

Page 1
Bridge Circuits
Marrying Gain and Balance
Jim Williams
Application Note 43
June 1990
Bridge circuits are among the most elemental and powerful
electrical tools. They are found in measurement, switching, oscillator and transducer circuits. Additionally, bridge
techniques are broadband, serving from DC to bandwidths
well into the GHz range. The electrical analog of the mechanical beam balance, they are also the progenitor of all
electrical differential techniques.
Resistance Bridges
Figure 1 shows a basic resistor bridge. The circuit is
usually credited to Charles Wheatstone, although S. H.
Christie, who demonstrated it in 1833, almost certainly
1
preceded him.
If all resistor values are equal (or the two
sides ratios are equal) the differential voltage is zero. The
excitation voltage does not alter this, as it affects both
sides equally. When the bridge is operating off null, the
excitation’s magnitude sets output sensitivity. The bridge
output is nonlinear for a single variable resistor. Similarly,
two variable arms (e.g., R
and RB both variable) produce
C
nonlinear output, although sensitivity doubles. Linear
outputs are possible by complementary resistance swings
in one or both sides of the bridge.
A great deal of attention has been directed towards this
circuit. An almost uncountable number of tricks and techniques have been applied to enhance linearity, sensitivity
R
EXCITATION
VOLTAGE
A
DIFFERENTIAL
OUTPUT
+
VOLTAGE
R
B
R
C
R
D
and stability of the basic configuration. In particular, transducer manufacturers are quite adept at adapting the bridge
to their needs (see Appendix A, “Strain Gauge Bridges”).
Careful matching of the transducer’s mechanical characteristics to the bridge’s electrical response can provide a
trimmed, calibrated output. Similarly, circuit designers
have altered performance by adding active elements (e.g.,
amplifiers) to the bridge, excitation source or both.
Bridge Output Amplifiers
A primary concern is the accurate determination of the
differential output voltage. In bridges operating at null the
absolute scale factor of the readout device is normally
less important than its sensitivity and zero point stability.
An off-null bridge measurement usually requires a well
calibrated scale factor readout in addition to zero point
stability. Because of their importance, bridge readout
mechanisms have a long and glorious history (see Appendix B, “Bridge Readout—Then and Now”). Today’s
investigator has a variety of powerful electronic techniques
available to obtain highly accurate bridge readouts. Bridge
amplifiers are designed to accurately extract the bridges
differential output from its common mode level. The
ability to reject common mode signal is quite critical. A
typical 10V powered strain gauge transducer produces
only 30mV of signal “riding” on 5V of common mode
level. 12-bit readout resolution calls for an LSB of only
7.3μV…..almost 120dB below the common mode signal!
Other significant error terms include offset voltage, and
its shift with temperature and time, bias current and gain
stability. Figure 2 shows an “Instrumentation Amplifier,”
which makes a very good bridge amplifier. These devices
are usually the first choice for bridge measurement,
and bring adequate performance to most applications.
AN43 F01
Figure 1. The Basic Wheatstone Bridge,
Invented by S. H. Christie
Note 1: Wheatstone had a better public relations agency, namely himself.
For fascinating details, see reference 19.
L, LT, LTC, LTM, Linear Technology and the Linear logo are registered trademarks of Linear
Technology Corporation. All other trademarks are the property of their respective owners.
an43f
AN43-1
Page 2
Application Note 43
In general, instrumentation amps feature fully differential
inputs and internally determined stable gain. The absence
of a feedback network means the inputs are essentially passive, and no significant bridge loading occurs. Instrumentation amplifiers meet most bridge requirements. Figure 3
lists performance data for some specific instrumentation
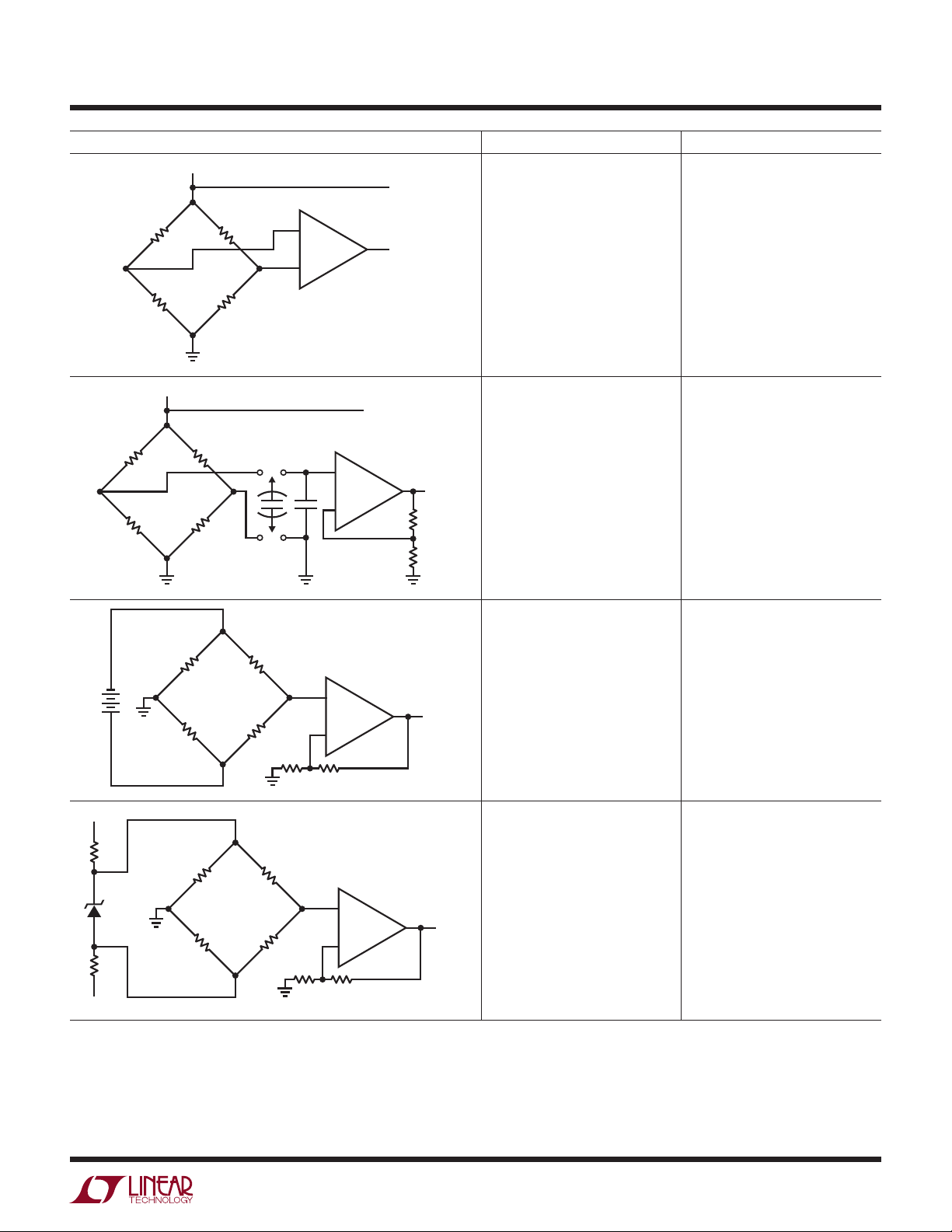
amplifiers. Figure 4’s table summarizes some options
for DC bridge signal conditioning. Various approaches
are presented, with pertinent characteristics noted. The
constraints, freedoms and performance requirements of
any particular application define the best approach.
+
–
mNO FEEDBACK RESISTORS USED
mGAIN FIXED INTERNALLY (TYP 10 OR 100)
OR SOMETIMES RESISTOR PROGRAMMABLE
mBALANCED, PASSIVE INPUTS
Figure 2. Conceptual Instrumentation Amplifier
AN43 F02
DC Bridge Circuit Applications
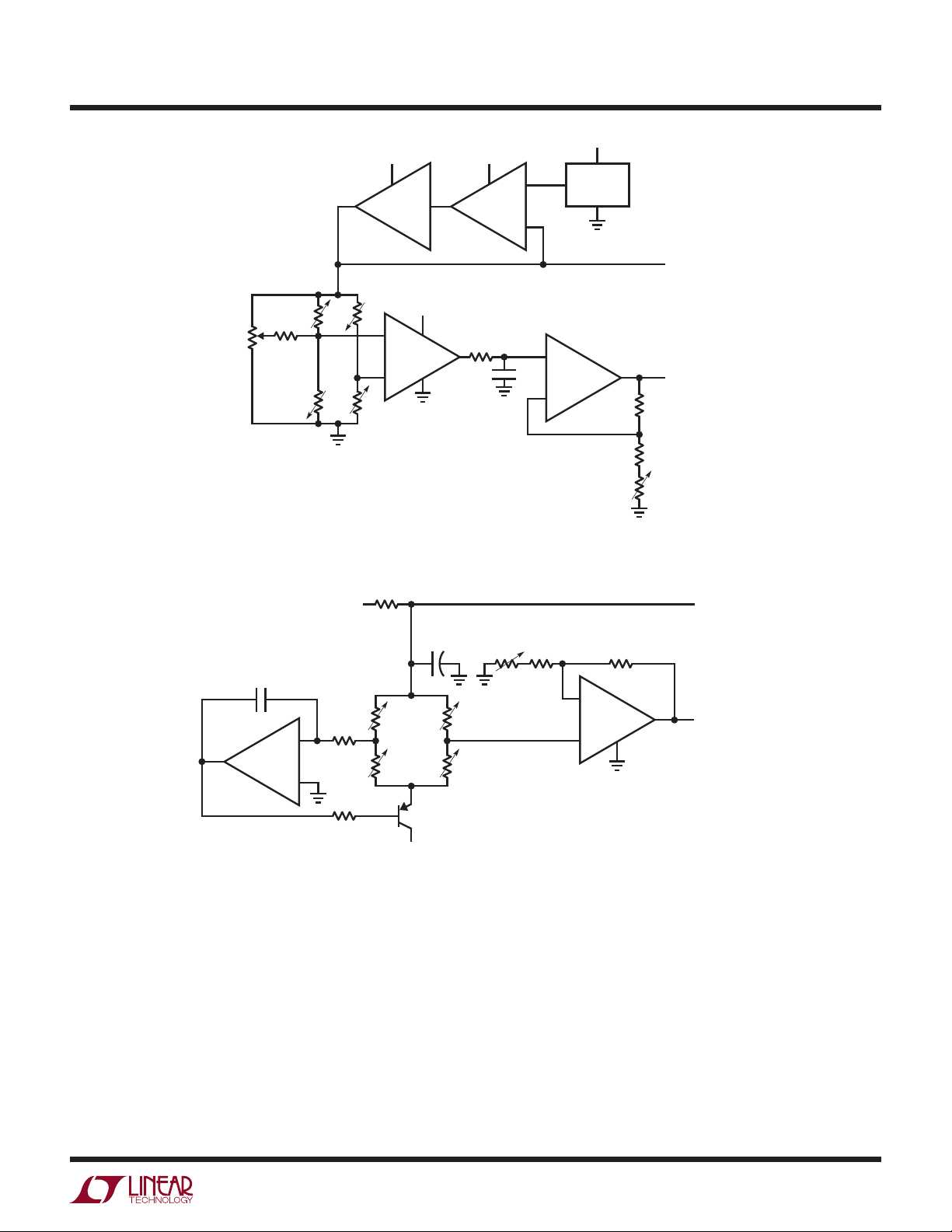
Figure 5, a typical bridge application, details signal conditioning for a 350Ω transducer bridge. The specified
strain gauge pressure transducer produces 3mV output
per volt of bridge excitation (various types of strain-based
transducers are reviewed in Appendix A, “Strain Gauge
®
Bridges”). The LT
1021 reference, buffered by A1A and
A2, drives the bridge. This potential also supplies the
circuits ratio output, permitting ratiometric operation of
a monitoring A/D converter. Instrumentation amplifier
A3 extracts the bridge’s differential output at a gain of
100, with additional trimmed gain supplied by A1B. The
configuration shown may be adjusted for a precise 10V
output at full-scale pressure. The trim at the bridge sets
the zero pressure scale point. The RC combination at A1B’s
input filters noise. The time constant should be selected
for the system’s desired lowpass cutoff. “Noise” may
originate as residual RF/line pick-up or true transducer
responses to pressure variations. In cases where noise
is relatively high it may be desirable to filter ahead of A3.
T h i s p r e v e n t s a n y p o s s i b l e s i g n a l i n f i d e l i t y d u e t o n o n l i n e a r
A3 operation. Such undesirable outputs can be produced
by saturation, slew rate components, or rectification
effects. When filtering ahead of the circuits gain blocks
remember to allow for the effects of bias current induced
errors caused by the filter’s series resistance. This can be
a significant consideration because large value capacitors,
particularly electrolytics, are not practical. If bias current
induced errors rise to appreciable levels FET or MOS input
amplifiers may be required (see Figure 3).
To trim this circuit apply zero pressure to the transducer
and adjust the 10k potentiometer until the output just
comes off 0V. Next, apply full-scale pressure and trim the
1k adjustment. Repeat this procedure until both points
are fixed.
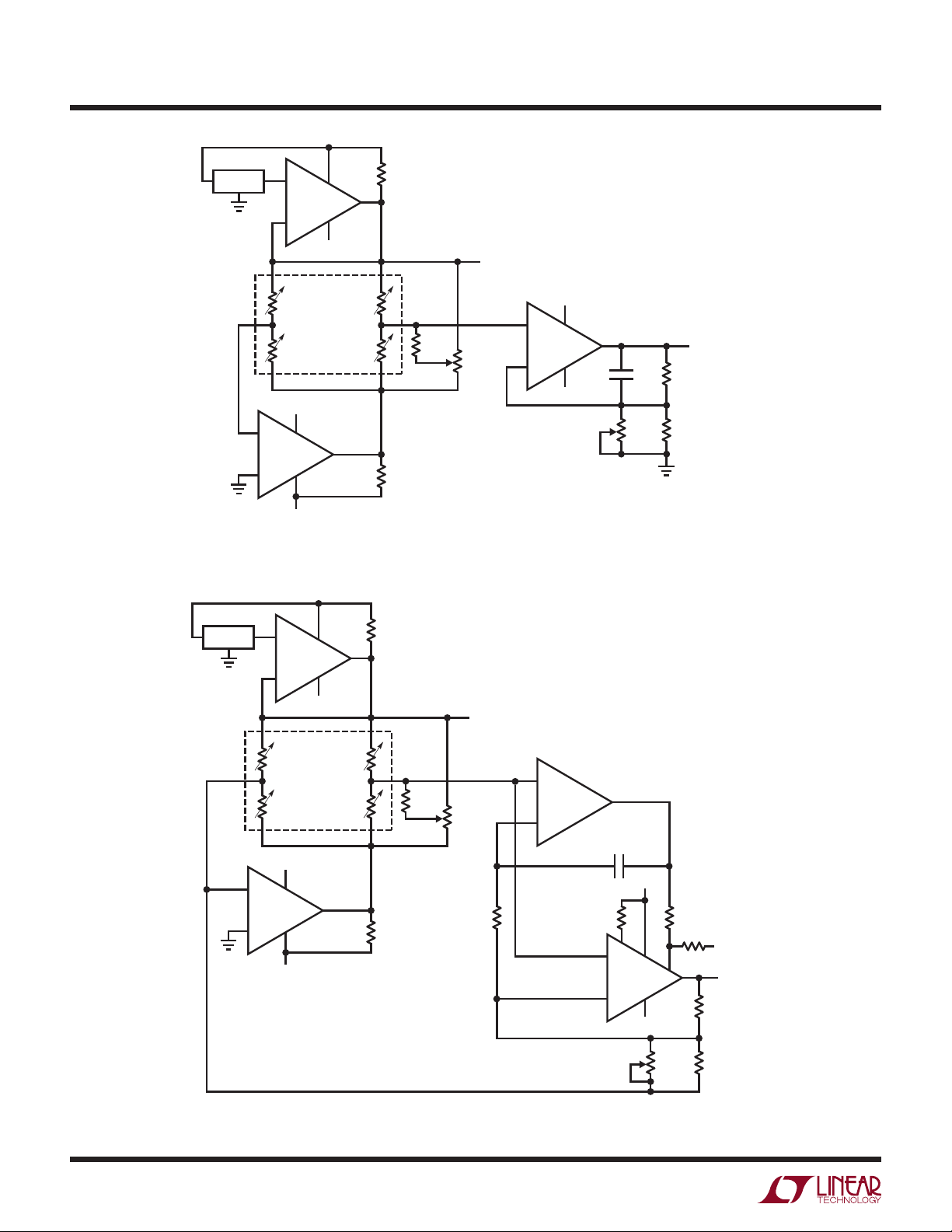
Common Mode Suppression Techniques
Figure 6 shows a way to reduce errors due to the bridges
common mode output voltage. A1 biases Q1 to servo the
bridges left mid-point to zero under all operating conditions. The 350Ω resistor ensures that A1 will find a stable
operating point with 10V of drive delivered to the bridge.
This allows A2 to take a single-ended measurement,
PARAMETER LTC1100 LT1101 LT1102
Offset
Offset Drift
Bias Current
Noise (0.1Hz to 10Hz)
Gain
Gain Error
Gain Drift
Gain Nonlinearity
CMRR
Power Supply
Supply Current
Slew Rate
Bandwidth
10μV
100nV/°C
50pA
2μV
P-P
100
0.03%
4ppm/°C
8ppm
104dB
Single or Dual, 16V Max
2.2mA
1.5V/μs
8kHz
Figure 3. Comparison of Some IC Instrumentation Amplifiers
160μV
2μV/°C
8nA
0.9μV
10,100
0.03%
4ppm/°C
8ppm
100dB
Single or Dual, 44V Max
105μA
0.07V/μs
33kHz
500μV
2.5μV/°C
50pA
2.8μV
10,100
0.05%
5ppm/°C
10ppm
100dB
Dual, 44V Max
5mA
25V/μs
220kHz
AN43-2
(USING LTC1050 AMPLIFIER)
LTC1043
0.5μV
50nV/°C
10pA
1.6μV
Resistor Programmable
Resistor Limited 0.001% Possible
Resistor Limited <1ppm/°C Possible
Resistor Limited 1ppm Possible
160dB
Single, Dual 18V Max
2mA
1mV/ms
10Hz
an43f
Page 3
Application Note 43
CONFIGURATION ADVANTAGES DISADVANTAGES
+V
RATIO
OUT
Best general choice. Simple,
straightforward. CMRR typically
>110dB, drift 0.05μV/°C to 2μV/°C,
gain accuracy 0.03%, gain drift
4ppm/°C, noise 10nV√Hz – 1.5μV
for chopper-stabilized types. Direct
ratiometric output.
AN43 F04a
+
–
INSTRUMENTATION
AMPLIFIER
OUT
CMRR, drift and gain stability
may not be adequate in highest
precision applications. May require
second stage to trim gain.
+V
RATIO
OUT
CMRR > 120dB, drift 0.05μV/°C.
Gain accuracy 0.001% possible.
Gain drift 1ppm with appropriate
resistors. Noise 10nV√Hz – 1.5μV
Multi-package—moderately
complex. Limited bandwidth.
Requires feedback resistors to set
gain.
for chopper-stabilized types. Direct
+
OUT
–
ratiometric output. Simple gain
trim. Flying capacitor commutation
provides lowpass filtering. Good
choice for very high performance—
monolithic versions (LTC1043)
available.
OP AMP
AN43 F04b
CMRR > 160dB, drift 0.05μV/°C to
0.25μV/°C, gain accuracy 0.001%
possible, gain drift 1ppm/°C with
appropriate resistors plus floating
Requires floating supply. No direct
ratiometric output. Floating supply
drift is a gain term. Requires
feedback resistors to set gain.
supply error, simple gain trim,
+
OUT
+
Noise 1nV√Hz possible.
–
OP AMP
+V
AN43 F04c
CMRR ≈ 140dB, drift 0.05μV/°C to
0.25μV/°C, gain accuracy 0.001%
possible, gain drift 1ppm/°C with
appropriate resistors plus floating
supply error, simple gain trim,
noise 1nV√Hz possible.
+
OUT
–
No direct ratiometric output.
Zener supply is a gain and offset
term error generator. Requires
feedback resistors to set gain.
Low impedance bridges require
substantial current from shunt
regulator or circuitry which
simulates it. Usually poor choice if
precision is required.
–V
OP AMP
AN43 F04d
Figure 4. Some Signal Conditioning Methods for Bridges
an43f
AN43-3
Page 4
Application Note 43
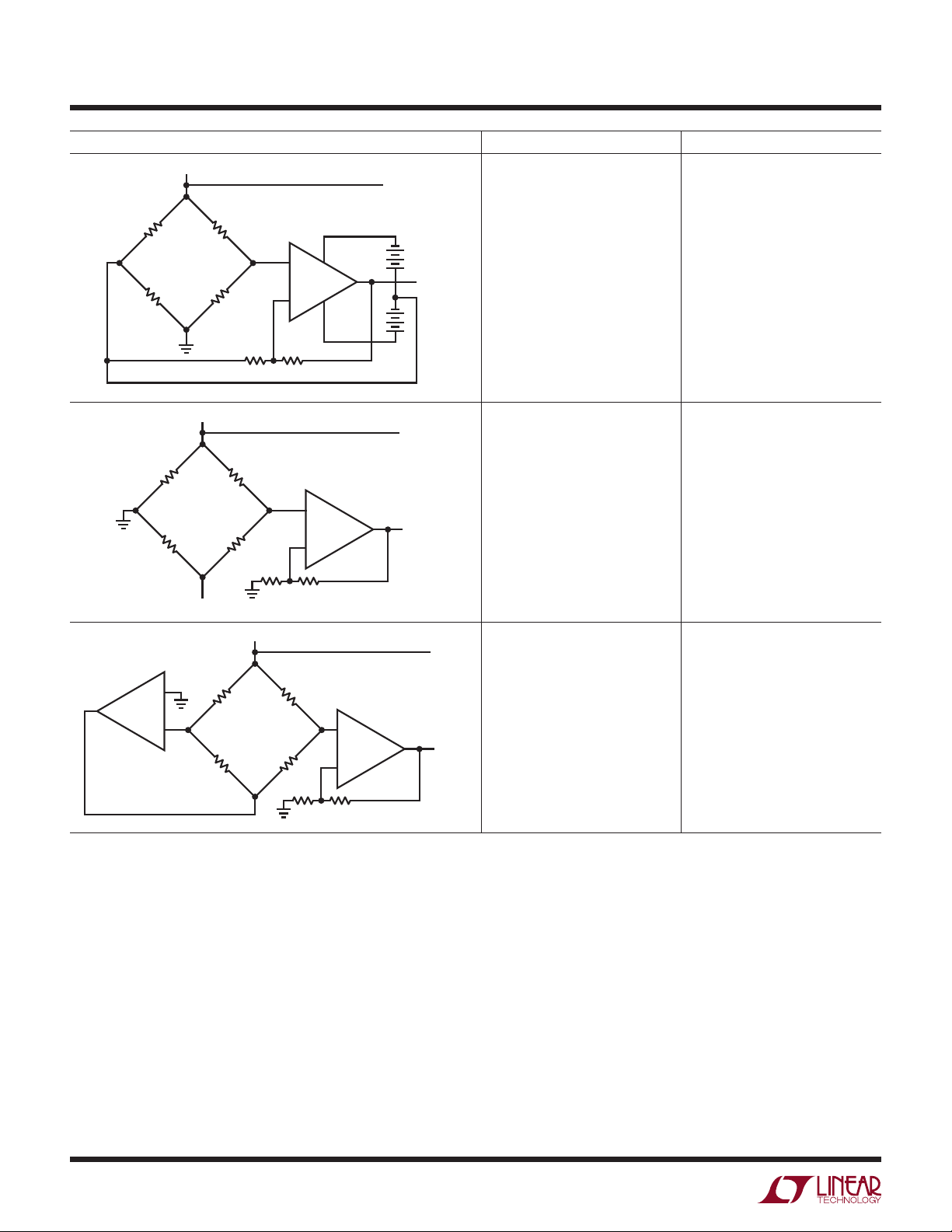
CONFIGURATION ADVANTAGES DISADVANTAGES
+V
+
–
OP AMP
RATIO
OUT
AN43 F04e
CMRR > 160dB, drift 0.05μV/°C to
0.25μV/°C, gain accuracy 0.001%
possible, gain drift 1ppm/°C with
appropriate resistors, simple gain
trim, ratiometric output, noise
1nV√Hz possible.
+
OUT
+
Requires precision analog level
shift, usually with isolation
amplifier. Requires feedback
resistors to set gain.
+V
+
–
–V
+
–
OP AMP
+V
+
–
OP AMP
AN43 F04f
RATIO
OUT
OUT
AN43 F04g
RATIO
OUT
OUT
CMRR ≈ 120dB to 140dB, drift
0.05μV/°C to 0.25μV/°C, gain
accuracy 0.001% possible, gain
drift 1ppm/°C with appropriate
resistors, simple gain trim, direct
ratiometric output, noise 1nV√Hz
possible.
CMRR = 160dB, drift 0.05μV/°C to
0.25μV/°C, gain accuracy 0.001%
possible, gain drift 1ppm/°C,
simple gain trim, direct ratiometric
output, noise 1nV√Hz possible.
Requires tracking supplies.
Assumes high degree of bridge
symmetry to achieve best CMRR.
Requires feedback resistors to set
gain.
Practical realization requires two
amplifiers plus various discrete
components. Negative supply
necessary.
Figure 4. Some Signal Conditioning Methods for Bridges (Continued)
eliminating all common mode voltage errors. This approach
works well, and is often a good choice in high precision
work. The amplifiers in this example, CMOS chopper-stabilized units, essentially eliminate offset drift with time and
temperature. Trade-offs compared to an instrumentation
amplifier approach include complexity and the requirement for a negative supply. Figure 7 is similar, except that
low noise bipolar amplifiers are used. This circuit trades
slightly higher DC offset drift for lower noise and is a good
candidate for stable resolution of small, slowly varying
measurands. Figure 8 employs chopper-stabilized A1 to
AN43-4
reduce Figure 7’s already small offset error. A1 measures
the DC error at A2’s inputs and biases A1’s offset pins to
force offset to a few microvolts. The offset pin biasing at
A2 is arranged so A1 will always be able to find the servo
point. The 0.01μF capacitor rolls off A1 at low frequency,
with A2 handling high frequency signals. Returning A2’s
feedback string to the bridges mid-point eliminates A4’s
offset contribution. If this was not done A4 would require
a similar offset correction loop. Although complex, this
approach achieves less than 0.05μV/°C drift, 1nV√Hz noise
and CMRR exceeding 160dB.
an43f
Page 5
10k
ZERO
301k*
15V 15V
A2
LT1010
350Ω STRAIN GAGE
PRESSURE TRANSDUCER
15V
+
A3
LT1101
A = 100
–
1/2 LT1078
100k
A1A
+
–
0.33
LT1021
+
A1B
1/2 LT1078
–
Application Note 43
15V
10V
10V RATIO
OUTPUT
OUTPUT
0V TO 10V =
0 TO 250 PSI
10k*
*1% FILM RESISTOR
PRESSURE TRANSDUCER =
BLH #DHF-350—3MV/VOLT GAIN FACTOR
Figure 5. A Practical Instrumentation Amplifier-Based Bridge Circuit
0.02
A1
LTC1150
*1% FILM RESISTOR
Figure 6. Servo Controlling Bridge Drive Eliminates Common Mode Voltage
3.65k*
1k – GAIN
AN43 F05
350Ω
15V
1/2W
10μF
+
OUTPUT
TRIM
100Ω
250* 100k*
RATIO
OUTPUT
–
350Ω
100k
–
+
1k
STRAIN
GAUGE
BRIDGE
3MV/V
TYPE
Q1
2N2905
–15V
LTC1150
+
A2
AN43 F06
OUTPUT
0V TO 10V
Single Supply Common Mode Suppression Circuits
The common mode suppression circuits shown require a
negative power supply. Often, such circuits must function
in systems where only a positive rail is available. Figure 9
®
shows a way to do this. A2 biases the LTC
1044 positiveto-negative converter. The LTC1044’s output pulls the
bridge’s output negative, causing A1’s input to balance at
0V. This local loop permits a single-ended amplifier (A2)
to extract the bridge’s output signal. The 100k-0.33μF RC
filters noise and A2’s gain is set to provide the desired
output scale factor. Because bridge drive is derived from
the LT1034 reference, A2’s output is not affected by supply
shifts. The LT1034’s output is available for ratio operation.
Although this circuit works nicely from a single 5V rail the
transducer sees only 2.4V of drive. This reduced drive
an43f
AN43-5
Page 6
Application Note 43
15V
LT1021-5
350Ω
BRIDGE
3
5V
2
2
–
A3
LT1028
3
+
–15V
+
–
15V
7
A1
LT1007
4
–15V
7
6
4
330Ω
6
RATIO
REFERENCE
OUT
15V
330Ω
301k*
10k
ZERO
TRIM
*1% FILM RESISTOR
3
2
+
LT1028
–
A3
–15V
7
6
4
1μF
5k
GAIN
TRIM
Figure 7. Low Noise Bridge Amplifier with Common Mode Suppression
15V
0V TO 10V
OUTPUT
30.1k*
49.9Ω*
AN43 F07
LT1021-5
350Ω
BRIDGE
*1% FILM RESISTOR
3
+
5V
2
–
15V
2
–
A4
LT1028
3
+
–15V
A3
LT1007
7
4
–15V
7
4
330Ω
6
REFERENCE
OUT
+
301k*
10k
ZERO
TRIM
6
330Ω
A1
LTC1150
–
0.01
15V
130Ω100k 30k
1
7
+
LT1028
–
A2
–15V
8
4
5k
GAIN
TRIM
68Ω
15V
OUTPUT
30.1k*
(A = 1000)
49.9Ω*
AN43 F08
AN43-6
Figure 8. Low Noise, Chopper-Stabilized Bridge Amplifier with Common Mode Suppression
an43f
Page 7
Application Note 43
1.2V REFERENCE OUTPUT
TO A/D CONVERTER
FOR RATIOMETRIC
OPERATION. 0.1mA MAXIMUM
10k
ZERO
TRIM
+
A2
1/2 LT1078
39k
0.1μF
–
A1
1/2 LT1078
5V
220
LT1034
1.2V
+
PRESSURE
TRANSDUCER
350Ω
D
E A
C
2.4V
301k
100k
0.33μF
–
100μF
8
+
V
2
+
CAP
+
3
LTC1044
CAP
GND
V
–
OUT
5
LV
100μF
+
64
*1% FILM RESISTOR
PRESSURE TRANSDUCER-BLH/DHF-350
CIRCLED LETTER IS PIN NUMBER
= 350Ω
Z
IN
0.047μF
Figure 9. Single Supply Bridge Amplifier with Common Mode Suppression
OUTPUT
0V TO 3.5V =
0 TO 350 PSI
2k
GAIN
TRIM
46k*
100Ω*
AN43 F09
40Ω
5V
10μF
+
5k
OUTPUT
TRIM
5k*
1M*
–
A2
1/2 LT1078
+
OUTPUT
0V TO 3V
AN43 F10
10μF
350Ω
3k
STRAIN
GAUGE
BRIDGE
3mV/V
TYPE
Q2
2N2222
100k
+
A1
1/2 LT1078
0.02
200k
1
FB/SD
2
+
+
CAP
LT1054
3
GND
4
–
CAP
V
*1% FILM RESISTOR
OUT
5V
8
+
V
+
5
–
100μF
SOLID
TANTALUM
100k
100μF
+
8V
10k
1μF
Figure 10. High Resolution Version of Figure 9. Bipolar Voltage Converter Gives Greater Bridge Drive, Increasing Output Signal
results in lower transducer outputs for a given measurand
value, effectively magnifying amplifier offset drift terms.
The limit on available bridge drive is set by the CMOS
LTC1044’s output impedance. Figure 10’s circuit employs
a bipolar positive-to-negative converter which has much
