

Page 1

m
R
R
R
T
T
T
G
P
G
P
G
P
-
-
-
S
S
S
U
3
3
3
U
U
P
P
s
s
s
P
e
e
0
0
0
r
o
r
o
r
r
r
e
r
o
d
d
d
G
G
G
2
2
2
u
u
u
u
u
u
0
0
0
c
t
c
t
c
t
i
d
i
d
i
d
s
s
s
e
e
e
NavCom Technology, Inc.
123 West Torrance Blvd.
Suite 101
Redondo Beach, CA 90277
USA
Tel: +1 310.937.7460
Fax: +1 310.937.7464
sales@navcomtech.com
www.navcomtech.co
Page 2

Page 3

RT-3020 User Guide
Table of Contents
Table of Contents................................................. i
Notices.................................................................. ii
Chapter 1 Introduction.................................... 6
System Overview..................................................... 6
Applications .......................................................... 10
Unique Features .................................................... 10
Chapter 2 Interfacing..................................... 12
Electrical Power ..................................................... 12
Communication Ports............................................14
Indicator Panel ......................................................16
1 PPS..................................................................... 19
CAN Bus/Event...................................................... 19
Chapter 3 Installation .................................... 21
Tri-Mode Antenna ................................................. 21
GPS Sensor............................................................22
Communication Ports............................................26
GPS Antenna Connector........................................ 27
Chapter 4 Configuration................................ 29
Factory Default Settings.........................................29
Advanced Configuration Settings........................... 31
Chapter 5 Safety Instructions ........................ 32
FCC Notice............................................................ 32
Transport .............................................................. 32
Maintenance ......................................................... 33
External Power Source ........................................... 33
Safety First............................................................. 33
A
GPS
Sensor Technical Specifications ......... 35
RT-3020S and RT-3020M ...................................... 35
Built in Radio Performance..................................... 38
LED Display Functions (Default)............................. 39
B GPS Antenna Technical Specifications ...... 40
L1+L, L2 GPS Antenna ......................................... 40
Glossary............................................................. 42
i
Page 4
RT-3020 User Guide
Notices
RT-3020
P/N
Revision A November 2002
Serial Number:
Date Delivered:
GPS
Products User Guide
96-310005-3001
Copyright
2002 by NavCom Technology Inc.
All rights reserved. No part of this work or the computer
programs described herein may be reproduced or
stored or transmitted by any means, without the
written permission of the copyright holders. Translation
in any language is prohibited without the permission of
the copyright holders.
Trademarks
The ‘find your way’, ‘NavCom Globe’ and NAVCOM
TECHNOLOGY logos are trademarks of NavCom
Technology, Inc.
Deere & Company. All other product and brand names
are trademarks or registered trademarks of their
respective holders.
StarFire
is a registered trademark of
FCC Notice
This device complies with Part 15 of the FCC Rules.
Operation is subject to the following two conditions:
ii
Page 5
RT-3020 User Guide
(1) this device may not cause harmful interference, and
(2) this device must accept any interference received,
including interference that may cause undesired
operation.
User Notice
NAVCOM TECHNOLOGY, INC. SHALL NOT BE
RESPONSIBLE FOR ANY INACCURACIES, ERRORS, OR
OMISSIONS IN INFORMATION CONTAINED HEREIN,
INCLUDING, BUT NOT LIMITED TO, INFORMATION
OBTAINED FROM THIRD PARTY SOURCES, SUCH AS
PUBLICATIONS OF OTHER COMPANIES, THE PRESS, OR
COMPETITIVE DATA ORGANIZATIONS.
THIS PUBLICATION IS MADE AVAILABLE ON AN “AS IS”
BASIS AND NAVCOM TECHNOLOGY, INC.
SPECIFICALLY DISCLAIMS ALL ASSOCIATED
WARRANTIES, WHETHER EXPRESS OR IMPLIED. IN NO
EVENT WILL NAVCOM TECHNOLOGY, INC. BE LIABLE
FOR DIRECT, INDIRECT, SPECIAL, INCIDENTAL, OR
CONSEQUENTIAL DAMAGES IN CONNECTION WITH
THE USE OF OR RELIANCE ON THE MATERIAL
CONTAINED IN THIS PUBLICATION, EVEN IF ADVISED
OF THE POSSIBILITY OF SUCH DAMAGES. NAVCOM
TECHNOLOGY, INC. RESERVES THE RIGHT TO MAKE
IMPROVEMENTS OR CHANGES TO THIS PUBLICATION
AND THE PRODUCTS AND SERVICES HEREIN
DESCRIBED AT ANY TIME, WITHOUT NOTICE OR
OBLIGATION.
Limited Warranty
NavCom Technology, Inc., warrants that its products
will be free from defects in workmanship at the time of
delivery. Under this limited warranty parts found to be
defective or defects in workmanship will be repaired or
replaced at the discretion of NavCom Technology, Inc.,
iii
Page 6

RT-3020 User Guide
at no cost to the Buyer, provided that the Buyer returns
the defective product to NavCom Technology, Inc. in
the original supplied packaging and pays all
transportation charges, duties, and taxes associated
with the return of the product. Parts replaced during
the warranty period do not extend the period of the
basic limited warranty.
This provision does not extend to any NavCom
Technology, Inc. products, which have been subjected
to misuse, accident or improper installation,
maintenance or application, nor does it extend to
products repaired or altered outside the NavCom
Technology, Inc. production facility unless authorized in
writing by NavCom Technology, Inc.
THIS PROVISION IS EXPRESSLY ACCEPTED BY THE
BUYER IN LIEU OF ANY OR ALL OTHER AGREEMENTS,
STATEMENTS OR REPRESENTATIONS, EXPRESSED OR
IMPLIED, IN FACT OR IN LAW, INCLUDING THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND
FITNESS FOR A PARTICULAR PURPOSE AND OF ALL
DUTIES OR LIABILITIES OF NAVCOM TECHNOLOGY,
INC. TO THE BUYER ARISING OUT OF THE USE OF THE
GOODS, AND NO AGREEMENT OR UNDERSTANDING
VARYING OR EXTENDING THE SAME WILL BE BINDING
UPON NAVCOM TECHNOLOGY, INC. UNLESS IN
WRITING, SIGNED BY A DULY-AUTHORIZED OFFICER
OF NAVCOM TECHNOLOGY, INC.
This limited warranty period is one (1) year from date of
purchase.
iv
Page 7
RT-3020 User Guide
Global Positioning System
Selective availability (S/A
GPS
UTC
sensor.
2000 at 04:05
stated that present
The US Government may at any time end or change
operation of these satellites without warning.
The U.S. Department of Commerce Limits
Requirements state that all exportable
contain performance limitations so that they cannot be
used to threaten the security of the United States.
Access to satellite measurements and navigation results
will be limited from display and recordable output
when predetermined values of velocity and
exceeded. These threshold values are far in excess of
the normal and expected operational parameters of the
RT-3020
code) was disabled on 2nd May
. The United States government has
GPS
users do so at their own risk.
GPS
products
altitude
are
Use of this Document
This User Guide is intended to be used by someone
familiar with the concepts of
equipment.
GPS
and satellite surveying
Note indicates additional information to make better
use of the product
Indicates a caution, care, and/or safety situation,
Warning indicates potentially harmful situations.
Items that have been
acronym that can be found in the Glossary.
Revisions to this User Guide can be obtained in a digital
format from
support.navcomtech.com
ITALICIZED
v
indicate a term or
Page 8
RT-3020 User Guide
Chapter 1 Introduction
The RT-3020
to the precise positioning community who need a
cost-effective, high performance
unique receiver can transmit or receive corrections via
an onboard
GPS
sensor delivers unmatched accuracy
GPS
sensor. This
Spread Spectrum Radio (SSR)
.
System Overview
GPS
Sensor
The RT-3020 sensor consists of a 10frequency precision
channels for receiving
System (SBAS)
proprietary raw data as fast as 50Hz (optional) and
Position Velocity Time (PVT)
(optional) through two 115
software provides fast initialization. Testing shows that
the system resolves ambiguities at start-up or on
reacquisition of satellites typically within two seconds.
GPS
receiver with two additional
Satellite Based Augmentation
signals. The sensor can output
data as fast as 25Hz
kbps
channel
serial ports. The
dual
RTK
The RT-3020 has a built-in
providing an immediate solution for the system
integrator and real time surveyor. Utilizing the built in
radio for
communicate using NavCom’s highly efficient
proprietary
RTCM
simultaneously accept corrections for
(
WAAS/EGNOS
The RT-3020S is packaged for mobility. It can be used
for construction stakeout, boundary surveys, high order
control surveys and topographic surveys in rough
RTK
measurements, the receivers
RTK
format or other
and CMR. Additionally, the receivers
) assuring seamless position output.
Spread Spectrum Radio
RTK
formats, such as
DGPS
1-6
Page 9

