

Nct NCT104, NCT101 INSTALLATION MANUAL

®
NCT
101, 104 Machine Tool Controls
Installation Manual
from Software Version x.061e (M) (L)
Produced and developed by NCT Automation kft.
H1148 Budapest Fogarasi út 7
: P. O. Box: 1631 Bp. pf.26
F Phone: (+36 1) 467 63 00
F Fax:(+36 1) 363 6605
E-mail: nct@nct.hu
Home Page: www.nct.hu
Contents
1 NCT101 Compact Control .................................................8
1.1 Front Panel and Mounting Dimensions of Compact Version (NCT101) ...........9
1.2 Connectors of Compact Version (NCT101) ................................11
1.3 NCT101 Motherboard .................................................12
1.3.1 Power Supply of NCT101 ..........................................13
1.3.2 Measuring System Built on NCT101 Motherboard .......................13
1.3.3 Interface Built on NCT101 Motherboard ...............................15
1.4 Optional NCT101 FEW Board .......................................... 16
2 NCT104 Control with External Operator’s Panel .............................17
2.1 External Operator’s Panel .............................................. 18
2.1.1 Structure and Mounting Dimensions of Monitor Unit ..................... 20
2.1.2 Structure and Mounting Dimensions of Data Input Keyboard ...............21
2.1.3 Structure and Mounting Dimensions of Machine Control Panel .............23
2.2 Structure and Mounting Dimensions of NCT104 Control Unit .................25
2.3 CPU104 board .......................................................26
2.4 XMU Measuring System Boards ......................................... 27
2.4.1 XMU2000 Analog Measuring System Board ........................... 30
2.4.2 XMU CAN Digital Measuring System Board ...........................31
2.5 INT Interface Boards ..................................................32
2.5.1 INT2000 Interface Board ...........................................32
2.5.2 INT100 Interface Board ............................................33
2.6 FEW Boards (PC Integrated in Control) ................................... 35
2.6.1 FEW HDD Board ................................................. 35
2.6.2 FEW CF Board ...................................................37
2.7 NCT104 Power Supply ................................................39
2.7.1 PS100 Power Supply Unit .......................................... 39
3 Elements of Machine Control Panel ........................................41
3.1 Standard Elements of Machine Control Panel ...............................42
3.2 Optional Buttons of Machine Control Panel ................................ 44
4 Options ................................................................ 47
4.1 iPS Power Supply (Option) ............................................. 47
4.2 Handwheel Mounted on Front Panel (Option) ..............................47
4.3 External Handwheel (Option) ...........................................48
4.4 Serial Port Connector Box (Option) ......................................49
4.5 NCT Probe Adapter Unit (Option) .......................................49
4.6 EXEI or EXEV Board for Receiving Sinusoidal Encoder Outputs (Option) ....... 49
4.7 TACHO Board for Generating Tacho Output Signal (Option) .................. 50
4.8 IOMOD Unit Snapped on the 35mm Rail (Option) ..........................51
4.9 ADBRD A to D Converter Board Mounted on INT100 Board (Option) .......... 52
5 Connecting Controls ..................................................... 53
5.1 Power Supply of Controls .............................................. 53
5.2 Power Supply of Interface and Turn-on Process of the Machine ................ 54
3
5.3 Wiring V1, V2, Video In, Monitor Output and Input Connectors ............... 56
5.4 Wiring Connector S1 of Serial Channel RS-232C ........................... 57
5.5 Wiring Connector P1 of Probe Inputs ..................................... 58
5.5.1 Configuring Probe Inputs .......................................... 58
5.5.2 Wiring NCT Probe Interface Board ................................... 60
5.6 NCT CAN Bus and Its Connectors ....................................... 64
5.6.1 Wiring Connectors N2 and CON_CAN ............................... 65
5.6.2 Wiring Connector N1 of NCT101 .................................... 66
5.6.3 Wiring Connectors C1, C2 of XMU CAN Board ........................ 66
5.7 Wiring Connectors E1, ..., E4 of Encoders ................................. 66
5.7.1 Receiving Sinusoidal Encoder Outputs with EXEI or EXEV Board ......... 67
5.8 Wiring Connector A1 of Analog Outputs .................................. 68
5.8.1 TACHO Option Board for Generating Tacho Output ..................... 68
5.9 Wiring Connector O1 of Interface Outputs ................................. 70
5.10 Wiring Connectors I1, I2 of Interface Inputs ............................... 71
5.11 Wiring Integrated Handwheel Connector H1 .............................. 72
5.12 Connecting External Handwheel ........................................ 72
6 Installation and Service Functions of Control ................................ 74
6.1 Power-on Process .................................................... 74
6.1.1 First Phase of the Turn-on Process and its Error Messages ................. 74
6.1.2 Deleting the Waiting of Turn-on Process .............................. 75
6.1.3 Parameter Storing. Message PARAMS – BAD. ......................... 75
6.1.4 Second Phase of the Turn-on Process and its Error Messages .............. 75
6.1.5 Changing the Softkey Number and Screen Color ........................ 76
6.2 Functions of SERVICE UTILITIES ...................................... 78
6.2.1 Activating SERVICE UTILITIES Mode ............................... 78
6.2.2 Functions of SERVICE UTILITIES .................................. 78
6.3 Service Functions during Regular Control Functioning ....................... 80
6.3.1 Parameters ..................................................... 81
6.3.2 PLC ........................................................... 83
6.3.3 I/O Test ........................................................ 84
6.3.4 Logic Analyser ................................................... 86
6.3.5 Measuring System Test ............................................ 89
6.3.6 Oscilloscope .................................................... 90
6.3.7 Version ........................................................ 92
6.3.8 Deleting Memory of Part Programs with Formatting ..................... 93
6.3.9 Replacing System Software ......................................... 93
6.4 Security Functions .................................................... 95
6.4.1 Data Security .................................................... 95
6.4.2 Dealer Security .................................................. 97
6.4.3 Decoder program ................................................. 97
6.4.4 Enable of Data Security Opening with PLC Key ........................ 98
7 Control Installation ...................................................... 99
7.1 The First Steps ....................................................... 99
7.2 Set-up Procedure of Position Control Loop ............................... 100
7.2.1 Setting Servo Loop .............................................. 100
7.2.2 Setting Deceleration at Corners ..................................... 104
4
7.2.3 Limiting Accelerations in Normal Direction Along the Path in Case of Circle Arches
................................................................107
7.2.4 Setting High-speed High-Precision Path Tracking ...................... 107
7.2.5 Setting Gantry Axes .............................................. 112
7.3 Set-up Procedure of Reference Point Return ...............................114
7.3.1 Machine Type Reference Point Return ............................... 115
7.3.2 Floating Reference point return ..................................... 117
7.3.3 Grid Reference point return ........................................ 117
7.3.4 Distance Coded Reference point return ...............................118
7.4 Set-up Procedure of Stroke Limits ....................................... 120
7.4.1 Setting of Stroke Limits with Switches ............................... 120
7.4.2 Setting of Software Stroke Limits ................................... 120
7.5 Compensating Mechanical Errors of Machine ............................. 122
7.5.1 Compensating Backlash Error ...................................... 122
7.5.2 Setting Pitch Error Compensation ...................................122
7.5.3 Task and Setting of Backlash Acceleration Function .................... 127
7.5.4 Static Friction Compensation .......................................128
7.6 Procedure of Spindle Parameter Setting ..................................129
7.6.1 Setting Spindle .................................................. 129
7.6.2 Setting Rigid Tapping (G84.2, G84.3) ................................130
7.6.3 Handling Two Spindles ........................................... 131
7.6.4 Synchronizing Two Spindles .......................................132
7.6.5 Setting Polygonal Turning .........................................133
7.7 Change Positions .................................................... 134
7.7.1 Setting Change Positions ..........................................134
7.7.2 Travel to Change Position ......................................... 134
7.8 Problems with Rotary Table Operation ...................................136
7.8.1 Operating rotary table in angle range 0° – +359.999° .................... 136
7.8.2 Operating rotary axis can be positioned to discrete values ................ 136
7.9 Set-up Procedure of Probe on Milling Machine ............................138
7.10 Set-up Procedure of Tool Offset Sensor on Lathe ..........................139
7.11 Calibrating Tool Sensor on Lathe ......................................140
7.11.1 Calibrating Tool Sensor to Chuck Coordinate System. .................. 141
7.11.2 Calibrating Tool Sensor to Reference point ...........................142
7.12 Other Settings .....................................................143
7.12.1 Operating PLC Constants ......................................... 143
7.12.2 Setting Tool Change Parameters ...................................143
7.12.3 Parametering Free-purpose Analog Outputs ..........................143
7.12.4 Setting Path Dependent Lubrication ................................ 143
7.12.5 Function Transfer at Addresses A, B, C .............................143
7.12.6 Screen Settings .................................................144
7.12.7 Parameters Influencing Axis Movements ............................144
7.12.8 Settings of Initializing after Power-on and Reset ....................... 145
7.12.9 Different Parameters Influencing Part Programming ....................145
8 Parameters ............................................................ 146
8.1 Introduction ........................................................146
8.1.1 Valid Data Ranges of Parameters ...................................147
8.1.2 Reference to Coordinate Data ......................................147
5
8.1.3 Reference to Feedrate and Acceleration Data .......................... 148
8.2 IPLCONST Parameter Group .......................................... 150
8.3 DISPLAY Parameter Group ........................................... 158
8.4 COMMON Parameter Group .......................................... 163
8.5 SERIAL Parameter Group ............................................. 181
8.6 FEED/ACC Parameter Group .......................................... 183
8.7 AX.LIMIT Parameter Group ........................................... 193
8.8 SERVO Parameter Group ............................................. 196
8.9 SPINDLE Parameter Group ........................................... 211
8.10 STRAIGHTNESS Parameter Group .................................... 224
8.11 PTCHCMP Parameter Group ......................................... 226
8.12 REFPAR Parameter Group ........................................... 230
8.13 MEASURE Parameter Group ......................................... 238
8.14 MACRO Parameter Group ........................................... 241
Alphabetical Index ....................................................... 250
July 27, 2007
6

© Copyright NCT
The Publisher reserves all rights for the
contents of this Manual. No reprinting, even
in extracts, is permissible unless our written
consent is obtained. The text of this Manual
has been compiled and checked with utmost
care, y et we a ssume no liability for possible
errors or spurious data and for consequential
losses or damages. In case the manual does
not give a definite answer, please contact
our experts so we can help you.
7
1 NCT101 Compact Control
1 NCT101 Compact Control
In the compact version (NCT101) the monitor, the alphanumeric keyboard and the machine
control panel are mounted on a front panel. The control unit is placed behind them, it is integrated
with the front panel, and cannot be separated from it
Basic configuration of NCT101 compact version:
Operator’s panel (mounted on front panel):
– Monitor: 10" color TFT,
– Alphanumeric keyboard: 51 buttons,
– Number of softkeys: 10,
– Number of menu selection keys: 6,
– Machine control panel: full.
Control unit (mounted behind the operator’s panel):
– Serial port: 1,
– Monitor output: VGA-compatible,
– Probe input: max. 4,
– Number of encoder inputs (with spindle): max. 4 (non-extendable),
– Number of analog outputs (with spindle): max. 4 (non-extendable),
– CAN bus: connectors for external handwheel and 4 NCT digital drives,
– Number of interface inputs: max. 48 (non-extendable),
– Number of interface outputs: max. 32 (non-extendable).
Options of NCT101 compact version:
– Handwheel:
integrated: on front panel,
external: in separate box, with axis and increment selector switches, as well as with
emergency stop, it is connected to operator’s panel with spiral cable,
for each axis: it is possible to mount separate handwheels on axes X and Z in case of
turning controls, while on axes X, Y and Z in case of milling controls. The
moving of further axes is possible with a further mutual handwheel.
– TACHO board: generates analog tacho signal output for all 4 axes,
– WindowsXP Embedded FEW board: PC with CF board mass storage, integrated in the
control.
