

Page 1

USER MANUAL
NI roboRIONI roboRIO
POWERPOWER
STATUSSTATUS
RADIORADIO
SPISPI
CS0CS0
CS1CS1
5V5V
CS2CS2
CS3CS3
SCLKSCLK
MOSIMOSI
INPUTINPUT
CANCAN
7-16 V7-16V
45W
MA
X45W
M
A
X
L (GRN)L (GRN)
H (YEL)H (YEL)
I2C
SCLSCL
3.3V SDA3.3V SDA
RS-232RS-232
TXDTXD
RXDRXD
RSLRSL
MISOMISO
3.3V3.3V
COMMCOMM
MODEMODE
RSLRSL
RELAYRELAY
0 1
FWDFWD
5V5V
S
S
REVREV
2 3 0 1
133
33
2 3
3
2 1
0
79 8
6 5
4
4 5 6
7 8 9
0 1
2
3
ANALOG INANALOG IN
RESETRESET
ACCELEROMETERACCELEROMETER
PWMPWM
DIODIO
Y
Z
X
USERUSER
S
5V5V
S
6V
6V
5
6 7 8
14
9 10
15
161718
12
1
2
3
4
13
11
NI roboRIO
RIO Device for Robotics
The NI roboRIO is a portable reconfigurable I/O (RIO) device that students can use to design
control, robotics, and mechatronics systems used in the FIRST Robotics Competition (FRC).
This document contains pinouts, connectivity information, dimensions, and mounting
instructions for the NI roboRIO. The NI roboRIO provides the I/O shown in Figure 1 and
connects to a host computer over USB and 10/100 Ethernet.
Figure 1. NI roboRIO Features
1 Digital input and output (DIO) port
2 RS-232 port
3I
4CAN port
5 Power connector
6USB Device port
7 USB Host retention mount
8 USB Host ports
9 Ethernet port
2
C port
10 Serial peripheral interface bus (SPI) port
11 LEDs
12 Pulse-width modulation (PWM) port
13 myRIO Expansion Port (MXP)
14 MXP retention mount
15 User and Reset buttons
16 Analog input (AI) port
17 Relay port
18 Robot signal light (RSL) port
Page 2

Contents
Safety Information .................................................................................................................... 3
Electromagnetic Compatibility Guidelines............................................................................... 3
Hardware Block Diagram ......................................................................................................... 4
Setting Up the NI roboRIO.......................................................................................................5
Wiring Power to the NI roboRIO ..................................................................................... 5
Powering On the NI roboRIO ........................................................................................... 5
Connecting the NI roboRIO to a Network........................................................................6
Preparing the NI roboRIO for Competition ...................................................................... 6
User Power........................................................................................................................ 6
Pinouts ...................................................................................................................................... 8
MXP.................................................................................................................................. 8
CAN Port .......................................................................................................................... 9
2
C Port .............................................................................................................................10
I
RS-232 Port....................................................................................................................... 10
DIO Port............................................................................................................................ 11
RSL Port ...........................................................................................................................11
Relay Port ......................................................................................................................... 12
AI Port...............................................................................................................................12
PWM Port ......................................................................................................................... 13
SPI Port .............................................................................................................................13
Signal Ground References ........................................................................................................14
Interfaces................................................................................................................................... 14
AI Channels ...................................................................................................................... 14
AO Channels.....................................................................................................................14
DIO, PWM, and Relay Lines............................................................................................ 15
UART and RS-232 Lines.................................................................................................. 16
SPI Lines...........................................................................................................................16
2
C Lines ........................................................................................................................... 16
I
USB Device Port............................................................................................................... 16
USB Host Port .................................................................................................................. 16
Accelerometer ........................................................................................................................... 17
Converting Raw Data Values to Voltage.................................................................................. 17
Front Panel Buttons .................................................................................................................. 17
Reset Button...................................................................................................................... 17
User Button ....................................................................................................................... 18
LED Indications ........................................................................................................................ 18
Power LED .......................................................................................................................18
Status LED ........................................................................................................................ 19
Radio LED ........................................................................................................................ 19
Comm LED....................................................................................................................... 20
Mode LED ........................................................................................................................20
RSL (Safety) LED ............................................................................................................ 21
Physical Dimensions................................................................................................................. 22
2 | ni.com | NI roboRIO User Manual
Page 3

Mounting the NI roboRIO ........................................................................................................ 25
Method One: Using Cable Ties to Secure One Edge of the
NI roboRIO to Perfboard............................................................................................... 25
Method Two: Using Cable Ties to Secure One Corner of the
NI roboRIO to Perfboard............................................................................................... 27
Method Three: Using Screws to Secure the Bottom of the
NI roboRIO to a Metal Plate ......................................................................................... 30
Compatible USB and Ethernet Cables...................................................................................... 30
Warranty ................................................................................................................................... 31
Worldwide Support and Services ............................................................................................. 31
Safety Information
Caution Do not operate the hardware in a manner not specified in the user
documentation. Misuse of the hardware can result in a hazard. You can compromise
the safety protection if the hardware is damaged in any way. If the hardware is
damaged, contact National Instruments for repair.
Clean the hardware with a soft, nonmetallic brush. Make sure that the hardware is completely
dry and free from contaminants before returning it to service.
Electromagnetic Compatibility Guidelines
This product was tested and complies with the regulatory requirements and limits for
electromagnetic compatibility (EMC) stated in the product specifications. These requirements
and limits provide reasonable protection against harmful interference when the product is
operated in the intended operational electromagnetic environment.
This product is intended for use in industrial locations. However, harmful interference may
occur in some installations, when the product is connected to a peripheral device or test object,
or if the product is used in residential or commercial areas. To minimize interference with radio
and television reception and prevent unacceptable performance degradation, install and use this
product in strict accordance with the instructions in the product documentation.
Furthermore, any modifications to the product not expressly approved by National Instruments
could void your authority to operate it under your local regulatory rules.
Caution To ensure the specified EMC performance, the maximum length for DIO,
2
RS-232, I
The maximum length for USB cables is 5.0 m (16.40 ft). The maximum length for
Ethernet cables is 30.0 m (98.43 ft). Refer to the Compatible USB and Ethernet
Cables section of this document for information about compatible USB and Ethernet
cables.
C, CAN, SPI, PWM, AI, Relay, and RSL signal wires is 2.0 m (6.56 ft).
NI roboRIO User Manual | © National Instruments | 3
Page 4

Hardware Block Diagram
CAN
Port
Xilinx Zynq-7020
Processor/FPGA
(LabVIEW RT)
USB
Device
Port
USB
Hosts
Port
10/100
Ethernet
Port
Status LED
Comm LED
Radio LED
Mode LED
R
SL LED
Power LED
+
3.3 V
+5.0 V
16 16
2
4
UART
DIO
Analog Out
Analog In
myRIO
Expansion
Port (MXP)
User
Button
Reset
Button
PWM
Port
10
10
+6.0 V
PWM
SPI
SPI Port
+5.0 V
+3.3 V
7
7
2
RS-232
RS-232
Port
2
I2C
I2C
Port
2
+3.3 V
DIO
Port
DIO
10 10
+5.0 V
Watchdog
Nonvolantile
Memory
DDR3
Acceler-
ometer
RSL
RSL
Port
Relay
8
8
RELAY
Port
4
+5.0 V
AI
ANALOG IN
Port
Figure 2 shows the arrangement and functions of NI roboRIO components.
Figure 2. NI roboRIO Hardware Block Diagram
4 | ni.com | NI roboRIO User Manual
Page 5

