

ND-PLAY NDP-090 User Manual [ru]
6+

СОДЕРЖАНИЕ
1. Информация о продукте ......................................................................
2. Вам могут понадобиться ......................................................................
3. Механические детали ..........................................................................
4. Пластиковые детали ............................................................................
5. Сборка манипулятора ..........................................................................
6. Сборка пульта дистанционного управления .........................................
7. Вам могут понадобиться .......................................................................
8. Механические детали ..........................................................................
9. Пластиковые детали ............................................................................
10. Сборка ...............................................................................................
11. Как это работает ................................................................................
12. Возможные неисправности ................................................................
13. Электрическая схема .........................................................................
3
3
4
5
7
29
29
29
30
30
33
35
35
2
Информация о продукте
13Механические детали:3
Робот-манипулятор — тип промышленных роботов. Такие роботы выполняют функции человеческой руки. Соединения сегментов манипулятора допускают вращательные и поступательные движения. Роботы могут распознавать, понимать и менять
окружающую среду. Их сфера деятельности каждый год расширяется. Внедряются
новые программы, роботы могут выполнять всё более точные действия: собирать
автомобили, сортировать мусор, выбирать только спелые плоды при сборе урожая.
В зависимости от специфики, манипуляторы используются в разных отраслях промышленности и выполняют разные задачи. Но все они призваны улучшить условия
труда работников и снизить расходы предприятия. Роботы-манипуляторы — решение для тех сфер, в которых часто случаются ошибки из-за человеческого фактора.
Там, где человеку не хватает скорости реакции или существуют опасные условия,
приходит на помощь робот. Использование роботов-манипуляторов в этой сфере
позволяет выполнять одновременно несколько задач быстро и точно. Их используют для литья, штамповки, сварки, переноса грузов, установки деталей, сборки кузова
и других работ. Роботы-манипуляторы в машиностроении обеспечивают беспрерывное производство. В сфере электроники важна точность, скорость, умение работать с мельчайшими деталями. Рука робота-манипулятора не дрогнет и выполнит
задачу быстрее, чем это сделали бы люди.
Роботы-манипуляторы используются и в других отраслях. Их можно запрограммировать практически на любой ручной труд. Автоматизация производства с помощью
роботов-манипуляторов позволит предприятиям увеличить скорость работы, снизить расходы и повысить рентабельность.
В наборе представлены уникальные аксессуары и запчасти, позволяющие собрать
модель робота-манипулятора. Чистое, безграничное творчество – вот что этот робот
может подарить вашим детям. Робот-манипулятор создан из экологически чистого
сырья. Мы надеемся, что знания, умения и практический опыт, полученные в ходе
сборки этой модели, будут способствовать пониманию теории манипуляторов, которая является разделом теории машин и механизмов.
Следуя инструкции, вы соберете робот-манипулятор с грузоподъемностью до 100 г,
радиусом рабочей зоны до 300 градусов, весом 658 г и размером 30 х 40 см (ШхВ).