8
1 NCT101 Compact Control
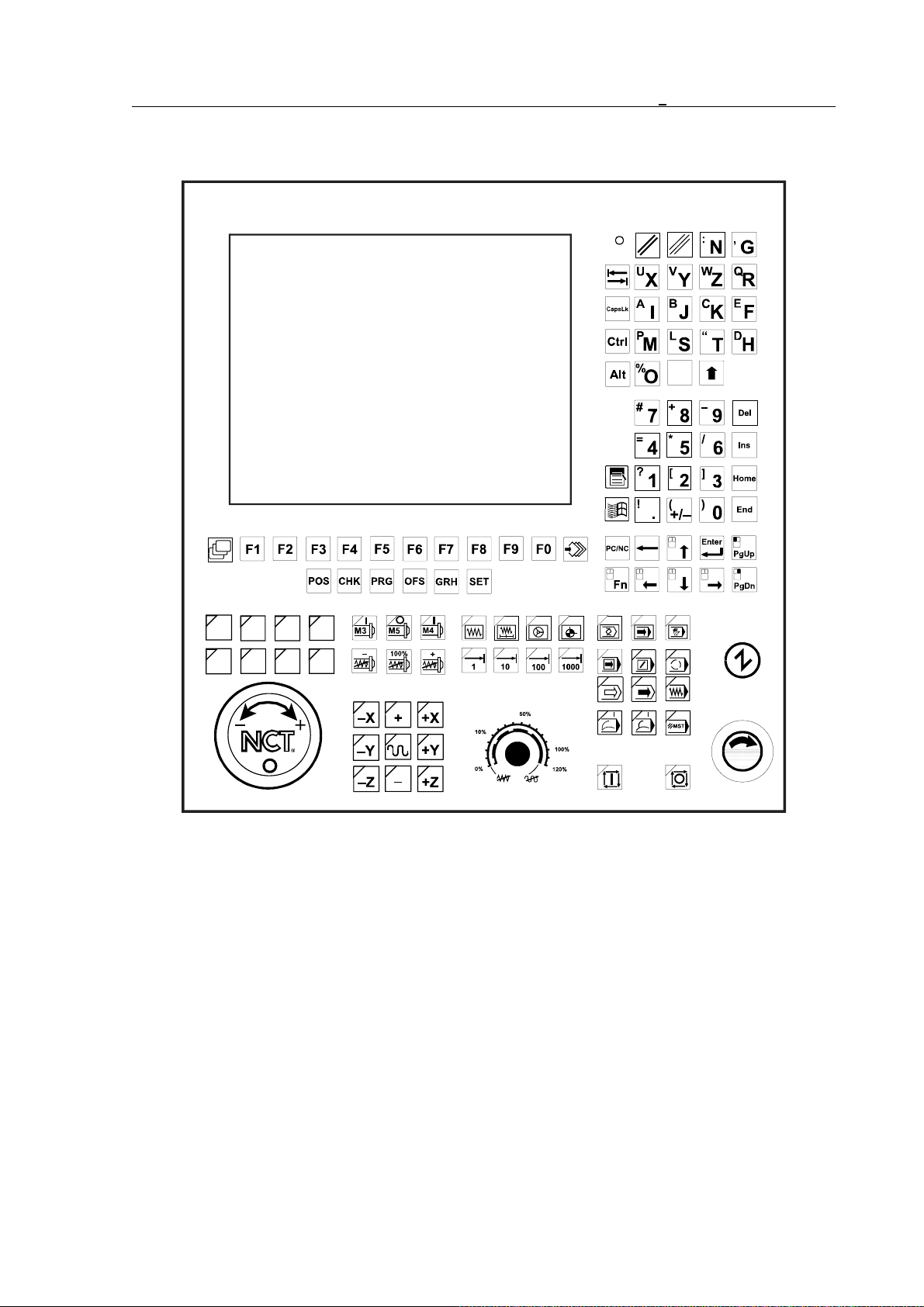
1.1 Front Panel and Mounting Dimensions of Compact Version (NCT101)
Front panel of compact version
9
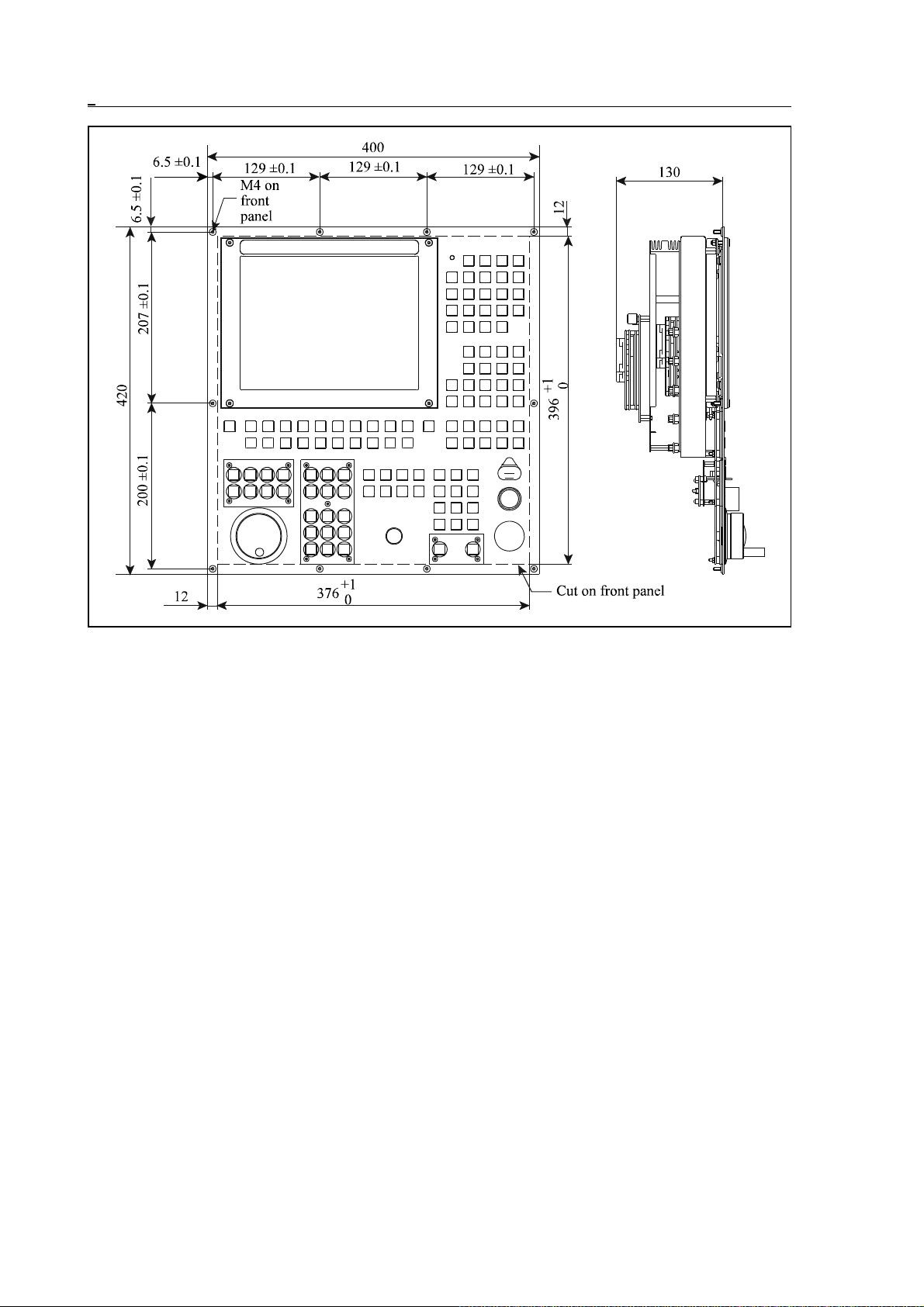
1 NCT101 Compact Control
Mounting dimensions o f compact version
10
1.2 Connectors of Compact Version (NCT101)
1 NCT101 Compact Control
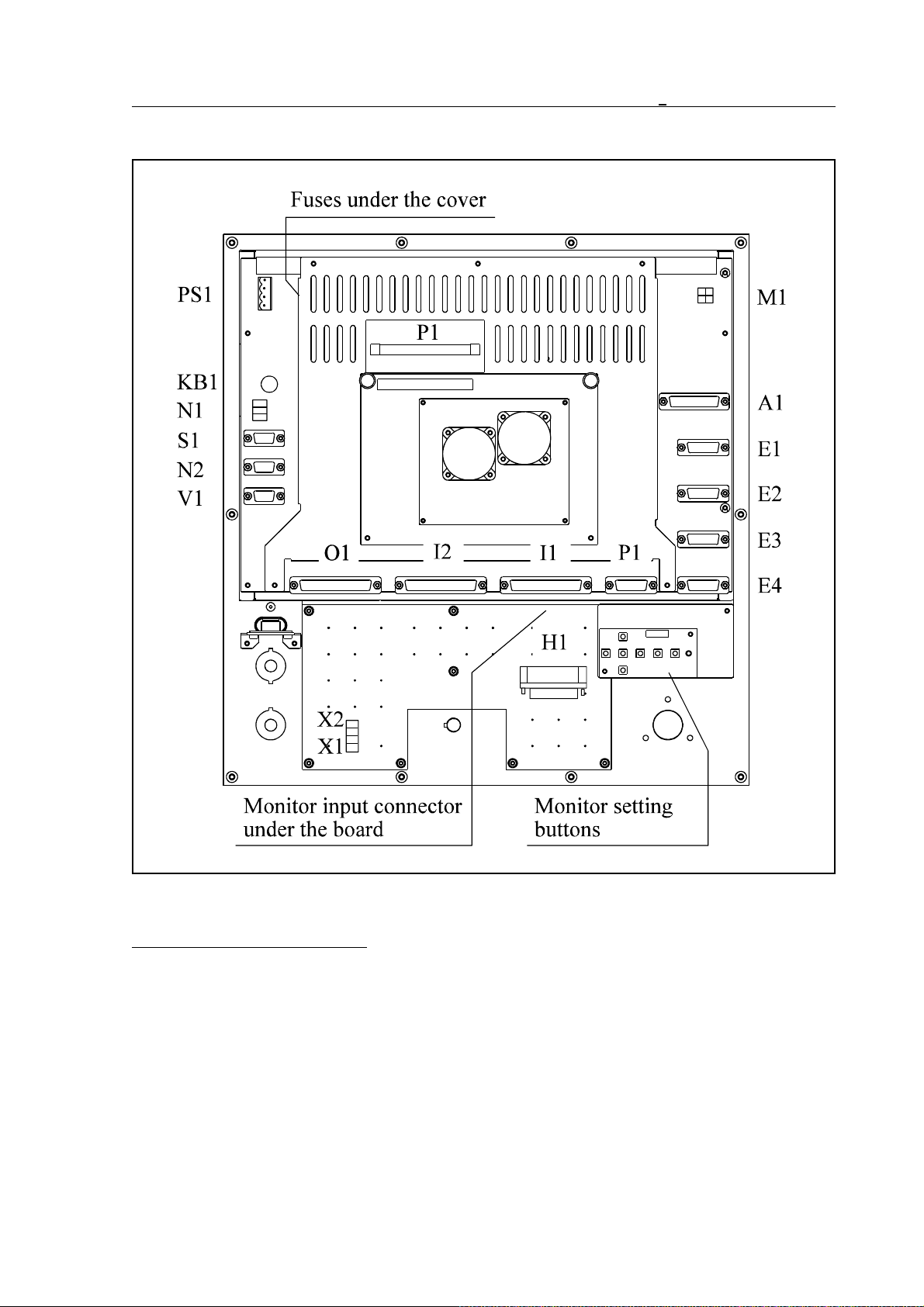
Rear view of compact version
Connectors of compact control:
– PS1: Power supply input connector.
– KB1: PS/2-compatible keyboard connec tor. It can only be used for motherboa rd BIOS setting.
– N1: CAN bus connector for NCT digital drives.
