

PC Software and Firmware Chapter 6
4. Select either Ignore or Warn in the File signature verification box.
5. Click on OK to accept the new policy.
6. Click on OK again to close the System Properties dialog.
7. Unplug the NovAtel receiver USB cable, plug it back in and follow the installation instructions
described in either the Windows XP Installation section starting below or the Windows 2000
Installation section starting on Page 111.
6.4.2 Windows XP Installation
If upgrading drivers, uninstall older versions using the NovAtel USB Configuration tool located in the
Start Menu under Program Files | OEMV PC Software. If you have not installed NovAtel USB drivers
before, the NovAtel USB Configuration tool will not be there until you install them.
After connecting the NovAtel GPS receiver to a USB port on the PC, the Found New Hardware
wizard appears.
1. The screens displayed in this section, from Windows XP, may vary from what you see
and depend on your operating system.
2. During the driver installation you may see a Window Logo testing warning if you
skipped the steps in Section 6.4.1,Windows Driver Signing on Page 108. Our USB
drivers are compatible with Microsoft Windows operating systems. Please click on
Continue Anyway if you see a warning like this:
OEMV Family Installation and Operation User Manual Rev 5B 109
Chapter 6 PC Software and Firmware
1. Click on No, not this time and then click on Next.
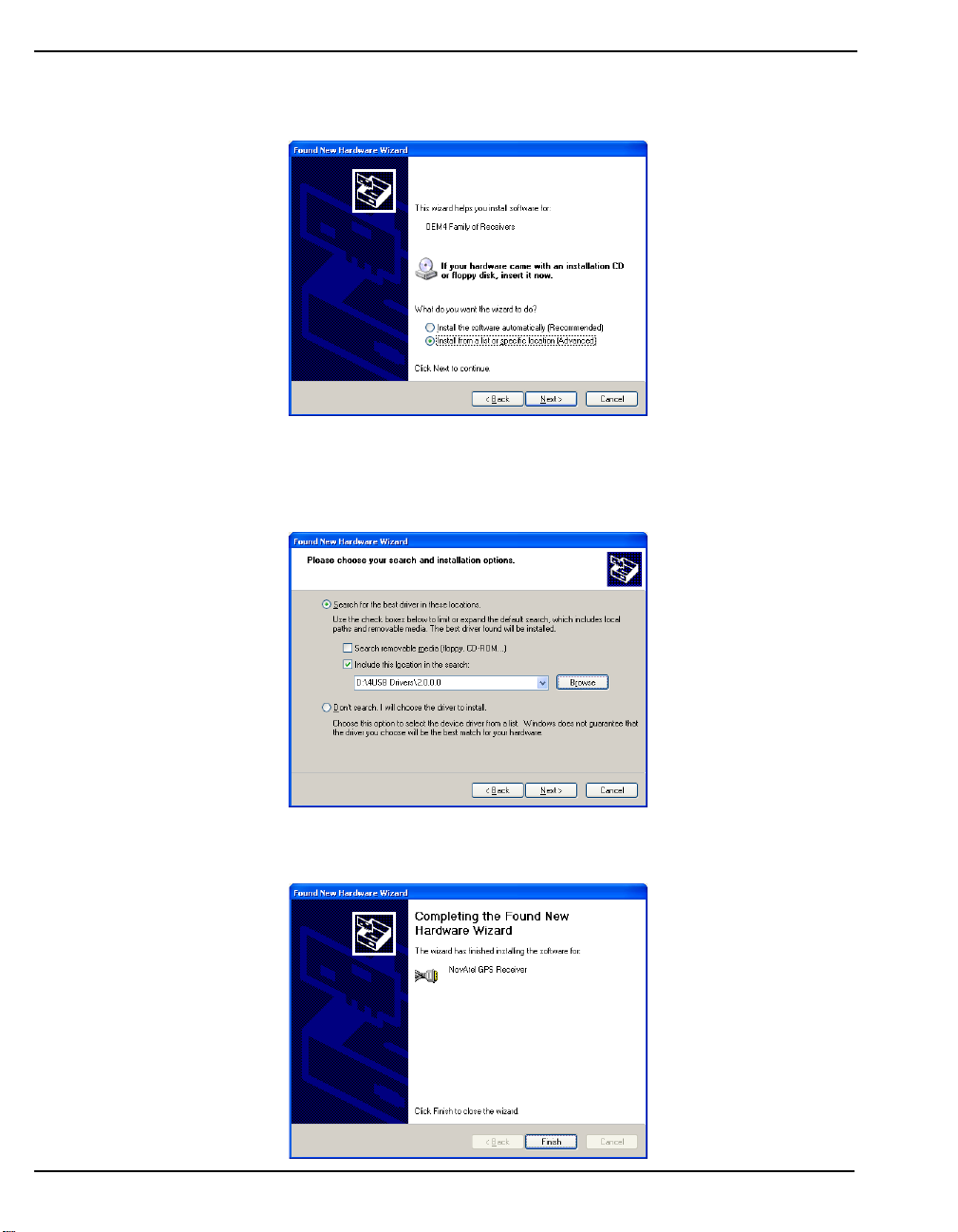
2. Select the Install from a list or specific location (Advanced) field and click on Next.
3. Clear the Search removable media check box, select the Include this location in the search: field
and Browse to the USB driver install directory on the supplied OEMV family CD. Then click on
Next.
4. Click on Finish to complete the driver installation.
110 OEMV Family Installation and Operation User Manual Rev 5B
PC Software and Firmware Chapter 6
After installing the NovAtel USB driver, Windows detects the OEMV-2 or OEMV-3 receiver's new
virtual COM ports and begins to initialize them. As each port is detected, the Found New Hardware
wizard appears.
Complete the following steps for each port:
1. Select the Install the software automatically field (recommended) and click on Next.
2. Click on Finish.
Installation is complete when no more dialogs appear. The new COM ports corresponding to the
receiver's USB1, USB2, and USB3 ports are numbered sequentially following the existing ports in the
PC, and are ready to use with any existing application that communicates with the receiver's COM
ports.
The assignment of COM port numbers is tied to the USB port on the PC. This allows you to
switch receivers without Windows assigning new COM ports. However, if you connect the
receiver to a different USB port, Windows detects the receiver's presence on that USB port
and assigns three new COM port numbers.
6.4.3 Windows 2000 Installation
If upgrading drivers, uninstall older version using NovAtel USB Configuration to ol located in the
Start Menu under Program Files | OEMV PC Software.
After connecting the NovAtel GPS receiver to a USB port on the PC, the Found New Hardware
wizard appears. Click on Next. (see the example screens and notes in Section 6.4.2, Windows XP
Installation starting on Page 109).
1. Select the Search for a suitable driver for my device field and click on Next.
2. Select the Specify a location field and click on Next.
3. Specify the location using the browse button, for example, on the supplied OEMV family CD:
USB Drivers\Install
4. Click on OK.
5. Confirm that the driver found is, for example: \USB Drivers\Install\ngpsusb.inf
OEMV Family Installation and Operation User Manual Rev 5B 111
Chapter 6 PC Software and Firmware
6. Click on Next.
7. Click on Finish to complete the driver installation.
After installing the drivers, Windows detects the NovAtel receiver's new virtual COM ports and
begins to initialize them. Installation is complete when no more dialogs appear. The new COM ports
corresponding to the receiver's USB1, USB2, and USB3 ports are numbered sequentially following
the existing ports in the PC, and are ready to use with any existing application that communicates with
the receiver's COM ports.
The assignment of COM port numbers is tied to the USB port on the PC. This allows you to
switch receivers without Windows assigning new COM ports. However, if you connect the
receiver to a different USB port, Windows detects the receiver's presence on that USB port
and assign three new COM port numbers.
6.5 Firmware Upgrades
The receiver stores its program firmware in non-volatile memory, which allows you to perform
firmware upgrades without having to return the receiver to the distributor. New firmware can be
transferred to the receiver through COM1, and the unit will immediately be ready for operation at a
higher level of performance.
The first step in upgrading your receiver is to contact your local NovAtel dealer. Your dealer will
assist you in selecting the best upgrade option that suits your specific GPS needs. If your needs are
still unresolved after seeing your dealer then you can contact NovAtel directly through any of the
methods described in the Customer Service section, see Page 18, at the beginning of this manual.
When you call, be sure to have available your receiver model number, serial number, and program
revision level. This information can be found by issuing the LOG VERSION command at the port
prompt.
After establishing which new model/revision level would best suit your needs, and ha ving de scribed
the terms and conditions, you will be issued an authorization code (auth-code). The auth-code is
required to unlock the new features according to your authorized upgrade model type.
To upgrade to a higher performance model at the same firmware revision level (for example,
upgrading from an OEMV-3-L1 to an OEMV-3-RT2 on firmware version 3.000), you can use the
AUTH command with the issued auth-code.
If you are upgrading to a higher firmware revision level (for example, upgrading an OEMV-3-RT2
firmware version 3.000 to OEMV-3-RT2 firmware version 3.100), you will need to transfer new
program firmware to the OEMV family receiver using the WinLoad utility program. As W inLoad and
the upgrade file are generally provided in a compressed file format, you will also be given a
decompression password. WinLoad and the upgrade files can be found on NovAtel's FTP site at http:/
/www.novatel.com, or can be sent to you on disk or by e-mail.
Your local NovA tel dealer will prov ide you with all the information that you require to upgrade your
receiver.
112 OEMV Family Installation and Operation User Manual Rev 5B

PC Software and Firmware Chapter 6
6.5.1 Upgrading Using the AUTH Command
The AUTH command is a special input command which authorizes the enabling or unlocking of the
various model features. Use this command when upgrading to a higher performance OEMV family
model available within the same revision level as your current model (for example, upgrading from an
OEMV-3-L1 to an OEMV-3-RT2 on firmware version 3.000). This command only functions in
conjunction with a valid auth-code assigned by Customer Service.
The upgrade can be performed directly from CDU's Command Line Screen, or from any other
communications program. The procedure is as follows:
1) Power-up the OEMV family receiver and establish communications over a serial port (see
Chapter 4, Operation on Page 56)
2) Issue the LOG VERSION command to verify the current firmware model number, revision level,
and serial number.
3) Issue the AUTH command, followed by the auth-code and model type. The syntax is as follows:
Syntax:
auth auth-code
where auth is a special command which allows program model upgrades
auth-code is the upgrade authorization code, expressed as hhhh,hhhh,hhhh,hhhh,hhhh,model# where
the h characters are an ASCII hexadecimal code, and the model# would be ASCII text
Example:
auth 17cb,29af,3d74,01ec,fd34,l1l2lrvrt2
Once the AUTH command has been executed, the OEMV family receiver will reboot itself. Issuing
the LOG VERSION command will confirm the new upgrade model type and version number.
If communicating using CDU, the communication path needs to be closed and re-opened using the
Device menu.
6.5.2 Updating Using the WinLoad Utility
WinLoad is required (instead of the AUTH command) when upgrading previously released firmware
with a newer version of program and model firmware (for example, upgrading an OEMV-3-RT2
firmware version 3.000 to OEMV-3-RT2 firmware version 3.100). WinLoad is a Windows utility
program designed to facilitate program and model upgrades. Once WinLoad is installed and running,
it will allow you to select a host PC serial port, bit rate, directory path, and file name of the new
program firmware to be transferred to the OEMV family receiver via its COM1, COM2 or COM3
port. The port chosen must have an RS-232 interface to the PC.
Transferring Firmware Files
To proceed with your program upgrade, you must first acquire the latest firmware revision. You will
need a file with a name such as OEMXXXX.EXE (where XXXX is the firmware revision level). This
file is available from NovAtel's FTP site (http://www.novatel.com
(support@novatel.ca). If transferring is not possible, the file can be mailed to you on floppy disk. For
), or via e-mail
OEMV Family Installation and Operation User Manual Rev 5B 113

Chapter 6 PC Software and Firmware
more information on how to contact NovAtel Customer Service please see Page 18 at the beginning
of this manual.
You will need at least 1 MB of available space on your hard drive. For convenience, you may wish to
copy this file to a GPS sub-directory (for example, C:\GPS\LOADER).
The file is available in a compressed format with password protection; Customer Service will provide
you with the required password. After copying the file to your computer, it must be decompressed.
The syntax for decompression is as follows:
Syntax:
[filename] [password]
where filename is the name of the compressed file (but not including the .EXE extension) and
password is the password required to allow decompression
Example:
oem1001 12345678
A windows-based dialog box is provided for password entry.