RT-3020 User Guide
terrain. The sensor can be carried in a backpack with
the antenna either pole-mounted from the backpack or
on a survey pole with a single cable connection.
The RT-3020M is a
specifically designed for machine control applications in
construction, agriculture, mining and many other fields.
The RT-3020M is equipped with additional features
allowing interconnectivity with a wide variety of
antennas, vehicle data buses and other instrumentation
to suit specific applications and configurations. The RT3020M also has a 1
Event/
GPS
Our compact
performance and a stable
L2
5/8”
pole, tripod, or mast and is certified to 70,000’ feet.
CAN Bus
Antenna
. The robust housing assembly features a standard
BSW
thread for mounting directly to a surveyor’s
real- ime kinematic (RTK
t
PPS
output port and a combined
interface port.
GPS
antenna with excellent tracking
phase center
for
) sensor
GPS L1
Although rated to 70K feet, this antenna is not
designed for aircraft installations. Contact
sales@navcomtech.com
for aircraft solutions.
and
Controller
The RT-3020
external c
two
COM
This may be accomplished using an IBM compatible PC,
Tablet PC or
software program which implements the rich control
language defined for NavCom
User’s Guide of your
information.
GPS
sensor is designed for use with an
ontroller
ports.
solution connected via one of the
Personal Digital Assistant (PDA
GPS
products.
Controller
Solution for further
) and a
See
the
1-7
Page 10

RT-3020 User Guide
Included Items
Figure 1 RT-3020 Supplied Equipment
X RT-3020
(RT-3020S
(RT-3020M
Y Compact
P/N
82-001000-0004)
(
Z
GPS
Antenna Cable (
1-8
GPS
sensor
P/N
92-310058-3001)
P/N
92-310058-3002)
L1/L2 GPS
Antenna
P/N
94-310058-3012)
Page 11

RT-3020 User Guide
[
SSR
2.4GHz Radio Antenna (
\
LEMO
7 Pin to DB9S Data Communications Cable
P/N
94-310059-3006)
(
P/N
82-001000-0003)
] CD-Rom (
Guides to NavCom Technology, Inc. product line,
brochures, software utilities, and technical papers.
^
LEMO
P/N
(
P/N
96-310006-3001) containing User
4-Pin External Power Cable
94-310060-3010)
_ RT-3020 User’s Guide {Not Shown}
P/N
(Hard Copy
96-310005-3001)
` Ruggedized Travel Case {Not Shown}
(
P/N
79-100100-0002)
a
SSR
Antenna Adapter {Not Shown}
(
P/N
91-310020-3001
1-9
Page 12
RT-3020 User Guide
Applications
The RT-3020
number of applications including, but not limited to:
Land Survey / GIS
Asset Location
Hydrographic Survey
Photogrammetric Survey
Machine Control
Railway, Ship and Aircraft Precise Location
GPS
sensors meets the needs of a large
Unique Features
The RT-3020
Positioning Flexibility
The RT-3020 is capable of using two internal
Based Augmentation System
provide
GPS
sensors have many unique features:
Satellite
(
SBAS
) channels that
Wide Area Augmentation System (WAAS)
European Geostationary Navigation Overlay Service
(EGNOS)
itself to use the most suitable correction source available
and changes as the survey dictates.
code corrections. The RT-3020 self configures
or
1-10
Page 13

RT-3020 User Guide
Data Sampling
GPS L1
configuration, and as an optional upgrade as fast as 10,
25, and 50Hz via either of the two serial ports. The
(Position, Time, & Velocity)
standard configuration, and as an optional upgrade as
fast as 10, and 25Hz for high dynamic applications.
GPS
The NCT-2000D
3020 incorporates several patented innovations. The
receiver provides more than 50% signal to noise ratio
advantage over competing technologies. The benefit to
the user is improved real time positioning. Independent
tests have proven the NCT-2000D to be the best
receiver when facing various
Rugged Design
The rugged design of the RT-3020 system components
provides protection against the harsh environments
common to areas such as construction sites, offshore
vessels and mines.
and L2 raw data is 1 to 5 Hz in the standard
data is also 1 to 5 Hz in the
Performance
GPS
engine at the heart of the RT-
multipath
environments.
PVT
Units have been tested to conform to MIL-STD-810F for
low pressure, solar radiation, rain, humidity, salt fog,
sand, and dust.
1-11
Page 14
RT-3020S User Guide
Chapter 2 Interfacing
This chapter details the RT-3020
connectors and status display. Appropriate sources of
electrical power, and how to interface the
communication ports.
GPS
sensor
Electrical Power
The electrical power input comprises a 4-pin
female connector located on the bottom front panel of
the RT-3020, and is labeled ‘DC PWR’ as shown in
Figure 2. The pin designations of this connector are as
follows; see Figure 2 for pin rotation.
Pin Description
1 Return
2 Return
3 Power Input 10 to 30 VDC
LEMO
4 Power Input 10 to 30 VDC
Table 1: External Power Cable Pin-Out
Pins 1 and 2 are connected together inside the RT-3020
GPS
sensor. Pins 3 and 4 are connected together inside
GPS
the
3-12
sensor.
Page 15

