

Page 1

NI MATRIXx
Xmath™ Control Design Module
Xmath Control Design Module
TM
April 2007
370753C-01
Page 2

Support
Worldwide Technical Support and Product Information
ni.com
National Instruments Corporate Headquarters
11500 North Mopac Expressway Austin, Texas 78759-3504 USA Tel: 512 683 0100
Worldwide Offices
Australia 1800 300 800, Austria 43 662 457990-0, Belgium 32 (0) 2 757 0020, Brazil 55 11 3262 3599,
Canada 800 433 3488, China 86 21 5050 9800, Czech Republic 420 224 235 774, Denmark 45 45 76 26 00,
Finland 385 (0) 9 725 72511, France 33 (0) 1 48 14 24 24, Germany 49 89 7413130, India 91 80 41190000,
Israel 972 3 6393737, Italy 39 02 413091, Japan 81 3 5472 2970, Korea 82 02 3451 3400,
Lebanon 961 (0) 1 33 28 28, Malaysia 1800 887710, Mexico 01 800 010 0793, Netherlands 31 (0) 348 433 466,
New Zealand 0800 553 322, Norway 47 (0) 66 90 76 60, Poland 48 22 3390150, Portugal 351 210 311 210,
Russia 7 495 783 6851, Singapore 1800 226 5886, Slovenia 386 3 425 42 00, South Africa 27 0 11 805 8197,
Spain 34 91 640 0085, Sweden 46 (0) 8 587 895 00, Switzerland 41 56 2005151, Taiwan 886 02 2377 2222,
Thailand 662 278 6777, Turkey 90 212 279 3031, United Kingdom 44 (0) 1635 523545
For further support information, refer to the Technical Support and Professional Services appendix. To comment
on National Instruments documentation, refer to the National Instruments Web site at ni.com/info and enter
the info code feedback.
© 2007 National Instruments Corporation. All rights reserved.
Page 3

Important Information
Warranty
TThe media on which you receive National Instruments software are warranted not to fail to execute programming instructions, due to defects
in materials and workmanship, for a period of 90 days from date of shipment, as evidenced by receipts or other documentation. National
Instruments will, at its option, repair or replace software media that do not execute programming instructions if National Instruments receives
notice of such defects during the warranty period. National Instruments does not warrant that the operation of the software shall be
uninterrupted or error free.
A Return Material Authorization (RMA) number must be obtained from the factory and clearly marked on the outside of the package before any
equipment will be accepted for warranty work. National Instruments will pay the shipping costs of returning to the owner parts which are covered by
warranty.
National Instruments believes that the information in this document is accurate. The document has been carefully reviewed for technical accuracy. In
the event that technical or typographical errors exist, National Instruments reserves the right to make changes to subsequent editions of this document
without prior notice to holders of this edition. The reader should consult National Instruments if errors are suspected. In no event shall National
Instruments be liable for any damages arising out of or related to this document or the information contained in it.
E
XCEPT AS SPECIFIED HEREIN, NATIONAL INSTRUMENTS MAKES NO WARRANTIES, EXPRESS OR IMPLIED, AND SPECIFICALLY DISCLAIMS ANY WARRANTY OF
MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE. CUSTOMER’S RIGHT TO RECOVER DAMAGES CAUSED BY FAULT OR NEGLIGENCE ON THE PART OF NATIONAL
I
NSTRUMENTS SHALL BE LIMITED TO THE AMOUNT THERETOFORE PAID BY THE CUSTOMER. NATIONAL INSTRUMENTS WILL NOT BE LIABLE FOR DAMAGES RESULTING
FROM LOSS OF DATA, PROFITS, USE OF PRODUCTS, OR INCIDENTAL OR CONSEQUENTIAL DAMAGES, EVEN IF ADVISED OF THE POSSIBILITY THEREOF. This limitation of
the liability of National Instruments will apply regardless of the form of action, whether in contract or tort, including negligence. Any action against
National Instruments must be brought within one year after the cause of action accrues. National Instruments shall not be liable for any delay in
performance due to causes beyond its reasonable control. The warranty provided herein does not cover damages, defects, malfunctions, or service
failures caused by owner’s failure to follow the National Instruments installation, operation, or maintenance instructions; owner’s modification of the
product; owner’s abuse, misuse, or negligent acts; and power failure or surges, fire, flood, accident, actions of third parties, or other events outside
reasonable control.
Copyright
Under the copyright laws, this publication may not be reproduced or transmitted in any form, electronic or mechanical, including photocopying,
recording, storing in an information retrieval system, or translating, in whole or in part, without the prior written consent of National
Instruments Corporation.
National Instruments respects the intellectual property of others, and we ask our users to do the same. NI software is protected by copyright and other
intellectual property laws. Where NI software may be used to reproduce software or other materials belonging to others, you may use NI software only
to reproduce materials that you may reproduce in accordance with the terms of any applicable license or other legal restriction.
Trademarks
MATRIXx™, National Instruments™, NI™, ni.com™, and Xmath™ are trademarks of National Instruments Corporation.
Other product and company names mentioned herein are trademarks or trade names of their respective companies.
Members of the National Instruments Alliance Partner Program are business entities independent from National Instruments and have no agency,
partnership, or joint-venture relationship with National Instruments.
Patents
For patents covering National Instruments products, refer to the appropriate location: Help»Patents in your software, the patents.txt file
on your CD, or
ni.com/patents.
WARNING REGARDING USE OF NATIONAL INSTRUMENTS PRODUCTS
(1) NATIONAL INSTRUMENTS PRODUCTS ARE NOT DESIGNED WITH COMPONENTS AND TESTING FOR A LEVEL OF
RELIABILITY SUITABLE FOR USE IN OR IN CONNECTION WITH SURGICAL IMPLANTS OR AS CRITICAL COMPONENTS IN
ANY LIFE SUPPORT SYSTEMS WHOSE FAILURE TO PERFORM CAN REASONABLY BE EXPECTED TO CAUSE SIGNIFICANT
INJURY TO A HUMAN.
(2) IN ANY APPLICATION, INCLUDING THE ABOVE, RELIABILITY OF OPERATION OF THE SOFTWARE PRODUCTS CAN BE
IMPAIRED BY ADVERSE FACTORS, INCLUDING BUT NOT LIMITED TO FLUCTUATIONS IN ELECTRICAL POWER SUPPLY,
COMPUTER HARDWARE MALFUNCTIONS, COMPUTER OPERATING SYSTEM SOFTWARE FITNESS, FITNESS OF COMPILERS
AND DEVELOPMENT SOFTWARE USED TO DEVELOP AN APPLICATION, INSTALLATION ERRORS, SOFTWARE AND HARDWARE
COMPATIBILITY PROBLEMS, MALFUNCTIONS OR FAILURES OF ELECTRONIC MONITORING OR CONTROL DEVICES,
TRANSIENT FAILURES OF ELECTRONIC SYSTEMS (HARDWARE AND/OR SOFTWARE), UNANTICIPATED USES OR MISUSES, OR
ERRORS ON THE PART OF THE USER OR APPLICATIONS DESIGNER (ADVERSE FACTORS SUCH AS THESE ARE HEREAFTER
COLLECTIVELY TERMED “SYSTEM FAILURES”). ANY APPLICATION WHERE A SYSTEM FAILURE WOULD CREATE A RISK OF
HARM TO PROPERTY OR PERSONS (INCLUDING THE RISK OF BODILY INJURY AND DEATH) SHOULD NOT BE RELIANT SOLELY
UPON ONE FORM OF ELECTRONIC SYSTEM DUE TO THE RISK OF SYSTEM FAILURE. TO AVOID DAMAGE, INJURY, OR DEATH,
THE USER OR APPLICATION DESIGNER MUST TAKE REASONABLY PRUDENT STEPS TO PROTECT AGAINST SYSTEM FAILURES,
INCLUDING BUT NOT LIMITED TO BACK-UP OR SHUT DOWN MECHANISMS. BECAUSE EACH END-USER SYSTEM IS
CUSTOMIZED AND DIFFERS FROM NATIONAL INSTRUMENTS' TESTING PLATFORMS AND BECAUSE A USER OR APPLICATION
DESIGNER MAY USE NATIONAL INSTRUMENTS PRODUCTS IN COMBINATION WITH OTHER PRODUCTS IN A MANNER NOT
EVALUATED OR CONTEMPLATED BY NATIONAL INSTRUMENTS, THE USER OR APPLICATION DESIGNER IS ULTIMATELY
RESPONSIBLE FOR VERIFYING AND VALIDATING THE SUITABILITY OF NATIONAL INSTRUMENTS PRODUCTS WHENEVER
NATIONAL INSTRUMENTS PRODUCTS ARE INCORPORATED IN A SYSTEM OR APPLICATION, INCLUDING, WITHOUT
LIMITATION, THE APPROPRIATE DESIGN, PROCESS AND SAFETY LEVEL OF SUCH SYSTEM OR APPLICATION.
Page 4
Conventions
The following conventions are used in this manual:
<> Angle brackets that contain numbers separated by an ellipsis represent a
range of values associated with a bit or signal name—for example,
DIO<3..0>.
[ ] Square brackets enclose optional items—for example, [
» The » symbol leads you through nested menu items and dialog box options
to a final action. The sequence File»Page Setup»Options directs you to
pull down the File menu, select the Page Setup item, and select Options
from the last dialog box.
This icon denotes a note, which alerts you to important information.
bold Bold text denotes items that you must select or click in the software, such
as menu items and dialog box options. Bold text also denotes parameter
names.
italic Italic text denotes variables, emphasis, a cross-reference, or an introduction
to a key concept. Italic text also denotes text that is a placeholder for a word
or value that you must supply.
monospace Text in this font denotes text or characters that you should enter from the
keyboard, sections of code, programming examples, and syntax examples.
This font is also used for the proper names of disk drives, paths, directories,
programs, subprograms, subroutines, device names, functions, operations,
variables, filenames, and extensions.
monospace italic
Italic text in this font denotes text that is a placeholder for a word or value
that you must supply.
response].
Page 5

Contents
Chapter 1
Introduction
Using This Manual.........................................................................................................1-1
Document Organization...................................................................................1-1
Bibliographic References ................................................................................1-2
Commonly Used Nomenclature ......................................................................1-2
Related Publications ........................................................................................1-3
MATRIXx Help...............................................................................................1-3
Control Design Tutorial .................................................................................................1-4
Helicopter Hover Problem: An Ad Hoc Approach .........................................1-4
Helicopter Hover Problem: State Feedback and Observer Design .................1-13
Helicopter Hover Problem: Discrete Formulation ..........................................1-18
Inverted Wedge-Balancing Problem: LQG Control........................................1-20
Chapter 2
Linear System Representation
Linear Systems Represented in Xmath..........................................................................2-1
Transfer Function System Models.................................................................................2-2
State-Space System Models...........................................................................................2-5
Basic System Building Functions....................................................................2-6
system( ) ..........................................................................................................2-6
abcd( )..............................................................................................................2-8
numden( ).........................................................................................................2-10
period( ) ...........................................................................................................2-10
names( ) ...........................................................................................................2-11
Size and Indexing of Dynamic Systems ........................................................................2-12
Using check( ) with System Objects..............................................................................2-12
Discretizing a System ....................................................................................................2-13
discretize( ) ......................................................................................................2-13
Numerical Integration Methods: forward, backward, tustins ........... 2-14
Pole-Zero Matching: polezero ..........................................................2-15
Z-Transform: ztransform...................................................................2-15
Hold Equivalence Methods: exponential and firstorder ...................2-15
makecontinuous( ) ...........................................................................................2-17
© National Instruments Corporation v Xmath Control Design Module
Page 6

