

Page 1

Intelligent Drivesystems, Worldwide Services
SUPPLEMENTARY MANUAL BU 0260 GB
CAN OPEN FOR
FREQUENCY INVERTER NORDAC SK 200E
Illustration of devices with options
Getriebebau NORD GmbH & Co. KG
Rudolf-Diesel-Straße 1
D-22941 Bargteheide, Germany
Tel.: +49 45 32 - 40 10
Fax: +49 45 32 - 40 12 53
BU 0260 GB
Page 2

Supplementary Manual CANopen for NORDAC SK 200E
2 BU 0260 GB
Page 3

Supplementary Manual CANopen for NORDAC SK 200E Safety information
NORDAC frequency inverter
Safety and operating instructions
for drive power converters
1.General
During operation, drive power converters may, depending on their
protection class, have live, bare, moving or rotating parts or hot
surfaces.
Unauthorised removal of covers, improper use, incorrect installation
or operation causes a risk of serious personal injury or material
damage.
Further information can be found in this documentation.
All transportation, installation and initialisation and maintenance
work must be carried out by qualified personnel (comply with IEC
364, CENELEC HD 384, DIN VDE 0100, IEC 664 and DIN VDE
0110, and national accident prevention regulations).
For the purposes of these basic safety instructions, qualified
personnel are persons who are familiar with the assembly,
installation, commissioning and operation of this product and who
have the relevant qualifications for their work.
2. Proper use in Europe
Drive power converters are components intended for installation in
electrical systems or machines.
When installed in machines, the drive power converter cannot be
commissioned (i.e. commencement of the proper use) until it has
been ensured that the machine meets the provisions of the EC
Directive 89/392/EEC (machine directive); EN 60204 must also be
complied with.
Commissioning (i.e. implementation of the proper use) is only
permitted when the EMC directive (89/336/EEC) is complied with.
The drive power converters meet the requirements of the Low
Voltage Directive 73/23/EEC. The harmonised standards in prEN
50178/DIN VDE 0160, in association with EN 60439-1/VDE 0660
Part 500 and EN 60146/VDE 0558 were used for the drive power
converter.
Technical data and information for connection conditions can be
found on the rating plate and in the documentation, and must be
complied with.
3. Transport, storage
Information regarding transport, storage and correct handling must
be complied with.
(as per: Low Voltage Directive 73/23/EEC )
4. Installation
The installation and cooling of the equipment must be
implemented according to the regulations in the
corresponding documentation.
The drive power converter must be protected against impermissible loads. Especially during transport and
handling, components must not be deformed and/or
insulation distances must not be changed. Touching of
electronic components and contacts must be avoided.
Drive power converters have electrostatically sensitive
components, which can be easily damaged by incorrect
handling. Electrical components must not be mechanically
damaged or destroyed (this may cause a health hazard!).
5. Electrical connection
When working on live drive power converters, the applicable
national accident prevention regulations must be complied
with (e.g. VBG 4).
The electrical installation must be implemented as per the
applicable regulations (e.g. cable cross-section, fuses, earth
lead connections) . Further instructions can be found in the
documentation.
Information regarding EMC-compliant installation – such as
shielding, earthing, location of filters and installation of
cables – can be found in the drive power converter
documentation. These instructions must be complied with
even with CE marked drive power converters. Compliance
with the limit values specified in the EMC regulations is the
responsibility of the manufacturer of the system or machine.
6. Operation
Systems where drive power converters are installed must
be equipped, where necessary, with additional monitoring
and protective equipment as per the applicable safety
requirements, e.g. legislation concerning technical
equipment, accident prevention regulations, etc.
Modifications to the drive power converter using the
operating software are permitted.
After the drive power converter is disconnected from the
power supply, live equipment components and power
connections should not be touched immediately, because of
possible charged capacitors. Observe the applicable
information signs located on the drive power converter.
All covers must be kept closed during operation.
7. Maintenance and repairs
The manufacturer documentation must be complied with.
These safety instructions must be kept in a safe place!
BU 0260 GB 3
Page 4
Supplementary Manual CANopen for NORDAC SK 200E About this document
Documentation
Designation: BU 0260 GB
Part No.: 607 26 01
Device series: CANopen for SK 200E
Device types: SK CU4-CAO
SK TU4-CAO(-C) with SK TI4-TU BUS
SK TU4-CAO-M12(-C) with SK TI4-TU BUS
Version list
Designation of
previous issues
BU 0260 GB, September 2009
Part. No. 607 2601 / 3809
Publisher
Software
version
V 2.0 R3 First issue
Comments
Getriebebau NORD GmbH & Co. KG
Rudolf-Diesel-Str. 1 D-22941 Bargteheide http://www.nord.com/
Tel.: +49 (0) 45 32 / 401-0 Fax +49 (0) 45 32 / 401-555
NOTE
This supplementary operating manual is only valid in conjunction with the
operating manual supplied for the respective frequency inverter.
4 BU 0260 GB
Page 5

Supplementary Manual CANopen for NORDAC SK 200E About this document
Intended use of the frequency inverter
Compliance with the operating instructions is necessary for fault-free operation and the
acceptance of possible warranty claims. These operating instructions must be read before
working with the device!
These operating instructions contain important information about servicing. They must
therefore be kept close to the device.
The field bus technology options described here are intended for use in combination with SK
200 E series frequency inverters. Use with other series is only possible with the SK TU4CAO(-C) and SK TU4-CAO-M12(-C) technology modules for the SK 500E. The use of these
technology options with other devices is not permitted and can lead to their destruction.
The field bus technology options and the associated frequency inverters are devices for fixed
installation on motors or in equipment close to the motor to be operated. All details regarding
technical data and permissible conditions at the installation site must be complied with.
Commissioning (implementation of the intended use) is not permitted until it has been
ensured that the machine complies with the EMC directive 89/336/EEC and that the
conformity of the end product meets the machine directive 89/392/EEC (note EN 60204).
Getriebebau NORD GmbH & Co. KG, 2009
BU 0260 GB 5
Page 6

Supplementary Manual CANopen for NORDAC SK 200E
1 GENERAL INFORMATION ...................................................................................................... 9
1.1 Overview ............................................................................................................ 10
1.2 Delivery .............................................................................................................. 10
1.3 Scope of supply ................................................................................................. 11
1.4 Certifications ...................................................................................................... 11
1.4.1 European EMC Directive ........................................................................................ 11
1.4.2 RoHS compliance ................................................................................................... 11
1.5 Type code / Optional BUS modules .................................................................. 12
1.6 Version with protection class IP55 / IP66 .......................................................... 13
2 ASSEMBLY AND INSTALLATION ....................................................................................... 14
2.1 Installation and assembly .................................................................................. 14
2.1.1 Overview of the CANopen modules ........................................................................ 16
2.1.2 Installing the Customer Unit SK CU4-CAO ............................................................. 17
2.1.3 Installing the SK TU4-CAO Technology Unit .......................................................... 18
2.2 Electrical connection .......................................................................................... 20
2.2.1 Cable glands ........................................................................................................... 20
2.2.2 Control connections ................................................................................................ 21
2.2.3 Configuration .......................................................................................................... 27
3 DISPLAYS AND DIAGNOSIS ................................................................................................ 29
3.1 LED displays ...................................................................................................... 29
3.1.1 Device-specific display versions ............................................................................. 29
3.1.2 Signal status LEDs ................................................................................................. 31
3.2 RJ12 Diagnostic socket ..................................................................................... 34
4 COMMISSIONING .................................................................................................................. 36
4.1 Quick commissioning ......................................................................................... 36
4.2 EDS file .............................................................................................................. 38
4.3 Hardware configuration of the CANopen bus modules ..................................... 38
4.4 Gateway function ............................................................................................... 39
4.5 Communication .................................................................................................. 39
4.5.1 Network Management (NMT).................................................................................. 39
4.5.2 PDO communication ............................................................................................... 39
4.5.3 PDO communication in drive profile DS 402 ("Velocity Mode") .............................. 44
4.5.4 SDO communication ............................................................................................... 45
4.6 Timeout monitoring ............................................................................................ 47
4.7 Saving the parameters ...................................................................................... 47
4.8 Special features of CANopen communication ................................................... 47
4.9 Object dictionary ................................................................................................ 48
4.9.1 Predefined Connection Set ..................................................................................... 49
4.9.2 CANopen profile DS301 ......................................................................................... 50
4.9.3 CANopen objects DSP402 – drive profile ............................................................... 53
4.9.4 Frequency inverter objects (2000
4.9.5 Error codes – cancellation of parameter communication ........................................ 56
4.9.6 Error messages (EMCY message) ......................................................................... 56
hex
- 3005
) ...................................................... 55
hex
5 PARAMETERISATION .......................................................................................................... 58
5.1 Parameterising the SK 200E frequency inverter ............................................... 58
5.1.1 Basic parameters (P100) ........................................................................................ 58
5.1.2 Control terminal parameters (P400) ........................................................................ 59
5.1.3 Supplementary parameter (P500) ........................................................................... 61
5.1.4 Information parameters (P700) ............................................................................... 65
5.2 Parameterisation of the bus module (SK CU4-… or SK TU4-…) ...................... 67
5.2.1 BUS module standard parameters (P150) .............................................................. 67
5.2.2 CANopen parameter (P160) ................................................................................... 68
5.2.3 BUS module information parameters, general (P170) ............................................ 72
5.2.4 Module information parameters specific to the bus (P180) ..................................... 75
6 BU 0260 GB
Page 7

Table of Contents
6 ERROR MONITORING AND ERROR MESSAGES ............................................................... 76
6.1 Error monitoring .................................................................................................. 76
6.1.1 Error monitoring details ........................................................................................... 76
6.1.2 EMCY message ..................................................................................................... 78
6.2 Error messages .................................................................................................. 79
6.2.1 Table of possible error messages (caused by the bus) in the frequency inverter ... 79
6.2.2 Table of possible error messages in the bus module .............................................. 80
7 CANOPEN DATA TRANSFER ............................................................................................... 81
7.1 Protocol .............................................................................................................. 81
7.2 Structure of reference data in USS standard ..................................................... 81
7.2.1 Process data (PZD) in USS standard ..................................................................... 83
7.2.2 The status machine ................................................................................................. 87
7.3 Structure of reference data in the standard drive profile (DS402) ..................... 89
7.4 Examples ............................................................................................................ 89
7.4.1 Configuration examples .......................................................................................... 89
7.4.2 Example telegrams ................................................................................................. 93
8 ADDITIONAL INFORMATION ................................................................................................ 98
8.1 Bus configuration ................................................................................................ 98
8.1.1 Laying of the CAN/CANopen bus cables ................................................................ 98
8.1.2 Cable material ......................................................................................................... 98
8.1.3 Cable layout and shielding (EMC measures) .......................................................... 99
8.1.4 CiA (CAN in Automation) recommendations ........................................................... 99
8.2 Cable glands and shielding connections .......................................................... 100
8.2.1 Fixed connection (cable gland) ............................................................................. 100
8.2.2 Connection with M12 round plug connectors ........................................................ 101
8.2.3 Round plug connector ........................................................................................... 101
8.3 CANopen technology and protocol .................................................................. 105
8.3.1 Overview /Protocol architecture ............................................................................ 105
8.3.2 Overview /Communication possibilities ................................................................. 106
8.4 System bus ....................................................................................................... 107
8.5 Repairs ............................................................................................................. 108
9 INDEX .................................................................................................................................... 109
10 KEYWORD INDEX .............................................................................................................. 112
11 REPRESENTATIVES / BRANCHES .................................................................................. 114
BU 0260 GB 7
Page 8

Supplementary Manual CANopen for NORDAC SK 200E
8 BU 0260 GB
Page 9

1 General information
1 General information
Various technology options are available for Getriebebau Nord frequency inverters. General information
regarding these can be found in the relevant main manual of the frequency inverter series (e.g. Manual
BU0200 for the SK 200E frequency inverter series). Further information concerning special technology
options (e.g. the field bus module) is included in the relevant supplementary operating instructions.
This CANopen documentation contains supplementary descriptions concerning the CANopen options for the
SK 200E frequency inverter series.
The description of other optional modules (e.g. PROFIBUS DP) is dealt with in other supplementary
documentation.
In order to set up communication with CANopen, either an internal Customer Unit or an external
CANopen Technology Unit (according to the particular application) must be installed and connected.
The CAN bus system
The CAN bus (Controller Area Network), developed by Bosch enables the implementation of powerful
automation systems with distributed intelligence. The widespread use of the CAN bus protocol is mainly due
to the availability of very economical protocol modules.
CAN Bus is based on a linear topology. Branch-like topologies are possible by using repeaters. In addition
to the use of twin conductor cables, there are also solutions based on optic fibres. The collision recognition
and resolution, as well as error recognition, integrated in the CAN bus protocol, enables high bus utilisation
and data security.
Bus access rights are not issued by a higher-level control unit. Instead, each subscriber can start
transmitting a message as soon as the bus is free (multi-master capability). With simultaneous access by
several participants, access is granted to the subscriber with the highest priority. The priority is assigned
according to the identifier of the messenger in the CAN bus.
CANopen
CANopen is an open communications profile for various industrial automation systems. It is based on the
CAN bus system and describes the layers 1 (physical layer) and 2 (data transfer) of the OSI reference
model (ISO 11898). CANopen was specified by the international CAN-in-Automation (CiA) organisation and
defines the communication mechanisms (process data, parameterisation, monitoring etc.) via the CANopen
bus.
CANopen can be used for data exchange between devices from different manufacturers.
As well as the communication profile, CANopen defines device profiles for the most important types of
device used in industrial automation technology, e.g. digital and analog I/Os, drives, etc.
Getriebebau Nord GmbH supports the CiA CANopen specification DS-301 and DS-402.
BU 0260 GB Subject to technical amendments 9
Page 10

Supplementary Manual CANopen for NORDAC SK 20E
1.1 Overview
Features of the CANopen Modules
Electrically isolated bus interface
Data transfer rate from 10kbit/sec to 1 Mbit/sec
Easy connection, optionally via M12 round plugs or screw terminals
Integrated bus terminating resistor (switchable)
CAN bus-specific status indication with 2 LEDs on the internal (Customer Unit) and external
(Technology Unit) technology option
DEVICE or FI-specific status indication with 2 LEDs on the internal (Customer Unit) and external
(Technology Unit) technology option
CAN interface as per specifications 2.0A and 2.0B
Up to four 24V inputs and two 24V outputs are integrated into the bus module
Direct connection of up to 4 sensors and 2 activators via M12 round plug connectors on the SK TU4-
CAO-M12(-C) version. Visualisation of signal status via LEDs
Transmission and selection of process and parameter data
CAN Bus gateway solution → up to 4 frequency inverters can be connected to a CANopen bus
module. Each FI is allocated its own SDO channel
Up to 63 nodes (e.g. CANopen bus modules) on a single bus. With this, up to 252 frequency inverters
can be operated on a single bus by means of gateway.
Support of 11 bit and 29 bit identifiers by the technology modules
Supports DS-301 communications profile and DS-402 drive profile for “Velocity Mode” (with
Technology Units)
Programming of all frequency inverter parameters using SDO
Dynamic PDO mapping (5 TxPDOs and 5 RxPDOs) for great reduction in the number of parameters
Heartbeat and node-guarding monitoring functionality
Interface (RS232/RS485) for parameter access by means of the SK PAR-3H manual control unit or
NORDCON software via RJ12 connector (Except for SK CU4-CAO. Here parameter access via the
SK 200E frequency inverter is possible)
Integrated EEPROM with extensive bus-specific parameter database with parameter editing facilities via:
- ParameterBox and Nordcon: direct access / direct saving
- CANopen Bus Saving via - Index 0x1010 sub0 Store Parameters,
- Index 0x1011 sub0 Restore default Parameters
Available as versions for installation in the inverter (IP20) or in a separate housing (optionally IP55 / IP66)
1.2 Delivery
Check the equipment immediately after delivery/unpacking for transport damage such as deformation or
loose parts.
If there is any damage, contact the carrier immediately and implement a thorough assessment.
Important! This also applies even if the packaging is undamaged.
10 Subject to technical amendments BU 0260 GB
Page 11

1 General information
1.3 Scope of supply
Standard version: SK CU4-CAO IP20 or
SK TU4-CAO(-M12)(-C)
Operating instructions as PDF file on CD ROM
including NORD CON, (Windows PC-based parameterisation software)
Available accessories
SK TIE4-WMK-TU, wall-mounting kit TU4
M12 round plug connector (Section 8.2 "Cable glands and shielding connections")
Matching RJ12 to SUB-D9 adapter cable to connection to a PC
ParameterBox: SK PAR-3H, plain text LCD display
: SK TI4-TU-BUS(-C) (bus connection unit, required for SK TU4…)
IP55 (optionally IP66)
1.4 Certifications
1.4.1 European EMC Directive
If the NORDAC SK 200E is installed according to the recommendations in
this instruction manual, it meets all EMC directive requirements, as per the
EMC product standard for motor-operated systems EN 61800-3. (see also
Section 8.1.3 , "Cable layout and shielding (EMC measures)")
1.4.2 RoHS compliance
SK 200E series frequency inverters are designed to be RoHS compliant
according to Directive 2002/95/EEC
BU 0260 GB Subject to technical amendments 11
Page 12

Supplementary Manual CANopen for NORDAC SK 20E
1.5 Type code / Optional BUS modules
BUS = Bus module or I/O extension
SK TU4-CAO (-C-M12-WMK-TU)
Wall-mounting kit: for external technology units TU4
M12 system connectors: only TU4, alternative to terminals
IP protection class: Standard = IP55, C = “coated” IP66
Option type: CAO = CANopen, PBR = Profibus,
DEV = DeviceNet, IOE = I/O-extension
Option series: TU4 = external Technology Unit
CU4 = internal customer unit
(...) Options, only implemented if required
Optional external
technology unit, SK TU4-...
Optional internal
customer unit, SK CU4-…
12 Subject to technical amendments BU 0260 GB
Page 13

1 General information
1.6 Version with protection class IP55 / IP66
NORDAC SK 200E frequency inverters and the external additional modules are available in all sizes
and powers in the protection classes IP55 (standard) or IP66 (optional).
The protection class IP66 must
There are no restrictions or differences to the scope of functions in either protection class. In order to
differentiate the protection classes, modules with protection class IP66 are given an extra “-C” (coated
coated PCBs) in their type designation.
IP55 version
:
The IP55 version of the external technology units is the standard version. Both versions (inverter-mounted
– as a supplement to the frequency inverter or wall mounted on the wall bracket) are available.
IP66 version
:
In contrast to the IP55 version the IP66 version is a modified option. With this design, both versions
(inverter-mounted or wall-mounted) are also available. The modules available for the IP66 version (adapter
units, technology units and customer units) have the same functionalities as the corresponding modules for
the IP55 version.
NOTE
always be stated when ordering!
e.g. SK TU4-CAO-C
The modules for the IP66 design are identified by an additional "-C" and are modified
according to the following special measures!
Special measures:
Impregnated PCBs, painted housing
Diaphragm valve for pressure compensation on temperature changes.
Low pressure test
A free M12 screw connection is required for low pressure testing. After successful testing, a
diaphragm valve is inserted here. This screw connections is therefore no longer available
for a cable gland.
NOTE
For all versions, care must be taken that the cable and the cable gland are carefully
matched. This is essential to ensure that the required protection class is maintained.
BU 0260 GB Subject to technical amendments 13
Page 14

Supplementary Manual CANopen for NORDAC SK 20E
2 Assembly and installation
2.1 Installation and assembly
Internal and external technology modules designed for NORDAC SK 200E series are available for CANopen.
Except for the number of digital inputs and outputs, the functionalities of the various CANopen modules are
identical.
These are used to connect SK 200E series speed regulated drive units to overriding automation systems via
the CANopen field bus. Both the SK 200E frequency inverters and the external technology units are available
in the protection classes IP55 (standard) and IP66 (optional). The type designation for the IP 66 protection
class of the SK 200E and its modules is given an additional code "-C" (coated → coated board) to differentiate
the IP55 and IP66 protection classes.
SK TI4-… with integrated technology unit
SK CU4-…
SK 200E with external technology unit
SK TU4-… and BUS connection module
SK TI4-TU-BUS
SK TIE4-WMK-TU with BUS connection
module SK TI4-TU-BUS and external
technology unit SK TU4-… or SK TU4-…-M12
The internal
technology modules (Customer Unit, SK CU4-...) – designated as the customer unit – are
integrated into the connection unit of the SK 200E. The electrical connection to the SK 200E is made via the
internal system bus. The connection to external peripheral devices is made via screw terminals. The use of the
optionally available 4 or 5 pin M12 round plug connector, installed in the connection unit of the SK 200E,
provides a possible interface for connection to the field bus. A maximum of one customer interface (including
any 24V module) can be installed in the SK 200E frequency inverter.
Optional internal
customer units, SK CU4-…
14 Subject to technical amendments BU 0260 GB
Page 15

2 Assembly and installation
The external technology modules (Technology Unit, SK TU4-...) – designated as the technology unit – are
externally attached to the SK 200E connection unit and are therefore easy to access. Mounting of the SK TU4... separate from the frequency inverter is possible by means of the wall mounting kit SK TIE4-WMK-TU. The
electrical connection to the SK 200E is made via the internal system bus. 4 or 5 pin M12 round plug
connectors (for installation in the BUS connection unit SK TI4-TU-BUS) are available as an option for
connection of the field bus cable. The external modules are also available as a version with integrated M12
round plug connectors (SK TU4-xxx-M12). These enable the connection of up to 4 digital inputs and 2 digital
outputs.
Optional external
technology unit, SK TU4-…
NOTE
Modules should not be inserted or removed unless the device is free of voltage. The slots
may only
Mounting of the external technology unit remote from the frequency inverter is possible
with the additional wall-mounting kit (SK TIE4-WMK-TU). However, a maximum cable
length of 30m should not be exceeded.
The external technology units (SK TU4-...(-M12) cannot be operated without the BUS
connection unit (SK T14-TU-BUS)!
be used for the intended modules.
NOTE
Only one technology unit (SK CU4-... or SK TU4-...) can be connected to a system bus.
BU 0260 GB Subject to technical amendments 15
Page 16

Supplementary Manual CANopen for NORDAC SK 20E
2.1.1 Overview of the CANopen modules
Bus Module Description Data
Supported profiles:
CiA DS-301 and CiA DSP-402
CANopen Module
SK CU4-CAO
Part No. 275271001 (IP20)
CANopen module*)
SK TU4-CAO(-C)
Part No. 275281101 (IP55)
Part No. 275281151 (IP66)
Similar to illustration
This option enables control of the NORDAC SK
200E via CANopen.
This option is integrated into the connection unit of
the frequency inverter.
This option enables control of the NORDAC SK
200E via CANopen.
This option is installed externally to the frequency
inverter.
According to the installation location, at least one
"BUS connection unit"* is required.
baud rate:
up to 1 MBaud
Connection:
16-terminal screw terminal bar
2x digital inputs:
Low: 0-5V, High: 11-30V
System bus
Supported profiles:
CiA DS-301 and CiA DSP-402
baud rate:
up to 1 MBaud
Connection:
36 pin spring terminal bar of the
“BUS connection unit”*
4x digital inputs:
Low: 0-5V, High: 11-30V
2x Digital outputs:
0/24V
System bus
CANopen module with
*)
M12
SK TU4-CAO-M12(-C)
Part No. 275281201 (IP55)
Part No. 275281251 (IP66)
This option enables control of the NORDAC SK
200E via CANopen.
This option is installed externally to the frequency
As for SK TU4-CAO, but with
additional:
6x M12 socket for the connection
of up to 4 sensors and 2
actuators via 5 pin M12 round
plug connectors (A coded)
inverter.
According to the installation location, at least one
"BUS connection unit"* is required.
Connection unit for TU4
SK TI4-TU-BUS
Part No. 275280000 (IP55)
Part No. 275280500 (IP66)
The connection unit is always required in order to
use an external technology unit (SK TU4-...). This
Connection:
36 pin spring terminal bar
36x 2,5mm
2
AWG 26-14
spring terminals
implements the connection of the technology unit to
the SK 200E or the wall-mounting kit.
TU4 Wall-mounting kit
SK TIE4-WMK-TU
Part. No. 275274002
With the wall mounting kit, a technology unit can be
used/installed separately from the SK 200E.
*)
in order to use the TU4 modules, a suitable SK TI4-TU-BUS connection unit must always be available!
16 Subject to technical amendments BU 0260 GB
Page 17

