

Page 1

DAQ M Series
NI 6232/6233 User Manual
NI 6232/6233 User Manual
July 2006
371995A-01
Page 2

Support
Worldwide Technical Support and Product Information
ni.com
National Instruments Corporate Headquarters
11500 North Mopac Expressway Austin, Texas 78759-3504 USA Tel: 512 683 0100
Worldwide Offices
Australia 1800 300 800, Austria 43 0 662 45 79 90 0, Belgium 32 0 2 757 00 20, Brazil 55 11 3262 3599,
Canada 800 433 3488, China 86 21 6555 7838, Czech Republic 420 224 235 774, Denmark 45 45 76 26 00,
Finland 385 0 9 725 725 11, France 33 0 1 48 14 24 24, Germany 49 0 89 741 31 30, India 91 80 41190000,
Israel 972 0 3 6393737, Italy 39 02 413091, Japan 81 3 5472 2970, Korea 82 02 3451 3400,
Lebanon 961 0 1 33 28 28, Malaysia 1800 887710, Mexico 01 800 010 0793, Netherlands 31 0 348 433 466,
New Zealand 0800 553 322, Norway 47 0 66 90 76 60, Poland 48 22 3390150, Portugal 351 210 311 210,
Russia 7 095 783 68 51, Singapore 1800 226 5886, Slovenia 386 3 425 4200, South Africa 27 0 11 805 8197,
Spain 34 91 640 0085, Sweden 46 0 8 587 895 00, Switzerland 41 56 200 51 51, Taiwan 886 02 2377 2222,
Thailand 662 278 6777, United Kingdom 44 0 1635 523545
For further support information, refer to the Technical Support and Professional Services appendix. To comment
on National Instruments documentation, refer to the National Instruments Web site at
the info code
feedback.
ni.com/info and enter
© 2006 National Instruments Corporation. All rights reserved.
Page 3

Important Information
Warranty
The NI 6232/6233 is warranted against defects in materials and workmanship for a period of three years from the date of shipment, as evidenced
by receipts or other documentation. National Instruments will, at its option, repair or replace equipment that proves to be defective during the
warranty period. This warranty includes parts and labor.
The media on which you receive National Instruments software are warranted not to fail to execute programming instructions, due to defects in
materials and workmanship, for a period of 90 days from date of shipment, as evidenced by receipts or other documentation. National Instruments
will, at its option, repair or replace software media that do not execute programming instruc tions if National Instruments receives notice of such defects
during the warranty period. National Instruments does not warrant that the operation of the software shall be uninterrupted or error free.
A Return Material Authorization (RMA) number must be obtained from the factory and clearly marked on the outside of the package before any
equipment will be accepted for warranty work. National Instruments will pay the shipping costs of returning to the owner parts which are covered by
warranty.
National Instruments believes that the information in this document is accurate. The document has been carefully reviewed for technical accuracy. In
the event that technical or typographical errors exist, National Instruments reserves the right to make changes to subsequent editions of this document
without prior notice to holders of this edition. The reader should consult National Instruments if errors are suspected. In no event shall National
Instruments be liable for any damages arising out of or related to this document or the information contained in it.
E
XCEPT AS SPECIFIED HEREIN, NATIONAL INSTRUMENTS MAKES NO WARRANTIES, EXPRESS OR IMPLIED, AND SPECIFICALLY DISCLAIMS ANY WARRANTY OF
MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE. CUSTOMER’S RIGHT TO RECOVER DAMAGES CAUSED BY FAULT OR NEGLIGENCE ON THE PART OF NATIONAL
I
NSTRUMENTS SHALL BE LIMITED TO THE AMOUNT THERETOFORE PAID BY THE CUSTOMER. NATIONAL INSTRUMENTS WILL NOT BE LIABLE FOR DAMAGES RESULTING
FROM LOSS OF DATA, PROFITS, USE OF PRODUCTS, OR INCIDENTAL OR CONSEQUENTIAL DAMAGES, EVEN IF ADVISED OF THE POSSIBILITY THEREOF. This limitation of
the liability of National Instruments will apply regardless of the form of action, whether in contract or tort, including negligence. Any action against
National Instruments must be brought within one year after the cause of action accrues. National Instruments shall not be liable for any delay in
performance due to causes beyond its reasonable control. The warranty provided herein does not cover damages, defects, malfunctions, or service
failures caused by owner’s failure to follow the National Instruments installation, operation, or maintenance instructions; owner’s modification of the
product; owner’s abuse, misuse, or negligent acts; and power failure or surges, fire, flood, accident, actions of third parties, or other events outside
reasonable control.
Copyright
Under the copyright laws, this publication may not be reproduced or transmitted in any form, electronic or mechanical, including photocopying,
recording, storing in an information retrieval system, or translating, in whole or in part, without the prior written consent of National
Instruments Corporation.
National Instruments respects the intellectual property of others, and we ask our users to do the same. NI software is protected by copyright and other
intellectual property laws. Where NI software may be used to reproduce software or other materials belonging to others, you may use NI software only
to reproduce materials that you may reproduce in accordance with the terms of any applicable license or other legal restriction.
Trademarks
National Instruments, NI, ni.com, and LabVIEW are trademarks of National Instruments Corporation. Refer to the Terms of Use section
on
ni.com/legal for more information about National Instruments trademarks.
®
is the registered trademark of Apple Computer, Inc. Other product and company names mentioned herein are trademarks or trade names
FireWire
of their respective companies.
Members of the National Instruments Alliance Partner Program are business entities independent from National Instruments and have no agency,
partnership, or joint-venture relationship with National Instruments.
Patents
For patents covering National Instruments products, refer to the appropriate location: Help»Patents in your software, the patents.txt file
on your CD, or
ni.com/patents.
WARNING REGARDING USE OF NATIONAL INSTRUMENTS PRODUCTS
(1) NATIONAL INSTRUMENTS PRODUCTS ARE NOT DESIGNED WITH COMPONENTS AND TESTING FOR A LEVEL OF
RELIABILITY SUITABLE FOR USE IN OR IN CONNECTION WITH SURGICAL IMPLANTS OR AS CRITICAL COMPONENTS IN
ANY LIFE SUPPORT SYSTEMS WHOSE FAILURE TO PERFORM CAN REASONABLY BE EXPECTED TO CAUSE SIGNIFICANT
INJURY TO A HUMAN.
(2) IN ANY APPLICATION, INCLUDING THE ABOVE, RELIABILITY OF OPERATION OF THE SOFTWARE PRODUCTS CAN BE
IMPAIRED BY ADVERSE FACTORS, INCLUDING BUT NOT LIMITED TO FLUCTUATIONS IN ELECTRICAL POWER SUPPLY,
COMPUTER HARDWARE MALFUNCTIONS, COMPUTER OPERATING SYSTEM SOFTWARE FITNESS, FITNESS OF COMPILERS
AND DEVELOPMENT SOFTWARE USED TO DEVELOP AN APPLICATION, INSTALLATION ERRORS, SOFTWARE AND HARDWARE
COMPATIBILITY PROBLEMS, MALFUNCTIONS OR FAILURES OF ELECTRONIC MONITORING OR CONTROL DEVICES,
TRANSIENT FAILURES OF ELECTRONIC SYSTEMS (HARDWARE AND/OR SOFTWARE), UNANTICIPATED USES OR MISUSES, OR
ERRORS ON THE PART OF THE USER OR APPLICATIONS DESIGNER (ADVERSE FACTORS SUCH AS THESE ARE HEREAFTER
COLLECTIVELY TERMED “SYSTEM FAILURES”). ANY APPLICATION WHERE A SYSTEM FAILURE WOULD CREATE A RISK OF
HARM TO PROPERTY OR PERSONS (INCLUDING THE RISK OF BODILY INJURY AND DEATH) SHOULD NOT BE RELIANT SOLELY
UPON ONE FORM OF ELECTRONIC SYSTEM DUE TO THE RISK OF SYSTEM FAILURE. TO AVOID DAMAGE, INJURY, OR DEATH,
THE USER OR APPLICATION DESIGNER MUST TAKE REASONABLY PRUDENT STEPS TO PROTECT AGAINST SYSTEM FAILURES,
INCLUDING BUT NOT LIMITED TO BACK-UP OR SHUT DOWN MECHANISMS. BECAUSE EACH END-USER SYSTEM IS
CUSTOMIZED AND DIFFERS FROM NATIONAL INSTRUMENTS' TESTING PLATFORMS AND BECAUSE A USER OR APPLICATION
DESIGNER MAY USE NATIONAL INSTRUMENTS PRODUCTS IN COMBINATION WITH OTHER PRODUCTS IN A MANNER NOT
EVALUATED OR CONTEMPLATED BY NATIONAL INSTRUMENTS, THE USER OR APPLICATION DESIGNER IS ULTIMATELY
RESPONSIBLE FOR VERIFYING AND VALIDATING THE SUITABILITY OF NATIONAL INSTRUMENTS PRODUCTS WHENEVER
Page 4

NATIONAL INSTRUMENTS PRODUCTS ARE INCORPORATED IN A SYSTEM OR APPLICATION, INCLUDING, WITHOUT
LIMITATION, THE APPROPRIATE DESIGN, PROCESS AND SAFETY LEVEL OF SUCH SYSTEM OR APPLICATION.
Page 5

Compliance
Compliance with FCC/Canada Radio Frequency Interference
Regulations
Determining FCC Class
The Federal Communications Commission (FCC) has rules to protect wireless communications from interference. The FCC
places digital electronics into two classes. These classes are known as Class A (for use in industrial-commercial locations only)
or Class B (for use in residential or commercial locations). All National Instruments (NI) products are FCC Class A products.
Depending on where it is operated, this Class A product could be subject to restrictions in the FCC rules. (In Canada, the
Department of Communications (DOC), of Industry Canada, regulates wireless interference in much the same way.) Digital
electronics emit weak signals during normal operation that can affect radio, television, or other wireless products.
All Class A products display a simple warning statement of one paragraph in length regarding interference and undesired
operation. The FCC rules have restrictions regarding the locations where FCC Class A products can be operated.
Consult the FCC Web site at
FCC/DOC Warnings
This equipment generates and uses radio frequency energy and, if not installed and used in strict accordance with the instructions
in this manual and the CE marking Declaration of Conformity*, may cause interference to radio and television reception.
Classification requirements are the same for the Federal Communications Commission (FCC) and the Canadian Department
of Communications (DOC).
Changes or modifications not expressly approved by NI could void the user’s authority to operate the equipment under the
FCC Rules.
Class A
Federal Communications Commission
This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to part 15 of the FCC
Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated
in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and
used in accordance with the instruction manual, may cause harmful interference to radio communications. Operation of this
equipment in a residential area is likely to cause harmful interference in which case the user is required to correct the interference
at their own expense.
www.fcc.gov for more information.
Canadian Department of Communications
This Class A digital apparatus meets all requirements of the Canadian Interference-Causing Equipment Regulations.
Cet appareil numérique de la classe A respecte toutes les exigences du Règlement sur le matériel brouilleur du Canada.
Compliance with EU Directives
Users in the European Union (EU) should refer to the Declaration of Conformity (DoC) for information* pertaining to the
CE marking. Refer to the Declaration of Conformity (DoC) for this product for any additional regulatory compliance
information. To obtain the DoC for this product, visit
and click the appropriate link in the Certification column.
* The CE marking Declaration of Conformity contains important supplementary information and instructions for the user or
installer.
ni.com/certification, search by model number or product line,
Page 6

Contents
About This Manual
Conventions ...................................................................................................................xv
Related Documentation..................................................................................................xvi
NI-DAQ........................................................................................................... xvi
NI-DAQmx for Linux......................................................................................xvii
NI-DAQmx Base.............................................................................................xvii
LabVIEW ........................................................................................................xvii
LabWindows™/CVI™....................................................................................xviii
Measurement Studio........................................................................................xviii
ANSI C without NI Application Software ......................................................xix
.NET Languages without NI Application Software ........................................xix
Device Documentation and Specifications...................................................... xix
Training Courses ............................................................................................. xix
Technical Support on the Web ........................................................................xix
Chapter 1
Getting Started
Installing NI-DAQmx ....................................................................................................1-1
Installing Other Software...............................................................................................1-1
Installing the Hardware..................................................................................................1-1
Device Pinouts ...............................................................................................................1-1
Device Specifications .................................................................................................... 1-2
Device Accessories and Cables .....................................................................................1-2
Chapter 2
DAQ System Overview
DAQ Hardware ..............................................................................................................2-1
DAQ-STC2......................................................................................................2-2
Calibration Circuitry........................................................................................2-3
Sensors and Transducers................................................................................................2-3
Cables and Accessories..................................................................................................2-4
Custom Cabling ...............................................................................................2-4
Programming Devices in Software ................................................................................2-5
© National Instruments Corporation vii NI 6232/6233 User Manual
Page 7

Contents
Chapter 3
Connector Information
I/O Connector Signal Descriptions................................................................................ 3-1
RTSI Connector Pinout ................................................................................................. 3-3
Chapter 4
Analog Input
Analog Input Circuitry .................................................................................................. 4-1
Analog Input Range....................................................................................................... 4-2
Analog Input Ground-Reference Settings ..................................................................... 4-3
Configuring AI Ground-Reference Settings in Software .................4-5
Multichannel Scanning Considerations ......................................................................... 4-6
Use Low Impedance Sources.......................................................................... 4-6
Use Short High-Quality Cabling..................................................................... 4-7
Carefully Choose the Channel Scanning Order ..............................................4-7
Avoid Switching from a Large to a Small Input Range ................... 4-7
Insert Grounded Channel between Signal Channels ........................ 4-8
Minimize Voltage Step between Adjacent Channels ....................... 4-8
Avoid Scanning Faster Than Necessary ......................................................... 4-9
Example 1 ......................................................................................... 4-9
Example 2 ......................................................................................... 4-9
Analog Input Data Acquisition Methods....................................................................... 4-9
Software-Timed Acquisitions ......................................................................... 4-9
Hardware-Timed Acquisitions........................................................................ 4-10
Buffered ............................................................................................ 4-10
Non-Buffered.................................................................................... 4-11
Analog Input Triggering................................................................................................ 4-11
Connecting Analog Voltage Input Signals .................................................................... 4-11
Types of Signal Sources ................................................................................................ 4-12
Floating Signal Sources .................................................................................. 4-13
Ground-Referenced Signal Sources ................................................................ 4-13
Differential Connection Considerations.......................................................... 4-13
Differential Connections for Ground-Referenced Signal Sources.................. 4-14
Differential Input Biasing................................................................. 4-15
Differential Connections for Non-Referenced or Floating Signal Sources .... 4-15
Single-Ended Connection Considerations ...................................................... 4-16
Single-Ended Connections for Floating or
Grounded Signal Sources............................................................... 4-17
Field Wiring Considerations.......................................................................................... 4-18
Analog Input Timing Signals ........................................................................................ 4-19
AI Sample Clock Signal.................................................................................. 4-22
Using an Internal Source .................................................................. 4-23
NI 6232/6233 User Manual viii ni.com
Page 8

Contents
Using an External Source..................................................................4-23
Routing AI Sample Clock Signal to an Output Terminal.................4-23
Other Timing Requirements..............................................................4-23
AI Sample Clock Timebase Signal..................................................................4-24
AI Convert Clock Signal .................................................................................4-25
Using an Internal Source...................................................................4-25
Using an External Source..................................................................4-26
Routing AI Convert Clock Signal to an Output Terminal ................4-26
Using a Delay from Sample Clock to Convert Clock.......................4-26
Other Timing Requirements..............................................................4-27
AI Convert Clock Timebase Signal.................................................................4-27
AI Hold Complete Event Signal...................................................................... 4-28
AI Start Trigger Signal .................................................................................... 4-28
Using a Digital Source ......................................................................4-28
Routing AI Start Trigger to an Output Terminal .............................. 4-29
AI Reference Trigger Signal ...........................................................................4-29
Using a Digital Source ......................................................................4-30
Routing AI Reference Trigger Signal to an Output Terminal ..........4-30
AI Pause Trigger Signal ..................................................................................4-30
Using a Digital Source ......................................................................4-31
Routing AI Pause Trigger Signal to an Output Terminal .................4-31
Getting Started with AI Applications in Software......................................................... 4-31
Chapter 5
Analog Output
Analog Output Circuitry ................................................................................................ 5-1
Minimizing Glitches on the Output Signal ....................................................................5-2
Analog Output Data Generation Methods .....................................................................5-2
Software-Timed Generations...........................................................................5-2
Hardware-Timed Generations .........................................................................5-3
Non-Buffered ....................................................................................5-3
Buffered ............................................................................................ 5-3
Analog Output Triggering ............................................................................................. 5-4
Connecting Analog Voltage Output Signals.................................................................. 5-4
Analog Output Timing Signals ......................................................................................5-5
AO Start Trigger Signal...................................................................................5-6
Using a Digital Source ......................................................................5-6
Routing AO Start Trigger Signal to an Output Terminal..................5-7
AO Pause Trigger Signal.................................................................................5-7
Using a Digital Source ......................................................................5-8
Routing AO Pause Trigger Signal to an Output Terminal................5-8
© National Instruments Corporation ix NI 6232/6233 User Manual
Page 9

Contents
AO Sample Clock Signal ................................................................................ 5-8
Using an Internal Source .................................................................. 5-9
Using an External Source ................................................................. 5-9
Routing AO Sample Clock Signal to an Output Terminal ............... 5-9
Other Timing Requirements ............................................................. 5-9
AO Sample Clock Timebase Signal................................................................ 5-10
Getting Started with AO Applications in Software....................................................... 5-10
Chapter 6
Digital Input and Output
I/O Protection ................................................................................................................ 6-1
Programmable Power-Up States.................................................................................... 6-1
Connecting Digital I/O Signals ..................................................................................... 6-2
Logic Conventions......................................................................................................... 6-3
Getting Started with DIO Applications in Software...................................................... 6-4
Chapter 7
Counters
Counter Input Applications ........................................................................................... 7-3
Counting Edges ............................................................................................... 7-3
Single Point (On-Demand) Edge Counting ...................................... 7-3
Buffered (Sample Clock) Edge Counting......................................... 7-4
Non-Cumulative Buffered Edge Counting ....................................... 7-5
Controlling the Direction of Counting.............................................. 7-5
Pulse-Width Measurement.............................................................................. 7-6
Single Pulse-Width Measurement .................................................... 7-6
Buffered Pulse-Width Measurement ................................................ 7-7
Period Measurement ....................................................................................... 7-7
Single Period Measurement.............................................................. 7-8
Buffered Period Measurement.......................................................... 7-8
Semi-Period Measurement.............................................................................. 7-9
Single Semi-Period Measurement .................................................... 7-9
Buffered Semi-Period Measurement ................................................ 7-10
Frequency Measurement ................................................................................. 7-10
Method 1—Measure Low Frequency with One Counter ................. 7-10
Method 1b—Measure Low Frequency with
One Counter (Averaged)................................................................ 7-11
Method 2—Measure High Frequency with Two Counters .............. 7-12
Method 3—Measure Large Range of Frequencies Using
Two Counters................................................................................. 7-13
Choosing a Method for Measuring Frequency ................................. 7-14
NI 6232/6233 User Manual x ni.com
Page 10

