

Novatel OM-20000041 User Manual
OM-20000041 REV 1
OM-20000041 Rev 1
MiLLennium GPSCard
Software Version 4.50
Command Descriptions Manual
GPSCard
Products NovAtel Inc.
GPSCard
MiLLennium Command Descriptions Manual
Publication Number: OM-20000041
Revision Level: 1 98/11/03
This manual reflects Software Version 4.50
Proprietary Notice
Information in this document is subject to change without notice and does not represent a commitment on the part
of NovAtel Inc.. The software de scribed in this docum ent is furn ished un der a licence agreemen t or non- disclo sure
agreement. The software may be used or copied only in accordance with the terms of the agreement. It is against
the law to copy the software on any medium except as specifically allowed in the license or non-disclosure
agreement.
No part of this manual may be reprod uced or transm itted in an y form or by any means , electronic o r mechan ical,
including photocopyin g and recordin g, for any purp ose without the express writ ten permiss ion of a duly authorized
representative of NovAtel Inc.
The information contained within this manual is believed to be true and correct at the time of publication.
MiLLennium, NovAtel, Narrow Correlator and RT-2 are registered trademarks of NovAtel Inc.
GPSCard, GPSAntenna, GPSolution, and RT-20 are trademarks of NovAtel Inc.
All other brand names are trademarks of their respective holders.
© Copyright 1998 Novatel Inc. All rights reserved.
Unpublished rights reserved under International copyright laws.
Printed in Canada on recycled paper. Recyclable.
2 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1

Table of Contents
TABLE OF CONTENTS
TABLE OF CONTENTS
Software License 9
Software Support 10
Foreword 11
Congratulations! ....................................................................................................................................... 11
Scope ........................................................................................................................................................ 11
Prerequisites ............................................................................................................................................. 11
What’s New Since Software Version 4.47? .............................................................................................11
1Quick Start 12
1.1 Installation ....................................................................................... ................................. ..................12
Graphical Interface ......................................................................................................................12
1.2 Data Logging ................................ .... ............................................... .......................... .......... .... ...........13
1.3 Differential Operation ........................................ .......................... ......................... .............................15
Establish a Data Link ............................... ................................................ ......................... ....... ....15
Initialization - Reference Station .................................................................................................16
1.4 RTK Mode .......................................................................................................................................17
Data Communications Link ............................. ... .... .... ............................................... ..................17
System Initialization ......................... ............................................... ............................................18
Monitoring Your RTK Output Data ............................................................................................20
Options for Logging Differential Corrections .............................................................................20
Initialization - Rover Station .......................................................................................................21
2 Command Descriptions 23
2.1 General ................ ......................... ................................................ ......................................................23
Optional calculation of the checksum ..........................................................................................24
2.2 Standard Command Tabl es ....................................... .... .... ... ............................................... ...............25
2.3 WAAS ............................................................................................................................................. 29
2.3.1 WAAS GPSCard ................................................................................................................30
2.4 Special Data Input Commands ........................................................................................................30
2.4.1 Almanac Data .....................................................................................................................30
2.4.2 Differential Corrections Data .............................................................................................32
3 Data Logs 34
3.1 Output Logging ............................................................. ......................... ................................. .... ... ....34
3.2 NovAtel Format Data Logs ................................................................................................................35
General..........................................................................................................................................35
ASCII Log Structure ................................ .... ............................................... .................................35
Binary Log Structure ...................................................................................................................35
3.3 RTK ......................... ... .... ... ................................................ .................................................................36
3.4 NMEA format data Logs ................................ .... .... ............................................... .............................37
General .........................................................................................................................................37
3.5 GPS Time vs. Local Receiver Time .............................. .... ... .... ............................................... ...........37
3.6 Standard Log Tables .......................................................... .................................................................38
3.7 WAAS ............................................................................................................................................. 42
3.7.1 WAAS GPSCard Logs ....................................................................................................42
3.8 Pass-Through Logs ..........................................................................................................................42
3.8.1 Command Syntax ............................................................................................................43
3.8.2 ASCII Log Structure ........................................................................................................43
3.8.3 Binary Log Structure ..................................................................................... ..................44
4 Message Formats 45
4.1 RTCA-Format Messages ................................ ................................................ ......................... .... .......45
RTCA Standard Logs ..................................................................................................................46
4.2 RTCM-format Messages ...................... ... .... ......................... ............................................... ...............47
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 3

Table of Contents
RTCM General Message Format..................................................................................................48
RTCM Standard Commands ........................................................................................................49
RTCM Standard Logs ..................................................................................................................49
4.3 CMR Format Messaging .....................................................................................................................55
Using RT-2 or RT-20 with CMR Format Messages ....................................................................56
4.4 RINEX Format .................................................................................................................................56
4.4.1 Commands ........... ... ................................................ ............................................... ........... ...57
4.4.2 Logs ..................................................... ................................................ ................................58
A GPS Overview 62
A.1 GPS System Design ...........................................................................................................................62
The Space Segment ......................................................................................................................62
The Control Segment ...................................................................................................................63
The User Segment ........................................................................................................................63
A.2 Height Relationships ..........................................................................................................................63
A.3 GPS Positioning .................................................................................................................................64
A.3.1 Differential Positioning ......................................................................................................66
A.3.2 Pseudorange Algorithms ....................................................................................................67
A.4 Carrier-Phase Algorithms ..................................................................................................................71
B Multipath Elimination Technol ogy 73
B.1 Multipath ....................................... ... .... ............................................... ................................. ... ...........73
Why Does Multipath Occur? .......................................................................................................73
Consequences of Multipath Reception .........................................................................................74
B.2 Hardware Solutions For Multipath Reduction ...................................................................................74
Antenna Site Selection .......................... .... ............................................... ....................................74
Antenna Designs ................. .... ............................................... ................................................... ...75
Antenna Ground Planes ................................................................................................................76
NovAtel’s Internal Receiver Solutions for Multipath Reduction ................................................76
C Commands Summary 79
ACCEPT ......................................................................................................................................79
ANTENNAPOWER ....................................................................................................................81
ASSIGN .......................................................................................................................................82
CLOCKADJUST .........................................................................................................................83
COMn ...........................................................................................................................................84
COMn_DTR .................................................................................................................................84
COMn_RTS..................................................................................................................................85
CONFIG .......................................................................................................................................86
CRESET .......................................................................................................................................87
CSMOOTH ..................................................................................................................................88
DATUM .......................................................................................................................................89
DGPSTIMEOUT ..........................................................................................................................90
DIFF_PROTOCOL ......................................................................................................................91
DYNAMICS ................................................................................................................................92
ECUTOFF ....................................................................................................................................93
EXTERNALCLOCK ...................................................................................................................94
EXTERNALCLOCK FREQUENCY ..........................................................................................96
FIX HEIGHT ...............................................................................................................................97
FIX POSITION.............................................................................................................................98
FIX VELOCITY ..........................................................................................................................99
FREQUENCY_OUT ....................................................................................................................100
FRESET .......................................................................................................................................101
HELP ............................................................................................................................................102
IONOMODEL
LOCKOUT ....................................................................................................................... ............104
LOG ..............................................................................................................................................105
MAGVAR ........................................................................................................................ ............106
MESSAGES ...................................................................................................................... ...........108
POSAVE ......................................................................................................................................109
WAAS ................................................................................................................103
4 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1

Table of Contents
RESET..........................................................................................................................................110
RESETHEALTH ......................................................................................................................... 111
RESETHEALTHALL .................................................................................................................111
RINEX ..........................................................................................................................................112
RTCM16T ...................................................................................................................................113
RTCMRULE ...............................................................................................................................114
RTKMODE ..................................................................................................................................115
SAVEALMA ............................................................................................................................... 119
SAVECONFIG ............................................................................................................................ 120
SEND ...........................................................................................................................................121
SENDHEX ................................................................................................................................... 122
SETDGPSID ................................................................................................................................ 123
SETHEALTH .............................................................................................................................. 124
SETL1OFFSET ...........................................................................................................................125
SETNAV ..................... ................................................ ............................................... ..................126
SETTIMESYNC............................. ......................... ............................................... ......................128
UNASSIGN ................................................................................................................................. 129
UNASSIGNALL .........................................................................................................................129
UNDULATION ........................................................................................................................... 130
UNFIX ......................................................................................................................................... 131
UNLOCKOUT ............................................................................................................................131
UNLOCKOUTALL .....................................................................................................................131
UNLOG .......................................................................................................................................132
UNLOGALL ................................................................................................................................132
USERDATUM ............................................................................................................................133
VERSION.....................................................................................................................................134
WAASCORRECTION
WAAS ...................................................................................................135
D Logs Summary 136
ALMA/B ...................................................................................................................................... 136
BSLA/B
CDSA/B ....................................................................................................................................... 144
CLKA/B ....................................................................................................................................... 147
CLMA/B ....................................................................................................................................... 149
CMR ............................................................................................................................................151
COM1A/B and COM2A/B ..........................................................................................................152
DOPA/B ....................................................................................................................................... 153
ETSA/B .......................................................................................................................................155
FRMA/B.......................................................................................................................................157
GGAB...........................................................................................................................................158
GPALM ....................................................................................................................................... 159
GPGGA ........................................................................................................................................ 160
GPGLL ........................................................................................................................................161
GPGRS ........................................................................................................................................162
GPGSA ........................................................................................................................................163
GPGST .........................................................................................................................................164
GPGSV ........................................................................................................................................165
GPRMB ....................................................................................................................................... 166