Setting Up the NI roboRIO
Wiring Power to the NI roboRIO
The NI roboRIO requires an external power supply that meets the specifications in the Power
Requirements section of the NI roboRIO Specifications. The NI roboRIO filters and regulates
the supplied power and provides power for all of the I/O and user voltage. The NI roboRIO has
one layer of reverse-voltage protection. Complete the following steps to connect a power supply
to the chassis.
1. Ensure that the power supply is turned off.
Caution Do not install or remove the power connector from the front panel of the
NI roboRIO while power is applied.
2. Connect the positive lead of the power supply to the V terminal of the COMBICON power
connector shipped with the NI roboRIO, and tighten the terminal screw. Figure 3 shows the
terminal screws, which secure the wires in the screw terminals, and the connector screws,
which secure the power connector on the front panel.
Figure 3. NI roboRIO COMBICON Power Connector
2
1
1 Terminal Screws 2 Connector Screws
3. Connect the negative lead of the power supply to the C terminal of the power connector and
tighten the terminal screw.
4. Install the power connector on the front panel of the NI roboRIO and tighten the connector
screws.
5. Turn on the power supply.
V
C
2
Powering On the NI roboRIO
When you apply power, the NI roboRIO runs a power-on self test (POST). During the POST,
the Power and Status LEDs turn on. The Status LED turns off, indicating that the POST is
complete. If the LEDs do not behave in this way when the system powers on, refer to the LED
Indications section.
NI roboRIO User Manual | © National Instruments | 5
Page 6

Connecting the NI roboRIO to a Network
Connect the NI roboRIO to an Ethernet network using the Ethernet port. Use a standard
Category 5 (CAT-5) or better shielded, twisted-pair Ethernet cable to connect the NI roboRIO
to an Ethernet hub, router, or directly to a computer.
Caution To prevent data loss and to maintain the integrity of your Ethernet
installation, do not use a cable longer than 30 m.
The first time you power up the chassis, it attempts to initiate a DHCP network connection. If
the chassis is unable to initiate a DHCP connection, it connects to the network with a link-local
IP address with the form
169.254.x.x.
Preparing the NI roboRIO for Competition
For information about configuring the controller for competitive use, refer to the Tutorials tab
in the Getting Started window of LabVIEW for FRC.
User Power
Table 1 describes the user voltage rails for powering external sensors and peripherals. The rails
are independent from the power supplies of internal systems, such as the processor and memory.
Table 1. NI roboRIO Voltage Rails
Voltage Rail Description
+6 V Power from PWM ports for use with servos.
+5 V Power for DIO and AI ports for sensors, and power for the MXP for
powering expansion circuits.
+3.3 V Power for I2C, SPI, and the MXP.
6 | ni.com | NI roboRIO User Manual
Page 7

Input Voltage Brownout Behavior
The NI roboRIO input voltage range is 7 V to 16 V. The input voltage monitoring circuit
monitors the voltage on the input voltage pin. When the input voltage drops to between 4.5 V
and 6.8 V, the NI roboRIO enters brownout mode with a staged response, as Table 2 describes.
Table 2. NI roboRIO Input Voltage Brownout Behavior
Input Voltage
Stage
Range
1 6.3 V to 6.8 V The +6 V voltage rail starts to drop.
2 4.5 V to 6.3 V The NI roboRIO enters a brownout fault condition and the
following precautions are taken:
• User voltage rails become disabled.
• All PWM generation stops at the conclusion of the current
cycle.
• GPIOs configured as outputs go to High-Z.
• Relay control outputs are driven low.
• CAN-based motor controllers become disabled.
Behavior
The following systems continue to function normally with
valid data and communication:
• FPGA, processor, RAM, disk, and user code
• USB power and communication
• Radio, if powered by USB
• Ethernet
•CAN
• AI and AO
2
C
•I
•SPI
• RS-232 serial
• LED and RSL status lights
Stage 2 continues until the input voltage rises to greater than
7.5 V or drops to less than 4.5 V.
3 Less than 4.5 V All controller functions cease and the controller state is lost.
This condition continues until the input voltage rises to greater
than 4.65 V, at which point the controller starts the normal
booting sequence. At startup, the controller remains in Stage 2
until the input voltage rises to greater than 7.5 V.
NI roboRIO User Manual | © National Instruments | 7
Page 8

Pinouts
AO0
AO1
AGND
DGND
UART.RX
DGND
UART.TX
DGND
DIO11 / PWM7
DGND
DIO12 / PWM8
DGND
DIO13 / PWM9
DGND
DGND
DIO14 / I2C SCL
DIO15 / I2C SDA
+5V
AI1
AI3
AI2
DIO1 / PWM1
DIO2 / PWM2
DIO3 / PWM3
DIO4 / SPICS
AI0
DIO0 / PWM0
DIO5 / SPI CLK
DIO6 / SPI MISO
DIO7 / SPI MOSI
DIO8 / PWM4
DIO9 / PWM5
DIO10 / PWM6
+3.3V
3433323130292827262524
23222120191817
1615141312111098
7
6
5
4
3
2
1
The following describe the pins and signals on the NI roboRIO ports.
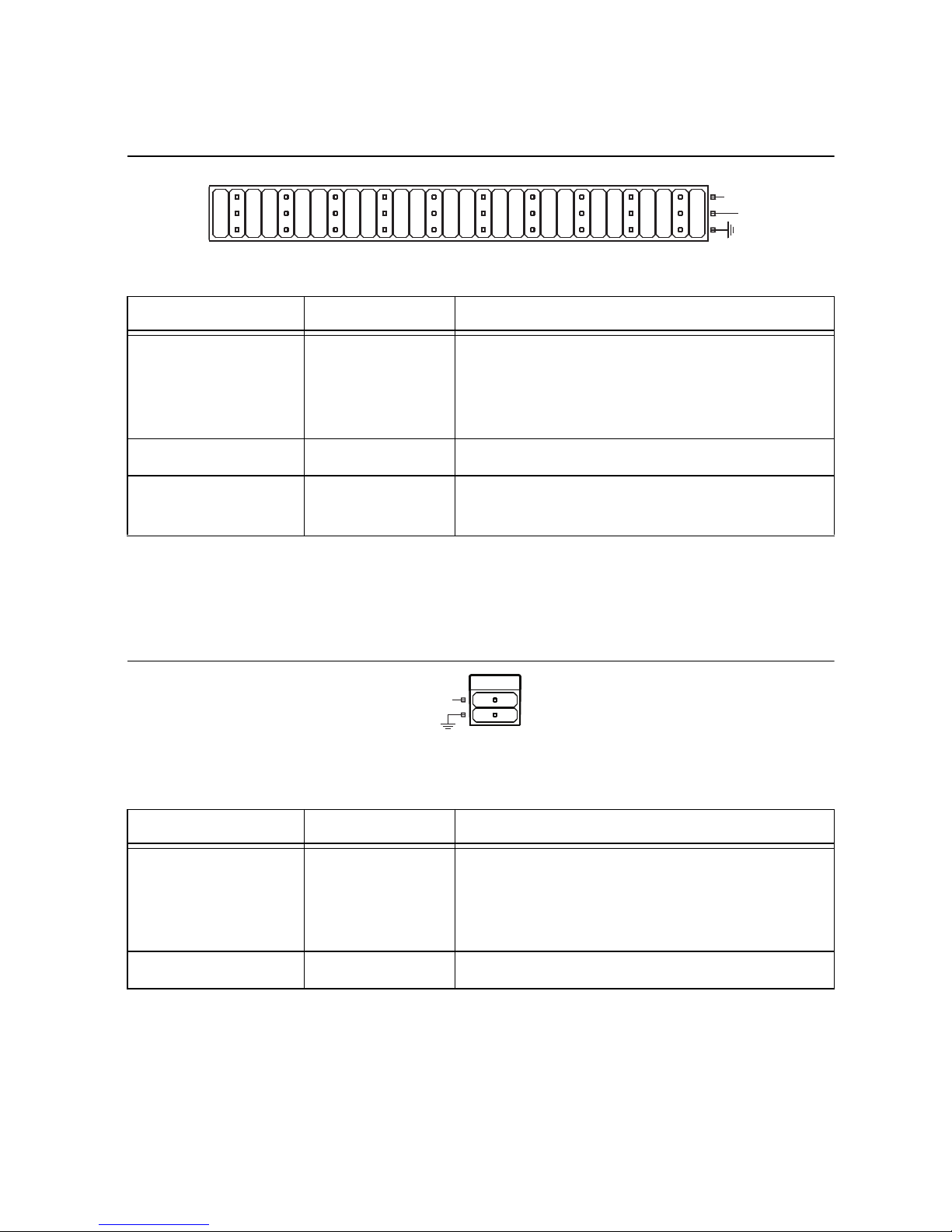
MXP
Figure 4 and Table 3 describe the MXP pins and signals. Note that some pins carry both primary
and secondary functions.
Figure 4. MXP Pinout
Signal Name Reference Direction Description
+5V DGND Output +5 V power output.
AI <0..3> AGND Input 0 to 5 V, referenced, single-ended AI
AO <0..1> AGND Output 0 to 5 V referenced, single-ended AO.
8 | ni.com | NI roboRIO User Manual
AGND — — Reference for AI and AO.
+3.3V DGND Output +3.3 V power output.
Table 3. MXP Signal Descriptions
channels. Refer to the AI Channels
section for more information.
Refer to the AO Channels section for
more information.
Page 9

