

Page 1

Supplementary Operating Instructions
NORDAC SK 700E Frequency Inverter
With Positioning Card (Special Extension Module)
SK XU1-POS
SK 700E with optional parameter box
T. Nr. 0603 7182
Getriebebau NORD
GmbH & Co. KG
... NORD Gear
BU 0710 GB
Last Update: February 2002
Page 2

2 BU 0710 GB
Page 3

NORDAC SK 700E Frequency Inverter
Instructions for the safety and use of
variable frequency converters
(as provided in the 73/23/EEC low-voltage directive)
1. General
Depending on their type of enclosure, variable frequency
inverter may have live, bare, in some cases even moving or
rotating parts as well as hot surfaces during operation.
Inadmissibly removing the required covers, improper use,
incorrect installation or handling can be dangerous and may
lead to serious damage to persons or to property.
See the documentation for more detailed information.
Any transport, installation, starting-up or maintenance work
shall be performed by properly qualified, skilled and
competent personnel (IEC 364 or CENELEC HD 384
respectively or DIN VDE 0100 and IEC 664 or DIN VDE
0110 and national accident prevention regulations to be
observed).
Qualified, skilled personnel as mentioned in these basic
safety instructions is understood to refer to persons who are
familiar with the installation, assembly, setting-up and
operation of the product and who have the qualifications
required for the job of which they are in charge.
2. Intended use
Variable frequency inverter are components designed to be
integrated into electrical installations or machinery.
If the converters are installed in machines, they must not be
put into operation (in other words, operation as intended by
the manufacturer must not begin) until it has been
established that the machine in question actually meets the
requirements mentioned in the EC directive 89/392/EEC
(Directive For Machines); EN 60204 is to be observed.
The device must not be put into operation (i.e. operation as
intended by the manufacturer must not be started) unless
the stipulations of the EMC directive (89/336/EEC) are
fulfilled.
Variable frequency inverter meet the requirements stated in
the low-voltage directive 73/23/EEC. Likewise the accorded
standards of the series prEN 50178/DIN VDE 0160 in
conjunction with EN 60439-1/ VDE 0660 Part 500 and EN
60146/ VDE 0558 are applied to the variable frequency
inverter.
Refer to the rating plate and the documentation for details
on technical data and connecting requirements and do not
fail to observe them and to follow instructions.
3. Transport, storage
Follow the instructions for transport, storage, and proper
handling.
Ensure climatic conditions as specified in prEN 50178.
4. Installation
The devices must be installed and cooled as directed in the
relevant documentation.
The variable frequency inverter must be protected against
inadmissible stress. Special care should be taken not to bend
components or to change the spacing of insulation during transport
and handling. Do not touch electronic components and contacts.
Variable frequency inverter contain electrostatically sensitive
components which are easily damaged through improper handling.
Electrical components must not be damaged or destroyed
mechanically (potential health risks!).
5. Electrical connection
Follow the applicable national accident prevention rules (e.g. VBG
4) when working on variable frequency inverter while they are live.
Electrical installation is to be performed in accordance with
applicable rules and regulations (e.g. regarding conductor cross
sections, fusing, PE connection). Apart from these, more
instructions may be mentioned in the documentation.
Recommendations for meeting EMC standards in installation - for
instance with regard to screening, earthing, filter arrangement and
the routing of lines - are found in the converter documentation. CEmarked variable frequency inverter are always subject to such
instructions as well. It is the responsibility of the machine or plant
manufacturer to ensure that the limit values stipulated by EMC
legislation are duly met.
6. Operation
It may be necessary to provide facilities in which variable
frequency inverter are installed with additional monitoring and
protecting devices to satisfy the applicable safety regulations, e.g.
the law on technical working materials, accident prevention
regulations etc. Modifications of the variable frequency inverter by
means of the operating software are allowed.
Do not touch live parts of the device or power terminals right after
the converter has been disconnected from the supply voltage as
capacitors may still be charged. The information plates on the
driving current converter will give you precise details on the
subject.
Keep all covers closed during operation.
7. Service and maintenance
As described in the manufacturer’s documentation.
Do keep these Safety Instructions for future reference!
Please note: Validity of these Supplementary Operating Instructions is contingent on the com-
plementary use of the basic Operating Instructions for the NORDAC SK 700E frequency inverter which are also enclosed with the unit delivered.
Page 4

4 BU 0710 GB
Page 5

Table of contents
1 GENERAL ............................................................................................................................ 6
2 INSTALLATION PROCEDURE ........................................................................................... 7
2.1 Safety and installation instructions ......................................................................................................7
2.1.1 How to install Posicon special extension modules ............................................................................................... 9
2.2 Posicon I/O connection ........................................................................................................................11
2.3 Incremental encoder connection ........................................................................................................12
2.4 Absolute encoder connection .............................................................................................................12
3 FUNCTIONAL CHARACTERISTICS................................................................................. 13
3.1 Introduction ...........................................................................................................................................13
3.2 Actual position recognition .................................................................................................................13
3.2.1 Position recognition with an incremental encoder .............................................................................................. 13
3.2.2 Position recognition with an absolute value encoder.......................................................................................... 15
3.2.3 Encoder monitoring ............................................................................................................................................ 15
3.2.4 Positioning with single-turn absolute value encoders and incremental shaft encoders used in absolute mode . 16
3.3 Setpoint setting.....................................................................................................................................17
3.3.1 Position array – Absolute setpoint position via digital inputs .............................................................................. 17
3.3.2 Position increment array – Relative setpoint position via digital inputs .............................................................. 17
3.3.3 16-bit bus mode ................................................................................................................................................. 17
3.3.4 32-bit bus mode ................................................................................................................................................. 17
3.3.5 Position array – Bus transmission of absolute setpoint position......................................................................... 17
3.3.6 Position increment array – Bus transmission of absolute setpoint position ........................................................ 18
3.4 Teach-in programming.........................................................................................................................18
3.5 Modes of position control (P600) ........................................................................................................18
3.6 Position control.....................................................................................................................................19
3.7 Relay signals .........................................................................................................................................20
4 POSITIONING PARAMETERS.......................................................................................... 21
5 SYSTEM START-UP.......................................................................................................... 26
6 FAULT CLEARANCE ........................................................................................................ 27
6.1 Error messages.....................................................................................................................................27
6.2 Table of errors and possible causes ..................................................................................................28
7 BUSINESS ESTABLISHMENTS & SALES OFFICES IN GERMANY ............................. 30
BU 0710 GB 5
Page 6

NORDAC SK 700E manual Posicon special extension
1 General
NORDAC vector frequency inverters are voltage source d.c. link inverters with microprocessor electronics
designed to control the speed of three-phase motors.
Providing an incremental encoder on the motor and/or an absolute encoder on the output shaft along with
using the optional SK_XU1_POS Posicon positioning card will enhance the standard components so as to
constitute a drive system capable of performing positioning tasks in a highly precise manner.
• 252 positions can be programmed to be approached by the unit controlled
• Position control in the destination window; the unit controlled will retain the desired position
even with substantial fluctuations of the load.
• Distance calculation ensures that the driven assembly is moved into the destination position
accurately and within the shortest possible time
• Control options not only provide for setting positions but also for pre-setting the step widths
required for moving from one position to the next (position increments)
• Also possible: transmission of setpoint positions via a field bus interface.
Designed to be plugged into the control board, the add-on positioning card fits into the standard housing of the
frequency inverter so that the overall size of the device is not increased.
The positioning card is equipped with a processor of its own which will determine the speed setpoint the
inverter will have to ensure.
The parameters which are required for distance calculation are inserted into the existing inverter menu
structure as an additional menu group.
The position setpoints can be applied to the digital inputs which are additionally provided on the positioning
card, or transmitted via the USS protocol or another field bus system respectively.
By switching from one parameter set to another, the operator may quit speed control in order to access
distance calculation or position control, or vice versa.
6 BU 0710 GB
Page 7
2 Installation procedure
2 Installation procedure
2.1 Safety and installation instructions
NORDAC SK 700E frequency inverters are operational equipment for use in industrial power plant. That is
why touching them may cause, due to the voltages at which they are operated, serious injuries or even
death.
• Only skilled personnel qualified in electrotechnical professions is allowed to perform
installation or any other work on the devices provided that these have been previously
disconnected from supply. The personnel involved must have access to the operating
instructions any time and observe them conscientiously without exception.
• Local regulations governing the installation of electric plant as well as any regulations for
accident prevention have to be followed.
• The device continues to be dangerously live for up to 5 minutes after its disconnection from
the mains. Accordingly the device must not be opened or either the covers or the control
panel be detached until 5 minutes after it has been disconnected from supply. Reattach all
covers before switching the mains voltage on again.
• Even when the motor has stopped (e.g. following electronic disable, jamming of the drive, or
a short circuit of the output terminals), the supply terminals, the motor terminals, and the
terminals for the braking resistor can be dangerously live. Even if the motor is not running it
can by no means be assumed that it is also electrically isolated from the mains.
• Caution, parts of the control board and especially the female connector for the detachable
equipment boxes are dangerously live, too. No mains potential is applied to the control
terminals, however.
• Caution, certain setting configurations may cause the inverter to start up automatically when
it is connected to the mains.
• The printed circuit boards carry highly sensitive MOS semiconductor components for which
static electricity can be particularly harmful. That is why you should avoid to touch the
conductive tracks or electronic components with your hands or with metallic objects. When
connecting the cables, use insulated screw drivers to manipulate the screws of the terminal
strips.
• The inverter is intended for permanent connection only and must not be operated without
having been effectively earthed as stipulated by the local regulations for high leakage
currents (> 3.5 mA). German VDE 0160 demands that either a second earth conductor be
laid or that the earth conductor cross section be 10 mm
• If to conform with local regulations the leakage current must not contain any proportion of
direct current at all, conventional fault-current circuit breakers alone will not afford
sufficient protection where three-phase frequency inverters are concerned. The construction
of standard fault-current circuit breakers is supposed to meet the new VDE 0664
requirements.
• NORDAC SK 700E frequency inverters are maintenance-free provided that they are
operated according to instructions. In a dusty environment the cooling surfaces must be
cleaned with compressed air at regular intervals.
CAUTION! DANGER!
The power section may still be live up to 5 minutes after disconnection from the mains.
2
minimum.
Inverter terminals, motor supply cables, and motor terminals may be live, too!
Touching exposed or unconnected terminals, cables, or parts of the device may lead to
serious injuries or even death!
BU 0710 GB 7
Page 8

