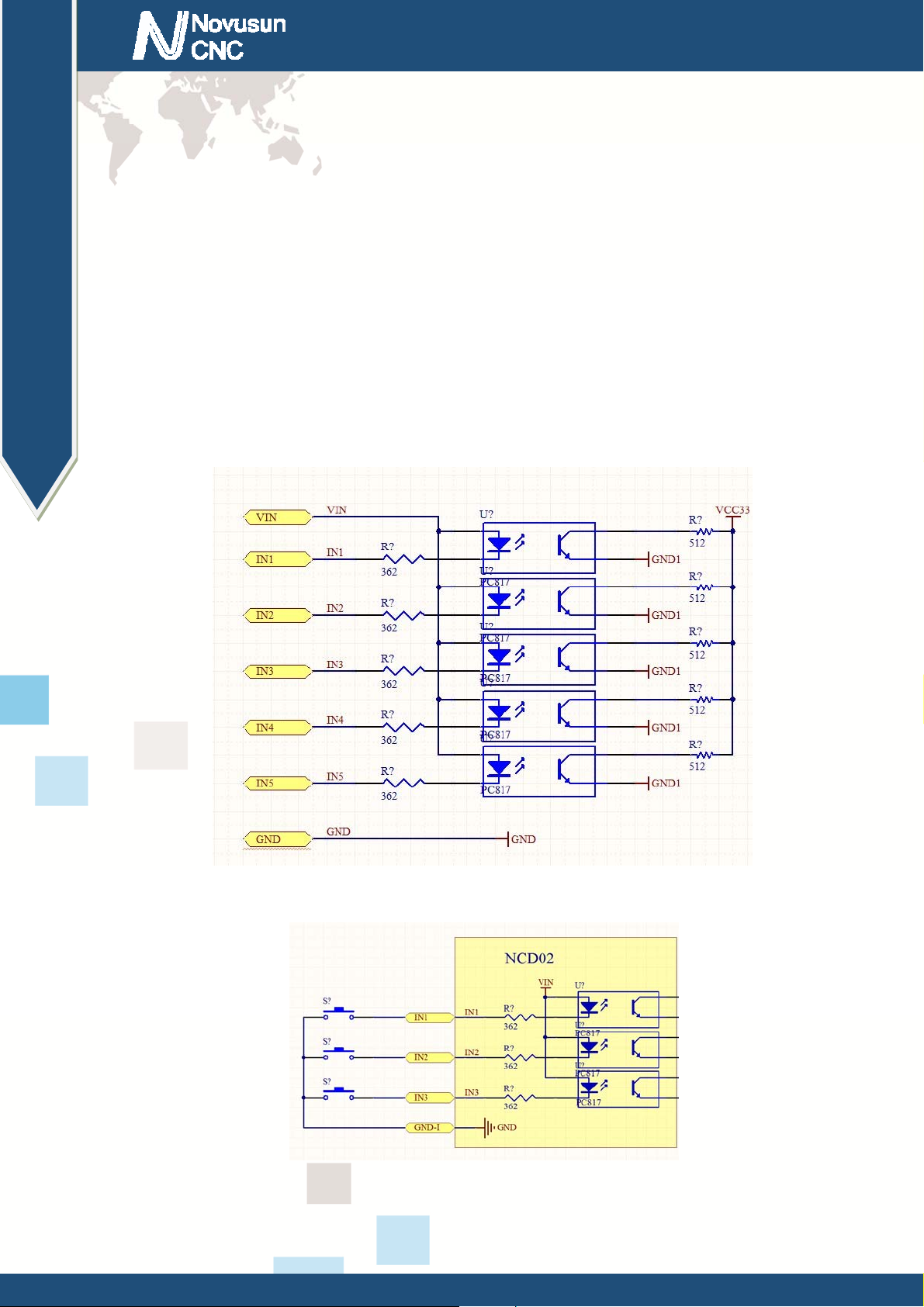
As the Figure 2-2 showed, Marked No. 3 position is the limited /home input port. they are
the optical isolated Input interface. The input interface is a 11P 3.81 direct insertion terminal
interface, as shown in Figure 2-2 shell silk print, and definition is
GND/INP1/INP2/GND/INP3/INP4/INP5/INP6/INP7/INP8/12V from left to right. Internal
structure reference figure 2-3. The interface is a common negative interface, which can be
connected with a micro switch, a 2 line proximity switch or a NPN type 3 line proximity switch.
The interface is isolated by the optocoupler, and the internal structure diagram is referred to