Table 3. MXP Signal Descriptions (Continued)
Signal Name Reference Direction Description
DIO <0..15> DGND Input or
Output
General-purpose digital lines with
3.3 V output, 3.3 V/5 V-compatible
input. Refer to the DIO, PWM, and
Relay Lines section for more
information.
UART.RX DGND Input UART receive input. UART lines are
electrically identical to DIO lines.
UART.TX DGND Output UART transmit output. UART lines are
electrically identical to DIO lines.
DGND — — Reference for digital signals, +5 V,
and +3.3 V.
CAN Port
Figure 5 and Table 4 describe the CAN port pins and signals.
Figure 5. CAN Port Pinout
L (GRN)
H (YEL)
Table 4. CAN Port Signal Descriptions
Signal Name Direction Description
L (GRN) Input/Output CAN bus differential low signal.
H (YEL) Input/Output CAN bus differential high signal.
Note The NI roboRIO contains an internal 120 W termination resistor between
L (GRN) and H (YEL).
NI roboRIO User Manual | © National Instruments | 9
Page 10

I2C Port
RXD
TXD
Figure 6 and Table 5 describe the I2C port pins and signals.
Figure 6. I
Table 5. I
2
C Port Signal Descriptions
2
C Port Pinout
SDA
3.3V
SCL
Signal Name Direction Description
GND — Reference for digital lines and +3.3 V power
output.
3.3V Output +3.3 V power output.
SCL Input or Output I2C lines with 3.3 V output, 3.3 V/
5 V-compatible input. Refer to the I
SDA Input or Output
section for more information.
RS-232 Port
2
C Lines
Figure 7 and Table 6 describe the RS-232 port pins and signals.
Figure 7. RS-232 Serial Port Pinout
Table 6. RS-232 Serial Port Signal Descriptions
Signal Name Direction Description
TXD Output Serial transmit output with ±5 V to ±15 V signal
levels. Refer to the UART and RS-232 Lines
section for more information.
RXD Input Serial receive input with ±15 V input voltage
range. Refer to the UART and RS-232 Lines
section for more information.
GND — Reference for digital lines.
10 | ni.com | NI roboRIO User Manual
Page 11
DIO Port
1
2
3
5
6
7
4
8
0
9
S
5V
Figure 8 and Table 7 describe the DIO port pins and signals.
Figure 8. DIO Port Pinout
Table 7. DIO Port Signal Descriptions
Signal Name Direction Description
S (DIO) <0..9> Input/Output General-purpose digital lines with 3.3 V output,
3.3 V/5 V-compatible input. Refer to the DIO,
PWM, and Relay Lines section for more
information.
5V Output +5 V power output.
GND — Reference for digital lines and +5 V power
output.
RSL Port
Figure 9 and Table 8 describe the RSL port pins and signals.
Figure 9. RSL Port Pinout
S
Table 8. RSL Port Signal Descriptions
Signal Name Direction Description
S Output Switched power output to drive RSL when
RSLis enabled. The voltage level depends on the
connected input voltage. RSL current is limited
at 120 mA.
GND — Reference for S.
NI roboRIO User Manual | © National Instruments | 11
Page 12

Relay Port
S
5V
1
2
03
Figure 10 and Table 9 describe the Relay port pins and signals.
Figure 10. Relay Port Pinout
1
FWD
REV
2
30
Table 9. Relay Port Signal Descriptions
Signal Name Direction Description
FWD <0..3> Output Relay digital lines with 5 V output.
REV <0..3> Output Relay digital lines with 5 V output.
GND — Reference for digital lines.
AI Port
Figure 11 and Table 10 describe the AI port pins and signals.
Figure 11. AI Port Pinout
Table 10. AI Port Signal Descriptions
Signal Name Direction Description
S (AI) <0..3> Input 0 V to 5 V referenced, single-ended AI channels.
Refer to the AI Channels section for more
information.
5V Output +5 V power output.
GND — Reference for AI and +5 V power.
12 | ni.com | NI roboRIO User Manual
Page 13