The self-extracting archive will then generate the following files:
WinLoad.exe WinLoad utility program
HowTo.txt Instructions on how to use the WinLoad utility
WhatsNew .txt Information on the changes made in the firmware since the last revision
XXXX.hex Firmware version upgrade file, where XXXX = program version level (for
example, 1001.hex)
Using the WinLoad Utility
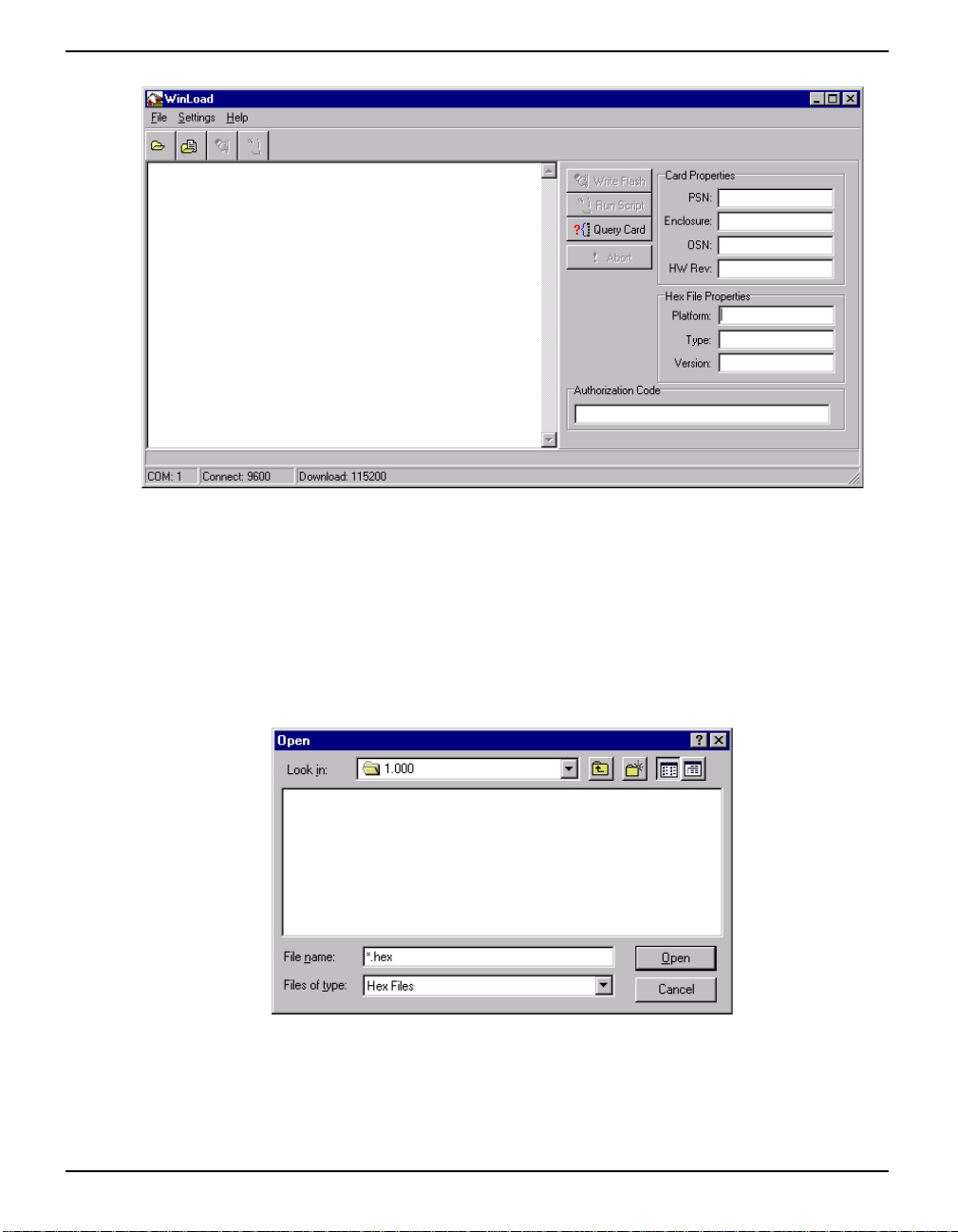
WinLoad is a windows based program used to download firmware to OEMV family cards. The main
screen is shown in Figure 35.
114 OEMV Family Installation and Operation User Manual Rev 5B
PC Software and Firmware Chapter 6
Figure 35: Main Screen of WinLoad
If you are running WinLoad for the first time you will need to make sure the file and communications
settings are correct.
Open a File to Download
From the file menu choose Open. Use the Open dialog to browse for your file, see Figure 36,
WinLoad’s Open Dialog on Page 115.
Figure 36: WinLoad’s Open Dialog
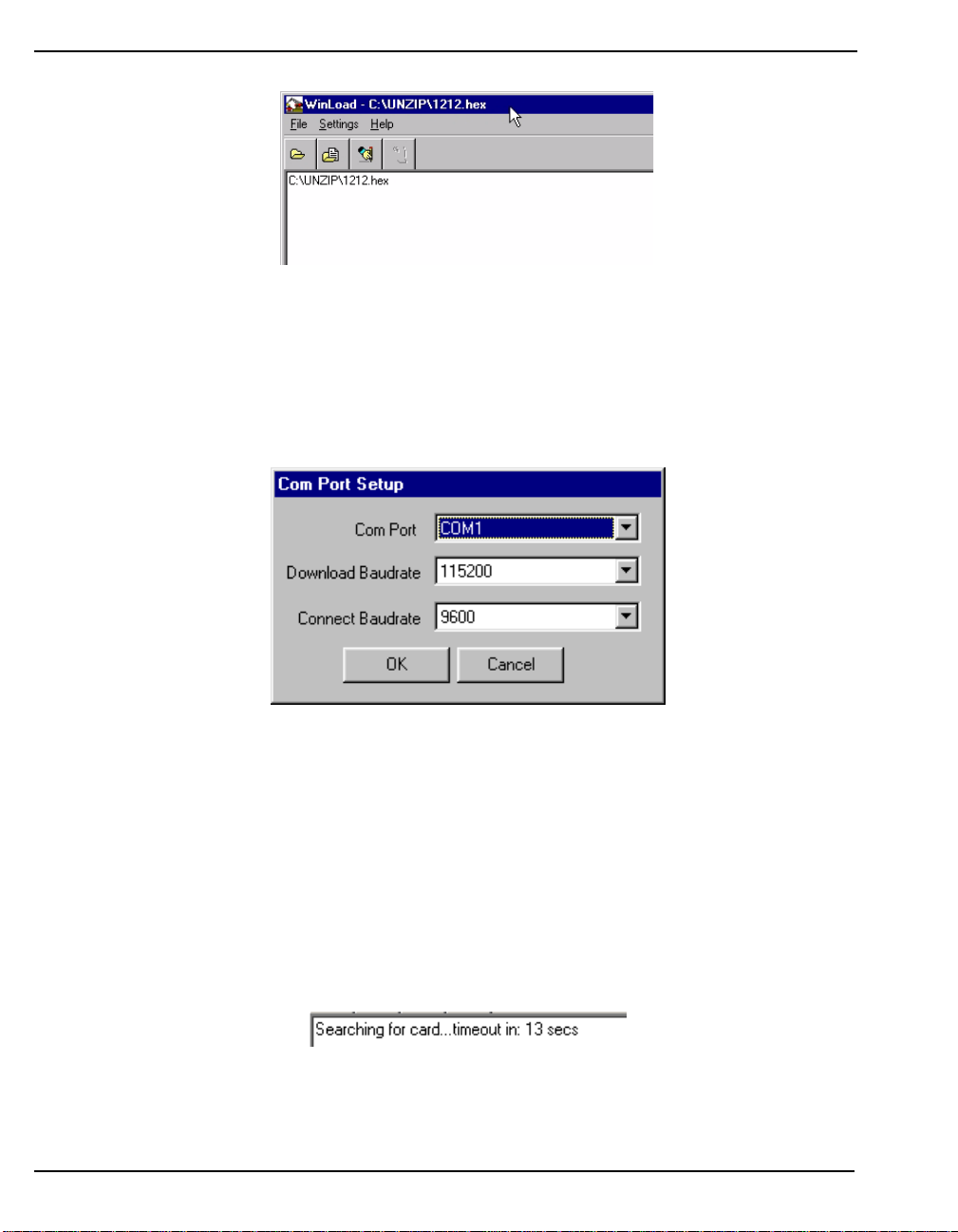
Once you have selected your file, the name should appear in the main display area and in the title bar,
see Figure 37 below.
OEMV Family Installation and Operation User Manual Rev 5B 115
Chapter 6 PC Software and Firmware
Figure 37: Open File in WinLoad
Communications Settings
To set the communications port and baud rate, select COM Settings from the Settings menu. Choose
the port on your PC from the Com Port dropdown list and the baud rate from the Download Baudrate
dropdown list. The baud rate should be as high as possible (the default of 115200 is preferred).
Figure 38: COM Port Setup
Downloading firmware
T o download firmware follow these steps:
1. Set up the communications port as described in Communications Settings above.
2. Select the file to download, see Open a File to Download on Page 115.
3. Make sure the file path and file name are displayed in main display area, see Figure 37, Open File
in WinLoad on Page 116.
4. Click on the Write Flash button to download the firmware.
5. Power down and then power up the receiver when “Searching for card” appears in the main display, see Figure 39.
Figure 39: Searching for Card
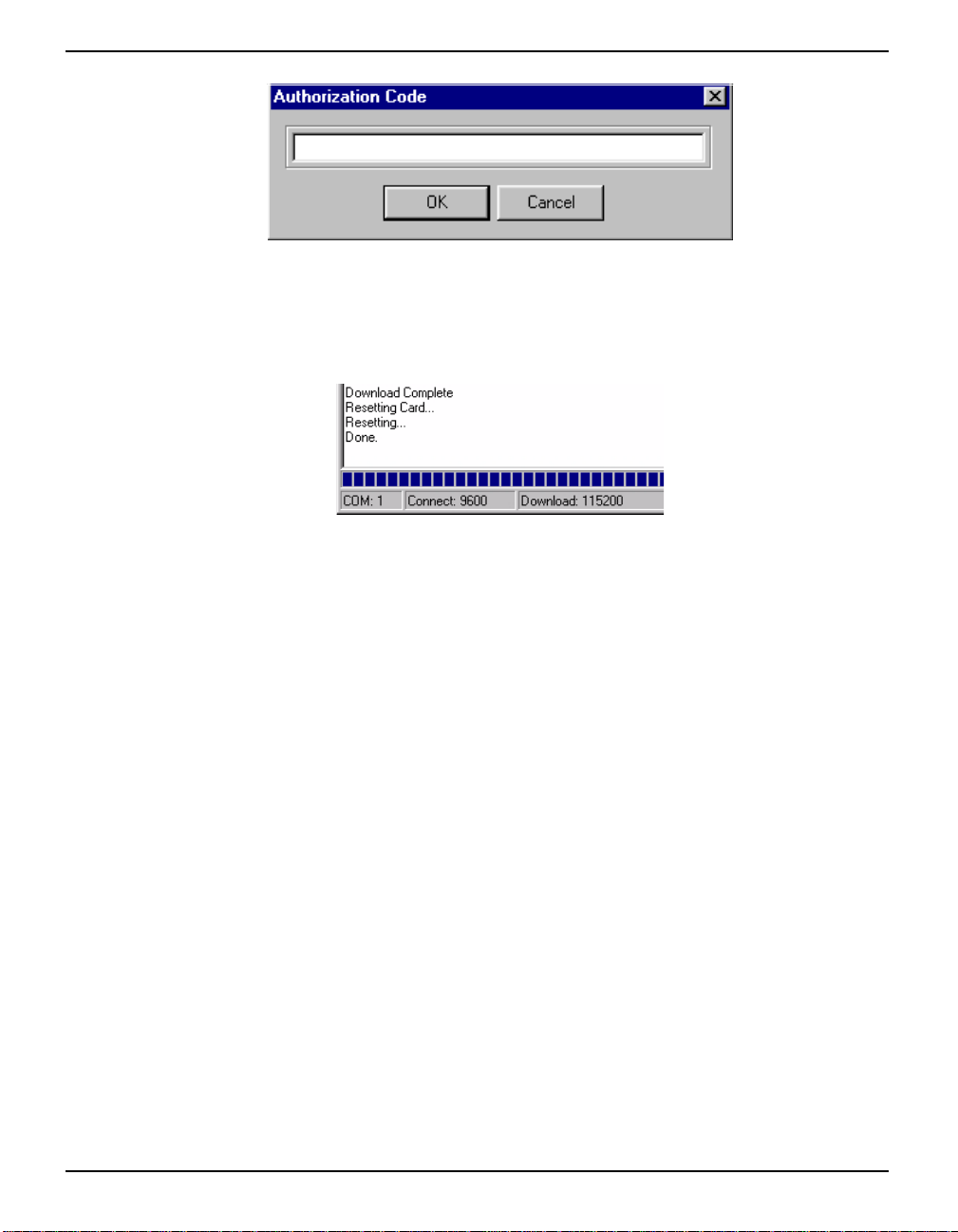
6. When the Authorization Code dialog opens, see Figure 40, enter the auth code and select OK
116 OEMV Family Installation and Operation User Manual Rev 5B
PC Software and Firmware Chapter 6
Figure 40: Authorization Code Dialog
7. The receiver should finish downloading and reset. The process is complete when “Done.” is dis-
played in the main display area, see Figure 41.
Figure 41: Upgrade Process Complete
8. Close WinLoad.
This completes the procedure required to upgrade an OEMV family receiver.
