

Page 1

CAN
Getting Started with Your PXI-8461 or PXI-8460 and the NI-CAN™ Software for Windows NT
PXI-8461 or PXI-8460 and NI-CAN for Windows NT
September 1999 Edition
Part Number 322006B-01
Page 2

Worldwide Technical Support and Product Information
www.natinst.com
National Instruments Corporate Headquarters
11500 North Mopac Expressway Austin, Texas 78759-3504 USA Tel: 512 794 0100
Worldwide Offices
Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20, Brazil 011 284 5011,
Canada (Calgary) 403 274 9391, Canada (Ontario) 905 785 0085, Canada (Québec) 514 694 8521,
China 0755 3904939, Denmark 45 76 26 00, Finland 09 725 725 11, France 01 48 14 24 24,
Germany 089 741 31 30, Greece 30 1 42 96 427, Hong Kong 2645 3186, India 91805275406,
Israel 03 6120092, Italy 02 413091, Japan 03 5472 2970, Korea 02 596 7456, Mexico (D.F.) 5 280 7625,
Mexico (Monterrey) 8 357 7695, Netherlands 0348 433466, Norway 32 27 73 00, Singapore 2265886,
Spain (Barcelona) 93 582 0251, Spain (Madrid) 91 640 0085, Sweden 08 587 895 00,
Switzerland 056 200 51 51, Taiwan 02 2377 1200, United Kingdom 01635 523545
For further support information, see the Technical Support Resources appendix. To comment on the
documentation, send e-mail to techpubs@natinst.com.
© Copyright 1998, 1999 National Instruments Corporation. All rights reserved.
Page 3

Important Information
Warranty
The PXI hardware is warranted against defects in materials and workmanship for a period of one year from the date of
shipment, as evidenced by receipts or other documentation. National Instruments will, at its option, repair or replace equipmen t
that proves to be defective during the warranty period. Th is warrant y in cludes parts and labor.
The media on which you receive National Instruments software are warranted not to fail to execute programming i nstructions,
due to defects in materials and workmanship, for a period of 90 days from date of shipment, as evidenced by receipt s or other
documentation. National Instruments will, at its op ti on, repai r or repl ace soft ware me dia th at do not ex ecu te prog ram mi ng
instructions if National Instruments receives notice of such defects during the warrant y period. Nati onal Inst rume nt s does not
warrant that the operation of the software shall be uninterrup ted or error free.
A Return Material Authorization (RMA) number must be obtained from the factory and clearly marked on the outside of
the package before any equipment will be accepted for warranty work. National Instruments will pay the shipping costs of
returning to the owner parts which are covered by warrant y.
National Instruments believes that the information in this document is accurate. The document has been carefully reviewed
for technical accuracy. In the event that technical or typographical errors exist, National Instruments reserves the right to
make changes to subsequent editions of this document without prior notice to holders of this edition. The reader should consult
National Instruments if errors are suspected. In no even t shall Nati on al Inst rum ents be l iable fo r any dama ges aris in g o ut of
or related to this document or the information contained in it.
XCEPT AS SPECIFIED HEREIN
E
WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE
OR NEGLIGENCE ON THE PART OF NATIONAL INSTRUMENTS SHALL BE LIMITED TO THE AMOUNT THERETOFORE PAID BY THE CUSTOMER
ATIONAL INSTRUMENTS WILL NOT BE LIABLE FOR DAMAGES RESULTING FROM LOSS OF DATA, PROFITS, USE OF PRODUCTS, OR INCIDENTAL
N
OR CONSEQUENTIAL DAMAGES, EVEN IF ADVISED OF THE POSSIBILITY THEREOF
will apply regardless of the form of action, whether in contract or tort, including negligence. Any action against National
Instruments must be brought within one year after the cause of action accrues. National Instruments shall not be liable for
any delay in performance due to causes beyond its reasonable control. The warranty provided herein does not cover damages,
defects, malfunctions, or service failures caused by owner’s failure to follow the National Instruments installation, operation,
or maintenance instructions; owner’s modification of the product; owner’s abuse, misuse, or negligent acts; and power failure
or surges, fire, flood, accident, actions of third part ies, o r other eve nts o ut side reasonab le co ntrol .
ATIONAL INSTRUMENTS MAKES NO WARRANTIES, EXPRESS OR IMPLIED, AND SPECIFICALLY DISCLAIMS ANY
, N
Copyright
Under the copyright laws, this publication may not be reproduced or transmitted in any form, electronic or mechanical,
including photocopying, recording, sto rin g in an i nform atio n ret rieval s ystem , o r t ranslati ng , i n w hole o r in part, w it ho ut
the prior written consent of National Instruments Corporation.
USTOMER’S RIGHT TO RECOVER DAMAGES CAUSED BY FAULT
. C
. This limitation of the liability of National Instruments
.
Trademarks
BridgeVIEW™, CVI™, LabVIEW™, natinst.com™, National Instruments™, and NI-CAN™ are trademarks of
National Instruments Corporation.
Product and company names mentioned herein are trademarks or trade names of their respective companies.
WARNING REGARDING USE OF NATIONAL INSTRUMENTS PRODUCTS
(1) NATIONAL INSTRUMENTS PRODUCTS ARE NOT DESIGNED WITH COMPONENTS AND TESTING
FOR A LEVEL OF RELIABILITY SUITABLE FOR USE IN OR IN CONNECTION WITH SURGICAL IMPLANT S
OR AS CRITICAL COMPONENTS IN ANY LIFE SUPPORT SYSTEMS WHOSE FAILURE TO PERFORM CAN
REASONABLY BE EXPECTED TO CAUSE SIGNIFICANT INJURY TO A HUMAN.
(2) IN ANY APPLICATION, INCLUDING THE ABOVE, RELIABILITY OF OPERATION O F THE SOFTWARE
PRODUCTS CAN BE IMPAIRED BY ADVERSE FACTORS, INCLUDING BUT NOT LIMITED TO FLUCTUATIONS
IN ELECTRICAL POWER SUPPLY, COMPUTER HARDWARE MALFUNCTIONS, COMPUTER OPERATING
SYSTEM SOFTWARE FITNESS, FITNESS OF COMPILERS AND DEVELOPMENT SOFTWARE USED TO DEVELOP
AN APPLICATION, INSTALLATION ERRORS, SOFTWARE AND HARDWARE COMPATIBILITY PROBLEMS,
MALFUNCTIONS OR FAILURES OF ELECTRONIC MONITORING OR CONTROL DEVICES, TRANSIENT
FAILURES OF ELECTRONIC SYSTEMS (HARDWARE AND/OR SOFTWARE), UNANTICIPATED USES OR
MISUSES, OR ERRORS ON THE PART OF THE USER OR APPLICATIONS DESIGNER (ADVERSE FACTORS SUCH
AS THESE ARE HEREAFTER COLLECTIVELY TERMED “SYSTEM FAILURES”). AN Y A PPLICATION WHE RE A
SYSTEM FAILURE WOULD CREATE A RISK OF HARM TO PROPERTY OR PERSONS (INCLUDING THE RISK OF
BODILY INJURY AND DEATH) SHOULD NOT BE RELIANT SOLELY UPON ONE FORM OF ELECTRONIC SYSTEM
DUE TO THE RISK OF SYSTEM FAILURE. TO AVOID DAMAGE, INJURY, OR DEATH , TH E U SER OR
APPLICATION DESIGNER MUST TAKE REASONABLY PRUDENT STEPS TO PROTECT AGAINST SYSTEM
FAILURES, INCLUDING BUT NOT LIMITED TO BACK-UP OR SHUT DOWN MECHANISMS. BECAUSE EACH
END-USER SYSTEM IS CUSTOMIZED AND DIFFERS FROM NATIONAL INSTRUMENTS' TESTING PLATFORMS
AND BECAUSE A USER OR APPLICATION DESIGNER MAY USE NATIONAL INSTRUMENTS PRODUCTS IN
COMBINATION WITH OTHER PRODUCTS IN A MANNER NOT EVALUATED OR CONTEMPLATED BY
NATIONAL INSTRUMENTS, THE USER OR APPLICATION DESIGNER IS ULTIMATELY RESPONSIBL E FOR
VERIFYING AND VALIDATING THE SUITABILITY OF NATIONAL INSTRUMENT S PRODUCTS WHENEVE R
NATIONAL INSTRUMENTS PRODUCTS ARE INCORPORATED IN A SYSTEM OR A PPLICATION, INCL UDING ,
WITHOUT LIMITATION, THE APPROPRIATE DESIGN, PROCESS AND SAFETY LEVEL OF SUCH SYSTEM OR
APPLICATION.
Page 4

