


October 24, 2008
LMV1089
Dual Input, Clarisound™ Far Field Noise Suppression
Microphone Amplifier with Automatic Calibration
Capability
LMV1089 Dual Input, Clarisound™ Far Field Noise Suppression Microphone Amplifier with
Automatic Calibration Capability
General Description
The LMV1089 is a fully analog dual differential input, differential output, microphone array amplifier designed to reduce
background acoustic noise, while delivering superb speech
clarity in voice communication applications.
The LMV1089 preserves near-field voice signals within 4cm
of the microphones while rejecting far-field acoustic noise
greater than 50cm from the microphones. Up to 20dB of farfield rejection is possible in a properly configured and calibrated system.
Part of the Powerwise™ family of energy efficient solutions,
the LMV1089 consumes only 1.1mA of supply current providing superior performance over DSP solutions consuming
greater than ten times the power.
A quick calibration during the manufacturing test process of
a product containing the LMV1089 compensates the entire
microphone system. This calibration compensates for mismatch in microphone gain and frequency response, as well
as acoustical path variances. The LMV1089 stores the calibration coefficients in the on-chip EEPROM. The calibration
is initiated by an I2C command or by a logic pin control.
The dual microphone inputs and the processed signal output
are differential to provide excellent noise immunity. The microphones are biased with an internal low-noise bias supply.
Key Specifications
Far Field Noise Suppression Electrical 33dB
■
Supply voltage 2.7V to 5.5V
■
Supply current 1.1mA (typ)
■
Standby current
■
Signal-to-Noise Ratio (A-weighted) 65dB (typ)
■
Total Harmonic Distortion + Noise 0.1% (typ)
■
PSRR (217Hz) 96dB (typ)
■
0.7μA (typ)
Features
Low power consumption
■
Shutdown function
■
No added processing delay
■
Differential outputs
■
Automatic calibration
■
Adjustable 6 - 48dB gain
■
Excellent RF immunity
■
Space-saving 36–bump micro SMD package
■
Applications
Headset and Boom microphones
■
Mobile and handheld two-way radios
■
Bluetooth and other powered headsets
■
Hand-held voice microphones
■
Equalized stereo microphone preamplifier
■
30047240
FIGURE 1.
© 2008 National Semiconductor Corporation 300472 www.national.com

Typical Application
LMV1089
30047201
www.national.com 2
FIGURE 2. Typical Dual Microphone Far Field noise Cancelling Application
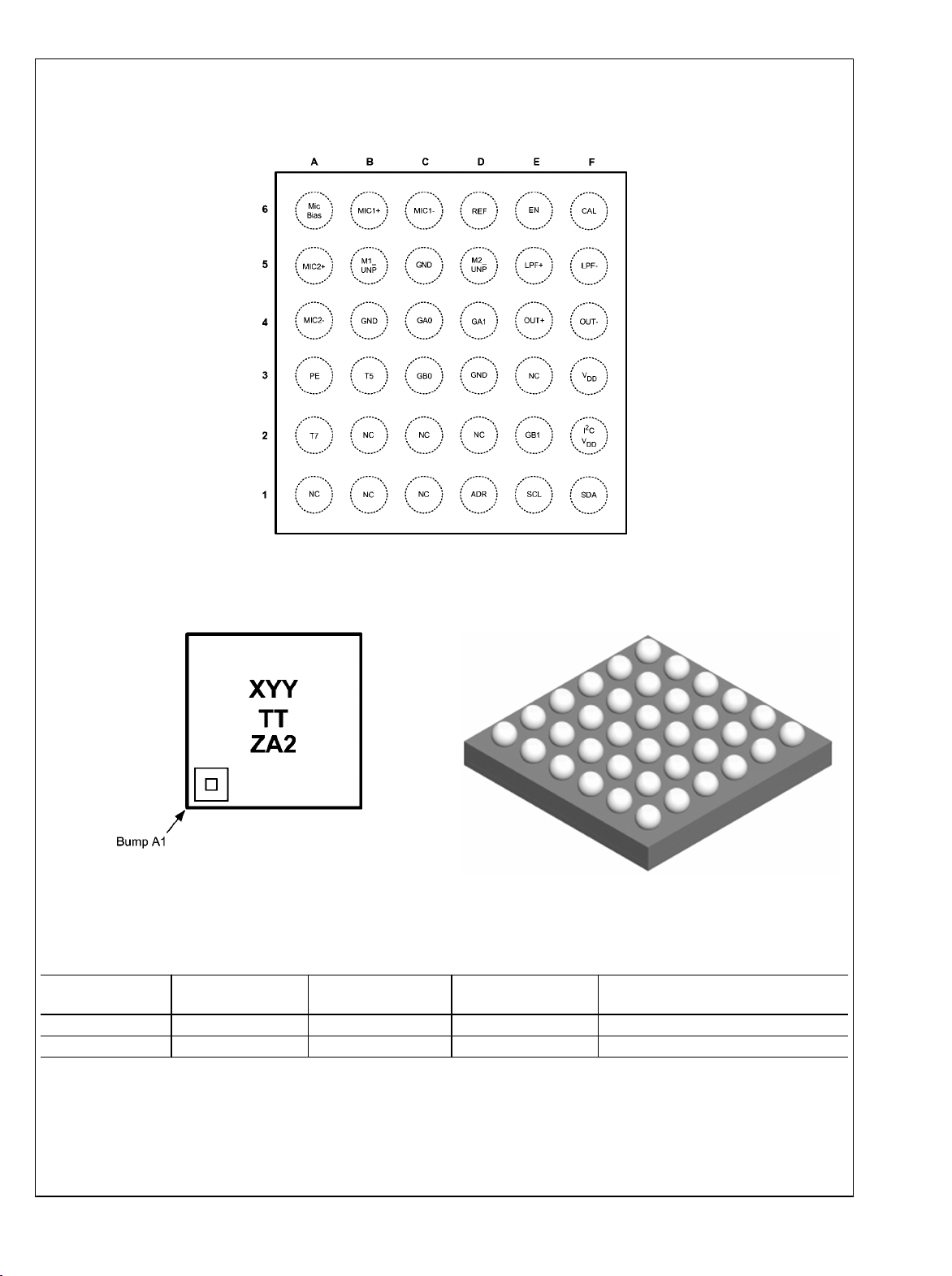
Connection Diagrams
LMV1089
36–Bump micro SMD package
Top View
30047230
Order Number LMV1089RL
See NS Package Number RLA36TTA
36–Bump micro SMD Marking
Top View
X = Plant Code
YY = Date Code
30047231
micro SMD Package View
Bottom View
TT = Die Tracability
ZA2 = LMV1089RL
Ordering Information
Order Number Package
Package Drawing
Number
Device Marking Transport Media
LMV1089RL 36 Bump µSMD RLA36TTA XYYTTZA2 250 units on tape and reel
LMV1089RLX 36 Bump µSMD RLA36TTA XYYTTZA2 1000 units on tape and reel
30047233
3 www.national.com