Contents
Chapter 3
Building System Connections
Linear System Interconnection Operators ..................................................................... 3-1
Linear System Interconnection Functions ..................................................................... 3-4
afeedback( )..................................................................................................... 3-4
Algorithm.......................................................................................... 3-5
append( ) ......................................................................................................... 3-6
connect( ).........................................................................................................3-8
Algorithm.......................................................................................... 3-10
feedback( )....................................................................................................... 3-11
Algorithm.......................................................................................... 3-12
Chapter 4
System Analysis
Time-Domain Solution of System Equations................................................................ 4-1
System Stability: Poles and Zeros ................................................................................. 4-2
poles( )............................................................................................................. 4-3
zeros( )............................................................................................................. 4-3
Algorithm.......................................................................................... 4-5
Partial Fraction Expansion ............................................................................................4-5
residue( ) ......................................................................................................... 4-8
combinepf( ).................................................................................................... 4-9
General Time-Domain Simulation ................................................................................ 4-10
Impulse Response of a System ...................................................................................... 4-13
impulse( ) ........................................................................................................ 4-13
deftimerange( )................................................................................................ 4-15
System Response to Initial Conditions.......................................................................... 4-16
initial( )............................................................................................................ 4-16
Step Response................................................................................................................ 4-18
step( )............................................................................................................... 4-18
Chapter 5
Classical Feedback Analysis
Feedback Control of a Plant Model............................................................................... 5-1
Root Locus..................................................................................................................... 5-2
rlocus( ) ...........................................................................................................5-3
Frequency Response and Dynamic Response ............................................................... 5-5
freq( )............................................................................................................... 5-5
Algorithm.......................................................................................... 5-6
Xmath Control Design Module vi ni.com
Page 7

Bode Frequency Analysis ..............................................................................................5-7
bode( )..............................................................................................................5-10
margin( ) ..........................................................................................................5-12
nichols( )..........................................................................................................5-14
Nyquist Stability Analysis .............................................................................................5-15
nyquist( )..........................................................................................................5-16
Linear Systems and Power Spectral Density .................................................................5-20
psd( )................................................................................................................5-20
Chapter 6
State-Space Design
Controllability................................................................................................................6-1
controllable( ) ..................................................................................................6-3
Observability and Estimation.........................................................................................6-4
observable( ) ....................................................................................................6-6
Minimal Realizations.....................................................................................................6-7
minimal( ) ........................................................................................................6-8
stair( )...............................................................................................................6-9
Duality and Pole Placement...........................................................................................6-10
poleplace( ) ......................................................................................................6-10
Linear Quadratic Regulator ...........................................................................................6-12
regulator( ).......................................................................................................6-14
Linear Quadratic Estimator............................................................................................6-16
estimator( ).......................................................................................................6-20
Linear Quadratic Gaussian Compensation ....................................................................6-21
lqgcomp( ) .......................................................................................................6-23
Riccati Equation.............................................................................................................6-25
riccati( ) ...........................................................................................................6-26
Steady-State System Response Using Lyapunov Equations .........................................6-28
lyapunov( ).......................................................................................................6-30
rms( ) ...............................................................................................................6-32
Balancing a Linear System ............................................................................................6-33
balance( ) .........................................................................................................6-35
Modal Form of a System ...............................................................................................6-37
modal( ) ...........................................................................................................6-37
mreduce( )........................................................................................................6-38
Contents
Algorithm ..........................................................................................6-30
© National Instruments Corporation vii Xmath Control Design Module
Page 8

Contents
Appendix A
Technical References
Appendix B
Technical Support and Professional Services
Index
Xmath Control Design Module viii ni.com
Page 9
Introduction
The Control Design Module (CDM) is a complete library of classical and
modern control design functions that provides a flexible, intuitive control
design framework.
This chapter starts with an outline of the manual and some user notes. It
also contains a tutorial that presents several problems and uses a variety of
approaches to obtain solutions. The tutorial is designed to familiarize you
with many of the functions in this module.
Using This Manual
This manual provides an overview of different aspects of linear systems
analysis, describes the Xmath Control Design function library, and gives
examples of how you can use Xmath to solve problems rapidly. It also
explains how you can represent and analyze linear systems in Xmath and
provides a brief syntax listing and supplementary algorithm information for
each CDM function. Detailed descriptions of function inputs, outputs, and
behavior are provided in the Xmath Help.
1
Document Organization
This manual includes the following chapters:
• Chapter 1, Introduction, starts with an outline of the manual and some
user notes. It also contains a tutorial that presents several problems and
uses a variety of approaches to obtain solutions. The tutorial is
designed to familiarize you with many of the functions in this module.
• Chapter 2, Linear System Representation, describes the types of linear
systems that can be represented within Xmath. In addition, it discusses
the implementation of systems as objects–data structures
encompassing different information fields. The Xmath functions for
creating a system or extracting its components are part of the general
Xmath package and not exclusive to the Control Design Module, but
they are used so extensively that they warrant a detailed treatment here.
This chapter also discusses the functions you can use to check for
© National Instruments Corporation 1-1 Xmath Control Design Module
Page 10

Chapter 1 Introduction
particular system properties or to change the format of a system. These
topics include continuous/discrete system conversion, as well as
finding equivalent transfer function state-space representations.
• Chapter 3, Building System Connections, details Xmath functions that
perform different types of linear system interconnections. It also
discusses a number of simpler connections that have been
implemented as overloaded operators on system objects.
• Chapter 4, System Analysis, describes the Xmath functions relating to
system stability and time-domain analysis. These include poles, zeros,
and residue. The chapter moves from the discussion of time-domain
stability to time-domain system simulation. Xmath provides built-in
functions for obtaining impulse and step responses, as well as
examining system response to arbitrary initial conditions. In addition,
the General Time-Domain Simulation section discusses a
mathematically natural syntax for time-domain system simulation
with any input.
• Chapter 5, Classical Feedback Analysis, discusses topics pertaining
to classical feedback-based control design. These include root locus
techniques and functions for frequency-domain analysis of
closed-loop systems, given open-loop system descriptions.
• Chapter 6, State-Space Design, focuses on modern control. Beginning
with the topics of system controllability and observability, it covers
general pole placement, linear quadratic control, and system
balancing.
Bibliographic References
Throughout this document, bibliographic references are cited with
bracketed entries. For example, a reference to [DeS74] corresponds to
a document published by Desoer and Schulman in 1974. For a table of
bibliographic references, refer to Appendix A, Technical References.
Commonly Used Nomenclature
This manual uses the following general nomenclature:
• Matrix variables are generally denoted with capital letters; vectors are
represented in lowercase.
• G(s) is used to denote a transfer function of a system where s is the
Laplace variable. G(q) is used when both continuous and discrete
systems are allowed.
Xmath Control Design Module 1-2 ni.com
Page 11

• H(s) is used to denote the frequency response, over some range of
• A single apostrophe following a matrix variable, for example, x',
Related Publications
For a complete list of MATRIXx publications, refer to Chapter 2,
MATRIXx Publications, Online Help, and Customer Support, of the
MATRIXx Getting Started Guide. The following documents are particularly
useful for topics covered in this manual:
• MATRIXx Getting Started Guide
• Xmath User Guide
• Control Design Module
• Interactive Control Desing Module
• Interactive System Identification Module, Part 1
• Interactive System Identification Module, Part 2
• Model Reduction Module
• Optimization Module
• Robust Control Module
• Xμ Module
Chapter 1 Introduction
frequencies of a system where s is the Laplace variable. H(q) is used to
indicate that the system can be continuous or discrete.
denotes the transpose of that variable. An asterisk following a matrix
variable (for example, A*) indicates the complex conjugate, or
Hermitian, transpose of that variable.
MATRIXx Help
Control Design Module function reference information is available in the
MATRIXx Help. The MATRIXx Help includes all Control Design functions.
Each topic explains a function’s inputs, outputs, and keywords in detail.
Refer to Chapter 2, MATRIXx Publications, Online Help, and Customer
Support, of the MATRIXx Getting Started Guide for complete instructions
on using the Help feature.
© National Instruments Corporation 1-3 Xmath Control Design Module
Page 12

Chapter 1 Introduction
Control Design Tutorial
This tutorial illustrates the use of functions and commands provided in
Xmath and the Xmath Control Design Module to solve control problems.
The emphasis of the tutorial is on using a number of different approaches,
not on any one “correct” way to solve a problem. It demonstrates the
flexibility of Xmath’s tools and scripting language to customize your
analysis in a way that is as straightforward and mathematically intuitive as
possible.
The models in this tutorial are adapted from the studies in [ShH92], of the
equations presented in [FPE87], for the longitudinal motion of a helicopter
near hover, and in [HW91], for the inverted-wedge-balancing problem.
Helicopter Hover Problem: An Ad Hoc Approach
[FPE87] gives this state-space model for the longitudinal motion of the
helicopter:
·
q
·
θ
·
v
0.4– 00.01–
10 0
1.4– 9.8 0.02–
q
6.3
0
9.8
δ+=
θ
v
y
=
001qθ
v
letting the state variables q, θ, and v represent the helicopter’s pitch rate,
pitch angle, and horizontal velocity, respectively. The input control to the
system is the rotor tilt angle, δ.
You can store the information that this model provides in an Xmath
state-space system object:
A = [-0.4,0,-0.01;1,0,0;-1.4,9.8,-0.02];
B = [6.3;0;9.8];
C = [0,0,1];
D = 0;
ssys = system(A,B,C,D,
{inputNames ="Rotor Angle",
outputNames="Horizontal v",
stateNames =["Pitch Rate", "Pitch Angle",
"Horizontal v"]})
Xmath Control Design Module 1-4 ni.com
Page 13

