

Page 1

P/N: 96-312008-3001
Page 2

Onyx Technical Reference Manual Rev. A
Table of Contents
Table of Contents ...................................................................................................................... ii
List of Tables ............................................................................................................................ xi
List of Figures ........................................................................................................................ xvi
Notices ..................................................................................................................................... 17
Copyright ............................................................................................................................................ 17
NavCom and Deere & Company Relationship ................................................................................... 17
Trademarks ........................................................................................................................................ 17
User Notice ......................................................................................................................................... 17
Software License Agreement ............................................................................................................. 17
Revision History ...................................................................................................................... 19
Use of This Document ............................................................................................................ 22
Related Documents ................................................................................................................................ 22
Onyx Integration Guide P/N 96-310041-3001 .................................................................................... 22
StarUtil 5000 User Guide P/N 96-310029-3001 ................................................................................. 22
RINEXUtil User Guide P/N 96-310021-2101..................................................................................... 22
Technical Reference Manual P/N 96-312008-3001 ........................................................................... 22
NavCom Release Notes ..................................................................................................................... 22
Related Standards.................................................................................................................................. 23
ICD-GPS-200 ..................................................................................................................................... 23
RTCM-SC-104 .................................................................................................................................... 23
CMR, CMR+ ....................................................................................................................................... 23
NMEA-0183 ........................................................................................................................................ 23
QZSS 23
Publicly Operated SBAS Signa ls ........................................................................................................ 23
RTCA/DO-229D ............................................................................................................................. 23
WAAS (Wide Area Augmentation System) .................................................................................... 23
EGNOS (European Geostationary Navigation Overlay Service) ................................................... 23
MSAS (MTSAT Satellite-based Augmentation System) ................................................................ 23
GAGAN (GPS Aided Geo Augmented Na vig at ion) ....................................................................... 23
Fundamental Onyx Message Block Formats ........................................................................ 24
Message Application .............................................................................................................................. 24
Software Ensemble ................................................................................................................................ 24
Message Query ...................................................................................................................................... 24
Onyx ASCII Input Commands ................................................................................................................ 24
ASCII Message Organization ............................................................................................................. 24
ASCII Input Command Parsing Rules ................................................................................................ 25
Command Mnemonic Parsing ........................................................................................................ 25
Argument String Parsing ................................................................................................................ 25
Optional CRC Field (*CRC) ........................................................................................................... 26
Parser Pseudocode ........................................................................................................................ 26
Examples of ASCII Input Commands and Responses ....................................................................... 26
Onyx Output Messages .......................................................................................................................... 27
Binary Output Message Organization ................................................................................................ 28
Message Updates & Software Revisions ............................................................................................... 30
Factory Default Profile ............................................................................................................................ 31
Profile Functionality ................................................................................................................................ 32
NMEA Messages Overview ................................................................................................................... 32
GPS Week Number ................................................................................................................................ 34
GPS Time ............................................................................................................................................... 35
System Control & Response Commands .............................................................................. 36
1 Onyx Input Commands Detailed Formats ...................................................................... 36
1.1 1PPS (ASCII) ............................................................................................................................ 36
1.2 2DNAVMODE (ASCII) ............................................................................................................... 37
1.3 3RDPARTYRTKGLONASS ...................................................................................................... 38
1.4 3RDPARTYRTKX ..................................................................................................................... 39
ii
Page 3

Onyx Technical Reference Manual Rev. A
1.5 ALM1B ....................................................................................................................................... 40
1.6 ANTALIGN (ASCII) ................................................................................................................... 41
1.7 ANTENNAHEIGHT (ASCII) ....................................................................................................... 42
1.8 ANTENNAINFO (ASCII) ............................................................................................................ 43
1.9 ANTLIST .................................................................................................................................... 44
1.10 ANTPOWER.............................................................................................................................. 45
1.11 ANTREMOTE ............................................................................................................................ 46
1.12 ANTSWAP ................................................................................................................................. 47
1.13 ARLENGTHCONSTR (ASCII) ................................................................................................... 48
1.14 AUTOSCHEDULEDTM ............................................................................................................. 49
1.15 BOOTLOADA (ASCII) ............................................................................................................... 50
1.16 BOOTLOADB ............................................................................................................................ 51
1.16.1 Bootload Input File Format..................................................................................................... 51
1.16.1.1 SF-5050 S0 Record Format.......................................................................................... 51
1.16.2 BOOTLOADB Message Body General Format ..................................................................... 52
1.16.2.1 Function Type ............................................................................................................... 52
1.16.2.2 Pass or Fail ................................................................................................................... 53
1.16.2.3 Valid Count ................................................................................................................... 53
1.16.2.4 Address ......................................................................................................................... 53
1.16.2.5 Data .............................................................................................................................. 54
1.16.3 BootloadB SubID Message Format ....................................................................................... 54
1.16.3.1 SubID NB_PingCmd Message Format ......................................................................... 54
1.16.3.2 SubID NB_PingRep Message Format .......................................................................... 55
1.16.3.3 SubID NB_BaudCmd Message Format ........................................................................ 55
1.16.3.4 SubID NB_BaudRep Message Format ......................................................................... 56
1.16.3.5 SubID NB_SetupCmd Message Format ....................................................................... 56
1.16.3.6 SubID NB_SetupRep Message Format ........................................................................ 57
1.16.3.7 SubID NB_LoadDataCmd Message Format ................................................................ 57
1.16.3.8 SubID NB_LoadDataRep Message Format ................................................................. 57
1.16.3.9 SubID NB_ChkCrcCmd Message Format .................................................................... 58
1.16.3.10 SubID NB_ChkCrcRep Message Format ................................................................. 58
1.16.3.11 SubID NB_ProgCmd Message Format .................................................................... 59
1.16.3.12 SubID NB_EraseRep Message Format ................................................................... 59
1.16.3.13 SubID NB_WriteFRep Message Format .................................................................. 60
1.16.3.14 SubID NB_Working Message Format ...................................................................... 60
1.16.3.15 SubID NB_ResetCmd Message Format .................................................................. 60
1.16.3.16 SubID NB_ResetRep Message Format ................................................................... 60
1.16.4 GNSS Software Loading Sequence ...................................................................................... 61
1.17 BOOTLOADPIOB ...................................................................................................................... 63
1.17.1 Message General Format ...................................................................................................... 63
1.17.1.1 Function Type ............................................................................................................... 63
1.17.1.2 Pass or Fail ................................................................................................................... 64
1.17.1.3 Valid Count ................................................................................................................... 64
1.17.1.4 Address ......................................................................................................................... 64
1.17.1.5 Data .............................................................................................................................. 64
1.17.2 BOOTLOADPIOB SubID Message Form at ........................................................................... 64
1.17.2.1 SubID NB_PingCmd Message Format ........................................................................ 65
1.17.2.2 SubID NB_PingRep Message Format .......................................................................... 65
1.17.2.3 SubID NB_BaudCmd Message Format ........................................................................ 65
1.17.2.4 SubID NB_BaudRep Message Format ......................................................................... 65
1.17.2.5 SubID NB_SetupCmd Message Format ....................................................................... 66
1.17.2.6 SubID NB_SetupRep Message Format ........................................................................ 66
1.17.2.7 SubID NB_LoadDataCmd Message Format ................................................................ 66
1.17.2.8 SubID NB_LoadDataRep Message Format ................................................................. 67
1.17.2.9 SubID NB_ ChkCrcCmd Message Format ................................................................... 67
1.17.2.10 SubID NB_ChkCrcRep Message Format ................................................................. 68
1.17.2.11 SubID NB_ProgCmd Message Format .................................................................... 68
1.17.2.13 SubID NB_EraseRep Message Format ................................................................... 69
iii
Page 4

Onyx Technical Reference Manual Rev. A
1.17.2.14 SubID NB_WriteFRep Message Format .................................................................. 69
1.17.2.15 SubID NB_Working Message Format ...................................................................... 69
1.17.2.16 SubID NB_ResetCmd Message Format .................................................................. 69
1.17.2.17 SubID NB_ResetRep Message ................................................................................ 70
1.26.3 PIO Software Loading Sequence ........................................................................ 70
1.18 BTSET ....................................................................................................................................... 72
1.19 CANCELSFLICENSE ................................................................................................................ 74
1.20 CHECKCRC .............................................................................................................................. 75
1.21 COLDSTART............................................................................................................................. 76
1.22 CONFIGGFA ............................................................................................................................. 77
1.23 DATUM ASCII ........................................................................................................................... 78
1.36.1Reference Frame at Default State ............................................................................................ 78
1.36.2 Reference Frame at Non-Default State ................................................................................... 78
1.23.4 Special Considerations for the RTCM and RTK-Base d Sol uti ons ......................................... 79
1.23.5 Command Format and Usage ............................................................................................... 79
1.23.6 Ellipsoid Model ....................................................................................................................... 81
1.23.7 Transformation Models .......................................................................................................... 81
1.23.7.1 Three-Parameter Transformation ................................................................................. 81
1.23.7.2 Seven-Parameter Transformation ................................................................................ 82
1.23.7.3 Fourteen-Parameter Transformation ............................................................................ 82
1.24 DEFINESFSAT (ASCII) ............................................................................................................. 83
1.25 DNSOVERRIDE ........................................................................................................................ 84
1.26 DYNAMICS (ASCII) .................................................................................................................. 85
1.27 ENABLEALL .............................................................................................................................. 87
1.28 ENABLEGEOFENCE ................................................................................................................ 88
1.29 ENABLERTCM2.3 ..................................................................................................................... 89
1.30 ERASEALM ............................................................................................................................... 90
1.31 ERASEEPH ............................................................................................................................... 91
1.32 ETHCONFIG ............................................................................................................................. 92
1.33 ETHSTAT .................................................................................................................................. 93
1.34 ETHVCOM ................................................................................................................................ 94
1.34.1 ETHVCOM Application note .................................................................................................. 96
1.34.2 ETHVCOM Setup and Configuration Example ...................................................................... 97
1.35 EVENTLATCH........................................................................................................................... 99
1.36 EVENTLATCHVOLTSEL ........................................................................................................ 100
1.37 EXTRAPBASE ........................................................................................................................ 101
1.38 FIXBASELINE ......................................................................................................................... 102
1.39 FORCETALKERID .................................................................................................................. 103
1.40 FSCD ....................................................................................................................................... 104
1.41 FSCOPY .................................................................................................................................. 105
1.42 FSCWD ................................................................................................................................... 106
1.43 FSDELETE .............................................................................................................................. 107
1.44 FSDIR ...................................................................................................................................... 108
1.45 FSDRIVE ................................................................................................................................. 109
1.46 FSFORMAT ............................................................................................................................. 110
1.47 FSLOAD .................................................................................................................................. 111
1.48 FSMKDIR ................................................................................................................................ 113
1.49 FSRENAME ............................................................................................................................ 114
1.50 FSRMDIR ................................................................................................................................ 115
1.51 FSSPACE ................................................................................................................................ 116
1.52 FTPCONTROL ........................................................................................................................ 117
1.53 FTPUSERS ............................................................................................................................. 118
1.54 GEOIDALMODEL ................................................................................................................... 119
1.55 GGAMODE .............................................................................................................................. 122
1.56 GGM02STATUS ..................................................................................................................... 123
1.57 GLALM1B ................................................................................................................................ 124
1.58 GNALM1B ............................................................................................................................... 125
1.59 GPSALM1B ............................................................................................................................. 126
iv
Page 5

Onyx Technical Reference Manual Rev. A
1.60 GREETING .............................................................................................................................. 127
1.61 INCLINECONSTR ................................................................................................................... 128
1.62 INPUTSFLICENSE ................................................................................................................. 129
1.63 INPUTSWOPTION .................................................................................................................. 130
1.64 L1FALLBACK .......................................................................................................................... 131
1.65 LOADBULKB ........................................................................................................................... 132
1.66 LOGFILE ................................................................................................................................. 133
1.67 LOGFILEAUTOSTART ........................................................................................................... 134
1.68 LOGFILEBGDELETE .............................................................................................................. 135
1.69 LOGFILEBGENABLE .............................................................................................................. 136
1.70 LOGFILEBGSETTIMELIMIT ................................................................................................... 137
1.71 LOGFILEDRIVE ...................................................................................................................... 138
1.72 LOGFILEDRIVEFULLSEL ...................................................................................................... 139
1.73 LOGFILENAME ....................................................................................................................... 140
1.74 LOGFILESTATUS ................................................................................................................... 141
1.75 LOGFILETIME......................................................................................................................... 142
1.76 MPAUTOCONNECT ............................................................................................................... 143
1.77 MSGSTANDARD .................................................................................................................... 144
1.78 NAVELEMASK ........................................................................................................................ 145
1.79 NAVMEASUSE ....................................................................................................................... 146
1.80 NTRIPCLIENT ......................................................................................................................... 148
1.81 NTRIPCONFIG........................................................................................................................ 151
1.82 NTRIPSERVER ....................................................................................................................... 153
NTRIP Server Status Messages .......................................................................................... 153
1.83 NUMANTENNAS .................................................................................................................... 155
1.84 OUTPUT .................................................................................................................................. 156
1.85 PACKB .................................................................................................................................... 159
1.85.1 Format .................................................................................................................................. 159
1.85.2 Port ....................................................................................................................................... 159
1.85.3 Correction Data .................................................................................................................... 159
1.85.4 Theory of Operation ............................................................................................................. 161
1.85.5 Limitations and Points of Interest ......................................................................................... 161
1.85.5.1 Header Format ............................................................................................................ 161
1.85.5.2 Correction Data/Onyx Command Sequence .............................................................. 161
1.85.5.3 Error Handling ............................................................................................................. 161
1.87 PASSTHRU ............................................................................................................................. 162
1.88 PDOPLIMIT ............................................................................................................................. 164
1.89 PING ........................................................................................................................................ 165
1.90 PORT ...................................................................................................................................... 166
1.91 POWERMODE ........................................................................................................................ 167
1.92 PRDGPSMODE ...................................................................................................................... 168
1.93 PRDGPSTIMEOUT ................................................................................................................. 169
1.94 PROCESSRATE ..................................................................................................................... 170
1.95 PROFILE ................................................................................................................................. 171
1.96 RADIO ..................................................................................................................................... 173
1.97 RADIOVERSION ..................................................................................................................... 175
1.98 RAPIDRECOVERY ................................................................................................................. 176
1.99 REFNAME ............................................................................................................................... 177
1.100 REFSTNPOS .......................................................................................................................... 178
1.101 RTKFIXMODE ......................................................................................................................... 179
1.102 RTKFLOATTIMEOUT ............................................................................................................. 180
1.103 RTKMODE .............................................................................................................................. 181
1.104 RTKMULTIPATH ..................................................................................................................... 186
1.105 RTKNAVRESET ...................................................................................................................... 187
1.106 RTKSYNCMODE .................................................................................................................... 188
1.107 RTKTIMEOUT ......................................................................................................................... 189
1.108 SBASLIST ............................................................................................................................... 190
1.109 SELFSURVEY......................................................................................................................... 191
v
Page 6

Onyx Technical Reference Manual Rev. A
1.110 SERIALMODE ......................................................................................................................... 192
1.111 SETPOSITION ........................................................................................................................ 193
1.112 SETSFALMSWITCHMODE .................................................................................................... 194
1.113 SETTIME ................................................................................................................................. 195
1.114 SETUTCOFFSET .................................................................................................................... 196
1.115 SFALMENABLENEW .............................................................................................................. 197
1.116 SFCORRSELECT ................................................................................................................... 198
1.117 SFNETPRIORITY ................................................................................................................... 200
1.118 SFQUICKSTART .................................................................................................................... 201
1.119 SHUTDOWN ........................................................................................................................... 203
1.120 SIMULATORSTART ............................................................................................................... 205
1.121 SOLIDEARTHTIDE ................................................................................................................. 206
1.122 STARFIREALTSAT ................................................................................................................. 207
1.123 STARFIREMODE .................................................................................................................... 209
1.124 STDDEVMODE ....................................................................................................................... 210
1.125 TRACKELEVMASK ................................................................................................................. 211
1.126 TRACKINGMODE (ASCII) ...................................................................................................... 212
1.127 UPTIME ................................................................................................................................... 214
1.129 USBMODE .............................................................................................................................. 215
1.130 USEPROFILE.......................................................................................................................... 217
1.131 USERANTTYPE ...................................................................................................................... 219
1.133 USERANTTYPEB ................................................................................................................... 223
1.134 VERSION ................................................................................................................................ 224
1.135 WARMSTART (ASCII) ............................................................................................................ 226
1.136 WEBCONTROL....................................................................................................................... 227
1.137 WEBLOADB ............................................................................................................................ 228
1.137.1 Message General Format .................................................................................................... 228
1.137.1.2 Function Type ......................................................................................................... 229
1.137.1.3 Pass or Fail............................................................................................................. 229
1.137.1.4 Valid Count ............................................................................................................. 229
1.137.1.5 Address .................................................................................................................. 229
1.137.1.6 Data ........................................................................................................................ 229
1.137.2 WEBLOADB SubID Message Format ................................................................................. 229
1.137.2.1 SubID WB_PingCmd Message Format .................................................................. 229
1.137.2.2 SubID WB_PingRep Message Format ................................................................... 230
1.137.2.3 SubID WB_SetupCmd Message Format ............................................................... 230
1.137.2.4 SubID WB_SetupRep Message Format ................................................................ 230
1.137.2.5 SubID WB_LoadDataCmd Message Format ......................................................... 231
1.137.2.6 SubID WB_LoadDataRep Message Format .......................................................... 231
1.137.2.7 SubID WB_ ChkCrcCmd Message Format ............................................................ 231
1.137.2.8 SubID WB_ChkCrcRep Message Format .............................................................. 232
1.137.2.9 SubID WB_WriteCmd Message Format ................................................................ 232
1.137.2.10 SubID WB_WriteRep Message Format ................................................................. 232
1.137.3 PIO Webpage Loading Sequence ....................................................................................... 233
1.138 WEBUSERS ............................................................................................................................ 234
1.139 WIFICLIENT ............................................................................................................................ 236
1.140 WIFICONFIG ........................................................................................................................... 239
1.141 WIFICONTROL ....................................................................................................................... 240
1.142 WIFIPASSKEY ........................................................................................................................ 242
1.144 WIFIVERSION......................................................................................................................... 243
1.145 WRAPPEDRTK ....................................................................................................................... 244
1.145.1 PackB Wrappter Format ...................................................................................................... 244
2 Onyx Output Messages Detailed Formats ................................................................... 247
2.1 1PPSA (ASCII) ........................................................................................................................ 247
2.2 ALM1B (Version 1) .................................................................................................................. 248
2.2.1 G PS Almanac ...................................................................................................................... 248
2.2.2 GLO NAS S Alm anac ............................................................................................................. 248
2.2.3 SBAS Almanac .................................................................................................................... 249
vi
Page 7

Onyx Technical Reference Manual Rev. A
2.3 BASEINFOA ............................................................................................................................ 250
2.4 CHNLSTATUS1B (Version 3) ................................................................................................. 251
2.4.1 Cooperative Tracking and StarFire CNØ ............................................................................. 251
2.4.2 StarFire Tracking Status ...................................................................................................... 251
2.4.3 StarFire Satellite ID .............................................................................................................. 252
2.4.4 Start Type and Number of Satellites Visible ........................................................................ 252
2.4.5 Position Status and Number of Satellites Tracked .............................................................. 252
2.4.6 Almanac Available and Number of Satellite Blocks in This Message ................................. 252
2.4.8 Block per PRN ..................................................................................................................... 253
2.4.8.1 PRN ............................................................................................................................ 253
2.4.8.2 Constellation Type and Channel Block Count ........................................................... 253
2.4.8.3 Satellite azimuth and elevation ................................................................................... 253
2.4.9 Block per Channel ................................................................................................................ 253
2.4.9.1 Channel Number ......................................................................................................... 254
2.4.9.2 Code Type and Allocation Mode ................................................................................ 254
2.4.9.3 Tracking Status and Loop Bandwidth ......................................................................... 257
2.4.9.4 CNo ............................................................................................................................. 258
2.5 EPHEM1B ............................................................................................................................... 259
2.5.1 G PS Eph emeris ................................................................................................................... 259
2.5.2 GLONAS S Ep h emeris ......................................................................................................... 259
2.5.3 Galileo Ephemeris ................................................................................................................ 260
2.5.4 Beidou Ephemeris ................................................................................................................ 260
2.5.5 Q ZSS Ephemeris ................................................................................................................. 261
2.5.6 SBAS Ephemeris ................................................................................................................. 261
2.6 EVENTLATCHA ...................................................................................................................... 262
2.7 INPUTSFLICENSE ................................................................................................................. 263
2.8 MBRTK1B ............................................................................................................................... 264
2.8.2 MBRTK Navigation Status ................................................................................................... 265
2.10 MEAS1B (Version 2) ............................................................................................................... 266
2.10.1 Satellite Block ...................................................................................................................... 266
2.10.2 Signal Block ......................................................................................................................... 266
2.10.3 PRN Slot Number ................................................................................................................ 267
2.10.4 Frequency Number .............................................................................................................. 267
2.10.5 Code Type ........................................................................................................................... 268
2.10.6 Invalid Measurement Field ................................................................................................... 268
2.10.7 Bit Alignment ........................................................................................................................ 269
2.11 MSGCANCELCODESB .......................................................................................................... 270
2.12 MSGCANCELHISTORYB ....................................................................................................... 271
2.12.1 Number of Cancel Histories ................................................................................................. 271
2.12.2 License Issue Date .............................................................................................................. 271
2.12.3 License End Date ................................................................................................................. 271
2.12.4 Date of Cancellation ............................................................................................................. 271
2.12.5 Days Left (Unused Days) ..................................................................................................... 271
2.12.6 Cancel Reason .................................................................................................................... 272
2.12.7 Cancellation Source ............................................................................................................. 272
2.13 MSGPRODUCTINFO .............................................................................................................. 273
2.14 MSGVERSION ........................................................................................................................ 274
2.15 NAVCONFIG1B....................................................................................................................... 275
2.16 NCT5B ..................................................................................................................................... 277
2.17 NCT5C .................................................................................................................................... 278
2.18 NCT62 ..................................................................................................................................... 279
2.19 NCTBB .................................................................................................................................... 280
2.20 NCTBD and NCTBE ................................................................................................................ 281
2.21 NCTCB .................................................................................................................................... 282
2.23 NCTCD and NCTE .................................................................................................................. 283
2.25 NEWSFALMREADY ............................................................................................................... 284
2.27 NMEA Messages Overview .................................................................................................... 285
2.29 NMEAALM (ASCII) .................................................................................................................. 287
vii
Page 8