– S1: RS-232C serial port connector.
– N2: CAN bus connector for external handwheel.
– V1: Video output (VGA-compatible).
– M1: It is exclusively used in course of software installation for FEW board, it supplies power
for CD ROM drive.
– P1: connector of optional FEW unit (integrated PC).
– A1: Connector of analog outputs to drives.
11
1 NCT101 Compact Control
– E1, ..., E4: connectors of encoder signals.
– O1: connector of interface outputs.
– I1, I2: connector of interface inputs.
– P1: Connector of probe inputs.
– H1: Connector of integrated handwheel. It is exclusively suitable for receiving signals of hand-
wheels with a resolution of 25 pulse/revolution.
– X1: Wiring strip for receiving signals of first contact of emergency stop on external handwheel
Only 24VDC signals can be connected here!
– X2: Wiring strip for receiving signals of second contact of emerge ncy stop on external hand-
wheel Only 24VDC signals can be connected here!
1.3 NCT101 Motherboard
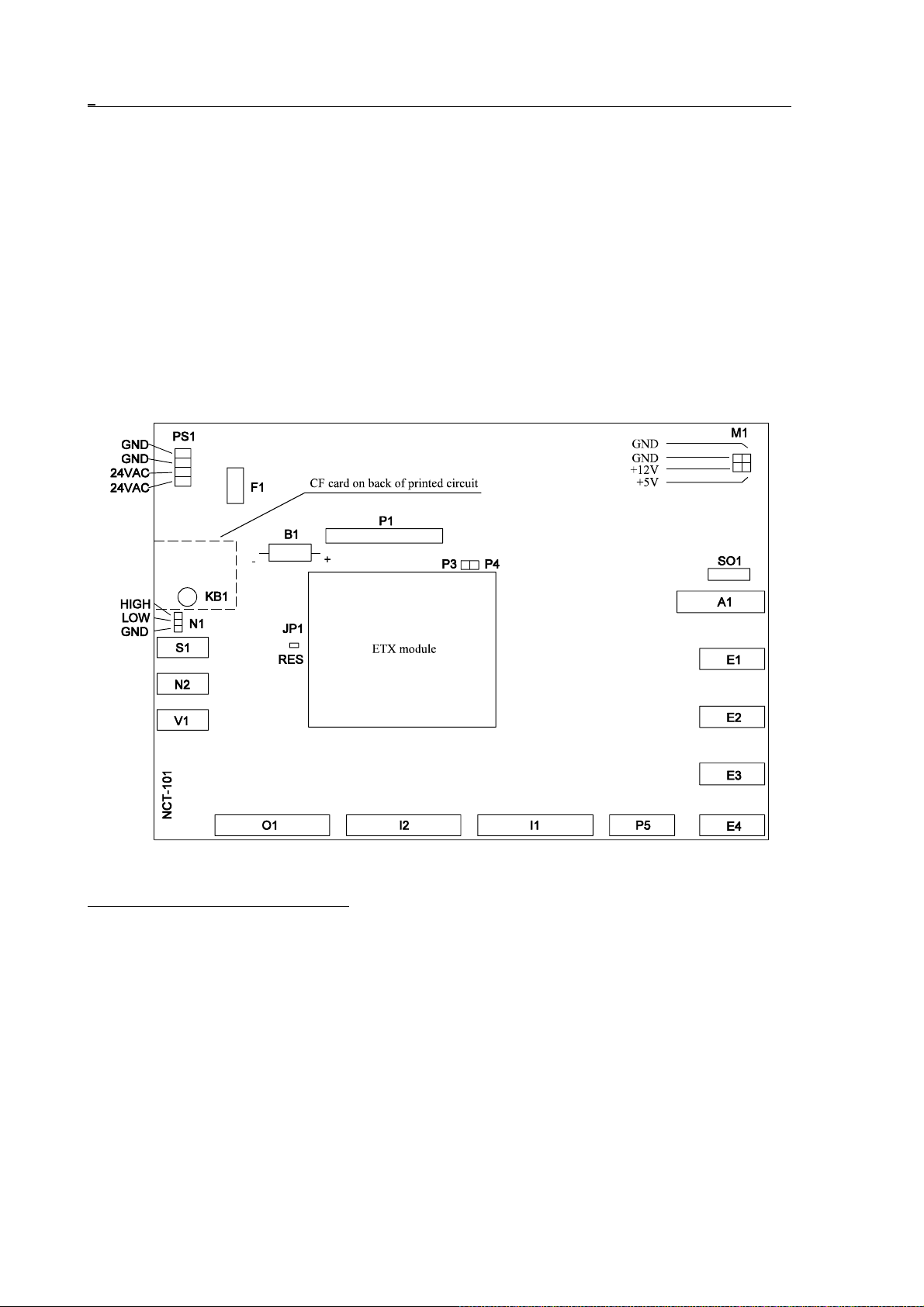
NCT101 motherboard
Captions of NCT101 motherboard:
For captions of external connectors see previous page.
– F1: 6,3A fuse,
– B1: Lithium battery for real time clock (RTC),
– P1: Ribbon cable connector for optional FEW unit,
– P3, P4: Connector for power supply of ETX module ventilators,
– M1: Service connector (HDD, CD power supply) for installing FEW option,
– SO1: Optional TACHO board connector.
ETX module: NCT 101 controls may be delivered with different ETX module types. Therefore
the software version of NCT101 controls (101, 102) may differ according to t he hardware.
CF (Compact Flash) card: CF card stores
– Boot program,
12
1 NCT101 Compact Control
– System software,
– Part programs.
The power supply, CPU, measuring sy stem and interface of the control is mounted on NCT101
motherboard.
1.3.1 Power Supply of NCT101
The power supply of control is on the motherboard. The control needs 24 VAC voltage, which
can be connected through PS1 connector. It can also be fed from 24 VDC voltage. The current
consumption of control is
2A (measured on 24 VAC).
1.3.2 Measuring System Built on NCT101 Motherboard
Structure of measuring system
The measuring system is designed for receiving input signals of 4 encoders and transmitting 4
analog or digital command signals for drives.
Encoder signal inputs are only capable of receiving TTL-level encoder signals.
4 analog outputs are designed, which send the speed command signal of the drive. Optionally
TACHO board can also be mounted to the board, which generates tacho signal from
encoder pulses for drives. This can only be used if the rotating encoder is mounted on the
motor axis, it cannot be used in case of linear scales.
N1 CAN bus connector on the board enables digital serving of 4 drives.
Measuring system outputs and inputs can be used for position controlled or measured axes, as
well as for spindles or for transmitting analog outputs.
Position controlled axes may be:
– NC axes. NC axes are those which can be reached at addresses defined in part program (X, Y,
...C). The logic axis (reference with letters: X, Y, Z, ...), to which a physical axis
(reference with numbers: 1, 2, ...4) is to be ordered, must be selected in course of parameter setting in AXIS parameter group. The physical axis selection determines the
number of the encoder input, from which e.g. axis X receives the encoder pulses needed
for position feedback, as well as the pin number of analog output connector from which
the analog command signal is transmitted for drive X.
– PLC axes. Reference cannot be made directly for PLC axes from part program. They receive
movement command through PLC program in course of function execution. PLC signals
the fact, that the given axis receives its control from it, by setting flags Y630, ..., Y633 to
1. The flags must always be handled according to physical axis number.
Spindles may need encoder inputs and command signal outputs.
Free purpose analog (or digital) outputs can also be used.
Encoder inputs can be used as:
For position feedback of position-controlled axes. Parameter NOLOOPn No. 446n must be set
to 0. In this case the control sends analog speed command signal through the appropriate
analog output (if value of parameter DIGITALn No. 486n is 0 ) to the drive, if the value
of parameter DIGITALn No. 486n is 1 it sends digital command signal through CAN bus
after processing encoder data.
Position measure inputs of non-position-controlled axes. Parameter NOLOOPn No. 446n must
be set to 1. In this case the encoder signals are only used for path measure and position
13
1 NCT101 Compact Control
display, there is no command signal output through analog (or digital) output belong ing
to encoder input.
Receiving signals of spindle encoders. Parameter IOSELS1 No. 5025 determines, which encoder
input is used for spindle.
Analog (or digital) outputs can be used as:
Speed command signal output of position controlled axes. Parameter NOLOOPn No. 446n must
be set to 0. In this case the control calculates speed command signal from signals of
encoder input belonging to analog (or digital) output, and sends command signal to the
drive
Spindle command signal output. The output determined by parameter IOSELS1 No. 5025 is used
for spindle speed command signal output.
Free purpose analog (or digital) output. Outputs determined by parameter COMMANDn No.
010n, which can be programmed through PLC registers, can be used optionally.
Tacho output (speed feedback). In case of motherboard mounted with optional tacho board.
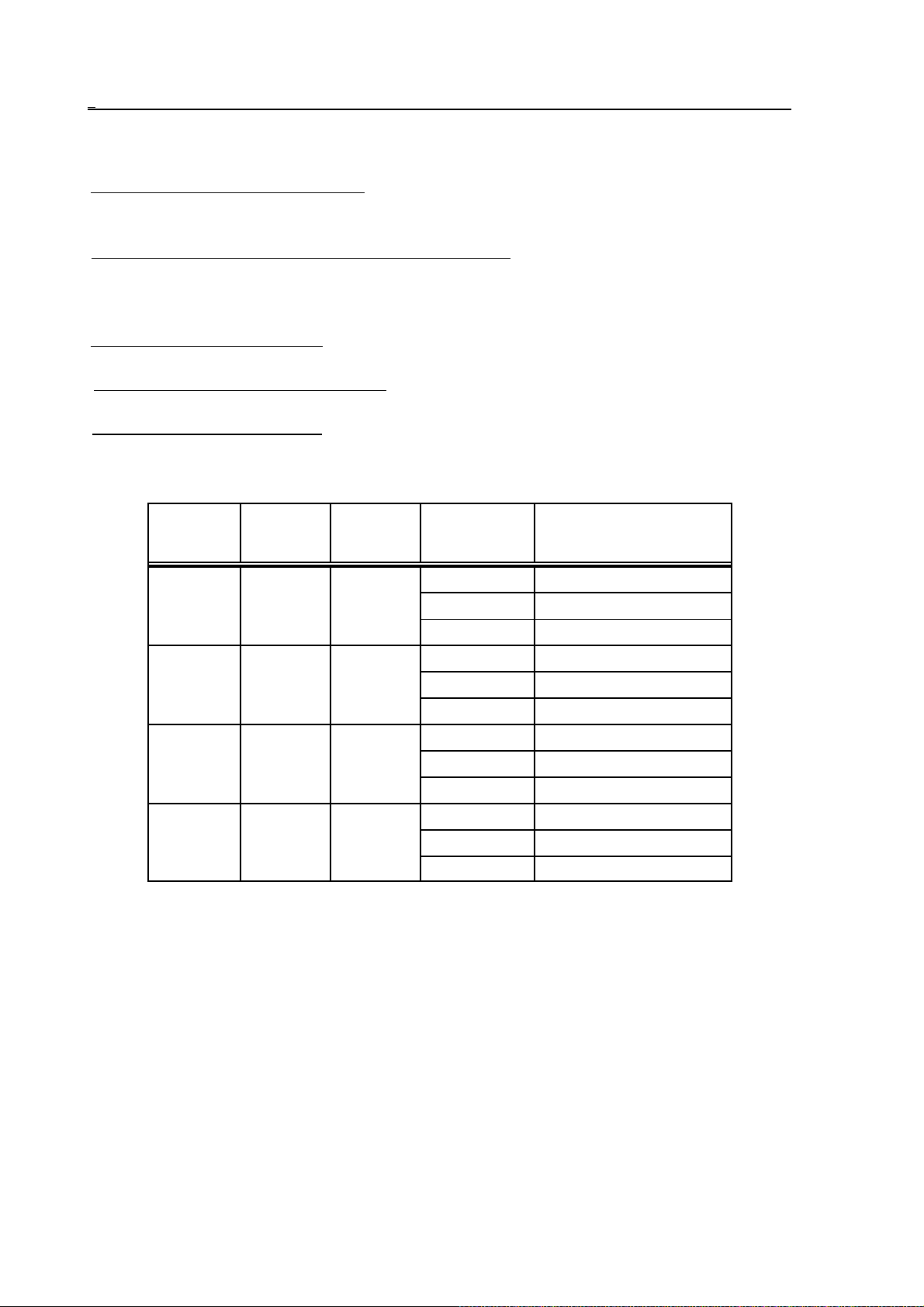
The following table shows the connectors of motherboard and the parameter state belonging to
the physical axis number.
physical
axis No.