Вам могут понадобиться:2
* не входят в комплект
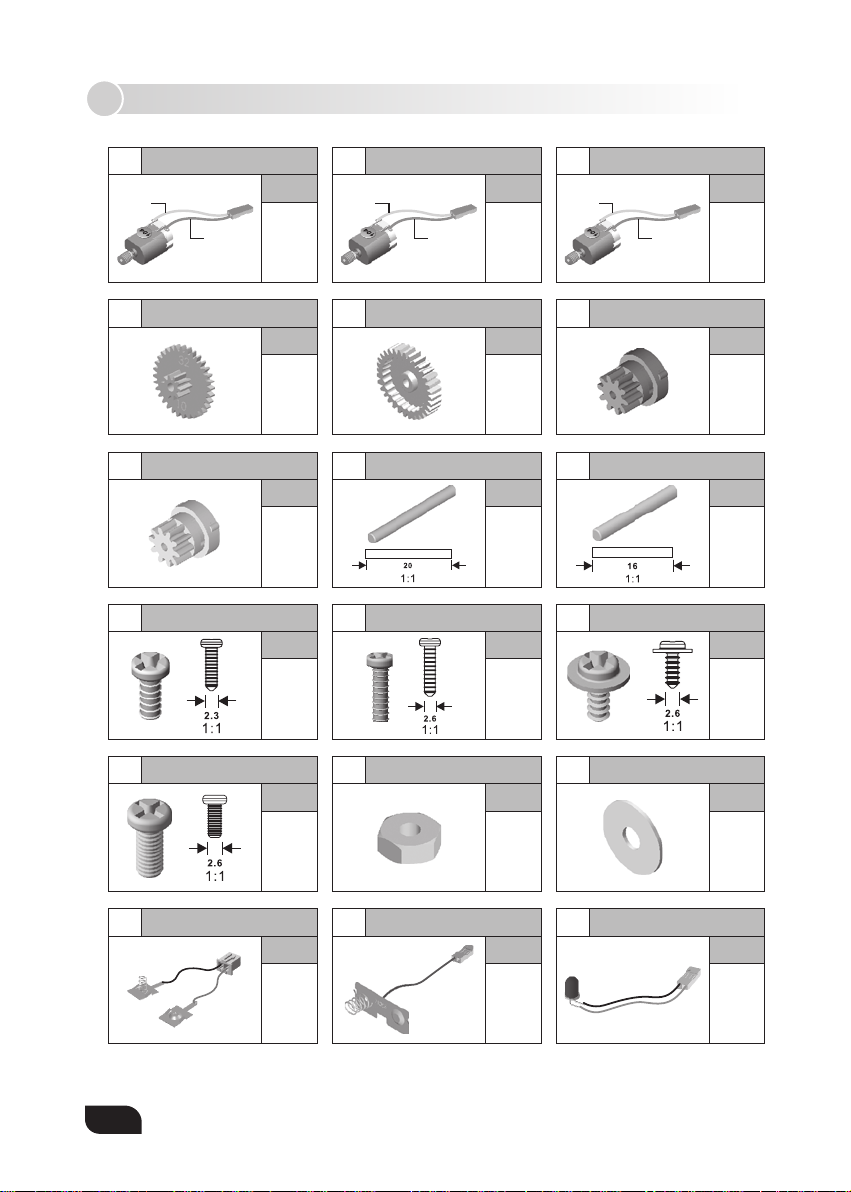
Сервомотор (М4.М5)
Р1
оранжевый
кол-во
Р2
Сервомотор (М2.М3)
голубой
кол-во
Р3
Сервомотор (М1)
желтый
кол-во
черный
Шестеренка 32/10Т (белая)
Р4
Шестеренка 10Т (белая)
Р7
Р10
Р13
Саморез
Винт
2