GPRMC ....................................................................................................................................... 167
GPVTG ........................................................................................................................................ 168
GPZDA ........................................................................................................................................ 169
GPZTG ........................................................................................................................................170
MKPA/B ...................................................................................................................................... 171
MKTA/B....................................................................................................................................... 172
NAVA/B ....................................................................................................................................... 173
PAVA/B ....................................................................................................................................... 176
POSA/B ....................................................................................................................................... 178
PRTKA/B
PVAA/B ....................................................................................................................................... 181
PXYA/B ....................................................................................................................................... 183
RTK .............................................................................................................................141
RTK ...........................................................................................................................179
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 5

Table of Contents
RALA/B .......................................................................................................................................186
RASA/B .......................................................................................................................................187
RBTA/B .......................................................................................................................................189
RCCA ...........................................................................................................................................190
RCSA/B .......................................................................................................................................191
REPA/B ........................................................................................................................................192
RGEA/B/D ...................................................................................................................................193
RINEX ..........................................................................................................................................202
RPSA/B ........................................................................................................................................203
RTCA ...........................................................................................................................................204
RTCM ..........................................................................................................................................204
RTKA/B
RTKOA/B
RVSA/B .......................................................................................................................................210
SATA/B ........................................................................................................................................212
SPHA/B.........................................................................................................................................215
SVDA/B .......................................................................................................................................216
TM1A/B .......................................................................................................................................218
VERA/B ........................................................................................................................................219
VLHA/B .......................................................................................................................................220
WALA/B
WRCA/B ........................................................................................................................ ..............224
RTK .............................................................................................................................205
RTK .........................................................................................................................207
WAAS .........................................................................................................................222
E Comparison Of RT-2 And RT-20 225
E.1 RT-2 & RT-20 Performance ..............................................................................................................225
RT-2 Performance ........................................................................................................................226
RT-20 Performance ......................................................................................................................228
E.2 Performance Considerations ..............................................................................................................231
Performance Degradation .............................................................................................................231
F Standards and References 233
G Geodetic Datums 234
H Some Common Unit Conversions 236
H.1 Distance ...........................................................................................................................................236
H.2 Volume.............................................................................................................................................236
H.3 Temperature.....................................................................................................................................236
H.4 Weight .............................................................................................................................................236
H.5 Hexadecimal And Binary Equivalents ............................................................................................236
H.6 GPS Time of Week to Calendar Day (example) .............................................................................237
H.6.1 Calendar Date to GPS Time ...............................................................................................237
I Information Messages 238
Type 1 Information Messages ..................................................................................................................238
!ERRA ..........................................................................................................................................238
!MSGA .........................................................................................................................................238
Type 2 Information Messages ..................................................................................................................239
JListing Of Tables 242
K GPS Glossary of Terms 260
L GPS Glossary of Acronyms 268
M Index 270
6 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1

Table of Contents
FIGURES
2-1 The WAAS Concept .................................................................................................................................29
3-1 Pass-Through Log Data ............................................................................................................................43
A-1 NAVSTAR Satellite Orbit Arrangement ............................ .... ......................... .... ......................... ...........62
A-2 Illustration of GPSCard Height Measu reme nt s ............... .... .... ... ............................................... ...............64
A-3 Accuracy Versus Precision ....................................... ............................................... ...................... .... ... ....65
A-4 Example of Differential Positioning ........................................................................................................66
A-5 Single Point Averaging ............................................................................................................................69
A-6 Typical Differential Configura tio n ......... .... ............................................... ......................... .... ... ...............70
B-1 Illustration of GPS Signal Multipath ............................... ................................................ .........................73
B-2 Illustration of GPS Signal Multipath vs. Increased Antenna Height .......................................................75
B-3 Illustration of Quadrifilar vs. Microstrip Patch Antennae ........................................................................76
B-4 Comparison of Multipath Envelopes ........................................................................................................78
C-1 HELP Command Screen Display .............................................................................................................102
C-2 Appended Command Screen Display ..................................... ... ............................................... .... .... ... ....102
C-3 Illustration of Magnetic Variation & Correction ..................... ............................................... ..................107
C-4 Using SEND Command............................................................................................................................121
C-5 Illustration of SETNAV Parameters .............................................. .... ... .......................... ... ......................127
C-6 Illustration of Undulation .................................. ... .... .......................... ............................................... ... ....130
D-1 Example of Navigation Parameters ..........................................................................................................175
D-2 The WGS84 ECEF Coordinate System ...................................................................................................185
E-1 Typical RT-2 Horizontal Convergen c e - Static Mode ................................. .... ......................... ...............227
E-2 Typical RT-2 Horizontal Convergen c e - Kinematic Mod e ................... ............................................... ....227
E-3 RT-2 Accuracy Convergence ..................... ... .... ......................... ..............................................................228
E-4 Illustration of RT-2 Steady State Performa nce .................................. ... .......................... .........................228
E-5 Typical RT-20 Convergence - Static Mod e .......................................... .......................... .........................229
E-6 Typical RT-20 Convergence - Kinema tic Mode ........................ .... ......................... .................................230
E-7 RT-20 Steady State Performance .............................................................................................................230
E-8 RT-20 Re-initialization Process ...............................................................................................................232
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 7

Table of Contents
TABLES
1-1 GPSCard Pseudorange Differential Initialization Summary.....................................................................16
1-2 Latency-Induced Extrapolation Error .......................................................................................................17
2-1 Commands By Function Table .................................................................................................................25
2-2 GPSCard Command Summary .................................................................................................................27
3-1 Logs By Function Table ...........................................................................................................................38
3-2 GPSCard Log Summary ...........................................................................................................................41
4-1 Positioning Modes ....................................................................................................................................45
C-1 Antenna LNA Power Configuration .........................................................................................................81
C-2 Default Values of Process Noise Elements ..............................................................................................95
D-1 GPSCard Solution Status ..........................................................................................................................143
D-2 Position Type ............................................................................................................................................143
D-3 RTK Status for Position Type 3 (RT-20) ................................................................................................143
D-4 RTK Status for Position Type 4 (RT-2) ...............................................................................................143
D-5 Receiver Self-Test Status Codes ...............................................................................................................196
D-6 Range Record Format (RGED only) ........................................................................................................199
D-7 Channel Tracking Status ...........................................................................................................................201
D-8 Ambiguity Types ......................................................................................................................................209
D-9 Searcher Status ..........................................................................................................................................209
D-10 RTK Status ................................................................................................................................................209
D-11 GPSCard Range Reject Codes .................................. ................................................ ......................... .... ...213
D-12 GPSCard Velocity Status ..........................................................................................................................221
D-13 Health and Status Bits ...............................................................................................................................223
D-14 Data ID Type ............................................................................................................................................223
E-1 Comparison of RT-2 and RT-20 ............................... .... .... ............................................... .........................225
E-2 RTK Messages Vs. Accuracy ...................................................................................................................225
E-3 RT-2 Performance: Static Mode ...............................................................................................................226
E-4 RT-2 Performance: Kinematic Mode .......................................................................................................226
E-5 RT-2 Degradation With Respect To Data Delay ......................................................................................226
E-6 RT-20 Performance ..................................................................................................................................229
G-1 Reference Ellipsoid Constants ..................................................................................................................234
G-2 Transformation Parameters (Local Geodetic to WGS84) ........................................................................234
I-1 Type 1 !ERRA Types ...............................................................................................................................238
I-2 Type 1 !MSGA Types ..............................................................................................................................239
For you convenience these tables, up to and including Appendix E, are also listed in Appendix J, Page 242.
8 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1

Software License
SOFTWARE LICENSE
SOFTWARE LICENSE
BY OPENING THE SEALED DISK PACKAGE YOU ARE AGREEING TO BE BOUND BY THE TERMS OF THIS
AGREEMENT. IF YOU DO NOT AGREE TO THE TERMS OF THIS AGREEMENT PROMPTLY RETURN THE
UNOPENED DISK PACKAGE AND THE ACCOMPANYING ITEMS TO NOVATEL INC.
1. License: NovAtel Inc. (“NovAtel”) grants you a non-exclusive license (not a sale) to use one copy of the enclosed NovAtel
software on a single computer, and only with the product whose model number and serial number appear on the envelope.
2. Copyright: NovAtel ow ns, or has the r ight to sub license, all cop yright, trad e secret, pat ent and othe r proprie tary rights i n the
software and the software is protected by national copyright laws, international treaty provisions and all other applicable
national laws. You must treat the software like any other copyrighted material except that you may either (a) make one copy
of the software solely for backup or archi val purposes, or (b) transfer the software to a single hard disk provided y ou keep the
original solely for backup or archival purposes. You may not copy the product manual or written materials accompanying the
software.
3. Restrictions: You may not: (1) copy (other than as provided for in paragraph 2), distribute, rent, lease or sublicense all or
any portion of the software; (2) modify or prepare derivative works of the software; (3) use the software in connection with
computer-based services business or publicly display visual output of the software; (4) transmit the software over a network, by
telephone or electronically using any means; or (5) reverse engineer, decompile or disassemble the software. You agree to keep
confidential and use your best efforts to prevent and protect the contents of the software from unauthorize d di sclosure or use.
4. Term and Termination: This Agreement is effective until terminated. You may terminate it at any time by destroying the
software, incl ud ing a ll co mput er p ro gra ms and do cum enta tion, a nd e rasin g any co pies res id ing on c omp ut er eq ui pme nt. If y ou
do so, you should inform NovAtel in writing immediately. This Agreement also will terminate if you do not comply with any
of its terms or conditions. Upon such termination you are obligated to destroy the software and erase all copies residing on
computer equipment. NovAtel reserves the right to terminate this Agreement for reason of misuse or abuse of this software.
5. Warranty: For 90 day s from the date of shipment, Nov Atel warrants t hat the media (for example, disk ette) on which t he
software is contained will be free from defects in materials and workmanship. This warranty does not cover damage caused by
improper use or neglect. NovAtel does not warrant the contents of the software or that it will be error free. The software is
furnished "AS IS" and without warranty as to the performance or results you may obtain by using the software. The entire risk
as to the results and performance of the software is assumed by you.
6. For software UPDATES and UPGRADES, and regular customer support, contact the NovAtel GPS Hotline at
1-800-NOVATEL (Canada and the U.S.A. only), or directly for International Customers 1-403 -295-4900, Fax 1-40 3-295-
4901, e-mail to support@novatel.ca, visit out world wide web site at http://www.novatel.ca, or write to:
NovAtel Inc.
Customer Service Dept.
1120 - 68th Avenue NE
Calgary, Alberta,
Canada
T2E 8S5
7. Disclaimer of Warranty and Limitation of Liability:
a. THE WARRANTIES IN THIS AGREEMENT REPLACE ALL OTHER WARRANTIES, EXPRESS OR
IMPLIED, INCLUDING ANY WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE.
NOVATEL DISCLAIMS AND EXCLUDES ALL OTHER WARRANTIES. IN NO EVENT WILL NOVATEL'S
LIABILITY OF ANY KIND INCLUDE ANY SPECIAL, INCIDENTAL OR CONSEQUENTIAL DAMAGES, INCLUDING
LOST PROFITS, EVEN IF NOVATEL HAS KNOWLEDGE OF THE POTENTIAL LOSS OR DAMAGE.
b. NovAtel will not be liable for any loss or damage caused by delay in furnishing the software or any other performance
under this Agreement.
c. NovAtel's entire liability and you r exclusi ve remedies fo r our liabil ity of an y kind (incl uding liab ility for neglig ence)
for the software co ve red by thi s Ag reeme nt a nd al l oth er pe rfor ma nce or non pe rfo rman ce by Nov At el unde r or re l ated to thi s
Agreement are limited to the remedies specified by this Agreemen t.
This Agreement is govern ed by the laws of th e Province of Alb erta, Canada. Each of the parties here to irrevocably
attorns to the jurisdiction of the courts of the Province of Alberta.
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 9

Software Support
SOFTWARE SUPPORT
SOFTWARE SUPPORT
Software updates are software revisions to an existing model which improves (but does not increase) basic
functionality of the GPS receiver. During the one year warranty coverage following initial purchase, software
updates are supplied free of charge. After the warranty has exp ired, so ftware updates and upd ated manuals may be
subject to a nominal charge.