Onyx Technical Reference Manual Rev. A
2.30 NMEADTM .............................................................................................................................. 288
2.31 NMEAGBS .............................................................................................................................. 290
2.32 NMEAGFA ............................................................................................................................... 292
2.33 NMEAGGA .............................................................................................................................. 294
2.34 NMEAGLL ............................................................................................................................... 296
2.35 NMEAGNS .............................................................................................................................. 297
2.36 NMEAGRS (ASCII) ................................................................................................................. 299
2.37 NMEAGSA .............................................................................................................................. 301
2.38 NMEAGST (ASCII) .................................................................................................................. 302
2.39 NMEAGSV (ASCII) ................................................................................................................. 303
2.40 NMEAHDT ............................................................................................................................... 305
2.41 NMEAMLA ............................................................................................................................... 306
2.42 NMEARMC .............................................................................................................................. 307
2.43 NMEAROT (ASCII) ................................................................................................................. 309
2.44 NMEARRE (ASCII) ................................................................................................................. 310
2.45 NMEATTM ............................................................................................................................... 311
2.46 NMEAVTG ............................................................................................................................... 313
2.47 NMEAZDA ............................................................................................................................... 314
2.48 NMEAPNCTDTM .................................................................................................................... 315
2.49 NMEAPNCTGGA .................................................................................................................... 317
2.50 NMEAPNCTGST ..................................................................................................................... 320
2.51 NMEAPNCTMDE .................................................................................................................... 321
2.52 NMEAPNCTSET ..................................................................................................................... 322
2.53 NTRIPSTAT ............................................................................................................................ 323
2.54 PHASENAVSTATUS1B (Version 1) ....................................................................................... 324
2.55 PHASENAVSTATUS2B (Version 1) ....................................................................................... 326
2.56 PHASENAVSTATUS2B (Version 2) ....................................................................................... 327
2.57 POINTRADIUSDATAB ............................................................................................................ 328
2.58 POWERSTAT.......................................................................................................................... 329
2.58.1 Battery Pack ......................................................................................................................... 329
2.58.2 Battery Temperature Ranges .............................................................................................. 330
2.59 PSEUDORANGESTATSB ...................................................................................................... 331
2.60 PVT1B (Version 2) .................................................................................................................. 332
2.60.1 Navigation Solution Status ................................................................................................... 333
2.60.2 Latitude, Longitude, Height, and Geoid-Ellipsoid Sep arat ion .............................................. 334
2.60.3 Standard Deviations of Latitude, Longitude and Height ...................................................... 334
2.60.4 PDOP North, East, and Up .................................................................................................. 334
2.60.5 Velocity North, East, and Up ................................................................................................ 335
2.60.6 Number of Satellites Tracked .............................................................................................. 335
2.60.7 Navigation Solution Mode .................................................................................................... 335
2.60.8 Maximum dGPS Correction Age .......................................................................................... 337
2.60.9 dGPS Base Station ID ......................................................................................................... 337
2.60.10 Figure of Merit ...................................................................................................................... 337
2.60.11 Failure Code ........................................................................................................................ 337
2.60.12 Solid Earth Tides .................................................................................................................. 338
2.60.13 Bit Mask of GNSS Satellite Constellation Usage ................................................................. 338
2.60.14 Bit Mask of GNSS Satellites Used ....................................................................................... 339
2.60.15 Additional Navigation Solution Status .................................................................................. 339
2.61 PVT3B ..................................................................................................................................... 340
2.62 QUICKSTARTPOSA ............................................................................................................... 342
2.63 RADIOSTAT ............................................................................................................................ 343
2.64 RTKSTATUS1B (Version 1) .................................................................................................... 344
2.64.1 Bit mask of GNSS satellite constellation usage ................................................................... 345
2.65 SATSUSEDB (Binary) ............................................................................................................. 346
2.66 SDCARD ................................................................................................................................. 349
2.67 SELFSURVEYSTATUS1A ...................................................................................................... 351
2.68 SFLICENSEB .......................................................................................................................... 352
2.69 SFSATLIST1B (Binary) ........................................................................................................... 354
viii
Page 9

Onyx Technical Reference Manual Rev. A
2.70 SFSEARCHPOSB ................................................................................................................... 355
2.71 SFSTATUS1B ......................................................................................................................... 356
2.71.1 Current StarFire downlink beam indicator ........................................................................... 356
2.71.2 Current StarFire signal status .............................................................................................. 357
2.71.3 Current StarFire signal strength (Eb/NØ) ............................................................................ 357
2.71.4 Good packet counts (percentage) ....................................................................................... 357
2.71.5 Idle packet counts (percentage) .......................................................................................... 358
2.71.6 Re-synchronization counts................................................................................................... 358
2.71.7 StarFire Hub ID’s and license status ................................................................................... 358
2.71.8 External Hub ID .................................................................................................................... 358
2.72 STARFIREALM1B ................................................................................................................... 359
2.73 TXRXINFOA (ASCII) ............................................................................................................... 361
2.74 USERANTTYPEB ................................................................................................................... 365
3 Legacy Proprietary RTK Correction Messages ........................................................... 367
0x5b - RTK Correction Message - 4+12+(n *18) b ytes ......................................................................... 368
0x5c - RTK Base Position - 25 bytes ................................................................................................... 369
0x5e – RTK Base Raw Measurements - 4+12+(n*18) bytes ............................................................... 370
4 Other Correction Output and Input Message Types ................................................... 371
4.1 RTCM 2.3 Output Messages ................................................................................................... 371
4.2 RTCM 2.3 Input Messages ..................................................................................................... 371
4.3 RTCM 3.0 Output Messages ................................................................................................... 372
4.4 RTCM 3.0 Input Messages ..................................................................................................... 373
A CRC Function/Data Parsing and Decoding.................................................................. 374
Onyx Pseudocode Message Parser..................................................................................................... 375
Onyx Pseudocode for Coordinate Conversions ................................................................................... 378
B Software License Agreement ....................................................................................... 380
Software License Agreement for Deere & Company GNSS StarFire™ Receiver ............................... 380
C Logging Data to the SF-5050 SD Card ......................................................................... 385
SD CARD Formatting ........................................................................................................................... 385
SD Card Detection ............................................................................................................................... 386
Scheduling Messages & Logging Data ................................................................................................ 387
D Uploading Unified Firmware Files Using StarUtil 5000 ............................................... 390
E Base RTK Configuration ............................................................................................... 394
Overview .............................................................................................................................................. 394
Hardware Requirements ...................................................................................................................... 394
Hardware Configuration ....................................................................................................................... 395
Antenna Installation .............................................................................................................................. 396
Update Profile (with Ethernet Port Base Station and Radio Settings) ................................................. 396
Additional Information .......................................................................................................................... 400
Automatic Ethernet Connection ........................................................................................................ 400
[ETHVCOM] Syntax ..................................................................................................................... 400
[ETHVCOM] Examples ................................................................................................................ 402
ETHVCOM Application Notes ...................................................................................................... 402
Exercise ....................................................................................................................................... 403
Resetting the Ethernet V ir tual Com Connection .......................................................................... 403
F MBRTK Commands and Responses ............................................................................ 405
Setting Up the Moving Base Position ................................................................................................... 405
General Setup Commands ............................................................................................................... 406
MBRTK Output Streams ................................................................................................................... 407
MBRTK Port-Loading Requirement .................................................................................................. 407
G Loading Firmware Without StarUtil 5000 ..................................................................... 409
BOOTLOADA (ASCII) .......................................................................................................................... 409
BOOTLOADB (Binary) ......................................................................................................................... 410
Message General Format .................................................................................................................... 410
Function Type ................................................................................................................................... 410
Pass or Fail ....................................................................................................................................... 411
Valid Count ....................................................................................................................................... 411
ix
Page 10

Onyx Technical Reference Manual Rev. A
Address............................................................................................................................................. 411
Data 412
BootloadB SubID Message Format...................................................................................................... 412
SubID NB_PingCmd Message Format ............................................................................................. 412
SubID NB_PingRep Message Format .............................................................................................. 412
SubID NB_BaudCmd Message Format ........................................................................................... 413
SubID NB_BaudRep Message Format ............................................................................................ 413
SubID NB_SetupCmd Message Format .......................................................................................... 414
SubID NB_SetupRep Message Format ........................................................................................... 414
SubID NB_LoadDataCmd Message Format .................................................................................... 414
SubID NB_LoadDataRep Message Format ..................................................................................... 415
SubID NB_ ChkCrcCmd Message Format ....................................................................................... 415
SubID NB_ChkCrcRep Message Format ......................................................................................... 416
SubID NB_ProgCmd Message Format ............................................................................................ 416
SubID NB_EraseRep Message Format ........................................................................................... 417
SubID NB_WriteFRep Message Format .......................................................................................... 417
SubID NB_Working Message Format .............................................................................................. 417
SubID NB_ResetCmd Message Format .......................................................................................... 418
SubID NB_ResetRep Message Format ........................................................................................... 418
GNSS Software Loading Seque nce ................................................................................................. 419
H Web Server .................................................................................................................... 421
Supported Browsers ......................................................................................................................... 421
Storage Location .............................................................................................................................. 421
Account information .......................................................................................................................... 421
How to Access .................................................................................................................................. 422
How to Update .................................................................................................................................. 422
Limitations......................................................................................................................................... 422
Web and Ftp Commands .................................................................................................................. 422
x
Page 11

Onyx Technical Reference Manual Rev. A
List of Tables
Table 1: Basic Command Format Using Blanks as Delimiters ...................................................25
Table 2: Basic Command Format Using Commas as Delimiters ...............................................25
Table 3: Examples of Single Argument Command Inputs and Responses ................................26
Table 4: Examples of Multiple Argument Command Inputs and Responses ..............................27
Table 5: Data Type Abbreviations .............................................................................................28
Table 6: General Format of Onyx Binary Output Messages ......................................................28
Table 7: Standard Onyx Binary Header Format.........................................................................29
Table 8: Time Confidence Values .............................................................................................29
Table 9: Simplified Onyx Binary Header Format ........................................................................29
Table 10: Factory Default Output Proprietary Messages and Responses..................................31
Table 11: Supported Standard NMEA Messages ......................................................................34
Table 12: Supported Non-Standard NMEA Messages ..............................................................34
Table 13: ALM1B Binary message data ....................................................................................40
Table 14: BOOTLOADA Bootloader1 Actions ...........................................................................50
Table 15: BOOTLOADA Bootloader2 Actions ...........................................................................50
Table 16: Software Info Structure Definition ..............................................................................51
Table 17: BOOTLOADB Binary Message ..................................................................................52
Table 18: BOOTLOADB Message Function SubID Enum Definition .........................................53
Table 19: BOOTLOADB and BootloadPIOB Message Error Codes ..........................................54
Table 20: SubID NB_PingCmd Format .....................................................................................54
Table 21: Software Type Enum .................................................................................................55
Table 22: SubID NB_PingRep Format ......................................................................................55
Table 23: SubID NB_BaudCmd Format ....................................................................................56
Table 24: SubID NB_BaudRep Format .....................................................................................56
Table 25: SubID NB_SetupCmd Format ...................................................................................56
Table 26: SubID NB_SetupRep Format ....................................................................................57
Table 27: SubID NB_LoadDataCmd Format .............................................................................57
Table 28: SubID NB_ LoadDataRep Format .............................................................................58
Table 29: SubID NB_ChkCrcCmd Format .................................................................................58
Table 30: SubID NB_ChkCrcRep Format ..................................................................................59
Table 31: SubID NB_ProgCmd Format .....................................................................................59
Table 32: SubID NB_EraseRep Format ....................................................................................59
Table 33: SubID NB_WriteFRep Format ...................................................................................60
Table 34: SubID NB_Working Format .......................................................................................60
Table 35: SubID NB_ResetCmd Format ...................................................................................60
Table 36: SubID NB_ResetRep Format ....................................................................................61
Table 37: BOOTLOADPIOB Binary Message ...........................................................................63
Table 38: BOOTLOADB Message Function SubID Enum Definition .........................................64
Table 39: SubID NB_PingCmd Format .....................................................................................65
Table 40: SubID NB_PingRep Format ......................................................................................65
Table 41: SubID NB_BaudCmd Format ....................................................................................65
Table 42: SubID NB_BaudRep Format .....................................................................................66
Table 43: SubID NB_SetupCmd Format ...................................................................................66
Table 44: SubID NB_SetupRep Format ....................................................................................66
Table 45: SubID NB_LoadDataCmd Format .............................................................................67
Table 46: SubID NB_LoadDataRep Format ..............................................................................67
Table 47: SubID NB_ChkCrcCmd Format .................................................................................68
Table 488: SubID NB_ChkCrcRep Format ................................................................................68
Table 49: SubID NB_EraseRep Format ....................................................................................69
Table 50: SubID NB_WriteFRep Format ...................................................................................69
xi
Page 12

Onyx Technical Reference Manual Rev. A
Table 51: SubID NB_Working Format .......................................................................................69
Table 52: SubID NB_ResetCmd Format ...................................................................................70
Table 53: SubID NB_ResetRep Format ....................................................................................70
Table 54: [BTSET] Command Action Keywords (Subcommands) .............................................72
Table 55: Parameter List for User-Defined Datum .....................................................................80
Table 56: User-Defined Ellipsoid Model (with Sample Values) ..................................................81
Table 57: 3-Parameter Model Transformation (with Sample Values) .........................................81
Table 58: 7-Parameter Model Transformation (with Sample Values) .........................................82
Table 59: 14-Parameter Model Transformation (with Sample Values) .......................................82
Table 60: Dynamic Modes Keywords Description .....................................................................85
Table 61: Dynamic Modes Mapping and Applications ...............................................................86
Table 62: Default Settings for Unspecified Parameters .............................................................96
Table 63: GEOIDAL99 Header Format ................................................................................... 120
Table 64: GEOIDAL99 Data Format (variable length) ............................................................. 121
Table 65: Data Type for GNALM1B Message ......................................................................... 125
Table 66: Message Structure for GLONASS Satellites ............................................................ 125
Table 67: Message Structure for GPS Satellites ..................................................................... 126
Table 68: Signals and/or Frequencies Keywords for NAVMEASUSE Command ..................... 146
Table 69: NTRIP Client Status Messages ............................................................................... 148
Table 70: NTRIP Client Configuration Data ............................................................................. 151
Table 71: NTRIP Server Status Messages .............................................................................. 153
Table 72: Output Command Scheduling/Timing Methods ....................................................... 157
Table 73: Output Command Port Mnemonics ......................................................................... 158
Table 74: PackB Command Format ........................................................................................ 159
Table 75: PackB Command Format Field Mnemonics ............................................................. 159
Table 76: Power Modes .......................................................................................................... 167
Table 77: Code-Based dGPS Modes Controlled by the PRDGPSMODE Command ............... 168
Table 78: SF_Source Controlled by the PRDGPSMODE command (SF Only)........................ 168
Table 79: [PROFILE] Command Action Keywords .................................................................. 171
Table 80: RTK Modes ............................................................................................................. 182
Table 81: Rover Site ID Request ............................................................................................. 182
Table 82: Rover Site Station ID ............................................................................................... 183
Table 83: Base Station ID ....................................................................................................... 183
Table 84: RTK Multipath Environments ................................................................................... 186
Table 85: [SF QUICKSTART] Action Keywords ...................................................................... 201
Table 86: Shutdown Modes..................................................................................................... 203
Table 87: Signals and/or Frequencies Keywords for TRACKINGMODE Command ................ 212
Table 88: Binary Data Format ................................................................................................. 223
Table 89: VERSION Keywords for Software Components ...................................................... 224
Table 90: VERSION Command Response Format .................................................................. 225
Table 91: WEBLOADB Binary Message.................................................................................. 228
Table 92: WEBLOADB Message Function SubID Enum Definition ......................................... 229
Table 93: SubID WB_PingCmd Format ................................................................................... 230
Table 94: SubID WB_PingRep Format .................................................................................... 230
Table 95: SubID WB_SetupCmd Message Format ................................................................. 230
Table 96: SubID WB_SetupRep Format.................................................................................. 231
Table 97: SubID WB_LoadDataCmd Format .......................................................................... 231
Table 98: SubID WB_LoadDataRep Format ........................................................................... 231
Table 99: SubID WB_ChkCrcCmd Format .............................................................................. 231
Table 100: SubID WB_ChkCrcRep Message Format .............................................................. 232
Table 101: SubID WB_WriteCmd Format ................................................................................ 232
Table 102: SubID WB_WriteRep Format................................................................................. 233
Table 103: WEBLOADB message protocol ............................................................................. 233
xii
Page 13

Onyx Technical Reference Manual Rev. A
Table 104: PackB Wrapper Format ......................................................................................... 245
Table 105: Wrapped Base Modes ........................................................................................... 246
Table 106: Figure of Merit ....................................................................................................... 247
Table 107: ALM1B Binary Message Data ................................................................................ 248
Table 108: GPS ALM1B Binary Message Data ....................................................................... 248
Table 109: GLONASS ALM1B Binary Message Data.............................................................. 249
Table 110: SBAS ALM1B Binary Message Data ..................................................................... 249
Table 111: CHNLSTATUS1B Binary Message Data ............................................................... 251
Table 112: StarFire Tracking Status Values ............................................................................ 251
Table 113: CHNLSTATUS1B block per PRN .......................................................................... 252
Table 114: Start Type.............................................................................................................. 252
Table 115: Position Status ...................................................................................................... 252
Table 116: CHNLSTATUS1B Satellite Block, One per PRN .................................................... 253
Table 117: CHNLSTATUS1B Blocks per Channel .................................................................. 254
Table 118: Code Type ............................................................................................................. 254
Table 119: SBAS Code Type .................................................................................................. 255
Table 120: SBAS Code Type .................................................................................................. 256
Table 121: Allocation Mode ..................................................................................................... 257
Table 122: Channel Status Codes........................................................................................... 257
Table 123: Loop Bandwidth..................................................................................................... 258
Table 124: EPHEM1B Binary Message Header ...................................................................... 259
Table 125: GPS EPHEM1B Binary Message .......................................................................... 259
Table 126: GLONASS EPHEM1B Binary Message ................................................................. 259
Table 127: Bit Mapping of GLONASS String 1 ........................................................................ 260
Table 128: Galileo EPHEM1B Binary Message ....................................................................... 260
Table 129: Beidou EPHEM1B MEO and IGSO Binary Message ............................................. 260
Table 130: Beidou EPHEM1B GEO Binary Message .............................................................. 261
Table 131: QZSS EPHEM1B Binary Message ........................................................................ 261
Table 132: SBAS EPHEM1B Binary Message ........................................................................ 261
Table 133: Figure of Merit ....................................................................................................... 262
Table 134: MBRTK1B Binary Message Body .......................................................................... 264
Table 135: MBRTK Solution Mode .......................................................................................... 265
Table 136: Navigation Mode ................................................................................................... 265
Table 137: MEAS1B ............................................................................................................... 266
Table 138: Satellite Block ........................................................................................................ 266
Table 139: Signal Block .......................................................................................................... 266
Table 140: PRN Slot Number .................................................................................................. 267
Table 141: Frequency Number ................................................................................................ 267
Table 142: Code Type ............................................................................................................. 268
Table 143: MSGCANCELCODESB ......................................................................................... 270
Table 144: MSGCANCELHISTORYB Part 1 ........................................................................... 271
Table 145: MSGCANCELHISTORYB Part 2 ........................................................................... 271
Table 146: MSGCANCELHISTORYB Cancellation Source ..................................................... 272
Table 147: MSGVERSION Keywords for Software Components ............................................ 274
Table 148: NAVCONFIGB Data Fields .................................................................................... 275
Table 149: NEWSFALMREADY ASCII message data ............................................................ 284
Table 150: Supported Standard NMEA Message .................................................................... 285
Table 151: Supported Nonstandard NMEA Message .............................................................. 286
Table 152: ALM Message Output Format ................................................................................ 287
Table 153: DTM Message Output Format ............................................................................... 288
Table 154: DTM Message Output for Each Nav Mode ............................................................ 289
Table 155: GBS Message Output Format ............................................................................... 290
Table 156: GFA Message Output Format ................................................................................ 292
xiii
Page 14

Onyx Technical Reference Manual Rev. A
Table 157: GGA Message Format........................................................................................... 294
Table 158: GLL Message Output Format ................................................................................ 296
Table 159: GNS Message Output Format ............................................................................... 297
Table 160: GRS Message Output Format ............................................................................... 299
Table 161: GSA Message Output Format ............................................................................... 301
Table 162: GST Message Output Format ................................................................................ 302
Table 163: GSV Message Output Format ............................................................................... 303
Table 164: HDT Message Output Format ................................................................................ 305
Table 165: MLA Message Output Format ................................................................................ 306
Table 166: RMC Message Output Format ............................................................................... 307
Table 167: ROT Message Output Format ............................................................................... 309
Table 168: RRE Message Output Format ............................................................................... 310
Table 169: TTM Message Output Format ................................................................................ 311
Table 170: VTG Message Output Format ................................................................................ 313
Table 171: ZDA Message Output Format ................................................................................ 314
Table 172 PNCTDTM Message Output Format ....................................................................... 315
Table 173 PNCTDTM Message Output for Each Nav Mode.................................................... 316
Table 174: PNCTGGA Message Output Format ..................................................................... 317
Table 175: Beam Selection ID ................................................................................................. 318
Table 176: Navigation Mode ................................................................................................... 319
Table 177: PNCTGST Message Output Format ...................................................................... 320
Table 178: PNCTMDE Message Output Format ..................................................................... 321
Table 179: NCTSET Message Output Format ......................................................................... 322
Table 180: NTRIPSTAT Message Output Examples ............................................................... 323
Table 181: PHASENAVSTATUS1B Message Body ................................................................ 324
Table 182: PHASENAVSTATUS1B Satellite Block ................................................................. 325
Table 183: POINTRADIUSDATAB .......................................................................................... 328
Table 184: POWERSTAT ....................................................................................................... 329
Table 185: Charge Start And Battery Operation Voltages ....................................................... 329
Table 186: PSEUDORANGESTATSB Binary Message Data .................................................. 331
Table 187: PVT1B Version Size Differences ........................................................................... 332
Table 188: PVT1B Binary Message ........................................................................................ 332
Table 189: Navigation Solution Status .................................................................................... 333
Table 190: Navigation Mode and Source Type Fields ............................................................. 335
Table 191: Navigation Solution Mode ...................................................................................... 336
Table 192: dGPS Source Type ............................................................................................... 336
Table 193: RTK Source Type .................................................................................................. 337
Table 194: Failure Code .......................................................................................................... 338
Table 195: GNSS Satellite Constellation Usage Bit Mask ....................................................... 339
Table 196: Additional Navigation Solution Status .................................................................... 339
Table 197: PVT3B Message ................................................................................................... 340
Table 198: QUICKSTART Position.......................................................................................... 342
Table 199: RADIOSTAT Message .......................................................................................... 343
Table 200: RTKSTATUS1B contents ...................................................................................... 344
Table 201: Bit mask of GNSS satellite constellation ................................................................ 345
Table 202: RTK Search Flag ................................................................................................... 345
Table 203: SATSUSEDB Binary Message Data ...................................................................... 346
Table 204: Failure Conditions ................................................................................................. 346
Table 205: SDCARD Output Messages for the ....................................................................... 349
Table 206: SD FLASH Output Messages for the SF-5050 ...................................................... 349
Table 207: SELFSURVEYSTATUS1A Message Output Format ............................................. 351
Table 208: SFLICENSEB Binary Message Body ..................................................................... 352
Table 209: Net Authorization ................................................................................................... 352
xiv
Page 15