NORDAC SK 700E manual Posicon special extension
CAUTION
• Ensure that neither children nor the general public will have access to the device or a
chance to manipulate it!
• The device must not be used for any purpose other than the one intended by the
manufacturer. Unauthorized modifications and the use of replacement parts and
attachments which are not sold or recommended by the manufacturer, may cause fire,
electric shock, and injuries.
• Keep this Manual where it will be accessible to any person involved in using the device
or hand it to him/her on your own accord!
8 BU 0710 GB
Page 9

2.1.1 How to install Posicon special extension modules
IMPORTANT
Only properly qualified personnel who can be assumed to be aware of and adhere to the
safety and warning instructions both generally applicable and contained in this document
should be allowed to perform installation work.
2 Installation procedure
1. Switch off mains voltage, wait a few
minutes as directed.
2. Loosen the 2 screws by which the
cover grille is fixed to the connection
area, remove it, and wedge the device
cover out of its slots or simply pull it
off.
3. Move the locking pin to position
"open“.
4. Push the Posicon special extension
board into the lower guide rail exerting
a little pressure until it snaps in. This
may be easier when you take out the
customer interface first and reinstall it
after you have fitted the Posicon
special extension.
5. Set the locking pin to its "closed"
position.
6. Release the connection plug and pull it
off. Make the connections as required.
Then fit the pins again, and make sure
that they lock.
Locking pin
Technical unit
Customer interface
Special extension
7. Reattach all covers.
OPEN
CLOSED
Locked
Released
BU 0710 GB 9
Page 10

NORDAC SK 700E manual Posicon special extension
How to remove the special extension
module :
1. Switch off the mains voltage, wait a few
minutes as directed.
2. Loosen the 2 screws which hold down the
cover grille of the connection area, remove
it, and wedge the device cover out of its
slots, or simply pull it off.
3. Set the locking pin to the "open" position.
4. Use a screwdriver to unlatch the special
extension module (as shown in the figure to
the right) and pull it out completely with your
hand. It may be more convenient to
temporarily remove the customer interface.
5. If you have done so, fit it back into the inverter again.
6. Set the locking pin to
the "closed" position.
7. Reattach all covers.
Customer interface
Special extension
Customer interface
Special extension
10 BU 0710 GB
Page 11

2.2 Posicon I/O connection
The Posicon I/O special extension module (also referred to as XU,
EXtension Unit) is a system of positioning control for integration
into the frequency inverter. The positions which have been
programmed in advance will be exactly and dynamically
appproached on the basis of distance calculation.
Positions are captured by means of an incremental encoder and/or
an absolute value encoder.
The encoders may be installed either on the motor or on the load.
Step-up or step-down ratios can be adjusted at discretion.
Maximum connection cross section of the control lines:
Connector Functions Maximum cross section
X10.1 Output relay 1.0 mm
X10.2 Digital inputs 1.0 mm
X10.3 SSI input 1.0 mm
X10.4 Incremental encoder input 1.0 mm
2
2
2
2
2 Installation procedure
Floating contact or PLC output:
7.5 ... 33V
Absolute value encoder input:
SSI, 24 bits
Incremental encoder input:
TTL, RS 422, 250kHz max.
500 – 5000 pulses/rev.
05 REL3.1
06 REL3.2
07 REL4.1
08 REL4.2
27 DIG IN 7
28 DIG IN 8
29 DIG IN 9
30 DIG IN 10
31 DIG IN 11
32 DIG IN 12
42 VO +15V
40 GND /0V
63 SSI1 CLK+
64 SSI1 CLK65 SSI1 DAT+
66 SSI1 DAT-
41 VO +5V
40 GND /0V
51 ENC1 A+
52 ENC1 A53 ENC1 B+
54 ENC1 B55 ENC1 N+
56 ENC1 N-
X10.1
X10.2
Digital inputs:
Voltage supply:
15V, ∑ 300mA max.
Output relay:
max. 2,0A
28V DC / 230V AC
DIG IN 7 to 12
for position setting
X10.3
X10.4
Voltage supply:
5V, ∑ 300mA max.
PLEASE NOTE: All of the control voltages are related to the same reference potential!
The total allowable current rating of all individual power sources put together will be = 300mA max.
BU 0710 GB 11
Page 12

NORDAC SK 700E manual Posicon special extension
2.3 Incremental encoder connection
Input for an incremental encoder with two tracks and a zero track, with TTL-compatible signals for drivers
according to EIA RS 422. Maximum current input to the incremental encoder must not exceed 250mA. Supply
voltage for the encoder is 5V.
The number of graduation marks per revolution may amount to between 500 and 5000 increments. It is set in
the "positioning" menu group which is accessed through parameter 606. If very long cables are used, or if the
motor speed exceeds 1500 1/min, the encoder should not have more than 2048 graduation lines per revolution.
With more than average cable lengths the cross sectional area must be large enough to ensure that voltage
won’t drop too much from one end of the cable to the other. This is especially important with regard to the
supply cables where the cross section can be enlarged for instance by connecting several wires in parallel.
Alternatively incremental encoders with a higher supply voltage requirement could be used. If the power
required to operate the incremental encoder does not exceed a range of 10 to 30 volts, the internal 15V
source will be sufficient (X10.2 terminal 42).
The screen of the encoder cable is connected to the screen angle using the PE clamps which are enclosed
with the basic unit.
Function Colour
(with incremental encoder ERN 420)
Input terminals Posicon
special extension
SK XU1-POS
5 V supply +5V brown / green
0 V supply DGND white / green
Track A A+ brown
Track A inverse A- green
Track B B+ grey
Track B inverse B- pink
Track 0 ZERO+ red
Track 0 inverse ZERO- black
X10.4.41 VO +5V
X10.3.40 GND /0V
X10.4.51 ENC1 A+
X10.4.52 ENC1 A-
X10.4.53 ENC1 B+
X10.4.54 ENC1 B-
X10.4.55 ENC1 N+
X10.4.56 ENC1 N-
2.4 Absolute encoder connection
Input for an absolute encoder with ‘Gray Code’ and SSI interface. Signals are TTL-compatible in accordance
with EIA RS 422. The inverter will provide the encoder with a supply voltage of 15V. The resolution per
revolution, the maximum number of revolutions or alternatively the length of the transmitted word (8 – 24 bits)
can be set in parameter P605.
The absolute encoder should be installed on the shaft so that the scale zero of the encoder is in the correct
position. The mark treated as zero point by the inverter can be set by defining an offset value.
Multiplication and reduction parameters allow for a transmission ratio to be ensured between motor and
absolute encoder.
The sense of rotation of motor and absolute encoder need not necessarily be the same. If the sense of
rotation is different, a negative transmission ratio must be set.
With the 100kHz clock frequency used, cable lengths of up to 80m are allowed. The cables should be twistedpair and screened.
Absolute encoders may include break-of-wire checking provided that an extra voltage monitoring bit has been
assigned for that purpose.
12 BU 0710 GB
Page 13

