

Page 1
High Speed Comparator Techniques
Jim Williams
INTRODUCTION
Application Note 13
April 1985
Comparators may be the most underrated and underutilized monolithic linear component. This is unfortunate
because comparators are one of the most flexible and
universally applicable components available. In large
measure the lack of recognition is due to the IC op amp,
whose versatility allows it to dominate the analog design
world. Comparators are frequently perceived as devices,
which crudely express analog signals in digital form—a
1-bit A/D converter. Strictly speaking, this viewpoint is
correct. It is also wastefully constrictive in its outlook.
Comparators don’t “just compare” in the same way that
op amps don’t “just amplify”.
Comparators, in particular high speed comparators, can
be used to implement linear circuit functions which are
as sophisticated as any op amp-based circuit. Judiciously
combining a fast comparator with op amps is a key to
achieving high performance results. In general, op ampbased circuits capitalize on their ability to close a feedback
loop with precision. Ideally, such loops are maintained
continuously over time. Conversely, comparator circuits
are often based on speed and have a discontinuous output
over time. While each approach has its merits, a fusion of
both yields the best circuits.
This effort’s initial sections are devoted to familiarizing
the reader with the realities and difficulties of high speed
comparator circuit work. The mechanics and subtleties
of achieving precision circuit operation at DC and low
frequency have been well documented. Relatively little has
appeared which discusses, in practical terms, how to get
fast circuitry to work. In developing such circuits, even
the most veteran designers sometimes feel that nature is
conspiring against them. In some measure this is true.
Like all engineering endeavors, high speed circuits can only
work if negotiated compromises with nature are arranged.
Ignorance of, or contempt for, physical law is a direct
route to frustration. In this regard, much of the text and
appendices are directed at developing awareness of and
respect for circuit parasitics and fundamental limitations.
This approach is maintained in the applications section,
where the notion of “negotiated compromises” is expressed
in terms of resistor values and compensation techniques.
Many of the application circuits use the LT
to improve on a standard circuit. Some utilize the speed to
implement a traditional function in a non-traditional way,
with attendant advantages. A (very) few operate at or near
the state-of-the-art for a given circuit type, regardless of
approach. Substantial effort has been expended in developing these examples and documenting their operation.
The resultant level of detail is justified in the hope that it
will be catalytic. The circuits should stimulate new ideas
to suit particular needs, while demonstrating the LT1016’s
capabilities in an instructive manner.
L, LT, LTC, LTM, Linear Technology and the Linear logo are registered trademarks of Linear
Technology Corporation. All other trademarks are the property of their respective owners.
®
1016’s speed
an13f
AN13-1
Page 2

Application Note 13
Table of ConTenTs
Introduction ................................................................................................................................................................ 1
The LT1016—An Overview ......................................................................................................................................... 3
The Rogue’s Gallery of High Speed Comparator Problems
Bypassing ............................................................................................................................................................... 4
Probe Compensation .............................................................................................................................................. 4
Probe Bandwidth .................................................................................................................................................... 4
Probe Grounding .................................................................................................................................................... 5
FET Probe Considerations ....................................................................................................................................... 5
Comparator Grounding ........................................................................................................................................... 6
Ground Planes ........................................................................................................................................................ 6
Source Impedance Considerations ......................................................................................................................... 6
Stray Capacitance at Inputs .................................................................................................................................... 7
Output Loading ....................................................................................................................................................... 7
Output Termination ................................................................................................................................................. 7
Input Common Mode Level ..................................................................................................................................... 7
Oscilloscopes .............................................................................................................................................................. 8
Applications
1Hz to 10MHz V→F Converter ................................................................................................................................ 8
Quartz-Stabilized 1Hz to 30MHz V→F Converter .................................................................................................. 10
1Hz to 1MHz Voltage-Controlled Sine Wave Oscillator ......................................................................................... 12
200ns–0.01% Sample-and-Hold Circuit................................................................................................................ 14
Fast Track-and-Hold Circuit ................................................................................................................................... 16
10ns Sample-and-Hold ......................................................................................................................................... 17
2.5µs, 12-Bit A/D Converter .................................................................................................................................. 18
Inexpensive, Fast 10-Bit Serial Output A/D ........................................................................................................... 20
2.5MHz Precision Rectifier/AC Voltmeter .............................................................................................................. 21
10MHz Fiber Optic Receiver .................................................................................................................................. 22
12ns Circuit Breaker ............................................................................................................................................. 23
50MHz Trigger ...................................................................................................................................................... 24
References ................................................................................................................................................................ 25
Appendices
A—About Bypass Capacitors ................................................................................................................................ 25
B—About Probes and Oscilloscopes .................................................................................................................... 27
C—About Ground Planes ...................................................................................................................................... 29
D—Measuring Equipment Response .................................................................................................................... 30
E—About Level Shifts ........................................................................................................................................... 31
AN13-2
an13f
Page 3

THE LT1016—AN OVERVIEW
Application Note 13
A new ultra high speed comparator, the LT1016, features
TTL-compatible complementary outputs and 10ns response time. Other capabilities include a latch pin and
good DC input characteristics (see Figure 1). The LT1016’s
outputs directly drive all TTL families, including the new
higher speed ASTTL and FAST parts. Additionally, TTL
outputs make the device easier to use in linear circuit applications where ECL output levels are often inconvenient.
A substantial amount of design effort has made the LT1016
relatively easy to use. It is much less prone to oscillation
and other vagaries than some slower comparators, even
with slow input signals. In particular, the LT1016 is stable
in its linear region, a feature no other high speed comparator has. Additionally, output stage switching does not appreciably change power supply current, further enhancing
stability. These features make the application of the 200GHz
gain-bandwidth LT1016 considerably easier than other
fast comparators. Unfortunately, laws of physics dictate
that the circuit environment the LT1016 works in must be
properly prepared. The performance limits of high speed
circuitry are often determined by parasitics such as stray
capacitance, ground impedance, and layout. Some of these
considerations are present in digital systems where designers are comfortable describing bit patterns and memory
access times in terms of nanoseconds. The LT1016 can
be used in such fast digital systems and Figure2 shows
just how fast the device is. The simple test circuit allows
us to see that the LT1016’s (Trace B) response to the pulse
generator (Trace A) is faster than a TTL inverter (Trace C)!
In fact, the inverter’s output never gets to a TTL “0” level.
Linear circuits operating with this kind of speed make
many engineers justifiably wary. Nanosecond domain linear
circuits are widely associated with oscillations, mysterious shifts in circuit characteristics, unintended modes of
operation and outright failure to function.
Other common problems include different measurement
results using various pieces of test equipment, inability
to make measurement connections to the circuit without
inducing spurious responses and dissimilar operation
between two “identical” circuits. If the components used
A = 5V/DIV
VERTICAL B = 5V/DIV
C = 2V/DIV
+
V
1
–
4
LT1016
3
+
7
V
PROP DELAY – 100mV STEP
5mV OVERDRIVE – 12ns MAX
20mV OVERDRIVE – 10ns MAX
DIFFERENTIAL PROP DELAY – 2ns MAX
9
Q
OUT
L
8
Q
6
5
–
OUT
Figure 1. The LT1016 at a Glance
OUTPUTS ARE STABLE WHEN THE LT1016
IS IN ITS LINEAR REGION.
REGARDLESS OF HOW SLOWLY THE
INPUT SIGNALS ARE CHANGING
INPUT OFFSET – 1.5mV MAX
INPUT OFFSET DRIFT – 10µV/°C MAX
INPUT BIAS CURRENT – 10µA MAX
COMMON MODE RANGE – +V – 1V –V + 1.25V
GAIN – 2000 MIN
POWER SUPPLY RANGE – +5V/GND – ±5V
TEST CIRCUIT
PULSE
GENERATOR
+
–
7404
OUTPUTS
LT1016
HORIZONTAL = 5ns/DIV
Figure 2. LT1016 vs a TTL Gate
1V
AN13 F02b
an13f
AN13-3
Page 4
Application Note 13
in the circuit are good and the design is sound, all of the
above problems can usually be traced to failure to provide a proper circuit “environment.” To learn how to do
this requires studying the causes of the aforementioned
difficulties.
The Rogue’s Gallery of High Speed Comparator Problems
By far the most common error involves power supply
bypassing. Bypassing is necessary to maintain low supply impedance. DC resistance and inductance in supply
wires and PC traces can quickly build up to unacceptable
levels. This allows the supply line to move as internal current levels of the devices connected to it change. This will
almost always cause unruly operation. In addition, several
devices connected to an unbypassed supply can “communicate” through the finite supply impedances, causing
erratic modes. Bypass capacitors furnish a simple way to
eliminate this problem by providing a local reservoir of
energy at the device. The bypass capacitor acts like an
electrical flywheel to keep supply impedance low at high
frequencies. The choice of what type of capacitors to use
for bypassing is a critical issue and should be approached
carefully (see Appendix A, “About Bypass Capacitors”).
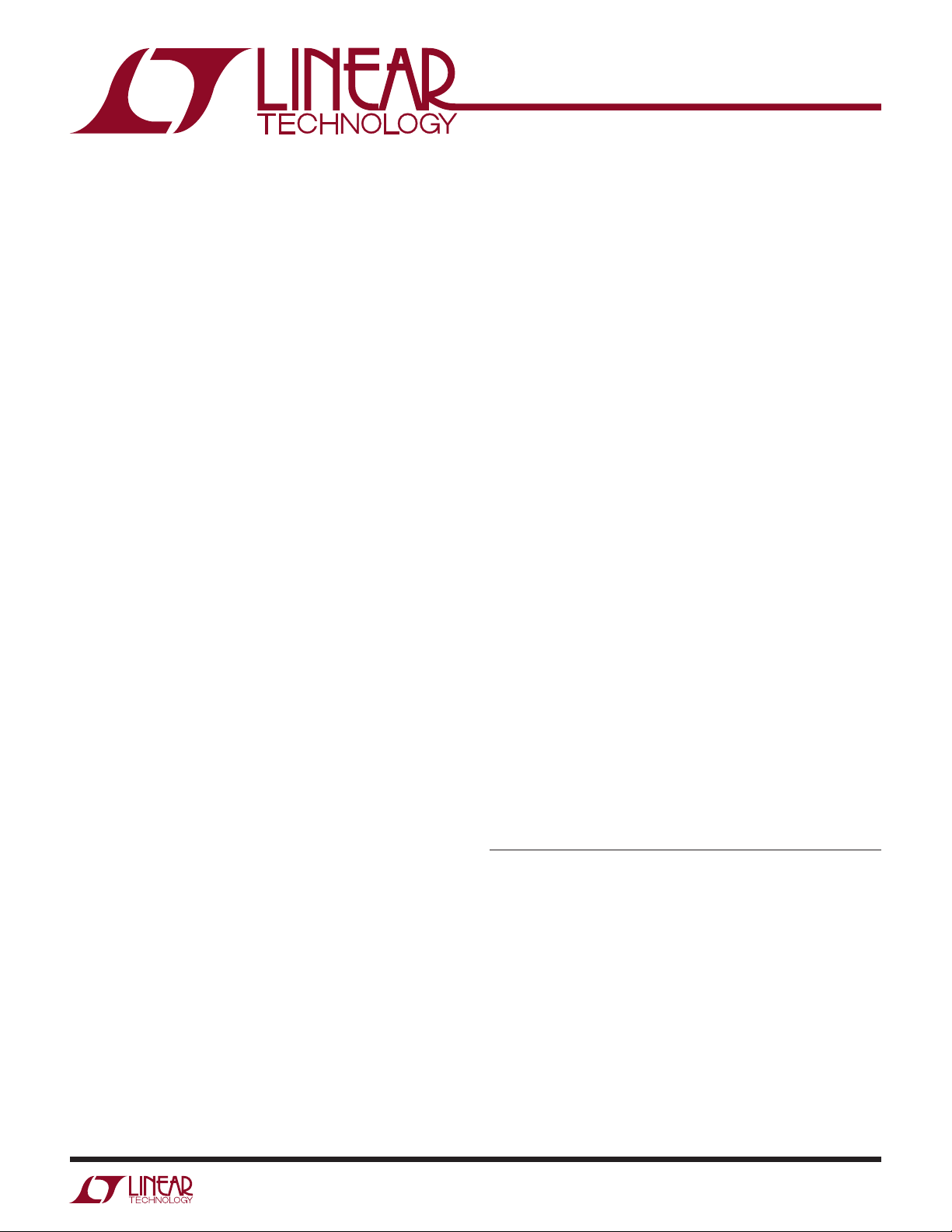
An unbypassed LT1016 is shown responding to a pulse
input in Figure 3. The power supply the LT1016 sees at
its terminals has high impedance at high frequency. This
impedance forms a voltage divider with the LT1016, allowing the supply to move as internal conditions in the
comparator change. This causes local feedback and
oscillation occurs. Although the LT1016 responds to the
input pulse, its output is a blur of 100MHz oscillation.
Always use bypass capacitors.
In Figure 4 the LT1016’s supplies are bypassed, but it still
oscillates. In this case, the bypass units are either too far
from the device or are lossy capacitors. Use capacitors with
good high frequency characteristics and mount them as
close as possible to the LT1016. An inch of wire between
the capacitor and the LT1016 can cause problems.
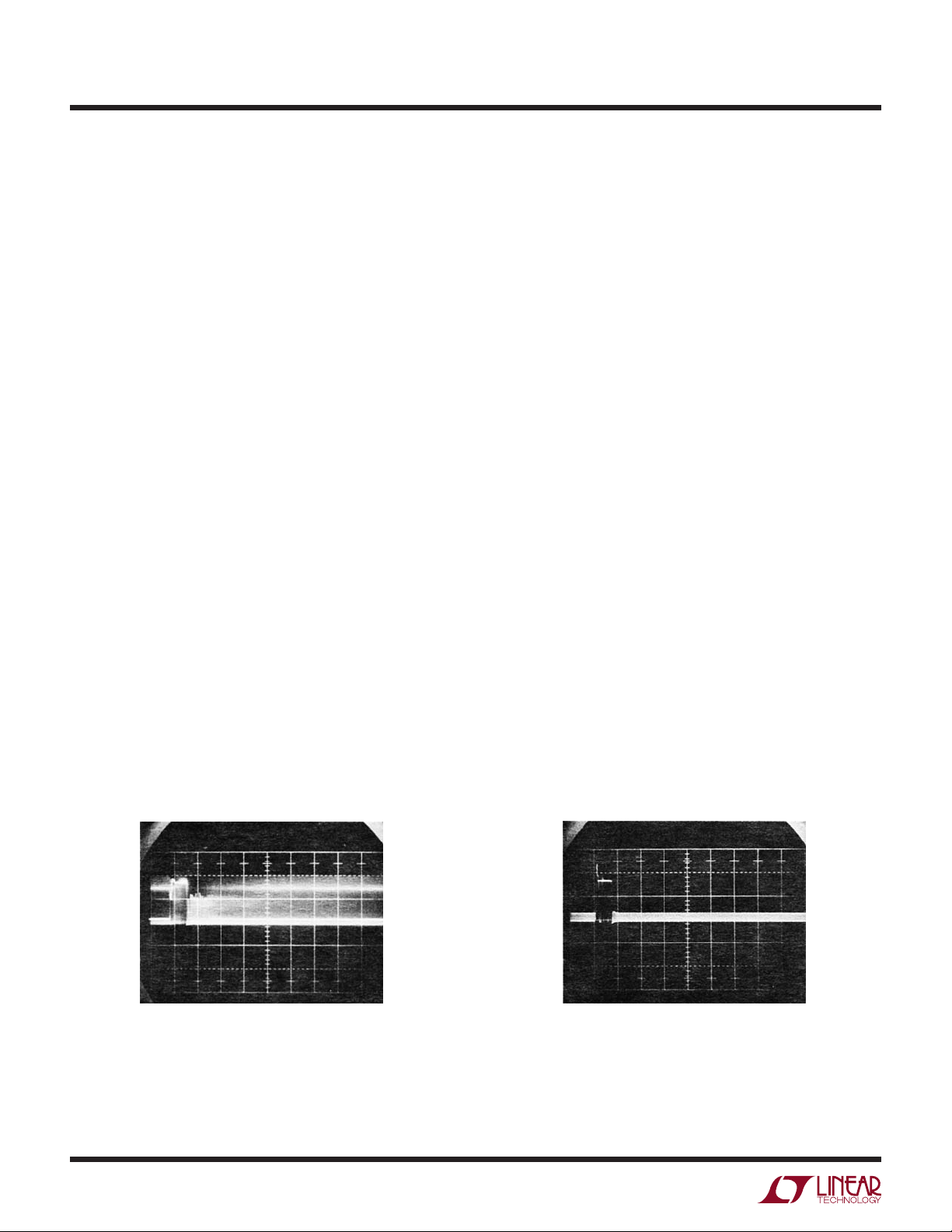
In Figure 5 the device is properly bypassed but a new
problem pops up. This photo shows both outputs of the
comparator. Trace A appears normal, but Trace B shows an
excursion of almost 8V—quite a trick for a device running
from a +5V supply. This is a commonly reported problem
in high speed circuits and can be quite confusing. It is
not due to suspension of natural law, but is traceable to a
grossly miss-compensated or improperly selected oscilloscope probe. Use probes which match your oscilloscope’s
input characteristics and compensate them properly (for
a discussion on probes, see Appendix B, “About Probes
and Scopes”). Figure 6 shows another probe-induced
problem. Here, the amplitude seems correct but the 10ns
response time LT1016 appears to have 50ns edges! In this
case, the probe used is too heavily compensated or slow
for the oscilloscope. Never use 1X or “straight” probes.
Their bandwidth is 20MHz or less and capacitive loading
is high. Check probe bandwidth to ensure it is adequate
for the measurement. Similarly, use an oscilloscope with
adequate bandwidth.
A = 2V/DIV
Figure 3. Unbypassed LT1016 Response Figure 4. LT1016 Response with Poor Bypassing
AN13-4
HORIZONTAL = 100ns/DIV
A = 2V/DIV
HORIZONTAL = 100ns/DIV
an13f
Page 5