Onyx Technical Reference Manual Rev. A
Table 210: Status .................................................................................................................... 353
Table 211: SFSATLIST1B Binary Message Data .................................................................... 354
Table 212: StarFire Satellite Block .......................................................................................... 354
Table 213: SFSTATUS1B Binary Message Data .................................................................... 356
Table 214: StarFire Beam Indicator ......................................................................................... 357
Table 215: StarFire Tracking Status ........................................................................................ 357
Table 216: STARFIREALM1B binary message data ............................................................... 359
Table 217: OTA Almanac Satellite Record .............................................................................. 360
Table 218: TXRXINFOA Message Output Format – SF-5050 ................................................. 361
Table 219: USERANTTYPE0B Content .................................................................................. 365
Table 220: NavCom Proprietary Correction Output Streams ................................................... 367
Table 221: Supported NavCom Proprietary Correction Inputs ................................................. 367
Table 222: RTCM 2.3 Correction Output Streams ................................................................... 371
Table 223: Supported RTCM Correction Inputs ....................................................................... 371
Table 224: RTCM 3.0 Correction Output Streams ................................................................... 372
Table 225: Supported RTCM 3.0 Correction Inputs ................................................................. 373
Table 226: Acceptable Cable Lengths ..................................................................................... 396
Table 227: Base Modes .......................................................................................................... 405
Table 228: Port-Loading Requirements ................................................................................... 407
Table 229: BOOTLOADA Bootloader1 Actions ....................................................................... 409
Table 230: BOOTLOADA Bootloader2 Actions ....................................................................... 409
Table 231: BOOTLOADB Binary Message .............................................................................. 410
Table 232: BOOTLOADB Message Function SubID Enum Definition ..................................... 410
Table 233: BOOTLOADB Message Error Codes ..................................................................... 411
Table 234: SubID NB_PingCmd Format.................................................................................. 412
Table 235: Software Type Enum ............................................................................................. 412
Table 236: SubID NB_PingRep Format .................................................................................. 412
Table 237: SubID NB_BaudCmd Format ................................................................................ 413
Table 238: SubID NB_BaudRep Format ................................................................................. 413
Table 239: SubID NB_SetupCmd Format ............................................................................... 414
Table 240: SubID NB_SetupRep Format ................................................................................ 414
Table 241: SubID NB_LoadDataCmd Format ......................................................................... 414
Table 242: SubID NB_LoadDataRep Format .......................................................................... 415
Table 243: SubID NB_ChkCrcCmd Format ............................................................................. 415
Table 244: SubID NB_ChkCrcRep Format .............................................................................. 416
Table 245: SubID NB_ProgCmd Format ................................................................................. 416
Table 246: SubID NB_EraseRep Format ................................................................................ 417
Table 247: SubID NB_WriteFRep Format ............................................................................... 417
Table 248: SubID NB_Working Format ................................................................................... 418
Table 249: SubID NB_ResetCmd Format ............................................................................... 418
Table 250: SubID NB_ResetRep Format ................................................................................ 418
xv
Page 16

Onyx Technical Reference Manual Rev. A
List of Figures
Figure 1: Antennae Alignment – Lateral and Longitudinal .........................................................41
Figure 2: Example of StarFire License File Contents............................................................... 129
Figure 3: Example of Software Option File Contents ............................................................... 130
Figure 4: OTA StarFire Almanac Satellite Record ................................................................... 359
Figure 5: Input Terminal – Creating Logging File ..................................................................... 387
Figure 6: Receiver Options Tab .............................................................................................. 390
Figure 7: File Upload ............................................................................................................... 391
Figure 8: Firmware Update List ............................................................................................... 391
Figure 9: Finished All Downline Loads .................................................................................... 392
Figure 10: Typical RTK Base Installation................................................................................. 395
Figure 11: View/Edit Profile Button .......................................................................................... 398
Figure 12: Network Base – Sample.npt Upload ....................................................................... 399
Figure 13: Input Terminal ........................................................................................................ 403
xvi
Page 17

Onyx Technical Reference Manual Rev. A
Notices
Onyx Technical Reference Manual
96-312008-3001
Revision A
December 2018
Copyright
2018 by Deere & Company
All rights reserved. No part of this work or the computer program(s) described herein may be
reproduced, stored, or transmitted by any means, without the expressed written consent of the
copyright holders. Translation in any language is prohibited without the expressed written
consent of the copyright holders.
NavCom and Deere & Company Relationship
Deere & Company acquired NavCom in 1999. Thereafter, Deere & Company retained the
NavCom brand to continue offering NavCom’s products and services to non-agriculture
markets, while simultaneously developing new products and services designed for Deere’s
agriculture specific markets. Deere & Company retains legal and financial responsibility for the
NavCom brand. References in this document to NavCom, refer to the brand under which
products and services are offered by Deere & Company to non-agricultural mar kets. Deere &
Company is used where reference to ultimate legal ownership and responsibility is required.
Trademarks
‘find your way’, ‘NavCom Globe’ and ‘NAVCOM TECHNOLOGY’ logos are trademarks of Deere
& Company. StarFire™ is a registered trademark of Deere & Company. All other product and
brand names are trademarks or registered trademarks of their respective holders.
The Bluetooth
and any use of such marks by Deere & Company is under license. Other trademarks and trade
names are those of their respective owners.
®
word mark and logos are registered trademarks owned by Bluetooth Sig, Inc.
User Notice
Deere & Company shall not be responsible for any inaccuracies, errors, or omissions in
information contained herein, including, but not limited to, information obtained from third party
sources, such as publications of other companies, the press, or competitive data organizations.
This publication is made available on an “as is” basis and Deere & Company specifically
disclaims all associated warranties, whether express or implied. In no event will Deere &
Company be liable for direct, indirect, special, incidental, or consequential damages in
connection with the use of or reliance on the material contained in this publication, even if
advised of the possibility of such damages. Deere & Company reserves the right to make
improvements or changes to this publication and the products and services herein described at
any time, without notice or obligation.
As used in this publication, “Solstice” refers to the project name of the SF-5050.
Software License Agreement
By powering on and using this GNSS StarFire™ Receiver, you agree to the terms and
conditions of the Deere & Company GNSS Receiver Software License and Open Source
17
Page 18

Onyx Technical Reference Manual Rev. A
Software Licenses. The complete terms and conditions of these software licenses may be found
in the Onyx Technical Reference Manual Appendix B.
18
Page 19
Revision Histor y
Onyx Technical Reference Manual Rev. A
Draft Rev A (Dec 2018)
WEBUSERS Updated command description
15.5W Satellite Removed the satellite from Tables 175 and 214
Draft Rev A (Nov 2018)
LOGFILEDRIVEFULLSEL Command added
Draft Rev A (Sep 2018)
Draft Rev A (Aug 2018)
FSDIR Removed Drive B; Added Drive C
FSDRIVE Removed Drive B
FSFORMAT Removed Drive B
FSLOAD Removed Drive B
FSSPACE Removed Drive B
FTPCONTROL Removed Drive B
LOGFILEDRIVE Removed Drive B
SFLICENSEB Added COM3 and COM4 to the source table
MSGCANCELHISTORYB Added COM3 and COM4 to the source table
ENABLEGEOFENCE Updated description
Draft Rev A (Jul 2018)
SFLICENSEB Updated “Status” table
MSGCANCELHISTORYB Updated “MSGCANCELHISTORYB Cancellation Source” table
SFSTATUS1B Added field ‘External Hub ID’
ENABLEGEOFENCE Added command
Draft Rev A (Jun 2018)
REFSTNPOS Replaced “Hieght over Mean Sea Level” with “Height over Ellipsoid”
SETPOSITION Replaced “Hieght over Mean Sea Level” with “Height over Ellipsoid”
WEBCONTROL
1PPS Updated command width range.
NTRIPSTAT Updated message format to be comma-delimited after “TOW”.
Appendix H Added Appendix H - Web Server
Draft Rev A (May 2018)
POINTRADIUSDATAB Updated message structure
LOGFILENAME Changed file logging naming conventio n
Draft Rev A (May 2018)
ERASEEPH Updated keyword and description
Draft Rev A (Apr 2018)
STARFIREMODE Added note with regard to single frequency operation (fallback scenario)
3RDPARTYRTKX Added note with regard to StarFire signaling support
Initial release; specifically relates to ICD, version 5.01, Firmware version 1.0.2
Initial release; specifically relates to ICD, version 4.98, Firmware version 1.0.0
Initial release; specifically relates to ICD, version 4.90, Firmware version 0.1.7
Initial release; specifically relates to ICD, version 4.89, Firmware version 0.1.6
Initial release; specifically relates to ICD, version 4.80, Firmware version 0.1.5
Initial release; specifically relates to ICD, version 4.70, Firmware version 0.1.4
Updated to indicate that changes made using [WEBCONTROL] have to made using a
local port (serial or USB)
Initial release; specifically relates to ICD, version 4.63, Firmware version 0.1.3
Initial release; specifically relates to ICD, version 4.58, Firmware version 0.1.2
Initial release; specifically relates to ICD, version 4.56, Firmware version 0.1.1
19
Page 20

Onyx Technical Reference Manual Rev. A
TXRXINFOA Updated f73 – f76 to Reserved
Draft Rev A (Feb 2018)
PRDGPSMODE Added note with regard [3RDPARTYRTKX] setting
STARFIREMODE Added note with regard [3RDPARTYRTKX] setting
NCTBB Added note with regard [3RDPARTYRTKX] setting
NCTCB Added note with regard [3RDPARTYRTKX] setting
NavCom Technology, Inc.
Bluetooth® Added appropriate trade mar k r eferences
ANTENNAOFFSET Command removed
Draft Rev A (Jan 2018)
BOOTLOADB Updated GNSS Software Loading Sequence
PASSTHRU Update examples and Warning
ANTPOWER Updated command description and description
Draft Rev A (Nov 2017)
LOGFILEDRIVE Updated to include definition of device types.
SFSTATUS1B Updated Hub Id information
WEBLOADB Updated Webpages Limits
Draft Rev A (Oct 2017)
Appendix F Updated Appendix F - MBRTK
SELFSURVEYSTATUS1A Rewrote the command to accommodate DDMMSS… format
OUTPUT Removed web ports as valid port IDs from Table 73
WEBLOADB Changes the valid count data type from U16 to U32
TRACKINGMODE Updated definition for ALL keyword
QUICKSTARTPOSA Added SF-Start-Status keyword and definition
EVENTLATCHVOLTSEL Added command
DNSOVERRIDE Added comma nd
Draft Rev A (Sep 2017)
BOOTLOADB Updated Table 21: Software Type Enum
Draft Rev A (Aug 2017)
ANTREMOTE Added examples
BTSET Added maximum length definition
SFSTATUS1B Updated Hub ID’s and StarFire license status
TXRXINFO Replaced Octagon with SF-3040
Draft Rev A (July 2017)
ALM1B Updated for Galileo, Beidou, QZSS
EPHEM1B Updated for Galileo, Beidou, QZSS
MEAS1B Added E5AltBOC to Table 141: Frequency Number and Table 142: Code Type
SFCORRSELECT Added command
STARFIREALTSAT Added ‘Auto’ keyword definition and examples
Initial release; specifically relates to ICD, version 4.52, Firmware version 0.1.0
Updated appropriate references to Deere & Company
Initial release; specifically relates to ICD, version 4.49, Firmware version 0.0.0.26
Initial release; specifically relates to ICD, version 4.39, Firmware version 0.0.0.25
Initial release; specifically relates to ICD, version 4.30, Firmware version 0.0.0.24
Initial release; specifically relates to ICD, version 4.19, Firmware version 0.0.0.23
Initial release; specifically relates to ICD, version 4.16, Firmware version 0.0.0.22
Initial release; specifically relates to ICD, version 4.09, Firmware version 0.0.0.21
20
Page 21

Onyx Technical Reference Manual Rev. A
TRACKINGMODE Significantly Updated argument table, notes and examples
TXRXINFOA Updated port table
WIFICLIENT Updated Note 1
Draft Rev A (June 2017)
LEDTEST Remove [LEDTEST] from manual
PVT1B Add StarFire LP to line 9 Table: 188 Navigation Solution Mode
RTKTIMEOUT Change “Integer” to “Float” in time field
RTKMODE
SHUTDOWN Added table showing interaction with other system elements
GEOIDALMODEL Removed EGM2008
FIXBASELINE Clarified parameter input requirements
TRACKINGMODE Updated GLONASS notes
USBMODE Updated description for Options
SELFSURVEY Updated notes
WEBLOAD Updated Table 92: WEBLOADB Message Function SubID Enum Definition
MEAS1B Updated Table 137: PRN Slot Number
CHNLSTATUS1B
OUTPUT Table 73: Added note for USB2 port
Draft Rev A (March 2017)
Initial release; specifically relates to ICD, version 4.00, Firmware version 0.0.0.19
Update Base62 Keyword to BaseNCT62 in Table 81: RTK Modes
Added note for USB2 port
Updated to reflect only Version 3 implementation – primarily section s 2.4.3, 2.4. 7.1, and
2.4.8.2; Removed Versio ns 1 and 2
Initial release; specifically relates to ICD, version 3.76, Firmware version 0.0.0.16
21
Page 22
Onyx Technical Reference Manual Rev. A
Use of This Document
This User Guide is intended to be used by someone familiar with the concepts of GNSS and
satellite surveying equipment.
Note indicates additional information to make better use of the product.
T his symbol means Reader Be Careful. Indicates a caution, care, and/or safety
situation. The user might do something that could result in equipment damage or
loss of data.
T his symbol means Danger. The user is in a situation that could cause bodily
injury. Before starting work on any equipment, be aware of the hazards involved
with electrical and RF circuitry and be familiar with standard practices for
preventing accidents.
This symbol means Default. Unless otherwise set, these are the factory preset
parameters.
Revisions to this User Guide can be obtained in a digital format from
http://www.navcomtech.com/Support/DownloadCenter.cfm?category=manuals
Related Documents
Onyx Integration Guide P/N 96-310041-3001
Describes the operation and use of NavCom’s Onyx GNSS/StarFire receivers
StarUtil 5000 User Guide P/N 96-310029-3001
Describes the operation and use of NavCom’s Windows based control program (included on
CD)
RINEXUtil User Guide P/N 96-310021-2101
Describes the conversion program used on NavCom proprietary output data message formats
to RINEX ver 2.10 observation and navigation files (for customer programming purposes;
included on CD
Technical Reference M anual P/N 96-312008-3001
Describes the control and output data message formats utilized by the NavCom legacy Starlight
receivers.
NavCom Release Notes
Describes software updates for NavCom products. Current and archived Release Notes are
available on the NavCom web site:
http://www.navcomtech.com/Support/DownloadCenter.cfm?category=releasenotes
22
.
Page 23

Onyx Technical Reference Manual Rev. A
NavCom Customer Support provides software updates described in the Release Notes. Submit
a request for software updates via the Request Support web page.
Related Standards
ICD-GPS-200
NAVSTAR GPS Space Segment / Navigation User Interfaces Standard. ARINC Research
Corporation; 2250 E. Imperial Highway; El Segundo, California 90245
RTCM-SC-104
Recommended Standards For Differential GNSS Service. Radio Technical Commission For
Maritime Services; 1800 N. Kent St, Suite 1060; Arlington, Virginia 22209
CMR, CMR+
Compact Measurement Record; Trimble Navigation Limited; 935 Stewart Drive; Sunnyvale, CA
94085
NMEA-0183
National Marine Electronics Association Standard For Interfacing Marine Electronic Devices.
NMEA National Office; 7 Riggs Avenue; Severna Park, Maryland 21146
QZSS
Quasi Zenith Satellite System. Japan Aerospace Exploration Agency (JAXA). 7-44-1 Jindaiji
Higashi-mac hi, Chofu-shi, Tokyo 182-8522
Publicly Operated SBAS Signals
RTCA/DO-229D
The Radio Technical Commission for Aeronautics (RTCA) develops consensus-based
recommendations regarding communications, navigation, surveillance, and air traffic
management (CNS/ATM) system issues.
RTCA. 1828 L Street, NW, Suite 805, Washington, DC 20036
These organizations implement the RTCA/DO-229D standard set by RTCA:
WAAS (W ide Area Augmentation System)
U.S. Department of Transportation. Federal Aviation Administration. 800 Independence Ave,
SW, Washington, D C 2059
EGNOS (European Geostationary Navigation Overlay Servi ce)
European Space Agency. 8, 10 rue Mario-Nikis, F-75738 Paris Cedex 15, France
MSAS (MTSAT Satellite-based Augmentation System)
Japan Civil Aviation Bureau. Ministry of Transport, Kasumigaseki 2-1-3, Chiyoda-ku, Tokyo 100,
Japan
GAGAN (GPS Aided Geo Augmented Navigation)
Indian Space Research Organization. Antariksh Bhavan, New Bel Road, Bangalore 560 094,
India
23
Page 24

Onyx Technical Reference Manual Rev. A
Fundamental Onyx Message Block Formats
Message Application
This document describes the formats and protocols that are applicable to all of the Onyx
receiver’s physical ports (RS-232, RS-422, USB, Ethernet) at the application layer.
Refer to these sections for basic format information:
Onyx ASCII Input Commands
Onyx Output Messages
Refer to these sections for detailed format information. (The commands and output streams are
provided in alphabetical order according to their identifying mnemonics. Each command and
output stream is provided in a table with definitions of each parameter.)
Onyx Input Commands Detailed Formats
Error! Reference source not found.
Software Ensemble
This manual specifically relates to the software ensemble version detailed in the most recent
Revision History.
Message Query
Each message block may be queried by the command [Error! Reference source not found.]
mnemonic, ONCE
For example, [OUTPUT] MSGVERSION, ONCE queries the receiver to provide a one-time
output of the version number of the navigation firmware component.
Refer to section 1.95 Error! Reference source not found. in this manual for more
information about the OUTPUT command.
Onyx ASCII Input Commands
ASCII input commands are used to set parameters which control the operation of the Onyx
GNSS receiver. There are ASCII input commands to set navigation control parameters (DOP
limits, elevation masks, etc.), to enable and disable various navigation modes, to configure the
data ports, to turn on output streams, and to control numerous other receiver functions.
ASCII Message Organization
The basic format of Onyx ASCII input commands include a command mnemonic, framed by
square brackets, followed by one or more arguments, which specify the new values of the
control parameters. If there is more than one argument associated with a mnemonic, the
argument values may be separated by commas or by one or more blanks. Input commands are
terminated by a new line sequence (<CR><LF> = carriage return + line feed).
24
Page 25
Onyx Technical Reference Manual Rev. A
Table 1 and Table 2 show t he basic format for Onyx input commands.
Table 1: Basic Command Format Using Blanks as Delimiters
Command:
Table 2: Basic Command Format Using Commas as Delimiters
Command:
When command responses are enabled, the Onyx GNSS receiver issues a response to each
ASCII input command. The response is output on the data port on which the command was
received.
If the command is successfully parsed and accepted, the response characters are [OK]
followed by the command mnemonic.
If the command does not parse successfully and is not accepted, the response characters
are [??] followed by the command mnemonic, and, in some cases, an indication of which
argument caused the command not to be accepted.
[command mnemonic] arg1 arg2 … argN<CR><LF>
[command mnemonic] arg1,arg2,…,argN<CR><LF>
Refer to the section below, Examples of ASCII Input Commands and Responses.
When command responses are enabled, the receiver is in verbose mode.
ASCII Input Command Parsing Rules
These sections describe the detailed parsing rules for the ASCII input command fields.
Command Mnemonic Parsing
Command mnemonics identify which control parameter or group of control parameters are
specified in the argument values. The entire command mnemonic must be enclosed in a
beginning square bracket ( [ ) and an ending square bracket ( ] ). Within the brackets, the
command mnemonic is not case sensitive, and any number of blanks may be used to improve
legibility.
If an invalid command mnemonic is issued, the response characters will be [??] followed by the
message “Unrecognized command mnemonic”.
Argum ent String Parsing
The argument string fields can be delimited by any number of blanks or by single commas.
When null fields are needed (no argument value provided), commas must be used to indicate
them. The argument string (and the entire command sentence) is terminated with a new line
sequence (<CR><LF> = carriage return + line feed).
There are four types of arguments for Onyx ASCII input commands:
1. Integers: Dec imal integers containing only the characters 0 to 9 and + or –
2. Float: Floating point numbers containing only the characters 0 to 9 and + or – and,
optionally, the decimal point “.”
3. Keywords: ASCII strings that must match a predefined list of options for each command
These are case insensitive, but cannot contain embedded blanks. An example of a
keyword argument is the parity specification for a serial port, which is either NONE,
ODD, or EVEN.
25
Page 26

Onyx Technical Reference Manual Rev. A
4. Strings: String arguments must be enclosed in quotes (“”). Within the quotes, all ASCII
characters are permissible, including commas. String arguments are intended to support
user defined names and messages that require the use of some punctuation or special
characters.
When a valid command mnemonic is received and the argument string is absent,
the receiver responds with a one-time output of the stored values for the command
parameters.
Optional CRC Field (*CRC)
An optional CRC field can be appended to input commands. This supports interfaces with
external controllers (e.g., laptops, PDAs with wireless connectivity) with application software that
computes and appends the CRC field to provide additional integrity.
The CRC field is expressed as a sequence of four hex-ASCII digits, preceded by an asterisk
(*CRC). The four hex-ASCII digits represent the binary value of a 16-bit CCITT cyclic
redundancy check computed by the C-language function shown in Appendix A
Parser Pseudocode
.
The C-language Onyx parser pseudocode is shown in Appendix A
.
Examples of ASCII Input Commands and Responses
Table 3 shows examples of a basic single-argument command. The example uses the
[NAVELEVMASK] command to set the elevation mask, in degrees, for the main, code-based
navigation solution.
Table 3: Examples of Single Argument Command Inputs and Responses
Input Response* Description
[NAVELEVMASK] 7.5<CR><LF> [OK] NAVELEVMASK<CR><LF> Command accepted
Command accepted. (Note
[Nav Elev Mask] 9<CR><LF> [OK] NAVELEVMASK<CR><LF>
[NAVELEVMASK] -7<CR><LF>
[NAVELEVMASK] <CR><LF> [NAVELEVMASK] 9.00<CR><LF>
[??] NAVELEVMASK,argument #1
out of range<CR><LF>
the free use of spaces and
upper/lower case in the
command mnemonic.)
Command not accepted.
Problem with argument.
No arguments specified so
receiver reports current
value(s).
*Command responses must be enabled to receive responses (verbose mode).
<CR><LF> = carriage return + line feed
Table 4 shows examples of a command that accepts multiple arguments. If an argument is not
specified, the value is assumed to be the current set value. The command in these examples is
the [PORT] command, which is used to configure the RS-232 serial ports, and the RS-422 serial
port if available, of the Onyx receiver.
26
Page 27