3 Functional characteristics
3 Functional characteristics
3.1 Introduction
The Posicon positioning card is extremely versatile in carrying out positioning and position controlling tasks.
To make it easier for you to decide which configuration will be most suitable for the application at hand, a
description of the various ways of setpoint setting and actual value recognition is provided below.
Setpoints can be fed to the control system as either absolute or relative position values. Absolute position
setpoints should be preferred in applications where the same positions are approached over and over again,
as e.g. with shifting trolleys, elevators, shelf operating equipment etc. Relative position setpoints are obviously
more suitable where axles operate in an intermittent fashion, especially endless ones driving turntables or
clock-controlled metering belts. Setpoints can also be transmitted over the bus (Profibus, CAN, Interbus, or
USS interface). In that case the position is translated into an encoded value or into a bit combination
representing the number of a position or a position increment.
If the operator wishes to quit the positioning mode and activate speed setting instead, he can do so by
switching parameter sets. While in one parameter set the position control parameter must be set to "On", an
"Off" setting will be required in the other. Switching between parameter sets is possible any time.
Position recognition can be handled using either an incremental or an absolute encoder. With rotary axles
turning in one direction most of the time, only an increment encoder can be used, since with absolute
encoders the range of values is limited to ±50000 revolutions. Using an incremental encoder implies that a
reference point will be needed.
3.2 Actual position recognition
3.2.1 Position recognition with an incremental encoder
The actual position is determined by the Posicon card processor. This calculation presupposes a reference
point which is used to define the zero position of the axle. The position recognition function will be active as
long as the frequency inverter is supplied with a voltage. The pulses generated by the incremental encoder are
counted in the inverter and added to the actual position value. When the inverter supply voltage is switched
on, the device will read out "0" as the actual position if the position saving option in parameter P606 has not
been activated, or else the value which was read out last before the inverter was switched off, if the position
saving option in P606 has been set to ON.
The position recognition function will work whether an enable signal has been fed to the inverter or not, and
also whether the P600 position control parameter has been set to ON or to OFF. The inverter will proceed with
actual position detection as long as it is supplied with a voltage.
Changes of position which take place while the frequency inverter is disconnected have no effect on actual
position indication. That is why a search for the reference point is usually required whenever the frequency
inverter is connected to the mains.
While generally the incremental encoder must be installed on the motor shaft, it may be accommodated
elsewhere if it is not possible to operate the inverter in the servo mode (P300). In that case the transmission
ratio between motor and incremental encoder needs to be parameterized. The inverter will convert the number
of revolutions determined by the incremental encoder into revolutions of the motor shaft proceeding from the
settings made in the multiplication and reduction parameters.
n
: number of motor shaft revolutions
M
n
= nG * Üb / Un n
M
: number of revolutions determined by increm. encoder
G:
Ü
: multiplication (P607
b
U
: reduction (P608
n
)
[1]
)
[1]
Example: The incremental encoder has been installed on the output side of the gearbox, the gearbox has got a
transmission ratio of i = 26.34. The following values should be set in the respective parameters:
multiplication: 2634; reduction: 100
On the software level an offset can be parameterized by which the starting point (zero) is transferred to a point
different from the one which is otherwise determined by the point of reference. After the value of incremental
encoder revolutions has been translated into a value representing the revolutions of the motor shaft, the offset
will be added to the actual position value. Accordingly a new offset value must be entered whenever the
multiplication or reduction setting has been changed.
BU 0710 GB 13
Page 14

NORDAC SK 700E manual Posicon special extension
3.2.1.1 Tracking the point of reference
Reference point tracking is started when one of the 6 digital inputs provided on the Posicon card or one of the
digital inputs of the customer interface is energized. Accordingly the digital input selected will have to be
programmed to execute this function (P618-P623, option 7; P420-P425 option 22). An enable left or enable
right signal is applied to define the direction in which the search for the reference point is to be performed. The
rate of reference point tracking depends on the current setpoint frequency. Reading in the point of reference is
ensured via one of the 6 digital inputs as well or else through one of the digital inputs of the customer
interface. For this to happen the digital input selected must have been assigned this function in the applicable
parameters (P618-P623, option 8; P420-P425 option 23).
The sequence of reference point tracking is as follows: When reference point tracking has been activated, the
the motor shaft will start turning in the direction the setpoint implies (enable right/left, setpoint sign +/-). The
direction of the motion is inverted by the signal received at the reference point input. When the axle has turned
so far as to trigger the reference point switch, the direction of motion is reversed. After the axle has moved out
of the operational range of the reference point switch again, reference point tracking continues until the
moment the next zero pulse is transmitted by the incremental encoder. If the position of the axle is such that
the switch responds the very moment reference point tracking is started, the axle will rotate in the inverse
sense right away. Likewise, after the axle has left the detection range of the switch, reference point tracking
will be completed when the next zero pulse of the incremental encoder is received.
This is when the current position is set to zero or to the value that has been set in the "offset" parameter. The
shaft remains in the new zero position until reference point tracking is terminated by the invalidation of the
"reference point tracking" signal. At the same time the setpoint position is set to zero in the "Position increment
array P610 = 1" position setpoint mode (relative positioning). When the frequency inverter has transferred the
reference point to memory, it will report that reference point tracking is complete through the action of multifunction relay 3 or 4, provided that one of these has been associated with the "reference point" function in the
relevant parameter.
If following a "reference point found" signal the incremental shaft encoder fails to supply a zero pulse before
the shaft has completed 1.5 revolutions, the inverter will signal a "reference point" error (E14/E142).
If the incremental encoder is used without at the same time activating the "Save position" function (see
parameter 606)), the inverter will indicate "0" to be the actual position when it is switched on again, whereas if
the inverter was instructed to save the position, it will read out the value that was stored last.
When the display is reading out a "reference point" signal triggered by the relay, this means that a valid point
of reference has been identified. The relay drops out when the search for a reference point begins and picks
up again when this search has been completed.
If the "Save position" option (P606) has not been selected (which is usually the case), the relay drops out
when the inverter is switched on again.
If the "Save position" option has been selected though, the relay picks up immediately the moment the inverter
is switched on.
Reference point tracking can be interrupted by application of an "enable", a "quick stop", or a "cut off voltage"
command (without an error signal being activated).
3.2.1.2 Reset position function
As an alternative to reference point tracking as described above, one of the digital inputs provided on the
Posicon special extension can be assigned a position resetting function (P618 – P623, option 11). In that case
the input will be active all the time - whereas when executing the reference point tracking function it is
operative in an intermittent fashion - and will instantly set the actual position to zero or to the value selected in
the "offset" parameter as soon as the signal changes from 0 to 1, whether position control is ON or OFF. The
setpoint position in the digital mode 2 (position increments) is set to zero as well.
The repetition accuracy of referencing by means of the reset function falls short of the precision obtained by
reference point tracking as described above – it depends on the tolerance of the reference point switch and
the rate at which the operating threshold of the switch is approached. For many applications it is sufficient
though. Besides referencing can be carried out without interrupting position control.
14 BU 0710 GB
Page 15

3 Functional characteristics
3.2.2
Position recognition with an absolute value encoder
The absolute encoder transfers the actual position value to the frequency inverter via the serial SSI interface in
Gray code. As the complete position information is stored in the absolute encoder all the time, it is still
available even if the axle has been moved while the inverter was off. That is why in this case the program
need not search for the reference point again.
If an absolute encoder is connected, the "distance calculation" parameter (P604) must be set to "absolute".
If the absolute encoder is not mounted on the motor shaft, the transmission ratio between motor and absolute
encoder must be specified in the relevant parameter. The inverter will convert the absolute revolutions to
revolutions of the motor by means of the multiplication and demultiplication parameters.
n
: number of revolutions of motor
M
n
= nE * mul / dev nE:: number of revolutions of absolute encoder
M
mul: multiplication
dem: demultiplication
Example: The absolute encoder is installed on the output face of the gearbox, the gear ratio of the gearbox is i = 26.34.
The following values are parameterised: multiplication 2634; demultiplication: 100
The sense of rotation of the absolute value encoder must be identical to that of the motor. When the phase
sequence of the output frequency is positive (clockwise sense of rotation), the actual position value is
supposed to grow. If the sense of rotation is found not to be the same, this condition can be corrected by
setting a negative value in P608 (demultiplication).
The zero point (point of origin) of the axle can be corrected by providing an offset value in the relevant
parameter. This offset value is added to the value obtained after the absolute encoder revolutions have been
converted into revolutions of the motor shaft. That is why a new offset value must be entered any time the
multiplication or demultiplication ratio has been changed.
The maximum allowable position value depends on the encoder resolution and on the multiplication or
demultiplication factors. The range of +/- 50000 revolutions cannot be exceeded however. A complete turn is
not allowed. With continuous axles turning in one direction most of the time, incremental encoders must be
used for position sensing. The inverter will limit position setpoints to the maximum allowable range of values
internally.
3.2.3
Encoder monitoring
When an absolute value encoder is used for position recognition, monitoring is ensured by activating the
voltage monitoring bit in the "Position detection monitoring" parameter (P617). The absolute encoder must
feature the corresponding option. If the bit succeeding the last data bit is not equal to 0, the value will be
ignored. If no value has been read by the end of a 500 ms period, the inverter puts out the "error E14 (E143)".
When both an absolute and an incremental encoder are involved, Parameter 631 can be used to check
whether any discrepancy occurs regarding the position information supplied by either of the two. The
maximum allowable deviation between the positions as sensed by the absolute and the incremental encoder
depends on the value set in parameter 631. A "0" setting will inactivate the monitoring function. When the
actual deviation exceeds the maximum allowable value, the "E14 (E146)“ error signal is activated. The
absolute and the incremental encoder are allowed to have different multiplication factors and to be installed in
different places. The system allows for individual multiplication (P607), demultiplication (P608), and offset
factors (P609) to be set for each of the two encoders.
If no second redundant encoder has been installed for position control, parameter P630 provides for defining a
position-related synchronization error. This approach is based on a comparison of the current position with the
position variation calculated from the current speed. Each time a destination position has been reached, the
estimated position is aligned with the actual value transmitted by the encoder in order to prevent the
synchronization error from accumulating with time. If the position difference exceeds the value set in P630, the
"Error 14 (145)" fault signal is activated. Where longer displacement distances are involved, higher values
should accordingly be provided in P630. The required value is best determined experimenting. Setting the
option to "0" will inactivate the monitoring function.
BU 0710 GB 15
Page 16