Contents
Position Measurement ..................................................................................... 7-16
Measurements Using Quadrature Encoders......................................7-16
Measurements Using Two Pulse Encoders.......................................7-18
Two-Signal Edge-Separation Measurement....................................................7-19
Single Two-Signal Edge-Separation Measurement ..........................7-19
Buffered Two-Signal Edge-Separation Measurement ......................7-20
Counter Output Applications ......................................................................................... 7-21
Simple Pulse Generation .................................................................................7-21
Single Pulse Generation .................................................................... 7-21
Single Pulse Generation with Start Trigger ......................................7-21
Retriggerable Single Pulse Generation .............................................7-22
Pulse Train Generation ....................................................................................7-23
Continuous Pulse Train Generation ..................................................7-23
Frequency Generation .....................................................................................7-24
Using the Frequency Generator ........................................................7-24
Frequency Division ......................................................................................... 7-25
Pulse Generation for ETS................................................................................7-25
Counter Timing Signals.................................................................................................7-26
Counter n Source Signal..................................................................................7-27
Routing a Signal to Counter n Source...............................................7-27
Routing Counter n Source to an Output Terminal ............................ 7-28
Counter n Gate Signal ..................................................................................... 7-28
Routing a Signal to Counter n Gate ..................................................7-28
Routing Counter n Gate to an Output Terminal................................ 7-28
Counter n Aux Signal ......................................................................................7-28
Routing a Signal to Counter n Aux................................................... 7-29
Counter n A, Counter n B, and Counter n Z Signals.......................................7-29
Routing Signals to A, B, and Z Counter Inputs ................................ 7-29
Routing Counter n Z Signal to an Output Terminal.......................... 7-29
Counter n Up_Down Signal ............................................................................7-29
Counter n HW Arm Signal ..............................................................................7-30
Routing Signals to Counter n HW Arm Input...................................7-30
Counter n Internal Output and Counter n TC Signals .....................................7-30
Routing Counter n Internal Output to an Output Terminal...............7-31
Frequency Output Signal.................................................................................7-31
Routing Frequency Output to a Terminal .........................................7-31
Default Counter Terminals ............................................................................................7-31
Counter Triggering ........................................................................................................ 7-32
Arm Start Trigger ............................................................................................7-32
Start Trigger..................................................................................................... 7-32
Pause Trigger...................................................................................................7-33
Other Counter Features..................................................................................................7-33
Cascading Counters .........................................................................................7-33
Counter Filters .................................................................................................7-33
© National Instruments Corporation xi NI 6232/6233 User Manual
Page 11

Contents
Chapter 8
PFI
Using PFI Terminals as Timing Input Signals .............................................................. 8-2
Exporting Timing Output Signals Using PFI Terminals............................................... 8-3
Using PFI Terminals as Static Digital Inputs and Outputs............................................ 8-3
Connecting PFI Input Signals........................................................................................ 8-3
PFI Filters ...................................................................................................................... 8-4
I/O Protection ................................................................................................................ 8-5
Programmable Power-Up States.................................................................................... 8-6
Connecting Digital I/O Signals ..................................................................................... 8-6
Prescaling ........................................................................................................ 7-34
Duplicate Count Prevention ............................................................................ 7-35
Duplicate Count Prevention Example .............................................. 7-35
Duplicate Count Example.................................................................7-36
Example Application That Prevents Duplicate Count...................... 7-37
When To Use Duplicate Count Prevention ...................................... 7-38
Enabling Duplicate Count Prevention in NI-DAQmx...................... 7-38
Synchronization Modes................................................................................... 7-38
80 MHz Source Mode....................................................................... 7-39
Other Internal Source Mode ............................................................. 7-40
External Source Mode ...................................................................... 7-40
Chapter 9
Isolation and Digital Isolators
Digital Isolation............................................................................................................. 9-2
Benefits of an Isolated DAQ Device ............................................................................. 9-2
Chapter 10
Digital Routing and Clock Generation
Clock Routing................................................................................................................ 10-1
80 MHz Timebase........................................................................................... 10-2
20 MHz Timebase........................................................................................... 10-2
100 kHz Timebase .......................................................................................... 10-2
External Reference Clock ...............................................................................10-2
10 MHz Reference Clock................................................................................ 10-3
Synchronizing Multiple Devices ................................................................................... 10-3
Real-Time System Integration Bus (RTSI) ................................................................... 10-3
RTSI Connector Pinout................................................................................... 10-4
Using RTSI as Outputs ................................................................................... 10-5
NI 6232/6233 User Manual xii ni.com
Page 12
PXI Clock and Trigger Signals......................................................................................10-8
Chapter 11
Bus Interface
DMA Controllers ...........................................................................................................11-1
PXI Considerations ........................................................................................................11-2
Data Transfer Methods ..................................................................................................11-3
Contents
Using RTSI Terminals as Timing Input Signals .............................................10-6
RTSI Filters ..................................................................................................... 10-6
PXI_CLK10.....................................................................................................10-8
PXI Triggers ....................................................................................................10-8
PXI_STAR Trigger ......................................................................................... 10-8
PXI_STAR Filters ...........................................................................................10-9
PXI Clock and Trigger Signals........................................................................11-2
PXI and PXI Express.......................................................................................11-2
Using PXI with CompactPCI ..........................................................................11-3
Direct Memory Access (DMA) .......................................................................11-3
Interrupt Request (IRQ)...................................................................................11-4
Programmed I/O .............................................................................................. 11-4
Changing Data Transfer Methods between DMA and IRQ ............................11-4
Chapter 12
Triggering
Triggering with a Digital Source ...................................................................................12-1
Appendix A
Device-Specific Information
Appendix B
Troubleshooting
Appendix C
Technical Support and Professional Services
Glossary
Index
© National Instruments Corporation xiii NI 6232/6233 User Manual
Page 13
About This Manual
The NI 6232/6233 User Manual contains information about using the
National Instruments 6232/6233 M Series data acquisition (DAQ) devices
with NI-DAQmx 8.0 and later. NI 6232/6233 devices feature eight analog
input (AI) channels, four analog output (AO) channels, two counters, six
lines of digital input (DI), and four lines of digital output (DO).
Conventions
The following conventions are used in this manual:
<> Angle brackets that contain numbers separated by an ellipsis represent
a range of values associated with a bit or signal name—for example,
AO <3..0>.
[ ] Square brackets enclose optional items—for example, [
» The » symbol leads you through nested menu items and dialog box options
to a final action. The sequence File»Page Setup»Options directs you to
pull down the File menu, select the Page Setup item, and select Options
from the last dialog box.
This icon denotes a note, which alerts you to important information.
This icon denotes a caution, which advises you of precautions to take to
avoid injury, data loss, or a system crash. When this symbol is marked on a
product, refer to the NI 6232/6233 Specifcations for information about
precautions to take.
When symbol is marked on a product, it denotes a warning advising you to
take precautions to avoid electrical shock.
When symbol is marked on a product, it denotes a component that may be
hot. Touching this component may result in bodily injury.
bold Bold text denotes items that you must select or click in the software, such
as menu items and dialog box options. Bold text also denotes parameter
names.
italic Italic text denotes variables, emphasis, a cross-reference, or an introduction
to a key concept. Italic text also denotes text that is a placeholder for a word
or value that you must supply.
response].
© National Instruments Corporation xv NI 6232/6233 User Manual
Page 14
About This Manual
monospace Text in this font denotes text or characters that you should enter from the
keyboard, sections of code, programming examples, and syntax examples.
This font is also used for the proper names of disk drives, paths, directories,
programs, subprograms, subroutines, device names, functions, operations,
variables, filenames, and extensions.
Related Documentation
Each application software package and driver includes information about
writing applications for taking measurements and controlling measurement
devices. The following references to documents assume you have
NI-DAQmx 8.0 or later, and where applicable, version 7.0 or later of the NI
application software.
NI-DAQ
The DAQ Getting Started Guide describes how to install your NI-DAQmx
for Windows software, your NI-DAQmx-supported DAQ device, and how
to confirm that your device is operating properly. Select Start»All
Programs»National Instruments»NI-DAQ»DAQ Getting Started
Guide.
The NI-DAQ Readme lists which devices are supported by this version of
NI-DAQ. Select Start»All Programs»National Instruments»NI-DAQ»
NI-DAQ Readme.
The NI-DAQmx Help contains general information about measurement
concepts, key NI-DAQmx concepts, and common applications that are
applicable to all programming environments. Select Start»All Programs»
National Instruments»NI-DAQ»NI-DAQmx Help.
NI-DAQmx for Linux
The DAQ Getting Started Guide describes how to install your
NI-DAQmx-supported DAQ device and confirm that your device is
operating properly.
The NI-DAQ Readme for Linux lists supported devices and includes
software installation instructions, frequently asked questions, and known
issues.
The C Function Reference Help describes functions and attributes.
NI 6232/6233 User Manual xvi ni.com
Page 15

About This Manual
The NI-DAQmx for Linux Configuration Guide provides configuration
instructions, templates, and instructions for using test panels.
Note All NI-DAQmx documentation for Linux is installed at
natinst/nidaqmx/docs
NI-DAQmx Base
LabVIEW
/usr/local/
.
The NI-DAQmx Base Getting Started Guide describes how to install your
NI-DAQmx Base software, your NI-DAQmx Base-supported DAQ device,
and how to confirm that your device is operating properly. Select Start»All
Programs»National Instruments»NI-DAQmx Base»Documentation»
Getting Started Guide.
The NI-DAQmx Base Readme lists which devices are supported by this
version of NI-DAQmx Base. Select Start»All Programs»National
Instruments»NI-DAQmx Base»Documentation»Readme.
The NI-DAQmx Base VI Reference Help contains VI reference and general
information about measurement concepts. In LabVIEW, select Help»
NI-DAQmx Base VI Reference Help.
The NI-DAQmx Base C Reference Help contains C reference and general
information about measurement concepts. Select Start»All Programs»
National Instruments»NI-DAQmx Base»Documentation»C Function
Reference Manual.
If you are a new user, use the Getting Started with LabVIEW manual to
familiarize yourself with the LabVIEW graphical programming
environment and the basic LabVIEW features you use to build data
acquisition and instrument control applications. Open the Getting Started
with LabVIEW manual by selecting Start»All Programs»National
Instruments»LabVIEW»LabVIEW Manuals or by navigating to the
labview\manuals directory and opening
LV_Getting_Started.pdf.
Use the LabVIEW Help, available by selecting Help»Search the
LabVIEW Help in LabVIEW, to access information about LabVIEW
programming concepts, step-by-step instructions for using LabVIEW, and
reference information about LabVIEW VIs, functions, palettes, menus, and
tools. Refer to the following locations on the Contents tab of the LabVIEW
Help for information about NI-DAQmx:
© National Instruments Corporation xvii NI 6232/6233 User Manual
Page 16
About This Manual
• Getting Started»Getting Started with DAQ—Includes overview
information and a tutorial to learn how to take an NI-DAQmx
measurement in LabVIEW using the DAQ Assistant.
• VI and Function Reference»Measurement I/O VIs and
Functions—Describes the LabVIEW NI-DAQmx VIs and properties.
• Taking Measurements—Contains the conceptual and how-to
information you need to acquire and analyze measurement data in
LabVIEW, including common measurements, measurement
fundamentals, NI-DAQmx key concepts, and device considerations.
LabWindows™/CVI
™
The Data Acquisition book of the LabWindows/CVI Help contains
measurement concepts for NI-DAQmx. This book also contains Taking an
NI-DAQmx Measurement in LabWindows/CVI, which includes
step-by-step instructions about creating a measurement task using the DAQ
Assistant. In LabWindows/CVI, select Help»Contents, then select Using
LabWindows/CVI»Data Acquisition.
The NI-DAQmx Library book of the LabWindows/CVI Help contains API
overviews and function reference for NI-DAQmx. Select Library
Reference»NI-DAQmx Library in the LabWindows/CVI Help.
Measurement Studio
The NI Measurement Studio Help contains function reference,
measurement concepts, and a walkthrough for using the Measurement
Studio NI-DAQmx .NET and Visual C++ class libraries. This help
collection is integrated into the Microsoft Visual Studio .NET
documentation. In Visual Studio .NET, select Help»Contents.
Note You must have Visual Studio .NET installed to view the NI Measurement Studio
Help.
ANSI C without NI Application Software
The NI-DAQmx Help contains API overviews and general information
about measurement concepts. Select Start»All Programs»National
Instruments»NI-DAQmx Help.
.NET Languages without NI Application Software
The NI Measurement Studio Help contains function reference and
measurement concepts for using the Measurement Studio NI-DAQmx
NI 6232/6233 User Manual xviii ni.com
Page 17
.NET and Visual C++ class libraries. This help collection is integrated into
the Visual Studio .NET documentation. In Visual Studio .NET, select
Help»Contents.
Note You must have Visual Studio .NET installed to view the NI Measurement Studio
Help.
Device Documentation and Specifications
The NI 6232/6233 Specifications contains all specifications for
NI 6232/6233 M Series devices.
NI-DAQ 7.0 and later includes the Device Document Browser, which
contains online documentation for supported DAQ, SCXI, and switch
devices, such as help files describing device pinouts, features, and
operation, and PDF files of the printed device documents. You can find,
view, and/or print the documents for each device using the Device
Document Browser at any time by inserting the CD. After installing the
Device Document Browser, device documents are accessible from Start»
All Programs»National Instruments»NI-DAQ»Browse Device
Documentation.
About This Manual
Training Courses
If you need more help getting started developing an application with NI
products, NI offers training courses. To enroll in a course or obtain a
detailed course outline, refer to
ni.com/training.
Technical Support on the Web
For additional support, refer to ni.com/support or zone.ni.com.
Note You can download these documents at
DAQ specifications and some DAQ manuals are available as PDFs. You
must have Adobe Acrobat Reader with Search and Accessibility 5.0.5 or
later installed to view the PDFs. Refer to the Adobe Systems Incorporated
Web site at
National Instruments Product Manuals Library at
updated documentation resources.
© National Instruments Corporation xix NI 6232/6233 User Manual
www.adobe.com to download Acrobat Reader. Refer to the
ni.com/manuals.
ni.com/manuals for
Page 18
Getting Started
M Series NI 6232/6233 devices feature sixteen analog input (AI) channels,
two analog output (AO) channels, two counters, six lines of digital input
(DI), and four lines of digital output (DO). If you have not already installed
your device, refer to the DAQ Getting Started Guide. For NI 6232/6233
device specifications, refer to the NI 6232/6233 Specifications on
ni.com/manuals.
Before installing your DAQ device, you must install the software you plan
to use with the device.
Installing NI-DAQmx
The DAQ Getting Started Guide, which you can download at
ni.com/manuals, offers NI-DAQmx users step-by-step instructions for
installing software and hardware, configuring channels and tasks, and
getting started developing an application.
1
Installing Other Software
If you are using other software, refer to the installation instructions that
accompany your software.
Installing the Hardware
The DAQ Getting Started Guide contains non-software-specific
information on how to install PCI and PXI devices, as well as accessories
and cables.
Device Pinouts
Refer to Appendix A, Device-Specific Information, for the NI 6232/6233
device pinout.
© National Instruments Corporation 1-1 NI 6232/6233 User Manual
Page 19
Chapter 1 Getting Started
Device Specifications
Refer to the NI 6232/6233 Specifications, available on the NI-DAQ Device
Document Browser or
on the NI 6232/6233 device.
ni.com/manuals, for more detailed information
Device Accessories and Cables
NI offers a variety of accessories and cables to use with your DAQ device.
Refer to Appendix A, Device-Specific Information, or
information.
ni.com for more
NI 6232/6233 User Manual 1-2 ni.com
Page 20
DAQ System Overview
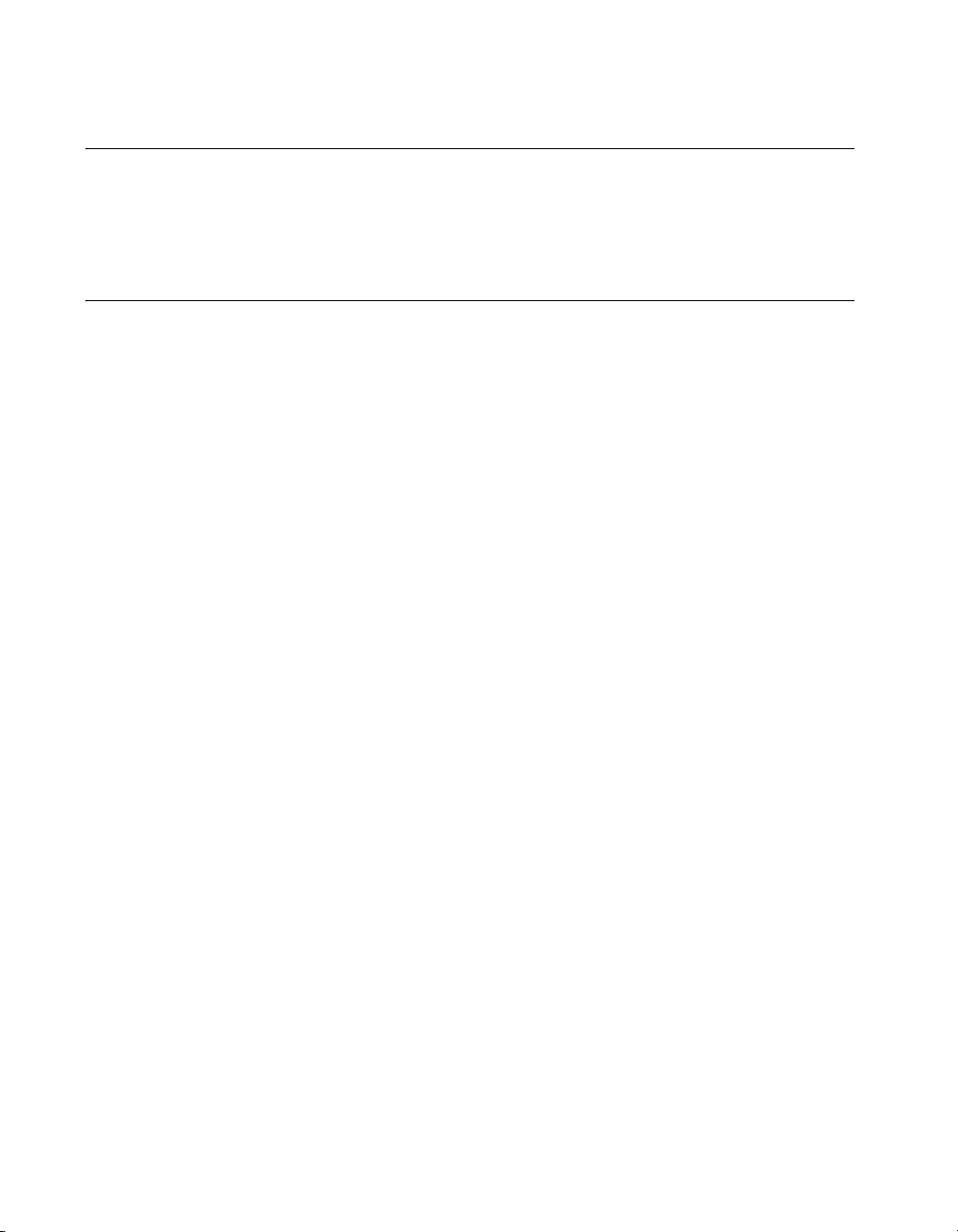
Figure 2-1 shows a typical DAQ system, which includes sensors,
transducers, cables that connect the various devices to the accessories, the
M Series device, programming software, and a PC. The following sections
cover the components of a typical DAQ system.
2
Sensors and
Transducers
DAQ Hardware
Cables and
Accessories
DAQ hardware digitizes signals, performs D/A conversions to generate
analog output signals, and measures and controls digital I/O signals.
Figure 2-2 features the components of the NI 6232/6233 device.
DAQ
Hardware
Figure 2-1. Components of a Typical DAQ System
DAQ
Software
Personal
Computer
© National Instruments Corporation 2-1 NI 6232/6233 User Manual
Page 21
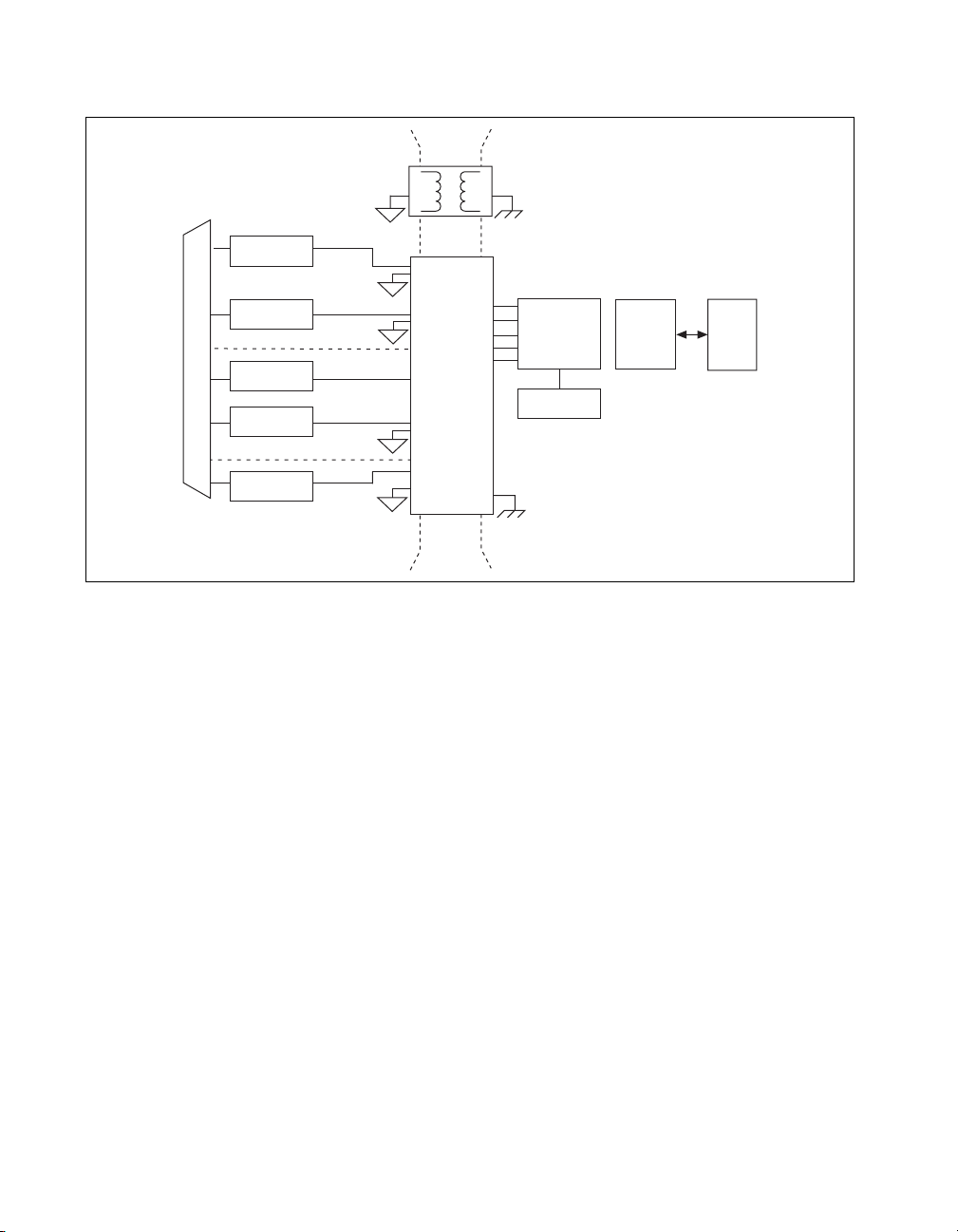
Chapter 2 DAQ System Overview
Analog Input
Analog Output
I/O Connector
Counters
PFI/Static DI
AI GND
AO GND
P0.GND
A
Isolation
Barrier
A
Digital
A
Digital
Isolators
P0
Routing
and Clock
Generation
RTSI
Bus
Interface
Bus
DAQ-STC2
PFI/Static DO
P1.GND
P1
Figure 2-2. General NI 6232/6233 Block Diagram
The DAQ-STC2 implements a high-performance digital engine for
NI 6232/6233 data acquisition hardware. Some key features of this engine
include the following:
• Flexible AI and AO sample and convert timing
• Many triggering modes
• Independent AI and AO FIFOs
• Generation and routing of RTSI signals for multi-device
synchronization
• Generation and routing of internal and external timing signals
• Two flexible 32-bit counter/timer modules with hardware gating
• Static DIO signals
• PLL for clock synchronization
• PCI/PXI interface
• Independent scatter-gather DMA controllers for all acquisition and
generation functions
NI 6232/6233 User Manual 2-2 ni.com
Page 22