Compliance
FCC/DOC Radio Frequency Interference
Class A Compliance
This equipment generates and uses radio frequency energy and, if not installed and used in strict accordance
with the instructions in this manual, may cause interference to radio and television reception. Classification
requirements are the same for the Federal Communications Commission (FCC) and the Canadian
Department of Communications (DOC). This equipment has been tested and found to comply with the
following two regulatory agencies:
Federal Communications Commission
This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant
to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful
interference when the equipment is operated in a commercial environment. This equipment generates,
uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instruction
manual, may cause harmful interference to radio communications. Operation of this equipment in a
residential area is likely to cause harmful interference in which case the user will be required to correct the
interference at his own expense.
Notices to User: Changes or modifications not expressly approved by National Instruments could void
If necessary, consult National Instruments or an experienced radio/television technician for additional
suggestions. The following booklet prepared by the FCC may also be helpful: Interference to Home
Electronic Entertainment Equipment Handbook. This booklet is available from the U.S. Government
Printing Office, Washington, DC 20402.
the user’s authority to operate the equipment under the FCC Rules.
This device complies with the FCC rules only if used with shielded interface cables
of suitable quality and construction. National Instruments used such cables to test
this device and provides them for sale to the user. The use of inferior or nonshielded
interface cables could void the user’s authority to operate the equipment under the
FCC rules.
Canadian Department of Communications
This Class A digital apparatus meets all requirements of the Canadian Interference-Causing Equipment
Regulations.
Cet appareil numérique de la classe A respecte toutes les exigences du Règlement sur le matériel brouilleur
du Canada.
Page 5

Contents
About This Manual
How To Use the Manual Set..........................................................................................ix
Conventions ...................................................................................................................x
Related Documentation........................................... .......................................................xi
Chapter 1
Introduction
What You Need to Get Started...................................................................................... 1-1
Hardware Overview.......................................................................................................1-1
NI-CAN Software Overview ...................................................... ...................................1-2
Optional Programming Tools ........................... .............................................................1-3
Chapter 2
Installation and Configuration
Install the NI-CAN Software.........................................................................................2-1
Installation for Windows NT 3.51...................................................................2-1
Installing for Windows NT 4.0........................................................................2-1
Install the Hardware.......................................................................................................2-3
Check the Configuration of Your PXI-8461 or PXI-8460..............................2-3
Install Your PXI-8461 or PXI-8460................................................................2-3
Connect the Cables..........................................................................................2-4
Configure the NI-CAN Software...................................................................................2-5
Chapter 3
Verify the Installation
Chapter 4
Begin to Use the NI-CAN Software
Using the NI-CAN Software..........................................................................................4-1
General Programming Considerations...........................................................................4-2
Appendix A
Uninstalling the Hardware and Software
Uninstalling the Hardware from Windows NT..............................................................A-1
Uninstalling the NI-CAN Software from Windows NT................................................A-1
© National Instruments Corporation v PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 6

Contents
Appendix B
Cabling Requirements for PXI-8461 High-Speed CAN
Connector Pinouts ............................... ..........................................................................B-1
Power Supply Information for the High-Speed CAN Ports..........................................B-2
Bus Power Supply Requirements..................................................................................B-4
Cable Specifications......................................................................................................B-5
Cable Lengths................................................................................................................B-5
Number of Devices........................................................................................................B-6
Cable Termination.........................................................................................................B-6
Cabling Example...........................................................................................................B-7
Appendix C
Cabling Requirements for PXI-8460 Low-Speed CAN
Connector Pinouts ............................... ..........................................................................C-1
Power Supply Information for the Low-Speed CAN Ports...........................................C-2
Bus Power Supply Requirements..................................................................................C-3
Cable Specifications......................................................................................................C-4
Number of Devices........................................................................................................C-4
Low-Speed Termination................................................................................................C-5
Determining the Necessary Termination Resistance for Your Board.............C-5
Replacing the Termination Resistors..............................................................C-7
Cabling Example...........................................................................................................C-8
Appendix D
Troubleshooting and Common Questions
Missing Board in the NI-CAN Configuration Utility....................................................D-1
Diagnostic Utility Failures ............................................................................................ D-1
Resource Errors................................. ..............................................................D-1
NI-CAN Software Problem Encountered ....................................................... D-2
Missing Board in Diagnostic Utility...............................................................D-2
Hardware Problem Encountered.....................................................................D-2
Common Questions.......................................................................................................D-2
Appendix E
Specifications
Appendix F
Technical Support Resources
PXI-8461 or PXI-8460 and NI-CAN for Windows NT vi www.natinst.com
Page 7

Glossary
Figures
Figure 2-1. Add/Remove Programs Properties Dialog Box.....................................2-2
Figure 2-2. Installing the PXI Hardware..................................................................2-4
Figure 2-3. PXI-8461 That Is Working Properly.....................................................2-5
Figure 2-4. NI-CAN Hardware Settings Dialog Box...............................................2-6
Figure 3-1. NI-CAN Diagnostic Utility after Testing..............................................3-1
Figure A-1. Add/Remove Programs Properties Dialog Box.....................................A-2
Figure B-1. Pinout for 9-Pin D-Sub Connector ........................................................B-1
Figure B-2. Pinout for 5-Pin Combicon-Style Pluggable Screw Terminal ..............B-2
Figure B-3. PXI-8461 Part Locator Diagram ...........................................................B-3
Figure B-4. Power Source Jumpers ..........................................................................B-4
Figure B-5. Termination Resistor Placement ...........................................................B-6
Figure B-6. Cabling Example ...................................................................................B-7
Figure C-1. Pinout for 9-Pin D-Sub Connector ........................................................C-1
Figure C-2. PXI-8460 Parts Locator Diagram..........................................................C-2
Figure C-3. Power Source Jumpers ..........................................................................C-3
Figure C-4. Termination Resistor Placement for Low-Speed CAN.........................C-5
Figure C-5. Location of Termin ation Resistors on a PXI-8460 ...............................C-7
Figure C-6. Preparing Lead Wires of Replacement Resistors..................................C-7
Figure C-7. Cabling Example ...................................................................................C-8
Contents
Tables
Table B-1. Power Requirements for the CAN Physical Layer for
Bus-Powered Versions ..........................................................................B-4
Table B-2. ISO 11898 Specifications for Characteristics of a CAN_H and
CAN_L Pair of Wires............................................................................B-5
Table B-3. DeviceNet Cable Length Specifications................................................B-5
Table C-1. Power Requirements for the Low-Speed CAN Physical Layer for
Bus-Powered Versions ..........................................................................C-3
Table C-2. ISO 11519-2 Specifications for Characteristics of a CAN_H and
CAN_L Pair of Wires............................................................................C-4
© National Instruments Corporation vii PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 8

About This Manual
This manual contains instructions to help you install and configure your
PXI-8461 (one port and two port) or PXI-8460 (one port or two port) and
the NI-CAN software for Windows NT. This manual uses PXI-8461 or
PXI-8460 to refer to both the one port and two port versions of the boards.
This manual assumes that you are already familiar with Windows NT.
How To Use the Manual Set
Getting Started
Manual
Novice
Users
NI-CAN
User Manual
Application
Development
and Examples
Installation and
Configuration
Experienced
Users
NI-CAN Programmer
Reference Manual
Function
and Object
Descriptions
Use this getting started manual to install and configure your PXI-8461 or
PXI-8460 and the NI-CAN software for Windows NT.
Use the NI-CAN User Manual to learn the basics of CAN and how to
develop an application program. The user manual also contains debugging
information and detailed examples.
© National Instruments Corporation ix PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 9

About This Manual
Use the NI-CAN Programmer Reference Manual for specific information
about each NI-CAN function and object, including format, parameters, and
possible errors.
Conventions
The following conventions appear in this manual:
» The » symbol leads you through nested menu items and dialog box options
to a final action. The sequence File»Page Setup»Options directs you to
pull down the File menu, select the Page Setup item, and select Options
from the last dialog box.
This icon denotes a note, which alerts you to important information.
This icon denotes a caution, which advises you of precautions to take to
avoid injury, data loss, or a system crash.
bold Bold text denotes items that you must select or click on in the software,
such as menu items and dialog box options. Bold text also denotes
parameter names.
italic Italic text denotes variables, emphasis, a cross reference, or an introduction
to a key concept. This font also denotes text that is a placeholder for a w ord
or value that you must supply.
monospace Text in this font denotes text or characters that you should enter from the
keyboard, sections of code, programming examples, and syntax examples.
This font is also used for the proper names of disk drives, paths, directories,
programs, subprograms, subroutines, device names, functions, operations,
variables, filenames and extensions, and code excerpts.
monospace italic
PXI-8461 or PXI-8460 and NI-CAN for Windows NT x www.natinst.com
Italic text in this font denotes text that is a placeholder for a word or value
that you must supply.
Page 10