A = 2V/DIV
B = 2V/DIV
Application Note 13
VERTICAL = 1V/DIV
HORIZONTAL = 10ns/DIV
Figure 5. Improper Probe Compensation Causes
Seemingly Unexplainable Amplitude Error
In Figure 7 the probes are properly selected and applied
but the LT1016’s output rings and distorts badly. In this
case, the probe ground lead is too long. For general purpose work most probes come with ground leads about six
inches long. At low frequencies this is fine. At high speed,
the long ground lead looks inductive, causing the ringing
shown. High quality probes are always supplied with some
short ground straps to deal with this problem. Some come
with very short spring clips which fix directly to the probe
tip to facilitate a low impedance ground connection. For
fast work, the ground connection to the probe should not
exceed one inch in length. Keep the probe ground con-
nection as short as possible.
The difficulty in Figure 8 is delay and inadequate amplitude
(Trace B). A small delay on the leading edge is followed by
a large delay before the falling edge begins. Additionally,
HORIZONTAL = 50ns/DIV
Figure 6. Overcompensated or Slow Probes Make Edges
Look Too Slow
a lengthy, tailing response stretches 70ns before finally
settling out. The amplitude only rises to 1.5V. A common
oversight is responsible for these conditions.
A FET probe monitors the LT1016 output in this example.
The probe’s common mode input range has been exceeded,
causing it to overload and clip the output badly. The small
delay on the rising edge is characteristic of active probes
and is legitimate. During the time the output is high, the
probe is driven deeply into saturation. When the output
falls, the probe’s overload recovery is lengthy and uneven,
causing the delay and tailing.
Know your FET probe. Account for the delay of its active
circuitry. Avoid saturation effects due to common mode
input limitations (typically ±1V). Use 10X and 100X attenuator heads when required.
A = 2V/DIV
VERTICAL = 1V/DIV
B = 1V/DIV
HORIZONTAL = 20ns/DIV
Figure 7. Typical Results Due to Poor Probe Grounding Figure 8. Overdriven FET Probe Causes Delayed
Tailing Response
HORIZONTAL = 20ns/DIV
an13f
AN13-5
Page 6
Application Note 13
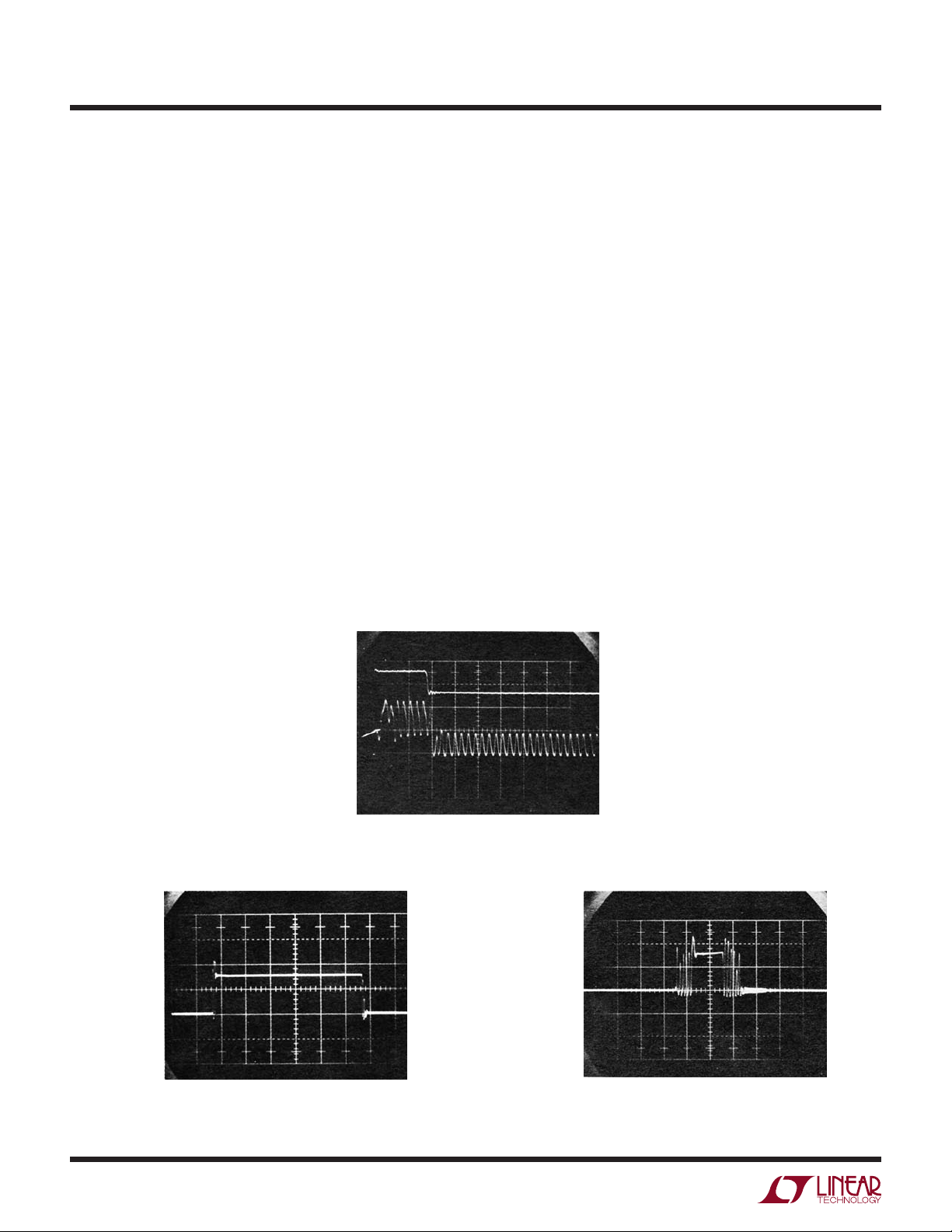
Figure 9 shows the LT1016’s output (Trace B) oscillating
near 40MHz as it responds to an input (Trace A). Note
that the input signal shows artifacts of the oscillation.
This example is caused by improper grounding of the
comparator. In this case, the LT1016’s ground pin connection is one inch long. The ground lead of the LT1016
must be as short as possible and connected directly to a
low impedance ground point. Any substantial impedance
in the LT1016’s ground path will generate effects like this.
The reason for this is related to the necessity of bypassing the power supplies. The inductance created by a long
device ground lead permits mixing of ground currents,
causing undesired effects in the device. The solution here
is simple. Keep the LT1016’s ground pin connection as
short (typically 1/4 inch) as possible and run it directly to
a low impedance ground. Do not use sockets.
Figure 10 addresses the issue of the “low impedance
ground”, referred to previously. In this example, the output is clean except for chattering around the edges. This
photograph was generated by running the LT1016 without
a “ground plane“. A ground plane is formed by using a
continuous conductive plane over the surface of the circuit
board (the theory behind ground planes is discussed in
Appendix C). The only breaks in this plane are for the circuit’s necessary current paths. The ground plane serves
two functions. Because it is flat (AC currents travel along
the surface of a conductor) and covers the entire area of
the board, it provides a way to access a low inductance
ground from anywhere on the board. Also, it minimizes
the effects of stray capacitance in the circuit by referring
them to ground. This breaks up potential unintended and
harmful feedback paths. Always use a ground plane with
the LT1016.
“Fuzz” on the edges is the difficulty in Figure 11. This
condition appears similar to Figure 10, but the oscillation
is more stubborn and persists well after the output has
gone low. This condition is due to stray capacitive feedback
from the outputs to the inputs. A 3kΩ input source impedance and 3pF of stray feedback allowed this oscillation.
The solution for this condition is not too difficult. Keep
source impedances as low as possible, preferably 1kΩ or
less. Route output and input pins and components away
from each other.
A = 1V/DIV
B = 2V/DIV
HORIZONTAL = 100ns/DIV
Figure 9. Excessive LT1016 Ground Path Resistance
Causes Oscillation
VERTICAL = 2V/DIV
HORIZONTAL = 100ns/DIV
Figure 10. Transition Instabilities Due to No Ground Plane Figure 11. 3pF Stray Capacitive Feedback with 3kΩ
VERTICAL = 2V/DIV
HORIZONTAL = 50ns/DIV
Source Can Cause Oscillation
an13f
AN13-6
Page 7
Application Note 13
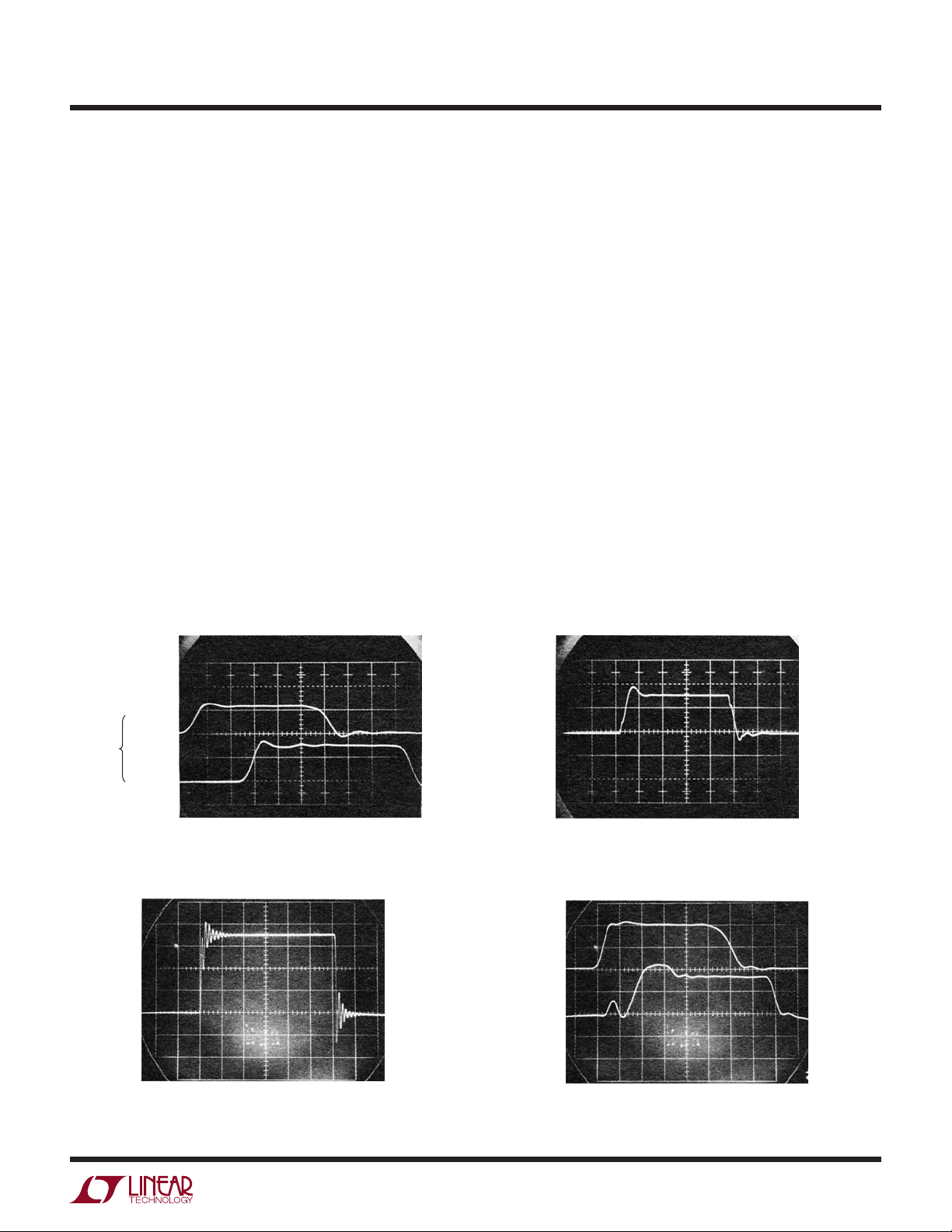
The opposite of stray-caused oscillations appears in
Figure12. Here, the output response (Trace B) badly lags
the input (Trace A). This is due to some combination of
high source impedance and stray capacitance to ground
at the input. The resulting RC forces a lagged response at
the input and output delay occurs. An RC combination of
2kΩ source resistance and 10pF to ground gives a 20ns
time constant—significantly longer than the LT1016’s
response time. Keep source impedances low and minimize
stray input capacitance to ground.
Figure 13 shows another capacitance-related problem.
Here the output does not oscillate, but the transitions
are discontinuous and relatively slow. The villain of this
situation is a large output load capacitance. This could be
caused by cable driving, excessive output lead length or
the input characteristics of the circuit being driven. In most
situations this is undesirable and may be eliminated by
buffering heavy capacitive loads. In a few circumstances
it may not affect overall circuit operation and is tolerable.
Consider the comparator’s output load characteristics and
their potential effect on the circuit. If necessary, buffer
the load.
Another output-caused fault is shown in Figure 14. The
output transitions are initially correct but end in a ringing
condition. The key to the solution here is the ringing. What
is happening is caused by an output lead which is too long.
The output lead looks like an unterminated transmission
line at high frequencies and reflections occur. This accounts
for the abrupt reversal of direction on the leading edge
and the ringing. If the comparator is driving TTL this may
be acceptable, but other loads may not tolerate it. In this
instance, the direction reversal on the leading edge might
cause trouble in a fast TTL load. Keep output lead lengths
short. If they get much longer than a few inches, terminate
with a resistor (typically 250Ω to 400Ω).
A final malady is presented in Figure 15. These waveforms
are reminiscent of the input RC-induced delay of Figure12.
The output waveform initially responds to the input’s
leading edge, but then returns to zero before going high
again. When it does go high, it slews slowly. Additional
odd characteristics include pronounced overshoot and
pulse top aberration. The fall time is also slow and well
delayed from the input. This is certainly strange behavior
A = 2V/DIV
VERTICAL
B = 2V/DIV
HORIZONTAL = 10ns/DIV
Figure 12. Stray 5pF Capacitance from Input to Ground
Causes Delay
A = 1V/DIV
HORIZONTAL = 50ns/DIV
Figure 14. Lengthy, Unterminated Output Lines
Ring from Reflections
A = 2V/DIV
HORIZONTAL = 100ns/DIV
Figure 13. Excessive Load Capacitance Forces
Edge Distortion
A = 5V/DIV
B = 2V/DIV
HORIZONTAL = 20ns/DIV
Figure 15. Input Common-Mode Overdrive
Generates Odd Outputs
an13f
AN13-7
Page 8
Application Note 13
from a TTL output. What is going on here? The input pulse
is responsible for all these anomalies. Its 10V amplitude
is well outside the +5V powered LT1016’s common mode
input range. Internal input clamps prevent this pulse from
damaging the LT1016, but an overdrive of this magnitude
results in poor response. Keep input signals inside the
LT1016’s common mode range at all times.
Oscilloscopes
A few of the examples illustrated dealt with probe-caused
problems. Although it should be obvious, it is worth mentioning that the choice of oscilloscope employed is crucial.
Be certain of the characteristic of the probe-oscilloscope
combination you are using. Rise time, bandwidth, resistive and capacitive loading, delay, overdrive recovery and
other limitations must be kept in mind. High speed linear
circuitry demands a great deal from test equipment and
countless hours can be saved if the characteristics of the
instruments used are well known (see Appendix C, “Measuring Equipment Response”). In fact, it is possible to use
seemingly inadequate equipment to get good results if the
equipment’s limitations are well known and respected. All of
the applications which follow involve rise times and delays
well above the 100MHz to 200MHz region, but 90% of the
development work was done with a 50MHz oscilloscope.
Familiarity with equipment and thoughtful measurement
technique permit useful measurements seemingly beyond
instrument specifications. A 50MHz oscilloscope cannot
track a 5ns rise time pulse, but it can measure a 2ns delay
between two such events. Using such techniques, it is
often possible to deduce the desired information. There
are situations where no amount of cleverness will work
and the right equipment, e.g., a faster oscilloscope, must
be used.
In general, use equipment you trust and measurement
techniques you understand. Keep asking questions and
don’t be satisfied until everything you see on the oscilloscope is accounted for and makes sense.
The LT1016, combined with the precautionary notes listed
above, permits fast linear circuit functions which are difficult or impossible using other approaches. Many of the
applications presented represent the state-of-the-art for a
particular circuit function. Some show new and improved
ways to implement standard functions by utilizing the
LT1016’s speed. All have been carefully (and painfully)
worked out and should serve as good idea sources for
potential users of the device.
APPLICATIONS SECTION
1Hz to 10MHz V→F Converter
The LT1016 and the LT1012 low drift amplifier combine to
form a high speed V→F converter in Figure 16. A variety
of circuit techniques is used to achieve a 1Hz to 10MHz
output. Overrange to 12MHz (V
circuit has a wider dynamic range (140dB, or 7 decades)
than any commercially available unit. The 10MHz fullscale frequency is 10 times faster than currently available
monolithic V→Fs. The theory of operation is based on the
identity Q = CV.
Each time the circuit produces an output pulse, it feeds
back a fixed quantity of charge (Q) to a summing node
(Σ). The circuit’s input furnishes a comparison current at
the summing node. The difference signal at the node is
integrated in a monitoring amplifier’s feedback capacitor.
= 12V) is provided. This
IN
The amplifier controls the circuit’s output pulse generator,
completing a feedback loop around the integrating amplifier. To maintain the summing node at zero, the pulse
generator runs at a frequency which permits enough
charge pumping to offset the input signal. Thus, the output
frequency will be linearly related to the input voltage. A1
is the integrating amplifier.
For low bias, high speed operation, a pair of discrete
FETs directly drives A1’s output stages, replacing A1’s
monolithic input circuitry. A1’s input stage is turned off
by connecting the input pins to the negative 15V rail. The
FET gates become the “+” and “–“ inputs of the amplifier.
0.2μV/°C offset drift performance is obtained by stabilizing
the A1-FET combination with A2, a precision op amp. A2
an13f
AN13-8
Page 9
Application Note 13
measures the DC value of the negative input, compares
it to ground, and forces the positive input to maintain
offset balance in the A1-FET combination. Note that A2 is
configured as an integrator and cannot see high frequency
signals. It functions only at DC and low frequency. The
A1-FET combination is arranged as an integrator with
a 100pF feedback capacitor. When a positive voltage is
applied to the input, A1’s output integrates in a negative
1.8k
15V
–
33pF POLYSTYRENE
100pF
2
+
3
22k
–15V
36k
1k
15V
1k
–
+
7
1
A1
LT318A
–15V
5
4
1
C2
LT1011
100k
+
–
E
0V TO 10V
1Hz TRIM
IN
GAIN TRIM
15V
1k
–15V
6.19k*
2k
9.1k
10M
9.1k
= HP5082-2810
= 2N4393
Q3
Q4
∑
10k
300pF
–
A2
LT1012
+
direction (Trace A, Figure 17). During this period, C1’s
inverting output is low. A very high speed level shifter,
Q1-Q2 (see AppendixD, “About Level Shifters”), inverts this
output and drives the Zener reference bridge. The bridge’s
positive output is used to charge the 33pF capacitor. The
1.2V diode string provides cancellation and temperature
compensation for the diode drops in the bridge so that
the 33pF unit charges to V
+
C1
LT1016
–
5pF
100 220Ω
220k
0.1
5V
15V
1Hz TO 10MHz
OUTPUT
60ns WIDE PULSES
+ VBE Q3.
Z
4.7k
8200.1
1000pF
5V
430
Q1
2N2907
820
–5V
4.7k 4.7k
–15V 15V
Q2
150Ω
150
AN13 F16
LT1009
2.5V
= 1N4148
= 2N2369
Figure 16. 1Hz to 10MHz V→F Converter
A = 1V/DIV
B = 10V/DIV
C = 20mA/DIV
D = 1V/DIV
HORIZONTAL = 100ns/DIV
Figure 17. 10MHz V→Fs Operating Waveforms
an13f
AN13-9
Page 10