TABLE 1. Pin Name and Function
LMV1089
Bump Number Pin Name Pin Function Pin Type
A1 NC No connect No Connect
A2 T7
Auxiliary Control Manual Calibration = GND Auto Calibration = V
DD
Digital Input
A3 PE Program Enable EEPROM Digital Input
A4 MIC2– microphone 2 negative input Analog Input
A5 MIC2+ microphone 2 positive input Analog Input
A6 Mic Bias Microphone Bias Analog Output
B1 NC No Connect No Connect
B2 NC No Connect No Connect
B3 T5 Float (do not connect to GND) Production Test
B4 GND amplifier ground Ground
B5 M1_UNP microphone 1 unprocessed output Analog Output
B6 MIC1+ microphone 1 positive input Analog Input
C1 NC No Connect No Connect
C2 NC No Connect No Connect
C3 GB0 default Post Amp Gain 0 Digital Input
C4 GA0 default Pre Amp Gain 0 Digital Input
C5 GND amplifier ground Ground
C6 MIC1– amplifier ground Analog Input
D1 ADR I2C Address select Digital Input
D2 NC No Connect No Connect
D3 GND amplifier ground Ground
D4 GA1 default Pre Amp Gain 1 Digital Input
D5 M2_UNP microphone 2 unprocessed output Analog Output
D6 REF reference voltage de-coupling Analog Reference
E1 SCL I2C clock Digital Input
E2 GB1 default Post Amp Gain 1 Digital Input
E3 NC No Connect No Connect
E4 OUT+ positive optimized audio output Analog Output
E5 LPF+ Low Pass Filter for positive output Analog Input
E6 EN chip enable Digital Input
F1 SDA I2C data Digital Input/Output
F2
F3
I2CV
V
DD
DD
I2C power supply
Supply
power supply Supply
F4 OUT- negative optimized audio output Analog Output
F5 LPF- Low Pass Filter for negative output Analog Input
F6 CAL calibration enable Digital Input
www.national.com 4
LMV1089
Absolute Maximum Ratings (Note 1)
If Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales Office/
Distributors for availability and specifications.
Supply Voltage 6.0V
Storage Temperature -85°C to +150°C
Power Dissipation (Note 3) Internally Limited
ESD Rating (Note 4) 2000V
ESD Rating (Note 5) 200V
Junction Temperature (T
Mounting Temperature
) 150°C
JMAX
235°C
Thermal Resistance
θJA (microSMD)
70°C/W
Soldering Information See AN-112 “microSMD Wafers Level
Chip Scale Package.”
Operating Ratings (Note 2)
Supply Voltage
I2CV
DD
Supply Voltage (Note 8)
Temperature Range −40°C to 85°C
T
≤ TA ≤ T
MIN
MAX
2.7V ≤ V
DD
≤ 5.5V
1.7V ≤ I2CVDD ≤ 5.5V
−40°C ≤ TA ≤ +85°C
Infrared or Convection (20 sec.)
Electrical Characteristics 3.3V (Note 1)
Unless otherwise specified, all limits guaranteed for TJ = 25°C, VDD = 3.3V, VIN = 18mV
(Note 8), Pre Amp gain = 20dB, Post Amp gain = 6dB, RL = 100kΩ, and CL = 4.7pF, C
Symbol Parameter Conditions
SNR Signal-to-Noise Ratio
f = 1kHz, V
f = 1kHz, VIN = 18mV
= 18mV
IN
P-P
, A-Weighted
P-P
voice band (300 – 3400Hz)
Input Referred Noise level A-weighted 5
e
N
VINMaximum Input Signal THD+N < 1%, Pre Amp Gain = 6dB 910 870 mV
Maximum AC Output Voltage
V
OUT
f = 1kHz, Differential Out+, Out-
THD+N < 1%
DC Level at Outputs Out+, Out- 800 mV
THD+N Total Harmonic Distortion + Noise Differential Out+ and Out- 0.1 0.2 % (max)
Z
Input Impedance 155
IN
Z
Z
Output Impedance 300
OUT
Load Impedance (Out+, Out-) R
LOAD
C
LOAD
LOAD
AMMicrophone Preamplifier Gain Range
Microphone Preamplifier Gain Adjustment
A
MR
A
P
A
PR
A
CR
A
MD
X
Talk
T
CAL
FFNS
SNRI
Resolution
Post Amplifier Gain Range Pass Through Mode and Summing Mode 6 – 18 dB
Post Amplifier Gain Resolution 3
Gain Compensation Range ±3 dB
Maximum Gain Matching Difference After
Calibration
Crosstalk Attenuation between Mic1 and Mic2 Measured at M1_UNP and M2_UNP 52 41 dB (min)
Calibration Duration 790
Far Field Noise Suppression Electrical
E
Signal-to-Noise Ratio Improvement Electrical
E
f = 1kHz 2
f = 300Hz
f = 1kHz
f = 3kHz
f = 1kHz (See Test Method)
f = 300Hz (See Test Method)
f = 1kHz (See Test Method)
f = 300Hz (See Test Method)
Input Referred, Input AC grounded
PSRR Power Supply Rejection Ratio
RIPPLE
f
RIPPLE
= 217Hz (V
= 1kHz (V
RIPPLE
RIPPLE
= 100mV
= 100mV
f
CMRR Common Mode Rejection Ratio f = 1kHz 60 dB
, f = 1kHz, EN = VDD, pass through mode
P-P
= 10nF
REF
LMV1089
Typical
(Note 6)
Limits
(Note 7)
(Limits)
63 dB
65 dB
1.2 1.1
10
6 – 36
1.75
2.25
0.5
V
RMS
120
190
kΩ (min)
kΩ (max)
kΩ (min)
100
pF (max)
dB (min)
dB (max)
2.6
3.4
dB (min)
dB (max)
dB
0.25
0.5
ms (max)
27
dBV
33
24
dBV
28
P-P
P-P
)
)
96 85 dB (min)
91 80 dB (min)
Units
μV
RMS
P-P
(min)
Ω
dB
dB
dB
dBV
dBV
(min)
5 www.national.com

V
BM
e
LMV1089
VBM
I
BM
I
DDQ
I
DD
I
SD
I
DDCP
Microphone Bias Supply Voltage
10nF capacitor on V
pin A-Weighted, 10nF cap at V
REF
Total available Microphone Bias Current
Supply Quiescent Current VIN = 0V
Supply Current
Shut Down Current
Supply Current during Calibration and
Programming
I
BIAS
VIN = 25mV
mode
EN pin = GND
Calibrating or Programming EEPROM 30 40 mA (max)
IDDI2C I2C supply current I2C Idle Mode
T
ON
T
OFF
Turn On Time
Turn Off Time
= 1mA
pin 10
REF
both inputs, Noise cancelling
P-P
2.0
1.85
2.15
V (min)
V (max)
μV
RMS
1.2 mA (min)
1.1 1.5 mA (max)
1.1 mA
0.7 1
μA (max)
25 100 nA (max)
40 ms (max)
60 ms (max)
www.national.com 6