Related Documentation
The following documents contain information that you may find helpful as
you read this manual:
• ANSI/ISO Standard 11898-1993, Road Vehicles—Interchange of
Digital Information—Controller Area Network (CAN) for High-Speed
Communication
• ANSI/ISO Standard 11519-2-1994, Road Vehicles—Low-Speed
Serial Data Communication—Part 2: Low-Speed Controller Area
Network (CAN)
• CAN Specification Version 2.0, 1991, Robert Bosch Gmbh.,
Postfach 500, D-7000 Stuttgart 1
• CiA Draft Standard 102, Version 2.0, CAN Physical Layer for
Industrial Applications
• CompactPCI Specification, Revision 2.0, PCI Industrial Computers
Manufacturers Group
• DeviceNet Specification, Version 2.0, Open DeviceNet Vendor
Association
• PXI Specification, Revision 1.0, National Instruments Corporation
About This Manual
© National Instruments Corporation xi PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 11

Introduction
This chapter lists what you need to get started, provides an overview of the
PXI hardware and the NI-CAN software for Windows NT, and describes
optional equipment you can order.
What You Need to Get Started
Make sure you have all of the following items before you attempt to install
the hardware and software:
❑ Windows NT 3.51 or later installed on your computer
– PXI-8461 one port
– PXI-8461 two port
– PXI-8460 one port
– PXI-8460 two port
❑ 3.5 in., high-density (1.44 MB) disks, which are included in your kit:
– NI-CAN Software for Windows 95/98/NT
Version 1.3
(Disk x of 3)
1
❑ CAN interface cables that meet the requirements in Appendix B,
Cabling Requirements for PXI-8461 High-Speed CAN or Appendix C,
Cabling Requirements for PXI-8460 Low-Speed CAN.
Hardware Overview
The PXI-8461 and PXI-8460 (one port and two port) are software
configurable and compliant with the PXI Specification and CompactPCI
Specification. With a PXI-8461 or PXI-8460 board, you can make your
PXI or CompactPCI chassis communicate with and control CAN devices.
The PXI-8461 physical layer fully conforms to the ISO 11898
physical layer specification for CAN and is optically isolated to 500 V.
The PXI-8460 physical layer conforms to the ISO 11519-2 physical layer
© National Instruments Corporation 1-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 12
Chapter 1 Introduction
specification for CAN and is also optically isolated to 500 V. CAN
interfacing is accomplished using the Intel 82527 CAN controller chip.
The PXI-8461 supports a wide variety of transfer rates up to 1 Mb/s.
The PXI-8460 supports rates up to 125 kb/s. The CAN physical layer on the
PXI-8461 and PXI-8460 can be powered either internally (from the board)
or externally (from the bus cable power). The power source for the CAN
physical layer for each port is configured with a jumper.
PXI-8461 boards are available with two physical connector types:
• DB-9 D-Sub
• Combicon-style pluggable screw terminals
PXI-8460 boards are available with DB-9 D-Sub connectors.
The PXI-8461 and PXI-8460 use the Intel 386EX embedded processor
to implement time-critical features provided by the NI-CAN software.
The PXI-8461 and PXI-8460 communicate with the NI-CAN driver
through on-board shared memory and an interrupt.
NI-CAN Software Overview
The NI-CAN software includes a native, 32-bit multitasking Windows NT
kernel driver. The NI-CAN software is fully integrated into the
Windows NT operating system. You can configure it through the
Windo ws NT Control Panel and uninstall it through the Add/Remove
Programs applet of the Control Panel.
The NI-CAN software for Windows NT supports the concurrent use of
multiple CAN boards. For example, you can use both a PXI-8461 and
PCMCIA-CAN in the same system at the same time.
The NI-CAN software, along with the PXI hardware, transforms your
computer into a CAN interface with complete communications and bus
management capability. The NI-CAN software includes the following
components:
• Firmware (runs on embedded Intel 386EX)
• Device driver
• Diagnostic test utility
• Configuration utility
PXI-8461 or PXI-8460 and NI-CAN for Windows NT 1-2 www.natinst.com
Page 13
• Language interface libraries for Microsoft Visual C/C++ 2.0 or later,
LabWindows/CVI 4.0 or later, and LabVIEW 4.0 or later
• Example programs that use NI-CAN functions
Optional Programming Tools
Your kit includes the NI-CAN software for Windows NT. In addition,
you can order the LabWindows/CVI, LabVIEW, or BridgeVIEW software
from National Instruments.
LabWindows/CVI is an interactive ANSI C development environment for
building test and measurement and instrument control systems. It includes
interactive code-generation tools and a graphical editor for b uilding custom
user interfaces. It also includes built-in libraries for IEEE 488.2, VXI,
RS-232 control, and plug-in data acquisition. When you order
LabWindows/CVI, you also get hundreds of complete instrument drivers,
which are modular, source-code programs that handle the communication
with your instrument so that you do not have to learn the programming
details.
LabVIEW is a complete programming environment that departs from the
sequential nature of traditional programming languages and features a
graphical programming environment. It includes all the tools needed for
instrument control, data acquisition, analysis, and presentation. LabVIEW
also includes an extensive instrument driver library.
Chapter 1 Introduction
BridgeVIEW is a radical departure from traditional automation software
that provides a flexible program development system for a variety of
DeviceNet applications including general manufacturing, test, and control.
Leveraging National Instruments patented graphical programming
language G (otherwise known as LabVIEW), BridgeVIEW gives you the
ability to integrate functionality in a way that is not possible with traditional
automation software. In addition to the programming advantages of G,
BridgeVIEW also provides a number of powerful features for the
development of your industrial automation application: graphical HMI
(Human Machine Interface); ease of use; fill-in-the-blank configuration
utilities; HMI G Wizard for simplified HMI development; historical data
collection and trending; alarm and event reporting and logging; security;
and connectivity to PLCs and industrial device networks like DeviceNet.
For more information about LabWindows/CVI , LabVIEW, and
BridgeVIEW, contact National Instruments.
© National Instruments Corporation 1-3 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 14