Software upgrades are software releases which increase basic functionality of the receiver from one model to a
higher level model type. When available, upgrades can be purchased at a price which is the differen ce between the
two model types on the current NovAtel GPS Price List plus a nominal service charge.
Software updates and upgrades are obtained through NovAtel authorized dealers or NovAtel Customer Support.
Contact your local NovAtel dealer for more information.
To locate a dealer in your area, contact NovAtel in any of the following ways:
• GPS Hotline at 1-800-NOVATEL (1-800-668-2835)
(U.S.A. and Canada only; 8 a.m. - 4:30 p.m. Mountain Standard Time)
• telephone: 1-403-295-4900 (8 a.m. - 4:30 p.m. Mountain Standard Time)
•fax: 1-403-295-4901
•e-mail: support@novatel.ca
• web site: http://www.novatel.ca
• postal address:
NovAtel Inc.
Customer Service Dept.
1120 - 68th Avenue NE
Calgary, Alberta
Canada
T2E 8S5
10 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
Foreword
FOREWORD
Congratulations!
Thank you for purchasing a NovAtel GPSCard product.
Whether you have bought a stand al one GPSC ard or a packaged receiv er you will have also received companion
documents to this manual. They will help yo u get the hardware operational. Afterwards, this text will be your
primary MiLLennium GPSCard command and logging reference source.
Scope
The MiLLennium Command Descriptions Manual describes each command and log that the MiLLennium
GPSCard is capable of accepting or outputting. Sufficient detail is provided so that you can understand the
purpose, syntax, and structure of each command or lo g and be able to effectively commun icate with the GPSCard,
thus enabling the developer to effectively use and write custom interfacing software for specific needs and
applications. The manual is organized into chapters which allow e asy access to approp riate information ab out the
GPSCard.
This manual does not address in detail any of the GPSCard hardware attributes or installation information. Please
consult the appropriate companion manual for hardware or system technical specifications information.
Furthermore, should you encounter any functional, operational, or interfacing difficulties with the GPSCard,
consult the appropriate hardware manual for NovAtel warranty and customer support information.
Prerequisites
As this reference manual is focused on the GPSCard commands and logging protocol, it is necessary to ensure that
the GPSCard has been properly installed and powered up according to the instructions outlined in the companion
hardware manual before proceeding.
To use your NovAtel GPS receiver effectively, you should be familiar with the Global Po sitioning System (
as it applies to positioning, navigation, and surveying applications. For your reference Appendix A of this manual
provides an overview of the Glob al Positioning System.
This manual covers the full performance cap abilities of all MiLLennium GP SCards. Every MiLLenniu m can be
upgraded through a family of firmware models, each havin g unique features. T herefore, dep ending on the sof tware
configuration of your MiLLennium, certain commands and logs may not be accessible. Feature-tagging symbols
have been created to help clarify which commands and logs are only available with a certain option:
RTK Features available only with MiLLennium GPSCards equipped with the RT-20 or RT-2 option
WAAS Features available only on MiLLennium GPSCards equipped with the WAAS option
GPS)
What’s New In Version 4.50?
1. RTCM Types 18 & 19, or RTCM Type 22, are now supported with Type 3 for reference position.
2. It is also possible to send and receive CMR messages.
3. Two new Wide Area Augmentation System (WAAS) commands, WAASCORRECTION and
IONOMODEL, enable the use of the WAAS corrections in the position filter. By default these features
are disabled.
4. A new WAAS log, WALA/B, provides WAAS satellite-specific data.
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 11
1 Quick Start
1 QUICK START
1 QUICK START
This chapter will help you get started quickly regardless of whether you wish to carry out real-time kinematic
(RTK) positioning, operate in differential modes or simply log data. Each section references additional sources of
information.
1.1 INSTALLATION
For more detailed instructions on the installation and set up of your GPSCard please refer to the accompanying
MiLLennium GPSCard Guide to Installation and Operation.
The MiLLennium receiver is designed for flexibility of integration and configuration. You are free to select an
appropriate data and signal interface, power supply system and mounting structure. This concept allows OEM
purchasers to custom-design their own GPS-based positioning system around the MiLLennium GPSCard.
Installing the MiLLennium GPSCard typically co nsists of the following:
• Mount the GPSCard in a secure enclosure to reduce environmental exposure, RF
interference and vibration effects
• Pre-wire the I/O harness and the 64-pin DIN female connector for power and
communications, then connecting them to the OEM series GPSCard
• Install the GPSAntenna, then connect to the GPSCard
•(Optional) Install an external oscillator if additional precision and stability is required
OPERATION
Once the hardware and software i nstallat ions have been complet ed, you are now r eady t o begin initial oper ation o f
the GPSCard receiver.
Communication with the MiLLenni um GPSCard consist s of issu ing comm ands th rough the COM1 or COM2 port
from an external serial communications device. This could be either a terminal or an IBM-compatible PC that is
directly connected to a MiLLennium GPSCard COM port using a null modem cable.
TURNING ON
The initial operating software and firmware of the MiLLennium GPSCard resides in its read-only memory. As
such, the unit “self- boots ” upon power-up . Th e green LED indi cator sh ould blink about once per second if the unit
is operating normally. The red one lights up if an error is detected during a self-test. The self-test status word can
be viewed in the
If a persistent error develops please contact the NovAtel GPS Customer Service Department f or f urth er assistance
COMMUNICATION DEFAULT SETTINGS
COM1 and COM2 for the MiLLennium GPSCards are defaulted to the following RS232 protocol:
RGEA/B/D and RVSA/B data outpu t logs.
• 9600 bps, no parity, 8 data bits, 1stop bit, no handshake, echo off
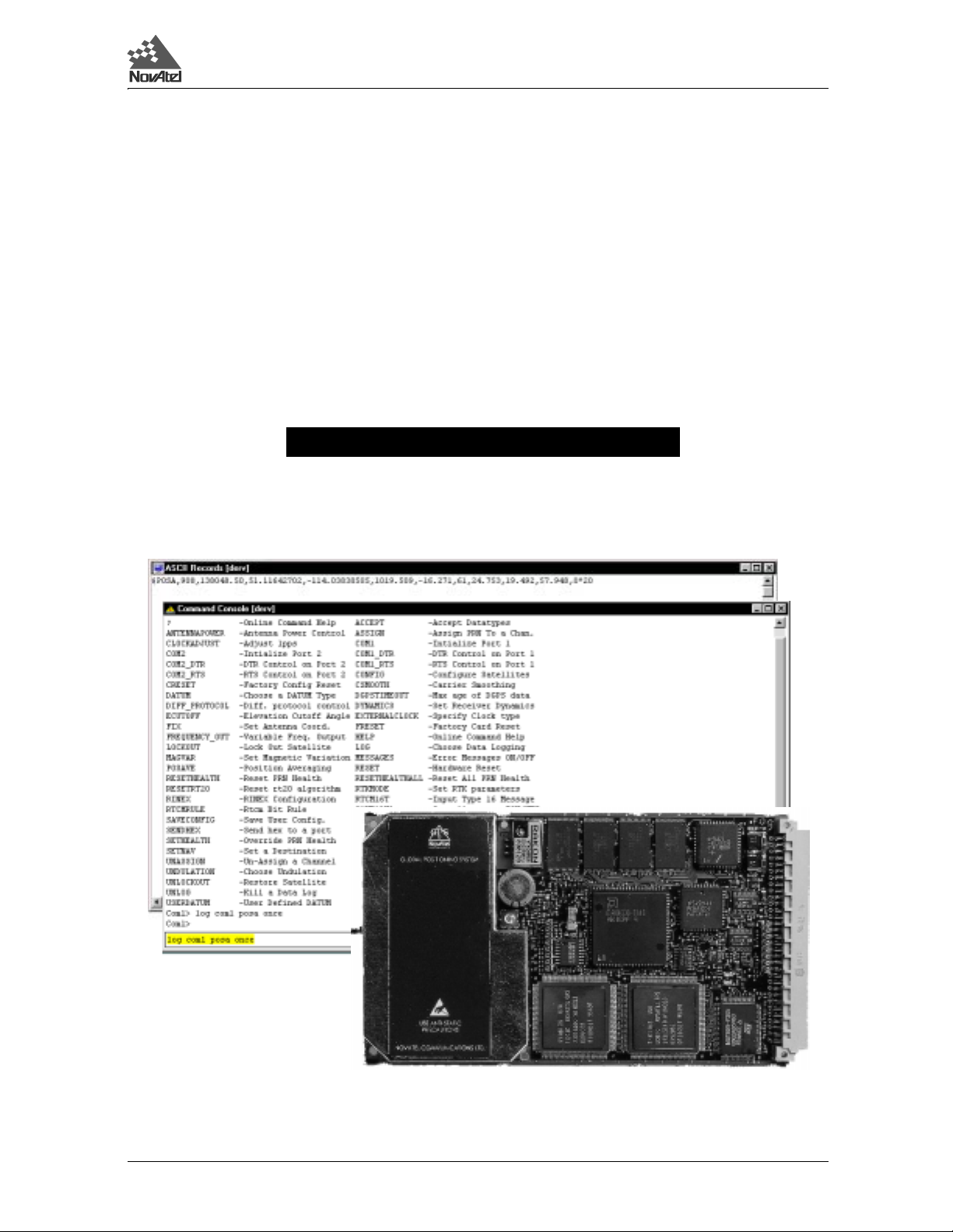
Graphical Interface
Your GPSCard comes with a disk containing NovAtel’s graphical interface software GPSolution, a Microsoft
Windows-based progr am, enablin g you to u se your GPSCar d withou t stru ggling with communicat ions pr otoco l or
writing make-do software.
12 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1

1 Quick Start
The View menu options allow you to select or de-select vari ou s vis ual aid s and displ ay s creens . Take a look at all
of the options and keep open those you wish to display. To send commands and log data the Command Console
screen should be visible. ASCII format logs can be monitored on the ASCII Record screen.
e.g. On the command line of the Command Console screen type:
After you hit the <Enter> key the ASCII Record screen will display the output for your current position. The
B log is described on Page 178.
log com1 posa once
POSA/
1.2 DATA LOGGING
The GPSCard has four major logging formats:
• No vAtel Format Data Logs (ASCII/Binary)
•
NMEA Standard Format Data Logs (ASCII)
•
RTCM Standard Format Data Logs (Binary)
•
RTCA Standard Format Data Logs (Binary)
All data types can be logged using several methods of triggering each log event. Each log is initiated using the
command. The LOG command and syntax are listed following.
LOG
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 13
1 Quick Start
Syntax: log [port],datatype,[trigger],[period],[offset],{hold}
Syntax Description Example
LOG LOG
port COM1 or COM2 Defaults to the port that the command was entered on. COM1
datatype Enter one of the valid ASCII or Binary Data Logs (see Chapter 4, Page 34 and Appendix D, Page 136) POSA
trigger Enter one of the following triggers. ONTIME
ONCE Immediately logs the selected data to the selected port once. Default if trigger field is left
ONMARK Logs the selected data when a MARKIN electrical event is detected. Outputs internal buffers
Range Value Default
ONNEW Logs the selected data each time the data is new even if the data is unchanged.
