

LMD18201
3A, 55V H-Bridge
General Description
The LMD18201 is a 3A H-Bridge designed for motion control
applications. The device is built using a multi-technology
process which combines bipolar and CMOS control circuitry
with DMOS power devices on the same monolithic structure.
The H-Bridge configuration is ideal for driving DC and stepper motors. The LMD18201 accommodates peak output
currents up to 6A. Current sensing can be achieved via a
small sense resistor connected in series with the power
ground lead. For current sensing without disturbing the path
of current to the load, the LMD18200 is recommended.
Features
n Delivers up to 3A continuous output
n Operates at supply voltages up to 55V
n Low R
typically 0.33Ω per switch
DS(ON)
LMD18201 3A, 55V H-Bridge
October 2000
n TTL and CMOS compatible inputs
n No “shoot-through” current
n Thermal warning flag output at 145˚C
n Thermal shutdown (outputs off) at 170˚C
n Internal clamp diodes
n Shorted load protection
n Internal charge pump with external bootstrap capability
Applications
n DC and stepper motor drives
n Position and velocity servomechanisms
n Factory automation robots
n Numerically controlled machinery
n Computer printers and plotters
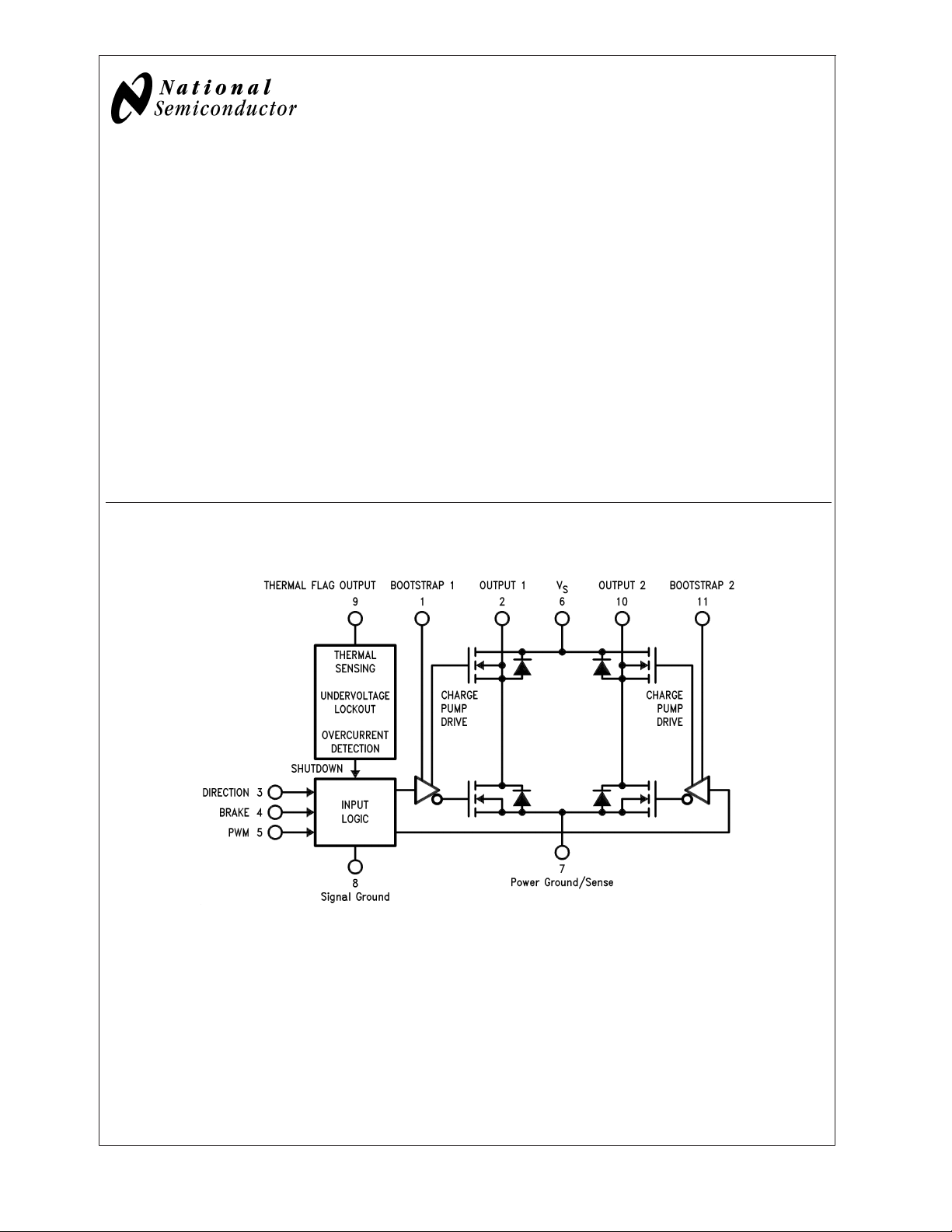
Functional Diagram
01079301
FIGURE 1. Functional Block Diagram of LMD18201
© 2004 National Semiconductor Corporation DS010793 www.national.com
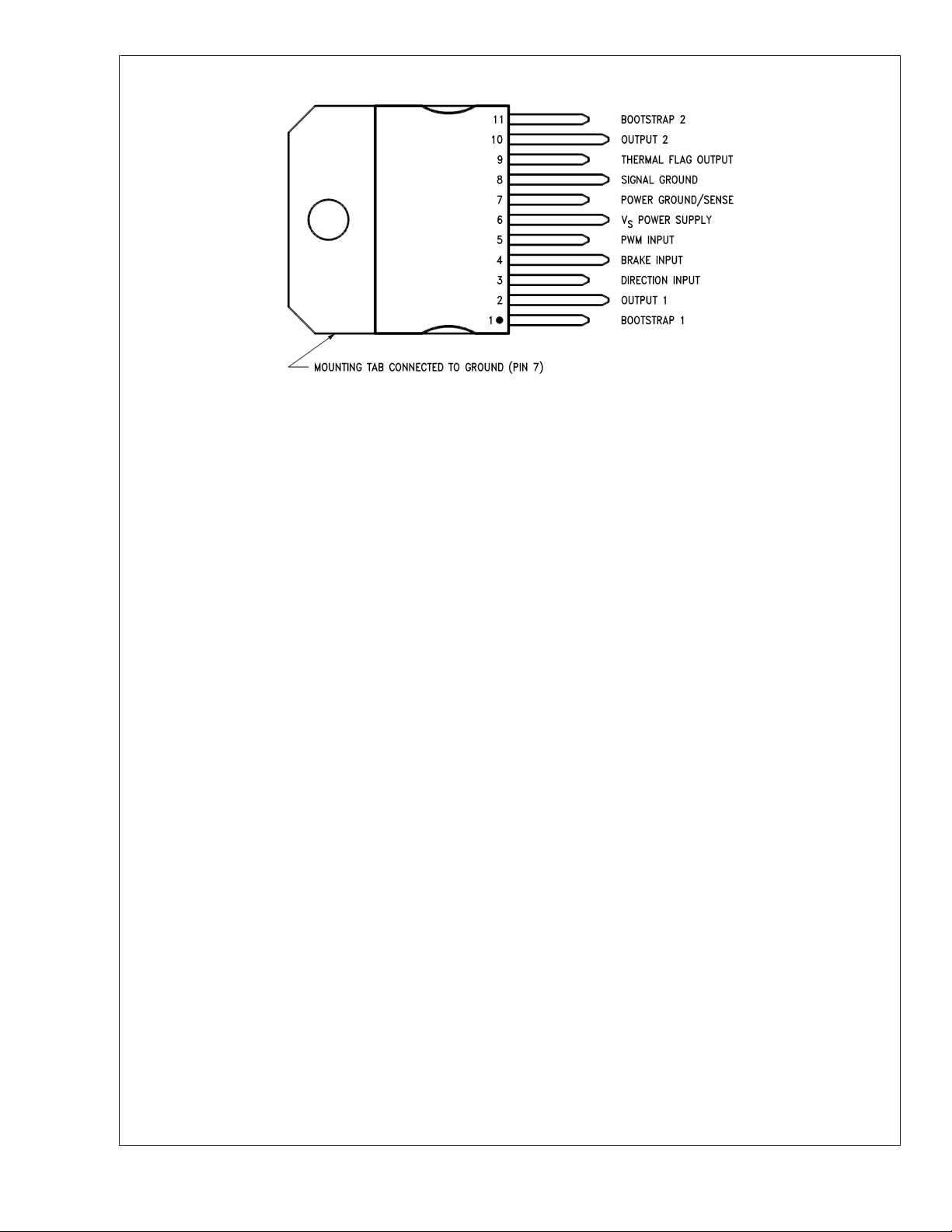
Connection Diagram and Ordering Information
LMD18201
Top View
Order Number LMD18201T
See NS Package Number TA11B
01079302
www.national.com 2
LMD18201
Absolute Maximum Ratings (Note 1)
If Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales Office/
Distributors for availability and specifications.