lower output impedance. The biasing used permits 8V to
appear across the bridge, requiring the 100mA capability
LT1054 to sink about 24mA. This increased drive results
in a more favorable transducer gain slope, increasing
signal-to-noise ratio.
an43f
AN43-7
Page 8
Application Note 43
Switched-Capacitor Based Instrumentation Amplifiers
Switched-capacitor methods are another way to signal
condition bridge outputs. Figure 11 uses a flying capacitor
configuration in a very high precision-scale application. This
design, intended for weighing human subjects, will resolve
0.01 pound at 300.00 pounds full scale. The strain gauge
based transducer platform is excited at 10V by the LT1021
reference, A1 and A2. The LTC1043 switched-capacitor
building block combines with A3, forming a differential
input chopper-stabilized amplifier. The LTC1043 alternately
connects the 1μF flying capacitor between the strain gauge
bridge output and A3’s input. A second 1μF unit stores
the LTC1043 output, maintaining A3’s input at DC. The
LTC1043’s low charge injection maintains differential to
single-ended transfer accuracy of about 1ppm at DC and
low frequency. The commutation rate, set by the 0.01μF
capacitor, is about 400Hz. A3 takes scaled gain, providing
3.0000V for 300.00 pounds full-scale output.
15V
15V
LT1021
10V
+
–
7
13
A1
LT1012
LTC1043
15V
4
11
1μF
12
16 17
0.01
14
8
A2
LT1010
301k
1% FILM
1μF
5.8k*
2.5k
ZERO
80k*
15V
+
A3
LTC1150
–
0.68μF
10k
1% FILM
50k
GAIN
0.68/2μF = POLYSTYRENE
* = ULTRONIX 105A RESISTOR
STRAIN BRIDGE PLATFORM = NCI 3224
15k
25Ω
135k* 1k
1k*
100k
The extremely high resolution of this scale requires filtering
to produce useful results. Very slight body movement acting
on the platform can cause significant noise in A3’s output.
This is dramatically apparent in Figure 12’s tracings. The
total force on the platform is equal to gravity pulling on
the body (the “weight”) plus any additional accelerations
within or acting upon the body. Figure 12 (Trace B) clearly
shows that each time the heart pumps, the acceleration due
to the blood (mass) moving in the arteries shows up as
“weight”. To prove this, the subject gets off the scale and
runs in place for 15 seconds. When the subject returns to
the platform the heart should work harder. Trace A confirms
this nicely. The exercise causes the heart to work harder,
forcing a greater acceleration-per-stroke.
Note 2: Cardiology aficionados will recognize this as a form of
Ballistocardiograph (from the Greek “ballein”—to throw, hurl or eject
and “kardia,” heart). A significant amount of effort was expended in
attempts to reliably characterize heart conditions via acceleration detection
methods. These efforts were largely unsuccessful when compared against
the reliability of EKG produced data. See references for further discussion.
15V
–
A5A
1/2 LT1018
+
–
LT1012
+
15V
–
A5B
1/2 LT1018
+
RC FILTER
680k
39k 2μF
2k
2
10V RATIO
OUTPUT
HEARTBEAT
OUTPUT
A4
WEIGHT
OUTPUT
0V TO 3.0000V =
0LB TO 300.00LB
AN43 F11
AN43-8
= HEWLETT-PACKARD HSSR-8200
Figure 11. High Precision Scale for Human Subjects
an43f
Page 9
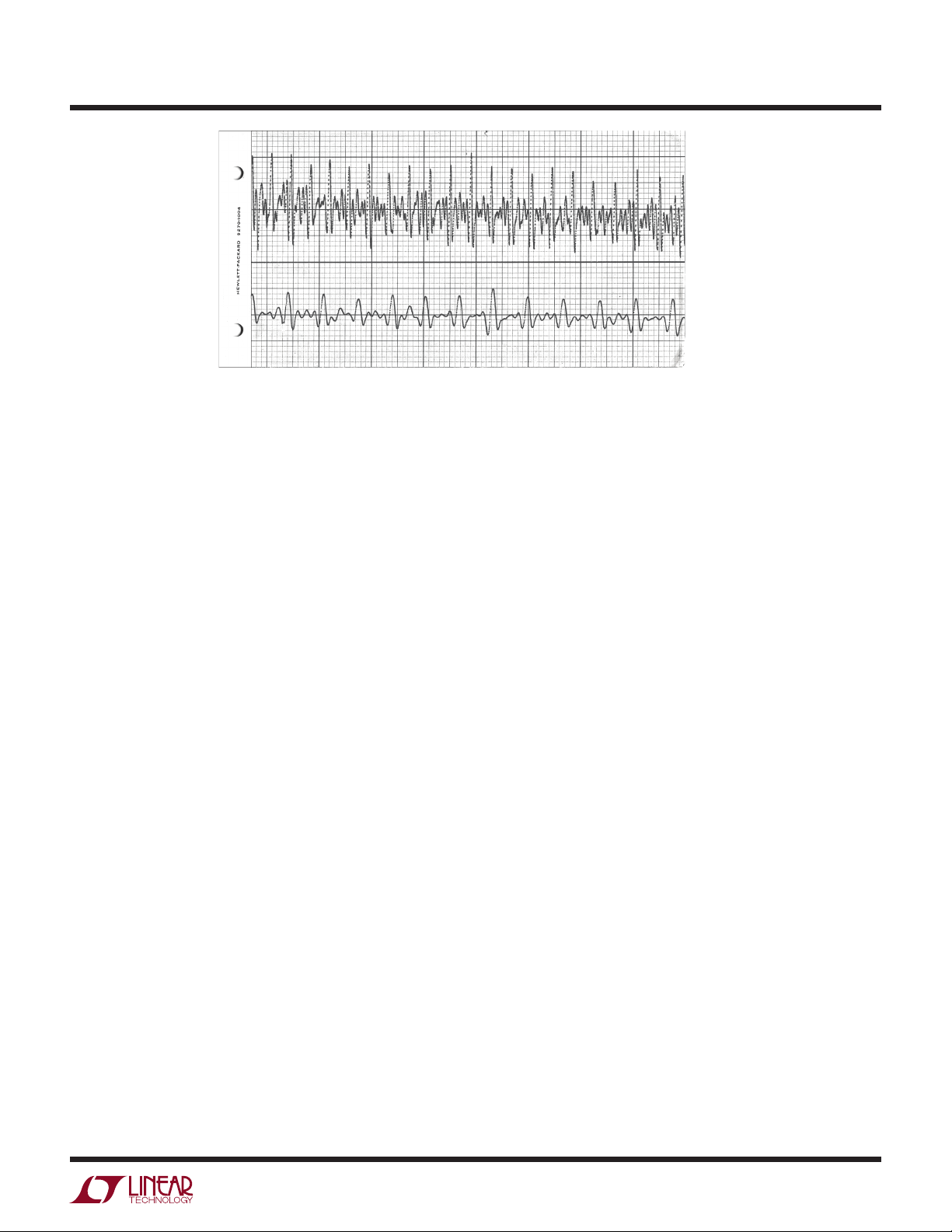
A = 0.45LB/FULL SCALE
B = 0.45LB/FULL SCALE
Application Note 43
HORIZ = 1s/INCH
Figure 12. High Precision Scale’s Heartbeat Output. Trace B Shows Subject at Rest; Trace A After Exercise. Discontinuous Components
in Waveforms Leading Edges Are Due to XY Recorder Slew Limitations
Another source of noise is due to body motion. As the
body moves around, its mass doesn’t change but the
instantaneous accelerations are picked up by the platform
and read as “weight” shifts.
All this seems to make a 0.01 pound measurement meaningless. However, filtering the noise out gives a time averaged value. A simple RC lowpass will work, but requires
excessively long settling times to filter noise fundamentals
in the 1Hz region. Another approach is needed.
A4, A5 and associated components form a filter which
switches its time constant from short to long when the
output has nearly arrived at the final value. With no weight
on the platform A3’s output is zero. A4’s output is also
zero, A5B’s output is indeterminate and A5A’s output is
low. The MOSFET opto-couplers LED comes on, putting the
RC filter into short time constant mode. When someone
gets on the scale A3’s output rises rapidly. A5A goes high,
but A5B trips low, maintaining the RC filter in its short
time constant mode. The 2μF capacitor charges rapidly,
the 2μF capacitor, returning A4’s output rapidly to zero.
The bias string at A5A’s input maintains the scale in fast
time constant mode for weights below 0.50 pounds. This
permits rapid response when small objects (or persons)
are placed on the platform. To trim this circuit, adjust
the zero potentiometer for 0V out with no weight on the
platform. Next, set the gain adjustment for 3.0000V out
for a 300.00 pound platform weight. Repeat this procedure
until both points are fixed.
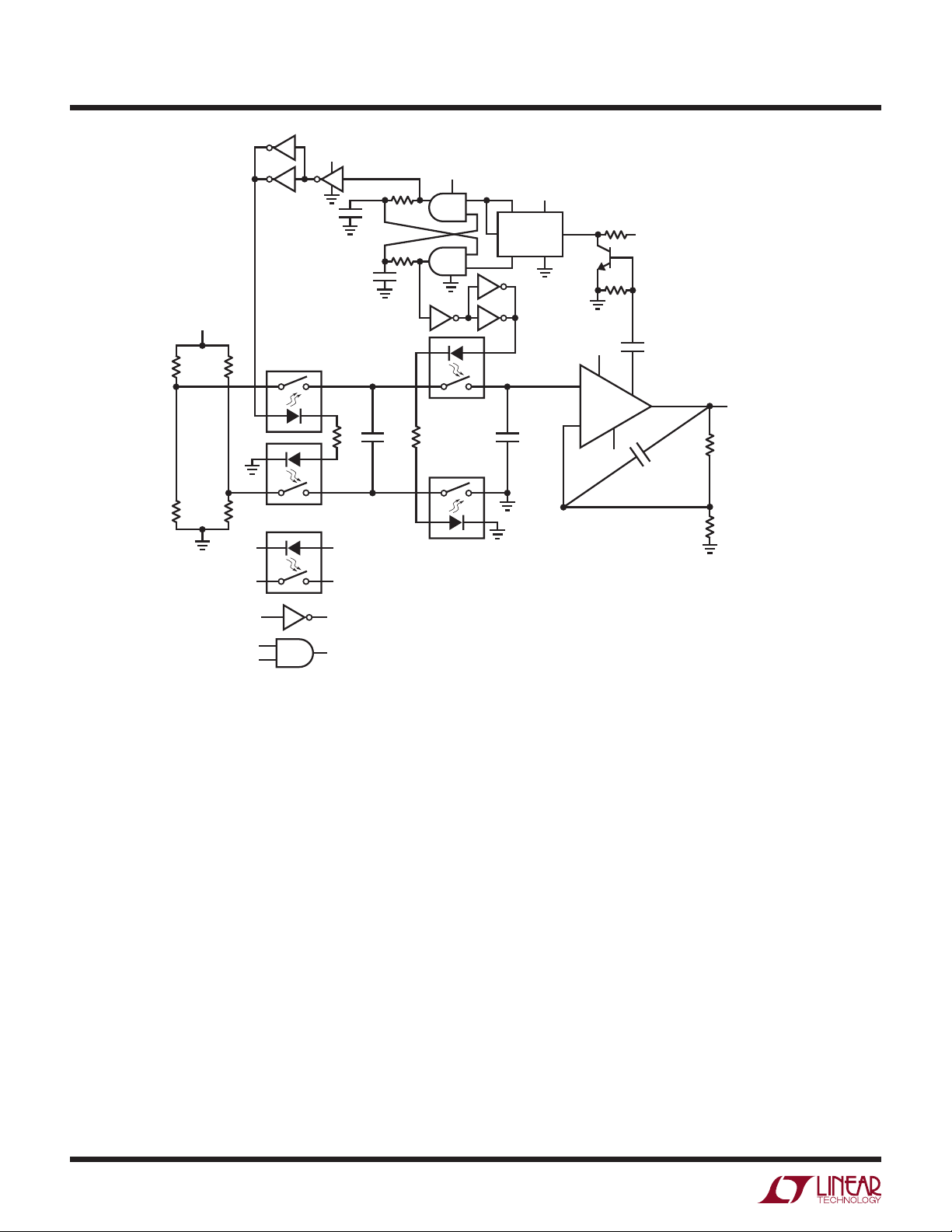
Optically Coupled Switched-Capacitor
Instrumentation Amplifier
Figure 13 also uses optical techniques for performance
enhancement. This switched-capacitor based instrumentation amplifier is applicable to transducer signal
conditioning where high common mode voltages exist.
The circuit has the low offset and drift of the LTC1150
but also incorporates a novel switched-capacitor “front
end” to achieve some specifications not available in a
conventional instrumentation amplifier.
AN43 F12
and A4 quickly settles to final value ± body motion and
heartbeat noise. A5B’s negative input sees 1% attenuation
from A3; its positive input does not. This causes A5B to
switch high when A4’s output arrives within 1% of final
value. The opto-coupler goes off and the filter switches
into long time constant mode, eliminating noise in A4’s
output. The 39k resistor prevents overshoot, ensuring
monotonic A4 outputs. When the subject steps off the
scale A3 quickly returns to zero. A5A goes immediately
Common mode rejection ratio at DC for the front end
exceeds 160dB. The amplifier will operate over a ±200V
common mode range and gain accuracy and stability are
limited only by external resistors. A1, a chopper stabilized
unit, sets offset drift at 0.05μV/°C. The high common
mode voltage capability of the design allows it to withstand transient and fault conditions often encountered in
industrial environments.
low, turning on the opto-coupler. This quickly discharges
an43f
AN43-9
Page 10
Application Note 43
15V
ACQUIRE
0.05
10k
10k
0.05
15V
15V
Q
74C74
DCK
÷ 4
Q
2N3904
10k
10k
15V
+E BRIDGE
+
S1
C1
2k 2k
1μF
S2
–
= HEWLETT-PACKARD HSSR-8200
= 1/6 74C04
= 1/4 74C02
* = 1% FILM RESISTOR
Figure 13. Floating Input Bridge Instrumentation Amplifier with 200V Common Mode Range
The circuit’s inputs are fed to LED-driven optically-coupled
MOSFET switches, S1 and S2. Two similar switches, S3
and S4, are in series with S1 and S2. CMOS logic functions, clocked from A1’s internal oscillator, generate nonoverlapping clock outputs which drive the switch’s LEDs.
When the “acquire pulse” is high, S1 and S2 are on and
C2 acquires the differential voltage at the bridge’s output.
During this interval, S3 and S4 are off. When the acquire
pulse falls, S1 and S2 begin to go off. After a delay to allow
S1 and S2 to fully open, the “read pulse” goes high, turning on S3 and S4. Now C1 appears as a ground-referred
voltage source which is read by A1. C2 allows A1’s input
to retain C1’s value when the circuit returns to the acquire
mode. A1 provides the circuit’s output. Its gain is set in
normal fashion by feedback resistors. The 0.33μF feedback
capacitor sets roll-off. The differential-to-single-ended
transition performed by the switches and capacitors means
that A1 never sees the input’s common mode signal. The
READ
S3
15V
+
LTC1150
C2
1μF
S4
–
A1
–15V
100pF
CLK OUT
OUTPUT
100k*
0.33
100Ω*
AN43 F13
breakdown specification of the optically-driven MOSFET
switch allows the circuit to withstand and operate at common mode levels of ±200V. In addition, the optical drive
to the MOSFETs eliminates the charge injection problems
common to FET switched-capacitive networks.
Platinum RTD Resistance Bridge Circuits
Platinum RTDs are frequently used in bridge configurations for temperature measurement. Figure 14’s circuit is
highly accurate and features a ground referred RTD. The
ground connection is highly desirable for noise rejection.
The bridges RTD leg is driven by a current source while
the opposing bridge branch is voltage biased. The current
drive allows the voltage across the RTD to vary directly with
its temperature induced resistance shift. The difference
between this potential and that of the opposing bridge leg
forms the bridges output.
an43f
AN43-10
Page 11
15V
27k
10k*
LT1009
2.5V
2k
* = 1% FILM RESISTOR
= ROSEMOUNT 118MFRTD
R
P
15V
+
A1A
1/2 LT1078
–
0.1μF
LT1101
A = 10
Application Note 43
274k*
15V
88.7Ω*
R
P
100Ω AT
0°C RTD
50k
ZERO
8.25k*
–
LT1101
A = 10
+
A3
LINEARITY
+
A2
–
250k*
+
5k
A1B
1/2 LT1078
–
0V TO 10V
0°C TO 400°C ±0.05°C
2k
GAIN
13k*
10k*
AN43 F14
OUT
=
Figure 14. Linearized Platinum RTD Bridge. Feedback to Bridge from A3 Linearizes the Circuit
A1A and instrumentation amplifier A2 form a voltage-controlled current source. A1A, biased by the LT1009 reference, drives current through the 88.7Ω resistor and the
RTD. A2, sensing differentially across the 88.7Ω resistor,
closes a loop back to A1A. the 2k-0.1μF combination sets
amplifier roll-off, and the configuration is stable. Because
A1A’s loop forces a fixed voltage across the 88.7Ω resistor,
the current through R
is constant. A1’s operating point is
P
primarily fixed by the 2.5V LT1009 voltage reference.
The RTD’s constant current forces the voltage across it
to vary with its resistance, which has a nearly linear positive temperature coefficient. The nonlinearity could cause
several degrees of error over the circuit’s 0°C to 400°C
operating range. The bridges output is fed to instrumentation amplifier A3, which provides differential gain while
simultaneously supplying nonlinearity correction. The
correction is implemented by feeding a portion of A3’s
output back to A1’s input via the 10k-250k divider. This
causes the current supplied to R
to slightly shift with
P
its operating point, compensating sensor nonlinearity to
within ±0.05°C. A1B, providing additional scaled gain,
furnishes the circuit output.
To calibrate this circuit, substitute a precision decade
box (e.g., General Radio 1432k) for R
. Set the box to
P
the 0°C value (100.00Ω) and adjust the offset trim for a
0.00V output. Next, set the decade box for a 140°C output
(154.26Ω) and adjust the gain trim for a 3.500V output
reading. Finally, set the box to 249.0Ω (400.00°C) and trim
the linearity adjustment for a 10.000V output. Repeat this
sequence until all three points are fixed. Total error over
the entire range will be within ±0.05°C. The resistance
values given are for a nominal 100.00Ω (0°C) sensor.
Sensors deviating from this nominal value can be used
by factoring in the deviation from 100.00Ω. This deviation, which is manufacturer specified for each individual
sensor, is an offset term due to winding tolerances during
fabrication of the RTD. The gain slope of the platinum is
primarily fixed by the purity of the material and has a very
small error term.
an43f
AN43-11
Page 12
Application Note 43
Figure 15 is functionally identical to Figure 14, except that
A2 and A3 are replaced with an LTC1043 switched-capacitor
building block. The LTC1043 performs the differentialto-single-ended transitions in the current source and
bridge output amplifier. Value shifts in the current source
and output stage reflect the LTC1043’s lack of gain. The
primary trade-off between the two circuits is component
count versus cost.
Digitally Corrected Platinum Resistance Bridge
The previous examples rely on analog techniques to
achieve a precise, linear output from the platinum RTD
bridge. Figure 16 uses digital corrections to obtain similar results. A processor is used to correct residual RTD
27k
15V
10k*
LT1009
2.5V
15V
+
1/2 LT1078
–
0.1μF
nonlinearities. The bridges inherent nonlinear output is
also accommodated by the processor.
The LT1027 drives the bridge with 5V. The bridge differential
output is extracted by instrumentation amplifier A1. A1’s
output, via gain scaling stage A2, is fed to the LTC1290
12-bit A/D. The LTC1290’s raw output codes reflect the
bridges nonlinear output versus temperature. The processor corrects the A/D output and presents linearized,
calibrated data out. RTD and resistor tolerances mandate
zero and full-scale trims, but no linearity correction is
necessary. A2’s analog output is available for feedback
control applications. The complete software code for the
68HC05 processor, developed by Guy M. Hoover, appears
in Figure 17.
250k*
15V
2k
1μF
15V
4
7
13
0.01μF
8
11
1μF
12
14
1716
887Ω*
R
P
100Ω
AT 0°C
274k*
50k
ZERO
8.25k*
4
1/2 LTC1043
5
2
3
15
* = 1% FILM RESISTOR
R
6
1μF
18
= ROSEMOUNT 118MFRTD
P
5
1μF
6
+
1/2 LT1078
–
GAIN
ADJUST
0°C TO 400°C ±0.05°C
7
2k
LINEARITY
13k*
619Ω*
AN43 F15
0V TO 10V
5k
OUT
=
Figure 15. Switched-Capacitor-Based Version of Figure 14
AN43-12
an43f
Page 13
Application Note 43
Thermistor Bridge
Figure 18, another temperature measuring bridge, uses
a thermistor as a sensor. The LT1034 furnishes bridge
excitation. The 3.2k and 6250Ω resistors are supplied
with the thermistor sensor. The networks overall response
is linearly related to the thermistor’s sensed temperature.
The network forms one leg of a bridge with resistors furnishing the opposing leg. A trim in this opposing leg sets
bridge output to zero at 0°C. Instrumentation amplifier A1
takes gain with A2 providing additional trimmed gain to
furnish a calibrated output. Calibration is accomplished
in similar fashion to the platinum RTD circuits, with the
linearity trim deleted.
Low Power Bridge Circuits
Low power operation of bridge circuits is becoming increasingly common. Many bridge-based transducers are low
impedance devices, complicating low power design. The
most obvious way to minimize bridge power consumption
is to restrict drive to the bridge. Figure 19a is identical to
Figure 5, except that the bridge excitation has been reduced to 1.2V. This cuts bridge current from nearly 30mA
to about 3.5mA. The remaining circuit elements consume
negligible power compared to this amount. The trade-off
is the sacrifice in bridge output signal. The reduced drive
causes commensurately lowered bridge outputs, making
the noise and drift floor a greater percentage of the signal.
More specifically, a 0.01% reading of a 10V powered 350Ω
strain gauge bridge requires 3μV of stable resolution. At
1.2V drive, this number shrinks to a scary 360nV.
Figure 19b is similar, although bridge current is reduced
below 700μA. This is accomplished by using a semiconductor-based bridge transducer. These devices have
significantly higher input resistance, minimizing power
dissipation. Semiconductor-based pressure transducers
have major cost advantages over bonded strain gauge
types, although accuracy and stability are reduced. Appendix A, “Strain Gauge Bridges,” discusses trade-offs
and theory of both technologies.
5V
12k*
1k*
OUT
12.5k*
500k
ZERO°C
TRIM
–
+
R
PLAT
*TRW-IRC MAR-6 RESISTOR—0.1%
**1% FILM RESISTOR
= 1kΩ AT 0°C—ROSEMOUNT #118MF
R
PLAT
15V
A1
LT1101
A = 10
+
LT1006
–
+
10μF
15V
V
A2
30.1k**
1μF
3.92M**
AN43 F16
LTC1290
500k
400°C
TRIM
REF
+V
15V
SERIAL OUT TO
68HC05 PROCESSOR
LT102715V
Figure 16. Digitally Linearized Platinum RTD Signal Conditioner
an43f
AN43-13
Page 14