Calibration Circuitry
The M Series analog inputs and outputs have calibration circuitry to correct
gain and offset errors. You can calibrate the device to minimize AI and AO
errors caused by time and temperature drift at run time. No external
circuitry is necessary; an internal reference ensures high accuracy and
stability over time and temperature changes.
Factory-calibration constants are permanently stored in an onboard
EEPROM and cannot be modified. When you self-calibrate the device,
software stores new constants in a user-modifiable section of the EEPROM.
To return a device to its initial factory calibration settings, software can
copy the factory-calibration constants to the user-modifiable section of the
EEPROM. Refer to the NI-DAQmx Help or the LabVIEW 8.x Help for more
information on using calibration constants.
Sensors and Transducers
Sensors can generate electrical signals to measure physical phenomena,
such as temperature, force, sound, or light. Some commonly used sensors
are strain gauges, thermocouples, thermistors, angular encoders, linear
encoders, and resistance temperature detectors (RTDs).
Chapter 2 DAQ System Overview
To measure signals from these various transducers, you must convert them
into a form that a DAQ device can accept. For example, the output voltage
of most thermocouples is very small and susceptible to noise. Therefore,
you may need to amplify or filter the thermocouple output before digitizing
it, or use the smallest measurement range available within the DAQ device.
For more information about sensors, refer to the following documents.
• For general information about sensors, visit
• If you are using LabVIEW, refer to the LabVIEW Help by selecting
Help»Search the LabVIEW Help in LabVIEW, and then navigate to
the Taking Measurements book on the Contents tab.
• If you are using other application software, refer to Common Sensors
in the NI-DAQmx Help, which can be accessed from Start»All
Programs»National Instruments»NI-DAQ»NI-DAQmx Help.
© National Instruments Corporation 2-3 NI 6232/6233 User Manual
ni.com/sensors.
Page 23
Chapter 2 DAQ System Overview
Cables and Accessories
NI offers a variety of products to use with NI 6232/6233 devices, including
cables, connector blocks, and other accessories, as follows:
• Cables and cable assemblies
– Shielded
– Unshielded ribbon
• Screw terminal connector blocks, shielded and unshielded
• RTSI bus cables
Custom Cabling
For more specific information about these products, refer to
Refer to the Custom Cabling section of this chapter, the Field Wiring
Considerations section of Chapter 4, Analog Input, and Appendix A,
Device-Specific Information, for information on how to select accessories
for your M Series device.
NI offers cables and accessories for many applications. However, if you
want to develop your own cable, the following kits can assist you:
• TB-37F-37SC—37-pin solder cup terminals, shell with strain relief
• TB-37F-37CP—37-pin crimp & poke terminals, shell with strain
relief
Also, adhere to the following guidelines for best results:
• For AI signals, use shielded, twisted-pair wires for each AI pair of
differential inputs. Connect the shield for each signal pair to the ground
reference at the source.
• Route the analog lines separately from the digital lines.
• When using a cable shield, use separate shields for the analog and
digital sections of the cable. Failure to do so results in noise coupling
into the analog signals from transient digital signals.
ni.com.
For more information on the connectors used for DAQ devices, refer to the
KnowledgeBase document, Specifications and Manufacturers for Board
Mating Connectors, by going to
rdspmb.
NI 6232/6233 User Manual 2-4 ni.com
ni.com/info and entering the info code
Page 24
Programming Devices in Software
National Instruments measurement devices are packaged with NI-DAQ
driver software, an extensive library of functions and VIs you can call from
your application software, such as LabVIEW or LabWindows/CVI, to
program all the features of your NI measurement devices. Driver software
has an application programming interface (API), which is a library of VIs,
functions, classes, attributes, and properties for creating applications for
your device.
NI-DAQ includes two NI-DAQ drivers, Traditional NI-DAQ (Legacy) and
NI-DAQmx. M Series devices use the NI-DAQmx driver. Each driver has
its own API, hardware configuration, and software configuration. Refer to
the DAQ Getting Started Guide for more information about the two drivers.
NI-DAQmx includes a collection of programming examples to help you get
started developing an application. You can modify example code and save
it in an application. You can use examples to develop a new application or
add example code to an existing application.
To locate LabVIEW and LabWindows/CVI examples, open the National
Instruments Example Finder.
• In LabVIEW, select Help»Find Examples.
• In LabWindows/CVI, select Help»NI Example Finder.
Chapter 2 DAQ System Overview
Measurement Studio, Visual Basic, and ANSI C examples are located in the
following directories:
• NI-DAQmx examples for Measurement Studio-supported languages
are in the following directories:
–
MeasurementStudio\VCNET\Examples\NIDaq
– MeasurementStudio\DotNET\Examples\NIDaq
• NI-DAQmx examples for ANSI C are in the
NI-DAQ\Examples\DAQmx ANSI C Dev directory
For additional examples, refer to
© National Instruments Corporation 2-5 NI 6232/6233 User Manual
zone.ni.com.
Page 25
3
Connector Information
The I/O Connector Signal Descriptions and RTSI Connector Pinout
sections contain information on M Series connectors. Refer to
Appendix A, Device-Specific Information, for device I/O connector
pinouts.
I/O Connector Signal Descriptions
Table 3-1 describes the signals found on the I/O connectors. Not all signals
are available on all devices.
Table 3-1. I/O Connector Signals
Signal Name Reference Direction Description
AI GND — — Analog Input Ground—These terminals are the input bias
current return point. AI GND and AO GND are connected on
the device.
Note: AI GND and AO GND are isolated from earth ground,
chassis ground, P0.GND, and P1.GND.
AI <0..15> AI GND Input Analog Input Channels 0 to 15—For single-ended
measurements, each signal is an analog input voltage channel.
In RSE mode, AI GND is the reference for these signals.
For differential measurements, AI 0 and AI 8 are the positive
and negative inputs of differential analog input channel 0.
Similarly, the following signal pairs also form differential
input channels:
<AI1,AI9>, <AI2,AI10>, <AI3,AI11>, <AI4,AI12>,
<AI5,AI13>, <AI6,AI14>, <AI7,AI15>
Also refer to the Analog Input Ground-Reference Settings
section of Chapter 4, Analog Input.
Note: AI <0..15> are isolated from earth ground and chassis
ground.
AO <0..1> AO GND Output Analog Output Channels 0 to 1—These terminals supply the
voltage output of AO channels 0 to 1.
Note: AO <0..1> are isolated from earth ground and chassis
ground.
© National Instruments Corporation 3-1 NI 6232/6233 User Manual
Page 26

Chapter 3 Connector Information
Table 3-1. I/O Connector Signals (Continued)
Signal Name Reference Direction Description
AO GND — — Analog Output Ground—AO GND is the reference for
AO <0..1>. AI GND and AO GND are connected on the
device.
Note: AI GND and AO GND are isolated from earth ground,
chassis ground, P0.GND, and P1.GND.
PFI <0..5>/P0.<0..5> P0.GND Input Programmable Function Interface or Static Digital Input
Channels 0 to 5—Each of these terminals can be individually
configured as an input directional PFI terminal or a digital
input terminal.
As an input, each input PFI terminal can be used to supply an
external source for AI or AO timing signals or counter/timer
inputs.
Note: PFI <0..5>/P0.<0..5> are isolated from earth ground,
chassis ground, AI GND, AO GND, and P1.GND.
PFI <6..9>/P1.<0..3> P1.GND Output Programmable Function Interface or Static Digital
Output Channels 6 to 9—Each of these terminals can be
individually configured as an output directional PFI terminal
or a digital output terminal.
As a PFI output, you can route many different internal AI or
AO timing signals to each PFI terminal. You also can route the
counter/timer outputs to each PFI terminal.
Note: PFI <6..9>/P1.<0..3> are isolated from earth ground,
chassis ground, AI GND, AO GND, and P0.GND.
NC — — No connect—Do not connect signals to these terminals.
P0.GND — — Digital Input Ground—P0.GND supplies the reference for
input PFI <0..5>/P0.<0..5>.
Note: P0.GND is isolated from earth ground, chassis ground,
AI GND, AO GND, and P1.GND.
P1.GND — — Digital Output Ground—P1.GND supplies the reference for
P1.VCC — — Digital Output Power—P1.VCC supplies the power for
NI 6232/6233 User Manual 3-2 ni.com
output PFI <6..9>/P1.<0..3>.
Note: P1.GND is isolated from earth ground, chassis ground,
AI GND, AO GND, and P0.GND.
digital output lines. The actual power consumed depends on
the load connected between the digital output and P1.GND.
Page 27
RTSI Connector Pinout
Refer to the RTSI Connector Pinout section of Chapter 10, Digital Routing
and Clock Generation, for information on the RTSI connector.
Chapter 3 Connector Information
© National Instruments Corporation 3-3 NI 6232/6233 User Manual
Page 28
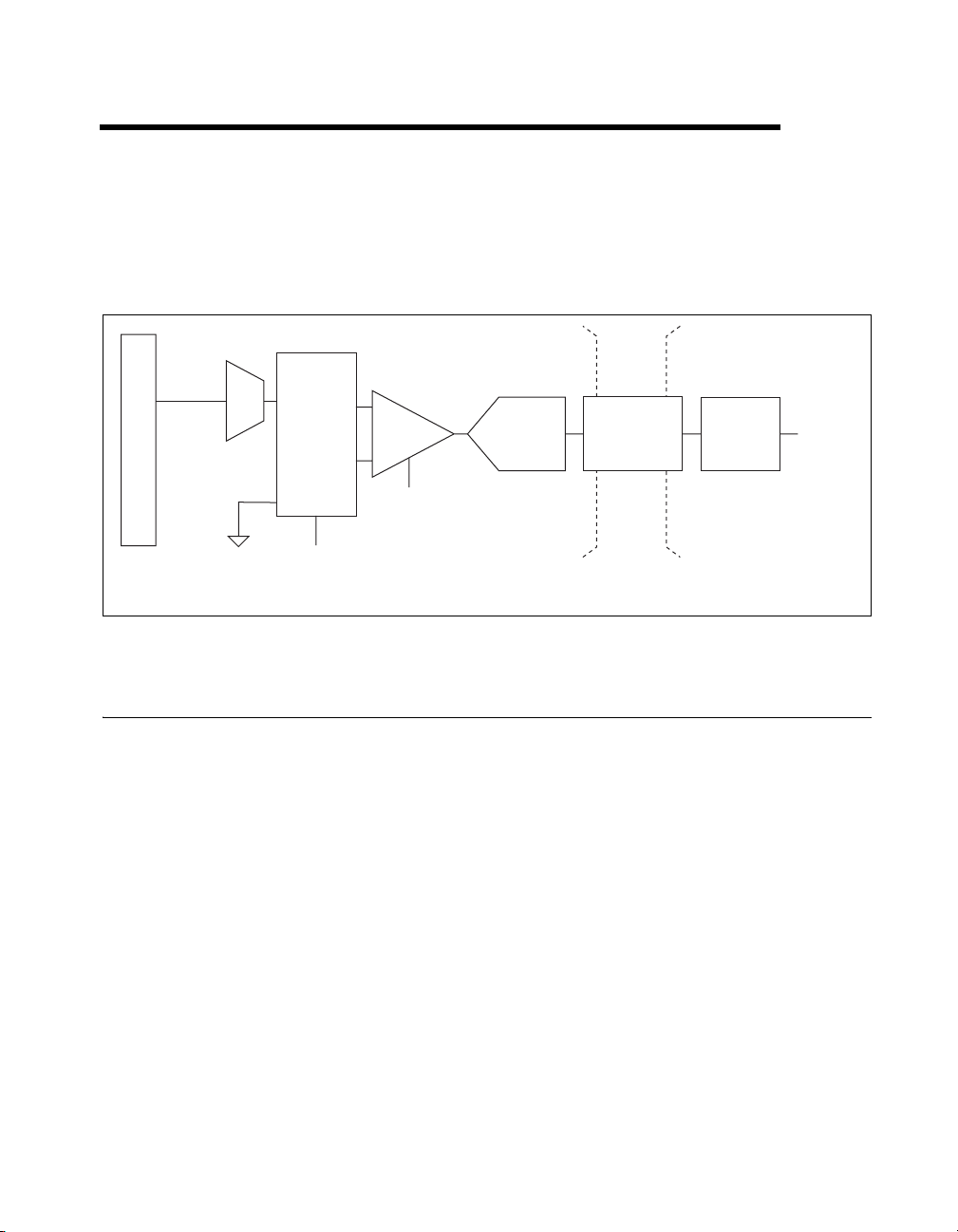
Analog Input
Figure 4-1 shows the analog input circuitry of NI 6232/6233 devices.
4
Isolation
Barrier
AI <0..n>
I/O Connector
AI GND
Mux
DIFF,
RSE,
or NRSE
AI Terminal
Configuration
Selection
NI-PGIA
Input Range
Selection
Analog Input Circuitry
I/O Connector
You can connect analog input signals to the M Series device through the I/O
connector. The proper way to connect analog input signals depends on the
analog input ground-reference settings, described in the Analog Input
Ground-Reference Settings section. Also refer to Appendix A,
Device-Specific Information, for device I/O connector pinouts.
MUX
Each M Series device has one analog-to-digital converter (ADC). The
multiplexers (MUX) route one AI channel at a time to the ADC through the
NI-PGIA.
ADC
Figure 4-1. NI 6232/6233 Analog Input Circuitry
Digital
Isolators
AI FIFO
AI Data
© National Instruments Corporation 4-1 NI 6232/6233 User Manual
Page 29