Total Supply Voltage (V
, Pin 6) 60V
S
Power Dissipation (T
Junction Temperature, T
= 25˚C, Free Air) 3W
A
J(max)
150˚C
ESD Susceptibility (Note 4) 1500V
Storage Temperature, T
STG
−40˚C to +150˚C
Lead Temperature (Soldering, 10 sec.) 300˚C
Voltage at Pins 3, 4, 5 and 9 12V
Voltage at Bootstrap Pins (Pins 1 and 11) V
OUT
+ 16V
Operating Ratings(Note 1)
Peak Output Current (200 ms) 6A
Continuous Output Current (Note 2) 3A
Power Dissipation (Note 3) 25W
Junction Temperature, T
V
Supply Voltage +12V to +55V
S
J
−40˚C to +125˚C
Sense Voltage (Pin 7 to Pin 8) +0.5V to −1.0V
Electrical Characteristics(Note 5)
The following specifications apply for VS= 42V, unless otherwise specified. Boldface limits apply over the entire operating
temperature range, −40˚C ≤ T
Symbol Parameter Conditions Typ Limit Units
R
R
V
V
I
IL
V
I
IL
DS(ON)
DS(ON)
CLAMP
IL
IH
Switch ON Resistance Output Current = 3A (Note 6) 0.33 0.4/0.6 Ω (max)
Switch ON Resistance Output Current = 6A (Note 6) 0.33 0.4/0.6 Ω (max)
Clamp Diode Forward Drop Clamp Current = 3A (Note 6) 1.2 1.5 V (max)
Logic Low Input Voltage Pins 3, 4, 5 −0.1 V (min)
Logic Low Input Current VIN= −0.1V, Pins = 3, 4, 5 −10 µA (max)
Logic High Input Voltage Pins 3, 4, 5 2 V (min)
Logic High Input Current VIN= 12V, Pins = 3, 4, 5 10 µA (max)
Undervoltage Lockout Outputs Turn OFF 9 V (min)
T
JW
V
F(ON)
I
F(OFF)
T
JSD
I
S
t
D(ON)
t
ON
t
D(OFF)
t
OFF
t
PW
t
CPR
Note 1: Absolute Maximum Ratings indicate limits beyond which damage to the device may occur. DC and AC electrical specifications do not apply when operating
the device beyond its rated operating conditions.
Note 2: See Application Information for details regarding current limiting.
Note 3: The maximum power dissipation must be derated at elevated temperatures and is a function of T
dissipation at any temperature is P
junction to case (θ
Note 4: Human-body model, 100 pF discharged through a 1.5 kΩ resistor. Except Bootstrap pins (pins 1 and 11) which are protected to 1000V of ESD.
Note 5: All limits are 100% production tested at 25˚C. Temperature extreme limits are guaranteed via correlation using accepted SQC (Statistical Quality Control)
methods. All limits are used to calculate AOQL, (Average Outgoing Quality Level).
Note 6: Output currents are pulsed (t
Warning Flag Temperature Pin 9 ≤ 0.8V, IL= 2 mA 145 ˚C
Flag Output Saturation Voltage TJ=TJW,IL= 2 mA 0.15 V
Flag Output Leakage VF= 12V 0.2 10 µA (max)
Shutdown Temperature Outputs Turn OFF 170 ˚C
Quiescent Supply Current All Logic Inputs Low 13 25 mA (max)
Output Turn-On Delay Time Sourcing Outputs, I
Output Turn-On Switching Time Bootstrap Capacitor = 10 nF
Output Turn-Off Delay Times Sourcing Outputs, I
Output Turn-Off Switching Times Bootstrap Capacitor = 10 nF
Minimum Input Pulse Width Pins 3, 4 and 5 1 µs
Charge Pump Rise Time No Bootstrap Capacitor 20 µs
) is 1.0˚C/W and from junction to ambient (θJA) is 30˚C/W. For guaranteed operation T
JC
≤ +125˚C, all other limits are for TA=TJ= 25˚C.