Application Note 43
* PLATINUM RTD LINEARIZATION PROGRAM (0.0 TO 400.0 DEGREES C)
* WRITTEN BY GUY HOOVER LINEAR TECHNOLOGY CORPORATION
* 3/14/90
* N IS THE NUMBER OF SEGMENTS THAT RTD RESPONSE IS DIVIDED INTO
* TEMPERATURE (DEG. C*10)=M*X+B
* M IS SLOPE OF RTD RESPONSE FOR A GIVEN SEGMENT
* X IS A/D OUTPUT MINUS SEGMENT END POINT
* B IS SEGMENT START POINT IN DEGREES C *10.
*
*****************************************************************************************
* LOOK UP TABLES
*
ORG $1000
* TABLE FOR SEGMENT END POINTS IN DECIMAL
* X IS FORMED BY SUBTRACTING PROPER SEGMENT END POINT FROM A/D OUTPUT
FDB 60,296,527,753,976,1195,1410,1621,1829,2032
FDB 2233,2430,2623,2813,3000,3184,3365,3543,3718,3890
ORG $1030
* TABLE FOR M IN DECIMAL
* M IS SLOPE OF RTD OVER A GIVEN TEMPERATURE RANGE
FDB 3486,3535,3585,3685,3735,3784,3884,3934,3984,4083
FDB 4133,4232,4282,4382,4432,4531,4581,4681,4730,4830
ORG $1060
* TABLE FOR B IN DECIMAL
* B IS DEGREES C TIMES TEN
FDB 0,200,400,600,800,1000,1200,1400,1600,1800
FDB 2000,2200,2400,2600,2800,3000,3200,3400,3600,3800
ORG $10FF
FCB 39 (N*2)-1 IN DECIMAL
*
* END LOOK UP TABLES
*****************************************************************************************
* BEGIN MAIN PROGRAM
*
ORG $0100
LDA #$F7 CONFIGURATION DATA FOR PORT C DDR
STA $06 LOAD CONFIGURATION DATA INTO PORT C
BSET 0,$02 INITIALIZE B0 PORT C
MES90L NOP
LDA #$2F DIN WORD FOR 1290 CH4 WITH RESPECT
* TO CH5, MSB FIRST, UNIPOLAR, 16 BITS
STA $50 STORE DIN WORD IN DIN BUFFER
JSR READ90 CALL READ90 SUBROUTINE (DUMMY READ)
JSR READ90 CALL READ90 SUBROUTINE (MSBS IN $61 LSBS IN $62)
LDX $10FF LOAD SEGMENT COUNTER INTO X \ FOR N=20 TO 1
DOAGAIN LDA $1000,X LOAD LSBS OF SEGMENT N \
STA $55 STORE LSBS IN $55 \
DECX DECREMENT X \
LDA $1000,X LOAD MSBS OF SEGMENT N \
STA $54 STORE MSBS IN $54 \ FIND B
JSR SUBTRCT CALL SUBTRCT SUBROUTINE /
BPL SEGMENT IF RESULT IS PLUS GOTO SEGMENT /
JSR ADDB CALL ADDB SUBROUTINE /
DECX DECREMENT X /
JMP DOAGAIN GOTO CODE AT LABEL DOAGAIN / NEXT N
AN43-14
Figure 17. Software Code for 68HC05 Processor-Based RTD Linearization
an43f
Page 15

Application Note 43
*
*
*
*
*
SEGMENT LDA $1030,X LOAD MSBS OF SLOPE \
STA $54 STORE MSBS IN $54 \
INCX INCREMENT X \ M*X
LDA $1030,X LOAD LSBS OF SLOPE /
STA $55 STORE LSBS IN $55 /
JSR TBMULT CALL TBMULT SUBROUTINE /
LDA $1060,X LOAD LSBS OF BASE TEMP \
STA $55 STORE LSBS IN $55 \
DECX DECREMENT X > B ADDED TO M*X
LDA $1060,X LOAD MSBS OF BASE TEMP /
STA $54 STORE MSBS IN $54 /
JSR ADDB CALL ADDB SUBROUTINE
* TEMPERATURE IN DEGREES C * 10 IS IN $61 AND $62
* END MAIN PROGRAM
*****************************************************************************************
*
*
JMP MES90L RUN MAIN PROGRAM IN CONTINUOUS LOOP
*
*****************************************************************************************
* SUBROUTINES BEGIN HERE
*
*****************************************************************************************
* READ90 READS THE LTC1290 AND STORES THE RESULT IN $61 AND $62
*
READ90 LDA #$50 CONFIGURATION DATA FOR SPCR \
STA $0A LOAD CONFIGURATION DATA > CONFIGURE PROCESSOR
LDA $50 LOAD DIN WORD INTO THE ACC /
BCLR 0,$02 BIT 0 PORT C GOES LOW (CS GOES LOW) \
STA $0C LOAD DIN INTO SPI DATA REG. START TRANSFER. |
BACK90 TST $0B TEST STATUS OF SPIF |
BPL BACK90 LOOP TO PREVIOUS INSTRUCTION IF NOT DONE |
LDA $0C LOAD CONTENTS OF SPI DATA REG. INTO ACC |
STA $0C START NEXT CYCLE |
STA $61 STORE MSBS IN $61 | XFER
BACK92 TST $0B TEST STATUS OF SPIF | DATA
BPL BACK92 LOOP TO PREVIOUS INSTRUCTION IF NOT DONE |
BSET 0,$02 SET BIT 0 PORT C (CS GOES HIGH) |
LDA $0C LOAD CONTENTS OF SPI DATA REG INTO ACC |
STA $62 STORE LSBS IN $62 /
LDA #$04 LOAD COUNTER WITH NUMBER OF SHIFTS \
SHIFT CLC CLEAR CARRY \
ROR $61 ROTATE MSBS RIGHT THROUGH CARRY \ RIGHT
ROR $62 ROTATE LSBS RIGHT THROUGH CARRY / JUSTIFY
DECA DECREMENT COUNTER / DATA
BNE SHIFT IF NOT DONE SHIFTING THEN REPEAT LOOP /
RTS RETURN TO MAIN PROGRAM
*
* END READ90
*****************************************************************************************
Figure 17. Software Code for 68HC05 Processor-Based RTD Linearization (Continued)
an43f
AN43-15
Page 16

Application Note 43
*****************************************************************************************
*
* SUBTRCT SUBTRACTS $54 AND $55 FROM $61 AND $62. RESULTS IN $61 AND $62
*
SUBTRCT LDA $62 LOAD LSBS
SUB $55 SUBTRACT LSBS
STA $62 STORE REMAINDER
LDA $61 LOAD MSBS
SBC $54 SUBTRACT W/CARRY MSBS
STA $61 STORE REMAINDER
RTS RETURN TO MAIN PROGRAM
*
* END SUBTRCT
*****************************************************************************************
*****************************************************************************************
*
*ADDB RESTORES $61 AND $62 TO ORIGINAL VALUES AFTER SUBTRCT HAS BEEN PERFORMED
*
ADDB LDA $62 LOAD LSBS
ADD $55 ADD LSBS
STA $62 STORE SUM
LDA $61 LOAD MSBS
ADC $54 ADD W/CARRY MSBS
STA $61 STORE SUM
RTS RETURN TO MAIN PROGRAM
*
* END ADDB
*****************************************************************************************
*****************************************************************************************
*
*TBMULT MULTIPLIES CONTENTS OF $61 AND $62 BY CONTENTS OF $54 AND $55.
*16 MSBS OF RESULT ARE PLACED IN $61 AND $62
*
TBMULT CLR $68 CLEAR CONTENTS OF $68 \
CLR $69 CLEAR CONTENTS OF $69 \ RESET TEMPORARY
CLR $6A CLEAR CONTENTS OF $6A / RESULT REGISTERS
CLR $6B CLEAR CONTENTS OF $6B /
STX $58 STORE CONTENTS OF X IN $58. TEMPORARY HOLD REG. FOR X
LSL $62 MULTIPLY LSBS BY 2 \
ROL $61 MULTIPLY MSBS BY 2 \
LSL $62 MULTIPLY LSBS BY 2 \
ROL $61 MULTIPLY MSBS BY 2 \ MULTIPLY $61 AND $62 BY 16
LSL $62 MULTIPLY LSBS BY 2 / FOR SCALING PURPOSES
ROL $61 MULTIPLY MSBS BY 2 /
LSL $62 MULTIPLY LSBS BY 2 /
ROL $61 MULTIPLY MSBS BY 2 /
LDA $62 LOAD LSBS OF 1290 INTO ACC
LDX $55 LOAD LSBS OF M INTO X
MUL MULTIPLY CONTENTS OF $55 BY CONTENTS OF $62
STA $6B STORE LSBS IN $6B
STX $6A STORE MSBS IN $6A
LDA $62 LOAD LSBS OF 1290 INTO ACC
LDX $54 LOAD MSBS OF M INTO X
MUL MULTIPLY CONTENTS OF $54 BY CONTENTS OF $62
ADD $6A LSBS OF MULTIPLY ADDED TO $6A
STA $6A STORE BYTE
TXA TRANSFER X TO ACC
AN43-16
Figure 17. Software Code for 68HC05 Processor-Based RTD Linearization (Continued)
an43f
Page 17
Application Note 43
ADC $69 ADD NEXT BYTE
STA $69 STORE BYTE
LDA $61 LOAD MSBS OF 1290 INTO ACC
LDX $55 LOAD LSBS OF M INTO X
MUL MULTIPLY CONTENTS OF $55 BY CONTENTS OF $61
ADD $6A ADD NEXT BYTE
STA $6A STORE BYTE
TXA TRANSFER X TO ACC
ADC $69 ADD NEXT BYTE
STA $69 STORE BYTE
LDA $61 LOAD MSBS OF 1290 INTO ACC
LDX $54 LOAD MSBS OF M INTO X
MUL MULTIPLY CONTENTS OF $54 BY CONTENTS OF $61
ADD $69 ADD NEXT BYTE
STA $69 STORE BYTE
TXA TRANSFER X TO ACC
ADC $68 ADD NEXT BYTE
STA $68 STORE BYTE
LDA $6A LOAD CONTENTS OF $6A INTO ACC
BPL NNN IF NO CARRY FROM $6A GOTO LABEL NNN
LDA $69 LOAD CONTENTS OF $69 INTO ACC
ADD #$01 ADD 1 TO ACC
STA $69 STORE IN $69
LDA $68 LOAD CONTENTS OF $68 INTO ACC
ADC #$00 FLOW THROUGH CARRY
STA $68 STORE IN $68
NNN LDA $68 LOAD CONTENTS OF $68 INTO ACC
STA $61 STORE MSBS IN $61
LDA $69 LOAD CONTENTS OF $69 INTO ACC
STA $62 STORE IN $62
LDX $58 RESTORE X REGISTER FROM $58
RTS RETURN TO MAIN PROGRAM
*
* END TBMULT
*****************************************************************************************
*
* END
*****************************************************************************************
Figure 17. Software Code for 68HC05 Processor-Based RTD Linearization (Continued)
33k
15V
T1
THERMISTOR
LT1034
1.235V
3.2k
6250Ω
1k
0°C TRIM
16.2k*
15V
+
A1
LT1101
A = 10
–
107k*
T1 = YELLOW SPRINGS #44201
* = 1% FILM RESISTOR
+
LT1006
–
15V
A2
51.1k*
0V TO 10V =
0°C TO 100.0°C ±0.25°C
500Ω
100°C
TRIM
100k*
AN43 F18
Figure 18. Linear Output Thermistor Bridge. Thermistor Network Provides Linear Bridge Output
an43f
AN43-17
Page 18

Application Note 43
10k
ZERO
301k*
9V
9V
100k
+
1/2 LT1078
–
350Ω STRAIN GAGE
PRESSURE TRANSDUCER
9V
LT1004
1.2V
+
LT1101
A = 100
–
* = 1% FILM RESISTOR
PRESSURE TRANSDUCER = BLH #DHF-350
100k
(19a)
0.33
+
1/2 LT1078
–
1.2V RATIO
OUTPUT
OUTPUT
0V TO 5V =
0 TO 350PSI
100k*
7.5k*
1000 – GAIN
AN43 F19a
9V
9V
100k
+
1/2 LT1078
–
LT1004
1.2V
+
LT1101
A = 100
–
* = 1% FILM RESISTOR
PRESSURE TRANSDUCER = MOTOROLA MPX2200AP
ZIN = 1800Ω
100k
0.33
+
1/2 LT1078
–
OUTPUT
0V TO 5V =
0 TO 30PSI
100k*
10k*
2k – GAIN
AN43 F19b
(19b)
Figure 19. Power Reduction by Reducing Bridge Drive. Circuit is a Low Power Version of Figure 5
AN43-18
an43f
Page 19
Application Note 43
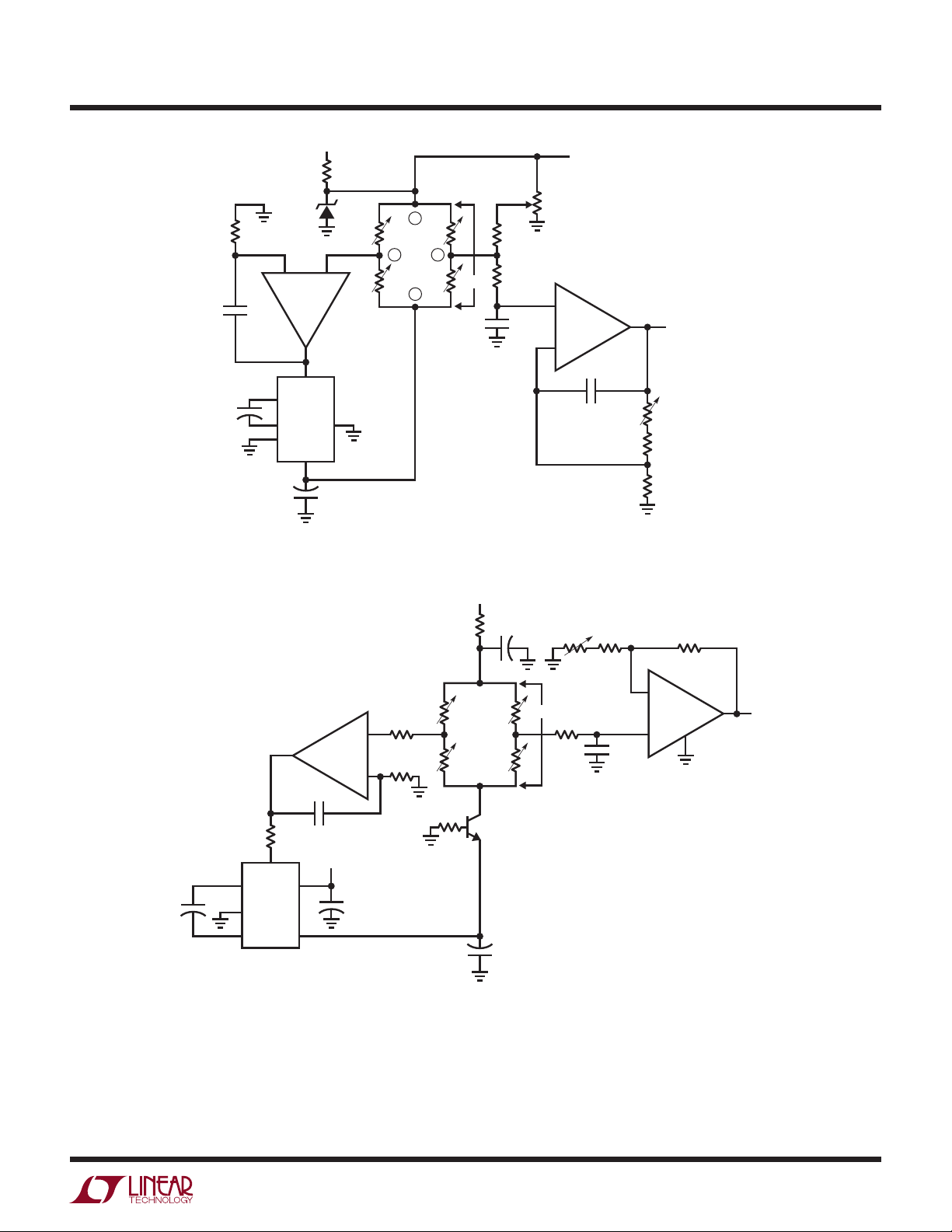
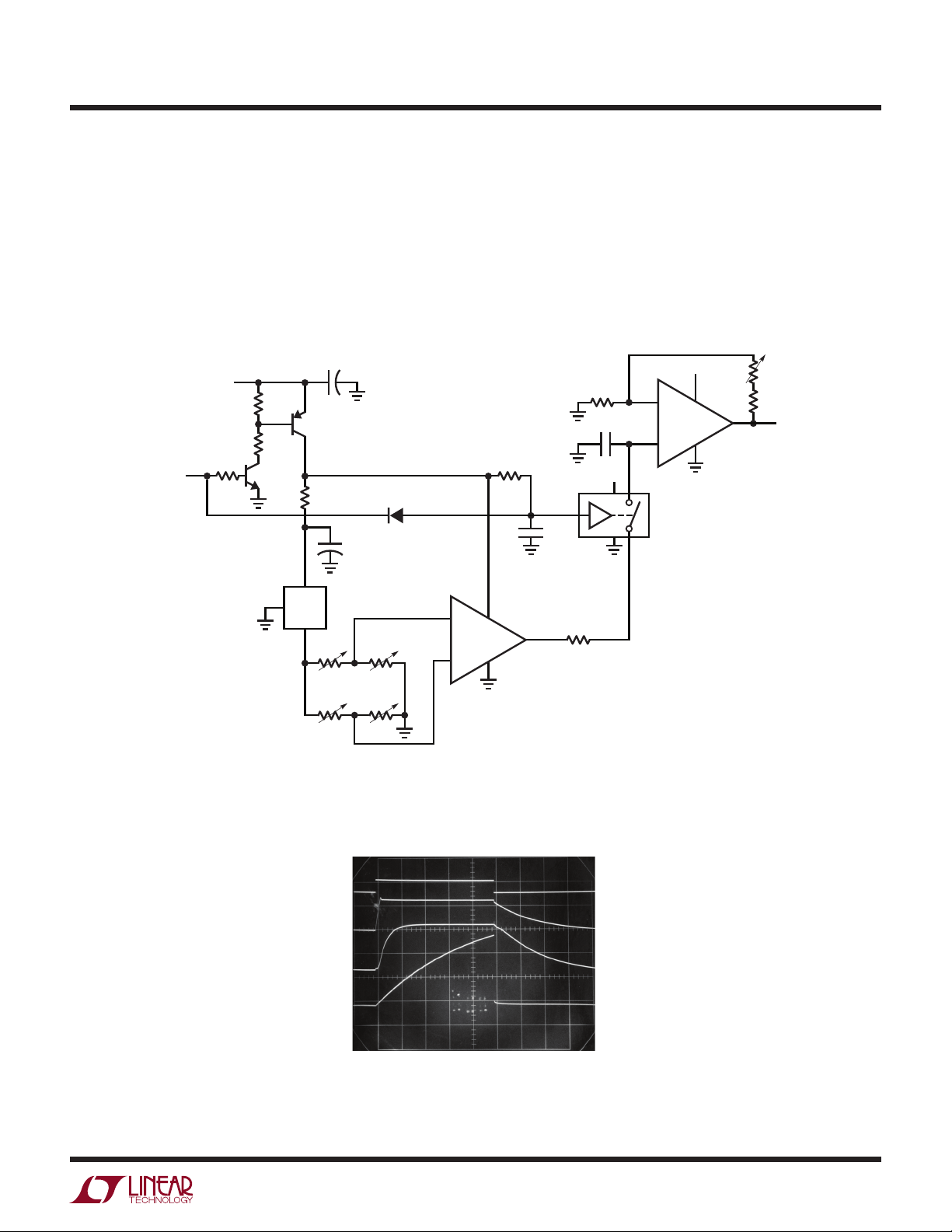
Strobed Power Bridge Drive
Figure 20, derived directly from Figure 10, is a simple way
to reduce power without sacrificing bridge signal output
level. The technique is applicable where continuous output is not a requirement. This circuit is designed to sit in
the quiescent state for long periods with relatively brief
on-times. A typical application would be remote weight
information in storage tanks where weekly readings are
sufficient. Quiescent current is about 150μA with on-state
current typically 50mA. Bridge power is conserved by
simply turning it off.
With Q1’s base unbiased, all circuitry is off except the
LT1054 plus-to-minus voltage converter, which draws a
150μA quiescent current. When Q1’s base is pulled low,
its collector supplies power to A1 and A2. A1’s output
goes high, turning on the LT1054. the LT1054’s output
(Pin 5) heads toward –5V and Q2 comes on, permitting
bridge current to flow. To balance its inputs, A1 servo
controls the LT1054 to force the bridge’s midpoint to 0V.
The bridge ends up with about 8V across it, requiring the
100mA capability LT1054 to sink about 24mA. The 0.02μF
capacitor stabilizes the loop. The A1-LT1054 loop’s negative
output sets the bridge’s common mode voltage to zero,
allowing A2 to take a simple single-ended measurement.
The “output trim” scales the circuit for 3mV/V type strain
bridge transducers, and the 100k-0.1μF combination
provides noise filtering.
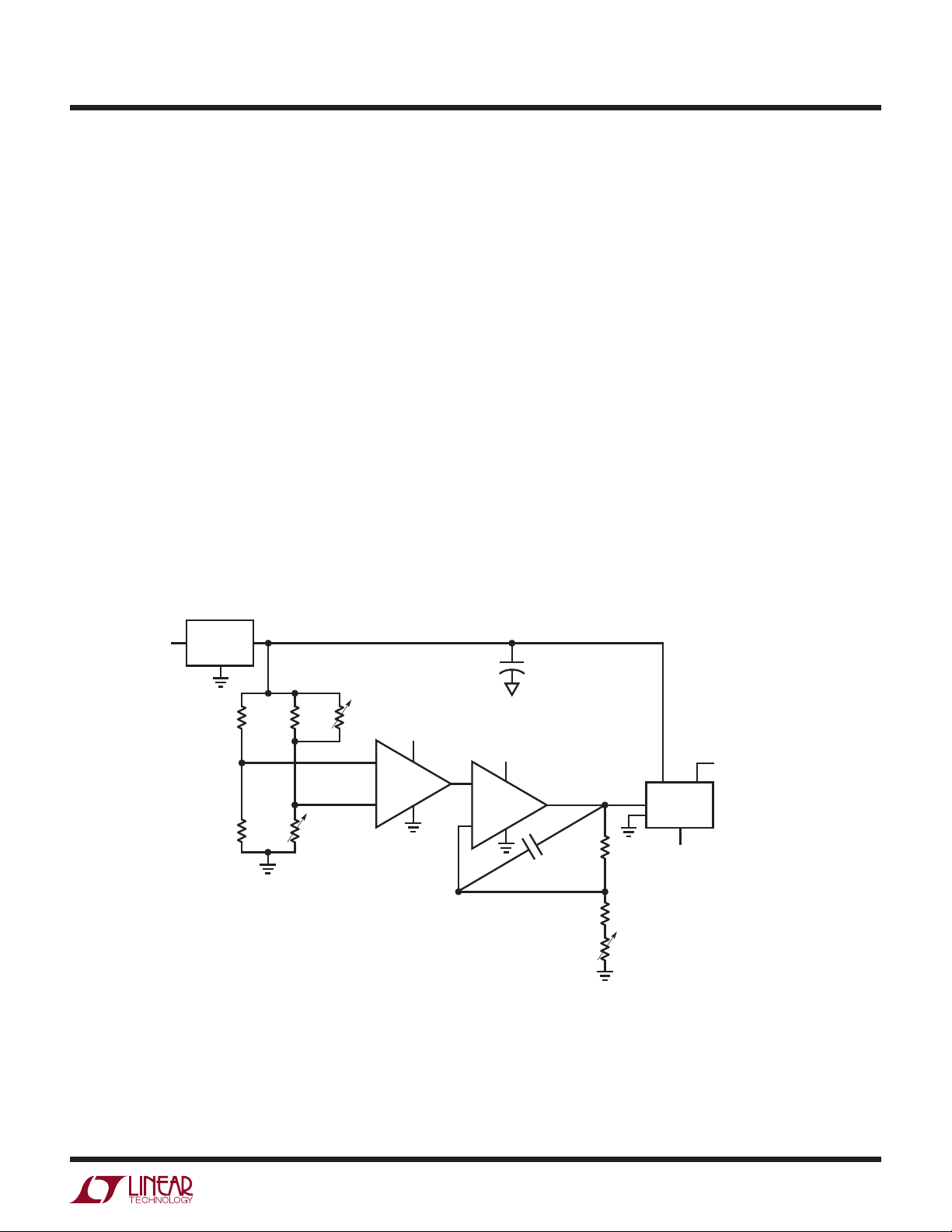
Sampled Output Bridge Signal Conditioner
Figure 21, an obvious extension of Figure 20, automates
the strobing into a clocked sequence. Circuit on-time is
restricted to 250μs, at a clock rate of about 2Hz. This
keeps average power consumption down to about 200μA.
Oscillator A1A produces a 250μs clock pulse every 500ms
(Trace A, Figure 22). A filtered version of this pulse is
fed to Q1, whose emitter (Trace B) provides slew limited
bridge drive. A1A’s output also triggers a delayed pulse
produced by the 74C221 one-shot output (Trace C). The
timing is arranged so the pulse occurs well after the A1BA2 bridge amplifier output (Trace D) settles. A monitoring
A/D converter, triggered by this pulse, can acquire A1B’s
output.
The slew limited bridge drive prevents the strain gauge
bridge from seeing a fast rise pulse, which could cause
long term transducer degradation. To calibrate this circuit
trim zero and gain for appropriate outputs.
10μF
+
SAMPLE
COMMAND
2
CAP
3
GND
4
CAP
* = 1% FILM RESISTOR
FB/SD
+
LT1054
–
V
10k
200k
1
OUT
10k
+
V
5V
+V
1/2 LT1078
0.02
5V
8
+
5
Q1
2N2907
A1
100μF
SOLID
TANTALUM
5V
40Ω
10μF
+
350Ω
3k
STRAIN
GAUGE
BRIDGE
3mV/V
TYPE
Q2
2N2222
100μF
+
100k
+
100k
–
50k
OUTPUT
TRIM
100k
49.9k*
0.1μF
Figure 20. Strobed Power Strain Gauge Bridge Signal Conditioner
10M*
–
A2
1/2 LT1078
+
OUTPUT
PULSE
0V TO 3V
AN43 F20
an43f
AN43-19
Page 20
Application Note 43
0.068
9V
9V
15k
2
3
100k
9V
–
A1A
1/2 LT1078
+
15k
3k
4
11
1N4148 22M
1
100k
100k
15 13
0.068
14
7
0.068
6
CONVERT COMMAND
74C221
TO A/D
4.7k 330Ω
1
5
0.01
10k
9
350Ω
STRAIN
GAGE
BRIDGE
301k*
9V
47μF
Q1
2N2219
+
–
* = 1% FILM RESISTOR
TO A/D RATIO
REFERENCE
A2
LT1101
A = 100
+
A1B
1/2 LT1078
–
Figure 21. Sampled Output Bridge Signal Conditioner Uses Pulsed Excitation to Save Power
TO A/D
2k*
200Ω
GAIN TRIM
750Ω*
AN43 F21
A = 10V/DIV
B = 5V/DIV
C = 10V/DIV
D = 2V/DIV
HORIZ = 50μs/DIV
AN43 F22
Figure 22. Figure 21’s Waveforms. Trace C’s Delayed Pulse Ensures
A/D Converter Sees Settled Output Waveform (Trace D)
AN43-20
an43f
Page 21
Continuous Output Sampled Bridge Signal Conditioner
Application Note 43
Figure 23 extends the sampling approach to include a
continuous output. This is accomplished by adding a
sample-hold stage at the circuit output. In this circuit, Q2
is off when the “sample command” is low. Under these
conditions only A2 and S1 receive power, and current drain
is inside 60μA. When the sample command is pulsed high,
Q2’s collector (Trace A, Figure 24) goes high, providing
47μF
SOLID TANTALUM
10k
10k
Q1
2N3904
LT1021
3mV/V
TYPE
+
Q2
2N3906
10Ω
+
IN
5V
OUT
350Ω STRAIN
GAUGE BRIDGE
1μF
1N4148
+
LT1101
A = 100
–
A1
10Hz
SAMPLE
COMMAND
6.5V TO 10V
V
10k
+
power to all other circuit elements. The 10Ω-1μF RC at the
LT1021 prevents the strain bridge from seeing a fast rise
pulse, which could cause long term transducer degradation. The LT1021-5 reference output (Trace B) drives the
strain bridge, and instrumentation amplifier A1 output
responds (Trace C). Simultaneously, S1’s switch control
input (Trace D) ramps toward Q2’s collector.
1M
OUTPUT
TRIM
1M
0V TO 5V
OUTPUT
200k
0.003
200Ω
1M
C1 1μF**
+V
6.5V TO 10V = +V
–
A2
LT1077
+
S1
1/4 CD4016
* = 1% METAL FILM RESISTOR
** = POLYSTYRENE
AN43 F23
Figure 23. Pulsed Excitation Bridge Signal Conditioner. Sample-Hold Stage Gives DC Output
A = 20V/DIV
B = 4V/DIV
C = 0.5V/DIV
D = 2V/DIV
HORIZ = 200μs/DIV
AN43 F24
Figure 24. Waveforms for Figure 23’s Sampled Strain Gauge
Signal Conditioner
an43f
AN43-21
Page 22