Application Note 13
When A1’s output crosses zero, C1’s inverting output goes
high and Q2’s (Trace B) collector goes to –5V. This causes
the 33pF unit to dispense charge into the summing node
via Q4’s V
. The amount of charge dispensed is a direct
BE
function of the voltage that the 33pF unit was charged to
(Q = CV). Q4’s V
compensates the Q3 VBE term in the
BE
capacitor’s charge equation. The current, which flows
through the 33pF unit (Trace C) reflects this charge pumping action. The removal of current from A1’s summing
junction (Trace D) causes the junction to be driven very
quickly negative. The initial negative-going 20ns transient
at A1’s output is due to amplifier delay. The input signal
feeds directly through the feedback capacitor and appears
at the output. When the amplifier finally responds, its output (Trace A) slew limits as it attempts to regain control
of the summing node. The amount of time Q2’s collector
(Trace B) remains at –5V depends on how long it takes
A1 to recover and the 5pF-100Ω hysteresis network at
C1. This 60ns interval is long enough for the 33pF unit
to fully discharge. After this, C1 changes state and Q2’s
collector swings positive. The capacitor is recharged and
the entire cycle repeats. The frequency at which this oscillation occurs is directly related to the voltage-input-derived
current into the summing junction. Any input current will
require a corresponding oscillation frequency to hold the
summing point at an average value of 0V.
Maintaining this relationship at megahertz frequencies
places severe restrictions on circuit timing. The key to
achieving 10MHz full-scale operating frequency is the
ability to transmit information around the loop as quickly
as possible. The discharge-reset sequence is particularly
critical and is detailed in Figure 18. Trace A is the A1
integrator output. Its ramp output crosses 0V at the first
left vertical graticule division. A few nanoseconds later,
C1’s inverting output begins to rise (Trace B), driving the
Q1-Q2 level shifter output negative (Trace C). Q2’s collector begins to head negative about 12ns after A1’s output
crosses 0V. 4ns later, the summing point (Trace D) begins
to go negative as current is pulled from it through the 33pF
capacitor. At 25ns, C1’s inverting output is fully up, Q2’s
collector is at –5V, and the summing point has been pulled
to its negative extreme. Now, A1 begins to take control.
Its output (Trace A) slews rapidly in the positive direction,
restoring the summing point. At 60ns, A1 is in control of
the summing node and the integration ramp begins again.
Start-up and overdrive conditions could force A1’s output
to go to the negative rail and stay there. The AC-coupled
nature of the charge dispensing loop can preclude normal
operation and the circuit may latch, C2 provides a “watchdog” function for this condition. If A1’s output tries to go
too far below zero, C2 switches, forcing the “+” input FET
gate positive. This causes A1’s output to slew positive,
initiating normal circuit action. The diode chain at C1’s
input prevents common mode overdrive at the LT1016.
To trim this circuit, ground the input and adjust the 1k pot
for 1Hz output. Next, apply 10,000V and set the 2kΩ unit
for 10.000MHz output. The transfer linearity of the circuit
is 0.06%. Full-scale drift is typically 50ppm/°C and zero
point error about 0.2µV/°C (0.2Hz/°C).
A = 0.2V/DIV
(UNCALIBRATED)
B = 1V/DIV
C = 5V/DIV
D = 0.5V/DIV
HORIZONTAL = 10ns/DIV
Figure 18. Detail of 60ns Reset Sequence (Whoosh!)
Quartz-Stabilized 1Hz to 30MHz V→F Converter
Figure 16’s upper limit on operating frequency is imposed
by delays in the active elements in the LT1016’s feedback
path. Higher speed is possible by minimizing these delays.
Figure 19 shows a way to do this while retaining good
drift and linearity characteristics. The circuit’s untrimmed
150dB dynamic range is 1000 times greater than commercially available V→F converters, whether monolithic,
hybrid, or modular.
The technique employed allows the LT1016 to roar along
at a 30MHz full-scale output frequency, substantially faster
than any commercially available V→F. The actual V→F
conversion is performed by the circuit shown inside the
dashed lines. This circuit functions similarly to Figure 16.
AN13-10
an13f
Page 11