ONCHANGED Logs the selected data only when the data has changed.
ONTIME
[period], [offset]
CONTINUOUSLY Will log the data all the time. The GPSCard will generate a new log when the output buffer
period Use only with the
following values: 0.05, 0.10, 0.20, 0.25, 0.50, 1, 2, 3, ... , 3600 seconds but may be limited by the GPSCard model
and previously requested logs. Selected data is logged immediately and then periodic logging of the data will start
at the next even multiple of the period. If a period of 0.20 sec is chosen, then data will be logged when the receiver
time is at the 0.20, 0.40, 0.60 and the next (0.80) second marks. If the period is 15 seconds, then the logger will
log the data when the receiver time is at even 1/4 minute marks. The same rule applies even if the chosen period
is not divisible into its next second or minute marks. If a period of 7 seconds is chosen, then the logger will log at
the multiples of 7 seconds less than 60, that is, 7, 14, 21, 28, 35, 42, 49, 56 and every 7 seconds thereafter.
offset Use only with the
logging events from the above startup rule. If you wished to log data at 1 second after every minute you would set
the period to 60 seconds and the offset to 1 second (Default is 0).
hold Will prevent a log from being removed when the UNLOGALL command is issued HOLD
blank.
at time of mark - does not extrapolate to mark time. Use MKPA/B for extrapolated position
at time of mark.
Immediately logs the selected data and then periodically logs the selected data at a
frequency determined by the period and offset parameters. The logging will continue until
an UNLOG command pertaining to the selected data item is received (see UNLOG
Command, Page 132).
associated with the chosen port becomes empty. The continuously option was designed for
use with differential corrections over low bit rate data links. This will provide optimal record
generation rates. The next record will not be generated until the last byte of the previous
record is loaded into the output buffer of the UART.
ONTIME
ONTIME
trigger. Units for this parameter are seconds. The selected period may be any of the
trigger. Units for this parameter are seconds. It provides the ability to offset the
60
1
The syntax for a command can contain optional parameters (OPT1, OPT2, ...). OPT2 may only be used if it
is preceded by OPT1. OPT3 may only be used if it is preceded by OPT2 and so on. Parameters after and
including OPT1 will be surrounded by square brackets.
An optional parameter such as {hold} surrounded by braces may be used with the log command without any
preceding optional parameters. Example:
log com1 posa hold
log com1 posa 60 1 hold
Example:
log com1,posa,ontime,60,1
LOG syntax does not include a trigger type, it will be output only once following execution of the LOG
If the
command. If trigger type is specified in the LOG syntax, the log will continue to be output based on the trigger
specification. Specific logs can be disabled using the
by using the
listed in the receiver configuration status log (
UNLOGALL command (see Chapter 2, Page 23 and Appendix C, Page 79). All activated logs will be
RCCA), Page 190.
UNLOG command, whereas all enabled logs will be disabled
The [port] parameter is optional. If [port] is not specified, [port] is defaulted to the port that the command was
received on.
14 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
1 Quick Start
COMMONLY USED LOGS
Type Logs Trigger
Positioning PRTKA/B
POSA/B
Post Processing RGEA/B/D
REPA/B, ALMA/B
NMEA Position GPGLL
GPGGA
Other useful logs are
• RCCA to list the default command settin gs
• ETSA to monitor the channel tracking status
• SATA to observe th e satellite specific data
• DOPA to monitor the dilution of precision of the current satellite constellatio n
• RVSA to monitor the receiver status
For further information on output logging see Chapter 4, Page 34 and the individual logs listed alphabetically in
Appendix D, Page 136.
ontime or onmark
ontime
onchanged
ontime or onmark
Use the
HELP command to list all available commands. For more information on sending commands see Chapter
2, Page 23 and the individual commands listed alphabetically in Appendix C, Page 79.
1.3 DIFFERENTIAL OPERATION
The MiLLennium GPSCard is ideal for design into DGPS systems because it is capable of operating as either a
reference station or a rover station. .
The GPSCard is capable of utilizing various formats of differential corrections. These formats are divided into two
primary groups
For detailed data structure concerning these logs, please see:
Establish a Data Link
Operating the GPSCard with a DGPS system requires that the reference station broadcast differential correction
data messages to one or more rover receivers. As there are many methods by which this can be achieved, it is up
to you to establish an appropriate data link that best suits your user requirements.
Whatever data link is chosen, the operator of the reference station will want to ensure that the bit rate of data
transmission is suitable for the anticipated data li nk and remote users. U se the GPSCard C OMn comm and to the
COM port default bit rate (default is 9600 bps, no parity, 8 data bits, 1 stop bit, no handshake, echo off).
RTCM and RTCA.
Chapter 3, Page 34
Chapter 4, Page 45
Appendix D, Page 136
Note that the GPSCard COMn_DTR and COMn_RTS commands are available for remote device keying (such as
a radio transmitter). These commands allow for flexible control of the DTR and RTS lines to be precisely timed
with log transmissions.
Further information may be found in Appendix A.
Table 1-1, following, is a GPSCard pseudorange d ifferential initialization summary.
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 15
1 Quick Start
Required:
FIX POSITION lat lon hgt id (health)
LOG port DATATYPE ontime 5
Table 1-1 GPSCard Pseudorange Differential Initialization Summary
Reference Station Remote Station
Required:
ACCEPT port DATATYPE
Recommended Options:
LOG DATATYPES (binary):
LOG DATATYPES (acii):
RTCMB
RTCAB
RTCM
RTCA
RTCMA
RTCAA
Related Commands/Logs:
RTCMRULE
DATUM
Example 1:
fix position 51.3455323 -114.2895345 1201.123 555 0
log com 1 RTCM ontime 2
Example 2:
fix position 51.3455323 -114.2895345 1201.123 555 0
log com2 rtcaa ontime 2
Note: Italicized entries indicate user definable.
Recommended Options:
ACCEPT DATATYPES (binary):
ACCEPT COMMANDS (ascii):
Related Commands/Logs:
RTCMRULE
DATUM
POSA/B
VLHA/B
CDSA/B
GPGGA
Example 1:
accept com2 rtcm
log com1 posa ontime 1
Example 2:
accept com2 commands
log com1 posa ontime 0.2
log com1 vlha ontime 0.2
RTCM
RTCA
RTCMA
RTCAA
Initialization - Reference Station
Differential mode of operation is established at the reference station through a two step process: fix position and
logging observation and correction data.
FIX POSITION
The reference station must initialize the precise position of its reference antenna phase centre (lat/lon/hgt). This is
accomplished by utilizing the GPSCard
Syntax:
FIX POSITION lat lon height station id health
Example:
fix position 51.3455323,-114.2895345,1201.123,555,0
16 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
FIX POSITION command. The syntax is as follows:
1 Quick Start
NOTE 1: Entry of the station ID and health are optional. For a CMR cor rection ty pe the station ID must be < 31.
NOTE 2: The accuracy of the reference station’s
FIX POSITION setting will directly affect the accuracy of its
computed differential corrections. Good results at the rover station are dependent on the reference
station’s combined position errors being kept to a minimum (e.g., fix position error + multipath errors).
NOTE 3: The GPSCard performs all computations based on WGS84 and is defaulted as such, regardless of
DATUM command setting. The datum in which you choose to operate is converted from WGS84;
therefore, all differential corrections are based on WGS84. Ensure that any change in your operating
datum is set prior to
FIX POSITION.
NOTE 4: When transmitting RTCM type data, the GPSCard has various options for assigning the number of data
bits per byte. Please see the GPSCard command
RTCMRULE, Page 114 for further information
concerning RTCM data bit rule settings .
NOTE 5: The FIX POSITION “health” field entered will be repo rted in word 2 of the RTCM message frame header.
Once the GPSCard has its po sition data fixed an d is tracking t hree or more satellites, i t is now ready t o transmit
differential correction and observation data to the rover stations.
LOG BROADCAST DATA
Assuming that a data link has been es tablished, use th e GPSCard log comm and to send observat ion and differenti al
corrections data for broadcast to the rover stations.
Syntax:
LOG port data ontime seconds
Example:
log com1 rtcm ontime 5
REMINDER: Ensure that the bit rate of the data link is suitable for the differential type, logging rate and
maximum message length of the data type being logged.
1.4 RTK MODE
NovAtel’s RTK system utilizes proprietary messaging as w ell as RTCM Types 18 and 19, and can also receive
CMR messages from a non-NovAtel base station. For more information on specific message formats please see
Chapter 4, Page 45.
NOTE: No guarantee is made that the MiLLennium will meet its performance specifications if non-NovAtel
accessories (e.g. antenns, RF cable) are used.
Data Communications Link
It is the user’s responsibility to pro vide a data communications link between the reference station and remote
station. The data transfer rate must be high enough to ensure that sufficient reference station messages reach the
remote station to keep extrapolation errors from growing too large; see Table 1-2.