Application Note 43
At about one-half Q2’s collector voltage (in this case just
before mid-screen) S1 turns on, and A1’s output is stored
in C1. When the sample command drops low, Q2’s collector falls, the bridge and its associated circuitry shut down
and S1 goes off. C1’s stored value appears at gain scaled
A2’s output. The RC delay at S1’s control input ensures
glitch-free operation by preventing C1 from updating
until A1 has settled. During the 1ms sampling phase,
supply current approaches 20mA but a 10Hz sampling
rate cuts effective drain below 250μA. Slower sampling
rates will further reduce drain, but C1’s droop rate (about
1mV/100ms) sets an accuracy constraint. The 10Hz rate
provides adequate bandwidth for most transducers. For
3mV/V slope factor transducers the gain trim shown allows calibration. It should be rescaled for other types. This
circuit’s effective current drain is about 250μA, and A2’s
output is accurate enough for 12-bit systems.
It is important to remember that this circuit is a sampled
system. Although the output is continuous, information
is being collected at a 10Hz rate. As such, the Nyquist
limit applies, and must be kept in mind when interpreting
results.
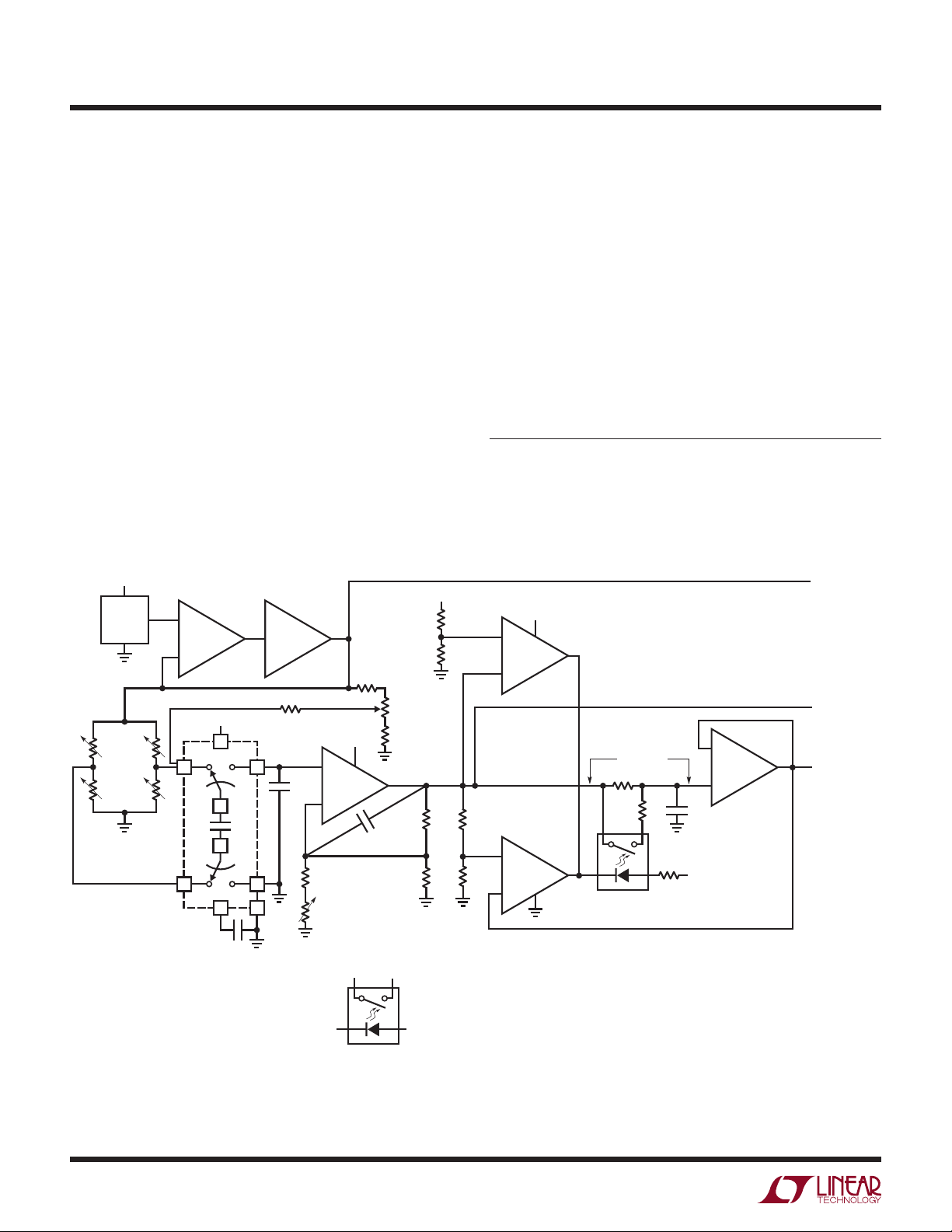
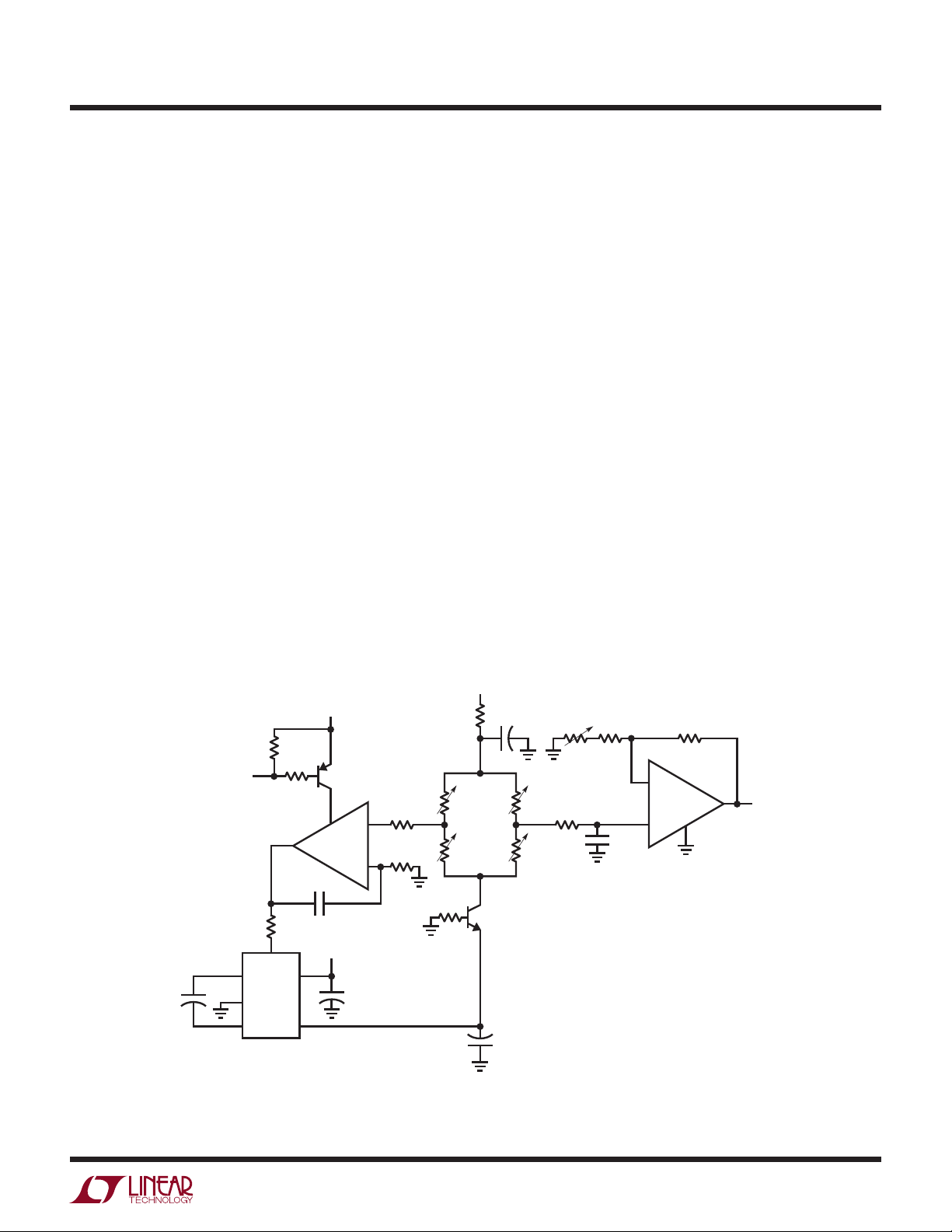
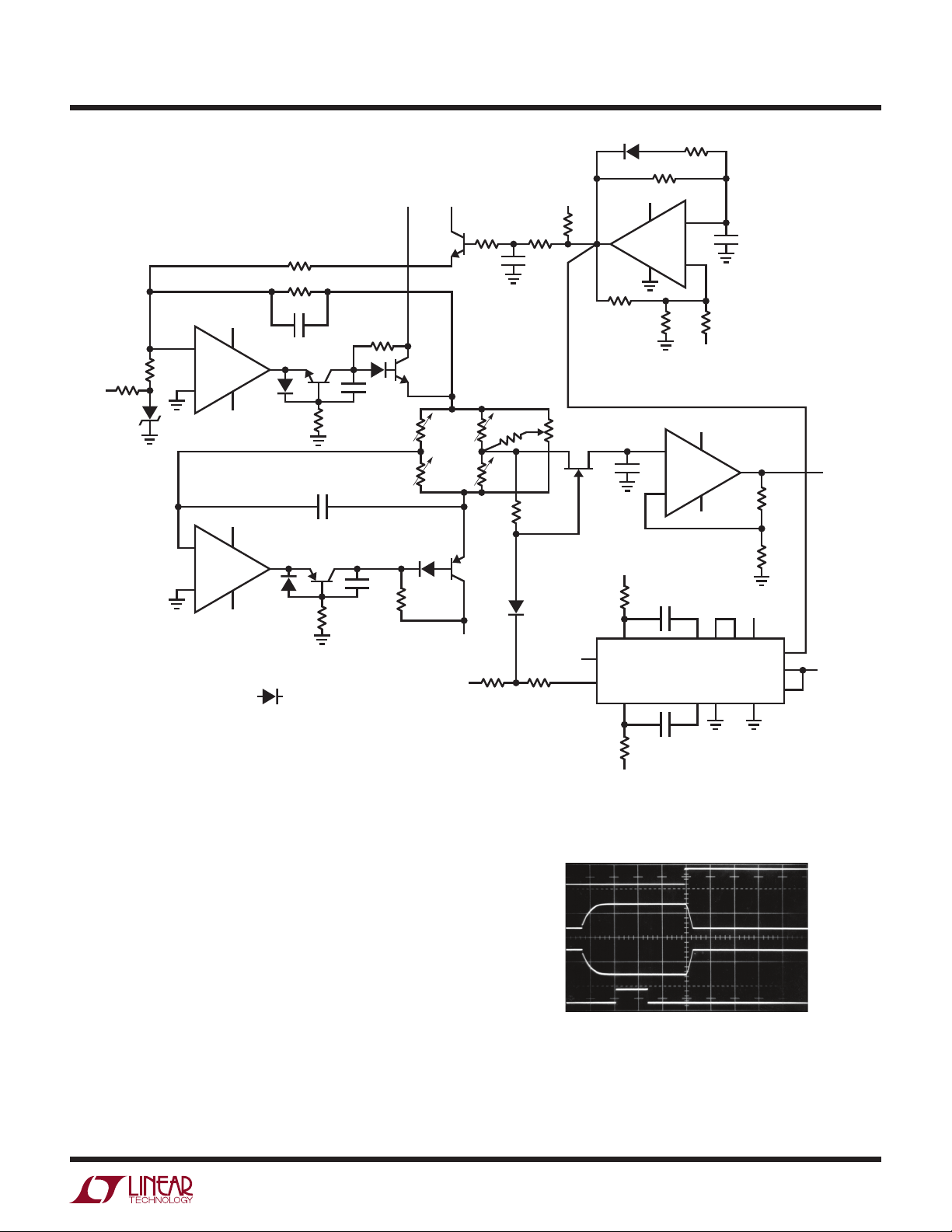
High Resolution Continuous Output Sampled Bridge
Signal Conditioner
Figure 25 is a special case of sampled bridge drive. It is
intended for applications requiring extremely high resolution outputs from a bridge transducer. This circuit puts
100V across a 10V, 350Ω strain gauge bridge for short
periods of time. The high pulsed voltage drive increases
bridge output proportionally, without forcing excessive
dissipation. In fact, although this circuit is not intended
for power reduction, average bridge power is far below
the normal 29mA obtained with 10V
Combining the 10× higher bridge gain (300mV full scale
versus the normal 30mV) with a chopper-stabilized amplifier in the sample-hold output stage is the key to the high
resolution obtainable with this circuit.
When oscillator A1A’s output is high Q6 is turned on and
A2’s negative input is pulled above ground. A2’s output
goes negative, turning on Q1. Q1’s collector goes low,
excitation.
DC
robbing Q3’s base drive and cutting it off. Simultaneously, A3 enforces it’s loop by biasing Q2 into conduction,
softly turning on Q4. Under these conditions the voltage
across the bridge is essentially zero. When A1A oscillates
low (Trace A, Figure 26) RC filter driven Q6 responds by
cutting off slowly. Now, A2’s negative input sees current
only through the 3.6k resistor. The input begins to head
negative, causing A2’s output to rise. Q1 comes out of
saturation, and Q3’s emitter (Trace B) rises. Initially this
action is rapid (fast rise slewing is just visible at the start
of Q3’s ascent), but feedback to A2’s negative input closes
a control loop, with the 1000pF capacitor restricting rise
time. The 72k resistor sets A2’s gain at 20 with respect
to the LT1004 2.5V reference, and Q3’s emitter servo
controls to 50V.
Simultaneously, A3 responds to the bridges biasing by
moving its output negatively. Q2 tends towards cut-off,
increasing Q4’s conduction. A3 biases its loop to maintain
the bridge midpoint at zero. To do this, it must produce a
complimentary output to A2’s loop, which Trace C shows
to be the case. Note that A3’s loop roll-off is considerably
faster than A2’s, ensuring that it will faithfully track A2’s
loop action. Similarly, A3’s loop is slaved to A2’s loop
output, and produces no other outputs.
Under these conditions the bridge sees 100V drive across
it for the 1ms duration of the clock pulse.
A1A’s clock output also triggers the 74C221 one-shot.
The one-shot delivers a delayed pulse (Trace D) to Q5. Q5
comes on, charging the 1μF capacitor to the bridges output
voltage. With A3 forcing the bridges left side midpoint to
zero, Q5, the 1μF capacitor and A4 see a single-ended, low
voltage signal. High transient common mode voltages are
avoided by the control loops complimentary controlled rise
times. A4 takes gain and provides the circuit output. The
74C221’s pulse width ends during the bridge’s on-time,
preserving sampled data integrity. When the A1A oscillator
goes high the control loops remove bridge drive, returning
the circuit to quiescence. A4’s output is maintained at DC
by the 1μF capacitor. A1A’s 1Hz clock rate is adequate to
prevent deleterious droop of the 1μF capacitor, but slow
enough to limit bridge power dissipation. The controlled
AN43-22
an43f
Page 23
Application Note 43
4.7k
2.7M
–15V
2.7k
LT1004
2.5V
3.6k
–
LT1012
+
–
LT1007
+
15V
A2
–15V
15V
A3
–15V
* = 1% FILM RESISTOR
2k
72k
1000pF
MPSA42
MPSA92
= 1N4148
Q1
100pF
Q2
4.7k
4.7k
55V 15V 15V
4.7k
Q6
2N3904
10k
Q3
MJE344
68pF
350Ω
BRIDGE
Q4
–15V
MJE350
–55V
12k 10k
68pF
10k
1M
0.002
10M
4.7k
50k
ZERO
15V
1k
Q5
2N4391
C2
Q2
2.7M
15V
R1
R2
15V
A1A
1/2 LT1018
1μF
10k
0.05
–
+
2.7M
+
A4
LTC1150
–
74C221
15V
15V
–15V
C1
C2
2.7M
Q1 B1
A2
0.33
15V
33k*
100Ω*
A1
B1
C1
OUTPUT
15V
AN43 F25
0.05
3k
15V
Figure 25. High Resolution Pulsed Excitation Bridge Signal Conditioner. Complementary 50V Drive Increases Bridge Output Signal
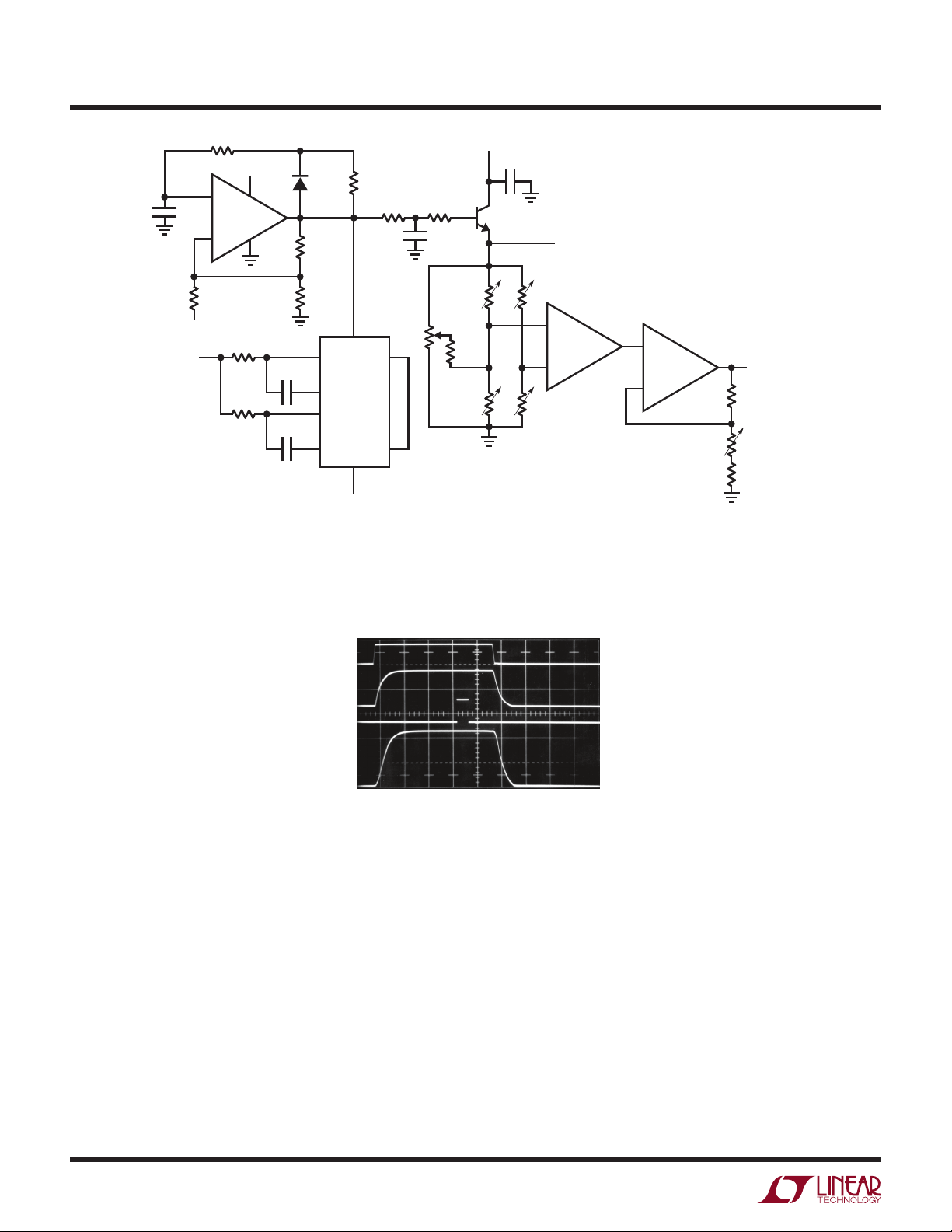
rise and fall times across the bridge prevent possible
A = 20V/DIV
long-term transducer degradation by eliminating high
ΔV/ΔT induced effects.
B = 50V/DIV
When using this circuit it is important to remember that it
is a sampled system. Although the output is continuous,
information is being collected at a 1Hz rate. As such, the
Nyquist limit applies, and must be kept in mind when
C = 50V/DIV
D = 20V/DIV
HORIZ = 200μs/DIV
AN43 F26
interpreting results.
Figure 26. Figure 25’s Waveforms. Drive Shaping Results in
Controlled, Complementary Bridge Drive Waveforms. Bridge
Power is Low Despite 100V Excitation
an43f
AN43-23
Page 24
Application Note 43
AC Driven Bridge/Synchronous Demodulator
Figure 27, an extension of pulse excited bridges, uses
synchronous demodulation to obtain very high noise
rejection capability. An AC carrier excites the bridge and
synchronizes the gain stage demodulator. In this application, the signal source is a thermistor bridge which
detects extremely small temperature shifts in a biochemical
microcalorimetry reaction chamber.
The 500Hz carrier is applied at T1’s input (Trace A, Figure 28). T1’s floating output drives the thermistor bridge,
which presents a single-ended output to A1. A1 operates
at an AC gain of 1000. A 60Hz broadband noise source
is also deliberately injected into A1’s input (Trace B). The
carrier’s zero crossings are detected by C1. C1’s output
clocks the LTC1043 (Trace C). A1’s output (Trace D) shows
the desired 500Hz signal buried within the 60Hz noise
source. The LTC1043’s zero-cross-synchronized switching
at A2’s positive input (Trace E) causes A2’s gain to alternate
between plus and minus one. As a result, A1’s output is
synchronously demodulated by A2. A2’s output (Trace F)
consists of demodulated carrier signal and non-coherent
components. The desired carrier amplitude and polarity
information is discernible in A2’s output and is extracted
by filter-averaging at A3. To trim this circuit, adjust the
phase potentiometer so that C1 switches when the carrier
crosses through zero.
A = 2V/DIV
B = 2V/DIV
C = 50V/DIV
D = 5V/DIV
E = 5V/DIV
F = 5V/DIV
HORIZ = 5ms/DIV
Figure 28. Details of Lock-In Amplifier Operation. Narrowband
Synchronous Detection Permits Extraction of Coherent Signals
Over 120dB Down
AN43 F28
500Hz
SINE DRIVE
THERMISTOR BRIDGE
IS THE SIGNAL SOURCE
T1
1
4
3
2
6.19k
6.19k
6.19kR
T
PHASE TRIM
50k
10k
C1
0.002
ZERO CROSSING DETECTOR
TEST
POINT
A
SYNCHRONOUS
DEMODULATOR
–
2
1/2 LT1057
3
+
10k*
5V
A2
1M
–5V
T1 = TF5SX17ZZ, TOROTEL
= YSI THERMISTOR 44006
R
T
≈ 6.19k AT 37.5°C
* = MATCH 0.05%
6.19k = VISHAY S-102
OPERATE LTC1043 WITH
±5V SUPPLIES
1μF
–
2
1/2 LT1057
3
+
5V
A3
–5V
t%$
V
OUT
BRIDGE SIGNAL
10k*
5V
3
+
A1
LT1007
2
–
6
–5V
+
5V
2
+
LT1011
3
–
1
5V
8
7
4
–5V
1/4 LTC1043
13
12
100k
14 16
100Ω
47μF0.01
1k
AN43 F27
AN43-24
Figure 27. “Lock-In” Bridge Amplifier. Synchronous Detection Achieves Extremely Narrow Band Gain,
Providing Very High Noise Rejection
an43f
Page 25
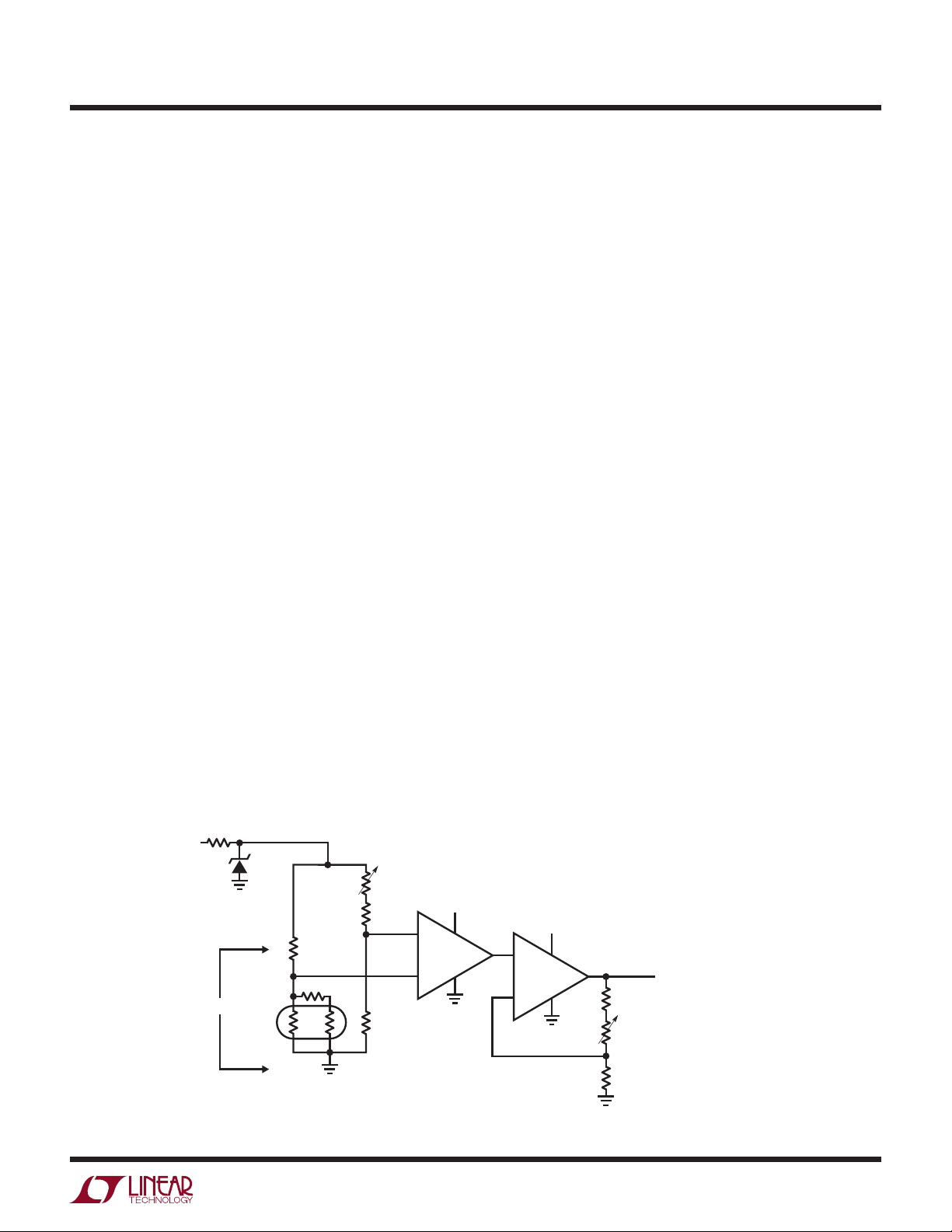
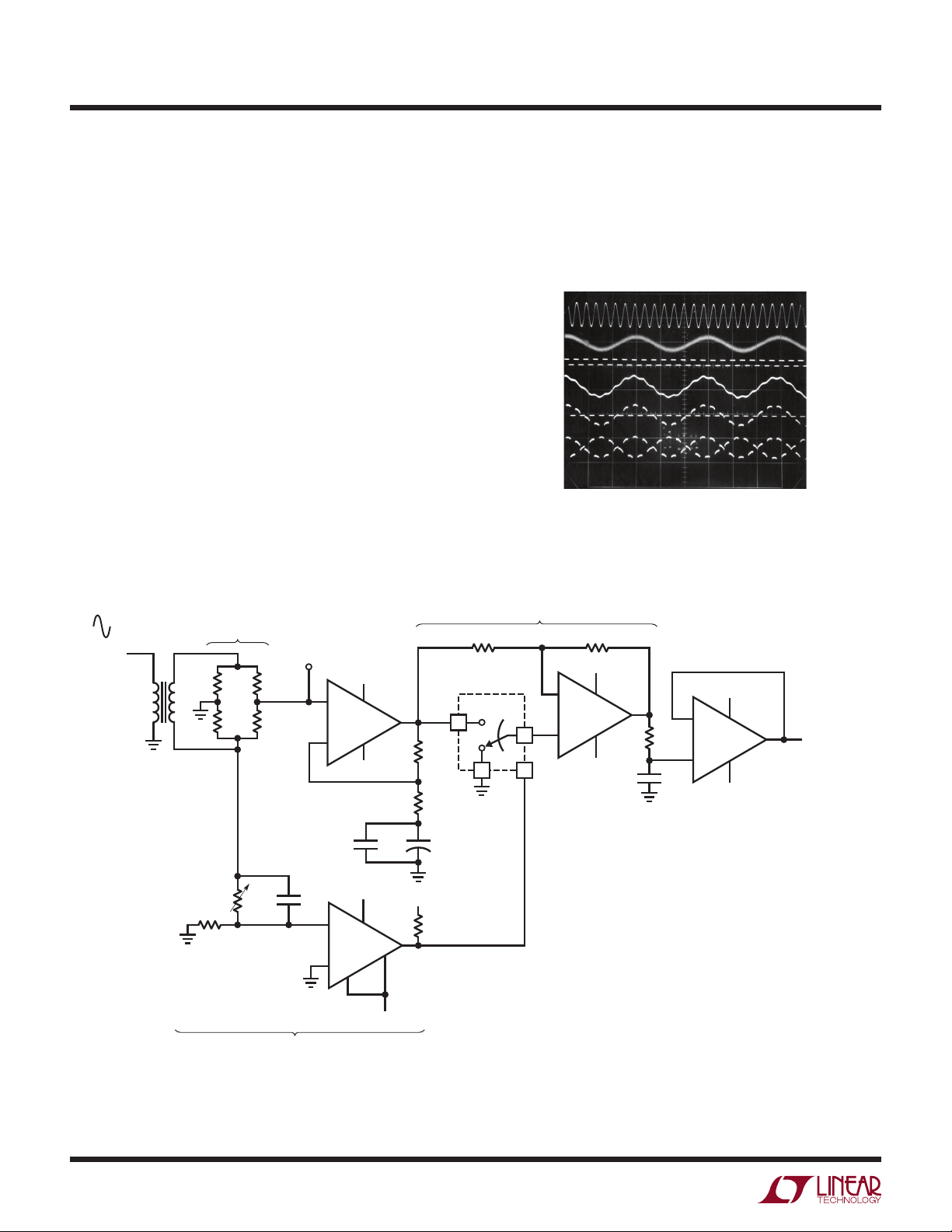
AC Driven Bridge for Level Transduction
Application Note 43
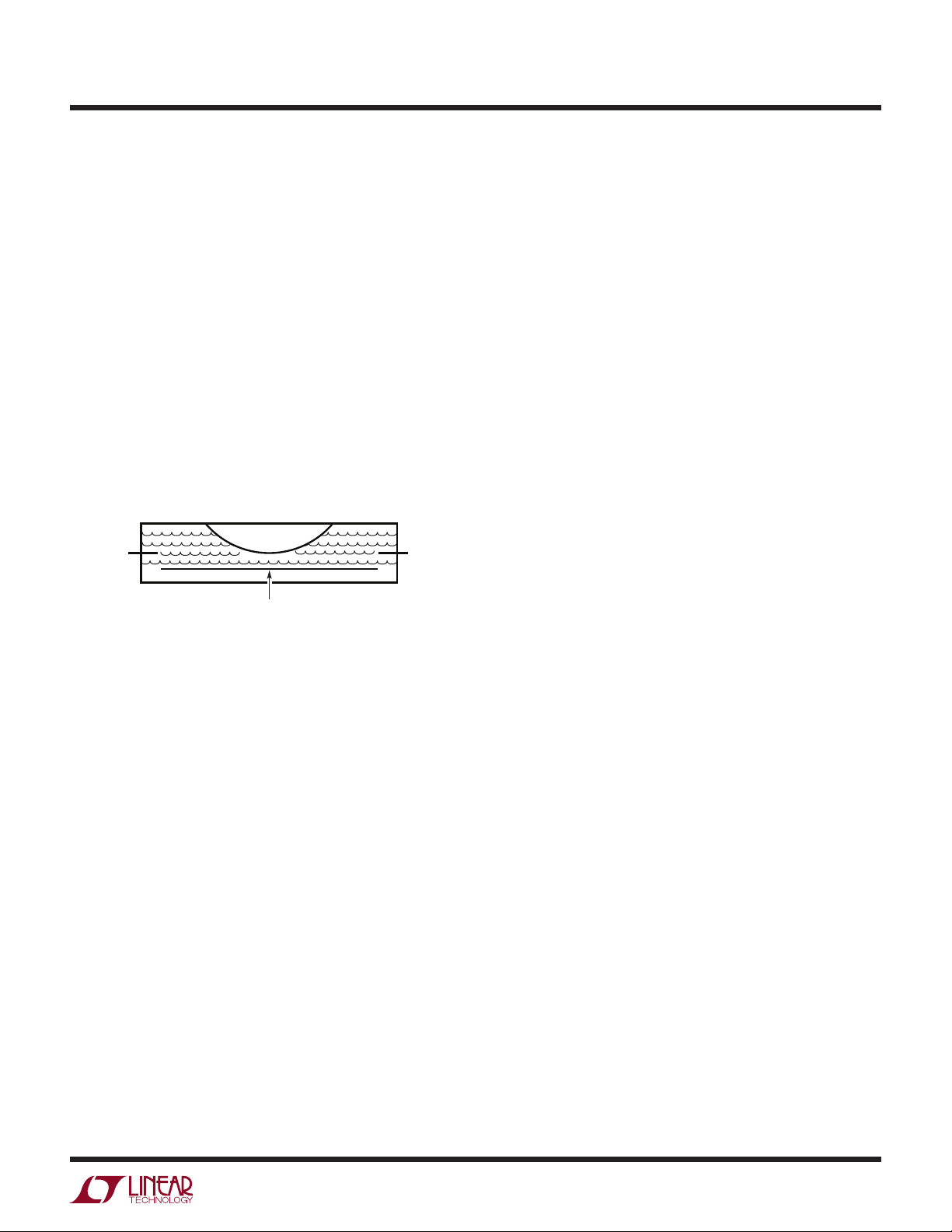
Level transducers which measure angle from ideal level
are employed in road construction, machine tools, inertial
navigation systems and other applications requiring a
gravity reference. One of the most elegantly simple level
transducers is a small tube nearly filled with a partially
conductive liquid. Figure 29a shows such a device. If the
tube is level with respect to gravity, the bubble resides in
the tube’s center and the electrode resistances to common are identical. As the tube shifts away from level,
the resistances increase and decrease proportionally. By
controlling the tube’s shape at manufacture it is possible
to obtain a linear output signal when the transducer is
incorporated in a bridge circuit.
PARTIALLY
CONDUCTIVE
LIQUID IN
SEALED
GLASS TUBE
BUBBLE
ELECTRODEELECTRODE
AN43 F29a
COMMON ELECTRODE
Figure 29a. Bubble-Based Level Transducer
Transducers of this type must be excited with an AC waveform to avoid damage to the partially conductive liquid
inside the tube. Signal conditioning involves generating
this excitation as well as extracting angle information and
polarity determination (e.g., which side of level the tube is
on). Figure 29b shows a circuit which does this, directly
producing a calibrated frequency output corresponding to
level. A sign bit, also supplied at the output, gives polarity
information.
The level transducer is configured with a pair of 2kΩ resistors to form a bridge. The required AC bridge excitation is
developed at C1A, which is configured as a multivibrator.
C1A biases Q1, which switches the LT1009’s 2.5V potential
through the 100μF capacitor to provide the AC bridge drive.
The bridge differential output AC signal is converted to a
current by A1, operating as a Howland current pump. This
current, whose polarity reverses as bridge drive polarity
switches, is rectified by the diode bridge. Thus, the 0.03μF
capacitor receives unipolar charge. Instrumentation amplifier A2 measures the voltage across the capacitor and
presents its single-ended output to C1B. When the voltage
across the 0.03μF capacitor becomes high enough, C1B’s
output goes high, turning on the LTC201A switch. This
discharges the capacitor. When C1B’s AC positive feedback
ceases, C1B’s output goes low and the switch goes off. The
0.03μF unit again receives constant current charging and
the entire cycle repeats. The frequency of this oscillation
is determined by the magnitude of the constant current
delivered to the bridge-capacitor configuration. This current’s magnitude is set by the transducer bridge’s offset,
which is level related.
Figure 30 shows circuit waveforms. Trace A is the AC
bridge drive, while Trace B is A1’s output. Observe that
when the bridge drive changes polarity, A1’s output flips
sign rapidly to maintain a constant current into the bridgecapacitor configuration. A2’s output (Trace C) is a unipolar,
ground-referred ramp. Trace D is C1B’s output pulse and
the circuit’s output. The diodes at C1B’s positive input
provide temperature compensation for the sensor’s positive tempco, allowing C1B’s trip voltage to ratiometrically
track bridge output over temperature.
A3, operating open loop, determines polarity by comparing the rectified and filtered bridge output signals with
respect to ground.
To calibrate this circuit, place the level transducer at a
known 40 arc-minute angle and adjust the 5kΩ trimmer
at C1B for a 400Hz output. Circuit accuracy is limited by
the transducer to about 2.5%.
an43f
AN43-25
Page 26