Application Note 13
The level shift and Zener bridge are eliminated. Q1 charges
the 200pF capacitor, which is unloaded by the Q2-Q3
buffer. When the LT1016’s negative input rises above its
positive input, its output goes low, pulling charge out of
the capacitor via Q4, which serves as a low leakage diode.
The 2.7pF capacitor provides positive feedback. If the left
end of the 100k input resistor is driven from a voltage
source, the LT1016 oscillates over a 1Hz to 30MHz range.
Although this simple circuit is fast, its linearity is poor and
drift exceeds 5000ppm/°C.
0.01
COMP V
6012
15V
LT1021-10
10k*
10k
V
R–
R+
2.49k*
–
A1A
LT1002A
+
7475 7493
7475 7493
7475 7493
E
IN
0V TO 10V
10k
0.68
500Ω
COUNTERS RESET LINE
(TO R01 ON ALL COUNTERS)
–
LT1002B
+
A1B
100k
150k
The remaining components in Figure 19 form a quartzlocked sampled-data loop to correct these terms without
sacrificing speed. The loop works by counting the number
of pulses at the LT1016’s output during a fixed interval
and converting this information to a voltage. The voltage
is compared to the circuit’s input by an amplifier which
drives the LT1016 V→F circuit. This closed loop technique
relies on the stability of the time interval and the digitalto-voltage conversion to achieve circuit stability. Frequent
updating of the loop ensures long term stability. Figure 20
shows how the circuit functions.
5V 15V
510Ω100k
+
200pF
10
0.1
Q4
390
120
–
+
NC
C1
LT1016
2N3904
2.7pF
Q2
2N5638
50Ω 33Ω
Q3
2N5638
50Ω
–15V
5V
0.5µF
510Ω
Q1
2N3906
TO ENABLE LINE
ON ALL 7475s
COUNTERS
LOAD
LINE
1000pF 0.01
C2 C1
G4
5V
30k10k
R1R2
741232Q 1B
1Q2A
G2
G1
AN13 F19
Figure 19. 30MHz V→F Utilizes Sampled Loop for High Stability and Linearity
*1% FILM RESISTOR
= SN74S00
TTL = 5V TO GROUND SUPPLIES
LT1002 = ±15V SUPPLIES
AN13-11
OUTPUT
1Hz TO 30MHz
4.0kHz
XTAL DERIVED
CLOCK
an13f
Page 12

Application Note 13
Waveforms A, B and C are the LT1016’s negative input,
output and positive input, respectively. Their similarity
to Figure 17 (Traces A, B and C) reflects the two circuits’
commonality of operation. Trace D shows the quartzcrystal-derived 4kHz clock. During the clock’s low portion,
the LT1016’s gated output appears at G2’s output (TraceE).
This data is loaded into counters which drive a 12-bit DAC
via the 7475 latches. When the clock goes high, one section of the 74123 one-shot generates a pulse (Trace F),
allowing the latches to acquire the counter’s data. After
this pulse goes low, the one-shot’s second half pulses
(Trace G) the counter’s reset line. At the clock’s next falling
edge the entire cycle repeats. The DAC and its associated
output amplifier (A1A) provide a voltage representation
of the digital word at the 7475 outputs. This voltage is
compared to the circuit’s input by A1B, whose output
drives the LT1016-based V→F. Any drift or nonlinearity
in the V→F will be corrected by the feedback action of
this stabilizing loop. The 10k-0.68µF time constant at A1B
provides loop compensation.
Although it is not obvious, the frequency setting resolution
is much greater than the 12-bit quantization limit of the
DAC. This is because the DAC’s output dithering around the
LSB is integrated to a pure DC level by loop time constants.
Once the DAC has settled within an LSB, its output acts
like a 4kHz clocked pulse width modulator. The slow loop
time constants integrate the width-modulated information
to DC, affording smooth, continuous frequency setting
capability. The practical limit on resolution is due to the
LT1016 oscillator’s short term jitter and is about 25ppm
of reading.
A = 0.5V/DIV
B = 2V/DIV
C = 200mV/DIV
Although this approach allows higher speeds than Figure16, there are some trade-offs. The loop’s sampled
nature, combined with its long time constants, limit settling
time to about 100ms. Thus, although its output is faster
than Figure 16’s, it cannot track quickly varying inputs.
Circuit linearity is DAC limited to 0.025% with full-scale
drift of 50ppm/°C. Zero point drift of 1Hz/°C is due to
A1B’s 0.3µV/°C offset drift.
1Hz to 1MHz Voltage-Controlled Sine Wave Oscillator
Both V→F converters described have pulse outputs.
Many applications such as audio, shaker table driving,
and automatic test equipment require voltage-controlled
oscillators (VCO) with a sine wave output. The circuit
of Figure 21 meets this need, spanning a 1Hz to 1MHz
range (120dB, or 6 decades) for a 0V to 10V input. It is
over 10 times faster than previously published circuits,
while maintaining 0.25% frequency linearity and 0.40%
distortion specifications.
To understand the circuit, assume Q5 is on and its collector (Trace A, Figure 22) is at –15V, cutting off Q1. The
positive input voltage is inverted by A3, which biases the
summing node of integrator A1 through the 3.6k resistor
and the self-biased FETs. A current, –I, is pulled from the
summing point. A2, a precision op amp, DC stabilizes A1.
A1’s output (Trace B, Figure 22) integrates positive until
C1’s input (Trace C) crosses 0V. When this happens, C1’s
inverting output goes negative, the Q4-Q5 level shifter
turns off, and Q5’s collector goes to +15V. This allows Q1
to come on. The resistors in Q1’s path are scaled to produce a current, +2I, exactly twice the absolute magnitude
of the current, –I, being removed from the summing node.
As a result, the net current into the junction becomes +I
and A1 integrates negatively at the same rate its positive
excursion took.
D = 5V/DIV
E = 5V/DIV
F = 5V/DIV
G = 5V/DIV
A, B, C HORIZONTAL = 50ns/DIV
D, E, F, G HORIZONTAL = 50µs/DIV (UNCALIBRATED)
Figure 20. Waveforms for Figure 19. Sampled Data Loop
(Traces D-G) Stabilizes Basic V→F (Traces A-C)
AN13-12
When A1 integrates far enough in the negative direction,
C1’s “+” input crosses zero and its outputs reverse. This
switches the Q4-Q5 level shifter’s state, Q1 goes off and
the entire cycle repeats. The result is a triangle waveform
at A1’s output. The frequency of this triangle is dependent
on the circuit’s input voltage and varies from 1Hz to 1MHz
with a 0V to 10V input.
an13f
Page 13

Application Note 13
15V
0V TO 10V
INPUT
10k
15V
100k
10k*
–15V
10k*
–
A3
LT1012
+
* = 1% FILM RESISTOR
FET = 2N4391
= 1N4148
NPN = 2N2369
= HP5082-2810
1.74k*
Q1
20M
LOW FREQUENCY
SYMMETRY
6.8pF
8pF
3.6*
–I
Q3Q2
2I
100Ω
HIGH FREQUENCY
SYMMETRY
10k
300pF
–
A2
LT1012
+
1000pF
10k
240pF
(POLYSTYRENE)
–
A1
LT318A
+
DISTORTION
1k
TRIM
22pF
4.2k
3.48k*
5.36k*
10k
DISTORTION
TRIM
2
3
15V
0.1
–
LT1056
+
68k
68k
15V
A4
–15V
430
4.7k
Q4
2N2907
820
820
+
C1
LT1016
–
3.65k*
1k
FREQUENCY TRIM
7
6
4
X1
X2
U1
U2
COM
VR
Y1
Y2
AD639
–15V
1000pF
+V
CC
W
Z1
Z2
GT
UP
–V
AN13 F21
820
Q5
LT1009
2.5V
15V
OUTPUT 1Hz TO 1MHz
SINE WAVE
–15V
2.2k
15V
4.7k
4.7k
–15V
–15V
Figure 21. 1Hz to 1MHz Sine Wave Output VCO
A = 50V/DIV
B = 5V/DIV
C = 1V/DIV
D = 5V/DIV
E = 0.5V/DIV
HORIZONTAL = 500ns/DIV
Figure 22. Sine Wave VCO Waveforms
an13f
AN13-13
Page 14