PWM Port
Figure 12 and Table 11 describe the PWM port pins and signals.
Figure 12. PWM Port Pinout
6V
S
9
8
7
6
5
4
3
2
Table 11. PWM Port Signal Descriptions
Signal Name Direction Description
S (PWM) <0..9> Output PWM digital lines with 5 V output.
6V Output +6 V power output for servos only.
GND — Reference for digital lines and +6 V power
output.
SPI Port
Figure 13 and Table 12 describe the SPI port pins and signals.
Figure 13. SPI Port Pinout
1
0
CS0
SCLK
MOSI
MISO
3.3V
CS1
5V
CS2
CS3
Table 12. SPI Port Signal Descriptions
Signal Name Direction Description
3.3V Output +3.3 V power output.
5V Output +5 V power output.
CS <0..3> Output SPI with 3.3 V output, 3.3 V/5 V-compatible
input. Refer to the SPI Lines section for more
SCLK Output
information.
MOSI Output
MISO Input
GND — Reference for digital lines and +3.3 V and
+5.5 V power output.
NI roboRIO User Manual | © National Instruments | 13
Page 14
Signal Ground References
To minimize noise on analog measurement channels, use the ground reference of the
corresponding port. For example, when you are using AI, the measurement should reference the
GND of the AI port.
Interfaces
AI Channels
The NI roboRIO has AI channels on the MXP and on the AI port. The channels are multiplexed
to a single analog-to-digital converter (ADC) that samples all channels.
The MXP and the AI port each has four single-ended AI channels, AI0-AI3, which you can use
to measure 0-5 V signals.
Note For important information about improving measurement accuracy by
reducing noise, visit
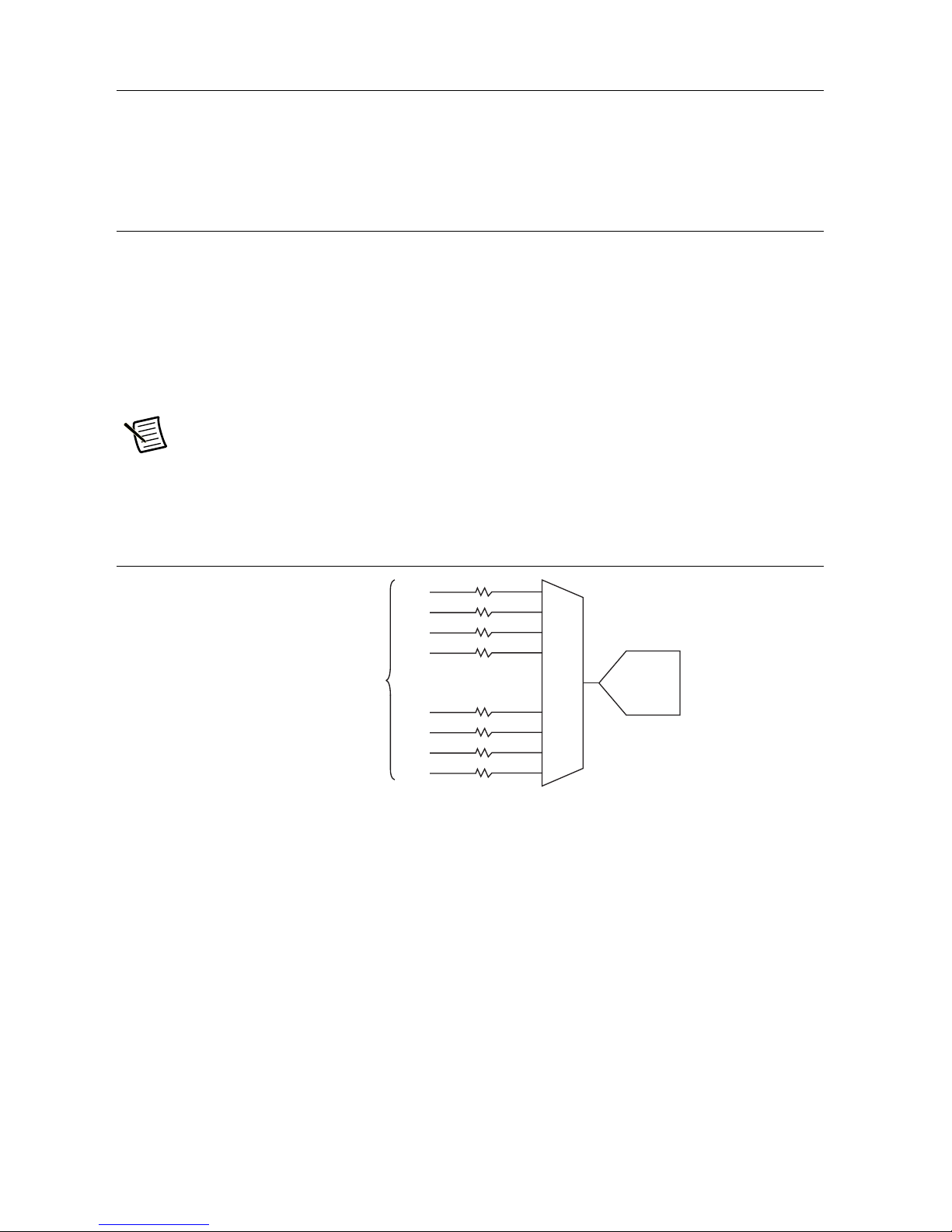
Figure 14 shows the AI topology of the NI roboRIO.
ni.com/info and enter the Info Code analogwiring.
Figure 14. NI roboRIO AI Circuitry
AI0
Expansion port
0–5 V
Integrated AI port
AI1
AI2
AI3
AI0
AI1
AI2
AI3
MUX
ADC
AO Channels
The NI roboRIO MXP has two AO channels, AO0 and AO1, which you can use to generate
signals of 0 V to 5 V. Each channel has a dedicated digital-to-analog converter (DAC), which
allows all AO channels to update simultaneously. The maximum update rate is specified as an
aggregate rate in the Analog Output section of the NI roboRIO Specifications.
Figure 15 shows the AO topology of the NI roboRIO.
14 | ni.com | NI roboRIO User Manual
Page 15
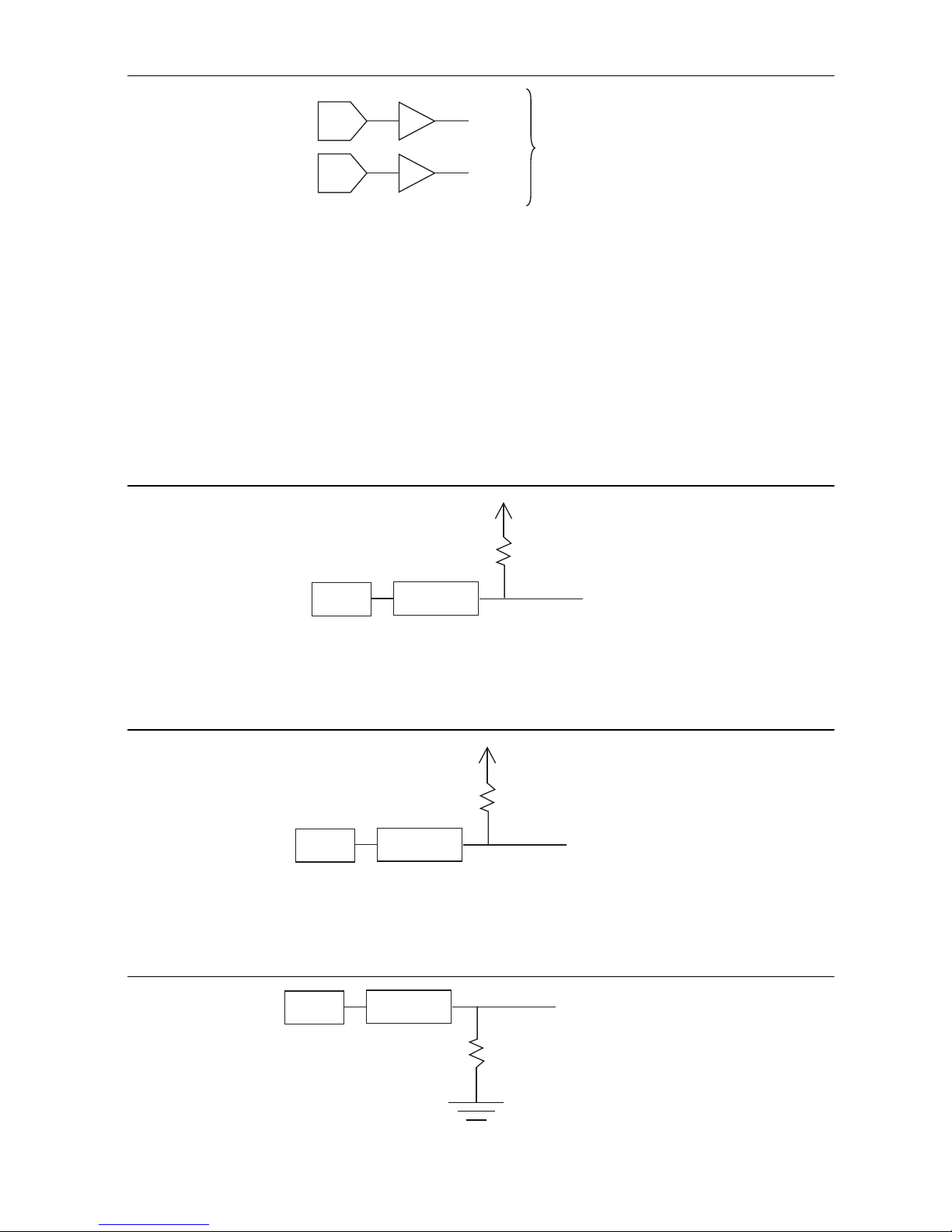
Figure 15. NI roboRIO AO Circuitry
40 kΩ
FPGA
Bus Switch
DIO/CS
+3.3 V
40 kΩ
FPGA
Bus Switch
DIO or Other Line
DAC
DAC
AO0
AO1
Expansion port
0–5 V
DIO, PWM, and Relay Lines
The NI roboRIO provides the following DIO lines:
• 3.3 V general-purpose DIO lines on the MXP
• 3.3 V digital lines on the DIO, I
• 5 V digital lines on the PWM and Relay ports.
DIO <9..0> on the DIO port, CS <3..0> on the SPI port, and DIO <13..0> on the MXP all have
40 kΩ pullup resistors to 3.3 V, as shown in Figure 16.
Figure 16. DIO Lines with 40 kΩ Pullup Resistors to 3.3 V
2
C, and SPI ports
DIO <15..14> on the MXP and the two lines on the I2C port all have 2.2 kΩ pullup resistors to
3.3 V, as shown in Figure 17.
Figure 17. DIO Lines with 2.2 kΩ Pullup Resistors to 3.3 V
+3.3 V
2.2 kΩ
FPGA
Bus Switch
DIO/SCL/SDA
<SCLK, MOSI, MISO> on the SPI port and the lines on the PWM and Relay ports all have
40 kΩ pulldown resistors to ground, as shown in Figure 18.
Figure 18. DIO Lines with 40 kΩ Pulldown Resistors to Ground
NI roboRIO User Manual | © National Instruments | 15
Page 16