figure 2-4. Estop, micro switch, 2 line proximity switch connection method reference figure 2-5.
Figure2-3. Internal structure diagram of the input port
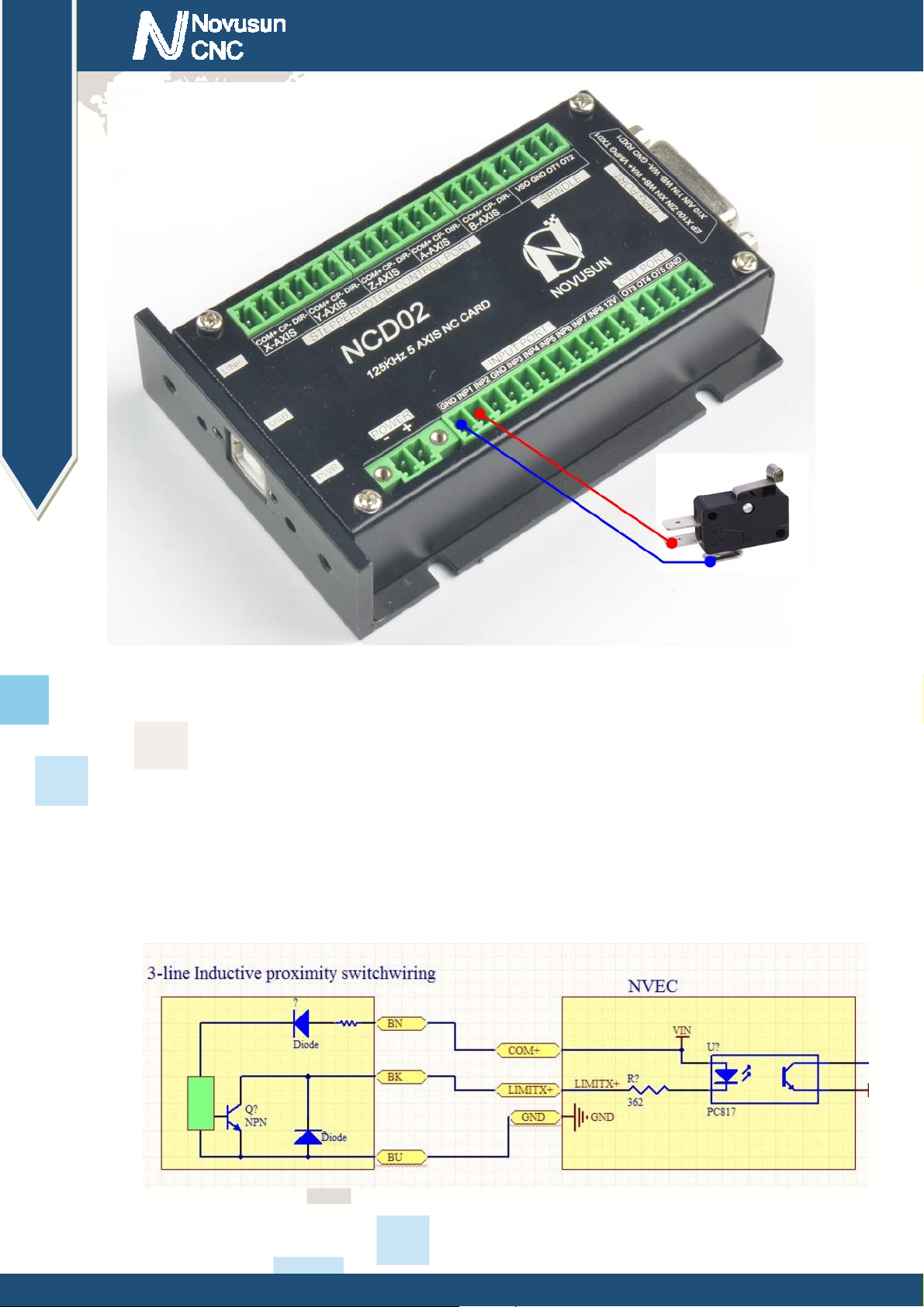
Figure2-4. Probe/Estop/ ordinary fretting switch input connection
- 10 -
Chapter2 Connection
Manual of NCH02
Figure2-5. input interface serial number IN3 and 2 line proximity switch / common switch limit input
wiring diagram
3 lines Proximity Switch connection Figure 2-13,brown cable for Proximity switch connect
with 12V,Black cable connect channel, blue cable connect with GND1.
Only support NPN 3lines proximity switch.
Figure2-6. NPN 3 lines Proximity Switch connection drawing
- 11 -