Installation and Configuration
This chapter describes how to install and configure the NI-CAN software
for Windows NT and the PXI-8461 or PXI-8460 hardware.
Install the NI-CAN Software
Install the NI-CAN software for Windows NT before you install your
hardware.
Installation for Windows NT 3.51
1. Log on as Administrator or as a user with Administrator privileges.
The NI-CAN setup program must have
because the program modifies the configuration registry of your
system.
2. Insert the NI-CAN Software for Windows 95/98/NT (Disk 1 of 3) into
an unused drive.
3. In the Run dialog box, type the following:
x
:\setup
where x is the letter of the drive containing the disk (usually a or b).
4. Shut down Windo ws NT and turn off your computer when the setup is
complete.
5. Proceed to the section Install the Hardware.
2
Administrator privileges
Installing for Windows NT 4.0
1. Log on as Administrator or as a user with Administrator privileges.
The NI-CAN setup program must have
because the program modifies the configuration registry of your
system.
2. Select Start»Settings»Control Panel.
© National Instruments Corporation 2-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Administrator privileges
Page 15
Chapter 2 Installation and Configuration
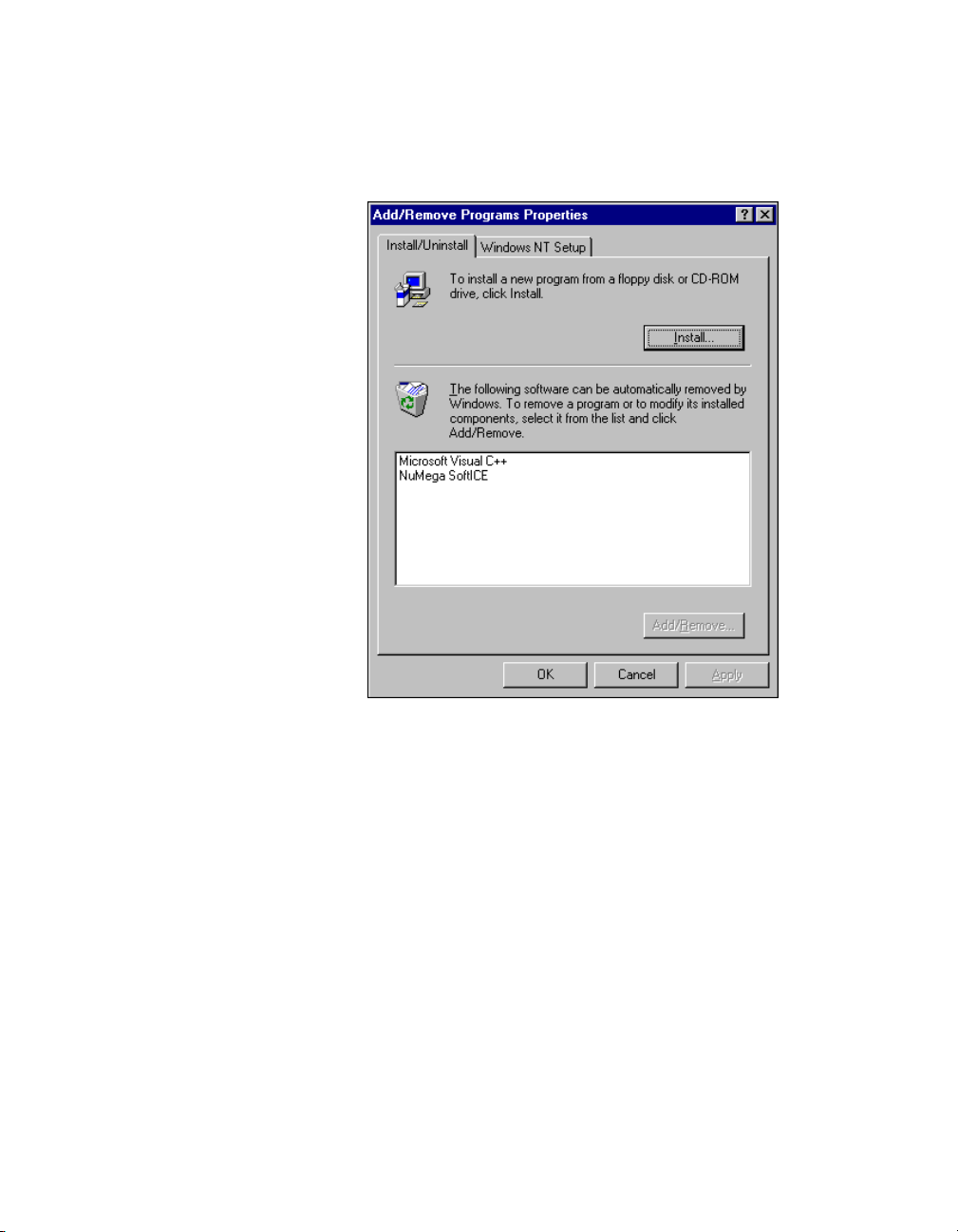
3. Double-click on the Add/Remove Programs icon in the Control Panel
to launch the Add/Remove Programs applet. A dialog box similar to
the one in Figure 2-1 appears.
Figure 2-1. Add/Remove Programs Properties Dialog Box
You can use this same applet to uninstall the NI-CAN software
at a later time. Refer to Appendix A, Uninstalling the Hardware
and Software, for more information.
4. Click on the Install button.
5. When prompted, insert the NI-CAN Software for Windows 95/98/NT
(Disk 1 of 3), and click on the Next button to proceed.
6. The setup wizard guides you through the necessary steps to install
the NI-CAN software. You may go back and change values where
appropriate by clicking on the Back button. If at any time you want to
exit the setup, click on the Cancel button.
7. Shut down Windo ws NT and turn off your computer when the setup is
complete.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT 2-2 www.natinst.com
Page 16

Chapter 2 Installation and Configuration
Install the Hardware
This section describes how to install your PXI-8461or PXI-8460 hardware.
Check the Configuration of Your PXI-8461 or PXI-8460
If you plan to use your CAN board in a system where bus power is
available, you may want to configure the power supply jumpers on your
board. See Appendix B, Cabling Requirements for PXI-8461 High-Speed
CAN, for more information.
If you are installing a low-speed CAN board, you may need to change the
power supply jumpers or termination resistors. See Appendix C, Cabling
Requirements for PXI-8460 Low-Speed CAN, for more information.
Install Your PXI-8461 or PXI-8460
Caution
metal part of your system chassis to discharge electrostatic energy, which can damage
several components on your board.
Before you remove the board from the package, touch the antistatic package to a
1. Make sure that your PXI or CompactPCI chassis is turned off. Keep the
PXI or CompactPCI chassis plugged in so that it remains grounded
while you install the PXI board.
2. Choose an unused PXI or CompactPCI 5 V peripheral slot.
3. Remove the filler panel for the peripheral slot you have chosen.
4. Touch a metal part on your chassis to discharge any static electricity
that might be on your clothes or body.
© National Instruments Corporation 2-3 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 17

Chapter 2 Installation and Configuration
5. Insert the PXI board into the selected 5 V slot. Use the injector/ejector
handle to fully inject the device into place. Figure 2-2 shows how to
install the PXI board into a PXI or CompactPCI chassis.
3
2
ON STANDBY
1
2
3
4
5
6
7
8
4
1
1 Injector/Ejector Handle (In Down Position)
2 PXI Board
3 PXI Chassis
4 Injector/Ejector Rail
Figure 2-2. Installing the PXI Hardware
6. Screw the front panel of the PXI board to the front panel mounting rail
of the PXI or CompactPCI chassis.
7. Turn on your PXI or CompactPCI chassis and start Windows NT.
Connect the Cables
After you have installed your board, connect the CAN cables to your PXI
board. Because exact cabling requirements vary for each application,
National Instruments does not provide cables. Refer to Appendix B,
Cabling Requirements for PXI-8461 High-Speed CAN , or Appendix C,
Cabling Requirements for PXI-8460 Low-Speed CAN, for information
about the cabling requirements of the CAN hardware.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT 2-4 www.natinst.com
Page 18

Configure the NI-CAN Software
The NI-CAN Configuration utility is located in the Windows NT Control
Panel. You can use it to examine or modify the configuration of the
NI-CAN software. The context-sensitive online help, available by
right-clicking on any of the controls on the configuration utility buttons,
includes all the information you need to configure the NI-CAN software.
To use the NI-CAN Configuration utility, you must first log in as
Administrator or as a user with Administrator privileges. To configure
the NI-CAN software, double-click on the NI-CAN Configuration icon in
the Control Panel:
• Windo ws NT 3.51—Open the Control Panel in the Main group of the
Program Manager.
• Windows NT 4.0 or later—Select Start»Settings»Control Panel.
Figure 2-3 shows a CAN interface that is working properly . If no interfaces
are listed under NI-CAN Configuration, refer to the Missing Board in the
NI-CAN Configuration Utility section in Appendix D,
Common Questions,
to resolve the problem.
Chapter 2 Installation and Configuration
Troubleshooting and
Figure 2-3.
To select a particular interface, click on that interface in the list.
When you install a PXI-8461 or PXI-8460, your computer automatically
assigns valid resources to it. Because this resource assignment is automatic,
you do not need to use the Resources dialog box for the PXI hardware, and
you do not need to restart Windows NT.
© National Instruments Corporation 2-5 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
PXI-8461 That Is Working Properly
Page 19

Chapter 2 Installation and Configuration
To view information about the NI-CAN software configuration for the
PXI-8461 or PXI-8460, click on the Settings button. Figure 2-4 shows
the Settings dialog box.
Figure 2-4. NI-CAN Hardware Settings Dialog Box
Each port of the PXI-8461 or PXI-8460 is configured from this tab. Use the
drop-down box nearest the top of the tab to select the physical port number
to configure. For each port, use the
for the CAN Network Interface Object (
drop-down box to select the name
Name
CAN0, CAN1, and so on). You use
this name to refer to the physical port from within your NI-CAN
application.
To access online help for the NI-CAN Configuration utility, click on the
Help button. You can also right-click on a specific control and select
What’s This? from the pop-up menu to see context-sensitive help for the
item you have clicked on.
When you have finished configuring the NI-CAN software, proceed to
Chapter 3, Verify the Installation.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT 2-6 www.natinst.com
Page 20