Electrical Characteristics 5.0V (Note 1)
Unless otherwise specified, all limits guaranteed for TJ = 25°C, VDD = 5V, VIN = 18mV
Pre Amp gain = 20dB, Post Amp gain = 6dB, RL = 100kΩ, and CL = 4.7pF.
Symbol Parameter Conditions
SNR Signal-to-Noise Ratio
f = 1kHz, V
f = 1kHz, VIN = 18mV
= 18mV
IN
P-P
, A-Weighted
P-P
voice band (300 – 3400Hz)
e
Input Referred Noise level A-weighted 5
N
VINMaximum Input Signal f = 1kHz, THD+N < 1% 918 870 mV
Maximum AC Output Voltage
V
OUT
f = 1kHz, THD+N < 1%
between differential output
DC Output Voltage 800 mV
THD+N
FFNS
SNRI
Total Harmonic Distortion + Noise f = 1kHz VIN = 18mV
Z
Input Impedance 155
IN
Z
Output Impedance 300
OUT
AMMicrophone Preamplifier Gain Range
Microphone Preamplifier Gain Adjustment
A
MR
Resolution
A
Post Amplifier Gain Range
P
Post Amplifier Gain Adjustment Resolution
A
PR
A
Gain Compensation Range f = 1kHz ±3 dB
CR
Maximum Gain Matching Difference After
A
MD
Calibration
T
Calibration Duration 790 ms (max)
CAL
Far Field Noise Suppression Electrical
E
Signal-to-Noise Ratio Improvement Electrical
E
f = 1kHz 6 – 36 dB
f = 1kHz 2
f = 1kHz Pass Through Mode and Summing
Mode
f = 1kHz 3
f = 300Hz
f = 2kHz
f = 3kHz
f = 1kHz (See Test Method)
f = 300Hz (See Test Method)
f = 1kHz (See Test Method)
f = 300Hz (See Test Method)
P-P
Input Referred, Input AC grounded
PSRR Power Supply Rejection Ratio
RIPPLE
f
RIPPLE
= 217Hz (V
= 1kHz (V
RIPPLE
RIPPLE
= 100mV
= 100mV
f
CMRR Common Mode Rejection Ratio f = 1kHz 62 dB
V
Microphone Bias Supply Voltage
BM
10nF capacitor on V
e
VBM
I
Total Available Microphone Bias Current
BM
I
Supply Quiescent Current VIN = 0V
DDQ
Supply Current during Calibration and
I
DDCP
Programming
I
Supply Current
DD
I
Shut Down Current EN pin = GND 1.6
SD
T
Turn On Time
ON
T
Turn Off Time
OFF
pin A-Weighted 10
REF
I
= 1mA
BIAS
Calibrating or Programming EEPROM 30 40 mA (max)
VIN = 25mV
both inputs, Noise cancelling
P-P
mode
, EN = VDD, pass through mode (Note 8),
P-P
LMV1089
Typical Limit
(Limits)
(Note 6) (Note 7)
63 dB
65 dB
1.2 1.1
V
RMS
0.1 0.2 % (max)
120
190
1.75
2.25
kΩ (min)
kΩ (max)
dB (min)
dB (max)
6 – 18 dB
2.6
3.4
dB (min)
dB (max)
0.5
0.25
0.5
27
dBV
33
24
dBV
27
P-P
P-P
)
)
96 85 dB (min)
91 80 dB (min)
2.0 V
1.2 mA (min)
1.1 1.5 mA (max)
1.1 mA (max)
40 ms (max)
60 ms (max)
Units
μV
P-P
dBV
dBV
μV
LMV1089
RMS
(min)
(min)
Ω
dB
dB
dB
RMS
μA
7 www.national.com

Digital Interface Characteristics (Notes 1, 8)
Unless otherwise specified, all limits guaranteed for TJ = 25°C, I2CVDD within the Operating Rating (Note 8)
LMV1089
Symbol Parameter Conditions
V
V
ts
th
ts
PEC
th
PEC
Note 1: “Absolute Maximum Ratings” indicate limits beyond which damage to the device may occur, including inoperability and degradation of device reliability
and/or performance. Functional operation of the device and/or non-degradation at the Absolute Maximum Ratings or other conditions beyond those indicated in
the Recommended Operating Conditions is not implied. The Recommended Operating Conditions indicate conditions at which the device is functional and the
device should not be operated beyond such conditions. All voltages are measured with respect to the ground pin, unless otherwise specified.
Note 2: The Electrical Characteristics tables list guaranteed specifications under the listed Recommended Operating Conditions except as otherwise modified
or specified by the Electrical Characteristics Conditions and/or Notes. Typical specifications are estimations only and are not guaranteed.
Note 3: The maximum power dissipation must be de-rated at elevated temperatures and is dictated by T
allowable power dissipation is P
150°C and the typical θJA for this microSMD package is 70°C/W and for the LLP package θJA is 64°C/W Refer to the Thermal Considerations section for more
information.
Note 4: Human body model, applicable std. JESD22-A114C.
Note 5: Machine model, applicable std. JESD22-A115-A.
Note 6: Typical values represent most likely parametric norms at TA = +25°C, and at the Recommended Operation Conditions at the time of product
characterization and are not guaranteed.
Note 7: Datasheet min/max specification limits are guaranteed by test, or statistical analysis.
Note 8: The voltage at I2CVDD must not exceed the voltage on VDD.
Logic High Input Level
IH
Logic Low Input Level
IL
CAL Setup Time 2 ms
CAL
CAL Hold time until calibration is
CAL
finished
PE Setup Time 2 ms
PE Hold until calibration is finished 790 ms (min)
= (T
DMAX
– TA) / θJA or the number given in the Absolute Maximum Ratings, whichever is lower. For the LMV1089, T
JMAX
EN, TM, SCL, SDA, ADR, CAL, PE
GA0, GA1, GB0, GB1
EN, TM, SCL, SDA, ADR, CAL, PE
GA0, GA1, GB0
790 ms (min)
, θJC, and the ambient temperature TA. The maximum
JMAX
Typical
(Note 6)
LMV1089
(Note 7)
0.75xI2CV
0.6xV
0.25xI2CV
0.4xV
Limit
DD
DD
DD
DD
Units
(Limits)
V (min)
V (max)
=
JMAX
www.national.com 8

Test Methods
LMV1089
30047212
FIGURE 3. FFNSE, NFSLE, SNRIE Test Circuit
FAR FIELD NOISE SUPPRESSION (FFNSE)
For optimum noise suppression the far field noise should be
in a broadside array configuration from the two microphones
(see Figure 15). Which means the far field sound source is
equidistance from the two microphones. This configuration
allows the amplitude of the far field signal to be equal at the
two microphone inputs, however a slight phase difference
may still exist. To simulate a real world application a slight
phase delay was added to the FFNSE test. The block diagram
from Figure 3 is used with the following procedure to measure
the FFNSE.
1.
A sine wave with equal frequency and amplitude
(25mV
generator, the phase of Mic 2 is delayed by 1.1° when
) is applied to Mic1 and Mic2. Using a signal
P-P
compared with Mic1.
2.
Measure the output level in dBV (X)
3.
Mute the signal from Mic2
4.
Measure the output level in dBV (Y)
5.
FFNSE = Y - X dB
NEAR FIELD SPEECH LOSS (NFSLE)
For optimum near field speech preservation, the sound
source should be in an endfire array configuration from the
two microphones (see Figure 16). In this configuration the
speech signal at the microphone closest to the sound source
will have greater amplitude than the microphone further away.
Additionally the signal at microphone further away will experience a phase lag when compared with the closer microphone. To simulate this, phase delay as well as amplitude
shift was added to the NFSLE test. The schematic from Figure
3 is used with the following procedure to measure the NFSLE.
1.
A 25mV
applied to Mic1 and Mic2 respectively. Once again, a
and 17.25mV
P-P
(0.69*25mV
P-P
) sine wave is
P-P
signal generator is used to delay the phase of Mic2 by
15.9° when compared with Mic1.
2.
Measure the output level in dBV (X)
3.
Mute the signal from Mic2
4.
Measure the output level in dBV (Y)
5.
NFSLE = Y - X dB
SINGLE TO NOISE RATIO IMPROVEMENT ELECTRICAL
(SNRIE)
The SNRIE is the ratio of FFNSE to NFSLE and is defined as:
SNRIE = FFNSE - NFSL
E
9 www.national.com