OEMV Family Installation and Operation User Manual Rev 5B 117

Chapter 7 Built-In Status Tests
7.1 Overview
The built in test monitors system performance and status to ensure the receiver is operating within its
specifications. If an exceptional condition is detected, the user is informed through one or more
indicators. The receiver status system is used to configure and monitor these indicators:
1. Receiver status word (included in the header of every message)
2. ERROR strobe signal (see Section 3.3.1, Strobes on Page 44 )
3. RXSTATUSEVENT log
4. RXSTATUS log
5. Status LED
In normal operation the error strobe is driven low and the status LED on the receiver flashes green.
When an unusual and non-fatal event occurs (for example, there is no valid position solution), a bit is
set in the receiver status word. Receiver operation continues normally, the error strobe remains off,
and the LED continues to flash green. When the event ends (for example, when there is a valid
position solution), the bit in the receiver status word is cleared.
When a fatal event occurs (for example, in the event of a receiver hardware failure), a bit is set in the
receiver error word, part of the RXST ATUS log, to indicate the cause of the problem. Bit 0 is set in the
receiver status word to show that an error occurred, the error strobe is driven high, and the LED
flashes red and yellow showing an error code. An RXSTATUSEVENT log is generated on all ports to
show the cause of the error. Receiver tracking is disabled at this point but command and log
processing continues to allow you to diagnose the error. Even if the source of the error is corrected at
this point, the receiver must be reset to resume normal operation.
The above two paragraphs describe factory default behavior. Customizing is possible to better suit an
individual application. RXSTATUSEVENT logs can be disabled completely using the UNLOG
command. RXSTATUSEVENT logs can be generated when a receiver status bit is set or cleared by
using the STATUSCONFIG SET and STATUSCONFIG CLEAR commands. Bits in the receiver
status word can also be promoted to be treated just like error bits using the STATUSCONFIG
PRIORITY command.
7.2 Receiver Status Word
The receiver status word indicates the current status of the receiver. This word is found in the header
of all logs and in the RXSTATUS log. In addition the receiver status word is configurable.
The receiver gives the user the ability to determine the importance of the status bits. This is done using
the priority masks. In the case of the Receiver Status, setting a bit in the priority mask will cause the
condition to trigger an error. This will cause the receiver to idle all channels, turn off the antenna, and
disable the RF hardware, the same as if a bit in the Receiver Error word is set. Setting a bit in an
Auxiliary Status priority mask will cause that condition to set the bit in the Receiver Status word
corresponding to that Auxiliary Status.
The STATUSCONFIG command is used to configure the various status mask fields in the
118 OEMV Family Installation and Operation User Manual Rev 5B

Built-In Status Tests Chapter 7
ord
RXSTATUSEVENT log. These masks allow you to modify whether various status fields generate
errors or event messages when they are set or cleared. This is meant to allow you to customize the
operation of your OEMV family receiver for your specific needs.
Refer to the RXSTATUS log, RXSTATUSEVENT log and STATUSCONFIG command in the OEMV
Firmware Reference Manual for more detailed descriptions of these messages.
7.3 Error Strobe Signal
The error strobe signal is one of the I/O strobes and is driven low when the receiver is operating
normally . When the receiver is in the error state and tracking is disabled, the error strobe is driven
high. This can be caused by a fatal error or by an unusual receiver status indication that the user has
promoted to be treated like a fatal error. Once on, the error status will remain high until the cause of
the error is corrected and the receiver is reset. See also Section 3.3.1, Strobes on Page 44.
7.4 RXSTATUSEVENT Log
The RXSTATUSEVENT log is used to output event messages as indicated in the RXSTATUS log.
On start-up, the OEMV family receiver is set to log the RXSTATUSEVENTA log ONNEW on all
ports. You can remove this message by using the UNLOG comm a nd.
Refer to the RXSTATUSEVENT log in the OEMV Firmware Reference Manual for a more detailed
description of this log.
7.5 RXSTATUS Log
7.5.1 Overview
The Receiver Status log (RXSTATUS) provides information on the current system status and
configuration in a series of hexadecimal words.
The status word is the third field after the header, as shown in the example below.
<RXSTATUS COM1 0 92.0 UNKNOWN 0 154.604 005c0020 643c 1899
< 00000000 4
< 005c0020 00000000 00000000 00000000
< 00000087 00000008 00000000 00000000
< 00000000 00000000 00000000 00000000
< 00000000 00000000 00000000 00000000
Receiver
Status
W
Figure 42: Location of Receiver Status Word
OEMV Family Installation and Operation User Manual Rev 5B 119
Chapter 7 Built-In Status T ests
0
0020 643
899
ord
Each bit in the status word indicates the status of a specific condition or function of the receiver . If the
status word is
Figure 43, Reading the Bits in the Receiver Status Word on Page 120 below.
00000000, the receiver is operating normally. The numbering of the bits is shown in
0 0 0 4 0 0 2 8
0000 0000 0000 0100 0000 0000 0010 1000
Bit 31
Figure 43: Reading the Bits in the Receiver Status Word
If the receiver status word indicates a problem, please also see Section 8.1, Examining the RXST ATUS
Log on Page 126.
Bit
7.5.2 Error Word
The error field contains a 32 bit word. Each bit in the word is used to indicate an error condition. Error
conditions may result in damage to the hardware or erroneous data, so the receiver is put into an error
state. If any bit in the error word is set, the receiver will set the error strobe line, flash the error code on
the status LED, broadcast the RXSTATUSEVENT log on all ports (unless the user has unlogged it),
idle all channels, turn off the antenna, and disable the RF hardware. The only way to get out of the
error state is to reset the receiver.
It is also possible to have status conditions trigger event messages to be generated by the receiver.
Receiver Error words automatically generate event messages. These event messages are output in
RXSTATUSEVENT logs (see also Section 7.5.6, Set and Clear Mask for all Status Code Arrays on
Page 122).
The error word is the first field after the log header in the RXSTATUS log, as shown in the example
below, or the third from last field in the header of every log.
<RXSTATUS COM1 0 92.0 UNKNOWN 0 154.604 005c
< 00000000 4
< 005c0020 00000000 00000000 00000000
< 00000087 00000008 00000000 00000000
< 00000000 00000000 00000000 00000000
Receiver
< 00000000 00000000 00000000 00000000
Error
W
c 1
Figure 44: Location of Receiver Error Word
120 OEMV Family Installation and Operation User Manual Rev 5B

Built-In Status Tests Chapter 7
0
5
Here is another example of a receiver error word. The numbering of the bits is shown in Figure 45.
0 0 0 0 0 0 2 2
0000 0000 0000 0000 0000 0000 0010 0010
Bit 1
Figure 45: Reading the Bits in the Receiver Error Word
Refer to the RXST ATUS and the RXST ATUSEVENT logs in the OEMV Firmware Refer ence Manual
for more detailed descriptions of these logs. If the receiver error word indicates an error, please also
see Section 8.1, Table 23, Resolving a Receiver Error Word on Page 126.
Bit
7.5.3 Status Code Arrays
There are 4 status code arrays – the receiver status word, the auxiliary 1 status, the auxiliary 2 status
and the auxiliary 3 status. Each status code array consists of 4, 32 bit words (the status word, a priority
mask, a set mask and a clear mask). The status word is similar to the error word, with each of the 32
bits indicating a condition. The mask words are used to modify the behavior caused by a change in
one of the bits in the associated status words. Each bit in any of the masks operates on the bit in the
same position in the status word. For example setting bit 3 in the priority mask changes the priority of
bit 3 in the status word.
7.5.4 Receiver Status Code
The receiver status word is included in the header of all logs. It has 32 bits, which indicate certain
receiver conditions. If any of these conditions occur, a bit in the status word is set. Unlike the error
word bits the receiver will continue to operate, unless the priority mask for the bit has been set. The
priority mask bit will change that of the receiver status word into an error bit. Anything that would
result from an error bit becoming active would also occur if a receiver status and its associated priority
mask bits are set.
7.5.5 Auxiliary Status Codes
The auxiliary status codes are only seen in the RXSTATUS log. The three arrays representing the
auxiliary status codes give indication about the receiver state for information only. The events
represented by these bits typically do not cause degradation of the receiver performance. The priority
mask for the auxiliary codes does not put the receiver into an error state. Setting a bit in the auxiliary
priority mask results in the corresponding bit in the receiver status code to be set if any masked
auxiliary bit is set. Bit 31 of the receiver status word indicates the condition of all masked bits in the
auxiliary 1 status word. Likewise, bit 30 of the receiver status word corresponds to the auxiliary 2
status word, and bit 29 to the auxiliary 3 status word.
Refer also to the RXSTATUS log in the OEMV Firmware Reference Manual for a more detailed
description of this log.
OEMV Family Installation and Operation User Manual Rev 5B 121
Chapter 7 Built-In Status T ests
7.5.6 Set and Clear Mask for all Status Code Arrays
The other two mask words in the status code arrays operate on the associated status word in the same
way . These mask words are used to configure which bits in the status word will result in the broadcast
of the RXSTATUSEVENT log. The set mask is used to turn logging on temporarily while the bit
changes from the 0 to 1 state. The clear mask is used to turn logging on temporarily while the bit
changes from a 1 to a 0 state. Note the error word does not have any associated mask words. Any bit
set in the error word will result in the broadcast of the RXSTATUSEVENT log (unless unlogged).
Refer also to the RXSTATUSEVENT log in the OEMV Firmware Reference Manual for a more
detailed description.
7.6 Status LEDs
7.6.1 OEMV Cards
The diagnostic LED provided on the OEMV famil y cards blinks green on and off at approximately 1
Hz to indicate normal operation.
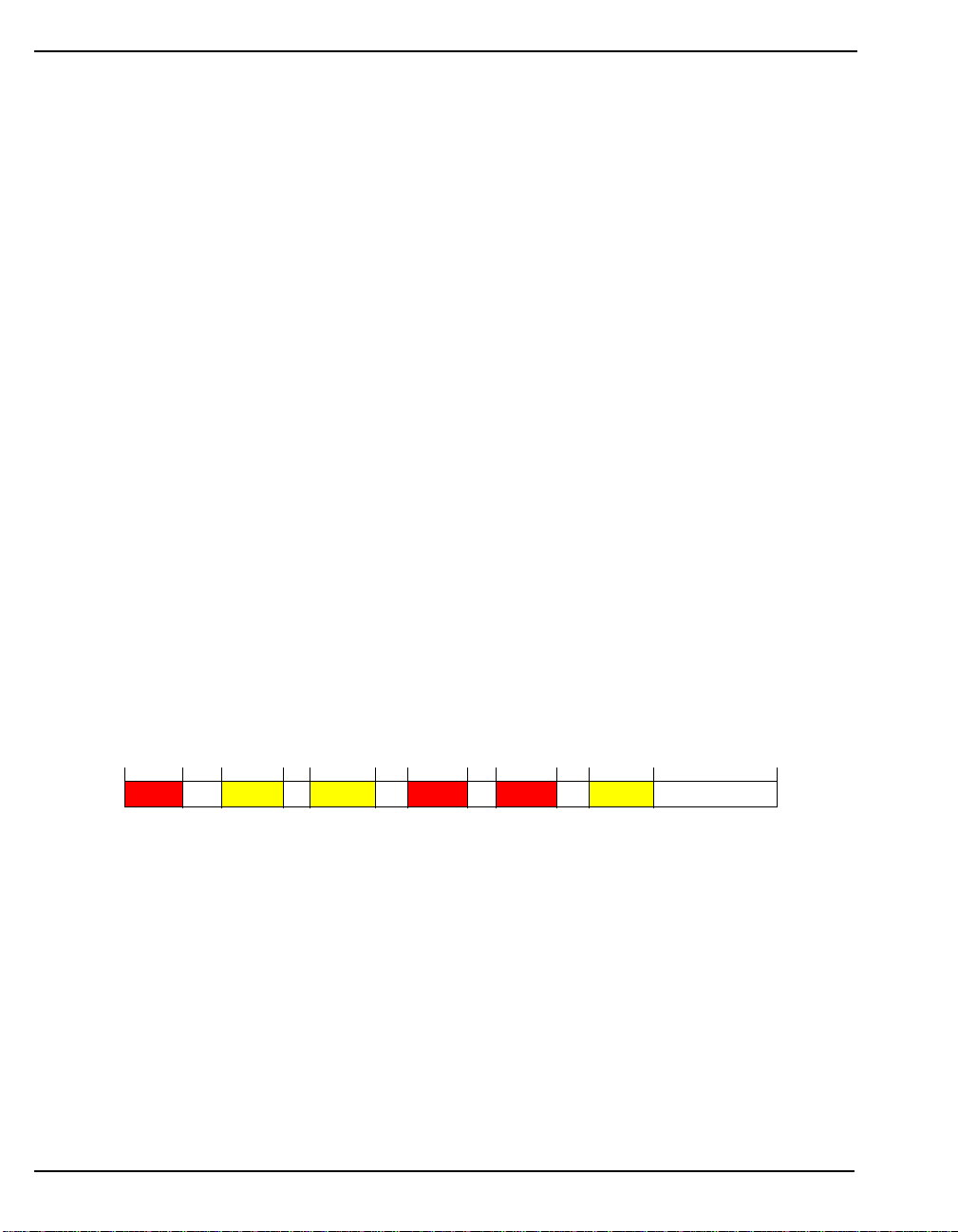
Error bits and status bits that have been priority masked, as errors, will cause the LED to flash a code
in a binary sequence. The binary sequence will be a 6 flash (0.5 second on and 0.25 second off per
flash) sequence followed by a 1 second delay. The sequence will repeat indefinitely. If there is more
than one error or status present, the lowest number will be output. The codes are ordered to have the
highest priority condition output first.