1E1A1, N1
2E2A1, N1
3E3A1, N1
4E4A1, N1
encoder
connector
connector
of output
signal
possible
applications
axis
spindle
analog output
axis
spindle
analog output
axis
spindle
analog output
axis
spindle
analog output
parameter
AXIST1=1
IOSELSn=1; AXISTSn=1
COMMANDn=1
AXIST2=1
IOSELSn=2; AXISTSn=1
COMMANDn=2
AXIST3=1
IOSELSn=3; AXISTSn=1
COMMANDn=3
AXIST4=1
IOSELSn=4; AXISTSn=1
COMMANDn=4
Note, that only one function must be defined for one physical input and out put when setting
parameters. E.g.: if the 4th input and output of the board is selected as both axis (W=1 No. 4286,
AXIST4 No. 4444=1 and NOLOOP4 No. 4464=0) and spindle (IOSELS1 No. 5025 =4) it causes
problems in command signal output without error message.
14

1 NCT101 Compact Control
1.3.3 Interface Built on NCT101 Motherboard
Number of interface inputs and outputs:
number of inputs: 48
number of outputs: 32 + Machine On output.
Reference to inputs and outputs can be made in PLC program with commands I0ii and Y0jj,
where
ii: 00, ..., 57, and
jj: 00, ..., 37.
Specification of interface:
– Interface power supply (24 VDC) must be solved by applying external power supply.
– The inputs and outputs are insulated from control electronics,
– Voltage limit: 24 VDC (min. 20 VDC, max. 30 VDC),
– Maximum load of outputs: max. 500 mA (measured on 24VDC),
– Maximum load of inputs: 8,5 mA (measured on 24VDC).
15
1 NCT101 Compact Control
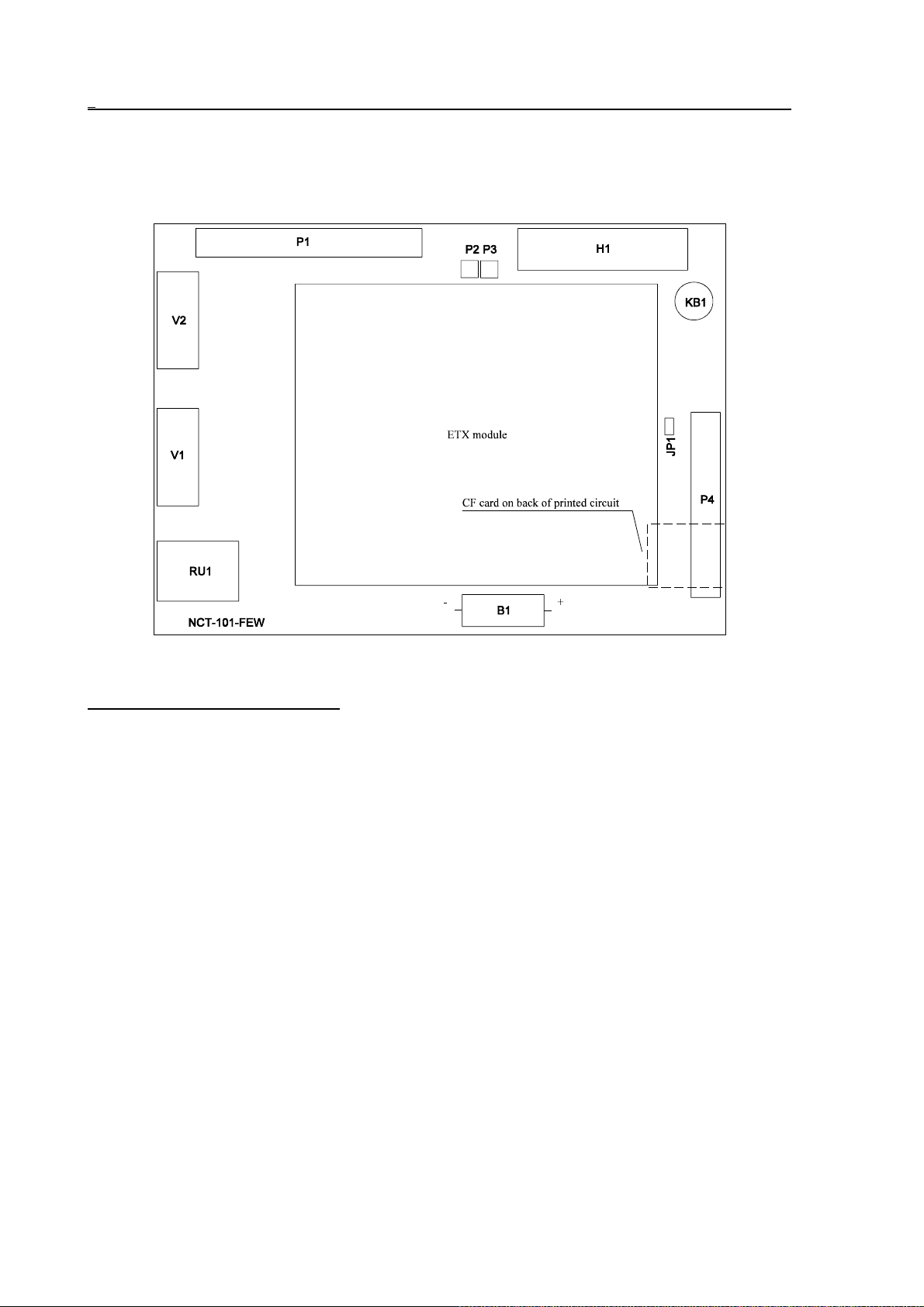
1.4 Optional NCT101 FEW Board
PC board, installed with Windows XP Embedded operating sy stem (FEW unit), can be connected
to NCT101 control.
NCT101 FEW board
Captions of NCT101 FEW board:
– P1: Ribbon cable connector, secures connection with motherboard,
– H1: optional printer (parallel port) connector,
– KB1: PS/2-compatible keyboard connec tor. It can only be used for motherboa rd BIOS setting,
as well as for software installation.
– P4: IDE bus connector. It can only be used for service activities, software installations,
– B1: Lítium battery for real time clock (RTC),
– RU1: combined USB and LAN connector,
– V1: Video signal input connector. It enables connection with motherboard video output (V1)
– V2: output for connecting monitor if FEW board is applied.
– P2, P3: Connector of the power supply of ETX module ventilators.
CF card: CF card stores:
– Windows XP Embedded operating system,
– Fnc program, which secures communication between PC and NC (program transfer in both
directions, DNC mode), as well as which simplifies the writing of part programs,
– Other software(s) installed in FEW unit.
16

2 NCT104 Control with External Operator’s Panel
2 NCT104 Control with External Operator’s Panel
The control with external operator’s panel (NCT104) is made up of two main units:
operator’s panel and
control unit
The operator’s panel containing the monitor, the data input keyboard and optionally the machine
control panel, must be mounted on the machine to an ergonomically optimal place.
The control unit is reasonably mounted in the electric cabinet of the machine.
Basic configuration of NCT104 control with external operator’s panel:
Operator’s panel:
– Monitor: 15" color TFT,
– Alphanumeric keyboard: 79 buttons,
– Number of softkeys: 10,
– Number of menu selection keys: 6,
– Machine control panel: full.
Control unit:
– CPU104 CPU board:
Serial port: 1,
Monitor output: VGA-compatible,
Probe input: max. 4,
CAN bus connector for connection with operator’s panel.
– 1 piece of XMU2000, or XMU CAN measuring system board:
Number of encoder inputs (with spindle): max. 4,
In case of XMU2000: max. 4 analog outputs (with spindle),
In case of XMU CAN: 2 CAN bus connectors for serving 2-2 NCT digital drive.
– 1 piece of INT2000 or INT100 interface board:
Number of interface inputs: max. 56,
Number of interface outputs: max. 32.
Options of NCT104 control with external operator’s panel:
– Handwheel:
Integrated: mounted on front panel,
External: in a separate box, with axis and increment switch, as well as with emergency
stop button, it is connected to operator’s panel with a 2m-long spiral cable,
For each axis: it is po s si ble to mount separate handwheels on axes X and Z in case of
turning controls, whi le on axes X, Y and Z in case of milling controls. The moving of
further axes is possible with a further mutual handwheel.
– Boards extending measuring system: 2 further measuring sy stem boards can be mounted for
extension. Analog (XMU2000) as well as digital (XMU CAN) measuring system boards
can also be mounted in the same system together,
– XMU2000 options:
TACHO board: it generates 4 analog tacho sign als from 4 encoder inputs with frequency
- voltage conversion,
EXEI or EXEV boards: enable for the board to receive sinusoidal encoder signals with
current or voltage output separately for each axis,
17

2 NCT104 Control with External Operator’s Panel
– XMU CAN option:
EXEI or EXEV boards: enable for the board to receive sinusoidal encoder signals with
current or voltage output separately for each axis,
– Interface extension boards: Three further interface boards can be mounted as extension.
INT2000 and INT100 boards can also be mounted together,
– INT100 option:
ADBRD board: enables for the board to receive 4 analog input signals and to convert
them to digital signals, that can be used by PLC program.
– FEW HDD board: PC integrated in control with Winchester (HDD) mass storag e, installed
with WindowsXP operating system. It is only advised in an environment with low
vibration,
– FEW CF board: PC integrated in control with CF card mass storage, installed with
WindowsXP Embedded operating system. It is advised in an environment with high
vibration.
2.1 External Operator’s Panel
The operator’s panel is made up of three main parts:
15" TFT monitor,
data input keyboard,
and machine control panel.
The monitor and data input keyboard are standard accessories of the control.
The external operator’s panel needs separate power supply.
The integrated and the external handwheel are also connected to the external operator’s panel.