Verify the Installation
This chapter describes how to verify the hardware and software
installation.
You can use the NI-CAN Diagnostic utility, installed with your NI-CAN
software, to test the hardware and software installation. The utility verifies
that your hardware and software are functioning properly and that the
configuration of your hardware does not conflict with anything else in your
system.
To run the utility, select the NI-CAN Diagnostic item:
• Windo ws NT 3.51—Double-click on the
NI-CAN Software
the
• Windows NT 4.0 or later—Select
Instruments CAN»NI-CAN Diagnostic
When you have started the NI-CAN Diagnostic utility, test your CAN
interfaces by clicking on the
interface by highlighting it and clicking on the
NI-CAN Diagnostic is successful, it puts a checkmark next to the interface
and changes its status from
fails, it puts an X next to the interface, and changes its status from
Failed
to
tested some CAN interfaces.
. Figure 3-1 shows the NI-CAN Diagnostic utility after it has
group of the
Test All
Untested
to
3
NI-CAN Diagnostic
Program Manager
Start»Programs»National
.
button. You can also test one CAN
Test One
Passed
. If the NI-CAN Diagnostic
button. If the
icon in
.
Untested
Figure 3-1.
© National Instruments Corporation 3-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
NI-CAN Diagnostic Utility after Testing
Page 21

Chapter 3 Verify the Installation
You can get details about any tested CAN interface by selecting the
interface and clicking on the Details button. F or each failed CAN interface,
select it and click on the Details button to get a description of the failure.
Use that information and the information in Appendix D, Troubleshooting
and Common Questions, to troubleshoot th e problem. Troubleshooting
information is also available in the online help for the NI-CAN Diagnostic
utility, which you can access by clicking on the Help button.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT 3-2 www.natinst.com
Page 22

Begin to Use the
NI-CAN Software
This chapter helps you get started with the NI-CAN software for
Windows NT.
Using the NI-CAN Software
The functions provided by the NI-CAN software are similar to those
provided by many other device drivers. For example, NI-CAN has open,
close, read, and write functions. NI-CAN provides two different levels of
access to a CAN network: the CAN Network Interface Object and CAN
Objects. Both forms of access support timestamping of incoming data and
various forms of queuing.
The CAN Network Interface Object provides low-level access to a CAN
network. Each CAN Network Interface Object maps to a specific CAN
port, with no limitation on the maximum number of ports or boards you can
use (for example, two PXI-8461 two-port interfaces would provide
through
frames. For example, to transmit a CAN frame, you would specify the
outgoing arbitration ID, frame type (data or remote), data length, and data.
CAN3). You can use this object to transmit and receive entire CAN
4
CAN0
The CAN Objects provide higher level access to a CAN network. Each
CAN Object maps to a specific data item (arbitration ID), and you can use
multiple CAN Objects for a given port. When configuring a CAN Object
for use, you specify the arbitration ID, direction of data transfer, data
length, and how you want the data to be accessed (such as periodically).
For example, you could configure a CAN Object to transmit an outgoing
data frame for a specific arbitration ID every 100 ms. After opening this
CAN Object, you use the write function to provide data to transmit, and the
NI-CAN embedded firmware handles all periodic timing.
For detailed information about the NI-CAN software and functions, refer
to the NI-CAN User Manual and the NI-CAN Programmer Reference
Manual.
© National Instruments Corporation 4-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 23

Chapter 4 Begin to Use the NI-CAN Software
General Programming Considerations
As you begin developing your Win32 NI-CAN application, remember the
following points:
• For your LabVIEW or BridgeVIEW application, you must use the
NI-CAN LabVIEW functions in
• For your C/C++ application, you must include the NI-CAN header file,
nican.h, in your source code.
• The NI-CAN software is accessed through the 32-bit DLL,
nican.dll, either by linking with one of the language interfaces
provided with the NI-CAN software, or by using direct DLL entry
from other programming environments.
• Several sample CAN applications are included with the NI-CAN
software. Use these as a guide for your own application development.
For information about developing your application, refer to the NI-CAN
User Manual. For detailed information about NI-CAN functions and
objects, refer to the NI-CAN Programmer Reference Manual.
nican.llb.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT 4-2 www.natinst.com
Page 24

A
Uninstalling the Hardware
and Software
This appendix describes how to uninstall the PXI-8461 or PXI-8460
hardware and the NI-CAN software from Windows NT.
Uninstalling the Hardware from Windows NT
Because Windo ws NT 3.51 and 4.0 do not maintain hardware information
for the board, you just need to physically remove your PXI hardware from
your computer. To do so, shut down Windows NT, power off your PXI or
CompactPCI chassis, remove any cables attached to your board, and
physically remove the board.
Uninstalling the NI-CAN Software from Windows NT
Note
The following instructions apply to Windows NT 4.0 only . If you are using W indows
NT 3.51, refer to the
to uninstall the NI-CAN software.
readme.txt file in your NI-CAN directory for information on how
Before uninstalling the NI-CAN software, you should remove the PXI
boards from your computer, as explained in the previous section.
© National Instruments Corporation A-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 25

Appendix A Uninstalling the Hardware and Software
Complete the following steps to remove the NI-CAN software from
Windows NT 4.0:
1. Select the Add/Remove Programs icon under Start»Settings»
Control Panel
This dialog box lists the software available for removal.
A dialog box similar to the one in Figure A-1 appears.
.
Figure A-1. Add/Remove Programs Properties Dialog Box
2. Select the NI-CAN software you want to remove and click on the
Add/Remove button. The uninstall program runs and removes all
folders, utilities, device drivers, DLLs, and registry entries associated
with the NI-CAN software.
The uninstall program removes only items that the installation program
installed. If you add anything to a directory that was created by the
installation program, the uninstall program does not delete that directory
because the directory is not empty after the uninstallation. You need to
remove any remaining components yourself.
If you want to reinstall the hardware and software, refer to Chapter 2,
Installation and Configuration.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT A-2 www.natinst.com
Page 26

Cabling Requirements for
PXI-8461 High-Speed CAN
This appendix describes the cabling requirements for the hardware.
Cables should be constructed to meet these requirements and the
requirements of the other CAN or DeviceNet devices in the network.
Connector Pinouts
Depending on the type of PXI board you are installing, it either has DB-9
D-Sub connector(s) or Combicon-style pluggable screw terminal
connector(s).
The 9-pin D-Sub follows the pinout recommended by CiA Draft
Standard 102. Figure B-1 shows the pinout for this connector.
B
1 2345
Optional Ground (V–)
CAN_H
No Connection
V+
Figure B-1.
© National Instruments Corporation B-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Pinout for 9-Pin D-Sub Connector
6
789
No Connection
CAN_L
V–
No Connection
Shield
Page 27

Appendix B Cabling Requirements for PXI-8461 High-Speed CAN
The 5-pin Combicon-style pluggable screw terminal follows the pinout
required by the DeviceNet Specification. Figure B-2 shows the pinout for
this connector.
V–
12345
Figure B-2. Pinout for 5-Pin Combicon-Style Pluggable Screw Terminal
CAN_H and CAN_L are signal lines that carry the data on the CAN
network. These signals should be connected using twisted-pair cable.
The V+ and V– pins are used to supply bus power to the CAN physical
layer if external power is required for the CAN physical layer . If internal
power for the CAN physical layer is used, the V– pin serves as the refe rence
ground for CAN_H and CAN_L. See the next section, Power Supply
Information for the High-Speed CAN Ports, for more information.
CAN_L
Shield
CAN_H
V+
Power Supply Information for the High-Speed CAN Ports
For the PXI-8461, a jumper controls the source of power for the CAN
physical layer. F or the one-port boards and port one of the two-port boards,
power is configured with jumper J5. For port two of the two-port boards,
power is configured with jumper J6. The location of these jumpers is shown
in Figure B-3.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT B-2 www.natinst.com
Page 28

Appendix B Cabling Requirements for PXI-8461 High-Speed CAN
3 4
2
1
5
1 Power Supply Jumper J6
2 Power Supply Jumper J5
3 Assembly Number
4 Product Name
5 Serial Number
Figure B-3. PXI-8461 Part Locator Diagram
Connecting pins 1 and 2 of a jumper configures the CAN physical layer to
be powered externally (from the bus cable po wer). In this configuration, the
power must be supplied on the V+ and V– pins on the port connector.
Connecting pins 2 and 3 of a jumper configures the CAN physical layer to
be powered internally (from the board). In this configuration, the V– signal
serves as the reference ground for the isolated signals.
© National Instruments Corporation B-3 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 29