RT-3020S User Guide
When using an external power cable longer than
5m(15ft), it is recommended that positive voltage DC
be supplied on both pins 3 and 4, and return on both
pins 1 and 2.
P/N
94-310060-3010 a 3m (10ft) unterminated power
cable fitted with a
FGG.1K.304.CLAC50Z) and red strain relief, is suitable
for supplying power to the RT-3020
cable is supplied with the RT-3020 series of
receivers. The wiring color code and pin designations
are labeled on the cable.
The
GPS
sensor is protected from reverse polarity by an
inline diode. It will operate on any DC voltage between
10 and 30 VDC, which is capable of supplying the
required current. The sensor typically uses
0.67 Amps at 12VDC (8.0 Watts)
0.35 Amps at 24VDC (8.4 Watts)
0.30 Amps at 30VDC (9.0 Watts)
LEMO
plug type (Mfr.
P/N
GPS
sensor. This
GPS
Voltages less than 10VDC will shut the unit down.
When power is restored, the ON switch will need to be
held down for more than 3 seconds.
Voltages in excess of 30VDC will damage the unit. It is
extremely important to ensure that the power supply is
well conditioned with surge protection. This is
especially true for vehicular electrical systems, which
can create voltage spikes far in excess of 30VDC.
3-13
Page 16
RT-3020 User Guide
Communication Ports
The RT-3020
LEMO
connector communication ports located at the
bottom front of the
labeled
RS232 standard with data speeds between 1200
and 115.2kbps. The pin-outs for these connectors are
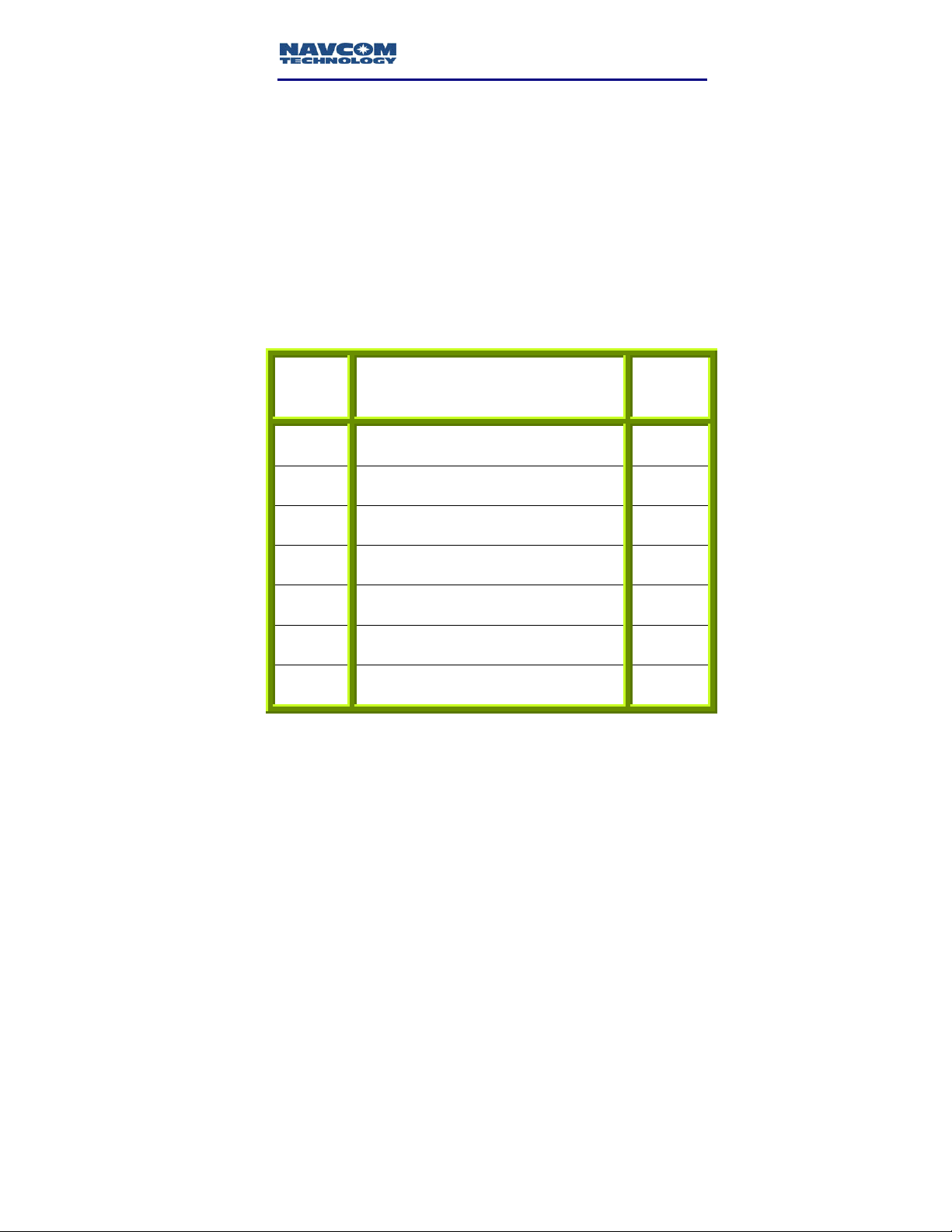
described in Table 2. An interface data cable (P/N 94310059-3006) is supplied with the RT-3020 for easy
startup. The cable construction is described in Figure 4.
LEMO
Pins
1 CTS Clear To Send 8
2 RD Receive Data 2
3 TD Transmit Data 3
4 DTR Data Terminal Ready 4
COM
GPS
sensor is fitted with two 7-pin female
GPS
sensor as shown in Figure 2
1 and
COM
2. Each conforms to the EIA
Signal Nomenclature
DCE
w/respect to
DB9S
]
bps
DB9S
Pins
5 RTN Return [Ground] 5
6 DSR Data Set Ready 6
7 RTS Request To Send 7
Table 2: Serial Cable Pin-Outs
3-14
Page 17

RT-3020S User Guide
Figure 2: RT-3020 Front View
Figure 3: RT-3020M Only Back View
3-15
Page 18

RT-3020 User Guide
Figure 4: NavCom Serial Cable 94-310059-3006
Pin 5 should connect to shield of cable at both ends.
Indicator Panel
Figure 5 RT-3020 Indicator Panel
The Indicator Panel provides the on/off (I/O) switch and
a quick view of the status of the RT-3020
corrections source & type, and radio signal strength.
Each of the three indicators has three
depict status as detailed in the following tables.
GPS
sensor,
LED
s, which
3-16
Page 19

RT-3020S User Guide
To power the unit on or off, the on/off (I/O) switch
must be depressed for more than 3 seconds. During
GPS
power up of the
period of 3-5 seconds.
Link LEDs
sensor, all
LED
s will be on for a
The Link lights are software configurable via the
appropriate NavCom
the numerous scenarios available for the Link light, only
the factory default configuration [
discussed.
LINK Status
Command Mode
Rapidly repeating Red to Amber to Green
indicates Searching for base radio signal.
proprietary command
Rover
Mode] is
. Because of
Strong Signal Strength from the base radio.
Medium Signal Strength from base radio.
Weak Signal Strength from base radio.
Table 3: Link Light Indication
Base LEDs
If the RT-3020 has been configured as a
LED
the
produced. Where the color of the
format of the correction, the blink rate indicates
specifically which message is being sent. Table 4
s indicate the type of
RTK
corrections being
LED
Base Station
will indicate the
,
3-17
Page 20

RT-3020 User Guide
n
illustrates the color, format, message, and blink rate of
the
LED
s for the type of corrections being output.
BASE Status Blink Rate
Rover mode N/A
NCT Proprietary 5e=2Hz; 5b=1Hz; Both=5Hz
CMR 1Hz
GPS LEDs
GPS
Status
Power is off.
Power is on. No satellites tracked.
Tracking satellites,
Non-differential positioning.
Code based differential positioning.
Dual frequency
RTCM
Table 4:
20,21=5Hz; 18,19=1Hz
Base statio
Phase positioning.
Indication
position
not available yet.
Table 5:
GPS
Light Indication
3-18
Page 21