The first flash in the 6 flash sequence indicates if the code that follows is an error bit or a status bit.
Error bits will flash red and status bits will flash yellow. The next 5 flashes will be the binary number
of the code (most significant bit first). A red flash indicates a one and a yellow flash indicates a zero.
For example, for an error bit 6, the binary number is 00110 so the output sequence would be:
0 0.5 0.75 1.25 1.50 2.0 2.25 2.75 3.0 3.5 3.75 4.25 5.25
Red Yellow Yellow Red Red Yellow
followed by a 1 second delay. The sequence repeats indefinitely until the receiver is reset.
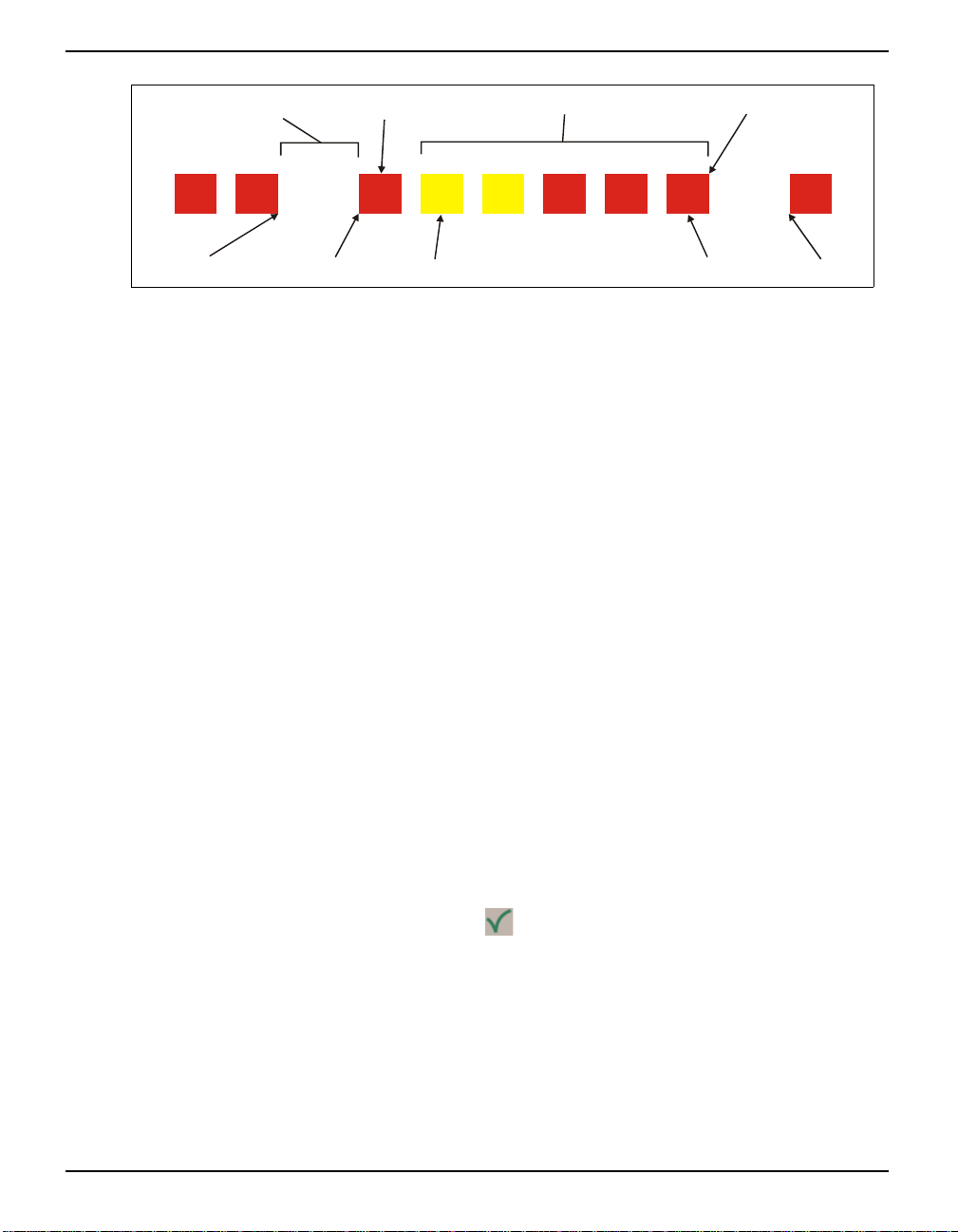
In the example on Page 123, the first flash in the sequence is red, which means that a bit is set in the
receiver error word. The next five flashes give a binary value of
decimal results in a value of
problem with the supply voltage of the receiver’s power circuitry.
7. Therefore, bit 7 of the receiver error word is set, indicating there is a
00111. Converting this value to
122 OEMV Family Installation and Operation User Manual Rev 5B
Built-In Status Tests Chapter 7
.
5
3
...
1
Reference Description
1Red
2 Yellow
3 1 Second Pause
4 Word Identifier Flash
5 Bit Identifier Flashes
6 End of Sequence
7 End of Previous Sequence
8 Beginning of Sequence
1
7
8
Figure 46: Status LED Flash Sequence Example
10
6
..
1
11
4
1
2
2
1
1
1
9
9 Most Significant Bit of Binary Value
10 Least Significant Bit of Binary Value
11 Start of Next Sequence
For a complete hexadecimal to binary conversion list, refer to the Unit Conversion section of the
GPS+ Reference Manual. Refer also to the RXSTATUS log, and its tables for more details on this log
and receiver error status.
7.6.2 DL-V3 Enclosure
The status LED on the front of DL-V3, with the icon, is described in Section 3.3.5, DL-V3 Status
Indicators on Page 48.
OEMV Family Installation and Operation User Manual Rev 5B 123
Chapter 8 Troubleshooting
When your receiver appears not to be working properly, often there are simple ways to diagnose and
resolve the problem. In many cases, the issue can be resolved within a few minutes, avoiding the
hassle and loss of productivity that results from having to return your receiver for repair. This chapter
is designed to assist you in troubleshooting problems that occur and includes navigational instructions
to bring you to the part of this manual that details resolutions to aid your receiver’s operation.
If you are unsure of the symptoms or if the symptoms do not match any of those listed, use the
RXSTATUS log to check the receiver status and error words. See Section 8.1, Examining the
RXSTATUS Log, Page 126.
If the problem is not resolved after using this troubleshooting guide, contact NovAtel Customer
Service, see Page 18.
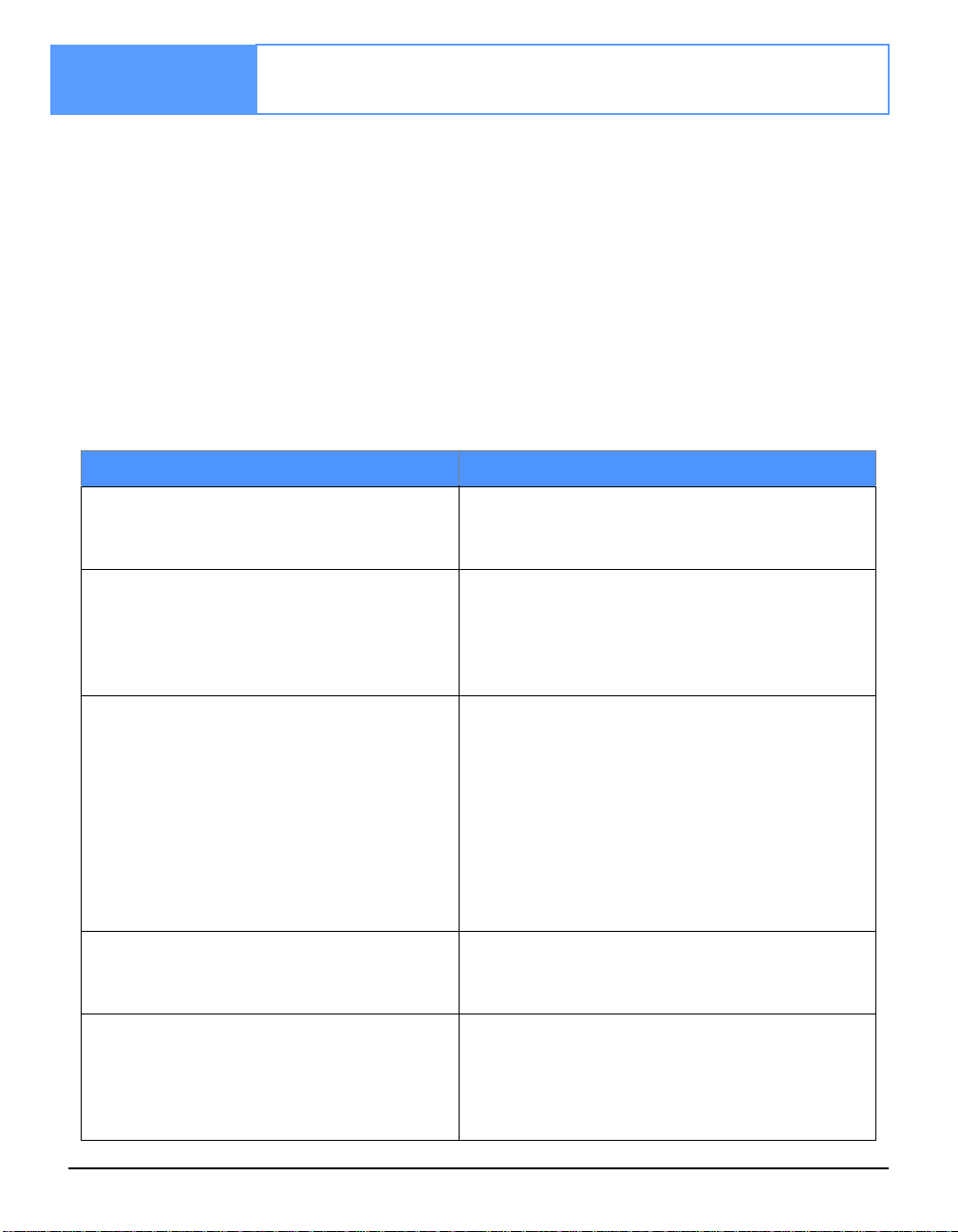
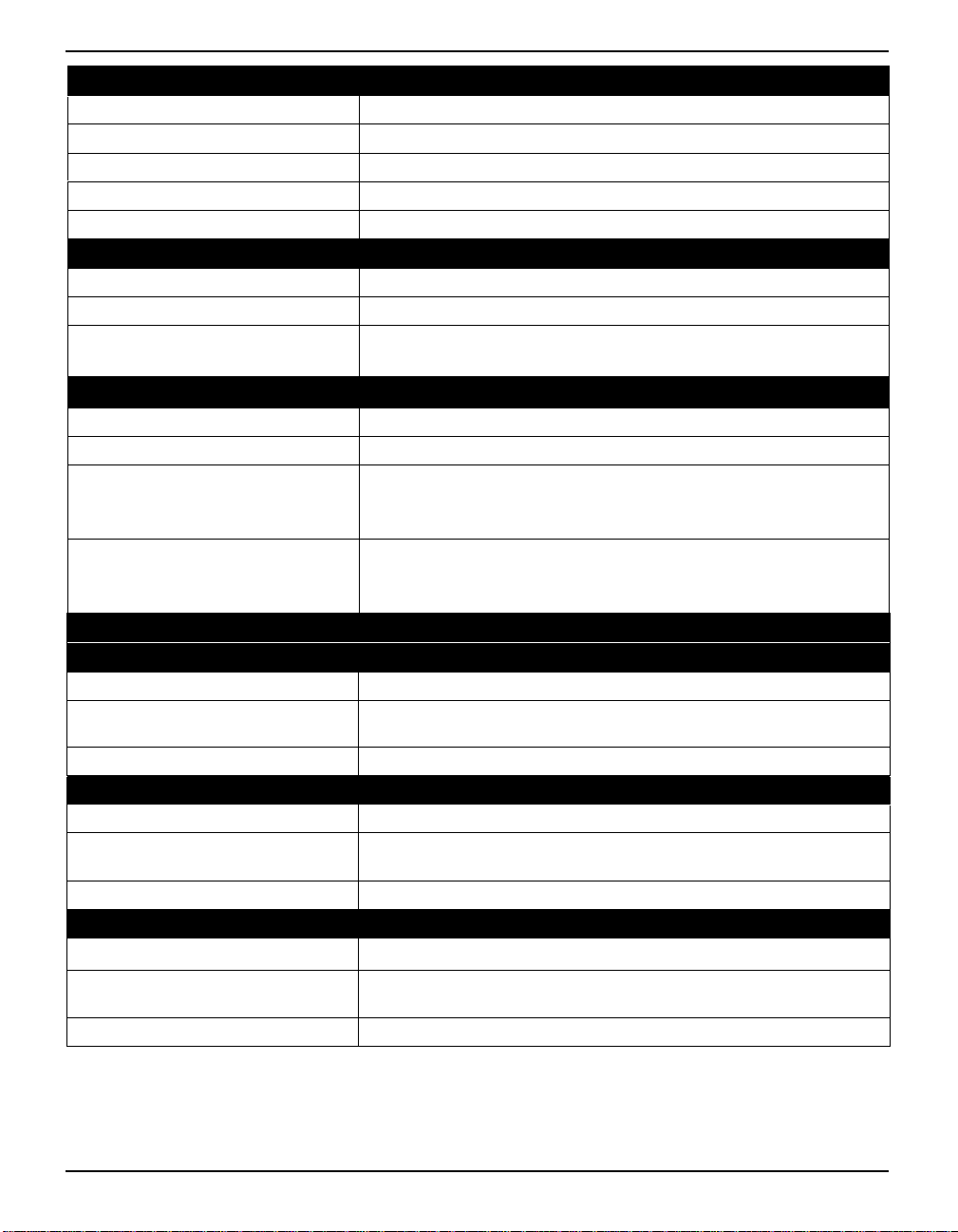
Table 22: Troubleshooting based on Symptoms
Symptom Related Section
The receiver is not properly powered Check for and switch a faulty power cable.