Onyx Technical Reference Manual Rev. A
[PORT] accepts up to five arguments:
1. The port identifier: An integer from 1 to 4. If this argument is not specified, the port is
assumed to be the one receiving the command.
2. The baud rate (1200,2400,4800,9600,19200,38400,57600,115200)
3. The number of data bits per frame (7 or 8)
4. The number of stop bits per frame (1 or 2)
5. The parity option for each frame (NONE, ODD, EVEN)
Table 4: Examples of Multiple Argument Command Inputs and Responses
Input Response* Description
[PORT] 1,19200<CR><LF> [OK] PORT<CR><LF>
[PORT] 1,19200,,,NONE<CR><LF> [OK] PORT<CR><LF>
[PORT] 1 4800 8 1
NONE<CR><LF>
[PORT] 2,9600,9<CR><LF>
[PORT]<CR><LF>
[PORT] 2<CR><LF>
[OK] PORT<CR><LF>
[??] PORT,argument #3 out of
range<CR><LF>
[PORT]
1,4800,8,1,NONE<CR><LF>
[PORT]
2,9600,9,1,NONE<CR><LF>
Command accepted. Last 3
arguments left off.
Command accepted.
Arguments 3 and 4 not
specified as indicated by
commas.
Command accepted. (Note
use of spaces as argument
delimiters.)
Command not accepted.
Problem with third argument.
No arguments specified so
receiver reports current
value(s) for port receiving
command.
Only port argument specified
so receiver reports current
value(s) for specified port.
* Command responses must be enabled to receive responses (verbose mode).
<CR><LF> = carriage return + line feed
Onyx Output Messages
The Onyx GNSS receiver supports a number of different types of output messages (data output
streams). Some of these are industry standard outputs such as NMEA-0183 sentences and
various RTK/dGPS correction formats (RTCM, CMR, etc.). This section, however, describes the
format of specialized Onyx output messages designed to provide access to commonly used
internal receiver data (measurements, ephemeris, channel status, etc.), as well as efficient, low
latency outputs of the navigation results.
27
Page 28

Onyx Technical Reference Manual Rev. A
Onyx output messages are ASCII or binary. Not all binary output messages have an ASCII
equivalent and vice versa.
Both ASCII and binary Onyx output messages share these format elements in common:
Both begin with a unique, identifying ASCII mnemonic enclosed in square brackets.
The last letter of the mnemonic is the character ‘A’ for ASCII records or ‘B’ for binary
records.
Both are terminated with a CRC and a new line sequence (<CR><LF> = carri age return +
line feed). The CRC has a format identical to the optional CRC used for ASCII input
messages, i.e., four hex-ASCII characters preceded by an asterisk (*CRC).
Binary Output Message Organization
Onyx binary output messages use C-language structure definitions to describe the details of
their formats. Table 5 lists the data type abbreviations used.
Table 5: Data Type Abbreviations
Data Type # of bytes C-Language Definition
U08 1 unsigned char
S08 1 signed char
Bool 1 unsigned char
U16 2 unsigned short
S16 2 signed short
U32 4 unsigned long
S32 4 signed long
R32 4 float
R64 8 double
Table 6 shows the general format of Onyx binary out put messages.
Table 6: General Format of Onyx Binary Output Messages
[mnemonic] …… binary header …… binary message body …… *CRC<CR><LF>
Unique record
identifier. ASCII ending
in ‘B’ enclosed in
brackets
Standard binary header
described in Table 7, or
simplified binary header
described in Table 9.
Binary message body
unique for each record
identifier.
CRC followed by
carriage return + line
feed
The majority of the Onyx binary messages use the standard binary message header. The
simplified binary header is used only in some special cases; e.g., bootloading. The Onyx binary
messages described in this manual use the standard binary header unless otherwise indicated.
The CRC includes all of the fields in the binary header (9 bytes) and the binary message body
(variable number of bytes). The CRC is expressed as a sequence of four hex-ASCII digits,
preceded by an asterisk. The four hex-ASCII digits represent the binary value of a 16-bit CCITT
cyclic redundancy check computed by the C-language function shown in Appendix A
.
28
Page 29

Onyx Technical Reference Manual Rev. A
Table 7: Standard Onyx Binary Header Format
Field # Bits Data Type Description
Number of bytes in the binary header plus the data block,
Length 16 U16
GPS Week 16 U16 GPS week number
GPS time 32 U32 GPS time (milliseconds into the week)
i.e. data block length plus 9 bytes for the length of the
binary header
Time Confidence 4LSB
U08
Version 4MSB Message version control
Receiver time confidence (refer to Table 8)
Table 8: Time Confidence Values
Code Description
0 Time is unknown
1 Time has been set from the real time clock
2 Time has been set from the serial port
3 Time has been obtained from a satellite
4 Time has been obtained from a navigation solution
5 Time has been obtained from a stable navigation solution
Table 9: Simplified Onyx Binary Header Format
Field # Bits Data Type Description
Length 16 U16
Number of bytes in the binary header plus the data block; i.e.,
data block length plus 2 bytes for the length of this header
Output Rate Description
Output commands also support an output rate parameter, as described in the following list.
• OnTime, which tells the receiver to output the message each time it enters a new
interval. This interval is defined in units of seconds, with a range from 0.01 to 9999.9
seconds. The receiver truncates this value to the nearest 0.01 seconds. The default
interval is 1 second if not specified.
• OnChange, which means something more like “On Trigger”. For this keyword, the
receiver will schedule a message for output when something is ready to be displayed,
but this may or may not mean the data has really changed since the last time it was
displayed. It means more like, “display the current contents of the specified data
elements”.
• OnEvent, which is supported by the message, but does not appear at this time to do
anything.
• Once, which means to output the message right now, and exactly one time.
• Off, which means to stop sending the message
29
Page 30

Onyx Technical Reference Manual Rev. A
Input Parameter Formats
I Integer
H Hex number
F Floating point number
K Keyword, case insensitive
S String – input must be delimited by double quote marks, Cannot be NULL
Z String – input must be delimited by double quote marks, Can be NULL
Command Types
One Time One time command, not stored in NVRAM
User Stored in NVRAM with the PROFILE command
System Stored in NVRAM as soon as entered
Factory Stored in NVRAM, cannot be changed once entered
Message Updates & Software Revisions
From time to time it may be necessary for NavCom to change the format of an existing
message. This is normally accomplished by appending to the existing message (which will be
defined in a later version of this manual). Programmers should design software to be forward
compatible by recognizing that messages may be extended and the content of the extension
may be unknown to the user. In this circumstance, the message length will increase. Do not
reject the data record if the message length and checksum are valid for any given record. Allow
the program to ignore “undefined data” to ensure forward compatibility.
30
Page 31

Factory Default Profile
Table 10: Factory Default Output Proprietary Messages and Responses
Output on Ports COM1 and USB1
Message Rate Description
ALM1B On Change Almanac
Onyx Technical Reference Manual Rev. A
CHNLSTATUS1B On Time, 1Hz
EPHEM1B On Change Ephemeris
MEAS1B On Time, 1Hz Raw Measurement Data
MSGPRODUCTINFO On Time, 600 Sec
MSGVERSION On Time, 600 Sec Firmware Identificat ion B lo ck
PVT1B On Time, 1Hz Position, Velocity, and Time (PVT) Solution
PANICA On Change Factory Use
Output on All Ports
Message Rate Description
OK (command mnemonic) On Change
?? (command mnemonic) On Change
PANICA On Change Factory Use
ASIC & StarFire Channel Status
Product Type, Digital Serial Number, and System
Revision Number
Ack (“Acknowledged”). Ack indicates a successful
operation.
Nak (“Not Acknowledged”). NAK indicates a failure
in executing a command.
The messages are fully defined in sections 1 Onyx Input Commands Detailed
Formats
Several different navigation solutions may be computed at a 1 Hz rate. Refer to Section
2.60, PVT1B, for detailed information. The navigation rate sets the measurement rate.
The maximum PVT outpu t rate is 100Hz. The maximum raw data output rate is 100Hz.
These settings indicate:
• On Change: The receiver outputs the specified message at the highest rate the
system can output. The rate must be purchased. For example, if the receiver has a
purchased rate of 25 Hz, the messages set at On Change are output at 25 Hz.
• On Time: The receiver outputs the specified message at a rate ≤ the purchased rate.
For example, if the receiver has a purchased rate of 25 Hz, a message may be set at
a lower output rate, such as On Time, 0.1 (10 Hz).
In the supplied utility, StarUtil 5000, the Navigation Rate setting sets the output of
the NCT Binary message PVT1B and the NMEA messages GGA, RMC and VTG,
provided that those messages are set to On Change.
The NCT Binary message MEAS1B does not follow the navigation rate. To match a higher
navigation rate, the user must schedule the output of MEAS1B. The rate must be a
purchased navigation and raw data rate.
31
Page 32

Onyx Technical Reference Manual Rev. A
Profile Functionality
The Onyx receiver provides for storage of up to 20 user profiles in its non-volatile memory. The
command mnemonic, [PROFILE], plus the command action keyword, SAVEAS, and a userdefined “name”, saves the current configuration settings of the receiver as a user profile with the
specified name. Each user profile is stored in the receiver with a name. A controller solution,
such as StarUtil 5000, is used to activate a user-defined profile by its name.
Before turning off the receiver, to make the current profile available for future
use, the user must save the current profile as a user profile if it is not saved
already. Refer to PROFILE (ASCII) for detailed information.
A new profile sent to the receiver replaces the currently used profile, but it does not
necessarily replace all the current parameter settings. The new profile replaces only those
parameter settings that it specifies.
For example:
The default navigation elevation mask is 7°.
The user changes the elevation mask to 12° in a profile named “Test”. The user
subsequently sends profile “RTK” to the receiver. It replaces “Test”, and changes
navigation mode settings and port assignments.
But profile “RTK” does not specify a setting for the navigation elevation mask. So, the
elevation mask remains at 12°, as previously set by the “Test” profile.
NMEA Messages Overview
This product provides support for selected sentences defined in the National Marine Electronics
Association (NMEA) document 0183 “Standard for Interfacing Marine Electronic Devices”,
Version 3.01, January 1, 2002. These messages are all prefixed with the string value “NMEA”,
and can be viewed as a common set of sentences describing navigation data.
These NMEA sentences describe mechanics for GPS, GLONASS and WAAS satellites. To
differentiate them, NMEA defines the following naming convention for satellite ids:
GPS satellites are identified by their PRN numbers, which range from 1 to 32.
The numbers 33-64 are reserved for WAAS satellites. The WAAS system PRN numbers are
120-138. The offset from NMEA WAAS SV ID to WAAS PRN number is 87. A WAAS PRN
number of 120 minus 87 yields the SV ID of 33. The addition of 87 to the SV ID yields the
WAAS PRN number.
The numbers 65-96 are reserved for GLONASS satellites. GLONASS satellites are identified
by "64 + satellite slot number". The slot numbers are 1 through 24 for the full GLONASS
constellation, giving a range of 65 through 88. The numbers 89 through 96 are available if
slot numbers above 24 are allocated to on-orbit spares.
The NMEA sentences describe the satellite population using the following naming convention:
32
Page 33

Onyx Technical Reference Manual Rev. A
$GAxxx, describes data generated from Galileo satellites only
$GPxxx, describes data generated from GPS satellites only
$GLxxx, describes data generated from GLONASS satellites only
$GNxxx, describes data generated from mixed GPS, GLONASS, and Galileo satellites
The following are some common definitions that appear in NMEA sentences in particular, and in
GPS frequently. Each represent s a value that is accurate, but does not necessarily conform to
any given mathematical range limits.
Dilution of precision is a figure of merit describing the navigation efficiency provided by the
satellite geometry. This value manifests in one, two or three dimensions, and is always "the
lower the better", with 1 being the ideal (best) value, and usually anything over about 20 is
bad.
Geoidal height and mean sea level form virtual boundaries that define the surface of the
Earth. These values grow in tables accrued by continuous surveying.
DGPS correction age is the number of seconds since the last differential correction packet
arrived from a reference station. A few seconds is okay, but many seconds indicate the fix is
degrading over time, and becoming less and less accurate.
A standard deviation is used to measure the error in any calculation, for example latitude or
longitude. If the measurement is good, the standard deviation will be small. If not, it will be
large.
The signal to noise ratio is a number that represents how "loud" the information is when
compared to the ambient noise. This number is specific to the measurement.
Speed over ground is the actual speed the GNSS unit is moving over the ground. This may
differ from airspeed or nautical speed due to such things as head winds or sea conditions.
Delta values for Solid Earth tides are governed by the Earth, the Moon, and other factors
that also affect ocean tides. There is no specific range.
Refer to the fore-matter for the address of the headquarters of the National Marine
Electronics Association (NMEA). The NMEA messages listed in this manual begin
with Section 8, $GPxxx, describes data generated from GPS satellites only,
$GLxxx, describes data generated from GLONASS satellites only, $GNxxx,
describes data generated from mixed GPS and GLONASS or GALILEO satellites
33
Page 34

Onyx Technical Reference Manual Rev. A
Table 11: Supported Standard NMEA Messages
NMEA Message Description
ALM GPS Almanac Data
GBS G NSS Satel lit e Fault Det ec tion
GGA Global Positioning System Fix Data
GLL Geographic Posit io n – Latitude/Longitude
GRS GNSS Range Residuals
GSA G NSS DOP and Ac ti ve Status Satel lites
GST GNSS Pseudorange Error Statistics
GSV GNSS Satellites in View
HDT Heading, Degrees True
MLA GLONASS Almanac Data
RMC Recommended Minimum Specific GNSS Data
ROT Rate of Turn
VTG Course over Ground and Ground Speed
ZDA Time and Data
Table 12: Supported Non-Standard NMEA Messages
NMEA Message Description
PNCTGGA Global Positioning System Fix Data, with additional station ID information
PNCMDE Marginally Detectable Error
PNCTGST Scaled Pseudorange Noise Statistics
PNCTSET Solid Earth Tide Correction
RRE Range Residual Error
GPS Week Number
The GPS Week Number count began at midnight on the evening of 05 January 1980 / morning
of 06 January 1980. Since that time, the count has been incremented by 1 each week, and
broadcast as part of the GPS message. The GPS Week Number field in the data stream is
modulo 1024. This meant that at the completion of week 1023, the GPS week number rolled
over to 0 on midnight GPS Time of the evening of 21 August 1999 / morning of 22 August 1999.
34
Page 35

Onyx Technical Reference Manual Rev. A
GT
Sun
Mon
Tue
Wed
Thu
Fri
Sat
0:00:00
0
86400
172800
259200
345600
432000
518400
1:00:00
3600
90000
176400
262800
349200
435600
522000
2:00:00
7200
93600
180000
266400
352800
439200
525600
3:00:00
10800
97200
183600
270000
356400
442800
529200
4:00:00
14400
100800
187200
273600
360000
446400
532800
5:00:00
18000
104400
190800
277200
363600
450000
536400
6:00:00
21600
108000
194400
280800
367200
453600
540000
7:00:00
25200
111600
198000
284400
370800
457200
543600
8:00:00
28800
115200
201600
288000
374400
460800
547200
9:00:00
32400
118800
205200
291600
378000
464400
550800
10:00:00
36000
122400
208800
295200
381600
468000
554400
11:00:00
39600
126000
212400
298800
385200
471600
558000
12:00:00
43200
129600
216000
302400
388800
475200
561600
13:00:00
46800
133200
219600
306000
392400
478800
565200
14:00:00
50400
136800
223200
309600
396000
482400
568800
15:00:00
54000
140400
226800
313200
399600
486000
572400
16:00:00
57600
144000
230400
316800
403200
489600
576000
17:00:00
61200
147600
234000
320400
406800
493200
579600
18:00:00
64800
151200
237600
324000
410400
496800
583200
19:00:00
68400
154800
241200
327600
414000
500400
586800
20:00:00
72000
158400
244800
331200
417600
504000
590400
21:00:00
75600
162000
248400
334800
421200
507600
594000
22:00:00
79200
165600
252000
338400
424800
511200
597600
23:00:00
82800
169200
255600
342000
428400
514800
601200
23:59:59
86399
172799
259199
345599
431999
518399
604799
GPS Time
The GPS time (seconds into the week) always starts on Sunday morning at 00:00 GMT. Each
24 hour period contains 86,400 seconds. A full week contains 604,800 seconds. Please see the
table below for a breakdown of hourly / daily increments.
35
Page 36

Onyx Technical Reference Manual Rev. A
System Control & Response Commands
This section details formats for
Onyx Input Commands (in alphabetical order according to their identifying mnemonics)
Onyx Output Messages (in alphabetical order according to their identifying mnemonics)
Legacy and current Proprietary RTK Correction Messages
Other Correction Output and Input Message Types
Reserved place holders are used throughout this manual to maintain alignment
integrity with the master internal Interface Control Document maintained by
NavCom Engineering.
1 Onyx Input Commands Detailed Formats
This section provides Onyx Input Commands in alphabetical order according to their identifying
mnemonics. Each command is provided in a table with definitions of each command parameter.
1.1 1PPS (ASCII)
SF-5050 Onyx
This command is used to set up and control the output of the programmable PPS signal. 1PPS
is available TBD.
Command:
Parameter Definition
polarity K Keyword that defines the polarity of the PPS pulse (NEGATIVE, POSITIVE)
width I Sets the width of the PPS pulse (integer, nano-seconds) (13-1600000)
interval I Sets the interval in between pulses (integer, milli-seconds) (1-32768)
delay_MS I Sets the delay of the PPS pulse from GPS time (integer, milli-seconds) (0-32768)
delayNS I
Default: polarity = POSITIVE, width = 1000000 ns, interval = 1000 ms, delayMS = 0,
delayNS = 0
[1PPS] polarity, width, interval, delayMS, delayNS
Sets an additional delay of the PPS pulse from GPS time (integer, nano-seconds)
(0-999999)
Polarity, width, interval, delayMS, delayNS are all optional arguments.
Examples:
[1PPS] NEGATIVE,1500000,2000,50,30
Configures PPS to output a signal with a negative pulse that is 1.5ms wide, every
2 seconds, and delayed from GPS time by 50ms and 30ns
36
Page 37
Onyx Technical Reference Manual Rev. A
1.2 2DNAVMODE (ASCII)
SF-5050 Onyx
This command is used to enable or disable GPS navigation with height constrained (2D
navigation) and set the height constraint when the receiver computes a 2D navigation solution.
Command:
Parameter Definition
mode K 2D navigation mode, keyword (NEVER, ALWAYS, AUTO)
height F
Default: NEVER
[2DNAVMODE] mode, hei g ht
Value used to constrain the height relative to mean sea level (float, meters) (-100 m.
to 30980 m.). This argument is optional; if no height is entered, the GNSS receiver
uses its previous height for the 2D solution. The height value out of valid range (-100
m to 30980m) is rejected as an invalid argument.
Upper height limit imposed due to export limitations
Use 2D navigation mode only when the height can be constrained accurately.
Otherwise, large errors may occur in the position solution.
Examples:
[2DNAVMODE] AUTO
Command the receiver to automatically switch between 2D and 3D modes as needed.
[2DNAVMODE] ALWAYS, 10.5
Command the receiver to switch to 2D mode and set 2D height to 10.5 meters.
[2DNAVMODE] ALW AYS
Command the receiver to switch to 2D mode and use its previous height constraint for
2D solution.
37
Page 38

Onyx Technical Reference Manual Rev. A
1.3 3RDPARTYRTKGLONASS
SF-5050 Onyx
This command turns on or off GLONASS RTK corrections usage in RTK.
This feature does not support RTCM 2.3 or RTCM 20/21.
Command:
Parameter Definition
ON,OFF Keyword: AUTO_ON_OFF = (AUTO, ON, OFF)
Receiver Type NAV, NOV, TRI, JVD, TOP, LEI, UNKNOWN, MANUAL
Bias* Float: Bias* = Bias valu e when Receiver Type is MANUAL
Default: OFF
[3RDPARYRTKGLONASS] {AUTO, ON, OFF}, {Receiver Type}, {Bias*}
The abbreviations given in the Receiver Type Parameter list refer to the following
third party receivers:
NAV: Navcom
NOV: Novatel
TRI: Trimble
JVD: Javad
TOP: Topcon Positioning Systems
LEI: Leica
Examples:
[3RDPARTYRTKGLONASS] OFF
Receiver will not use GLONASS RTK corrections in RTK.
[3RDPARTYRTKGLONASS] ON, NAV
Receiver will use Glonass RTK corrections from a Navcom receiver.
[3RDPARTYRTKGLONASS] ON, NOV
Receiver will use Glonass RTK corrections from a Novatel receiver.
[3RDPARTYRTKGLONASS] ON, MANUAL,-0.0256
Receiver will use Glonass RTK corrections with the specified bias value.
[3RDPARTYRTKGLONASS] ON, UNKNOWN
Receiver will not fix Glonass Satellite Ambiguity but it will be used in L1PNAV as float.
38
Page 39

1.4 3RDPARTYRTKX
Onyx Technical Reference Manual Rev. A
This command enables an enhanced version of StarFire-GNSS which will calculate an improved
bias vector for the RTK-X corrections coming from a 3
rd
party (non NavCom) base. These
corrections are not required for RTK-X corrections from a NavCom base.
Enabling this feature will turn off the Starfire Backup Engine (SF GPS) and will use
that engine to calculate the bias vector for the RTK-X solution. Apply only if using
SF GNSS and not SF GPS. If use of SF GPS is desired, this feature must be
turned OFF and NCT RTK corrections applied. Switching this command from ON to
OFF will enable the SF GPS engine, but it will also cause it to re-converge and pullin again.
Command:
Parameter Definition
ON,OFF
Default: ON
This command is linked to the RTK-X Option of the [RTKMODE] command. The user will not be
able to enable this command if the RTK-X Option is set to OFF. Changing the RTK-X option to
ON or OFF will change this command to ON or OFF respectively. To disable this command after
enabling the RTK-X option, it must be explicitly turned OFF and the profile saved.
[3RDPARTYRTKX] {ON, OFF}
Keyword: {ON,OFF}
ON: Enables the enhanced StarFire corrections.
OFF: Disables the enhanced StarFire corrections.
The user must also ensure that [STARFIREMODE] is set to BOTH and
[3RDPARTYRTKGLONASS] is enabled for this command to function.
Examples:
[3RDPARTYRTKX]ON
Will turn on the enhanced SF corrections. The bias vector for the 3rd party RTK base will
be corrected.
[3RDPARTYRTKX]OFF
Will turn off the enhanced SF corrections. The bias vector for the 3rd party RTK base will
not be corrected. The unenhanced StarFire corrections must re-converge and pull-in
again.
39
Page 40