18

2 NCT104 Control with External Operator’s Panel
Front panel of control with external operator’s panel
19
2 NCT104 Control with External Operator’s Panel
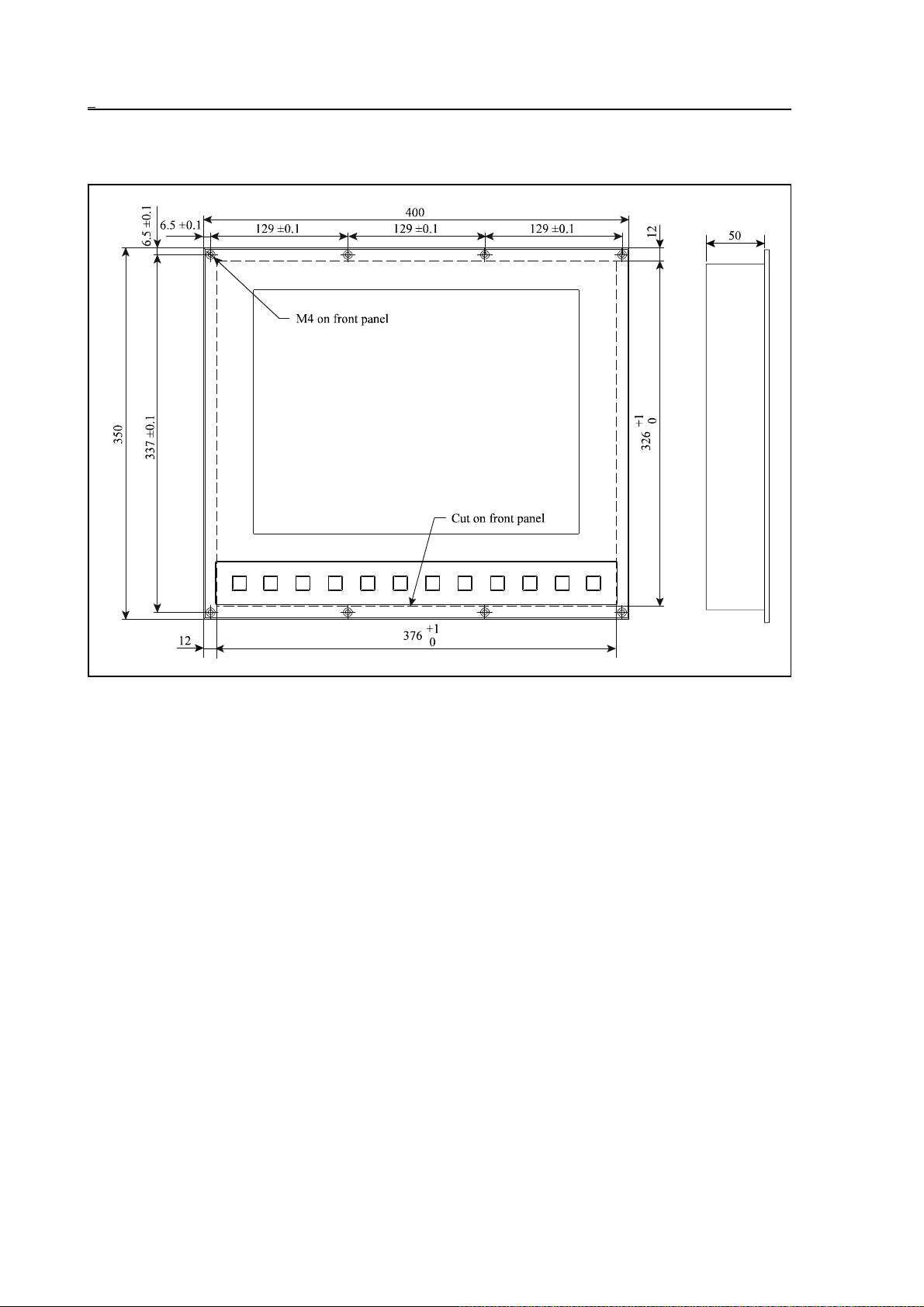
2.1.1 Structure and Mounting Dimensions of Monitor Unit
Mounting dimensions o f 15" TFT monitor and softkeys
Above unit carries 15" color TFT colour monitor and also contains softkeys and page keys.
Power supply of monitor:
100 - 250 VAC, 50/60 Hz, 0,6 A
Buttons setting the monitor (brightness, contrast etc.) can be found on the back of the unit.
Also a ribbon cable connector can be found here, which transfers the signals of the softkeys to
the printed circuit of data input keyboard.
20
2 NCT104 Control with External Operator’s Panel
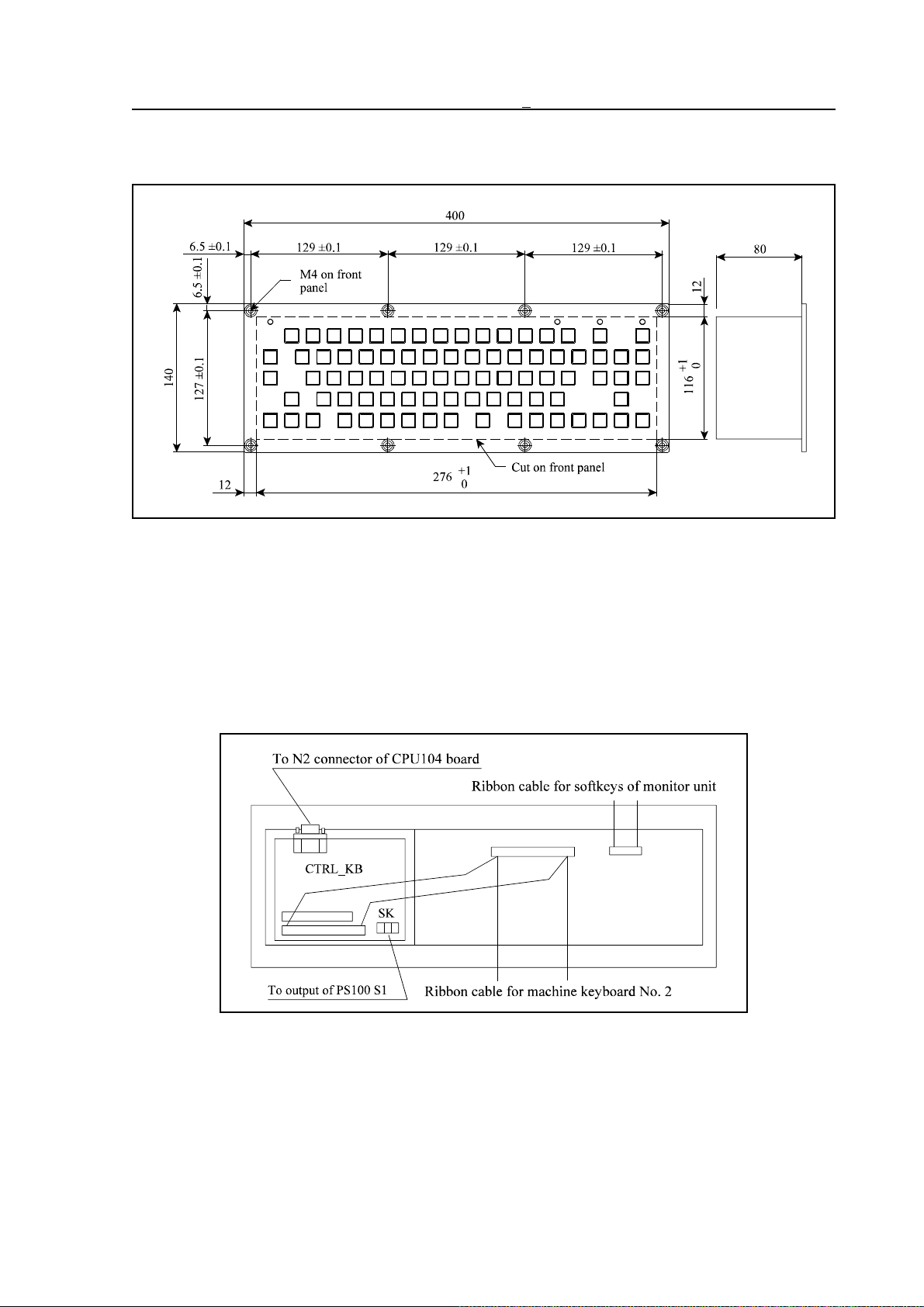
2.1.2 Structure and Mounting Dimensions of Data Input Keyboard
Mounting dimensions o f data input keyboard
The printed circuit for the pushbuttons can be found on the back of the unit. Ribbon cable
connectors are for receiving signals of softkey s on monitor unit and machine keyboard buttons.
The CTRL_KB board is placed above it, which processes and transfers sig nals of operator’s panel
and handwheel through CAN bus to control unit. CTRL_KB board needs power supply, which
is received from the power supply of control unit (PS100). Jumpers setting the way of receiving
of handwheel signals are found here.
Back of data input keyboard
21
2 NCT104 Control with External Operator’s Panel
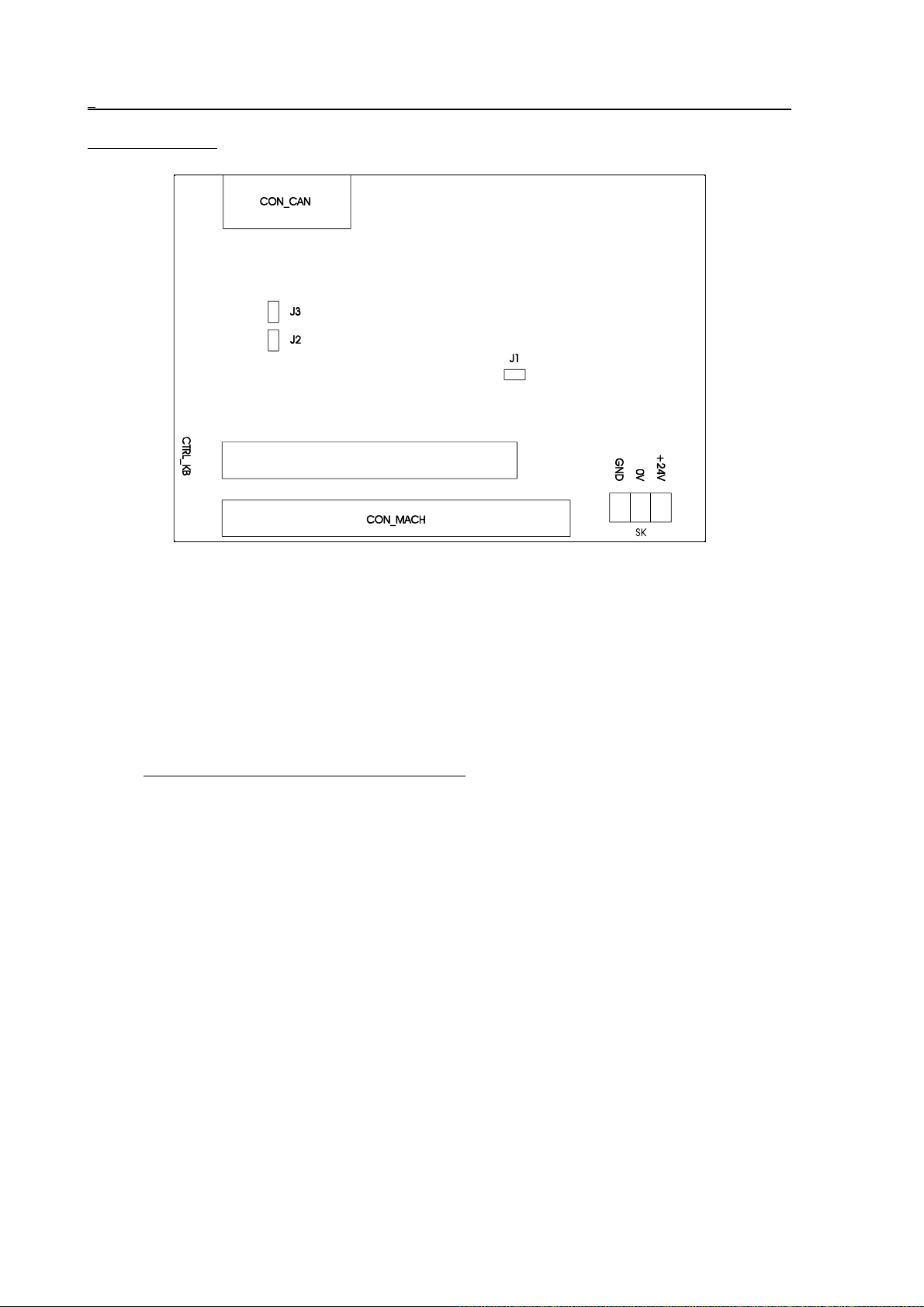
CTRL_KB board
CTRL_KB board
– CON_CAN: CAN bus connector (9p Dsub female). It is connected with connector N2 of
CPU104 control unit board. The external handwheel is also connected here.
– CON_MACH: ribbon cable connector, for connecting keyboards with CTRL_KB.
– SK: power supply connector. It needs 24 VDC. The power supply is received from output S1
of PS100 control unit supply.
Setting handwheel mounted on front panel:
The board can receive handwheel with a resolution of 25 pulse/revolution, or 100
pulse/revolution. The handwheel may also send negated (–A, –B) signals, but it is not necessary .
– J1: If the jumper breaks the two contacts, the board quadruples the handwheel pulses. This is
used in case o f a handwheel with 25 pulse/revolution. In case of a handwheel with a
resolution of 100 pulse/revolution the jumper is left empty.
– J2, J3: If both contact pairs are broken the negated (–A, –B ) signals are not connected to con-
nector H1 of machine control panel.