Application Note 43
5V
–
1/2 LT1057
+
1N4148
w4
1/4
LTC201A
5V
C1A
1/2 LT1018
–5V
A1
–
+
–
+
10k*
10k*
A2
LT1102
A = 10
0.01μF
220pF
CALIBRATE
330Ω
1N4148
0.1
10M
0.1
1N4148
3.01k
5k
5V
1N4148
LT1009
2.5V
10M
220k
1.3k
–
A3
1/2 LT1057
+
–
C1B
1/2 LT1018
+
47pF
SIGN BIT
+ OR – FOR
EITHER SIDE
OF LEVEL
5V
1k
FREQUENCY OUT
0 TO 40 ARC
MINUTES =
0Hz TO 400Hz
2M
+
10μF
Q1
2N3906
10k
10k
10k
200k
+
100μF
2k*2k*
LEVEL
TRANSDUCER
499k*
499k*
200k
I
K
0.03
Figure 29b. Level Transducer Digitizer Uses AC Bridge Technique
A = 5V/DIV
B = 1V/DIV
C = 2V/DIV
D = 20V/DIV
HORIZ = 20ms/DIV
AN43 F30
Figure 30. Level Transducer Bridge Circuit’s Waveforms
* = 1% RESISTOR
LEVEL TRANSDUCER = FREDERICKS #7630
AN43 F29b
Time Domain Bridge
Figure 31 is another AC-based bridge, but works in the
time domain. This circuit is particularly applicable to
capacitance measurement. Operation is straightforward.
With S1 closed the comparators output is high. When S1
opens, capacitor C
charges. When CX’s potential crosses
X
the voltage established by the bridge’s left side resistors
the comparator trips low. The elapsed time between the
switch opening and the comparator going low is proportionate to C
’s value. This circuit is insensitive to supply and
X
an43f
AN43-26
Page 27

Application Note 43
15V
10k*
10k*
–
LT1011
15V
1k
OUTPUT
+
20k*
C
X
LTC201A
INPUT
AN43 F31
* = 1% FILM RESISTOR
Figure 31. Time Domain Bridge
repetition rate variations and can provide good accuracy if
time constants are kept much larger than comparator and
switch delays. For example, the LT1011’s delay is about
200ns and the LTC201A contributes 450ns. To ensure 1%
accuracy the bridges right side time constant should not
drop below 65μs. Extremely low values of capacitance
may be influenced by switch charge injection. In such
cases switching should be implemented by alternating
the bridge drive between ground and +15.
Bridge Oscillator—Square Wave Output
Only an inattentive outlook could resist folding Figure 31’s
bridge back upon itself to make an oscillator. Figure 32
does this, forming a bridge oscillator. This circuit will also
be recognized as the classic op amp multivibrator. In this
version the 10k to 20k bridge leg provides switching point
hysteresis with C
When C
reaches the switching point the amplifier’s output
X
charged via the remaining 10k resistor.
X
changes state, abruptly reversing the sign of its positive
input voltage. C
’s charging direction also reverses, and
X
oscillations continue. At frequencies that are low compared
to amplifier delays output frequency is almost entirely
dependent on the bridge components. Amplifier input
errors tend to ratiometrically cancel, and supply shifts are
similarly rejected. The duty cycle is influenced by output
saturation and supply asymmetrys.
Quartz Stabilized Bridge Oscillator
Figure 33, generically similar to Figure 32, replaces one
of the bridge arms with a resonant element. With the
crystal removed the circuit is a familiar noninverting gain
of 2 with a grounded input. Inserting the crystal closes a
positive feedback path at the crystal’s resonant frequency.
The amplifier output (Trace A, Figure 34) swings in an
attempt to maintain input balance. Excessive circuit gain
prevents linear operation, and oscillations commence as
the amplifier repeatedly overshoots in its attempts to null
the bridge. The crystal’s high Q is evident in the filtered
waveform (Trace B) at the amplifiers positive input.
CRYSTAL
20kHz
NT CUT
100k
Figure 33. Bridge-Based Crystal Oscillator
A = 10V/DIV
100Ω
100Ω
–
LT1056
+
AN43 F33
10k*
10k*
15V
–
LT1056
C
X
+
20k*
–15V
* = 1% FILM RESISTOR
AN43 F32
Figure 32. “Bridge Oscillator” (Good Old Op Amp
Multivibrator with a Fancy Name)
B = 5V/DIV
HORIZ = 20μs/DIV
AN43 F34
Figure 34. Bridge-Based Crystal Oscillator’s Waveforms.
Excessive Gain Causes Output Saturation Limiting
AN43-27
an43f
Page 28

Application Note 43
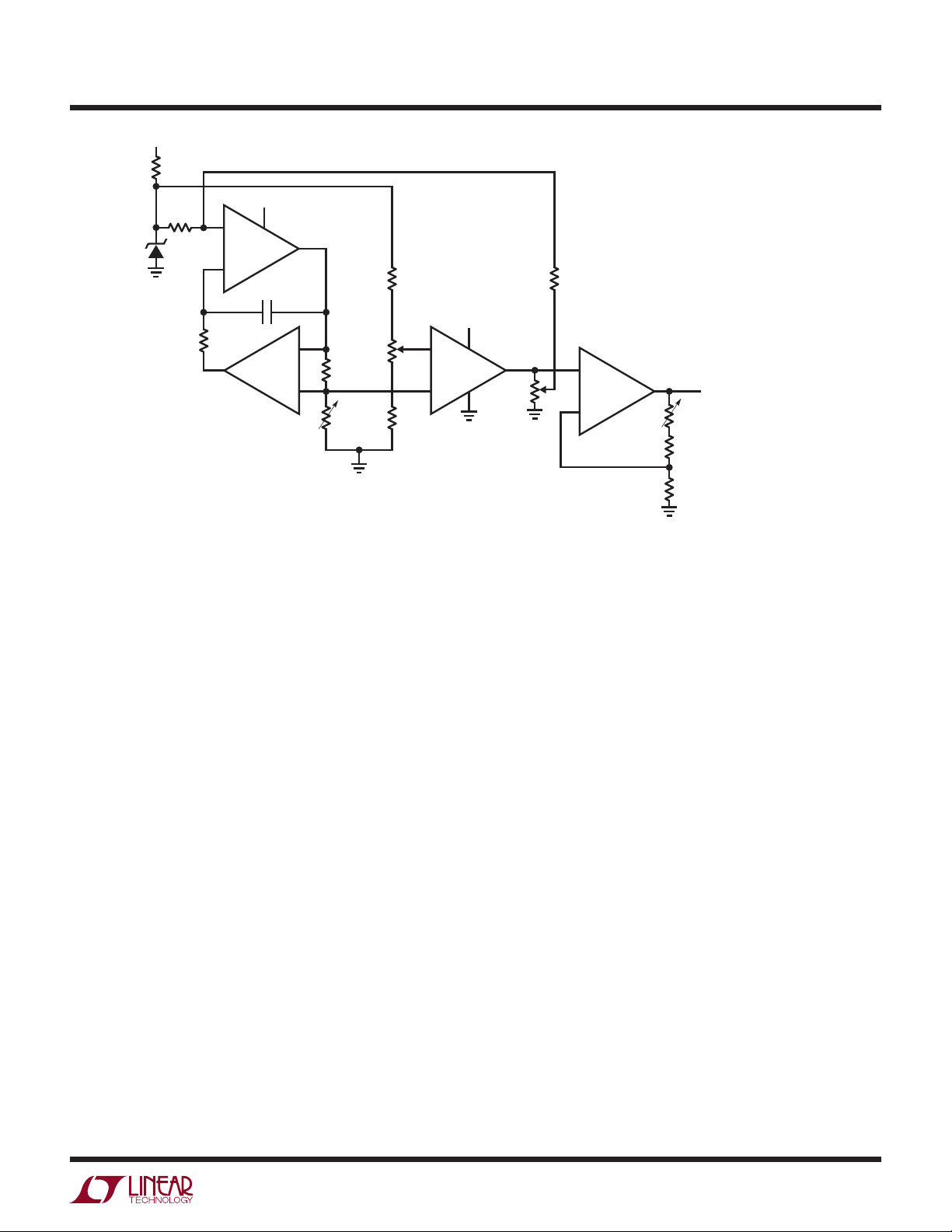
Sine Wave Output Quartz Stabilized Bridge Oscillator
Figure 35 takes the previous circuit into the linear region to
produce a sine wave output. It does this by continuously
controlling the gain to maintain linear operation. This
arrangement uses a classic technique first described by
Meacham in 1938 (see References).
In any oscillator it is necessary to control the gain as well
as the phase shift at the frequency of interest. If gain is too
low, oscillation will not occur. Conversely, too much gain
produces saturation limiting, as in Figure 33. Here, gain
control comes from the positive temperature coefficient
of the lamp. When power is applied, the lamp is at a low
resistance value, gain is high and oscillation amplitude
builds. As amplitude builds, the lamp current increases,
heating occurs and its resistance goes up. This causes a
reduction in amplifier gain and the circuit finds a stable
operating point. The 15pF capacitor suppresses spurious
oscillation.
Operating waveforms appear in Figure 36. The amplifiers
output (Trace A, Figure 36) is a sine wave, with about 1.5%
distortion (Trace B). The relatively high distortion content
is almost entirely due to the common mode swing seen
by the amplifier. Op amp common mode rejection suffers
at high frequency, producing output distortion. Figure 37
eliminates the common mode swing by using a second
3
amplifier to force the bridge’s midpoint to virtual ground.
It does this by measuring the midpoint value, comparing
it to ground and controlling the formerly grounded end
of the bridge to maintain its inputs at zero. Because the
bridge drive is complementary the oscillator amplifier
now sees no common mode swing, dramatically reducing
distortion. Figure 38 shows less than 0.005% distortion
(Trace B) in the output (Trace A) waveform.
Note 3: Sharp-eyed readers will recognize this as an AC version of the DC
common mode suppression technique introduced back in Figure 6.
CRYSTAL
20kHz
NT CUT
100Ω
–
AN43 F35
RMS
20kHz
15pF
100k
#327
LAMP
LT1056
+
OSCILLATOR
OUT
1V
Figure 35. Figure 33 with Lamp Added for Gain Stabilization
0.005
COMMON MODE
SUPRESSION
CRYSTAL
20kHz
NT CUT
100Ω
–
OUT
1V
RMS
20kHz
15pF
100k
#327
LAMP
1/2 LT1057
+
OSCILLATOR
AN43 F37
–
1/2 LT1057
+
A = 2V/DIV
B = 0.1V/DIV
(1.5% DISTORTION)
HORIZ = 20μs/DIV
Figure 36. Lamp-Based Amplitude Stabilization
Produces Sine Wave Output
A = 2V/DIV
B = 0.2V/DIV
(0.005% DISTORTION)
HORIZ = 20μs/DIV
AN43 F36
AN43 F38
Figure 37. Common Mode Suppression for Quartz Oscillator
Lowers Distortion
AN43-28
Figure 38. Distortion Measurements for Figure 37.
Common Mode Suppression Permits 0.005% Distortion
an43f
Page 29