кол-во
15
кол-во
1
кол-во
16
(2.3х7)
кол-во
черный
Шестеренка 32Т (синяя)
Р5
Р8
Р11
Р14
Ось
Саморез
Гайка
2
кол-во
5
кол-во
9
(2х20)
кол-во
9
(2х20)
кол-во
черный
Шестеренка 10Т (синяя)
Р6
Р9
Р12
Саморез с шайбой
Р15
1
кол-во
4
Ось
кол-во
1
(2х16)
кол-во
1
(2х16)
Шайба
кол-во
Р16
4
(2.6х6)
Контакты батареи
с проводами
кол-во
10
16
Р17
Контакты батареи
с коннектором
Р18
Светодиодная лампа
кол-во
1
1
3
кол-во
1
Р19
Клейкая губка (черная)
кол-во
Р20
Зажим для проводов
кол-во
Р21
A
2
Печатная плата
3
кол-во
1
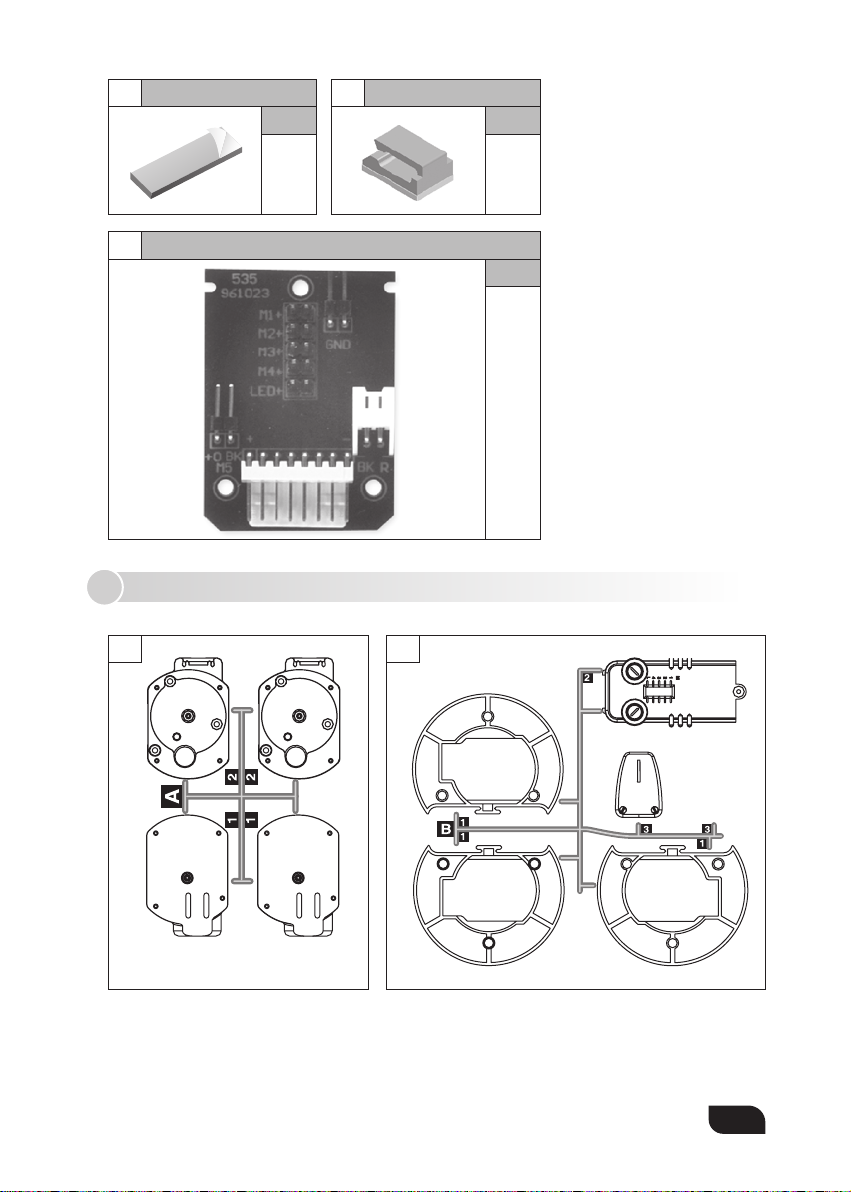
Пластиковые детали:4
