

Novalab NL7352 User Manual
Rev 1.2
Novalab MAD Sensor Manual
The Novalab Magnetic Anomaly Detector (MAD) consists of a three axis magnetic
sensor, processor, and an FCC approved radio with antenna. Its magnetometer function
is intended to detect changes in the local magnetic field which could be caused by a
nearby ferrous object moving w.r.t. the sensor.
While the device could be used to detect a variety of objects, we will use the detection of
a parked automobile as an example of its operation.
Installation
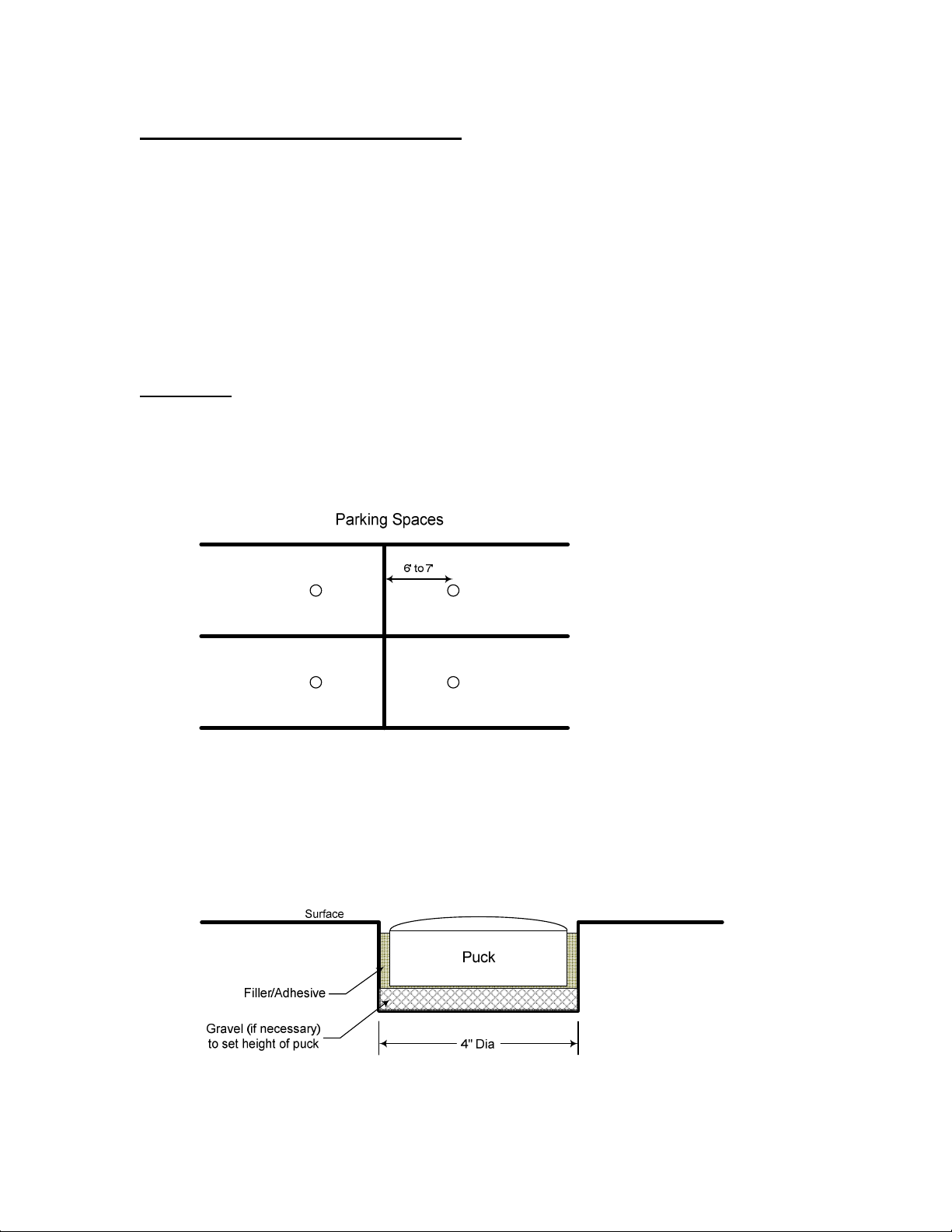
The sensor should be positioned in a parking space such that it has minimal interference
from neighboring spaces. This necessitates placing in on the parking centerline and about
6’ to 7’ from the front of the parking – see figure:
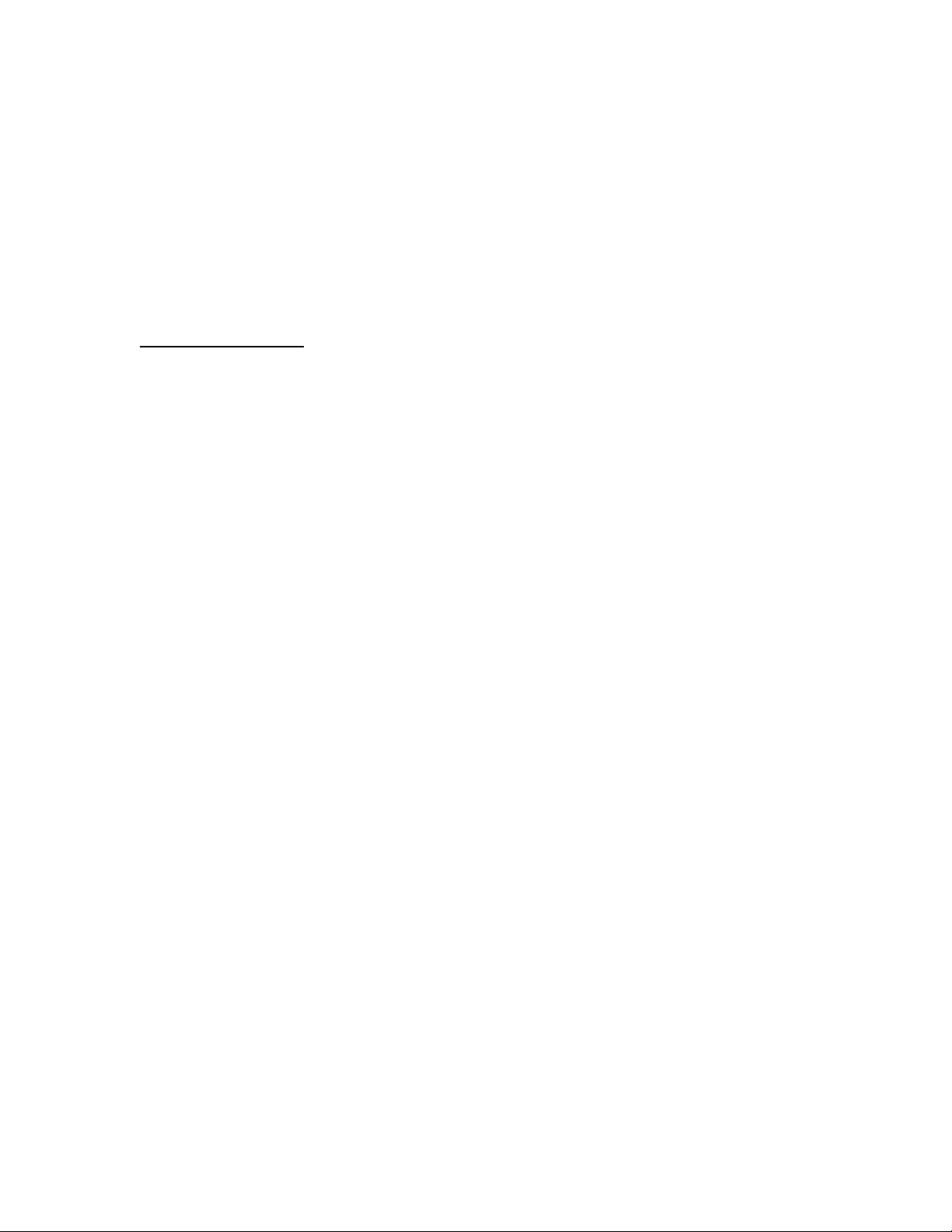
It is important to totally immobilize devices, as any rotation will cause magnetic offsets
from the provisioned state. This could happen, for example, if a vehicle’s wheel is
turning while on the Puck. To that end, whatever filler is used (silicone, etc.) should be
applied at the bottom of the Puck well, as well as along its sides, to provide maximum
adhesion area. This is shown in the following figure:
Confidential Document 2/12/2010
Rev 1.2
It is theoretically possible to totally burry, and thus cover the Pucks. This has not been
tested as yet, and should be attempted in order to ascertain its performance in this
configuration. It is also possible to mount the devices above grade. This configuration
would provide greatest ease of deployment, and best sensitivity and range. However, the
preliminary resting done at NovaLab indicates that it may be difficult to achieve the
adequate adhesion to the surface that would guarantee long installation life. NovaLab
plans to produce different housing dome that would be more suitable for this application.
Gateway Positioning
The testing has showed that whenever possible, the gateway(s) should be positioned in
such a way so that the direct line is as much as possible looking along the length of the
vehicles, and not widthwise. The reason for this is the range in presence of interference.
Wider the spacing between the vehicles will allow more of the signal will get thru to the
gateway, so looking at the pucks “lengthwise” will include the parking lanes. In our
testing the difference between the lengthwise and widthwise oriented range is as much as
4 – 6 times.
It will rarely be possible to totally achieve this in every installation. It should be
remembered however, that a 45 degree path is far better than a widthwise (90 degree)
path. In any case, a combination of two gateways per a parking lot, positioned for
optimum path as well as distance will guarantee adequate coverage. One should
remember that the key to distance is the gap between the cars in the direction of the
gateway.
Clearly, every installation is different, and common sense will have to be used during the
planning stages. If so required, NovaLab will be happy to provide any assistance needed.
Confidential Document 2/12/2010
 Loading...
Loading...