Typical Performance Characteristics Unless otherwise specified, T
= 18mV
LMV1089
, f =1 kHz, pass through mode (Note 8), Pre Amp gain = 20dB, Post Amp gain = 6dB, RL = 100kΩ, and CL = 4.7pF.
P-P
THD+N vs Frequency
Mic1 = AC GND, Mic2 = 36mV
Noise Canceling Mode
P-P
Mic2 = AC GND, Mic1 = 36mV
= 25°C, VDD = 3.3V, Input Voltage
J
THD+N vs Frequency
Noise Canceling Mode
P-P
THD+N vs Frequency
Mic1 = 36mV
Mic1 Pass Through Mode
P-P
THD+N vs Input Voltage
Mic1 = AC GND, f = 1kHz
Mic2 Noise Canceling Mode
30047248
30047249
THD+N vs Frequency
Mic2 = 36mV
Mic2 Pass Through Mode
P-P
THD+N vs Input Voltage
Mic2 = AC GND, f = 1kHz
Mic1 Noise Canceling Mode
30047247
30047250
30047252
www.national.com 10
30047251

LMV1089
THD+N vs Input Voltage
f = 1kHz
Mic1 Pass Through Mode
30047253
PSRR vs Frequency
Pre Amp Gain = 20dB, Post Amp Gain = 6dB
V
= 100mV
RIPPLE
Mic1 Pass Through Mode
, Mic1 = Mic2 = AC GND
P-P
THD+N vs Input Voltage
f = 1kHz
Mic2 Pass Through Mode
30047254
PSRR vs Frequency
Pre Amp Gain = 20dB, Post Amp Gain = 6dB
V
= 100mV
RIPPLE
Mic2 Pass Through Mode
, Mic1 = Mic2 = AC GND
P-P
30047244
PSRR vs Frequency
Pre Amp Gain = 20dB, Post Amp Gain = 6dB
V
RIPPLE
= 100mV
Noise Canceling Mode
, Mic1 = Mic2 = AC GND
P-P
30047245
30047245
Far Field Noise Suppression Electrical vs Frequency
30047255
11 www.national.com

LMV1089
Signal-to-Noise Ratio Electrical vs Frequency
30047256
www.national.com 12

LMV1089
Application Data
INTRODUCTION
The LMV1089 is a fully analog single chip solution to reduce
the far field noise picked up by microphones in a communi-
FIGURE 4. Simplified Block Diagram of the LMV1089
The output signal of the microphones is amplified by a preamplifier with adjustable gain between 6dB and 36dB. In the
analog noise cancelling processor the gain and frequency response of the microphones and acoustical effects of the
enclosure are matched through the auto-calibration function.
After the signals are matched the analog noise cancelling
suppresses the far field noise signal. The output of the analog
noise cancelling processor is amplified in the post amplifier
with adjustable gain between 6dB and 18dB. For optimum
noise and EMI immunity, the microphones have a differential
connection to the LMV1089 and the output of the LMV1089
is also differential. The adjustable gain functions can be controlled via I2C and four control pins. Both methods are described later in the application section.
Power Supply Circuits
A low drop-out (LDO) voltage regulator in the LMV1089 allows
the device to be independent of supply voltage variations.
The Power On Reset (POR) circuitry in the LMV1089 requires
the supply voltage to rise from 0V to VDD in less than 100ms.
The Mic Bias output is provided as a low noise supply source
for the electret microphones. The noise voltage on the Mic
Bias microphone supply output pin depends on the noise voltage on the internal the reference node. The de-coupling
capacitor on the V
internal reference. This capacitor should be larger than 1nF;
having a larger capacitor value will result in a lower noise
voltage on the Mic Bias output.
Most of the logic levels for the digital control interface are relative to I2CVDD voltage. This eases interfacing to the micro
controller of the application containing the LMV1089. The
supply voltage on the I2CVDD pin must never exceed the voltage on the V
Only the four pins that determine the default power up gain
(as described in SETTING ADJUSTABLE GAIN) have logic
levels relative to VDD.
DD
pin determines the noise voltage on this
REF
pin.
Shutdown Function
As part of the Powerwise™ family, the LMV1089 consumes
only 1.1mA of current. In many applications the part does not
need to be continuously operational. To further reduce the
power consumption in the inactive period, the LMV1089 pro-
cation system. A simplified block diagram is provided in
Figure 4.
30047224
vides two individual microphone power down functions. When
either one of the shutdown functions is activated the part will
go into shutdown mode consuming only a few μA of supply
current.
SHUTDOWN VIA HARDWARE PIN
The hardware shutdown function is operated via the EN pin.
In normal operation the EN pin must be at a 'high' level
(VDD). Whenever a 'low' level (GND) is applied to the EN pin
the part will go into shutdown mode disabling all internal circuits.
SHUTDOWN VIA I2C
The LMV1089 offers an additional shutdown function by reprogramming an I2C register (see Table 6). The LMV1089 will
only consume power in a mode where it can perform its normal functions. So at least one of the microphone amplifier
circuits must be enabled ('1'). Writing '0' to the both bit 4 and
bit 5 of the I2C 'A' register (address 0x01h) of the LMV1089
will force the part into shutdown mode, even if the EN pin is
'High', the only part that remains active in this state is the I2C,
which consumes neglectible power when compared to the
standby current.
Adjustable Gain
The LMV1089 has two gain stages where the gain can be
adjusted to meet the requirements for the application. There
is a preamplifier and a post amplifier that can be varied independent of each other. In most applications the gain will be
set via the I2C interface, see Table 6.
SETTING ADJUSTABLE GAIN
The LMV1089 provides four pins to set the default gain settings during power up of the device, which is convenient for
applications without a micro controller . The default gain of the
preamplifier is controlled by the GA0 and GA1 pins and can
be set by wiring those pins to either VDD or GND. In this way,
one of the four possible values in the 12dB to 36dB range (see
Table 2) can be chosen. The default post amplifier gain is set
in the same way by connecting the GB0 and GB1 pins to either VDD or GND to select a gain between 6dB and 15dB (see
Table 3). Setting the gain of the preamplifier and post amplifier
13 www.national.com