B
X2
5
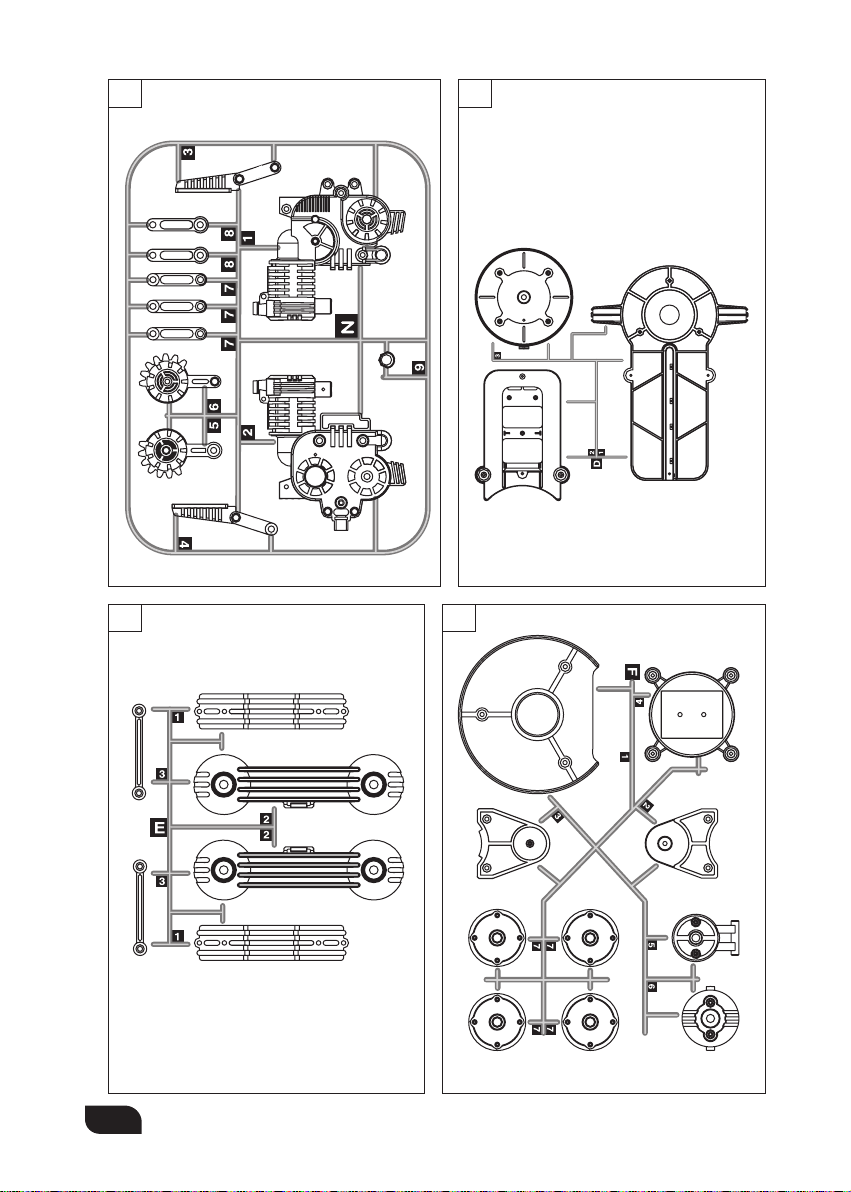
N
D
E
6
F
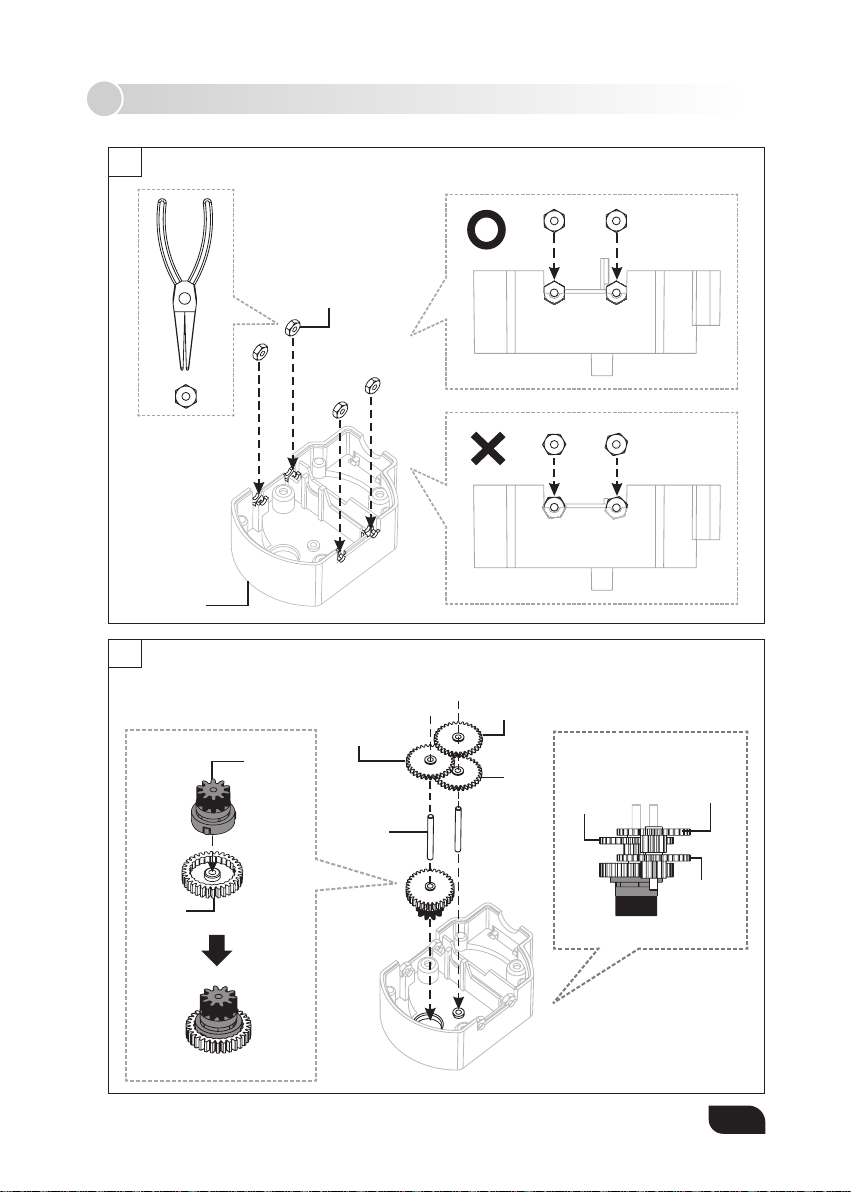
Сборка манипулятора5
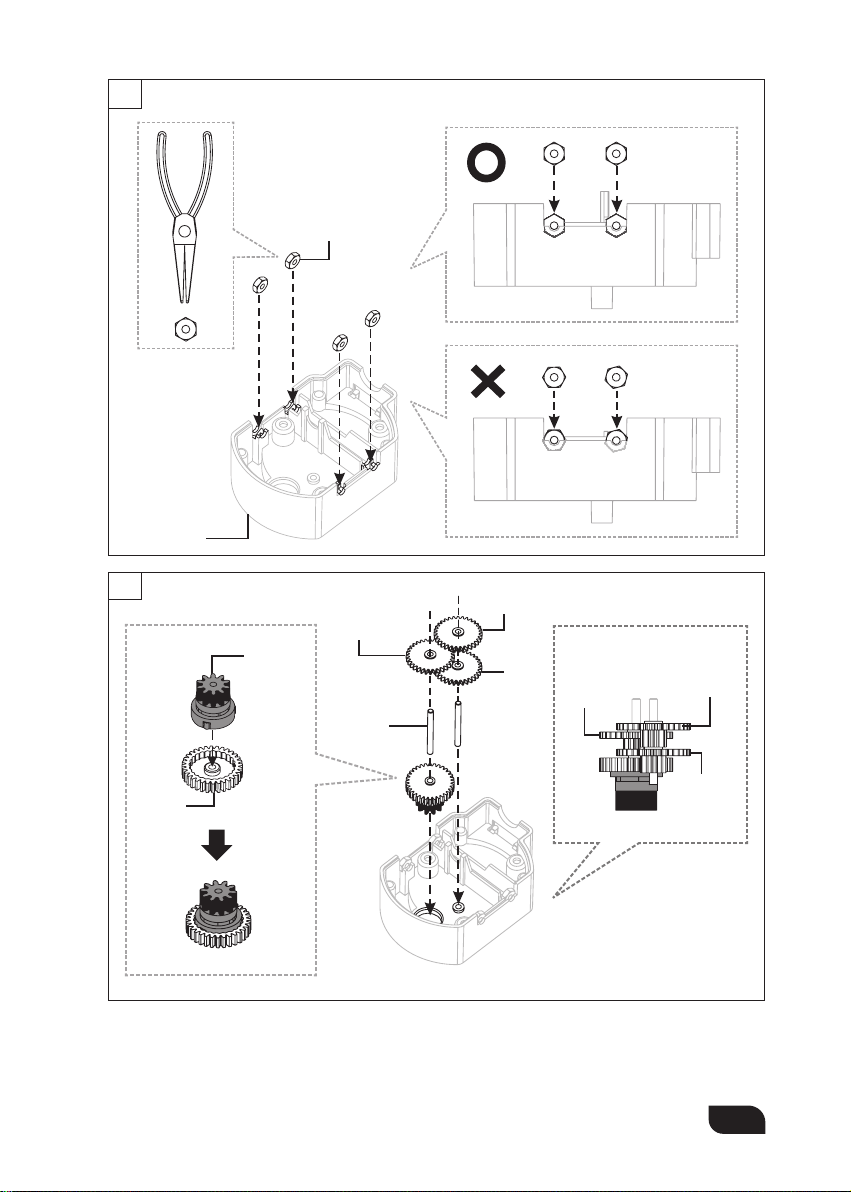
1
Сборка коробки передач для сервомоторов М4.М5
Вставьте гайки (Р14х4)
в пазы детали А2, как
показано на рисунке.