RT-3020S User Guide
The
GPS LED
selected (1, 2, 5, 10 and 25 Hz).
s will blink at the positioning rate
1 PPS
The RT-3020M has the ability to output a precise pulse
every second with a relative accuracy to within 12.5ns,
and an absolute accuracy better than 100ns. The 1
is 50-Ohm, TTL level. By using the appropriate NavCom
proprietary command
configurable between 0.01 and 0.50 seconds, with the
default width set to 0.10 seconds. The delay default is
set to 0.0 seconds from the
is configurable between 0.0 seconds and 0.999
seconds. This precise pulse can be used for a variety of
time mark applications where precise timing is a must.
PPS
The 1
or falling edge of the pulse. Connecting the 1
output requires a cable with a BNC male connector.
P/N
male to BNC male connection. Detailed specifications
of this pulse can be found on the NavCom website at
pulse is user configurable to sync on the rising
94-310050-3003 provides a 0.9m (3ft) long BNC
support.navcomtech.com
, the 1
PPS
pulse width is user
GPS
zero second mark and
PPS
PPS
CAN Bus/Event
The RT-3020M also employs
bus is a balanced (differential) 2-wire interface, and is
ISO11898 -24V compliant. The
asynchronous transmission scheme. This interface
employs a serial binary interchange and is widely used
in the automotive industry. The data rate for the RT3020M
Termination resistors are used at each end of the cable.
This port/connector is shared with the
Detailed specifications of the
the NavCom website at
CAN Bus
is defined as 250K
CAN Bus
CAN Bus
technology.
CAN
interface uses an
bps
maximum.
Even
t Input.
can be found on
support.navcomtech.com
CAN
3-19
Page 22

RT-3020 User Guide
The RT-3020M also can utilize an event input. This
input pulse can be used to synchronize any external
GPS
incident that requires precise
aerial photography. The action of a camera’s aperture
could send a pulse to the
and have it output position information relative to the
time the photograph was taken. It requires input
impedance of 50 Ohms, a minimum High Level Input of
2.5V, and a minimum Low Level Input of 1.2V. The
propagation delay is less than 100nsec. The Event Input
latch can be configured to sync on the rising, or falling
edge of the event input pulse by using the appropriate
NavCom
EVT MKR/CAN BUS port requires a five core 5mm
diameter cable fitted with a
FGG.0K.305.CLAC50Z plus strain relief. This is available
P/N
as
Event
proprietary command
94-310062-3003. Detailed specifications of the
Input can be found on the NavCom website at
support.navcomtech.com
Event
time tagging, such as
port of the RT-3020M
. Connecting the shared
LEMO
plug type
3-20
Page 23

RT-3020S User Guide
Chapter 3 Installation
This chapter provides guidance on how the hardware
should be installed for optimum performance.
Tri-Mode Antenna
The antenna is fitted with a 5/8” BSW threaded mount
with a depth of 16mm (0.63”). This should be used as
the primary means of mounting the antenna.
It is possible to remove the 5/8” BSW threaded alloy
insert to reveal the secondary means of mounting the
antenna which consists of a 1-14UNS-2B thread with a
depth of 16mm (0.63”) typically used in the marine
industry for navigation antenna.
Figure 6: Tri-Mode
GPS
Antenna
The eight Philips screws on the base of the antenna
should not be loosened or used for mounting the
antenna. This will compromise the environmental seal
of the antenna, may lead to internal damage and will
void the equipment warranty.
3-21
Page 24

RT-3020 User Guide
There should be an unobstructed view of the sky above
a 10-degree
visibility for
horizon should be mapped using a compass and
clinometer and used in satellite prediction software with
a recent satellite
satellite visibility at that location. Potential sources of
interference should be avoided where possible. Example
interference sources include overhead power lines, radio
transmitters and nearby electrical equipment.
elevation mask
RTK
use. Any obstructions above the
almanac
for optimum
to assess the impact on
GPS
satellite
Calculating the
known
determined from
latitude, longitude
azimu h
and
t
elevation
and height can be
of these from a
support.navcomtech.com
GPS Sensor
The RT-3020
surface using four screws spaced as per the following
diagram of the base plate. In environments with high
vibration, shock absorbers suitable for 1.8kg (4lbs)
should be considered.
GPS
sensor can be mounted to a flat
Figure 7: RT-3020 Base Plate Dimensions
3-22
Page 25

RT-3020S User Guide
The RT-3020S can be installed in a backpack for mobile
surveying applications.
The sensor should not be placed in a confined space or
where it may be exposed to excessive heat, moisture or
humidity.
There are no user serviceable parts inside the RT-3020
GPS
sensor. Undoing the four screws, which secure the
front end plate, and the four securing the rear end plate
will void the equipment warranty.
Basics of RTK Surveying
The idea behind
quality, low ambiguity accuracy of post-processed
position fixes, in a real time environment. In order to
accomplish this task, the
roving sensor must have its error sources inherent to
GPS
corrected as much as possible. These errors will be
accounted for virtually instantaneously; thus the Real
Time in
Setting up a
errors in a roving
would be set up on a known surveyed location, with
this position locked in. It would then transmit its code,
clock, and
the roving sensor. The roving sensor would use this
information to correct each
receives.
In the RT-3020 this link between the
and the
RTK
rover
Spectrum Radio
SSR
was designed specifically with
has built in interference rejection so any extraneous
RTK
surveys is to achieve the high
GPS
data collected at the
.
Reference (Base) Station
GPS
sensor. The reference
reference station
coordinate information to
GPS
can minimize
measurement it
reference station
is achieved via a 2-way, 2.4GHz
(
SSR
) integrated into the RT-3020. This
GPS RTK
GPS
GPS
sensor
Spread
in mind. It
3-23
Page 26

RT-3020 User Guide
radio signals will not interfere with the transmission of
the correction data.
The RT-3020 when configured as a
can transmit corrections to any number of
receivers
decoding one of the three
RTCM
[
2.4Ghz, data being broadcast via modulated radio
carrier frequency is limited to line of sight for error free
reception. However, the signal can be received in less
than ideal environments, though some data loss could
occur. The
sight range up to a maximum of 10km.
When setting up the reference sensor, it is best to have
the
sensors since radio signals of such high frequency tend
to travel a shorter distance than their lower frequency
counterparts, and are apt not to penetrate obstructions
as well over distance. This also affords the reference
sensor to transmit to all
minimal obstruction. Figure 8 & 9 illustrates a proper
and improper
capable of picking up the radio signal and
GPS
, CMR, or NavCom proprietary] transmitted. At
SSR
integrated into the RT-3020 has a line of
reference station
sensor elevated above the roving
r
rove s
RTK reference station
reference sta ion
roving
correction formats
in all directions with
installation.
t
3-24
Page 27

RT-3020S User Guide
Figure 8: Good Line of Sight
Figure 9: Poor Line of Sight
RTK
RTK
setup
setup
3-25
Page 28

RT-3020 User Guide
Communication Ports
Connect the supplied
serial cable (
default control port) connector of the RT-3020.
Connect the DB9S end to your controlling device. Note
that some devices may require an additional adaptor.
P/N
By factory default
port for the RT-3020.
control port by using the appropriate NavCom
proprietary commands
types cannot output on the controlling port.
LEMO
7-Pin end of the NavCom
94-310059-3006) to
COM 2
is designated as the control
COM 1
. Although some output data
can be designated as the
COM 2
(factory
Figure 10: Communication Port Connections
3-26
Page 29

RT-3020 User Guide
GPS Antenna Connector
The connector used on the RT-3020 is a TNC female,
labeled
shown in Figure 2.
GPS
Ant on the front panel of the sensor as
The center pin of the TNC connector carries a voltage
of 4.4 VDC (nominal), which is used to power the
GPS
preamplifier in the
powered on, the antenna cable should not be
disconnected.
The cable length between the RT-3020 and the TriMode antenna should not exceed more than 10dB loss
at 1.5GHz. Examples are:
Cable Type Maximum Length
RG58/U 13.7m (45ft)
LMR400 59.7m (196ft)
antenna. When the
GPS
unit is
P/N
NavCom cable
(12ft) length of RG58/U cable with a right angle male
TNC connector to a straight male TNC connector. This
is suitable for connecting the RT-3020
the Tri-Mode antenna.
In-line amplifiers suitable for all
used to increase the length of the antenna cable but
care should be exercised that tracking performance is
not degraded due to multiple connections and possible
ingress of moisture and dust.
94-310058-3012 provides a 3.6m
GPS
sensor to
GPS
frequencies may be
The antenna cable can degrade signal quality if
incorrectly installed, or the cable loss exceeds NavCom
specifications. Care should be taken not to kink, stretch
or damage the antenna cable. Do not place the cable
adjacent to cables carrying electrical power or radio
frequencies.
3-27
Page 30