Chapter 1 Introduction
ssys (a state space system) =
A
-0.4 0 -0.01
1 0 0
-1.4 9.8 -0.02
B
6.3
0
9.8
C
0 0 1
D
0
X0
0
0
0
State Names
-----------
Pitch Rate Pitch Angle Horizontal v
Input Names
-----------
Rotor Angle
Output Names
------------
Horizontal v
System is continuous
Use check( ) to convert the model to transfer-function form:
[,Gs] = check(ssys,{tf,convert})
Gs (a transfer function) =
2
9.8(s - 0.5s + 6.3)
-----------------------------------------
2
(s + 0.656513)(s - 0.236513s + 0.149274)
initial integrator outputs
0
0
0
© National Instruments Corporation 1-5 Xmath Control Design Module
Page 14
Chapter 1 Introduction
Input Names
----------Rotor Angle
Output Names
-----------Horizontal v
System is continuous
The system has poles and zeros in the right half of the complex plane and
therefore is open-loop unstable. Checking the pole and zero locations
confirms this:
ol_poles=poles(ssys)
ol_poles (a column vector) =
0.118256 - 0.367817 j
0.118256 + 0.367817 j
-0.656513
ol_zeros=zeros(ssys)
ol_zeros (a column vector) =
0.25 + 2.4975 j
0.25 - 2.4975 j
Try to stabilize the system using feedback compensation. You have two
major performance goals to achieve through your controller design: first,
the system must be closed-loop stable, and second, you want the system
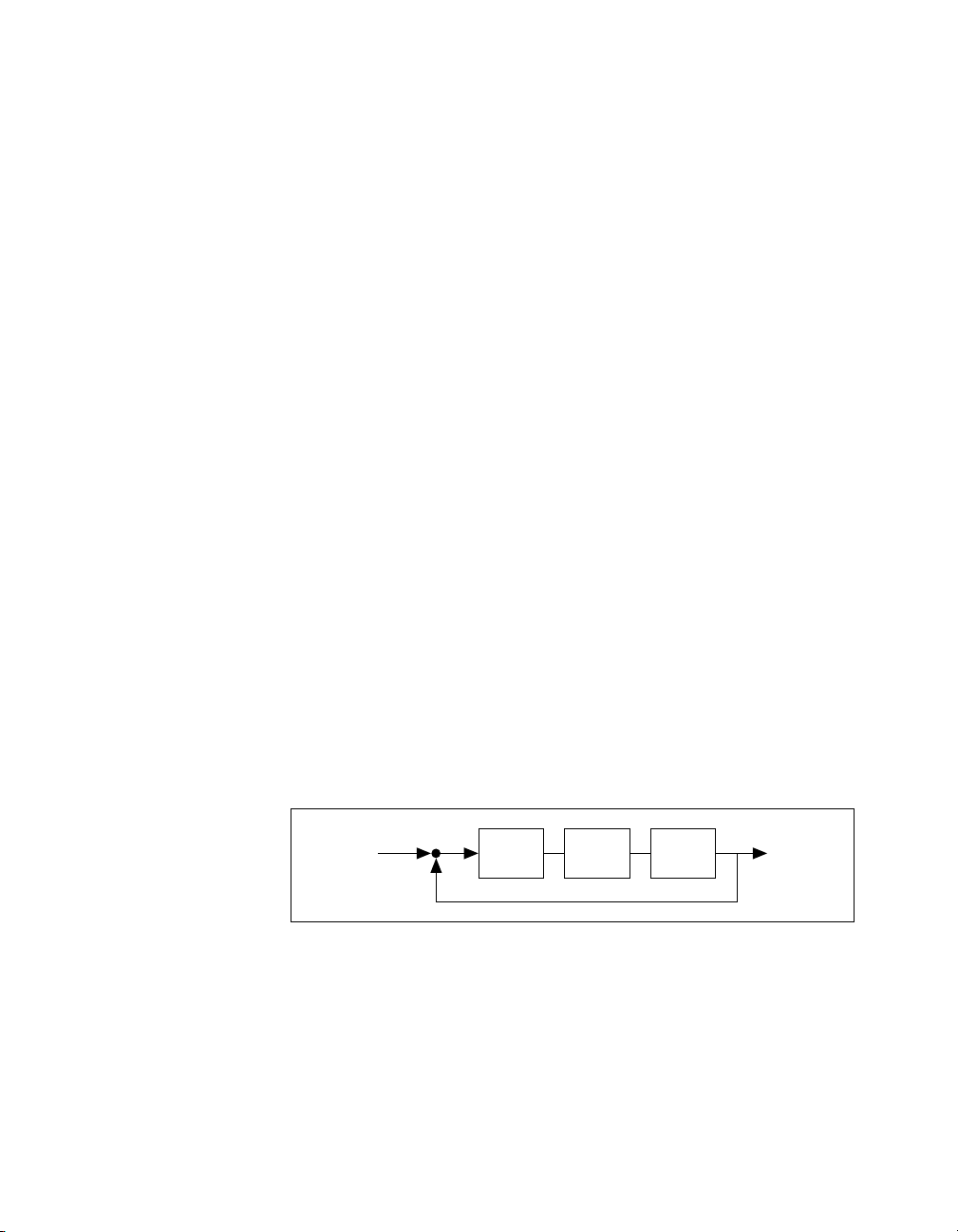
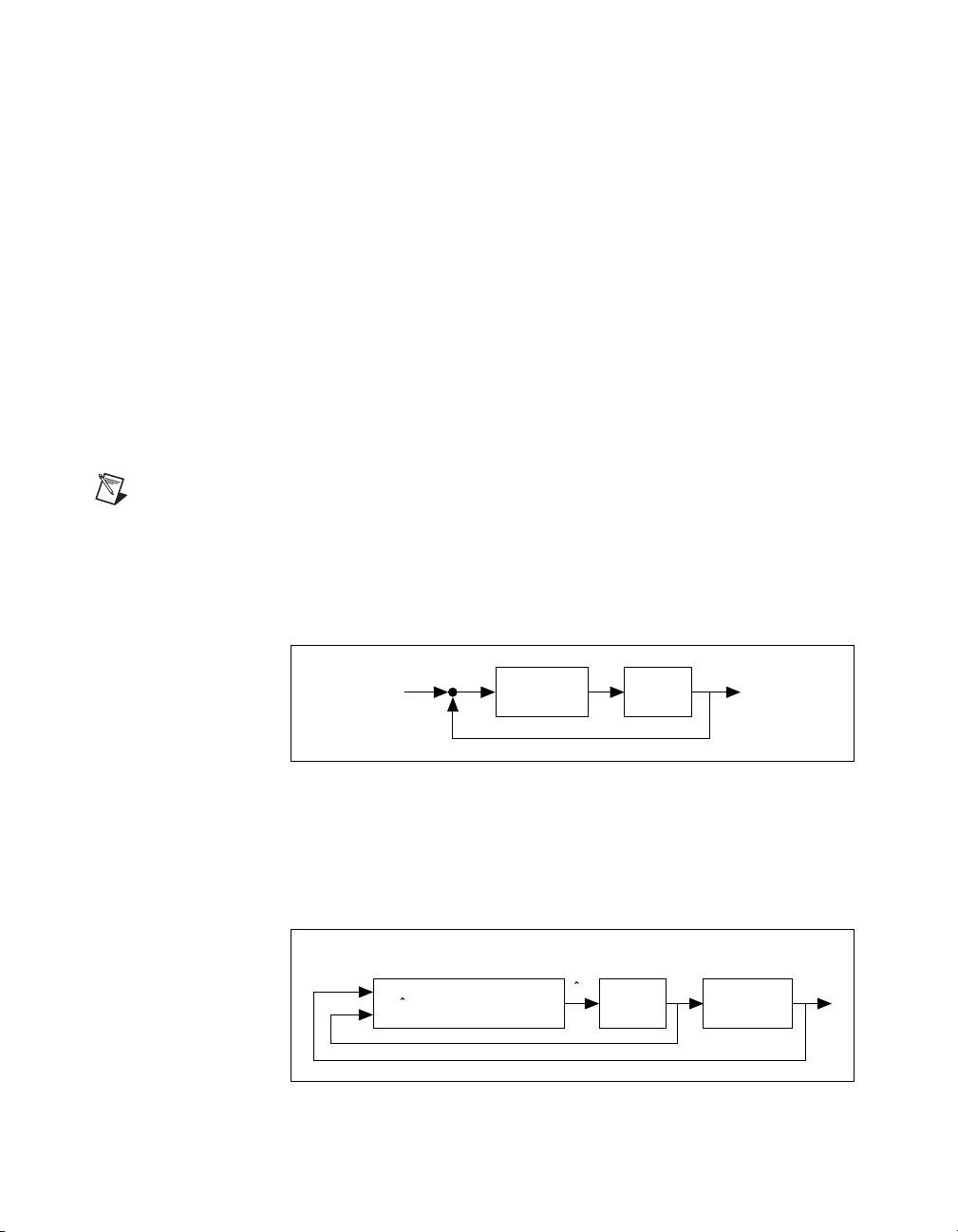
output to track a unit step input. To begin, put two compensators in the
feedforward path of the closed-loop system. Figure 1-1 is a closed-loop
block diagram of helicopter system H(s) with compensators K
(s) and K2(s)
1
in the feedforward path.
U(s) Y(s)
+
–
Figure 1-1. Block Diagram of Helicopter System H(s) with Compensators K1(s) and
Xmath Control Design Module 1-6 ni.com
G(s) K1(s) K2(s)
K
(s) in the Feedforward Path
2
Page 15