Chapter 4 Analog Input
Ground-Reference Settings
The analog input ground-reference settings circuitry selects between
differential and referenced single-ended modes. Each AI channel can use a
different mode.
Instrumentation Amplifier (NI-PGIA)
The NI programmable gain instrumentation amplifier (PGIA) is a
measurement and instrument class amplifier that minimizes settling times
for all input ranges. The NI-PGIA can amplify or attenuate an AI signal to
ensure that you use the maximum resolution of the ADC.
M Series devices use the NI-PGIA to deliver high accuracy even when
sampling multiple channels with small input ranges at fast rates. M Series
devices can sample channels in any order at the maximum conversion rate,
and you can individually program each channel in a sample with a different
input range.
A/D Converter
The analog-to-digital converter (ADC) digitizes the AI signal by converting
the analog voltage into a digital number.
Isolation Barrier and Digital Isolators
The digital isolators across the isolation barrier provide a ground break
between the isolated analog front end and the earth/chassis/building
ground.
AI FIFO
M Series devices can perform both single and multiple A/D conversions of
a fixed or infinite number of samples. A large first-in-first-out (FIFO)
buffer holds data during AI acquisitions to ensure that no data is lost.
M Series devices can handle multiple A/D conversion operations with
DMA, interrupts, or programmed I/O.
Analog Input Range
Input range refers to the set of input voltages that an analog input channel
can digitize with the specified accuracy. The NI-PGIA amplifies or
attenuates the AI signal depending on the input range. You can individually
program the input range of each AI channel on your M Series device.
The input range affects the resolution of the M Series device for an AI
channel. Resolution refers to the voltage of one ADC code. For example, a
NI 6232/6233 User Manual 4-2 ni.com
Page 30
Chapter 4 Analog Input
16-bit ADC converts analog inputs into one of 65,536 (= 216) codes—that
is, one of 65,536 possible digital values. These values are spread fairly
evenly across the input range. So, for an input range of –10 V to 10 V, the
voltage of each code of a 16-bit ADC is:
(10 V – (–10 V))
16
2
M Series devices use a calibration method that requires some codes
(typically about 5% of the codes) to lie outside of the specified range. This
calibration method improves absolute accuracy, but it increases the nominal
resolution of input ranges by about 5% over what the formula shown above
would indicate.
Choose an input range that matches the expected input range of your signal.
A large input range can accommodate a large signal variation, but reduces
the voltage resolution. Choosing a smaller input range improves the voltage
resolution, but may result in the input signal going out of range.
For more information on programming these settings, refer to the
NI-DAQmx Help or the LabVIEW 8.x Help.
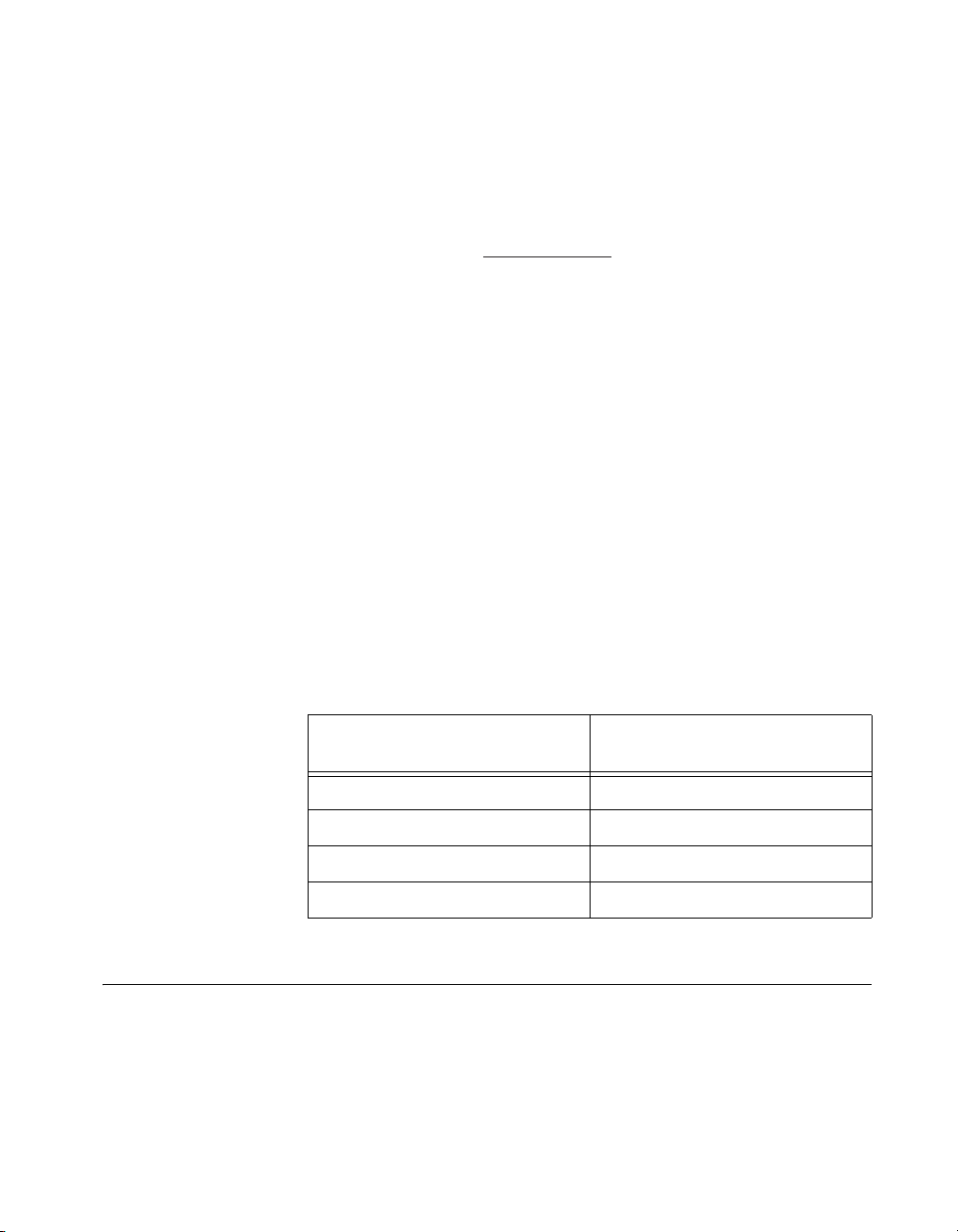
Table 4-1 shows the input ranges and resolutions supported by the
NI 6232/6233 device.
Table 4-1. Input Ranges for NI 6232/6233
Input Range
–10 V to 10 V 320 μV
= 305 mV
Nominal Resolution Assuming
5% Over Range
–5 V to 5 V 160 μV
–1 V to 1 V 32 μV
–200 mV to 200 mV 6.4 μV
Analog Input Ground-Reference Settings
NI 6232/6233 devices support the analog input ground-reference settings
shown in Table 4-2.
© National Instruments Corporation 4-3 NI 6232/6233 User Manual
Page 31

Chapter 4 Analog Input
AI Ground-Reference
Settings
DIFF In differential (DIFF) mode, the NI 6232/6233 device measures the
RSE In referenced single-ended (RSE) mode, the NI 6232/6233 device
NRSE Non-referenced single-ended (NRSE) mode is identical to RSE mode
Table 4-2. Analog Input Ground-Reference Settings
Description
difference in voltage between two AI signals. AI GND is the bias
current return point for DIFF mode.
measures the voltage of an AI signal relative to AI GND, which is
isolated from earth/chassis ground. The ground reference point is
provided by the user through AI GND.
on NI 6232/6233 devices.
The AI ground-reference setting determines how you should connect your
AI signals to the NI 6232/6233 device. Refer to the Connecting Analog
Voltage Input Signals section for more information.
Ground-reference settings are programmed on a per-channel basis. For
example, you might configure the device to scan five channels—two
differentially-configured channels and three single-ended channels.
NI 6232/6233 devices implement the different analog input
ground-reference settings by routing different signals to the PGIA. The
PGIA is a differential amplifier. That is, the PGIA amplifies (or attenuates)
the difference in voltage between its two inputs. The PGIA drives the ADC
with this amplified voltage. The amount of amplification (the gain), is
determined by the analog input range, as shown in Figure 4-2.
Instrumentation
Amplifier
V
in+
V
m
] × Gain
+
Measured
Voltage
–
PGIA
V
in–
Vm = [V
in+
– V
in–
Figure 4-2. PGIA
NI 6232/6233 User Manual 4-4 ni.com
Page 32

Chapter 4 Analog Input
Table 4-3 shows how signals are routed to the NI-PGIA.
Table 4-3. Signals Routed to the NI-PGIA
AI Ground-Reference
Settings
Signals Routed to the Positive
Input of the NI-PGIA (V
in+
)
Signals Routed to the Negative
Input of the NI-PGIA (V
RSE and NRSE AI <0..15> AI GND
DIFF AI <0..7> AI <8..15>
For differential measurements, AI 0 and AI 8 are the positive and negative
inputs of differential analog input channel 0. For a complete list of signal
pairs that form differential input channels, refer to the I/O Connector Signal
Descriptions section of Chapter 3, Connector Information.
Caution The maximum input voltages rating of AI signals with respect to AI GND (and
for differential signals with respect to each other) and earth/chassis ground are listed in the
Maximum Working Voltage section of the NI 6232/6233 Specifications. Exceeding the
maximum input voltage or maximum working voltage of AI signals distorts the
measurement results. Exceeding the maximum input voltage or maximum working voltage
rating also can damage the device and the computer. Exceeding the maximum input voltage
can cause injury and harm the user. NI is not liable for any damage or injuries resulting
from such signal connections.
AI ground-reference setting is sometimes referred to as AI terminal
configuration.
in–
)
Configuring AI Ground-Reference Settings in Software
You can program channels on an M Series device to acquire with different
ground references.
To enable multimode scanning in LabVIEW, use
Virtual Channel.vi
of the NI-DAQmx API. You must use a new VI for
each channel or group of channels configured in a different input mode. In
Figure 4-3, channel 0 is configured in differential mode, and channel 1 is
configured in RSE mode.
© National Instruments Corporation 4-5 NI 6232/6233 User Manual
NI-DAQmx Create
Page 33

Chapter 4 Analog Input
Figure 4-3. Enabling Multimode Scanning in LabVIEW
Multichannel Scanning Considerations
M Series devices can scan multiple channels at high rates and digitize the
signals accurately. However, you should consider several issues when
designing your measurement system to ensure the high accuracy of your
measurements.
In multichannel scanning applications, accuracy is affected by settling
time. When your M Series device switches from one AI channel to another
AI channel, the device configures the NI-PGIA with the input range of the
new channel. The NI-PGIA then amplifies the input signal with the gain for
the new input range. Settling time refers to the time it takes the NI-PGIA to
amplify the input signal to the desired accuracy before it is sampled by the
ADC. The NI 6232/6233 Specifications shows the device settling time.
M Series devices are designed to have fast settling times. However several
factors can increase the settling time which decreases the accuracy of your
measurements. To ensure fast settling times, you should do the following
(in order of importance):
• Use low impedance sources
• Use short high-quality cabling
• Carefully choose the channel scanning order
• Avoid scanning faster than necessary
Refer to the following sections for more information on these factors.
Use Low Impedance Sources
To ensure fast settling times, your signal sources should have an impedance
of <1 kΩ. Large source impedances increase the settling time of the PGIA,
and so decrease the accuracy at fast scanning rates.
NI 6232/6233 User Manual 4-6 ni.com
Page 34

Settling times increase when scanning high-impedance signals due to a
phenomenon called charge injection. Multiplexers contain switches,
usually made of switched capacitors. When one of the channels, for
example channel 0, is selected in a multiplexer, those capacitors
accumulate charge. When the next channel, for example channel 1, is
selected, the accumulated charge leaks backward through channel 1. If the
output impedance of the source connected to channel 1 is high enough, the
resulting reading of channel 1 can be partially affected by the voltage on
channel 0. This effect is referred to as ghosting.
If your source impedance is high, you can decrease the scan rate to allow
the PGIA more time to settle. Another option is to use a voltage follower
circuit external to your DAQ device to decrease the impedance seen by the
DAQ device. Refer to the KnowledgeBase document, How Do I Create a
Buffer to Decrease the Source Impedance of My Analog Input Signal?, by
going to
ni.com/info and entering the info code rdbbis.
Use Short High-Quality Cabling
Using short high-quality cables can minimize several effects that degrade
accuracy including crosstalk, transmission line effects, and noise. The
capacitance of the cable also can increase the settling time.
Chapter 4 Analog Input
National Instruments recommends using individually shielded,
twisted-pair wires that are 2 m or less to connect AI signals to the device.
Refer to the Connecting Analog Voltage Input Signals section for more
information.
Carefully Choose the Channel Scanning Order
Avoid Switching from a Large to a Small Input Range
Switching from a channel with a large input range to a channel with a small
input range can greatly increase the settling time.
Suppose a 4 V signal is connected to channel 0 and a 1 mV signal is
connected to channel 1. The input range for channel 0 is –10 V to 10 V and
the input range of channel 1 is –200 mV to 200 mV.
When the multiplexer switches from channel 0 to channel 1, the input to the
PGIA switches from 4 V to 1 mV. The approximately 4 V step from 4 V to
1 mV is 1,000% of the new full-scale range. For a 16-bit device to settle
within 0.0015% (15 ppm or 1 LSB) of the ±200 mV full-scale range on
channel 1, the input circuitry must settle to within 0.000031% (0.31 ppm or
© National Instruments Corporation 4-7 NI 6232/6233 User Manual
Page 35

Chapter 4 Analog Input
1/50 LSB) of the ±10 V range. Some devices can take many microseconds
for the circuitry to settle this much.
To avoid this effect, you should arrange your channel scanning order so that
transitions from large to small input ranges are infrequent.
In general, you do not need this extra settling time when the PGIA is
switching from a small input range to a larger input range.
Insert Grounded Channel between Signal Channels
Another technique to improve settling time is to connect an input channel
to ground. Then insert this channel in the scan list between two of your
signal channels. The input range of the grounded channel should match the
input range of the signal after the grounded channel in the scan list.
Consider again the example above where a 4 V signal is connected to
channel 0 and a 1 mV signal is connected to channel 1. Suppose the input
range for channel 0 is –10 V to 10 V and the input range of channel 1 is
–200mV to 200mV.
You can connect channel 2 to AI GND (or you can use the internal ground
signal; refer to Internal Channels in the NI-DAQmx Help or the
LabVIEW 8.x Help). Set the input range of channel 2 to –200 mV to
200 mV to match channel 1. Then scan channels in the order: 0, 2, 1.
Inserting a grounded channel between signal channels improves settling
time because the NI-PGIA adjusts to the new input range setting faster
when the input is grounded.
Minimize Voltage Step between Adjacent Channels
When scanning between channels that have the same input range, the
settling time increases with the voltage step between the channels. If you
know the expected input range of your signals, you can group signals with
similar expected ranges together in your scan list.
For example, suppose all channels in a system use a –5 to 5 V input range.
The signals on channels 0, 2, and 4 vary between 4.3 V and 5 V. The signals
on channels 1, 3, and 5 vary between –4 V and 0 V. Scanning channels in
the order 0, 2, 4, 1, 3, 5 will produce more accurate results than scanning
channels in the order 0, 1, 2, 3, 4, 5.
NI 6232/6233 User Manual 4-8 ni.com
Page 36

Avoid Scanning Faster Than Necessary
Designing your system to scan at slower speeds gives the PGIA more time
to settle to a more accurate level. Here are two examples to consider.
Example 1
Averaging many AI samples can increase the accuracy of the reading by
decreasing noise effects. In general, the more points you average, the more
accurate the final result will be. However, you may choose to decrease the
number of points you average and slow down the scanning rate.
Suppose you want to sample 10 channels over a period of 20 ms and
average the results. You could acquire 500 points from each channel at a
scan rate of 250 kS/s. Another method would be to acquire 1,000 points
from each channel at a scan rate of 500 kS/s. Both methods take the same
amount of time. Doubling the number of samples averaged (from 500 to
1,000) decreases the effect of noise by a factor of 1.4 (the square root of 2).
However, doubling the number of samples (in this example) decreases the
time the PGIA has to settle from 4 µs to 2 µs. In some cases, the slower scan
rate system returns more accurate results.
Chapter 4 Analog Input
Example 2
If the time relationship between channels is not critical, you can sample
from the same channel multiple times and scan less frequently. For
example, suppose an application requires averaging 100 points from
channel 0 and averaging 100 points from channel 1. You could alternate
reading between channels—that is, read one point from channel 0, and then
one point from channel 1, and so on. You also could read all 100 points
from channel 0 then read 100 points from channel 1. The second method
switches between channels much less often and is affected much less by
settling time.
Analog Input Data Acquisition Methods
When performing analog input measurements, you either can perform
software-timed or hardware-timed acquisitions. Hardware-timed
acquisitions can be buffered or non-buffered.
Software-Timed Acquisitions
With a software-timed acquisition, software controls the rate of the
acquisition. Software sends a separate command to the hardware to initiate
© National Instruments Corporation 4-9 NI 6232/6233 User Manual
Page 37

Chapter 4 Analog Input
each ADC conversion. In NI-DAQmx, software-timed acquisitions are
referred to as having on-demand timing. Software-timed acquisitions are
also referred to as immediate or static acquisitions and are typically used
for reading a single sample of data.
Hardware-Timed Acquisitions
With hardware-timed acquisitions, a digital hardware signal
(ai/SampleClock) controls the rate of the acquisition. This signal can be
generated internally on your device or provided externally.
Hardware-timed acquisitions have several advantages over software-timed
acquisitions.
• The time between samples can be much shorter.
• The timing between samples is deterministic.
• Hardware-timed acquisitions can use hardware triggering.
Hardware-timed operations can be buffered or non-buffered. A buffer is a
temporary storage in computer memory for to-be-generated samples.
Buffered
In a buffered acquisition, data is moved from the onboard FIFO memory of
a DAQ device to a PC buffer using DMA or interrupts before it is
transferred to application memory. Buffered acquisitions typically allow
for much faster transfer rates than non-buffered acquisitions because data
is moved in large blocks, rather than one point at a time.
One property of buffered I/O operations is the sample mode. The sample
mode can be either finite or continuous.
Finite sample mode acquisition refers to the acquisition of a specific,
predetermined number of data samples. When the specified number of
samples has been written out, the generation stops. If you use a reference
trigger, you must use finite sample mode.
Continuous acquisition refers to the acquisition of an unspecified number
of samples. Instead of acquiring a set number of data samples and stopping,
a continuous acquisition continues until you stop the operation. Continuous
acquisition is also referred to as double-buffered or circular-buffered
acquisition.
If data cannot be transferred across the bus fast enough, the FIFO will
become full. New acquisitions will overwrite data in the FIFO before it can
NI 6232/6233 User Manual 4-10 ni.com
Page 38

be transferred to host memory. The device generates an error in this case.
With continuous operations, if the user program does not read data out of
the PC buffer fast enough to keep up with the data transfer, the buffer could
reach an overflow condition, causing an error to be generated.
Non-Buffered
In non-buffered acquisitions, data is read directly from the FIFO on the
device. Typically, hardware-timed, non-buffered operations are used to
read single samples with known time increments between them and good
latency.
Analog Input Triggering
Analog input supports three different triggering actions:
• Start trigger
• Reference trigger
• Pause trigger
Refer to the AI Start Trigger Signal, AI Reference Trigger Signal, and AI
Pause Trigger Signal sections for information on these triggers.
Chapter 4 Analog Input
A digital trigger can initiate these actions. NI 6232/6233 devices support
digital triggering, but do not support analog triggering.
Connecting Analog Voltage Input Signals
Table 4-4 summarizes the recommended input configuration for both types
of signal sources.
© National Instruments Corporation 4-11 NI 6232/6233 User Manual
Page 39