You can program all MXP DIO lines and on-board DIO lines individually as inputs or outputs.
2
Secondary digital functions include SPI, I
NI roboRIO software documentation for information about configuring the behavior of the DIO
lines.
When a DIO line is floating, it floats in the direction of the pull resistor. A DIO line may be
floating in any of the following conditions:
• When the NI roboRIO device is starting up
• When the line is configured as an input
• When the NI roboRIO device is powering down
You can add a stronger resistor to a DIO line to cause it to float in the opposite direction.
C, PWM, and quadrature encoder input. Refer to the
UART and RS-232 Lines
The NI roboRIO has one UART connected to the UART lines on the MXP and one UART
connected to the RS-232 port.
The UART lines on the MXP are electrically identical to DIO lines 0 to 13 on the MXP. Like
those lines, UART.RX and UART.TX have 40 kΩ pullup resistors to 3.3 V.
The RS-232 lines are compliant with TIA/EIA-232-F voltage levels.
SPI Lines
The SPI port can support up to four devices by using each of the four Chip Select (CS) lines.
I2C Lines
The I2C lines can be used to connect to a network of I2C slave devices..
USB Device Port
You can deploy and debug code by connecting a USB cable from the USB device port on the
NI roboRIO to a computer.
USB Host Port
The NI roboRIO USB host port supports the following devices:
• Web cameras that conform to the USB Video Device Class (UVC) protocol.
• Machine vision cameras that conform to the USB3 Vision standard and are backward
compatible with the USB 2.0 specification.
• Basler ace USB3 cameras.
• USB Flash drives.
• USB-to-IDE adapters formatted with FAT16 and FAT32 file systems.
LabVIEW usually maps USB devices to the
if it is available.
16 | ni.com | NI roboRIO User Manual
/U, /V, /W, or /X drive, starting with the /U drive
Page 17

Accelerometer
The NI roboRIO contains a three-axis accelerometer, MMA8452Q. Refer to the Accelerometer
section of the NI roboRIO Specifications for the accelerometer sample rates.
Converting Raw Data Values to Voltage
You can use the following equations to convert raw data values to volts:
V = Raw Data Value * LSB Weight
LSB Weight = Nominal Range ÷ 2
where Raw Data Value is the value returned by reading in the input channel,
LSB Weight is the value in volts of the increment between data values,
Nominal Range is the absolute value in volts of the full, peak-to-peak nominal range
of the channel,
and ADC Resolution is the resolution of the ADC in bits. (ADC Resolution = 12.)
• For AI and AO channels on the MXP,
LSB Weight = 5 V ÷ 2
Maximum reading = 4095 * 1.221 mV = 4.999 V
• For the accelerometer,
LSB Weight = 16 g ÷ 2
Maximum Positive Reading = +2047 * 3.906 mg = +7.996 g
Maximum Negative Reading = -2048 * 3.906 mg = -8.000 g
12
12
ADC Resolution
= 1.221 mV
= 3.906 mg
Front Panel Buttons
Reset Button
Pressing and releasing the Reset button restarts the processor and the FPGA.
Pressing and holding the Reset button until the status LED lights (about five seconds) and then
releasing the Reset button restarts the processor and the FPGA and forces the NI roboRIO into
safe mode. In safe mode, the NI roboRIO launches only the services necessary for updating
configuration and installing software.
When the NI roboRIO is in safe mode, you can communicate with it by using the serial lines on
the RS-232 serial port. You must configure your serial-port terminal program with the following
settings:
• 115,200 bits per second
• Eight data bits
NI roboRIO User Manual | © National Instruments | 17
Page 18

• No parity
• One stop bit
• No flow control
User Button
The User Button produces a logic TRUE when depressed and a logic FALSE when not
depressed. The User Button is not debounced in hardware.
LED Indications
Power LED
The Power LED is a tri-color red/green/yellow LED that indicates specific conditions, as shown
in Table 13.
Table 13. Power LED Indications
Color State Indication
Off Off Power is outside valid input range.
Green Solid Power is valid with no fault condition.
Red Solid Fault condition detected. One or more user voltage rails are
in short-circuit or overcurrent condition.
Red Flashing The input voltage is too high (greater than 16 V) and all
outputs, including the RSL output, are disabled.
Ye ll o w Solid Brownout condition detected. The 6 V user rail and
outputs are disabled.
18 | ni.com | NI roboRIO User Manual
Page 19

Status LED
The Status LED is a single-color yellow LED. The Status LED is off during normal operation.
The NI roboRIO runs a power-on self test (POST) when you apply power to the device. During
the POST, the Power and Status LEDs turn on. When the Status LED turns off, the POST is
complete. The NI roboRIO indicates specific error conditions by flashing the Status LED a
certain number of times every few seconds, as shown in Table 14.
Table 14. Status LED Indications
Number of Flashes
Every Few Seconds
2 The device has detected an error in its software. This usually
occurs when an attempt to upgrade the software is interrupted.
Reinstall software on the device.
3 The device is in safe mode.
4 The software has crashed twice without rebooting or cycling
power between crashes. This usually occurs when the device runs
out of memory. Review your RT VI and check the memory usage.
Modify the VI as necessary to solve the memory usage issue.
Indication
Continuously flashing
or solid
The device has detected an unrecoverable error. Contact National
Instruments.
Radio LED
The Radio LED is a tri-color red/green/yellow LED that indicates specific conditions for an
USB-connected radio, as shown in Table 15.
Table 15. Radio LED Indications
Color State Indication
Off Off No connection detected.
Ye ll o w Blinking Booting as access point. Radio is enabled and access point
is being constructed.
Ye ll o w Solid Access point active. Radio is enabled and in access point
mode.
Green Blinking Booting as bridge. Radio is enabled and bridging is in
progress.
Green Solid Bridge active. Radio is enabled and has bridge configured
Red Any Reserved.
with SSID settings.
NI roboRIO User Manual | © National Instruments | 19
Page 20

Other LED states may indicate other, undetermined radio issues or failures. This LED is
undefined if a USB radio is not used.
Comm LED
The Comm LED is a tri-color red/green/yellow LED that indicates robot communication
conditions, as shown in Table 16.
Table 16. Comm LED Indications
Color State Indication
Off Off No communication detected. No heartbeat detected.
Red Solid No code. The protocol indicates that no user code has been
loaded.
Red Blinking E-Stop. The protocol indicates that the driver station has
E-Stopped the robot.
Green Solid Active. The protocol is active and the driver station is in
control of the robot.
Ye ll o w Any Reserved.
Mode LED
The Mode LED is a tri-color red/green/yellow LED that indicates the mode of the NI roboRIO
outputs, as shown in Table 17.
Table 17. Mode LED Indications
Color State Indication
Off Off Outputs disabled.
Green Solid Outputs enabled. Autonomous mode.
Ye ll o w Solid Outputs enabled. TeleOperated mode.
Red Solid Outputs unknown, undetermined, or in test mode.
20 | ni.com | NI roboRIO User Manual
Page 21