via the I2C interface (see Table 6) will override this default
gain.
The default gain is only set during power up of the device.
LMV1089
Toggling the logic level of the enable pin (EN) will not change
the current gain setting of the part. Any gain setting done via
the I2C interface will remain valid during activation of the function.
TABLE 2. Default preamplifier gain
GA1 GA0 Gain
0 0 12dB
0 1 20dB (Note 9)
1 0 28dB
1 1 36dB
Gain Balance and Gain Budget
In systems where input signals have a high dynamic range,
critical noise levels or where the dynamic range of the output
voltage is also limited, careful gain balancing is essential for
the best performance. Too low of a gain setting in the preamplifier can result in higher noise levels while too high of a gain
TABLE 3. Default post amplifier gain
GB1 GB0 Gain
0 0 6dB (Note 9)
0 1 9dB
1 0 12dB
1 1 15dB
Note 9: Default value used for performance measurements
setting in the preamplifier will result in clipping and saturation
in the noise cancelling processor and output stages.
The gain ranges and maximum signal levels for the different
functional blocks are shown in Figure 5. Two examples are
given as a guideline on how to select proper gain settings.
FIGURE 5. Maximum Signal Levels
Example 1
An application using microphones with 50mV
output voltage, and a baseband chip after the LMV1089 with
1.5V
maximum input voltage.
P-P
maximum
P-P
For optimum noise performance, the gain of the input stage
should be set to the maximum.
1.
50mV
2.
3.1V
the Noise Cancelling Processor (NCP). This means a
+36 dB = 3.1V
P-P
is higher than the maximum 1.4V
P-P
P-P
.
allowed for
P-P
gain lower than 28.9dB should be selected.
3.
Select the nearest lower gain from the gain settings
shown in Table 2, 28dB is selected. This will prevent the
NCP from being overloaded by the microphone. With this
setting, the resulting output level of the Pre Amplifier will
be 1.26V
4.
The NCP can have a maximum processing gain of 9dB
P-P
.
(depending on the calibration result) which will result in
www.national.com 14
30047241
3.5V
at the output of the LMV1089. This level is higher
P-P
then maximum level that is allowed at the input of the post
amp of the LMV1089. Therefore the preamp gain has to
be reduced, to 1.4V
the preamp gain to a maximum of 20dB.
5.
The baseband chip limits the maximum output voltage to
1.5V
with the minimum of 6dB post amp gain, this
P-P
results in requiring a lower level at the input of the post
amp of 0.75V
NCP gain of 9dB the output of the preamp must be
<266mV
6.
Calculating the new gain for the preamp will result in
P-P
P-P
.
minus 9dB = 0.5V
P-P
. This limits
P-P
. Now calculating this for a maximum
<1.4dB gain.
7.
The nearest lower gain will be 14dB.
So using preamp gain = 14dB and postamp gain = 6dB is the
optimum for this application.

Example 2
An application using microphones with 10mV
output voltage, and a baseband chip after the LMV1089 with
3.3V
maximum input voltage.
P-P
maximum
P-P
For optimum noise performance we would like to have the
maximum gain at the input stage.
1.
10mV
2.
This is lower than the maximum 1.4V
3.
The NCP can have a maximum processing gain of 9dB
+ 36dB = 631mV
P-P
P-P
.
so this is OK.
P-P
(depending on the calibration result) which will result in
3.5V
at the output of the LMV1089. This level is higher
P-P
then maximum level that is allowed at the input of the
Post Amp of the LMV1089. Therefore the Pre Amp gain
has to be reduced, to 1.4V
limits the Pre Amp gain to a maximum of 34dB.
4.
With a Post Amp gain setting of 6dB the output of the
Post Amp will be 2.8V
5.
The nearest lower Post Amp gain will be 6dB.
minus 9dB = 0.5V
P-P
which is OK for the baseband.
P-P
P-P
. This
So using preamp gain = 34dB and postamp gain = 6dB is
optimum for this application.
Unprocessed Output Pins
The LMV1089 provides two single ended output pins
M1_UNP and M2_UNP. These pins provide the amplified
output signal from the two differential microphone input amplifiers Mic1 and Mic2. When the application containing the
LMV1089 is in a calibrated state the output level of the two
microphone paths are matched. This makes these outputs
suitable for stereo applications like video camera webcams
and photo cameras. Low cost microphones with wider gain
tolerance can be used because gain differences of the microphones will be compensated by the calibration system of
the LMV1089. In this situation the default gain of the Pre Amplifiers is set by GA0 and GA1 as described in Table 2. This
gain can be changed via I2C by writing register A as described
in the I2C Compatible Interface section.
I2C Compatible Interface
I2C SIGNALS
The LMV1089 pin Serial Clock (SCL) pin is used for the I2C
clock and the Serial Data (SDA) pin is used for the I2C data.
Both these signals need a pull-up resistor according to I2C
specification. The LMV1089 can be controlled through two
slave addresses. The digital I2C address pin selects the I2C
address for LMV1089 as shown inTable 4 .
TABLE 4. Chip Address
D7 D6 D5 D4 D3 D2 D1 D0
1st Chip
Address
I2C
Adress='0'
2nd Chip
Address
I2C
Adress='1'
1 1 0 0 1 1 0 W/R
1 1 0 0 1 1 1 W/R
I2C Signals: Data Validity
300472q1
I2C START AND STOP CONDITIONS
START and STOP bits classify the beginning and the end of
the I2C data transmission session. START condition is defined as the SDA signal transitioning from HIGH to LOW while
SCL line is HIGH. STOP condition is defined as the SDA transitioning from LOW to HIGH while SCL is HIGH. The I2C
master always generates START and STOP bits. The I2C bus
is considered to be busy after START condition and free after
STOP condition. During data transmission, I2C master can
generate repeated START conditions. First START and repeated START conditions are equivalent, function-wise.(Note
10)
I2C Start Stop Conditions
Note 10: The master should issue STOP after no acknowledgment.
300472q2
TRANSFERRING DATA
Every byte put on the SDA line must be eight bits long, with
the most significant bit (MSB) being transferred first. Each
byte of data has to be followed by an acknowledge bit. The
acknowledge related clock pulse is generated by the master.
The transmitter releases the SDA line (HIGH) during the acknowledge clock pulse. The receiver must pull down the SDA
line during the 9th clock pulse, signifying an acknowledge
(ACK). A receiver which has been addressed must generate
an acknowledge after each byte has been received.
After the START condition, the I2C master sends a chip address. This address is seven bits long followed by an eighth
bit which is a data direction bit (R/W). The LMV1089 address
is 110011002 or 110011102. For the eighth bit, a “0” indicates
a WRITE and a “1” indicates a READ. The second byte selects the register to which the data will be written. The third
byte contains data to write to the selected register.
LMV1089
I2C DATA VALIDITY
The data on SDA line must be stable during the HIGH period
of the clock signal (SCL). In other words, the state of the data
line can only be changed when SCL is LOW.
I2C Chip Address
15 www.national.com
300472q3

Register changes take effect at the SCL rising edge during
the last ACK from slave.
LMV1089
In Figure 6, a write example is shown, for a device with a randomly chosen address'001101002'.
w = write (SDA = “0”)
r = read (SDA = “1”)
ack = acknowledge (SDA pulled down by slave)
rs = repeated start
FIGURE 6. Example I2C Write Cycle
When a READ function is to be accomplished, a WRITE function must precede the READ function, as shown in the Read
FIGURE 7. Example I2C Read Cycle
300472q5
Cycle waveform. Figure 7 shows this read example for a randomly chosen address'001101012.
300472q6
FIGURE 8. I2C Timing Diagram
www.national.com 16
300472q9

TABLE 5. I2C Timing Paramters
LMV1089
Symbol Parameter
Limit
Min Max
1 Hold Time (repeated) START Condition 0.6 µs
2 Clock Low Time 1.3 µs
3 Clock High Time 600 ns
4 Setup Time for a Repeated START Condition 600 ns
5 Data Hold Time (Output direction, delay generated by LMV1089) 300 1100 ns
5 Data Hold Time (Input direction, delay generated by the Master) 0 1100 ns
6 Data Setup Time 300 ns
7 Rise Time of SDA and SCL 20 300 ns
8 Fall Time of SDA and SCL 15 300 ns
9 Set-up Time for STOP condition 600 ns
10 Bus Free Time between a STOP and a START Condition 1.3 µs
C
NOTE: Data guaranteed by design
Capacitive Load for Each Bus Line 10 200 pF
b
TABLE 6. I2C Register Description
Address Reg. Bits Description Default
Microphone preamplifier gain from 6dB up to 36dB in 2dB steps.
0000 6dB
0001 8dB
0010 10dB
0011 12dB
0100 14dB
0101 16dB
0110 18dB
A [3:0]
0111 20dB
1000 22dB
0x01h
1001 24dB
1010 26dB
1011 28dB
1100 30dB
1101 32dB
1110 34dB
1111 36dB
A [5:4]
A [7:6]
A4 = mute mic1 and A5 = mute mic2.
( 0 = microphone on)
Mic enable bits, A6 = enable Mic1, A7 = enable Mic2
(1 = enable), A6 and A7 both 0 = Shutdown Mode
Units
See Table 2
00(on)
11(on)
17 www.national.com