J
Sinking Outputs, I
Sourcing Outputs, I
Sinking Outputs, I
Sinking Outputs, I
Sourcing Outputs, I
Sinking Outputs, I
=(T
D(max)
J(max)−TA
<
2 ms, Duty Cycle<5%).
W
)/θJA, or the number given in the Absolute Ratings, whichever is lower. The typical thermal resistance from
0.8 V (max)
12 V (max)
11 V (max)
= 3A 300 ns
OUT
= 3A 300 ns
OUT
= 3A 100 ns
OUT
=3A 80 ns
OUT
= 3A 200 ns
OUT
= 3A 200 ns
OUT
=3A 75 ns
OUT
=3A 70 ns
OUT
, θJA, and TA. The maximum allowable power
J(max)
= 125˚C.
J(max)
www.national.com3

Typical Performance Characteristics
V
vs Flag Current R
SAT
LMD18201
01079312 01079313
vs Temperature
DS(ON)
R
DS(ON)
vs
Supply Voltage
Supply Current vs
Frequency (V
S
= 42V)
01079314
Supply Current vs
Supply Voltage
01079315
Supply Current vs
Temperature (VS= 42V)
01079316
www.national.com 4
01079317

Test Circuit
01079308
Pin 5, PWM Input: See Table 1. How this input (and DIREC-
TION input, Pin 3) is used is determined by the format of the
PWM Signal.
Pin 6, V
Pin 7, POWER GROUND/SENSE Connection: This pin is
the ground return for the power DMOS transistors of the
H-Bridge. The current through the H-Bridge can be sensed
by adding a small, 0.1Ω, sense resistor from this pin to the
power supply ground.
Pin 8, SIGNAL GROUND: This is the ground return for the
internal logic circuitry used to control the PWM switching of
the H-Bridge.
Pin 9, THERMAL FLAG Output: This pin provides the
thermal warning flag output signal. Pin 9 becomes active-low
at 145˚C (junction temperature). However the chip will not
shut itself down until 170˚C is reached at the junction.
Pin 10, OUTPUT 2: Half H-Bridge number 2 output.
Pin 11, BOOTSTRAP 2 Input: Bootstrap capacitor pin for
half H-Bridge number 2. The recommended capacitor
(10 nF) is connected between pins 10 and 11.
Power Supply
S
LMD18201
Switching Time Definitions
01079309
Pinout Description (See Connection Dia-
gram)
Pin 1, BOOTSTRAP 1 Input: Bootstrap capacitor pin for half
H-Bridge number 1. The recommended capacitor (10 nF) is
connected between pins 1 and 2.
Pin 2, OUTPUT 1: Half H-Bridge number 1 output.
Pin 3, DIRECTION Input: See Table 1. This input controls
the direction of current flow between OUTPUT 1 and OUTPUT 2 (pins 2 and 10) and, therefore, the direction of rotation
of a motor load.
Pin 4, BRAKE Input: See Table 1. This input is used to
brake a motor by effectively shorting its terminals. When
braking is desired, this input is taken to a logic high level and
it is also necessary to apply logic high to PWM input, pin 5.
The drivers that short the motor are determined by the logic
level at the DIRECTION input (Pin 3): with Pin 3 logic high,
both current sourcing output transistors are ON; with Pin 3
logic low, both current sinking output transistors are ON. All
output transistors can be turned OFF by applying a logic high
to Pin 4 and a logic low to PWM input Pin 5; in this case only
a small bias current (approximately −1.5 mA) exists at each
output pin.
TABLE 1. Logic Truth Table
PWM Dir Brake Active Output Drivers
H H L Source 1, Sink 2
H L L Sink 1, Source 2
L X L Source 1, Source 2
H H H Source 1, Source 2
H L H Sink 1, Sink 2
L X H NONE
Application Information
TYPES OF PWM SIGNALS
The LMD18201 readily interfaces with different forms of
PWM signals. Use of the part with two of the more popular
forms of PWM is described in the following paragraphs.
Simple, locked anti-phase PWM consists of a single, variable duty-cycle signal in which is encoded both direction and
amplitude information (see Figure 2). A 50% duty-cycle
PWM signal represents zero drive, since the net value of
voltage (integrated over one period) delivered to the load is
zero. For the LMD18201, the PWM signal drives the direction input (pin 3) and the PWM input (pin 5) is tied to logic
high.