22
2 NCT104 Control with External Operator’s Panel
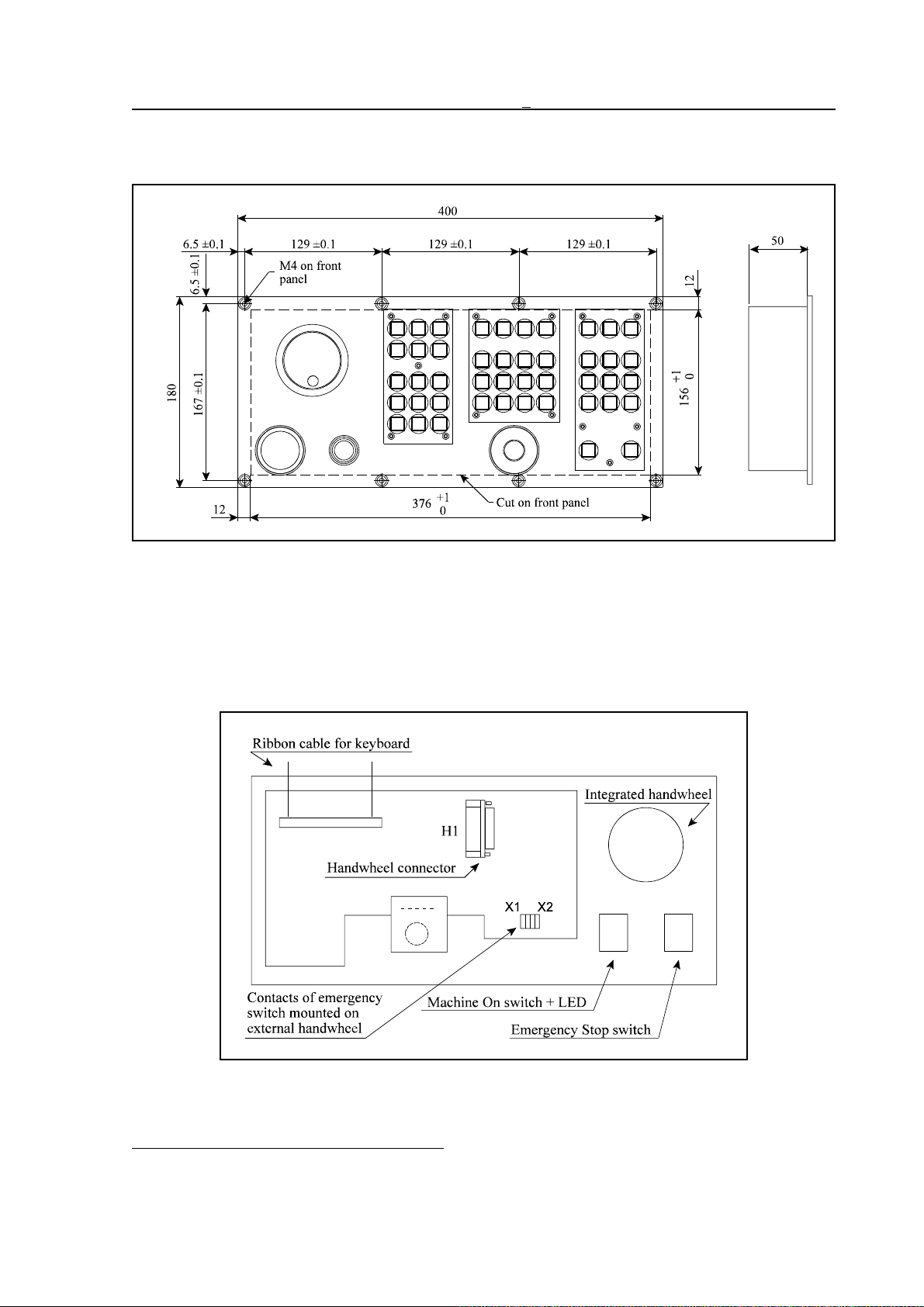
2.1.3 Structure and Mounting Dimensions of Machine Control Panel
Mounting dimensions o f machi ne control panel
Pushbuttons of machine control panel are connected to the control electronics on data input
keyboard with a 50-pin ribbon cable. Two pushbuttons can be found on the machine control
panel, which are connected by the user to the electronic cabinet of the machine. Handwheel can
also be mounted on the machine control panel.
Connecting machine control panel
Description of the signals on the diagram:
– Machine On button: The button contains opening contact, closing contact and LED.
23

2 NCT104 Control with External Operator’s Panel
Allowable ratings of contacts: U
Data of the lamp: U
: 24V, 2.5W.
lámpa
: 250V AC, I
max
: 6A AC.
max
– Emergency Stop button: The button contains two opening contacts.
Allowable ratings of contacts: U
: 250V AC, I
max
: 6A AC.
max
– H1: 25p Dsub connector for receiving signals of handwheel mounted on front panel (integrated
handwheel).
– X1: Wiring strip for receiving signals of the first contact of emergency stop button on external
handwheel. Only 24VDC signals can be connected here!
– X2: Wiring strip for receiving signals of the second contact of emergency stop button on
external handwheel. Only 24VDC signals can be connected here!
24
2 NCT104 Control with External Operator’s Panel
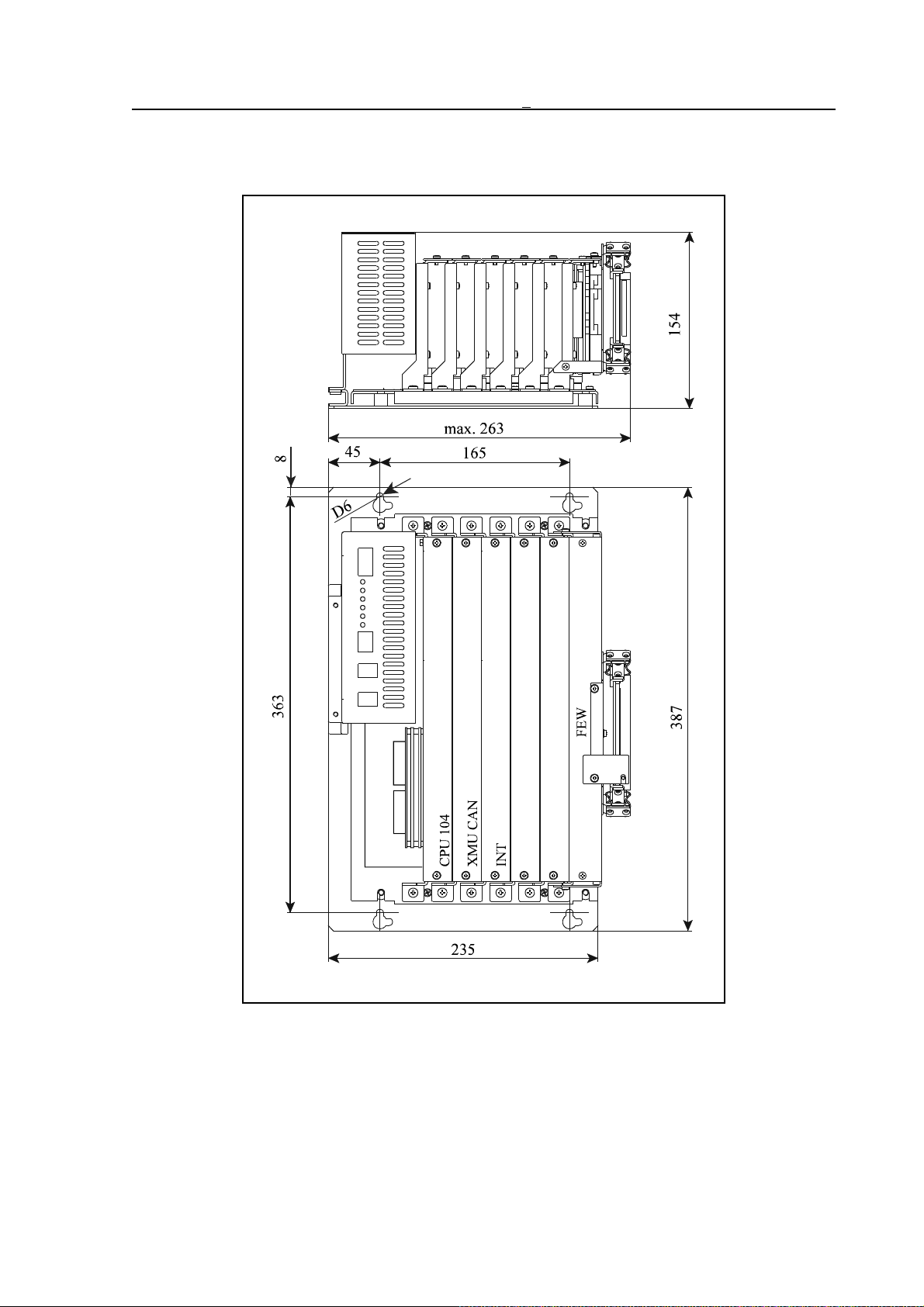
2.2 Structure and Mounting Dimensions of NCT104 Control Unit
Mounting dimensions of NCT104 control units
In basic configuration the control unit contains power supply, CPU104 board, as well as 1 XMU
and 1 INT board. CPU104 board must always be mounted beside the power supply.
25
2 NCT104 Control with External Operator’s Panel
2.3 CPU104 board
1 CPU104 board can be integrated in NCT104 control unit. Reasonably it must be placed beside
the power supply, otherwise it would occupy two board places because of the ETX module on the
back (CPU of the board).
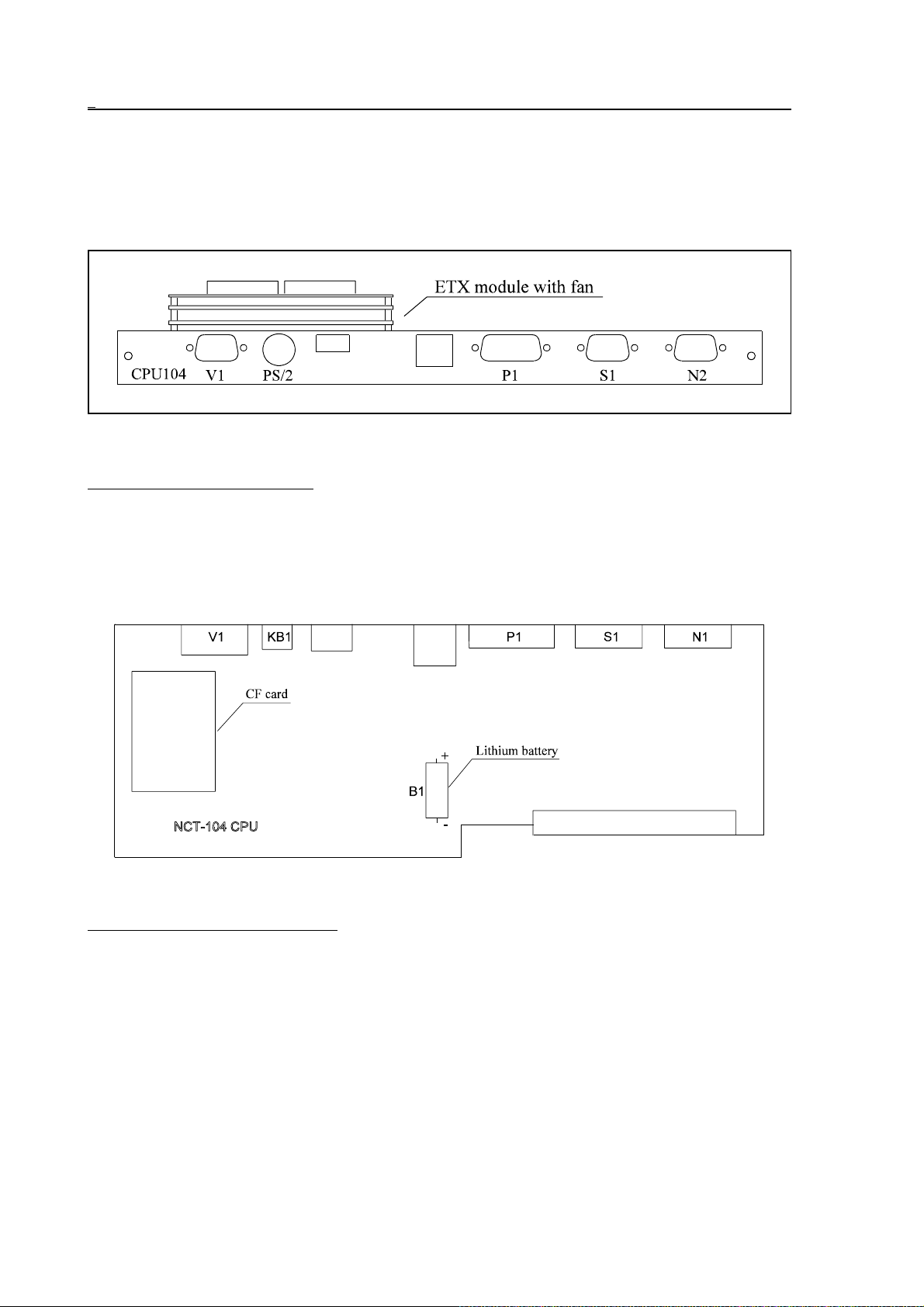
Connectors of the front panel of CPU104 central unit board
Connectors of CPU104 board:
– V1: Video output (VGA-compatible).