Address Reg. Bits Description Default
LMV1089
Gain setting for the post amplifier from (3dB steps)
000 6db
001 9dB
010 12dB
B [2:0]
0x02h
B [4:3]
B [7:5] Not Used 000
0x0Ch L [7:0] reads the output of the EEPROM read only
0x0Dh M [7:0] reads the output of the EEPROM read only
N [6:0] reads the output of the EEPROM read only
0x0Efh
N [7]
011 15dB
100 18dB
101 18dB
110 18dB
111 18dB
Mic select bits
0 0 Noise cancelling mode
0 1 Only Mic1 enabled
1 0 Only Mic2 enabled
1 1 Mic1 + Mic2
Reads the “ready” signal. This give the status of the program cycle.
1 = ready ; 0 = program cycle in progress
See Table 3
00
read only
www.national.com 18

Address Reg. Bits Description Default
[3:0] Control the gain compensation between the two mics at 3kHz
0000 (0) 0.0dB
0001 (1) 0.5dB
0010 (2) 1.0dB
0011 (3) 1.5dB
0100 (4) 2.0dB
0101 (5) 2.5dB
0110 (6) 3.0dB
0x0Fh O
0111 (7) 3.0dB
1000 (8) 0dB
1001 (9) –0.5dB
1010 (A) –1.0dB
1011 (B) –1.5dB
1100 (C) –2.0dB
1110 (D) –2.5dB
1110 (E) –3.0dB
1111 (F) –3.0dB
[7:4] Control the gain compensation between the two mics at 300Hz
0000 (0) 0.0dB
0001 (1) 0.5dB
0010 (2) 0.0dB
0011 (3) 1.5dB
0100 (4) 2.0dB
0101 (5) 2.5dB
0110 (6) 3.0dB
0111 (7) 3.0dB
1000 (8) 0dB
1001 (9) –0.5dB
1010 (A) –1.0dB
1011 (B) –1.5dB
1100 (C) –2.0dB
1101 (D) –2.5dB
1110 (E) –3.0dB
1111 (F) –3.0dBd
0000
0000
LMV1089
19 www.national.com

Address Reg. Bits Description Default
LMV1089
0x10h P
0x11h Q
0x12h R
[3:0] Control compensation gain for left channel at ALL frequencies
0000 (0) –3.0dB
0001 (1) –3.0dB
0010 (2) –2.5dB
0011 (3) –2.0dB
0100 (4) –1.5dB
0101 (5) –1.0dB
0110 (6) –0.5dB
0111 (7) 0.0dB
1000 (8) 0.0dB
1001 (9) 0.5dB
1010 (A) 1.0dB
1011 (B) 1.5dB
1100 (C) 2.0dB
1101 (D) 2.5dB
1110 (E) 3.0dB
1111 (F) 3.0dB
[7:4] Control compensation gain for right channel at ALL frequencies
0000 (0) –3.0dB
0001 (1) –3.0dB
0010 (2) –2.5dB
0011 (3) –2.0dB
0100 (4) –1.5dB
0101 (5) –1.0dB
0110 (6) –0.5dB
0111 (7) 0.0dB
1000 (8) 0.0dB
1001 (9) 0.5dB
1010 (A) 1.0dB
1011 (B) 1.5dB
1100 (C) 2.0dB
1101 (D) 2.5dB
1110 (E) 3.0dB
1111 (F) 3.0dB
[6:0] Values are clocked into EEPROM registers once “newdata” pulse is generated
StoreBar signal
[7]
StoreBar = 0 enables EEPROM programming
StoreBar = 1 data clock into EEPROM registers
[0] Start Calibration via I2C ‘0’ to ‘1’ = start calibration (keep ‘1’ during calibration) 0
[7] Internal test 0000000
1111
1111
1
www.national.com 20

LMV1089
Calibration
Automatic calibration should only be required once, when the
product containing the LMV1089 has completed manufacture, and prior to application packaging. The product containing the LMV1089 will be calibrated to the microphones, the
microphone spacings, and the acoustical properties of the final design.
The compensation or calibration technology is achieved via
memory stored coefficients when the FFNS circuitry activates
the calibration sequence. The purpose of the calibration sequence is to choose the optimized coefficients for the FFNS
circuitry for the given microphones, spacing, and acoustical
design of the product containing the LMV1089.
A basic calibration can be performed with a single 1kHz tone,
however to take full advantage of this calibration feature a
three tone calibration (See PERFORMING A THREE TONE
CALIBRATION) is preferred .
The automatic calibration process can be initiated from either
a digital interface CALIBRATE pin (CAL) or via the I2C interface.
The logic level at the PROGRAM ENABLE (PE) pin determines if the result of the calibration is volatile or permanent.
To make the result of the calibration permanent (stored in the
EEPROM) the PROGRAM ENABLE (PE) pin must be high
during the automatic calibration process.
AUTOMATIC CALIBRATION VIA CAL PIN
To initiate the automatic calibration via the CAL pin, the following procedure is required. See timing diagram Figure 11:
•
From the initial condition where both PE and CAL are at
'low' level
•
bring PE to a 'high' level (enable EEprom write)
•
bring CAL to a 'high' level to start Calibration
•
Apply Audio stimulus (single tone 1kHz or three tone
sequence as described in PERFORMING A THREE
TONE CALIBRATION) (see Figure 12).
•
Hold CAL 'high' for at least 790ms
•
Remove Audio stimulus
•
bring CAL to a 'low' level to stop Calibration
•
bring PE to a 'low' level (disable EEprom write)
A tone may be applied prior to the rising of CAL and PE. Signals applied to the microphone inputs before rising of CAL
and PE are ignored by the calibration system.
FIGURE 9. Automatic Calibration via CAL pin
Note:
When the I2C is operated, make sure that register 'R' (address
0x12) bit 0 is '0' before operating the CAL pin (default value for
this bit). When this bit is set '1' the calibration engine of the
LMV1089 is started and will remain active with a higher supply
300472r1
current than normal operation. The state of the calibration remains active until this bit is reset, '0”. With the bit set the 'low'
to' high' transfer of the CAL pin will be ignored.
21 www.national.com