Application Note 13
The LT1009 diode bridge and the series-parallel diodes
provide a stable bipolar reference which always opposes
the sign of A1’s output ramp. The Schottky diodes bound
C1’s “+” input, assuring it clean recovery from overdrive.
The AD639 trigonometric function generator, biased via A4,
converts A1’s triangle output into a sine wave (Trace D).
The AD639 must be supplied with a triangle wave which
does not vary in amplitude or output distortion will result. At higher frequencies, delays in the A1 integrator
switching loop result in late turn on and turn off of Q1.
If these delays are not minimized, triangle amplitude will
increase with frequency, causing distortion level to also
increase with frequency. The total delay generated by the
LT1016, the Q4-Q5 level shifter, and Q1 is 14ns. This small
delay, combined with the 22pF feedforward network at
the LT1016’s input, keeps distortion to just 0.40% over
the entire 1MHz range. At 100kHz, distortion is typically
inside 0.2%. The effects of gate-source charge transfer,
which happens whenever Q1 switches, are minimized by
the 8pF unit in Q1’s source line. Without this capacitor, a
sharp spike would occur at the triangle peaks, increasing
distortion. The Q2-Q3 FETs compensate the temperaturedependent on-resistance of Q1, keeping the +2I/–I relationship constant with temperature.
To adjust this circuit, put in 10.00V and trim the 100Ω pot
for a symmetrical triangle output at A1. Next, put in 100µV
and trim the 100k pot for triangle symmetry. Then, put in
10.00V again and trim the 1k “frequency trim” adjustment
for a 1MHz output frequency. Finally, adjust the “distortion
trim” potentiometers for minimum distortion as measured
on a distortion analyzer (Trace E). Slight readjustment of
the other potentiometers may be required to get lowest
possible distortion.
200ns-0.01% Sample-and-Hold Circuit
Figure 23’s circuit uses the LT1016’s high speed to improve
upon a standard circuit function. The 200ns acquisition
time is well beyond monolithic sample-and-hold capabilities and is matched only by hybrid and modular units
selling in the $200 range. Other specifications exceed the
best commercial unit’s performance. This circuit also gets
around many of the problems associated with standard
sample-and-hold approaches, including FET switch errors
and amplifier settling time. To achieve this, the LT1016’s
high speed is used in a circuit which completely abandons
traditional sample-and-hold methods. When the sampleand-hold command line (Trace A, Figure 24) is high, Q2
conducts current, biasing Q3 on and forcing the 1000pF
capacitor (Trace B) to discharge toward Q4’s emitter potential. Q4’s emitter, in turn, sits at a potential slightly below
Q3’s collector voltage. Q5 and the LT1009, biased from the
input voltage, drive Q4. Concurrently, the TTL gate at the
LT1016 grounds the latch pin (enabling the comparator)
and the comparator’s inverting output (Trace C) goes high.
When the sample-and-hold command line (Trace A) falls,
Q2 and Q3 go off and the Q1 current source charges the
1000pF unit (Trace B) with a fast linear ramp. This capacitor
is buffered by Q7, a current sink loaded source follower.
When Q7’s output reaches the circuit’s input value, the
LT1016’s inverting output (Trace C) switches low. The Q1
current source cuts off in about 2ns and capacitor charging ceases. The LT1016’s low state also means the NOR
gate’s output is high, latching the comparator’s output.
This prevents input line noise or a change in signal from
affecting the stored value in the 1000pF hold capacitor.
Ideally, Q7’s output now sits at exactly the sampled value
of the input voltage. In practice, a slight error exists because of the LT1016’s delay and the turn-off time of Q1
(total 12ns). Because of these delays, the capacitor is
able to charge to a higher voltage than the input before
current stops. This error term is compensated by removing a small quantity of charge from the 1000pF capacitor
when the LT1016’s inverting output goes low. The charge
is removed through the 8pF-1kΩ potentiometer network.
Because the charging ramp’s slope is fixed, the error term
is constant and the compensation works over the circuit’s
±3V input common mode range. The lower four traces
are expanded to show detail of the compensation and the
circuit’s critical ramp turn-off sequence. When the LT1016
goes off (Trace D), the ramp is seen to slightly overshoot
its final value (Trace E)
The 1kΩ-8pF combination pulls enough charge (Trace F)
out of the 1000pF hold capacitor to bring it back to the
correct value. Trace G is the NOW line. It falls low two
gate delays after the LT1016 inverting output goes low.
AN13-14
an13f
Page 15

Application Note 13
When this line goes low, the circuit’s sampled output has
settled from the correction transient and is valid data. The
total time from the falling of the sample-and-hold line to
the NOW output going low will always be inside 200ns.
The circuit’s 200ns acquisition time is due to the high slew
rate of the charging ramp and the action of Q4, Q5 and
the LT1009. These components form a wideband tracking
5V
100
1.5k
Q1
2N5160
(POLYSTYRENE)
Q3
2N2369
Q4
8pF
1000pF
INPUT
±3V
200
Q5
LT1009
2.5V
1.5k
Q2
5.1k0.1
820Ω
1.5k
amplifier whose output is always a fixed amount below the
input. Q7’s current source load (Q6) ensures that its V
GS
does not change. Thus, Q3 will always reset the capacitor
a small, relatively constant amount below any circuit input.
In this way, the ramp does not have to run very long before
it crosses the input value, and acquisition time versus
input voltage is constant. In Figure 25 the circuit is shown
1k100Ω470390Ω5.1k
1k
DELAY
COMP
Q7
2N5486
390
100Ω 300
Q6
–5V OUTPUT SAMPLE–HOLD
–
LT1016
+
L
GATES = SN7402
NPN = 2N2222, UNLESS NOTED
PNP = 2N2907A, UNLESS NOTED
COMMAND (TTL)
NOW
= 1N4148
A = 10V/DIV
B = 1V/DIV
C = 5V/DIV
D = 5V/DIV
E = 10mV/DIV
F = 2mA/DIV
G = 2V/DIV
–15V
Figure 23. 200ns Sample-and-Hold
A, B, C HORIZONTAL = 500ns/DIV
D, E, F, G HORIZONTAL = 20ns/DIV
Figure 24. Fast Sample-and-Hold Waveforms.
Traces A-C Show Ramp-Compare Action.
Traces D-G Detail Delay Compensation
an13f
AN13-15
Page 16

Application Note 13
sampling a bipolar triangle wave. TraceA is the input and
Trace B is the circuit output. Trace C is an expansion of
Trace B (the “smearing” of the sampled pedestals in Trace
C is due to the repetitive asynchronous sampling of the
triangle). The action of the tracking amplifier is readily
apparent. It always resets the ramp to the same point
below the input voltage, regardless of the common mode
level. To calibrate the circuit, ground the input, repetitively
pulse the sample-and-hold command line, and adjust the
1kΩ pot for OV output.
Important specifications for this circuit include:
Acquisition Time <200ns
Common Mode Input Range ±3V
Droop 1µV/µs
Hold Step 2mV
Hold Settling Time 15ns
Feedthrough Rejection >>100dB
A = 2V/DIV
B = 2V/DIV
C = 1V/DIV
A, B HORIZONTAL = 50µs/DIV
C HORIZONTAL = 10µs/DIV
Figure 25. Fast Sample-and-Hold Tracking a Triangle
Wave. Trace C is Expanded to Show the Ramping of
the Circuit’s Output
Fast Track-and-Hold Circuit
The track-and-hold circuit shown in Figure 26 is generically related to the sample-and-hold circuit of Figure 23. It
also forsakes standard techniques in favor of an approach
based on the LT1016’s speed. This circuit’s main blocks
TRACK-HOLD
COMMAND (TTL)
1k
3k
18pF
15V
–15V
10k
15k
0.01
15k
4.7k
15V
5pF
5104.7k
1k
820
Q5
1k
100pF
Q3
2I
Q1
0.001
TEFLON
–I
Q2
1N969
22V
10k
–15V
15V
Q4
2N5486
3k
–15V
3k
1k
5V
+
C1
LT1016
–
= 1N4148
= HP5082-2810
NPN = 2N2369
PNP = 2N2907A
–5V
AN13 F26
± 3V
E
IN
E
OUT
AN13-16
–15V
Figure 26. Comparator-Based Track-and-Hold
an13f
Page 17

Application Note 13
are a switched current source (Q1-Q3), a current sink
(Q2), a FET follower (Q4), and the LT1016. To understand
the circuit, assume the voltage stored in the 0.001µF hold
capacitor is below the input potential and the track-andhold command line (Trace A, Figure 27) is at a TTL “1”
(track mode). Under these conditions Q5 is on and C1’s
output is positive. C1’s inverting output is low and Q3 is
off, allowing the Q1 current source to charge the hold
capacitor. The Q2 current sink is also operating, but at onehalf the current density of Q1. The hold capacitor charges
positively. When Q4’s source (Trace B, Figure 27) ramps
to the input voltage’s value, C1’s outputs reverse state.
Q3 comes on, quickly turning off the Q1 current source.
The 5pF feedforward capacitor speeds up Q1’s turnoff by
bypassing Q3. With Q1 off, Q2’s sink current discharges
the hold capacitor. This causes C1’s output to change
state and oscillation commences (Trace B, Figure 27).
This controlled, 10mV-25MHz oscillation centers itself
around the input voltage’s value. When the track-and-hold
line (Trace A) goes low, Q5 ceases conducting, Q1 and Q2
immediately go off, oscillations cease and the circuit’s
output sits within ±5mV of the input value at the time of
turn-off. This 5mV uncertainty, caused by the nature of
the circuit’s operation, limits accuracy to 8 bits.
Figure 28 shows what happens when a square wave is fed
into the circuit. Trace A is the input. Trace B is the output.
Trace C is the track-and-hold command line and Trace D
is the LT1016’s output. Note that the controlled oscillation
stops cleanly when the track-and-hold line goes low. If the
source-sink transistors were run at higher currents, the
circuit’s output would slew much faster to keep up with
the input’s transitions. The oscillation’s error band would
also proportionately enlarge. The 25MHz update rate allows
this circuit to track a relatively slow signal very closely
with settling time under 10ns when switched into hold.
10ns Sample-and-Hold
Figure 29 shows a 10ns acquisition time sample-and-hold
which can be used with repetitive signals only. Here, the
LT1016 (C1) drives a differential integrator’s (A1) input.
Feedback from the integrator back to the LT1016 closes
a loop around the circuit. Figure 30 shows what happens
when a 1MHz sine wave (Trace A, Figure 30) is applied to
the input. C2 generates a zero crossing signal (Trace B)
and one-shot “A” (Trace C) provides an adjustable width.
One-shot B’s Q output produces a 30ns pulse (Trace D)
which is fed into a logic network with the Q signal. The
two inverter delays in Q’s path give its associated gate a
shorter duration output (Trace F) than Q’s gate (Trace E).
The last gate subtracts these two signals and generates
a 10ns spike. This is inverted (Trace G) and fed to C1’s
latch pin. Each time the latch is enabled the comparator
responds to the condition of the summing junction at its
“+” input. If summing error is positive, A1 pulls current.
If the error is negative, A1 sources current to the junction.
After a number of input cycles, A1’s output settles at a DC
value which is the same as the level sampled during the
time the latch is enabled. The “delay adjust” allows the
10ns sampling “window” to be positioned anywhere on
the input sine wave.
A = 2V/DIV
A = 2V/DIV
B = 2V/DIV
C = 5V/DIV
B = 20mV/DIV
HORIZONTAL = 50ns/DIV
Figure 27. Track-and-Hold Circuit Acquiring an Input Figure 28. Track-and-Hold Responding to a Square Wave Input
D = 5V/DIV
HORIZONTAL = 10µs/DIV
AN13-17
an13f
Page 18

Application Note 13
2k*
0.01
360k*
INPUT
2k*
5V
1k
DELAY ADJUST
+
C2
LT1016
L
–
50k
R
74123A
B Q
A
NC
100pF
CLR
5V
A
R
B
5V
74123B
CLR
Q
Q
C
5V
∑
+
C1
LT1016
L
–
1k
100k*
100k*
0.01
–
+
360k*
AN13 F29
A1
LT318A
OUTPUT
*1% FILM RESISTOR
= 74S04
= 1N4148
= SN74S08
Figure 29. 10ns Sample-and-Hold for Repetitive Signals
A = 20V/DIV
B = 5V/DIV
C = 5V/DIV
D = 5V/DIV
E = 5V/DIV
F = 5V/DIV
G = 5V/DIV
HORIZONTAL = 100ns/DIV
Figure 30. Waveforms for 10ns Sample-and-Hold. 10ns Sampling
Window (Trace G) May be Positioned Anywhere on Input (Trace A)
5µs, 12-Bit A/D Converter
The LT1016’s high speed is used to implement a fast 12-bit
A/D converter in Figure 31. The circuit is a modified form
of the standard successive approximation approach and
is faster than most commercial SAR 12-bit units. In this
arrangement the 2504 successive approximation register
(SAR), A1 and C1 test each bit, beginning with the MSB,
and produce a digital word representing V
’s value. To
IN
get faster conversion time, the clock (C2) is sped up after
the third MSB is converted. This takes advantage of the
segmented DAC used, which has significantly faster settling time for the lower 9 bits.
A1 provides preamplification for C1 while adding only
7ns delay. The preamplification allows clean response to
one-half LSB (1.22mV) overdrives at A1’s input. Figure 32
shows the converter at work. To aid in observing operation,
A1 has been eliminated and the DAC-input node drives
the LT1016 “+” input directly. A1 should be employed in
normal use.
AN13-18
an13f
Page 19