See Section 3.1.3, Power Supply Requirements,
Page 34 and Section 3.3.3, CAN Bus, Page 46.
The receiver cannot establish communication Check for and switch faulty serial cables and ports.
See Section 3.3.3, CAN Bus, Page 46 and
Section 7.6, Status LEDs, Page 122. Refer also to
the COMCONFIG log in the OEMV Firmware
Reference Manual.
The receiver is not tracking satellites Ensure you have an unobstructed view of the sky
from horizon to horizon.
Check for and replace a faulty antenna cable.
See Section 3.1.1, Selecting a GNSS Antenna,
Page 33, Section 3.1.2, Choosing a Coaxial Cable,
Page 34, Section 3.2.4, Connecting the Antenna to
the Receiver, Page 40, Section 3.3.7, Antenna
LNA Power, Page 51 and
refer to the Time to
First Fix and Satellite Acquisition section of the
GPS+ Reference Manual
No data is being logged See Section 3.3.3, CAN Bus, Page 46, and
Section 4.1, Communications with the Receiver,
Page 57.
Random data is being output by the receiver,
or binary data is streaming
Continued on Page 125
Check the baud rate on the receiver and in the
communication software. Refer to the
COMCONFIG log and FRESET command in the
OEMV Firmware Manual.
See also Section 3.3.3, CAN Bus, Page 46.
.
124 OEMV Family Installation and Operation User Manual Rev 5B
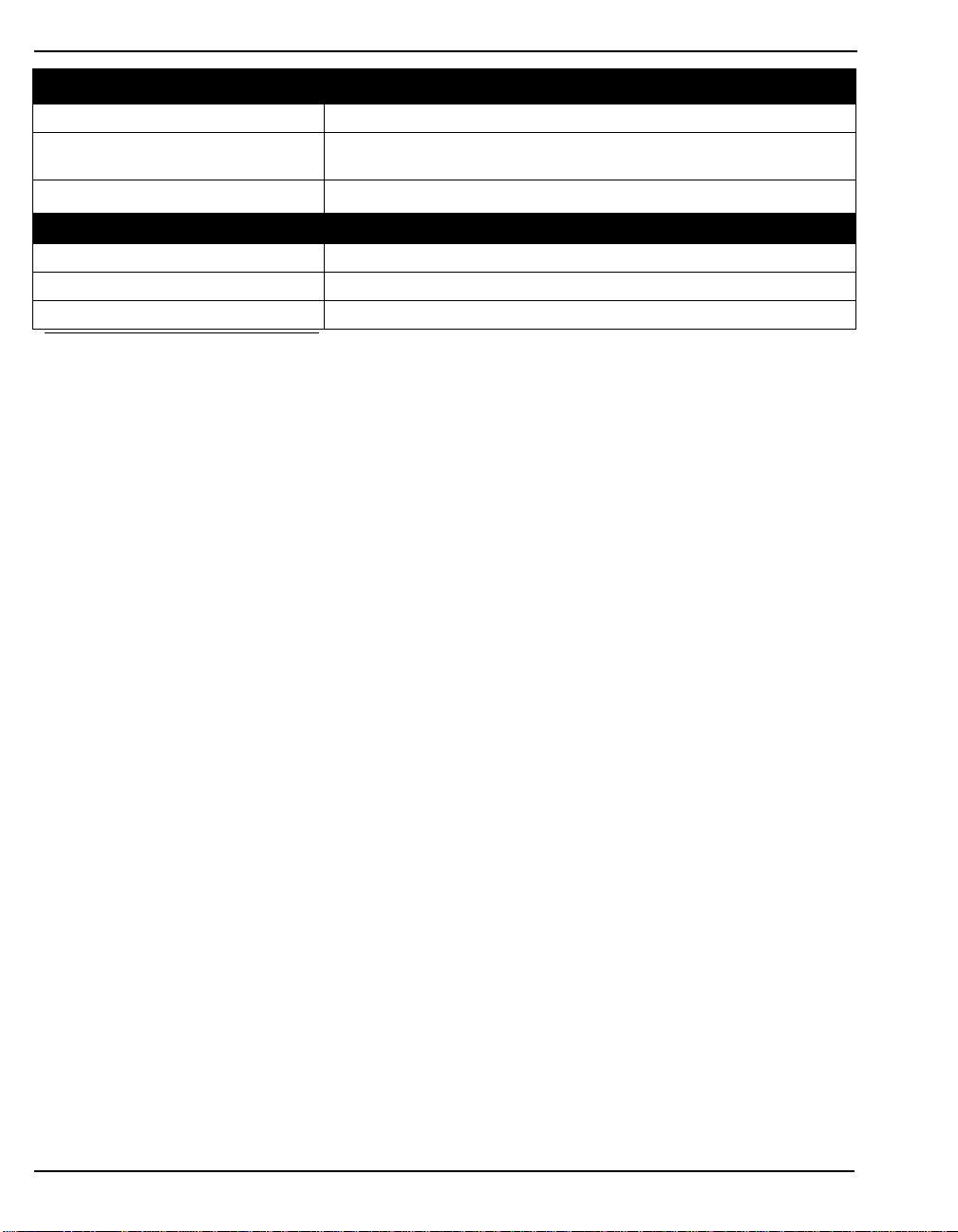
T roubleshooting Chapter 8
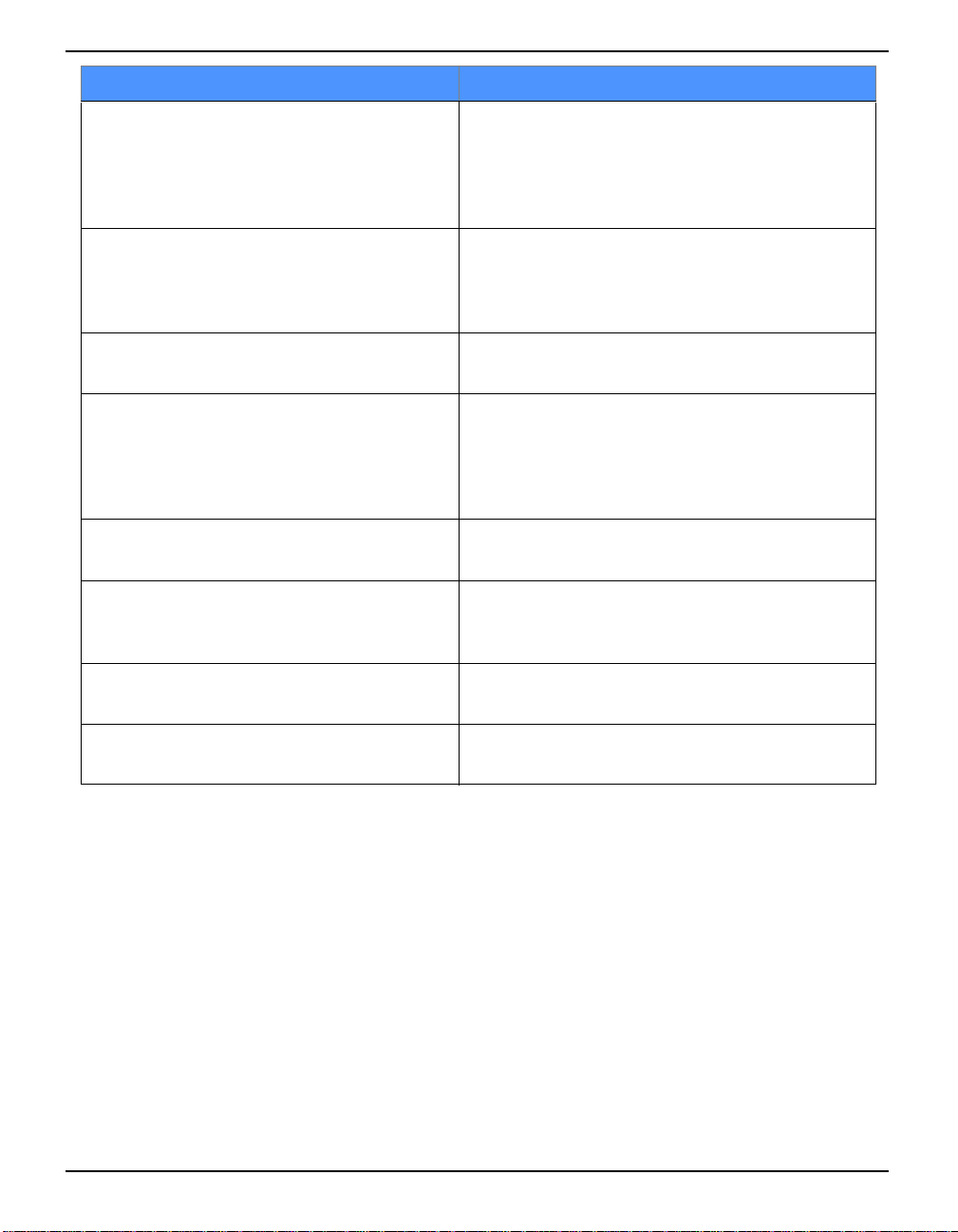
Symptom Related Section
A command is not accepted by the receiver Check for correct spelling and command syntax.
See Section 4.1, Communications with the
Receiver, Page 57 and refer to the FRESET
command in the OEMV Firmware Reference
Manual.
Differential mode is not working properly See Section 4.3, Transmitting and Receiving
Corrections, Page 60 and refer to the
COMCONFIG log in the OEMV Firmware
Reference Manual.
There appears to be a problem with the
receiver’s memory
An environmental or memory failure. The
receiver temperature is out of acceptable
range or the internal thermometer is not
working
Overload and overrun problems. Either the
CPU or port buffers are overloaded
The receiver is indicating that an invalid
authorization code has been used
The receiver is being affected by jamming Move the receiver away from any possible
The receiver’s automatic gain control (AGC)
is not working properly
Refer to the NVMRESTORE command in the
OEMV Firmware Reference Manual.
See the ENVIRONMENTAL sections in the tables
of Appendix A, Technical Specifications starting on
Page 129.
Move the receiver to within an acceptable
temperature range or increase the baud rate.
Reduce the amount of logging. See also Section
4.1.1, Serial Port Default Settings, Page 57.
Refer to the Version log, VALIDMODELS log and
the MODEL command in the OEMV Firmware
Reference Manual.
jamming sources.
See Section 3.1.2, Choosing a Coaxial Cable,
Page 34 and the jamming symptom in this table.
OEMV Family Installation and Operation User Manual Rev 5B 125

Chapter 8 Troubleshooting
8.1 Examining the RXSTATUS Log
The RXSTATUS log provides detailed status information about your receiver and can be used to
diagnose problems. Please refer to the OEMV Firmware Reference Manual for details on this log and
on how to read the receiver error word and status word. Tables 23 and 24 on pages 126 to 12 8 gi ve
you actions to take when your receiver has an error flag in either of these words.