RT-3020 User Guide
Where the
electromagnetic discharge such as lightning, an in-line
electrical surge suppressor should be considered
between the
should comply with local regulatory codes and
practices.
GPS
antenna is exposed to sources of
GPS
sensor and antenna. Such installations
3-28
Page 31

RT-3020 User Guide
Chapter 4 Configuration
The RT-3020
detailed control language, which allows each unit to
be tailored specifically to the required application.
GPS
sensor has a rich interface and
Factory Default Settings
By factory default
Port. The Control Port manages the full functionality of
the RT-3020.
the data port. By factory default this port handles the
non-NavCom proprietary messages that are input
and/or output to/from the receiver. By factory default
NMEA
COM 1
COM 2
Baud. This baud rate can be changed to accommodate
faster data rates.
The standard factory configuration for the RT-3020
allows for the basic operation of the system. The control
port factory default NavCom Proprietary Message
Blocks output is described in Table 6. These message
blocks afford the novice or seasoned
opportunity to get up and surveying in a minimal
period of time.
message GGA data is scheduled for output from
at 1Hz. The
communicates is factory defaulted to 19.2k
COM 2
COM 1
is designated as the Control
by factory default is designated as
baud rate
at which
GPS
COM 1
and
user the best
The output data rate for the factory default message
blocks is described in Table 6 and will remain at that
rate until the user specifies otherwise by issuing the
appropriate NavCom
Proprietary command
.
4-29
Page 32

RT-3020 User Guide
Message Rate Description
44
81
86
B0
B1
Table 6: Factory Setup Proprietary Messages
• 44 Packed
corresponding to each satellite in the
constellation. This information includes
number of
seconds] that
reference week,
source,
4 & 5.
On
Change
On
Change
On
Change
On
Change
On
Change
Almanac
almanac
almanac
almanac
Packed
Packed
Channel
Raw Measurement Data
: This message provides data
collected,
was collected,
almanac
health, pages 1-25, and subframes
reference time,
Almanac
Ephemeris
Status
PVT
Block
GPS
Time of week [in
COM
GPS
GPS
Week
almanac
almanac
2
• 81 Packed
information as it relates to individual satellites
tracked. This information includes
number of
[in seconds] that
and Sub-frame 1, 2, & 3 data.
Ephemeris
ephemeris
ephemeris
: This message provides
GPS
collected,
GPS
Time of week
was collected, IODC,
4-30
Week
Page 33

RT-3020 User Guide
• 86
• B0 Raw Measurement Data: Raw Measurement Data
• B1
Channel
information and contains the
of Week, NCT-2000D Engine status, solution status,
number of satellites being tracked and the number
and identity of satellites used in solution,
the satellite
Block that contains the
Week, Time Slew Indicator and Status. Information
included is
Phase, P1-CA
and
L1
additional satellite.
PVT
latitude, longitude, navigation mode, and
information.
Status: Provides receiver
GPS
PRN
.
GPS
Week,
Channel
Phase. This data stream is repeated for any
: Provides
Status, CA
Pseudorange
GPS
Week number, satellites used,
, P2-CA
channel
week,
GPS
status
Time
PDOP
GPS
Time of
Pseudorange, L1
Pseudorange
DOP
and
,
The term “On Change” indicates that the RT-3020 will
output the specified message only when the
information in the message changes. Thus in some
epoch
cases, there may be an
output.
without a message block
Advanced Configuration Settings
If a third party
your RT-3020
manual/user’s guide.
Controller
GPS
sensor, please refer to that
solution was provided with
4-31
Page 34

RT-3020 User Guide
Chapter 5 Safety Instructions
The RT-3020
navigation and positioning using the
Positioning System
of portable
these safety instructions prior to use of the equipment.
GPS
sensor is designed for precise
Global
. Users must be familiar with the use
GPS
equipment, the limitations thereof and
FCC Notice
This device complies with Part 15 of the FCC Rules.
Operation is subject to the following two conditions:
(1) this device may not cause harmful interference, and
(2) this device must accept any interference received,
including interference that may cause undesired
operation.
Transport
The NavCom equipment should always be carried in its
case. The case must be secured whilst in transit to
minimize shock and vibration.
All original packaging should be used when
transporting via rail, ship or air.
5-32
Page 35

RT-3020 User Guide
Maintenance
The NavCom equipment can be cleaned using a new
lint free cloth that may be moistened, but only with
pure alcohol.
Connectors must be inspected and if necessary cleaned
before use. Always use the provided connector
protective caps to minimize moisture and dirt ingress.
Cables should be regularly inspected for kinks and cuts
as these may cause interference and equipment failure.
Damp equipment must be dried at a temperature less
than +40°C (104°F), but greater than 5°C (41°F) at the
earliest opportunity.
External Power Source
The RT-3020 is supplied with an external power cable
(
P/N
94-310060-3010). This must be connected to the
chosen external power solution in accordance with
Chapter 2 Interfacing\Electrical Power. It is important
that the external power source allow sufficient current
draw for proper operation. Insufficient supplied current
will case damage to your external power source.
If your chosen external power source is a disposable
battery, please dispose of the battery in accordance
with your local regulations.
Safety First
The owner of this equipment must ensure that all users
are properly trained prior to using the equipment and
5-33
Page 36

RT-3020 User Guide
are aware of the potential hazards and how to avoid
them.
Other manufacturer’s equipment must be used in
accordance with the safety instructions issued by that
manufacturer. This includes other manufacturers
equipment that may be attached to NavCom
Technology Inc manufactured equipment.
The equipment should always be used in accordance
with local regulatory practices for safety and health at
work.
There are no user serviceable parts inside the RT-3020
GPS
sensor. Accessing the inside of the equipment will
void the equipment warranty.
Typically the RT-3020 may be mounted in a backpack,
the crew cab of construction machinery, or if
configured as a reference station on a building top.
Care should be taken to ensure that the RT-3020 does
not come into contact with electrical power
installations, the unit is securely fastened and there is
protection against electromagnetic discharge in
accordance with local regulations.
The
GPS
sensor has been tested in accordance with FCC
regulations for electromagnetic interference. This does
not guarantee non-interference with other equipment.
GPS
Additionally, the
by nearby sources of electromagnetic radiation.
The
Global Positioning System
the United States Air Force. Operation of the
satellites may be changed at any time and without
warning.
sensor may be adversely affected
is under the control of
GPS
5-34
Page 37

RT-3020 User Guide
A
The technical specifications of this unit are detailed
below. NavCom Technology, Inc. is constantly
improving, and updating our technology. For the latest
technical specifications for all products go to:
support.navcomtech.com
GPS
Sensor Technical Specifications
RT-3020S and RT-3020M
These
coin cell used to maintain
removed from the unit. This allows faster satellite
acquisition upon unit power up. The cell has been
designed to meet over 10 years of service life before
requiring replacement at a NavCom approved
maintenance facility.
GPS
sensors are fitted with an internal Lithium
GPS
time when power is
Features
• “All-in-view" tracking
• L1 &
• C/A, P1 & P2 code tracking
• Proprietary RTK processing with on-the-fly
initialization
• Fast ambiguity resolution
• Units are user configurable as base or rover
• User programmable output rates
• Built-in Spread Spectrum Radio (SSR)
• External 12VDC power
• 64 MB internal memory to record field data
• NavCom compact RTK format or standard RTCM v2.2
• Output format NMEA 0183 or NavCom binary format
L2
full wavelength carrier phase tracking
or CMR formats
A-35
Page 38