Application Note 13
27pF
PARALLEL
DIGITAL
DATA OUT
15V
LT1021-10
10V
REF
5V
470
1.5k
6.8k*
10k
–
C2
LT1016
+
5V
NC
1k
1k1k
10k**
+ VR–
V
R
0.01
COMP
6012
MSB LSB
QB
2504
CLK
START CC
7474
Q
CLR PRESET
CONV COMMAND
DATA
2.5k**
10k
V
IN
HP5082-2810
± 10V
10pF
10k
–
1.5k
A1
LT318A
+
*TRIM FOR ≈ 6.5MHz WHEN 7474 Q IS HIGH
**PRECISION 0.01% TYPES. VISHAY S-102
= 1N4148
–
LT1016
+
C1
L
7404
NC
AN13 F31
STATUS
(CONVERSION
COMPLETE)
Figure 31. 5µs, 12-Bit SAR Converter. Clock is Sped Up After the Third Bit, Shortening Overall Conversion Time
A = 5V/DIV
B = 0.5V/DIV
C = 5V/DIV
D = 5V/DIV
E = 5V/DIV
HORIZONTAL = 1µs/DIV
Figure 32. Fast SAR Converter Waveforms. Note Clock
(Trace D) Speed-Up After 3rd Bit Conversion
The conversion begins when the “convert command” line
(Trace A, Figure 32) drops low. When this happens the SAR
begins to test each bit. The DAC output (Trace B), fed to the
Schottky-clamped C1 input, sequentially converges toward
final value. After the third MSB has been established, the
7474 Q line goes high (Trace C), forcing the 2.1MHz clock
to shift to 3.2MHz (Trace D). This speeds up conversion of
the remaining 9 bits, minimizing overall A/D time. When
conversion is complete, the status line (Trace E) drops
low and C1’s latch is set by the TTL inverter, preventing
the comparator from responding to input noise or shifts.
The next convert command reinitiates the entire cycle.
Note that on the lowest order bits C1 must accurately
respond to small signals without sacrificing speed. The
high gain-bandwidth required makes this application one
of the most difficult for a comparator. This circuit’s 5µs
conversion time is fast for a 12-bit A/D. Faster conversion time is possible, although the design becomes more
complex. A “stretched” version of this circuit, with 1.8µs
conversion time, appears in AN17, “Considerations for
Successive Approximation A/D Converters”.
an13f
AN13-19
Page 20

Application Note 13
Inexpensive, Fast 10-Bit Serial Output A/D
Figure 33 shows a simple way to build a fast, inexpensive
10-bit A/D converter. This circuit is especially useful where
a large number of converters is required and all of them
can be serviced by one clock. The design consists of a
current source, an integrating capacitor, a comparator
and some gates.
Every time a pulse is applied to the convert command
input (Trace A, Figure 34), Q1 resets the 1000pF capacitor
to 0V (Trace B). This resetting action takes 200ns—the
minimum acceptable convert command pulse width. On
the falling edge of the convert command pulse, the capacitor begins to charge linearly. In precisely 10µs, it charges
to 2.5V (over range to 3.0V is provided). Normally, Q1
would not be able to reset the capacitor to zero due to its
saturation voltage. This effect is compensated by Q4.
V
CE
Ex INPUT
2.5k
0.02%
–
LT1016
+
L
2N3906s
5V
LT1004
1.2V
Q2
3.9k*
2k GAIN TRIM
Q3
2k
This device switches in inverting mode, resulting in a reset
within 1mV of ground. Q1 absorbs most of the capacitor’s
charge and Q4 completes the discharge.
The 10µs ramp is applied to the LT1016’s positive input.
The LT1016 compares the ramp to Ex, the unknown, at its
negative input. For a 0V to 2.5V range, Ex is applied to the
2.5kΩ resistor. For a 0V to 10V range, the 2.5kΩ resistor
is grounded and Ex is applied to the 7.5kΩ resistor. The
2.0k resistor at the positive input provides balanced source
impedance for C1. The output of the LT1016 is a pulse
(Trace C) whose width is directly dependent on the value
of Ex. This pulse width is used to gate a 100MHz clock.
The 74AS00 gate achieves this function and also gates out
the portion of the LT1016 output pulse due to the convert
command pulse. Thus, the 100MHz clock pulse bursts
that appear at the output (Trace D) are proportional to Ex.
7.5k
0.02%
330
100pF
(POLYSTYRENE)
12k
2N2369
Q1
2N2222
A = 5V/DIV
B = 2V/DIV
C = 2V/DIV
D = 5V/DIV
6.21k
–5V
1.5k
390
300pF
Q4
4.7k
–5V
CONV
COMMAND
HP5082-2810
100MHz
CLOCK INPUT
74AS00
SERIAL DIGITAL
DATA OUT
AN13 F33
*3.9k = TRW MTR-5 + 120ppm/°C
1000pF = WECO #32-P – 105 ± 30ppm/°C
Figure 33. Simple, Fast 10-Bit A→D
HORIZONTAL = 2µs/DIV
Figure 34. Waveforms for 10-Bit A→D
an13f
AN13-20
Page 21

For a 0V to 10V input, 1024 pulses appear at full-scale, 512
at 5.00V, etc. The resistor-diode network at the LT1016’s
latch pin ensures clean comparator transitions by locking
the LT1016 outputs after the conversion is completed.
This latch is broken by the next convert command pulse.
Application Note 13
A = 5V/DIV
B = 0.2V/DIV
The current source scaling resistor and ramp capacitor
specified provide good temperature compensation because
of their opposing thermal coefficients. The circuit will
typically hold ±1 LSB accuracy over 0°C to 70°C with an
additional ±1 LSB uncertainty due to the asynchronous relationship between the clock and the conversion sequence.
Figure 35 details the most critical part of the converter’s
operation, the reset phase. Trace A is the convert command.
Trace B is the capacitor (greatly magnified) resetting to
zero. The comparator output appears in Trace C and TraceD
is the gated serial output. Observe that the output pulses
do not appear until the capacitor has started to ramp (just
past mid-screen), even though the comparator is high.
0.1
0.1
4.7k
820
4.7k
820
430
1N4148
820pF
2000pF
RMS
RMS
INPUT
TO 1.5V
0V
100
2k
DELAY
COMP
*1% FILM RESISTOR
PNP = 2N2907A
NPN = 2N2369
= HP5082-2810
+
C1
LT1016
–
500
SKEW
COMP
820pF
C = 1V/DIV
D = 5V/DIV
HORIZONTAL = 50ns/DIV
Figure 35. Figure 33’s Reset Sequence. Q1-Q4
Combination Gives Quick, Low Offset Zero Reset
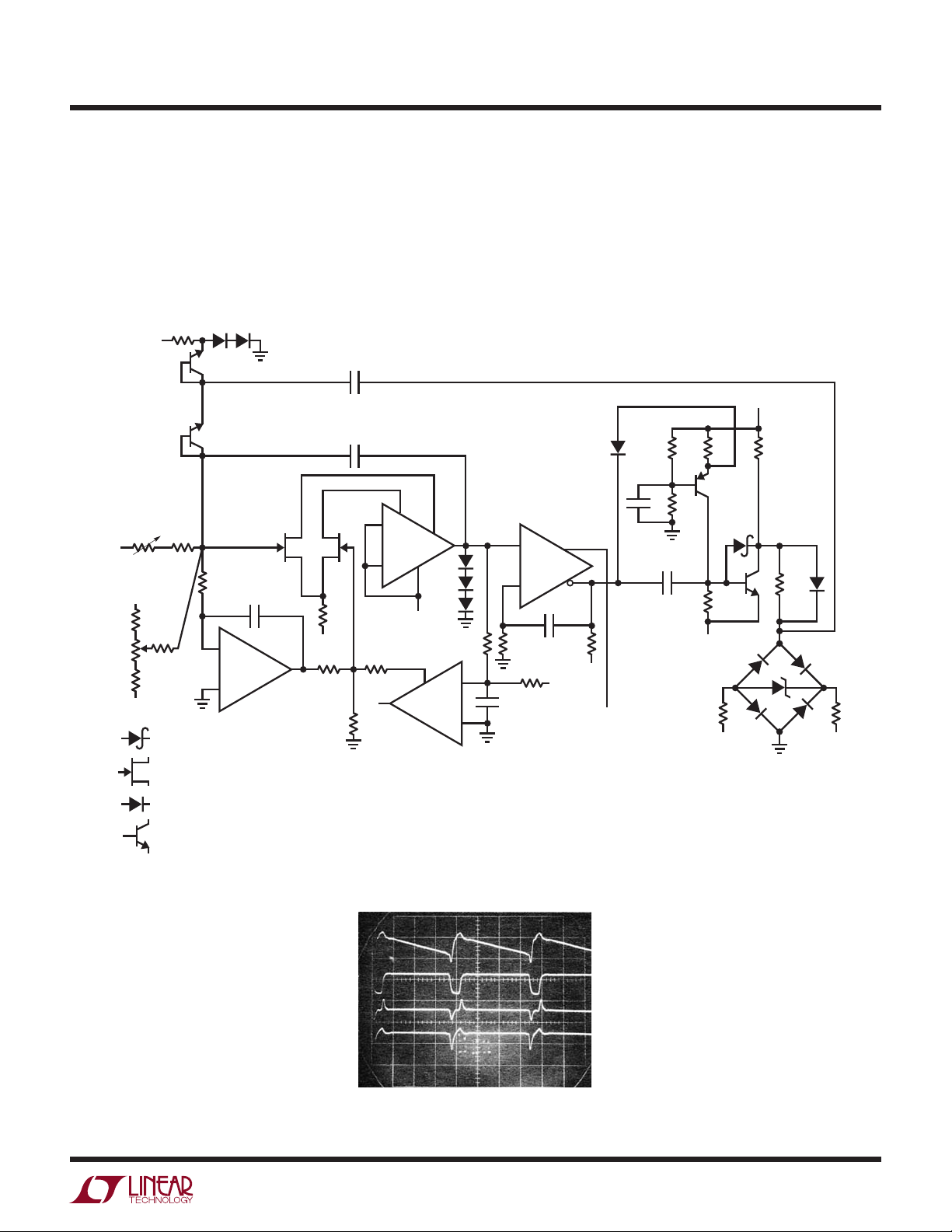
2.5MHz Precision Rectifier/AC Voltmeter
Most precision rectifier circuits rely on operational amplifiers to correct for diode drops. Although this scheme
works well, bandwidth limitations usually restrict these
circuits to operation below 100kHz. Figure 36 shows the
LT1016 in an open-loop, synchronous rectifier configuration which has high accuracy out to 2.5MHz. An input
5V
180430
AC OUTPUT
750
–5V
5V
180
750
2k
100k
+
1
LT1012
DC OUTPUT
TO 1.5V
0V
DC
DC
–
9.1k*
4k*
2k
GAIN
TRIM
AN13 F36
500
SKEW
COMP
820
820
–5V
Figure 36. Fast, Synchronous Rectifier-Based AC/DC Converter
an13f
AN13-21
Page 22