– PS/2: PS/2-compatible keyboard connector. I t can only be use d for motherboard BI OS setting.
– P1: connector of probe inputs.
– S1: RS-232C serial port connector.
– N2: CAN bus connector for connecting external operator’s panel.
NCT104 CPU board
Captions of NCT104 CPU board:
For external connectors see above.
– B1: Lithium battery for real time clock (RTC),
CF (Compact Flash) card: CF card stores
– Boot program,
– System software,
– Part programs.
26
2 NCT104 Control with External Operator’s Panel
2.4 XMU Measuring System Boards
At most 3 measuring system boards can be built in NCT104 control unit. Measuring system
boards can also be built misce llaneously, that is both digital (XMU CAN) and analog (XMU2000)
measuring system boards can be built in the same control unit
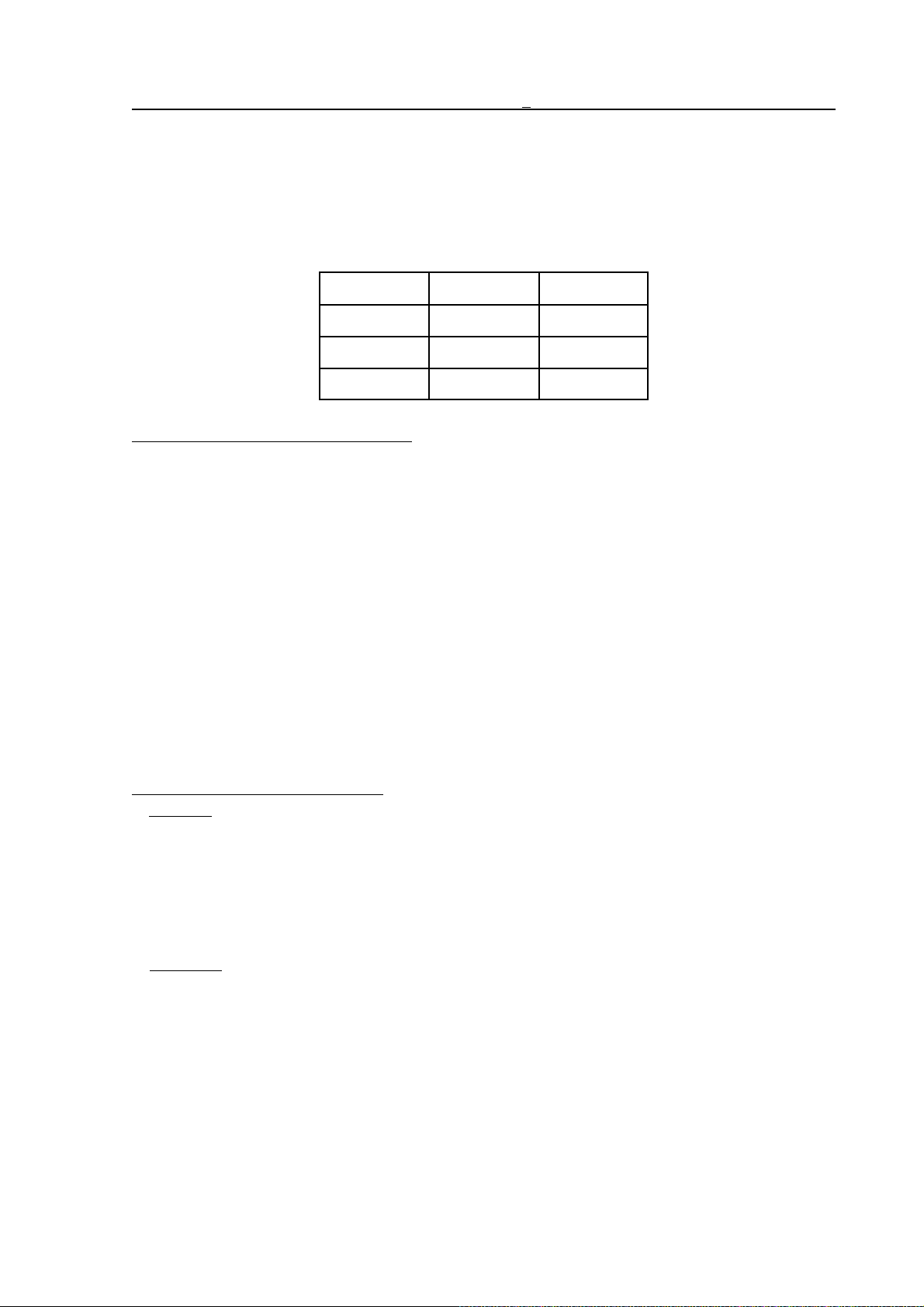
The hardware can be configured by using jumpers J1, J2 found on the board in the following way:
board No. J1 J2
XMU – 1 open open
XMU – 2 closed open
XMU – 3 open closed
Structure of measuring system boards
The measuring system is designed for receiving input signals of 4 encoders and transmitting 4
analog or digital command signals for drives.
Encoder inputs are capable of receiving TTL-level encoder signals. It can optionally be confi-
gured for receiving sinusoidal outputs with EXEI or EXEV board, in this case the receiver
circuit quintuples the sinusoidal signal, than converts them to TTL pulses.
4 analog outputs are designed on XMU2000 board, which transmits the drive speed comma nd
signals. Optionally TACHO board can also be connected to XMU2000 board, which
generates tacho signal from encoder pulses for the drives. Th is can only be used if the
rotating encoder is fixed on the motor axis, it cannot be applied in case of linear scales.
2 CAN bus connectors are mounted on XMU CAN board for the digitally service of 2 drives,
respectively.
The control is capable of handling maximum 8 position controlled axes, 2 spindles and 2 free
purpose analog or digital outputs.
Position controlled axes may be:
– NC axes. NC axes are those which can be reached at addresses defined in part program (X, Y,
...C). The logic axis (reference with letters: X, Y, Z, ...), to which a physical axis
(reference with numbers: 1, 2, ...8) is to be ordered, must be selected in course of
parameter setting in AXIS parameter group. The physical axis selection determines the
number of the encoder input, from which e.g. axis X receives the encoder pulses needed
for position feedback, as well as the pin number of analog output connector from which
the analog command signal is transmitted for drive X.
– PLC axes
. Reference cannot be made directly for PLC axes from part program. They receive
movement command through PLC prog ram in course of function execution. PLC signals
the fact, that the given axis receives its control from it, by setting flags Y630, ..., Y637 to
1. The flags must always be handled according to physical axis number.
The control can only handle axes of the first two YMU boards for each axes.
Spindles, which may need encoder input and command signal output, can be set for all three
boards, even if it need to be oriented and positioned.
Free purpose analog (or digital) outputs can also be used for all three boards.
27
2 NCT104 Control with External Operator’s Panel
Encoder inputs can be used as:
For position feedback of position-controlled axes. Parameter NOLOOPn No. 446n must be set
to 0. In this case the control sends analog speed command signal through the appropriate
analog output (if value of parameter DIGITALn No. 486n is 0 ) to the drive, if the value
of parameter DIGITALn No. 486n is 1 it sends digital command signal throug h CAN bus
after processing encoder data.
Position measure inputs of non-position-controlled axes. Parameter NOLOOPn No. 446n must
be set to 1. In this case the encoder signals are only used for path measure and position
display, there is no command signal output throug h analog (or dig ital) output belonging
to encoder input.
Receiving signals of spindle encoders. Parameter IOSELS1 No. 5025 determines, which encoder
input is used for spindle.
Analog (or digital) outputs can be used as:
Speed command signal output of position controlled axes. Parameter NOLOOPn No. 446n must
be set to 0. In this case the control calculates speed command signal from signals of
encoder input belonging to analog (or digital) output, and sends command signal to the
drive.
Spindle command signal output. The output determined by parameter IOSELS1 No. 5025 is used
for spindle speed command signal output.
Free purpose analog (or digital) output. Outputs determined by parameter COMMANDn No.
010n, which can be programmed through PLC registers, can be used optionally.
Tacho output (speed feedback). In case of motherboard mounted with optional tacho board.
The following table shows the connector of XMU board and the parameter state belonging to the
physical axis number.
28
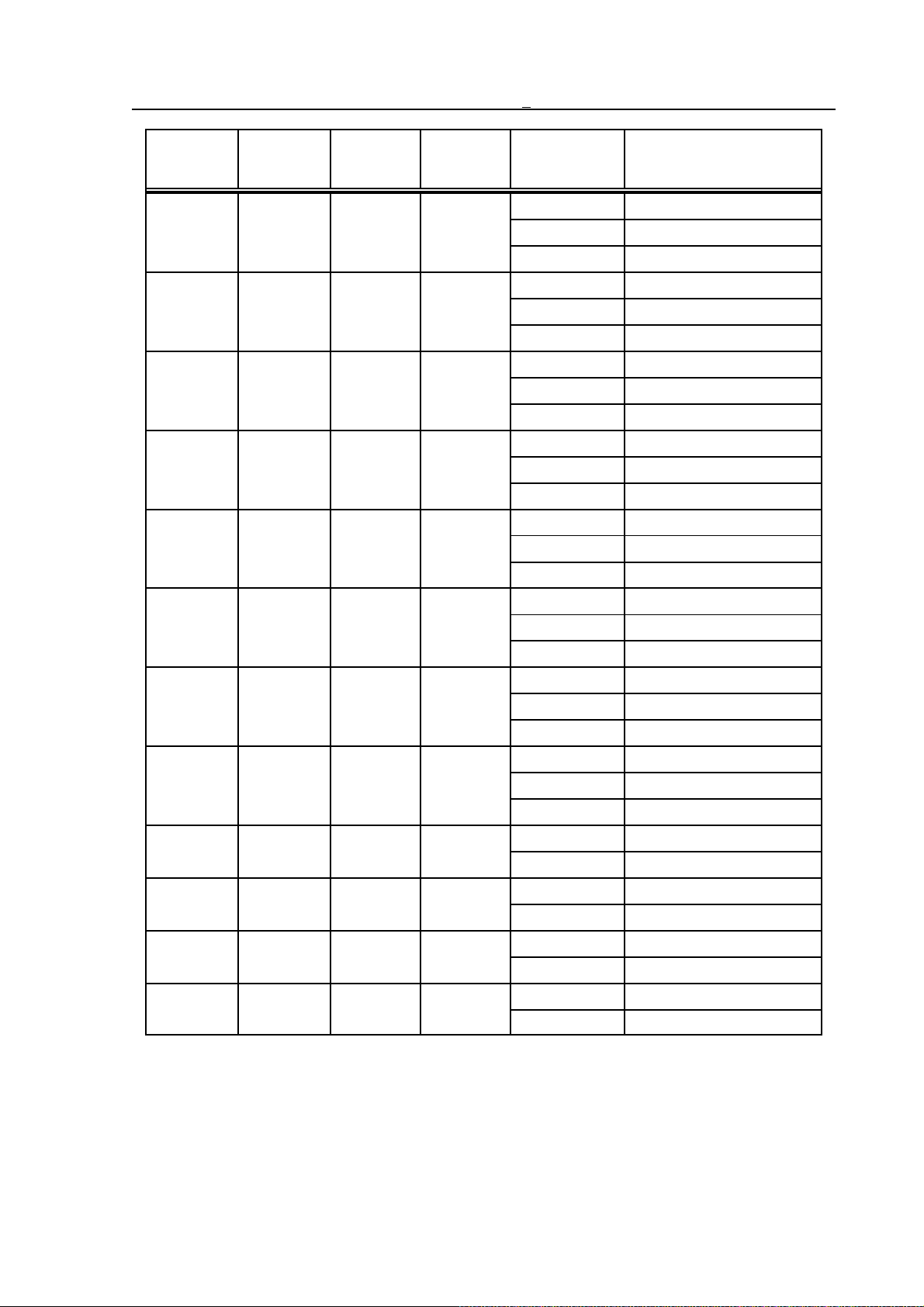
2 NCT104 Control with External Operator’s Panel
physical
axis No.