2 Assembly and installation
2.1.2 Installing the Customer Unit SK CU4-CAO
WARNING
The installation of customer units is carried out in the connection unit SK T14-… SK 200E underneath the
control terminal bar. Fastening is by means of the terminal bar of the frequency inverter and two M4x20 screws
(bag enclosed with the customer unit). Only one customer unit per FI is possible!
The pre-assembled cables for connection to the frequency inverter (SK 200E) are also included in the bag
enclosed with the customer unit. Connections are made according to the following table:
Installation must be carried out by qualified personnel only, paying particular attention to
safety and warning instructions.
Modules must not be inserted or removed unless the device is free of voltage. The slots
may only
Installation of the SK CU4-... customer unit remote from the frequency inverter is not
permitted. This must be installed in the immediate vicinity of the SK 200E frequency
inverter.
be used for the intended modules.
SK TI4-… with integrated technology unit
SK CU4-CAO
Function Terminal label Cable colour
Power supply
(between frequency inverter and customer unit)
System bus
NOTE
Similar to illustration
Customer unit SK CU4-CAO Bag enclosed with internal customer unit
44
40
77
78
Set the termination resistors of the system bus!
(See Section 2.2.3 "Configuration")
24V brown
GND blue
SYS+ black
SYS- grey
BU 0260 GB Subject to technical amendments 17
Page 18
Supplementary Manual CANopen for NORDAC SK 20E
2.1.3 Installing the SK TU4-CAO Technology Unit
WARNING
Together with the BUS connection unit SK TI4-TU-BUS(-C) the technology unit SK TU4-CAO-…(-C) forms a
stand-alone functional unit. This can be attached to the SK 200E frequency inverter or installed separately by
means of the optional SK TIE4-WMK-TU wall-mounting kit.
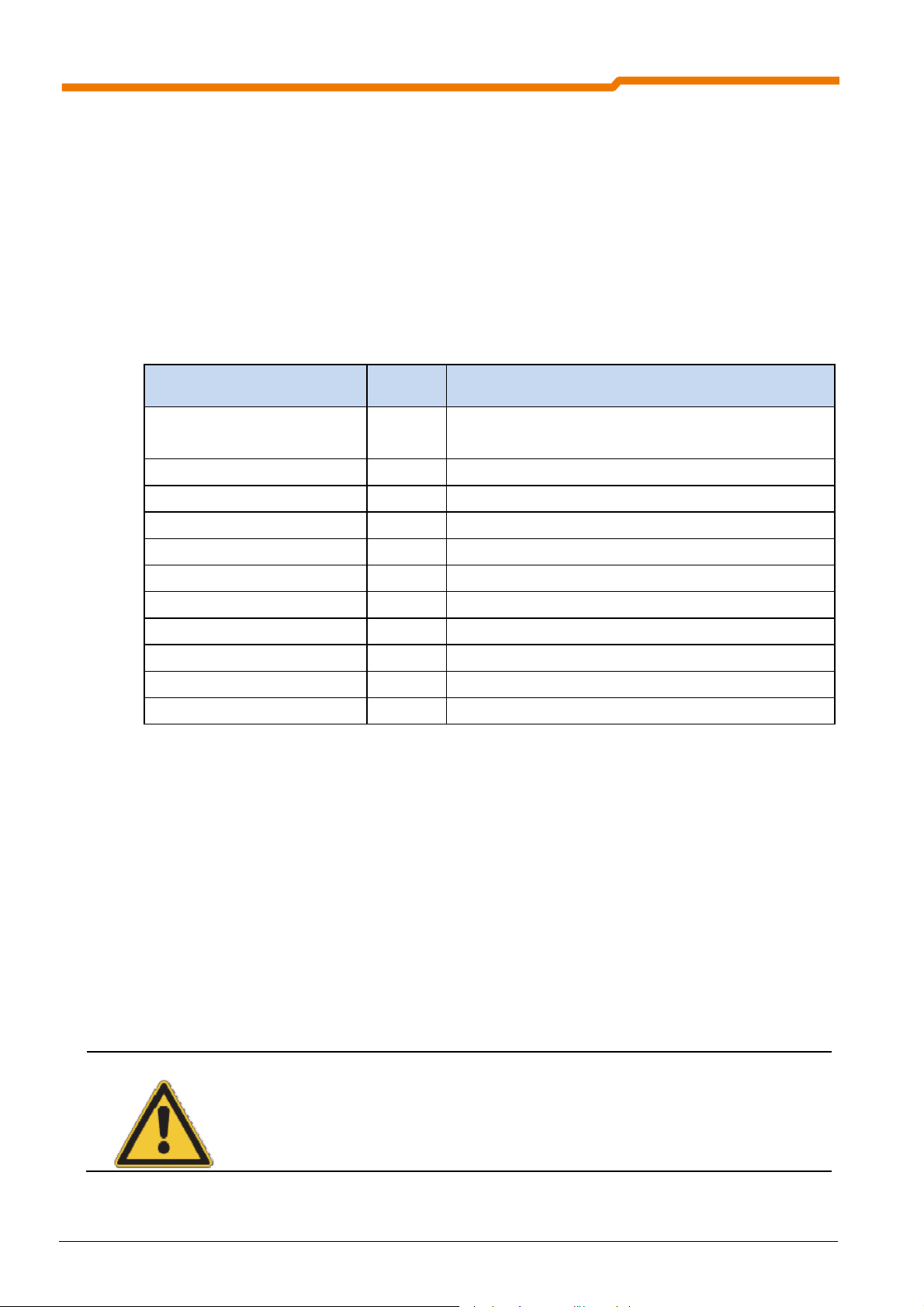
2.1.3.1 Dimensions of the SK TI4-WMK-TU wall-mounting kit
The optional wall-mounting kit has the following dimensions.
Installation must be carried out by qualified personnel only, paying particular attention to
safety and warning instructions.
Modules must not be installed or removed unless the device is free of voltage. The slots
may only
Mounting of the external technology unit remote from the frequency inverter is possible
with the additional wall-mounting kit
be used for the intended modules.
(SK TIE4-WMK-TU).
136
58
Wall-mounting kit SK TI4-WMK-TU
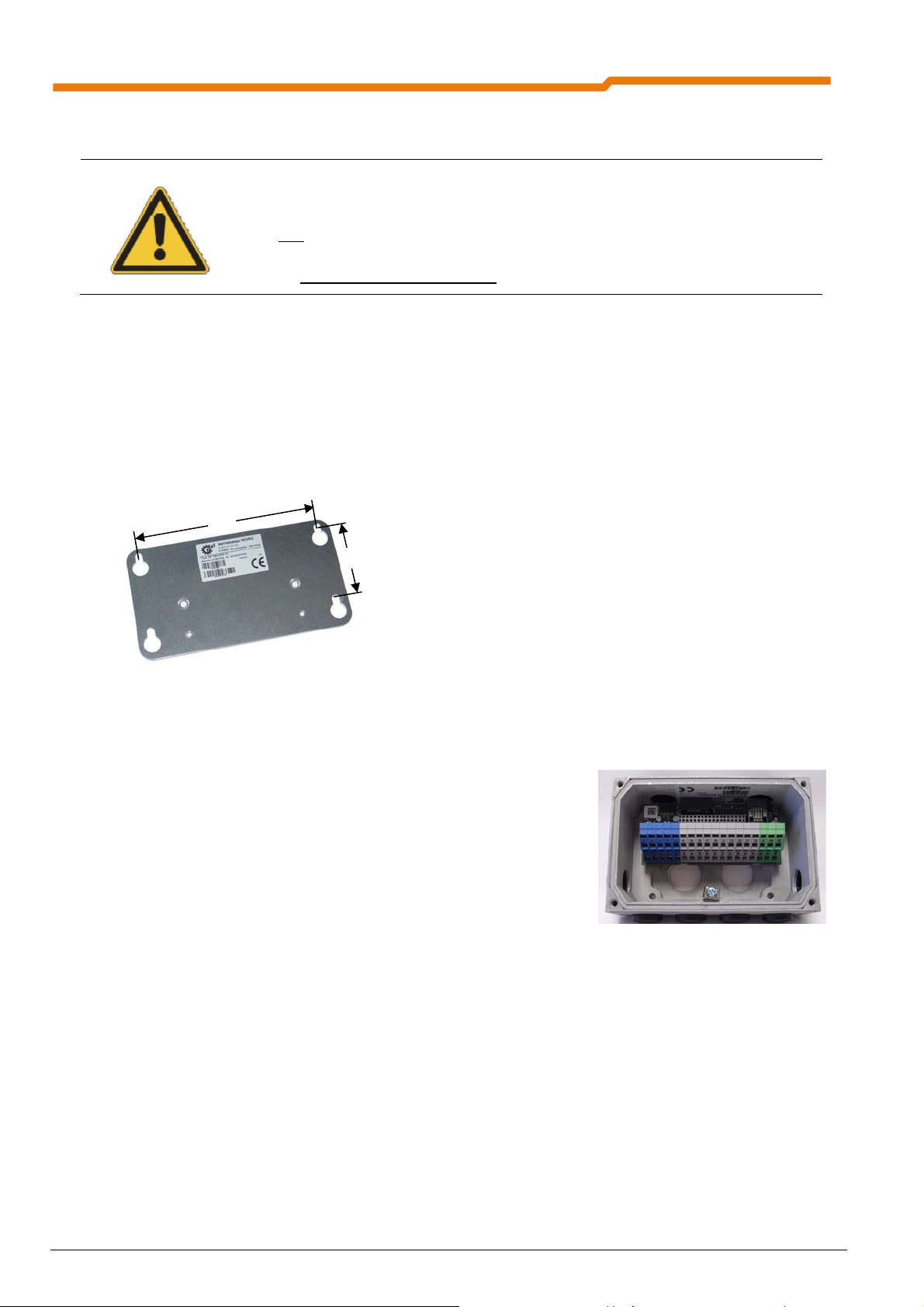
2.1.3.2 BUS connection unit SK T14-TU-BUS(-C)
Various cable glands closed by caps are located on the sides of the BUS
connection unit.
The following holes are available as cable inlets:
2 x 1 M20 x 1.5 (on sides)
4 M20 x 1.5 (underside)
2 M25 x 1.5 (rear side, without caps)
External BUS connection unit = SK TI4-TU-BUS
The transparent screw-on cover (M20 x 1.5) on the upper right serves as access to the diagnostic interface
(RJ12 socket, interface RS232/RS485). The upper left screw-on cover is not used.
18 Subject to technical amendments BU 0260 GB
Page 19

2 Assembly and installation
2.1.3.3 Mounting the SK T14-TU-BUS on the SK 200E
The screw fittings and seals required for installation are enclosed with the modules or are fitted to the intended
locations.
Mounting of the technology unit on the SK 200E
must be carried out as follows:
1. Switch off the mains.
2. Remove the two M25 caps on the required side
of the frequency inverter (right / left).
3. Remove the printed circuit board (with terminal
bar) from the BUS connection unit.
4. Install the SK T14-TU-BUS (with adhered seal)
on the SK 200E using the 4 enclosed bolts.
5. Replace the printed circuit board (See point 3)
and carry out the electrical connections.
6. Fit and screw on the SK TU4 module.
Mounting the external technology unit on the SK 200E
Wall-mounting kit SK TI4-WMK-TU
2.1.3.4 Wall-mounting the SK TI4-TU-BUS
The screw fittings (except for anchoring screws) and
seals required for installation are enclosed with the
modules or are fitted to the intended locations.
The connecting cable between the technology unit
and the SK 200E should not be longer than 30m.
1. Mount the SK T14-TU-BUS connecting unit with
adhered seal
on the wall-mounting kit. To do this:
Insert the 2 x cheese-head screws (enclosed with
wall-mounting kit) into the (countersunk) holes
from the outside and with the 2 x bolts (enclosed
with the wall-mounting kit) securely screw both
components together from the inside (BUS
connection unit).
Wall-mounting kit SK TI4-WMK-TU with field bus technology unit
2. Make a suitable cable connection between the technology unit and the frequency inverter. Take care that
there is appropriate screw fitting and sealing of the modules. The cable sets enclosed with the BUS
connection unit are not used.
3. Fit and screw on the SK TU4 module.
BU 0260 GB Subject to technical amendments 19
Page 20

Supplementary Manual CANopen for NORDAC SK 20E
2.2 Electrical connection
WARNING
THE DEVICES MUST BE EARTHED.
Safe operation of the devices presupposes that qualified personnel install and commission it in
compliance with the instructions provided in these operating instructions.
In particular, the general and regional mounting and safety regulations for work on high voltage
systems (e.g. VDE) must be complied with as must the regulations concerning professional use of
tools and the use of personal protection equipment.
Dangerous voltages can be present at the motor connection terminals of the frequency inverter
even when the inverter is switched off. Always use insulated screwdrivers on these terminal fields.
Ensure that the input voltage source is not live before setting up or changing connections to the
unit.
Make sure that the inverter and motor are specified for the correct supply voltage.
2.2.1 Cable glands
Both the SK 200E connection unit and the bus module provide extensive facilities for the connection of all the
required cables. The cables may enter the housing via cable glands and be connected to the terminal bar.
However, appropriate round plug connections (e.g.: M12 round plug connectors in M16 cable glands) may be
fitted in order to provide a plug-in solution.
Incoming cable, fixed
connection e.g. for system
bus or 24V supply
Cable gland for system bus cable pair
and 24V supply for direct attachment
to SK 200E
No function,
do not use
M16 cable gland or installation of M12 round plug connection for:
incoming and outgoing CANopen cables
24V and 24V (for DO) supply
System bus
I/O peripherals: sensors and actuators
Diagnostic access
RJ 12 socket
Outgoing cable, fixed
connection e.g. for system
bus or 24V supply
Cable gland for system bus cable pair
and 24V supply for direct attachment
to SK 200E
Example:
cable gland on BUS connection unit
SK TI4-TU-BUS
20 Subject to technical amendments BU 0260 GB
Page 21

2 Assembly and installation
2.2.2 Control connections
The CANopen modules must be provided with a 24V DC (±20%, 100mA) control voltage. Wire end sleeves
must be used for flexible cables.
Designation Data
Rigid cable cross-section 0.14 … 2.5mm²
Flexible cable cross-section 0.14 … 1.5mm²
AWG standard AWG 26-14
Tightening torque (for screw terminals) 0.5…0.6Nm
Within the terminal box (unshielded cable section) the data cables (e.g. CANopen, system bus) must be
installed as short as possible and of equal length. Associated data cables (e.g.: Sys+ and Sys-) must be
twisted.
NOTE
Due to the separated potential levels of the system bus and the field bus (CANopen), both
bus systems must have a separate supply (24V).
NOTE
In the customer unit, the CAN open is already installed with voltage isolation from the other
signal connections.
In case of EMC problems, voltage separation of the field bus supply, the digital inputs and
system bus interface and for the external technology unit also for the two additional digital
outputs should be provided.
NOTE
The cable shielding must be connected to the functional earthing
electrically conducting mounting plate) in order to prevent EMC interference in the
device.
In order to achieve this, for CANopen connections it is mandatory that the metallic metric
EMC screws are used for the connection of the CANopen shielding lead to the frequency
inverter or the housing of the technology unit. This ensures a wide area connection of the
functional earthing.
1
(usually the
1
In systems, electrical equipment is usually connected to a functional earth. This serves as a means to dissipate leakage
and interference currents in order to ensure EMC characteristics and must therefore be implemented according to high
frequency technology aspects.
BU 0260 GB Subject to technical amendments 21
Page 22

Supplementary Manual CANopen for NORDAC SK 20E
v
2.2.2.1 Control connections SK CU4-CAO
The terminal bar of the customer unit SK CU4-CAO is divided into two potential levels.
24V
GND
Connection of the 24V power
supply from the SK 200E
Sys +
Sys -
System bus connection
from the SK 200E
Potential level: System bus
CANopen+
CANopen-
GND B
SHLD
24V B
CANopen-
GND B
Potential le
Incoming CANopen
cable
Outgoing CANopen
cable
Connection to
terminal bar of SK CU4-CAO
Connection of up to 2 sensors is made on the terminal bar (terminals C1 and C2).
NOTE
In principle, looping of the 24V supply voltage (terminals 45/46) or also (terminals 44/40)
is possible, however a maximum permissible current of 2A must not be exceeded with the
SK CU4-CAO
el: Field bus
22 Subject to technical amendments BU 0260 GB
Page 23

Control connection details
Terminal/
Designation
4424V External 24V supply
40 GND
Function
(system bus)
Reference potential
for digital signals
2 Assembly and installation
Data Description / wiring suggestion Parameter
24VDC ±20%
≈ 50mA
reverse polarity protected
max. permissible current
load: 2A
External supply voltage of the
system bus and supply of the
digital inputs (DIN1 and DIN2)
-
-
C1 DIN1 Digital input 1
[I/O CANopen DIN1]
C2 DIN2 Digital input 2
[I/O CANopen DIN2]
77 Sys+
System bus
data cable +
78 Sys-
40 GND
System bus
data cable -
Reference potential
for digital signals
45 24V Bus
24V bus supply
voltage
(field bus)
75 CANopen+
(incoming)
76 CANopen-
(incoming)
Bus +
CAN H
Bus -
CAN L
46 GND Bus Data ground bus
90 SHLD Bus shield
Low 0V ... 5V
High 15V ... 30V
Ri = 8.1k
Input capacitance 10nF
Scan rate 1 ms
Each digital input has a reaction
time of 1ms.
Inputs as per
EN 61131-2 Type 1
P174
P174
-
System bus
interface
-
-
Potential isolation
For CANopen - Bus
24VDC ±20%
≈ 50mA, reverse polarity
protected
Version to terminal 44 electrically
insulated.
CANopen bus supply essential
-
-
The use of twisted, shielded two-
RS485 transfer
conductor cable is highly
recommended
-
Bus reference potential
Version to terminal 40 electrically
-
isolated.
-
45 24V Bus
24V bus supply
voltage
See above (Terminal 45).
Version to terminal 44 electrically
insulated.
-
CANopen bus supply essential
75 CANopen+
(outgoing)
76 CANopen-
(outgoing)
46 GND Bus Data ground bus
Bus +
CAN H
Bus -
CAN L
RS485 transfer
The use of twisted, shielded twoconductor cable is highly
recommended
BUS reference potential
Version to terminal 40 electrically
-
-
-
isolated.
BU 0260 GB Subject to technical amendments 23
Page 24

Supplementary Manual CANopen for NORDAC SK 20E
2.2.2.2 Control connections of the SK CU4-CAO(-...)
The double spring-loaded terminal bar of the technology unit is colour coded, and therefore indicates the
three different potential levels.
A separate power source should be used particularly for the supply of the DOs. However, by bridging the
24V o
and GND o to one of the terminals of the system bus level (24V and GND) it is possible to implement
the supply of the DOs. However, in this case it should be noted that there is an increased risk of introducing
interference into the bus cables.
Connection of up to 4 sensors and 2 actuators is made via the terminal bar. Alternatively
, the SK
TU4-CAO-M12 enables the connection of these I/Os via the M12 round plug connector (5 pin socket, A-coded)
mounted on the front.
Double use of the inputs via the terminal bar and
Potential level: field bus Potential level: system bus Potential level: DOs
field bus level
System bus level and digital inputs Digital outputs
the M12 round plug connector must be avoided.
CANopen
24V-B
CAO+
CAO-
CAO
IN
GND B
IN
SHLD 24V 24V
CAO
GND GND DIN 1 GND 24V
(as 11)
DIN 2 GND 24V
(as 11)
(as 11)
24V O
DO
DO 1 GND O
DO
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36
24V-B
CAO+
CAO-
CAO
OUT
GND B
CAO
OUT
PE 24V
(as 11)
Sys + Sys - GND DIN 3 GND 24V
(as 11)
DIN 4 GND 24V
Illustration of the terminal bar of the bus connection unit
SK T14-TU-BUS with allocation of functions
(as 11)
GND O
DO
DO 2 GND O
DO
Connection example: SK TU4-CAO to SK 200E
Voltage
source
24V DC
CANopen
subscriber
X-1
SK205E… - connection unit (SK TI4...)
SK TU4-CAO… - connection unit (SK TI4-TU-BUS)
Voltage
source
24V DC
CANopen
subscriber
X+1
NOTE
In principle, looping of the 24V supply voltage (terminals 1/2) or also e.g.: (terminals 11/15)
is possible, however a maximum permissible current load of 3A for the
SK TU4-CAO(-…)must not be exceeded.
24 Subject to technical amendments BU 0260 GB
Page 25

Control connection details
Terminal/
Designation
1 24V BUS
(CAO)
2
3 CANopen+
(incoming)
4
(outgoing)
5 CANopen-
(incoming)
6
(outgoing)
7 GND BUS
8
9 SHLD Bus shield
Function
External 24V bus
supply
(field bus)
Bus +
CAN H
Bus -
CAN L
Data ground bus
2 Assembly and installation
Data Description / wiring suggestion Parameter
24VDC -/+20%
≈ 50 mA
reverse polarity protected
Max. permissible current
Supply voltage for the CANopen
controller / field bus
-
load: 3A
-
The use of twisted, shielded two-
RS485 transfer
conductor cable is highly
recommended
-
-
-
10 PE PE bus
1124V
External 24V supply
(system bus)
12
13
14 Sys+
System bus
data cable +
15 GND
16 Sys-
17 GND
Reference potential
for digital signals
System bus
data cable -
Reference potential
for digital signals
18
19 DIN1 Digital input 1
[I/O CANopen DIN1]
20 DIN3 Digital input 3
[I/O CANopen DIN3]
-
Potential isolation
24VDC -/+20%
≈ 50 mA
reverse polarity protected
Version to terminal 1 electrically
insulated.
CANopen bus supply (essential)
-
Max. permissible current
load: 3A
System bus
interface
-
External supply voltage for system
bus and digital inputs (DIN1 to
DIN4)
-
System bus
interface
-
External supply voltage for system
bus and digital inputs (DIN1 to
DIN4)
-
Low 0V ... 5V
High 15V ... 30V
R
= 8.1k
i
Input capacitance 10nF
Scan rate 1 ms
Each digital input has a reaction
time of 1ms.
Inputs as per
EN 61131-2 Type 1
P174
P174
21 GND
Reference potential
for digital signals
External supply voltage for system
bus and digital inputs (DIN1 to
DIN4)
-
22
BU 0260 GB Subject to technical amendments 25
Page 26

Supplementary Manual CANopen for NORDAC SK 20E
Terminal/
Designation
23 24V
24
25 DIN2 Digital input 2
26 DIN4 Digital input 4
Function
External 24V supply
[I/O CANopen DIN2]
[I/O CANopen DIN4]
Data Description / wiring suggestion Parameter
As for terminal 11 -
Low 0V ... 5V
High 15V ... 30V
R
= 8.1k
i
Input capacitance 10nF
Scan rate 1 ms
Each digital input has a reaction
time of 1ms.
Inputs as per
EN 61131-2 Type 1
P174
P174
27 GND
28
29 24V
30
31 24V o
32 GND o
33 DO1 Digital output 1
34 DO2 Digital output 2
35 GND o
36
Reference potential
for digital signals
External 24V supply
External 24V supply
for the DOs
Reference potential
for digital signals
[I/O CANopen DO1]
[I/O CANopen DO2]
Reference potential
for digital signals
As for terminal 11 -
Potential isolation
24VDC -/+20%
Up to 1A, according to
load
reverse polarity protected
Low = 0V
High: 24V
Rated current: 500mA
each
Details of the M12 connections of the SK
TU4-CAO-M12
The special wiring of the M12 round plug connector
enables the connection of both single and double
sensors, which are equipped with normal M12
system connectors in the standard sensor/actuator
configuration.
With the use of M12 round plug connectors, the
terminal bar connectors
for the digital inputs
(Terminals 19, 20, 25, 26) must not be used.
External supply voltage for system
bus and digital inputs (DIN1 to
DIN4)
External supply voltage for digital
outputs (DO1 and DO2)
If necessary, bridge to 24V terminal
External supply voltage for digital
outputs (DO1 and DO2)
If necessary, bridge to GND
terminal
The digital outputs should be used
with a separate 24V supply
External supply voltage for digital
outputs (DO1 and DO2)
If necessary, bridge to GND
terminal
-
-
-
P150
P175
P150
P175
-
Illustration of wiring of M12
connector to SK TU4-...-M12
26 Subject to technical amendments BU 0260 GB
Page 27