AUTOMATIC CALIBRATION VIA I2C COMMAND
To initiate the automatic calibration via the I2C interface, the
following procedure is required:
LMV1089
•
From the initial condition where PE is 'low' level
•
Bring PE to a 'high' level (enable EEprom write)
•
Write '1' into I2C register 'R' (address 0x12) bit 0 to start
calibration
•
Apply Audio stimulus (single tone 1kHz or three tone
sequence as described in PERFORMING A THREE
TONE CALIBRATION)
•
•
•
•
A tone may be applied prior to the rising of PE or setting the
I2C calibration bit . Signals applied to the microphone inputs
before rising of PE or setting the I2C calibration bit are ignored
by the calibration system.
FIGURE 10.
Wait at least 790ms
Remove Audio stimulus
Write '0' into I2C to finish calibration
Bring PE to a 'low' level (disable EEprom write)
300472r2
PERFORMING THE AUTOMATIC CALIBRATION
Automatic calibration can be performed as 'one tone' or as
'three tone' calibration. Three tone calibration is preferred because the three tone calibration not only compensates for
differences in the gain between the two microphones, but this
function also corrects for differences in the frequency response between in the two microphones and compensates
for the acoustical effects of the enclosure.
The one tone calibration only compensates for the gain difference between the two microphones at 1kHz and can lead
to less far field noise reduction when compared to three tone
calibration.
PERFORMING A ONE TONE CALIBRATION
The easiest way to perform an automatic calibration with the
LMV1089 uses a 1kHz tone. This tone can be a steady state
tone or a 1kHz tone that is switched on and off using the timing
from Figure 11.
To perform a one tone calibration, a 1kHz test tone is required
right after the PE and CAL inputs are brought to a logic high
level and that tone should be stable during the time as indicated in Table 7. At the end of this sequence the calibration
data is automatically stored in the internal EEPROM (see Figure 12).
A tone may be applied prior to the rising of CAL start signal
and PE. Signals applied to the microphone outside the limits
shown in Figure 11 and Table 7 are ignored by the calibration
system.
FIGURE 11. One Tone Calibration Timing
www.national.com 22
300472r4

LMV1089
PERFORMING A THREE TONE CALIBRATION
In a system with two microphones in an enclosure there will
always be a difference in the transfer function in both gain and
frequency response between the two channels. The
LMV1089 has the capability to perform an automatic calibration function to minimize these differences. To perform this
calibration, a test sequence of three tones is required right
after the PE and CAL inputs are brought to a logic high level.
At the end of this sequence the calibration data is automatically stored in the internal EEPROM.
The three tones have to be applied as follows (see Figure 12):
•
A first tone with a frequency of 1kHz
•
A second tone with a frequency of 300Hz
•
A third tone with a frequency of 3kHz
A tone may be applied prior to the rising of CAL start signal
and PE. Signals applied to the microphone outside the limits
shown in Figure 12 and Table 7 are ignored by the calibration
system.
Between each tone pair there is a small time, indicated by a
cross, to change the frequency. During that time the input tone
is ignored by the calibration system.
The total calibration sequence requires less than 790ms.
TABLE 7. Automatic Calibration Timing Parameters
Symbol Parameter
t
ST1
t
ET1
t
ST2
t
ET2
t
ST3
t
ET3
t
CC
NOTE: Data guaranteed by design
Calibration Start Tone 1 10 ms
Calibration End Tone 1 200 ms
Calibration Start Tone 2 210 ms
Calibration End Tone 2 400 ms
Calibration Start Tone 3 410 ms
Calibration End Tone 3 600 ms
Calibration Complete 790 ms
FIGURE 12. Calibration Timing
Limits
Min Max
300472r3
Unitis
23 www.national.com

AUTOMATIC CALIBRATION SETUP
A calibration test setup consists of a test room (acoustical
box) with a loudspeaker (acoustical source) driven with the
LMV1089
test tone sequence from Figure 12. The test setup is shown
in Figure 13. The distances between the source and microphone 1 and microphone 2 must be equal and the sound must
travel without any obstacle from source to both microphones.
The sound will travel with the limited speed of 300m/s from
the loudspeaker source to the microphones. When creating
the calibration signals this time should not be ignored, 30cm
distance will cause 1ms delay.
For an optimum automatic calibration the output level of the
microphones and preamp gain must be set so that the resulting signal at the output of the preamplifier is 100mV
P-P
± 6dB
FIGURE 13. Calibration Test setup
MANUAL CALIBRATION
You can manually program the gain compensation of the two
mic inputs on the LMV1089 using the I2C interface. Table 5
shows the control bits for I2C Register O and P with the corresponding gains. This can be easily done by doing the
following:
1) READ contents of the I2C register N immediately after
powering up.
2) Set PE pin and T7 pin to Vdd.
3) WRITE to I2C register O and P to choose the calibration
settings.
30047235
Bits O<7:4> control the two mics at 300Hz and bits
O<3:0> control the two mics at 3kHz.
Bits P<7:4> control the right channel gain and bits
P<3:0> control the left channel gain
4) WRITE a ‘0’ to I2C register Q<7> bit (storeBar) and the
bits from I2C register N<6:0> to I2C register Q<6:0>
5) When I2C register N<7> (ready) goes high, then the
EEPROM programming is complete. Now PE pin and T7 pin
should be set to GND and I2C register Q<7> (storeBar) should
be returned to ‘1’.
www.national.com 24

LMV1089
SUPPLY CURRENT DURING CALIBRATION
The calibration function performs two main tasks in a sequence. First the AC characteristics of the microphones are
matched. Then in the second stage, if the PE pin is high, the
on-chip EEPROM is programmed.
During the first stage of this sequence the supply current on
the LMV1089 will increase to about 2.5mA. During the writing
of the EEPROM the supply current will rise for about 215 ms
to about 30mA. This increased current is used for the on chip
charge pump which generates the high voltages that are required for programming the EEPROM.
30047236
Microphone Placement
Because the LMV1089 is a microphone array Far Field Noise
Reduction solution, proper microphone placement is critical
for optimum performance. Two things need to be considered:
The spacing between the two microphones and the position
of the two microphones relative to near field source
If the spacing between the two microphones is too small, near
field speech will be canceled along with the far field noise.
Conversely, if the spacing between the two microphones is
large, the far field noise reduction performance will be degraded. The optimum spacing between Mic 1 and Mic 2 is
1.5-2.5cm. This range provides a balance of minimal near
field speech loss and maximum far field noise reduction.
If the spacing between the two microphones is too small near
field speech will be canceled along with the far field noise.
Conversely, if the spacing between the two microphones is
large, the far field noise reduction performance will be degraded. The optimum spacing between Mic 1 and Mic 2 is
1.5-2.5cm. This range provides a balance of minimal near
field speech loss and maximum far field noise reduction. The
microphones should be in line with the desired sound source
'near speech' and configured in an endfire array (seeFigure
16) orientation from the sound source. If the 'near speech' (desired sound source) is equidistant to the source like a broadside array (seeFigure 15) the result will be a great deal of near
field speech loss.
FIGURE 14. Supply current during calibration and
programming
FIGURE 15. Broadside Array (WRONG)
30047243
25 www.national.com