Chapter2 Connection
Manual of NCH02
Figure2-7. NPN 3 line Proximity switch wiring
2.3.4 Output port
As Figure 2-2 showed,No.4 switch is Output port, The interface is an open-ground
interface. The internal structure refers to figure 2-8, which can be absorbed not more than 50mA
current.
- 12 -
Chapter2 Connection
Manual of NCH02
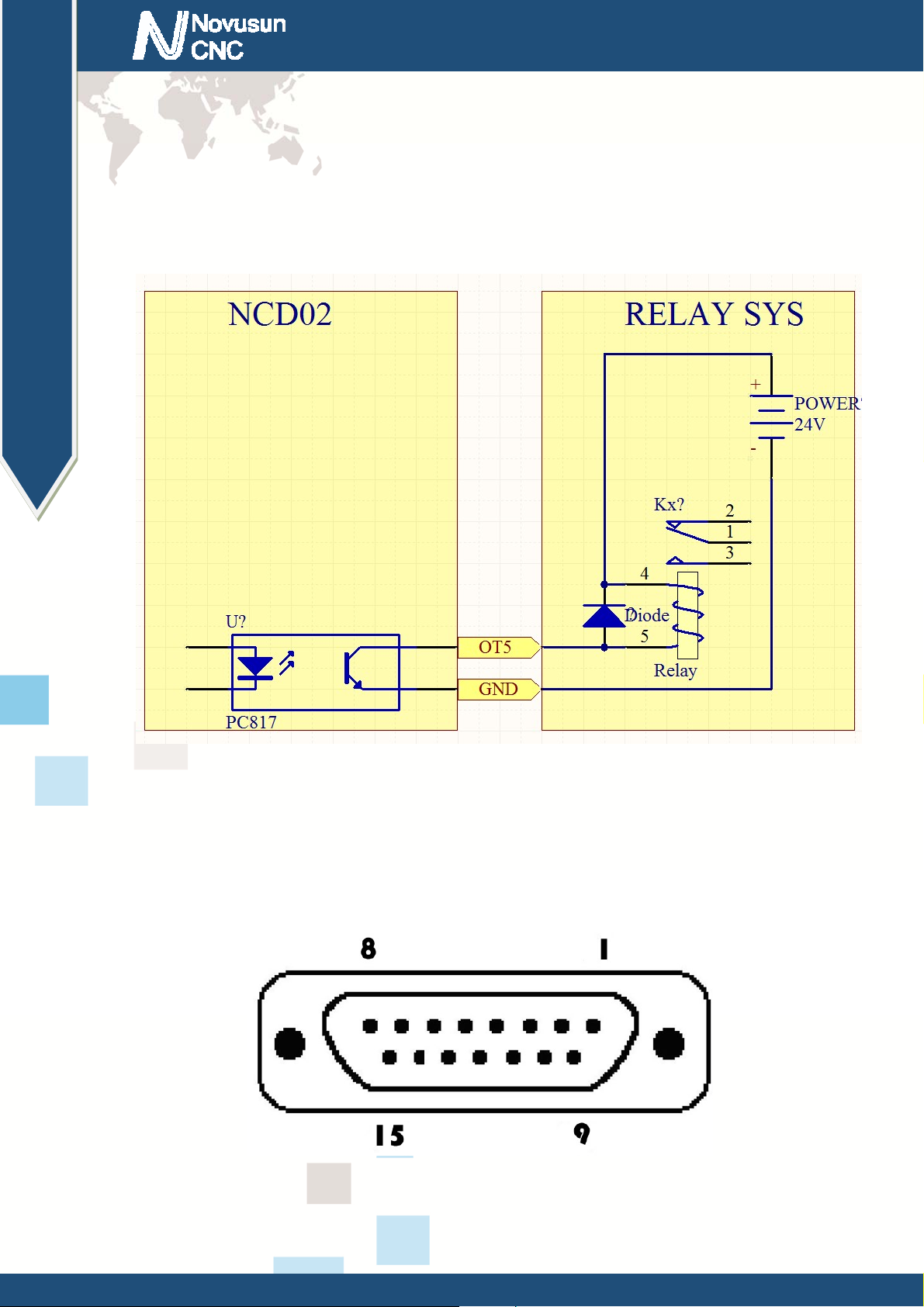
Figure2-8. the internal structure of the general output interface
The relay with a absorption current of no more than 50mA can be driven directly. If it's
more than 50mA, and it is recommended to use a current amplification current, such as the use of
a ULN2803 chip. Reference figure 2-9 for external power relay method.
Figure2-9. general output interface connect with a small power relay
2.3.5 MPG port
As the Figure 2-2 showed, the marked No.5 position interface is MPG port . The pin order
see as Figure 2-10.
Figure2-10. MPG Port Pin order
- 13 -
Chapter2 Connection
Manual of NCH02
This card connect with MPG by this port. The port definition see as table 2-2
No. Mark Definition
1 T1OUT TXD of Serial port
2 VMPG Power supply + for MPG(5V)
3 WHA+ A phase positive of the encoder
4 WHB+ B phase negative of the encoder
5 XIN X axis select input
6 ZIN Z axis select input
7 X100IN 100 rate select input
8 EP Estop port
9 R1IN RXD of Serial port
10 GND Ground and common end
11 WHA- A phase positive of the encoder
12 WHB- B phase negative of the encoder
13 YIN Y axis select input
14 AIN A axis select input
15 X10IN 10 rate select input
Table 2-2. MPG port definition
2.3.6 Spindle port
As Figure 2-2 showed,No.6 port is Spindle port. The interface definition is
VSO/GND/OT1/OT2 from left to right. Where VSO is the 0-10V analog output, OT1/OT2
digital drive signal output, spindle control output interface and spindle inverter connection
diagram figure 2-11. VSO/GND/OT1/OT2 are respectively connected with the inverter
AIN1/COM/X1/X2, where AIN1 is the input speed signal, COM converter X1 and X2 are the
- 14 -