Wien Bridge-Based Oscillators
Application Note 43
Crystals are not the only resonant elements that can be
stabilized in a gain-controlled bridge. Figure 39 is a Wien
bridge (see References) based oscillator. The configuration
shown was originally developed for telephony applications.
The circuit is a modern adaptation of one described by a
4
Stanford University student, William R. Hewlett,
in his
1939 masters thesis (see Appendix C, “The Wien Bridge
and Mr. Hewlett”).
430Ω
–
2
LT1037
3
#327
LAMP
0.1μF
Figure 39. Wien Bridge-Based Sine Wave Oscillator. Simple, Modern Version of an Old Circuit Has 0.0025% Distortion
+
1.6k
The Wien network provides phase shift governed by the
equation listed, and the lamp regulates amplitude in accordance with Figure 35’s description. Figure 40 is a variable
frequency version of the basic circuit. Output frequency
range spans 20Hz to 20kHz in three decade ranges, with
0.25dB amplitude flatness.
Note 4: History records that Hewlett and his friend David Packard made
a number of these type oscillators. Then they built some other kinds of
instruments.
6
OUTPUT
0.1μF
1.6k
AN43 F39
1
f =
2πRC
OUTPUT FREQUENCY = 1.000kHz
FOR VALUES GIVEN
LOW FREQ (<50Hz)
LOW DISTORTION MODE
NORMAL
MODE
20Hz TO 200Hz
0.82
953*
10k
L2 TO L5 #1891
L1 #327
200Hz TO 2kHz 2kHz TO 20kHz
0.082 0.0082
100Ω
430Ω
–
LT1037
+
OUTPUT
0.82
953*
10k
AN43 F40
0.082 0.0082
* = 1% FILM RESISTOR
10k DUAL POTENTIOMETER—
MATCH TRACKING 0.1%
MATCH ALL LIKE CAPACITOR
VALUES 0.1%
Figure 40. Multirange Wien Bridge-Based Oscillator. Multiple Lamps Provide Lowered Distortion at Low Frequencies
an43f
AN43-29
Page 30

Application Note 43
The smooth, limiting nature of the lamp’s operation, in
combination with its simplicity, gives good results. Trace A,
Figure 41, shows circuit output at 10kHz. Harmonic distortion, shown in Trace B, is below 0.003%. The trace shows
that most of the distortion is due to second harmonic
content and some crossover disturbance is noticeable.
The low resistance values in the Wien network and the
3.8nV√Hz noise specification of the LT1037 eliminate
amplifier noise as an error term.
A = 10V/DIV
B = 0.01V/DIV
(0.003% DISTORTION)
HORIZ = 20μs/DIV
Figure 41. Figure 40’s Distortion Characteristic at 10kHz
AN43 F41
At low frequencies, the thermal time constant of the small
normal mode lamp begins to introduce distortion levels
above 0.01%. This is due to “hunting” as the oscillator’s
frequency approaches the lamp thermal time constant.
This effect can be eliminated, at the expense of reduced
output amplitude and longer amplitude settling time, by
switching to the low frequency, low distortion mode. The
four large lamps give a longer thermal time constant and
distortion is reduced. Figure 42 plots distortion versus
frequency for the circuit.
Figure 43’s version replaces the lamp with an electronic
amplitude stabilization loop. The LT1055 compares the
oscillators positive output peaks with a DC reference.
The diode in series with the LT1004 reference provides
temperature compensation for the rectifier diode. The op
amp biases Q1, controlling its channel resistance. This
influences loop gain, which is reflected in oscillator output
amplitude. Loop closure around the LT1055 occurs, stabilizing oscillator amplitude. The 15μF capacitor stabilizes
the loop, with the 22k resistor settling its gain.
0.050
0.045
0.040
0.035
0.030
0.025
0.020
LOW FREQUENCY
0.015
LOW DISTORTION
PERCENT DISTORTION
0.010
0.005
MODE
0
0
20
NORMAL MODE
200
FREQUENCY (Hz)
C1
0.047
200Ω
2k
R2
200
R1
2k
+
LT1115
–
5.6k2.4k
10pF
D
560Ω
2k
20k
AN43 F42
Q1
2N4338
S
22k
15μF
LT1055
+
C2
0.047
–
+
1V
OUTPUT
RMS
1.5kHz TO 15kHz
1
f =
2πRC
WHERE R1C1 = R2C2
4.7k
15V
LT1004-1.2V
MOUNT 1N4148s
IN CLOSE
PROXIMITY
10k
AN43 F43
Figure 43. Replacing the Lamp with an Electronic EquivalentFigure 42. Figure 40’s Distortion vs Frequency
AN43-30
an43f
Page 31

Application Note 43
Distortion performance for this circuit is quite disappointing. Figure 44 shows 0.15% 2f distortion (Trace B) in the
output (Trace A), a huge increase over the lamp-based
5
approach.
This distortion does not correlate with the
rectifier peaking residue present at Q1’s gate (Trace C).
Where is the villain in this scheme?
A = 2V/DIV
B = 0.01V/DIV
(0.15% DISTORTION)
C = 1V/DIV
(AC-COUPLED)
HORIZ = 200μs/DIV
AN43 F44
Figure 44. Figure 43 Produces Excessive Distortion Due to Q1’s
Channel Resistance Modulation
The culprit turns out to be Q1. In a FET, gate voltage theoretically sets channel resistance. In fact, channel voltage
also slightly modulates channel resistance. In this circuit
Q1’s channel sees large swings at the fundamental. This
swing combines with the channel voltage-resistance
modulation effect, producing distortion.
The cure for this difficulty is local feedback around Q1.
Properly scaled, this feedback nicely cancels out the
parasitic. Figure 45 shows the circuit redrawn with the
inclusion of Q1’s local loop. The 20k trimmer allows adjustment to optimize distortion performance. Figure 46
shows results. Distortion (Trace B) drops to 0.0018% and
is composed of 2f, some gain loop rectification artifacts
and noise. For reference the circuit’s output (Trace A) and
the LT1055 output (Trace C) are shown.
Figure 47 eliminates the trim, provides increased voltage
and current output, and slightly reduces distortion. Q1
is replaced with an optically driven CdS photocell. This
device has no parasitic resistance modulation effects. The
LT1055 has been replaced with a ground sensing op amp
Note 5: What else should be expected when trying to replace a single light
bulb with a bunch of electronic components? I can hear Figure 39’s #327
lamp laughing.
A = 2V/DIV
B = 0.01V/DIV
(0.0018% DISTORTION)
C = 1V/DIV
(AC-COUPLED)
HORIZ = 200μs/DIV
Figure 46. Figure 45’s 0.0018% Distortion Characteristic
AN43 F46
560Ω
2.4k
Q1
2N4338
2k
0.047
S
D
C1
200Ω
R2
200
R1
2k
+
LT1115
–
5.6k
10pF
10k
100k
TRIM FOR
20k
LOWEST
DISTORTION
22k
15pF
LT1055
+
C2
0.047
–
+
1V
OUTPUT
RMS
1.5kHz TO 15kHz
1
f =
2πRC
WHERE R1C1 = R2C2
4.7k
15V
LT1004-1.2V
MOUNT 1N4148s
IN CLOSE
PROXIMITY
10k
AN43 F45
Figure 45. Local Feedback Around Q1 Cures Channel Resistance Modulation, Reducing Distortion to 0.0018%
an43f
AN43-31
Page 32
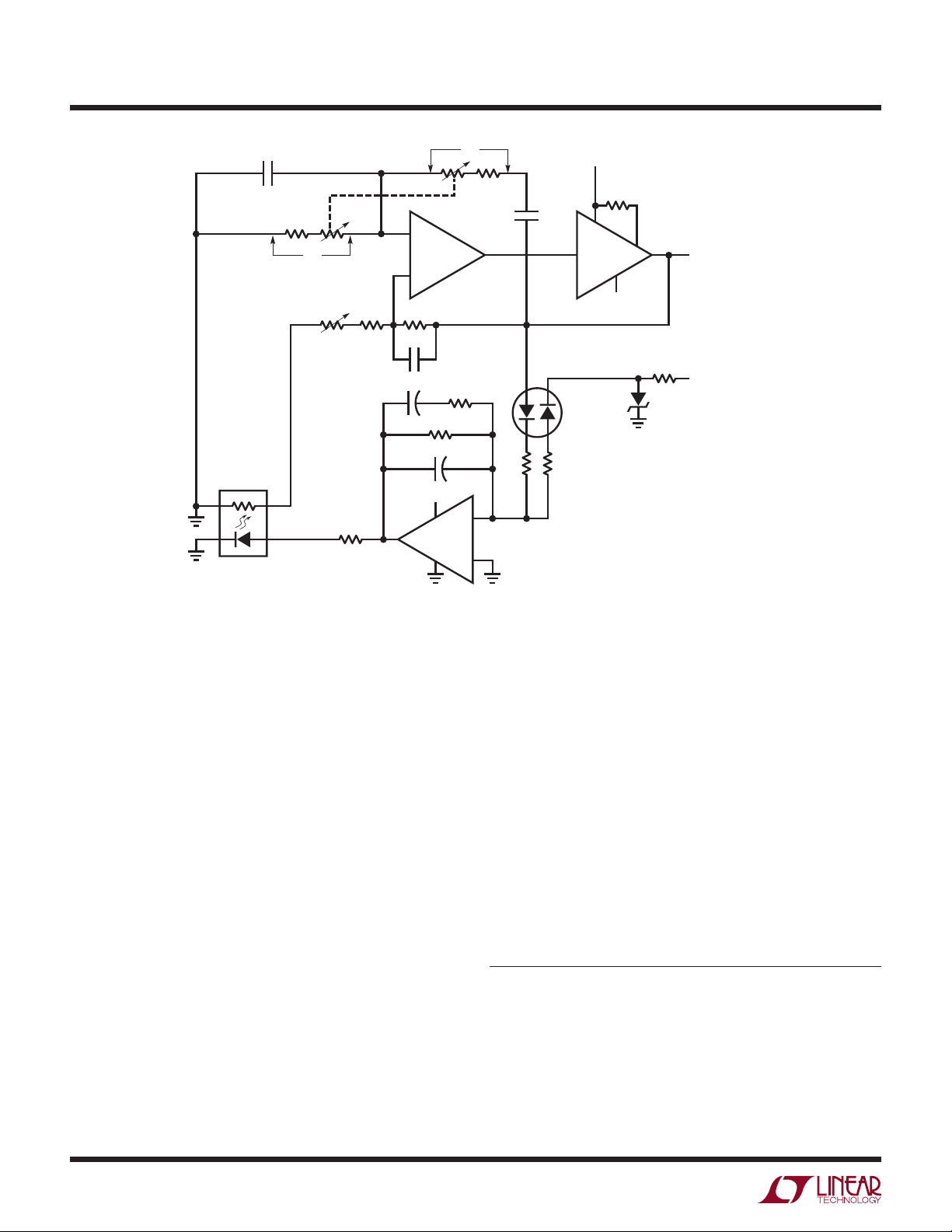
Application Note 43
C1
0.1μF FILM
FREQ SET
200*
2k
R2
2.4k
500
DISTORTION
TRIM
**
100
* = 1% FILM RESISTOR
** = VACTEC VTL5C10 OR CLAREX CLM410
LT1115, LT1010 = ±15V SUPPLY
LT1006 = 15V SUPPLY
R1
200*
2k
OSCILLATOR
+
LT1115 LT1010
C2
0.1μF
FILM
–
–15V –15V
5.6k
10pF
10μF
+
120k
+
15V
1μF
1k
MOUNT
1N4148s
IN CLOSE
PROXIMITY
10k* 14k*
–
LT1006
AGC LOOP
+
AN43 F47
15V
R
49.9Ω
2
BOOST
4
4.7k
5V
LT1029
20V
OUTPUT
P-P
1.5kHz TO 15kHz
–15V
Figure 47. Replacing Q1 with an Optically Driven CdS Photocell Eliminates Resistance Modulation Trim
running in single supply mode. This permits true integrator
operation and eliminates any possibility of reverse biasing
the (downsized) feedback capacitor. Additional feedback
6
components aid step response.
Distortion performance
improves slightly to 0.0015%.
The last Wien bridge-based circuit borrows Figure 37’s
common mode suppression technique (which is simply
an AC version of Figure 6’s DC common mode suppression loop) to reduce distortion to vanishingly small levels.
The LT1022 amplifier appears in Figure 48. This amplifier
forces the midpoint of the bridge to virtual ground by
servo biasing the formerly grounded bridge legs. As in
Figure 37, common mode swing is eliminated, reducing
distortion. The circuit’s output (Trace A, Figure 49) contains
less than 0.0003% (3ppm) distortion (Trace B), with no
visible correlation to gain loop ripple residue (Trace C). This
level of distortion is below the uncertainty floor of most
distortion analyzers, requiring specialized equipment for
meaningful measurement. (See Appendix D, guest written
by Bruce Hofer of Audio Precision, Inc., for a discussion
on distortion measurement considerations.)
Diode Bridge-Based 2.5MHz Precision Rectifier/AC
Voltmeter
A final circuit shows a way to achieve low AC error switching
with diode bridge techniques. Diode bridges provide faster,
cleaner signal switching than any other technique.
Note 6: A much better scheme for a low ripple, fast response gain control
loop is nicely detailed in the operating and service manual supplied with
the Hewlett-Packard HP339A Distortion Analyzer.
AN43-32
an43f
Page 33
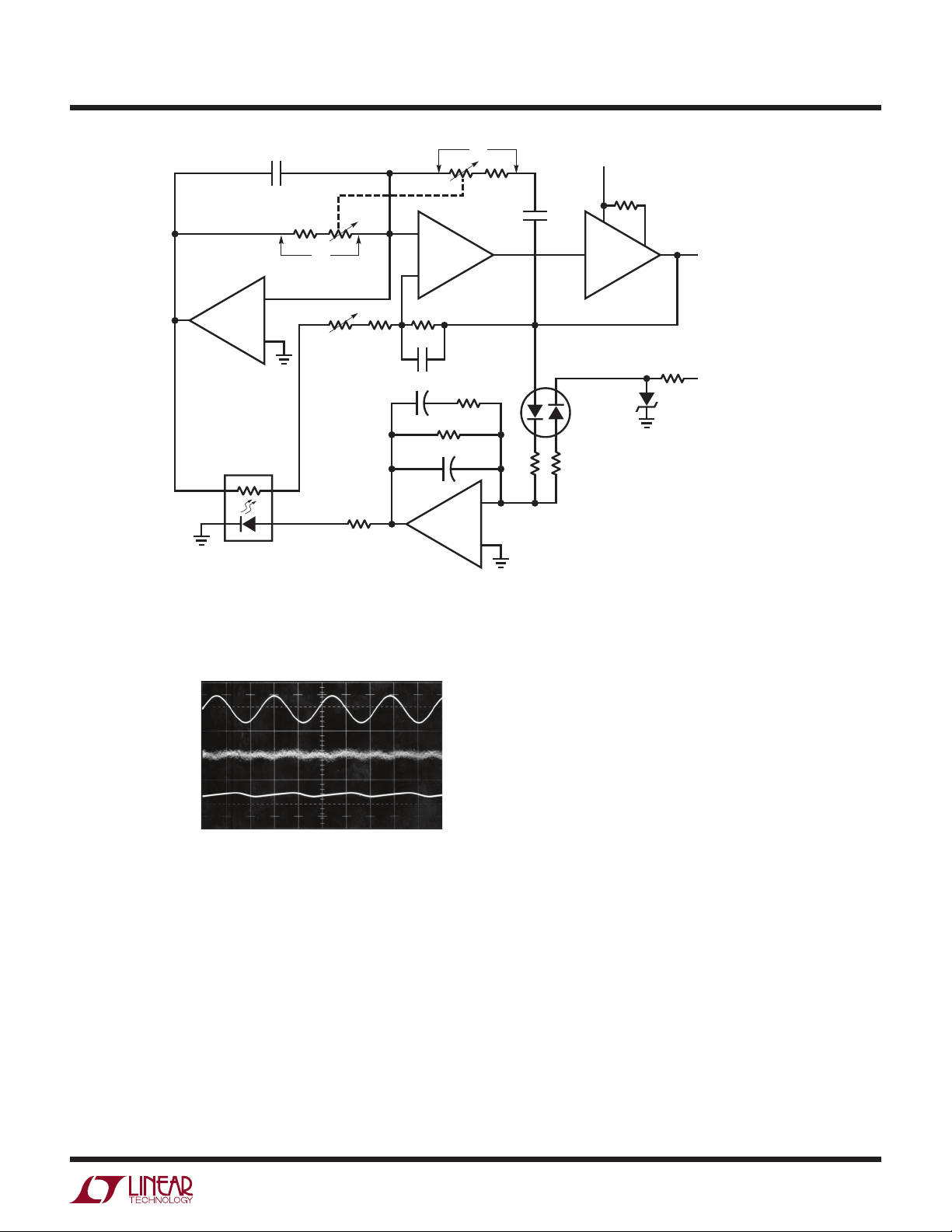
Application Note 43
9
C1
0.1μF FILM
FREQ SET
200*
2k
R2
COMMON MODE
SUPPRESSION
–
LT1022
+
DISTORTION
**
* = 1% FILM RESISTOR
** = VACTEC VTL5C10 OR CLAREX CLM410
LT1022, LT1115, LT1010 = ±15V SUPPLY
LT1006 = 15V SUPPLY
2.4k
500
TRIM
100
R1
200*
2k
OSCILLATOR
+
LT1115 LT1010
C2
0.1μF
FILM
–
5.6k
10pF
10μF
+
120k
1μF
+
1k
MOUNT
1N4148s
IN CLOSE
PROXIMITY
10k* 14k*
–
LT1006
AGC LOOP
+
AN43 F48
15V
R
BOOST
49.9Ω
2
4
4.7k
5V
LT1029
20V
OUTPUT
PP
1.5kHz TO 15kHz
–15V
Figure 48. Adding Common Mode Suppression Lowers Distortion to 0.0003%
A = 2V/DIV
(0.0009% DISTORTION)
INDICATED—0.0003%
B = 1V/DIV
ACTUAL)
C = 0.1V/DIV
(AC-COUPLED)
HORIZ = 200μs/DIV
AN43 F4
Figure 49. Figure 48’s 3ppm Distortion is Below the Noise Floor
of Most Analyzers
Most precision rectifier circuits rely on operational amplifiers to correct for diode drops. Although this scheme
works well, bandwidth limitations usually restrict these
circuits to operation below 100kHz. Figure 50 shows
the LT1016 comparator in an open-loop, synchronous
rectifier configuration which has high accuracy out to
2.5MHz. An input 1MHz sine wave (Trace A, Figure 51)
is zero cross detected by C1. Both of C1’s outputs drive
identical level shifters with fast (delay = 2ns to 3ns), ±5V
outputs. These outputs bias a Schottky diode switching
bridge (Traces B and C are the switched corners of the
bridge). The input signal is fed to the left midsection of
the bridge. Because C1 drives the bridge synchronously
with the input signal, a half-wave rectified sine appears
at the AC output (Trace D). The RMS value appears at
the DC output. The Schottky bridge gives fast switching
without charge pump-through. This is evident in Trace E,
which is an expanded version of Trace D. The waveform
is clean with the exception of very small disturbances
where bridge switching occurs. To calibrate this circuit,
apply a 1MHz to 2MHz 1V
sine wave and adjust the
P-P
an43f
AN43-33
Page 34
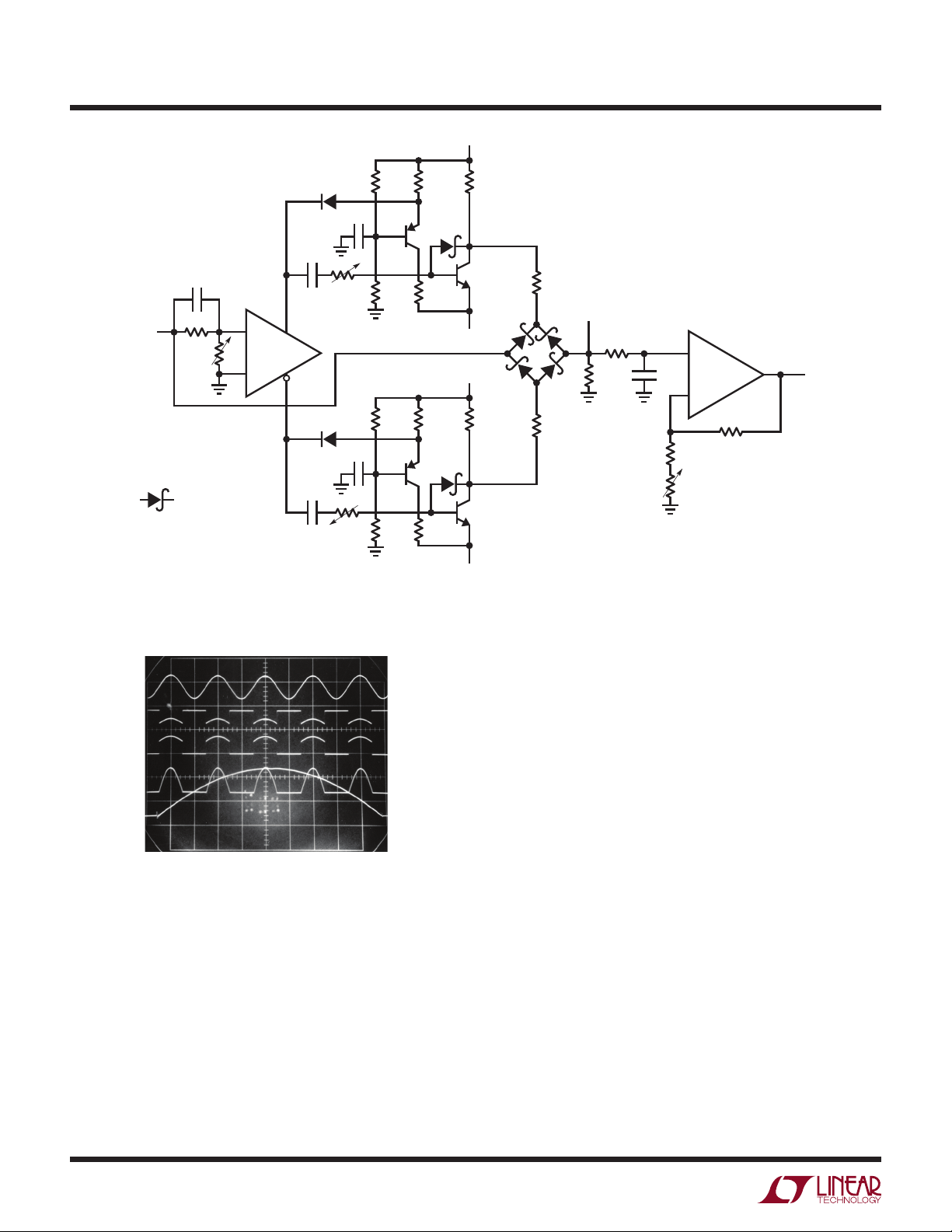
Application Note 43
5V
1N4148
820pF
2000pF
INPUT
TO 1.5V
0V
RMS
RMS
100
DELAY
COMP
2k
+
C1
LT1016
–
500
SKEW
COMP
4.7k 430
0.1
820 820
–5V
5V
180
750
AC OUTPUT
2k
100k
+
1
LT1012
DC OUTPUT
TO 1.5V
0V
DC
DC
–
–5V
180
750
9.1k*
AN43 F50
4k*
2k
GAIN
TRIM
* = 1% FILM RESISTOR
PNP = 2N2907A
NPN = 2N2369
= HP5082-2810
820pF
500
SKEW
COMP
4.7k 430
0.1
820 820
Figure 50. Fast, Bridge-Switched Synchronous Rectifier-Based AC/DC Converter
A = 5V/DIV
B = 10V/DIV
C = 10V/DIV
D = 2V/DIV
E = 1V/DIV
A, B, C, D HORIZONTAL = 500ns/DIV
E HORIZONTAL = 50ns/DIV (UNCALIBRATED)
AN43 F51
Figure 51. Fast AC/DC Converter Operating at 1MHz. Clean
Switching is Due to Bridge Symmetry and Compensations for
Delay and Switching Skew
delay compensation so bridge switching occurs when
the sine crosses zero. The adjustment corrects for the
small delays through the LT1016 and the level shifters.
Next, adjust the skew compensation potentiometers for
minimum aberrations in the AC output signal. These
trims slightly shift the phase of the rising output edge
of their respective level shifter. This allows skew in the
complementary bridge drive signals to be kept within 1ns
to 2ns, minimizing output disturbances when switching
occurs. A 100mV sine input will produce a clean output
with a DC output accuracy of better than 0.25%.
Note: This application note was derived from a manuscript
originally prepared for publication in EDN magazine.
AN43-34
an43f
Page 35