Appendix B Cabling Requirements for PXI-8461 High-Speed CAN
Figure B-4 shows how to configure your jumpers for internal or external
power supplies.
INT EXT
123123
a. Internal Power Mode
Figure B-4. Power Source Jumpers
The CAN physical layer is still isolated regardless of the power source
chosen.
Bus Power Supply Requirements
If the CAN physical layer is powered from a bus power supply, the power
supply should be a DC power supply with an output of 10 V to 30 V. The
power requirements for the CAN ports for bus-powered conf igurations are
shown in T able B-1. You should take these requirements into account when
determining requirements of the bus power supply for the system.
Table B-1. Power Requirements for the CAN Physical Layer for
Bus-Powered Versions
Characteristic Specification
INT EXT
b. External Power Mode
Voltage requirement V+ 10 to 30 VDC
Current requirement 40 mA typical
100 mA maximum
PXI-8461 or PXI-8460 and NI-CAN for Windows NT B-4 www.natinst.com
Page 30

Cable Specifications
Cables should meet the physical medium requirements specified in
ISO 11898, shown in Table B-2.
Belden cable (3084A) meets all of those requirements and should be
suitable for most applications.
Appendix B Cabling Requirements for PXI-8461 High-Speed CAN
Cable Lengths
Table B-2.
Impedance 108 Ω minimum, 120 Ω nominal,
Length-related resistance 70 mΩ/m nominal
Specific line delay 5 ns/m nominal
The allowable cable length is affected b y the characteristics of the cabling
and the desired bit transmission rates. Detailed cable length requirements
can be found in ISO 11898, CiA Draft Standard 102, and the DeviceNet
Specification.
ISO 11898 specifies 40 m total cable length with a maximum stub length
of 0.3 m for a bit rate of 1 Mb/s. The ISO 11898 specification says that
significantly longer cable lengths may be allowed at lower bit rates, but
each node should be analyzed for signal integrity problems.
Table B-3 lists the DeviceNet cable length specifications.
ISO 11898 Specifications for Characteristics of a CAN_H and
CAN_L Pair of Wires
Characteristic Value
132 Ω maximum
Table B-3.
Baud Rate Trunk Length
500 kb/s 100 m (328 ft) 6 m (20 ft) 39 m (128 ft)
250 kb/s 250 m (820 ft) 6 m (20 ft) 78 m (256 ft)
125 kb/s 500 m (1640 ft) 6m (20ft) 156 m (512 ft)
© National Instruments Corporation B-5 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
DeviceNet Cable Length Specifications
Drop Length
Maximum
Drop Length
Cumulative
Page 31

Appendix B Cabling Requirements for PXI-8461 High-Speed CAN
Number of Devices
The maximum number of devices that you can connect to a CAN port
depends on the electrical characteristics of the devices on the network. If all
of the devices meet the requirements of ISO 11898, at least 30 devices may
be connected to the bus. Higher numbers of devices may be connected if the
electrical characteristics of the devices do not degrade signal quality below
ISO 11898 signal level specifications. If all of the devices on the network
meet the DeviceNet specifications, 64 devices may be connected to the
network.
Cable Termination
The pair of signal wires (CAN_H and CAN_L) constitutes a transmission
line. If the transmission line is not terminated, each signal change on the
line causes reflections that may cause communication failures.
Because communication flows both ways on the CAN bus, CAN requires
that both ends of the cable be terminated. However, this requirement does
not mean that every de vice should have a termination resistor. If multiple
devices are placed along the cable, only the devices on the ends of the cable
should have termination resistors. See Figure B-5 for an example of where
termination resistors should be placed in a system with more than two
devices.
CAN
Device
CAN
Device
Figure B-5.
CAN_H
CAN_L
Termination Resistor Placement
CAN
Device
CAN
Device
The termination resistors on a cable should match the nominal impedance
of the cable. ISO 11898 requires a cable with a nominal impedance of
120 Ω; therefore, a 120
Ω resistor should be used at each end of the cable.
Each termination resistor should be capable of dissipating at least 0.25 W
of power.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT B-6 www.natinst.com
Page 32

Cabling Example
Figure B-6 shows an example of a cable to connect two CAN devices. For
the internal power configuration, no V+ connection is required.
Appendix B Cabling Requirements for PXI-8461 High-Speed CAN
5-Pin
Combicon
9-Pin
D-Sub
Pin 7Pin 4 Pin 7 Pin 4
Pin 2Pin 2
Pin 5Pin 3
Pin 9Pin 5
Pin 3Pin 1
CAN_H
120Ω 120Ω
CAN_L
Shield
V+
V–
Power
Connector
V+
V–
Figure B-6.
Cabling Example
9-Pin
D-Sub
Pin 2 Pin 2
Pin 5 Pin 3
Pin 9 Pin 5
Pin 3 Pin 1
5-Pin
Combicon
© National Instruments Corporation B-7 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 33

Cabling Requirements for
PXI-8460 Low-Speed CAN
This appendix describes the cabling requirements for the PXI-8460
hardware.
Cables should be constructed to meet these requirements, as well as the
requirements of the other CAN devices in the network.
Connector Pinouts
The PXI-8460 has DB-9 D-Sub connector(s). The 9-pin D-Sub follows the
pinout recommended by CiA DS 102. Figure C-1 shows the pinout for this
connector.
C
1 2345
Optional Ground (V–)
CAN_H
No Connection
V+
Figure C-1.
© National Instruments Corporation C-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Pinout for 9-Pin D-Sub Connector
6
789
No Connection
CAN_L
V–
No Connection
Shield
Page 34

Appendix C Cabling Requirements for PXI-8460 Low-Speed CAN
CAN_H and CAN_L are signal lines that carry the data on the CAN
network. These signals should be connected using twisted-pair cable.
The V+ and V– pins are used to supply bus power to the CAN physical
layer if external power is required for the CAN physical layer . If internal
power for the CAN physical layer is used, the V- pin serves as the reference
ground for CAN_H and CAN_L. See the next section, Power Supply
Information for the Low-Speed CAN Ports, for more information.
Power Supply Information for the Low-Speed CAN Ports
For port one of the PXI-8460, power is configured with jumper J5. For port
two of the PXI-8460, power is configured with jumper J6. These jumpers
are shown in Figure C-2.
3 4
2
1
1 Power Supply Jumper J6
2 Power Supply Jumper J5
6
3 Assembly Number
4 Product Name
Figure C-2.
PXI-8460 Parts Locator Diagram
5
5 Serial Number
6 Termination Resistor Sockets
Connecting pins 1 and 2 of a jumper configures the CAN physical layer to
be powered externally (from the bus cable po wer). In this configuration, the
power must be supplied on the V+ and V– pins on the port connector.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT C-2 www.natinst.com
Page 35

Appendix C Cabling Requirements for PXI-8460 Low-Speed CAN
Connecting pins 2 and 3 of a jumper configures the CAN physical layer to
be powered internally (from the card). In this configuration, the V– signal
serves as the reference ground for the isolated signals. Even if the CAN
physical layer is powered internally , the fault-tolerant CAN transceiv er still
requires bus power to be supplied in order for it to monitor the power
supply (battery) voltage.
Figure C-3 shows how to configure your jumpers for internal or external
power supplies.
INT EXT
123123
a. Internal Power Mode
Figure C-3. Power Source Jumpers
The CAN physical layer is still isolated regardless of the power source
chosen.
Bus Power Supply Requirements
If the CAN physical layer is powered from a bus power supply, the power
supply should be a DC power supply with an output of 8 V to 27V. The
power requirements for the CAN ports for Bus-Powered configurations are
shown in Table C-1. You should take these requirements into account when
determining requirements of the bus power supply for the system.
Table C-1. Power Requirements for the Low-Speed CAN Physical Layer for
Bus-Powered Versions
Characteristic Specification
Voltage requirement V+ 8–27 VDC
INT EXT
b. External Power Mode
Current requirement 40 mA typical
100 mA maximum
© National Instruments Corporation C-3 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 36