NORDAC SK 700E manual Posicon special extension
With the "minimum position" (P616) and "maximum position" (P615) parameters, limits for the allowable
working range can be defined. When the actual position is found to have exceeded these limits, the "E147"
error message (actual position exceeding maximum position) or the "E148“ error message (actual position
below minimum position) will be generated.
Encoder monitoring is completely deactivated by setting the option to "0". Monitoring is not available either in
the "position increment array" position setpoint mode (displacement increments), nor in the mode for
incremental position recognition. If position setpoints are defined which are less than the set minimum or
greater than the set maximum positions, inverter control will take care of that by limiting them accordingly.
3.2.4 Positioning with single-turn absolute value encoders and incremental shaft
encoders used in absolute mode
With turntables where the individual positions to be approached are distributed along the circumference, there
is a certain problem : If a multi-turn absolute value encoder was fitted to the output end of the gearbox or an
incremental shaft encoder to the motor or to the output face of the gearbox, with the setpoint position to be
changed from – 0.375 to + 0.375 the drive would adopt the longer displacement route – "go the long way
round" (see fig. a) – while typically the displacement from one position to the next ought to be ensured via the
shortest possible, in other words the optimal, route.
This effect can be prevented if operation of a single-turn absolute value encoder or of an incremental shaft
encoder is governed by the "absolute 1 revolution" mode setting (P606 options 16-31). As a result the drive
will follow the shorter displacement route, and in doing so pass the "overflow point" of the shaft encoder type
used (as shown in fig. b).
0.5 /-0 .5
-0 .3750.375
-0 .5-0 .5
-0 .1250.125
0
0.5 /-0 .5
-0 .3750.375
-0 .5-0 .5
-0 .1250.125
0
a) Normal displacement route b) Displacement route with single-turn absolute encoder
The point of origin (zero) of a single-turn absolute value shaft encoder depends on the position in which it is
installed and can be varied by providing an offset value. If an incremental shaft encoder is mounted on the
output face of a gearbox and operated in the "absolute 1 revolution" mode, with this encoder, too, the point of
origin is determined by the zero track. With each zero pulse the count is automatically reset (cf. P606 settings
16-23). Thus the incremental shaft encoder is automatically referenced with every complete turn. Likewise the
location of zero can be varied by providing an offset value. Automatic referencing is not possible however
when the incremental encoder is mounted on the motor (P606 setting 24-31).
P605 setting P606 setting Automatic referen.
Absolute shaft
encoder on
gearbox output
Incremental shaft
encoder on
gearbox output
0…3
0: SSI Single-Turn 512 marks
1: SSI Single-Turn 1024 marks
2: SSI Single-Turn 2048 marks
3: SSI Single-Turn 4096 marks
---
---
16…23
16: 500 marks absolute 1 revolution
.....
23: 5000 marks absolute 1 revolution
yes
no
16 BU 0710 GB
Page 17

3 Functional characteristics
Incremental shaft
encoder on the
motor
---
24…31
24: 500 marks absolute 1 revol. mode 2
.....
31: 5000 marks absolute 1 revol. mode 2
yes
The example shown above is based on a multiplication and demultiplication ratio of "1". The maximum position
value or the overflow point respectively is calculated as follows:
N
: max. value of motor shaft revolution
max
= ± 0.5 * Üb / Un Ü
±n
max
Example: The absolute value shaft encoder is mounted on the output face of a gearbox. The multiplication factor of the
gearbox is i = 26.34. The following values are parameterised: n
: multiplication (P607)
b
U
: demultiplication (P608)
n
max
= ± 13.17 Umdrehungen
3.3 Setpoint setting
Essentially four methods of setpoint setting are available. Setpoints can be fed to the system via digital inputs
as absolute or as relative position values, or they can be transmitted over a bus. The way the actual position is
ascertained is irrelevant for setpoint setting. Absolute, relative and bus setpoints can be defined whether an
absolute encoder or an incremental encoder is used to determine the actual position.
3.3.1
In the "position array" position setpoint mode, up to 63 positions per parameter set can be selected via the
digital inputs 1 through 6. The position numbers result from the binary value of the inputs. For each position
number one position setpoint can be parameterised. The position setpoint is either entered via the control
panel (of the control box or the parameter box) or the "NordCon" parameterisation software (by reading the
current position and saving it as the setpoint in the inverter's memory) or made permanent by "teach-in"
programming which implies that the operator will "demonstrate" to the system how to make the driven
assembly adopt the various positions.
Position array – Absolute setpoint position via digital inputs
3.3.2
Position increment array – Relative setpoint position via digital inputs
The "position increment array 2" position setpoint mode is especially suitable for rotary shafts. A value can be
assigned to each of the 6 digital inputs which will be added to the setpoint position when the signal changes
from 0 to 1 . As both positive and negative values can be used, control also allows for returning to the original
position. The addition is made with any positive signal edge whether the inverter is enabled or not. By applying
several pulses to one input, the multiple of the parameterised increment can be preset. The pulse width as
well as the width of the pulse intervals must be 10 ms minimum.
3.3.3
16-bit bus mode
The setpoint can be transmitted via any of the various field bus activation circuits available. The position is fed
to the system in terms of revolutions. The resolution is 1/1000 rev. For setpoints to be transmitted via the serial
interface, the applicable option must be enabled in the P509 "Interface" parameter included in the "Additional
Functions" menu group. Parameter P546 (Bus - setpoint 1) is accessed to define whether 16 or 32 bits are to
be used for setpoint transmission. For detailed information regarding bus setpoints see the relevant
supplementary operating instructions.
3.3.4
32-bit bus mode
Same as 3.3.3, the word length being 32 bits however. In this mode the setpoint exactly corresponds to the
value represented in P602 (one motor revolution = 1000 in P602 and 1000
3.3.5
Position array – Bus transmission of absolute setpoint position
if transmitted as a bus setpoint).
10
Basically as 3.3.1, except that the position numbers are defined using bits 0...6 of the serial interface. In this
mode, the setting "Posicon control terminals" will have to be selected for one of the bus setpoints (P546, P547,
and P548).
BU 0710 GB 17
Page 18