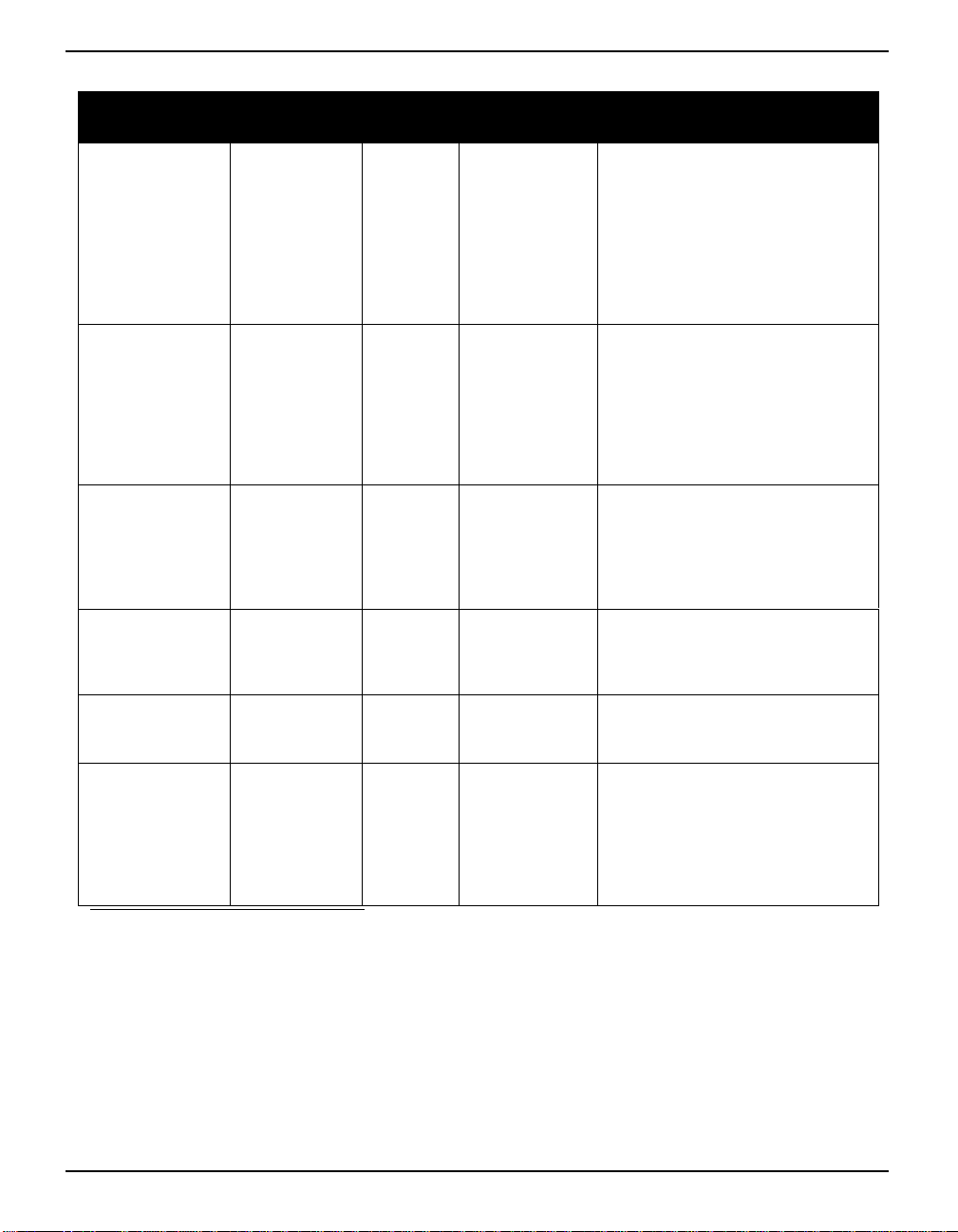
Table 23: Resolving a Receiver Error Word
Bit Set Action to Resolve
0 Issue a FRESET command
1 Issue a FRESET command
2 Issue a FRESET command
4 Contact Customer Service as described on Page 18
5 Check the VERSION log
6 Issue a FRESET command
7 See Section 3.1.3, Power Supply Requirements, Page 34
8 Issue a NVMRESTORE command
9 Check temperature ranges in the ENVIRONMENTAL table
sections of Appendix A, Technical Specifications starting on
Page 129
10 Contact Customer Service as described on Page 18
11
12
13
14
15 Move the receiver away from any possible jamming sources
126 OEMV Family Installation and Operation User Manual Rev 5B
T roubleshooting Chapter 8
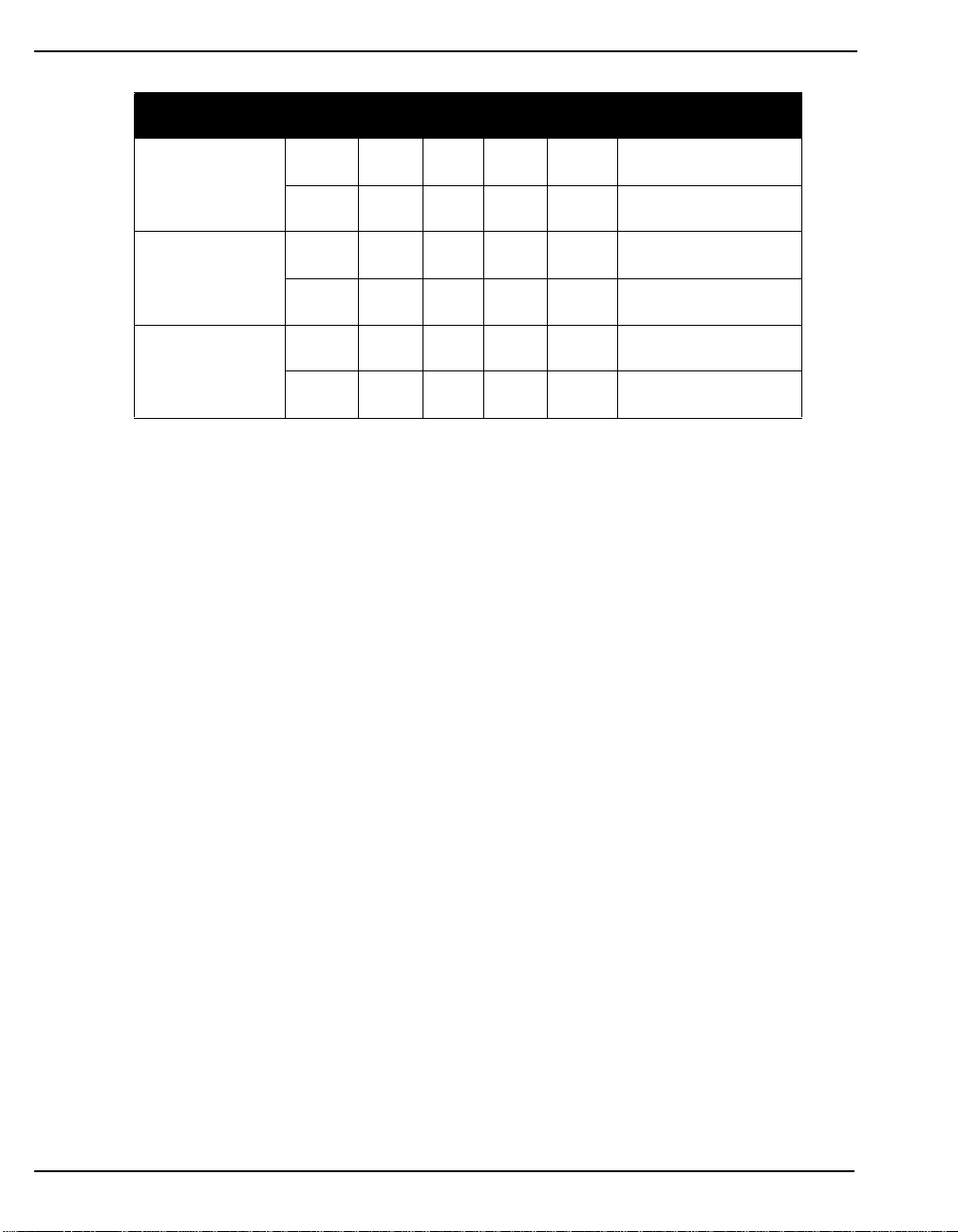
Table 24: Resolving an Error in the Receiver Status Word
Bit Set Action to Resolve
0 Check the Error Word in the RXSTATUS log. See also Table 23, Resolving a
Receiver Error Word on Page 126.
1 Check temperature ranges in the ENVIRONMENTAL table sections of
Appendix A, , Technical Specifications starting on Page 129.
2 See Section 3.1.3, Power Supply Requirements, Page 34.
3 See Section 3.1.1, Selecting a GNSS Antenna, Page 33, Section 3.1.2,
4
5
6
7 See Section 4.1.1, Serial Port Default Settings, Page 57.
8
9
Choosing a Coaxial Cable, Page 34, Section 3.2.4, Connecting the Antenna to
the Receiver, Page 40, Section 3.3.7, Antenna LNA Power, Page 51 and
refer
to the Time to First Fix and Satellite Acquisition section of the GPS+
Reference Manual
.
10
11
14 Move the receiver away from any possible jamming sources.
15 See Section 3.1.2, Choosing a Coaxial Cable, Page 34 and move the receiver
away from any possible jamming sources.
16 Move the receiver away from any possible jamming sources.
17 See Section 3.1.2, Choosing a Coaxial Cable, Page 34 and move the receiver
away from any possible jamming sources.
18 None. Once enough time has passed for a valid almanac to be received, this bit
will be set to 0. Also,
section of the GPS+ Reference Manual
19 None. This bit only indicates if the receiver has calculated a position yet.
refer to the Time to First Fix and Satellite Acquisition
.
Refer
to the Time to First Fix and Satellite Acquisition section of the GPS+
Reference Manual
20 None. This bit is simply a status bit indicating if the receiver’s position has been
manually fixed and does not represent a problem. Refer also to the FIX
command in the OEMV Firmware Reference Manual.
Continued on Page 128
OEMV Family Installation and Operation User Manual Rev 5B 127
Chapter 8 Troubleshooting
Bit Set Action to Resolve
21 None. This bit simply indicates if clock steering has been manually disabled.
Refer also to the FRESET command in the OEMV Firmware Reference Manual.
22 None. This bit only indicates if the clock model is valid. Refer also to the
FRESET command in the OEMV Firmware Reference Manual.
23 None. This bit indicates whether or not the phase-lock-loop is locked when using
an external oscillator. Refer also to the FRESET command in the OEMV
Firmware Reference Manual.
30 None. This bit indicates if any bits in the auxiliary 2 status word are set. The
auxiliary 2 word simply provides status information and does not provide any
new information on problems. Refer also to the FRESET command in the OEMV
Firmware Reference Manual.
31 None. This bit indicates if any bits in the auxiliary 1 status word are set. The
auxiliary 1 word simply provides status information and does not provide any
new information on problems.Refer also to the FRESET command in the OEMV
Firmware Reference Manual.
128 OEMV Family Installation and Operation User Manual Rev 5B
Appendix A Technical Specifications
p
A.1 OEMV Family Receiver Performance
PERFORMANCE (Subject To GPS System Characteristics)
Position Accuracy
Time To First Fix
a
Standalone:
L1 only 1.8 m RMS
L1/L2 1.5 m RMS
WAAS:
L1 only 1.2 m RMS
L1/L2 0.9 m RMS
DGPS 0.45 m RMS
RT-20 0.20 m RMS
RT-2 0.01 m + 1 ppm RMS
CDGPS: 1.0 m RMS (OEMV-1 and OEMV-3 only)
OmniSTAR:
VBS 0.7 m RMS (OEMV-1 and OEMV-3 only)
XP 0.15 m RMS (OEMV-3 only)
HP 0.10 m RMS (OEMV-3 only)
Post Processed 5 mm + 1 ppm RMS
Hot: 30 s
Warm: 40 s (Almanac, approximate position and time, no recent ephemeris)
Cold: 50 s
(Almanac and recent ephemeris saved and approximate position)
(No almanac or ephemeris and no approximate position or time)
Reacquisition
Data Rates
0.5 s L1 (typical)
1.0 s L2 (typical) (OEMV-2 and OEMV-3 only)
Raw
Measurements: 20 Hz
Computed
Position: 20 Hz
OmniSTAR HP
Position: 20 Hz (OEMV-3 only)
Time Accuracy
Velocity Accuracy
Measurement Precision
Dynamics
a. Typical values. Performance specifications are subject to GPS system characteristics, U.S. DOD operational degradation,
ionospheric and tropospheric conditions, satellite geometry, baseline lengt h and multipath effects.
b. Tim e accuracy does not include biases due to RF or anten na delay.
c. In accordance with ex
a b
ort licensing.