RSL (Safety) LED
The RSL LED is a single-color yellow LED that functions identically to the RSL, which is an
external indicator connected to the NI roboRIO using a dedicated connector, and indicates
specific conditions, as shown in Table 18.
Table 18. RSL LED Indications
Color State Indication
Off Off Outputs disabled. No power.
Ye ll o w Solid Outputs disabled. Robot is powered.
Ye ll o w Blinking Outputs enabled. Robot is powered.
NI roboRIO User Manual | © National Instruments | 21
Page 22

Physical Dimensions
NI roboRIO
PO
W
E
R
STAT
US
R
ADIO
SPI
C
S0
C
S1
5V
CS2
CS3
SCLK
MOSI
CAN
L (GR
N)
H (YE
L)
I
2
C
SC
L
3.3
V SDA
RS-
232
TXD
RX
D
R
S
L
MISO
3.3
V
CO
M
M
M
O
D
E
RSL
RELAY
0 1
FWD
5V
S
S
REV
2 3 0 1
1
33
2 3
3
2 1
0
79 8 6 5
4
4 5 6
7 8 9
0 1
2
3
ANALOG IN
RESET
ACCELEROMETER
PWM
DIO
Y
Z
X
USER
S
5V
S
6V
INPUT
7-16V
45W
M
A
X
Figures 19 through 22 describe the physical dimensions of the NI roboRIO enclosure and its
features.
Figure 19. NI roboRIO Dimensions, Primary Side
135.47 mm (5.333 in.)
132.61 mm (5.221 in.)
130.72 mm (5.147 in.)
123.43 mm (4.860 in.)
110.96 mm (4.368 in.)
99.54 mm (3.919 in.)
88.10 mm (3.469 in.)
80.48 mm (3.169 in.)
72.86 mm (2.869 in.)
65.24 mm (2.569 in.)
57.62 mm (2.269 in.)
50.00 mm (1.969 in.)
42.38 mm (1.669 in.)
34.76 mm (1.369 in.)
27.14 mm (1.069 in.)
19.52 mm (0.769 in.)
8.42 mm (0.332 in.)
7.16 mm (0.282 in.)
0.0 mm (0 in.)
8.93 mm (0.352 in.)
8.44 mm (0.332 in.)
INPUT
7-16 V
45W MAX
CAN
L (GRN)
H (YEL)
RS-232
DIO
5V
29.58 mm (1.164 in.)
9.71 mm (0.382 in.)
3.3V SDA
SCL
TXD
RXD
SL
R
FWD
REV
49.45 mm (1.947 in.)
74.55 mm (2.935 in.)
NI roboRIO
33
RELAY
ANALOG IN
94.67 mm (3.727 in.)
CLK
S
MOSI
MISO
3.3V
ACCELEROMETER
5V
116.64 mm (4.592 in.)
R
E
POW
STATUS
SPI
RADIO
COMM
S0
C
S1
C
MODE
5V
S2
C
CS3
RSL
PWM
RESET
USER
6V
129.83 mm (5.111 in.)
129.21 mm (5.087 in.)
126.94 mm (4.998 in.)
88.50 mm (3.484 in.)
80.88 mm (3.184 in.)
74.70 mm (2.941 in.)
65.64 mm (2.584 in.)
58.02 mm (2.284 in.)
54.40 mm (1.984 in.)
42.78 mm (1.684 in.)
42.58 mm (1.677 in.)
35.16 mm (1.384 in.)
27.54 mm (1.084 in.)
19.92 mm (0.784 in.)
8.09 mm (0.319 in.)
0.0 mm (0 in.)
8.44 mm (0.332 in.)
22 | ni.com | NI roboRIO User Manual
22.26 mm (0.876 in.)
60.38 mm (2.377 in.)
52.76 mm (2.077 in.)
45.14 mm (1.777 in.)
93.39 mm (3.677 in.)
85.77 mm (3.377 in.)
78.15 mm (3.077 in.)
73.08 mm (2.877 in.)
68.00 mm (2.677 in.)
101.01 mm (3.977 in.)
117.85 mm (4.64 in.)
137.72 mm (5.422 in.)
128.01 mm (5.040 in.)
Page 23

Figure 20. NI roboRIO Dimensions, Primary Side LEDs
NI roboRIONI roboRIO
POW
E
RPOWER
STATUSSTAT
US
RADIORAD
IO
SPISPI
CS0CS0
CS1C
S1
5V5V
CS2C
S2
CS3CS3
S
CLK
S
CLK
MOSIMOSI
CANCAN
L (GRN)L (GRN)
H (YEL)H (YE
L)
I
2
C
SCLSC
L
3.3V SDA3.3V SD
A
RS-232RS-
232
TXDTXD
RXDRX
D
RSLR
S
L
MISOMISO
3.3V3.3
V
COMMCO
M
M
MODEMO
D
E
RSLR
S
L
RELAYRELAY
0 1
FWDFWD
S
S
REVREV
2 3 0 1
133
33
2 3
3
2 1
0
79 8
6 5
4
4 5 6
7 8 9
0 1
2
3
ANALOG INANALOG IN
RESETRESET
ACCELEROMETERACCELEROMETER
PWMPWM
DIODIO
Y
Z
X
USERUSER
S
S
5V5V
5V5V
6V6V
INPUTINPUT
7-16 V7-16V
45W MAX45
W MA
X
146.15 mm (5.754 in.)
0.0 mm (0 in.)
0.0 mm (0 in.)
143.18 mm (5.637 in.)
128.51 mm (5.059 in.)
143.68 (5.657 in.)
123.51 mm (4.862 in.)
116.01 mm (4.567 in.)
111.01 mm (4.370 in.)
106.01 mm (4.173 in.)
98.51 mm (3.878 in.)
NI roboRIO User Manual | © National Instruments | 23
Page 24

Figure 21. NI roboRIO Dimensions, Secondary Side
22.28 mm (0.877 in.)
0.0 mm (0 in.)
122.39 mm (4.819 in.)
20.79 mm (0.819 in.)
135.09 mm (5.319 in.)
8.09 mm (0.319 in.)
0.0 mm (0 in.)
3.84 mm (0.151 in.)
142.31 mm (5.603 in.)
4-40 Screw Insert
24 | ni.com | NI roboRIO User Manual
Page 25