Chapter2 Connection
Manual of NCH02
common end configured to forward and reverse.
Figure2-11. spindle port definition and connection
2.3.7 Stepper motor port
As Figure 2-2 showed,No.7 port is stepper motor port, which is define as X/Y/Z/A/B. Each
axis is define as COM+/CP-/DIR-. They are Common/Pulse-/Direction-. The connection method
with the stepper motor driver see as Figure 2-12.
- 15 -

Chapter2 Connection
Manual of NCH02
Figure2-12. NCD02 Connect with stepper motor driver
The above detailed description of the NCD02 module definition and connection mode,
NCD02's integrated wiring diagram reference figure 2-13.
- 16 -

Chapter2 Connection
Manual of NCH02
Figure2-13.
NCD02 and NCH02 integrated wiring diagram
- 17 -

Chapter3 Software & config
Chapter 3. Software & Config
The NCH02 software interface is divided into 4 pages, including main page, file
management page, configuration page, test and diagnosis page. Now, the interface elements and
basic operations on 4 pages are described below.
3.1 Main Page
The main page is divided into 20 regions, such as Figure 3-1, and the following 20 regions
Manual of NCH02
are described in detail.
Figure3-1. Main Page of NCH02
1. Manual mode bar
The status bar mainly displays the manual mode. There are three manual modes. They are
manual continuous mode (shown as CONT), step mode (shown as STEP) andMPG mode (shown
- 18 -

Chapter3 Software & config
as MPG). Under the ready state of system, push 3 modes can be switched.
2. Running status bar
The status bar mainly displays the working state of the system. There are four systems in it.
They are reset state (shown as RESET), ready state (shown as READY), manual control state
(shown as JOG) and running state (shown as RUN). In reset state, all operations are invalid, it's
the system protection state; the ready state is ready for work. Any operation can be performed in
Manual of NCH02
the state of preparation; By pressing
state (READY) and the reset state (RESET). In the ready state, when the G code is ready, the G
code can be started by pressing , or the start line of the G code can be specified by
pressing + . In the process of running G code, the running status bar displays the
RUN, indicating that the G code is running. During the operation of hand control operation, the
running status bar shows JOG, indicating that hand control is working.
3. File status bar
The status bar displays the file loading G code or U disk information, It displays "No file
loaded" in the file without loading condition; it displays "U-Disk Detected" when the U disk
, the system can be switched between the ready
insert and correct recognition; "U-Disk Removed" display in the U disk pulled out; it display G
code file name when loaded the correct G code;
4, time display bar
The time display bar mainly displays the current G code running time.
- 19 -

Chapter3 Software & config
The adjustable parameters are described below, and all the adjustable
parameters can be selected by the knob Clockwise rotation or a reversal.
Under normal conditions, the adjustable parameters are white background black
words.
When turning the knob, you can see the valid position is changed with the knob,
a parameter change to blue background and white word when it become a valid
parameter.
When a parameter - we need to modify the value when it is selected. we need to
Manual of NCH02
click the PUSH (button of the knob), then the parameters become black background
and white word, meaning it's in editing, we can modify the parameters according to
the number keys.
After the modification, then press the PUSH, then it exit the edit state and enter
the unselected state, then the parameter displays the adjusted value.
5, FRO parameter setting
FRO is a feed rate adjustment that can be adjusted through the knob, adjusting the range
from 0~200%, and the actual feed speed #F=FRO*F (F is feed speed set value).
6, SRO parameter setting
SRO is the spindle rate adjustment, can be adjusted through the knob, the adjustment range
from 0~200%, the actual spindle speed #S=SRO*S (S is the spindle speed set value).
7, SJR parameter setting
SJR is a manual speed rate adjustment that can be adjusted through the knob, adjusting the
range from 0~100%, the actual manual speed #HF=SJR*HF (HF is the manual speed set value).
8,Step manual mode single step parameter setting
- 20 -

Chapter3 Software & config
The single step parameters can be set into 3 gears, which are 1mm, 0.1mm and 0.01mm,
which can be adjusted by the knob.
9, F parameter setting
This parameter defaults to the minimum speed of each axis in the parameter configuration
item, and can be adjusted by the knob. If there is no F instruction in the G code, the G code is
running in this speed. If there is F instruction in the G code, the feed speed is updated according
to the F instruction.
10, F real-time display
Manual of NCH02
F real-time display values show the real-time speed of F during the running of G code.
Real time feed speed #F=FRO*F (set feed speed).
11, S parameter setting
This parameter defaults to the default spindle speed in the parameter configuration item,
which can be adjusted by the knob. If there is no S instruction in the G code, the G code is
running at this speed. If there is S instruction in the G code, then the spindle speed value is
updated according to the S instruction.
12, S real-time display
S real-time display values show the real-time speed of S during the running of G code.
Real time spindle speed #S=SRO*S (set the spindle speed).
13, M10/M11 state display
The state value of the M10/M11 switch is displayed, which can be manually modified by
the knob or automatically modified according to the M10/M11 instruction in the running G file.
14, M8/M9 state display
The state value of the M8/M9 switch is displayed, which can be manually modified by the
knob or automatically modified according to the M8/M9 instruction in the running G file.
- 21 -

Chapter3 Software & config
15, M3/M4/M5 state display
The state value of the M3/M4/M5 switch is displayed, which can be manually modified by
the knob or automatically modified according to the M3/M4/M5 instruction in the running G file.
16, G coordinate system display
The current coordinate system is displayed, with a modified range of G54~G59, which can
be manually modified by the knob or automatically modified according to the G54~G59
instruction in the running G file.
17. System status bar
Manual of NCH02
The status bar of the system is mainly prompted by the common system state, and the list
of States is as follows
NO. Display Definition
1 SYSTEM REDAY
2 SYSTEM RESET
3 SYSTEM IS RUNNING
4 X++ LIMITED
5 X-- LIMITED
The system is ready to execute the G code
System reset state, no operation can be done
G code is running
Positive limit of X axis is triggered. Same as
other axis
Negative limit of X axis is triggered. Same as
other axis
6 X++ SOFT LIMITED
7 X-- SOFT LIMITED
Table 3-1. system status prompt information and definition
Positive soft limit of X axis is triggered. Same
as other axis
Negative soft limit of X axis is triggered. Same
as other axis
- 22 -