2 Assembly and installation
2.2.3 Configuration
The configuration for all CANopen module versions is identical. All necessary settings are made using the
hardware via a DIP- switch element (3+8- part switching block).
Similar to
illustration
Customer unit SK CU4-CAO Technology unit SK TU4-CAO
BUS termination Addressing
DIP switch 3 + 8 part
Addressing
Note:
CANopen address: setting only
via DIP switch in binary code
Address range: 1 … 63
Address changes: only become effective after switching the BUS module off and on again
NOTE
If an application-specific configuration has been saved (memory object 1010
initialisation is not active after default mapping. In order to apply the new module ID
settings, the configuration must be reset to the factory settings (Parameter (P152) or
(Object 1011
)) (See Section 4.7 “Saving the parameters”).
hex
), the
hex
Termination resistor
The termination of the BUS system at both of its physical ends is carried out by connecting the relevant
termination resistors (DIP switch).
CANopenmodule(viewofDIPswitch) SK 200E(internalview)
termination resistor
System bus
e.g.:SKCU4‐CAO e.g.:SK200E
BU 0260 GB Subject to technical amendments 27
Field bus (CANopen)
termination resistor
System bus
termination resistor
Page 28

Supplementary Manual CANopen for NORDAC SK 20E
Baud rate
The baud rate is set in binary code via two DIP
switches (only applies to field bus level).
Setting Baud rate DIP2 DIP1
1 125 kBaud OFF OFF
2 250 kBaud OFF ON
3 500 kBaud ON OFF
4 1 MBaud ON ON
CANopen baud rate
E.g.:SKCU4‐CA O
Configuration example
A CANopen subscriber SK TU4-CAO is connected to an SK 200E series frequency inverter via a BUS
connection unit SK T14-TU-BUS. The field bus address (CANopen address / identifier) is to be "14". The
CANopen subscriber is not a final subscriber. The system bus only includes the frequency inverter and the
CANopen module. The termination resistor for the system bus is to be set at the frequency inverter. The DIP
switches on the CANopen module must be set as follows:
Area Significance
Identifier-bit 5
Identifier-bit 4
Identifier-bit 3
Identifier-bit 2
Addressing
rate
Baud
Identifier-bit 1
Identifier-bit 0
Baud rate-bit 1
Baud rate-bit 0
DIP switch
No.
8
7
6
5
4
No. 647
DIP switch
3
2
1
2
2
2
2
2
2
2
2
5
4
3
2
1
0
1
0
DIP Switch
ON - OFF
Configuration
example
0
0
8
4
2
0
0
0
Example address =
14
Baud rate =
125kBaud
3
2
No. 802
1
-
-
OFF
ON
BUS
termination
No significance
CANopen
System bus
DIP switch
28 Subject to technical amendments BU 0260 GB
Page 29

3 Displays and diagnosis
3 Displays and diagnosis
Various diagnosis possibilities are available, depending on the device. Operating conditions or errors are
visualised by means of LEDs. PC-based communication or the connection of a parameterisation unit is
possible via an RS232 interface (RJ12 diagnostic socket).
RJ12
LEDs
Potentiometer
Similar to illustration
CANopen module SK CU4-CAO
status LEDs
CANopen module unit SK TU4-CAO-M12 with
SK TI4-TU-BUS and SK TIE4-WMK-TU
Status LEDs and viewing window (transparent
screw-on cover) for RJ12 diagnostic interface
Similar to illustration
Frequency inverterSK 200E
viewing window (transparent screw-on cover) for
diagnostic interface RJ12, status LEDs,
potentiometer
3.1 LED displays
Both the SK 200E frequency inverter and the CANopen modules provide LED status and diagnostic displays to
indicate the various statuses.
A differentiation into 3 categories is made
Module or module-specific displays (S and E or DS and DE)
CANopen-specific displays (CR and CE)
Status displays for the additional digital I/Os of the module (D1/2 or DI1...4 and DO1/2)
The possible displays differ according to the device.
3.1.1 Device-specific display versions
3.1.1.1 SK 200E frequency inverter
LED S/E
The double LED S/E
frequency inverter by change of colour and different flashing
frequencies. A device error is indicated by cyclic red flashing
of the LED. The frequency of the flashing signals
corresponds to the error number (Manual BU 0200).
LEDs BS and BE
The dual LEDs BS
indicate the status of the system bus communication module.
Various bus communication errors are indicated by means of
different flashing frequencies.
A detailed description of the LED displays of the frequency
inverter can be found in the main manual (BU0200).
BU 0260 GB Subject to technical amendments 29
RJ12
indicates the operating status of the
LEDs
Potentiometers
(BUS State) and BE (BUS Error)
Page 30

Supplementary Manual CANopen for NORDAC SK 20E
3.1.1.2 Customer unit SK CU4-CAO
LEDs CR and CE
The single-colour LEDs CR
(CANopen RUN) and CE
(CANopen ERROR) indicate the CANopen communication
status.
LEDs DS and DE
The dual colour LEDs DS
Error) indicate the status of the module and the status of the
(Device State) and DE (Device
Similar to illustration
system bus.
LEDs D1 and D2
The single colour LEDs D1
(DIN 1 (Digital input 1)) and D2 (DIN 2 (Digital input 2)) indicate the signal status of
the digital inputs of the CANopen module. The corresponding LED lights up in case of a High signal.
A detailed description of the LED displays for this module can be found in Section 3.1.2 "Signal status LEDs".
3.1.1.3 Technology unit SK TU4CAO(-M12)
LEDs CR and CE
The single-colour LEDs CR
(CANopen RUN) and CE
(CANopen ERROR) indicate the CANopen communication
status.
LEDs DS and DE
The dual colour LEDs DS
(Device State) and DE (Device
Error) indicate the status of the module and the status of the
system bus.
LEDs DI1 to DI4 and DO1 and DO2
The single colour LEDs DI1
(DIN 1 (digital input 1)) to DI4 (DIN 4 (digital input 2)) and DO1 (DOUT 1 (digital
output 1) and DO2 (DOUT 2 (digital output 2)) indicate the signal status of the digital inputs- or outputs of the
CANopen module. The corresponding LED lights up in case of a High signal.
These LEDs are only available in the CANopen module SK TU4-CAO-M12
.
A detailed description of the LED displays for this module can be found in Section 3.1.2 "Signal status LEDs".
30 Subject to technical amendments BU 0260 GB
Page 31

3 Displays and diagnosis
3.1.2 Signal status LEDs
This manual only describes the LED signal statuses of the CANopen modules. Information for the frequency
inverter LEDs (SK 200E) can be found in the relevant manual (BU0200).
The statuses indicated by the LED can be read out with the aid of a parameterisation tool from Getriebebau
Nord (NORDCON software ParameterBox) and also of course via the information parameter (P173) “Module
Status” (See Section 5.2.3 "BUS module information parameters, general (P170)").
3.1.2.1 Module-specific displays
The status of the technology unit or the system bus is indicated by the LEDs DS and DE.
LED (green)
DS
Device State
OFF OFF Technology unit not ready, no control voltage
ON
ON
Flashing 0.5s OFF Technology unit ready and at least one further subscriber is connected
Flashing 0.5s Flashing 0.25s
Flashing 0.5s Flashing 0.25s
Flashing 0.5s Flashing 0.25s
Flashing 0.5s Flashing 0.25s
OFF Flashing 0.25s
LED (red)
DS
Device Error
OFF Technology unit ready, no error, at least one frequency inverter is
Flashing 0.25s
Flash interval
1 x - 1s pause
Flash interval
2 x - 1s pause
Flash interval
3 x - 1s pause
Flash interval
4 x - 1s pause
Flash interval
1…7 x - 1s pause
Significance
... Slow flashing = 2Hz (0.5s cycle)
… Rapid flashing= 4Hz (0.25s cycle)
communicating via the system bus
Technology unit ready, however
one or more of the connected frequency inverters has a fault status
(see frequency inverter manual)
to the system bus, but
No frequency inverter on the system bus (or connection interrupted)
Address error for one or more system bus subscribers
System bus is in status "Bus Warning"
Communication on system bus interrupted or
no other subscriber present on the system bus
System bus is in status "Bus off" or
the system bus 24V power supply was interrupted during operation
No system bus 24V power supply
(system bus is in status "Bus off")
CANopen error of the technology unit
Details: LED flashing code: CR and CE
(Section 3.1.2.2 „CANopen displays“)
System error, internal program sequence interrupted
EMC interference (observe wiring guidelines!)
Module faulty
BU 0260 GB Subject to technical amendments 31
Page 32

Supplementary Manual CANopen for NORDAC SK 20E
3.1.2.2 CANopen displays
The status of the CANopen module is indicated by the CR and CE LEDs.
CR (CANopen RUN) indicates the status of the CANopen bus status machine.
CR (CANopen ERROR) indicates the status of the CANopen bus state.
Displays of the CANopen bus status machine
LED (green)
CR
CANopen RUN
OFF Module not in operation
ON
Flashing
(simple)
Flashing
(double)
Significance
... Single flashing = (0.2s cycle)
... Double flashing (1.6s cycle, flashing interval 0.2s)
OPERATIONAL
"Normal operation" → complete reference data communication
(PDO communication is "on")
STOPPED
Only NMT communication possible (monitoring and initialisation functions)
PRE-OPERATIONAL
Restricted reference data communication
→ SDO communication is "on"
→ PDO mapping possible
→ PDO communication is "off"
CANopen bus status display
LED (red)
CE
CANopen ERROR
OFF No error
ON
Flashing
(simple)
Flashing
(double)
Significance
... Single flashing = (0.2s cycle)
... Double flashing (1.6s cycle, flashing interval 0.2s)
Bus OFF
Bus Warning
No other subscribers present
No valid ID (DIP switch = 0) (See Section 2.2.3 "Configuration")
Bus error
Wiring faulty
→ Check cable length
→ Avoid spur cables
Timeout
A process data monitoring function has triggered
→ Node-guarding or
→ The time set in parameter (P151) has expired without
new process data being received
Note: The "node-guarding" error is reset by restarting the monitoring (remote).
32 Subject to technical amendments BU 0260 GB
Page 33

3 Displays and diagnosis
3.1.2.3 I/O Displays
The status of additional digital inputs and outputs on the BUS module is indicated by corresponding LEDs
(except for SK TU4-CAO(-C)).
I/O Channel
Customer unit SK CU4-CAO
LED (green)
Digital input 1
D1
Digital input 2
D2
Technology unit SK TU4-CAO-M12(-C)
LED (yellow)
Digital input 1
DI1
Digital input 2
DI2
Digital input 3
DI3
Digital input 4
DI4
Digital output 1
DO1
Digital output 2
DO2
Status display Significance
ON High potential on terminal C1
OFF
ON High potential on terminal C2
OFF
ON High potential on terminal 19 or on M12 socket
OFF
ON High potential on terminal 25 or on M12 socket
OFF
ON High potential on terminal 20 or on M12 socket
OFF
ON High potential on terminal 26 or on M12 socket
OFF
ON High potential on terminal 33 or on M12 socket
OFF
ON High potential on terminal 34 or on M12 socket
OFF
Low potential on terminal C1
Low potential on terminal C2
Low potential on terminal 19 or on M12 socket
Low potential on terminal 25 or on M12 socket
Low potential on terminal 20 or on M12 socket
Low potential on terminal 26 or on M12 socket
Low potential on terminal 33 or on M12 socket
Low potential on terminal 34 or on M12 socket
DI1
DI1
DI2
DI2
DI3
DI3
DI4
DI4
DO1
DO1
DO1
DO1
BU 0260 GB Subject to technical amendments 33
Page 34

Supplementary Manual CANopen for NORDAC SK 20E
3.2 RJ12 Diagnostic socket
All participants which are coupled via a common system bus (field bus module / frequency inverter (up to 4
devices)) can be read out and edited/parameterised via an RJ12 diagnostic socket. This can be either the
diagnostic socket of the frequency inverter or that of the BUS connection units. This provides users with a
convenient facility to perform diagnosis and parameterisation from a central point, without having to access the
particular frequency inverter at its location.
Although the customer unit SK CU4-CAO does not have an RJ12 connection, it can be accessed from any
other subscriber (frequency inverter) on the same system bus.
Terminal/
Designation
Diagnostic access / RJ12, RS485/RS232
Function
Data Description / wiring suggestion Parameter
1 RS485 A
2 RS485 B
Data cable RS485
Baud rate
9600…38400Baud
Termination
resistorR=120
to be set by customer at
the final subscriber.
3 GND
4 232 TXD
5 232 RXD
Reference potential
for BUS signals
Data cable RS232
0V digital
Baud rate
9600…38400Baud
RS48 5_A
RS48 5_B
GND
TXD
RXD
+5V
+24V
RJ12: Pin No. 1 … 6
1: RS485_A
P502
...P513
2: RS485_B
3: GND
6 +24V
24V voltage supply
from FI
24V 20%
4: RS232_TxD
5: RS232_RxD
6: +24V
The bus speed of the diagnostic interface is 38400 baud. Communication is carried out according to the USS
protocol.
NOTE
Simultaneous use of several diagnostic sockets with several diagnostic tools may lead to
errors during communication. Therefore, only one diagnostic socket within a system bus
network should be used.
The ParameterBox SK PAR-3H is available as a diagnostic tool.
The necessary connecting cables are included in the scope of
delivery of the ParameterBox. For a detailed description of use,
please refer to Manual BU0040.
ParameterBox SK PAR-3H
34 Subject to technical amendments BU 0260 GB
Page 35

3 Displays and diagnosis
Alternatively, diagnosis can be performed via a Windows PC with the aid of NORD CON software (available
free of charge from www.nord.com). The necessary connection cable (RJ12 - SUB D9) is available from
Getriebebau Nord GmbH as part number 278910240. If necessary, an interface converter from SUB D9 to
USB2.0 is commercially available.
Terminal/
Designation
Accessory cable (optional) for PC connection
Adapter cable
RJ12 to SUB-D9
Function
... for direct
connection to a PC
with NORD CON
software
Data Description / wiring suggestion Parameter
n.c.
n.c.
GND
TxD
RxT
+24V
Assignment of SUB-D9 connector:
Length 3m
Assignment RS 232
(RxD, TxD, GND)
Part. No. 278910240
Pin2: RS232_TxD
Pin3: RS232_RxD
Pin5: GND
RxD
GND TxD
1 5
9
6
No special settings are required to set up communication with the individual diagnostic tools.
The allocation of addresses is defined via the system bus addressing. The display of the diagnostic tool is
according to the following table, whereby the frequency inverter which is directly connected to the diagnostic
tool is automatically assigned the address “0”
.
Device
External
technology unit
Frequency inverter
with address 36
(system bus)
Frequency inverter
with address 36
(system bus)
Frequency inverter
with address 36
(system bus)
Frequency inverter
with address 36
(system bus)
USS
address
30 1 2 3 4
Note:
Setting of the system bus address is carried out via two DIP
switches (DIP 1 and 2) on the underside of the SK 200Efrequency inverter. For further details, please refer to the
frequency inverter manual (BU 0220). The address of the BUS
module is defined as “30”.
8x DIP switch
Underside of SK 200E
BU 0260 GB Subject to technical amendments 35
Page 36

Supplementary Manual CANopen for NORDAC SK 20E
4 Commissioning
In addition to the electrical connection to the BUS system and the hardware configuration of the nodes,
operation of a frequency inverter in a CANopen network also requires the definition of the various monitoring
functions. For the operation of an SK 200E frequency inverter or the relevant BUS modules (SK xU4-CAO) in a
CANopen network managed by an NMT master, the available objects are saved in an EDS file.
For the devices described in this manual, in addition to various freely configurable monitoring functions,
Getriebebau Nord GmbH also enables pure process data communication (PDO) and communication via
SDOs. With the aid of various parameters of the bus modules, participants can be individually adapted to a
CANopen network. However, for reasons of compatibility the default settings should be retained as far
as possible. For more simple applications the drive profile "Velocity Mode" from device profile DSP402 is
available.
Sections 4.2 to 4.8 contain detailed explanations for the individual commissioning steps. Explanations for
process data and examples are summarised in Section 7 "CANopen data transfer".
4.1 Quick commissioning
The bus modules SK xU4-CAO are designed so that for normal applications no software settings (mapping) on
the BUS module are required for basic operation.
Commissioning therefore comprises the following steps
Installation
Connection
NOTE
(see Section2.1.2 "Installing the Customer Unit SK CU4-CAO" and
Section 2.1.3 "Installing the SK TU4-CAO
(see Section 2.2 "Electrical connection")
Technology Unit")
If possible, a separate 24V power supply should be used for each potential level (system
bus, field bus, DOs) in order to minimise interference on the bus cables.
Configuration (addressing and bus termination - via DIP switches) -
(see Section 2.2.3 "Configuration")
Integration of the EDS file into the control unit.
After connection of the 24V supply voltage and a brief initialisation phase, the BUS module switches to
"Pre-Operational" mode. Via the bus module, up to 4 frequency inverters can be accessed, each with one
control word and up to 3 setpoints (in exchange with the status word and up to 3 actual values).
The allocation of the functions for the setpoints and actual values is carried out on the relevant frequency
inverter (e.g. SK 200E series). Here, the settings are made via parameter (P546) or (P543) (see
frequency inverter manual BU0200).
The following optimisations are recommended
Disabling of the transmission and reception channels for PDOs which are not required (reduces bus load)
((P160) or objects 0x1400 ... 0x1414 or 0x1800 ... 0x1804)
36 Subject to technical amendments BU 0260 GB
Page 37

4 Commissioning
The following mapping (or re-parameterisation) is possible
Enabling of PDO 5, in order to ensure access to the digital I/Os of the bus module.
((P160) or objects 0x1404 or 0x1804)
Switching on the "Velocity Mode" to DS402 if control is to be carried out in Profile Mode.
((P168) or objects 0x6048, 0x6049)
Adaptation of the inhibit and event time to optimise transmission by the PDOs
((P163) and (P164) or objects 0x1800 ... 0x1804)
Setup of monitoring functions (Node monitoring - Guarding and Heartbeat)
((P166) and (P167) or objects 0x100C, 0x100D, 0x1017)
The following mapping (or re-parameterisation) is possible, but should only be carried out in
exceptional cases
Change of the COB-ID of individual SDO and PDO objects
((P161) or objects 0x1005, 0x1200 … 0x1203, 0x1400 … 0x1404, 1800 … 1804)
NOTE
As there is a deviation from the CiA standard on changing the default settings,
special care is required in order to prevent conflicts in the operation of the bus.
Access to the objects can be obtained by two methods.
On the field bus level: Dynamic mapping (PDO mapping via SDOs)
On the parameter level of the BUS module: ((P160)…(P168)) via NORDAC control elements
(NORDCON software, ParameterBox SK PAR-3H)
NOTE
Changes are only permissible in "Pre-Operational" mode.
BU 0260 GB Subject to technical amendments 37
Page 38

Supplementary Manual CANopen for NORDAC SK 20E
The following check list provides and overview for the commissioning of a relevant network.
Description Designation Relevant parameter Comments
Necessary / required settings
Hardware address
Bus node
Frequency inverter
Baud rate
Bus node
Frequency inverter
PDO pause time Inhibit time (P163)
PDO transmission interval Event time (P164)
Definition of process data (PZD) STW / ZSW / SW / IW
Additional settings
PDO transmission type PDO transmission type (P162)
CAN node monitoring Guard-time and Heartbeat (P166) and (P167)
Validity of PDO/SDO COB-ID On/Off (P160)
Setting only in special cases (if possible leave at factory setting)
Definition of COB-ID COB-ID (P161)
Definition of PZD mapping PDO mapping (P165)
CANopen identifier DIP switch
System bus address (CAN) DIP switch (SK 200E) alternative (P515)
CANopen baud rate DIP switch
System bus baud rate
Fixed at 250kBaud
(SK 200E)
(P502), (P503), (P509),
(P510), (P546)
(… or (P548))
Different for each
subscriber (node)
Same for each
subscriber (node)
Alternative (P514)
(leave at 250kBaud!)
alternative (P168)
(profile DSP 402)
For a description of the individual objects please refer to Section 4.9 "Object dictionary".
4.2 EDS file
For CANopen masters which can be configured with a PC, Getriebebau Nord GmbH provides the necessary
EDS file (Electronic Data Sheet) with the relevant CANopen objects for all relevant Nord products. These files
are contained on the documentation CD, which is provided with the hardware. Updates on a daily basis are
available on www.nord.com
.
4.3 Hardware configuration of the CANopen bus modules
Configuration of the bus module is carried out exclusively via a DIP switch element attached to the module
(see Section 2.2.3 "Configuration"). In addition to the baud rate and the node addresses (node identifiers) the
termination resistors for the bus system and the CANopen bus must be set.
Software configuration if these items is not provided.
NOTE
The coding of the DIP switches (Identifier, address and baud rate) are only read out during
the initialisation phase, i.e. after switching on the 24V power supply to the bus module.
Changes to the DIP switches are therefore only recognised if the module has been
switched off for a sufficient period (all LEDs out) after a change of addressing.
38 Subject to technical amendments BU 0260 GB
Page 39

4 Commissioning
4.4 Gateway function
Up to four frequency inverters can be controlled via the bus module (see also Section 8.4 "System bus"). Each
FI is allocated its own PDO channel for the process data. For parameterisation, each FI in the bus module has
a separate allocated SDO channel. The allocation of the individual channels can be seen in the table in
Section 4.9.1 "Predefined Connection Set".
4.5 Communication
After conclusion of the individual initialisation phase, all participants in a CANopen network can be set to one
of three operational states.
According to the operational state:
Subscribers can be configured via SDO messages
Can exchange process data via PDO messages
Are disconnected from communication (Stopped), to the extent that only NMT messages
communicated.
The coordination of the operating states is carried out on the basis of a very simple network management by
an NMT master.
(Pre-Operational),
(Operational) or
can be
4.5.1 Network Management (NMT)
The individual states can be activated with the following commands:
Set network to Operational (Start Remote Node):
Identifier = 0x00 // data byte 0 = 0x01 // data byte 1 = 0x** (relevant node address)
Set network to Stopped (Stop Remote Node):
Identifier = 0x00 // data byte 0 = 0x02 // data byte 1 = 0x** (relevant node address)
Set network to Pre- Operational (Enter Pre - Operational):
Identifier = 0x00 // data byte 0 = 0x80 // data byte 1 = 0x** (relevant node address)
Reset Node :
Identifier = 0x00 // data byte 0 = 0x81 // data byte 1 = 0x** (relevant node address)
Reset Communication:
Identifier = 0x00 // data byte 0 = 0x82 // data byte 1 = 0x** (relevant node address)
4.5.2 PDO communication
If a subscriber is in an "Operational" state, it is able to exchange process data via PDO messages.
A differentiation is made between Transmit PDOs (Tx), in which the bus module transmits the status data of up
to 4 connected frequency inverters, and Receive PDOs (Rx) in which it receives the relevant control data. The
4 Transmit and Receive PDOs are identified by different identifiers.
Transfer of PDOs is made without confirmation. The significance of the data transferred is determined by the
CAN identifiers being used and the PDO mapping. A maximum of 8 bytes of data are transferred.
NOTE
In principle, no settings are required to ensure the correct functioning of communication,
however various adaptations are possible if these are necessary for the communication
sequence required by the customer.
All PDO settings can be made via the relevant parameter. However, parameterisation via
the SDO parameter channel of the CANopen bus is also possible.
The settings which are made are permanently stored in the device.
BU 0260 GB Subject to technical amendments 39
Page 40