Chapter 4 Analog Input
Table 4-4. Analog Input Configuration
Floating Signal Sources (Not
Connected to Building Ground)
Ground-Referenced Signal Sources
Input
Differential
(DIFF)
Referenced
Single-Ended
(RSE)
Examples:
• Ungrounded thermocouples
• Signal conditioning with isolated
outputs
• Battery devices
Isolation
AI +
AI –
AI +
AI GND
+
–
AI GND
+
–
+
–
+
–
Barrier
Isolation
Barrier
Example:
• Plug-in instruments with
non-isolated outputs
Isolation
AI +
AI –
AI
AI GND
+
–
AI GND
+
–
+
–
+
–
Barrier
Isolation
Barrier
Refer to the Analog Input Ground-Reference Settings section for
descriptions of DIFF and RSE modes.
Types of Signal Sources
When configuring the input channels and making signal connections, first
determine whether the signal sources are floating or ground-referenced. For
isolated measurement products, the front ends are isolated from the
building ground system, breaking any electrical connection between the
NI 6232/6233 User Manual 4-12 ni.com
Page 40

two reference planes. Isolated front ends require a ground-reference point
to the signal that is being measured.
Floating Signal Sources
A floating signal source is not connected to the building ground system
(earth or chassis ground), but has an isolated ground-reference point. Some
examples of floating signal sources are outputs of transformers,
thermocouples, battery-powered devices, optical isolators, and isolation
amplifiers. An instrument or device that has an isolated output is a floating
signal source. You must connect the ground reference of a floating signal
to the AI ground of the device to establish a local or onboard reference for
the signal. Otherwise, the measured input signal varies as the source floats
outside the common-mode input range.
Ground-Referenced Signal Sources
A ground-referenced signal source is connected to the building system
ground (earth or chassis ground), so you must connect the ground-reference
to AI GND to establish a local or onboard reference to the signal.
Non-isolated outputs of instruments and devices that plug into the building
power system fall into this category.
Chapter 4 Analog Input
The difference in ground potential between an instrument and your PC
connected to the same building power system is typically between 1 and
100 mV, but the difference can be much higher if power distribution circuits
are improperly connected. If a grounded signal source is incorrectly
measured, this difference can appear as measurement error. The
NI 6232/6233 isolates the ground of the instrument from the PC to help
eliminate this error.
Differential Connection Considerations
A DIFF connection is one in which the AI signal has its own reference
signal or signal return path. These connections are available when the
selected channel is configured in DIFF input mode. The input signal is
connected to the positive input of the PGIA, and its reference signal, or
return, is connected to the negative input of the PGIA.
When you configure a channel for DIFF input, each signal uses two
multiplexer inputs—one for the signal and one for its reference signal.
© National Instruments Corporation 4-13 NI 6232/6233 User Manual
Page 41

Chapter 4 Analog Input
Use DIFF input connections for any channel that meets any of the following
conditions:
• The input signal is low level (less than 1 V).
• The leads connecting the signal to the device are greater than 3 m
(10 ft).
• The input signal requires a separate ground-reference point or return
signal.
• The signal leads travel through noisy environments.
DIFF signal connections reduce noise pickup and increase common-mode
noise rejection. DIFF signal connections also allow input signals to float
within the common-mode limits of the PGIA.
Differential Connections for Ground-Referenced Signal Sources
Figure 4-4 shows how to connect a ground-referenced signal source to a
channel on the device configured in DIFF mode.
AI +
Isolation
Ground-
Referenced
Signal
Source
Common-
Mode
Noise and
Ground
Potential
I/O Connector
+
V
s
–
AI –
+
V
cm
–
Input Multiplexers
AI GND
M Series Isolated Device Configured in DIFF Mode
Instrumentation
Amplifier
+
PGIA
–
V
m
+
Measured
Voltage
–
Barrier
Digital
Isolators
Figure 4-4. Differential Connections for Ground-Referenced Signal Sources
NI 6232/6233 User Manual 4-14 ni.com
Page 42

Chapter 4 Analog Input
With this type of connection, the PGIA rejects both the common-mode
noise in the signal and the ground potential difference between the signal
source and the device ground, shown as V
NI 6232/6233 Specifications for the usable range of V
in the figure. Refer to the
cm
.
cm
Common-Mode Signal Rejection Considerations
For signal sources that are already referenced to some ground point with
respect to the device, the PGIA can reject any voltage caused by ground
potential differences between the signal source and the device. In addition,
with DIFF input connections, the PGIA can reject common-mode noise
pickup in the leads connecting the signal sources to the device. The PGIA
can reject common-mode signals as long as AI+ and AI– (input signals) are
both within ±11 V of AI GND.
Differential Input Biasing
Figure 4-4 shows AI GND connected to the negative lead of the signal
source. If you do not connect AI GND, the source is not likely to remain
within the common-mode signal range of the PGIA due to the floating
source or the isolation barrier. The PGIA then saturates, causing erroneous
readings.
You must reference the source to AI GND. The easiest way to make this
reference is to connect the positive side of the signal to the positive input of
the PGIA and connect the negative side of the signal to AI GND as well as
to the negative input of the PGIA, without using resistors.
Differential Connections for Non-Referenced or Floating Signal Sources
Figure 4-5 shows how to connect a floating signal source to a channel
configured in DIFF mode.
© National Instruments Corporation 4-15 NI 6232/6233 User Manual
Page 43

Chapter 4 Analog Input
Floating
Signal
Source
+
V
s
–
AI +
AI –
Input Multiplexers
AI GND
Instrumentation
Amplifier
+
PGIA
–
V
m
+
Measured
Voltage
–
Isolation
Barrier
Digital
Isolators
I/O Connector
M Series Isolated Device Configured in DIFF Mode
Figure 4-5. Differential Connections for Floating Signal Sources
This figure shows AI GND connected to the ground reference point for the
floating signal source. If you do not connect AI GND, the source is not
likely to remain within the common-mode signal range of the PGIA due to
the floating source or the isolation barrier. The PGIA then saturates,
causing erroneous readings.
You must reference the source to AI GND. The easiest way to make this
reference is to connect the positive side of the signal to the positive input of
the PGIA and connect the negative side of the signal to AI GND as well as
to the negative input of the PGIA, without using resistors.
Single-Ended Connection Considerations
A single-ended connection is one in which the device AI signal is
referenced to a ground that it can share with other input signals. The input
NI 6232/6233 User Manual 4-16 ni.com
Page 44

Chapter 4 Analog Input
signal connects to the positive input of the PGIA, and the ground connects
to the negative input of the PGIA.
You should only use single-ended input connections if the input signal
meets the following conditions.
• The input signal is high-level (greater than 1 V).
• The leads connecting the signal to the device are less than 3 m (10 ft).
• The input signal can share a common reference point with other
signals.
DIFF input connections are recommended for greater signal integrity for
any input signal that does not meet the preceding conditions.
For single-ended measurements, there is one ground-reference point for all
analog input signals, but the reference ground plane is floating, requiring
the user to provide a reference ground. An isolated device protects users
against ground loops in their measurement, as well as allowing the user to
provide a reference ground that is not electrically connected to earth,
system, or building ground.
In the single-ended modes, more electrostatic and magnetic noise couples
into the signal connections than in DIFF configurations. The coupling is the
result of differences in the signal path. Magnetic coupling is proportional
to the area between the two signal conductors. Electrical coupling is a
function of how much the electric field differs between the two conductors.
Single-Ended Connections for Floating or Grounded Signal Sources
Figure 4-6 shows how to connect a floating or grounded signal source to a
channel configured for RSE mode.
© National Instruments Corporation 4-17 NI 6232/6233 User Manual
Page 45

Chapter 4 Analog Input
Floating or
Grounded
Signal
Source
V
cm
+
V
s
–
I/O Connector
Selected Channel in RSE or NRSE Configuration
Isolation
AI <0..
Input Multiplexers
AI GND
n
>
Programmable Gain
Instrumentation
Amplifier
+
–
PGIA
V
m
+
Measured
Voltage
–
Barrier
Digital
Isolators
Figure 4-6. Single-Ended Connections for Floating Signal Sources (RSE
Configuration)
Refer to the NI 6232/6233 Specifications for the usable range of Vcm.
Common-Mode Signal Rejection Considerations
For signal sources that are already referenced to some ground point with
respect to the device, the PGIA can reject any voltage caused by ground
potential differences between the signal source and the device. In addition,
with DIFF input connections, the PGIA can reject common-mode noise
pickup in the leads connecting the signal sources to the device. The PGIA
can reject common-mode signals as long as AI x (input signal) is within
±11 V of AI GND.
Field Wiring Considerations
Environmental noise can seriously affect the measurement accuracy of the
device if you do not take proper care when running signal wires between
signal sources and the device. The following recommendations apply
mainly to AI signal routing to the device, although they also apply to signal
routing in general.
Minimize noise pickup and maximize measurement accuracy by taking the
following precautions:
• Use DIFF AI connections to reject common-mode noise.
NI 6232/6233 User Manual 4-18 ni.com
Page 46

• Use individually shielded, twisted-pair wires to connect AI signals to
the device. With this type of wire, the signals attached to the positive
and negative input channels are twisted together and then covered with
a shield. You then connect this shield only at one point to the signal
source ground. This kind of connection is required for signals traveling
through areas with large magnetic fields or high electromagnetic
interference.
Refer to the NI Developer Zone document, Field Wiring and Noise
Considerations for Analog Signals, for more information. To access this
document, go to
ni.com/info and enter the info code rdfwn3.
Analog Input Timing Signals
In order to provide all of the timing functionality described throughout this
section, NI 6232/6233 devices have a flexible timing engine. Figure 4-7
summarizes all of the timing options provided by the analog input timing
engine. Also refer to the Clock Routing section of Chapter 10, Digital
Routing and Clock Generation.
Chapter 4 Analog Input
PFI, RTSI
PXI_STAR
20 MHz Timebase
100 kHz Timebase
PXI_CLK10
PFI, RTSI
PXI_STAR
ai/Sample
Clock
Timebase
ai/Convert
Clock
Timebase
n
Ctr
Programmable
Clock
Divider
Ctr
n
Programmable
Clock
Divider
Internal Output
SW Pulse
PFI, RTSI
PXI_STAR
Internal Output
ai/Sample
Clock
ai/Convert
Clock
Figure 4-7. Analog Input Timing Options
M Series devices use ai/SampleClock and ai/ConvertClock to perform
interval sampling. As Figure 4-8 shows, ai/SampleClock controls the
sample period, which is determined by the following equation:
© National Instruments Corporation 4-19 NI 6232/6233 User Manual
Page 47

Chapter 4 Analog Input
1/Sample Period = Sample Rate
Channel 0
Channel 1
Convert Period
Sample Period
Figure 4-8. Interval Sampling
ai/ConvertClock controls the Convert Period, which is determined by the
following equation:
1/Convert Period = Convert Rate
By default, the NI-DAQmx driver chooses the fastest Channel Clock rate
possible while still allowing extra time for adequate amplifier settling time.
At slower scan rates, 10 μs of delay is added to the fastest possible channel
conversion rate of the device, which is the same as the maximum scan rate,
to derive the Channel Clock.
As the scan rate increases, there eventually will not be enough time to have
a full 10 μs of additional delay time between channel conversions and to
finish acquiring all channels before the next edge of the Scan Clock. At this
point, NI-DAQmx uses round robin channel sampling, evenly dividing the
time between scans by the number of channels being acquired to obtain the
interchannel delay. In this case, you can calculate the Channel Clock by
multiplying the scan rate by the number of channels being acquired.
For example, the NI 623x M Series device has a maximum sampling rate of
250 kS/s. At a slower acquisition rate, such as 10 kHz with 2 channels, the
Convert Clock would be set to 71428.6 Hz. This rate is determined by
taking the fastest channel conversion rate for the device and adding 10 μs,
4 μs (1/250000) + 10 μs, which results in 14 μs or 71428.6 Hz.
When this calculation results in the sampling rate exceeding 35 kHz, there
is not enough time between samples to acquire both channels and still add
a 10 μs delay per channel, so the Convert Clock rate becomes the sampling
rate multiplied by the number of channels being acquired. For example, on
NI 6232/6233 User Manual 4-20 ni.com
Page 48

Chapter 4 Analog Input
the PCI-6220 M Series device, a sampling rate of 40 kHz for two channels
would result in a Convert Clock rate of 80 kHz.
Maximum settling time for the amplifier is also very important. For
example, to ensure accuracy to within ± 1 LSB on an NI 623x M Series
device, the device requires a minimum amplifier settling time of 6 μs even
though the maximum channel conversion rate is 4 μs. Higher source
impedance also increases amplifier settling time.
Note The sampling rate is the fastest you can acquire data on the device and still achieve
accurate results. For example, if an M Series device has a sampling rate of 250 kS/s, this
sampling rate is aggregate—one channel at 250 kS/s or two channels at 125 kS/s per
channel illustrates the relationship.
Posttriggered data acquisition allows you to view only data that is acquired
after a trigger event is received. A typical posttriggered DAQ sequence is
shown in Figure 4-9. In this example, the DAQ device reads two channels
five times. The sample counter is loaded with the specified number of
posttrigger samples, in this example, five. The value decrements with each
pulse on ai/SampleClock, until the value reaches zero and all desired
samples have been acquired.
ai/StartTrigger
ai/SampleClock
ai/ConvertClock
Sample Counter
Figure 4-9. Posttriggered Data Acquisition Example
13042
Pretriggered data acquisition allows you to view data that is acquired before
the trigger of interest, in addition to data acquired after the trigger.
Figure 4-10 shows a typical pretriggered DAQ sequence. ai/StartTrigger
can be either a hardware or software signal. If ai/StartTrigger is set up to be
a software start trigger, an output pulse appears on the ai/StartTrigger line
when the acquisition begins. When the ai/StartTrigger pulse occurs, the
sample counter is loaded with the number of pretriggered samples, in this
example, four. The value decrements with each pulse on ai/SampleClock,
until the value reaches zero. The sample counter is then loaded with the
number of posttriggered samples, in this example, three.
© National Instruments Corporation 4-21 NI 6232/6233 User Manual
Page 49

Chapter 4 Analog Input
ai/StartTrigger
ai/ReferenceTrigger
ai/SampleClock
ai/ConvertClock
Scan Counter
Figure 4-10. Pretriggered Data Acquisition Example
n/a
0123 10222
If an ai/ReferenceTrigger pulse occurs before the specified number of
pretrigger samples are acquired, the trigger pulse is ignored. Otherwise,
when the ai/ReferenceTrigger pulse occurs, the sample counter value
decrements until the specified number of posttrigger samples have been
acquired.
NI 6232/6233 devices feature the following analog input timing signals.
• AI Sample Clock Signal
• AI Sample Clock Timebase Signal
• AI Convert Clock Signal
• AI Convert Clock Timebase Signal
• AI Hold Complete Event Signal
• AI Start Trigger Signal
• AI Reference Trigger Signal
• AI Pause Trigger Signal
AI Sample Clock Signal
Use the AI Sample Clock (ai/SampleClock) signal to initiate a set of
measurements. Your M Series device samples the AI signals of every
channel in the task once for every ai/SampleClock. A measurement
acquisition consists of one or more samples.
You can specify an internal or external source for ai/SampleClock. You also
can specify whether the measurement sample begins on the rising edge or
falling edge of ai/SampleClock.
NI 6232/6233 User Manual 4-22 ni.com
Page 50

Chapter 4 Analog Input
Using an Internal Source
One of the following internal signals can drive ai/SampleClock.
• Counter n Internal Output
• AI Sample Clock Timebase (divided down)
•A software pulse
A programmable internal counter divides down the sample clock timebase.
Several other internal signals can be routed to ai/SampleClock through
RTS I . Refer t o Device Routing in MAX in the NI-DAQmx Help or the
LabVIEW 8.x Help for more information.
Using an External Source
Use one of the following external signals as the source of ai/SampleClock:
• Input PFI <0..5>
•RTSI <0..7>
•PXI_STAR
Routing AI Sample Clock Signal to an Output Terminal
You can route ai/SampleClock out to any output PFI <6..9> or RTSI <0..7>
terminal. This pulse is always active high.
You can specify the output to have one of two behaviors. With the pulse
behavior, your DAQ device briefly pulses the PFI terminal once for every
occurrence of ai/SampleClock.
With level behavior, your DAQ device drives the PFI terminal high during
the entire sample.
PFI <0..5> terminals are fixed inputs. PFI <6..9> terminals are fixed
outputs.
Other Timing Requirements
Your DAQ device only acquires data during an acquisition. The device
ignores ai/SampleClock when a measurement acquisition is not in progress.
During a measurement acquisition, you can cause your DAQ device to
ignore ai/SampleClock using the ai/PauseTrigger signal.
© National Instruments Corporation 4-23 NI 6232/6233 User Manual
Page 51

Chapter 4 Analog Input
A counter on your device internally generates ai/SampleClock unless you
select some external source. ai/StartTrigger starts this counter and either
software or hardware can stop it when a finite acquisition completes. When
using an internally generated ai/SampleClock, you also can specify a
configurable delay from ai/StartTrigger to the first ai/SampleClock pulse.
By default, this delay is set to two ticks of the ai/SampleClockTimebase
signal. When using an externally generated ai/SampleClock, you must
ensure the clock signal is consistent with respect to the timing requirements
of ai/ConvertClock. Failure to do so may result in ai/SampleClock pulses
that are masked off and acquisitions with erratic sampling intervals. Refer
to the AI Convert Clock Signal section for more information on the timing
requirements between ai/ConvertClock and ai/SampleClock.
Figure 4-11 shows the relationship of ai/SampleClock to ai/StartTrigger.
ai/SampleClockTimebase
ai/StartTrigger
ai/SampleClock
Delay
From
Start
Trigger
Figure 4-11. ai/SampleClock and ai/StartTrigger
AI Sample Clock Timebase Signal
You can route any of the following signals to be the AI Sample Clock
Timebase (ai/SampleClockTimebase) signal:
• 20 MHz Timebase
• 100 kHz Timebase
•PXI_CLK10
•RTSI <0..7>
• Input PFI <0..5>
•PXI_STAR
ai/SampleClockTimebase is not available as an output on the I/O connector.
ai/SampleClockTimebase is divided down to provide one of the possible
NI 6232/6233 User Manual 4-24 ni.com
Page 52

sources for ai/SampleClock. You can configure the polarity selection for
ai/SampleClockTimebase as either rising or falling edge.
AI Convert Clock Signal
Use the AI Convert Clock (ai/ConvertClock) signal to initiate a single A/D
conversion on a single channel. A sample, controlled by the AI Sample
Clock, consists of one or more conversions.
You can specify either an internal or external signal as the source of
ai/ConvertClock. You also can specify whether the measurement sample
begins on the rising edge or falling edge of ai/ConvertClock.
With NI-DAQmx, the driver will choose the fastest conversion rate possible
based on the speed of the A/D converter and add 10 µs of padding between
each channel to allow for adequate settling time. This scheme enables the
channels to approximate simultaneous sampling and still allow for
adequate settling time. If the AI Sample Clock rate is too fast to allow for
this 10 µs of padding, NI-DAQmx will choose the conversion rate so that
the AI Convert Clock pulses are evenly spaced throughout the sample.
To explicitly specify the conversion rate, use the AI Convert Clock Rate
DAQmx Timing property node or function.
Chapter 4 Analog Input
Caution Setting the conversion rate higher than the maximum rate specified for your
device will result in errors.
Using an Internal Source
One of the following internal signals can drive ai/ConvertClock:
• AI Convert Clock Timebase (divided down)
• Counter n Internal Output
A programmable internal counter divides down the AI Convert Clock
Timebase to generate ai/ConvertClock. The counter is started by
ai/SampleClock and continues to count down to zero, produces an
ai/ConvertClock, reloads itself, and repeats the process until the sample is
finished. It then reloads itself in preparation for the next ai/SampleClock
pulse.
© National Instruments Corporation 4-25 NI 6232/6233 User Manual
Page 53