NORDAC SK 700E manual Posicon special extension
3.3.6
Position increment array – Bus transmission of absolute setpoint position
Basically as 3.3.2, except that bits 0..6 of the serial interface are used to define the position increments.
The other bits can be used to control point-of-reference tracking, teach-in programming, and the "reset
position" function.
Bit 0: position array / position increment array
Bit 1: position array / position increment array
Bit 2: position array / position increment array
Bit 3: position array / position increment array
Bit 4: position array / position increment array
Bit 5: position array / position increment array
Bit 6: point-of-reference tracking
Bit 7: point of reference
Bit 8: teach-in
Bit 9: quit teach-in
Bit 10: reset position
3.4
Teach-in programming
Apart from entering them directly in terms of a position array, the setpoint positions can also be parameterised
using the "teach-in" programming function.
"Teaching-in" via input terminals involves two inputs on the customer interface or the positioning board being
assigned. Of these inputs one is programmed to execute the "teach-in" function and the other to execute the
"quit teach-in" function. "Teaching-in" is started applying a "1" signal to the chosen input. This command
remains active until the signal is removed. With a change of the "quit teach-in" signal from 0 to 1, the current
position value is stored as a setpoint position in the inverter memory.
The position number is defined using the option for digital input position setting. If no input is activated
(position 0), the position number is generated by an internal counter. The count will be increased each time a
position has been transferred to memory. When the "teach-in" programming function is started with a position
setting of 0, the count will be 1. When the value is stored with the "quit teach-in" digital input being energized,
the count is increased. As soon as a position is addressed via the digital inputs, the counter is set to the
number of this position.
While the "teach-in" programming function is active, the frequency inverter can be controlled by feeding to it
enable signals and frequency setpoints (in the same way as with the position control parameter set to OFF).
"Teach-in" programming can also be ensured via a field bus system. In that case the "Posicon control
terminals" setting will have to be selected for one of the bus setpoint modes (P546, P547, or P548).
3.5
Modes of position control (P600)
Positioning can be performed in either of two modes. They are different with regard to the way in which the
constant rate of progression during the positioning process is ensured. In one mode it is the frequency
(maximum frequency) set in parameter P105 which determines the rate at which the controlled unit is moving
on all through the process.
In the other the rate of constant progression can be selected by defining a setpoint in the usual way which
means that position and rate of displacement can be set independently of each other.
18 BU 0710 GB
Page 19

3 Functional characteristics
3.6 Position control
Position control is configured as a P control loop. Setpoint and actual position are constantly compared. The
setpoint frequency is calculated by multiplication of the position error with the value set in the "Position
controller P" parameter. Afterwards a maximum limit is determined which the setpoint frequency must not
exceed.
If the distance calculation function is activated, a derivative with respect to distance is calculated based on the
programmed braking time and the current speed. With braking time not being taken into account by distance
calculation, the speed would very probably be reduced too late, and the position be overshot. However braking
time is not a factor considered with highly dynamical systems where acceleration and deceleration periods are
extremely short, or with systems for which only very small displacement increments are defined.
Another parameter allows for the provision of settings for a destination window. In the destination window the
setpoint frequency is limited to minimum frequency (P104). In applications with varying loads and without
speed control, this parameter can be used to program a distance to be covered in crawling motion.
The destination window parameter does not affect the "Final position" relay signal.
Synoptical position control diagram:
frequency
max.
min.
T_brake
N_act
P_set
accel.time
P102
max. frequency
P105
f_maxf_min
size target window
decel.time
P103
P position controller
traveling with min.
frequency
time
(*)
(*) time depending on
"size of destination window"
P612
N_set
P_act
P position controller
BU 0710 GB 19
Page 20

NORDAC SK 700E manual Posicon special extension
3.7 Relay signals
The Posicon positioning card is endowed with two multi-function relays, each of which can be assigned one
function in a parameter. It is not possible to establish AND or OR circuits between any of these functions. The
following functions are available on both relays:
- Reference point
The relay signals that a valid reference point has been established. The relay drops out when reference
point tracking is started. As soon as the reference point is found the relay pulls up. The state the relay will be
in when the inverter voltage is switched on depends on the setting made in P606 (if the "save position"
option has been selected the relay will have picked up when the inverter is switched on, otherwise it will
have dropped out).
- Final position
The inverter will use this function to indicate that the setpoint position has been reached. The relay picks up
when the amount by which the actual position deviates from the setpoint position is smaller than the value
set in the "Relay hyst." parameter and when the current frequency is smaller than the + 2Hz minimum
frequency (P104).
- Reference position
The relay will close the circuit when the actual position is greater than or equal to the value defined in the
"Relay position" parameter. The relay will be released again when the actual position value becomes less
than "Relay reference position" – "Relay hyst". The sign is taken into account.
[Multifunction relay pulls up when p
act
> p
and drops out when p
ref
act
< p
ref
– p
hyst
]
- Absolute reference position
The function "absolute reference position" is basically similar to the function "reference position" except that
the actual position is processed as an absolute (unsigned) value. The relay is operated when the actual
position exceeds the parameterised value or drops below the value of the same but negative amount.
[Multifunction relay picks up when |p
act
| > |p
| and drops out when |p
ref
act
| < |p
ref
| – p
hyst
]
- Position array value
The relay picks up whenever any of the positions parameterised between 1 and 63 is either reached or
overshot. This function is available even if "position array" was not selected as position setpoint mode.
- Relay P541
Operation of the multifunction relay is defined in parameter P541. As a result unused relays can be
assigned other jobs via a field bus as required.
- Final reference position
The relay will close the circuit when the amount by which the actual position deviates from the reference
position is smaller than the value set in the "relay hyst." parameter.
[Multifunction relay picks up when |(p
- p
act
)| < p
ref
hyst
]
- Final absolute reference position
The relay closes the circuit when the absolute value of the amount by which the absolute actual position
deviates from the absolute reference position becomes smaller than the value set in the "relay hysteresis"
parameter.
[Multifunction relay pulls up when |(|p
vef
| - |p
act
|)| < p
hyst
]
All relay functions are available even if the system is not operated in the position control mode
(P600 = 0).
20 BU 0710 GB
Page 21

4 Positioning parameters
4 Positioning parameters
Parameter Setting / Description / Note Available with option
P600 (P) Position control ON / OFF
0...2
[ 0 ]
P601 Current actual position value
-50000...50000.000 rev. The current actual position value will be displayed.
P602 Current setpoint position value
-50000...50000.000 rev. The current setpoint position value will be displayed.
P603 Current position variance
-50000...50000.000 rev. The current deviation between actual and setpoint position will be displayed.
P604 Displacement measurement system
0...1
[ 1 ]
P605 Absolute value encoder
0...15
[ 15 ]
Activation of position control
0: OFF
1: Mode 1 ON (constant progression at maximum frequency)
2: Mode 2 ON (constant progression at setpoint frequency)
Way the actual position value is ascertained, in other words type of the shaft encoder being
used
0: Incremental value shaft encoder
1: Absolute value shaft encoder
The type of the absolute value shaft encoder is set here.
0: SSI single-turn 512 increments
1: SSI single-turn 1024 increments
2: SSI single-turn 2048 increments
3: SSI single-turn 4096 increments
4: SSI 16-revolution multi-turn 512 increments
5: SSI 16-revolution multi-turn 1024 increments
6: SSI 16-revolution multi-turn 2048 increments
7: SSI 16-revolution multi-turn 4096 increments
8: SSI 256-revolution multi-turn 512 increments
9: SSI 256-revolution multi-turn 1024 increments
10: SSI 256-revolution multi-turn 2048 increments
11: SSI 256-revolution multi-turn 4096 increments
12: SSI 4096-revolution multi-turn 512 increments
13: SSI 4096-revolution multi-turn 1024 increments
14: SSI 4096-revolution multi-turn 2048 increments
15: SSI 4096-revolution multi-turn 4096 increments
POS
POS
POS
POS
POS
POS
BU 0710 GB 21
Page 22

NORDAC SK 700E Manual Posicon special extension
Parameter Setting / Description / Note Available with option
P606 Incremental value shaft encoder
0...23
[ 6 ]
P607
-1000...1000
[ 1 ]
..-01 Æ incr.
..-02 Æ abs.
The type of incremental encoder is set here.
0: Incremental 500 increments
1: Incremental 512 increments
2: Incremental 1000 increments
3: Incremental 1024 increments
4: Incremental 2000 increments
5: Incremental 2048 increments
6: Incremental 4096 increments
7: Incremental 5000 increments
8: Incremental 500 increments with position storage
9: Incremental 512 increments with position storage
10: Incremental 1000 increments with position storage
11: Incremental 1024 increments with position storage
12: Incremental 2000 increments with position storage
13: Incremental 2048 increments with position storage
14: Incremental 4096 increments with position storage
15: Incremental 5000 increments with position storage
16: 500 increments absolute 1 revolution
17: 512 increments absolute 1 revolution
18: 1000 increments absolute 1 revolution
19: 1024 increments absolute 1 revolution
20: 2000 increments absolute 1 revolution
21: 2048 increments absolute 1 revolution
22: 4096 increments absolute 1 revolution
23: 5000 increments absolute 1 revolution
24: 500 increments absolute 1 revolution mode 2
25: 512 increments absolute 1 revolution mode 2
26: 1000 increments absolute 1 revolution mode 2
27: 1024 increments absolute 1 revolution mode 2
28: 2000 increments absolute 1 revolution mode 2
29: 2048 increments absolute 1 revolution mode 2
30: 4096 increments absolute 1 revolution mode 2
31: 5000 increments absolute 1 revolution mode 2
Multiplication
The multiplication factor for incremental and absolute value shaft encoders is set here.
nn
=
GM
tionmultiplica
ationdemultipic
POS
POS
P608
0...1000
[ 1 ]
P609
-50000...50000.000 rev.
[ 0 ]
P610 Position setpoint mode
0...1
[ 0 ]
P611 (P) P position controller
0,1...100,0 rev
[ 5 ]
..-01 Æ incr.
..-02 Æ abs.
..-01 Æ incr.
..-02 Æ abs.
Demultiplication
The demultiplication factor for incremental and absolute value shaft encoders is set here.
Position offset
In this parameter the position offset for absolute and incremental shaft encoders can be
defined separately depending on which of the two displacement measurement systems is
involved.
To set the desired position two different modes are available. The position can be defined as
either an absolute or a relative value.
0: Position array Æ an absolute position is defined
1: Position increment array Æ a relative position is defined
The P gain of position control can be varied. Too high a value will lead to overswinging,
whereas if it is too low, precision of positioning will be affected. The rigidity of the axle at
standstill increases with rising P values.
POS
POS
POS
POS
22 BU 0710 GB
Page 23