Chapter3 Software & config
18. The running G code display bar
In the process of running the G code, the current line number and the current line G code
are displayed.
19. Coordinate values of each axis
The coordinate value of the workpiece is displayed here.
20. The mechanical coordinates of each axis
The mechanical coordinates of each axis are displayed here, and the mechanical
coordinates of each axis are displayed behind the coordinate values of the workpiece, and the
Manual of NCH02
font is smaller than the coordinate value of the workpiece.
3.2 FILE Page
The file management page can be entered by pressing under the main control page.
The file management page is shown in Figure 3-2.
Figure3-2. File management page
- 23 -

Chapter3 Software & config
The file management page displays all the files in the U disk and can display the file name,
the size of the file, and the last modification date.
In the file management page, you can select the G code file you want to run by the knob.
When selected, press the knob confirmation key (PUSH) to load the G code file. After the load is
finished, the system automatically switches to the main page.
3.3 CONFIG Page
In the file management page, press to enter the parameter configuration page.
Manual of NCH02
Press to switch the sub page of the configuration page. The parameter configuration
page contains 4 sub pages, respectively is the motor parameter configuration (MOTOR), input
configuration (INPUT), and the output spindle configuration (Spindle/OUT) and other(OTHER).
3.3.1 motor parameter configuration (MOTOR)
The motor parameter configuration page is shown in Figure 3-3. This page list specific
parameters by row, and list number axis by column. The parameters of the axis can be adjusted
by the knob.
- 24 -

Chapter3 Software & config
Manual of NCH02
Figure3-3. motor parameter configuration page
The parameter item specifically defines show in table 3-2.
No. Mark Definition Range
1 Stepsper
2 Velocity
3 Accel
the number of pulses required for every
forward 1mm
Speed: the manual or the axis G code runs
maximum speed. The unit is mm/min
Acceleration: the manual or the axis G code
runs the maximum acceleration. The unit is
100-20000
50-20000
10-5000
mm/min2
4 Reserved
5 Step level
System reserved, undefined
The pulse level, 0 indicates that the output
level is 0V when no pulse, and the 1 indicates
- 25 -
1/0

Chapter3 Software & config
Manual of NCH02
that the output level is maximum when no
pulse.
6 Dir Level
7 BL Enable
8 BL Length
3.3.2 Input parameter configuration (INPUT)
The direction level is 0. When the axis goes to
the coordinate + movement, the direction
signal output level 0V, 1 indicates that the
direction signal output level is the maximum
when the axis moves towards the coordinate +
movement.
Backlash Enable, 1: enable; 0: disable
Backlash Length, The unit is mm
Table 3-2. motor parameter configuration
1/0
1/0
0-10
The input parameter configuration page is shown in Figure 3-4. This page list specific
parameters by row, and list number axis by column. The parameters of the axis can be adjusted
by the knob.
- 26 -

Chapter3 Software & config
Manual of NCH02
Figure3-4. Input configuration page (INPUT)
The parameter specifically defines see as table 3-3
No. Mark Definition Range
1 Limit++
2 L++ Level
The forward hard limit input level definition,
1 is the input high level effective; 0 is the
The forward hard limit pin setting, 0
indicates close the limit, and 1-8 indicates
that the limit pin is configured on the
IN1-IN8 specific input port interface.
0-8
1/0
input low level effective.
3 Limit--
The backward hard limit pin setting, 0
indicates close the limit, and 1-8 indicates that
the limit pin is configured on the IN1-IN8
- 27 -
0-8

Chapter3 Software & config
Manual of NCH02
specific input port interface.
4 L-- Level
5 Home
6 Home Level
The backward hard limit input level
definition, 1 is the input high level effective; 0
is the input low level effective.
The home pin setting, 0 indicates close the
home, and 1-8 indicates that the limit pin is
configured on the IN1-IN8 specific input port
interface.
The home input level definition, 1 is the input
high level effective; 0 is the input low level
effective.
1/0
0-8
1/0
7 Home Dir
8 HKB length
3.3.3 Spindle / output parameter configuration (Spindle/OUT)
The spindle / output parameter configuration page is shown in Figure 3-5. This page for a
list of specific parameters to the parameter list, the list number axis. The parameters of the axis
can be adjusted by the knob.
The home's direction , 1 indicates home's
direction is +, and 0 indicates the home's
direction is -.
The return distance after the home operation
is completed.
Table 3-3. input parameter configuration
1/0
0-100
- 28 -