REFERENCES
Application Note 43
1. Sheingold, D.H., “Transducer Interfacing Handbook,”
Analog Devices Inc., 1980
2. Arthur, K., “Transducer Measurements,” Tektronix Inc.,
Concept Series, 1971
3. Parry, C.H., “Diseases of the Heart,” Vol. 2, London,
Underwoods, p. 111, 1825
4. Gordon, J.W., “On Certain Motor Movements of the
Human Body Produced by the Circulation,” J. Anatomy
Physiology, 11:553-559, 1877
5. Starr, I. and Noordegraff. A., “Ballistocardiography in
Cardiovascular Research,” Lippincott, 1967
6. Weissler, A.M., “Non-Invasive Cardiology,” Grune and
Stratton, 1974
7. Meade, M.L., “Lock-In Amplifiers and Applications,”
London: P. Peregrinus, Ltd.
8. Wien, Max, “Measung der induction constanten mit
dern Optischen Telephon, “ Ann. der Phys., Vol. 44,
1891, p. 704-7
9. Meacham, L.A., “The Bridge Stabilized Oscillator,”
Bell System Technical Journal, Vol. 17, p. 574, Oct.
1938
10. Hewlett, William R., “A New Type Resistance-Capacity
Oscillator,” M.S. Thesis, Stanford University, Palo Alto,
California 1939
11. Hewlett, William R., U.S. Patent No. 2,768,872, Jan.
6, 1942
12. Bauer, Brunton, “Design Notes on the ResistanceCapacity Oscillator Circuit,” Parts I and II, HewlettPackard Journal, Nov., Dec., 1949. Hewlett-Packard
Company
13. Williams, Jim, “Thermal Techniques in Measurement
and Control Circuitry,” Linear Technology Corporation
Application Note 5, Linear Technology Corporation,
Milpitas, California 1984
14. Mattheys, R.L., “Crystal Oscillator Circuits,” Wiley,
New York, 1983
15. Hewlett-Packard, “Schottky Diodes for High-Volume,
Low Cost Applications,” Application Note 942, HewlettPackard Company, 1973
16. Tektronix, Inc., “Type 1S1 Sampling Plug-In Operating
and Service Manual,” Tektronix, Inc., 1965
17. Mulvey, J., “Sampling Oscilloscope Circuits,” Tektronix,
Inc., Concept Series, 1970
18. Hill, W. and Horowitz, P., “The Art of Electronics,”
Cambridge University Press, Cambridge, England
1989
19. Bowers, B., “Sir Charles Wheatstone,” Science
Museum, London, England 1975
20. Nahin, Paul J., “Oliver Heaviside: Sage in Solitude,”
IEEE Press, 1988
21. Wilkinson, D.H., “A Stable Ninety-Nine Channel Pulse
Amplitude Analyser for Slow Counting,” Proceedings
of the Cambridge Philosophical Society, Cambridge
England, 46,508. 1950
an43f
AN43-35
Page 36
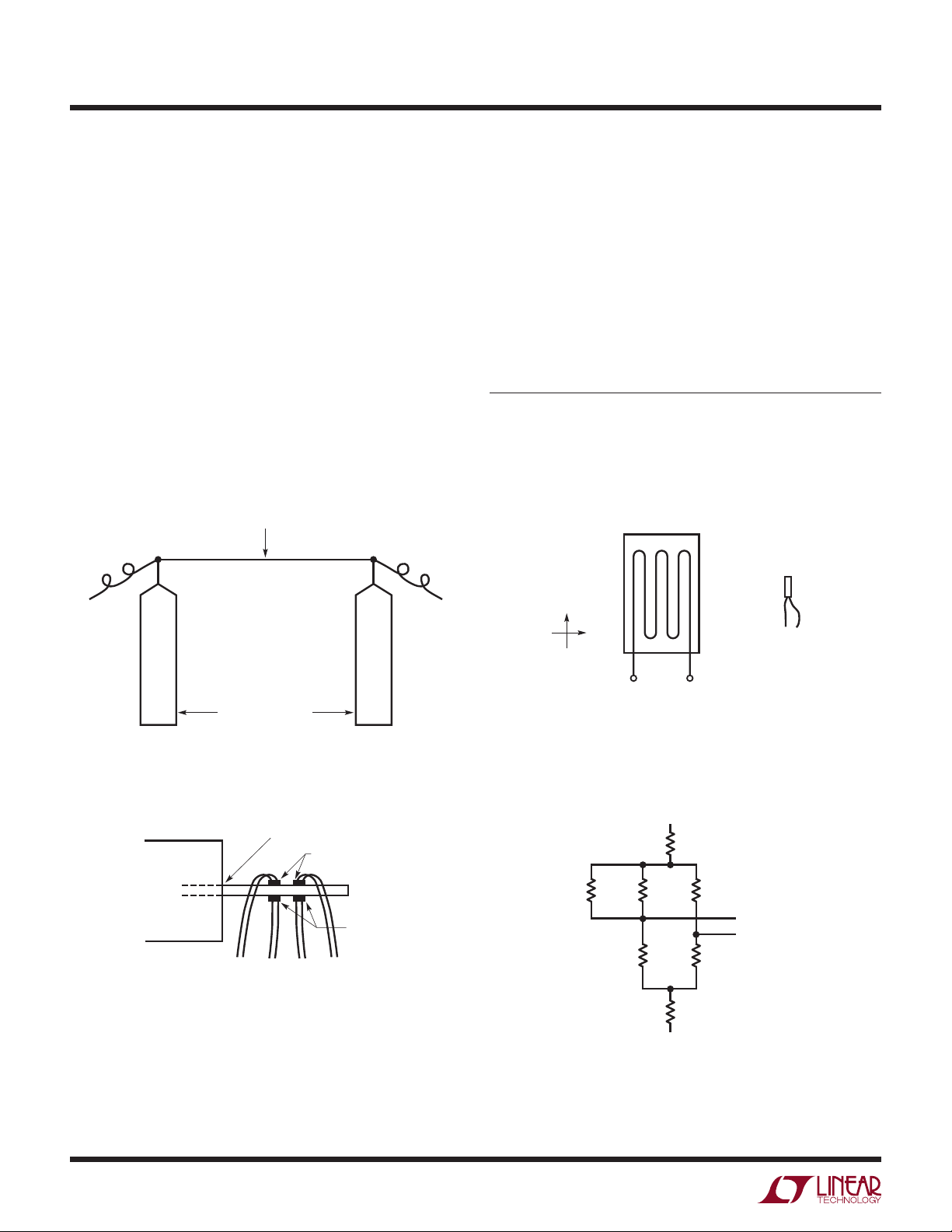
Application Note 43
APPENDIX A
STRAIN GAUGE BRIDGES
In 1856 Lord Kelvin discovered that applying strain to a
wire shifted its resistance. This effect is repeatable, and
is the basis for electrical output strain measurement.
Early devices were simply wires suspended between two
insulated points (Figure A1). The force to be measured
mechanically biased the wire, changing its resistance.
Modern devices utilize foil-based designs. The conductive
material is deposited on an insulated carrier (Figure A2).
Physically they take many forms, allowing for a variety
1
of applications. The gages
are usually configured in a
bridge and mounted on a beam (Figure A3), forming a
transducer.
MECHANICAL FORCE
TAUT WIRE
A useful transducer must be trimmed for zero and gain, and
compensated for temperature sensitivity. Figure A4 shows
a typical arrangement. Zero is set with a parallel trim, with
similar treatment used to set gain. The gain trims include
modulus gages to compensate beam material temperature
sensitivity. Arranging these trims and completing the
mechanical integration involves a fair amount of artistry,
and is usually best left to specialists.
Note 1: The correct spelling is gauge, but prolonged grammatical assaults
have assassinated the “u.” Hence, “gage” assumes a claim to legitimacy.
Note 2: Those finding their sense of engineering prowess unalterably
offended are referred to “SR-4 Strain Gage Handbook,” available from BLH
Electronics, Canton, Massachusetts. Have fun.
X
Y
2
ACTUAL SIZE
AN43 FA2
INSULATING POSTS
AN43 FA1
Figure A1. A Very Basic Strain Gage
BEAM FIXED HERE
GAGES
BEAM
GAGES
AN43 FA3
Figure A3. A Conceptual Strain Gage Transducer. Bending
Force On the Beam Causes Resistance Shifts
Figure A2. A Conceptual Strain Gage. Maximum Device
Sensitivity is with Y-Axis Flexing Into the Page. Practical
Devices Utilize Denser Patterns with Optimized Distribution
of Conductive Material
+EXCITATION
GAIN TRIM/
MODULUS GAGE
ZERO
TRIM
OUTPUT
AN43 FA4
GAIN TRIM/
MODULUS GAGE
–EXCITATION
Figure A4. Simplified Strain Gage Transducer Schematic
an43f
AN43-36
Page 37

Application Note 43
Semiconductor-based strain gage transducers utilize resistive shift in semiconducting materials. These devices,
built in monolithic IC form, are considerably less expensive
than manually assembled foil-based strain gage transducers. They have over ten times the sensitivity of foil-based
devices, but are more sensitive to temperature and other
effects. As such, they are best suited to somewhat less
demanding applications than foil-based gages. Their
monolithic construction and small size offer price and
convenience advantages in many applications. Electrical form is similar to foil-based designs (e.g., a bridge
configuration), although impedance levels are about ten
times higher. The following guest written section details
their characteristics.
SEMICONDUCTOR BASED STRAIN GAGES
Daniel A. Artusi
Randy K. Frank
Motorola Semiconductor Products Sector
Discrete and Special Technologies Group
Strain gage technology, while based on a phenomena which
dates back to the nineteenth century, has been of major
importance in the areas of stress analysis, structural testing
and transducer fabrication for more than 40 years.
First reports on semiconductor piezoresistive technology
3
dates back to the observation by C.S. Smith
in the early
1950’s of large piezoresistive coefficients in Silicon and
Germanium.
amplifiers) on the same chip. The first phase of integration
for silicon pressure sensors occurred when the strain gage
and the diaphragm were combined into one monolithic
structure. This was accomplished using the piezoresistive
effect in semiconductors. A strain gage can be diffused
or ion-implanted into a thin silicon diaphragm which has
been chemically etched into a silicon substrate.
Piezoresistivity
In order to understand the implementation in silicon of
strain gages, it is necessary to review the piezoresistive
effect in silicon.
The analytic description of the piezoresistive effect in cubic
silicon can be reduced to two equations which demonstrate
the first order effects.
= PO I1(π11X1 + π12X2) (1)
ΔE
1
= PO I2π44X6 (2)
ΔE
2
where ΔE
and ΔE2 are electric field flux density, PO is the
1
unstressed bulk resistivity of silicon, Is are the excitation
current density, πs are piezoresistive coefficients and Xs
are stress tensors due to the applied force.
The effect described by equation (1) is that utilized in
a pressure transducer of the Wheatstone bridge type.
Regardless of whether the designer chooses N-type
or P-type layers for the diffused sensing element, the
piezoresistive coefficients π
and π12 equation (1) will
11
be oppose in sign.
There are several advantages to implementing strain gages
using semiconductor technology. The immediate one is
the very high gage factors of approximately two orders
of magnitude higher than metallic gages. These higher
gage factors allow improved signal-to-noise ratios for the
measurement of small dynamic stresses and simplifies
the signal conditioning circuitry.
Another advantage is the precise control of the piezoresistive coefficients including magnitude, sign, and the
possibility of transverse and shear responses. Additional
advantages are low cost, small size, and compatibility with
semiconductor processing technology which allows for
integration of additional circuit elements (i.e., operational
This implies that through careful placement, and orientation with respect to the crystallographic axis, as well as a
sufficiently large aspect ratio for the resistors themselves,
it is possible to fabricate resistors on the same diaphragm
which both increase and decrease respectively from their
nominal values with the application of stress.
The effect described by equation (2) is typically neglected
as a parasitic in the design of a Wheatstone bridge device. A
closer look at its form, however, reveals that the incremental
electrical field flux density, ΔE
, is monotonically increasing for increasing X6.
X
6
Note 3: Smith C.S., “Piezoresistance Effect in Germanium and Silicon,”
Physical Review, Volume 94, November 1, 1954 Pages 42-49.
, due to the applied stress,
2
an43f
AN43-37
Page 38
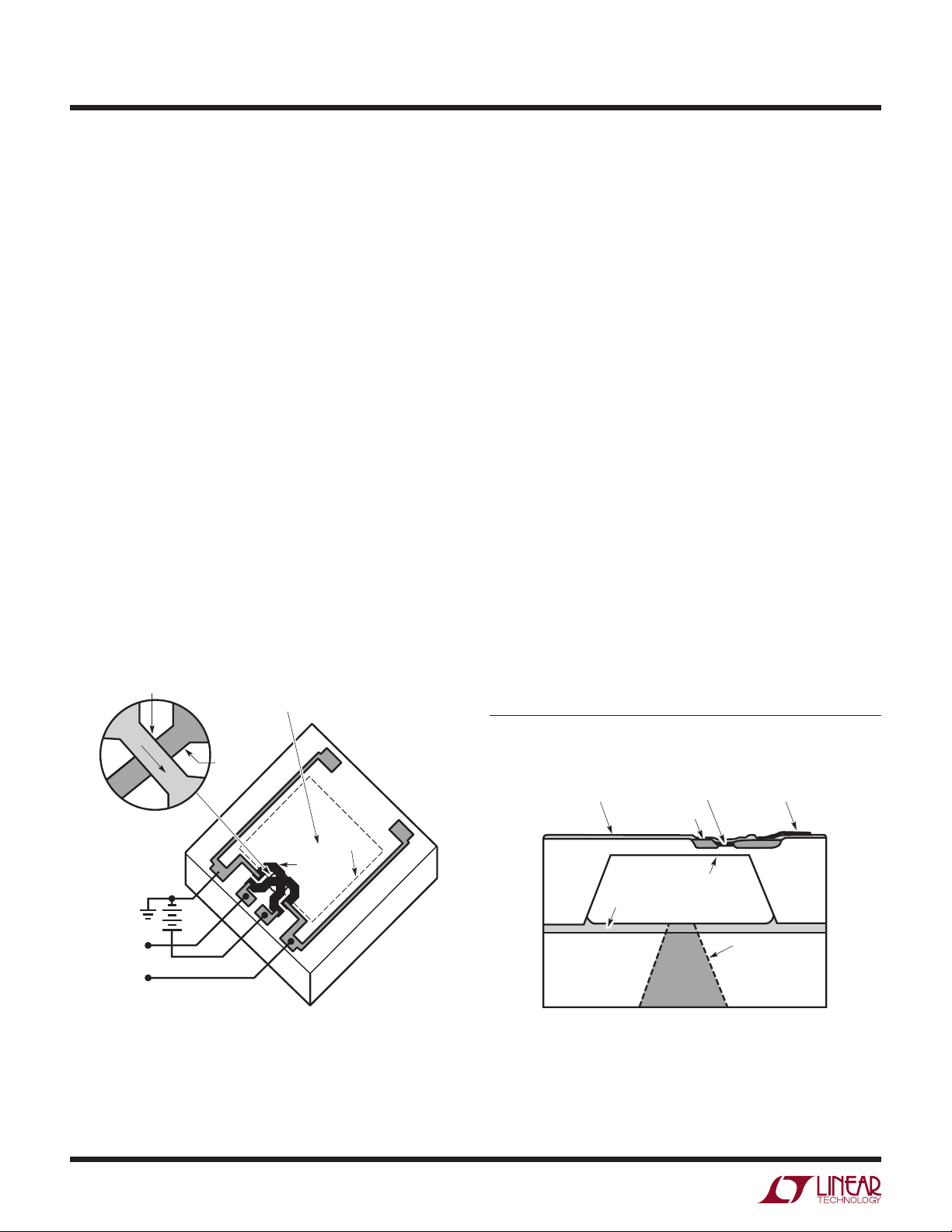
Application Note 43
In fact, equation (2) predicts an extremely linear output
since it depends on only one piezoresistive coefficient
and one applied stress. Furthermore, the incremental
electric field can be measured by a single stress sensitive
element. This forms the theoretical basis for the design
of the transverse voltage or shear stress piezoresistive
strain gage.
Shear Stress Strain Gage
Figure A5 shows the construction of a device which
4
optimizes the piezoresistive effect of equation (2).
The
diaphragm is anisotropically etched from a silicon substrate. The piezoresistive element is a single, 4-terminal
strain gage that is located at the midpoint of the edge of
the square diaphragm at an angle of 45 degrees as shown
in Figure A5. The orientation of 45 degrees and location
at the center of the edge of the diaphragm maximizes the
sensitivity to shear stress, X
, and the shear stress being
6
sensed by the transducer by maximizing the piezoresistive
coefficient, π
44
.
Excitation current is passed longitudinally through the
resistor (Pins 1 and 3) and the pressure that stresses
ACTIVE
ELEMENT
–
S
NORMAL STRESS FORCE
ONTO DIE
the diaphragm is applied at a right angle to the current
flow. The stress establishes a transverse electric field in
the resistor that is sensed as an output voltage at Pins 2
and 4, which are the taps located at the midpoint of the
resistor. The single element shear-stress strain gage can
be viewed as the mechanical analog of a Hall effect device.
Figure A6 shows a cross section of a pressure transducer
implemented in silicon and using the technique described.
A differential pressure sensor chip is accomplished by
opening the back side of the wafer.
Temperature Compensation and Calibration
The transverse voltage shear stress piezoresistive pressure
transducer has been shown to present certain advantages
over the Wheatstone bridge configuration. Specifically, improved linearity, and a more consistent reproducible offset
(since it is defined by a single photolithographic step), as
well as the added advantage of integrating stresses over
a smaller percentage of the flexural element.
Very predictably, the transducer exhibits a negative
temperature coefficient of span with a nominal value of
0.19%/°C, as well as a temperature coefficient of offset
that can be in the range of ±15μV/°C or slightly larger
before compensation. TC of span is due to the decrease
of the piezoresistive coefficients with temperature due to
increased thermal scattering in the lattice structure.
Note 4: J.E. Gragg, U.S. Patent 4,317,126
+
S
+
+
V
OUT
–
V
OUT
Figure A5. Basic Sensor Element—Top View Figure A6. Cross Section of Pressure Transducer
AN43-38
V
SUPPLY
VOLTAGE
TAPS
ETCHED DIAPHRAGM
BOUNDARY
TRANSVERSE VOLTAGE
STRAIN GAUGE
AN43 FA5
THERMAL OXIDE
PASSIVATION
ENHANCEMENT
SILICON
WAFER
GLASS FRIT SEAL
SILICON CONSTRAINT
WAFER
DIFFUSED
STRAIN GAUGE
DIFFUSION
ETCHED DIAPHRAGM
(±0.0001" TYP)
METALLIZATION
OPTIONAL
PRESSURE
PORT FOR
DIFFERENTIAL
SENSORS
AN43 FA6
an43f
Page 39
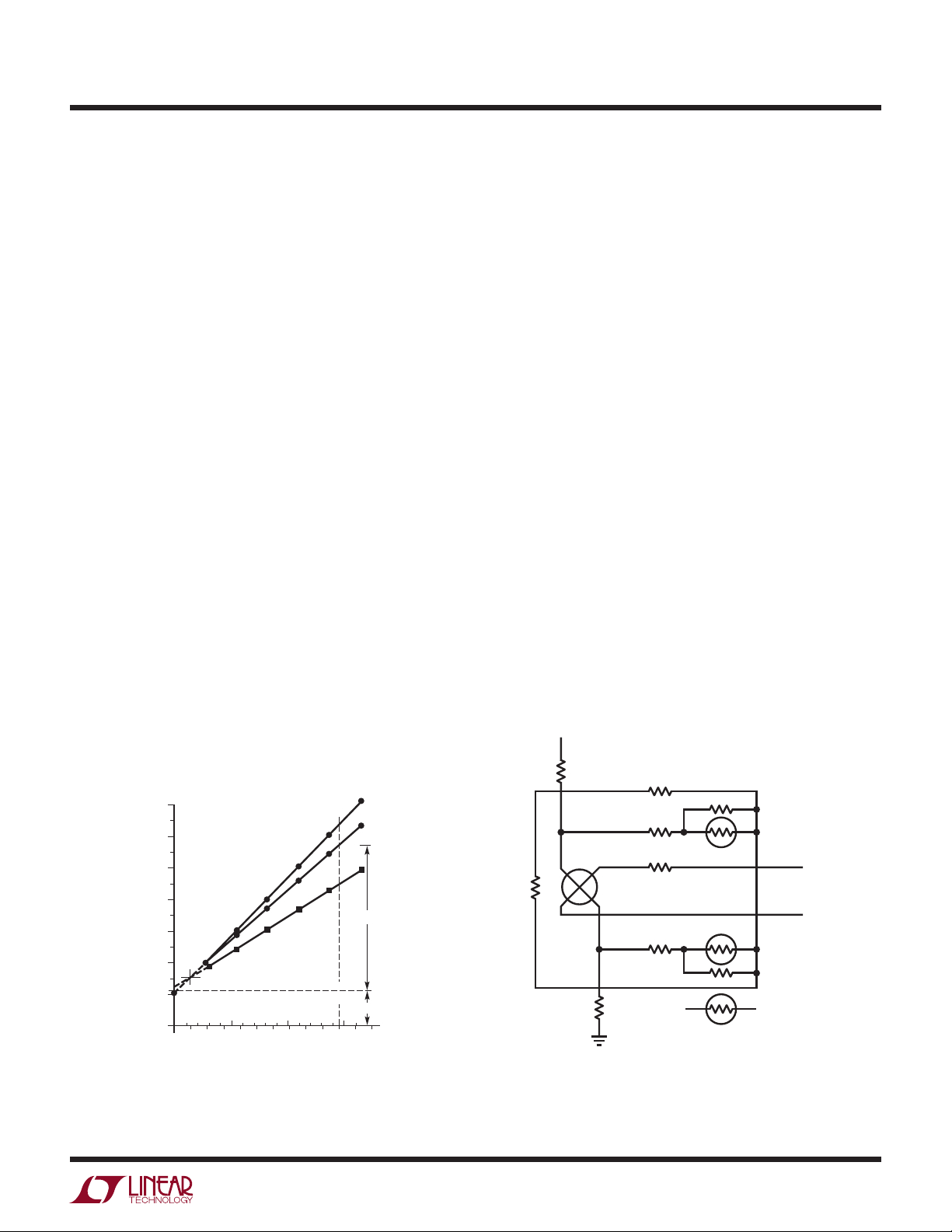
Application Note 43
First let’s consider the relationship of output voltage,
, with excitation voltage, VEX, as predicted by equa-
ΔV
O
tion (2).
ΔV
= w/I (π44X6) VEX (3)
O
It is apparent that the output voltage varies directly with
excitation, by a factor w/I(π
output is ratiometric to the excitation, V
), or conversely that the
44X6
.
EX
A typical output characteristic for an uncompensated
transducer with a constant V
applied is shown in
EX
Figure A7. Hence, it is apparent that by increasing the
supply voltage at the same rate that the full-scale span is
decreasing, the undesired temperature dependence of span
may be eliminated. This is accomplished by means of a
very low TCR resistor placed in series with the transducer
excitation legs which, by design, have a TCR of 0.24%/°C
(Figure A8). If the value of the zero-TCR span resistor is
appropriately chosen, it will decrease the “net” TCR of the
combination to the ideal +0.19%/°C required to exactly
compensate the negative TC of SPAN. This technique is
known as “self-compensation,” and can be utilized in the
described manner or with a constant current excitation
and a parallel TC span compensation resistor.
The passive circuit utilized to achieve calibration and
temperature compensation is shown in Figure A8. Since
the single element design uses only one resistor for both
the input and the output, a self-compensation scheme
can be employed. This technique utilizes the temperature
OUTPUT VS PRESSURE DIFFERENTIAL
70
60
50
)
DC
40
30
OUTPUT (mV
20
10
0
0
MEASURED AT 3V
“PIVOT POINT”
PRESSURE (PSI)
510
20 40
PRESSURE (KPA)
DC
(TYPICAL)
60
EXCITATION
–40°C
25°C
125°C
15
80 100 120
SPAN
OFFSET
AN43 FA7
coefficient of the input resistance (TCR) to generate a
temperature dependent voltage. The TCR of the strain
gage has been specifically designed to be greater in absolute value than the temperature coefficient of the span,
so placing additional passive resistive elements in series
with the strain gage modifies the effective TCR and allows
temperature compensation based on the input resistance
value at room temperature. A constant voltage source is all
that is necessary external to the device to ensure accurate
operation over a wide temperature range.
The self-compensation technique eliminates the requirement for thermistors which are used in most externally
compensated Wheatstone bridge pressure sensors. In
addition to the cost and nonlinearity characteristics of
thermistors, their negative temperature coefficient precludes their integration on silicon. Thin film resistors, on
the other hand, are easily deposited on the strain gage
substrate using techniques similar to those required for
the metallization of wire bond pads used to make connection to external leads. The laser trimming technique is
similar to that used in the manufacturing of high accuracy,
monolithic, 16-bit analog-to-digital and digital-to-analog
data converters, except that in the case of a pressure
transducer, the silicon diaphragm is exercised over the
pressure range during the trimming procedure.
+V
S
PIN 3
RS1*
INPUT
RESISTANCE = R
RP*
GND
R
S2
PIN 1
R
*
OFF1
RT
*
X
*
COFF1
RT
COFF2
*LASER-TRIMMED ON CHIP
*
AN43 FA8
THERMISTOR
PIN 2
PIN 4
+V
OUT
–V
OUT
Figure A7. Output Span for Uncompensated Transducer Figure A8. On-Chip Temperature Compensation and Calibration
an43f
AN43-39
Page 40
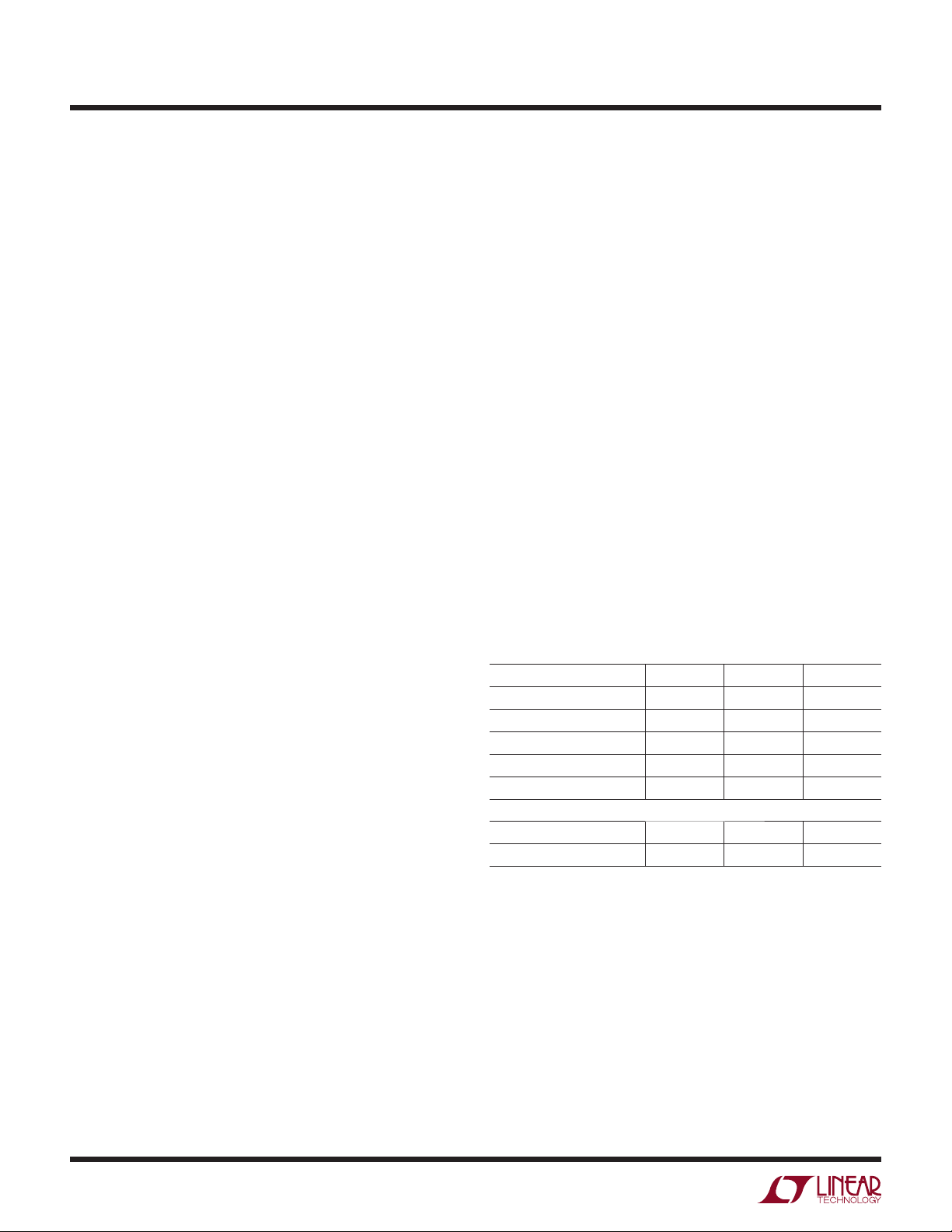
Application Note 43
Four separate functions are accomplished by the laser
trimming operation:
1) Zero calibration
2) Zero temperature compensation
3) Full-scale span temperature compensation
4) Full-scale span calibration
The sequence in which the trimming operation is performed
is important to avoid interaction of components and the
addition of several iterations to the trimming process.
The main factor that allows high volume manufacturing
techniques, however, is the ability to achieve temperature
compensation in the single element sensor without the
necessity to change the temperature during the trim operation. Measurements of the sensor parameters are made
prior to the laser trim operation. Computer calculations
determine which resistors must be trimmed and the amount
of trimming required. Resistor R
OFF1
and R
OFF2
act as a
part of a voltage divider used to calibrate the offset. The
output voltage is set to zero with zero pressure applied by
trimming either offset resistor R
OFF1
or R
OFF2
.
To temperature compensate the offset, thermistors
RTC
OFF1
and RT
, a series of diffused silicon resistors
COFF2
with positive temperature coefficient and different values,
are added as required to the circuit by cutting aluminum
shorting links.
Full-scale span temperature compensation is accomplished
by utilizing self temperature compensation—the addition
of a single, series resistor to the input circuit when a
constant voltage supply is used. The resistor is adjusted
to compensate for changes in span with temperature by
adjusting the magnitude of the excitation voltage applied
to the active element. In order to minimize common mode
errors, the “resistor” is actually split between the supply
and ground side of the input so that RS1 = RS2. The span
is adjusted to meet the specification by trimming resistor
, which is in parallel with the input resistance of the
R
P
active element. The parallel resistor actually interacts
with the series self-compensation network to provide a
series-parallel temperature compensation which enhances
the performance over the temperature range.
Performance of Compensated Sensors
The specification for key parameters of a 30PSI on-chip
temperature compensated pressure sensor is shown in
Figure A9. The excellent linearity is a result of the small
active area of the single element strain gage—essentially
a point condition. The temperature compensation which is
achieved over 0°C to 85°C can be compared to commonly
available alternatives.
PARAMETER MIN TYP MAX
Pressure Range (in kPA) — — 100
Full-Scale Span (in mV) 38.5 40 41.5
Zero Pressure Offset (in mV) — +0.05 +1.0
Sensitivity (mV/PSI) — 1.38 —
Linearity (% FS) — +0.1 +0.25
TEMPERATURE EFFECT FOR 0°C TO 85°C
Full-Scale Span (% FS) — +0.5 +1.0
Offset (in mV) — +0.5 +1.0
Figure A9. Specifications for a Typical Pressure Transducer
AN43-40
an43f
Page 41