Chapter 1 Introduction
One approach to stabilizing this system is to try to cancel the pole at
–0.656513 by adding a compensator, K
Note It is important to understand that this is primarily an academic exercise. Accurate
(s), with a zero at –0.656513.
1
pole-zero cancellations are impracticable in the real world, and the mode corresponding to
that pole still exists internally.
This compensator must have a pole for realizability, so you add one at –10,
which is far enough away that its effect on dynamic response will be small
compared to that of the system’s other modes. In addition, you need to add
a zero to the left of the positive (and unstable) poles to pull the closed-loop
system roots into the left half plane. Choose s = 0 for the zero location and,
again, select a corresponding pole at –10. Call this second compensator
K
(s). To create these two compensators:
2
K1s=polynomial(ol_poles(3),"s")/...
polynomial(-10,"s");
K2s=polynomial(0,"s")/polynomial(-10,"s");
You then can cascade them in series with the original system Gs (or ssys)
and examine the locus of closed-loop roots for varying total compensator
gain K
. The poles out at –10 have a smaller effect on the system dynamics
c
than do the poles closer to the origin, so you can use the optional
rlocus( ) keywords to zoom in on the part of the locus nearer the origin.
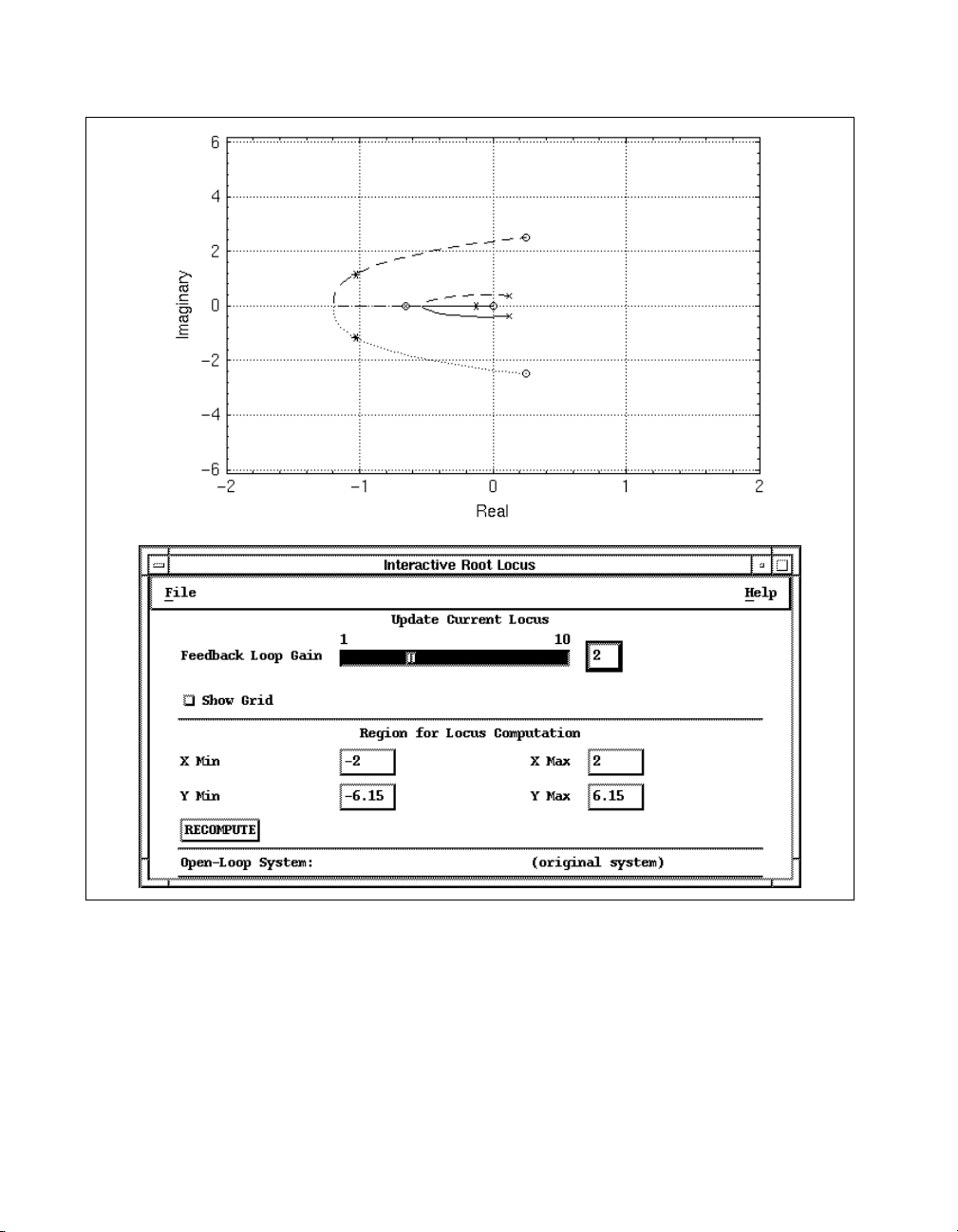
rlocus(K2s*K1s*Gs, {xmin = -2, xmax = 2})
The single input syntax activates interactive mode. A user interface lets
you change the gain through the Feedback Loop Gain slider and button.
The graphics window shows the closed-loop locus as a solid line, with the
open-loop poles shown as large
Increase the gain by moving the slider; notice the asterisks (
xs and the open-loop zeros shown as Os.
*) denoting
closed-loop pole location moving along the locus. The system is maximally
stable with total compensator gain K
figure, small
xs denote the pole location for K
= 2 as shown in Figure 1-2. In this
c
= 2, and the root locus gain
c
window shows settings.
© National Instruments Corporation 1-7 Xmath Control Design Module
Page 16
Chapter 1 Introduction
Figure 1-2. Locus of all Open-Loop and Closed-Loop Roots of Gs
If you cannot move the slider so that the gain is exactly 2, click the box to
the right of the slider and enter
2. To close the interactive root locus dialog
box, select File»Exit.
Xmath Control Design Module 1-8 ni.com
Page 17
Chapter 1 Introduction
Close the loop using the single-input syntax of feedback( ), which
implements direct unity-gain negative feedback, and obtain the system’s
step response using
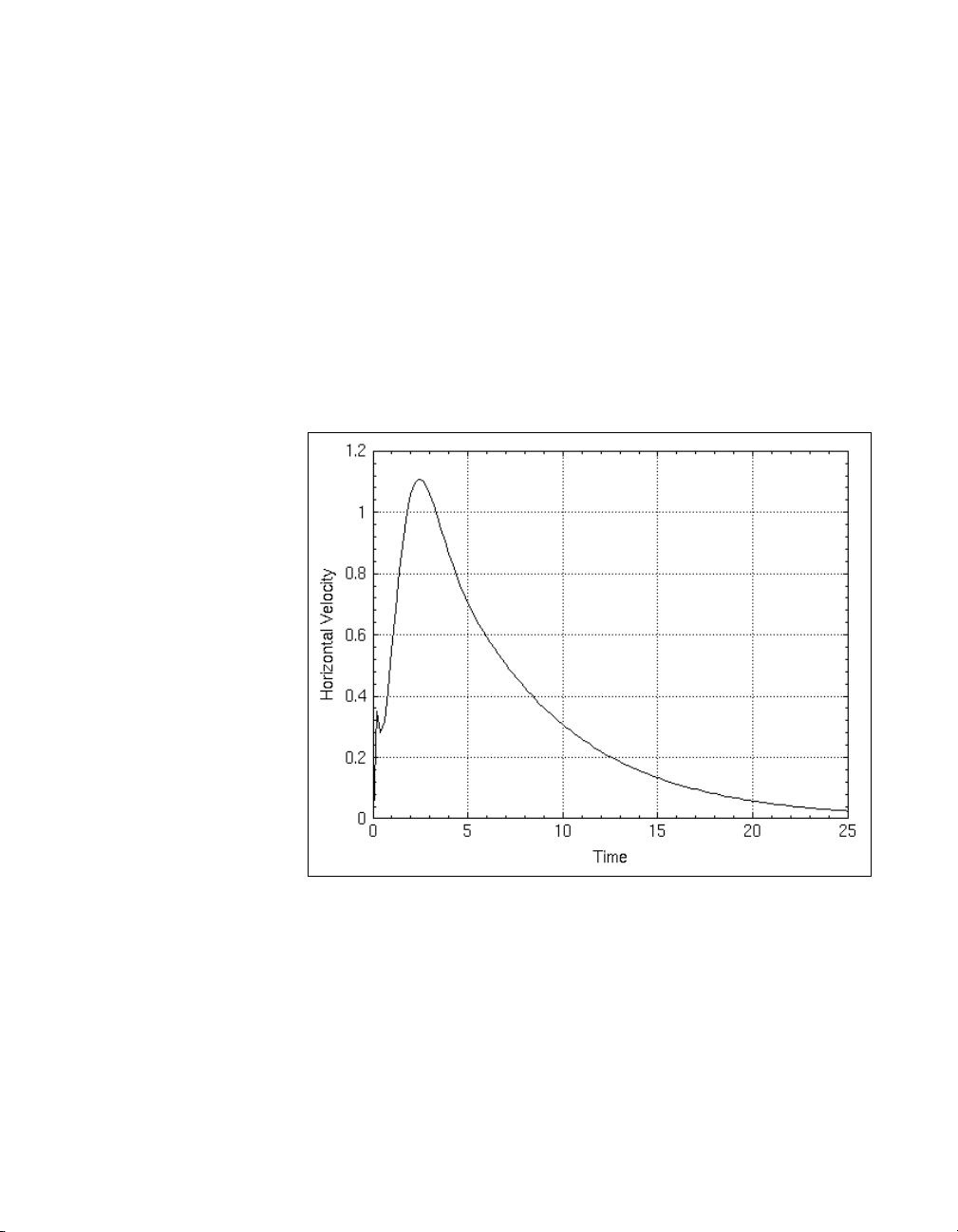
Kc = 2; cl_syscomp1 = feedback(Kc*K1s*K2s*Gs);
v = step(cl_syscomp1, 0:.2:25);
plot(v,{xlab="Time", ylab="Horizontal Velocity"})
step( ):
The resulting plot is shown in Figure 1-3. This result is not desirable. You
want the output (the helicopter velocity) to track the step input provided as
the rotor tilt angle, not zero out its effects over time (which would be an
appropriate response if the input corresponded to a disturbance). This
results from the compensator zero at s = 0 in the forward path of the
feedback loop.
Figure 1-3. Helicopter Velocity Response to a Step Input at the Rotor
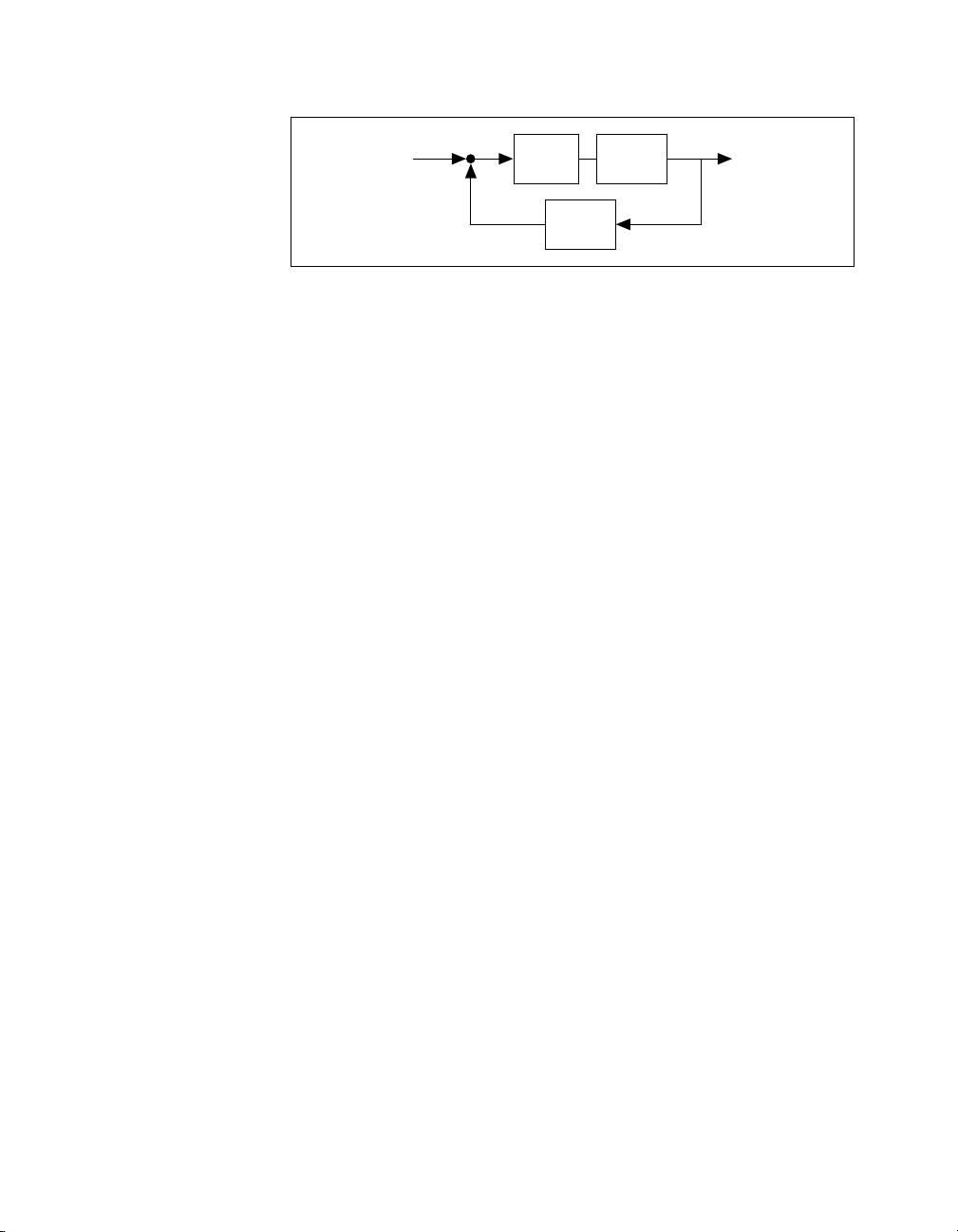
Instead, you now place K1(s) in the forward path and K2(s) in the feedback
path, so that the closed-loop system now has the configuration shown in
Figure 1-4.
© National Instruments Corporation 1-9 Xmath Control Design Module
Page 18
Chapter 1 Introduction
U(s) Y(s)
+
–
Figure 1-4. Block Diagram of the Closed-Loop Controller
G(s)
Kc1K1(s)
Kc2K2(s)
This is a block diagram of the closed-loop controller with compensator
K
(s) in the feedforward path and Kc2K2(s) in the feedback path.
c1K1
This time, instead of having all your gain K
in the forward path of the
c
closed-loop system, the system gain is split between the two compensators.
The gains K
closed-loop transfer function T
and Kc2 are defined such that Kc=2=Kc1Kc2 and the
c1
(s) is unity at s =0(DC).
c1
The closed-loop transfer function is represented by:
s()Gs()
K
Tcls()
-------------------------------------------------------------------=
1 K
c1K1
c1Kc2K1
s()K2s()Gs()+
You can find the values of the individual transfer functions at s =0 using
freq( ), and then substitute to solve the previous equation:
a = makematrix(freq(K1s*Gs,0));
b = makematrix(freq(K1s*K2s*Gs,0));
Solving:
Kc1 = (1+2*b)/a
Kc1 (a scalar) = 0.0241778
Kc2 = 2/Kc1
Kc2 (a scalar) = 82.7206
You now call feedback( ) again, this time using its second input
argument to indicate that the outputs of the first input system (forward path)
are fed back as the inputs to the second system (feedback path) in a
negative-feedback loop.
cl_syscomp2 = feedback(Kc1*K1s*Gs, Kc2*K2s);
Xmath Control Design Module 1-10 ni.com
Page 19