4 Positioning parameters
Parameter Setting / Description / Note Available with option
P612 (P) Size of destination window
0,1...100,0 rev
[ 0 ]
The destination window allows for ensuring a crawling motion towards the end of the
positioning operation. Inside the destination window the maximum rate of progression
depends on the setting made in parameter P104 (minimum frequency) rather than on the
maximum or setpoint frequency.
Important: If when setting up a destination window the minimum frequency set in
parameter P104 is 0Hz, the final position cannot be reached.
P613 (P)
..-01
…
-50000...50000.000 rev.
[ 0 ]
..-63
Position array element
Array for the 63 different setpoint positions which can be selected in the "position array"
setpoint mode via the digital inputs or via a field bus.
P614 (P)
-50000...50000.000 rev.
[ 0 ]
..-01
…
..-06
Position increment array element
Array for the 6 position increments which are selected in the "position increment array"
position setpoint mode via the digital inputs or via a field bus. With each change of signal from
"0" to "1" at the digital input involved, the value allocated to the digital input is added to the
position setpoint.
P615 (P) Maximum position
-50000...50000.000 rev.
[ 0 ]
Setpoints are limited to the value set here. When the actual position setpoint exceeds this
value, the error signal "E147" indicating that the maximum position was exceeded, becomes
active. When this parameter is set to 0, position monitoring is deactivated.
P616 (P) Minimum position
-50000...50000.000 rev.
[ 0 ]
Setpoints are limited to the value set here. When the actual position value drops below this
amount, the error signal "E148" indicating that the minimum position was exceeded, is
activated. Position monitoring is deactivated by setting this parameter to "0".
P617 Monitoring of position recognition
0...1
[ 0 ]
This type of monitoring can be used with absolute value shaft encoders where a voltage
monitoring bit is available.
P618 Function digital input 7
0...11
[ 1 ]
"Bit 0 position array / position increment array“ is the default setting
P619 Function digital input 8
0...11
[ 2 ]
"Bit 1 position array / position increment array“ is the default setting
P620 Function digital input 9
0...11
[ 3 ]
"Bit 2 position array / position increment array“ is the default setting
P621 Function digital input 10
0...11
[ 4 ]
"Bit 3 position array / position increment array" is the default setting
P622 Function digital input 11
0...11
[ 7 ]
"Bit 4 position array / position increment array“ is the default setting
POS
POS
POS
POS
POS
POS
POS
POS
POS
POS
POS
BU 0710 GB 23
Page 24

NORDAC SK 700E Manual Posicon special extension
Parameter Setting / Description / Note Available with option
P623 Function digital input 12
0...11
[ 8]
"Bit 5 position array / position increment array“ is the default setting
0: No function
1: Bit 0 position array / position increment array
2: Bit 1 position array / position increment array
3: Bit 2 position array / position increment array
4: Bit 3 position array / position increment array
5: Bit 4 position array / position increment array
6: Bit 5 position array / position increment array
7: Reference point tracking
8: Reference point
9: Teach-in
10: Quit teach-In
11: Reset position
P624 (P) Function relay 3
0...8
[ 2 ]
"Final position reached“ is the default setting
0: No function
1: Point of reference
2: Final position reached
3: Reference position
4: Absolute value of reference position
5: Value of position array
6: Relay control via P541
7: Reference position reached
8: Absolute value of reference position ensured
P625 (P) Hysteresis relay 3
0,00...99,99 rev
[ 1 ]
Difference between operate point and release point which will prevent oscillation of the output
signal.
P626 (P) Reference position relay 3
-50000...50000,000 rev
[ 0 ]
Reference position for the settings 3, 4 and 7, 8 of relay 3
P627 (P) Function relay 4
0...8
[ 0 ]
Default setting is "no function"
0: No function
1: Reference point
2: Final position reached
3: Reference position
4: Absolute amount of reference position
5: Value of position array
6: Relay controlled via P541
7: Reference position reached
8: Absolute value of reference position ensured
P628 (P) Hysteresis relay 4
0,00...99,99 rev
[ 1 ]
Difference between operate and release point preventing oscillation of the output signal.
P629 (P) Reference position relay 4
-50000...50000,000 rev
[ 0 ]
Reference position for the settings 3, 4 and 7, 8 of relay 4
P630 (P) Pos. synchronization error
0,00...99,99 rev
[ 0 ]
The allowable deviation between estimated and actual position can be set. As soon as a
desired position is reached, the estimated position is set to the current actual position.
By adopting a "0" setting the synchronization error monitoring function can be deactivated.
POS
POS
POS
POS
POS
POS
POS
POS
24 BU 0710 GB
Page 25

4 Positioning parameters
Parameter Setting / Description / Note Available with option
P631 (P) Abs / inc synchronization error
0,00...99,99 rev
[ 0 ]
The allowable deviation between absolute value shaft encoder and incremental value shaft
encoder information can be set here.
Monitoring is deactivated with a "0" setting.
POS
BU 0710 GB 25
Page 26

NORDAC SK 700E Manual Posicon special extension
5 System start-up
When setting up Posicon control for an application it is advisable to carry out the individual steps in the order
described below. For errors that may occur during this stage see also Section 6, Fault clearance.
st
step: Putting the axle into operation without control
1
After all parameter settings have been entered as required, begin by putting the axle into operation without
position or speed control. Accordingly switch off position control in the "Positioning" parameter group, and the
servo mode in the "Control parameters" parameter group.
Important note: Make sure that emergency stop and safety circuits are operative!
With lifting gear applications take precautions before turning on the power for the first time to ensure that the
load will not suddenly drop or sag.
In speed-controlled lifting gear, set the speed controller before you optimise the moment the load is taken up
(setpoint delay parameter).
nd
2
step: Putting the speed controller into operation
If no speed control is desired or no incremental encoder provided, disregard this step, otherwise set the servo
mode to ON. For operation in the servo mode, enter the exact motor data and the correct number of encoder
graduation marks.
If after the servo mode has been activated the motor runs at low speed while the current input is high, this is
caused in all probability by a wiring error or by a parameterisation error concerning the connection of the
incremental encoder. Very often the above condition results from a discrepancy between the sense of rotation
of the motor and the counting direction of the encoder. Preferably the speed controller is not optimised until
the position controller is put into operation, because the behaviour of the position control loop can be
manipulated by varying the parameters relating to the speed controller.
rd
3
step: Putting the position controller into operation
When the parameters P604, P605/606 have been set, check first whether the actual position is recognized
correctly. The actual position is read out in the "Current position" parameter (P601). The value is supposed to
be stable, and to increase when the motor is activated with the "enable right" command. If the value does not
change when the axle is rotated, check on the parameter settings and the encoder connection. The same
checking should be performed if the actual position value read out is erratic although the shaft does not move.
After that a setpoint position should be parameterised next to the current position. If the axle moves away from
that position rather than towards it when the motor has been enabled, the sense of rotation of the motor does
not match the sense of rotation of the encoder. Exchange the sign of the multiplication factor to put things
right.
When actual position recognition is working correctly, the position controller can be optimised. As a rule the
axle will respond more "rigidly" as the P gain is increased, in other words there will be less deviation from the
setpoint position than with minor gain values.
The maximum P gain of the position controller that can reasonably be set depends on the dynamical
behaviour of the total system. As a rule the following principle is true: The greater the masses involved in the
system and the less the friction, the more it is prone to oscillation, and the less is the maximum allowable P
gain value. To determine the critical value, the gain is gradually increased until the drive oscillates around the
position (departing from it for an instant and returning to it again). After that set the gain to between 0.5 and
0.7 times the critical value.
As the default setting will probably not be adequate for positioning applications with cascaded controller (servo
mode) involving heavy loads, a different setting should be preferred, e.g. a value between 3% and 5% for the I
gain of the speed controller, and a value between 100% and 150% as the P gain.
26 BU 0710 GB
Page 27
6 Fault clearance
6 Fault clearance
6.1 Error messages
The majority of the frequency inverter functions and operational information is continuously monitored and
compared to limit values. Detecting a deviation the inverter will put out a warning or an error message.
For fundamental information on this subject kindly refer to the Operating Instructions for the basic unit.
The table below contains all of those faults which can be attributed to the Posicon function. It should be noted
that as far as the optional "Control Box" is concerned, only the error codes E14 or E15 will be shown however.
Access parameter P700 (current fault) or P701 (previous fault) for detailed information on the error that has
occurred.
Faults Cause Remedy
E14 / E140-E141
E14 / E142
E14 / E143
E4 / E145
E14 / E146
E14 / E147
E14 / E148
E15 / E150
• EMC measures inadequate
• Posicon extension was not fitted
correctly
• Reference point tracking was
interrupted without a reference
point having been found
• Absolute encoder defective, or
communication fault
• Position recognition doesn't
work correctly, or there is an
open-circuit fault
• Position recognition doesn't
work correctly, or there is an
open-circuit fault
• Maximum position was
exceeded
• Minimum position was exceeded • Check controller and setpoint settings
• Software version is wrong • Software versions of the basic unit and
• Provide output choke, check
parameter settings
• Check on installation
• Check reference point switch and the
zero track of the incremental encoder,
check the selection circuit too
• Check the absolute encoder and cable
routing / connections
• Check position recognition function
• Check position recognition function
• Check controller and setpoint settings
the positioning extension are not
compatible
E15 / E151-E158
BU 0710 GB 27
• Internal program flow error • Check screening and earth
connection
Page 28