APPENDIX B
BRIDGE READOUT—THEN AND NOW
Application Note 43
The contemporary monolithic components used to read
bridge signals are the beneficiaries of almost 150 years
of dedicated work in bridge readout mechanisms. Some
early schemes made fiendishly ingenious use of available
technology to achieve remarkable performance. Figure B1
shows a light beam galvanometer. This device easily resolved currents in the nanoampere range. The unknown
current passed through a coil, producing a magnetic field.
The coil is mounted within a static magnetic field. The two
field’s interactions mechanically biased a small mirror,
which was centrally mounted on a tautly suspended wire.
The mirror may be thought of as the elastically constrained
shaft of a DC motor. The amplitude and sign of the coil
current produced corresponding torque—like mirror
movements. A collimated light source was bounced off the
mirror, and its reflection collected on a surface equipped
with calibrated markings. The instruments high inherent
sensitivity, combined with the gain in the optical angle,
provided excellent results.
The tangent galvanometer (Figure B2) achieved similar
nanoampere resolution. The actual meter movement was
a compass, centrally mounted within a circular coil. Coil
current is measured by noting compass deflection from
the earths magnetic north. Current flow is proportional to
the tangent of the measured deflection angle.
These and similar devices were referred to as “null detectors.” This nomenclature was well chosen, and reflected
the fact that bridges were almost always read at null. This
was so because the only technology available to accurately
digitize electrical measurements was passive. “Bridge
balances,” including variable resistors, resistance decade
boxes and Kelvin-Varley dividers, were cornerstones of
absolute measurements. No source of stable, calibrated
gain was available; although the null detectors provided
high sensitivity. As such, bridge measurement depended
on highly accurate balancing technology and sensitive
null detectors.
Lee DeForest’s triode (1908) began the era of electronic
gain. Harold S. Black attempted to patent negative feedback in 1928, but the U.S. Patent Office, in their governmental wisdom, treated him as a cr ackpot. Black published
in the 1930s, and the notion of feedback stabilized gain
was immediately utilized by more enlightened types.
Figure B1. The Light Beam Galvanometer is Essentially a
Sensitive Meter Movement. It Takes Gain in the Optical Angle of
a Mirror Reflected, Collimated Light Source (Courtesy the J. M.
Williams Collection)
Figure B2. A Tangent Galvanometer Measures Small Currents
by Indicating the Interaction Between Applied Current and the
Earth’s Magnetic Field. Absolute Current Value is Proportional to
the Tangent of the Compass Deflection Angle (Courtesy the J. M.
Williams Collection)
an43f
AN43-41
Page 42

Application Note 43
The technology of the day did not permit development
of feedback-based amplifiers which could challenge
conventional bridge techniques. While Hewlett could use
feedback to build a dandy sinewave oscillator, it simply
was not good enough to replace Kelvin-Varley dividers
and null detectors. Doing so required amplifiers with
very high open-loop gains and low zero drift. The second
requirement was notably difficult and elusive.
E.A. Goldberg invented the chopper-stabilized amplifier
in 1948, finally making stable zero performance practical. Electronic analog computers quickly followed, and
historic George A. Philbrick Researches produced the
first commercially available general purpose op amps in
the 1950s.
Null detectors were the first bridge components to feel the
impact of all this. A number of notable chopper-stabilized
bridge null detectors were produced during the 1950s
and 1960s. All of these were essentially chopper-based
operational amplifiers configured as complete instruments.
Notable among these was the Julie Research Laboratories sub-microvolt sensitivity ND-103, which featured a
93Hz mechanical chopper (to avoid any interaction with
60Hz noise components). The Hewlett-Packard HP-425
had similar sensitivity, and used a small synchronous
1
clock motor, photocells and incandescent lamps
in an
elegantly simple photo-chopping scheme. Latter versions
of this instrument (the HP-419A) were completely solid
state, although retaining a neon lamp-photocell chopping
arrangement. Battery operation permitted floating the
instrument across the bridge.
Concurrent to all this was the development of rackmounting-based devices called “instrumentation amplifiers.”
These devices, designed to be applied at the system level,
featured settable gain and bandwidth, differential inputs,
and good zero point stability. Some were chopper stabilized
while others utilized transistorized differential connections.
Sold by a number of concerns, they were quite popular
for transducer signal conditioning. These devices were the
forerunners of modern IC instrumentation amplifiers. Their
ability to supply low errors at zero and stable gain made
accurate off-null bridge measurement possible.
The development of analog-digital converters during the
2
1960s
provided the last ingredient necessary for practical digitized output off-null bridge measurement. It had
required over 100 years of technological progress to replace
the null detectors and bridge balances. This is something
to think about when soldering in IC instrumentation amps
and A/D converters. What Lord Kelvin would have given
for a single mini-DIP!
Note 1: The Hewlett-Packard Company and light bulbs have had a long
and successful association.
Note 2: The first fully electronic analog-digital converter was developed
by D.H. Wilkinson in 1949 (see References). The first analog-digital
converters available as standard product were probably those produced by
Pastoriza Electronics in the late 1960s.
AN43-42
an43f
Page 43

APPENDIX C
THE WIEN BRIDGE AND MR. HEWLETT
Application Note 43
The Wien bridge is easily the most popular basis for
constructing sinewave oscillators. Circuits constructed
around the Wien network offer wide dynamic range, ease
of tuning, amplitude stability, low distortion and simplicity.
Wien described his network (Figure C1) in 1891. Unfortunately, he had no source of electronic gain available, and
couldn’t have made it oscillate even if he wanted to. Wien
developed the network for AC bridge measurement, and
went off and used it for that.
Forty-eight years later William R. Hewlett combined Wien’s
network with controlled electronic gain in his masters
thesis. The results were the now familiar “Wien bridge
oscillator” architecture and the Hewlett-Packard Company.
Hewlett’s circuit (Figure C2) utilized the relatively new tools
of feedback theory (see References) to support stable oscillation. Two loops were required. A positive feedback loop
1
f =
2πRC
from the amplifier’s output (6F6 plate) back to its positive
input (6J7 first grid) via the Wien bridge provided oscillation. Oscillation amplitude was stabilized by a second,
negative, feedback loop. This loop was closed from the
output (again, the 6F6 plate) back to the amplifiers negative
input (the 6J7 cathode). The now famous lamp supplied a
slight positive temperature coefficient to maintain gain at
the proper value. For reference in interpreting the vacuum
1
configuration, a modern version (text Figure 39) of
tube
Hewlett’s circuit appears as an insert.
Contemporary oscillators usually replace the lamps action
with electronic equivalents to control loop settling time
(see text).
Note 1: For those tender in years, “vacuum tubes” are thermionically
activated FETs, descended from Lee DeForest.
AN43 FC1
Figure C1. Wiens Network
430Ω
–
LT1037
#327
LAMP
0.1μF
Figure C2. A Copy of Hewletts Thesis “Figure 3” Showing
His Original Circuit. Modern Version Shown for Reference
(Hewlett’s Figure Courtesy Stanford University Archives)
+
0.1μF
1.6k
AN43 FC2
1.6k
an43f
AN43-43
Page 44

Application Note 43
APPENDIX D
UNDERSTANDING DISTORTION MEASUREMENTS
Bruce E. Hofer
Audio Precision, Inc.
Introduction
Analog signal distortion is unavoidable in the real world.
It can be defined as any effect or process that causes the
signal to deviate from ideal. Because “distortion” means
significantly different things to different people let us
distinguish between two general categories based upon
frequency domain effect.
A linear distortion changes the amplitude and phase
relationship between the existing spectral components
of a signal without adding new ones. Frequency and
phase response errors are the most common examples.
Both can cause significant alteration of the time domain
waveform.
A nonlinear distortion adds frequency components to the
signal that were never there, nor should be to begin with.
Nonlinear distortion alters both the time and frequency
domain representations of a signal. Noise can be considered
a form of nonlinear distortion in some applications.
Nonlinear distortion is generally considered to be more
serious than linear distortion because it is impossible to
determine if a specific frequency component in the output
signal was present in the input. This brief discussion will
focus on the measurement and meaning of nonlinear
distortion only. The word “distortion” shall hereinafter
be used accordingly.
Measures of Distortion
One of the best and oldest methods of quantifying distortion is to excite a circuit or system with a relatively pure
sinewave and analyze the output for the presence of signal
components at frequencies other than the input sinewave.
The sinewave is an ideal test signal for measuring nonlinear
distortion because it is virtually immune to linear forms of
distortions. With the exception of a perfectly tuned notch
filter, the output of any linear distortion process will still
be a sinewave!
“N-th” harmonic distortion is defined as the amplitude
of any output signal at exactly N times the sinewave
fundamental frequency. If the input sinewave is 400Hz
any second harmonic distortion will show up at 800Hz,
third harmonic at 1200Hz, etc. Spectrum analyzers, wave
analyzers, and FFT analyzers are the typical instruments
used to measure harmonic distortion. These instruments
function by acting as highly selective voltmeters measuring the signal amplitude over a very narrow bandwidth
centered at a specific frequency.
“THD” or Total Harmonic Distortion is defined as the RMS
summation of the amplitudes of all possible harmonics,
although it is often simplified to include only the second
through the fifth (or somewhat higher) harmonics. The
assumption that higher order harmonic content is insignificant in the computation of THD can be quite invalid.
The sinewave distortion of many function generators is
usually dominated by high order harmonic products with
only relatively small amounts of products below the fifth
harmonic. The crossover distortion characteristic of class
AB and B amplifiers can often exhibit significantly high
harmonic content above the fifth order.
A far better definition of THD is to include all harmonics up
to some prescribed frequency limit. Usually the specific application will suggest a relevant upper harmonic frequency
limit. In audio circuits a justifiable upper frequency limit
might be 20kHz to 25kHz because few people can perceive
signals above that range. In practice it has proven desirable
to use a somewhat higher limit (typically 80kHz) because
nonlinear distortion products above 20kHz can provoke
intermodulation problems in subsequent audio stages.
In the world of FM and TV broadcast measurements it is
common practice to use a 30kHz bandwidth limit even
though the signals are inherently limited to 15kHz.
AN43-44
an43f
Page 45

Application Note 43
“THD+N” or Total Harmonic Distortion plus Noise is defined
as the RMS summation of all signal components, excluding
the fundamental, over some prescribed bandwidth. Distortion analyzers perform this measurement by removing the
fundamental sinewave with a notch filter and measuring
the leftover signal. Unfortunately some popular analyzers
have excessive measurement bandwidth (>1MHz) with no
provision for limiting. For the vast majority of applications
a measurement bandwidth of >500kHz serves little purpose
other than to increase noise contribution and sensitivity
to AM radio stations. Today’s better distortion analyzers
offer a selection of measurement bandwidths typically
including 20kHz to 22kHz, 30kHz, 80kHz, and wideband
(300kHz to 500kHz).
At first glance it might appear that THD+N measurements are inferior to THD only measurements because
of the sensitivity to wideband noise. Even with their noise
contribution today’s distortion analyzers offer the lowest
residual distortion, hence the most accuracy in making
ultralow distortion measurements. The typical residual
contribution of spectrum analyzers is usually limited by
their internal mixer stages to about 0.003% (–90dB). FFT
analyzers do not fare much better due to A/D converter
nonlinearities. The very best 16-bit converters available
today do not guarantee residual distortion below about
0.002% although future developments promise to improve
this situation. Distortion analyzers offer the lowest residual
performance with at least one manufacturer claiming
0.0001% (typical).
“IMD” or InterModulation Distortion is yet another tech-
nique for quantifying nonlinearity. It is a much more specialized form of testing requiring a multi-tone test signal.
IMD tests can be more sensitive than THD or THD+N tests
because the specific test frequencies, ratios, and analyzer
measurement technique can be chosen to optimize response to only certain forms of nonlinearity. Unfortunately
this is also one of the biggest disadvantages of IMD testing
because there are so many tests that have been suggested:
SMPTE, CCIF, TIM, DIM, MTM, to name a few.
Distortion Measurement Accuracy
Nonlinear distortion is not a traceable characteristic in
the sense that an unbroken chain of comparisons can be
made to a truly distortion-less standard. Such a standard
does not exist! Real world distortion measurements will
always include the non-zero contributions from both the
sinewave source and the analyzer.
It is a truly challenging task to accurately measure distortion below about 0.01% (–80dB). Indeed, distortion
measurement errors can become quite large near residual
levels. Harmonic contributions from the original sinewave
and the analyzer can add algebraically, vectorially, or even
cancel depending upon their relative phase. There are no
general assumptions that can be made regarding how two
residual contributions will add or subtract.
In the following equation let “M” be the measured value
of the N-th harmonic, let “X” be the magnitude of the
distortion contributed by the analyzer, and let “D” be the
true distortion magnitude of some signal. The measured
distortion will be influenced by the residual analyzer
contribution:
M • sin(2πNft+φ) = D • sin(2πNft) + X • sin(2πNft+θ)
⎧
D+ X
()
⎪
⎪
2
+ X
2
D
M =
⎨
()
⎪
D–X
()
⎪
⎩
Depending upon the relative phase between the distortion
components (θ) a true distortion factor (D) of 0.0040%
could be read as anything between 0.0025% to 0.0055%
if the analyzer’s internal distortion contribution (X) was
0.0015%. Conversely a 0.0040% reading could have
resulted from a true distortion factor of anything from
0.0025% to 0.0055% with the same 0.0015% analyzer
contribution.
It is very important to understand this concept when making distortion readings near the specified residual levels
of the test equipment. A lower reading may not always
signify lower distortion. A low reading could be the result
of a fortuitous cancellation of two larger contributions. It
is also illogical to conclude that the true value of distortion is always less than the reading because the non-zero
residual contributions of the analyzer and sinewave. The
1/ 2
if θ = 0°
if θ =±90°
if θ = 180°
(4)
an43f
AN43-45
Page 46

Application Note 43
service manual of one test equipment manufacturer incredibly states that a 0.0040% reading verifies their residual
distortion guarantee of 0.0020% for both oscillator and
analyzer!
All of the distortion measurement techniques give 0.5dB
to 1.0dB (5% to 10%) reading accuracies at higher reading levels. Some distortion analyzers additionally provide
average versus true RMS detection. Average detection is a
carryover from the past and should be avoided because it
will give erroneously low readings when multiple harmonics are present.
The Ultimate Meaning of THD and THD+N
Measurements
Both THD and THD+N are measures of signal impurity.
Distortion analyzers measure THD+N, not THD. Spectrum,
wave, and FFT analyzers measure individual harmonic
distortion from which THD can be calculated, but not
THD+N. Is one better than the other?
For most applications THD+N is the more meaningful
measurement because it quantifies total signal impurity.
Particularly as we enter the age of A/D and D/A based
systems (for example, digital audio) the engineer is
increasingly confronted with effects and imperfections
that introduce non-harmonic components to a signal.
Wideband noise itself can be viewed as an imperfection to be minimized. It is truly myopic to exclude other
potentially serious and undesirable signal components
in the determination of signal quality just because they
do not happen to be a harmonic of the test signal. Why
should a 60Hz component be acceptable in the calculation
of 20Hz THD but be excluded when testing with a 1kHz
fundamental?
On the other hand THD measurements are distinctly better
than THD+N measurements if the application is to quantify
a simple transfer function nonlinearity. Noise, hum, and
other interference products are not introduced by these
simple forms of nonlinearity and should not influence
the measurement. Examples include the distortion due
to component voltage coefficient effects and non-ohmic
contact behavior.
Given that all real signals contain some distortion, how
much THD or THD+N is acceptable? Only the designer
can make that determination.
APPENDIX E
SOME PRACTICAL CONSIDERATIONS FOR BRIDGE
INTERFACES
It is often desirable to route bridge outputs over considerable cable lengths. Cable driving should always be
approached with caution. Even shielded cables are susceptible to noise pick-up, and input protection is often in
order. Figure E1 shows some options. Simple RC filters
often suffice for filtering. The upper limit on resistor value
is set by amplifier bias current. FET input amplifiers allow
large values, useful for minimizing capacitance size and
input protection. Leakage eliminates electrolytic capacitors
as candidates, and the largest practical non-electrolytic
devices are about 1μF. Often, a single capacitor (dashed
lines) is all that is required. Diode clamps prevent high
voltage spikes or faults (common in industrial environments) from damaging the amplifier. Figure E2 summarizes
some clamp alternatives.
CABLE
Figure E1. RC Filter Alternatives
+
–
AN43 FE1
an43f
AN43-46
Page 47

Application Note 43
LEAKAGE
CLAMP TYPE
FORWARD
DROP
AT 25°C
(15V REVERSE)
≈0.6V ≈10–9A
1N4148
≈400mV ≈10–7A
HP5082-2810
≈0.6V ≈10
–11
A
2N2222
2N4393
Figure E2. Various Devices Offer Different Clamp Characteristics
1
LTC1062
DC ACCURATE
FILTER
4
7
6
5
Figure E3 shows a high order switched-capacitor based
filter. The LTC1062 has no DC error, and offers much better roll-off characteristics than the simple RC types. LTC
Application Note 20, “Application Considerations for an
Instrumentation Lowpass Filter,” presents details.
Figure E4 shows a pre-amplifier used ahead of the remotely
located instrumentation amplifier. The pre-amp raises cable
signal level while lowering drive impedance. The asymmetrical bridge loading should be evaluated when using
this circuit. Usually, the amplifiers input resistor can be
made large enough to minimize its effect.
+
+V
CLOCK
–
1
LTC1062
DC ACCURATE
FILTER
4
7
6
5
+V
CLOCK
AN43 FE3
Figure E3. Switched-Capacitor Techniques Permit a DC Accurate 5th Order Lowpass Filter
+V
–
CABLE
+
–
OUTPUT
+
AN43 FE4
Figure E4. Pre-Amplifer Provides Gain and Low Impedance Drive to Cable
Information furnished by Linear Technology Corporation is believed to be accurate and reliable.
However, no responsibility is assumed for its use. Linear Technology Corporation makes no representation that the interconnection of its circuits as described herein will not infringe on existing patent rights.
an43f
AN43-47
Page 48
Application Note 43
AN43-48
Linear Technology Corporation
1630 McCarthy Blvd., Milpitas, CA 95035-7417
(408) 432-1900 ● FAX: (408) 434-0507
●
www.linear.com
an43f
BA/GP 790 10K • PRINTED IN USA
© LINEAR TECHNOLOGY CORPORATION 1990
 Loading...
Loading...