Chapter 1 Introduction
Because cl_syscomp2 contains an internal pole-zero cancellation, you
can rewrite it in minimal form and then check the closed-loop pole and zero
locations:
cl_syscomp2m = minimal(cl_syscomp2);
The system has 1 uncontrollable state
cl_poles = poles(cl_syscomp2m)
cl_poles (a column vector) =
-0.166518
-1.0325 + 1.16109 j
-1.0325 - 1.16109 j
-37.132
cl_zeros = zeros(cl_syscomp2m)
cl_zeros (a column vector) =
0.25 - 2.4975 j
0.25 + 2.4975 j
-10
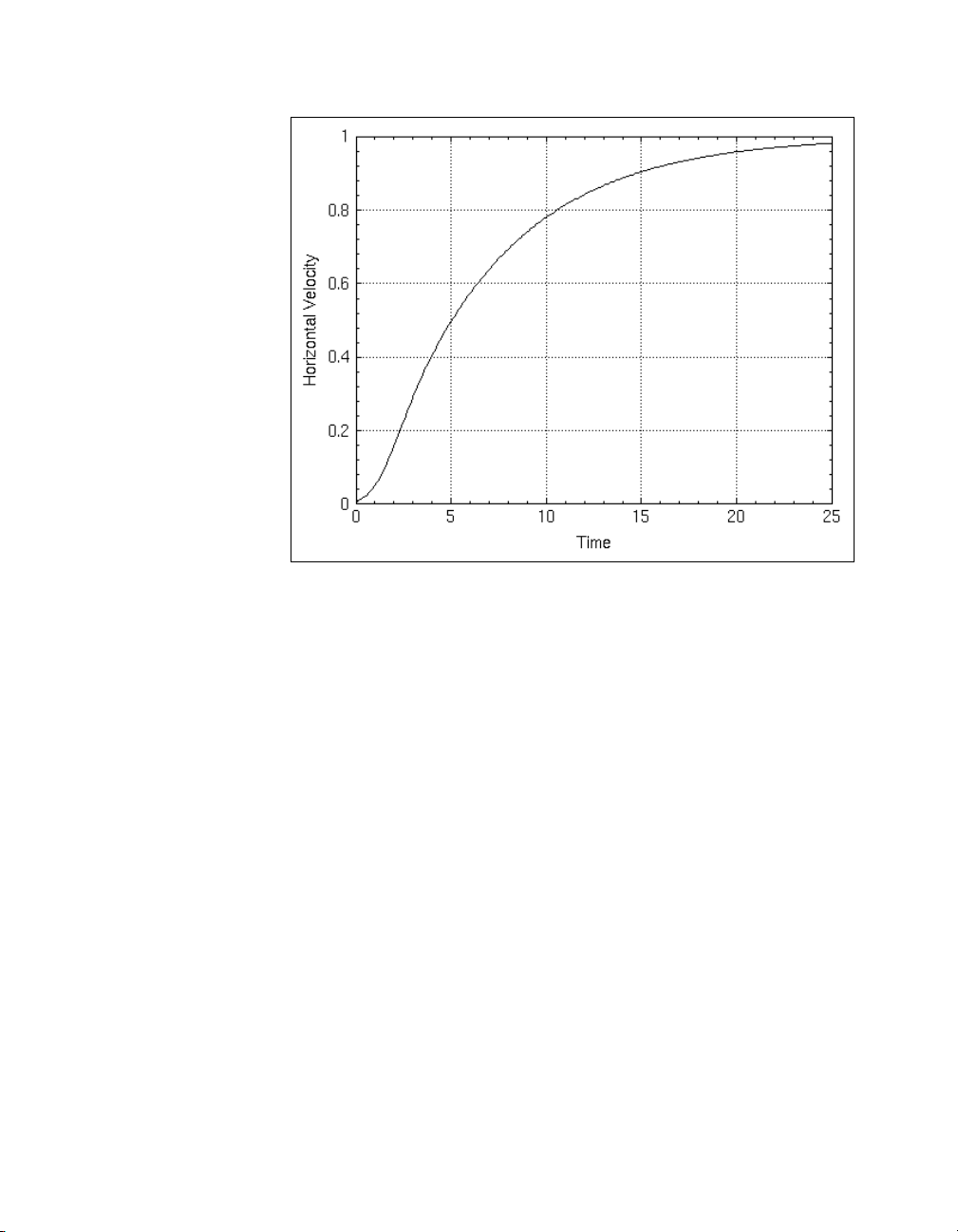
Now, examine the step response as shown in Figure 1-5.
vcomp = step(cl_syscomp2m, 0:.1:25);
plot (vcomp, {xlab = "Time",
ylab = "Horizontal Velocity"})
© National Instruments Corporation 1-11 Xmath Control Design Module
Page 20
Chapter 1 Introduction
Figure 1-5. Helicopter Velocity Tracking Step Input at the Rotor
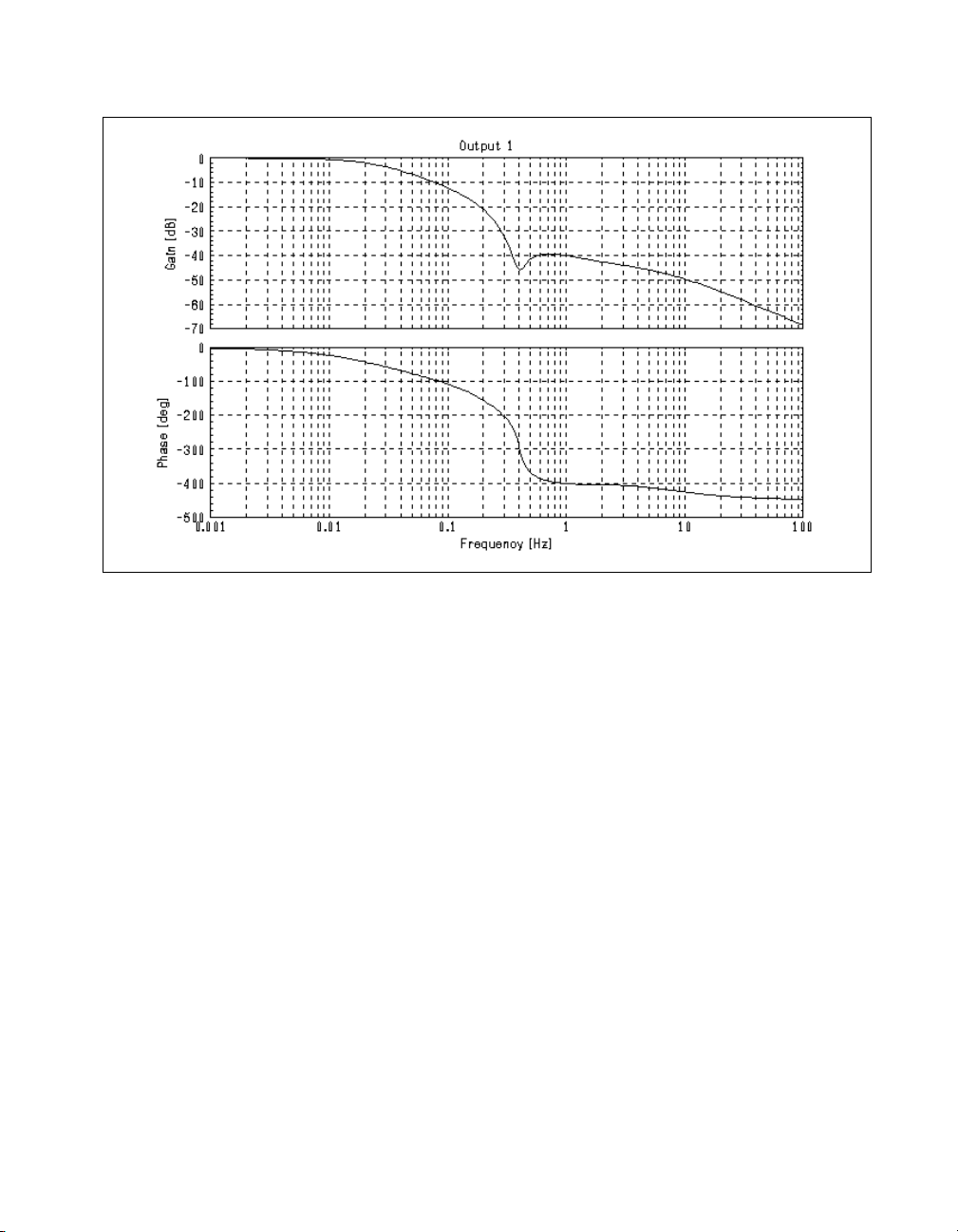
You also can look at the gain and phase margins of the system.
H = bode(cl_syscomp2m, {npts = 200, !wrap});
[gm,pm] = margin(H)
There are no 0 dB gain crossings.
gm (a pdm) =
domain |
---------+----------
0.250101 | 26.1694
---------+----------
pm is null
The bode plot of the closed-loop system is shown in Figure 1-6.
Xmath Control Design Module 1-12 ni.com
Page 21
Chapter 1 Introduction
Figure 1-6. Closed-Loop System Bode Plot
The domain of the gain and phase margin PDMs indicates the frequency
(in hertz) at which the margin occurs. So the gain can be increased by about
26.1 dB before the system becomes unstable.
Helicopter Hover Problem: State Feedback and Observer Design
The approach taken in the Helicopter Hover Problem: An Ad Hoc
Approach section, although producing a desirable response, often cannot
be used in practice because uncertainty in modeling generally precludes
exact knowledge of the location of the pole one plans to cancel.
Another approach is to feed the information obtained from the states back
to the inputs through gains calculated to relocate the closed-loop poles.
Refer to the Controllability section of Chapter 6, State-Space Design,
for more information. For this approach, you first need to verify that your
system is controllable and observable. When you have confirmed that it
is—that there are no hidden modes—you can design a full-state feedback
control law that will place the system eigenvalues at values that will yield
a stable system. Because the system is observable, you then can design an
estimator to yield estimates for the missing states. Again, you will require
that your system track a step input.
© National Instruments Corporation 1-13 Xmath Control Design Module
Page 22
Chapter 1 Introduction
You can verify that your system is controllable, then define the closed-loop
poles you want and use
poleplace( ) to find the feedback gains required
given the system A and B matrices.
[,,nuc] = controllable(Gs)
nuc (a scalar) = 0
Because the number of uncontrollable states is zero, Gs is controllable. This
means that you can use feedback through appropriately-sized gains to
position the system’s closed-loop poles anywhere you want. If you choose
the three poles to be moved to –1 ±j and –2, you get the following set of
gains:
clp = [-1+jay, -2];
Kfsb = poleplace(A,B,clp)
Kfsb (a row vector) = 0.470648 1.00004 0.062747
Note poleplace( )
If you assume that the outputs of the system are just the values of all the
states, you can draw the open-loop system block diagram as shown in
Figure 1-7. In this figure, the feedback path is shown in dotted lines and the
open-loop system in solid lines.
Because you do not have access to all three states—only one, the horizontal
velocity, is returned as an output—you need to estimate the other states,
thus implementing an observer-based controller. The block diagram for the
observer and controller together is shown in Figure 1-8.
does not require you to list both poles in a conjugate pair.
ru x
+
–
Figure 1-7. Full-State Feedback Regulator
Estimator Control Plant
x = (A
– LC)
⋅
x = Ax + Bu
x + Bu
+
K
fsb
x
Ly
uy
⋅
K
fsb
x = Ax + Bu
y = Cx + Du
Figure 1-8. Complete Controller and Estimator
Xmath Control Design Module 1-14 ni.com
Page 23