NORDAC SK 700E Manual Posicon special extension
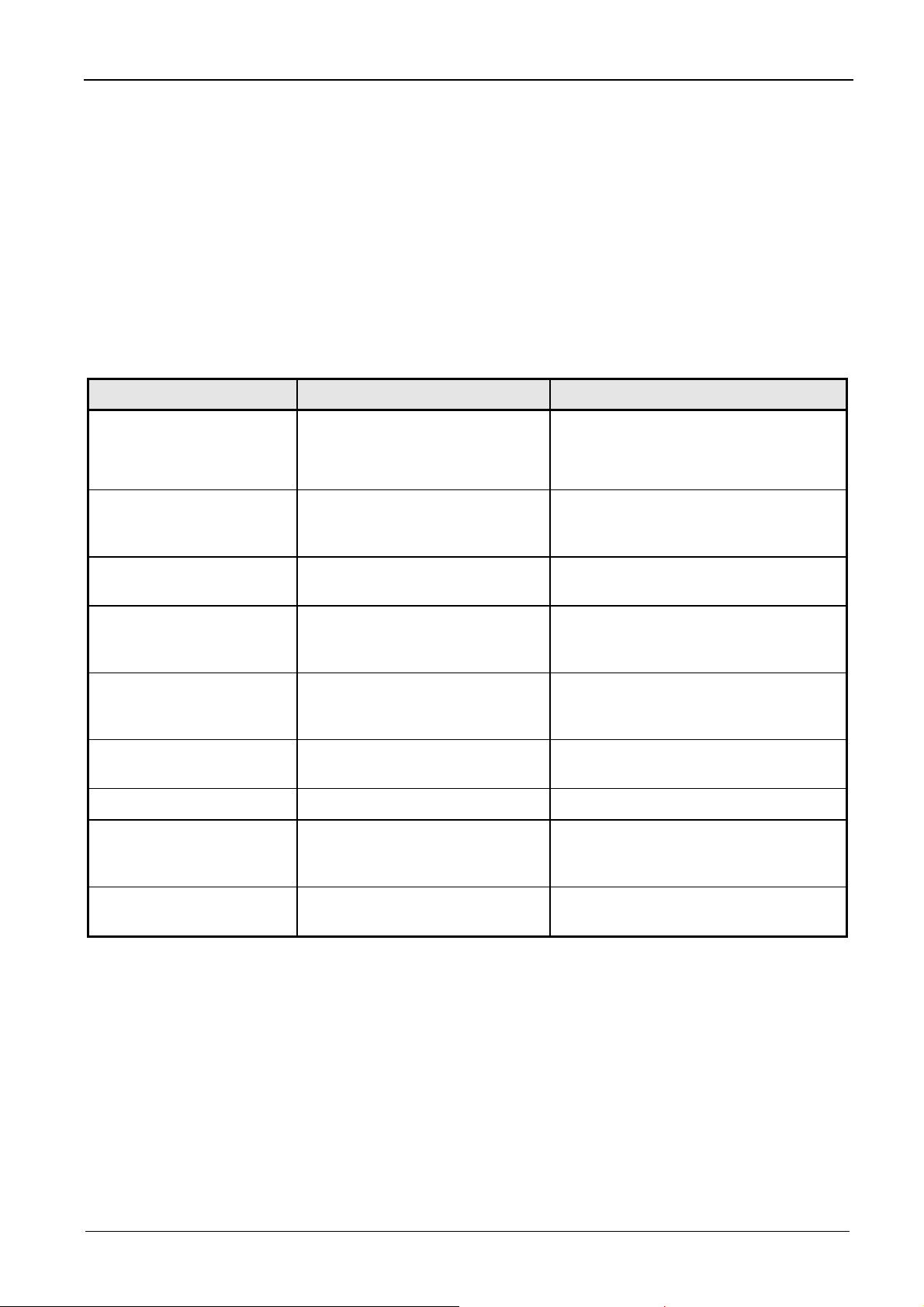
6.2 Table of errors and possible causes
In the table below the most frequent error sources are listed along with the characteristic symptoms. For
trouble shooting best proceed in the same order as when starting up the system, that is check first whether the
shaft runs correctly without being controlled, and only then go on to testing the speed and the position
controller.
1. Error sources while the system is operated in the servo mode (without position control)
Symptom Additional checking Possible cause
Motor speed very low, motor runs
jerkily
Motor speed is basically o.k.,
however there is some jerking at
lower speed
Overcurrent release at high speeds
Change sign in P301
Problems disappear when the
servo mode is switched off
• Motor sense of rotation and
incremental encoder counting
direction do not match
• Inappropriate incremental
encoder type (no RS422
outputs)
• Interruption of encoder cable
• No power is supplied to the
encoder
• The number of graduation
marks parameterised was
wrong
• Motor parameters are not
correct
• Encoder lacks one track
• Incremental encoder was not
installed correctly
• Encoder signals disturbed
Overcurrent tripping during
deceleration
2. General error sources
Symptom Additional checking Probable cause
Overshooting of position P gain value of position controller
Drive oscillates about position Too high a value set for P gain of
Drive moves into wrong direction
(away from setpoint position)
Load sagging after the enable
signal is invalidated (lifting gear)
Motor in field weakening range
• With field weakening operation
in the servo mode, the torque
limit must not exceed 200%
distinctly too high
Speed controller setting (servo
mode) inadequate (set I gain to
approx. 3%/ms, P gain to approx.
120%)
position controller
Sense of rotation of the absolute
encoder does not correspond to the
sense of rotation of the motor =>
set a negative multiplication value
in the relevant parameter
No setpoint delay was set (control
parameter); with the servo mode =
OFF the controller must be disabled immediately when the event
"final position reached" has
occurred
28 BU 0710 GB
Page 29

6 Fault clearance
3. Typical error sources in position control with incremental position recognition (without absolute
encoder)
Symptom Additional checking Possible cause
Reference point error
• Reference point tracking
completed but failed
• Encoder lacks zero track, or
encoder is defective
Drive drifts away from desired
position
• Encoder cable affected by
interference pulses
No repetitive accuracy when
moving into identical positions
Fault occurs even at low speed
(n < 1000 1/min))
• Encoder cable affected by
interference pulses
several times
Fault occurs at high speed only
(n > 1000 1/min)
• Number of graduation marks
too high considering the length
of encoder cable / the cable
type (pulse frequency too high)
4. Typical error sources in position control with absolute encoder
Symptom Additional checking Possible causes
The same actual position value is
signalled over and over again and
• Encoder connection is not
correct
remains steady afterwards
Current position is displayed as an
erratic ("jumping") value although
• Encoder cables are affected by
interference pulses
the shaft does not move
Recognition function supplies
varying information on the same
position; sometimes the axle
Is there any mechanical
irregularity?
• Axle is tight, getting jammed, or
does not move smoothly for
any other reason
seems to jump to and fro.
Position value is not in accordance
with amount of encoder rotation or
is erratic => shaft encoder is
defective
Check absolute encoder
(detach it, set multiplication and
demultiplication parameters to 1,
turn encoder by hand: the position
• Encoder defective
indicated must be in accordance
with the encoder revolutions)
BU 0710 GB 29
Page 30