1XMU–1E1A1, C1
2XMU–1E2A1, C1
3XMU–1E3A1, C2
4XMU–1E4A1, C2
5XMU–2E1A1, C1
6XMU–2E2A1, C1
7XMU–2E3A1, C2
8XMU–2E4A1, C2
9XMU–3E1A1, C1
10 XMU–3 E2 A1, C1
11 XMU–3 E3 A1, C2
12 XMU–3 E4 A1, C2
board No.
encoder
connector
output
signal
connector
possible
application
axis
spindle
analog output
axis
spindle
analog output
axis
spindle
analog output
axis
spindle
analog output
axis
spindle
analog output
axis
spindle
analog output
axis
spindle
analog output
axis
spindle
analog output
spindle
analog output
spindle
analog output
spindle
analog output
spindle
analog output
parameter
AXIST1=1
IOSELSn=1; AXISTSn=1
COMMANDn=1
AXIST2=1
IOSELSn=2; AXISTSn=1
COMMANDn=2
AXIST3=1
IOSELSn=3; AXISTSn=1
COMMANDn=3
AXIST4=1
IOSELSn=4; AXISTSn=1
COMMANDn=4
AXIST5=1
IOSELSn=5; AXISTSn=1
COMMANDn=5
AXIST6=1
IOSELSn=6; AXISTSn=1
COMMANDn=6
AXIST7=1
IOSELSn=7; AXISTSn=1
COMMANDn=7
AXIST8=1
IOSELSn=8; AXISTSn=1
COMMANDn=8
IOSELSn=9; AXISTSn=1
COMMANDn=9
IOSELSn=10; AXISTSn=1
COMMANDn=10
IOSELSn=11; AXISTSn=1
COMMANDn=11
IOSELSn=12
COMMANDn=12
; AXISTSn=1
Note, that only one functio n must be defined for one physical input and output when setting
parameters. E.g.: if the 4th input and output of the board is selected as both axis (W=1 No. 4286
, AXIST4 No. 4444=1 and NOLOOP4 No. 4464=0) and spindle (IOSELS1 No. 5025 =4) it causes
problems in command signal output without error message.
The control is only capable of handling axes of the first two XMU boards for each axis.
29
2 NCT104 Control with External Operator’s Panel
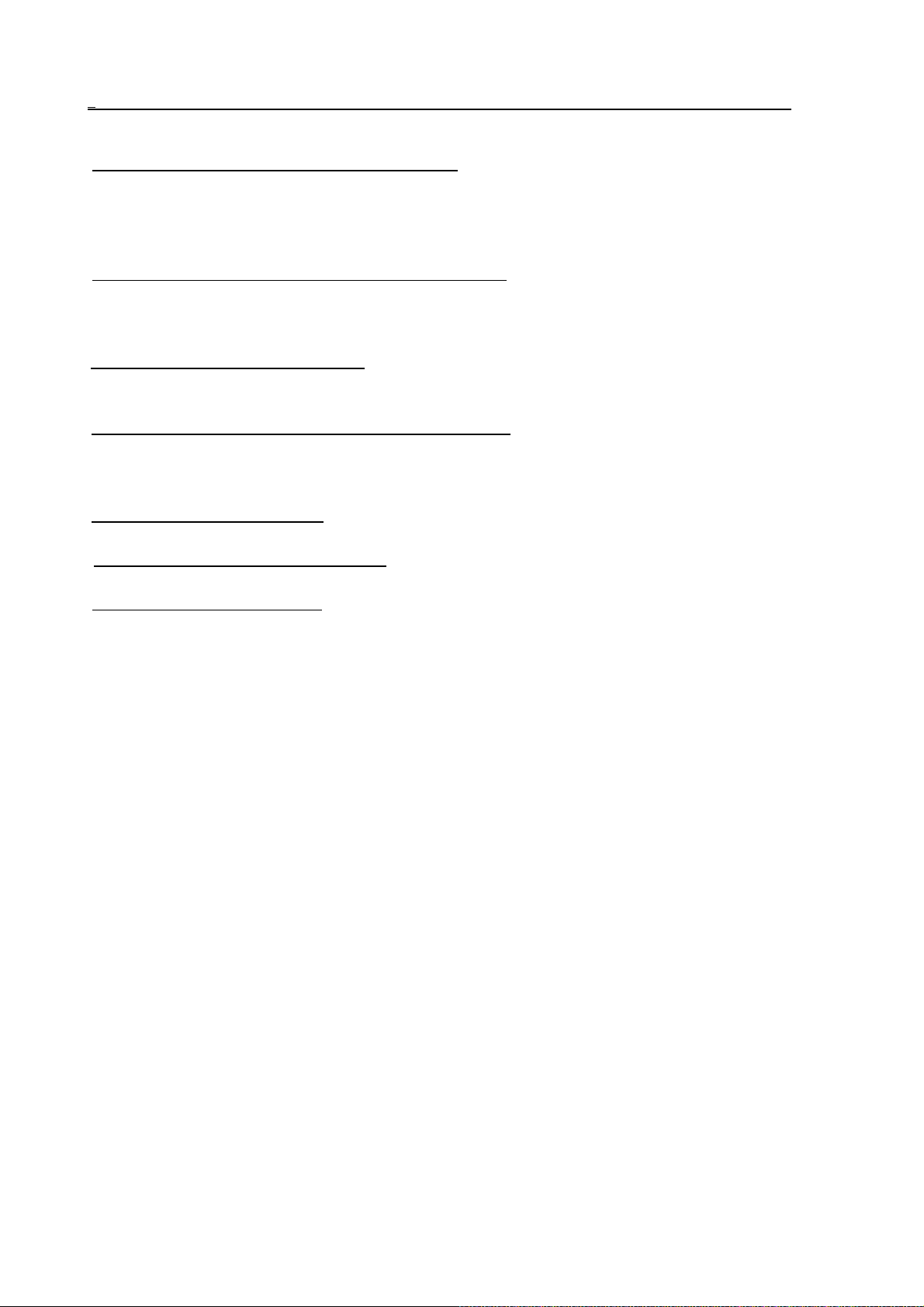
2.4.1 XMU2000 Analog Measuring System Board
Connectors of front panel of XMU2000 analog measuring system board
Connectors of XMU2000 analog measuring system board:
– A1: Connector of analog outputs to drives.
– E1, ..., E4: Connectors of Encoder inputs.
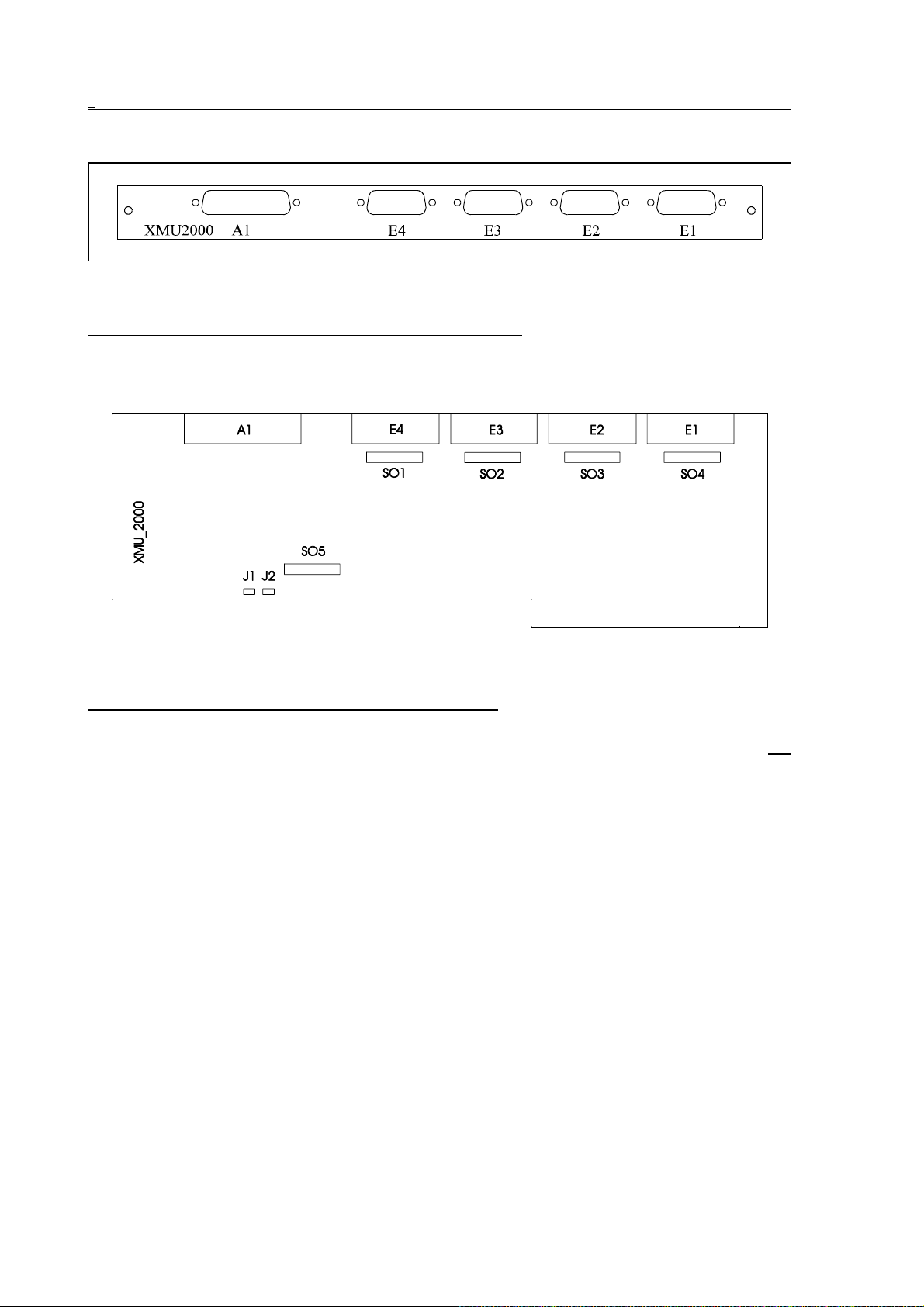
XMU2000 analog measuring system board
Captions of XMU2000 analog measuring system board
For external connectors see above.
– J1, J2: configuration jumper s, with which the board number can be selected. See chapter 2.4
XMU Measuring System Boards on page 27.
– SO1, ..., SO4: Connectors of optional EXEI or EXEV boards converting signals of sinusoidal
encoders.
– SO6: Connector of optional TACHO board.
30
 Loading...
Loading...