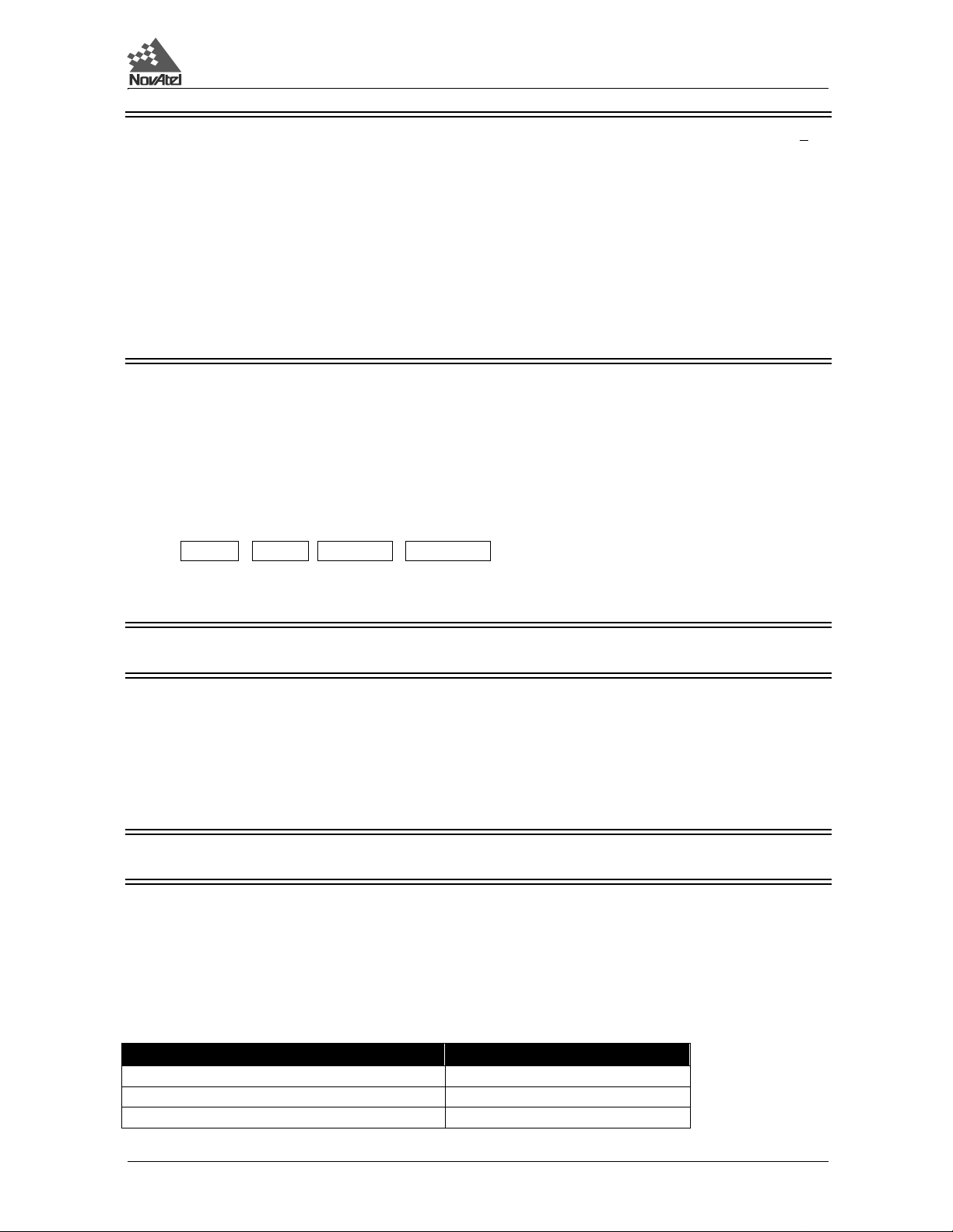
Table 1-2 Latency-Induced Extrapolation Error
Time since last reference station observation Typical extrapolation error (CEP)
0-2 seconds 1 cm/sec
2-7 seconds 2 cm/sec
7-30 seconds 5 cm/sec
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 17
1 Quick Start
Generally, a communications link capable of data throughput at a rate of 4800 bits per second or higher is
sufficient. However, it is possible to satisfactorily use a lower rate (e.g. 2400 bps) with th e RTCA, RTCM59 and
CMR formats. RTCM Types 18 and 19 may require a higher rate; see Chapter 4, Message Formats, Page 45 for
additional information. The minimum data transfer rate is based on the following:
1. RT-2 requires that the reference station periodically transmit two RTCA Standard Type 7 messages:
• An RTCAOBS message contains reference station satellite observation information, and
should be sent once every 1 or 2 seconds.
• An RTCAREF message contains reference station position information, and should be
sent once every 10 seconds.
OR periodically tr ansmit an RTC M Type 18 and RTCM Type 19 ( RTCM1819) message togeth er with an
RTCM Type 3 message:
• A Type 3 message contains reference station position information, and should be sent
once every 10 seconds (although it is possible to send it as infrequently as once every 30
seconds).
• RTCM1819 gives raw measurement information (Type 18 provides carrier phase
measurements, while Type 19 provides pseudorange measurements) and should be sent
once every 1 or 2 seconds.
Note: This message can be sent in RTCM Version 2.1 o r Version 2.2 fo rmat, co ntro lled with the RTKMODE
command.
and, optionally, also periodically transmit an RTCM Typ e 22 message together with an RTCM Type 3
message:
• A Type 3 message contains reference station position information, and should be sent
once every 10 seconds (although it is possible to send it as infrequently as once every 30
seconds).
• A Type 22 message gives extended reference station parameters and should be sent once
every 10 seconds.
OR periodically transmit two CMR messages where the station ID, see Page 98, must be
transmitting CMR corrections:
• A C M ROBS message contains reference station satellite obs ervation information, and
should be sent once every 1 or 2 seconds.
• A CMRREF message contains reference station position information, and should be sent
once every 10 seconds.
2. RT-20 requires that the reference station periodically transmit either the RTCA me ssages listed above (the
recommended option), or RTCM 1819 or CMR messages or the RTCM SC-104 Type 3 & 59N messages:
• A Type 3 message contains reference station position information, and should be sent
once every 10 seconds (although it is possible to send it as infrequently as once every 30
seconds).
• A T ype 59N message contains reference station satellite observation information, and
should be sent once every 2 seconds.
≤ 31 when
Further information on RTCA, RTCM and CMR message formats is contained in Chapter 6.
System Initialization
The RTK system is designed for ease of use: you set up the remote station, enter a command so that it accepts RT2 or RT-20 messages from the reference station, and are ready to go. There are options, however, which can be
18 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1

1 Quick Start
used to adapt the system to a specific application. Some options apply only to the reference station, while others
apply only to the remote station. Detailed descriptions can be found in Appendix C, Commands Summary.
In the following sections, keep the following in mind :
• Dynamics modes. For reliable performance the antenna should not move more than 1-2
cm when in static mode. See the
Appendix C, Page 115 for more information.
RTKMODE commands in Chapter 2, Page 23 and
• When using the
sea level; it will be converted to ellipsoidal height inside the receiver. You can enter an
undulation value, if desired, using the
receiver estimates an undulation with its internal table. The format of the optional station
ID field depends on whether RTCM or RTCA messages are being used: if RT CM, any
number from 0 - 1023 is valid, while if RTCA, any 4-character string of numbers and
upper-case letters, enclosed in quotation marks, is valid. See Appendix C, Page 98 for
additional information on the station id field.
• The COMn field refers to the serial port (either COM1 or COM2) to which data
communications equipment is connected. The serial port assignment at the reference and
remote stations need not be the same; e.g. a radio transmitter might be connected to
COM1 at the reference station, and a radio receiver to COM2 at the remote station.
FIX POSITION command, the height entered must be in metres abo ve mean
UNDULATION command; if none is entered, the
INITIALIZATION FOR RTCA-FORMAT MESSAGING (RT-2 OR RT-20)
The following commands will enable RTCA-format messaging and allow RT-2 or RT-20 to operate with the
remote station either at rest or in motion. Note that the optional station health field in the existing FIX POSITION
command is not currently implemented in NovAtel’s RTCA messages, though it will be in the future.
1. At the reference station:
fix position lat,lon,height,
log comn,rtcaref,ontime,interval
n
log com
,rtcaobs,ontime,interval
station id
Example:
fix position 51.11358042,-114.04358013,1059.4105,”RW34”
log com1,rtcaref,ontime,10
log com1,rtcaobs,ontime,2
2. At the remote station:
accept comn,rtca
Example:
accept com2,rtca
Congratulations! Your RTK system is now in operation!
INITIALIZATION FOR RTCM59-FORMAT MESSAGING (RT-20 ONLY)
Although RT-20 can operate with either RTCA or RTCM-format messaging, the use of RTCA-format messages is
recommended (see Chapter 4, Page 45 for further information on this topic). Nevertheless, the following
commands will enable RTCM59-format messaging and allow RT-20 to operate with the remote station either at
rest or in motion:
1. At the reference station:
fix position lat,lon,height,
log comn,rtcm3,ontime,interval
n
log com
,rtcm59,ontime,interval
station id,station health
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 19
1 Quick Start
Example:
fix position 51.11358042,-114.04358013,1059.4105,119,0
log com1,rtcm3,ontime,10
log com1,rtcm59,ontime,2
2. At the remote station:
accept comn,rtcm
Example:
accept com2,rtcm
Congratulat i ons! Your RT-20 system is now in ope ration!
Monitoring Your RTK Output Data
At the remote station, you could now select any or all of these output logs for positioning information:
• BSLA/B Baseline Measurement
• NMEA-format logs
• POSA/B Computed Position
• PRTKA/B Best Position
• RPSA/B Reference Station Position & Health
• RTKA/B RTK Output - Time Matched Positions
The POSA/B, PRTKA/B and NMEA-format logs contain the low-latency position; the RTKA/B logs contain the
matched position. The low-latency solution is the recommended one for kinematic users, while th e matched
solution is the one recommended for stationary users. For a discussion on low-latency and matched positions, see
the Differential Positioning section of Appendix A, Page 66.
Options for Logging Differential Corrections
SET DGPSTIMEOUT
The DGPSTIMEOUT command allows the reference station to set the delay by which it will inhibit utilization of new
ephemeris data in its differential corrections. This delay ensures that the remote receiv ers have had sufficient time
to collect updated ephemeris data as well.
A delay of 120 to 130 seconds will typically ensure that the rov er stations have collected update d ephemeris. After
the delay period is passed, the reference station will begin using new ephemeris data. To enter an ephemeris delay
value, you must first enter a numeric placeholder in the DGPS delay field (e.g., 2). When operating as a reference
station, DGPS delay will be ignored (see the
C, Page 90 for further information on using this command at rover stations.)
Syntax:
DGPSTIMEOUT dgps delay ephem delay
Command Option Description Default
DGPSTIMEOUT Command
dgps delay min. 2
max. 1000
ephem delay min. 0
max. 600
DGPSTIMEOUT command found in Chapter 2, Page 23 and Appendix
Maximum age in seconds 60
Minimum time delay in seconds 120
Example:
dgpstimeout 2,300
USING RTCM SC-104 LOG TYPES
20 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
1 Quick Start
RTCM SC-104 is a standard for transmitting differential corrections between equipment from different
manufacturers. The NovAtel GPSCard is capable of transmitting or receiving
RTCM data.
To facilitate transmitting the
RTCM data over shared data links, the GPSCard is also capable of sending the RTCM
log in NovAtel ASCII format (RTC MA) or with the NovAtel binary header (RTCMB) added to allow synchr onous
transmission and reception along with other data types.
REMEMBER: When sending or receiving RTCM log types, it is important to ensure that all con nected
equipment are using the same RTCMRULE for compatibility.
The easiest method to send RTCM standard logs is from the COM1 or COM2 ports of the ref erence GPSCard. The
easiest method to receive the RTCM data is through the COM1 or COM2 port of the rover GPSCard. The rover
GPSCard must issue the “ACCEPT port RTCM” command to dedicate a port before it will accept the
RTCM data
into that port.
The
RTCMA log can be intermixed with other NovAtel ASCII data over a comm on communication port. It will be
directly interpreted by a rover GPSCard as a special data input command ($RTCM). “ACCEPT port
COMMANDS” must be used with this input command. A non-NovA tel rover station will need to strip off the
header ($RTCM) and terminator (* xx), then convert the hexad ecimal data to binary before the RTCM standard d ata
can be retrieved.
The
RTCMB log can be intermixed with other NovAtel binary data over a common communication port.
REMEMBER: Use the CDSA/B logs to monitor the COM port activity, success, and decoding errors.