01079304
FIGURE 2. Locked Anti-Phase PWM Control
www.national.com5

Application Information (Continued)
Sign/magnitude PWM consists of separate direction (sign)
and amplitude (magnitude) signals (see Figure 3). The (ab-
LMD18201
solute) magnitude signal is duty-cycle modulated, and the
FIGURE 3. Sign/Magnitude PWM Control
absence of a pulse signal (a continuous logic low level)
represents zero drive. Current delivered to the load is proportional to pulse width. For the LMD18201, the DIRECTION
input (pin 3) is driven by the sign signal and the PWM input
(pin 5) is driven by the magnitude signal.
01079305
FIGURE 4. Transitions in Brake, Direction, or PWM Must be Separated by At Least 1 µsec
SIGNAL TRANSITION REQUIREMENTS
To ensure proper internal logic performance, it is good practice to avoid aligning the falling and rising edges of input
signals. A delay of at least 1 µsec should be incorporated
between transitions of the Direction, Brake, and/or PWM
input signals. A conservative approach is be sure there is at
least 500ns delay between the end of the first transition and
the beginning of the second transition. See Figure 4.
USING THE THERMAL WARNING FLAG
The THERMAL FLAG output (pin 9) is an open collector
transistor. This permits a wired OR connection of thermal
warning flag outputs from multiple LMD18201’s, and allows
the user to set the logic high level of the output signal swing
to match system requirements. This output typically drives
www.national.com 6
01079324
the interrupt input of a system controller. The interrupt service routine would then be designed to take appropriate
steps, such as reducing load currents or initiating an orderly
system shutdown. The maximum voltage compliance on the
flag pin is 12V.
SUPPLY BYPASSING
During switching transitions the levels of fast current
changes experienced may cause troublesome voltage transients across system stray inductances.
It is normally necessary to bypass the supply rail with a high
quality capacitor(s) connected as close as possible to the V
Power Supply (Pin 6) and POWER GROUND (Pin 7). A 1 µF
high-frequency ceramic capacitor is recommended. Care
should be taken to limit the transients on the supply pin
S

Application Information (Continued)
below the Absolute Maximum Rating of the device. When
operating the chip at supply voltages above 40V a voltage
suppressor (transorb) such as P6KE62A is recommended
from supply to ground. Typically the ceramic capacitor can
be eliminated in the presence of the voltage suppressor.
Note that when driving high load currents a greater amount
of supply bypass capacitance (in general at least 100 µF per
Amp of load current) is required to absorb the recirculating
currents of the inductive loads.
CURRENT LIMITING
Current limiting protection circuitry has been incorporated
into the design of the LMD18201. With any power device it is
important to consider the effects of the substantial surge
currents through the device that may occur as a result of
shorted loads. The protection circuitry monitors the current
through the upper transistors and shuts off the power device
as quickly as possible in the event of an overload condition
(the threshold is set to approximately 10A). In a typical motor
driving application the most common overload faults are
caused by shorted motor windings and locked rotors. Under
these conditions the inductance of the motor (as well as any
series inductance in the V
the magnitude of a current surge to a safe level for the
LMD18201. Once the device is shut down, the control circuitry will periodically try to turn the power device back on.
This feature allows the immediate return to normal operation
once the fault condition has been removed. While the fault
remains however, the device will cycle in and out of thermal
shutdown. This can create voltage transients on the V
supply line and therefore proper supply bypassing techniques are required.
The most severe condition for any power device is a direct,
hard-wired (“screwdriver”) long term short from an output to
ground. This condition can generate a surge of current
through the power device on the order of 15 Amps and
require the die and package to dissipate up to 500W of
power for the short time required for the protection circuitry
to shut off the power device. This energy can be destructive,
particularly at higher operating voltages (
precautions are in order. Proper heat sink design is essential
and it is normally necessary to heat sink the V
(pin 6) with 1 square inch of copper on the PC board.
supply line) serves to reduce
CC
>
30V) so some
supply pin
CC
CC
LMD18201
01079306
FIGURE 5. Internal Charge Pump Circuitry
For higher switching frequencies, the LMD18201 provides
for the use of external bootstrap capacitors. The bootstrap
principle is in essence a second charge pump whereby a
large value capacitor is used which has enough energy to
quickly charge the parasitic gate input capacitance of the
power device resulting in much faster rise times. The switching action is accomplished by the power switches themselves (Figure 6). External 10 nF capacitors, connected from
the outputs to the bootstrap pins of each high-side switch
provide typically less than 100 ns rise times allowing switching frequencies up to 500 kHz.