Onyx Technical Reference Manual Rev. A
1.5 ALM1B
SF-5050 Onyx
This command allows the user to enter almanac data for GPS, GALILEO, SBAS or GLONASS.
From a cleared memory without an almanac present, it takes about 13 minutes after satellite
lock to obtain and display complete almanac information. Wth an almanac present, it takes only
a matt er of seconds.
Command:
The format of the binary message is defined in Table 13.
For detailed information on the almanac data format, see the GPSALM1B, GLALM1B and
GNALM1B commands.
[ALM1B[ {Binary message}
Table 13: ALM1B Binary message data
Data Item Data Type
Satellite type (-1=NONE, 0=GPS,
1=GALILEO, 2=SBAS, 3=GLONASS,
4=BEIDOU, 5=QZSS)
Almanac data
U08
The ALM1B command does not produce a status message if entered without an
argument. To output the current almanacs, schedule the ALM1B message.
40
Page 41

Onyx Technical Reference Manual Rev. A
1.6 ANTALIGN (ASCII)
SF-5050 Onyx
This command specifies the alignment of the two antennas in a fixed-antenna MBRTK system.
Command:
Parameter Definition
mode K
[ANTALIGN] mode, <user_angle>
Keyword: LAT, LON, or USER
LAT: Antennas are aligned side-by-side with respect to the center-line of the vehic le .
LON: Antennas are aligned along the center-line
USER: Antennas are aligned at some user-specified angle.
Default: LON
The user-specified angle between the rover antenna and the base antenna with respect
user_angle F
to the center-line of the vehicle in degrees, float, range = 0-360.
Default: 0
Default: LON
Figure 1: Antennae Alignment – Lateral and Longitudinal
Examples:
[ANTALIGN] LAT
Two fixed antennas are laterally installed.
[ANTALIGN] LON
Two fixed antennas are longitudinally installed.
[ANTALIGN] USER, 45
Longitudinally installed with additional rotation of 45 degrees
41
Page 42

Onyx Technical Reference Manual Rev. A
SF-5050 and Onyx do not use any Antenna Phase Center corrections
and +127 millimeters, as appropriate
1.7 ANTENNAHEIGHT (ASCII)
SF-5050 Onyx
This command is used to enable or disable the antenna height adjustment.
Command:
Parameter Definition
mode K Keyword (ON, OFF) to enable/disable the antenna height adjustment.
phase_center_adj I
slant_range I Slant range of antenna body: -32768 - +32767 (Integer, millimeters)
radius I Radius of antenna body: -32768 - +32767 (Integer, millimeters)
Default: OFF
[ANTENNAHEIGHT] mode, phase_center_adj, slant_range, radius
(repeat for each antenna)
other than the internl Antenna database, thus it becomes “reserved” and
its value is always set to 0.
If a third party antenna is used and it is listed in the internal database this
value is also set to 0. Refer to ANTLIST.
If a third party antenna is used, the user may set this value between -128
If the mode is set to ON for any antenna, the phase center adjustment, slant range,
and radius must be specified for that antenna.
Information may be entered for all antennas even if they are not currently attached
(see NUMANTENNAS).
Examples:
[ANTENNAHEIGHT]ON,5,5000,3000
Enable antenna phase center adjustment for antenna #1
[ANTENNAHEIGHT],,,,ON,5,5000,3000
Enable antenna phase center adjustment for antenna #2, leaving the settings for
antenna#1 unchanged.
[ANTENNAHEIGHT]
[ANTENNAHEIGHT]ON,5,5000,3000,OFF,0,0,0
Display current ANTENNAHEIGHT settings for both antennas.
42
Page 43

Onyx Technical Reference Manual Rev. A
1.8 ANTENNAINFO (ASCII)
SF-5050 Onyx
This command allows the user to store and retrieve information about the antennas. This
information includes the type, t he serial number and the setup id. This command is formatted
as shown in the following list.
Command:
Parameter Definition
type Z
serial number Z Serial number, ASCII string, 0-32 characters, default = empty
setup_id I Setup id, integer, 0-255, default = 0
[ANTENNAINFO] “name”, “serial_number”, setup id (repeated for each
antenna)
Antenna type – Name of antenna specified in antenna database or
entered by the user.
“NONE” tells the receiver to use 0 PCO and PCV values.
Default: “NAVANT5001R NONE”, “”, 0, “NONE”, “”, 0
Examples:
Store and query the name, serial number and setup ID for antennas 1 and 2:
[ANTENNAINFO] “NAVANT5001R NONE”, “123abc”, 1
Sets antenna 1 to type NAVANT5001R NONE, serial number 123abc, setup ID 1
[ANTENNAINFO] "NAVANT 50 0 1R NONE"
Sets antenna 0 to type NAVANT5001R Antenna. Exactly 20 chars inside of “” as
required.
43
Page 44

1.9 ANTLIST
SF-5050 Onyx
Lists the names of all the antennae in the PCO/PCV database.
Onyx Technical Reference Manual Rev. A
Command:
Parameter Definition
listoption K
Default: NA
Examples:
[ANTLIST]
List Antennas 1-200
[ANTLIST] LAST200
List Antennas 201-399
[ANTLIST] listoption {<BLANK>, FIRST200, LAST200} (optional
parameter)
FIRST200, LAST200 (optional parameter)
<BLANK> - List Antennas 1-200
FIRST200 – List Antennas 1-200
LAST200 – List Antennas 201-399
44
Page 45

Onyx Technical Reference Manual Rev. A
1.10 ANTPOWER
SF-5050 Onyx
This command controls the power to the G NSS 1 and GNSS 2 antenna LNA’s.
Command:
Parameter Definition
OFF K Antenna LNA power off
ON K Antenna LNA power on
Power setting for both antennas must be specified
Default: [ANTPOWER ] ON , OFF
[ANTPOWER] on_off<GNSS 1>, on_off<GNSS 2>
This command is also available in manufacturing test.
Examples:
[ANTPOWER] OFF, ON
Turn the GNSS 1 antenna LNA power off and the GNSS 2 antenna LNA power on
45
Page 46

Onyx Technical Reference Manual Rev. A
AUTO or MANUAL If manual the user must specify the remote
base station’s antenna type
Antenna type – This is a quoted string specifying the antenna
name in the antenna database. See the ANTLIST for valid names.
1.11 ANTREMOTE
SF-5050 Onyx
This command tells the receiver configured as a rover whether to try to automatically detect the
remote base station’s antenna type from the corrections messages. The user may manually
specify the antenna type as well.
Command:
[ANTREMOTE] mode, type
Parameter Definition
mode K
type S
Default: [ANTREMOTE] AUTO, “NONE”
Examples:
[ANTREMOTE] AUTO
Determine the remote base station’s antenna type from the corrections messages
[ANTREMOTE] MANUAL, “JDCSF60 00 NONE”
The remote base station is set to manual mode and has an SF6000 antenna
[ANTREMOTE] AUTO, “JDCSF6000 NONE”
The remote base station is set to auto mode and won’t change the current remote
antenna type until the corrections messages such as 1007/1008/1033/NCT62_1033 is
received. The antenna type after “AUTO” is NOT necessary, and does NOT take effect.
46
Page 47

Onyx Technical Reference Manual Rev. A
1.12 ANTSWAP
SF-5050 Onyx
This command swaps which antenna is connected to which RF ASIC
Command:
Parameter Definition
OFF K Antenna jack J3 is connected to RF ASIC 0, J4 to RF ASIC 1
ON K Antenna jack J4 is connected to RF ASIC 0, J3 to RF ASIC 1
RESET K RESET – Reset receiver after changing antenna connection (default)
Default: [ANTSWAP] OFF
[ANTSWAP] on_off {, reset }
Only RF ASIC 0 can be used for L-Band (tracking StarFire). Please be sure that the
antenna connected to RF ASIC 0 is capable of L-Band.
This command is also available in manufacturing test
Chang ing the ANTSWAP setting causes the receiver to reset itself.
Examples:
[ANTSWAP] ON
Connect antenna jack J4 to RF ASIC 0 and J3 to RF ASIC 1 and reset the receiver.
[ANTSWAP]ON, RESET
Connect antenna jack J4 to RF ASIC 0 and J3 to RF ASIC 1 but do not reset the
receiver
47
Page 48

Onyx Technical Reference Manual Rev. A
1.13 ARLENGTHCONSTR (ASCII)
SF-5050 Onyx
This command is used to specify whether to use baseline length as ambiguity constraint and
pseudo measurement. In order to make the setting valid, receiver must be in MBRTK rover
mode and the fixed baseline must be set.
Command:
Parameter Definition
ON_OFF K Indicates whether the mode is on or off.
Default: OFF
Examples:
[ARLENGTHCONSTR] ON
Use length as constraint
[ARLENGTHCONSTR] OFF
Do not use length as constraint
[ARLENGTHCONSTR]
Displays length constraint status
[ARLENGTHCONSTR] ON_OFF
48
Page 49

Onyx Technical Reference Manual Rev. A
1.14 AUTOSCHEDULEDTM
SF-5050 Onyx
This command controls the automatic scheduling of NMEADTM and NMEAPNCTDTM
messages.
If this command is enabled, then:
1. NMEADTM will be scheduled automatically ONCHANGE or ONTIME whenever the user
schedules NMEAGGA, NMEAGLL, NMEARMC, or NMEAGNS.
a. The NMEADTM will always change to match the fastest output rate scheduled on
a specific port.
b. If either of the messages listed is scheduled ONCHANGE, then NMEADTM will
be scheduled ONCHANGE.
c. If none of the above is scheduled ONCHANGE, but ONTIME instead, then
NMEADTM will be scheduled ONTIME with an interval matching the fastest
scheduled interval of the above messages.
2. NMEAPNCTDTM will be scheduled automatically ONCHANGE whenever the user
schedules NMEAPNCTGGA.
a. The NMEAPNCTDTM will always change to match the message listed above.
3. The user will have to deschedule the DTM messages manually even if all the other
related messages have been descheduled. The DTM messages will only change if any
of the messages listed change to ONCHANGE or ONTIME state.
Command:
Parameter Definition
ON K Enables the autoscheduling on all ports
OFF K Disables the autoscheduling on all ports
[AUTOSCHEDULEDTM] on_off
Default: ON
Examples:
[AUTOSCHEDULEDTM] ON
Turns on automatic scheduling
49
Page 50

Onyx Technical Reference Manual Rev. A
1.15 BOOTLOADA (ASCII)
SF-5050 Onyx
This command is used to initiate a GNSS board software download using GNSS Bootloader1 or
Bootloader2.
Command:
Parameter Definition
command K The only valid command is PING
target K
action K What action the bootloader is to take (see Table 14 and Table 15).
[BOOTLOADA] command, target, action
For [BOOTLOADA] command sent from PC to receiver, this is which bootloader to
transfer control to (BOOT1, BOOT2)
For [BOOTLOADA] reply sent from receiver to PC, this is the target software type that
generates the reply. (NAV_PROG)
Bootloader1 can only perform Bootloader1 actions and Bootloader2 can only
perform Bootloader2 actions.
The Power I/O board uses a Virtual COM port interface for the USB and Ethernet
ports, so all bootloading is done using the LOADSERIALBOOTx actions.
Example: [BOOTLOADA] PING, BOOT2, LOADSERIALBOOT2
Bootload through a serial port using BOOT2
Table 14: BOOTLOADA Bootloader1 Actions
Bootloader1 Action Description
BOOT1
BOOT2 Start boot lo ader2.
NAV Start the navigation program .
MTEST Start the manufacturing test program.
LOADSERIALBOOT1
Remain in bootloader1. Do not try to start the navigation program
automatically.
Bootload through the serial port using bootloader1. For SF-5050, bootloader1
only supports loading through COM1.
Table 15: BOOTLOADA Bootloader2 Actions
Bootloader2 Action Description
Bootload through the serial port using bootloader2. For the SF-5050,
LOADSERIALBOOT2
Reserved --
*For information on loading firmware without using StarUtil 5000, See Appendix G
bootloader2 supports loading through COM1, COM2, USB and Ethernet.
Loading through COM2, USB and Ethernet requires that Power I/O board
software is up and running.
50
Page 51

Onyx Technical Reference Manual Rev. A
Number of bytes in the binary header plus the
1.16 BOOTLOADB
SF-5050 Onyx
GNSS Bootloader1 and Bootloader2 monitor the serial ports for the download of binary software
messages. [BOOTLOADB] is the message ID for the software that is being downloaded. It uses
the simplified binary header format described below.
Field # Bit s Type Description
Length 16 U16
1.16.1 Bootload Input File Format
The input file to the bootload process is the “.s19” file. This file format is generated by
the software build process post-linker tool. It is the standard Motorola s-record file with
special s0 record for the SF-5050.
The input file for the GNSS board bootload process could be one of the following:
GNSS bootloader1, bootloader2 and NAV program (main application).
The input file for the PowerIO board bootload process could be one of the following: PIO
bootloader and application program.
1.16.1.1 SF-5050 S0 Record Format
For the SF-5050, the s19 file includes multiple lines of s0 records, which contain useful
information about the details of the software image, including the version, product type,
product string, build data, time, etc. The information can be used with the bootloading
tool to tell which program it is loading. Some older versions of the s19 file build do not
implement this format of the s0 record.
The first s0 record contains the string “NCT SWINFO VER 001”. Th is lin e def in e s t he
version of the software info structure that follows. The “001” is the current version.
data block i.e. data block length plus 2 bytes
for the length of this header
The second, third, and fort h lines of the s0 record contain the software_info structure
defined below.
Table 16: Software Info Structure Definition
Field Data Type Value and Description
CRC32 pointer U32 Address of the CRC32 of the whole software image
Major version U08 Software major version
Minor version U08 Software minor version
Build number U08 Software build number
Software type U08 Software type enum defined in Table 21
Data U08[12] ANSI C standard software build date string.
Table continued on next page…
51
Example: Mar 13 2009
Page 52
Onyx Technical Reference Manual Rev. A
Field Data Type Value and Description
Time U08[9] ANSI C standard software build time string; example: 17:17:11
Reserved1 U08[3] Reserved field
Product type U08
Spin number U08 Software spin number
Reserved2 U08 Reserved field
Swinfo_ver U08 Software Info structure (this structure) version
Product string U08[28] Descriptive text string for the product. See Table 21 for the list.
The data portion of those s0 records contains a maximum of 44 hex characters
(representing 22 bytes of data). The total size of the software_info structure is 64 bytes,
so the second and third s0 record contain 22 bytes of data, and the forth s0 record
contains 20 bytes of data.
Example s0 records for bootloader1 “.s19” file:
S01600004E4354205357494E464F20564552203030310050
S0190000FFF12AA0010201004A756C203234203230303900313724
S01900003A32313A33380000000003000001534F4C415249532063
S0170000474E535320424F4F54310000000000000000000028
Decoding of the first s0 record:
S0 16 0000 4E4354205357494E464F2056455220303031 00 50
length | N C T S W I N F O V E R 0 0 1 | checksum
address terminating null character
1.16.2 BOOTLOADB Message Body General Format
The BOOTLOADB message general format is defined in the following table:
Table 17: BOOTLOADB Binary Message
Data Item (8 Bytes + data) Data Type Section
Function Type SubID (enum) U08 1.25.2.1
Pass or Fail (1 = pass, 0 = fail) U08 1.25.2.2
Valid count U16 1.25.2.3
Address U32 1.25.2.4
Data U08[] 1.25.2.5
1.16.2.1 Function Type
Function Type provides a Function/SubID of the command. The following function type
subIDs are defined as enum: (Enums ending with “Cmd” are commands sent from a PC
tool to the receiver. Enums ending with “Rep” are replies sent from the receiver to a PC
tool).
52
Page 53
Onyx Technical Reference Manual Rev. A
Table 18: BOOTLOADB Message Function SubID Enum Definition
Value Enum Name
1 NB_PingCmd
2 NB_PingRep,
3 NB_BaudCmd,
4 NB_BaudRep,
5 NB_SetupCmd,
6 NB_SetupRep,
7 NB_LoadDataCmd,
8 NB_LoadDataRep,
9 NB_ChkCrcCmd,
10 NB_ChkCrcRep,
11 NB_ProgCmd,
12 NB_ProgRep,
1.16.2.2 Pass or Fail
For a reply message, this field indicates if the previous command passed or failed. For a
command message, this field is either not used or has another meaning.
1.16.2.3 Valid Count
This field indicates how many bytes in the data field are valid.
1.16.2.4 Address
When downloading data, this field indicates the destination address of the data. In a
response message, if the pass/fail field is fail, this field indicates the error code.
BootloadB and BootloadPIOB message error codes are defined in Table 19. This field
has other meanings under different circumstances.
13 NB_EraseCmd,
14 NB_EraseRep,
15 NB_WriteFCmd,
16 NB_WriteFRep,
17 NB_ResetCmd,
18 NB_ResetRep,
19 NB_Working,
20 NB_EnumLast
53
Page 54
Onyx Technical Reference Manual Rev. A
Table 19: BOOTLOADB and BootloadPIOB Message Error Codes
Value Enum Description
Err_PingTarget For the BootloadB command, this means Ping Target Error. This could be
caused by an invalid value in the ping_target (address) field in the
0
1 Err_InvalidBaud Invalid baud rate in NB_BaudCm d command
2 Err_SetupRange Address range error in NB_SetupCmd command
3 Err_LoadData Error in NB_LoadDataCmd command
Err_MaxAddr Maximum address error. This could be caused by the maximum address
4
Err_BadCrc Software image CRC error detected in replying to NB_ChkCrcCmd
5
6 Err_EraseFlash Erase flash error
7 Err_WriteFlash Write to flash error
NB_PingCmd command, or by trying to ping bootloader2 when
bootloader1 is running.
For the BootloadPIOB command, this enum is not used.
of the data received being inconsistent with the value s pec if ied in
NB_SetupCmd command.
command
8 Err_Reset Receiver reset error
100
Err_SubID Unknown subID received in [BOOTLOADB] or [BOOTLOADPIOB]
command
1.16.2.5 Data
In the NB_LoadDataCmd message, this field contains the data. It has other meanings in
other SubID messages. The maximum size of this field is 2048 bytes. If loading through
the Ethernet port using UDP, the maximum size should be less than about 1400 bytes.
1.16.3 BootloadB SubID Message Format
1.16.3.1 SubID NB_PingCmd Message Format
The SubID NB_PingCmd is sent from a PC to the receiver. It is used by the PC to ping
the receiver bootloader software and to start the bootloading process. Its format is
defined in Table 20.
Table 20: SubID NB_PingCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 0. This field is not used for this command
Valid count U16 0. There is no data following the address field
Enum NB_PingCmd.
Address U32
Ping_Target: Ping_Target is the receiver software type that the
PC program is trying to ping. The software type enum is defined
in Table 21. For this command, the valid value is
ST_Bootblock1 or ST_Bootblock2.
For the SF-5050, Bootloader1 can be used to lo ad an y GNS S
board software from COM1 except itself. Bootloader2 can be
used to load any GNSS board software from both COM1 and
COM2. Use bootloader2 to load software whenever po ss ible.
54
Page 55

Onyx Technical Reference Manual Rev. A
Table 21: Software Type Enum
Product String
Value Enum Description
(in Software Info
Structure)
0 ST_BOOTBLOCK1 GNSS board Bootloader1 software “GNSS BOOT1”
1 ST_BOOTBLOCK2 GNSS board Bootloader2 software “GNSS BOOT2”
2 ST_NAVPROG GNSS board Navigation software “NAV”
3 Reserved Reserved Reserved
4 ST_PIOBOOT1 PIO board bootloader1 “PIOBOOT1”
5 ST_PIOBOOT2 PIO board bootloader2 “PIOBOOT2”
6 ST_PIOAPP PIO board application “PIOAPP”
1.16.3.2 SubID NB_PingRep Message Format
SubID NB_PingRep is sent from receiver to PC. It is the reply message for
NB_PingCmd. Its format is defined in Table 22.
Table 22: SubID NB_PingRep Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0. There is no data following the address field
Address U32 If pass, this field contains the enum of the software type
Enum NB_PingRep.
that generates this response.
If fail, this field contains error code Err_PingTarget.
1.16.3.3 SubID NB_BaudCmd Message Format
SubID NB_BaudCmd is sent from the PC to a receiver. It is used by the PC to specify an
alternative Baud rate for bootloading. This message is not required if the Baud rate
doesn’t need to be changed.
For the SF-5050, if GNSS software bootloading port is USB or Ethernet, this command
has no effect and should not be sent. Also, due to hardware architecture design, if
GNSS software bootloading port is COM2, this command is not sent.
55
Page 56
Onyx Technical Reference Manual Rev. A
Table 23: SubID NB_BaudCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 0. This field is not used for this command
Valid count U16 0. There is no data following the address field
Address U32 The Baud rate the PC commands the receiver to change
Enum NB_BaudCmd
to. The supported Baud rates are: 1200, 2400, 4800,
9600, 19200, 38400, 57600, 115200
1.16.3.4 SubID NB_BaudRep Message Format
SubID NB_ BaudRep is sent from receiver to PC. It is the reply message for
NB_BaudCmd.
Table 24: SubID NB_BaudRep Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0. There is no data following the address field
Address U32 If pass, this field is 0.
Enum NB_ BaudRep.
If fail, this field contains error code Err_InvalidBaud.
The receiver sends out this reply at the original baud rate, and then changes the port
baud rate to the value specified in the NB_BaudCmd command.
The PC changes its baud rate after it receives this reply from the receiver. Wait 10 to
100 ms bef ore sending the next command from the PC to allow both the receiver and
the PC to finish changing the baud rate.
1.16.3.5 SubID NB_SetupCmd Message Format
SubID NB_SetupCmd is sent from the PC to the receiver. It is used by the PC to specify
the minimum and maximum address of the data to be loaded.
Table 25: SubID NB_SetupCmd Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_SetupCmd.
Pass or Fail U08 0. This field is not used for this command
Valid count U16 4. This is the data size following the address field (in
bytes)
Address U32 Minimum address of the software image data to be
loaded
Data U32 Maximum address of the software image data to be
loaded
56
Page 57
Onyx Technical Reference Manual Rev. A
1.16.3.6 SubID NB_SetupRep Message Format
SubID NB_SetupRep is sent from receiver to PC. It is the reply message for NB_
SetupCmd. Its format is defined in Table 27.
Table 26: SubID NB_SetupRep Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_ SetupRep.
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0. There is no data following the address field
Address U32 If pass, this field is 0.
If fail, this field contains error code Err_SetupRange.
1.16.3.7 SubID NB_LoadDataCmd Message Format
SubID NB_LoadDataCmd is used for sending software image data from PC to receiver.
Table 27: SubID NB_LoadDataCmd Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_LoadDataCmd.
For SF-5050 GNSS bootloader1, this field is not used.
Value should be 0.
For SF-5050 GNSS bootloader2, this field is the data frame
number between 1 and 255 (inclusive). For each subsequent data messages, this number shall increment by 1.
When it reaches 255, next message shall have value 1
again.
Pass or Fail U08
Valid count U16 Number of data in the data field (in bytes)
Address U32 Destination address of the first data byte in data field
Data U08[] Array of software image data
The SF-5050 bootloader2 uses a sliding window so that
each data message does not need to be acknowledged
before sending the next. However, the window should be
kept reasonably small with high speed ports like Ethernet
and Bluetooth
If the SF-5050 bootloader 2 r ec eives a data message out of
order, it won’t ack or nak, which should cause a timeout for
PC to resend the old data frame. Current version of SF5050 bootloader1 doesn’t implement this mechanism. (This
field is not used in SF-5050 bootloader1)
®
. The recommended window size is 3.
1.16.3.8 SubID NB_LoadDataRep Message Format
SubID NB_LoadDataRep is sent from receiver to PC. It is the reply message for
NB_LoadDataCmd.
57
Page 58