Appendix C Cabling Requirements for PXI-8460 Low-Speed CAN
Cable Specifications
Cables should meet the physical medium requirements specified in
ISO 11519-2, shown in Table C-2.
Belden cable (3084A) meets all of those requirements, and should be
suitable for most applications.
Table C-2.
Length-related resistance 90 mΩ/m nominal
Length-related capacitance:
CAN_L and ground, CAN_H and
ground, CAN_L and CAN_H
Number of Devices
The maximum number of devices depends on the electrical characteristics
of the devices on the network. If all of the devices meet the requirements
of ISO 11519-2, at least 20 devices may be connected to the bus. Higher
numbers of devices may be connected if the electrical characteristics of
the devices do not degrade signal quality below ISO 11519-2 signal level
specifications.
ISO 11519-2 Specifications for Characteristics of a CAN_H and
CAN_L Pair of Wires
Characteristic Value
30 pF/m nominal
PXI-8461 or PXI-8460 and NI-CAN for Windows NT C-4 www.natinst.com
Page 37

Low-Speed Termination
Every device on the low-speed CAN network requires a termination
resistor for each CAN data line: R
Figure C-4 shows termination resistor placement in a low-speed CAN
network.
Appendix C Cabling Requirements for PXI-8460 Low-Speed CAN
for CAN_H and R
RTH
for CAN_L.
RTL
Low-speed
CAN Device
RTL CAN_L RTH CAN_H
CAN_H
CAN_L
Figure C-4.
Low-speed
CAN Device
RTL CAN_L RTH CAN_H
Termination Resistor Placement for Low-Speed CAN
Low-speed
CAN Device
RTL CAN_L RTH CAN_H
The following sections explain ho w to determine the correct resistor values
for your PXI-8460, and how to replace those resistors, if necessary.
Determining the Necessary Termination Resistance for Your Board
Unlike high-speed CAN, low-speed CAN requires termination at the
low-speed CAN transceiver instead of on the cable. The termination
requires one resistor for each CAN line. This configuration allows the
Philips fault-tolerant CAN transceiver to detect any of seven network
faults. You can use your PXI-8460 to connect to a low-speed CAN network
having from two to 32 nodes as specified by Philips (including the port on
the PXI-8460 as a node). You can also use the PXI-8460 to communicate
with individual low-speed CAN devices. It is important to determine the
overall termination of your existing network, or the termination of your
individual device, before connecting it to a PXI-8460 port. Philips
recommends an overall RTH and RTL termination of 100 to 500 Ω (each)
for a properly terminated low-speed network. The ov erall network
termination may be determined as follows:
1
------------------------- -
R
RTH overall
© National Instruments Corporation C-5 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
†
1
------------------------
R
RTH node 1
1
------------------------
R
RTH node 2
1
------------------------
R
RTH node 3
1
------------------------------- -+++=
R
RTH or node n...
Page 38

Appendix C Cabling Requirements for PXI-8460 Low-Speed CAN
Philips also recommends an individual device R TH and R TL termination of
500 Ω to 16 kΩ. The PXI-8460 board ships with mounted RTH and RTL
values of 510 Ω ±5% per port. The PXI-8460 kit also includes a pair of
15 kΩ ±5% resistors for each port. After determining the termination of
your existing network or device, you can use the following formula to
indicate which value should be placed on your PXI-8460 board in order to
produce the proper overall R TH and R TL termination of 100 to 500 Ω upon
connection of the board:
R
RTH overall*
------------------------------------------------------------------------------------------------------------------------------- ------------=
†
*R
RTH overall
**R
RTH of low-speed CAN interface
†R
RTH
should be between 100 and 500 Ω
= R
RTL
---------------------------------------------------------------- -
R
RTH of low-speed CAN interface**
1
= 510 Ω ±5% (mounted) or 15 kΩ ±5% (in kit)
1
--------------------------------------------------------------+
R
RTH of existing network or device
1
As the formula indicates, the 510 Ω ±5% shipped on your board will work
with properly terminated networks having a total RTH and RTL
termination of 125 to 500 Ω, or individual devices having an RTH and RTL
termination of 500 Ω to 16 kΩ. F or communication with a network having
an overall RTH and RTL termination of 100 to 125 Ω, you will need to
replace the 510 Ω resistors with the 15 kΩ resistors in the kit. Please refer
to the next section, Replacing the Termination Resistors.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT C-6 www.natinst.com
Page 39

Appendix C Cabling Requirements for PXI-8460 Low-Speed CAN
Replacing the Termination Resistors
Follow these steps to replace the termination resistors, after you have
determined the correct value in the previous section, Determining the
Necessary Termination Resistance for Your Board.
1. Remove the termination resistors on your PXI-8460. Figure C-5 shows
the location of the termination resistor sockets on a PXI-8460.
1
2
1 Port 1 Termination Resistors 2 Port 2 Termination Resistors
Figure C-5.
Location of Termination Resistors on a
PXI-8460
2. Cut and bend the lead wires of the resistors you want to install. Refer
to Figure C-6.
0.5 in
(13 mm)
0.165 in
(4 mm)
Figure C-6.
© National Instruments Corporation C-7 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Preparing Lead Wires of Replacement Resistors
Page 40

Appendix C Cabling Requirements for PXI-8460 Low-Speed CAN
3. Insert the replacement resistors into the empty sockets.
4. Refer to Install the Hardware, in Chapter 2, Installation and
Configuration, to complete the hardware installation.
Cabling Example
Figure C-7 shows an example of a cable to connect two low-speed CAN
devices. For the internal power configuration, the V+ connection is
required for the low-speed transceiv er to operate as specif ied in the Philips
data sheet.
5-Pin
Combicon
9-Pin
D-Sub
Pin 7Pin 4 Pin 7 Pin 4
Pin 2Pin 2
Pin 5Pin 3
Pin 9Pin 5
Pin 3Pin 1
CAN_H
CAN_L
GND
V+
V–
Power
Connector
V+
V–
Figure C-7.
Cabling Example
9-Pin
D-Sub
Pin 2 Pin 2
Pin 5 Pin 3
Pin 9 Pin 5
Pin 3 Pin 1
5-Pin
Combicon
PXI-8461 or PXI-8460 and NI-CAN for Windows NT C-8 www.natinst.com
Page 41

Troubleshooting and
Common Questions
This appendix describes how to troubleshoot problems and answers some
common questions.
Missing Board in the NI-CAN Configuration Utility
The NI-CAN Configuration utility contains configuration information for
all of the CAN hardware it is aware of that is installed in your system. To
start the NI-CAN Configuration utility, double-click on the NI-CAN
Configuration icon in the Control Panel:
• Windows NT 3.51–Open the Control Panel in the Main group of
the Program Manager.
• Windows NT 4.0 or later–Select Start»Settings»Control Panel.
If your board is not listed under NI-CAN Configuration, the board is not
properly installed. For the PXI-8461 or PXI-8460, this means that the board
is not physically present in the system. If your board is firmly plugged into
its slot and the problem persists, contact National Instruments.
D
Diagnostic Utility Failures
The following sections explain common error messages generated by the
NI-CAN Diagnostic utility.
Resource Errors
This error occurs if the memory resource or interrupt resource assigned to
a board conflicts with the resources being used by other hardware in the
system. If a resource error occurs, click on the Resources button in the
NI-CAN Configuration utility to view the board resources. For the
PXI-8461 or PXI-8460, if legacy hardware in your system is using the
resources, change the resource configuration of the legacy hardware. If you
need help, refer to the documentation that came with your hardware. If the
problem persists, contact National Instruments.
© National Instruments Corporation D-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 42

Appendix D Troubleshooting and Common Questions
NI-CAN Software Problem Encountered
This error occurs if the NI-CAN Diagnostic utility detects that it is unable
to communicate correctly with the hardware using the installed NI-CAN
software. If you get this error, shut down your computer , restart it, and run
the NI-CAN Diagnostic utility again. If the problem persists, try
reinstalling the NI-CAN software for Windows NT.
Missing Board in Diagnostic Utility
If your board is physically installed in your system, but is not listed in the
NI-CAN Diagnostic utility , check to see if the NI-CAN Configuration
utility has detected the board. For more information, refer to the Missing
Board in the NI-CAN Configuration Utility section earlier in this appendix.
Hardware Problem Encountered
This error occurs if the NI-CAN Diagnostic utility detects a defect in the
hardware. If you get this error, write do wn the numeric code shown with the
error and contact National Instruments. Depending on the cause of the
hardware failure, you may need to repair or replace your board.
Common Questions
How can I determine which type of CAN hardware I have installed?
Run the NI-CAN Configuration utility. To run the utility, select
Start»Settings»Control Panel»NI-CAN Configuration. If any hardware
is correctly installed, it is listed under National Instruments CAN
Interfaces.
How can I determine which version of the NI-CAN software I have
installed?
Run the NI-CAN Diagnostic utility. To run the utility, select the NI-CAN
Diagnostic item under Start»Programs»National Instruments CAN.
The NI-CAN Diagnostic utility displays information about the version of
the NI-CAN software currently installed.
How many PXI-8461 or PXI-8460 boards can I configure for use with
my NI-CAN software?
The NI-CAN software for Windo ws NT can be configured to communicate
with up to 10 boards.
PXI-8461 or PXI-8460 and NI-CAN for Windows NT D-2 www.natinst.com
Page 43