NORDAC SK 700E Manual Posicon special extension
7 Business establishments & sales offices in Germany
G e tr i e b e b a u N O R D representative offices in Germany:
Niederlassung Nord
Getriebebau NORD GmbH & Co. KG
Rudolf-Diesel-Str. 1
22941 Bargteheide
Tel. 04532 / 401 - 0
Fax 04532 / 401 - 429
Niederlassung West
Getriebebau NORD GmbH & Co. KG
Großenbaumer Weg 10
40472 Düsseldorf
Tel. 0211 / 99 555 - 0
Fax 0211 / 99 555 - 45
Niederlassung Süd
Getriebebau NORD GmbH & Co. KG
Katharinenstr. 2-6
70794 Filderstadt-Sielmingen
Tel. 07158 / 95608 – 0
Fax 07158 / 95608 - 20
Niederlassung Ost
Getriebebau NORD GmbH & Co. KG
Leipzigerstr. 58
09113 Chemnitz
Tel. 0371 / 33 407 - 0
Fax 0371 / 33 407 - 20
Vertriebsbüro Bremen
Getriebebau NORD GmbH & Co. KG
Am Suletal 16
27232 Sulingen
Tel. 04271 / 9548 - 50
Fax 04271 / 9548 - 51
Vertriebsbüro Butzbach
Getriebebau NORD GmbH & Co. KG
Marie-Curie-Str. 2
35510 Butzbach
Tel. 06033 / 9623 - 0
Fax 06033 / 9623 - 30
Vertriebsbüro Nürnberg
Getriebebau NORD GmbH & Co. KG
Schillerstr. 3
90547 Stein
Tel. 0911 / 67 23 11
Fax 0911 / 67 24 71
Vertriebsbüro Berlin
Getriebebau NORD GmbH & Co. KG
Roedernstr. 8
12549 Berlin
Tel. 030 / 639 79 413
Fax 030 / 639 79 414
Vertriebsbüro München
Getriebebau NORD GmbH & Co. KG
Untere Bahnhofstr. 38a
82110 Germering
Tel. 089 / 840 794 - 0
Fax 089 / 840 794 - 20
Vertretung:
Hans-Hermann Wohlers
Handelsgesellschaft mbH
Ellerbuscher Str. 177a
32584 Löhne
Tel. 05732 / 4072
Fax 05732 / 123 18
Stammhaus Deutschland / Head Office Germany:
Getriebebau NORD GmbH & Co. KG
Rudolf- Diesel- Straße 1
D – 22941 Bargteheide
Tel. +49 / (0) 4532 / 401 – 0
Fax +49 / (0) 4532 / 401 – 253
Info@nord-de.com
http://www.nord.com
30 BU 0710 GB
Page 31

Getriebebau NORD international subsidiaries:
7 Business establishments & sales offices in Germany
Austria / Österreich
Getriebebau NORD GmbH
Deggendorfstr. 8
A – 4030 Linz
Tel.: +43-732-318 920
Fax: +43-732-318 920 85
info@nord-at.com
Canada / Kanada
NORD Gear Limited
41, West Drive
CDN - Brampton, Ontario, L6T 4A1
Tel.: +1-905-796-3606
Fax: +1-905-796-8130
info@nord-ca.com
Denmark / Dänemark
NORD Gear Danmark A/S
Kliplev Erhvervspark 28 – Kliplev
DK - 6200 Aabenraa
Tel.: +45 73 68 78 00
Fax: +45 73 68 78 10
info@nord-dk.com
Great Britain / Großbritannien
NORD Gear Limited
11, Barton Lane
Abingdon Science Park
GB - Abingdon, Oxfordshire OX 14 3NB
Tel.: +44-1235-5344 04
Fax: +44-1235-5344 14
info@nord-uk.com
Italy / Italien
NORD Motoriduttori s.r.l.
Via Modena 14
I - 40019 Sant’ Agata Bolognese (BO)
Tel.: +39-051-6829711
Fax: +39-051-957990
info@nord-it.com
P.R. China / V. R. China
NORD (Beijing) Power Transmission Co.Ltd.
No. 5 Tangjiacun,
Guangqudonglu, Chaoyangqu
Beijing 100022
Tel.: +86-10-67704 -069 (-787)
Fax: +86-10-67704 -330
Fpan@nord-cn.com
Slowakia / Slowakei
NORD Pohony, s.r.o
Stromová 13
SK - 83101 Bratislava
Tel.: +421-2-54791317
Fax: +421-2-54791402
info@nord-sl.com
Switzerland / Schweiz
Getriebebau NORD AG
Bächigenstr. 18
CH - 9212 Arnegg
Tel.: +41-71-388 99 11
Fax: +41-71-388 99 15
info@nord-ch.com
Belgium / Belgien
NORD Aandrijvingen Belgie N.V.
Boutersem Dreef 24
B - 2240 Zandhoven
Tel.: +32-3-4845 921
Fax: +32-3-4845 924
info@nord-be.com
Croatia / Kroatien
NORD Pogoni d.o.o.
Obrtnicka 9
HR - 48260 Krizevci
Tel.: +385-48 711 900
Fax: +385-48 711 900
Finland / Finnland
NORD Gear Oy
Aunankorvenkatu 7
FIN - 33840 Tampere
Tel.: +358-3-254 1800
Fax: +358-3-254 1820
info@nord-fi.com
Hungary / Ungarn
NORD Hajtastechnika Kft.
Törökkö u. 5-7
H - 1037 Budapest
Tel.: +36-1-437-0127
Fax: +36-1-250-5549
info@nord-hg.com
Netherlands / Niederlande
NORD Aandrijvingen Nederland B.V.
Voltstraat 12
NL - 2181 HA Hillegom
Tel.: +31-2525-29544
Fax: +31-2525-22222
info@nord-nl.com
Poland / Polen
NORD Napedy Sp. z.o.o.
Ul. Grottgera 30
PL – 32-020 Wieliczka
Tel.: +48-12-288 22 55
Fax: +48-12-288 22 56
biuro@nord.pl
Spain / Spanien
NORD Motorreductores
Ctra. de Sabadell a Prats de Llucanès
Aptdo. de Correos 166
E - 08200 Sabadell
Tel.: +34-93-7235322
Fax: +34-93-7233147
info@nord-es.com
Turkey / Türkei
NORD-Remas Redüktör San. ve Tic. Ltd. Sti.
Tepeören Köyü
TR - 81700 Tuzla – Istandbul
Tel.: +90-216-304 13 60
Fax: +90-216-304 13 69
info@nord-tr.com
Brazil / Brasilien
NORD Motoredutores do Brasil Ltda.
Rua Elias Gannam, 83
CEP: 02552 - 040 São Paulo SP
Tel.: +55-11-3951 5855
Fax: +55-11-3955 2144
info@nord-br.com
Czech. Republic / Tschechien
NORD Pohánèci Technika s.r.o
Palackého 359
CZ - 50003 Hradec Králové
Tel.: +420-49 521 02 95
Fax: +420-49 521 06 91
info@nord-cz.com
France / Frankreich
NORD Réducteurs sarl.
17-19 Avenue Georges Clémenceau
F - 93421 Villepinte Cedex
Tel.: +33-1-49 63 01 89
Fax: +33-1-49 63 08 11
info@nord-fr.com
Indonesia / Indonesien
PT NORD Indonesia
Jln. Raya Serpong KM. 7
Kompleks Rumah Multi Guna Blok D No. 1
Pakulonan (Serpong) - Tangerang
West Java - Indonesia
Tel.: +62-21-5312 2222
Fax: +62-21-5312 2288
info@nord-ri.com
Norway / Norwegen
NORD Gear Norge A/S
Vestre Haugen 21
N - 1054 Furuset / Oslo
Tel.: +47-23 33 90 10
Fax: +47-23 33 90 15
info@nord-no.com
Singapore / Singapur
NORD Gear Pte. Ltd.
33 Kian Teck Drive, Jurong
Singapore 628850
Tel.: +65-265 9118
Fax: +65-265 6841
info@nord-sg.com
Sweden / Schweden
NORD Drivsystem AB
Ryttargatan 277 / Box 2097
S - 19402 Upplands Väsby
Tel.: +46-8-594 114 00
Fax: +46-8-594 114 14
info@nord-se.com
United States / USA
NORD Gear Corporation
800 Nord Drive / P.O. Box 367
USA - Waunakee, WI 53597-0367
Tel.: +1-608-849 7300
Fax: +1-608-849 7367
info@nord-us.com
BU 0710 GB 31
Page 32

NORDAC SK 700E Manual Posicon special extension
Getriebebau NORD GmbH & Co. KG
http://www.nord.com/
Specification subject to change without prior notice
Änderungen vorbehalten
T. Nr. 0603 7182
Printed in Germany
 Loading...
Loading...