INTERNAL CHARGE PUMP AND USE OF BOOTSTRAP CAPACITORS
To turn on the high-side (sourcing) DMOS power devices,
the gate of each device must be driven approximately 8V
more positive than the supply voltage. To achieve this an
internal charge pump is used to provide the gate drive voltage. As shown in (Figure 5), an internal capacitor is alternately switched to ground and charged to about 14V, then
switched to V
than V
S
thereby providing a gate drive voltage greater
S
. This switching action is controlled by a continuously
running internal 300 kHz oscillator. The rise time of this drive
voltage is typically 20 µs which is suitable for operating
frequencies up to 1 kHz.
01079307
FIGURE 6. Bootstrap Circuitry
INTERNAL PROTECTION DIODES
A major consideration when switching current through inductive loads is protection of the switching power devices from
the large voltage transients that occur. Each of the four
switches in the LMD18201 have a built-in protection diode to
clamp transient voltages exceeding the positive supply or
ground to a safe diode voltage drop across the switch.
The reverse recovery characteristics of these diodes, once
the transient has subsided, is important. These diodes must
come out of conduction quickly and the power switches must
be able to conduct the additional reverse recovery current of
the diodes. The reverse recovery time of the diodes protecting the sourcing power devices is typically only 70 ns with a
www.national.com7
Application Information (Continued)
reverse recovery current of 1A when tested with a full 3A of
forward current through the diode. For the sinking devices
LMD18201
the recovery time is typically 100 ns with 4A of reverse
current under the same conditions.
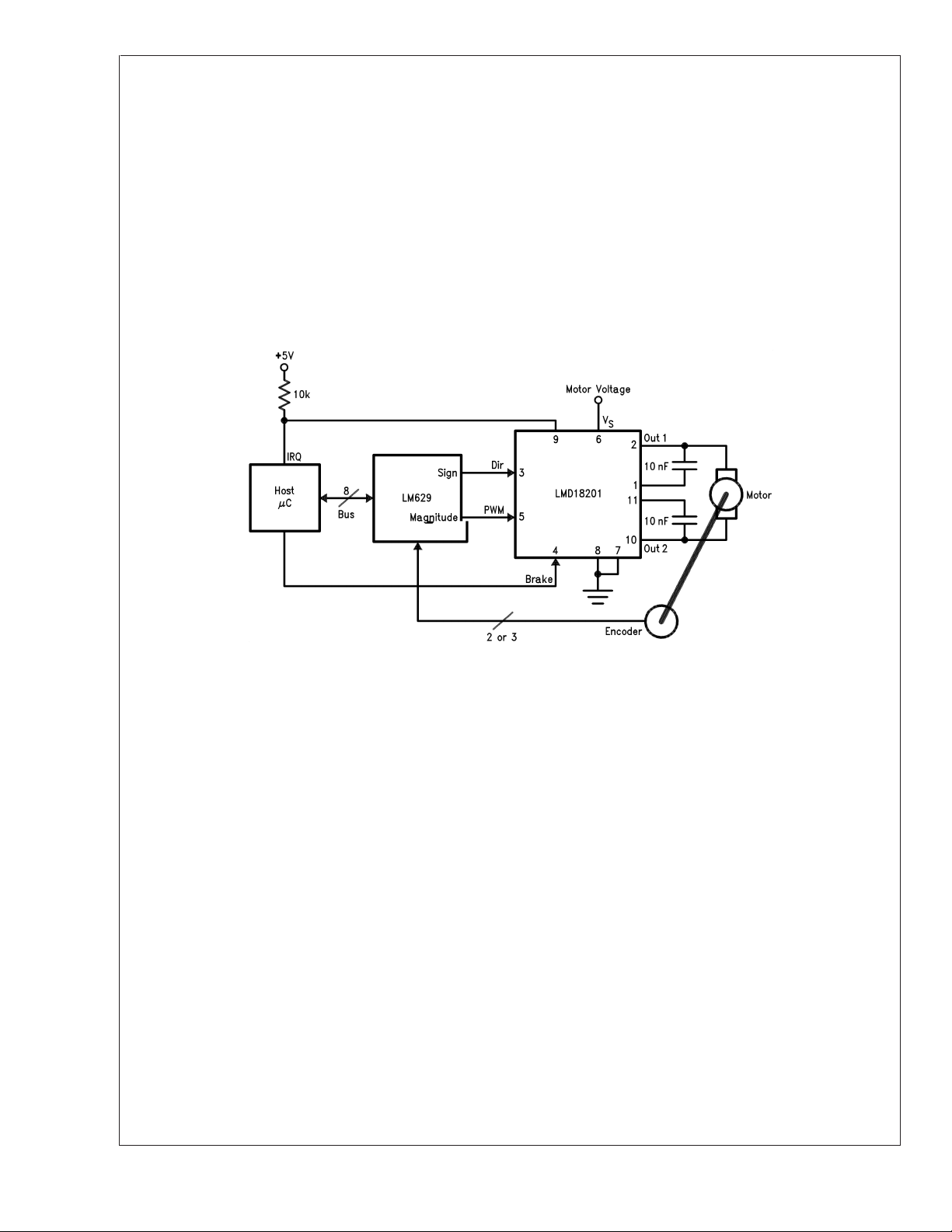
Typical Applications
BASIC MOTOR DRIVER
The LMD18201 can directly interface to any Sign/Magnitude
PWM controller. The LM629 is a motion control processor
that outputs a Sign/Magnitude PWM signal to coordinate
either positional or velocity control of DC motors. The
LMD18201 provides fully protected motor driver stage.