RT-3020 User Guide
• Superior interference suppression (both in-band &
out-of-band)
• Patented multipath rejection
• 2 separate WAAS/EGNOS channels
• Self-survey mode (position averaging)
• Compact Physical Size
• CAN bus interface (RT-3020M Only)
• 1PPS output (RT-3020M Only)
• Event Marker input (RT-3020M Only)
Physical and Environmental
• Size (L x W x H): 8.18” x 5.67” x 3.06”
• Weight: 4lbs. (1.81 kg)
• External Power:
Input Voltage: 12 VDC nominal
(10VDC to 30VDC)
Consumption: < 10 W
• Connectors
I/O Ports: 2 x 7-pin LEMO
DC Power: 4-pin LEMO
SSR Antenna: BNC
GPS Antenna TNC
CAN bus/Event Marker: 5-pin LEMO
(RT-3020M Only)
1PPS Output: BNC
(RT-3020M Only)
• Temperature (ambient)
Operating: -40º C to +55º C
Storage: -40º C to +85º C
• Humidity: 95% non-condensing
A-36
Page 39

RT-3020 User Guide
Measurement Performance
GPS Receiver Performance
• RTK Accuracy (RMS)*
Position (H): < 1 cm + 1ppm
Position (V): < 2 cm + 1ppm
• Pseudo-range Measurement Precision (RMS):
Raw C/A code : 20cm @ 42 db-hz
Raw carrier phase noise: L1: 0.95 mm
@ 42 dB-Hz
L2: 0.85 mm
@ 42 dB-Hz
• Real-time DGPS (code) Accuracy** (RMS):
Position (H): 12 cm + 2ppm
Position (V): 25 cm + 2ppm
Velocity: 0.01 m/s
• User programmable output rates:
PVT: <1Hz, 2Hz, 5Hz Standard
(10Hz, & 25Hz Optional)
Raw data: <1Hz, 2Hz, 5Hz Standard
(10Hz, 25Hz, & 50Hz Optional)
• Data Latency:
PVT: < 20 ms at all nav rates
Raw data: < 20 ms at all rates
• Time-to-first-fix:
Cold Start
Satellite Acquisition: < 60seconds (typical)
Satellite Reacquisition: < 1 second
B-37
Page 40

RT-3020 User Guide
• Dynamics:
Acceleration: up to 6g
Speed: < 300 m/s*
Altitude: < 60,000 ft*
• 1PPS Accuracy: 12.5nS (Relative; User Configurable)
(RT-3020M Only)
*Restricted by export laws
* Up to 10 km if using receivers as base & rover.
* * Up to 200 km if using receivers as base station &
mobile.
Built in Radio Performance
• Frequency Band: 2.400GHz - 2.485GHz
• Modulation: Frequency Hopping
Spread Spectrum
• Data Rate: 9600bps (configurable)
• Transmit Power: 1-Watt max
• Receiver Sensitivity: -105dBm
• Range @ Max. Power: 10km Line of Sight
• Maximum EIRP: 6dBW***
• Optional Pole-Mount Antenna: 3db gain
*** Using high gain antenna
EIRP and hopping bandwidth restrictions vary
depending on local regions. Contact NavCom
Technology, Inc. for regulations in your local area.
Connector Assignments
•Data Interfaces:
2 serial ports; from 1200 bps to 115.2 kbps
CAN Bus I/F (RT-3020M Only)
A-38
Page 41

RT-3020 User Guide
Event Marker I/P (RT-3020M Only)
1PPS (RT-3020M Only)
• Com Port Functions
NCT Proprietary Control, Data
Input/Output Data Messages
• NCT Proprietary Data: PVT
Raw Measurement
Satellite Messages
Nav Quality
Receiver Commands
• NMEA Messages ALM, GGA, GLL, GSA,
(Output Only): GSV, RMC, VTG, ZDA, GST
• Code Corrections: RTCM 1 or 9
WAAS/EGNOS
• RTK Correction Data: NCT Proprietary
RTCM 18/19 or 20/21
CMR (Msg. 0, 1, 2)
LED Display Functions (Default)
Link: Base Signal Strength
Base: Type of Correction/Rate
Rover; = N/A
GPS: Position Quality
Satellite Based Augmentation System Signals
• WAAS/EGNOS
B-39
Page 42

RT-3020 User Guide
B GPS Antenna Technical Specifications
The standard antenna supplied with the RT-3020
sensor is capable of Tri-Mode reception.
GPS
L1+L, L2 GPS Antenna
1525-1585 MHz GPS L1 plus Inmarsat L Band
1217-1237 MHz GPS L2
Polarization Right Hand Circular (RHCP)
Finish Fluid resistant Ultem, UV stable
Cable Connector TNC Female
Pre–Amplifier 39dB gain (+/-2)
Input Voltage 4.2 to 15.0 VDC
Impedance 50 Ohms
VSWR ≤ 2.0:1
Band Rejection 20 dB @ 250MHz
Power Handling 1 Watt
Operating Temp -55°C to +85°C
Altitude 70,000’
NavCom
mount antenna, also rated to 70, 000 feet.
P/N
82-001000-0008 is an optional aircraft
Designed to DO-160D Standard
B-40
Page 43

RT-3020 User Guide
Figure 11: Tri-Mode Antenna Dimensions
In order to achieve the greatest level of accuracy, the
absolute
into your processing. For
the Tri-Mode Antenna go to
phase center
support.navcomtech.com
B-41
values must be incorporated
phase center
information for
Page 44

RT-3020 User Guide
Glossary
.yym files see meteorological files (where yy = two digit
year data was collected).
.yyn files see navigation files (where yy = two digit year
data was collected).
.yyo files see observation files (where yy = two digit
year data was collected).
almanac files an almanac file contains orbit
information, clock corrections, and atmospheric delay
parameters for all satellites tracked. It is transmitted to a
receiver from a satellite and is used by mission planning
software.
alt see
altitude vertical distance above the
is always stored as height above
receiver but can be displayed as height above
(HAE) or height above
antenna phase center (APC) The point in an antenna
where the
height above ground of the APC must be measured
accurately to ensure accurate
height can be calculated by adding the height to an
easily measured point, such as the base of the antenna
mount, to the known distance between this point and
the APC.
APC see
altitude
.
ellipsoid
ellipsoid
mean sea level (MSL
GPS
signal from the satellites is received. The
GPS
readings. The APC
in the
).
antenna phase center or phase center
or
geoid
GPS
ellipsoid
.
. It
Glossary-42
Page 45

RT-3020 User Guide
Autonomous positioning (
in which a
time from satellite data alone, without reference to data
supplied by a
corrections.
least precise positioning procedure a
perform, yielding
meters with Selective Availability on, and 30 meters
with S/A off.
azimuth the
the angle between the
in a clockwise direction from the north branch of the
meridian
base station see
baud rate (
received each second. For example, a
means there is a data flow of 9600 bits each second.
One character roughly equals 10 bits.
bits per second see
bps see
GPS
receiver computes
reference station
Autonomous positioning
position
azimu h
.
of a line is its direction as given by
t
reference station
bits per second
baud rate
baud rate
GPS
) a mode of operation
position
or orbital clock
fixes that are precise to 100
meridian
and the line measured
.
) the number of bits sent or
fixes in real
is typically the
GPS
receiver can
baud rate
of 9600
BSW (British Standard Whitworth) a type of coarse
screw thread. A 5/8” diameter
mount for survey instruments.
C/A code see
CAN BUS a balanced (differential) 2-wire interface that
uses an asynchronous transmission scheme. Often used
for communications in vehicular applications.
channel a
circuitry necessary to receive the signal for a single
satellite.
Coarse Acquisition code
channel
of a
GPS
BSW
is the standard
.
receiver consists of the
GPS
Glossary-43
Page 46