Chapter 1 Introduction
Specify the observer poles at [–3 + 3j, –4] and call poleplace( ) again:
op = [-3+3*jay, -4];
L = poleplace(A',C',op)
L (a row vector) = 5.46645 4.67623 9.58
You connect the controller to the observer using lqgcomp( ). L needs to
be a column vector, so you transpose it.
sys_obc = lqgcomp(ssys, Kfsb, L');
You can use names( ) to modify the names of the state estimates to be
more descriptive. To distinguish the estimated states from the “true” states,
you can use the
+ operator to append the string est to the estimated state
names, as shown in this example.
[,,osNames] = names(sys_obc);
estNames = osNames + [" (est)"," (est)"," (est)"];
estNames'?
ans (a column vector of strings) =
Pitch Rate (est)
Pitch Angle (est)
Horizontal v (est)
You can append these modified names to sys_obc:
sys_obc = system(sys_obc,{stateNames=estNames});
Then you close the loop and verify that the closed-loop poles are all in the
left-half plane.
sys_cl = feedback(ssys, sys_obc);
poles(sys_cl)
ans (a column vector) =
-1 + 1 j
-1 - 1 j
-2
-4
-3 + 3 j
-3 - 3 j
© National Instruments Corporation 1-15 Xmath Control Design Module
Page 24
Chapter 1 Introduction
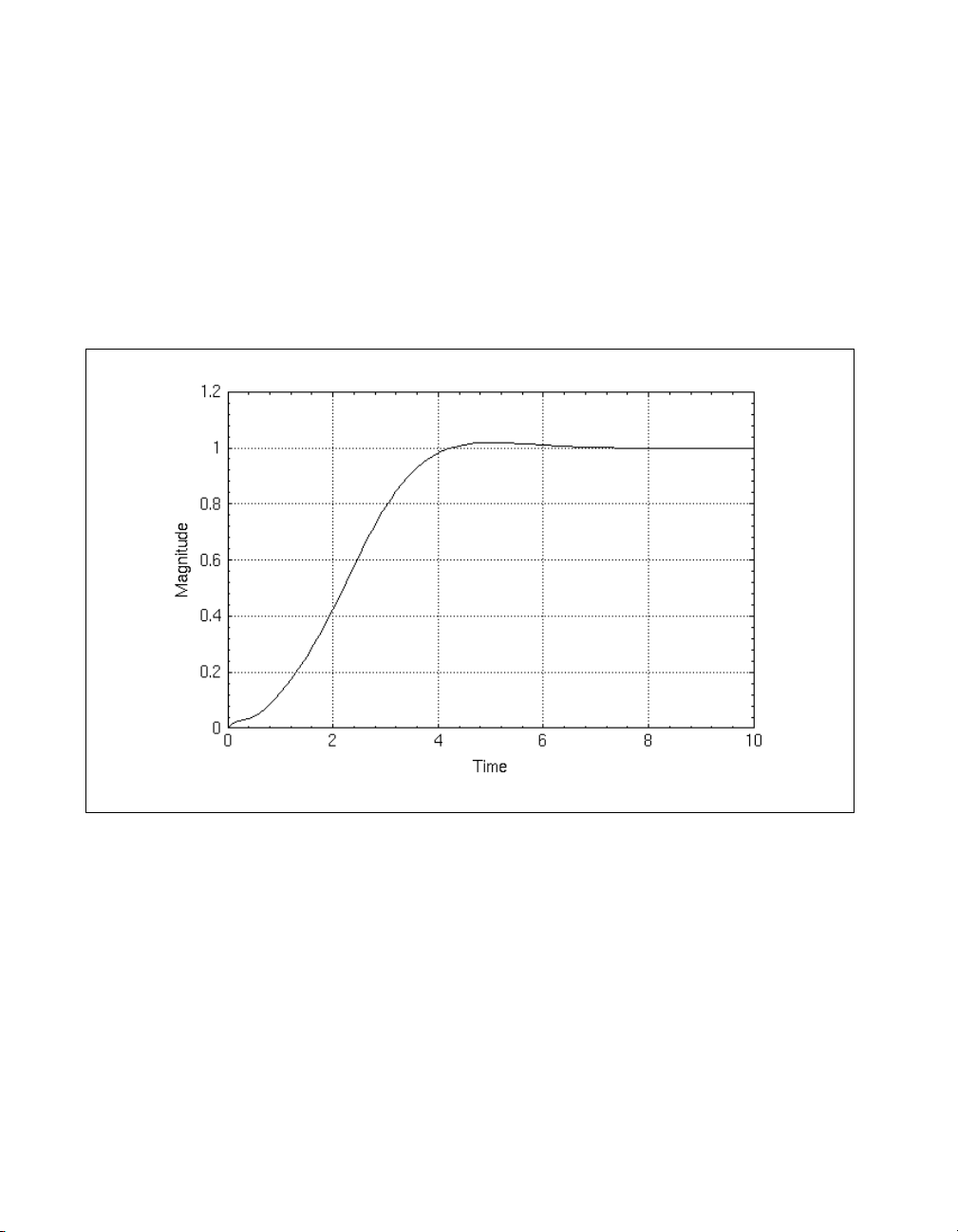
You can choose to scale the system output here for zero steady-state error
in the step response. This is accomplished in an intuitive manner, dividing
the system
sys_cl = sys_cl/51.76;
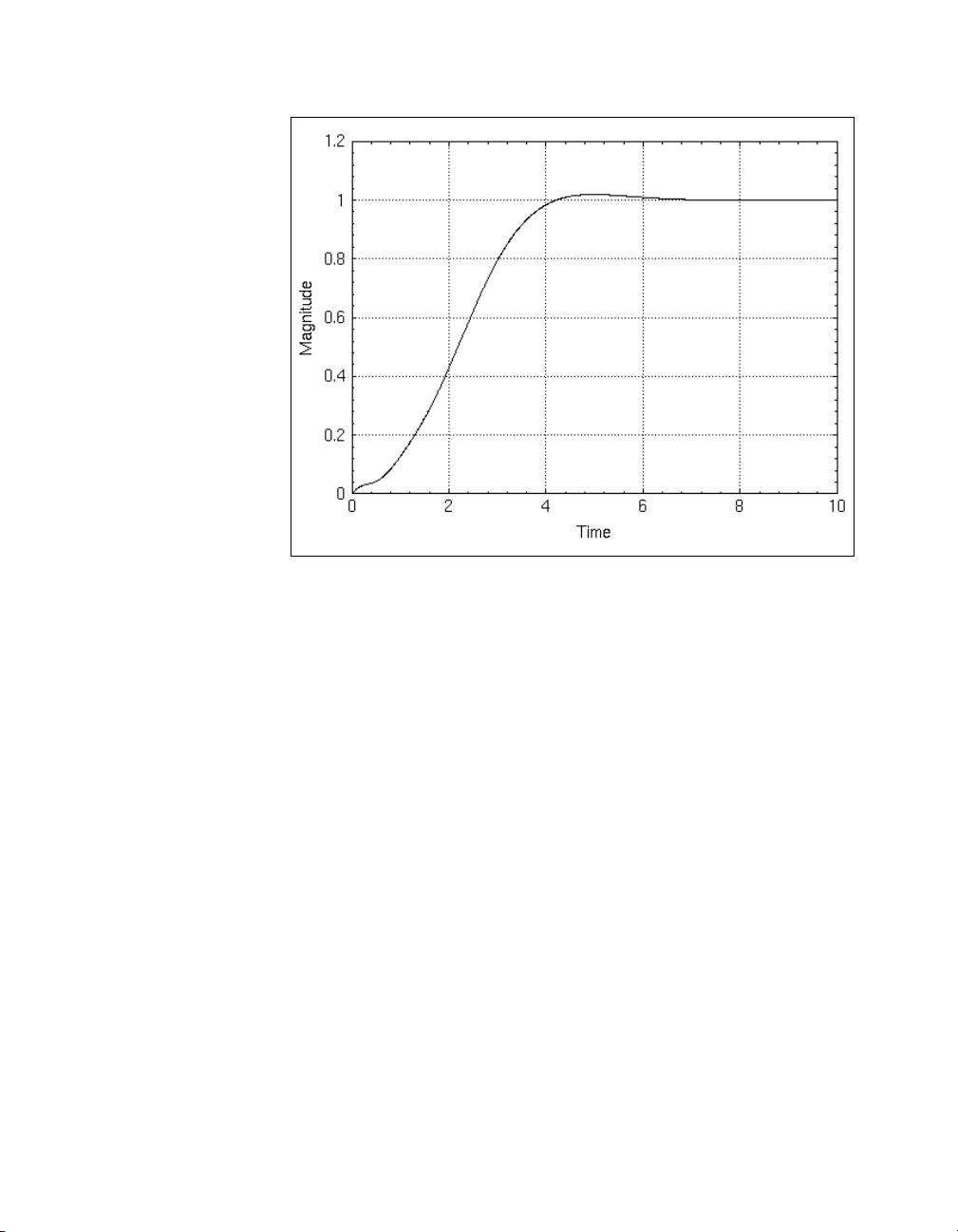
v_obc = step(sys_cl, 0:.1:10);
plot (v_obc, {xlab = "Time", ylab = "Magnitude"})
sys_cl by the desired scaling factor.
In Figure 1-9 the step response shows zero-steady-state error, little
overshoot, and a response time of less than seven seconds.
Figure 1-9. Step Response for Observer-Based Design
The system response is quite good, implying that your state estimates were
satisfactory. You can do some further simulation, this time returning all the
states directly from the original plant, and get a graphical picture of how the
estimates track the actual states. First, you need to create the closed-loop
system with all states available.
The
abcd( ) function extracts the A, B, C, and D matrices from a system
object. When you call it here, all you are interested in is the closed-loop
A matrix, so you do not need to extract the other state-space matrices.
A_cl = abcd(sys_cl);
Xmath Control Design Module 1-16 ni.com
Page 25