USING RTCA LOG TYPES
The RTCA (Radio Technical Commission for Aviation Services) Standard is being designed to support
Differential Global Navigation Satellite System (DGNSS) aviation applications. The perceived advantage to using
RTCA type messages for transmitting and receiving differential corrections versus using RTCM type messages is that
RTCM transmits 30-bit words, and the data is difficult to decode and process because of the parity algorithm and
irregular word sizes used.
RTCA messages are therefore smaller, they have a 24 bit CRC that is much more robust than RTCM messages, and
they permit the use of a four-alpha-character station ID.
RTCA is transmitted in 8-bit words, which are easier to generate, process and decode. The
RTCA standard logs can be received through the COM1 or COM2 port of the rover GPSCard. The remote
GPSCard must issue the “ACCEPT port RTCA” command to dedicate a port before it will accept the
input to that port. The
RTCA logs cannot be intermixed with other logs.
RTCA data
The RTCAA log can be intermixed with o ther NovAtel ASCI I data o ver a co mmon co mmunicatio ns p ort. It will
be directly interpreted by a rover GPSCard as a special data input co mmand ($RTCA). “ACCEPT por t commands”
must be used with this input command. A non-NovAtel r over station will need to strip off the head er ($RTCA) and
terminator (*xx), then convert the hexadecimal data to binary before the RTCA standard can be retrieved.
The RTCAB log can be intermixed with other NovAtel binary data. The remote GPSCard identifies the
by the message block identifier contained in the message, and will interpret only the
RTCA data portion of the log.
RTCAB log
NOTE: The CDSA/B logs may be used to monitor the COM port activity and differential data decode success.
Initialization - Rover Station
It is necessary to initialize the rover receiver to accept observation data from the reference station. If the receiver
is not correctly initialized, it will proceed to compute solutions in single point positioning mode.
Before initializing, ensure that the data link with the reference station has been properly set up. As well, ensure that
the COM port which is to receive th e differential data is set up to match the bit rate and protocol settin gs of the
reference station broadcast data.
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 21
1 Quick Start
Establishing differential mode of operation at the rover receiver is primarily a one-step pr ocess whereby the accept
command is used to enable reception of observation data from the reference station.
ACCEPT COMMAND
The accept command is primarily used to set the GPSCard’s COM port command interpreter for acceptance of
various data formats (see the
ACCEPT command in Chapter 2, Page 23 and Appendix C, Page 79).
Syntax
ACCEPT port mode
Example:
accept com2 rtcm
Once intitialized, the rover GPSCard receiver will operate in single point mode until the differential messages are
received. If the data messages are lost, the GPSCard will revert to single point positioning until the pseudorange
correction messages are restored.
NOTE: Ensure that the GPSCard RTCMRULE settings agree with the bit rule being transmitted by th e RTCM
reference station. Unless otherwise set, all GPSCards default to 6CR.
LOG POSITION DATA AND OTHER USEFUL DATA
The GPSCard remote receiver has many options for information d ata log ging . To mon i tor position status, the user
may find the
velocity data can be found in the
PRTKA/B logs to be the most informative. Other o ptions exist, su ch as POSA/B and GPGGA. As well,
VLHA/B, SPHA/B and GPVTG logs. It is really up to your specific applications as to
the full range of logs you require.
22 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
2 Command Descriptions
2 COMMAND DESCRIPTIONS
2 COMMAND DESCRIPTIONS
2.1 GENERAL
This section describes all commands accepted by the GPSCard with the exception of the "Special Data Input
Commands". They are listed in alphabetical order. For descriptions of output logs using the
Chapter 3.
The GPSCard is capable of responding to over 50 dif ferent in put co mman ds. You will find th at once y ou becom e
familiar with these commands, the GPSCard of fers a wide range in operational flexibility. All commands are
accepted through the
COM1 and COM2 serial ports. See Table 2-1, P age 25 for a complete command listing.
NOTE: You will find the HELP command a useful tool for inquiring about the various commands available.
The following rules apply when entering commands from a terminal keyboard:
LOG command, see
• T he commands are not case sensitive (
e.g.
e.g.
HELP or help
FIX POSITION or fix position
COMMAND or command).
• All commands and required entries can be separated by a space or a comma
(command,variable
OR command variable).
e.g. datum,tokyo
e.g. datum tokyo
e.g. fix,position,51.3455323,-117.289534,1002
e.g. fix position 51.3455323 -117.289534 1002
e.g. com1,9600,n,8,1,n,off
e.g. com1 9600 n 8 1 n off
e.g. log,com1,posa,onchanged
e.g. log com1 posa unchanged
• At the end of a command or command string, press the <CR> key. A carriage return is what
the card is looking for and is usually the same as pressing the <Enter> key.
• Most command entries do not provide a response to the entered command. Exceptions to
this statement are the
VERSION and HELP commands. Otherwise, successful entry of a
command is verified by receipt of the COM port prompt (i.e. COM1> or COM2>).
The syntax for a command can contain optional parameters (OPT1, OPT2, ...). OPT2 may only be used if it
is preceded by OPT1. OPT3 may only be used if it is preceded by OPT2 and so on. Parameters after and
including OPT1 will be surrounded by square brackets.
An optional parameter such as {hold} surrounded by braces may be used with the log without any preceding
optional parameters
Example:
log com1 posa 60 1 hold
log com1 posa hold
When the GPSCard is first powered up, or after a FRESET command, all commands will revert to the factory default
settings. An example is shown below. The
Use the
RCCA log to reference station command and log settings.
SAVECONFIG command can be used to modify the power-on defaults.
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 23
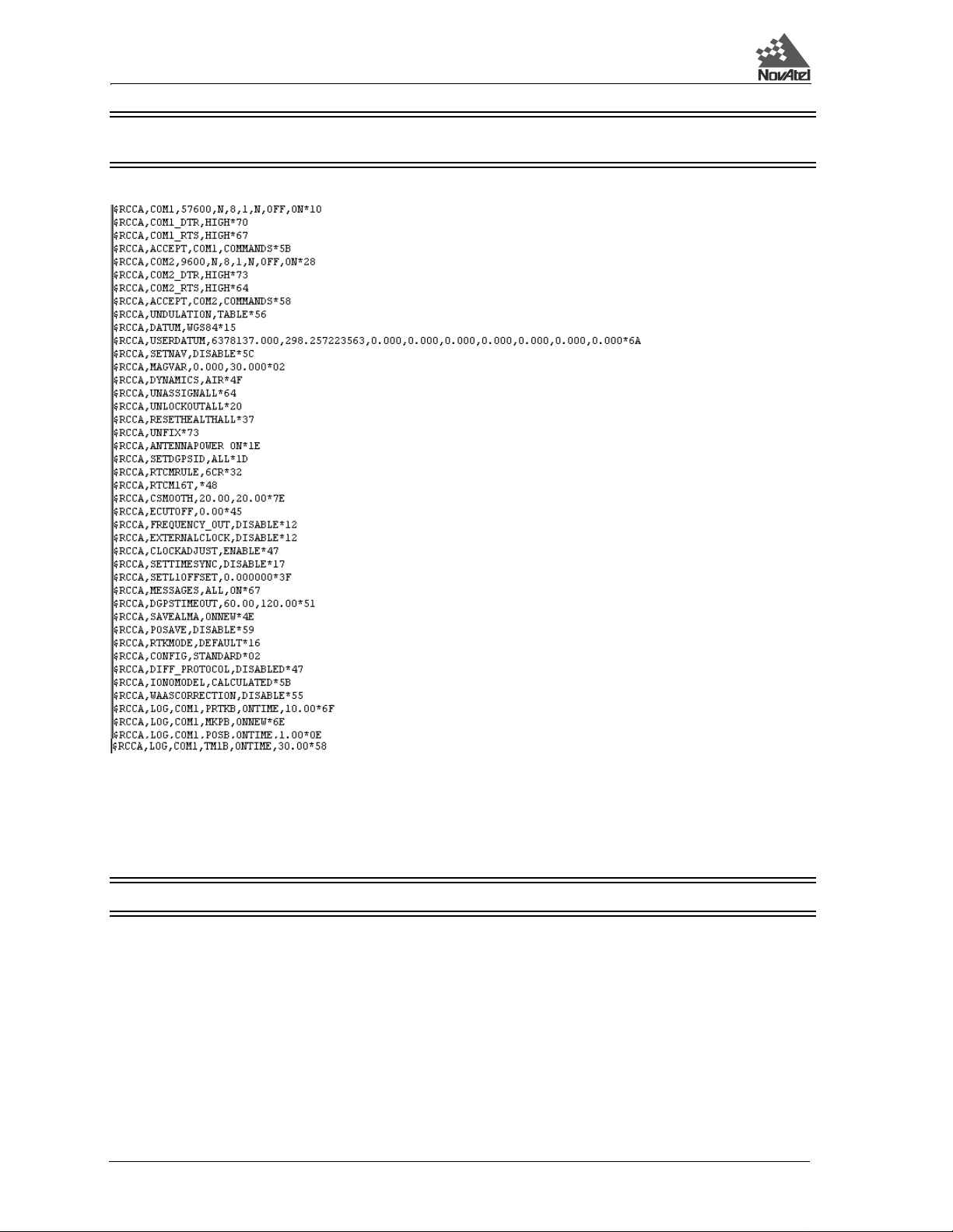
2 Command Descriptions
NOTE: All previously stored configurations that were saved to non-volatile memory are erased (including
Saved Config, Saved Almanac, and Channel Config).
Example:
Optional calculation of the checksum
When an input command is followed by an optional checksum, the checksum will be verified before the command
is executed. The checksum is the result of the logical exclusive-OR operation on all the bits in the message. So,
the checksum of a command with parameters will change if the parameters are modified.
NOTE: The command must be typed in uppercase for the proper checksum to be calculated.
As an example, it may be essential to ensure that a receiver has received and executed the correct command from
a host computer. If the checksum were calculated by the sender and attached to the command, the receiver woul d
be able to recognize if errors had been introduced and if so, alert the sender to this with an “Invalid Command
CRC” message.
Example:
FIX HEIGHT 4.567[CR][LF]
FIX HEIGHT 4.567*66[CR][LF]
Both are acceptable, but only the second one would trigger the verification function.