Chapter 4 Analog Input
Using an External Source
Use one of the following external signals as the source of ai/ConvertClock:
• Input PFI <0..5>
•RTSI <0..7>
•PXI_STAR
Routing AI Convert Clock Signal to an Output Terminal
You can route ai/ConvertClock (as an active low signal) out to any output
PFI <6..9> or RTSI <0..7> terminal.
PFI <0..5> terminals are fixed inputs. PFI <6..9> terminals are fixed
outputs.
Using a Delay from Sample Clock to Convert Clock
When using an internally generated ai/ConvertClock, you also can specify
a configurable delay from ai/SampleClock to the first ai/ConvertClock
pulse within the sample. By default, this delay is three ticks of
ai/ConvertClockTimebase.
Figure 4-12 shows the relationship of ai/SampleClock to ai/ConvertClock.
ai/ConvertClockTimebase
ai/SampleClock
ai/ConvertClock
Delay
From
Sample
Clock
NI 6232/6233 User Manual 4-26 ni.com
Convert
Perio d
Figure 4-12. ai/SampleClock and ai/ConvertClock
Page 54

Chapter 4 Analog Input
Other Timing Requirements
The sample and conversion level timing of M Series devices work such that
clock signals are gated off unless the proper timing requirements are met.
For example, the device ignores both ai/SampleClock and ai/ConvertClock
until it receives a valid ai/StartTrigger signal. When the device recognizes
an ai/SampleClock pulse, it ignores subsequent ai/SampleClock pulses
until it receives the correct number of ai/ConvertClock pulses.
Similarly, the device ignores all ai/ConvertClock pulses until it recognizes
an ai/SampleClock pulse. When the device receives the correct number of
ai/ConvertClock pulses, it ignores subsequent ai/ConvertClock pulses until
it receives another ai/SampleClock. Figure 4-13 shows timing sequences
for a four-channel acquisition (using AI channels 0, 1, 2, and 3) and
demonstrates proper and improper sequencing of ai/SampleClock and
ai/ConvertClock.
It is also possible to use a single external signal to drive both
ai/SampleClock and ai/ConvertClock at the same time. In this mode, each
tick of the external clock will cause a conversion on the ADC. Figure 4-13
shows this timing relationship.
ai/SampleClock
ai/ConvertClock
Channel Measured
One External Signal Driving Both Clocks
Figure 4-13. Single External Signal Driving ai/SampleClock and ai/ConvertClock
1 2 3 0
Sample #1 Sample #2 Sample #3
Simultaneously
1 2 3 0 1 … 0
AI Convert Clock Timebase Signal
The AI Convert Clock Timebase (ai/ConvertClockTimebase) signal is
divided down to provide on of the possible sources for ai/ConvertClock.
Use one of the following signals as the source of
ai/ConvertClockTimebase:
• ai/SampleClockTimebase
• 20 MHz Timebase
© National Instruments Corporation 4-27 NI 6232/6233 User Manual
Page 55

Chapter 4 Analog Input
ai/ConvertClockTimebase is not available as an output on the I/O
connector.
AI Hold Complete Event Signal
The AI Hold Complete Event (ai/HoldCompleteEvent) signal generates a
pulse after each A/D conversion begins. You can route
ai/HoldCompleteEvent out to any output PFI <6..9> or RTSI <0..7>
terminal.
The polarity of ai/HoldCompleteEvent is software-selectable, but is
typically configured so that a low-to-high leading edge can clock external
AI multiplexers indicating when the input signal has been sampled and can
be removed.
AI Start Trigger Signal
Use the AI Start Trigger (ai/StartTrigger) signal to begin a measurement
acquisition. A measurement acquisition consists of one or more samples. If
you do not use triggers, begin a measurement with a software command.
When the acquisition begins, configure the acquisition to stop under the
following conditions:
• When a certain number of points are sampled (in finite mode)
• After a hardware reference trigger (in finite mode)
• With a software command (in continuous mode)
An acquisition that uses a start trigger (but not a reference trigger) is
sometimes referred to as a posttriggered acquisition.
Using a Digital Source
To use ai/StartTrigger with a digital source, specify a source and an edge.
The source can be any of the following signals:
• Input PFI <0..5>
•RTSI <0..7>
• Counter n Internal Output
•PXI_STAR
The source also can be one of several other internal signals on your DAQ
device. Refer to Device Routing in MAX in the NI-DAQmx Help or the
LabVIEW 8.x Help for more information.
NI 6232/6233 User Manual 4-28 ni.com
Page 56

You also can specify whether the measurement acquisition begins on the
rising edge or falling edge of ai/StartTrigger.
Routing AI Start Trigger to an Output Terminal
You can route ai/StartTrigger out to any output PFI <6..9> or RTSI <0..7>
terminal.
The output is an active high pulse.
The device also uses ai/StartTrigger to initiate pretriggered DAQ
operations. In most pretriggered applications, a software trigger generates
ai/StartTrigger. Refer to the AI Reference Trigger Signal section for a
complete description of the use of ai/StartTrigger and ai/ReferenceTrigger
in a pretriggered DAQ operation.
AI Reference Trigger Signal
Use a reference trigger (ai/ReferenceTrigger) signal to stop a measurement
acquisition. To use a reference trigger, specify a buffer of finite size and a
number of pretrigger samples (samples that occur before the reference
trigger). The number of posttrigger samples (samples that occur after the
reference trigger) desired is the buffer size minus the number of pretrigger
samples.
Chapter 4 Analog Input
When the acquisition begins, the DAQ device writes samples to the buffer.
After the DAQ device captures the specified number of pretrigger samples,
the DAQ device begins to look for the reference trigger condition. If the
reference trigger condition occurs before the DAQ device captures the
specified number of pretrigger samples, the DAQ device ignores the
condition.
If the buffer becomes full, the DAQ device continuously discards the oldest
samples in the buffer to make space for the next sample. This data can be
accessed (with some limitations) before the DAQ device discards it. Refer
to the KnowledgeBase document, Can a Pretriggered Acquisition be
Continuous?, for more information. To access this KnowledgeBase, go to
ni.com/info and enter the info code rdcanq.
When the reference trigger occurs, the DAQ device continues to write
samples to the buffer until the buffer contains the number of posttrigger
samples desired. Figure 4-14 shows the final buffer.
© National Instruments Corporation 4-29 NI 6232/6233 User Manual
Page 57

Chapter 4 Analog Input
Reference Trigger
Pretrigger Samples
Complete Buffer
Figure 4-14. Reference Trigger Final Buffer
Posttrigger Samples
Using a Digital Source
To use ai/ReferenceTrigger with a digital source, specify a source and an
edge. The source can be any of the following signals:
• Input PFI <0..5>
•RTSI <0..7>
•PXI_STAR
The source also can be one of several internal signals on your DAQ device.
Refer to Device Routing in MAX in the NI-DAQmx Help or the
LabVIEW 8.x Help for more information.
You also can specify whether the measurement acquisition stops on the
rising edge or falling edge of ai/ReferenceTrigger.
Routing AI Reference Trigger Signal to an Output Terminal
You can route ai/ReferenceTrigger out to any output PFI <6..9> or
RTSI <0..7> terminal.
AI Pause Trigger Signal
You can use the AI Pause Trigger (ai/PauseTrigger) signal to pause and
resume a measurement acquisition. The internal sample clock pauses while
the external trigger signal is active and resumes when the signal is inactive.
You can program the active level of the pause trigger to be high or low.
NI 6232/6233 User Manual 4-30 ni.com
Page 58

Chapter 4 Analog Input
Using a Digital Source
To use ai/SampleClock, specify a source and a polarity. The source can be
any of the following signals:
• Input PFI <0..5>
•RTSI <0..7>
•PXI_STAR
The source also can be one of several other internal signals on your DAQ
device. Refer to Device Routing in MAX in the NI-DAQmx Help or the
LabVIEW 8.x Help for more information.
Routing AI Pause Trigger Signal to an Output Terminal
You can route ai/PauseTrigger out to RTSI <0..7>.
Note Pause triggers are only sensitive to the level of the source, not the edge.
Getting Started with AI Applications in Software
You can use the M Series device in the following analog input applications.
• Single-point analog input
• Finite analog input
• Continuous analog input
You can perform these applications through DMA, interrupt, or
programmed I/O data transfer mechanisms. Some of the applications also
use start, reference, and pause triggers.
Note For more information about programming analog input applications and triggers in
software, refer to the NI-DAQmx Help or the LabVIEW 8.x Help.
© National Instruments Corporation 4-31 NI 6232/6233 User Manual
Page 59

Analog Output
NI 6232/6233 devices have two AO channels that are controlled by a single
clock and are capable of waveform generation.
Figure 5-1 shows the analog output circuitry of NI 6232/6233 devices.
5
Isolation
Barrier
AO 0
AO 1
DAC0
DAC1
Analog Output Circuitry
DACs
Digital-to-analog converters (DACs) convert digital codes to analog
voltages.
AO FIFO
The AO FIFO enables analog output waveform generation. It is a
first-in-first-out (FIFO) memory buffer between the computer and the
Digital
Isolators
Figure 5-1. NI 6232/6233 Analog Output Circuitry
AO FIFO
AO Data
AO Sample Clock
© National Instruments Corporation 5-1 NI 6232/6233 User Manual
Page 60

Chapter 5 Analog Output
DACs. It allows you to download the points of a waveform to your M Series
device without host computer interaction.
AO Sample Clock
The AO Sample Clock signal reads a sample from the DAC FIFO and
generates the AO voltage.
Isolation Barrier and Digital Isolators
The digital isolators across the isolation barrier provide a ground break
between the isolated analog front end and the earth/chassis/building
ground.
Minimizing Glitches on the Output Signal
When you use a DAC to generate a waveform, you may observe glitches on
the output signal. These glitches are normal; when a DAC switches from
one voltage to another, it produces glitches due to released charges (usually
worst at mid-scale transitions). The largest glitches occur when the most
significant bit of the DAC code changes. You can build a lowpass
deglitching filter to remove some of these glitches, depending on the
frequency and nature of the output signal. Visit
information on minimizing glitches.
ni.com/support for more
Analog Output Data Generation Methods
When performing an analog output operation, you either can perform
software-timed or hardware-timed generations. Hardware-timed
generations can be non-buffered or buffered.
Software-Timed Generations
With a software-timed generation, software controls the rate at which data
is generated. Software sends a separate command to the hardware to initiate
each DAC conversion. In NI-DAQmx, software-timed generations are
referred to as on-demand timing. Software-timed generations are also
referred to as immediate or static operations. They are typically used for
writing a single value out, such as a constant DC voltage.
NI 6232/6233 User Manual 5-2 ni.com
Page 61

Hardware-Timed Generations
With a hardware-timed generation, a digital hardware signal controls the
rate of the generation. This signal can be generated internally on your
device or provided externally.
Hardware-timed generations have several advantages over software-timed
acquisitions:
• The time between samples can be much shorter.
• The timing between samples can be deterministic.
• Hardware-timed acquisitions can use hardware triggering.
Hardware-timed operations can be buffered or non-buffered. A buffer is a
temporary storage in computer memory for to-be-generated samples.
Non-Buffered
In non-buffered acquisitions, data is written directly to the DACs on the
device. Typically, hardware-timed, non-buffered operations are used to
write single samples with known time increments between them and good
latency.
Chapter 5 Analog Output
Buffered
In a buffered acquisition, data is moved from a PC buffer to the onboard
FIFO of the DAQ device using DMA or interrupts before it is written to the
DACs one sample at a time. Buffered acquisitions typically allow for much
faster transfer rates than non-buffered acquisitions because data is moved
in large blocks, rather than one point at a time.
One property of buffered I/O operations is the sample mode. The sample
mode can be either finite or continuous.
Finite sample mode generation refers to the generation of a specific,
predetermined number of data samples. When the specified number of
samples has been written out, the generation stops.
Continuous generation refers to the generation of an unspecified number of
samples. Instead of generating a set number of data samples and stopping,
a continuous generation continues until you stop the operation. There are
several different methods of continuous generation that control what data is
written. These methods are regeneration, FIFO regeneration, and
non-regeneration modes.
© National Instruments Corporation 5-3 NI 6232/6233 User Manual
Page 62

Chapter 5 Analog Output
Regeneration is the repetition of the data that is already in the buffer.
Standard regeneration is when data from the PC buffer is continually
downloaded to the FIFO to be written out. New data can be written to the
PC buffer at any time without disrupting the output.
With FIFO regeneration, the entire buffer is downloaded to the FIFO and
regenerated from there. When the data is downloaded, new data cannot be
written to the FIFO. To use FIFO regeneration, the entire buffer must fit
within the FIFO size. The advantage of using FIFO regeneration is that it
does not require communication with the main host memory when the
operation is started, thereby preventing any problems that may occur due to
excessive bus traffic.
With non-regeneration, old data will not be repeated. New data must be
continually written to the buffer. If the program does not write new data to
the buffer at a fast enough rate to keep up with the generation, the buffer
will underflow and cause an error.
Analog Output Triggering
Analog output supports two different triggering actions:
• Start trigger
• Pause trigger
A digital trigger can initiate these actions. NI 6232/6233 devices support
digital triggering, but do not support analog triggering. Refer to the AO
Start Trigger Signal and AO Pause Trigger Signal sections for more
information on these triggering actions.
Connecting Analog Voltage Output Signals
AO <0..3> are the voltage output signals for AO channels 0, 1, 2, and 3.
AO GND is the ground reference for AO <0..3>.
Figure 5-2 shows how to make AO connections to the device.
NI 6232/6233 User Manual 5-4 ni.com
Page 63

Chapter 5 Analog Output
Load
Load
I/O Connector
V OUT
V OUT
+
–
–
+
AO 0
AO 1
AO GND
Channel 0
Channel 1
Digital
Isolators
Isolation
Barrier
Figure 5-2. Analog Output Connections
Analog Output Timing Signals
Figure 5-3 summarizes all of the timing options provided by the analog
output timing engine.
© National Instruments Corporation 5-5 NI 6232/6233 User Manual
Page 64

Chapter 5 Analog Output
PFI, RTSI
PFI, RTSI
PXI_STAR
20 MHz Timebase
100 kHz Timebase
PXI_CLK10
NI 6232/6233 devices feature the following AO (waveform generation)
timing signals.
• AO Start Trigger Signal
• AO Pause Trigger Signal
• AO Sample Clock Signal
• AO Sample Clock Timebase Signal
AO Start Trigger Signal
Use the AO Start Trigger (ao/StartTrigger) signal to initiate a waveform
generation. If you do not use triggers, you can begin a generation with a
software command.
ao/Sample
Clock
Timebase
PXI_STAR
n
Internal Output
Ctr
Programmable
Clock
Divider
Figure 5-3. Analog Output Timing Options
ao/Sample
Clock
Using a Digital Source
To use ao/StartTrigger, specify a source and an edge. The source can be one
of the following signals:
•A software pulse
• Input PFI <0..5>
•RTSI<0..7>
• ai/ReferenceTrigger
• ai/StartTrigger
•PXI_STAR
NI 6232/6233 User Manual 5-6 ni.com
Page 65

The source also can be one of several internal signals on your DAQ device.
Refer to Device Routing in MAX in the NI-DAQmx Help or the
LabVIEW 8.x Help for more information.
You also can specify whether the waveform generation begins on the rising
edge or falling edge of ao/StartTrigger.
Routing AO Start Trigger Signal to an Output Terminal
You can route ao/StartTrigger out to any output PFI <6..9> or RTSI <0..7>
terminal.
The output is an active high pulse.
PFI <0..5> terminals are fixed inputs. PFI <6..9> terminals are fixed
outputs.
AO Pause Trigger Signal
Use the AO Pause Trigger signal (ao/PauseTrigger) to mask off samples in
a DAQ sequence. That is, when ao/PauseTrigger is active, no samples
occur.
Chapter 5 Analog Output
ao/PauseTrigger does not stop a sample that is in progress. The pause does
not take effect until the beginning of the next sample.
When you generate analog output signals, the generation pauses as soon as
the pause trigger is asserted. If the source of your sample clock is the
onboard clock, the generation resumes as soon as the pause trigger is
deasserted, as shown in Figure 5-4.
Pause Trigger
Sample Clock
Figure 5-4. ao/PauseTrigger with the Onboard Clock Source
If you are using any signal other than the onboard clock as the source of
your sample clock, the generation resumes as soon as the pause trigger is
© National Instruments Corporation 5-7 NI 6232/6233 User Manual
Page 66

Chapter 5 Analog Output
deasserted and another edge of the sample clock is received, as shown in
Figure 5-5.
Pause Trigger
Sample Clock
Figure 5-5. ao/PauseTrigger with Other Signal Source
Using a Digital Source
To use ao/PauseTrigger, specify a source and a polarity. The source can be
one of the following signals:
• Input PFI <0..5>
•RTSI<0..7>
•PXI_STAR
The source also can be one of several other internal signals on your DAQ
device. Refer to Device Routing in MAX in the NI-DAQmx Help or the
LabVIEW 8.x Help for more information.
You also can specify whether the samples are paused when ao/PauseTrigger
is at a logic high or low level.
Routing AO Pause Trigger Signal to an Output Terminal
You can route ao/PauseTrigger out to RTSI <0..7>.
AO Sample Clock Signal
Use the AO Sample Clock (ao/SampleClock) signal to initiate AO samples.
Each sample updates the outputs of all of the DACs. You can specify an
internal or external source for ao/SampleClock. You also can specify
whether the DAC update begins on the rising edge or falling edge of
ao/SampleClock.
NI 6232/6233 User Manual 5-8 ni.com
Page 67