Chapter 1 Introduction
When you create the estimator system sys_est, you use the original
A matrix for the state-update equation, but you provide a zero external
input (a B matrix of zero). The output matrix is an identity matrix passing
back the three real state values and the three estimated state values as
output, again with no external input values affecting the output. Here you
use the optional
system( ) keyword X0 to set the real state values to
[1,2,3] and the estimated state values to [–1,–2,–3].
By simulating with a general input over two seconds, you can see how long
it takes for the state values provided by the estimator to correct the incorrect
initial conditions and track the real state values.
[,,allStates]=names(sys_cl);
sys_est = system(A_cl, zeros(6,1), eye(6,6), ...
zeros(6,1),{x0 = [1,2,3,-1,-2,-3], ...
stateNames = allStates});
state_resp = sys_est*pdm(ones(100,1), 0:(2/99):2);
Plot the results, referring to Figure 1-10:
plot(state_resp,{strip=2,xlab="Time",
legend=["State","State estimate"]})
Even in the relatively short time span of this simulation, the estimates and
the real states quickly converge.
© National Instruments Corporation 1-17 Xmath Control Design Module
Page 26
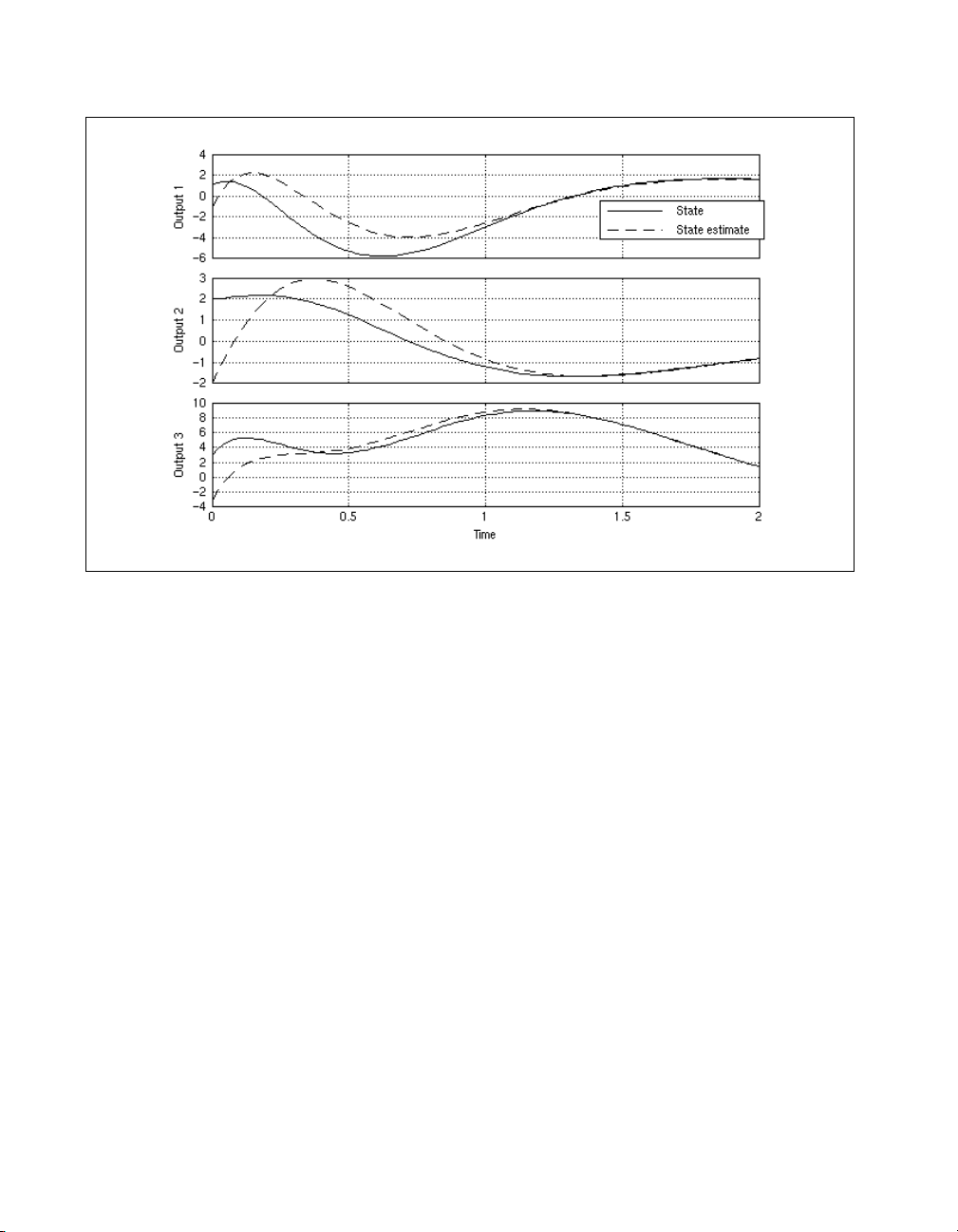
Chapter 1 Introduction
Figure 1-10. Multiple Plots Showing Time Needed for States to be Correctly Tracked
by Estimator, Given Incorrect Initial Values
Helicopter Hover Problem: Discrete Formulation
Discrete-time control systems are most frequently designed in one of
two ways: either directly implemented in the discrete domain, or first
solved as continuous problems—often deriving directly from differential
equations of motion—and then discretized. Here you take the second
approach with the problem solved in the Helicopter Hover Problem: State
Feedback and Observer Design section.
A guideline for choosing a sample rate for a system to be discretized is that
it be significantly less than the smallest time constant of the continuous
system divided by π.
Look at the open-loop pole magnitudes of your original open-loop
continuous-time system
max(abs(ol_poles))
ans (a scalar) = 0.656513
Xmath Control Design Module 1-18 ni.com
ssys:
Page 27
Chapter 1 Introduction
You can use the default exponential discretization method with dt =0.01
and compare frequency responses between the original system and the
discretized system:
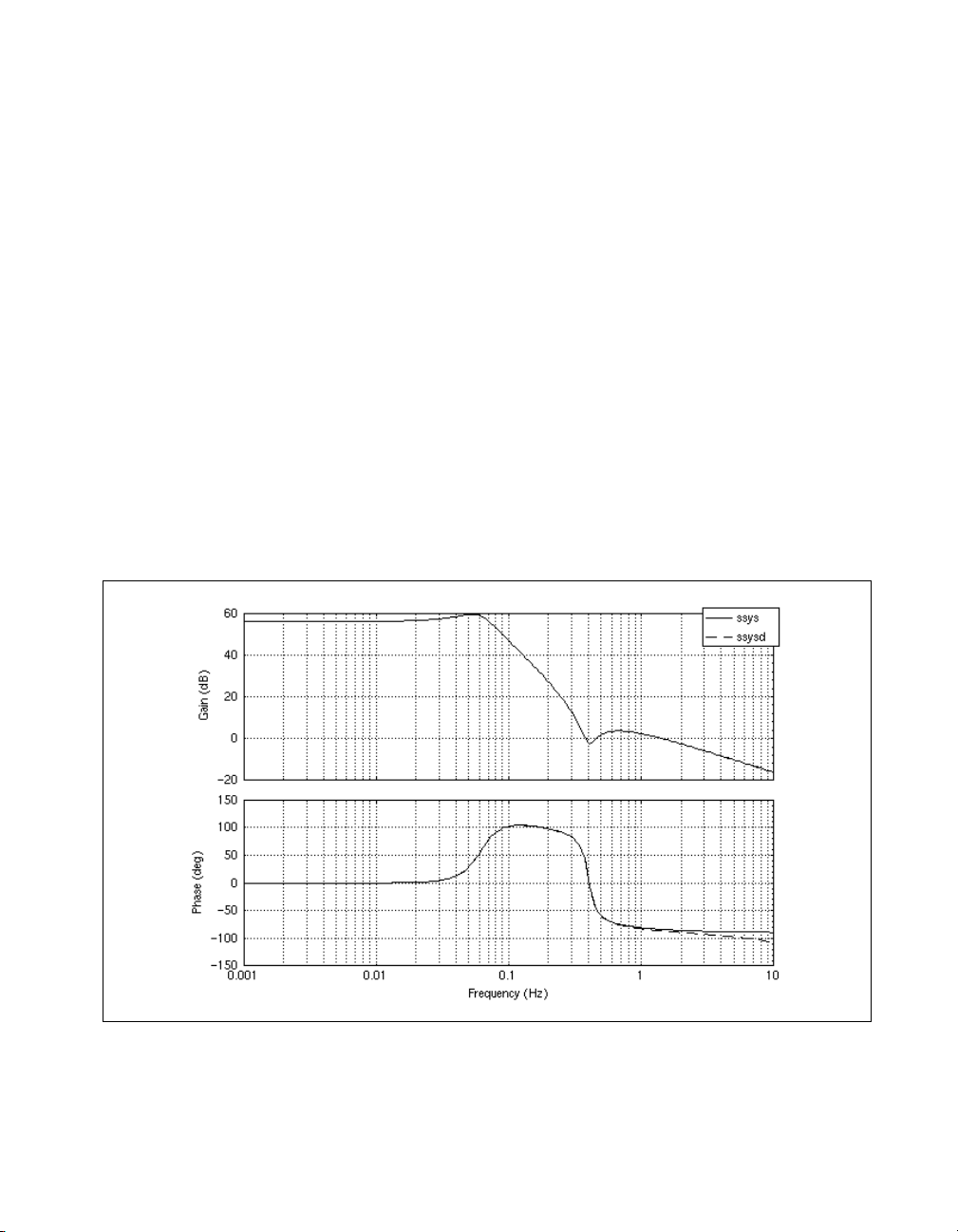
ssysd = discretize(ssys, 0.01);
f = freq(ssys,logspace(.001,10,200));
fd = freq(ssysd,logspace(.001,10,200));
In the following statements you compute the gain and phase of both
systems and then plot them.
db = 20*log10(abs(f)); ph = (180/pi)*atan2(f);
dbd = 20*log10(abs(fd)); phd = (180/pi)*atan2(fd);
plot([db;ph;dbd;phd],{strip=2,xlog,
ylab = ["Gain (dB)";"Phase (deg)"],
x_lab = "Frequency (Hz)",
legend = ["ssys";"ssysd"]})
In Figure 1-11 you can see the frequency responses match closely,
indicating that this discretization method captures the continuous system’s
dynamics accurately.
Figure 1-11. Frequency Response of ssys and Its Discrete Equivalent ssysd
© National Instruments Corporation 1-19 Xmath Control Design Module
Page 28
Chapter 1 Introduction
Figure 1-12. Step Response of a Discrete System Using Discretized
Observer-Based Controller
As you discretize the compensator, form the closed-loop, scaled system,
and simulate its response to a step input, you must ensure that the sampling
interval is the same (
sys_obcd = discretize(sys_obc, 0.01);
sys_cld = feedback(ssysd,sys_obcd)/51.76;
v_cld = step(sys_cld, 0:0.01:10);
plot (v_cld, {xlab = "Time", ylab = "Magnitude"})
dt = 0.01).
The resulting response is shown in Figure 1-12.
Inverted Wedge-Balancing Problem: LQG Control
[HW91] discusses an approach to balancing an inverted wedge by
controlling the location of a sliding mass along the inside of the wedge.
This example illustrates use of optimal control with a multi-input,
multi-output (MIMO) system. This approach is based on minimizing a
quadratic performance index with weight values based on the natural
constraints of the system.
Xmath Control Design Module 1-20 ni.com
Page 29
Chapter 1 Introduction
The linearized state-space equations, including the actuator and sensor
dynamics, are as follows:
·
θ
·
x
··
θ
··
x
0010
0001
15.54 10.93– 00
5.31– 0 0 16.24–
θ
x
θ
x
0
0
·
·
u+=
0
1.96
θ
57.29000
=
y
0 29.9 0 0
x
·
θ
·
x
θ is the angle (in radians) the wedge makes with the vertical axis, x is the
position of the sliding mass, and u is the control input voltage. The outputs
are scaled to give the measured angle in degrees and the measured position
in meters.
A = [0,0,1,0;0,0,0,1;
15.54,-10.93,0,0;
-5.31,0,0,-16.24];
B = [0,0,0,1.96]';
C = [57.29,0,0,0;0,29.9,0,0];
D = [0;0];
states = ["Angle", "Mass Position",
"Angular Velocity","Mass Velocity"];
wsys = system(A,B,C,D,
{inputNames= "Voltage",
stateNames = states,
outputNames=["Measured Angle","Measured
Position"]});
You need to ensure that you have no uncontrollable or unobservable modes
of the system:
[,,nuco] = minimal(wsys)
nuco (a scalar) = 0
Because there are no uncontrollable or unobservable states, you can
proceed with the design of a regulator and estimator. The weighting matrix
used here in designing the regulator reflects the desire to bring the value of
the first state, the angle with the vertical, to zero as quickly as possible.
© National Instruments Corporation 1-21 Xmath Control Design Module
Page 30