24 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
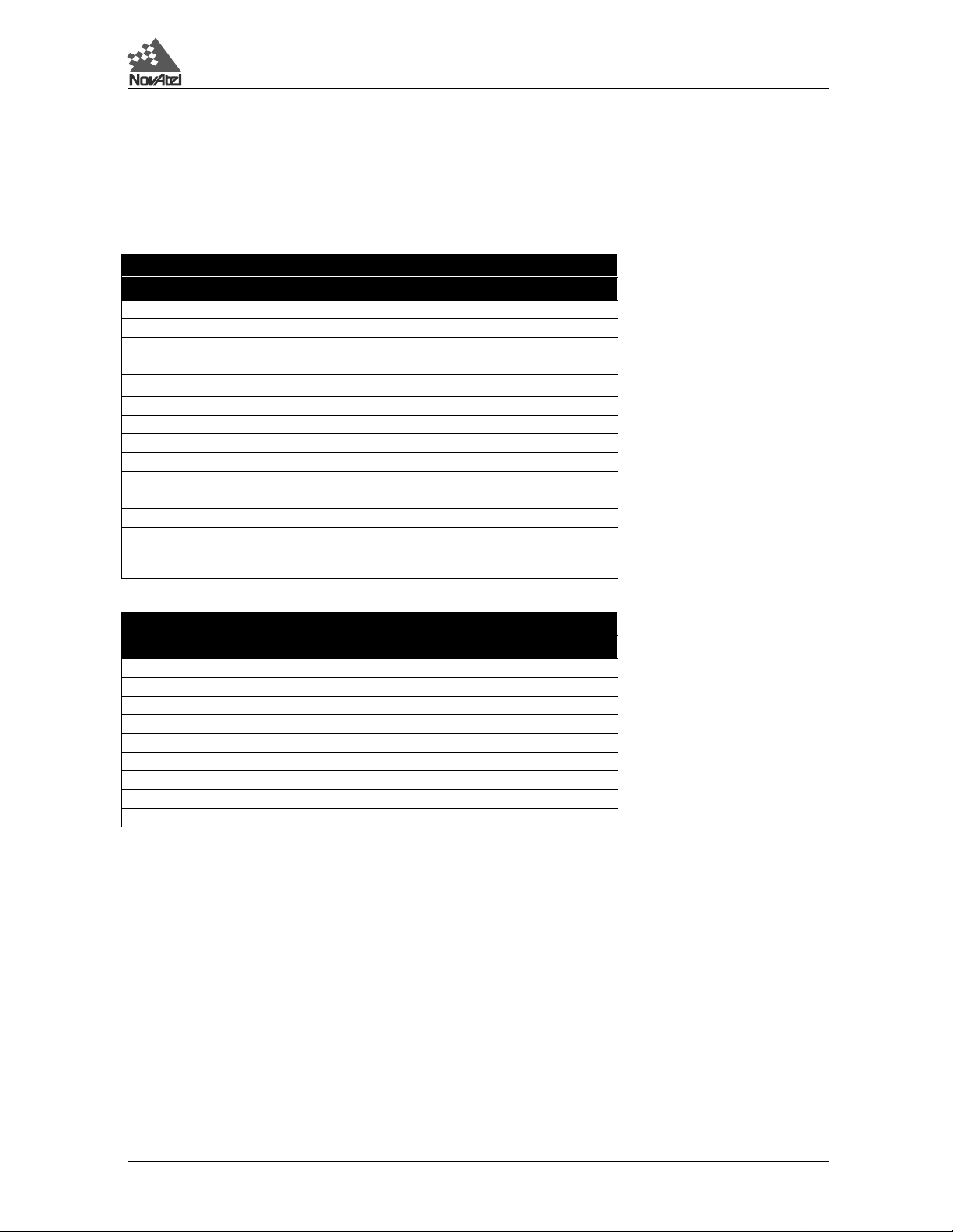
2 Command Descriptions
2.2 STANDARD COMMAND TABLES
Table 2-1 lists the comma nds by function while Table 2-2 is an alphabetical listing of commands. Please see
Appendix C, Page 79 for a more detailed description of individual commands which are listed alphabetically.
Table 2-1 Commands By Function Table
COMMUNICATIONS, CONTROL AND STATUS
Commands Descriptions
ANTENNAPOWER Power to the low-noi se a mplifi er of an active anten na
COMn COMn port configurat ion control
COMn_DTR DTR handshaking con tro l
COMn_RTS RTS handshaking con tro l
DIFF_PROTOCOL
FREQUENCY_OUT Variable frequency output (programmable)
LOG Logging control
MESSAGES Disable error reporting from command interpreter
RINEX Configure the user defined fields in the file header
RTCMRULE Sets up RTCM bit rule
RTCM16T Enters an ASCII message
SEND Sends ASCII message to COM port
SENDHEX Sends non-printable charact e rs
SETL1OFFSET
1 Intended for advanced users of GPS only
1
1
Differential Protocol Cont rol
Add an offset to the L1 pse udorange to compen sat e for
signal delays
GENERAL RECEIVER CONTROL AND STATUS
Commands Descriptions
$ALMA Download alm anac data file
CRESET Reset receiver to factory default
DYNAMICS Set correlator tracking bandwidth
HELP On-line command help
RESET Performs a hardware reset (OEM only)
SAVEALMA Saves the latest almanac in NVM
SAVECONFIG Saves current configuration (OEM only)
$TM1A Injects receiver time of 1PPS
VERSION Software/hardware in form ation
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 25
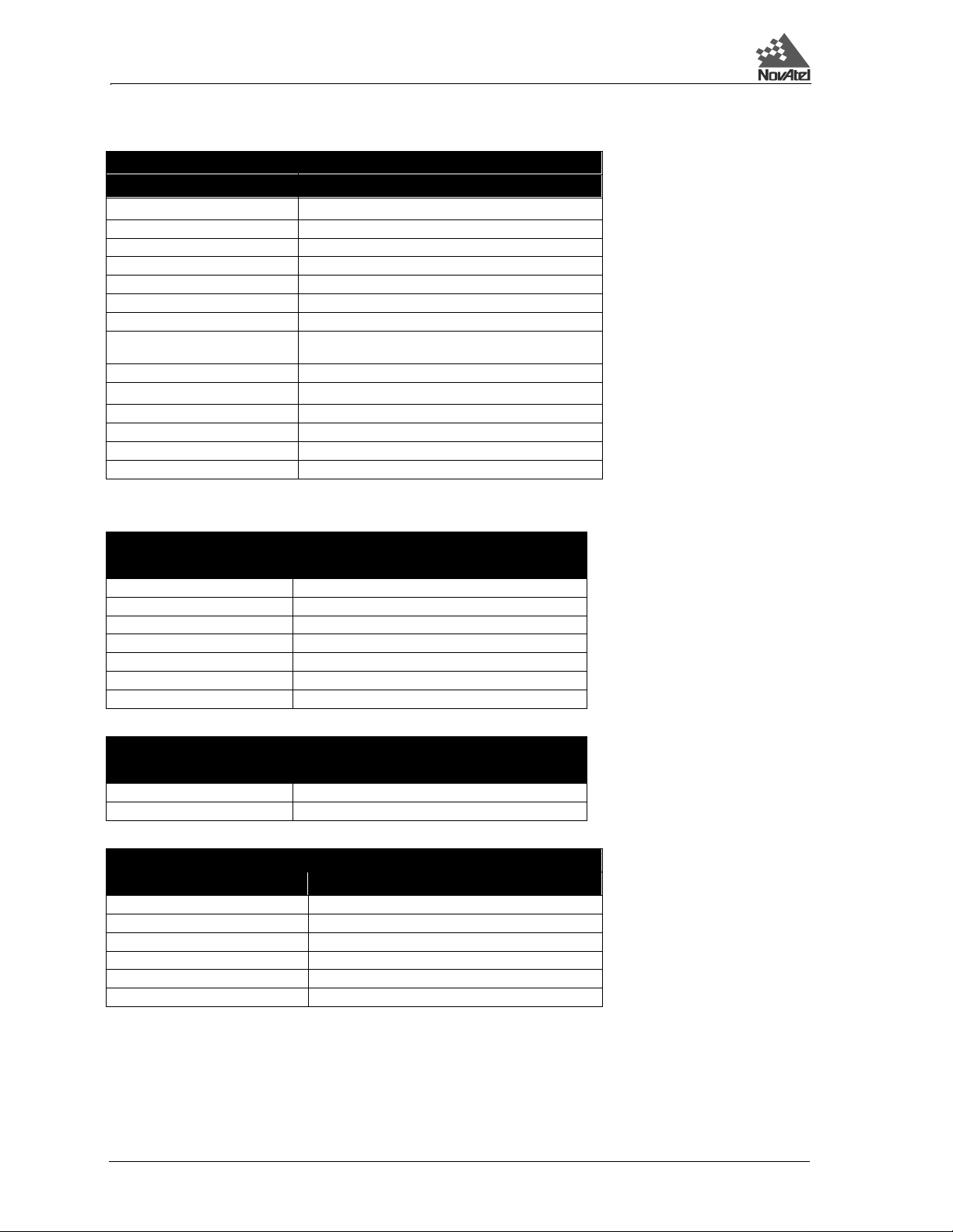
2 Command Descriptions
Table 2-1 Commands By Function Table (continued)
POSITION, PARAMETERS, AND SOLUTION FILTERING CONTROL
Commands Descriptions
CSMOOTH
DATUM Choose a DATUM name type
ECUTOFF Satellite elevation cut-off for solutions
FIX HEIGHT Constra i ns to fi xe d hei ght (2D mode)
FIX POSITION Constrains to fixed lat, lon, height
FRESET Clears all data which is stored in NVM
$IONA Downloa d i onospheric correction data
IONOMODEL
LOCKOUT Deweights a satellite in solutions
$PVAA
RTKMODE Setup the RTK mode
UNDULATION Ellipsoid-geoid separation
USERDATUM User-customized datum
WAASCORRECTION Controls handling of WAAS corrections.