20.91 mm (0.823 in.)
Figure 22. NI roboRIO Dimensions, Side
34.43 mm (1.355 in.)
32.19 mm (1.267a in.)
22.76 mm (0.
896 in.)
6.03 mm (0.238 in.)
0.0 mm (0 in.)
0.0 mm (0 in.)
20.79 mm (0.819 in.)
13.59 mm (0.535 in.)
129.59 mm (5.102 in.)
122.39 mm (4.819 in.)
5.71 mm (0.225 in.)
Mounting the NI roboRIO
You can mount the NI roboRIO in the following ways:
• Using cable ties to secure one edge of the NI roboRIO to perfboard with 6.35 mm (0.25 in.)
diameter holes on 12.7 mm (0.5 in.) straight centers, such as AndyMark part number
am-0836.
• Using cable ties to secure one corner of the NI roboRIO to perfboard.
• Using screws to secure the bottom of the NI roboRIO to a metal plate.
Method One: Using Cable Ties to Secure One Edge of
the NI roboRIO to Perfboard
Figures 23 through 26 show how to secure one edge of the NI roboRIO to perfboard.
Figure 23. Cable Ties, Method One, Step One
NI roboRIO User Manual | © National Instruments | 25
Page 26
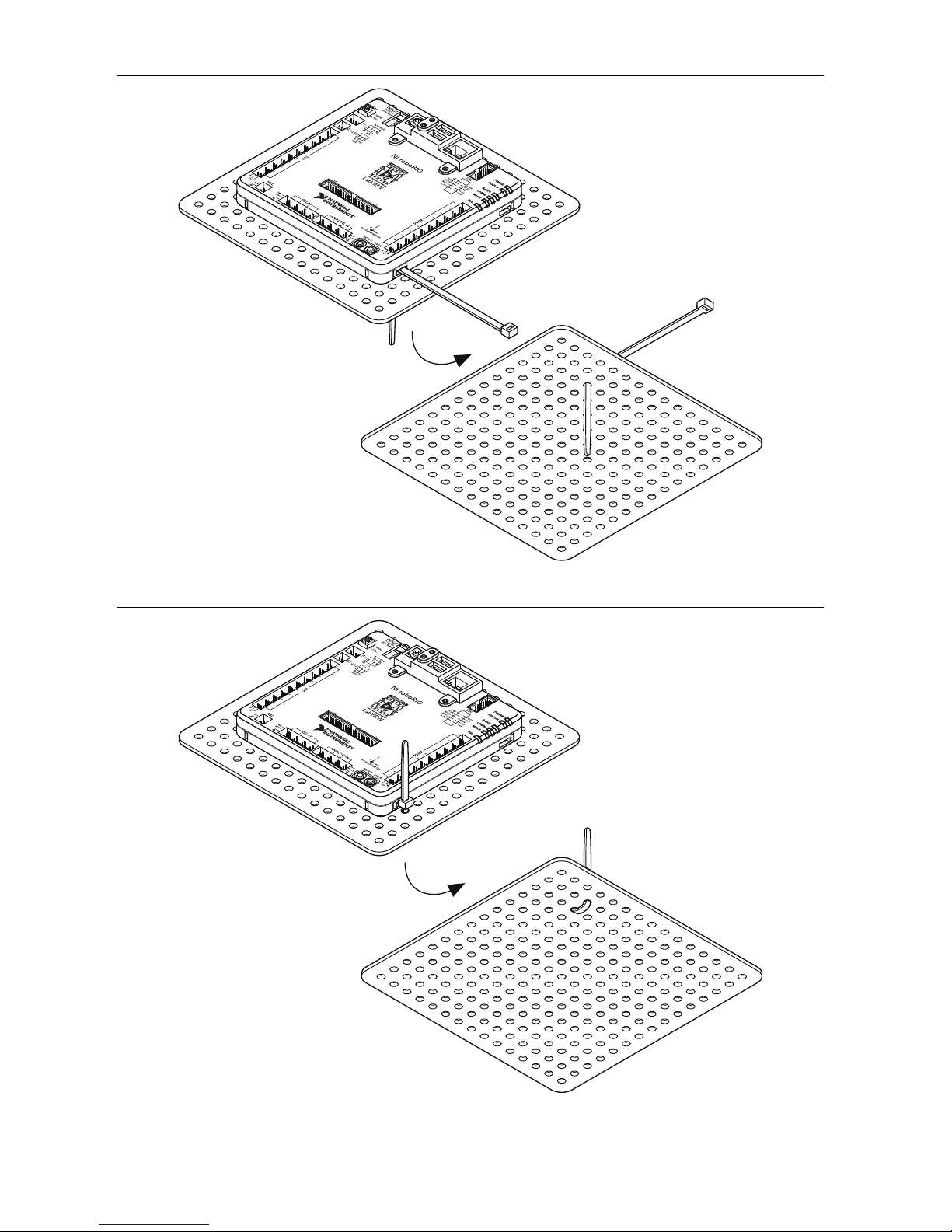
Figure 24. Cable Ties, Method One, Step Two
Figure 25. Cable Ties, Method One, Step Three
26 | ni.com | NI roboRIO User Manual
Page 27
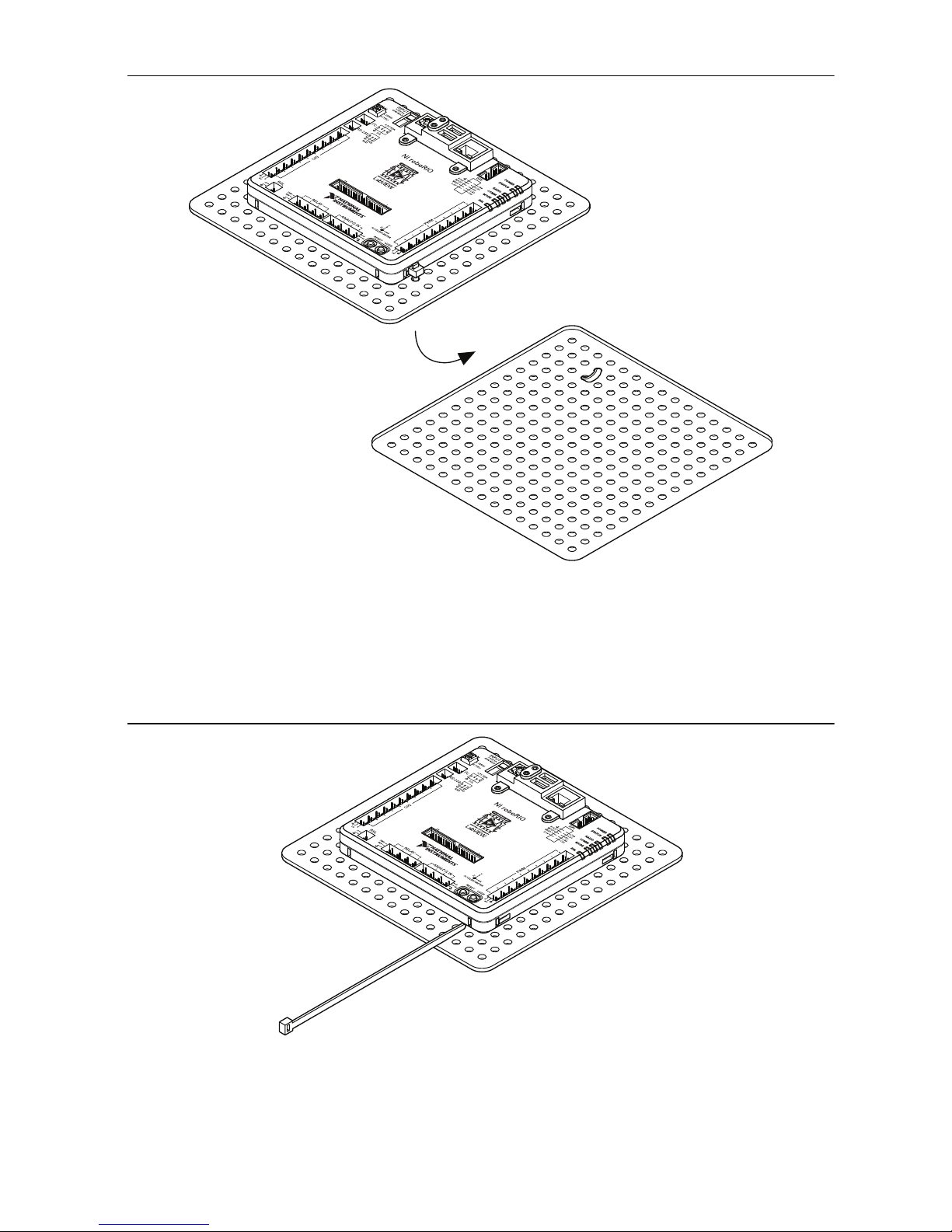
Figure 26. Cable Ties, Method One, Step Four
Method Two: Using Cable Ties to Secure One Corner of
the NI roboRIO to Perfboard
Figures 27 through 31 show how to secure one corner of the NI roboRIO to perfboard.
Figure 27. Cable Ties, Method Two, Step One
NI roboRIO User Manual | © National Instruments | 27
Page 28