Onyx Technical Reference Manual Rev. A
Table 28: SubID NB_ LoadDataRep Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_LoadDataRep.
Pass or Fail U08 1= pass, 0 = fail.
This is the length for the data field (in bytes).
Valid count U16
0 for SF-5050 bootloader1.
1 for SF-5050 bootloader2.
Address U32
Data U08
If pass, this field is the address in the received command.
If fail, this field contains error code Err_LoadData.
This field only exists for SF-5050 bootloader2. It contains
the data frame number of the received command that
generates this reply.
1.16.3.9 SubID NB_ChkCrcCmd Message Format
SubID NB_ ChkCrcCmd is sent from PC to receiver. It is used to tell the receiver that the
data loading process is complete. After receiving this command, the receiver starts
comparing the maximum address of the received data with the value in the
NB_SetupCmd message, and computing the CRC of all the received data. Its format is
defined in Table 29.
Table 29: SubID NB_ChkCrcCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 This field is not used for this command. Value should be 0.
Valid count U16 0
Address U32 0
Enum NB_ChkCrcCmd.
1.16.3.10 SubID NB_ChkCrcRep Message Format
SubID NB_ChkCrcRep is sent from receiver to PC. It is the reply message for
NB_ChkCrcCmd.
58
Page 59

Table 30: SubID NB_ChkCrcRep Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_ChkCrcRep.
Pass or Fail U08 1= pass, 0 = fail.
This is the length for the data field (in bytes).
Valid count U16
Address U32
4 if fail due to CRC error
0 otherwise
If pass, the value is 0.
If fail due to maximum address not equal to the value in
NB_SetupCmd, the value is error code Err_MaxAddr.
If fail due to CRC error, the value is error code Err_BadCrc.
Onyx Technical Reference Manual Rev. A
Data U32
This field only exists if fail due to CRC error. Its value is the
computed CRC32 of the data image.
1.16.3.11 SubID NB_ProgCmd Message Format
SubID NB_ ProgCmd is sent from PC to receiver. It is used to tell the receiver to start
programming the new data into Flash. After receiving this command, the receiver starts
erasing the Flash and writing the new data into Flash.
Table 31: SubID NB_ProgCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 This field is not used for this command. Value should be 0.
Valid count U16 0
Address U32 0
Enum NB_ProgCmd.
1.16.3.12 SubID NB_EraseRep Message Format
SubID NB_EraseRep is sent from receiver to PC. It is one of the reply messages for
NB_ProgCmd. The receiver sends out this message after it erases Flash, which typically
takes 1 to 3 seconds.
Table 32: SubID NB_EraseRep Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_EraseRep.
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0
Address U32
If pass, value is 0.
If fail, value is error code Err_EraseFlash.
59
Page 60

1.16.3.13 SubID NB_WriteFRep Message Format
SubID NB_WriteFRep is sent from receiver to PC. It is one of the reply messages for
NB_ProgCmd. The receiver sends out this message after it writes new data to Flash,
which can take up to 20 seconds, depending on program size.
Table 33: SubID NB_WriteFRep Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_WriteFRep.
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0
Onyx Technical Reference Manual Rev. A
Address U32
If pass, value is 0.
If fail, value is error code Err_WriteFlash.
1.16.3.14 SubID NB_Working Message Format
SubID NB_Working is sent from receiver to PC. It is one of the reply messages for
NB_ProgCmd. The receiver sends out this message at approximately 1 Hz rate when
the receiver is erasing Flash or writing data to Flash. It is used to keep the PC from
timing out because erasing and writing data to flash might take up to 20 seconds.
Table 34: SubID NB_Working Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_Working.
Pass or Fail U08 1
Valid count U16 0
Address U32 0
1.16.3.15 SubID NB_ResetCmd Message Format
SubID NB_ResetCmd is sent from PC to receiver. It is used to tell the GNSS board
software to do a software reset after bootloading. After reset, the GNSS board runs
navigation software if it exists; otherwise, it stays in bootloader1.
Table 35: SubID NB_ResetCmd Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_ResetCmd.
Pass or Fail U08 0
Valid count U16 0
Address U32 0
1.16.3.16 SubID NB_ResetRep Message Format
SubID NB_ResetRep is sent from receiver to PC. It is the reply message for
NB_ResetCmd. Its format is defined in Table 36.
60
Page 61

Table 36: SubID NB_ResetRep Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_ResetRep.
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0
Address U32 0
1.16.4 GNSS Software Loading Sequence
PC Receiver Navigation Software
Onyx Technical Reference Manual Rev. A
1. Send
“[BOOTLOADA] PING, BOOT1,
LOADSERIALBOOT1”
Or
“[BOOTLOADA] PING, BOOT2,
LOADSERIALBOOT2”
PC Receiver Bootloader1 or Bootloader2
3. If received [BOOTLOADA] reply, go to step 4.
If received NAK, continue to send the
[BOOTLOADA] command 2 more times, then
go to step 4.
4. Change PC baud rate to 57600 and send out
“[BOOTLOADB]NB_PingCmd” command. The
ping_target field should be consistent with the
one in [BOOTLOADA] command.
“[BOOTLOADB]NB_Pin gCmd” may need to be
sent out multiple times before a reply can be
received due to the receiver transitioning
between navigation software and bootloader1
or bootloader2. Sending this command at 5 Hz
rate until a reply is received is recommended.
Normally when bootloader1 starts, there is a
0.5 seconds window in which it listens to the
bootload command. Sending this command at
5 Hz rate will improve the chance of
bootloader1 catching the command within the
window and help receiver recovery in some
cases.
2. If GNSS board navigation software is running, it
decodes the command and replies with
“[BOOTLOADA]PING, NAV_PROG”.
Then it runs bootloader1 or bootloader2.
Bootloader1 and bootloader2 always run at the
default baud rate 57600.
If GNSS board bootloader1 or bootloader2 is
already running, the reply is NAK.
5. Bootloader1 or bootloader2 runs, receives the
command and replies w ith
[BOOTLOADB]NB_PingRep”.
PC Receiver Bootloader1 or Bootloader2
6. If the PC wants to change the baud rate, send
“[BOOTLOADB]NB_BaudCmd”; otherwise, go
to step 11.
This command is not sent under certain
circumstances. Refer to section 1.16.3.3
for more details.
61
7. Send “[BOOTLOADB]NB_BaudRep” and start
to change receiver baud rate.
Page 62

Onyx Technical Reference Manual Rev. A
PC Receiver Navigation Software
8. After receiving “[BOOTLOADB]NB_BaudRep”,
change PC baud rate.
9. Send “[BOOTLOADB]NB_PingCmd” again at
new baud rate. This message may need to be
sent multiple times before a reply is received,
due to lack of synchronization between PC and
receiver because of the changing baud rate.
Sending this command at 1 Hz rate until a reply
is received is recommended.
11. Send “[BOOTLOADB]NB_SetupCmd” 12. Reply with “[BOOTLOADB]NB_SetupRep”
13. Send “[BOOTLOADB]NB_LoadDataCmd” 14. Reply with “[BOOTLOADB]NB_LoadDataRep”
15. Repeat step 13 and 14 until all the software
image data are sent
16. Send “[BOOTLOADB]NB_ChkCrcCmd” 17. Reply with “[BOOTLOADB]NB_ChkCrcRep”
18. Send “[BOOTLOADB]NB_ProgCmd” 19. Start to erase Flash and send out
10. Reply with “[BOOTLOADB]NB_PingRep”
“[BOOTLOADB]NB_Working” at 1 Hz rate
20. Reply with “[BOOTLOADB]NB_EraseRep”
when finished erasing the Flash
21. Start to write new data to Flash and send
“[BOOTLOADB]NB_Working” at 1 Hz rate
22. Reply with “[BOOTLOADB]NB_WriteFRep”
when finished writing new data to the Flash
23. Send “[BOOTLOADB]NB_ResetCmd” 24. Reply with “[BOOTLOADB]NB_ResetRep”
and do GNSS software reset.
62
Page 63

Onyx Technical Reference Manual Rev. A
1.17 BOOTLOADPIOB
SF-5050 Onyx
This command is used for downloading new SF-5050 Power I/O cold bootloader and application
software images. The binary software downloading message has message ID
[BOOTLOADPIOB].
It uses the simplified binary header format described in Table 9
The input file format of the PIO bootload process is the same as described in 1.25.1
Because of architectural differences between the PIO cold bootloader and warm bootloader, the
commands and responses used near the end of the bootloading sequence are slightly different
for the two bootloaders.
1.17.1 Message General Format
The input file to the bootload process is the “.s19” file. This file format is generated by
the software build process post-linker tool. It is the standard Motorola s-record file with
special s0 record for Solstice.
The input file for the GNSS board bootload process could be one of the following:
GNSS bootloader1, bootloader2 and NAV program (main application).
The input file for the PowerIO board bootload process could be one of the following: PIO
bootloader1, bootloader 2 and application program.
Data Item (8 Bytes + data) Data Type Section
Function Type SubID (enum) U08 1.26.1.1
Pass or Fail (1 = pass, 0 = fail) U08 1.26.1.2
Valid count U16 1.26.1.3
Address U32 1.26.1.4
Data U08[] 1.26.1.5
1.17.1.1 Function Type
Function Type provides a Function/SubID of the command. The following function type
subIDs are defined as enum: (Enums ending with “Cmd” are commands sent from a PC
tool to the receiver. Enums ending with “Rep” are replies sent from the receiver to a PC
tool).
Table 37: BOOTLOADPIOB Binary Message
63
Page 64

Onyx Technical Reference Manual Rev. A
Table 38: BOOTLOADB Message Function SubID Enum Definition
Value Enum Name
1 NB_PingCmd
2 NB_PingRep,
3 NB_BaudCmd,
4 NB_BaudRep,
5 NB_SetupCmd,
6 NB_SetupRep,
7 NB_LoadDataCmd,
8 NB_LoadDataRep,
9 NB_ChkCrcCmd,
10 NB_ChkCrcRep,
11 NB_ProgCmd,
12 NB_ProgRep,
13 NB_EraseCmd,
14 NB_EraseRep,
15 NB_WriteFCmd,
16 NB_WriteFRep,
17 NB_ResetCmd,
18 NB_ResetRep,
19 NB_Working,
20 NB_EnumLast
1.17.1.2 Pass or Fail
For reply messages, this field indicates if the previous command passed or failed.
For command messages, this field is either not used, or another meaning (defined below).
1.17.1.3 Valid Count
This field indicates how many bytes in the data field are valid.
1.17.1.4 Address
When downloading data, this field indicates the destination address of the data.
In reponse messages, if the pass/fail field is fail, this field indicates the error code. Error codes
are defined in Table 19.
This field has other meanings under different circumstances (defined below).
1.17.1.5 Data
In NB_LoadDataCmd message, this field contains the data. It has other meanings in other
subID messages. The maximum size of this field is 2048 bytes. If loading through the Ethernet
port using UDP, the maximum size should be less than 1400 bytes.
1.17.2 BOOTLOADPIOB SubID Message Format
64
Page 65
Onyx Technical Reference Manual Rev. A
Baudrate PC wants receiver to change to. The supported
1200, 2400, 4800, 9600, 19 200, 384 00, 576 00, 11 520 0
1.17.2.1 SubID NB_PingCmd Message Format
SubID NB_PingCmd is sent from PC to receiver. It is used for PC to ping receiver bootloader
software and to start the bootloading process.
Table 39: SubID NB_PingCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 0. This field is not used for this command
Valid count U16 0. There is no data following the address field
Address
U32 0. The PIO does not require a “Target Type” in this message
Enum NB_PingCmd.
as does the GNSS firmware.
1.17.2.2 SubID NB_PingRep Message Format
SubID NB_PingRep is sent from receiver to PC. It is the reply message for NB_PingCmd. Its
primary function in the PIO firmware load process is to verify the PIO is ready to begin the
download process.
Table 40: SubID NB_PingRep Format
Field Data Type Value and Description
Function Type SubID U08 Enum NB_PingRep.
Pass or Fail U08 1. Always set to “PASS” by PIO firmware.
Valid count U16 0. There is no data following the address field
Address U32 Same as the address field in the NB_PingCmd msg.
1.17.2.3 SubID NB_BaudCmd Message Format
SubID NB_BaudCmd is sent from PC to receiver. It is used for PC to specify an alternative
baudrate for bootloading. This message is not required if baudrate doesn’t need to be changed.
If PIO software bootloading port is USB or Ethernet, this command has no effect and should not
be sent. Also, due to hardware architecture design, if PIO software bootloading port is COM1,
this command shall not be sent.
Table 41: SubID NB_BaudCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 0. This field is not used for this command
Valid count U16 0. There is no data following the address field
U32
Address
Enum NB_BaudCmd.
baudrates are:
1.17.2.4 SubID NB_BaudRep Message Format
SubID NB_ BaudRep is sent from receiver to PC. It is the reply message for NB_BaudCmd. Its
format is defined in Table 42.
65
Page 66

Onyx Technical Reference Manual Rev. A
If pass, this field is 0.
If fail, this field contains error code Err_InvalidBaud.
If pass, this field is 0.
If fail, this field contains error code Err_SetupRange.
Table 42: SubID NB_BaudRep Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0. There is no data following the address field
Address
U32
Enum NB_ BaudRep.
The receiver will send out this reply at the original baudrate, then change the port baudrate to
the value specified in the NB_BaudCmd command.
The PC shall change its baudrate after it receives this reply from receiver. It is recommended
that PC wait for 10 to100ms before it sends the next command to allow both the receiver and
PC to finish changing baudrate.
1.17.2.5 SubID NB_SetupCmd Message Format
SubID NB_SetupCmd is sent from PC to receiver. It is used for PC to specify the minimum and
maximum address of the data to be loaded.
Table 43: SubID NB_SetupCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 0. This field is not used for this command
Enum NB_SetupCmd.
Valid count U16 4. This is the data size following the address field (in bytes)
Address U32 Minimum address of the software image data to be loaded
Data U32 Maximum address of the software image data to be loaded
1.17.2.6 SubID NB_SetupRep Message Format
SubID NB_SetupRep is sent from receiver to PC. It is the reply message for NB_ SetupCmd.
Table 44: SubID NB_SetupRep Format
Field Data Type Val ue and Description
Function Type SubID U08
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0. There is no data following the address field
Address
U32
Enum NB_ BaudRep.
1.17.2.7 SubID NB_LoadDataCmd Message Format
SubID NB_LoadDataCmd is used for sending software image data from PC to receiver.
66
Page 67

Onyx Technical Reference Manual Rev. A
This field is the data frame number between 1 and 255
the 1st data frame in the current window.
This is the length for the data field (in bytes).
1 for Solstice bootloader2.
If pass, this field is address in the received command.
If fail, this field contains error code Err_LoadData.
This field contains data frame number of the received
command that generates this reply.
Table 45: SubID NB_LoadDataCmd Format
Field Data Type Value and Description
Function Type SubID U08
U08
Pass or Fail
Valid count U16 Number of data bytes in the data field.
Address U32 Destination address of the first data byte in data field
Data U08[] Software image data
Enum NB_LoadDataCmd.
(inclusive). For each sub-sequent data messages, this
number shall increment by 1. When it reaches 255, next
message shall have value 1 again.
The SF-5050 uses a sliding window so that each data
message does not need to be acknowle ged bef ore sen din g
the next. However, the window should be kept reasonably
small with high speed ports like Ethernet and Bluetooth
The recommended window size is 3.
If SF-5050 receives a data message out of order, it won’t ack
or nak, which should cause a timeout on the PC to resend
1.17.2.8 SubID NB_LoadDataRep Message Format
SubID NB_LoadDataRep is sent from receiver to PC. It is the reply message for
NB_LoadDataCmd.
®
.
Table 46: SubID NB_LoadDataRep Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1= pass, 0 = fail.
Valid count
Address
Data
U16
U32
U08
1.17.2.9 SubID NB_ ChkCrcCmd Message Format
The command SubID NB_ ChkCrcCmd is sent from PC to receiver. It is used to tell receiver
that the data loading process has completed. After receiving this command, the receiver will
start comparing the maximum address of the received data with the value in NB_SetupCmd
message, and computing CRC of all the received data.
Enum NB_LoadDataRep.
0 for Onyx and Solstice bootloader1.
67
Page 68
Onyx Technical Reference Manual Rev. A
This is the length for the data field (in bytes).
Otherwise its 0
If pass, value is 0.
If fail due to CRC error, value is error code Err_BadCrc.
This field only exists if failed due to CRC error. Its value is
the computed CRC32 of the data image.
Table 47: SubID NB_ChkCrcCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 This field is not used for this command. Value should be 0.
Valid count U16 0
Address U32 0
Enum NB_ChkCrcCmd.
1.17.2.10 SubID NB_ChkCrcRep Message Format
The command SubID NB_ ChkCrcRep is sent from receiver to PC. It is the reply mess age for
NB_ChkCrcCmd.
Table 488: SubID NB_ChkCrcRep Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1=Pass, 0= Fail.
U16
Valid count
U32
Address
Enum NB_ChkCrcRep.
If fails, due to CRC error then 4
If fail due to maximum address not equal to the value in
NB_SetupCmd, value is error code Err_MaxAddr.
Data
U32
1.17.2.11 SubID NB_ProgCmd Message Format
SubID NB_ ProgCmd is sent from PC to receiver. It is used to tell receiver to start programming
the new data into flash. After receiving this command, the receiver will start erasing the Flash
and writing the new data into flash.
The cold bootloader will send the NB_EraseRep, NB_WorkingRep and NB_WriteRep messages
(described below) while programming, then wait for additional commands. The warm bootloader
will respond with an NB_WriteFRep response, then automatically reboot after programming is
complete.
Table 49: SubID NB_ProgCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 This field is not used for this command. Value should be 0.
Valid count U16 0
Address U32 0
Enum NB_ProgCmd.
68
Page 69
Onyx Technical Reference Manual Rev. A
If pass, value is 0.
If fail, value is error code Err_EraseFlash.
If pass, value is 0.
If fail, value is error code Err_WriteFlash.
1.17.2.13 SubID NB_EraseRep Message Format
SubID NB_EraseRep is sent from receiver to PC. It is one of the reply messages for
NB_ProgCmd. Receiver sends out this message after it erases Flash, which typically takes 1 to
3 seconds. This reply is sent by the PIO cold bootloader, but not the warm bootloader.
Table 49: SubID NB_EraseRep Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0
Address
U32
Enum NB_EraseRep.
1.17.2.14 SubID NB_WriteFRep Message Format
SubID NB_WriteFRep is sent from receiver to PC. It is one of the reply messages for
NB_ProgCmd. Receiver sends out this message after it writes new data to Flash, which can
take upto 20 seconds, depending on program size.
Table 50: SubID NB_WriteFRep Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0
Address
U32
Enum NB_WriteFRep.
1.17.2.15 SubID NB_Working Message Format
SubID NB_Working is sent from receiver to PC. It is one of the reply messages for
NB_ProgCmd. Receiver sends out this message at approximately 1 Hz rate when receiver is
erasing Flash or writing data to Flash. It is used to keep PC from timing out because erasing
and writing data to flash could take upto 20 seconds.This message is sent by the PIO cold
bootloader but not the warm bootloader.
Table 51: SubID NB_Working Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1
Valid count U16 0
Address U32 0
Enum NB_Working.
1.17.2.16 SubID NB_ResetCmd Message Format
SubID NB_ResetCmd is sent from PC to receiver. It is used to tell the PIO cold bootloader to do
a software reset after bootloading. The warm bootloader does not require this command, as it
resets automatically after reprogramming the flash.
69
Page 70