Chapter 5 Analog Output
Using an Internal Source
One of the following internal signals can drive ao/SampleClock.
• AO Sample Clock Timebase (divided down)
• Counter n Internal Output
A programmable internal counter divides down the AO Sample Clock
Timebase signal.
Using an External Source
Use one of the following external signals as the source of ao/SampleClock:
• Input PFI <0..5>
•RTSI<0..7>
•PXI_STAR
Routing AO Sample Clock Signal to an Output Terminal
You can route ao/SampleClock (as an active low signal) out to any output
PFI <6..9> or RTSI <0..7> terminal.
Other Timing Requirements
A counter on your device internally generates ao/SampleClock unless you
select some external source. ao/StartTrigger starts the counter and either the
software or hardware can stop it when a finite generation completes. When
using an internally generated ao/SampleClock, you also can specify a
configurable delay from ao/StartTrigger to the first ao/SampleClock pulse.
By default, this delay is two ticks of ao/SampleClockTimebase.
Figure 5-6 shows the relationship of ao/SampleClock to ao/StartTrigger.
© National Instruments Corporation 5-9 NI 6232/6233 User Manual
Page 68

Chapter 5 Analog Output
ao/SampleClockTimebase
ao/SampleClock
Figure 5-6. ao/SampleClock and ao/StartTrigger
AO Sample Clock Timebase Signal
The AO Sample Clock Timebase (ao/SampleClockTimebase) signal is
divided down to provide a source for ao/SampleClock.
You can route any of the following signals to be the AO Sample Clock
Timebase (ao/SampleClockTimebase) signal:
•20MHzTimebase
• 100 kHz Timebase
•PXI_CLK10
• Input PFI <0..5>
•RTSI<0..7>
•PXI_STAR
ao/StartTrigger
Delay
From
Start
Trigger
ao/SampleClockTimebase is not available as an output on the I/O
connector.
You might use ao/SampleClockTimebase if you want to use an external
sample clock signal, but need to divide the signal down. If you want to use
an external sample clock signal but do not need to divide the signal, then
you should use ao/SampleClock rather than ao/SampleClockTimebase.
Getting Started with AO Applications in Software
You can use an M Series device in the following analog output applications.
• Single-point (on-demand) generation
NI 6232/6233 User Manual 5-10 ni.com
Page 69

Chapter 5 Analog Output
• Finite generation
• Continuous generation
• Waveform generation
You can perform these generations through programmed I/O, interrupt, or
DMA data transfer mechanisms. Some of the applications also use start
triggers and pause triggers.
Note For more information about programming analog output applications and triggers in
software, refer to the NI-DAQmx Help or the LabVIEW 8.x Help.
© National Instruments Corporation 5-11 NI 6232/6233 User Manual
Page 70

Digital Input and Output
NI 6232/6233 devices have six static digital input lines, P0.<0..5>. These
lines also can be used as PFI inputs.
The voltage input and output levels and the current drive level of the DI and
DO lines are listed in the NI 6232/6233 Specifications. Refer to Chapter 8,
PFI, for more information on PFI inputs and outputs.
I/O Protection
Each DI, DO, and PFI signal is protected against ESD events on
NI 6232/6233 devices. Consult the device specifications for details.
However, you should avoid these fault conditions by following these
guidelines.
•Do not connect any digital output line to any external signal source,
ground signal, or power supply.
• Understand the current requirements of the load connected to the
digital output lines. Do not exceed the specified current output limits
of the digital outputs. NI has several signal conditioning solutions for
digital applications requiring high current drive.
•Do not drive the digital input lines with voltages or current outside of
its normal operating range.
• Treat the DAQ device as you would treat any static sensitive device.
Always properly ground yourself and the equipment when handling the
DAQ device or connecting to it.
6
Programmable Power-Up States
By default, the digital output lines (P1.<0..3>/PFI <6..9>) are set to 0. They
can be programmed to power up as 0 or 1.
Refer to the NI-DAQmx Help or the LabVIEW 8.x Help for more
information about setting power-up states in NI-DAQmx or MAX.
© National Instruments Corporation 6-1 NI 6232/6233 User Manual
Page 71

Chapter 6 Digital Input and Output
Connecting Digital I/O Signals
The DI signals P0.<0..5> are referenced to P0.GND and DO signals
P1.<0..3> are referenced to P1.GND.
Figures 6-1 and 6-2 show P0.<0..5> and P1.<0..3> on the NI 6232 and the
NI 6233 device, respectively. Digital input and output signals can range
from 0 to 30 V. Refer to the NI 6232/6233 Specifications for more
information.
P1.VCC
P1.0
P1.<0..3>
P1.1
P1.GND
Digital
Isolators
P1.GND
P0.0
P0.GND
P0.GND
Figure 6-1. NI 6232 Digital I/O Connections (DO Source)
NI 6232/6233 User Manual 6-2 ni.com
Page 72

P1.VCC
Chapter 6 Digital Input and Output
P1.0
P1.GND
P1.1
P1.GND
P0.0
P0.GND
Buffer
P1.<0..3>
Digital
Isolators
P1.GND
P0.GND
Figure 6-2. NI 6233 Digital I/O Connections (DO Sink)
Caution Exceeding the maximum input voltage or maximum working voltage ratings,
which are listed in the NI 6232/6233 Specifications, can damage the DAQ device and the
computer. NI is not liable for any damage resulting from such signal connections.
Logic Conventions
With NI 6232/6233 devices, logic “0” means that the Darlington output
switch is open, while logic “1” means closed. Table 6-1 summarizes the
expected behavior.
© National Instruments Corporation 6-3 NI 6232/6233 User Manual
Page 73

Chapter 6 Digital Input and Output
Table 6-1. NI 6232/6233 Logic Conventions
Device Logic
0 1
NI 6232 (Source) DO P1.GND P1.VCC
NI 6233 (Sink) DO P1.VCC P1.GND
Getting Started with DIO Applications in Software
You can use NI 6232/6233 devices in the following digital I/O applications:
• Static digital input
• Static digital output
Note For more information about programming digital I/O applications and triggers in
software, refer to the NI-DAQmx Help or the LabVIEW 8.x Help.
NI 6232/6233 User Manual 6-4 ni.com
Page 74

Counters
Caution When making measurements, take into account the minimum pulse width and
time delay of the digital input and output lines. Refer to the NI 6238/6239 Specifications
for more information.
7
NI 6232/6233 devices have two general-purpose 32-bit counter/timers and
one frequency generator, as shown in Figure 7-1. The general-purpose
counter/timers can be used for many measurement and pulse generation
applications.
© National Instruments Corporation 7-1 NI 6232/6233 User Manual
Page 75

Chapter 7 Counters
Input Selection Muxes
Input Selection Muxes
Counter 0
Counter 0 Source (Counter 0 Timebase)
Counter 0 Gate
Counter 0 Aux
Counter 0 HW Arm
Counter 0 A
Counter 0 B (Counter 0 Up_Down)
Counter 0 Z
Counter 1 Source (Counter 1 Timebase)
Counter 1 Gate
Counter 1 Aux
Counter 1 HW Arm
Counter 1 A
Counter 1 B (Counter 1 Up_Down)
Counter 1 Z
Counter 0 Internal Output
Counter 1
Counter 0 Internal Output
Counter 0 TC
Counter 0 TC
Input Selection Muxes
Frequency Output Timebase Freq Out
Frequency Generator
Figure 7-1. M Series Counters
The counters have seven input signals, although in most applications only
a few inputs are used.
For information on connecting counter signals, refer to the Default Counter
Terminals section.
NI 6232/6233 User Manual 7-2 ni.com
Page 76

Counter Input Applications
Counting Edges
In edge counting applications, the counter counts edges on its Source after
the counter is armed. You can configure the counter to count rising or
falling edges on its Source input. You also can control the direction of
counting (up or down).
The counter values can be read on demand or with a sample clock.
Single Point (On-Demand) Edge Counting
With single point (on-demand) edge counting, the counter counts the
number of edges on the Source input after the counter is armed. On-demand
refers to the fact that software can read the counter contents at any time
without disturbing the counting process. Figure 7-2 shows an example of
single point edge counting.
Chapter 7 Counters
Counter Armed
SOURCE
Counter Value 105432
Figure 7-2. Single Point (On-Demand) Edge Counting
You also can use a pause trigger to pause (or gate) the counter. When the
pause trigger is active, the counter ignores edges on its Source input. When
the pause trigger is inactive, the counter counts edges normally.
You can route the pause trigger to the Gate input of the counter. You can
configure the counter to pause counting when the pause trigger is high or
when it is low. Figure 7-3 shows an example of on-demand edge counting
with a pause trigger.
© National Instruments Corporation 7-3 NI 6232/6233 User Manual
Page 77

Chapter 7 Counters
Counter Armed
Pause Trigger
(Pause When Low)
SOURCE
Counter Value
100 5432
Figure 7-3. Single Point (On-Demand) Edge Counting with Pause Trigger
Buffered (Sample Clock) Edge Counting
With buffered edge counting (edge counting using a sample clock), the
counter counts the number of edges on the Source input after the counter is
armed. The value of the counter is sampled on each active edge of a sample
clock. A DMA controller transfers the sampled values to host memory.
The count values returned are the cumulative counts since the counter
armed event. That is, the sample clock does not reset the counter.
You can route the counter sample clock to the Gate input of the counter. You
can configure the counter to sample on the rising or falling edge of the
sample clock.
Figure 7-4 shows an example of buffered edge counting. Notice that
counting begins when the counter is armed, which occurs before the first
active edge on Gate.
Counter Armed
(Sample on Rising Edge)
Sample Clock
SOURCE
Counter Value
Buffer
10763452
3
3
6
Figure 7-4. Buffered (Sample Clock) Edge Counting
NI 6232/6233 User Manual 7-4 ni.com
Page 78

Non-Cumulative Buffered Edge Counting
Non-cumulative edge counting is similar to buffered (sample clock) edge
counting. However, the counter resets after each active edge of the Sample
Clock. You can route the Sample Clock to the Gate input of the counter.
Figure 7-5 shows an example of non-cumulative buffered edge counting.
Sample Clock
(Sample on Rising Edge)
SOURCE
Chapter 7 Counters
Counter
Armed
Counter Value
Buffer
Figure 7-5. Non-Cumulative Buffered Edge Counting
1101331222
2232
3
3
Notice that the first count interval begins when the counter is armed, which
occurs before the first active edge on Gate.
Notice that if you are using an external signal as the Source, at least one
Source pulse should occur between each active edge of the Gate signal.
This condition ensures that correct values are returned by the counter. If this
condition is not met, consider using duplicate count prevention.
Controlling the Direction of Counting
In edge counting applications, the counter can count up or down. You can
configure the counter to do the following.
• Always count up
• Always count down
• Count up when the Counter n B input is high; count down when it is
low
For information on connecting counter signals, refer to the Default Counter
Terminals section.
© National Instruments Corporation 7-5 NI 6232/6233 User Manual
Page 79

Chapter 7 Counters
Pulse-Width Measurement
In pulse-width measurements, the counter measures the width of a pulse on
its Gate input signal. You can configure the counter to measure the width of
high pulses or low pulses on the Gate signal.
You can route an internal or external periodic clock signal (with a known
period) to the Source input of the counter. The counter counts the number
of rising (or falling) edges on the Source signal while the pulse on the Gate
signal is active.
You can calculate the pulse width by multiplying the period of the Source
signal by the number of edges returned by the counter.
A pulse-width measurement will be accurate even if the counter is armed
while a pulse train is in progress. If a counter is armed while the pulse is in
the active state, it will wait for the next transition to the active state to begin
the measurement.
Single Pulse-Width Measurement
With single pulse-width measurement, the counter counts the number of
edges on the Source input while the Gate input remains active. When the
Gate input goes inactive, the counter stores the count in a hardware save
register and ignores other edges on the Gate and Source inputs. Software
then can read the stored count.
Figure 7-6 shows an example of a single pulse-width measurement.
GATE
SOURCE
10
Counter Value
HW Save Register
Figure 7-6. Single Pulse-Width Measurement
NI 6232/6233 User Manual 7-6 ni.com
2
2
Page 80

GATE
SOURCE
Chapter 7 Counters
Buffered Pulse-Width Measurement
Buffered pulse-width measurement is similar to single pulse-width
measurement, but buffered pulse-width measurement takes measurements
over multiple pulses.
The counter counts the number of edges on the Source input while the Gate
input remains active. On each trailing edge of the Gate signal, the counter
stores the count in a hardware save register. A DMA controller transfers the
stored values to host memory.
Figure 7-7 shows an example of a buffered pulse-width measurement.
Counter Value
Buffer
Note that if you are using an external signal as the Source, at least one
Source pulse should occur between each active edge of the Gate signal.
This condition ensures that correct values are returned by the counter. If this
condition is not met, consider using duplicate count prevention.
For information on connecting counter signals, refer to the Default Counter
Terminals section.
Period Measurement
In period measurements, the counter measures a period on its Gate input
signal after the counter is armed. You can configure the counter to measure
the period between two rising edges or two falling edges of the Gate input
signal.
You can route an internal or external periodic clock signal (with a known
period) to the Source input of the counter. The counter counts the number
103
Figure 7-7. Buffered Pulse-Width Measurement
33
3
212
2
2
© National Instruments Corporation 7-7 NI 6232/6233 User Manual
Page 81

Chapter 7 Counters
of rising (or falling) edges occurring on the Source input between the two
active edges of the Gate signal.
You can calculate the period of the Gate input by multiplying the period of
the Source signal by the number of edges returned by the counter.
Single Period Measurement
With single period measurement, the counter counts the number of rising
(or falling) edges on the Source input occurring between two active edges
of the Gate input. On the second active edge of the Gate input, the counter
stores the count in a hardware save register and ignores other edges on the
Gate and Source inputs. Software then can read the stored count.
Figure 7-8 shows an example of a single period measurement.
GATE
SOURCE
Counter Value
HW Save Register
103
2
Figure 7-8. Single Period Measurement
4
5
5
Buffered Period Measurement
Buffered period measurement is similar to single period measurement, but
buffered period measurement measures multiple periods.
The counter counts the number of rising (or falling) edges on the Source
input between each pair of active edges on the Gate input. At the end of
each period on the Gate signal, the counter stores the count in a hardware
save register. A DMA controller transfers the stored values to host memory.
The counter begins when it is armed. The arm usually occurs in the middle
of a period of the Gate input. So the first value stored in the hardware save
register does not reflect a full period of the Gate input. In most applications,
this first point should be discarded.
Figure 7-9 shows an example of a buffered period measurement.
NI 6232/6233 User Manual 7-8 ni.com
Page 82

GATE
SOURCE
Counter Value
Buffer
Chapter 7 Counters
Counter Armed
112 3
2
(Discard) (Discard) (Discard)
2
Figure 7-9. Buffered Period Measurement
32
2
3
311
2
3
2
3
3
Note that if you are using an external signal as the Source, at least one
Source pulse should occur between each active edge of the Gate signal.
This condition ensures that correct values are returned by the counter. If this
condition is not met, consider using duplicate count prevention.
For information on connecting counter signals, refer to the Default Counter
Terminals section.
Semi-Period Measurement
In semi-period measurements, the counter measures a semi-period on its
Gate input signal after the counter is armed. A semi-period is the time
between any two consecutive edges on the Gate input.
You can route an internal or external periodic clock signal (with a known
period) to the Source input of the counter. The counter counts the number
of rising (or falling) edges occurring on the Source input between two
edges of the Gate signal.
You can calculate the semi-period of the Gate input by multiplying the
period of the Source signal by the number of edges returned by the counter.
Single Semi-Period Measurement
Single semi-period measurement is equivalent to single pulse-width
measurement.
© National Instruments Corporation 7-9 NI 6232/6233 User Manual
Page 83

Chapter 7 Counters
Buffered Semi-Period Measurement
In buffered semi-period measurement, on each edge of the Gate signal, the
counter stores the count in a hardware save register. A DMA controller
transfers the stored values to host memory.
The counter begins counting when it is armed. The arm usually occurs
between edges on the Gate input. So the first value stored in the hardware
save register does not reflect a full semi-period of the Gate input. In most
applications, this first point should be discarded.
Figure 7-10 shows an example of a buffered semi-period measurement.
Counter Armed
GATE
SOURCE
Note that if you are using an external signal as the Source, at least one
Source pulse should occur between each active edge of the Gate signal.
This condition ensures that correct values are returned by the counter. If this
condition is not met, consider using duplicate count prevention.
For information on connecting counter signals, refer to the Default Counter
Terminals section.
Frequency Measurement
You can use the counters to measure frequency in several different ways.
You can choose one of the following methods depending on your
application.
Method 1—Measure Low Frequency with One
Counter
In this method, you measure one period of your signal using a known
timebase. This method is good for low frequency signals.
Counter Value
Buffer
Figure 7-10. Buffered Semi-Period Measurement
13
2
11
12102
2
3
2
2
132
2
2
3
3
1
1
2
NI 6232/6233 User Manual 7-10 ni.com
Page 84

Chapter 7 Counters
You can route the signal to measure (F1) to the Gate of a counter. You can
route a known timebase (Ft) to the Source of the counter. The known
timebase can be 80MHzTimebase. For signals that might be slower than
0.02 Hz, use a slower known timebase.
You can configure the counter to measure one period of the gate signal. The
frequency of F1 is the inverse of the period. Figure 7-11 illustrates this
method.
Interval Measured
F1
Ft
Gate
Source
Single Period
Measurement
Method 1b—Measure Low Frequency with One
Counter (Averaged)
In this method, you measure several periods of your signal using a known
timebase. This method is good for low to medium frequency signals.
You can route the signal to measure (F1) to the Gate of a counter. You can
route a known timebase (Ft) to the Source of the counter. The known
timebase can be 80MHzTimebase. For signals that might be slower than
0.02 Hz, use a slower known timebase.
You can configure the counter to make K + 1 buffered period
measurements. Recall that the first period measurement in the buffer should
be discarded.
F1
Ft
123…
Period of F1 =
Frequency of F1 =
Figure 7-11. Method 1
N
Ft
…
Ft
N
N
Average the remaining K period measurements to determine the average
period of F1. The frequency of F1 is the inverse of the average period.
Figure 7-12 illustrates this method.
© National Instruments Corporation 7-11 NI 6232/6233 User Manual
Page 85

Chapter 7 Counters
Intervals Measured
T
T
1
2
…T
K
F1
Ft
Gate
Source
Buffered Period
Measurement
F1
2 ...
N
1... ...
1
1
Ft
Average Period of F1 =
Frequency of F1 =
N
N
… 1... ...
2
N
+
1
K × Ft
+
N
+ …
1
2
N
K
N
+ …
N
2
K
N
K
1
K
×
Ft
Figure 7-12. Method 1b
Method 2—Measure High Frequency with Two
Counters
In this method, you measure one pulse of a known width using your signal
and derive the frequency of your signal from the result. This method is good
for high frequency signals.
In this method, you route a pulse of known duration (T) to the Gate of a
counter. You can generate the pulse using a second counter. You also can
generate the pulse externally and connect it to a PFI or RTSI terminal. You
only need to use one counter if you generate the pulse externally.
Route the signal to measure (F1) to the Source of the counter. Configure the
counter for a single pulse-width measurement. Suppose you measure the
width of pulse T to be N periods of F1. Then the frequency of F1 is N/T.
Figure 7-13 illustrates this method. Another option would be to measure
the width of a known period instead of a known pulse.
NI 6232/6233 User Manual 7-12 ni.com
Page 86