Chapter3 Software & config
Manual of NCH02
Figure3-5. Spindle / output parameter configuration (Spindle/OUT)
Spindle parameters specific definition reference table 3-4.
No. Mark Definition Range
1 Max Speed
2 Default Speed
3 M3/4 Delay
Table 3-4. Spindle parameter configuration
NCD02's spindle speed regulation output is 0-10V voltage, output voltage and maximum
spindle speed and default spindle speed (current speed) are related, the specific formula is:
The max spindle speed
The default spindle speed
Delay time of M3/4 instruction
100-40000
0-40000
0-8
output voltage (VSO) =10*default spindle speed (current speed F) / maximum spindle speed (F
max). For example, the current speed is F=20000, the maximum spindle speed F max=40000,
at this time, the spindle output voltage is VSO=10*20000/40000=5V.
The M3/4 delay time is the time between running the G code in the M3/4 time to the
actual execution of the IO output.
- 29 -

Chapter3 Software & config
The output item parameters reference table 3-4
No. Mark PIN Active Level
Definition Range Definition Range
Manual of NCH02
4 Spindle CW(M3)
5 Spindle CCW(M4)
6 Mist cool(M8)
7 Flood cool(M10)
8 EXT M60
9 EXT M61
10 EXT M62
11 EXT M63
12 EXT M64
Table 3-5. OUT parameter configuration
M3 pin number 0-5 M3 effective level 1/0
M4 pin number 0-5 M4 effective level 1/0
M8 pin number 0-5 M8 effective level 1/0
M10 pin number 0-5 M10 effective level 1/0
M60 pin number 0-5 M60 effective level 1/0
M61 pin number 0-5 M61 effective level 1/0
M62 pin number 0-5 M62 effective level 1/0
M63 pin number 0-5 M63 effective level 1/0
M64 pin number 0-5 M64 effective level 1/0
Note: the output pin number is 0 indicates to close the current output, and the
output pin number 1-5 indicates the corresponding OUT1-OUT5.
Output power level setting 1: execution of current M instruction to indicate output
disconnecting with GND.
Output effective level setting 0: execution of current M instruction to indicate
output connecting with GND.
3.3.4 other parameter configuration (OTHER)
The other parameter configuration pages are shown in Figure 3-6. The parameter page
mainly includes the parameters of the soft limit of each axis, the language, the speed of HOME,
the speed of BACKLASH, the speed of the probe and the coordinates of the position of the
- 30 -

Chapter3 Software & config
tools sensor. The parameters of the axis can be adjusted by the knob. Page reference figure 3-6,
page soft limit parameters specify reference table 3-6. Probe related item parameters reference
table 3-7. other miscellaneous parameters reference 3-8.
Manual of NCH02
Figure3-6. other parameter configuration (OTHER)
No. Mark Definition Range
1 Limit++_Ena
2 Limit++_Value
3 Limit--_Ena
4 Limit--_Value
Enable of positive soft limit,1:enable,0:disable
Positive soft limit position limit value, in
mechanical coordinate system as reference
Enable of negative soft limit,1:enable,0:disable
Negative soft limit position limit value, in
mechanical coordinate system as reference
1/0
0-10000
1/0
0-10000
Table 3-6. Configuration of soft limit
Note the soft limit configuration item XYZAB 5 axis can be set independently.
- 31 -

Chapter3 Software & config
No. Mark Definition Range
Manual of NCH02
5 PROBE-PIN
6 PROBE-LEVEL
7 PROBE-MOD
8 P-X
9 P-Y
The pin of Probe, 0 for closing, and 1-8 for the
corresponding input pin IN1-IN8
Effective level of Probe, 1: high efficiency, 0: low
efficiency
Probe mode, 0:fixed-position probe,
1:floating-position probe
X axis coordinate of Tool sensor in fixed-position
mode
Y axis coordinate of Tool sensor in fixed-position
mode
0-8
1/0
1/0
±10000
±10000
10 P-Z
11 PROBE SPD
No. Mark Definition Range
12 Language
13 Home Spd
14 BL Speed
Z axis coordinate of Tool sensor in fixed-position
mode
Probe speed ratio according to G0
Table 3-7. Configuration of Probe
Language settings (temporary support for
English only)
Home speed ratio according to G0
Backlash speed ratio according to G0
±10000
0-100%
0
0-100%
0-100%
15 Buzzer
Button buzzer switch, 0: close, 1: open
- 32 -
1/0

Chapter3 Software & config
Manual of NCH02
16 ESTOP PIN
17 ESTOP LEVEL
18 P-B-Z
The pin of Estop, 0 for closing, and 1-8 for the
corresponding input pin IN1-IN8
Effective level of Estop, 1: high efficiency, 0:
low efficiency
Back distance of Z axis after Probe in
floating-position mode
Table 3-8. Other parameter setting
3.4 Test and diagnosis page
0-8
1/0
0-100
The test and diagnosis page can be entered by pressing under the parameter
configuration page. The page mainly displays the basic function test information of the system,
including key monitoring, input and output monitoring, spindle monitoring and so on. Page
reference diagram 3-7. detailed description of reference table 3-9.
- 33 -