Supplementary Manual CANopen for NORDAC SK 20E
4.5.2.1 Changing the COB-ID (address) of a PDO
Changes to the identifier of a PDO can only be made when the NMT status machine of the inverter is in the
"Pre-Operational" state.
Setting of the COB-ID of a PDO is made via the parameters (P160) and (P161) (and therefore in the objects
0x1400-0x1404 Sub. 1 or 0x1800-0x1804 Sub. 1). If possible, the default settings of these parameters should
be retained.
Alternatively, the settings can also be realised via the SDO parameter channel. Each Transmit and Receive
PDO has its own parameter for this setting (see the following table).
PDO Receive PDO Transmit PDO
PDO for FI 1 0x1400 Sub 1 0x1800 Sub 1
PDO for FI 2 0x1401 Sub 1 0x1801 Sub 1
PDO for FI 3 0x1402 Sub 1 0x1802 Sub 1
PDO for FI 4 0x1403 Sub 1 0x1803 Sub 1
PDO for bus module 0x1404 Sub 1 0x1804 Sub 1
Index table for inverter Transmit and Receive PDOs
This parameter is a 32 bit value, which includes other information in addition to the identifier.
Bit number Value Significance
31
30 1
29 to 11 0
10 to 0 X PDO identifier ( COB-ID )
0 PDO is active
1 PDO is switched off
Values cannot be changed
Description of PDO COB-ID entry
The PDO identifier is stored in bits 0 to 10. Bit 31 must be set to null, otherwise the PDO will be deactivated. If,
e.g. the identifier for a Transmit PDO is changed to 0x201, the value 0x40000201 must be entered in the
appropriate parameter.
The new identifier becomes valid by setting the NMT status machine to the "Operational" state.
40 Subject to technical amendments BU 0260 GB
Page 41

4 Commissioning
4.5.2.2 PDO operating modes (transmission type)
The "transmission type" determines when a transmit PDO is transmitted and when the data from a receive
PDO is processed (see also Section 8.3.2.1 "PDO (Process Data Object)"). These settings are made in
parameter (P162) (and therefore in objects 0x1400-0x1404 Sub. 2 for Rx -PDOs or 0x1800-0x1804 Sub. 2 for
Tx -PDOs). The following settings can be made with NORDAC frequency inverters:
Transmission type Value
Transmit PDO (Tx)
0 PDO is transmitted if a SYNC command has been received and the data (status) has changed
since the last SYNC command.
1-240 PDO is transmitted if 1..240 SYNC commands have been received, whether the data (status)
has changed or not.
252-253 Reserved
254, 255 PDO is transmitted immediately if the data (status) has changed (standard setting).
Receive PDO (Rx)
0-240 Data from the Receive PDO is only processed after the next SYNC command has been
received.
252-253 Reserved
254, 255 Data from Receive PDO is processed immediately (standard setting)
4.5.2.3 Inhibit time
For each Transmit PDO an individual "Inhibit time" can be defined in (P163) (and therefore in objects 0x18000x1804 Sub. 3). This can be used to set a minimum transmission interval between two PDO messages. In
networks with a large number of participants, the bus load can be influenced with this value. The standard
setting is 10ms.
4.5.2.4 Event time
The Parameter "Event time" (P164) (and therefore objects 0x1800 – 0x1803 Subindex 5) can be used for all
Transmit PDOs. Cyclical transmission of the PDOs is achieved via this value. The standard setting is 250ms.
4.5.2.5 PDO mapping
The sequence of the process data (PZD) in the PDOs is defined by the PDO mapping in parameter (P165)
(and therefore in the objects 0x1600 - 0x1604 or 0x1A00 - 0x1A04). Changes to the PDO mapping are only
permissible in the "Pre-Operational" state. The PDOs shown here correspond to the default setting.
Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
Control word Setpoint 1 Setpoint 2 Setpoint 3
16 bit 32 bit (e.g. position setpoint) 16 bit
Low byte High byte Low Low byte Low High byte High Low byte High High byte Low byte High byte
The 16 and 32 bit process data must be transmitted in "Little Endian" format (Low byte - High byte).
NOTE
The PDO structure for a frequency inverter is pre-defined. With the use of the associated
EDS file, no adaptation for the exchange of data is necessary.
Due to mapping of the PDO with 16 bit width, so-called dummy mapping is not necessary.
BU 0260 GB Subject to technical amendments 41
Page 42

Supplementary Manual CANopen for NORDAC SK 20E
4.5.2.6 PDO transmission / access in USS Protocol Mode
The internal status machine of the frequency inverter (USS) applies for the transfer of process data. Access to
the individual frequency inverters is according to the following pattern (see Section 4.9.4 "Frequency inverter
objects (2000hex - 3005hex )").
PDO setpoint
Gateway
mode
2nd frequency inverter
Sequence in CAN telegram
Indication in word
0 0x3000 2 Control word (STW)
3rd frequency inverter
Sequence in CAN telegram
Indication in word
0 0x3000 3 Control word (STW)
4th frequency inverter
Sequence in CAN telegram
Indication in word
0 0x3000 4 Control word (STW)
1 0x3002 10 Setpoint 1 (SW1)
2 0x3002 11 Setpoint 2 (SW2)
3 0x3002 12 Setpoint 3 (SW3)
1 0x3002 7 Setpoint 1 (SW1)
2 0x3002 8 Setpoint 2 (SW2)
3 0x3002 9 Setpoint 3 (SW3)
1 0x3002 4 Setpoint 1 (SW1)
2 0x3002 5 Setpoint 2 (SW2)
3 0x3002 6 Setpoint 3 (SW3)
1st frequency inverter
Sequence in CAN telegram
Indication in word
0 0x3000 1 Control word (STW)
1 0x3002 1 Setpoint 1 (SW1)
2 0x3002 2 Setpoint 2 (SW2)
3 0x3002 3 Setpoint 3 (SW3)
Setpoint - PDO in USS Protocol Mode
Index Sub-index Description
Setpoint - PDO in USS Protocol Mode
Index Sub-index Description
Setpoint - PDO in USS Protocol Mode
Index Sub-index Description
Setpoint - PDO in USS Protocol Mode
Index Sub-index Description
In the following example of a VIPA control, the linking of the objects (control word and setpoint) of FI 1 to those
of the CANopen master is illustrated.
STW SW1 SW2 SW3
42 Subject to technical amendments BU 0260 GB
DOs
Page 43

4 Commissioning
Actual PDO value
Gateway
mode
2nd frequency inverter
Sequence in CAN telegram
Indication in word
0 0x3001 2 Status word (ZSW)
3rd frequency inverter
Sequence in CAN telegram
Indication in word
0 0x3001 3 Status word (ZSW)
4th frequency inverter
Sequence in CAN telegram
Indication in word
0 0x3001 4 Status word (ZSW)
1 0x3003 10 Actual value 1 (IW1)
2 0x3003 11 Actual value 2 (IW2)
3 0x3003 12 Actual value 3 (IW3)
1 0x3003 7 Actual value 1 (IW1)
2 0x3003 8 Actual value 2 (IW2)
3 0x3003 9 Actual value 3 (IW3)
1 0x3003 4 Actual value 1 (IW1)
2 0x3003 5 Actual value 2 (IW2)
3 0x3003 6 Actual value 3 (IW3)
1st frequency inverter
Sequence in CAN telegram
Indication in word
0 0x3001 1 Status word (ZSW)
1 0x3003 1 Actual value 1 (IW1)
2 0x3003 2 Actual value 2 (IW2)
3 0x3003 3 Actual value 3 (IW3)
Actual value - PDO in USS Protocol Mode
Index Sub-index Description
Actual value - PDO in USS Protocol Mode
Index Sub-index Description
Actual value - PDO in USS Protocol Mode
Index Sub-index Description
Actual value - PDO in USS Protocol Mode
Index Sub-index Description
In the following example of a VIPA control, the linking of the objects (status word and actual value) of FI 1 to
those of the CANopen master is illustrated.
STW
SW1
SW2
SW3
DIs
BU 0260 GB Subject to technical amendments 43
Page 44

Supplementary Manual CANopen for NORDAC SK 20E
CANopen also enables direct access to the inputs and outputs of the BUS module. An example of the linking
of the relevant objects in the control unit is shown in the illustrations above.
PDO setpoint
Actual PDO
value
BUS module
Sequence in CAN telegram
Indication in word
1 0x3004 0 0 Output 1
BUS module
Sequence in CAN telegram
Indication in word
1 0x3005 0 0 Input 1
Setpoint - PDO in USS Protocol Mode
Index
Actual value- PDO in USS Protocol Mode
Index
Subindex
Subindex
Bit Description
1 Output 2
Bit Description
1 Input 2
2 Input 3
3 Input 4
4.5.3 PDO communication in drive profile DS 402 ("Velocity Mode")
For more simple applications (only speed setpoints) the Velocity Mode in device profile DS 402 is available.
For this, the profile must be activated in parameter (P168 [-01]) of the CANopen bus module SK xU4-CAO-…
(corresponds to the default setting).
Activation of the profile affects all the frequency inverters on the system bus in the same way. The profile is
only valid in parameter set 1.
The association of the objects in the drive profile Velocity Mode (Speed) can be seen from the following
illustration.
Source: Velocity Mode CiA DSP 402 V1.1 page 178
For the transfer of process data in profile mode, the status engine is implemented according to the CANopen
drive profile CiA DSP 402. In association with the drive profile, objects 0x6040 - 0x6044 are relevant instead of
objects 0x3000 - 0x3004.
44 Subject to technical amendments BU 0260 GB
Page 45

DS 402
4 Commissioning
PDO setpoint
Actual PDO
value
Frequency inverter
Sequence in CAN telegram
Indication in word
0 0x6040 0 Status word
1 0x6042 0 Setpoint speed value
Frequency inverter
Sequence in CAN telegram
Indication in word
0 0x6041 0 Status word
1 0x6044 1 Actual speed value
Setpoint - PDO in „Drive and Motion Control“
Index
Actual value - PDO in "Drive and Motion Control"
Index
Subindex
Subindex
Description
Description
Illustration in the tables: Association with FI 1 – 4, bus modules DI/Os 0x60... parameter P168, P165, dynamic
mapping.
In this mode the digital inputs and outputs can only be mapped into the PDO via the objects 0x60FD and
0x60FE (see Section 4.9.3 "CANopen objects DSP402 – drive profile").
4.5.4 SDO communication
In order to exchange parameter data, the participants can communicate via SDOs.
In order to access the various frequency inverters in Gateway mode (see Section 4.9.1 "Predefined
Connection Set") the SDOs must be enabled. Enabling of the relevant SDO channels is made via parameter
(P160) of the CANopen technology unit.
4.5.4.1 Dynamic PDO mapping
The technology units SK xU4-CAO-... support so-called "Dynamic PDO mapping". This means that the
information content of the PDOs can be changed. Mapping of the PDOs is not necessarily carried out by
means or NORD parameterisation tools (NORDCON software or ParameterBox SK PAR-3H), but can also be
performed directly via the CANopen protocol with the aid of SDOs. A detailed example of this is described in
Section 7.4.2.3 "Application-specific mapping".
4.5.4.2 Structure of SDO telegrams
Access to all parameters of the frequency inverters connected to a common system bus is carried out via socalled service data objects (SDO). Access is via handshake between client and server, i.e. after a message is
transmitted, the response must be waited for before a new message can be sent.
Only one TxSDO and one RxSDO are assigned to each frequency inverter in the object data set of the
associated field bus module SK xU4-CAO-... As delivered, only the SDO for the frequency inverter FI 1 is
enabled in the bus module. All further frequency inverters (FI 2 ... FI 4) these must be enabled as required via
parameter (P160 [-03] ... [-05].
The node ID of the CANopen BUS Module is set via its DIP switch (see Section 2.2.3 "Configuration"). The
Transmit and Receive IDs of the frequency inverters connected to this system bus result from the node ID and
the system bus address of the frequency inverter.
Transmit and receive addresses for SDO access as seen from the PLC
:
6000
5800
Node IDxDTransmit I
Node IDxReceive ID
BU 0260 GB Subject to technical amendments 45
Page 46

Supplementary Manual CANopen for NORDAC SK 20E
The definition of addresses is summarised in Section 4.9.1 "Predefined Connection Set".
An SDO telegram is divided into a configuration area and a data area. "Little Endian" format is also used for
SDOs.
Configuration area Data area
Control byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
E.g.:
"Download"
Byte Low byte High byte Byte Low Low byte Low High byte High Low byte High High byte
"Parameter number"
E.g.:
E.g.:
"Array"
"Parameter values"
E.g.:
4.5.4.3 Transmitting parameter data via SDO
Transmission of an SDO on the bus is as follows:
Transmit an 8 bit value (0x100d Sub 00 / Data = 10)
Control byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
0x2f 0x0d 0x10 0x00 0x0a 0x00 0x00 0x00
Transmitting a 16 bit value (0x1800 Sub 03 / Data = 100)
Control byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
0x2b 0x00 0x18 0x03 0x64 0x00 0x00 0x00
Transmitting a 32 bit value (0x1801 Sub 01 / Data = 0x40000282)
Control byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
0x23 0x01 0x18 0x01 0x82 0x02 0x00 0x40
The response for an error-free telegram is =x60 in Byte 0. Other responses indicate an error (see Section
4.5.4.5 "Cancelling of parameter communication").
4.5.4.4 Loading parameter data via SDO
The request of an SDO via the bus is as follows.
Load a 16 bit value (0x1800 Sub 03)
Control byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
0x40 0x00 0x18 0x03 0x00 0x00 0x00 0x00
Response (0x1800 Sub 3 = 1000)
Status byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
0x4b 0x00 0x18 0x03 0xe8 0x03 0x00 0x00
46 Subject to technical amendments BU 0260 GB
Page 47

4 Commissioning
Load a 32 bit value (0x1800 Sub 01)
Control byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
0x40 0x00 0x18 0x01 0x00 0x00 0x00 0x00
Response (0x1800 Sub 1 = 0x40000182)
Status byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
0x43 0x00 0x18 0x01 0x82 0x01 0x00 0x40
If the query is faulty, the response in byte 0 = 0x80.
4.5.4.5 Cancelling of parameter communication
If problems occur during parameter communication (e.g. value range overflow), a cancel telegram is sent. This
can be recognised by the number 0x80 in byte 0. The cause of the cancellation is indicated in bytes 4 to 7.
Status byte Last index used Error code
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
0x80 0x00 0x18 0x01 0x02 0x00 0x01 0x06
Example of error message ( 0x06010002 = Access to read-only object)
A list of all possible error codes is contained in Section 4.9.5 "Error codes – cancellation of parameter
communication"
4.6 Timeout monitoring
Various timeout monitoring modules can be defined. Details of these are described in Section 6.1.1 "Error
monitoring details".
4.7 Saving the parameters
If the CANopen bus module is accessed via RS232 (e.g. via NORDCON software or the ParameterBox), the
parameter changes are saved in the EEPROM immediately. Loading of the factory settings can be carried out
via parameter (P152).
For changes to module parameters via the CANopen bus, 0x1010 Subindex 1 is used to save the parameter.
Restoration of default values is possible via 0x1011 Subindex 1.
4.8 Special features of CANopen communication
The DSP402 drive profile is only implemented in the field bus modules (SK xU4-CAO).
Broadcast operation is not possible via the CANopen field bus modules (SK xU4-CAO). This can only take
place directly between the frequency inverters at system bus level or with direct connection of the frequency
inverter to the CANopen field bus.
BU 0260 GB Subject to technical amendments 47
Page 48

Supplementary Manual CANopen for NORDAC SK 20E
4.9 Object dictionary
The object dictionary describes the complete functionality of the CANopen devices and is organised in the form
of a table (see also the table in Section 7.2 "Structure of reference data"). In addition to standardised data
types and objects of the CANopen communication profile, this dictionary also contains the device profiles of
Nord product-specific objects (inverter and module parameters). Addressing is performed via a 16 bit index
(row address of the table) and an 8 bit subindex (column address of the table).
Index (hex) Object
0000 Not used
0001 - 001F Statistical data types
0020 - 003F Complex data types
0040 - 005F Data types specific to manufacturer
0060 - 007F Statistical data types specific to profile
0080 - 009F Statistical data types specific to profile
00A0 - 0FFF Reserved
1000 - 1FFF Communication profile (DS-301)
2000 - 5FFF Parameters specific to manufacturer (Nord product-specific parameters)
6000 - 9FFF Parameters from standardised device profiles (DSP-402)
A000 - FFFF Reserved
All available objects are contained in the “Electronic data sheet” (eds file) of the NORDAC frequency inverter
or the SK xU4-CAO-...-BUS module.
48 Subject to technical amendments BU 0260 GB
Page 49

4 Commissioning
4.9.1 Predefined Connection Set
The bus module is equipped with 5 Transmit and Receive PDOs and 4 SDO channels.
The Predefined Connection Set of the CANopen standard DS301 does not provide so many PDO and SDO
channels. Therefore there is a danger of address conflicts with devices which use the Predefined Connection
set defined in DS301. In order to keep this danger as small as possible, the additional channels are divided
into the address space (Node-ID) 64 to 127.
The following table contains the Predefined Connection Set for the bus modules SK xU4-CAO-... . With these
default settings (see also parameter (P161) “COB-ID” and (P160) for the validity of the COB-ID) an exchange
of process data to all 4 frequency inverters connected to the system bus (Gateway Mode) is possible.
In order to implement communication via SDOs, the relevant arrays must be enabled in parameter (P160).
Object Availability COB-ID Accessed FI
NMT Enabled 0 FI 1, FI 2, FI 3, FI 4 and bus module
SYNC Enabled 0x80 FI 1, FI 2, FI 3, FI 4 and bus module
EMERGENCY Enabled 0x80 + Address FI 1, FI 2, FI 3, FI 4 and bus module
PDO1 (Tx) Enabled 0x180 + Address FI 1
PDO1 (Rx) Enabled 0x200 + Address FI 1
PDO2 (Tx) Enabled 0x280 + Address FI 2
PDO1 (Rx) Enabled 0x300 + Address FI 2
PDO3 (Tx) Enabled 0x380 + Address FI 3
PDO3 (Rx) Enabled 0x400 + Address FI 3
PDO4 (Tx) Enabled 0x480 + Address FI 4
PDO4 (Rx) Enabled 0x500 + Address FI 4
PDO5 (Tx) Disabled 0x1C0 + Address Bus module
PDO5 (Rx) Disabled 0x240 + Address Bus module
SDO1 (Tx) Enabled 0x580 + Address FI 1, bus module
SDO1 (Rx) Enabled 0x600 + Address FI 1, bus module
SDO2 (Tx) Disabled 0x2C0 + Address FI 2
SDO2 (Rx) Disabled 0x340 + Address FI 2
SDO3 (Tx) Disabled 0x3C0 + Address FI 3
SDO3 (Rx) Disabled 0x440 + Address FI 3
SDO4 (Tx) Disabled 0x4C0 + Address FI 4
SDO4 (Rx) Disabled 0x540 + Address FI 4
NMT Error Control Enabled FI 1, FI 2, FI 3, FI 4 and bus module
ATTENTION
For devices from other manufacturers, CAN addresses (Node-ID) higher than 64 should be
used with caution, as they could be occupied by CANopen bus modules:
Additionally occupied Node-ID = Node-ID (bus module) + 64.
BU 0260 GB Subject to technical amendments 49
Page 50

Supplementary Manual CANopen for NORDAC SK 20E
4.9.2 CANopen profile DS301
The available objects are defined according to communication profile DS301.
4.9.2.1 Communication objects (1000
Index Sub Object Description Unit Access Type
0x1000 0 Device type Device type and functionality RO U32
0x1001 0 Error register
0x1002 0 Status register Status of the module RO U32
0x1003 ARR Pre-defined error Error signaled by an emergency object U8
- 1200
hex
The Error Register is set to 1 (=generic error) if one of
the connected frequency inverters is in an error state.
In addition, it is monitored whether a registered
inverter goes missing. In this case, this register will
also be set.
hex
)
RO U8
0 Number of errors
1 Error code Error number RO U32
0x1005 0 COB-ID SYNC
0x1008 0 Device name Device name RO STR
0x1009 0 Hardware version Hardware version RO STR
0x100A 0 Software version Software version FI+CO RO STR
0x100C 0 Guard time
0x100D 0 Life time factor
0x1010 0 Store parameters
0x1011 0
Restore default
parameters
Number of errors;
0 deletes the error list
Identifier for SYNC messages (default 80h)
(see parameter (P161 [-01]))
Guard time (0=off)
(see parameter (P166 [-01]))
Life time = Life time factor * Guard time
(see parameter (P167))
With this object it is possible to permanently save
settings made by the user. To do this, the signature
“Save“ (lower case letters ASCII – MSB - 0x65 76 61
73 - LSB) must be written in Index 0x1010 Sub-index
1. The saving process runs in the background and is
confirmed with an SDO response telegram.
Caution
switches after saving a configuration, the saved
configuration will still be used. The default mapping
is restored with the object 0x1011.
With this object it is possible to restore parameters
saved by the user to the default settings. By writing
the signature "load" (lower case letters ASCII - MSB
0x64 0x61 0x6F 0x6C LSB) in Index 0x1011 Subindex 1, the standard factory settings will be loaded
after the following Power ON and every other Power
ON (until the next SAVE command).
(see parameter (P152))
: If the module ID is changed with the DIP
RW U8
RW U32
ms RW U16
RW U8
RW U32
RW U32
0x1014 0
0x1015 0 Inhibit time EMCY Minimum repeat time ms RW U16
0x1017 0
0x1018 REC Identity object General device information U32
0 Largest sub-index Number of elements RO U8
1 Vendor ID CiA-listed manufacturer code RO U32
2 Product code Device version (product number) RO U32
3 Revision number Software version and revision number (2x16 bit) RO U32
50 Subject to technical amendments BU 0260 GB
COB-ID
Emergency Object
Producer Heartbeat
time
Identifier Emergency Object
(80h+Node-ID)
Cycle time of the heartbeat function
(see Parameter (P166 [-02]))
RO U32
ms RW U16
Page 51

4 Commissioning
Index Sub Object Description Unit Access Type
4 Serial number Serial number RO U32
0x1200 REC Default server SDO Server SDO
0 Largest sub-index Number of elements RO U8
1
0x1200 2
0x1201-
Rec, 0 See above (0x1200)
0x1203
0x1201 1
2
0x1202 1
2
0x1203 1
COB-ID Server>Client
(rx)
COB-ID Server>Client
(tx)
COB-ID Server>Client
(rx)
COB-ID Server>Client
(tx)
COB-ID Server>Client
(rx)
COB-ID Server>Client
(tx)
COB-ID Server>Client
(rx)
Identifier of Receive SDO (600h+ID)
SDO for FI 1 and the bus module
(see parameter (P161 [-03]))
Identifier of Receive SDO (580+ID)
SDO for FI 1 and the bus module
(see parameter (P161 [-03]))
Identifier of Receive SDO (340h+ID)
SDO for FI 2
(see parameter (P161 [-05]))
Identifier of Transmit SDO (2C0h+ID)
SDO for FI 2
(see parameter (P161 [-04]))
Identifier of Receive SDO (440h+ID)
SDO for FI 3
(see parameter (P161 [-07]))
Identifier of Transmit SDO (3C0h+ID)
SDO for FI 3
(see parameter (P161 [-06]))
Identifier of Receive SDO (540h+ID)
SDO for FI 4
(see parameter (P161 [-09]))
RO U32
RO U32
RW U32
RW U32
RW U32
RW U32
RW U32
2
COB-ID Server>Client
(tx)
Identifier of Transmit SDO (4C0h+ID)
SDO for FI 4
(see parameter (P161 [-08]))
RW U32
BU 0260 GB Subject to technical amendments 51
Page 52