Appendix D Troubleshooting and Common Questions
How do I connect a CAN cable to my CAN port?
You will need to use an appropriate cable. For information about cabling
requirements for National Instruments CAN hardware, refer to
Appendix B, Cabling Requirements for PXI-8461 High-Speed CAN or
Appendix C, Cabling Requirements for PXI-8460 Low-Sp eed CAN.
Are interrupts required for the PXI-8461 and PXI-8460?
Yes, one interrupt per board is required.
What do I do if the NI-CAN Diagnostic utility fails with an error?
Refer to the Diagnostic Utility Failures section in this appendix for specific
information about what might cause the NI-CAN Diagnostic utility to fail.
If you have already completed the troubleshooting steps, contact National
Instruments.
How do I use an NI-CAN language interface?
For information about using NI-CAN language interfaces, refer to
Chapter 3, Developing Your Application
,
in the NI-CAN User Manual.
How do I use NI-CAN from within LabVIEW or BridgeVIEW?
For information about using NI-CAN from within LabVIEW or
BridgeVIEW, refer to Chapter 3, Developing Your Application
,
in the
NI-CAN User Manual.
Why does the uninstall program leave some components installed?
The uninstall program removes only items that the installation program
installed. If you add anything to a directory that was created by the
installation program, the uninstall program does not delete that directory
because the directory is not empty after the uninstallation. You must
remove any remaining components yourself.
© National Instruments Corporation D-3 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 44

Specifications
This appendix describes the physical characteristics of the hardware and
the recommended operating conditions.
PXI-8461 One Port and Two Port
Dimensions.............................................PXI 3U Module
Power requirement.................................+5 VDC 500 mA typical
I/O connector.......................................... 9-pin D-Sub for each port
Operating environment
Component temperature..................0 to 55 °C
Relative humidity............................10% to 90%, noncondensing
E
100 by 160 mm
(3.94 by 6.30 in.)
(standard)
or
5-pin Combicon-style pluggable
DeviceNet screw terminal
Storage environment
Temperature....................................–20 to 70 °C
Relative humidity............................10% to 90%, noncondensing
PXI-8460 One Port and Two Port
Dimensions.............................................PXI 3U Module
100 by 160 mm
(3.94 by 6.30 in.)
Power requirement.................................+5 VDC 500 mA typical
I/O connector.......................................... 9-pin D-Sub for each port
© National Instruments Corporation E-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 45

Appendix E Specifications
Operating environment
Component temperature ..................0 to 55 °C
Relative humidity ............................10% to 90%, noncondensing
Storage environment
Temperature.....................................–20 to 70 °C
Relative humidity ............................10% to 90%, noncondensing
High-Speed CAN Port Characteristics for Bus-Powered Ports
Power requirement..................................10–30 V, 40 mA typical
100 mA maximum
Isolation ..................................................500 VDC optical
Low-Speed CAN Port Characteristics for Bus-Powered Ports
Power requirement..................................8–27 V, 40 mA typical
100 mA maximum
Isolation ..................................................500 VDC optical
PXI-8461 or PXI-8460 and NI-CAN for Windows NT E-2 www.natinst.com
Page 46

Technical Support Resources
This appendix describes the comprehensive resources available to you in
the Technical Support section of the National Instruments Web site and
provides technical support telephone numbers for you to use if you have
trouble connecting to our We b site or if you do not have internet access.
NI Web Support
To provide you with immediate answers and solutions 24 hours a day,
365 days a year, National Instruments maintains extensi ve online technical
support resources. They are available to you at no cost, are updated daily,
and can be found in the Technical Support section of our Web site at
www.natinst.com/support.
Online Problem-Solving and Diagnostic Resources
• KnowledgeBase—A searchable database containing thousands of
frequently asked questions (F A Qs) and their corresponding answers or
solutions, including special sections devoted to our newest products.
The database is updated daily in response to new customer experiences
and feedback.
• Troubleshooting Wizards—Step-by-step guides lead you through
common problems and answer questions about our entire product line.
Wizards include screen shots that illustrate the steps being described
and provide detailed information ranging from simple getting started
instructions to advanced topics.
• Product Manuals—A comprehensive, searchable library of the latest
editions of National Instruments hardware and software product
manuals.
• Hardware Reference Database—A searchable database containing
brief hardware descriptions, mechanical drawings, and helpful images
of jumper settings and connector pinouts.
• Application Notes—A library with more than 100 short papers
addressing specific topics such as creating and calling DLLs,
developing your own instrument driver software, and porting
applications between platforms and operating systems.
F
© National Instruments Corporation F-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 47

Appendix F Technical Support Resources
Software-Related Resources
• Instrument Driver Network—A library with hundreds of instrument
drivers for control of standalone instruments via GPIB, VXI, or serial
interfaces. You also can submit a request for a particular instrument
driver if it does not already appear in the library.
• Example Programs Database—A database with numerous,
non-shipping example programs for National Instruments
programming environments. You can use them to complement the
example programs that are already included with National Instruments
products.
• Software Library—A library with updates and patches to application
software, links to the latest versions of driver software for National
Instruments hardware products, and utility routines.
Worldwide Support
National Instruments has offices located around the globe. Many branch
offices maintain a Web site to provide information on local services. You
can access these Web sites from
www.natinst.com/worldwide.
If you have trouble connecting to our Web site, please contact your local
National Instruments office or the source from which you purchased your
National Instruments product(s) to obtain support.
For telephone support in the United States, dial 512 795 8248. For
telephone support outside the United States, contact your local branch
office:
Australia 03 9879 5166, Austria 0662 45 79 90 0, Belgium 02 757 00 20,
Brazil 011 284 5011, Canada (Calgary) 403 274 9391,
Canada (Ontario) 905 785 0085, Canad a (Québec) 514 694 8521,
China 0755 3904939, Denmark 45 76 26 00, Finland 09 725 725 11,
France 01 48 14 24 24, Germany 089 741 31 30, Greece 30 1 42 96 427
Hong Kong 2645 3186, India 91805275406, Israel 03 6120092,
Italy 02 41309 1, Japan 03 5472 2970, Korea 02 596 7456,
Mexico (D.F.) 5 280 7625, Mexico (Monterrey) 8 357 7695,
Netherlands 0348 433466, Norway 32 27 73 00, Singapore 2265886,
Spain (Barcelona) 93 582 025 1, Spain (Madrid) 91 640 0085,
Sweden 08 58 7 895 00, Switzerland 056 200 51 51,
Taiwan 02 2377 1200, United Kingdom 01635 523545
PXI-8461 or PXI-8460 and NI-CAN for Windows NT F-2 www.natinst.com
Page 48

Glossary
Prefix Meaning Value
n- nano- 10
m- milli- 10
k- kilo- 10
M- mega- 10
° degrees
Ω ohms
% percent
A amperes
ANSI American National Standards Institute
bbits
Bbytes
–9
–3
3
6
C Celsius
CAN Controller Area Network
CiA CAN in Automation
DC direct current
DLL dynamic link library
FCC Federal Communications Commission
ft feet
HMI Human Machine Interface
Hz hertz
IEEE Institute of Electrical and Electronic Engineers
in. inches
IRQ interrupt request
© National Instruments Corporation G-1 PXI-8461 or PXI-8460 and NI-CAN for Windows NT
Page 49

Glossary
ISO International Standards Organization
LED light-emitting diode
m meters
PC personal computer
PCI peripheral component interconnect
PCMCIA Personal Computer Memory Card International Association
PLC Programmable Logic Controller
RAM random-access memory
resource hardware settings used by National Instruments CAN hardware, including
an interrupt request level (IRQ) and an 8 KB physical memory range (such
as D0000 to D1FFF hex)
s seconds
V volts
VDC volts direct current
VXI VME eXtensions for Instrumentation
Wwatts
PXI-8461 or PXI-8460 and NI-CAN for Windows NT G-2 www.natinst.com
 Loading...
Loading...