20 ns RMS
0.03 m/s RMS
C/A code phase 6 cm RMS
L1 carrier phase:
Differential 0.75 mm RMS
L2 P code 25 cm RMS (OEMV-2 and OEMV-3 only)
L2 carrier phase:
Differential 2 mm RMS (OEMV-2 and OEMV-3 only)
Velocity 515 m/s
Height 18,288 m
c
c
OEMV Family Installation and Operation User Manual Rev 5B 129
Appendix A Technical Specifications
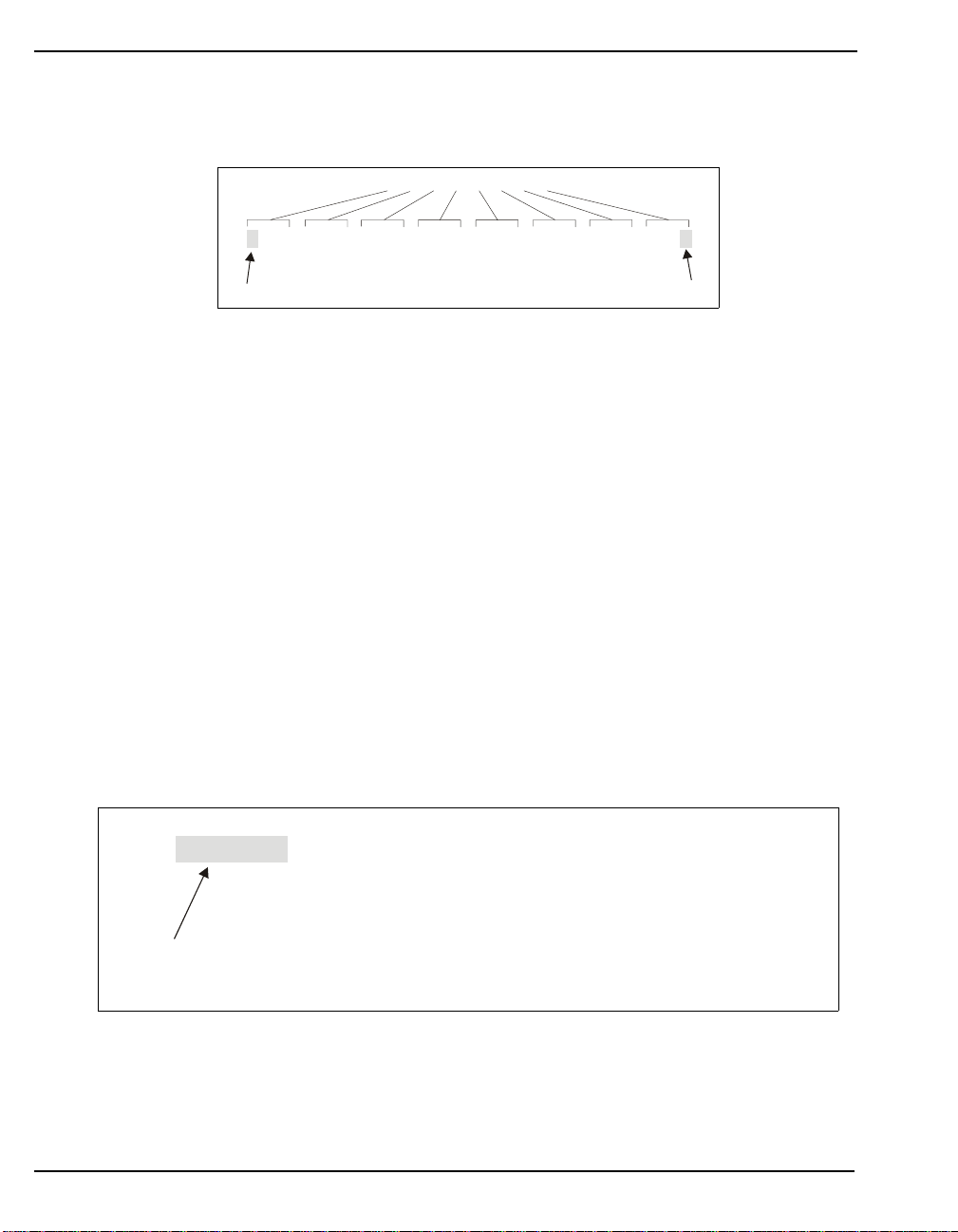
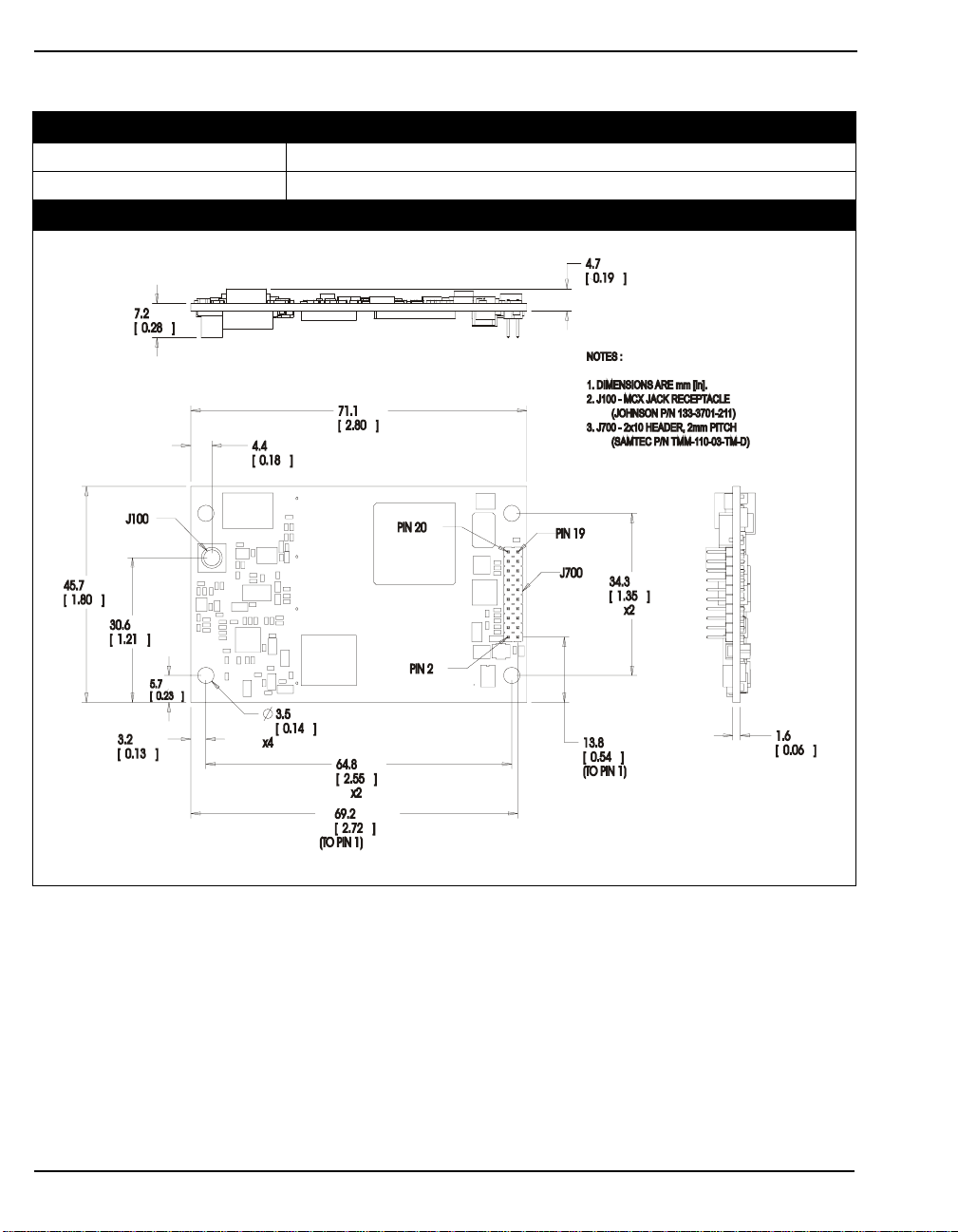
A.2 OEMV-1 Card
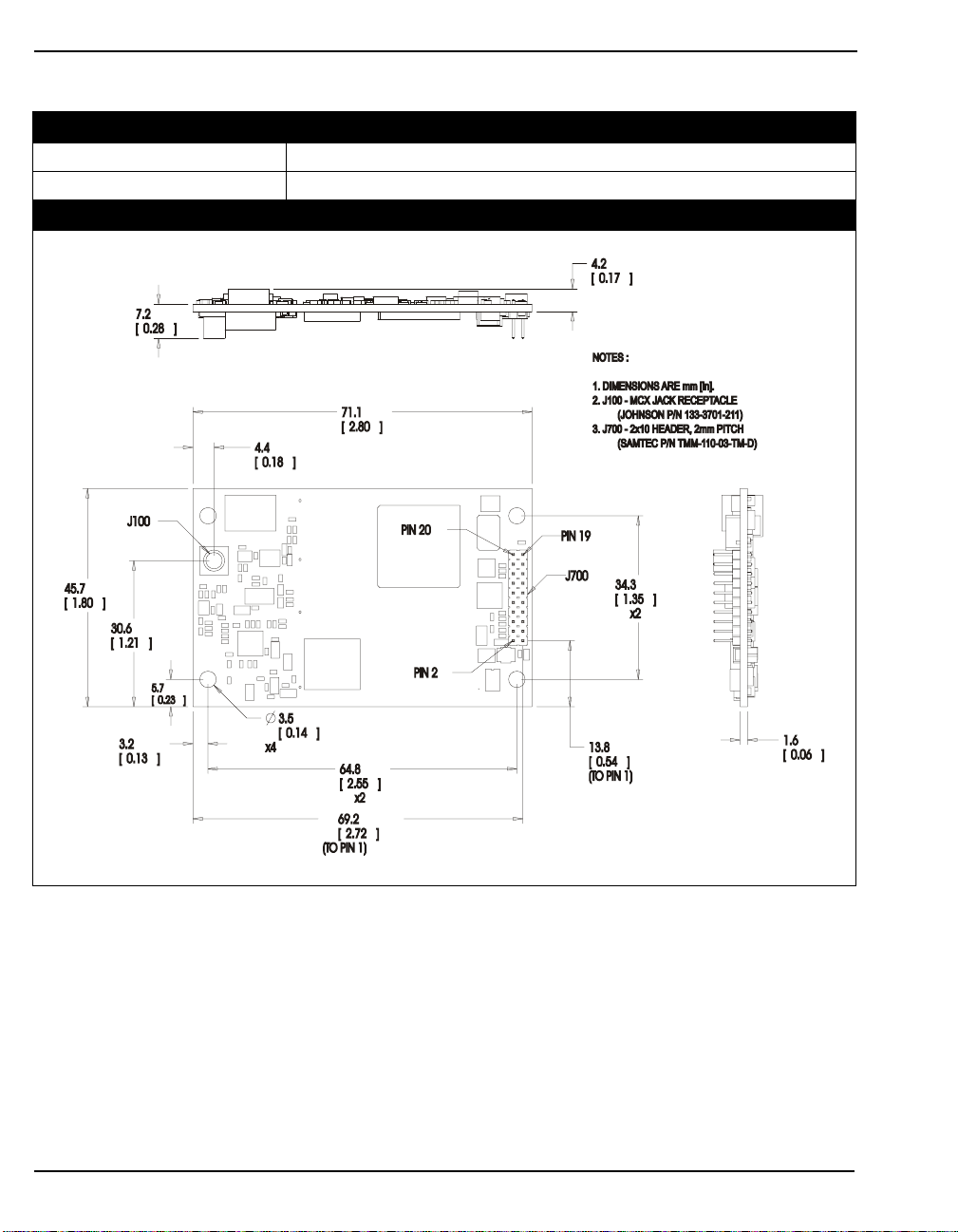
PHYSICAL
Size 46 mm x 71 mm x 10.3 mm with connectors
Weight 21.5 grams
MECHANICAL DRAWINGS
Figure 47: OEMV-1 Board Dimensions
130 OEMV Family Installation and Operation User Manual Rev 5B
Technical Specific ations Appendix A
ENVIRONMENTAL
Operating Temperature -40°C to +85°C
Storage Temperature -45°C to +95°C
Humidity Not to exceed 95% non-condensing
Random Vibe RTCA D0-160D (4g)
Bump/Shock MIL-STD 810F (40g)
POWER REQUIREMENTS
Voltage +3.3 V DC +5%/-3%
Allowable Input Voltage Ripple 100 mV p-p (max.)
Power consumption
1.1 W (typical, GPS only)
1.6 W (typical, GPS and L-Band)
RF INPUT / LNA POWER OUTPUT
Antenna Connector MCX female, 50 Ω nominal impedance (See Figure 47 on Page 130)
Acceptable RF Input Level -80 to -105 dBm
RF Input Frequencies GPS L1: 1575.42 MHz
OmniSTAR
or CDGPS: 1525 to 1560 MHz
LNA Power
External (Optional Input)
Output to antenna
(See also Section 2.3.1 on Page 32)
+5.5 to +16 V DC, 100 mA max. (user-supplied)
+4.75 to +5.10 V DC @ 0 - 100 mA
INPUT/OUTPUT DATA INTERFACE
COM1
Electrical format LVTTL
Bit rates
a
Signals supported COM1_Tx and COM1_Rx
Electrical format
Bit rates
a
Signals supported COM2_Tx and COM2_Rx
Electrical format
Bit rates
a
Signals supported COM3_Tx and COM3_Rx
Continued on Page 132
300, 1200, 4800, 9600 (default), 19200, 38400, 57600, 115200,
230400, 460800, 921600 bps
COM2
LVTTL
300, 1200, 4800, 9600 (default), 19200, 38400, 57600, 115200,
230400, 921600 bps
COM3
b c d
LVTTL
300, 1200, 4800, 9600 (default), 19200, 38400, 57600, 115200,
230400 bps
OEMV Family Installation and Operation User Manual Rev 5B 131
Appendix A Technical Specifications
E F
CAN BUS
Electrical format LVTTL (requires external CAN transceiver)
Bit rates 500 kb/s maximum. CAN Bus throughput is determined by slowest
Signals supported
device on the bus.