Supplementary Manual CANopen for NORDAC SK 20E
4.9.2.2 PDO objects (1400
Index* Sub Object Description Unit Access Type
- 1A04
hex
hex
)
0x1400-
0x1404
0 Largest sub-index Number of elements RO U8
1 COB-ID used by PDO
2 Transmission type
3 Not used Not used - -
4 Reserved Reserved - -
5 Not used Not used - -
0x1600-
0x1604
0 Largest sub-index Number of elements RO U8
0x1600-
0x1603
0x1604 1 PDO mapping
Receive PDO communication
REC
REC
1-4 PDO mapping
parameter
Receive PDO mapping
parameter
Receive PDO characteristics RW
Receive PDO identifier
(see parameter (P161 [-11,-13,-15,-17,-19]))
Receive PDO type (see Section 4.5.2.2 "PDO
operating modes (transmission type)")
(see parameter (P162 [-02,-04,-06,-08,-10]))
Receive PDO mapping (see Section 4.5.2.5
PDO mapping")
"
Mapped objects (FI 1 … FI 4)
(see parameter (P165 [-05 … -08],
(P165 [-13 … -16],
(P165 [-21 … -24],
(P165 [-29 … -32])
Bus module
(see parameter (P165 [-34])
RW U32
RW U8
RW
RW U32
RW U32
0x1800-
0x1804
0 Largest sub-index Number of elements RO U8
1 COB-ID used by PDO
2 Transmission type
3 Inhibit time
4 Reserved Reserved - -
5 Event timer
0x1A00-
0x1A04
0 Largest sub-index Number of elements RW U8
0x1A00-
0x1A03
Transmit PDO communication
REC
REC
1-4 PDO mapping
parameter
Transmit PDO mapping
parameter
Transmit PDO characteristics RW
Receive PDO identifier
(see parameter (P161 [-10,-12,-14,-16,-18]))
Transmit PDO type (see Section 4.5.2.2
"PDO operating modes (transmission
type)")
(see parameter (P162 [-01,-03,-05,-07,-09]))
Minimum transmission time
(see parameter (P163 [-01 … -05]))
Cyclical transmission timer
(see parameter (P163 [-01 … -05]))
Receive PDO mapping (see Section 4.5.2.5
PDO mapping")
"
Mapped objects (FI 1 ... FI 4)
(see parameter (P165 [-01 … -04],
(P165 [-12 … -15],
(P165 [-20 … -23],
(P165 [-28 … -31])
RW U32
RW U8
100µs RW U16
ms RW U16
RO
RW U32
Bus module
0x1A04 1 PDO mapping
* xx00 hex = FI1, xx01 hex = FI2, xx02 hex = FI3, xx03 hex = FI4, xx04 hex = Bus module
(see parameter (P165 [-33])
RW U32
52 Subject to technical amendments BU 0260 GB
Page 53

4 Commissioning
4.9.3 CANopen objects DSP402 – drive profile
From the device profile DS402, the operating mode "Velocity Mode" is supported by the CANopen modules SK
xU4-CAO(-...). In order to use this drive profile, the operating mode "Profile" must be switched on in parameter
(P168 [-01]) and the PDOs mapped to the objects used (e.g. 0x6040 + 0x6042 RxPDO and 0x6041 + 0x6044
TxPDO) In this operating mode the digital inputs and outputs of the bus module can only be mapped in the
PDO via the objects 0x60FD and 0x60FE. Direct processing of these I/Os via the connected frequency
inverter(s) is not possible.
Index Sub Object Description Unit Access Type
0x603F 0 Error code Last error RO U16
0x6040 0 Control word
0x6041 0 Status word
0x6042 0 Vl_target_velocity Speed setpoint rpm RW I16
0x6043 0 Vl_velocity_demand Speed setpoint after ramp rpm RO I16
0x6044 0 Vl_control_effort Actual speed value rpm RO I16
0x6046 Vl_velocity_min_max_amount
0 Largest sub-index Number of elements RO U8
1 Vl_velocity_min_amount Min. speed rpm RW U32
2 Vl_velocity_max_amount Max. speed rpm RW U32
0x6048 Vl_velocity_acceleration Speed acceleration
0 Largest sub-index Number of elements RO U8
1 Delta_speed
2 Delta_time
Control word
0 = Standby / Shut down
1 = Disable voltage / Enable voltage
2 = Rapid stop / Enable operation
3 = Enable / Disable operation
4 = Rapid stop / No rapid stop
5 = Stop run-up encoder / Enable run-up
encoder
6 = Disable / Enable setpoint
7 = 0 / Acknowledge fault
8 = Reserved
9 = Reserved
10 = Reserved
11 = Rotation right / Rotation left
12 = Reserved
13 = Reserved
14 = Reserved
15 = Reserved
Status word
0 = Not on standby /Standby
1 = Not ready / Ready
2 = Operation disabled / Enabled
3 = No fault / Fault
4 = Voltage enabled / Voltage disabled
5 = Rapid stop active / No rapid stop
6 = No switch-on lock / Switch-on lock
7 = No warning / Warning
8 = Reserved
9 = Local control / Bus control
10 = Setpoint not reached / Setpoint reached
11 = Setpoint not limited / Setpoint limited
12 = Reserved
13 = Reserved
14 = Reserved
15 = Reserved
Delta speed
(see Parameter
(P168 [-02, -06, -10, -14]))
Delta time
(see Parameter
(P168 [-03, -07, -11, -15]))
RW U16
RO U16
rpm RW U32
S RW U16
BU 0260 GB Subject to technical amendments 53
Page 54

Supplementary Manual CANopen for NORDAC SK 20E
Index Sub Object Description Unit Access Type
0x6049 Vl_velocity_deceleration Speed deceleration
0 Largest sub-index Number of elements RO U8
1 Delta_speed
Delta speed
rpm RW U32
(see parameter
(P168 [-04, -08, -12, -16]))
2 Delta_time Delta time
(see parameter
S RW U16
(P168 [-05, -09, -13, -17]))
0x60FD Digital inputs profile
PDO data (00 0X 00 00)
0x60FE Digital outputs profile
0…15 = Reserved
16 = Digital input 1 (ext. + int. modules)
17 = Digital input 2 (ext. + int. modules)
18 = Digital input 3 (ext. modules)
19 = Digital input 4 (ext. modules)
20…31 = Reserved
0…15 = Reserved
16 = Digital output 1 (ext. modules)
17 = Digital output 2 (ext. modules)
18…31 = Reserved
RO U32
RW U32
54 Subject to technical amendments BU 0260 GB
Page 55

4 Commissioning
4.9.4 Frequency inverter objects (2000
Index Sub Object Description Unit Acc Type
0x20000x23E7
0x3000 0
0x3000 1 Control word Control word (STW) FI 1 RW U16
0x3000 2 Control word Control word (STW) FI 2 RW U16
0x3000 3 Control word Control word (STW) FI 3 RW U16
0x3000 4 Control word Control word (STW) FI 4 RW U16
0x3001 0
0x3001 1 Status word Status word (ZSW) FI 1 RO U16
0x3001 2 Status word Status word (ZSW) FI 2 RO U16
0x3001 3 Status word Status word (ZSW) FI 3 RO U16
0x3001 4 Status word Status word (ZSW) FI 4 RO U16
0x3002 0
0x3002 1 Setpoint 1 Setpoint 1 (SW1) FI 1 RW U16
0x3002 2 Setpoint 2 Setpoint 2 (SW2) FI 1 RW U16
0x3002 3 Setpoint 3 Setpoint 3 (SW3) FI 1 RW U16
0x3002 4 Setpoint 1 Setpoint 1 (SW1) FI 2 RW U16
0x3002 5 Setpoint 2 Setpoint 2 (SW2) FI 2 RW U16
0x3002 6 Setpoint 3 Setpoint 3 (SW3) FI 2 RW U16
0x3002 7 Setpoint 1 Setpoint 1 (SW1) FI 3 RW U16
0x3002 8 Setpoint 2 Setpoint 2 (SW2) FI 3 RW U16
0x3002 9 Setpoint 3 Setpoint 3 (SW3) FI 3 RW U16
0x3002 10 Setpoint 1 Setpoint 1 (SW1) FI 4 RW U16
0x3002 11 Setpoint 2 Setpoint 2 (SW2) FI 4 RW U16
0x3002 12 Setpoint 3 Setpoint 3 (SW3) FI 4 RW U16
0x3003 0
0x3003 1 Actual Value 1 Actual value 1 (IW1) FI 1 RO U16
0x3003 2 Actual Value 2 Actual value 2 (IW2) FI 1 RO U16
0x3003 3 Actual Value 3 Actual value 3 (IW3) FI 1 RO U16
0x3003 4 Actual Value 1 Actual value 1 (IW1) FI 2 RO U16
0x3003 5 Actual Value 2 Actual value 2 (IW2) FI 2 RO U16
0x3003 6 Actual Value 3 Actual value 3 (IW3) FI 2 RO U16
0x3003 7 Actual Value 1 Actual value 1 (IW1) FI 3 RO U16
0x3003 8 Actual Value 2 Actual value 2 (IW2) FI 3 RO U16
0x3003 9 Actual Value 3 Actual value 3 (IW3) FI 3 RO U16
0x3003 10 Actual Value 1 Actual value 1 (IW1) FI 4 RO U16
0x3003 11 Actual Value 2 Actual value 2 (IW2) FI 4 RO U16
0x3003 12 Actual Value 3 Actual value 3 (IW3) FI 4 RO U16
0x3004 0 Digital outputs Control of digital outputs RW U16
0x3005 0 Digital inputs Status of digital inputs RO U16
- FI parameter FI parameter
Largest
Subindex
Largest
Subindex
Largest
Subindex
Largest
Subindex
- 3005
hex
(see parameter (P165)):
Number of control word elements RO U8
Number of status word elements RO U8
Number of setpoint elements RO U8
Number of actual value elements RO U8
hex
)
BU 0260 GB Subject to technical amendments 55
Page 56

Supplementary Manual CANopen for NORDAC SK 20E
4.9.5 Error codes – cancellation of parameter communication
The following table gives an overview of the possible error codes which may be generated on cancellation of
parameter communication.
Error code Description
0x0503 0000 Toggle bit unchanged
0x0504 0000 SDO timeout message
0x0504 0001 Client/Server command invalid / unknown
0x0504 0005 No memory
0x0601 0000 Illegal access to an object
0x0601 0001 Access to write-only parameter
0x0601 0002 Access to read-only object
0x0602 0000 Object does not exist in object dictionary
0x0604 0041 Object cannot be mapped in PDO
0x0604 0042 Object exceeds PDO length
0x0604 0043 Parameter incompatibility
0x0604 0047 Module internally incompatible
0x0606 0000 Access failure due to hardware error
0x0607 0010 Data type or parameter length do not match
0x0607 0012 Data type incorrect, parameter length too long
0x0607 0013 Data type incorrect, parameter length too short
0x0609 0011 Sub-Index of parameter does not exist
0x0609 0030 Parameter value range overflow
0x0609 0031 Parameter value range overflow
0x0609 0032 Parameter value range undershot
0x0800 0020 Data transfer or storage not possible
0x0800 0021 Data transfer or storage not possible; reason: local control
4.9.6 Error messages (EMCY message)
The following error groups are defined in the communication profile DS-301.
Error Code (hex) Significance
00xx No error
10xx Undefined error type
20xx Current error
30xx Voltage error
40xx Temperature error
50xx Hardware error
60xx Software error
70xx Additional module
80xx Communication
90xx External error
FF00 Specific to device
56 Subject to technical amendments BU 0260 GB
Page 57

The allocation of special error codes for Nord inverters is carried out as follows:
Error code FI error number (corresponds to (P700)) Explanation
0x1000 ---
0x4210 1.0 / 1.1
0x4310 2.0 / 2.1 / 2.2
0x2310 3.0
0x7112 3.1
0x2311 3.2
0x2312 3.3
0x2200 4.0 / 4.1
0x3210 5.0
0x3110 5.1
0x3230 6.0
0x3120 6.1
0x3130 7.0
0x6310 8.0
0x5530 8.1 / 8.2
0x8100 10.0 / 10.1 / 10.2
0x8111 10.3 / 10.4 / 10.5 / 10.6 / 10.7 / 10.9
0x5000 10.8
0x5110 11.0
0x9000 12.0
0x7305 13.0
0x8400 13.1
0x8300 13.2
0x7120 16.0 / 16.1
0x5300 17.0
0x7120 18.0
0x7120 19.0
0x5510 20.0
0x6000 20.1 / 20.2 / 20.3 / 20.4 / 20.5 / 20.6 / 20.7
0x5520 20.8
0x6000 20.9 / 21.0 / 21.1 / 21.2 / 21.3
0x8110 --- CAN reception overflow (message lost)
0x8111 --- CAN reception overflow (message lost)
0x8120 --- Passive CAN error
0x8130 --- CAN Guarding / Heartbeat error detected
0x8210 --- PDO length error
0x8220 --- PDO length error (too long)
The error number transmitted by FI is not known to
the technology unit. It must be read out via (P700)
or an actual value.
Meaning:
see frequency inverter manual.
4 Commissioning
BU 0260 GB Subject to technical amendments 57
Page 58

Supplementary Manual CANopen for NORDAC SK 20E
5 Parameterisation
In order to enable communication via CANopen, the frequency inverter and the CANopen Technology Unit
must be parameterised accordingly.
With the CANopen protocol, the inverter parameters are mapped in the range above 2000
parameterisation via the bus, 2000
→ 2000
hex
+1FD
=21FD
hex
hex
).
must be added to the parameter numbers (e.g. (P508): 508
hex
i.e. for
hex
= 1FD
dez
5.1 Parameterising the SK 200E frequency inverter
The following list of parameters for the frequency inverter series SK 200E are directly relevant for the operation
of the frequency inverter via CANopen. A complete list of parameters for the frequency inverter LEDs (SK
200E) can be found in the relevant manual (BU0200).
5.1.1 Basic parameters (P100)
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
Parameter
set
hex
P120 … [-01]
...
… [-04]
0 ... 2
{ 1 }
Option monitoring
Array levels:
… [-01] = Extension 1 (BUS-TB)
… [-02] = Extension 2 (IO-TB)
… [-03] = Extension 3 (reserved)
… [-04] = Extension 4 (reserved)
S
Setting value for each array:
0 = Monitoring OFF
1 = Auto, communication is only monitored if an
existing communication is interrupted. If a
module which was previously present is not
found when the network is switched on, this
does not
Monitoring only becomes active when the
extension begins communication with the FI.
2 = Monitoring active immediately; the FI starts
monitoring the corresponding module
immediately after it is switched on. If the
module is not detected on switch-on, the FI
remains in the status "not ready for switch-on"
for 5 seconds and then triggers an error
message.
result in an error.
58 Subject to technical amendments BU 0260 GB
Page 59

5.1.2 Control terminal parameters (P400)
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
5 Parameterisation
Parameter
set
P420 … [-01]
...
… [-04]
0 ... 72
{ [-01] = 01 }
{ [-02] = 02 }
{ [-03] = 04 }
{ [-04] = 05 }
Digital inputs 1 to 4
In the SK 200E, up to 4 freely programmable digital inputs are available. The only restriction is
with the versions SK 215E and SK 235E. Here, the fourth digital input is always the input for the
function "Safe Stop".
… [-01] = Digital input 1 (DIN1), Enable right as factory setting, control terminal 21
… [-02] = Digital input 2 (DIN2), Enable left as factory setting, control terminal 22
… [-03] = Digital input 3 (DIN3), fixed frequency 1 (P465 [-01]) as factory setting, control
terminal 23
… [-04] = Digital input 4 (DIN4), fixed frequency 2 (P465 [-02]) as factory setting, not with SK
215/235E "Safe Stop", control terminal 24
Various functions can be programmed. For the complete list, please refer to the SK 200E
frequency inverter manual (BU0200).
NOTE: The additional digital inputs of the field bus group are managed via parameter (P480).
Except...
Value Function Description Signal
00
No function Input switched off. ---
…
14 1
Remote control
…
1
Also effective for bus control (RS232, RS485, CANbus, CANopen, DeviceNet, Profibus, InterBus, AS-Interface)
With bus system control, low level switches the control to control
via control terminals.
High
Parameter
{Factory setting}
P480 ... [-01]
...
... [-12]
0 ... 72
{ [-01] = 01 }
{ [-02] = 02 }
{ [-03] = 05 }
{ [-04] = 12 }
{ [-05...-12] = 00 }
Setting value / Description / Note Device Supervisor
Function bus I/O In Bits
The bus I/O In Bits are perceived as digital inputs. They can be set to the same functions
(P420).
These I/O bits can also be used in combination with the AS Interface (SK 225E or SK 235E) or
the I/O extension (SK CU4-IOE or SK TU4-IOE).
… [-01] = Bus I/O In Bit 0
… [-02] = Bus I/O In Bit 1
… [-03] = Bus I/O In Bit 2
… [-04] = Bus I/O In Bit 3
… [-05] = Bus I/O In Bit 4
… [-06] = Bus I/O In Bit 5
The possible functions for the bus In bits can be found in the table of functions for the digital
inputs in parameter (P420).
… [-07] = Bus I/O In Bit 6
… [-08] = Bus I/O In Bit 7
… [-09] = Flag 1
… [-10] = Flag 2
… [-11] = Bit 8 BUS control word
… [-12] = Bit 9 BUS control word
Parameter
set
BU 0260 GB Subject to technical amendments 59
Page 60

Supplementary Manual CANopen for NORDAC SK 20E
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
Parameter
set
P481 ... [-01]
...
... [-10]
0 ... 39
{ all 0 }
P482 ... [-01]
...
... [-08]
-400 … 400 %
{ all 100 }
Function Bus I/O Out bits
The bus I/O Out bits are perceived as multi-function relay outputs. They can be set to the same
functions (P434).
These I/O bits can also be used in combination with the AS Interface (SK 225E or SK 235E) or
the I/O extension (SK CU4-IOE or SK TU4-IOE).
… [-01] = Bus I/O Out Bit 0
… [-02] = Bus I/O Out Bit 1
… [-03] = Bus I/O Out Bit 2
… [-04] = Bus I/O Out Bit 3
… [-05] = Bus I/O Out Bit 4
… [-06] = Bus I/O Out Bit 5
The possible functions for the bus Out bits can be found in the table of functions for the relay
(P434)
… [-07] =Flag 1
… [-08] = Flag 2
… [-09] = Bit 10 BUS status word
… [-10] = Bit 13 BUS status word
Standardisation of bus I/O Out bits
Adjustment of the limit values of the bus Out bits. For a negative value, the output function will
be output negative.
Once the limit value is reached and positive values are delivered, the output produces a High
signal, for negative setting values a Low signal.
P483 ... [-01]
...
... [-08]
1 … 100 %
{ all 10 }
Hysteresis of bus I/O Out bits
Difference between switch-on and switch-off point to prevent oscillation of the output signal.
S
60 Subject to technical amendments BU 0260 GB
Page 61

5.1.3 Supplementary parameter (P500)
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
5 Parameterisation
Parameter
set
P509 Control word source
0 ... 4
{ 0 }
*) Keyboard control (SimpleBox, ParameterBox, PotentiometerBox) is disabled,
NOTE:
P510 ... [-01]
... [-02]
0 ... 4
{ [-01] = 0 }
{ [-02] = 0 }
Selection of the interface via which the FI is controlled.
0 = Control terminals or keyboard control** with the SimpleBox (if (P510)=0), the
ParameterBox or via BUS I/O Bits.
1 = Only control terminals *, the FI can only be controlled via the digital and analog input
signals or via the bus I/O bits.
2 = USS *, the control signals (enable, rotation direction, etc.) are transferred via the RS485
interface, the setpoint via the analog input or the fixed frequencies.
3 = System bus*
4 = System bus broadcast *
parameterisation is still possible.
**) If the communication during keyboard control is interrupted (time out 0.5 sec), the
FI will disable without an error message.
For details of the optional bus systems, please refer to Manual BU 0250.
As an alternative to setting the parameter, System Bus Broadcast can be selected with DIP
switch 3.
- www.nord.com
Setpoint source
Selection of the setpoint source to be parameterised.
… [-01] = Main setpoint source … [-02] = Subsidiary setpoint source
Selection of the interface via which the FI receives the setpoint.
0 = Auto:the source of the auxiliary setpoint is
automatically derived from the setting in the
parameter P509 >Interface<
1 = Control terminals, digital and analog inputs
control the frequency, including fixed frequencies
S
–
S
2 = USS
3 = System bus
4 = System bus broadcast
P513 Telegram downtime
-0.1 / 0.0 /
0.1 ... 100.0 s
{ 0.0 }
BU 0260 GB Subject to technical amendments 61
Monitoring function of the active bus interface. Following receipt of a valid telegram, the next
one must arrive within the set period. Otherwise the FI reports an error and switches off with the
error message E010 >Bus Time Out<.
0.0 = Off: Monitoring is switched off.
-0.1 = No error: Even if communication between BusBox and FI is interrupted (e.g. 24V error,
Box removed, etc.), the FI will continue to operate unchanged.
Note:
In BUS mode (e.g.: CANopen), monitoring is controlled via parameter (P120). Settings in
parameter (P513) therefore have no effect.
Exception:
Setting {-0,1}
S
Page 62

Supplementary Manual CANopen for NORDAC SK 20E
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
Parameter
set
P514 CAN baud rate (system bus)
0 ... 7
{ 5 }**
Setting of the transfer rate (transfer speed) via the system bus interface. All bus subscribers
must have the same baud rate setting.
0 = 10kBaud
1 = 20kBaud
2 = 50kBaud
*) Safe operation cannot be guaranteed
**) for communication with the bus module, the parameter must be left at the factory setting
(250kBaud) otherwise no communication is possible.
P515 ... [-01]
…
... [-03]
0 ... 255 dec
{ all 32 dec}
or { all 20 hex}
NOTE:
CAN address (system bus)
Setting of the system bus address.
… [-01] = Receive address for system bus
… [-02] = Broadcast – Receive address for system bus (slave)
… [-02] = Broadcast – Transmit address for system bus (master)
If up to four SK 200E are to be linked via the system bus, the addresses must be set as follows
FI 1 = 32, FI 2 = 34, FI 3 = 36, FI 4 = 38.
The system bus addresses should be set via the DIP switches 1/2 (Section 2.2.3 ).
3 = 100kBaud
4 = 125kBaud
5 = 250kBaud**
S
6 = 500kBaud
7 = 1Mbaud *
S
62 Subject to technical amendments BU 0260 GB
Page 63

5 Parameterisation
Parameter
{Factory setting}
P543 … [-01]
...
… [-03]
0 ... 22
{ [-01] = 01 }
{ [-02] = 04 }
{ [-03] = 09 }
Setting value / Description / Note Device Supervisor
Actual bus value 1 3
The return value can be selected for bus actuation in this parameter.
NOTE: For further details, please refer to the description for (P418).
… [-01] = Actual bus value 1
… [-02] = Actual bus value 2
… [-03] = Actual bus value 3
Possible values which can be set:
0 = Off
1 = Actual frequency
2 = Actual speed
3 = Current
4 = Torque current (100% = P112)
5 = State of digital inputs and outputs
6 = ... 7 Reserved
8 = Setpoint frequency
9 = Error number
10 = ... 11 Reserved
12 = Bus Out bits 0...7
13 = ... 16 Reserved
17 = Value analog input 1 (P400)
18 = Value analog input 2 (P405)
2
19 = Setpoint frequency master value (P503)
20 = Setpoint frequency after master value ramp
21 = Actual frequency without master value slip
22 = Speed from encoder
S P
Parameter
set
P546 … [-01]
...
… [-03]
0 ... 24
{ [-01] = 01 }
{ [-02] = 00 }
{ [-03] = 00 }
Function Bus setpoint 1 ... 3
In this parameter, a function is allocated to the output setpoint during bus actuation.
NOTE: For further details, please refer to the description for (P400).
… [-01] = Actual bus value 1
… [-02] = Actual bus value 2
… [-03] = Actual bus value 3
Possible values which can be set:
0 = Off
1 = Setpoint frequency (16 bit)
2 = Frequency addition
3 = Frequency subtraction
4 = Minimum frequency
5 = Maximum frequency
6 = PI process controller actual value
7 = PI process controller setpoint
8 = Actual frequency PID
9 = Actual PID frequency limited
10 = Actual PID frequency monitored
11 = Limiting torque current
12 = Torque current switch-off limit
13 = Limiting current
14 = Current switch-off limit
15 = Ramp time
16 = Lead torque (P214) multiplication
17 = Servo mode torque
18 = Curve travel calculator
19 = Digital In bits 0...7
20 = ...24 reserved for Posicon
S P
2
The assignment of the digital inputs for P543 = 5
Bit 0 = DigIn 1 Bit 1 = DigIn 2 Bit 2 = DigIn 3 Bit 3 = DigIn 4
Bit 4 = Reserved Bit 5 = Reserved Bit 6 = Reserved Bit 7 = Reserved
Bit 8 = Reserved Bit 9 = Reserved Bit 10 = Reserved Bit 11 = Reserved
Bit 12 = Out 1 Bit 13 = Out 2 Bit 14 = Reserved Bit 15 = Reserved
BU 0260 GB Subject to technical amendments 63
Page 64