Р14х4
А2
2
Вставьте шестеренку Р6 (синяя)
в шестеренку Р5 (синяя).
Р4
(белая)
Р6
(синяя)
Р8х2
Сборка частей (Р8х2, Р5, Р6, Р4х3),
как показано на рисунке.
Р4 (белая)
Р4
(белая)
Р4
(белая)
Р4
(белая)
Р4
Р5
(белая)
Сборку деталей производить
строго в указанной последовательности.
7
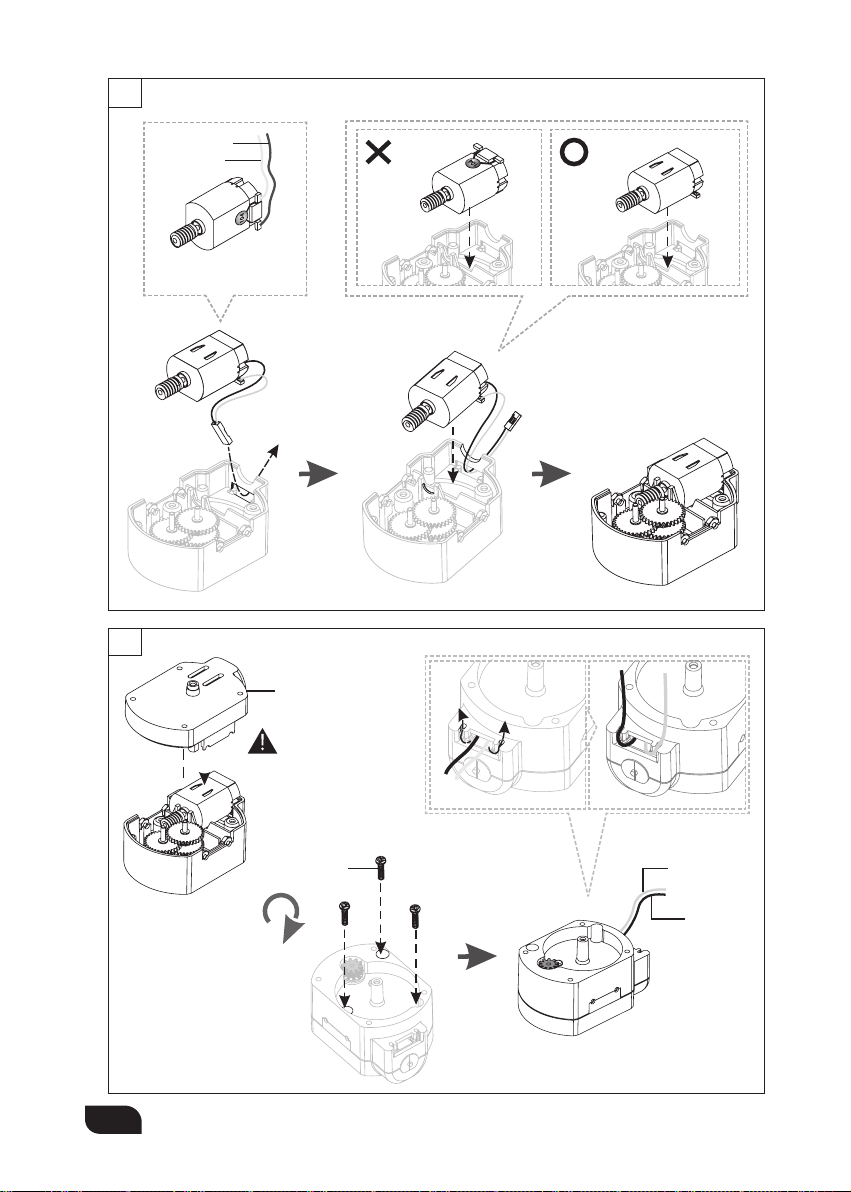
3
4
Черный
Оранжевый
Р1х2
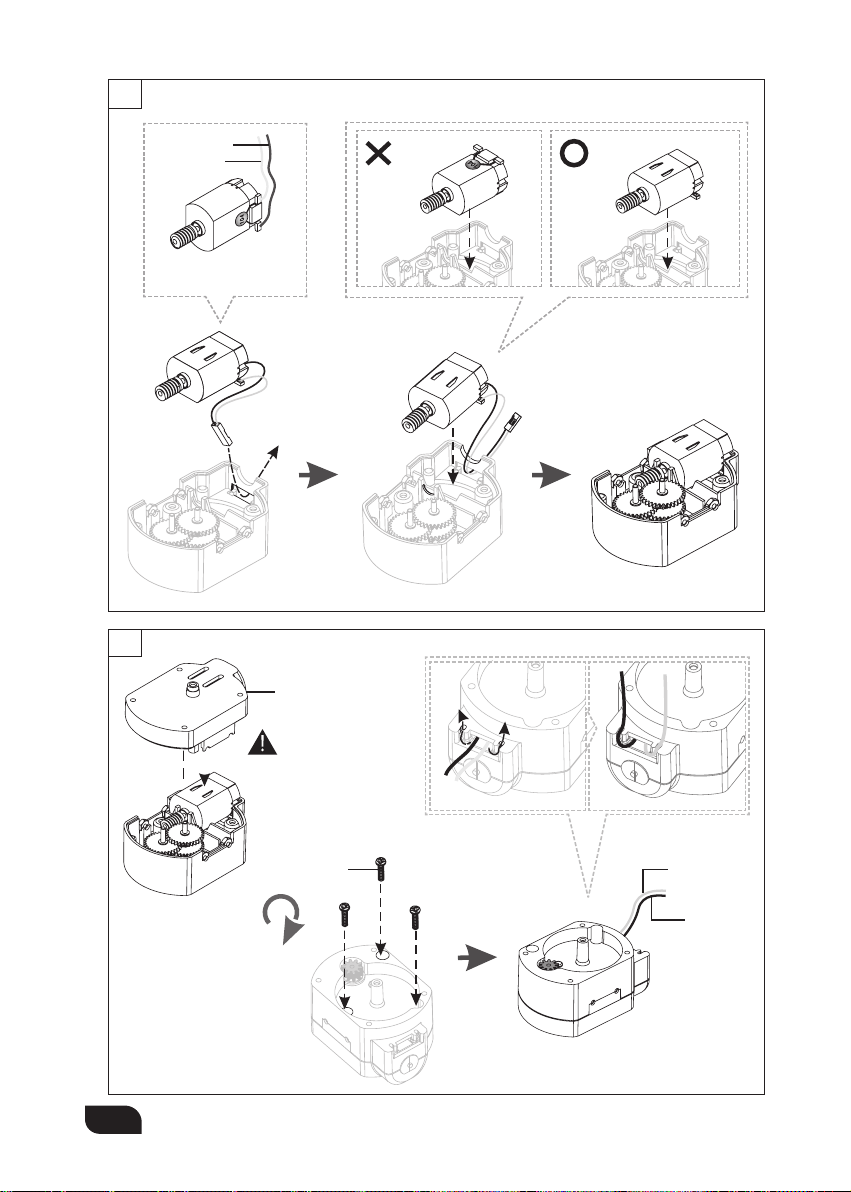
Пропустите провода сервомотора Р1 в отверстие.
Установите сервомотор Р1 в паз
детали А2 клеммами вниз. Отрегулируйте вручную положение
ведущей шестерни на валу двигателя для полного зацепления
с ведомой шестеренкой.
Закрепите деталь
А1 саморезами
Р11х3.
8
А1
Внимание! Гайки
могут выпасть. Будьте
осторожны, прикрепляя деталь А1.
Р11х3
Зафиксируйте
провода, как показано на рисунке.
Соберите второй набор,
повторив шаги 1-4.