Width of Pulse (T)
Chapter 7 Counters
Pulse
F1
Pulse
Gate
N
N
T
Source
Pulse-Width
Measurement
F1
12…
Width of
Frequency of F1 =
Pulse
T =
N
F1
Figure 7-13. Method 2
Method 3—Measure Large Range of Frequencies
Using Two Counters
By using two counters, you can accurately measure a signal that might be
high or low frequency. This technique is called reciprocal frequency
measurement. In this method, you generate a long pulse using the signal to
measure. You then measure the long pulse with a known timebase. The
M Series device can measure this long pulse more accurately than the faster
input signal.
You can route the signal to measure to the Source input of Counter 0, as
shown in Figure 7-14. Assume this signal to measure has frequency F1.
Configure Counter 0 to generate a single pulse that is the width of N periods
of the source input signal.
© National Instruments Corporation 7-13 NI 6232/6233 User Manual
Page 87

Chapter 7 Counters
Signal to
Measure (F1)
Signal of Known
Frequency (F2)
CTR_0_SOURCE
(Signal to Measure)
CTR_0_OUT
(CTR_1_GATE)
CTR_1_SOURCE
SOURCE OUT
COUNTER 0
SOURCE
COUNTER 1
GATE
0123…
Interval
to Measure
N
OUT
Figure 7-14. Method 3
Then route the Counter 0 Internal Output signal to the Gate input of
Counter 1. You can route a signal of known frequency (F2) to the Counter
1 Source input. F2 can be 80MHzTimebase. For signals that might be
slower than 0.02 Hz, use a slower known timebase. Configure Counter 1 to
perform a single pulse-width measurement. Suppose the result is that the
pulse width is J periods of the F2 clock.
From Counter 0, the length of the pulse is N/F1. From Counter 1, the length
of the same pulse is J/F2. Therefore, the frequency of F1 is given by
F1 = F2 * (N/J).
Choosing a Method for Measuring Frequency
The best method to measure frequency depends on several factors including
the expected frequency of the signal to measure, the desired accuracy, how
many counters are available, and how long the measurement can take.
• Method 1 uses only one counter. It is a good method for many
applications. However, the accuracy of the measurement decreases as
the frequency increases.
NI 6232/6233 User Manual 7-14 ni.com
Page 88

Chapter 7 Counters
Consider a frequency measurement on a 50 kHz signal using an
80 MHz Timebase. This frequency corresponds to 1600 cycles of the
80 MHz Timebase. Your measurement may return 1600 ±1 cycles
depending on the phase of the signal with respect to the timebase. As
your frequency becomes larger, this error of ±1 cycle becomes more
significant. Table 7-1 illustrates this point.
Table 7-1. Frequency Measurement Method 1
Tas k Equation Example 1 Example 2
Actual Frequency to Measure F1 50 kHz 5MHz
Timebase Frequency Ft 80 MHz 80 MHz
Actual Number of Timebase
Ft/F1 1600 16
Periods
Worst Case Measured Number of
(Ft/F1) – 1 1599 15
Timebase Periods
Measured Frequency Ft F1/(Ft – F1) 50.125 kHz 5.33 MHz
Error [Ft F1/(Ft – F1)] – F1 125 kHz 333 kHz
Error % [Ft/(Ft – F1)] – 1 0.06% 6.67%
• Method 1b (measuring K periods of F1) improves the accuracy of the
measurement. A disadvantage of Method 1b is that you have to take
K + 1 measurements. These measurements take more time and
consume some of the available PCI or PXI bandwidth.
• Method 2 is accurate for high frequency signals. However, the
accuracy decreases as the frequency of the signal to measure
decreases. At very low frequencies, Method 2 may be too inaccurate
for your application. Another disadvantage of Method 2 is that it
requires two counters (if you cannot provide an external signal of
known width). An advantage of Method 2 is that the measurement
completes in a known amount of time.
• Method 3 measures high and low frequency signals accurately.
However, it requires two counters.
Table 7-2 summarizes some of the differences in methods of measuring
frequency.
© National Instruments Corporation 7-15 NI 6232/6233 User Manual
Page 89

Chapter 7 Counters
Table 7-2. Frequency Measurement Method Comparison
Number of
Method
1 1 1 Poor Good
1b 1 Many Fair Good
2 1 or 2 1 Good Poor
3 2 1 Good Good
Counters Used
For information on connecting counter signals, refer to the Default Counter
Terminals section.
Position Measurement
You can use the counters to perform position measurements with
quadrature encoders or two-pulse encoders. You can measure angular
position with X1, X2, and X4 angular encoders. Linear position can be
measured with two-pulse encoders. You can choose to do either a single
point (on-demand) position measurement or a buffered (sample clock)
position measurement. You must arm a counter to begin position
measurements.
Number of
Measurements
Returned
Measures High
Frequency
Signals
Accurately
Measures Low
Frequency
Signals
Accurately
Measurements Using Quadrature Encoders
The counters can perform measurements of quadrature encoders that use
X1, X2, or X4 encoding.
A quadrature encoder can have up to three channels—channels A, B, and Z.
X1 Encoding
When channel A leads channel B in a quadrature cycle, the counter
increments. When channel B leads channel A in a quadrature cycle, the
counter decrements. The amount of increments and decrements per cycle
depends on the type of encoding—X1, X2, or X4.
Figure 7-15 shows a quadrature cycle and the resulting increments and
decrements for X1 encoding. When channel A leads channel B, the
increment occurs on the rising edge of channel A. When channel B leads
channel A, the decrement occurs on the falling edge of channel A.
NI 6232/6233 User Manual 7-16 ni.com
Page 90

Ch A
Ch B
Chapter 7 Counters
Counter Value
5
6
7
7
6
5
Figure 7-15. X1 Encoding
X2 Encoding
The same behavior holds for X2 encoding except the counter increments or
decrements on each edge of channel A, depending on which channel leads
the other. Each cycle results in two increments or decrements, as shown in
Figure 7-16.
Ch A
Ch B
Counter Value
56 8
7
Figure 7-16. X2 Encoding
9
9
7
8
6
5
X4 Encoding
Similarly, the counter increments or decrements on each edge of
channels A and B for X4 encoding. Whether the counter increments or
decrements depends on which channel leads the other. Each cycle results in
four increments or decrements, as shown in Figure 7-17.
Ch A
Ch B
Counter Value 5 6 8 9 10 1011 1112 1213 137
56879
Figure 7-17. X4 Encoding
Channel Z Behavior
Some quadrature encoders have a third channel, channel Z, which is also
referred to as the index channel. A high level on channel Z causes the
counter to be reloaded with a specified value in a specified phase of the
quadrature cycle. You can program this reload to occur in any one of the
four phases in a quadrature cycle.
© National Instruments Corporation 7-17 NI 6232/6233 User Manual
Page 91

Chapter 7 Counters
Channel Z behavior—when it goes high and how long it stays
high—differs with quadrature encoder designs. You must refer to the
documentation for your quadrature encoder to obtain timing of channel Z
with respect to channels A and B. You must then ensure that channel Z is
high during at least a portion of the phase you specify for reload. For
instance, in Figure 7-18, channel Z is never high when channel A is high
and channel B is low. Thus, the reload must occur in some other phase.
In Figure 7-18, the reload phase is when both channel A and channel B are
low. The reload occurs when this phase is true and channel Z is high.
Incrementing and decrementing takes priority over reloading. Thus, when
the channel B goes low to enter the reload phase, the increment occurs first.
The reload occurs within one maximum timebase period after the reload
phase becomes true. After the reload occurs, the counter continues to count
as before. Figure 7-18 illustrates channel Z reload with X4 decoding.
Ch A
Ch B
Ch Z
Max Timebase
Counter Value
56
Figure 7-18. Channel Z Reload with X4 Decoding
890 21743
A = 0
B = 0
Z = 1
Measurements Using Two Pulse Encoders
The counter supports two pulse encoders that have two channels—channels
A and B.
The counter increments on each rising edge of channel A. The counter
decrements on each rising edge of channel B, as shown in Figure 7-19.
Ch A
Ch B
Counter Value 2 3 54344
Figure 7-19. Measurements Using Two Pulse Encoders
NI 6232/6233 User Manual 7-18 ni.com
Page 92

For information on connecting counter signals, refer to the Default Counter
Terminals section.
Two-Signal Edge-Separation Measurement
Two-signal edge-separation measurement is similar to pulse-width
measurement, except that there are two measurement signals—Aux and
Gate. An active edge on the Aux input starts the counting and an active edge
on the Gate input stops the counting. You must arm a counter to begin a two
edge separation measurement.
After the counter has been armed and an active edge occurs on the Aux
input, the counter counts the number of rising (or falling) edges on the
Source. The counter ignores additional edges on the Aux input.
The counter stops counting upon receiving an active edge on the Gate input.
The counter stores the count in a hardware save register.
You can configure the rising or falling edge of the Aux input to be the active
edge. You can configure the rising or falling edge of the Gate input to be
the active edge.
Use this type of measurement to count events or measure the time that
occurs between edges on two signals. This type of measurement is
sometimes referred to as start/stop trigger measurement, second gate
measurement, or A-to-B measurement.
Chapter 7 Counters
Single Two-Signal Edge-Separation Measurement
With single two-signal edge-separation measurement, the counter counts
the number of rising (or falling) edges on the Source input occurring
between an active edge of the Gate signal and an active edge of the Aux
signal. The counter then stores the count in a hardware save register and
ignores other edges on its inputs. Software then can read the stored count.
Figure 7-20 shows an example of a single two-signal edge-separation
measurement.
© National Instruments Corporation 7-19 NI 6232/6233 User Manual
Page 93

Chapter 7 Counters
Counter
AUX
GATE
SOURCE
Counter Value
HW Save Register
Armed
0000123456788 8
Measured Interval
8
Figure 7-20. Single Two-Signal Edge-Separation Measurement
Buffered Two-Signal Edge-Separation Measurement
Buffered and single two-signal edge-separation measurements are similar,
but buffered measurement measures multiple intervals.
The counter counts the number of rising (or falling) edges on the Source
input occurring between an active edge of the Gate signal and an active
edge of the Aux signal. The counter then stores the count in a hardware save
register. On the next active edge of the Gate signal, the counter begins
another measurement. A DMA controller transfers the stored values to host
memory.
Figure 7-21 shows an example of a buffered two-signal edge-separation
measurement.
AUX
GATE
SOURCE
Counter Value
Buffer
123 123 123
3333
3
3
Figure 7-21. Buffered Two-Signal Edge-Separation Measurement
For information on connecting counter signals, refer to the Default Counter
Terminals section.
NI 6232/6233 User Manual 7-20 ni.com
Page 94

Counter Output Applications
Simple Pulse Generation
Single Pulse Generation
The counter can output a single pulse. The pulse appears on the Counter n
Internal Output signal of the counter.
You can specify a delay from when the counter is armed to the beginning
of the pulse. The delay is measured in terms of a number of active edges of
the Source input.
You can specify a pulse width. The pulse width is also measured in terms
of a number of active edges of the Source input. You also can specify the
active edge of the Source input (rising or falling).
Figure 7-22 shows a generation of a pulse with a pulse delay of four and a
pulse width of three (using the rising edge of Source).
Counter Armed
Chapter 7 Counters
SOURCE
OUT
Figure 7-22. Single Pulse Generation
Single Pulse Generation with Start Trigger
The counter can output a single pulse in response to one pulse on a
hardware Start Trigger signal. The pulse appears on the Counter n Internal
Output signal of the counter.
You can route the Start Trigger signal to the Gate input of the counter. You
can specify a delay from the Start Trigger to the beginning of the pulse. You
also can specify the pulse width. The delay and pulse width are measured
in terms of a number of active edges of the Source input.
After the Start Trigger signal pulses once, the counter ignores the Gate
input.
Figure 7-23 shows a generation of a pulse with a pulse delay of four and a
pulse width of three (using the rising edge of Source).
© National Instruments Corporation 7-21 NI 6232/6233 User Manual
Page 95

Chapter 7 Counters
GATE
(Start Trigger)
SOURCE
OUT
Figure 7-23. Single Pulse Generation with Start Trigger
Retriggerable Single Pulse Generation
The counter can output a single pulse in response to each pulse on a
hardware Start Trigger signal. The pulses appear on the Counter n Internal
Output signal of the counter.
You can route the Start Trigger signal to the Gate input of the counter. You
can specify a delay from the Start Trigger to the beginning of each pulse.
You also can specify the pulse width. The delay and pulse width are
measured in terms of a number of active edges of the Source input.
The counter ignores the Gate input while a pulse generation is in progress.
After the pulse generation is finished, the counter waits for another Start
Trigger signal to begin another pulse generation.
Figure 7-24 shows a generation of two pulses with a pulse delay of five and
a pulse width of three (using the rising edge of Source).
GATE
(Start Trigger)
SOURCE
OUT
Figure 7-24. Retriggerable Single Pulse Generation
For information on connecting counter signals, refer to the Default Counter
Terminals section.
NI 6232/6233 User Manual 7-22 ni.com
Page 96

Pulse Train Generation
Continuous Pulse Train Generation
This function generates a train of pulses with programmable frequency and
duty cycle. The pulses appear on the Counter n Internal Output signal of the
counter.
You can specify a delay from when the counter is armed to the beginning
of the pulse train. The delay is measured in terms of a number of active
edges of the Source input.
You specify the high and low pulse widths of the output signal. The pulse
widths are also measured in terms of a number of active edges of the Source
input. You also can specify the active edge of the Source input (rising or
falling).
The counter can begin the pulse train generation as soon as the counter is
armed, or in response to a hardware Start Trigger. You can route the Start
Trigger to the Gate input of the counter.
You also can use the Gate input of the counter as a Pause Trigger (if it is not
used as a Start Trigger). The counter pauses pulse generation when the
Pause Trigger is active.
Chapter 7 Counters
Figure 7-25 shows a continuous pulse train generation (using the rising
edge of Source).
SOURCE
OUT
Counter Armed
Figure 7-25. Continuous Pulse Train Generation
Continuous pulse train generation is sometimes called frequency division.
If the high and low pulse widths of the output signal are M and N periods,
then the frequency of the Counter n Internal Output signal is equal to the
frequency of the Source input divided by M + N.
For information on connecting counter signals, refer to the Default Counter
Terminals section.
© National Instruments Corporation 7-23 NI 6232/6233 User Manual
Page 97

Chapter 7 Counters
Frequency Generation
You can generate a frequency by using a counter in pulse train generation
mode or by using the frequency generator circuit.
Using the Frequency Generator
The frequency generator can output a square wave at many different
frequencies. The frequency generator is independent of the two
general-purpose 32-bit counter/timer modules on M Series devices.
Figure 7-26 shows a block diagram of the frequency generator.
20 MHz Timebase
100 kHz Timebase
÷ 2
Frequency
Output
Timebase
Frequency Generator
Divisor
(1–16)
Figure 7-26. Frequency Generator Block Diagram
Freq Out
The frequency generator generates the Frequency Output signal. The
Frequency Output signal is the Frequency Output Timebase divided by a
number you select from 1 to 16. The Frequency Output Timebase can be
either the 20 MHz Timebase divided by 2 or the 100 kHz Timebase.
The duty cycle of Frequency Output is 50% if the divider is either 1 or an
even number. For an odd divider, suppose the divider is set to D. In this
case, Frequency Output is low for (D + 1)/2 cycles and high for (D – 1)/2
cycles of the Frequency Output Timebase.
Figure 7-27 shows the output waveform of the frequency generator when
the divider is set to 5.
Frequency
Output
Timebase
Freq Out
(Divisor = 5)
Figure 7-27. Frequency Generator Output Waveform
NI 6232/6233 User Manual 7-24 ni.com
Page 98

Frequency Output can be routed out to any output PFI <6..9> or
RTSI <0..7> terminal. All PFI terminals are set to high-impedance at
startup.
In software, program the frequency generator as you would program one of
the counters for pulse train generation.
For information on connecting counter signals, refer to the Default Counter
Terminals section.
Frequency Division
The counters can generate a signal with a frequency that is a fraction of an
input signal. This function is equivalent to continuous pulse train
generation.
For information on connecting counter signals, refer to the Default Counter
Terminals section.
Pulse Generation for ETS
In this application, the counter produces a pulse on the output a specified
delay after an active edge on Gate. After each active edge on Gate, the
counter cumulatively increments the delay between the Gate and the pulse
on the output by a specified amount. Thus, the delay between the Gate and
the pulse produced successively increases.
Chapter 7 Counters
Note ETS = Equivalent Time Sampling.
The increase in the delay value can be between 0 and 255. For instance, if
you specify the increment to be 10, the delay between the active Gate edge
and the pulse on the output will increase by 10 every time a new pulse is
generated.
Suppose you program your counter to generate pulses with a delay of 100
and pulse width of 200 each time it receives a trigger. Furthermore, suppose
you specify the delay increment to be 10. On the first trigger, your pulse
delay will be 100, on the second it will be 110, on the third it will be 120;
the process will repeat in this manner until the counter is disarmed. The
counter ignores any Gate edge that is received while the pulse triggered by
the previous Gate edge is in progress.
The waveform thus produced at the output of the counter can be used to
provide timing for undersampling applications where a digitizing system
can sample repetitive waveforms that are higher in frequency than the
© National Instruments Corporation 7-25 NI 6232/6233 User Manual
Page 99

Chapter 7 Counters
Nyquist frequency of the system. Figure 7-28 shows an example of pulse
generation for ETS; the delay from the trigger to the pulse increases after
each subsequent Gate active edge.
GATE
OUT
For information on connecting counter signals, refer to the Default Counter
Terminals section.
Counter Timing Signals
M Series devices feature the following counter timing signals.
• Counter n Source
• Counter n Gate
• Counter n Aux
• Counter n A
• Counter n B
• Counter n Z
• Counter n Up_Down
• Counter n HW Arm
• Counter n Internal Output
• Counter n TC
•Frequency Output
D1 D2 = D1 + ΔDD3 = D1 + 2ΔD
Figure 7-28. Pulse Generation for ETS
In this section, n refers to either Counter 0 or 1. For example, Counter n
Source refers to two signals—Counter 0 Source (the source input to
Counter 0) and Counter 1 Source (the source input to Counter 1).
NI 6232/6233 User Manual 7-26 ni.com
Page 100

Counter n Source Signal
The selected edge of the Counter n Source signal increments and
decrements the counter value depending on the application the counter is
performing. Table 7-3 lists how this terminal is used in various
applications.
Pulse Generation Counter Timebase
One Counter Time Measurements Counter Timebase
Two Counter Time Measurements Input Terminal
Non-Buffered Edge Counting Input Terminal
Buffered Edge Counting Input Terminal
Two-Edge Separation Counter Timebase
Routing a Signal to Counter n Source
Each counter has independent input selectors for the Counter n Source
signal. Any of the following signals can be routed to the Counter n Source
input.
•80MHz Timebase
•20MHz Timebase
• 100 kHz Timebase
•RTSI<0..7>
• Input PFI <0..5>
•PXI_CLK10
•PXI_STAR
Chapter 7 Counters
Table 7-3. Counter Applications and Counter n Source
Application Purpose of Source Terminal
In addition, Counter 1 TC or Counter 1 Gate can be routed to
Counter 0 Source. Counter 0 TC or Counter 0 Gate can be routed to
Counter 1 Source.
Some of these options may not be available in some driver software.
© National Instruments Corporation 7-27 NI 6232/6233 User Manual
 Loading...
Loading...