Supplementary Manual CANopen for NORDAC SK 20E
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
Parameter
set
P552 … [-01]
… [-02]
0 / 0.1 … 100.0 ms
{ 0 }
System bus master cycle time
In this parameter, the cycle time for the system bus master mode and the CAN open encoder is
set (see P503/514/515):
… [01] = Cycle time for system bus master functions
… [02] = Cycle time for system absolute value encoder
With the setting 0 = "Auto" the default value (see table) is used.
According to the baud rate set, there are different minimum values for the actual cycle time:
Baud rate Minimum value tZ Default system bus master Default system bus
10kBaud 10ms 50ms 20ms
20kBaud 10ms 25ms 20ms
50kBaud 5ms 10ms 10ms
100kBaud 2ms 5ms 5ms
125kBaud 2ms 5ms 5ms
250kBaud 1ms 5ms 2ms
500kBaud 1ms 5ms 2ms
1000kBaud 1ms 5ms 2ms
P560 Save in EEPROM
0 ... 1
{ 1 }
0 = Changes to the parameter settings are no longer saved on the EEPROM. Previously
saved settings remain stored, even if the FI is disconnected from the mains; however
new changes are not saved after a mains failure.
1 = All parameter changes are automatically written to the EEPROM and remain stored there
even if the FI is disconnected from the mains supply.
NOTE: If BUS communication is used to implement parameter changes, it must be
ensured that the maximum number of write cycles (100,000 x) in the EEPROM is
not exceeded.
S
S
64 Subject to technical amendments BU 0260 GB
Page 65

5.1.4 Information parameters (P700)
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
5 Parameterisation
Parameter
set
P700 Current error
0.0 ... 21.4 Current error present. Further details are described in the frequency inverter manual (BU0200).
SimpleBox: Descriptions of the individual error numbers can be found under "Error messages".
ParameterBox: Errors are displayed in plain text, further information can be found under "Error
messages".
P701 ... [-01]
...
... [-05]
0.0 ... 21.4 This parameter stores the last 5 faults. Further details are described in the frequency inverter
Last fault 1...5
manual (BU0200).
With the SimpleBox the corresponding memory location 1...5 (Array parameter), must be
selected and confirmed with the ENTER key in order to read the stored error code.
P740 ... [-01]
Process data bus In
…
... [-13]
0000 ... FFFF (hex) This parameter provides information about the actual control word (STW) and the setpoints
(SW1-3) that are transferred via the bus systems.
For values to be displayed, a bus system must be selected in P509.
… [-01 ] = Control word
… [-02] = Setpoint 1 (P546 [-01])
… [-03] = Setpoint 2 (P546 [-02])
… [-04] = Setpoint 3 (P546 [-03])
… [-05 ] = Bus I/O In bits (P480)
… [-06 ] = Parameter data In 1
… [-07 ] = Parameter data In 2
… [-08 ] = Parameter data In 3
… [-09 ] = Parameter data In 4
… [-10 ] = Parameter data In 5
… [-11 ] = Setpoint 1
… [-12 ] = Setpoint 2
… [-13 ] = Setpoint 3
Control word, source from P509.
Setpoint data from main setpoint P510 - 01.
The displayed value depicts all Bus In bit sources
linked with OR.
Data during parameter transfer: Order label (AK),
Parameter number (PNU), Index (IND), Parameter
value (PWE 1/2)
Setpoint data from master function value
(Broadcast), if P509/510 = 4 (P502/P503)
S
BU 0260 GB Subject to technical amendments 65
Page 66

Supplementary Manual CANopen for NORDAC SK 20E
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
Parameter
set
P741 ... [-01]
...
... [-10]
0000 ... FFFF (hex) This parameter provides information about the actual status word and the actual values that are
Process data bus Out
transferred via the bus systems.
… [-01 ] = Status word
... [-02] = Actual value 1 (P543 [-01])
... [-03] = Actual value 2 (P543 [-02])
... [-04] = Actual value 3 (P543 [-03])
... [-05] = Bus I/O Out Bit (P481)
… [-06 ] = Parameter data Out 1
… [-07 ] = Parameter data Out 2
… [-08 ] = Parameter data Out 3
… [-09 ] = Parameter data Out 4
… [-10 ] = Parameter data Out 5
Status word
The displayed value depicts all bus Out bit sources
linked with OR.
Data during parameter transfer.
S
P748 System bus status
0000 ... FFFF (hex)
or
0 ... 65535 (dec)
Shows the status of the system bus.
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 8
Bit 9
Bit 10
24V Bus supply voltage
CANbus in "Bus Warning" status
CANbus in "Bus Off" status
Bus module is online
Additional module 1 is online
Additional module 2 is online
The protocol of the CAN module is 0 = CAN / 1 = CANopen
Vacant
"Bootup Message" sent
CANopen NMT state
CANopen NMT state
CANopen NMT state Bit 10 Bit 9
Stopped
Pre-Operational
Operational
P749 DIP switch status
0
0
1
0
1
0
0000 ... 00FF (hex)
or
0 ... 255 (dec)
This parameter shows the current setting of the FI DIP switch (Section 2.2.3 "Configuration").
Bit 0
Bit 1
Bit 2
Bit 3
DIP switch 1
DIP switch 2
DIP switch 3
DIP switch 4
Bit 4
Bit 5
Bit 6
Bit 7
DIP switch 5
DIP switch 6
DIP switch 7
DIP switch 8
66 Subject to technical amendments BU 0260 GB
Page 67

5 Parameterisation
5.2 Parameterisation of the bus module (SK CU4-… or SK TU4-…)
The following parameters affect the bus modules.
With access via CANopen, 0x2000 must be added to the parameter. Counting of the sub-indices begins with 1.
5.2.1 BUS module standard parameters (P150)
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
Parameter
set
P150 Set relays
0 ... 4
{ 0 }
0 = Via bus
1 = Outputs OFF
2 = Output 1 to (DO1)
3 = Output 2 to (DO2)
4 = Outputs 1 and 2 ON
P151 Timeout for external bus
0 ... 32767 ms
{ 0 }
Monitoring function of the active bus technology unit. Following receipt of a valid telegram, the
next one must arrive within the set period. Otherwise the inverter reports an error and switches
off with the error message E010 / E10.2 >Bus Time Out< >Bus Time Out<.
0 = OFF: Monitoring is switched off.
Behaviour is identical to parameter (P513) telegram timeout for SK 200E.
P152 Factory setting
0 ... 1
{ 0 }
By selecting the appropriate value and confirming it with the ENTER key, the selected
parameter range is entered in the factory setting. Once the setting has been made, the value of
the parameter returns automatically to 0.
0 = No change:Does not change the parameterisation.
1 = Load factory settings: The complete parameterisation of the FI reverts to the factory
setting. All originally parameterised data are lost.
BU 0260 GB Subject to technical amendments 67
Page 68

Supplementary Manual CANopen for NORDAC SK 20E
5.2.2 CANopen parameter (P160)
This parameter reflects the 0x1xxx communication parameters of CANopen. Therefore they can be read out or
set by means of NORDCON or a ParameterBox. A summary of the objects can be found in Sections 8.4.2 and
8.4.3.
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
P160 ... [-01]
...
... [-10]
0 ... 4
{ [-01] = 3 }
{ [-02] = 3 }
{ [-03] = 0 }
{ [-04] = 0 }
{ [-05] = 0 }
{ [-06] = 3 }
{ [-07] = 3 }
{ [-08] = 3 }
{ [-09] = 3 }
{ [-10] = 0 }
COB-ID ON/OFF
Sets the validity of the SDO and PDO objects.
(see Objects 1200
[-01] = Sync Message*
[-02] = SDO1**
[-03] = SDO2 (FI 2)
[-04] = SDO3 (FI 3)
[-05] = SDO4 (FI 4)
Possible setting values for Array [-02] to [-10]:
0 = Transmit and Receive channel off
1 = Receive channel on
2 = Transmit channel on
3 = Transmit and Receive channel on
* Setting here 0 = "OFF" 1 - 3 = "ON"
** Read Only
*** Writing access only permitted for Pre-Operational
(hex)
(FI 1)
… 1203
(hex)
, 1400
(hex)
…1404
and 1800
(hex)
(hex)
…1804
(hex)
[-06] = PDO1*** (FI 1)
[-07] = PDO2*** (FI 2)
[-08] = PDO3*** (FI 3)
[-09] = PDO4*** (FI 4)
[-10] = PDO5*** (bus module)
Parameter
set
, each Sub-Index 1)
P161 ... [-01]
...
... [-19]
0 ... 7FF
(hex)
{see table on right}
COB-ID
Definition of the COB Index of individual SDO and PDO objects
(see objects 1005
1400
Array
[-01] = COB-ID Sync
[-02] = SDO1 TX*
[-03] = SDO1 RX* (FI 1)
[-04] = SDO2 TX (FI 2)
[-05] = SDO2 RX (FI 2)
[-06] = SDO3 TX
[-07] = SDO3 RX (FI 3)
[-08] = SDO4 TX (FI 4)
[-09] = SDO4 RX (FI 4)
* Read Only
** Writing access only permitted for Pre-Operational
…1404
(hex)
Message
und 1200
(hex)
and1800
(hex)
(FI 1)
(FI 3)
… 1203
(hex)
…1804
(hex)
Factory setting
{ 0x0080 }
{ 0x0580+Addr.}
{ 0x0600+Addr.}
{ 0x02C0+Addr.}
{ 0x0340+Addr.}
{ 0x03C0+Addr.}
{ 0x0440+Addr.}
{ 0x04C0+Addr.}
{ 0x0540+Addr.}
, Sub-index 1 - Rx, Sub-index 2 - Tx,
(hex)
, each sub-index 1)
(hex)
Array
[-10] = PDO1 TX**
(FI 1)
[-11] = PDO1 RX** (FI 1)
[-12] = PDO2 TX**
(FI 2)
[-13] = PDO2 RX** (FI 2)
[-14] = PDO3 TX**
[-15] = PDO3 RX**
(FI 3)
(FI 3)
[-16] = PDO4 TX** (FI 4)
[-17] = PDO4 RX** (FI 4)
[-18] = PDO5 TX**
(bus module)
[-19] = PDO5 RX**(bus module)
Factory setting
{ 0x0180+Addr.}
{ 0x0200+Addr.}
{ 0x0280+Addr.}
{ 0x0300+Addr.}
{ 0x0380+Addr.}
{ 0x0400+Addr.}
{ 0x0480+Addr.}
{ 0x0500+Addr.}
{ 0x01C0+Addr.}
{ 0x0240+Addr.}
68 Subject to technical amendments BU 0260 GB
Page 69

5 Parameterisation
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
P162 ... [-01]
...
... [-10]
0 ... 255
{ 255 }
PDO transmission type
Setting of transmission type.
(see objects 1400
[-01] = PDO1 TX (FI 1)
[-02] = PDO1 RX (FI 1)
[-03] = PDO2 TX (FI 2)
[-04] = PDO2 RX (FI 2)
[-05] = PDO3 TX (FI 3)
P163 ... [-01]
...
... [-05]
0 ... 3276.7 ms
{ 10.0 }
TxPDO Inhibit time
Determines the minimum interval between the transmission of the same COB-IDs.
(see objects 1800
[-01] = PDO1 (FI 1)
[-02] = PDO2 (FI 2)
[-03] = PDO3
[-04] = PDO4 (FI 4)
[-05] = PDO5
…1404
(hex)
…1804
(hex)
(FI 3)
(bus module)
and 1800
(hex)
, each Sub-index 3)
(hex)
(hex)
…1804
[-06] = PDO3 RX
, each Sub-index 2)
(hex)
(FI 3)
[-07] = PDO4 TX (FI 4)
[-08] = PDO4 RX
(FI 4)
[-09] = PDO5 TX (bus module)
[-10] = PDO5 RX
(bus module)
Parameter
set
P164 ... [-01]
...
... [-05]
0 ... 32767 ms
{ 250 }
TxPDO Event time
Defines a time interval, after which the process data (PDO) are transmitted.
(see objects 1800
[-01] = PDO1 (FI 1)
[-02] = PDO2
[-03] = PDO3 (FI 3)
[-04] = PDO4
[-05] = PDO5 (bus module)
0 = "OFF"
(hex)
(FI 2)
(FI 4)
…1804
, each Sub-index 5)
(hex)
BU 0260 GB Subject to technical amendments 69
Page 70

Supplementary Manual CANopen for NORDAC SK 20E
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
P165 ... [-01]
...
... [-34]
0 ... FFFFFFFF
(hex)
{see table on right}
PDO mapping parameter
Definition of the mapping for transmitted and received process data.
(see objects 1600
(PDO1 = FI1, PDO2 = FI2, PDO3 = FI3, PDO4 = FI4 PDO5 = Bus module)
Array
[-01] = PDO1 Tx Value 1
[-02] = PDO1 Tx Value 2
[-03] = PDO1 Tx Value 3
[-04] = PDO1 Tx Value 4
[-05] = PDO1 Rx Value 1
[-06] = PDO1 Rx Value 2
[-07] = PDO1 Rx Value 3
[-08] = PDO1 Rx Value 4
[-09] = PDO2 Tx Value 1
[-10] = PDO2 Tx Value 2
[-11] = PDO2 Tx Value 3
[-12] = PDO2 Tx Value 4
[-13] = PDO2 Rx Value 1
[-14] = PDO2 Rx Value 2
[-15] = PDO2 Rx Value 3
[-16] = PDO2 Rx Value 4
Note: [-33] and [-34] (PDO5) is the device itself, therefore only 2 bytes)
… 1604
(hex)
und 1A00
(hex)
Factory setting
{ 0x30000110 }
{ 0x30020110 }
{ 0x30020210 }
{ 0x30020310 }
{ 0x30010110 }
{ 0x30030110 }
{ 0x30030210 }
{ 0x30030310 }
{ 0x30000210 }
{ 0x30020410 }
{ 0x30020510 }
{ 0x30020610 }
{ 0x30010210 }
{ 0x30030410 }
{ 0x30030510 }
{ 0x30030610 }
…1A04
(hex)
, each Sub-index 1 - 4)
(hex)
Array
[-17] = PDO3 Tx Value 1
[-18] = PDO3 Tx Value 2
[-19] = PDO3 Tx Value 3
[-20] = PDO3 Tx Value 4
[-21] = PDO3 Rx Value 1
[-22] = PDO3 Rx Value 2
[-23] = PDO3 Rx Value 3
[-24] = PDO3 Rx Value 4
[-25] = PDO4 Tx Value 1
[-26] = PDO4 Tx Value 2
[-27] = PDO4 Tx Value 3
[-28] = PDO4 Tx Value 4
[-29] = PDO4 Rx Value 1
[-30] = PDO4 Rx Value 2
[-31] = PDO4 Rx Value 3
[-32] = PDO4 Rx Value 4
[-33] = PDO5 Tx Value 1
[-34] = PDO5 Rx Value 1
Factory setting
{ 0x30000310 }
{ 0x30020710 }
{ 0x30020810 }
{ 0x30020910 }
{ 0x30010110 }
{ 0x30030710 }
{ 0x30030810 }
{ 0x30030910 }
{ 0x30000410 }
{ 0x30020A10 }
{ 0x30020B10 }
{ 0x30020C10 }
{ 0x30010410 }
{ 0x30030A10 }
{ 0x30030B10 }
{ 0x30030C10 }
{ 0x30050010 }
{ 0x30040010 }
Parameter
set
P166 ... [-01]
... [-02]
0 ... 32767 ms
{ 0 }
Timeout control
Defines a time interval for the monitoring of the slave by the master (node-guarding) or .
Definition of the slave transmission interval (Heartbeat).
(see objects 100C
(hex)
and 1017
(hex)
)
[-01] = Guard time
[-02] = Producer Heartbeat time
0 = "OFF"
70 Subject to technical amendments BU 0260 GB
Page 71

5 Parameterisation
Parameter
Setting value / Description / Note Device Supervisor
{Factory setting}
P167
0 ... 255
{ 0 }
Life time factor
Factor for the monitoring of the master by the slave
(see objects 100D
P168 ... [-01]
...
... [-17]
0 ... 3FFF
(hex)
{see table on right}
Profile parameters
Parameter setting for the profile parameters (Velocity Mode of the drive profile DSP 402).
(see objects 6048
Acceleration and deceleration
This results in the unit: rpm/s
(achieved change in [rpm] divided by the time elapsed during the change in [s])
Array
[-01] = Profile:
[-02] = ∆n for acceleration FI 1
[-03] = ∆t for acceleration FI 1
[-04] = ∆n for deceleration FI 1
[-05] = ∆t for deceleration FI 1
[-06] = ∆n for acceleration FI 2
[-07] = ∆t for acceleration FI 2
[-08] = ∆n for deceleration FI 2
[-09] = ∆t for deceleration FI 2
Units: ∆n in [rpm]
0 = "OFF"
0= "OFF"
1= "ON"
∆t in [ms]
)
(hex)
and 6049
(hex)
, each Sub-index 1 - 2)
(hex)
Factory setting
{ 0 }
{ 1500 }
{ 2 }
{ 1500 }
{ 2 }
{ 1500 }
{ 2 }
{ 1500 }
{ 2 }
Array
[-10] = ∆n for acceleration FI 3
[-11] = ∆t for acceleration FI 3
[-12] = ∆n for deceleration FI 3
[-13] = ∆t for deceleration FI 3
[-14] = ∆n for acceleration FI 4
[-15] = ∆t for acceleration FI 4
[-16] = ∆n for deceleration FI 4
[-17] = ∆t for deceleration FI 4
Parameter
set
Factory setting
{ 1500 }
{ 2 }
{ 1500 }
{ 2 }
{ 1500 }
{ 2 }
{ 1500 }
{ 2 }
BU 0260 GB Subject to technical amendments 71
Page 72

Supplementary Manual CANopen for NORDAC SK 20E
5.2.3 BUS module information parameters, general (P170)
Parameter Setting value / Description / Note Device Supervisor
Parameter
set
P170 ... [-01]
... [-02]
0 ... 9999 Current error present. Further details in Section 6.2 "Error messages".
Current error
… [-01 ] = Current module error
… [-02 ] = Last module error
Possible values:
1000 = EEPROM error
1010 = System bus 24V missing
1020 = System bus timeout (see time in P151)
1030 = System bus OFF
Specific to CANopen
5110 = CANopen bus OFF
5111 = CANopen warning
5112 = CANopen overrun
5113 = CANopen invalid address
5120 = CANopen timeout / communication error
P171 ... [-01]
...
... [-03]
0,0 ... 9999.9 This parameter shows the software and revision numbers in the module. Array 03 provides
Software version/ Revision
information about any special versions of the hardware or software A zero stands for the
standard version.
… [-01] = Software version
… [-02] = Software revision
… [-03] = Special version
P172 Configuration
0 ... 2 The version can be queried in this parameter.
Possible values:
0 = Internal module
1 = External module
2 = Bus TO via SPI
72 Subject to technical amendments BU 0260 GB
Page 73

5 Parameterisation
Parameter Setting value / Description / Note Device Supervisor
P173 Module status
0 ... FFFF (hex)
Possible values:
Bit 0 = Bus status “PREOPERATIONAL” (CANopen initialisation active)
Bit 1 = Bus status “OPERATIONAL” (Data exchange active)
Bit 2 = Timeout Node-guarding (NMT- Master Watchdog)
Bit 3 = Time Out (Time in P151)
Bit 4 = CANopen “WARNING”
Bit 5 = CANopen “BUS OFF”
Bit 6 = System bus “BUS WARNING”
Bit 7 = System bus “BUS OFF”
Bit 8 = Status FI 1
Bit 9 = Status FI 1
Bit 10= Status FI 2
Bit 11= Status FI 2
Bit 12= Status FI 3
Bit 13= Status FI 3
Bit 14= Status FI 4
Bit 15= Status FI 4
Status for FI x:
Bit High Bit Low Status
0 0 FI is offline
0 1 unknown FI
1 0 FI is online
1 1 FI missing or switched off
Parameter
set
P174 Digital inputs
0 ... 15 Instantaneous view of input level logic.
Possible values:
Bit 0= Input 1 ((DIN1) (of BUS module))
Bit 1= Input 2 ((DIN2) (of BUS module))
Bit 2= Input 3 ((DIN3) (of BUS module))
Bit 3= Input 4 ((DIN4) (of BUS module))
P175 Digital outputs
0 ... 3 Instantaneous view of output level logic.
Possible values:
Bit 1= Output 1 ((DO1) (of BUS module))
Bit 2= Output 2 ((DO2) (of BUS module))
BU 0260 GB Subject to technical amendments 73
Page 74

Supplementary Manual CANopen for NORDAC SK 20E
Parameter Setting value / Description / Note Device Supervisor
Parameter
set
P176 ... [-01]
...
... [-17]
-32768 ... 32767 Bus data received from CANopen "Master"
Process data bus In
… [-01] = Bus module outputs
… [-02] = Control word FI 1
… [-03] = Setpoint 1 for FI 1
… [-04] = Setpoint 2 for FI 1
… [-05] = Setpoint 3 for FI 1
… [-06] = Control word FI 2
… [-07] = Setpoint 1 for FI 2
… [-08] = Setpoint 2 for FI 2
… [-09] = Setpoint 3 for FI 2
P177 ... [-01]
...
... [-17]
-32768 ... 32767 Bus data transmitted from CANopen "Master"
Process data bus Out
… [-01] = Bus module inputs
… [-02] = Status word FI 1
… [-03] = Actual value 1 for FI 1
… [-04] = Actual value 2 for FI 1
… [-05] = Actual value 3 for FI 1
… [-06] = Status word FI 2
… [-07] = Actual value 1 for FI 2
… [-08] = Actual value 2 for FI 2
… [-09] = Actual value 3 for FI 2
… [-10] = Control word FI 3
… [-11] = Setpoint 1 for FI 3
… [-12] = Setpoint 2 for FI 3
… [-13] = Setpoint 3 for FI 3
… [-14] = Control word FI 4
… [-15] = Setpoint 1 for FI 4
… [-16] = Setpoint 2 for FI 4
… [-17] = Setpoint 3 for FI 4
… [-10] = Status word FI 3
… [-11] = Actual value 1 for FI 3
… [-12] = Actual value 2 for FI 3
… [-13] = Actual value 3 for FI 3
… [-14] = Status word FI 4
… [-15] = Actual value 1 for FI 4
… [-16] = Actual value 2 for FI 4
… [-17] = Actual value 3 for FI 4
74 Subject to technical amendments BU 0260 GB
Page 75

5.2.4 Module information parameters specific to the bus (P180)
Parameter Setting value / Description / Note Device Supervisor
5 Parameterisation
Parameter
set
P180 CANopen address
1 ... 63
Each module transmitting on the bus must be allocated a unique address. After the new setting
of addresses, all the devices on this bus must be restarted by switching the power supply off
and on again.
Setting of addresses (node address / node ID) is only made via DIP- switches (see Section
2.2.3 "Configuration").
An address in the range between 1 and 63 must be defined. The setting "0" (all DIP switches
"OFF") is not permitted. In this case, the address 127 will be displayed in parameter (P180)
P181 CANopen baud rate
0 ... 3
Possible values:
0 = 125 kBaud
1 = 250 kBaud
2 = 500 kBaud
3 = 1 MBaud
Setting of addresses baud rate can only be made via DIP- switches (see Section 2.2.3
"Configuration").
Note:
The restriction of the cable legth for the set baud rate must be taken into account. (Section 8.1.2
"Cable material").
BU 0260 GB Subject to technical amendments 75
Page 76