Оранжевый
Черный
X2
(М4-М5)
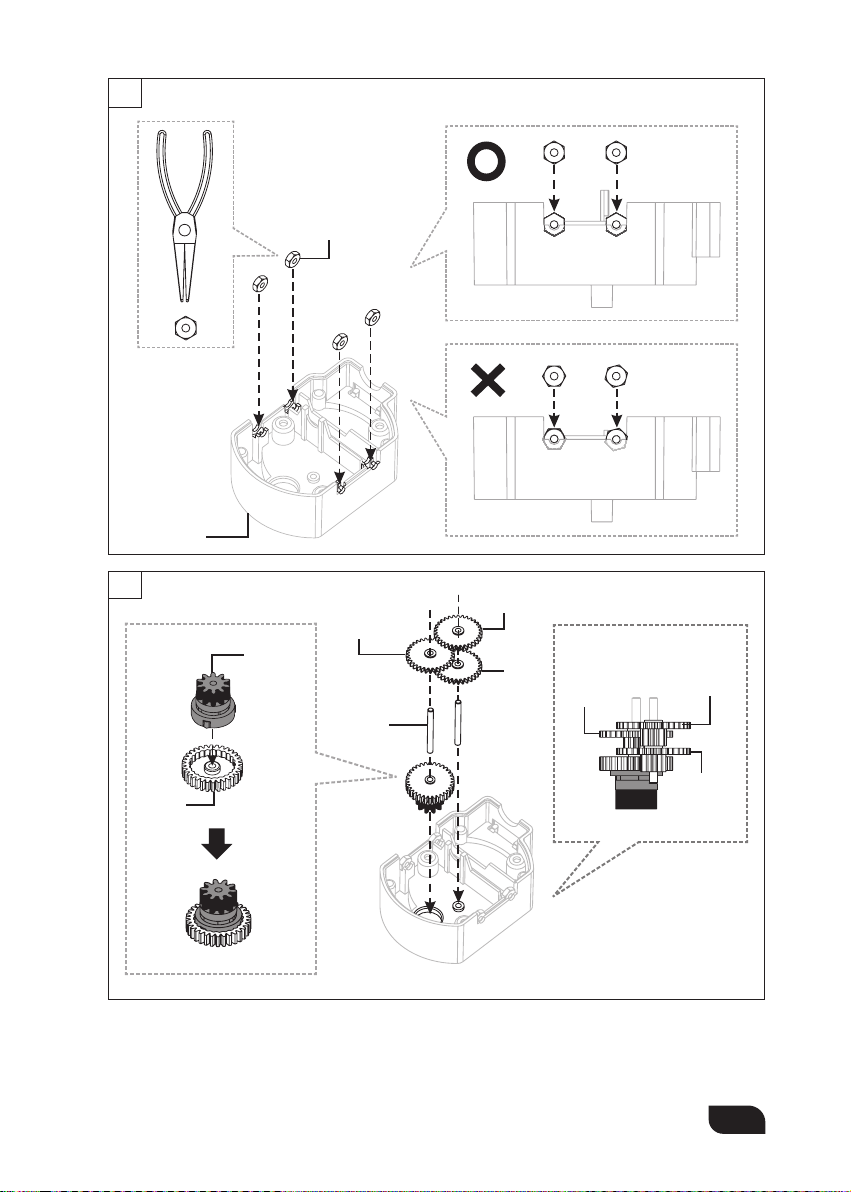
5
Сборка коробки передач для сервомотора М3
Повторите шаги
сборки 1-2
Р14х4
А2
О – верно, Х – неверно
6
Р4
(белая)
Р6
(синяя)
Р8х2
Р5
(синяя)
Р4 (белая)
Р4
(белая)
Р4
(белая)
Р4
(белая)
Р4
(белая)
9
7
Черный
Синий
Р1х2
Пропустите провода сервомотора Р2 в отверстие.
Установите сервомотор Р2
в паз детали А2 клеммами вниз.
8
Закрепите деталь
А1 саморезами
Р11х3.
10
А1
Внимание! Гайки
могут выпасть. Будьте
осторожны, прикрепляя деталь А1.
Р11х3
Синий
Черный
X1
(М3)
9
Сборка коробки передач для сервомотора М2
Повторите шаги
сборки 1-2
Р14х4
А2
10
Р5
(синяя)
Р7
(белая)
Р4
(белая)
Р8х2
Р4 (белая)
Р4
(белая)
Р4
(белая)
Р4
(белая)
Р4
(белая)
11
 Loading...
Loading...