Onyx Technical Reference Manual Rev. A
Table 52: SubID NB_ResetCmd Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 0
Valid count U16 0
Address U32 0
Enum NB_ResetCmd.
1.17.2.17 SubID NB_ResetRep Message
The SubID NB_ResetRep is sent by the cold bootloader in response to NB_ResetCmd. The
warm bootloader does not use the NB_ResetCmd, so it does not issue the response.
Table 53: SubID NB_ResetRep Format
Field Data Type Value and Description
Function Type SubID U08
Pass or Fail U08 1= pass, 0 = fail.
Valid count U16 0
Address U32 0
Enum NB_ResetRep.
1.26.3 PIO Software Loading Sequence
The PIO software loading sequence is similar to GNSS board software loading described in the
message protocol.
70
Page 71
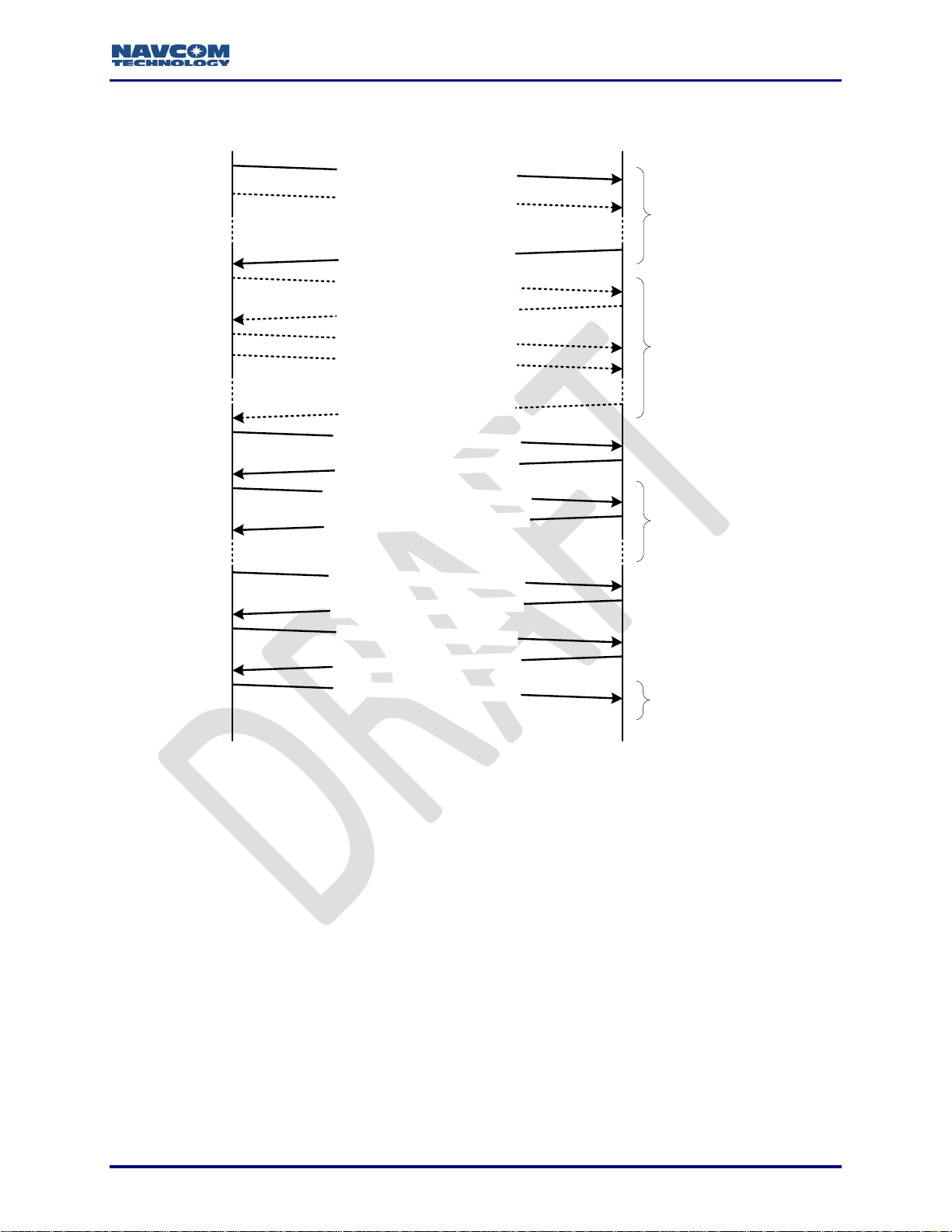
Onyx Technical Reference Manual Rev. A
User Application
Receiver
[
BOOTLOADPIOB
]NB_PingCmd
[BOOTLOADPIOB]NB_PingCmd
[
BOOTLOADPIOB
]
NB
_
PingRep
[
BOOTLOADPIOB]NB_BaudCmd
[
BOOTLOADPIOB
]
NB
_
BaudRep
Note
1
Note 2
[
BOOTLOADPIOB]NB_PingCmd
[BOOTLOADPIOB]NB_PingCmd
[
BOOTLOADPIOB
]
NB
_
PingRep
[
BOOTLOADPIOB
]
NB_SetupCmd
[
BOOTLOADPIOB
]
NB
_
SetupRep
[
BOOTLOADPIOB
]
NB_LoadDataCmd
[
BOOTLOADPIOB
]
NB
_
LoadDataRep
Note 3
[
BOOTLOADPIOB
]
NB_ChkCrcCmd
[
BOOTLOADPIOB
]
NB
_
ChkCrcRep
[
BOOTLOADPIOB
]
NB_ProgCmd
[
BOOTLOADPIOB
]
NB
_
WriteFRep
[
BOOTLOADPIOB
]
NB
_ResetCmd
Note 4
PC should send NB_PingCmd at a rate of 1-2 Hz until a reply is received.
Changing the port baud rate is optional, and is ignored if downloading using the
Ethernet or Bluetooth
The PIO firmware download supports a sliding window if the user choses to use it.
If a NB_LoadDataCmd is not acknowleged, the user must retransmit all messages
in the window. For high speed ports (Ethernet, Bluetooth
should be kept small.
The NB_ResetCmd and NB_ResetRsp are used by the cold bootloader but not the
warm bootloader. If desired, the user may send NB_PingCmd messages to detect
when the PIO board has completed the reset sequence.
®
ports.
®
, USB), the window
71
Page 72
Onyx Technical Reference Manual Rev. A
Requests Bluetooth® device address (6-byte string of hex numbers in the
format “xx.xx.xx.xx. xx.xx”)
Disconnects the Bluetooth® device and makes it available to pair with
another device.
This keyword, used for the SF-3040, clears the stored port connection
information.
1.18 BTSET
SF-5050 Onyx
This command allows a user to set parameters in the Bluetooth® module.
Command:
[BTSET] RESET | ON | OFF | PIN | DELPIN | SETPIN, <pin> | ADDR | DISCONNECT|
CLEARMAP
Table 54: [BTSET] Command Action Keywords (Subcommands)
Keyword Profile Action
®
RESET K
ON K Turns on Bluetooth® (causes a software reset of Bluetooth® firmware)
OFF K
PIN K Requests the system PIN code
DELPIN K Deletes the system PIN code (encryption no longer available)
SETPIN K
ADDR K
DISCONNECT K
CLEARMAP K
Resets Bluetooth
the connection and reboot
Turns off Bluetooth
and no text message is output)
Sets the PIN code (also known as passkey code) for authorized
connections. Maximun length of the BT PIN is 16.
(software reset); Causes the Bluetooth® device to drop
®
(Bluetooth® enters “deep sleep” power-saving mode
The Bluetooth
®
module can be in two modes:
• Command Mode – in this mode, the module receives commands (e.g., SETPIN,
DELPIN).
• Data Mode – in this mode, the module has an active data connection with a
connected device; it does not receive commands because commands would be
interpreted as data that need to be passed to the connected device.
When the Bluetooth
®
module is in “data mode,” the keywords are
ON/OFF/DISCONNECT. The remaining keywords return NAK - “BT module in data
mode”.
Examples:
[BTSET]ON
Turns on Bluetooth
®
Default: ON
®
Turning on Bluetooth
is associated with a software reset of the Bluetooth® firmware, so the
system returns the same output as with the RESET command. When Bluetooth
in-range Bluetooth
®
electronic device should be able to detect the existence of the system.
Examples continued on next page…
®
is ON, another
72
Page 73

Onyx Technical Reference Manual Rev. A
[BTSET]RESET
Resets Bluetooth
®
firmware (sample output: “Copyright© 2003-2008 Bluegiga
Technologies, Inc.”)
[BTSET]OFF
Turns off Bluetooth
When the Bluetooth
®
commands sent to the Bluetooth
again). No text message is output. Turning off Bluetooth
®
is OFF, its interface with the UART on the PIO board is disabled and all
®
module are not accepted by the module (until it is turned on
®
puts the module into “deep sleep”
power-saving mode, thus making the RF invisible, and another in-range Bluetooth
device cannot detect the existence of the system.
[BTSET] PIN
Requests PIN code (sample output: “SET BT AUTH # 1234”)
Returns the PIN code in the system, if one exists; otherwise, returns “No Pin”.
[BTSET]SETPIN, “123456”
Sets Bluetooth
®
PIN code for authorized connections (sample output: “SET BT AUTH #
1234”)
[BTSET]DELPIN
Deletes PIN code (sample output: “PIN Deleted”)
When the PIN code is deleted, no encryption can be used.
®
electronic
Default: No PIN
Any printable character can serve as a PIN. The maximum number of PIN characters is 31.
[BTSET]ADDR
Requests Bluetooth
®
device address (the 6-byte string of hex numbers in the format
“xx:xx:xx:xx:xx:xx” , e. g., “00:07:80:81:66:fe”)
[BTSET]DISCONNECT
Disconnects Bluetooth
®
from the system (forces Bluetooth® module to drop all
connections)
®
The DISCONNECT command can only be issued from non-Bluetooth
ports.
73
Page 74

Onyx Technical Reference Manual Rev. A
1.19 CANCELSFLICENSE
SF-5050 Onyx
This command is used to cancel the current StarFire license. The receiver tim e at the t i me of
cancellation is used as the cancellation date.
Command:
[CANCELSFLICENSE]
This action cancels the subscription to StarFire signal service. Users need to
contact their dealer or NavCom to replace the license.
This command requires the receiver to be tracking GPS satellites at the moment
the command is entered.
74
Page 75

Onyx Technical Reference Manual Rev. A
1.20 CHECKCRC
SF-5050 Onyx
This command is used to check the CRC of the specified code (or all of the codes) in the
flash. It calls the same CRC algorithm that runs prior to executing a [RESET] command. The
CRC is calculated over the code’s image in the flash, not the RAM, even if the command is
called while running from the debugger.
Command:
Parameter Definition
code_id K
[CHECKCRC] {code_id}
Indicates which code or codes to check. Choices are BOOT1, BOOT2,
NAV, and ALL to check all four codes. If no keyword is specified, ALL is
assumed.
Default: ALL
Examples:
[CHECKCRC] ALL
BOOT1 passed, code is OK
BOOT2 passed, code is OK
NAV failed, need to reprogram flash
Use the keyword ALL to check all four codes with a single command. In this case, there is an
error somewhere in the NAV code image.
ALL is also the default if no keyword is specified.
[CHECKCRC]
>[CHECKCRC] BOOT1 passed, code is OK
>[CHECKCRC] BOOT2 passed, code is OK
>[CHECKCRC] NAV passed, co de is OK
75
Page 76

Onyx Technical Reference Manual Rev. A
1.21 COLDSTART
SF-5050 Onyx
This command is used to do a receiver Cold Start. After receiving this command, the receiver
erases the position, ephemeris, almanac (GPS and SBAS), time stored in NVRAM; invalidates
real-time clock; and restarts.
Even though the almanac in NVRAM is erased, there is still a hard-coded almanac in the
receiver firmware.
Command:
Parameter Definition
DEFAULT_ALM K Keyword: DEFAULTALM will use the default hard-coded almanac after reset.
Default: [COLDSTART]
[COLDSTART] {DEFAULTALM}
The [COLDSTART] command sent without a parameter will not use the hard-coded
almanac after reset
Examples:
[COLDSTART]
[COLDSTART] DEFALTALM
Runs the hard-coded almanac after reset
76
Page 77

Onyx Technical Reference Manual Rev. A
1.22 CONFIGGFA
SF-5050 Onyx
This command can be used to change those parameters used in NMEA GFA message: KH, KV,
Selected Accuracy Level, HAL.
Command:
Parameter Definition
KH F K for HPL
KV F K for VPL
HAL F Horizontal Alert Level
SAL F Selected Accuracy Level
[CONFIGGSA] {KH, KV, HAL, SAL}
Default: KH = 4.0
K
= 3.5
V
HAL = 25.0
SAL = 10.0
77
Page 78

Onyx Technical Reference Manual Rev. A
WGS84 (G1762)1
1. ITRF2008 to ITRF2005
2. ITRF2005 to WGS84 (G1150)
1.23 DATUM ASCII
SF-5050 Onyx
This command allows a user to check the current datum (a reference surface to be used in
defining the 3D coordinates of a position) or to set a specific datum to be used as the position
for all PVT data output.
1.36.1Reference Frame at Default State
At default (when a user does not specify any particular reference frame), the output of
the navigation position (i.e., in the PVT1B message) is the data in the default frame.
In this state, there will be no datum transformation to the position data. The navigation
library currently provides the solution in one of two reference frames (data), WGS84
(G1762) or ITRF2008 depending on the navingation mode. Refer to Table 189 for the
datum used in the solution.
1.36.2 Reference Frame at Non-Default State
When a user selects a non-default datum, an additional transformation process takes
place at the navigation library level to transform the solution data into the user-selected
target datum. The following table lists the transformation(s) undertaken to transform the
default datum to a user-specified datum.
Datum at the Default State Transformation Solution in Datum
Direct User-Specified
ITRF2008 (StarFire related
modes)
Direct GDA942
Direct User-Specified
Direct
GDA94
WFS84 (G1150)
The current realization of the WGS84 reference frame is designated as WGS 84
(G1762) since Oct 16 2014. WGS 84 (G1762) closely aligns with ITRF2008 frame.
No transformation is needed between WGS84(G1762) and ITRF2008.
info.nga.mil/GandG/publications/NGA_STND_0036_1_0_0_WGS84/NGA.STND.00
36_1.0.0_WGS84.pdf
http://earth-
Because WGS84 (G1762) is aligned at the centimeter level to the ITRF2008, one
transformation matrix is used for transforming ITRF2008 and WGS84 (G1762) to
GDA94. Apply Dawson and Woods (2010) methodology to transform coordinates
between GDA94 and WGS84/ITRF.
http://www.icsm.gov.au/gda/gda-v_2.4.pdf
http://www.ga.gov.au/webtemp/image_cache/GA19050.pdf
78
Page 79

Onyx Technical Reference Manual Rev. A
1.23.4 Special Considerations for the RTCM and RTK-Based Solutions
These are situations in the base and rover receiver setups, in which the rover outputs
the position that is relative to the base position. The reference frame used in solutions
from the rover is made consistent with the data it receives from the base. In other
words, the base receiver dictates the solution type it outputs, as well as the solution type
in the rover receivers who receive the correction from the base. User who sets up the
rover is advised to be cautious and made aware of possible effect in the output position
accuracy if he wants to select a non-default datum on the rover.
Selecting a non-default datum on the rover can affect the accuracy of the output
position. If the user inputs a user datum at the base, the rover should not apply a
local datum transformation as this will cause the rover to have applied the datum
shift twice (once at the base and once at the rover). In this scenario, the rover is
positioning on the base’s locally corrected datum. If the base’s position is not
transformed to the local datum, then the rover must apply a datum transform to
achieve a local position. The best practice is to position the rover on a known
monument and validate the position accuracy of the receiver prior to positioning
field work. If the position is in error, validate that the transform settings are
correct.
1.23.5 Command Format and Usage
The datum can be provided by the system (built-in datum), or it can be defined by a
user, in which case the user supplies all parameters in the specific format from the
command line.
Command:
Parameter Definition
DEFAULT
WGS84
GDA94
USERDATUM
[DATUM] [DATUM_SELECTION], [PARAMETER1, ..., [PARAMETER17]
Default datum of the system (ITRF2008 or WGS84_G1762).
No [PARAMETER_LIST] fields
Transform StarFire ITRF 2008 datum to WGS84 G1150. (Only for StarFire mode, if the
default datum is WGS84_G1762)
No [PARAMETER_LIST] fields required.
Geocentric datum of Australia (1994).
No [PARAMETER_LIST] fields
User-defined datum – the user provides the parameters in predefined format,
[PARAMETER1], …,[PARAMETER17]
Only one user datum can be stored at one time. Entering a new user datum
overwrites that which is currently stored.
[PARAMETER_LIST] Command for the parameter list for user-defined datum.
79
Page 80
Onyx Technical Reference Manual Rev. A
Overall
Sequence #
data type)
Table 55: Parameter List for User-Defined Datum
Value Data Type Valid Range Remarks
Keyword USERDATUM Text String
double*
1 Semi-major axis (meters)
2 Inverse-flat integer -9999 to 9999
3 Source datum refer enc e year double 1980 to 9999
4 Translation in x (meters) double -1000 to 1000 Used in 3,7,14
5 Translation in y (meters) double -1000 to 1000
6 Translation in z (meter s) double -1000 to 1000
7 Rotation in x (arc-sec) double -0.02 to 0.02
8 Rotation in y (arc-sec) double -0.02 to 0.02
9 Rotation in z (arc-sec) double -0.02 to 0.02
10 Translation scale (ppm (10-6)) double -0.02 to 0.02
11
12
13
14
Translation rate in x
(meter/year)
Translation rate in y
(meter/year)
Translation rate in z
(meter/year)
Rotation rate in x (arcsec/year)
* double =
decimal
number (R64
double
double
double
double
6377137
to 6379137
-0.02 to 0.02
-0.02 to 0.02
-0.02 to 0.02
-0.02 to 0.02
Ellipsoid Model
parameter
transformation
Used in 7, 14
parameter
transformation
Used in 14
parameter
transformation
15
16
17
Rotation rate in y
(arc-sec/year)
Rotation rate in z
(arc-sec/year)
Rotation rate scale
(ppm/year; 10
-6
/year)
double
double
double
-0.02 to 0.02
-0.02 to 0.02
-0.02 to 0.02
The parameters contain the following types of information and determine the type of
transformation model to be used:
1. Ellipsoid model
2. 3-parameter model
3. 7-parameter model
4. 14-parameter model
80
Page 81

Only one user datum can be stored at one time. Entering a new user
1
translation in x (in meters)
-0.0761
2
translation in y (in meters)
-0.01
3
translation in z (in meters)
0.04
datum overwrites the one which is currently stored.
Examples:
[DATUM]
Returns the current datum mode and the values of the basic datum parameter
[DATUM]GDA94
Sets the new datum to Geocentric Datum of Australia (1994)
[DATUM]USERDATUM, [PARAMETER1], …,[PARAMETER17]
Sets the datum to a user-defined datum; the user supplies the datum specifications as
well as the transformation model in the form of a list of parameters.
The user must provide the following data block:
1. Ellipsoid model:
2. Transformation models
• 3 parameters (required minimum list for user-defined datum)
• 7 parameters (optional extended parameter list – in addition to the 3-parameter model)
Onyx Technical Reference Manual Rev. A
• 14 parameters (optional extended list of parameters – in addition to the 7-parameter
model)
In the examples below, the datum specifications from GDA94 (with simplification of the data
precision length) are used to demonstrate the user-input syntax for datum transformation.
1.23.6 Ellipsoid Model
Table 56: User-Defined Ellipsoid Model (with Sample Values)
Definition User-Defined Values
Semi-major Axis (a) 6378137.0e0*
Inverse-flat (a/(a-b) 298.2572221010
Source Datum Reference Year 2000
* The user-defined value must be written in scientific notation. A number in scientific
notation is written as the product of a number (integer or decimal) and a power of 10. The
number has one digit to the left of the decimal point. The power of ten indicates how
many places the decimal point was moved (e.g., the scientific notation equivalent of
0.011 is 1.1.e
-02,
and for 0.125 it is 1.25e-1).
The ellipsoid model parameters are mandatory in any transformation model.
1.23.7 Transformation Models
1.23.7.1 Three-Parameter Transformation
Value Order # Parameter User-Defined Values
81
Table 57: 3-Parameter Model Transformation (with Sample Values)
Page 82
Example:
[DATUM] USERDATUM, 6378137.0e0, 298.2572221010,2000,-0.0761,-0.01,0.04
1.23.7.2 Seven-Parameter Transformation
Table 58: 7-Parameter Model Transformation (with Sample Values)
Value Order # Parameter User-Defined Values
1 – 3 3-parameter model 3-parameter model translation values
4 rotation in x (in arc-sec) 0.008
5 rotation in y (in arc-sec) 0.009
6 rotation in z (in arc-sec) 0.009
7 Translation Scale (in ppm) 7.935e-03
Example:
[DATUM] USERDATUM, 6378137.0e0, 298.2572221010,2000,-
0.0761,0.01,0.04,0.008,0.009,0.009,7.935E-03
1.23.7.3 Fourteen-Parameter Transformation
Onyx Technical Reference Manual Rev. A
Table 59: 14-Parameter Model Transformation (with Sample Values)
Value Order # Parameter User-Defined Values
1 – 7 7-parameter model 7-parameter model translati on values
8 translation rate in x (in meter/year) 1.1e-02
9 translation rate in y (in meter/year) -4.5e-03
10 translation rate in z (in meter/year) -1.74e-02
11 rotation rate in x (in arc-sec / year) 1.034e-3
12 rotation rate in y (in arc-sec / year) 0.671e-03
13 rotation rate in z (in arc-sec / year) 1.039e-03
14 Rotate rate scale (in ppm / year) -0.538e-03
Examples:
[DATUM] USERDATUM, 6378137.0e0, 298.2572221010,2000,-0.0761,-
0.01,0.04,0.008,0.009,0.009,7.935E-03,1.1e-02,-4.5e-03,-1.74e-02,1.034e-02,0.671e-
03,1.039e-03,-0.538e-03
[DATUM]USERDATUM,6378137.0,298.2572220972,2000,0.0001,-0.0008,-0.0058,0,0,0,
0.0004,-0.0002,0.0001,-0.0018,0,0,0,0.00008
82
Page 83

Onyx Technical Reference Manual Rev. A
1.24 DEFINESFSAT (ASCII)
SF-5050 Onyx
This command is used to define/delete a user-defined StarFire satellite. Entering this command
with no arguments displays the current user-defined satellite.
Command:
Parameter Definition
Define_delete K Keyword (DEFINE, DELETE, NONE)
Satellite_id I
Frequency F Satellite frequency in kHz (1525000-1560000)
[DEFINESFSAT] define_delete, {satellite_id}, {frequency}
Satellite ID number (integer) (320 to 680); cannot be the same as an OTA
listed Satellite
Default: No user-defined satellite (The satellite ID is usually 500+ the longitudinal satellite
axis location.
Examples:
[DEFINESFSAT] define, 670, 1560000
Defines a user-defined StarFire satellite at E 170°
83
Page 84

Onyx Technical Reference Manual Rev. A
Turns this functionality ON or OFF
1.25 DNSOVERRIDE
SF-5050 Onyx
This command allows the user to override the DNS IP addresses in ETHCONFIG with other
DNS IPs. If this command is turned on, then the system will use the DNS IPs specified by
DNSOVERRIDE. If turned off, then the system will use the DNS IPs specified by ETHCONFIG.
The purpose of this command is to allow the user to hardcode DNS IPs of their choice
regardless of what the DHCP server may assign as DNS IPs.
Command:
Parameter Definition
ON_OFF K
DNS1 K DNS Server IP in xx.xx.xx.xx format
DNS2 K DNS Server IP in xx.xx.xx.xx format
[DNSOVERRIDE] ON_OFF, DNS1, DNS2
Default: [DNSOVERRIDE] OFF, 0.0.0.0, 0.0.0.0
Examples:
[ETHCONFIG]AUTO, 192.168.1.100, 255.255.255.0, 192.168.1.1, 2.2.2.2, 3.3.3.3
[DNSOVERRIDE]OFF, 4.4.4.4, 5.5.5.5
The DNS IPs that will be used with this configuration are 2.2.2.2 and 3.3.3.3
[ETHCONFIG]AUTO, 192.168.1.100, 255.255.255.0, 192.168.1.1, 2.2.2.2, 3.3.3.3
[DNSOVERRIDE]ON, 4.4.4.4, 5.5.5.5
The DNS IPs that will be used with this configuration are 4.4.4.4 and 5.5.5.5.
[ETHCONFIG]MANUAL, 192.168.1.100, 255.255.255.0, 192.168.1.1, 2.2.2.2, 3.3.3.3
[DNSOVERRIDE]OFF, 4.4.4.4, 5.5.5.5
The DNS IPs that will be used with this configuration are 2.2.2.2 and 3.3.3.3
[ETHCONFIG]MANUAL, 192.168.1.100, 255.255.255.0, 192.168.1.1, 2.2.2.2, 3.3.3.3
[DNSOVERRIDE]ON, 4.4.4.4, 5.5.5.5
The DNS IPs that will be used with this configuration are 4.4.4.4 and 5.5.5.5
84
Page 85