Supplementary Manual CANopen for NORDAC SK 20E
6 Error monitoring and error messages
6.1 Error monitoring
The majority of bus module and frequency inverter functions and operating data are continuously monitored
and simultaneously compared with limiting values. If a deviation is detected, the bus module or inverter reacts
with a warning or an error message.
For detailed information, please refer to the relevant main manual of the frequency inverter.
Errors cause the frequency inverters to switch off, in order to prevent a device fault.
The following options are available to reset an fault (acknowledge):
1. switching the mains off and on again,
2. by means of a correspondingly programmed digital input
(SK 200E: (P420) [-…], function {12} or
SK 500E: (P420 ... P425), function {12}),
3. by switching off the “enable” on the frequency inverter
(if no
digital input is programmed for acknowledgement),
4. by bus acknowledgement or
5. by P506, the automatic error acknowledgement.
Visualisation of the inverter error codes is made via the frequency inverter (see relevant manual).
Errors which are attributable to bus operation are visualised via the bus module. The precise error message is
displayed in parameter P170.
NOTE
The display of a bus error is shown in the operating display of the SimpleBox SK CSX-3H by
means of the error group number E1000. In order to obtain the precise error number, the
module information parameter P170 must be selected. The current error is shown in Array
[01] of this parameter, the last error is stored in Array [02].
6.1.1 Error monitoring details
Monitoring of bus communication is divided into the following categories:
EMERGENCY messages
The bus module sends a so-called "EMCY Message", if a connected frequency inverter becomes faulty.
According to the CANopen specification DS-301 and DS-402 this message contains a detailed error code
(see also 6.1.2 "EMCY message").
Timeout monitoring
Communication problems are detected with the aid of timeout monitoring. Various versions of the timeout
monitoring can be selected, which either relate to general functionalities ("no bus communication") or to
specific modules ("failure of a participant").
These monitoring modules can be used in various combinations.
76 Subject to technical amendments BU 0260 GB
Page 77

6 Error monitoring and error messages
… of a
relevant
General process data monitoring... Detailed monitoring of subscribers
technology
unit (TB)
… of a
frequency
inverter (FI)
Option
monitoring
Node / Life Guarding Heartbeat
(P151) (P513) (P120) (P166 [-01]) x (P167) (P166[-02])
parameters
relate to... ... basic bus communication ... Bus nodes Bus node
... of the TO ... of the FI ... to the TB
Monitoring by TB FI FI Bus nodes Bus master
Example { 500 ms}
If no further
telegram is
recieved within
500ms after
receipt of a
telegram, an
error is
triggered.
Error code E010 / E10.3 E010 / E10.2 E010 / E10.8
{ 0.5 s }
If no further
telegram is
recieved within
0.5s after receipt
of a telegram, an
error is triggered.
If the
communication
to a module is
interupted, or
the module
cannot be found
on switch-on, an
error message is
triggered.
{ 1 }
{ 250 }x{ 3 }
If the subscriber does not
receive the expected
response within 250ms
of sending a data
package (telegram) or it
does not receive a
further data package
within 750ms (250 ms x
3) of receiving a data
package, an error is
triggered.
The slave sends a
corresponding telegram
every 250 ms, which can
be processed by an
overriding control
system.
E010 / E10.2 /
{ 250 }
or E10.9
Start
Life Guarding
max.
(P166) x (P167)
Master
Slave
Order
Response
Order
Response
Time
in ms
Node Guarding
max. (P166)
Comparison of Node Guarding / Life Guarding
General process data monitoring with a technology unit (SK xU4-…)
The parameter (P152) "Timeout external bus" generally monitors the existence of bus communication. If no
process data is received within the parameterised monitoring time (The content of the process data is
irrelevant) the subscriber assumes that the bus communication to this subscriber is generally faulty and reports
an error.
General monitoring of frequency inverter process data
SK 500E series frequency inverters offer the facility for monitoring the active bus interface by means of the
parameter (P513) "Telegram timeout". If the frequency inverter does not receive a telegram within the time
entered here, it assumes that there is a general fault with the bus communication and reports an error.
Note: With SK 200E series frequency inverters, this function of this parameter is implemented by parameter
(P120). All settings (except { -0.1 }) are then without effect in parameter (P153).
BU 0260 GB Subject to technical amendments 77
Page 78

Supplementary Manual CANopen for NORDAC SK 20E
Option monitoring
With the parameter (P120) "Option monitoring", SK 200E series frequency inverters provide the facility for
monitoring connected technology units (SK xU4-…) with regard to their current functional status. Generally,
this function corresponds to monitoring via parameter (P513). Except for the setting { -0.1 } this parameter
(P513) therefore has no effect.
Node Guarding
The Node Guarding function enables the monitoring of the slave(s) by the master.
If after a query by the master, a response is not received from the slave after after a defined time, an error
message is triggered.
The monitoring interval is defined in parameter (P166[-01]) "Timeout control" / "Guard Time".
Life Guarding
The Life Guarding function enables the monitoring of the master by the slave.
If after the receipt of a protocol and the elapse of a defined time the slave does not receive a further protocol
from the master, an error message is triggered.
The monitoring interval is defined by the combination of parameter (P166[-01]) "Timeout control" / "Guard
time" and )P167) "Life time factor".
Heartbeat monitoring
For overriding monitoring, a "Producer Heartbeat time" can be defined. Activation of the parameter (P166 [-
02]) "Timeout control" / "Producer Heartbeat time" by a value ≠ "0" prompts the slave to the cyclic transmission
of a corresponding protocol
6.1.2 EMCY message
In case of faults with frequency inverters connected to the system, the bus module sends an error message
via the CANopen bus. The identifier of the message is 0x80 + address of the bus module. The message is
structured as follows.
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
Error code Parameter
0x1001
FI-ID
0...3
Not used
The assignment of error codes can be found in Section 4.9.6 "Error messages (EMCY message)".
After the error is reset, the Emergency Object is sent with the error message null.
The Transmit ID for the error telegram is based on the following formula:
800
Node IDxDTransmit I
78 Subject to technical amendments BU 0260 GB
Page 79

6 Error monitoring and error messages
6.2 Error messages
6.2.1 Table of possible error messages (caused by the bus) in the frequency inverter
The following error messages concern bus-related messages which are indicated on the frequency inverter.
A complete list of error messages for the frequency inverter (SK 200E) can be found in the relevant manual
(BU0200).
Error code
display on the
SimpleBox
Group Details in
P700 / P701
E010
10.2 External bus module
10.3 Timeout via (P151)
10.4 External bus module
10.8 External module
10.9 Module not found
Fault
Text in the ParameterBox
telegram timeout
initialisation failure
communication failure
Cause
Remedy
Telegram transfer is faulty.
Check external connection.
Check bus protocol program process.
Check bus master.
Telegram transfer is faulty.
Check watchdog time (P151)
Check physical bus connections
Contains cyclic telegrams
Bus module cannot be accessed
Check bus module power supply
Connection fault / error in the external module to the FI
The module entered in parameter (P120) is not available.
BU 0260 GB Subject to technical amendments 79
Page 80

Supplementary Manual CANopen for NORDAC SK 20E
6.2.2 Table of possible error messages in the bus module
The following error messages concern bus-related messages, which are indicated on the CANopen module
(SK CU4-CAO or SK TU4-CAO(-…)).
Error number
Group Details in
P170
Fault
Text in the ParameterBox
Cause
Remedy
E1000
1000 EEPROM error
1010 System bus 24V missing
1020 System bus timeout
1030 System bus OFF
5110 CANopen bus OFF
5111 CANopen warning
5112 CANopen overrun
5113 Invalid CANopen address
5120 CANopen timeout
Module faulty
Check connections and supply cables
Ensure 24V voltage supply
Check time set in parameter (P151).
Telegram transfer is faulty.
Check external connection.
Check bus protocol program process.
Check bus master.
Check connections and supply cables
Ensure 24V voltage supply
Check bus master.
Subscriber is disconnected from bus
Bus error
No other subscriber present on the system bus
Wiring not correct (cable length, spur cables)
No valid ID (DIP switch)
Message box (message buffer) for the module was
overwritten by a new telegram before processing
Increase master inhibit time
Reduce baud rate
Avoid double assignment of addresses
Comply with address range 1 ... 63
Telegram transfer is faulty.
Check external connection.
Check bus protocol program process.
Check bus master.
80 Subject to technical amendments BU 0260 GB
Page 81

7 CANopen Data transfer
7 CANopen data transfer
CAN / CANopen communication is based on a multi-master principle. Although the network can be overridden
by a so-called NMT master (Network Management Master), this only takes over control of the functions of all
connected nodes (subscribers) and can can change their operating statuses (initialisation / pre-operational /
operational / stopped (previously: prepared)).
Communication between the individual subscribers, both as queries and responses is controlled by the
participants themselves. In principle, all nodes are in a "ready" status. On request from other nodes, or
according to their own requirements all peers are able to sent protocols on the bus (multi-master).
Simultaneous transmission access by several nodes is resolved by a prioritisation of the messages to be sent.
This ensures that the message with the highest priority receives permission for transmission. Messages which
are postponed due to lower priority are then sent.
Therefore a pseudo real-time capability of the systems is ensured, in particular for telegrams with higher
priority* (*with maximum bus load 40%). The priority of a telegram is defined by its identifier. The identifier of a
telegram is comprised of its node address and the type of telegram (e.g.: Emergency Message). This rules out
the double assignment of identifiers. The lower the identifier, the higher its priority.
Communication between subscribers largely complies with the client-server model. The producer-consumer
model only comes into effect for the transfer of process data.
7.1 Protocol
Communication on the bus is carried out with the aid of telegrams on the basis of the CAN protocol. A CAN
protocol consists of an overhead section (addressing, error monitoring ...) and a reference data section (for
process control). CANopen is based on this structure, whereby two groups of reference data telegrams have
been defined for the process.
In addition to the length of 8 bytes, the "addressing" via identifier is identical for both types of telegram.
The primary differentiating features are the following:
Property SDO telegram PDO telegram
Transfer of parameter data (parameterisation) Yes No
Exchange of process data Not usual (not real-time) Yes
Data processing model Client - Server Producer - Consumer
Response to query necessary Yes (handshake) No
Data rate Low High
Required node operating status Operational
Pre-Operational
Operational
7.2 Structure of reference data in USS standard
After switch-on a node runs through an initialisation phase and automatically changes to the operating status
"Pre-Operational". In this state it is able to communicate via SDOs. The node only attains full operational
readiness by setting into the operating status "Operational", and is then entitled to exchange data via PDOs.
The parameters of a node are stored in an object dictionary, whose structure corresponds to that of other bus
systems. Therefore there is a basic compatibility between various bus systems.
As process data is also stored in the object dictionary of the node, this can also be processed via SDOs.
BU 0260 GB Subject to technical amendments 81
Page 82

Supplementary Manual CANopen for NORDAC SK 20E
Example: Excerpt from the object dictionary of an SK 200E.
Object dictionary
Index Sub-index Data Comments
…
2102 - 200 Parameter (P102), setting 2.00s)
2103 - 200 Parameter (P103), setting 2.00s)
…
Structure of an SDO
Control byte Index Sub-index Data
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 Byte 5 Byte 6 Byte 7
E.g.:
"Download"
"Parameter number"
E.g.:
E.g.:
"Array"
"Parameter values"
E.g.:
SDOs (Service Data Objects) enable access to all device parameters from the object dictionary. They enable
these to be changes and are used for status queries. An SDO consists of eight bytes, of which the first four are
occupied with protocol information (e.g.: data request / parameter number). The remaining four bytes define
the associated data content (e.g.: setting values)
If the length of four bytes is not sufficient, the data contents is divided over several SDOs (segmented). Here,
for all "data SDOs" which follow the first SDO, seven of the eight bytes are available for data transfer. The last
segment contains an "End code".
The exchange of SDOs is carried out by means of a handshake process, i.e. queries are always confirmed
with a response. However, segmented messages are only confirmed once, after receipt of the last associated
SDO. Exchange of new messages is only possible after confirmation of or response to the previous message.
Node 1 Node 2
Or der telegr am
Protocol information Object data
Processing
Protocol information Object data
Response telegram
Object de finition Obj ec t content
Diagram: Telegram traffic / structure of reference data area
On the other hand, PDOs (Process Data Objects) serve exclusively for the exchange of process data. A PDO
sent by a node is received by all connected bus subscribers. Each subscriber, which recognises that the
message is relevant on the basis of the identifier, processes it accordingly, however without acknowledgement.
Therefore a message can also be accessed by several subscribers simultaneously (multicast).
The most important advantage of a PDO in comparison with an SDO is that due to the lack of protocol
information, all 8 bytes are available for the exchange of process data. The associated increase in bandwidth
increases the flow of process data by a large factor, which is an advantage for time-critical applications.
82 Subject to technical amendments BU 0260 GB
Page 83

7 CANopen Data transfer
ATTENTION
If parameter changes are made, care must be taken that the maximum number of
permissible writing cycles to the frequency inverter EEPROM (100,000 cycles) is not
exceeded. I.e. continuous cyclical writing must be prevented.
For certain applications it is sufficient if the values are only saved in the RAM memory of the
frequency inverter. The corresponding setting is made via parameter (P560) "Save in
EEPROM".
Note: This does not apply to parameters which relate to the bus module ((P150) to (P199)).
Here too, the EEPROM only permits a maximum of 100,000 writing cycles. However, the
parameters are only written into the EEPROM if access is made via the ParameterBox or
NORDCON, or if the parameter values are changed in the bus module by means of SDOs.
7.2.1 Process data (PZD) in USS standard
In the process data area PZD, control words and setpoints or status words and actual values are transferred
from one node (frequency inverter) to another. The structure of the PZD area is always the same with regard to
the sequence of its elements (words (= 2 bytes each)) whereby the processing of the individual bytes is carried
out by the typical CAN method according to the "Little Endian" format.
The process data area of the reference data has the following structure:
- STW: Control Word; length 16 bit, order telegram contains control bits (e.g. enable, rapid stop, error
acknowledgement)
- ZSW: Status Word; length 16 bit, response telegram contains status bits (e.g. FI running, fault)
- SW1..3: Setpoints; maximum 3 possible, 16 or 32 bit, order telegram
e.g. frequency setpoint, position setpoint, torque setpoint
- IW1..3: Actual Values; maximum 3 possible, 16 or 32 bit, response telegram
e.g. actual frequency value, actual position value, actual torque value
1. Word
(Byte 0,1)
PZD area with
1x16 bit setpoint
PZD area with up to 3
16 bit setpoints
Note: 32 bit setpoints (e.g.: positions) are comprised of High or Low words (each 16 bit), whereby
according to the Little Endian format, processing starts with the Low word.
STW
ZSW
STW
ZSW
2. Word
(Byte 2,3)
SW1
IW1
SW1
IW1
3. Word
(Byte 4,5)
SW2
IW2
4. Word
(Byte 6,7)
SW3
IW3
BU 0260 GB Subject to technical amendments 83
Page 84

Supplementary Manual CANopen for NORDAC SK 20E
7.2.1.1 Control word (STW)
In the order telegram, in the area of the process data the control word (STW) is transferred to the frequency
inverter as the first word (taking into account the "Little Endian" format). For example, a control word "ready for
switch-on" corresponds to 047E
, whereby in Byte 0 the value 7E
(hex)
and in Byte 1 the value 04
(hex)
(hex)
are
transferred.
PZD1 PZD2 PZD3 PZD4
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
STW SW1 SW2/3 SW2/3
Meaning of the individual bits:
Bit Value Significance Comments
0 0 OFF 1 Return with the brake ramp, at f=0Hz voltage activation
1 ON Standby
1 0 OFF 2
1 Operating condition OFF 2 is cancelled
2 0 OFF 3
1 Operating condition OFF 3 is cancelled
3 0 Disable operation
1 Enable operation Output voltage enabled, run-up to present setpoint.
4 0
1 Operating condition Run-up encoder is enabled
5 0 Stop run-up encoder Freezing of actual setpoint from run-up encoder (hold frequency).
1 Enable run-up encoder Enable setpoint on run-up encoder
6 0 Disable setpoint Selected setpoint is set to zero in the run-up encoder.
1 Enable setpoint Selected setpoint on run-up encoder is activated.
7 0 No acknowledgement With the switch from 0 to 1, errors which are no longer active are acknowledged.
1 Acknowledge
8 0
1 Bit 8 active
9 0
1 Bit 9 active
10 0 PZD invalid The transmitted process data is invalid.
1 PZD valid Valid process data is transferred from the master.
11 0
1 Rotation right Rotation right (priority) is on.
12 0
1 Rotation left Rotation left is on.
13 0/1 Reserved
14 0/1
15 0/1
Disable run-up
encoder
Parameter set switch
Bit 0
Parameter set switch
Bit 1
Disable voltage; the inverter output voltage is switched off, the FI goes into
switch-on disabled status.
Emergency stop with programmed emergency stop time; at f = 0Hz voltage
enable; the FI goes into switch-on disabled status
Disable voltage; the inverter output voltage is switched off, the FI goes into
standby status.
Run-up encoder is set to zero; at f = 0Hz no voltage enable; FI remains in
operation enabled status.
Note: If a digital input is programmed to the function "Error ack.", this bit must not
be set permanently to 1 via the bus (otherwise this will prevent edge detection).
Bus bit 8 from the control word is set. (Only for SK 200E and SK 500E)
For further details of the function please refer to parameter (P480).
Bus bit 9 from the control word is set. (Only for SK 200E and SK 500E)
For further details of the function please refer to parameter (P480).
Note:If setpoints only are transferred via the bus, this bit must be set so that the
transferred setpoint is valid.
00 = Parameter set 1
01 = Parameter set 2
10 = Parameter set 3
11 = Parameter set 4
84 Subject to technical amendments BU 0260 GB
Page 85

7 CANopen Data transfer
7.2.1.2 Status word (ZSW)
In the inverter response telegram, in the area of the process data the status word (ZSW) is transferred as the first
word (taking into account the "Little Endian" format. For example, a status word "ready for switch-on" corresponds
to 0B31
, whereby in Byte 0 the value 31
(hex)
and in Byte 1 the value 0B
(hex)
are transferred.
(hex)
PZD1 PZD2 PZD3 PZD4
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
ZSW IW1 IW2/3 IW2/3
Meaning of the individual bits:
Bit Value Significance Comments
0 0
1 Redy for switch-on Initialisation complete, load relay on, output voltage disabled
1 0 Not operational
1 Standby
2 0 Operation disabled
1 Operation enabled Output voltage enabled, run-up to present setpoint.
3 0 No errors
1 Fault
4 0 OFF 2 OFF 2 disable voltage command active
1 No OFF 2
5 0 OFF 3 OFF 3 rapid stop command active
1 No OFF 3
6 0 No switch-on disable
1 Switch-on disabled Goes to standby status through OUT 1 command
7 0 No warning
1 Warning Drive still in operation, no acknowledgement necessary
8 0 Actual value not O.K.
1 Actual value O.K. Actual value matches the setpoint (setpoint reached)
9 0 Local guidance Local guidance active on device
1 Guidance required The master is called upon to take over the guidance.
10 0
1 Bit 10 active
11 0
1 Rotation right Inverter output voltage has right-hand rotating field
12 0
1 Rotation left Inverter output voltage has left-hand rotating field
13 0
1 Bit 13 active
14 0/1
15 0/1
Not ready for switchon
Actual active
parameter set Bit 0
Actual active
parameter set Bit 1
Causes: No On command, an error has occurred, OFF 2 or OFF 3 active, switchon disable status active.
ON command active, no errors. The inverter can be started with the ENABLE
OPERATION command.
Drive malfunctioning therefore out of order, if acknowledgement is successful, will
go to switch-on disabled status.
Actual value does not match the setpoint (with posicon: Setpoint position not
reached)
(with posicon: Setpoint position reached)
Bus bit 10 from the status word is set. For further details of function, please refer
to parameter P481.
Bus bit 13 from the status word is set. For further details of function, please refer
to parameter P481.
00 = Parameter set 1
01 = Parameter set 2
10 = Parameter set 3
11 = Parameter set 4
BU 0260 GB Subject to technical amendments 85
Page 86

Supplementary Manual CANopen for NORDAC SK 20E
7.2.1.3 Setpoint 1 (SW1)
The function of the first setpoint is set in the parameter "Function bus -setpoint 1" (SK 200E: (P546[01]) or
SK 500E: (P546)) (see relevant frequency inverter manual).
In the order telegram, setpoint 1 follows immediately after the control word. Setpoint 1 is pre-set to the transfer
of a setpoint frequency (16 bit value).
PZD1 PZD2 PZD3 PZD4
STW
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
SW1 SW2 SW3
The setpoint is transferred as an integer in the range -32768 to 32767 (8000 hex to 7FFF hex), whereby 16384
(4000 hex) is exactly 100% and -16383 (C000 hex) corresponds to -100%. Due to this resolution, setpoints
(depending on function) of up to ± 200% can be transferred.
A setpoint of 100% corresponds to the respective nominal value:
Setting 100% is equal to
Off
Setpoint frequency, actual frequency PID, actual
frequency PID limited, actual frequency PID monitored,
frequency addition, frequency subtraction, maximum
frequency
Torque current limit Torque current limit (P112)
Current limit Inverter nominal current
Servo mode torque Nominal torque
Lead torque Lead torque (P214)
Maximum frequency
7.2.1.4 Setpoints 2 and 3 (SW2/3)
In addition to setpoint 1, two further setpoints can be transferred in the words "PZD3" and "PZD4".
PZD1 PZD2 PZD3 PZD4
STW
SW1 SW2 SW3
The definition of these two setpoints corresponds to that of setpoint 1.
If the transfer of a 32 bit setpoint is necessary (Example: position setpoint), this must be divided into two 16 bit
values, i.e. into two PZDs (Position Low and High words). It does not matter in which of the three process
data words (PZD 2 ... 4) the two position words are transferred.
The definition in the frequency inverter can then, for example, be made via the parameters:
PZD3: „Bus function - setpoint 2" (SK 200E: (P546[02]) or SK 500E (P547)) and
PZD4: „Bus function - setpoint 3" (SK 200E: (P546[03]) or SK 500E (P548))
Example
If a position setpoint is to be transferred (Prerequisite: posicon inverter functionality) this can be performed
either as a 16 bit or 32 bit value. The resolution is always 0.001 rotations/step.
As a 16 bit value, a range of +32767 (= 32,
exactly one
PZD word is required in order to transfer the position.
767 revolutions) to -32768 (= -32,768 revolutions) is possible. Here,
As a 32 bit value, the full position range of +/- 50000.000 revolutions is available. Here, exactly two PZD words
are required in order to transfer the position.
86 Subject to technical amendments BU 0260 GB
Page 87

7 CANopen Data transfer
7.2.1.5 Actual value 1 (IW1)
The function of the first setpoint is set in the parameter "Function bus -actual value 1" (SK 200E: (P543[01]) or
SK 500E: (P543)) set (see relevant frequency inverter manual).
In the order telegram, actual value 1 follows immediately after the control word. Setpoint 1 is pre-set to the
transfer of the current output frequency of the frequency inverter (16 bit value).
PZD1 PZD2 PZD3 PZD4
ZSW
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
IW1 IW2 IW3
The actual value is transferred as an integer in the range -32768 to 32767 (8000 hex to 7FFF hex), whereby in
the settings "actual frequency", "actual speed", "current" and "torque current", the values 16384 (4000 hex)
exactly correspond to 100% and -16383 (C000 hex) correspond to exactly -100%. Due to this resolution,
setpoints (depending on function) of up to ± 200% can be transferred.
7.2.1.6 Actual values 2 and 3 (IW2/3)
In addition to actual value 1, two further actual values can be transferred in the words "PZD3" and "PZD4".
PZD1 PZD2 PZD3 PZD4
ZSW
IW1 IW2 IW3
The definition of these two actual values corresponds to that of actual value 1.
If the transfer of a 32 bit actual value is necessary (Example: actual position), this must be divided into two 16
bit values, i.e. into two PZDs (position High and Low words).
The definition in the frequency inverter can then, for example, be made via the parameters:
PZD3: „Bus function - actual value 2" (SK 200E: (P543[02]) or SK 500E (P544)) and
PZD4: „Bus function - actual value 3" (SK 200E: (P543[03]) or SK 500E (P545))
7.2.2 The status machine
The frequency inverter passes through a status machine. The changes between various states are triggered
by the respective control commands in the process data control word. The actual status is returned in the
process data status word.
After switching on, the frequency inverter is in “Switch-on disabled” status. This status can only be ended by
transmitting the “Shut down (Off 1)” command.
The following bits indicate the status of the frequency inverter:
Status Bit 6
Switch-on
disable
Not ready for switch-on 0 X X 0 0 0 0
Switch-on disabled 1 X X 0 0 0 0
Redy for switch-on 0 1 1 0 0 0 1
Activated 0 1 1 0 0 1 1
Operation enabled 0 1 1 0 1 1 1
Fault 0 X X 1 0 0 0
Error active 0 X X 1 1 1 1
Emergency stop active 0 0 1 0 1 1 1
BU 0260 GB Subject to technical amendments 87
Bit 5
Emergency
stop
Bit 4
Disable
voltage
Bit 3
Fault
Bit 2
Operation
enabled
Bit 1
Standby
Bit 0
Ready for
switch-on
Page 88