FIGURE 7. Basic Motor Driver
CURRENT SENSING
In many motor control applications it is desirable to sense
and control the current through the motor. For these types of
applications a companion product, the LMD18200, is also
available. The LMD18200 is identical to the LMD18201 but
has current sensing transistors that output a current directly
proportional to the current conducted by the two upper
DMOS power devices to a separate current sense pin. This
technique does not require a low valued, power sense resistor and does not subtract from the available voltage drive to
the motor.
To sense the bridge current through the LMD18201 requires
the addition of a small sense resistor between the power
ground/sense pin (Pin 7) and the actual circuit ground (see
Figure 8). This resistor should have a value of 0.1Ω or less to
01079310
stay within the allowable voltage compliance of the sense
pin, particularly at higher operating current levels. The voltage between power ground/sense (Pin 7) and the signal
ground (Pin 8) must stay within the range of −1V to +0.5V.
Internally there is approximately 25Ω between pins 7 and 8
and this resistance will slightly reduce the value of the external sense resistor. Approximately 70% of the quiescent
supply current (10 mA) flows out of pin 7. This will cause a
slight offset to the voltage across the sense resistor when
the bridge is not conducting. During reverse recovery of the
internal protection diodes the voltage compliance between
pins 7 and 8 may be exceeded. The duration of these spikes
however are only approximately 100 ns and do not have
enough time or energy to disrupt the operation of the
LMD18201.
www.national.com 8

Typical Applications (Continued)
LMD18201
01079311
FIGURE 8. Current Sensing
www.national.com9
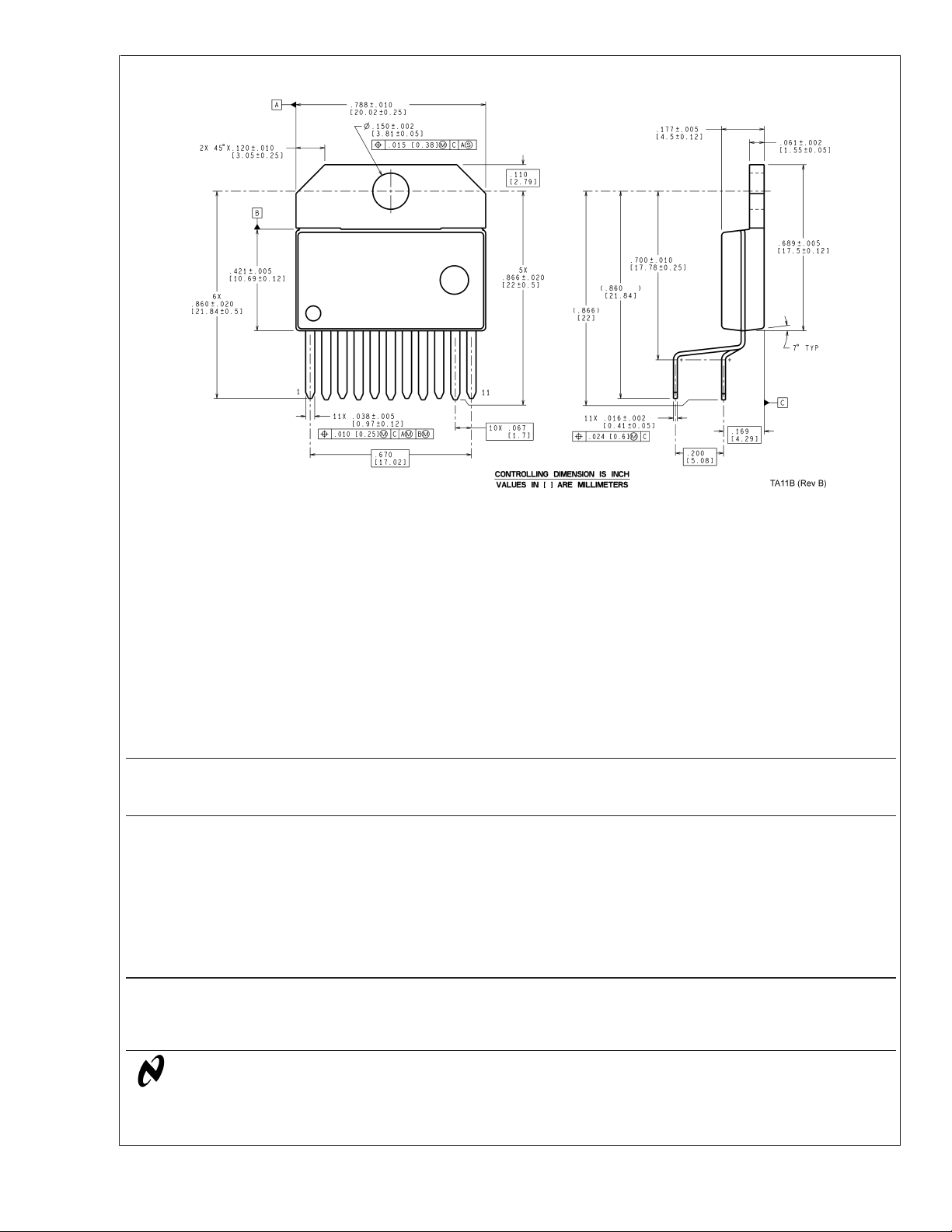
Physical Dimensions inches (millimeters) unless otherwise noted
LMD18201 3A, 55V H-Bridge
11-Lead TO-220 Power Package (T)
Order Number LMD18201T
NS Package Number TA11B