Onyx Technical Reference Manual Rev. A
[DYNAMICS] dynamic_mode, {rtk_dynamic_mode}, {sf_dynamic_mode},
Keyword (STATIC/LOW/MEDIUM/HIGH/USER). This is the receiver overall
and velocity smoothing.
1.26 DYNAMICS (ASCII)
SF-5050 Onyx
This command is used for specifying receiver dynamics. The setting affects the RTK rover
dynamic, the StarFire dynamic, and the velocity smoothing settings.
Command:
Parameter Definition
Dynamic_mode K
rtk_dynamic_mode K Keyword (STATIC/LOW/MEDIUM/HIGH). RTK rover dynamic model used in
sf_dynamic_mode K Keyword (STATIC/LOW/MEDIUM/HIGH). StarFire dynamic model used in
Velocity_smoothing K Keyword (ON/OFF). When velocity smoothing option is on, the calculated
{velocity_smoothing}
dynamic setting. When user specifies dynamic_mode as STATIC, LOW,
MEDIUM or HIGH, the receiver will use the build-in settings in Table 6-52 for
RTK rover, StarFire dynamic and velocity smoothing. In this case, no additional
parameters are needed. When user specify dynamic mode as USER,
additional parameters can be added to configure RTK rover, StarFire dynamic
navigation
navigation
velocity will be smoothed with a window of 1second. The smoothed velocity
has smaller noise but can only be used in static or low dynamic conditions.
Table 60: Dynamic Modes Keywords Description
Keyword RTK Rover and StarFire Dynamic Model
Static
Keyword that configures RTK rover and SF mode to use static dynamic
constraints in navigation
Low
Medium
High
Keyword that configures RTK rover and SF mode to use low dynamic model in
navigation. It achieves the best navigation performance in near-static mode.
Keyword that configures RTK rover and SF mode to use medium dynamic model
in navigation. It achieves the best navigation performance in normal dynamic
conditions.
Keyword that configures RTK rover and SF mode to use high dynamic model in
navigation. It achieves the best navigation performance when the platform
experiences high accelerations.
85
Page 86
Onyx Technical Reference Manual Rev. A
Highway <100 mph
Table 61: Dynamic Modes Mapping and Applications
Dynamic
Mode
Static Static land survey ~ 0 mph STATIC STATIC OFF
Low Offshore Survey <5 mph LOW LOW OFF
Medium
High Aerial platform >100 mph HIGH HIGH OFF
Typical Application RTK Rover
Dynamic Mode
MEDIUM MEDIUM OFF
SF
Dynamic
Mode
Velocity
Smoothing
ON (default)
ON (default)
Default: MEDIUM
The settings in this table assume that the receiver is navigating at a rate of 1 Hz. As
a rule of thumb, the higher the rate at which the receiver navigates, the higher the
dynamics the settings can accommodate.
Examples:
[DYNAMICS] STATIC
Sets RTK dynamics to static
[DYNAMICS]USER, LOW,, OFF
Sets RTK dynamics to low and turns off velocity smoothing. Leaves StarFire dynamic
unchanged.
86
Page 87
Onyx Technical Reference Manual Rev. A
1.27 ENABLEALL
SF-5050 Onyx
This command is used to enable all satellites or all ASIC channels. If any PRNs are currently
disabled, they will be enabled and will be searched for, when visible. If any channels are
currently disabled, they will be enabled and can be used for acquisition and/or tracking of
satellites.
Command:
Parameter Definition
type K Keyword (SAT, CH); SAT for enabling all satellites, CH for enabling all channels
[ENABLEALL] type
Examples:
[ENABLEALL] SAT
Enables all satellites
[ENABLEALL] CH
Enables all ASIC channels
87
Page 88
Onyx Technical Reference Manual Rev. A
1.28 ENABLEGEOFENCE
SF-5050 Onyx
This command is used to enable and disable SBAS (WAAS, EGNOS, …) Geofencing.
Command:
Parameter Definition
ON K Keyword that enables Geofencing
OFF K Keyword that ignores Geofencing
[ENABLEGEOFENCE] on_off
Default: ON
Examples:
[ENABLEGEOFENCE] off
This allows the user to accept potential improved positioning over autonomous GNSS;
however, the positioning accuracy is expected to be worse than within the prescribed
geofence area. The user accepts the added positioning error without prejudice against
the manufacturer.
[ENABLEQUICKSTART] ON
SBAS Geofrencing is enabled (default). Positioning accuracy should meet
manufacturer’s specifications, if all of the operating parameters are otherwise normal.
SBAS geofencing should be On by default to utilize the broadcast geofence to prevent
users from getting position errors reception in areas outside the geofence. If users wish
to accept the added positioning risk when operating outside the geofence error, they can
purposely set the geofe nce to Off.
88
Page 89

Onyx Technical Reference Manual Rev. A
1.29 ENABLERTCM2.3
SF-5050 Onyx
The command is used to set rover to accept RTCM 2.3 / 2.2 code corrections.
Command:
Parameter Definition
ON K Keyword that enables RTCM 2.3
OFF K Keyword that ignores RTCM 2.2
[ENABLERTCM2.3] ON_OFF
Default: ON
Examples:
[ENABLERTCM2.3] on
Configures Rover to accept RTCM2.3 corrections.
[ENABLERTCM2.3] off
Configures Rover to ignore RTCM2.2 corrections.
89
Page 90

Onyx Technical Reference Manual Rev. A
1.30 ERASEALM
SF-5050 Onyx
This command erases the satellite almanac data stored in non-volatile memory.
Command:
Parameter Definition
type K Satellite type (keyword) (ALL, GPS, SBAS, STARFIRE, GLONASS, GALILEO)
[ERASEALM] {type}
Default: ALL
T his command is not used during normal operation of the receiver. It will cause
all almanac data to be discarded from non-volatile memory. It will take the
receiver 12.5 minutes to collect full almanac information data again.
Examples:
[ERASEALM] GLONASS
Erases the GLONASS almanac
90
Page 91

Onyx Technical Reference Manual Rev. A
1.31 ERASEEPH
SF-5050 Onyx
Description: Clears the ephemeris data stored in non-volatile memory.
Command:
Parameter Definition
keyword K Satellite type (ALL, GPS, SBAS, GLONASS, GALILEO) If empty, it defaults to “ALL”.
[ERASEEPH] {type}
Default: ALL
T his command is not used during normal operation of the receiver. It will cause
all ephemeris data to be discarded from non-volatile memory. Ephemeris data is
broadcast by each SV every 30 seconds.
Examples:
[ERASEEPH] GLONASS
Erases the GLONASS ephemeris data
91
Page 92

Onyx Technical Reference Manual Rev. A
1.32 ETHCONFIG
SF-5050 Onyx
This command specifies the Ethernet port IP settings (Internet IP address, network mask,
default gateway, and DNS servers).
Entering the command without parameters displays the current settings. This is especially
useful in dynamic IP mode (AUTO) to reveal the IP settings assigned by a DHCP server.
IP addresses and the network mask are entered in the form of “a.b.c.d”, where a,b,c, and d
are decimal integers in the range of 0-255 (e.g., 192.168.0.2).
The local IP address is the destination address for any incoming connections (EVCOM, HTTP,
NTRIP, etc.) and must be unique for each unit on the same network.
Command:
Parameter Definition
IP mode K
IP address K Specifies the local IP address of the unit.
Network mask K Identifies the network part of the IP address, as a.b.c.d (range: 1-255 for each)
Gateway
address
DNS1 K
DNS2 K
[ETHCONFIG] IP mode, IP address, network mask, gateway address, DNS1, DNS2
This keyword may be either “MANUAL” for static IP configuration or “AUTO” for
dynamic IP configuration using a DHCP server.
When set to “AUTO”, other command parameters are not used.
Identifies the IP address of the default Internet Gateway (0.0.0.0= no def ault gat e w a y).
The gateway must be on the local network (i.e. the network part of the IP address must
K
match the network part of the IP address (the first IP address argument in this
command).
Specifies the IP address of a DNS server. If the server IP address is not on the same
network as the local IP address, the DNS queries will be sent through the default
gateway.In the absence of a default gateway, the DNS query will fail.
Specifies the IP address of an alternate DNS server. If a DNS query to the first (DNS1)
server fails, an attempt is made to use the DNS2 server address.
Examples:
[ETHCONFIG] MANUAL, 192.168.0.2, 255.255.255.0, 192.168.0.1, 204.54.87.20,
204.54.87.39
Sets local system IP address to 192.168.0.2, network mask to 255.255.255.0, gateway
IP address to 192.168.0.1, DNS server 1 IP address to 204.54.87.20, and DNS server 2
IP address to 204.54.87.39
[ETHCONFIG] MANUAL, 0.0.0.0, 0.0.0.0, 0.0.0.0, 0.0.0.0, 0.0.0.0
Disables the Ethernet port
[ETHCONFIG] AUTO, 0.0.0.0, 0.0.0.0, 0.0.0.0, 0.0.0.0, 0.0.0.0
Configures the Ethernet port to query a DHCP server to obtain the IP settings
[ETHCONFIG]
[ETHCONFIG]AUTO, 192.168.0.101, 255.255.255.0, 192.168.0.1, 204.54.87.20,
204.54.87.39
Displays current settings
92
Page 93

Onyx Technical Reference Manual Rev. A
1.33 ETHSTAT
SF-5050 Onyx
This is a status command that does not accept any arguments but provides the current ether
status information.
The command returns the following information:
1. Mac Address of the unit
2. Status of the Ethernet link (LINK_UP, LINK_DOWN)
3. Current port speed (100Mbs, 10Mbs)
4. Current duplex setting (FULL_DUPLEX, HALF_DUPLEX)
5. Current status of the cable, whether it is a cross-over cable (MDI-X) or not (MDI, MDI-X)
Examples:
[ETHSTAT]
[ETHSTAT] MAC 00:07:E3:10:66:30, LINK_UP, 100Mbs, FULL_DUPLEX, MDI-X
93
Page 94

Onyx Technical Reference Manual Rev. A
1.34 ETHVCOM
SF-5050 Onyx
This command enables or disables the Ethernet Virtual COM port server application, and may
also establish an EVCOM connection with a specific remote user or terminate an existing
connection.
An Ethernet Virtual Com port (EVCOM) is similar to an ASYNC serial com port and supports the
same set of commands/responses as a serial COM port. It operates in a server/client mode to
provide this service to remote clients.
The data stream is encapsulated in IP packets and can be configured to use either the UDP or
TCP transport protocol. An IP packet may contain one or more complete message(s) or
response(s), a fragment of a message, or any combination of these. It is simply a stream of data
that is arbitrarily segmented into one or more UDP or TCP packets.
There are four logical ports that may be used by the EVCOM application (ETH1 – ETH8) for
scheduling messages or sending responses to received input commands. Each of the logical
ports can be individually configured for operation mode (TCP or UDP), IP port number,
scheduled messages, and remote endpoints (client applications), providing four independent
data streams.
ETHVCOM is a system command, and the setting is stored in system NVRAM.
An active UDP session will automatically be re-established if the SF-5050 is reset due to power
interruption.
This is not possible for a TCP mode connection except under special conditions
where the remote will be listening on the configured remote port. This essentially
reverses the server/client roles.
Entering this command without any arguments will display the current settings for all four logical
ports.
Command:
Parameter Definition
on_off K
Remote IP
address
Remote port I
[ETHVCOM] on_off, remote IP address, remote UDP/TCP port, mode, local
UDP/TCP port, logical port
Keyword that enables (ON) or disables (OFF) the virtual COM port functionality on
the logical port
In UDP2 mode, this specifies the IP address of the remote user the unit will respond
to. In a status message, this specifies which user the unit is connected to. If the
K
command is entered with an IP address of 0.0.0.0, the unit breaks any current
connection and listens for a new connection from any remote user.
In UDP2 mode, this specifies the port number of the remote user the unit will respond
to. In a status message, this specifies which user the unit is connected to. If the
remote IP address is non-zero, the remote port must also be non-zero.
Range: 0 – 65535. Normally, the remote port is determined by the incoming
UDP/TCP header source port. When configuring the port manually, keep in mind the
IANA has reserved ports 0 – 1023, and these ports should be avoided.
Keyword identifying ETHVCOM task transport protocol.
Mode K
UDP1: UDP with no “connection.” Any command responses, or any scheduled
output messages will be sent to the IP address and port of the sender of the last
received UDP datagram.
94
Page 95

UDP2: UDP witih pseudo session. See notes for description of a UDP “pseudo
Local port I
Onyx Technical Reference Manual Rev. A
session.”
TCP1: The connection operates as a normal TCP session with the exception
that if there is a send error, other than a re-transmission of a lost packet, then
the connection will be terminated, and the logical port will enter listen mode
for a new connection. This may happen if the remote client experiences a
power interruption, or some sort of network interruption.
TCP2: TCP session with keep-alive timeout.
If non-zero, specifies the local UDP/TCP port number the ETHVCOM task will listen
on (range : 1 – 65535). The IANA has reserved ports 0-1023 for specific purposes
(e.g. FTP, telnet, Web Servers, etc.) and is therefore avoided.
Logical port K
Default:
>[ETHVCOM]ON,0.0.0.0,0,UDP1,4361,ETH1
>[ETHVCOM]ON,0.0.0.0,0,UDP1,4362,ETH2
>[ETHVCOM]ON,0.0.0.0,0,UDP1,4363,ETH3
>[ETHVCOM]ON,0.0.0.0,0,UDP1,4364,ETH4
>[ETHVCOM]ON,0.0.0.0,0,UDP1,4365,ETH5
>[ETHVCOM]ON,0.0.0.0,0,UDP1,4366,ETH6
>[ETHVCOM]ON,0.0.0.0,0,UDP1,4367,ETH7
>[ETHVCOM]ON,0.0.0.0,0,UDP1,4368,ETH8
Examples:
[ETHVCOM] ON, 192.168.0.100, 5325, UDP2, 4361, ETH1
Instructs the unit to communicate only with a remote user whose IP address and port
number is 192.168.0.100:5325, using UDP2 mode. The local port number used to
communicate is 4361.
[ETHVCOM] ON, 0.0.0.0, 0, , , ETH2
Breaks current connection (if any) on ETH2, and enables the unit to listen for a
connection from the next remote unit that sends a packet to this unit. This is the proper
way for a remote user to terminate a UDP connection when in UDP2 mode. It causes the
unit to stop sending data and to listen for a new connection from another user. The
mode remains the same (UDP or TCP) as it was in the previous session.
ETH1, ETH2, ETH3, or up to ETH8. This is the logical port to be used by ETHVCOM
for requesting or scheduling messages.
[ETHVCOM] ON,0.0.0.0,0,UDP1
Breaks the current connection (if any) and listens for a UDP1 connection. Any scheduled
messages for this logical port will be silently discarded.
[ETHVCOM] OFF
Terminates any current connection and disables new EVCOM connections on this
logical port (ETH1…ETH4).
[ETHVCOM]
[ETHVCOM] ON, 192.168.0.100, 5042, TCP1, 4361, ETH1
[ETHVCOM] ON, 0.0.0.0, 0, TCP1, 4362, ETH2
[ETHVCOM] OFF, 0.0.0.0, 0, UDP1, 4363, ETH3
[ETHVCOM] ON, 46.153.12.73, 12345, UDP2, 4364, ETH4
Displays EVCOM logical port settings; in this case, ETH1 has an active TCP1 mode
95
Page 96

Onyx Technical Reference Manual Rev. A
EVCOM Port
Mode
Local IP Port
connection with remote user at IP 192.168.0.100, port 5042, to local TCP port 4361.
EVCOM logical port ETH2 is listening for a TCP1 mode connection from any remote
client. ETH3 is disabled. ETH4 has an active UDP2 mode connection with a remote
client at IP address 46.153.12.73, port 12345, on the SF-5050 UDP port 4364).
[ETHVCOM],,,,,ETH3
[ETHVCOM] ON,0.0.0.0,0,TCP1,4363,ETH3
Displays current settings for “ETH3” (Ethernet Virtual COM port enabled, no active
connection, listening on TCP port 4363 for a connection from any remote client).
Notes:
• If an ETHVCOM command is issued with no parameters, the status of all ETHVCOM
ports is displayed.
• If the only argument entered is the ETHVCOM port number, the status of that port is
displayed.
• If any argument is entered, but the ETHVCOM port number is not entered, the command
is assumed to be for the port the command was entered from. If this is not an
ETHVCOM port, an error message is displayed.
• The current values are used for any parameters not entered.
• Changing any of the EVCOM port s ettings causes a connected port to disconnect and
begin listening for a new connection.
• If the application is connected via TCP and the receiver resets, the application must try
to reconnect for the connection to be regained.
Table 61 lists the default settings (when no parameters are specified).
Table 62: Default Settings for Unspecified Parameters
ETH1 UDP2 4361
ETH2 UDP1 4362
ETH3 UDP2 4363
ETH4 UDP2 4364
ETH5 TCP1 4365
ETH6 TCP1 4366
ETH7 TCP2 4367
ETH8 TCP2 4368
1.34.1 ETHVCOM Application note
An EVCOM session may be established for several reasons, such as for a StarUtil connection,
high-speed data logging, or an OEM application interface.
Client application messages scheduled on an ONTIME basis using the [OUTPUT] command
must be unscheduled prior to closing the connection; otherwise, the next user opening a
connection to that logical port (ETH1 – ETH8) receives the messages even if they are
unrequested or unwanted. Additionally, generating unwanted messages causes unnecessary
overhead on the GNSS board and consumes unnecessary bandwidth on the SPI bus sending
the messages to the Power IO board (where they are silently discarded until the next EVCOM
96
Page 97

Onyx Technical Reference Manual Rev. A
connection is established).Cancel all output messages when the connection is first established,
and then schedule only the necessary messages.
UDP1 mode operates in a connection-less manner. Because there is no authentication, and the
port never establishes a “connection,” a remote client does not know when that port is already in
use by another remote client. A connection attempt by a second client diverts any output stream
set up by a previous client to the second remote client. To prevent this, a remote client should
not use UDP1 mode.
UDP2 mode (a UDP “pseudo session”) may be established when the ETHVCOM task is in the
“listening” mode (remote IP is 0.0.0.0 port 0). While in this listening mode, any messages
previously scheduled to be sent to the logical port are silently discarded. Once UDP2 mode is
established in this way, any datagrams received from any other UDP IP address/port are silently
discarded. The session should be terminated by the remote client by sending an
[ETHVCOM]ON,0.0.0.0,0 command, but it can also be terminated by entering that command on
any other port (e.g., a serial COM port or a different EVCOM port). The ETHVCOM task then
terminates the current “session” and enters its “listen” mode.
1.34.2 ETHVCOM Setup and Configuration Example
Enter the Virtual COM clear command for each port:
[ETHVCOM] ON, 0.0.0.0, 0, UDP1, 4361, ETH1
[ETHVCOM] ON, 0.0.0.0, 0, UDP1, 4362, ETH2
[ETHVCOM] ON, 0.0.0.0, 0, UDP2, 4363, ETH3
[ETHVCOM] ON, 0.0.0.0, 0, UDP2, 4364, ETH4
[ETHVCOM] ON, 0.0.0.0, 0, TCP1, 4365, ETH5
[ETHVCOM] ON, 0.0.0.0, 0, TCP1, 4366, ETH6
[ETHVCOM] ON, 0.0.0.0, 0, TCP2, 4367, ETH7
[ETHVCOM] ON, 0.0.0.0, 0, TCP2, 4368, ETH8
Enter the [ETHCONFIG] with no parameters to see the current settings, for example:
[ETHCONFIG]AUTO,192.168.0.2,255.255.254.0,192.168.0.1,D.D.D.D,d.d.d.d
If this value is entered, the Ethernet can drop offline. If it does you might be able to re-use this
IP address, that is; the Ethernet might or might not remember it for you.
If you specify MANUAL, the IP address will not change as the receiver drops offline.
[ETHCONFIG]MANUAL
Change manual to permanent:
[PROFILE]SAVEAS “PROFILENAME”
Power Cycle the receiver
If this does not work the first time, try these additional steps:
[ETHCONFIG]AUTO
[PROFILE] SAVEAS “BOB”
<power cycle the receiver>
....time passes – up to 30 seconds to acquire a DHCP address...
[ETHCONFIG]X.Y.Z.W
97
Page 98

Onyx Technical Reference Manual Rev. A
If the network is connected using a switch or a router, it sometimes helps to reset
that device so it flushes its internal addresses. If the receiver has dropped offline
because of an intervening power cycle, this normally brings the network back up.
The receiver firmware handles the process behind the scenes using its inter-board messaging
system. When the user enters [ETHCONFIG], the GNSS board remembers the input. If the
input is new or different from the previous input, the GNSS tells the PIO board by sending a
silent [PIOETHCONFIG] command with the entered parameters. When the profile is s a ved, it
remembers the new setting – if MANUAL, it comes up on that IP address, and if AUTO, it
queries the DHCP server for an IP address. In either case, when it gets the IP address and the
associated connection data, the PIO board sends a silent [ETHCONFIG] messages to the
GNSS board so the GNSS board can update its local data stores for the next time you type in
[ETHCONFIG].
98
Page 99
Onyx Technical Reference Manual Rev. A
1.35 EVENTLATCH
SF-5050 Onyx
This command is used to enable the operation of the event latch feature in the two ports
available and sets the event latch time tag to be triggered by the rising or falling edge of the
external pulse.
Command:
Parameter Definition
port K Keyword that selects the desired port (A, B)
on_off K Keyword that enables (ON) or disables (OFF) the event latch port
trigger K Keyword that sets the trigger edge of the pulse (RISING, FALLING)
[EVENTLATCH] port, on_off, trigger
Default: Latch A = OFF, RISING; Latch B = OFF, RISING
Examples:
[EVENTLATCH] A, ON, FALLING
Enables event latch A triggering on a rising edge.
[EVENTLATC H] B, OFF
Disables event latch B.
99
Page 100

Onyx Technical Reference Manual Rev. A
1.36 EVENTLATCHVOLTSEL
SF-5050 Onyx
This command is used to set the detect voltage capability for the Event Latch Input.
Command:
Parameter Definition
detect_
voltage
[EVENTLATCH VO LTSEL] detect_vo lt a ge
I Select the detect voltage capability (12 for 12V, 5 for 5V)
Default: 5
Examples:
[EVENTLATCHVOLTSEL]5
Set 5 Volts as the detect voltage.
[EVENTLATCHVOLTSEL]12
Set 12 Volts as the detect voltage.
100
 Loading...
Loading...