Supplementary Manual CANopen for NORDAC SK 20E
5
Internal status machi ne
Sw itching on the inverter
Bit2 = 0: Fast stop
1
3456 8
Not on standby
6
Fast stop active
Bit1 = 0: Disable voltage
v Bit2 = 0: Fast stop
2
Sw itch-on
45
Bit0 = 0: Shut dow n
5
5
Bit 3 = 0: Disable operation Bit0 = 1: Sw itch on
3
2
23
disabled
3
Standby
4
Activated
Loading relay applied
Bit0 = 0: Shut dow n
& Bit1 = 1: Enable voltage
& Bit2 = 1: Enable pulses
(xxxx x1xx xxxx x110)
2
From all de vice s tat us e s
7
Error reaction
8
f = 0 reached
(fast stop complete)
Fault
active
Error reaction complete
Fault
Bit3 = 1: Enable operation
&Bit0 = 1:Sw itch on
Control bits
0. Ready for operation / shut dow n
1. Dis able / enable voltage
2. Enable pulses / emergency stop
3. Dis able / enable operation
4. Operation condition / block RUE
5. Enable / stop RUE
6. Enable / disable setpoint
7. Error acknow ledgement (0
10. Control data valid / invalid
11. Rotation right
12. Rotation left
14. Parameter set Bit 0
15. Parameter set Bit 1
Bit3 = 1: Enable operation
5
364
2
1)
Operation enabled
Priority of control comm ands:
1. Dis able voltage
2. Fast stop
3. Shut dow n
4. Enable operation
5. Sw itch on
6. Dis able operation
7. Reset error
Bit4 = 0: Move dow n emergency stop ramp and
remain in 'Operation enabled'
Bit5 = 0: Hold frequenc y
Bit6 = 0: Setpoint = 0%
2
Designation of statuses:
1: Bit 0 = 0
2: Bit 6 = 1
3: Bit 0 = 1
4: Bit 1 = 1
5: Bit 2 = 1
6: Bit 5 = 0
7: Bit 2 & Bit 3 = 1
8: Bit 3 = 1
Bit7 01
Error acknow ledgement
88 Subject to technical amendments BU 0260 GB
Page 89

7 CANopen Data transfer
7.3 Structure of reference data in the standard drive profile (DS402)
The structure of reference data associated with the profile DSP402 is standardised by the CiA users
organisation (see also Section 8.1.4 "CiA (CAN in Automation) recommendations").
7.4 Examples
7.4.1 Configuration examples
The configuration examples described here are intended as supplementary and summary support in addition
to the detailed descriptions in this manual during the configuration of the system bus or field bus (CANopen).
7.4.1.1 "Velocity Mode" from profile DS 402
Via a bus module, 3 frequency inverters are to be independently controlled with a single speed.
given:
Serial No. Device type Designation Motor Other
1
2
3
4
SK 2x5E
frequency inverter
SK 2x5E
frequency inverter
SK 2x5E
frequency inverter
SK TU4-CAO
(with connection unit SK Ti4-TU-Bus)
CANopen technology unit (external)
The bus module and FI 3 should always be the last physical subscribers on the system bus.
NOTE
FI 1 2-pole / n=2890 rpm / 50Hz Ramp time: t=6s
FI 2 4-pole / n=1390 rpm / 50Hz Ramp time: t=4s
FI 3 4-pole / n=1390 rpm / 50Hz Ramp time: t=3s
Bus module
The profile only works in parameter set 1 of the frequency inverter.
BU 0260 GB Subject to technical amendments 89
Page 90

Supplementary Manual CANopen for NORDAC SK 20E
Relevant
bus system
Serial
No.
1 Set up system bus 24V supply of the system bus level necessary
Step Comments
(see Section 2.2.2.2 "Control connections
of the SK
CU4-CAO(-...)")
DIP switch "Bus termination, system bus" on CAO module "ON"
DIP switch "Bus termination, system bus" on FI 3 "ON"
All other DIP switches to "OFF"
Setting of FI addresses preferably via DIP switches (see manual
BU0200):
Bus module: fixed (at 5)
FI 1: to 32
FI 2: to 34
FI 3: to 36
(is preset accordingly)
Make settings on each FI
(P509): { 3 } "System bus"
(P510 [-01 … -02]): { 0 } "Auto"
(P543 [-01]): { 1 } "Actual frequency"
(P546 [-01]): { 1 } "setpoint frequency"
24V supply of the field bus level necessary
(see Section 2.2.3 "Configuration")
If the bus module is the last physical subscriber in the field
bus system:
Set termination resistor:
DIP switch "Bus termination CANopen" to "ON"
Set baud rate
Set node address (identifier)
Make bus module settings:
(P168 [-01]): { 1 } "Profile ON"
(P168 [-02]): { 3000 } „+∆n (FI 1)"
(P168 [-03]): { 6 } „+ ∆t (FI 1)"
(P168 [-04]): { 3000 } „- ∆n (FI 1)"
(P168 [-05]): { 6 } „- ∆t (FI 1)"
(P168 [-06]): { 1500 } „+∆n (FI 2)"
(P168 [-07]): { 4 } „+ ∆t (FI 1)"
…
(P162 [-01,-03,-05,-09]) { 255 }
(P162 [-02,-04,-06,-10]) { 255 }
(P163) { 10 }
(P164) { 250 }
(P165), (P160), (P161) leave at factory setting
(P151): { 200 }
(P120 [-01]) { 1 } or { 2 }
(P166 [-01]): { 250 }
(P166 [-02]): { 400 }
(P167): { 3 }
(P748): "System bus status"
(P740 [-01]): "Control word"
(P740 [-02]): "Setpoint 1"
(P741 [-01]): "Status word"
(P741 [-02]): "Actual value 1"
(P173): "Module status"
(P173): "Module status"
(P176): "PZD Bus In"
(P177): "PZD Bus Out"
System bus
Field bus
(CANopen)
System bus
Field bus
(CANopen)
System bus
Field bus
(CANopen)
2 Set termination resistor
3
4 System bus baud rate set to 250kBaud for FI and bus module
5
6
7
8
9
10
11
Set system bus
addresses
System bus
communication
Configure bus module
for field bus
Field bus
communcation
Monitoring at system
bus level
Monitoring at field bus
level (node monitoring)
Checking system bus
communication
Checking field bus
communication
Note: Settings specific to the application (motor data, control parameters, control terminal functions etc.)
cannot of course be described here.
90 Subject to technical amendments BU 0260 GB
Page 91

7 CANopen Data transfer
7.4.1.2 PZD exchange via PDO telegram according to CANopen DS 301
Via a bus module, 3 frequency inverters are to be independently controlled in positioning operation with a
single speed and a single position.
Given:
Serial
No.
1
2
3
4
Device type Designation Motor Other
SK 2x5E
frequency inverter
SK 2x5E
frequency inverter
SK 2x5E
frequency inverter
SK TU4-CAO
(with connection unit SK Ti4-TU-Bus)
CANopen technology unit (external)
FI 1 4-pole / n=1390 rpm / 50Hz
FI 2 4-pole / n=1390 rpm / 50Hz
FI 3 4-pole / n=1390 rpm / 50Hz
Bus module
Motor with
CANopen absolute
value encoder
(AG1)
Motor with
CANopen absolute
value encoder
(AG2)
Motor with
CANopen absolute
value encoder
(AG3)
The bus module and FI 3 should always be the last physical subscribers on the system bus.
Relevant
bus system
Serial
No.
1 Set up system bus 24V supply of the system bus level necessary
Step Comments
(see Section 2.2.2.2 "Control connections
of the SK
CU4-CAO(-...)")
2 Set termination resistor
3
System bus
4 System bus baud rate set to 250kBaud for FI, AG and bus module
5
Set system bus
addresses
System bus
communication
DIP switch "Bus termination, system bus" on CAO module
"ON"
DIP switch "Bus termination, system bus" on FI 3 "ON"
All other DIP switches to "OFF"
Setting of FI addresses preferably via DIP switches (see manual
BU0200):
Bus module: fixed (at 5)
FI 1: to 32
FI 2: to 34
FI 3: to 36
AG1: to 33
AG2: to 35
AG3: to 37
(preset accordingly for FI and bus module)
Make settings on each FI
(P509): { 3 } "System bus"
(P510 [-01 … -02]): { 0 } "Auto"
(P543 [-01]): { 1 } "Actual frequency"
(P543 [-02]): { 10 } "Actual position in inc. Low-Word"
(P543 [-03]): { 15 } "Actual position in inc. High-Word"
(P546 [-01]): { 1 } "setpoint frequency"
(P546 [-02]): { 23 } "Setpoint position in inc. Low-Word"
(P546 [-03]): { 24 } "Setpoint position in inc. High-Word"
BU 0260 GB Subject to technical amendments 91
Page 92

Supplementary Manual CANopen for NORDAC SK 20E
Relevant
bus system
Field bus
(CANopen)
System bus
Field bus
(CANopen)
System bus
Field bus
(CANopen)
Serial
No.
6
7
8
9
10
11
Step Comments
Configure bus module
for field bus
Field bus
communcation
Monitoring at system
bus level
Monitoring at field bus
level (node monitoring)
Checking system bus
communication
Checking field bus
communication
24V supply of the field bus level necessary
(see Section 2.2.3 "Configuration")
If the bus module is the last physical subscriber in the field
bus system:
Set termination resistor:
DIP switch "Bus termination CANopen" to "ON"
Set baud rate
Set node address (identifier)
Make bus module settings:
(P168 [-01]): { 0 } "Profile OFF"
(P162 [-01,-03,-05,-09]) { 255 }
(P162 [-02,-04,-06,-10]) { 255 }
(P163) { 10 }
(P164) { 250 }
(P165), (P160), (P161) leave at factory setting
(P151): { 200 }
(P120 [-01]) { 1 } or { 2 }
(P166 [-01]): { 250 }
(P166 [-02]): { 400 }
(P167): { 3 }
(P748): "System bus status"
(P740 [-01]): "Control word"
(P740 [-02]): "Setpoint 1"
(P741 [-01]): "Status word"
(P741 [-02]): "Actual value 1"
(P173): "Module status"
(P173): "Module status"
(P176): "PZD Bus In"
(P177): "PZD Bus Out"
Note: Settings specific to the application (motor data, control parameters, control terminal functions etc.)
cannot of course be described here.
92 Subject to technical amendments BU 0260 GB
Page 93

7 CANopen Data transfer
7.4.2 Example telegrams
Various example telegrams are shown below to clarify the control and parameterisation of the frequency
inverter with the various field bus systems.
7.4.2.1 Example for switching the frequency inverter on and off
In this example, a FI will be operated with a setpoint (setpoint frequency) and an actual value (actual
frequency). The "maximum frequency" is 50Hz.
Parameter settings:
P105 = 50
P543 = 1
P546 = 1
Control
word
- - - - - - 0000
- - - - - - xx40
047E
hex
047F
hex
The FI is enabled, the motor is supplied with current and rotates with a frequency of 25Hz.
0047E
The FI is disabled again and the motor is without current.
047F
hex
The FI is enabled, the motor is supplied with current and rotates with a frequency of 12.5Hz.
7.4.2.2 CANopen with USS process data
Setpoint 1 Status
0000
hex
2000
2000
1000
hex
hex
hex
hex
word
xx31
xx37
xx31
xx37
0000
hex
0000
hex
0000
hex
2000
hex
0000
hex
1000
hex
Actual
value 1
hex
hex
hex
hex
hex
hex
Explanation
The mains voltage is switched on at the FI
FI is set to "Standby" status
FI is set to "Operation enabled" status and controlled with a
50% setpoint.
FI is set to "Standby" staus, the motor runs up its
parameterised ramp to speed 0 and is switched off.
FI is set to "Operation enabled" status and controlled with a
25% setpoint.
The following example is designed to clarify control using PDOs. The following settings are assumed:
FI 1 on field bus module SK xU4-CAO
Node-ID "4"
Parameter (P509) "Source control word"
for SK500E: Setting: {6} "CANopen control word" (object number (21FD
for SK200E: Setting: {3} "System bus" (object number (21FD
hex
) = 3,
) = 6) or
hex
(P510)= {0}
Rx-PDO1 is used for control. The device transmits its actual values via Tx-PDO1
The drive profile is disabled
for SK 500E: Setting: (P551) = {0} or
for SK200E: Setting: (P168 [-01]) = {0}
Identifier
Rx-PDO1: 0200
Tx-PDO1: 0180
+ NODE-ID 0204
hex
+ NODE-ID 0184
hex
hex
hex
BU 0260 GB Subject to technical amendments 93
Page 94

Supplementary Manual CANopen for NORDAC SK 20E
Mapping
Byte 1 2 3 4
Rx-PDO1 Obj 0x3000 (Sub 1) (control word) 0bj. 0x3002 Sub1 (Setpoint 1)
Byte 1 2 3 4
Tx-PDO1 Obj 0x3000 (Sub 1) (status word) 0bj. 0x3003 Sub1 (Actual value 1)
NOTE
Objects 3002
and 3003
hex
can be used to specify which setpoint or actual value is to be
hex
transferred. The meaning of the setpoint or actual values is set in the frequency inverter via
parameters (P543) - (P548) for SK 500E and via parameters (P543[-01]-[-03]) or (P546[-01]
- [-03]) for SK 200E.
Control data, profile DS301 with USS State Machine:
In order to be able to control the frequency inverter, the CANopen status must first be set to “Operational”
After switching on, the frequency inverter is in “Switch-on disabled” status. It has to be switched to "Ready for
switch-on" status using a control command. To do so, the control word “0x047E” must be transmitted. The
PDO telegram then has the following structure:
Byte 1 2 3 4
ID=204 7E
04
hex
00
hex
00
hex
hex
The drive should then run at 50% of its maximum frequency. For this purpose, the control words “0x047F” and
“0x2000” must be transmitted as setpoints:
Byte 1 2 3 4
ID=204 7F
04
hex
00
hex
20
hex
hex
94 Subject to technical amendments BU 0260 GB
Page 95

7 CANopen Data transfer
7.4.2.3 Application-specific mapping
Instead of using the default mapping, an application-specific mapping can define which data is to be
transmitted by means of PDOs. For this, the module must be in "Pre-Operational" status or should be put in
this status with the NMT service "Enter Pre-Operational".
The procedure for an application-specific mapping is explained on the basis of a specific example.
Example:
With the aid of a Transmit PDO, the control word and setpoint 3 are to be transferred to the frequency inverter
with a data width of 16 bit.
The CAN identifier 0x432 is to be used for the transfer.
The transfer is to be carried out sychronously with each third SYNC object.
The default CAN-IDs are used for the SDOs.
Changes to the mapping for the Transmit PDO1
Deactivation of Transmit PDO 1
Deactivation of the PDO mapping by setting "0" - Setting of the number of mapping objects in Index 0x1A00,
Sub-Index 0 (Transmit PDO Mapping Parameter).
Transmit 0x0600 0x2F 00 1A 00 00 xx xx xx
Receive 0x0580 0x60 00 1A 00 xx xx xx xx
CAN-ID Data
Entering the mapping objects
Entry in the Transmit PDO mapping structure (Index 0x1A00) of:
Index
Sub-index
Object length of the application object
A maximum of 8 bytes of data can be assigned to each PDO.
Application object Index Sub-index
FI 1 control word 0x3000 1
FI 1 Setpoint 3 0x3002 3
The following structure must be achieved in the mapping parameters of the 1st Transmit PDO (Objekt 0x1A00).
Sub-index Index Sub-index Object length in bits Comments
0 2
1 0x3000 1 0x10
2 0x3002 3 0x10
Number of mappings
FI 1 control word
FI 1 Setpoint 3
NOTE
The number of valid sub-indices are only entered into Sub-Index 0 after the mapping
parameters in Sub-Index 1 ... 8 have been entered.
BU 0260 GB Subject to technical amendments 95
Page 96

Supplementary Manual CANopen for NORDAC SK 20E
These objects are stored with the aid of SDO transfers:
Map object 0x3000
Transmit 0x0600 0x23 00 1A 01 10 01 00 30
CAN-ID Data
Set object 0x1A00 Sub-index 1 to object 0x3000 Sub-index 1 and 16 bit data width
Map object 0x3002
Transmit 0x0600 0x23 00 1A 02 10 03 02 30
CAN-ID Data
Set object 0x1A00 Sub-index 2 to object 0x3002 Sub-index 3 and 16 bit data width
Number of mapping objects = 2, enter into Sub-index 0
Transmit 0x0600 0x2F 00 1A 00 02 xx xx xx
Receive 0x0580 0x60 00 1A 00 xx xx xx xx
CAN-ID Data
Change communication parameters
Deactivation of Transmit PDO 1
In order to change the communication parameters, the Transmit PDO 1 which was prepared in the example
above must be deactivated.
To do this, the value 0x80000000 must be written into the communication object of the Transmit PDO1
(Transmit PDO communication parameter, Index 0x1800, Sub-index 01).
Transmit 0x0600 0x23 00 18 01 00 00 00 80
Receive 0x0580 0x60 00 18 01 xx xx xx xx
CAN-ID Data
Setting the communication parameters for Transmit PDO1
In the object with the index 0x1800, Sub-index 1 to 3 (Transmit PDO communication parameter) the
communication parameters must now be written into the structure.
Here, Transmission Type 3 (synchronous transmission with each 3rd SYNC object) is defined.
TxPDO communication parameter, Index 0x1800
Sub-index Value Significance
0 3 Number of entries
1 0x0432 COB-ID used by PDO
2 3 Transmission type
3 0 Inhibit time
Sub-index 3: Inhibit time = 0
Transmit 0x0600 0x2B 00 18 03 00 00 xx xx
Receive 0x0580 0x60 00 18 03 xx xx xx xx
CAN-ID Data
96 Subject to technical amendments BU 0260 GB
Page 97

7 CANopen Data transfer
Sub-index 2: Transmission Type = 3
Transmit 0x0600 0x2F 00 18 02 03 xx xx xx
Receive 0x0580 0x60 00 18 02 xx xx xx xx
CAN-ID Data
Sub-index 1: Set COB-ID = 432 for the PDO and set the PDO from invalid to valid
Transmit 0x0600 0x23 00 18 01 32 04 00 00
Receive 0x0580 0x60 00 18 01 xx xx xx xx
CAN-ID Data
As soon as the module is set to the status "Operational" with the command "Start Remote Node", the PDOs
become active and the TxPDO object can be used for the transmission of data.
BU 0260 GB Subject to technical amendments 97
Page 98

Supplementary Manual CANopen for NORDAC SK 20E
8 Additional information
8.1 Bus configuration
In an industrial environment the correct installation of the bus system is particularly
important in order to reduce potential interference. The following points are designed to
help prevent interference and problems right from the start. The installation guidelines are
not complete and applicable safety and accident prevention guidelines must be complied
with.
8.1.1 Laying of the CAN/CANopen bus cables
A CAN network consists of a maximum of 128 subscribers (nodes) and is based on a linear topology. The
number of subscribers is dependent on the driver modules (standard approx. 100 nodes). Repeaters must be
used for a high number of nodes.
With NORDAC frequency inverters, a twisted two-wire cable (with connected shield) is used for data transfer.
8.1.2 Cable material
The frequency inverter is usually connected to the CANopen system by a twisted, shielded two-wire cable. .
The guaranteed transfer speeds or transfer distances can only be achieved without errors if the specific cable
parameters are complied with.
The following relationship exists between the individual cable parameters:
Bus cable length Resistance Cable cross-section Possible transfer rates
0 - 25m
25 - 50m
50 - 80m
80m - 230m
230m – 480m
480m – 1km
70 m/m 0.25 mm
70 m/m 0.25 mm
< 60 m/m 0.34 mm
< 40 m/m 0.5 mm
< 26 m/m 0.75 mm
< 20 m/- 1 mm
2
, AWG23
2
, AWG23
2
, AWG23
2
, AWG21
2
, AWG18
2
, AWG…
1 Mbit/s
800 kBits/s
500 kBits/s
250 kBits/s
125 kBits/s
50 kBits/s
The interface is compliant with ISO 11898. The maximum permissible voltage on the CAN_L and CAN_H
cables is -8V … +18V.
NOTE
The lower the shielding resistance of the CANopen cable, the better the EMC quality. The
electromagnetic compatibility (EMC) describes the normally required state, that technical
devices do not interfere with each other due to electrical or electromagnetic effects.
98 Subject to technical amendments BU 0260 GB
Page 99

8 Additional information
8.1.3 Cable layout and shielding (EMC measures)
If EMC measures are not in place, high-frequency interference which is mainly caused by switching processes
or lightning often causes electronic components in the bus subscribers to be faulty and error-free operation can
no longer be ensured.
Appropriate shielding of the bus cable reduces electrical interference which can arise in an industrial
environment.
The best shielding characteristics are achieved with the following measures:
Avoid long connections between bus subscribers
Shield the bus cable on both ends with large-area connection to the plug housing
Avoid spur cables
Avoid extensions to bus cables via plug connectors
Bus lines should be laid with a minimum spacing of 20cm to other lines which carry a voltage higher than 60V.
This applies to lines laid inside and outside of control cabinets.
Special attention should be paid to bending radii:
Fixed cable Freely laid cable Bending radius of cable
Minimum radius
5 x cable diameter
Minimum radius
10 x cable diameter
Correct Incorrect
NOTE
If earthing potential values are different, transient current may flow through shielding which
is connected on both sides. This may be a danger to electronic components. Differences in
potential must be reduced by means of adequate potential equalisation.
8.1.4 CiA (CAN in Automation) recommendations
Important information about CAN and CANopen can be found in Internet under www.can-cia.org and
www.drivecom.org
.
BU 0260 GB Subject to technical amendments 99
Page 100

Supplementary Manual CANopen for NORDAC SK 20E
8.2 Cable glands and shielding connections
Nowadays, field bus systems are a normal part of plant technology. The sensitivity of these systems to
electromagnetic interference (EMC) means that it is essential to protect bus systems from outside interference
by means of uninterrupted or complete screening. Therefore the use of shielded cables and metal screw
couplings or plug connectors has become standard. Assuming correct installation (e.g.: 360° shielding
connection - including on contacts, observance of tightening torques, bending radii, IP- protection classes
(≥IP66),…), the operational reliability of the field bus system can be maximised.
The EMC effect of a cable shield is largely dependent on its contacts to the housing and its earthing on one or
both ends. The shielding effect of a housing must not be influenced by incoming or outgoing screened cables.
It is recommended that the shield is exposed directly at the point of entry and connection of the cable gland
with the reference potential surface and the use of an EMC cable. At the same time this opening in the housing
is "sealed" against the electromagnetic field. The connection from the cable shield to the housing must have a
DC and and inductive resistance which is as low as possible. This depends on the frequency. This low contact
resistance is achieved by the use of a ring-shaped 360° contacting of the cable shielding and short
connections to the housing via the connecting thread.
8.2.1 Fixed connection (cable gland)
Metallic EMC cable glands with a shielding concept should be used to minimise EMC problems.
1 Pressure screw
2 Earthing insert
3 Inner earthing cone
4 Metric fitting
5 O-ring mounted
These special M16 x 1.5 EMC cable glands must be fitted in the relevant connection unit (SK TI4-…(-BUS)) of
the frequency inverter or the CANopen module.
Installation
For the M16 x 1.5 EMC cable gland, 5 mm of the shielding of the cable /conductor is exposed and slightly
spread out. The insulating foil of the Profibus cable must be cut off and must not be folded back.
Sealing ring
connection
thread
Double
nipple
Cone Shileding mesh Pressure screw
Direction of assembly
Function
When the pressure screw is tightened, the sealing insert presses the shielding mesh onto the cone of the
earthing insert. The entire circumference (360°) of the shielding mesh is contacted. The mesh ends in the
cable gland. This produces a large area, low resistance conductive connection between the shield, the
earthing insert and the screw fitting and the housing.
For further information regarding the correct installation of EMC cable glands, please refer to the relevant
manufacturer´s data sheets.
100 Subject to technical amendments BU 0260 GB
Sealing insert Cable
 Loading...
Loading...