Chapter3 Software & config
Manual of NCH02
Figure3-7. Test and diagnosis page (TEST)
No. Mark Definition
1 Axis TEST1
2 Axis TEST2
3 SPINDLE TEST
X/Y/Z 3 axis test, adjust the knob to select the function, after the
confirmation (PUSH) to start the test, the X/Y/Z axis is run
according to the design path.
A/B 2 axis test, adjust the knob to select the function, after the
confirmation (PUSH) to start the test, the A/B axis is run
according to the design path.
Spindle test, adjust the knob to select the function. According to
the confirmation (PUSH), after starting the test, the spindle
output is changed according to the design voltage, Voltage is the
output voltage display, and Speed is the spindle speed display.
4 INPUT TEST
The input IO value is displayed in real time. One IO corresponds
- 34 -

Chapter3 Software & config
Manual of NCH02
to a color block, the valid color block becomes red, and the
invalid color is blackened.
5 OUTPUT TEST
6 TEST ALL
7 KEYBOARD
Table 3-9. Description of test and diagnosis page
The output IO value is displayed in real time. One IO
corresponds to a color block, the output block becomes red, and
the invalid color is blackened.
The function is selected by the adjustment knob. After the test is
started (PUSH), all modules are running or changing according
to the design.
Button monitoring can monitor the press position in real time.
- 35 -

Chapter4
Chapter 4. Operation and Application
Operation and Application
The basic operation is introduced in the front part of the keystroke. Here is not going to be
exhausted. Here we introduce the use of this product from the perspective of an initial user. The
first time we start the product, we first configure all the configuration items according to our actual
needs. Here we introduce the usage method, no longer describe the configuration items, and all the
configuration items are configured according to the customers' needs.
First of all, the system is started, our first step is to establish the m achine coordinate system ;
Manual of NCH02
the second step is probe, accurate zero; third step up the workpiece, the tip will move to zero
workpiece, and the workpiece coordinate reset; the fourth step is to load the G file; the above work
is finished, press START to start G code execution. The following sections describe these steps in
detail.
4.1 Establish machine coordinate system
As shown in Figure 4-1, the engraving machine schematic diagram is installed. Each axis is
equipped with a proximity switch. The limit and home share this switch. The X axis switch is
installed in the X-- position. The Y axis switch is installed in the Y++ position; the Z axis switch is
installed in the Z++ position. (here we test the prototype as a reference for installation, the actual
application of the customer can be selected according to the needs of the installation).
- 36 -

Chapter4
Operation and Application
Manual of NCH02
Figure4-1.
For the first time to use the system, we need to establish machine tool coordinate system,
that is, HOME.
After starting the system, we switch to the parameter settings page, "INPUT" sub-page, and
HOME configuration, according to our actual engraving machine configuration, as shown in
Figure 4-2. XYZ's HOME PIN is set to 3,4,5, LEVEL is set to 0, DIR X axis is set to 0, YZ
axis are set to 1. HBlength are all set to 10.
The switch position diagram of the test engraving machine
- 37 -

Chapter4
Operation and Application
Manual of NCH02
Figure4-2.
Switch to the parameter settings page "OTHER" subpage, find "Home Spd", and modify
the HOME speed to the appropriate value, as shown in Figure 4-3.
INPUT settings page
Figure4-3. Home speed settings
Single axis home operation: after setting, switch to the main page of "MAIN", we take X
as an example for single axis home, pressed + + , this is the X axis of
- 38 -

Chapter4
single axis home operation, the axis will run toward X-, stop until the trigger X axis HOME
switch, then switch back until the HOME switch change to the off state, the X axis machine
Operation and Application
coordinate is automatically cleared, said here is the X axis mechanical zero point; then continue
to run 10mm X+ to stop (we set HOME back distance is 10 in the configuration), so X HOME
operation is complete.
The all axis mechanical zero operation: NCH02 supports all axis HOME operation on
the main page, press
this, to ensure to all axis HOME open in INPUT setting, if one axis HOME is close, jump to
Manual of NCH02
+ + to trigger all axis HOME operation, before
the next axis operation. The order of HOME operation in full axis is X, Y, A and Z.
4.2 Probe
The Probe can be configured as a fixed-point probe or a floating-point probe. Below we
describe 2 kinds of probe operation in detail.
4.2.1 Fixed-point probe
Fixed point probe is to fix the tool sensor in a fixed position of the engraving machine, and
every time the probe is processed, the spindle tip automatically moves to this fixed position for
tool setting. The installation position of the tool sensor is shown in reference Figure 4-4.
- 39 -

Chapter4
Operation and Application
Manual of NCH02
Figure4-4. Tool sensor installation position in fixed-point probe mode
Figure4-5. Move to the installation position of the tool sensor
First, we manually move the tool tip to the center of the plane on the tool block, and r ead
- 40 -

Chapter4
the XYZ axis mechanical coordinates. As shown in Figure 4-5, the plane center coordinates (X, Y,
Z) on the tool block are (30,30, -110).
Operation and Application
Secondly, we enter the OTHER sub page under CONFIG. As shown in Figure 4-6, we find
fixed-point tool block location configuration item, and configure related parameters of cutter
block as shown in table 4-1.
No. Mark Value Definition
1 PROBE-PIN 2
2 PROBE-LEVEL 0
Manual of NCH02
Take IN2 Port as probe input port
The input port IN2 is low effective (effective when
the input short with GND)
3 PROBE-MOD 0
4 PROBE-P-X 30
5 PROBE-P-Y 30
6 PROBE-P-Z -110
Table 4-1 Probe configuration item in fixed point probe mode
Probe configuration item screenshot see as figure 4-6.
Set to fixed-point probe mode
The X coordinate value of the position of the tool
sensor is 30
The Y coordinate value of the position of the tool
sensor is 30
The Z coordinate value of the position of the tool
sensor is -110
- 41 -