RT-3020 User Guide
civilian code see
Coarse Acquisition code (C/A or
the pseudo-random code generated by
is intended for civilian use and the accuracy of readings
using this code can be degraded if
(
S/A
) is introduced by the US Department of Defense.
COM# shortened form of the word Communications.
Indicated a data communications port to/from the
sensor to a
controller a device consisting of hardware and software
used to communicate and manipulate the I/O functions
of the
Compact Measurement Record (CMR) a standard
format for
corrections from a
data files files that contain Proprietary,
RTCM
DB9P a type of electrical connector containing 9
contacts. The P indicates a plug pin (male).
DB9S a type of electrical connector containing 9
contacts. The S indicates a slot pin (female).
DGPS see
Differential
uses two receivers, a
a
reference s ation
controller
GPS
sensor.
DGPS
or any type of data logged from a
Differential GPS
reference station
actual and observed ranges to the satellites being
tracked. The coordinates of the unknown location can
be computed with sub-meter level precision by
Coarse Acquisition code
.
Civilian code
GPS
selective availability
or data collection device.
corrections used to transmit
reference station
to
rover
GPS
GPS
.
GPS (DGPS
t
computes corrections based on the
) a positioning procedure that
rover
at an unknown location and
at a known, fixed location. The
)
satellites. It
GPS
sensors.
, NMEA,
receiver.
Glossary-44
Page 47

RT-3020 User Guide
applying these corrections to the satellite data received
by the
Dilution of Precision (
magnitude of error in
orientation of the
receiver. There are several
components of the error. Note: this is a unit less value.
see also
DOP see
dual-frequency a type of
L1 and L2 signals from
receiver can compute more precise position fixes over
longer distances and under more adverse conditions
because it compensates for ionospheric delays. The SF2050 is a dual frequency receiver.
dynamic mode when a
dynamic mode
certain algorithms for
order to calculate a tighter
EGNOS (European Geostationary Navigation Overlay
Service) a European satellite system used to augment
the two military satellite navigation systems now
operating, the US
elevation distance above or below Local Vertical
Datum.
elevation mask the lowest
which a receiver can track a satellite. Measured from
the horizon to zenith, 0º to 90º.
ellipsoid a mathematical figure approximating the
earth’s surface, generated by rotating an ellipse on its
rover
.
DOP
GPS position
GPS
satellites with respect to the
PDOP
.
Dilution of Precision
GPS
, it assumes that it is in motion and
GPS position
GPS
and Russian GLONASS systems.
) a class of measures of the
fixes due to the
DOP
s to measure different
.
GPS
receiver that uses both
satellites. A
GPS
receiver operates in
position
elevation
dual-frequency
fixing are enabled in
fix.
, in degrees, at
GPS
Glossary-45
Page 48

RT-3020 User Guide
minor axis.
WGS-84
which does not match the earth’s geoidal surface
closely, so
large vertical error component. Conventionally surveyed
positions usually reference a
undulating surface and approximates the earth’s surface
more closely to minimize
epoch literally a period of time. This period of time is
defined by the length of the said period.
geoid the gravity-equipotential surface that best
approximates
the earth. The surface of a
for
GPS
ellipsoid
geoid
calculating the distance between the
ellipsoid
GPS altitude
GIS (Geographical Information Systems) a computer
system capable of assembling, storing, manipulating,
updating, analyzing and displaying geographically
referenced information, i.e. data identified according to
their locations. GIS technology can be used for scientific
investigations, resource management, and
development planning. GIS software is used to display,
edit, query and analyze all the graphical objects and
their associated information.
GPS
positions are computed relative to the
ellipsoid
GPS altitude
readings, which are measured relative to an
. Conventionally surveyed positions reference a
. More accurate
at each
. An
ellipsoid
measurements can contain a
altitude
mean sea level
GPS
readings can be obtained by
position
measurement.
and subtracting this from the
has a smooth surface,
geoid
, which has an
errors.
over the entire surface of
geoid
is too irregular to use
geoid
and
Global Positioning System (GPS) geometrically, there
can only be one point in space, which is the correct
GPS
distance from each of four known points.
the distance from a point to at least four satellites from
a constellation of 24 NAVSTAR satellites orbiting the
measures
Glossary-46
Page 49

RT-3020 User Guide
earth at a very high
to calculate the point’s
GMT see Greenwich Mean Time
GPS see
GPS time a measure of time.
UTC
correct for changes in the earth’s period of rotation. As
of September 2002
UTC
Greenwich Mean Time (
meridian
HAE see
JPL Jet Propulsion Laboratory
Kbps kilobits per second
L-Band the group of radio frequencies
extending from approximately 400 MHz to
approximately 1600 MHz. The
frequencies L1 (1575.4 MHz) and L2 (1227.6
MHz) are in the
L1 carrier frequency the primary
by
frequency is 1575.42MHz. It is modulated by
P-code or Y-code, and a 50 bit/second navigation
message.
L2 carrier frequency the secondary
by
frequency is 1227.6MHz. It is modulated by
Y-code, and a 50 bit/second navigation message.
lat see latitude.
Global Positioning System
, but does not add periodic ‘leap seconds’ to
.
passing through Greenwich, England.
altitude
GPS
satellites to transmit satellite data. The
GPS
satellites to transmit satellite data. The
altitude
GPS
, and
ellipsoid
L-Band
. These distances are used
position
time is 13 seconds ahead of
range.
.
.
GPS
time is based on
GMT
) the local time of the 0°
.
GPS
carrier
L-Band
carrier used
C/A code
L-Band
carrier used
P-code
or
,
Glossary-47
Page 50

RT-3020 User Guide
latitude (lat) the north/south component of the
coordinate of a point on the surface on the earth;
expressed in angular measurement from the plane of
the equator to a line from the center of the earth to the
point of interest. Often abbreviated as Lat.
LED acronym for Light Emitting Diode
LEMO a type of connector.
LES Land Earth Station the point on the earth’s surface
where data is up linked to a satellite.
logging interval the frequency at which positions
generated by the receiver are logged to
long see longitude.
longitude (
coordinate of a point on the surface of the earth;
expressed as an angular measurement from the plane
that passes through the earth’s axis of rotation and the
0°
meridian
of rotation and the point of interest. Often abbreviated
Long
as
Mean Sea Level (
sea level.
meridian one of the lines joining the north and south
poles at right angles to the equator, designated by
degrees of longitude, from 0° at Greenwich to 180°.
meteorological (.YYm) files one of the three file types
that make up the
the last two digits of the year the data was collected. A
meteorological file contains atmospheric information.
MSL see
long
) the east/west component of the
and the plane that passes through the axis
.
MSL
) a vertical surface that represents
RINEX
Mean sea level
file format. Where YY indicates
data files
Glossary-48
Page 51