National does not assume any responsibility for use of any circuitry described, no circuit patent licenses are implied and National reserves
the right at any time without notice to change said circuitry and specifications.
For the most current product information visit us at www.national.com.
LIFE SUPPORT POLICY
NATIONAL’S PRODUCTS ARE NOT AUTHORIZED FOR USE AS CRITICAL COMPONENTS IN LIFE SUPPORT DEVICES OR SYSTEMS
WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT AND GENERAL COUNSEL OF NATIONAL SEMICONDUCTOR
CORPORATION. As used herein:
1. Life support devices or systems are devices or systems
which, (a) are intended for surgical implant into the body, or
(b) support or sustain life, and whose failure to perform when
properly used in accordance with instructions for use
2. A critical component is any component of a life support
device or system whose failure to perform can be reasonably
expected to cause the failure of the life support device or
system, or to affect its safety or effectiveness.
provided in the labeling, can be reasonably expected to result
in a significant injury to the user.
BANNED SUBSTANCE COMPLIANCE
National Semiconductor certifies that the products and packing materials meet the provisions of the Customer Products Stewardship
Specification (CSP-9-111C2) and the Banned Substances and Materials of Interest Specification (CSP-9-111S2) and contain no ‘‘Banned
Substances’’ as defined in CSP-9-111S2.
National Semiconductor
Americas Customer
Support Center
Email: new.feedback@nsc.com
Tel: 1-800-272-9959
www.national.com
National Semiconductor
Europe Customer Support Center
Fax: +49 (0) 180-530 85 86
Email: europe.support@nsc.com
Deutsch Tel: +49 (0) 69 9508 6208
English Tel: +44 (0) 870 24 0 2171
Français Tel: +33 (0) 1 41 91 8790
National Semiconductor
Asia Pacific Customer
Support Center
Email: ap.support@nsc.com
National Semiconductor
Japan Customer Support Center
Fax: 81-3-5639-7507
Email: jpn.feedback@nsc.com
Tel: 81-3-5639-7560
 Loading...
Loading...