Chapter4
Operation and Application
Manual of NCH02
Figure4-6.
After the configuration is completed, we enter the main page and move the spindle to any
position. (we suggest that the Z axis of the tool tip is higher than the plane of the tool sensor). Press
+ , the system starts automatic probe. At this m oment, the system will automatically
move to the location of the set of tool sensor to automatically probe. After the probe is finished, the
system will automatically return to the just start position of the probe.
4.2.2 Floating-point probe
The floating probe means that the location of the tool sensor is not fixed at a certain
location, but is placed in any desired location. In this mode, we usually place the tool sensor on
Probe configuration
in fixed-point probe mode
the workpiece surface for floating-point probe. The position of the tool sensor is placed in
reference figure 4-8.
In the floating tool mode, there is no need to configure the position of the tool sensor. We
enter the OTHER subpage under CONFIG and set the probe related settings as shown in Ta ble
4-2. Floating-point probe configuration item screenshot reference figure 4-7.
- 42 -

Chapter4
No. Mark Value Definition
1 PROBE-PIN 2
Operation and Application
2 PROBE-LEVEL 0
3 PROBE-MOD 1
4 PROBE-B-Z 10
Manual of NCH02
Table4-2 Probe configuration item in fixed point probe mode
Take IN2 Port as probe input port
The input port IN2 is low effective (effective when
the input short with GND)
Set to floating-point probe mode
Back distance after probe
Figure4-7. Probe configuration in fixed-point probe mode
- 43 -

Chapter4
Operation and Application
Manual of NCH02
Figure4-8. Tool sensor installation position in floating-point probe mode
After completing the configuration we return to the main page, the tool sensor on the surface
of the workpiece, we only need to manually (MPG) move the spindle nose just above the tool
sensor, and then press + , the system will automatically start probe, after the
probe completion of the Z axis will be automatically lift off the tool sensor plane 10mm.
4.3 Workpiece zero point
After the probe is completed , the next step is confirm wor kpiece zero point, we want to
carve a product, first get the G code, to ensure the workpiece zero position of the G code file .
Some G code file set the workpiece center as the workpiece zero, some set a workpiece the
corner as the workpiece zero. Here is an example of a positive center on the surface of the
- 44 -

Chapter4
workpiece. Under the main page, use manual (MPG) to move the tip of the spindle to the center of
the workpiece surface and then presses + + to set axis coordinates to zero.
Operation and Application
Then move the Z axis out of the workpiece surface to the safety height. At this point, the workpiece
zero is confirmed.
4.4 Load and run G code
Under the main page, press to switch to file management page, adjust the knob to
select the files that need to be processed. As sh own in Figure 4-9, we selected the TEST2.TAP file.
Manual of NCH02
Figure4-9.
After selecting a the file, press the confirmation key to automatically load the G code and
automatically return it to the MAIN page. As shown in Figure 4-10, the title bar file display section
has already appeared TEST2.TAP, indicating that the G code file is loaded successfully.
select TEST2.TAP file in management page
- 45 -

Chapter4
Operation and Application
Manual of NCH02
Figure4-10. Estop and Probe dialog
When the G code is loaded, press. Start the process.
- 46 -

Chapter5 G & M instructions supported
Manual of NCH02
Chapter 5. G & M instructions supported
5.1 G instruction Supported
No. Instruction Definition
1 G0
2 G1
Quick positioning
Straightaway cut
3 G2
4 G3
5 G17
Cut along the circle
Cut inversing the circle
XY plane select
6 G18 ZX
7 G19
8 G28
9 G31
10 G54
11 G55
12 G56
YZ plane select
Home
Probe
G54 coordinate system
G55 coordinate system
G56 coordinate system
plane select
13 G57
14 G58
15 G59
16 G81
17 G82
G57 coordinate system
G58 coordinate system
G59 coordinate system
Drill hole code
Drill hole code
- 47 -

Chapter5 G & M instructions supported
18 G83
19 G90
20 G91
21 G98
22 G99
Manual of NCH02
Circulation Drill hole code
Absolute size mode
Increment size mode
Back to R point
Fixed circulation
Table 5-1 G instruction supported
5.2 M instruction Supported
No. Instruction Definition
1 M3
2 M4
3 M5
4 M8
5 M9
6 M10
7 M11
8 M30
9 M60
Spindle rotates forward
Spindle rotates backward
Spindle stop
Start of water -cooling
Stop of water- cooling
Start of Mist
Stop of Mist
End of G code
Open switch 1
10 M61
11 M62
12 M63
13 M64
14 M80
Open switch 2
Open switch 3
Open switch 4
Open switch 5
Close switch 1
- 48 -

Chapter5 G & M instructions supported
15 M81
16 M82
17 M83
18 M84
Manual of NCH02
Close switch 2
Close switch 3
Close switch 4
Close switch 5
Table 5-2 M instruction supported
- 49 -
 Loading...
Loading...