Application Note 13
1MHz sine wave (Trace A, Figure 37) is zero cross detected
by C1. Both of C1’s outputs drive identical level shifters
with fast (delay = 2ns to 3ns), ±5V outputs. These outputs
bias a Schottky switching bridge (Traces B and C are the
switched corners of the bridge). The input signal is fed to
the left-midsection of the bridge. Because C1 drives the
bridge synchronously with the input signal, a half-wave
rectified sine appears at the AC output (Trace D). The
DC RMS value appears at the DC output. The Schottky
bridge gives fast switching and eliminates the charge
pump-through that a FET switch would contribute. This is
evident in Trace E, which is an expanded version of Trace
D. The waveform is clean with the exception of very small
disturbances where bridge switching occurs. To calibrate
this circuit, apply a 1MHz to 2MHz 1Vp-p. Sine wave and
adjust the delay compensation so bridge switching occurs
when the sine crosses zero. This adjustment corrects for
the small delays through the LT1016 and the level shifters. Next, adjust the skew compensation potentiometers
for minimum aberrations in the AC output signal. These
trims slightly shift the phase of the rising output edge
of their respective level shifter. This allows skew in the
complementary bridge drive signals to be kept within 1ns
to 2ns, minimizing output disturbances when switching
occurs. A 100mV sine input will produce a clean output
with a DC output accuracy of better than 0.25%.
10MHz Fiber Optic Receiver
level can cause erroneous results unless the receiver
is carefully designed. The fiber optic receiver shown in
Figure38 will accurately condition a wide range of light
inputs at up to 10MHz data rates. Its digital output features
an adaptive threshold trigger which accommodates varying signal intensities due to component aging and other
causes. An analog output is also available to monitor the
detector output. The optical signal is detected by the PIN
photodiode and amplified by a broadband fed-back stage,
Q1-Q3. A second, similar, stage gives further amplification.
The output of this stage (Q5’s collector) biases a 2-way
peak detector (Q6-Q7). The maximum peak is stored in
Q6’s emitter capacitor, while the minimum excursion is
retained in Q7’s emitter capacitor. The DC value of Q5’s
output signal’s mid-point appears at the junction of the
500pF capacitor and the 22MΩ unit. This point will always
sit midway between the signal’s excursions, regardless of
absolute amplitude. This signal-adaptive voltage is buffered
by the low bias LT1012 to set the trigger voltage at the
LT1016’s positive input. The LT1016’s negative input is
biased directly from Q5’s collector. Figure 39 shows the
results using the test circuit indicated in Figure 38. The
pulse generator’s output is Trace A, while Q5’s collector
(analog output monitor) appears in Trace B. The LT1016
output is Trace C. The wideband amplifier responds within
5ns and rises in 25ns. Note that the LT1016’s output transitions line up with the mid-point of Trace B, in accordance
with the adaptive trigger’s operation.
Reception of high data rate fiber optic data is not easy.
The high speed data and uncertain intensity of the light
A = 5V/DIV
B = 10V/DIV
C = 10V/DIV
D = 2V/DIV
E = 1V/DIV
A, B, C, D HORIZONTAL = 500ns/DIV
E HORIZONTAL = 50ns/DIV (UNCALIBRATED)
Figure 37. Fast AC/DC Converter Operating at 1MHz.
Clean Switching is Due to LT1016’s Speed and
Compensations for Delay and Switching Skew
AN13-22
an13f
Page 23

Application Note 13
TEST CIRCUIT
PULSE
GENERATOR
FIBER OPTIC
330Ω
+
50Ω
–
CABLE
HP5082-4207
HP-HEMT-6000
5V
1pF
10k
Q1
4.7k
Q3
Q2
Q = 2N3866 THIS SECTION
100Ω
1.5k
ANALOG OUT MONITOR LEVEL OUT MONITOR
2.7k2.7k
2pF
4.7k
Q4
1k
10k
Q6
2N3904
22M
–
0.005
500pF
LT1012
+
10k
0.005
22M
Q7
2N3906
SENSITIVITY: 10µW/V OUT (0.5µA = 1µW FLUX)
MINIMUM LIGHT FLUX IN FOR VALID DATA OUT: 2µW
DATA RATE: DC – 10Mb/SEC
–5V
Q5
Figure 38. Fast Fiber Optic Receiver is Immune to Shifts in Operating Point
50
330Ω
1µF
330Ω
–
+
DIGITAL
OUTPUT
LT1016
AN13 F38
A = 5V/DIV
B = 2V/DIV
(INVERTED)
C = 5V/DIV
HORIZONTAL = 50ns/DIV
Figure 39. Fiber Optic Receiver Waveforms
12ns Circuit Breaker
Figure 40 shows a simple circuit which will turn off current in a load 12ns after it exceeds a preset value. This
circuit has been used to protect integrated circuits during
developmental probing and is also useful for protecting
expensive loads during trimming and calibration. It is three
times faster and less complex than previously published
circuits. Under normal conditions the voltage across the
10Ω shunt is smaller than the potential at the LT1016’s
negative input. This keeps Q1 off and Q2 receives bias,
driving the load. When an overload occurs (in this case
via a test circuit, chose output is Trace A, Figure 41), the
current through the 10Ω sense resistor begins to increase
(Trace B, Figure 41). When this current exceeds the preset
value, the LT1016’s outputs (non-inverting output shown
in Trace C) reverse. This provides ideal turn-on drive for
Q1 and it cuts off Q2 (Q2 emitter is Trace D) in 5ns. The
delay from the onset of excessive load current to complete
shutdown is just 13ns. Once the circuit has triggered, the
LT1016 is held in its latched state by feedback from the
non-inverting output. When the load fault has been cleared
the pushbutton can be used to reset the circuit.
an13f
AN13-23
Page 24

Application Note 13
5V
20pF
330
5V
RESET
(NORMALLY CLOSED
PUSHBUTTON)
Q1
2N3866
HP5082-2810
47Ω
330
0.1
15V
3.3Ω
1k
LT1004
1.2V
390Ω
CURRENT
SET
6
–
1k
L
LT1016
+
220Ω
Figure 40. 12ns Circuit Breaker
50MHz Trigger
Counters and other instruments require a trigger circuit.
Designing a fast, stable trigger is not easy, and often entails a considerable amount of discrete circuitry. Figure 42
shows a simple trigger with 100mV sensitivity at 50MHz.
The FETs comprise a simple high speed buffer and the
LT1016 compares the buffer’s output to the potential at the
47µF
+
Q2
2N3866
LOAD
10Ω
AN13 F40
A = 10V/DIV
B = 50mA/DIV
C = 5V/DIV
D = 10V/DIV
HORIZONTAL = 10ns/DIV
Figure 41. Operating Waveforms for the 12ns Circuit
Breaker. Circuit Output (Trace D) Starts to Shut Down
12ns After Output Current (Trace B) Begins to Rise
“trigger level” potentiometer, which may be either polarity.
The 10k resistor provides hysteresis, eliminating “chattering” caused by noisy input signals. Figure 43 shows
the trigger’s response (Trace B) to a 50MHz sine wave
(TraceA). To calibrate this circuit, ground the input and
adjust the “input zero” control for 0V at Q2’s drain terminal.
5V
2N5486INPUT
50Ω
50Ω
2N5486
100Ω
INPUT ZERO
–5V
MOUNT FETs TOGETHER
100mV SENSITIVITY AT 50MHz
t
TYPICALLY 12ns
DELAY
Figure 42. 50MHz Trigger Figure 43. Trigger Responding to a 50MHz Sine Input
0.1
+
LT1016
–
10k
5V
+
–
–5V
OUTPUT
1k
2.5k
TRIGGER
LEVEL
1k
AN13 F42
A = 100mV/DIV
B = 2V/DIV
HORIZONTAL = 10ns/DIV
an13f
AN13-24
Page 25

REFERENCES
Application Note 13
Dendinger, S., “One IC Makes Precision Sample and Hold,”
EDN, May 20, 1977.
Pease, R. A., “Amplitude to Frequency Converter,” U.S.
Patent #3,746,968, Filed September, 1972.
Hewlett-Packard Application Note #915, “Threshold
Detection of Visible and Infra-Red Radiation with PIN
Photodiodes,”
Williams, J., “A Few Proven Techniques Ease Sine-WaveGenerator Design,” EDN, November 20, 1980, page 143.
APPENDIX A
About Bypass Capacitors
Bypass capacitors are used to maintain low power supply
impedance at the point of load. Parasitic resistance and
inductance in supply lines mean that the power supply
impedance can be quite high. As frequency goes up, the
inductive parasitic becomes particularly troublesome. Even
if these parasitic terms did not exist, or if local regulation
is used, bypassing is still necessary because no power
supply or regulator has zero output impedance at 100MHz.
What type of bypass capacitor to use is determined by the
application, frequency domain of the circuit, cost, board
space and many other considerations. Some useful generalizations can be made.
Williams, J., “Simple Techniques Fine-Tune Sample-Hold
Performance,” Electronic Design, November 12, 1981,
page 235.
Baker, R. H., “Boosting Transistor Switching Speed,”
Electronics, Vol. 30, 1957, pages 190 to 193.
Bunze, V., “Matching Oscilloscope and Probe for Better
Measurements,’ Electronics, March 1, 1973, pages 88 to 93.
Bypass capacitors must often be large values so they can
absorb long transients, necessitating electrolytic types
which have large series R and L.
∞
•
•
•
•
•
DIELECTRIC
ABSORPTION
TERMS
R R
L L
All capacitors contain parasitic terms, some of which
appear in Figure A1. In bypass applications, leakage and
dielectric absorption are second order terms but series R
and L are not. These latter terms limit the capacitor’s ability
to damp transients and maintain low supply impedance.
LEAKAGE
CAPACITOR USER
TERMINALS
Figure A1. Parasitic Terms of a Capacitor
AN13 FA1
AN13-25
an13f
Page 26

Application Note 13
Different types of electrolytics and electrolytic-non-polar
combinations have markedly different characteristics.
Which type(s) to use is a matter of passionate debate in
some circles and the test circuit (Figure A2) and accompanying photos are useful. The photos show the response
of five bypassing methods to the transient generated by
the test circuit. Figure A3 shows an unbypassed line which
sags and ripples badly at large amplitudes. FigureA4 uses
an aluminum 10µF electrolytic to considerably cut the
“B” WAVEFORM“A” WAVEFORM 5V
0V
±2.5V
FROM PULSE
GENERATOR
100Ω
CARBON
1k
2N2369 TEST BYPASS
50Ω
Figure A2. Bypass Capacitor Test Circuit
50Ω
CARBON
AN13 FA2
disturbance, but there is still plenty of potential trouble.
A tantalum 10µF unit offers cleaner response in A5 and
the 10µF aluminum combined with a 0.01µF ceramic
type is even better in A6. Combining electrolytics with
non-polarized capacitors is a popular way to get good
response but beware of picking the wrong duo. The right
(wrong) combination of supply line parasitics and paralleled dissimilar capacitors can produce a resonant, ringing
response, as in A7. Caveat!
A = 5V/DIV
B = 1V/DIV
HORIZONTAL = 100ns/DIV
Figure A3. Response of Unbypassed Line
A = 5V/DIV
B = 0.1V/DIV
HORIZONTAL = 100ns/DIV
Figure A4. Response of 10µF Aluminum Capacitor
A = 5V/DIV
B = 0.1V/DIV
HORIZONTAL = 100ns/DIV
A = 5V/DIV
B = 0.1V/DIV
HORIZONTAL = 100ns/DIV
Figure A5. Response of 10µF Tantalum Capacitor
A = 5V/DIV
B = 0.1V/DIV
HORIZONTAL = 100ns/DIV
Figure A6. Response of 10µF Aluminum Paralleled
by 0.01µF Ceramic
AN13-26
Figure A7. Some Paralleled Combinations Can Ring.
Try Before Specifying!
an13f
Page 27

APPENDIX B
About Probes and Oscilloscopes
The oscilloscope-probe combination used in high speed
work is the most important equipment decision the designer must make. Ideally, the oscilloscope should have
at least 150MHz bandwidth for work with the LT1016,
but slower instruments are acceptable if their limitations
are well understood. Be aware of your scope’s behavior
with respect to input impedance, noise, overdrive recovery, sweep nonlinearity, triggering, channel-to-channel
feedthrough and other characteristics.
Probes are the most overlooked cause of oscilloscope
mismeasurement. All probes have some effect on the
point they are measuring. The most obvious is input
resistance, but input capacitance usually dominates in a
high speed measurement. Much time can be lost chasing
circuit events which are actually due to improperly selected
or applied probes. An 8pF probe looking at a 1kΩ source
impedance will form an 8ns lag—close to the LT1016’s
response time! Low impedance probes, designed for 50Ω
inputs, (with 500Ω to 1kΩ resistance) usually have input
capacitance of 1pF or 2pF. They are a very good choice
if you can stand the low resistance. FET probes maintain
high input resistance and keep capacitance at the 1 pF level
but have substantially more delay than passive probes.
FET probes also have limitations on input common mode
range which must be adhered to or serious measurement
errors will result. Contrary to popular belief, FET probes
do not have extremely high input resistance—some types
are as low as 100kΩ.
Current probes are useful and convenient. The passive
transformer-based types are fast and have less delay than
the Hall effect-based versions. The Hall types, however,
respond at DC and low frequency and the transformer
types typically roll off around 100Hz to 1kHz. Both types
have saturation limitations which, when exceeded, cause
odd results on the CRT which will confuse the unwary.
Application Note 13
When using different probes remember that they all have
different delay times, meaning that apparent timing errors
will occur on the CRT. Know what the individual probe delays
are and account for them in interpreting the CRT display.
By far the greatest source of error in probe use is
grounding. Poor probe grounding can cause ripples and
discontinuities in the waveform observed. In some cases
the choice and placement of a probe’s ground strap will
affect waveforms on another channel. In the worst case,
connecting the probe’s ground wire will virtually disable
the circuit being measured. The cause of these problems
is due to parasitic inductance in the probe’s ground connection. In most oscilloscope measurements this is not
a problem, but at nanosecond speeds it becomes critical.
Fast probes are always supplied with a variety of spring
clips and accessories designed to aid in making the lowest
possible inductive connection to ground. Most of these
attachments assume a ground plane is in use, which it
should be. Always try to make the shortest possible connection to ground—anything longer than one inch may
cause trouble.
The simple network of Figure B1 shows just how easy it is
for poorly chosen or used probes to cause bad results. A
9pF input capacitance probe with a four inch long ground
strap monitors the output (Trace B, Figure B2). Although
the input (Trace A) is clean, the output contains ringing.
Using the same probe with a one-fourth inch spring
tip ground connection accessory seemingly cleans up
everything (Figure B3). However, substituting a 1pF FET
probe (Figure B4) reveals a 50% output amplitude error in
measurement B3! The FET probe’s low input capacitance
allows a more accurate version of circuit action. The FET
probe does, however, contribute its own form of error. Note
that the probe’s response is tardy by 5ns due to delay in
its active circuitry. Hence, separate measurements with
each probe are required to determine amplitude and timing
parameters of the output.
an13f
AN13-27
Page 28