Figure 28. Cable Ties, Method Two, Step Two
Figure 29. Cable Ties, Method Two, Step Three
28 | ni.com | NI roboRIO User Manual
Page 29
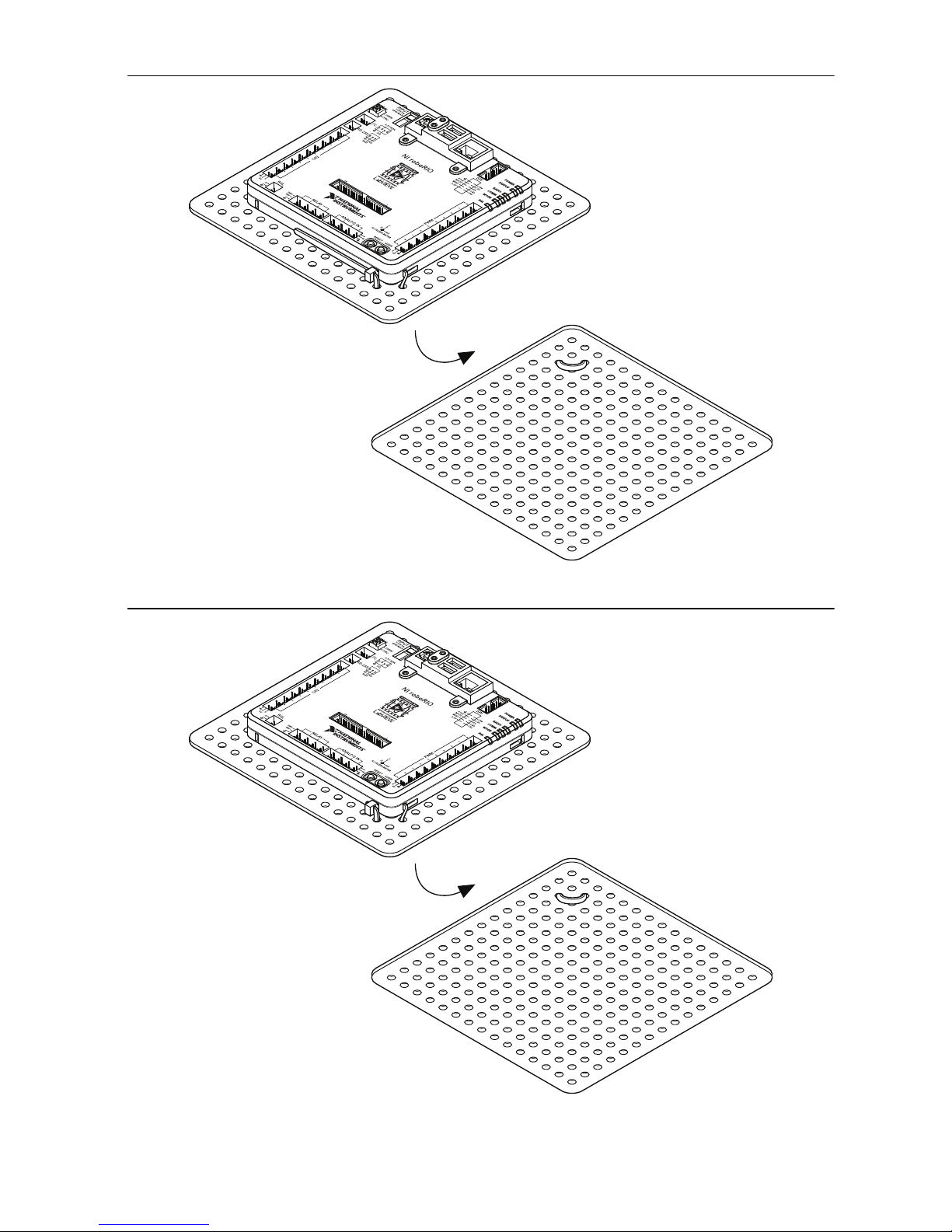
Figure 30. Cable Ties, Method Two, Step Four
Figure 31. Cable Ties, Method Two, Step Five
NI roboRIO User Manual | © National Instruments | 29
Page 30

Method Three: Using Screws to Secure the Bottom of
2
1
the NI roboRIO to a Metal Plate
Figure 32 shows how to secure the bottom of the NI roboRIO to a metal plate using the built-in
4-40 screw holes. The length of the screws required depends on the thickness of the plate you
use. For example, if the plate is 4.76 mm (0.188 in.) thick, the recommended screw length is
7.94 mm (0.313 in.).
Figure 32. Mounting NI roboRIO Using Screws
1 Metal Mounting Plate 2 4-40 Screws x 4
Compatible USB and Ethernet Cables
Table 19 lists the USB and Ethernet cables available from NI that you can use with the
NI roboRIO.
Table 19. Compatible USB and Ethernet Cables Available from NI
Cable Description NI Part Number
USB cable USB 2.0 A/B, black, 2 m 192256A-01
Peripheral USB cable USB 2.0 A/A, locking, black, 2 m 152166A-01
Ethernet cable CAT-5E, thin profile, 2 m 151733A-01
30 | ni.com | NI roboRIO User Manual
Page 31
Warranty
For customers other than private individual users in the EU: The NI roboRIO is warranted
against defects in materials and workmanship for a period of three years from the date of
shipment, as evidenced by receipts or other documentation. National Instruments will, at its
option, repair or replace equipment that proves to be defective during the warranty period. This
warranty includes parts and labor.
For private individual users in the EU: Based on your statutory rights, National Instruments
will—through its distributor—cure defects in materials and workmanship within two years from
delivery.
Worldwide Support and Services
The National Instruments website is your complete resource for technical support. At ni.com/
support
self-help resources to email and phone assistance from NI Application Engineers.
Visit
other services.
you have access to everything from troubleshooting and application development
ni.com/services for NI Factory Installation Services, repairs, extended warranty, and
Visit ni.com/register to register your National Instruments product. Product registration
facilitates technical support and ensures that you receive important information updates from NI.
A Declaration of Conformity (DoC) is our claim of compliance with the Council of the European
Communities using the manufacturer’s declaration of conformity. This system affords the user
protection for electromagnetic compatibility (EMC) and product safety. You can obtain the DoC
for your product by visiting
you can obtain the calibration certificate for your product at
ni.com/certification. If your product supports calibration,
ni.com/calibration.
National Instruments corporate headquarters is located at 11500 North Mopac Expressway,
Austin, Texas, 78759-3504. National Instruments also has offices located around the world. For
telephone support in the United States, create your service request at
ni.com/support or dial
1 866 ASK MYNI (275 6964). For telephone support outside the United States, visit the
Worldwide Offices section of
ni.com/niglobal to access the branch office websites, which
provide up-to-date contact information, support phone numbers, email addresses, and current
events.
Refer to the NI Trademarks and Logo Guidelines at ni.com/trademarks for more information on National Instruments trademarks. Other
product and company names mentioned herein are trademarks or trade names of their respective companies. For patents covering National
Instruments products/technology, refer to the appropriate location: Help»Patents in your software, the patents.txt file on your media, or the
National Instruments Patents Notice at ni.com/patents. You can find information about end-user license agreements (EULAs) and third-party
legal notices in the readme file for your NI product. Refer to the Export Compliance Information at ni.com/legal/export-compliance
for the National Instruments global trade compliance policy and how to obtain relevant HTS codes, ECCNs, and other import/export data. NI MAKES
NO EXPRESS OR IMPLIED WARRANTIES AS TO THE ACCURACY OF THE INFORMATION CONTAINED HEREIN AND SHALL NOT BE LIABLE FOR
ANY ERRORS. U.S. Government Customers: The data contained in this manual was developed at private expense and is subject to the applicable
limited rights and restricted data rights as set forth in FAR 52.227-14, DFAR 252.227-7014, and DFAR 252.227-7015.
© 2014 National Instruments. All rights reserved.
374474A-01 Oct14
 Loading...
Loading...