LMV1089
30047242
FIGURE 16. Endfire Array (CORRECT)
Low-Pass Filter At The Output
At the output of the LMV1089 there is a provision to create a
1st order low-pass filter (only enabled in 'Noise Cancelling'
mode). This low-pass filter can be used to compensate for the
change in frequency response that results from the noise
cancellation process. The change in frequency response resembles a first-order high-pass filter, and for many of the
applications it can be compensated by a first-order low-pass
filter with cutoff frequency between 1.5kHz and 2.5kHz.
The transfer function of the low-pass filter is derived as:
This low-pass filter is created by connecting a capacitor between the LPF pin and the OUT pin of the LMV1089. The
value of this capacitor also depends on the selected output
gain. For different gains the feedback resistance in the lowpass filter network changes as shown in Table 8.
TABLE 8. Low-Pass Filter Internal Impedance
Post Amplifier Gain
Setting (dB )in Pass
Through mode
6 20
9 29
12 40
15 57
18 80
This will result in the following values for a cutoff frequency of
2000 Hz:
Feedback Resistance R
(kΩ)
f
Measurement Setup
Because of the nature of the calibration system it is not possible to predict the absolute gain in the two microphone
channels of the Far Field Noise Cancelling System. This is
because, after the calibration function has been operated, the
noise cancelling circuit will compensate for the difference in
gain between the microphones. In Noise Cancelling mode,
this can result in a final gain offset of max 3dB between the
gain set in the registers (A[3:0] and B[2:0]) and the actual
measured gain between input and output of the LMV1089.
After performing a calibration the frequency characteristic of
the microphone channels will be matched for the two microphones. As a result of this matching there can be a slight slope
in the frequency characteristic in one or both amplifiers.
A-WEIGHTED FILTER
The human ear is sensitive for acoustic signals within a frequency range from about 20Hz to 20kHz. Within this range
the sensitivity of the human ear is not equal for each frequency. To approach the hearing response, weighting filters are
introduced. One of those filters is the A-weighted filter.
The A-weighted filter is used in signal to noise measurements,
where the wanted audio signal is compared to device noise
and distortion.
The use of this filter improves the correlation of the measured
values to the way these ratios are perceived by the human
ear.
TABLE 9. Low-Pass Filter Capacitor For 2kHz
Post Amplifier Gain Setting (dB)
6 20 3.9
9 29 2.7
12 40 2.0
15 57 1.3
18 80 1.0
www.national.com 26
Rf (kΩ)
Cf (nF)

FIGURE 17. A-Weighted Filter
LMV1089
MEASURING NOISE AND SNR
The overall noise of the LMV1089 is measured within the frequency band from 10Hz to 22kHz using an A-weighted filter.
The Mic+ and Mic- inputs of the LMV1089 are AC shorted
between the input capacitors, see Figure 18.
30047210
FIGURE 18. Noise Measurement Setup
For the signal to noise ratio (SNR) the signal level at the output is measured with a 1kHz input signal of 18mV
A-weighted filter. This voltage represents the output voltage
using an
P-P
of a typical electret condenser microphone at a sound pressure level of 94dB SPL, which is the standard level for these
measurements. The LMV1089 is programmed for 26dB of to-
Revision History
Rev Date Description
1.0 09/24/08 Initial release.
1.01 09/30/08 Text edits.
1.02 10/14/08 Text edits.
1.03 10/24/08 Text edits.
30047211
tal gain (20dB preamplifier and 6dB postamplifier) with only
Mic1 or Mic2 used. (See also I2C Compatible Interface).
The input signal is applied differentially between the Mic+ and
Mic-. Because the part is in Pass Through mode the low-pass
filter at the output of the LMV1089 is disabled.
27 www.national.com

Physical Dimensions inches (millimeters) unless otherwise noted
LMV1089
36 Bump micro SMD Technology
X1 = 3.459±0.03(mm), X2 = 3.459(mm)±0.03, X3 = 0.66±0.075(mm)
NS Package Number RLA36TTA
www.national.com 28

LMV1089
29 www.national.com

Notes
For more National Semiconductor product information and proven design tools, visit the following Web sites at:
Products Design Support
Amplifiers www.national.com/amplifiers WEBENCH www.national.com/webench
Audio www.national.com/audio Analog University www.national.com/AU
Clock Conditioners www.national.com/timing App Notes www.national.com/appnotes
Data Converters www.national.com/adc Distributors www.national.com/contacts
Displays www.national.com/displays Green Compliance www.national.com/quality/green
Ethernet www.national.com/ethernet Packaging www.national.com/packaging
Interface www.national.com/interface Quality and Reliability www.national.com/quality
LVDS www.national.com/lvds Reference Designs www.national.com/refdesigns
Power Management www.national.com/power Feedback www.national.com/feedback
Automatic Calibration Capability
Switching Regulators www.national.com/switchers
LDOs www.national.com/ldo
LED Lighting www.national.com/led
PowerWise www.national.com/powerwise
Serial Digital Interface (SDI) www.national.com/sdi
Temperature Sensors www.national.com/tempsensors
Wireless (PLL/VCO) www.national.com/wireless
THE CONTENTS OF THIS DOCUMENT ARE PROVIDED IN CONNECTION WITH NATIONAL SEMICONDUCTOR CORPORATION
(“NATIONAL”) PRODUCTS. NATIONAL MAKES NO REPRESENTATIONS OR WARRANTIES WITH RESPECT TO THE ACCURACY
OR COMPLETENESS OF THE CONTENTS OF THIS PUBLICATION AND RESERVES THE RIGHT TO MAKE CHANGES TO
SPECIFICATIONS AND PRODUCT DESCRIPTIONS AT ANY TIME WITHOUT NOTICE. NO LICENSE, WHETHER EXPRESS,
IMPLIED, ARISING BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS
DOCUMENT.
TESTING AND OTHER QUALITY CONTROLS ARE USED TO THE EXTENT NATIONAL DEEMS NECESSARY TO SUPPORT
NATIONAL’S PRODUCT WARRANTY. EXCEPT WHERE MANDATED BY GOVERNMENT REQUIREMENTS, TESTING OF ALL
PARAMETERS OF EACH PRODUCT IS NOT NECESSARILY PERFORMED. NATIONAL ASSUMES NO LIABILITY FOR
APPLICATIONS ASSISTANCE OR BUYER PRODUCT DESIGN. BUYERS ARE RESPONSIBLE FOR THEIR PRODUCTS AND
APPLICATIONS USING NATIONAL COMPONENTS. PRIOR TO USING OR DISTRIBUTING ANY PRODUCTS THAT INCLUDE
NATIONAL COMPONENTS, BUYERS SHOULD PROVIDE ADEQUATE DESIGN, TESTING AND OPERATING SAFEGUARDS.
EXCEPT AS PROVIDED IN NATIONAL’S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, NATIONAL ASSUMES NO
LIABILITY WHATSOEVER, AND NATIONAL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY RELATING TO THE SALE
AND/OR USE OF NATIONAL PRODUCTS INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR
PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY
RIGHT.
LIFE SUPPORT POLICY
NATIONAL’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES OR
SYSTEMS WITHOUT THE EXPRESS PRIOR WRITTEN APPROVAL OF THE CHIEF EXECUTIVE OFFICER AND GENERAL
COUNSEL OF NATIONAL SEMICONDUCTOR CORPORATION. As used herein:
Life support devices or systems are devices which (a) are intended for surgical implant into the body, or (b) support or sustain life and
whose failure to perform when properly used in accordance with instructions for use provided in the labeling can be reasonably expected
to result in a significant injury to the user. A critical component is any component in a life support device or system whose failure to perform
can be reasonably expected to cause the failure of the life support device or system or to affect its safety or effectiveness.
National Semiconductor and the National Semiconductor logo are registered trademarks of National Semiconductor Corporation. All other
brand or product names may be trademarks or registered trademarks of their respective holders.
Copyright© 2008 National Semiconductor Corporation
For the most current product information visit us at www.national.com
LMV1089 Dual Input, Clarisound™ Far Field Noise Suppression Microphone Amplifier with
www.national.com
National Semiconductor
Americas Technical
Support Center
Email: support@nsc.com
Tel: 1-800-272-9959
National Semiconductor Europe
Technical Support Center
Email: europe.support@nsc.com
German Tel: +49 (0) 180 5010 771
English Tel: +44 (0) 870 850 4288
National Semiconductor Asia
Pacific Technical Support Center
Email: ap.support@nsc.com
National Semiconductor Japan
Technical Support Center
Email: jpn.feedback@nsc.com
 Loading...
Loading...