CAN1 is on Pins 6 and 7. CAN2 is on Pins 8 and 20. g
ef g
USB
Electrical format Conforms to USB 1.1
Bit rates 5 Mb/s maximum
Signals supported USB D (+) and USB D (-)
a. Baud rates higher than 115,200 bps are not supported by standard PC hardware. Special PC
hardware may be required for higher rates, including 230400 bps, 460800 bps, and 921600 bps.
b. Upon power-up, USB is enabled and COM3 is disabled by default. COM3_Tx and COM3_Rx
are multiplexed with USB D (+) and EVENT1, respectively.
c. The receiver cannot prevent the host system from enumerating USB while using COM3 on the
OEMV-1. This is due to the plug-and-play nature of USB. Do not connect a USB cable while
using COM3.
d. Enable COM3 using the INTERFACEMODE command.
e. CAN1_RX and CAN1_TX are multiplexed with VARF and EVENT2, respectively. The default
behavior is that EVENT2 is active. For VARF, refer to the FREQUENCYOUT command.
f. CAN Bus behavior must be asserted through the NovAtel API software. See Section 3.3.3, CAN
Bus on Page 46 for further details.
g. See also Figure 48 on Page 135 and its table.
132 OEMV Family Installation and Operation User Manual Rev 5B
Technical Specific ations Appendix A
Table 25: OEMV-1 Strobes
Strobes
Event1 (Mark 1) Multiplexed pin
Event2 (Mark 2) Multiplexed pin Input
PV (Position
Valid)
VARF (Variable
Frequency)
RESETIN Dedicated pin Input Active low Reset LVTTL signal input from
TIMEMARK Dedicated pin Output Active low A time synchronization output. This
Default
Behavior
with COM3
Dedicated pin Output Active high Indicates a valid GPS position
Multiplexed pin Output Active low A programmable variable
Input/
Output
Input
Leading
edge
triggered
Leading
edge
triggered
Factory Default
Active low An input mark for which a pulse
greater than 150 ns triggers certain
logs to be generated. (Refer to the
MARKPOS and MARKTIME logs
and ONMARK trigger.) Polarity is
configurable using the
MARKCONTROL command. The
mark inputs have 10K pull-up
resistors to 3.3 V
Active low An input mark for which a pulse
greater than 150 ns triggers certain
logs to be generated. (Refer to the
MARK2POS and MARK2TIME
logs.) Polarity is configurable using
the MARKCONTROL command.
The mark inputs have 10K pull-up
resistors to 3.3 V.
solution is available. A high level
indicates a valid solution or that the
FIX POSITION command has been
set (refer to the FIX POSITION
command). VDD is 3.3V.
frequency output ranging from 0 20 MHz (refer to the
FREQUENCYOUT command).
external system; active low, >
duration
is a pulse where the leading edge is
synchronized to receivercalculated GPS Time. The polarity,
period and pulsewidth can be
configured using PPSCONTROL
command.
Comment
a
20 µs
a. The commands and logs shown in capital letters (for example, MARKCONTROL) are
discussed in further detail in the OEMV Family Firmware Reference Manual.
OEMV Family Installation and Operation User Manual Rev 5B 133
Appendix A Technical Specifications
Table 26: OEMV-1 Strobe Electrical Specifications
Strobe Sym Min Typ Max Units Conditions
Event1 (Mark 1)
Event2 (Mark2)
TIMEMARK
PV
VARF
RESETIN
V
IL
V
IH
V
OL
V
OH
V
IL
V
IH
2.0 V VDD = 3.3 V; 85°C
3.0 V VDD = 3.3 V; 85°C
2.3 V VDD = 3.3 V; 85°C
0.8 V VDD = 3.3 V; 85°C
0.4 V VDD = 3.3 V; 85°C
0.8 V VDD = 3.3 V; 85°C
134 OEMV Family Installation and Operation User Manual Rev 5B
Technical Specific ations Appendix A
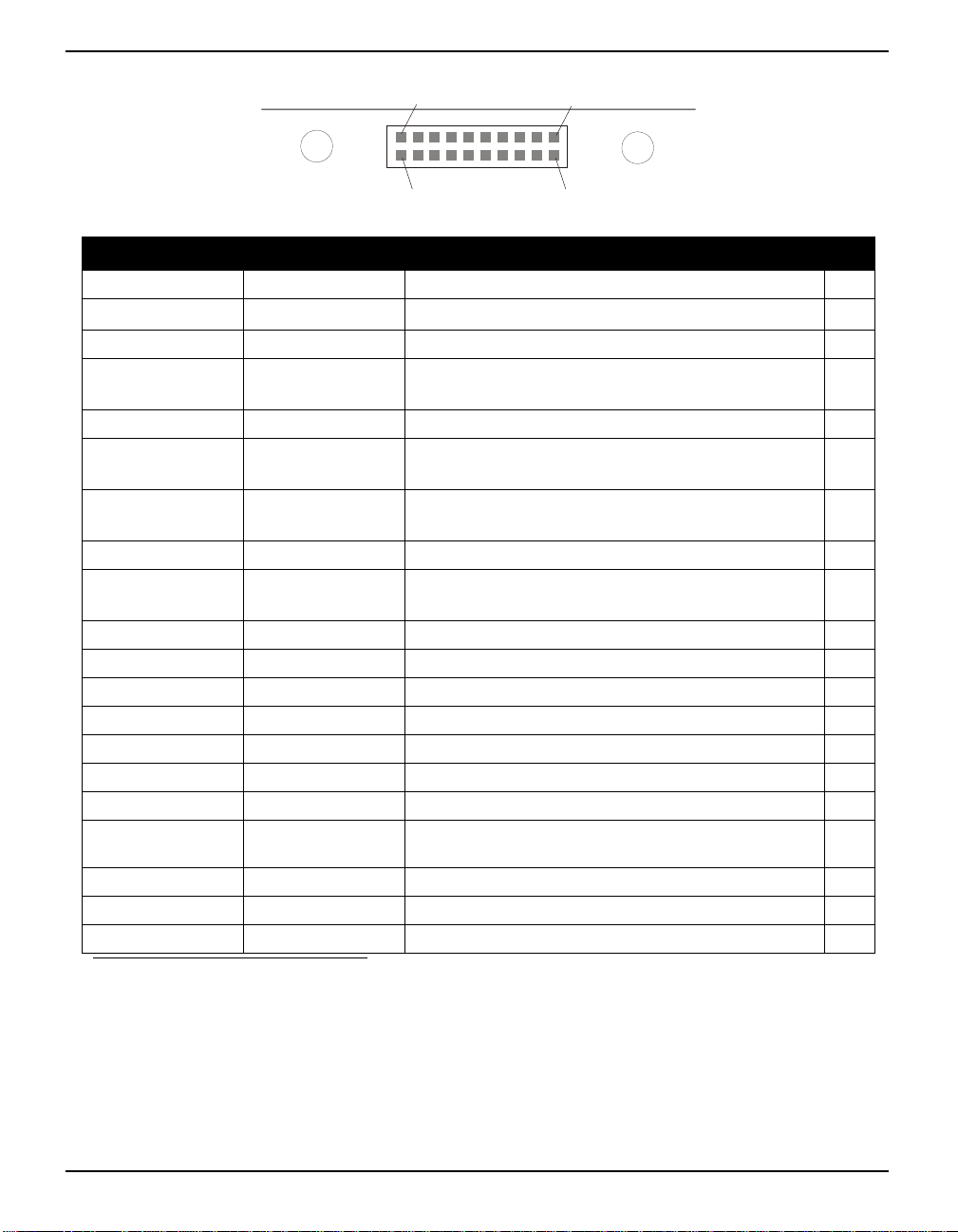
0
Pin 19
Pin 2
Pin 1
Pin 2
Figure 48: Top-view of 20-Pin Connector on the OEMV-1
Signal
Behavior
LNA_PWR Input DC Power supply for external antenna LNA 1
V
IN
Input DC DC power supply for card 2
USB D (-) Bi-directional USB interface data (-) 3
USB D (+) /
Multiplexed Multiple xed pin behavior
COM3_Rx
RESETIN See strobes Card reset 5
VARF / CAN1_Rx Multiplexed Multiplexed pin behavior, see strobes
Event2 / CAN1_Tx Multiplexed Multiplexed pin behavior, see strobes
CAN2_RX Bi-directional CAN Bus dedicated port 8
Event1 / COM3_Tx Multiplexed Multiplexed pin behavior, see strobes
GND Ground Digital Ground 10
COM1_Tx Output Transmitted Data for COM 1 output 11
COM1_Rx Input Received Data for COM 1 input 12
GND Ground Digital Ground 13
COM2_Tx Output Transmitted Data for COM 2 output 14
COM2_Rx Input Received Data for COM 2 input 15
GND Ground Digital Ground 16
PV See strobes Output indicates 'good solution' or valid GPS position
GND Ground Digital Ground 18
TIMEMARK See strobes Pulse output synchronized to GPS Time 19
CAN2_TX Bi-directional CAN Bus dedicated port 20
a
Descriptions Pin
4
default: USB D (+)
6
default: VARF
7
default: Event2
9
default: Event1
17
when high
a. A bi-directional Transient Voltage Suppressor (TVS) device is included between 3.3V and
ground. Input/Output (I/O) lines are protected by TVS devices. Series resistance is included
for the following I/O lines: COM1/COM2/COM3 Tx and Rx, RESETIN, Event1 and
Event2. Lines that do not have series resistance include: CAN1_Tx, CAN1_Rx, CAN2_Tx,
CAN2_Rx, USB D (+) and USB D (-).
OEMV Family Installation and Operation User Manual Rev 5B 135
Appendix A Technical Specifications
A.3 OEMV-1G Card
PHYSICAL
Size 46 mm x 71 mm x 9.8 mm with connectors
Weight 21.5 grams
MECHANICAL DRAWINGS
Figure 49: OEMV-1G Board Dimensions
136 OEMV Family Installation and Operation User Manual Rev 5B
Technical Specific ations Appendix A
ENVIRONMENTAL
Operating Temperature -40°C to +85°C
Storage Temperature -45°C to +95°C
Humidity Not to exceed 95% non-condensing
Random Vibe RTCA D0-160D (4g)
Bump/Shock MIL-STD 810F (40g)
POWER REQUIREMENTS
Voltage +3.3 V DC +5%/-3%
Allowable Input Voltage Ripple 100 mV p-p (max.)
Power consumption 1.1 W (typical, GPS and GLONASS)
RF INPUT / LNA POWER OUTPUT
Antenna Connector MCX female, 50 Ω nominal impedance (See Figure 49 on Page 136)
Acceptable RF Input Level -80 to -105 dBm
RF Input Frequencies GPS L1: 1575.42 MHz
GLONASS L1: 1602.0 MHz for Fk=0 where k = (-7 to +13)
Channel spacing 562.5 kHz
LNA Power
External (Optional Input)
Output to antenna
(See also Section 2.3.1 on Page 32)
+5.5 to +16 V DC, 100 mA max. (user-supplied)
+4.75 to +5.10 V DC @ 0 - 100 mA
INPUT/OUTPUT DATA INTERFACE
COM1
Electrical format LVTTL
Bit rates
a
Signals supported COM1_Tx and COM1_Rx
Electrical format
Bit rates
a
Signals supported COM2_Tx and COM2_Rx
Electrical format
Bit rates
a
Signals supported COM3_Tx and COM3_Rx
Continued on Page 132
300, 1200, 4800, 9600 (default), 19200, 38400, 57600, 115200,
230400, 460800, 921600 bps
COM2
LVTTL
300, 1200, 4800, 9600 (default), 19200, 38400, 57600, 115200,
230400, 921600 bps
COM3
b c d
LVTTL
300, 1200, 4800, 9600 (default), 19200, 38400, 57600, 115200,
230400 bps
E F
CAN BUS
ef g
OEMV Family Installation and Operation User Manual Rev 5B 137
Appendix A Technical Specifications
Electrical format LVTTL (requires external CAN transceiver)
Bit rates 500 kb/s maximum. CAN Bus throughput is determined by slowest
device on the bus.
Signals supported
CAN1 is on Pins 6 and 7. CAN2 is on Pins 8 and 20. g
USB
Electrical format Conforms to USB 1.1
Bit rates 5 Mb/s maximum
Signals supported USB D (+) and USB D (-)
a. Baud rates higher than 115,200 bps are not supported by standard PC hardware. Special PC
hardware may be required for higher rates, including 230400 bps, 460800 bps, and 921600 bps.
b. Upon power-up, USB is enabled and COM3 is disabled by default. COM3_Tx and COM3_Rx
are multiplexed with USB D (+) and EVENT1, respectively.
c. The receiver cannot prevent the host system from enumerating USB while using COM3 on the
OEMV-1G. This is due to the plug-and-play nature of USB. Do not connect a USB cable while
using COM3.
d. Enable COM3 using the INTERFACEMODE command.
e. CAN1_RX and CAN1_TX are multiplexed with VARF and EVENT2, respectively. The default
behavior is that EVENT2 is active. For VARF, refer to the FREQUENCYOUT command.
f. CAN Bus behavior must be asserted through the NovAtel API software. See Section 3.3.3, CAN
Bus on Page 46 for further details.
g. See also Figure 50 on Page 141 and its table.
138 OEMV Family Installation and Operation User Manual Rev 5B
 Loading...
Loading...