RT-3020 User Guide
multipath error a positioning error resulting from
interference between radio waves that has traveled
between the transmitter and the receiver by two paths
of different electrical lengths.
navigation (.YYn) files one of the three file types that
make up the
last two digits of the year the data was collected. A
navigation file contains satellite
information.
observation (.YYo) files one of the three file types that
make up the
last two digits of the year the data was collected. An
observation file contains raw
P/N Part Number
P-code the extremely long pseudo-random code
generated by a
by the U.S. military, so it can be encrypted to Y-code
deny unauthorized users access.
parity a method of detecting communication errors by
adding an extra parity bit to a group of bits. The parity
bit can be a 0 or 1 value so that every byte will add up
to an odd or even number (depending on whether odd
or even parity is chosen).
PDA Personal Digital Assistant
RINEX
RINEX
GPS
file format. Where YY indicates the
position
file format. Where YY indicates the
GPS position
satellite. It is intended for use only
and time
information.
PDOP see
PDOP mask the highest
computes positions.
phase center the point in an antenna where the
signal from the satellites is received. The height above
ground of the
Position Dilution of Precision
PDOP
value at which a receiver
phase center
must be measured
.
GPS
Glossary-49
Page 52

RT-3020 User Guide
accurately to ensure accurate
center
height can be calculated by adding the height to
an easily measured point, such as the base of the
antenna mount, to the known distance between this
point and the
Position the latitude, longitude, and
An estimate of error is often associated with a
Position Dilution of Precision (PDOP) a measure of
the magnitude of Dilution of Position (
the x, y, and z coordinates.
Post-processing a method of differential data
correction, which compares data logged from a known
reference point to data logged by a
the same period of time. Variations in the
reported by the
the positions logged by the
processing is performed after you have collected the
data and returned to the office, rather than in real time
as you log the data, so it can use complex, calculations
to achieve greater accuracy.
Precise code see
PRN (Uppercase) typically indicates a
number sequence from 1 – 32.
prn (Lower Case) see Pseudorandom Noise.
Protected code
Proprietary commands those messages sent to and
received from
Technology, Inc. own copyrighted binary language.
phase center
reference station
P-code
see
P-code
GPS
equipment produced by NavCom
GPS
readings. The
.
roving receiver
can be used to correct
roving receiver
.
.
altitude
DOP
) errors in
position
. Post-
GPS
satellite
phase
of a point.
position
.
over
Glossary-50
Page 53

RT-3020 User Guide
pseudo-random noise (
appears to be randomly distributed but can be exactly
reproduced. Each
in its signals.
lock onto satellites and to compute their pseudoranges.
Pseudorange the apparent distance from the
station
the time the signal takes to reach the antenna by the
speed of light (radio waves travel at the speed of light).
The actual distance, or
because various factors cause errors in the
measurement.
PVT
in the NCT proprietary message format.
Radio Technical Commission for Maritime Services
range the distance between a satellite and a
receiver’s antenna. The
the
atmospheric conditions which slow down the radio
waves, clock errors, irregularities in the satellite’s orbit,
and other factors. A
determined if you know the ranges from the receiver to
at least four
be one point in space, which is the correct distance
from each of four known points.
RCP a NavCom Technology, Inc. proprietary processing
technique in which carrier phase measurements, free of
Ionospheric and Troposphere effects are used for
navigation.
’s antenna to a satellite, calculated by multiplying
GPS
information depicting Position, Velocity, Time
see
RTCM
pseudorange
GPS
GPS
receivers use
.
. However, errors can be introduced by
GPS
satellites. Geometrically, there can only
prn
) a sequence of data that
satellite transmits a unique
PRN
s to identify and
range
, is not exactly the same
range
is approximately equal to
GPS
receiver’s location can be
PRN
reference
GPS
Real-Time Kinematic (
very accurate 3D
The
base station
transmits its
RTK
position
) a
GPS
system that yields
fixes immediately in real-time.
GPS position
to
roving
Glossary-51
Page 54

RT-3020 User Guide
receivers
receivers
correct their own positions. Accuracies of a few
centimeters in all three dimensions are possible.
requires
radio modems.
reference station a
for a fixed, known location. Some of the errors in the
GPS
positions recorded at the same time by
which are relatively close to the
reference station
accuracy of
RHCP Right Hand Circular Polarization used to
discriminate satellite signals.
RINEX (Receiver Independent Exchange) is a file set
of standard definitions and formats designed to be
receiver or software manufacturer independent and to
promote the free exchange of
format consists of separate files, the three most
commonly used are: the observation
(.YYo) file, the navigation (.YYn) file, and the
meteorological (.YYm) files; where YY indicates the last
two digits of the year the data was collected.
rover any mobile
collecting data in the field. A
can be differentially corrected relative to a stationary
reference
corrections from a
roving receiver see
RTCM
(Radio Technical Commission for Maritime Services)
as the receiver generates them, and the
use the
dual frequency GPS
positions for this location can be applied to
base station
readings to differentially
receivers and high speed
reference station
collects
GPS
roving receivers
reference station
is used to improve the quality and
GPS
data collected by
GPS
receiver and field computer
roving receive s. r
GPS
signals are RHCP.
GPS
data. The
RINEX
roving receiver’s position
GPS
receiver or by using
SBAS
such as StarFire.
rover
.
GPS
orbit and clock
roving
RTK
data
. A
file
Glossary-52
Page 55

RT-3020 User Guide
a standard format for
to transmit corrections from a
RTCM allows both
collection and post-processed differential data
collection. RTCM SC-104 (RTCM Special Committee
104) is the most commonly used version of RTCM
message.
RTK see
RTG Real Time GIPSY, a processing technique
developed by NASA’s Jet Propulsion Laboratory to
provide a single set of real time global corrections for
the
S/A see
SBAS (Satellite Based Augmentation System) this is
a more general term, which encompasses
StarFire
Selective Availability (S/A) deliberate degradation of
the
Department of Defense uses
errors, which can cause positions to be inaccurate by as
much as 100 meters.
Signal-to-Noise Ratio (
signal strength.
single-frequency a type of receiver that only uses the
L1
effects.
SNR see
Real-time kinematic
GPS
satellites.
Selective availability
and
GPS
signal by encrypting the
GPS
signal. There is no compensation for ionospheric
EGNOS
signal-to-noise
Differential GPS
corrections used
base station
real-time kinematic (RTK
.
.
type corrections.
P-code
S/A
, the signal contains
SNR
) a measure of a satellite’s
Ratio.
. When the US
to
rovers
) data
WAAS
.
,
Glossary-53
Page 56

RT-3020 User Guide
StarFire a set of real-time global orbit and clock
corrections for
receivers are capable of real-time decimeter positioning
(see Appendix B).
Spread Spectrum Radio (SSR) a radio that uses wide
band, noise like (pseudo-noise) signals that are hard to
detect, intercept, jam, or demodulate making any data
transmitted secure. Because spread spectrum signals are
so wide, they can be transmitted at much lower spectral
power density (Watts per Hertz), than narrow band
transmitters.
SV (Space Vehicle) a
Universal Time Coordinated (
maintained by the US Naval Observatory, based on
local solar mean time at the Greenwich
time is based on
UTC see
WAAS (Wide Area Augmentation System) a set of
corrections for the
Americas region. They incorporate satellite orbit and
clock corrections.
GPS
satellites. StarFire equipped
GPS
satellite.
UTC
UTC
.
Universal time coordinated
GPS
satellites, which are valid for the
) a time standard
meridian. GPS
.
WAD
GPS (Wide Area Differential GPS
GPS
corrections for the
wide geographic area.
WGS-84 (World Geodetic System 1984) the current
standard datum for global positioning and surveying.
The WGS-84 is based on the GRS-80
Y-code the name given to encrypted
U.S. Department of Defense uses
satellites, which are valid for a
) a set of
ellipsoid
P-code
.
when the
selective availability.
Glossary-54
 Loading...
Loading...