Application Note 13
A final form of probe is the human finger. Probing the
circuit with a finger can accentuate desired or undesired
effects, giving clues that may be useful. The finger can be
used to introduce stray capacitance to a suspected circuit
node while observing results on the CRT. Two fingers,
lightly moistened, can be used to provide an experimental
resistance path. Some high speed engineers are particularly
adept at these techniques and can estimate the capacitive
and resistive effects created with surprising accuracy.
Examples of the probes discussed, along with different
forms of grounding implements, are shown in Figure B5.
Probes A, B, E, and F are standard types equipped with
various forms of low impedance grounding attachments.
50Ω
Figure B1. Probe Test Circuit
The conventional ground lead used on G is more convenient
to work with but will cause ringing and other effects at
high frequencies, rendering it useless. H has a very short
ground lead. This is better, but can still cause trouble at
high speeds. D is a FET probe. The active circuitry in the
probe and a very short ground connector ensure low
parasitic capacitance and inductance. C is a separated FET
probe attenuator head. Such heads allow the probe to be
used at higher voltage levels (e.g., ±10V or ±100V). The
miniature coaxial connector shown can be mounted on the
circuit board and the probe mated with it. This technique
provides the lowest possible parasitic inductance in the
ground path and is especially recommended.
10pF
OUTPUTPULSE INPUT
1k
AN13 FB1
A = 5V/DIV
B = 1V/DIV
HORIZONTAL = 10ns/DIV
Figure B2. Test Circuit Output with 9pF Probe and
4 Inch Ground Strap
A = 5V/DIV
B = 1V/DIV
HORIZONTAL = 10ns/DIV
A = 5V/DIV
B = 1V/DIV
HORIZONTAL = 10ns/DIV
Figure B3. Test Circuit Output with 9pF Probe and
0.25 Inch Ground Strap
A B C D E F
J
I H G
Figure B4. Test Circuit Output with FET Probe Figure B5. Various Probe-Ground Strap Configurations
AN13-28
an13f
Page 29

Application Note 13
I is a current probe. A ground connection is not usually
required. However, at high speeds the ground connection may result in a cleaner CRT presentation. Because
no current flows in the ground lead of these probes, a
long strap is usually permissible. J is typical of the finger
probes described in the text. Note the ground strap on
the third finger.
The low inductance ground connectors shown are available from probe manufacturers and are always supplied
with good quality, high frequency probes. Because most
oscilloscope measurements do not require them, they
invariably become lost. There is no substitute for these
devices when they are needed, so it is prudent to take care
of them. This is especially applicable to the ground strap
on the finger probe.
APPENDIX C
About Ground Planes
Many times in high frequency circuit layout the term
“ground plane” is used, most often as a mystical and illdefined cure to spurious circuit operation. In fact, there is
little mystery to the usefulness and operation of ground
planes, and like many phenomena, their fundamental
operational principle is surprisingly simple.
Ground planes are primarily useful for minimizing circuit
inductance. They do this by utilizing basic magnetic theory.
Current flowing in a wire produces an associated magnetic
field. The field’s strength is proportional to the current
and inversely related to the distance from the conductor.
Thus, we can visualize a wire carrying current (Figure C1)
surrounded by radii of magnetic field. The unbounded
field becomes smaller with distance. A wire’s inductance
is defined as the energy stored in the field set up by the
wire’s current. To compute the wire’s inductance requires
integrating the field over the wire’s length and the total
radial area of the field. This implies integrating on the
radius from R = R
to infinity, a very large number. How-
W
ever, consider the case where we have two wires in space
carrying the same current in either direction (FigureC2).
The fields produced cancel.
In this case, the inductance is much smaller than in the
sample wire case and can be made arbitrarily small by reducing the distance between the two wires. This reduction
of inductance between current carrying conductors is the
underlying reason for ground planes. In a normal circuit,
the path current takes from the signal source, through its
conductor and back to ground includes a large loop area.
This produces a large inductance for this conductor which
can cause ringing due to LRC effects. It is worth noting
that 10nH at 100MHz has an impedance of 6Ω. At 10mA
a 60mV drop results.
A ground plane provides a return path directly under the
signal carrying conductor through which return current
can flow. The conductor’s small physical separation means
the inductance is low. Return current has a direct path to
ground, regardless of the number of branches associated
with the conductor. Currents will always flow through the
return path of lowest impedance. In a properly designed
ground plane this path is directly under the signal conductor.
In a practical circuit it is desirable to “ground plane” one
whole side of the PC card (usually the component side for
wave solder considerations) and run the signal conductors
on the other side. This will give a low inductance path for
all the return currents.
Aside from minimizing parasitic inductance, ground planes
have additional benefits. Their flat surface minimizes resistive losses due to AC “skin effect” (AC currents travel along
a conductor’s surface). Additionally, they aid the circuit’s
high frequency stability by referring stray capacitances
to ground.
I
D
I
Figure C1. Single Wire Case Figure C2. Two Wire Case
FIELD RADII
I
an13f
AN13-29
Page 30

Application Note 13
Some practical hints for ground planes are:
1. Ground plane as much area as possible on the component side of the board, especially under traces that operate
at high frequency.
2. Mount components that conduct substantial fast rise
currents (termination resistors, ICs, transistors, decoupling
capacitors) as close to the board as possible.
3. Where common ground potential is important (i.e., at
comparator inputs), try to single point the critical components into the ground plane to avoid voltage drops.
For example, in Figure C3’s common A/D circuit, good
practice would dictate that grounds 2, 3, 4 and 6 be as
close to single point as possible.
R2
R1
V
+V
REF
6
DAC
D1
2
1
Fast, large currents must flow through R1, R2, D1 and
D2 during the DAC settle time. Therefore, D1, D2, R1
and R2 should be mounted close to the ground plane
to minimize their inductance. R3 and C1 don’t carry any
current, so their inductance is less important; they could
be vertically inserted to save space and to allow point 4 to
be single point common with 2, 3 and 6. In critical circuits
the designer must often trade off the beneficial effects of
lowered inductance versus the loss of single point ground.
4. Keep trace length short. Inductance varies directly with
length and no ground plane will achieve perfect cancellation.
V
IN
+
D2
3
C1 R3
–
LT1016
AN13 FC2
Figure C3. Typical Grounding Scheme
APPENDIX D
Measuring Equipment Response
The 10ns response time of the LT1016 and the circuitry it
is used in will challenge the best test equipment. Many of
the measurements made utilize equipment near the limit of
its capabilities. It is a good idea to verify parameters such
as probe and scope rise time and differences in delays
10k
50V
LT317AH
1000pF
40V
270
9k 10k
40V
–
LM301A*
+
40V
PULSE GENERATOR
50kHz
10k
10k
*SELECT ON CURVE TRACER FOR BREAKDOWN OF >45V
**ADJUST FOR FASTEST OUTPUT RISE TIME
4 5
between probes and even oscilloscope channels. To do
this, a source of very fast, clean pulses is necessary. The
circuit shown in Figure D1 uses a tunnel diode to generate
a pulse with a rise time well under 1ns.
RISE TIME
10k**
1k
GERMANIUM
POWER
DEVICES
ANDOVER, MA.
TD-263B
AN13 FD1
OUTPUT
50kHz
100mV
50Ω
<1ns RISE TIME (TYP 300ps)
AN13-30
Figure D1. Tunnel Diode-Based 1ns Rise Time Pulse Generator
an13f
Page 31

Application Note 13
Figure C2 shows that the pulse is also very clean, with no
attendant ringing or noise. In this photo the pulse is used
to check a probe-scope combination with a specified 1.4ns
rise time. The display shows that the equipment is being
VERTICAL = 20mV/DIV
HORIZONTAL = 10ns/DIV
Figure D2. Figure D1’s Output Monitored on a 275MHz Oscilloscope
APPENDIX E
About Level Shifts
properly used and is in specification. Using the tunnel
diode generator to perform tests such as this can save
countless hours pursuing “circuit problems,” which in
reality are caused by misapplied or out of spec equipment.
The TTL output of the LT1016 will interface with many
circuits directly. Many applications, however, require some
form of level shifting of the output swing. With LT1016based circuits this is not trivial because it is desirable to
maintain very low delay in the level shifting stage. When
designing level shifters, keep in mind that the TTL output of
the LT1016 is a sink-source pair (Figure E1) with good ability to drive capacitance (such as feedforward capacitors).
+V
OUTPUT = 0 → +V (TYPICALLY 3V TO 4V)
AN13 FE1
LT1016 OUTPUT
Figure E1 Figure E2
Figure E2 shows a non-inverting voltage gain stage with a
15V output. When the LT1016 switches, the base-emitter
voltages at the 2N2369 reverse, causing it to switch very
quickly. The 2N3866 emitter-follower gives a low impedance
output and the Schottky diode aids current sink capability.
15V
1k
+
LT1016
–
NONINVERTING VOLTAGE GAIN
t
= 4ns
RISE
= 5ns
t
FALL
2N2369
1k
12pF
HP5082-2810
2N3866
OUT
1k
AN13 FE2
Information furnished by Linear Technology Corporation is believed to be accurate and reliable.
However, no responsibility is assumed for its use. Linear Technology Corporation makes no representation that the interconnection of its circuits as described herein will not infringe on existing patent rights.
an13f
AN13-31
Page 32

Application Note 13
Figure E3 is a very versatile stage. It features a bipolar
swing which may be programmed by varying the output
transistor’s supplies. This 3ns delay stage is ideal for driving
FET switch gates. Q1, a gated current source, switches the
Baker-clamped output transistor, Q2. The heavy feedforward capacitor from the LT1016 is the key to low delay,
providing Q2’s base with nearly ideal drive. This capacitor
loads the LT1016’s output transition (TraceA, Figure E5),
but Q2’s switching is clean (Trace B, Figure E5) with 3ns
delay on the rise and fall of the pulse.
5V
+
INPUT
LT1016
1N4148
–
1000pF
INVERTING VOLTAGE GAIN—BIPOLAR SWING
= 3ns
t
RISE
= 3ns
t
FALL
4.7k 430Ω
0.1 820Ω
Q1
2N2907
820Ω
5V (TYP)
–10V (TYP)
Figure E4 is similar to E2 except that a sink transistor has
replaced the Schottky diode. The two emitter-followers
drive a power MOSFET which switches 1A at 15V. Most of
the 7ns to 9ns delay in this stage occurs in the MOSFET
and the 2N2369.
When designing level shifters, remember to use transistors
with fast switching times and high f
results shown, switching times in the ns range and f
’s. To get the kind of
T
T
’s
approaching 1GHz are required.
330Ω
OUTPUT
Q2
2N2369
HP5082-2810
AN13 FE3
OUTPUT TRANSISTOR SUPPLIES
5V
(SHOWN IN HEAVY LINES)
CAN BE REFERENCED ANYWHERE BETWEEN
–10V
15V AND –15V
+
LT1016
–
NONINVERTING VOLTAGE GAIN
t
= 7ns
RISE
= 9ns
t
FALL
2N2369
1k
Figure E3
15V
A = 2V/DIV
B = 10V/DIV
(INVERTED)
HORIZONTAL = 5ns/DIV
12pF
1k
2N3866
2N5160
R
L
POWER FET
1k
AN13 FE4
Figure E4 Figure E5. Figure E3’s Waveforms
AN13-32
Linear Technology Corporation
1630 McCarthy Blvd., Milpitas, CA 95035-7417
(408) 432-1900 ● FAX: (408) 434-0507
●
www.linear.com
an13f
IM/GP 485 10K • PRINTED IN USA
LINEAR TECHNOLOGY CORPORATION 1985
 Loading...
Loading...