1 Intended for advanced users of GPS only.
1
1
Sets amount of carrie r smoothing
What ionospheric correction to use (MiLLennium with the
WAAS option)
Position, velocity and ac c el era tion in ECEF coordinate s
SATELLITE TRACKING AND CHANNEL CONTROL
Commands Descriptions
$ALMA Download almanac data file
ASSIGN Satellite channel assignment
CONFIG Switches the channel configuration of the GPSCard
DYNAMICS Sets correlator tracking bandwidth
FIX VELOCITY Aids high velocity reacquisition
RESETHEALTH Reset PRN health
SETHEALTH Overrides broadcast satellite he alth
WAYPOINT NAVIGATI ON
Commands Descriptions
MAGVAR Magnetic variation correction
SETNAV Waypoint in put
DIFFERENTIAL REFERENCE STATION
Commands Descriptions
DGPSTIMEOUT Sets ephemeris delay
FIX POSITION Constrain to fixed (refer ence)
LOG Selects required differential-output log
POSAVE Implements position averaging for reference station
RTCMRULE Selects RTCM bit rule
SETDGPSID Set reference station ID
26 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
Table 2-1 Commands By Function Table (continued)
DIFFERENTIAL REMOTE STATION
Commands Descriptions
ACCEPT Accepts RTCM1, RTCA or RTCAB differential inputs
$ALMA Input almanac data
DGPSTIMEOUT Set maximum age of differential data accepted
RESET Performs a hardware reset
$RTCA RTCA differential correction input (ASCII)
$RTCM RTCM differenti al correction input (ASCII)
RTCMRULE Selects RT CM bi t rule
SETDGPSID Select differenti al refe rence station ID to receive
CLOCK INFORMATION, STATUS, AND TIME
Commands Descriptions
CLOCKADJUST Enable clock modelling & 1PPS adjust
1
DIFF_PROTOCOL
EXTERNALCLOCK Sets default parameters of an optional external os ci llator
EXTERNALCLOCK FREQUENCY Sets clock rate
SETTIMESYNC
$UTCA Download UTC data
Differential protocol con tro l
1
Enable or disable time synchron ization
2 Command Descriptions
1 Intended for advanced users of GPS only
Table 2-2 GPSCard Command Summary
Command Description Syntax
$ALMA Injects almanac (follows NovAtel ASCII log format)
$IONA Injects ionospheric refraction corrections (follows NovAtel ASCII log format)
$PVAA Injects latest computed position, velocity and acceleration (follows NovAtel ASCII log format)
$REPA Injects raw GPS ephemeris data (follows NovAtel ASCII log format)
$RTCA Injects RTCA format DGPS corrections in ASCII (Type 1) (follows NovAtel ASCII log format)
$RTCM Injects RTCM format differential corrections in ASCII (Type 1) (follows NovAtel ASCII log format)
$TM1A Injects receiver time of 1 PPS (follows NovAtel ASCII log format)
$UTCA Injects UTC information (follows NovAtel ASCII log format)
ACCEPT Port input control (set command interpreter) accept port,option
ANTENNAPOWER Power to the low-noise amplifier of an active antenna antennapower flag
ASSIGN Assign a prn to a channel # assign channel,prn,doppler, search window
UNASSIGN Un-assign a channel unassign channel
UNASSIGNALL Un-assign all channels unassignall
CLOCKADJUST Disable clock steering mechanism clockadjust switch
COMn Initialize Serial Port (1 or 2) comn bps,parity,databits,stopbits, handshake,echo
COMn_DTR Programmable DTR lead/tail time comn_dtr control,active,lead,tail
COMn_RTS Programmable RTS lead/tail time comn_rts control,active,lead,tail
CONFIG Switches the channel configuration of the GPSCard config cfgtype
CRESET Configuration reset to factory default creset
CSMOOTH Sets carrier smoothing csmooth value
DATUM Choose a DATUM name type datum option
USERDATUM User defined DATUM userdatum semi-major,flattening,dx,dy,dz, rx,ry,rz,
DGPSTIMEOUT Sets maximum age of differential data to be accepted and ephemeris
delay
scale
dgpstimeou t value value
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 27
2 Command Descriptions
DIFF_PROTOCOL Differential correction message encoding and decoding for
DYNAMICS Set receiver dynamics dynamics option [user_dynamics]
ECUTOFF Set elevation cutoff angle ecutoff angle
EXTERNALCLOCK Sets default parameters of an optional external oscillator externalclock option
EXTERNALCLOCK
FREQUENCY
FIX HEIGHT Sets height for 2D navigation fix height height [auto]
FIX POSITION Set antenna coordinates for refe rence station fix position lat,lon,height [station id] [health]
FIX VELOCITY Accepts INS xyz (ECEF) input to aid in high velocity reacquisition of
UNFIX Remove all receiver FIX constraints unfix
FREQUENCY_OUT Variable frequency output (programmable) frequency_out n,k
FRESET Clears all data which is stored in non-volatile memory freset
HELP or ? On-line command help help option or ? option
LOCKOUT Lock out satellite lockout prn
UNLOCKOUT Restore satellite unlockout prn
UNLOCKOUTALL Restore all satellites unlockoutall
LOG Choose data logging type log [port],datatype,[trigger],[period],[offset],{hold}
UNLOG Disable a data log unlog [port],data type
UNLOGALL Disable all data logs unlogall [port
MAGVAR Set magnetic variation correction magvar value
MESSAGES Disable error reporting from command interpreter messages port,option
POSAVE Implements position averaging for reference station posave maxtime, maxhorstd, maxverstd
RESET Performs a hardware reset (OEM only) reset
RINEX Configure the user defined fields in the file headers rinex cfgtype
RTCM16T Enter an ASCII text message to be sent out in the RTCM data stream rtcm16t ascii message
RTCMRULE Set variations of the RTCM bit rule rtcmrule rule
RTKMODE Set up the RTK mode rrtkmode argument, data range
SAVEALMA Save the latest almanac in non-volatile memory savealma option
SAVECONFIG Save current configuration in non-volatile memory (OEM only) saveconfig
SEND Send an ASCII message to any of the communications ports send port ascii-message
SENDHEX Sends non-printable characters in hexadecimal pairs sendhex port data
SETDGPSID Enter in a reference station ID setdgpsid option
SETHEALTH Override PRN health sethealth prn,health
RESETHEALTH Reset PRN health resethealth prn
RESETHEALTHALL Reset all PRN health resethealthall
SETL1OFFSET Add an offset to the L1 pseudorange to compensate for signal delays setL1offset distance
SETNAV Set a destination waypoint setnav from lat,from lon,to lat, to lon,track offset, from
SETTIMESYNC Enable or disable time synchronization settimesync flag
UNDULATION Choose undulation undulation separation
VERSION Current software and hardware information version
implementation in the GPS card firmware
Sets clock rate external frequency clock rate
SVs
diff_protocol type key
or diff_protocol disable
or diff_protocol
fix velocity vx,vy,vz
]
port,to port
28 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1

2 Command Descriptions
G
Integrity data,differential corrections
,
time control, and statu
s
GPS SatelliteConstellationIntegrity
different
i
,and rang
C-ban
d
L2
Statio
n
S
)
rea
2.3 WAAS
The Wide Area Augmentation System (WAAS) is a safety-critical system that provides a quality of positioning
information previously unavailable. The WA AS improves the accuracy, integr ity, and availability of the basic GPS
signals. In the future, the wide area of coverage for this system will include the entire United States and some
outlying areas. At the time of publication, there is one test satellite over the Pacific Ocean and therefore there is
only coverage for the western half of the United States.
The primary functions of WAAS include:
• d ata coll ection
• determining ionospheric corrections
• determining satellite orbits
• determining satellite clock corrections
• determining satellite integrity
• independent data verification
• WAAS message broadcast and ranging
• system operations & maintenance
As shown in Figure 2-2, the WAAS is made up of a series of Wide Area Reference Stations, Wide Area Master
Stations, Ground Uplink Stations and Geostationary Satellites (GEOs). The Wide Area Reference Stations, which
are geographically distributed, pick up GPS satellite data and route it to the Wide Area Master Stations where wide
area corrections are generated. These corrections are sent to the Grou nd Uplink Stations which up-link them to th e
GEOs for re-transmission on the GPS L1 frequency. These GEOs transmit signals which carry accuracy and
integrity messages, and which also provide additional ranging signals for added availability, continuity and
accuracy. These GEO signals are available over a wide area and can be received and processed by ordinary GPS
receivers. GPS user receivers are thus able to re ceive WAAS data in-ban d and use n ot only differential corrections,
but also integrity, residual errors and ionospheric information for each monitored satellite.
GPS User
Figure 2-2 The WAAS Concept
Geostationary
Satellite (GEO)
L1
Wide-area
Refere nce Sta t ion
(WRS)
L1 & C-band
Wide-area
Refere nce Sta t ion
(WRS)
Wide-area
Master Station
(WMS)
L1 &
Wide-a
Reference
(WR
data,
al corrections
ing control
round Uplink
Station
(GUS)
MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1 29

2 Command Descriptions
The signal broadcast via the WAAS GEOs to the WAAS users is designed to minimize modifications to standard
GPS receivers. As such, the GPS L1 frequency (1575.42 MHz) is used, together with GPS-type modulation - e.g.
a Coarse/Acquisition (C/A) pseudorandom (PRN) code. In add ition, th e code phase ti ming is main tained clo se to
GPS time to provide a ranging capability.
2.3.1 WAAS GPSCard
NovAtel has developed several models of WAAS-capable MiLLennium GPSCards that process WAAS signals.
These models can output the WAAS data in log format (FRMA/B, WALA/B), and can incorporate these
corrections to generate differential-quality position solutions. It permits two user-configurable options: 12 GPS (10
Hz position and raw data output rate) or 10 GPS and 1 WAAS L1 channels (2 Hz output). The first configurat ion
is the default. The second is in voked with the CONFIG command (see Pa ge 86) and resets the card. Standard
WAAS data messages are analysed based on RTCA standard DO-229 Change 1 Minimum Operational
Performance Standards for GPS/WAAS airborne equipment.
A WAAS-capable MiLLennium GPSCard will permit anyone within the area of coverage to take advantage of its
benefits. In addition, it has all the features of a MiLLennium GPSCard.
WAAS COMMANDS
Two commands, WAASCORRECTION and IONOMODEL (see their descriptions on Page 135 and Page 103
respectively), enable the use of the WAAS corrections in the position filter. By default they are disabled. In order
to use these commands, first issue the following command to put the GPSCard in WAAS mode:
config waascorr
2.4 SPECIAL DATA INPUT COMMANDS
These entries are data messages that are generated by one GPSCard and sent to another. For example, consider a
special configuration in which a GPSCard #1 is able to send these data messages to a GPSCard #2 via a serial port.
For GPSCard #1, this is no different than sending these data messages to a file or a screen. Each of these data
messages has a special header which is interpreted by GPSCard #2 to mean that the data in that message is to be
used as an update of its own GPS parameters such as time, position, velocity, acceleration or knowledge of satellite
ephemeris.
In this general category also belong the RTCM data messages ($RTCM1A, $R TCM3A, $RTCM9A, $RTCM16A,
and $RTCM59A). These are described in further detail in Chapter 4, Message Formats.
The injection of special command data can take place via
data commands are valid NovAtel ASCII data logs.
The special data commands fall into two categories: Almanac Data and Differential Corrections.
2.4.1 Almanac Data
The GPSCard’s standard features include almanac data collection. Following a cold-start boot-u p or system reset,
the GPSCard will begin a sky search. Once a valid satellite is acquired, the GPSCard will begin almanac
downloading and decoding. This proces s will take at least 12.5 minutes follo wing the cold-start (assum ing there
are no problems with satellite visibility or the antenna system ). It is noted that Ionospheric Correction Data and
UTC data are also collected at the same time as almanac data and will also be available following the 12.5 minutes
collection period mentioned above.
12 channel OEM cards with the
memory. They will also automatically load the last saved almanac following a cold start or a reset. The card will
save an almanac and ionospheric and
memory (NVM), or if the GPS week number of the received data is newer than the week number of the data in
NVM. The save will not occu r until between 12 .5 and 2 5 minutes ha ve elapsed si nce the l ast reset. To check if
almanac data is saved in the NVM of the OEM card, check the "almanac data saved" bit in the receiver status word.
See the description of the
RCSA/B logs, Appendix D, Page 191 for details.
SAVECONFIG option will automatically save almanacs in their non-volatile
UTC data received from a satellite if there is no current data in non-volatile
COM1 or COM2. Remember, the source of these special
30 MiLLennium GPSCard Software Version 4.50 Command Descriptions Manual Rev 1
 Loading...
Loading...