Chapter 1 Introduction
Because this system is open-loop unstable and has fairly fast poles in both
halves of the s-plane, you want to make sure it can bring the effect of an
external disturbance (such as a sharp push to the cart) to zero as quickly as
possible.
[Kr,EVr,Pr] = regulator(wsys,diag([1e8,1,1,1]),1);
You then can verify that the regulator gain Kr can be used with full-state
feedback to control this system by using an identity matrix for C to feed
back the states:
[no, ni, ns] = size(wsys);
augwsys = system(A,B,eye(ns, ns),[]);
creating the compensator (which is a system object, though it has no states
and thus has
comp = system([],[],[],Kr);
NULL A, B, and C matrices) with the gains Kr:
and feeding back the states:
wsysreg = feedback(augwsys, comp);
You then can observe the system response to a sustained disturbance by
simulating a five-second step response:
stepreg = step(wsysreg, 0:0.01:5);
plot (stepreg, {legend=states,
xlab="Time",ylab="Magnitude",
title="System Step Response with "+...
"Full State Availability",!grid})
The resulting plot is shown in Figure 1-13.
Xmath Control Design Module 1-22 ni.com
Page 31

Chapter 1 Introduction
Figure 1-13. Response of Full-State Feedback Controller to a Unit Step Disturbance
Having established your regulator design, you build the estimator and
simulate performance of the closed-loop system feeding back state
estimates. You select the weights for the estimator based on the assumption
that the state noise intensities corresponding to the wedge angle are smaller
than those corresponding to the wedge position. The output weight matrix
reflects your higher priority on the wedge angle than position.
The following steps generate the plot shown in Figure 1-14:
[Ke,EVe,Pe] = estimator(wsys,
diag([1e-3,1,1e-3,10]), diag([14,0.01]));
wcomp = lqgcomp(wsys,Kr,Ke);
wlqg = feedback(wsys,wcomp);
resp = step(wlqg,0:0.01:3);
plot (resp, {legend = names(wlqg),
xlab = "Time",ylab = "Magnitude",
title = "Observer-Controller System "+...
"Step Response",!grid})
© National Instruments Corporation 1-23 Xmath Control Design Module
Page 32

Chapter 1 Introduction
Figure 1-14. Response of Observer-Based Controller to a Unit Step Disturbance
Xmath Control Design Module 1-24 ni.com
Page 33

Linear System Representation
Xmath provides a structure for system representation called a system
object. This object includes system parameters in a data structure designed
to reflect the way these systems are analyzed mathematically. Operations
on these systems are likewise defined using operators that mirror as closely
as possible the notation control engineers use. This chapter outlines the
types of linear systems the system object represents and then discusses the
implementation of a system within Xmath. The functions used to create a
system object and to extract data from this object are an intrinsic part of the
object and are also described. Finally, this chapter discusses the functions
check( ), discretize( ), and makecontinuous( ), which use
information stored in the system object to convert systems from one
representation to another.
Linear Systems Represented in Xmath
Xmath handles finite-dimensional, linear, and time-invariant linear
systems in both discrete and continuous time. These systems take one
of the forms shown in Table 2-1.
2
Table 2-1. Summary of Linear Systems
System Type Continuous Time Discrete Time
State-spec
Transfer function
The transfer function representation can be used to describe single-input,
single output (SISO) systems only; there are no restrictions on the number
of input and outputs that can be specified for a state-space system. All of
these systems can be created using the Xmath
© National Instruments Corporation 2-1 Xmath Control Design Module
x·Ax Bu+=
yCxDu+=
Hs() CsI A–()
1–
BD+= Hz() CzI A–()1–BD+=
x
k 1+
y
k
AxkBu
+=
CxkDu
+=
k
system( ) function.
k
Page 34

Chapter 2 Linear System Representation
Transfer Function System Models
One way of representing continuous-time finite-dimensional linear
time-invariant systems is with the transfer function:
Hs()
num s()
------------------=
den s()
with num(s) and den(s) being polynomials in s. They can be specified either
by their roots or their coefficients. Transfer functions are defined using the
Laplace transform operators for continuous time and the forward shift
operator z for discrete time. Both forms of transfer functions are written
with positive coefficients, each higher order terms having successively
larger coefficients.
Discrete systems are defined analogously, using the z variable instead of s.
Xmath does not automatically perform cancellations of polynomial roots
appearing in both the numerator and the denominator of a transfer function.
If you want to cancel common roots in a transfer function, use the function
cancel( ). For state-space systems, refer to the minimal( ) function.
For more information, refer to the Minimal Realizations section of
Chapter 6, State-Space Design.
To illustrate how you arrive at a particular transfer function, if you have a
system differential equation that takes the form:
y··6y·8y++ 2u·u–=
(2-1)
Laplace-transforming equation (assuming zero initial conditions) yields:
2
s
Ys() 6sY s() 8 Ys()++ 2sU s() Us()–=
(2-2)
Collecting terms, you can find the transfer function from U(s) to Y(s), H(s):
Ys()
----------- Hs()
Us()
2s 1–
--------------------------==
2
s
(2-3)
6s 8++
The roots of the numerator polynomial are the zeros of the transfer
function, and the roots of the denominator are its poles. In some
circumstances, you might want to construct a transfer function based on
where you know the pole and zero locations to be. For example, you can
Xmath Control Design Module 2-2 ni.com
Page 35

Chapter 2 Linear System Representation
form the same transfer function as that derived in the preceding transfer
function equation using known pole, zero, and gain values:
The systems represented in Equations 2-3 and 2-4 can be represented using
Xmath’s system objects, as shown in Example 2-1.
The Xmath transfer function system object currently can be used to
represent single-input, single-output systems only. State-space form can
be used to describe systems with multiple inputs or outputs. For more
information, refer to the State-Space System Models section.
Example 2-1 Creating Transfer Functions
The polynomials in the numerator and denominator of the transfer function
in Equation 2-3 are both in coefficients form, (described using just
coefficients, not roots).
them to the
num3 = makepoly([2,-1],"s");
den3 = makepoly([1,6,8],"s");
H3 = system(num3,den3)
system( ) function:
This displays as:
H3 (a transfer function) =
2s - 1
----------
2
s
+ 6s + 8
initial integrator outputs
0
0
Input Names
----------Input 1
Output Names
-----------Output 1
System is continuous
Hs()
makepoly( ) creates two polynomials and passes
2 s 0.5–()
---------------------------------=
s 2+()s 4+()
(2-4)
The three statements used to create the transfer function could be more
compactly combined as one. The use of s as the variable in which to express
the transfer function is optional. Any variable, including the default x, can
© National Instruments Corporation 2-3 Xmath Control Design Module
Page 36

Chapter 2 Linear System Representation
be used so long as a consistent choice of variable is used for both numerator
and denominator polynomials.
The transfer function in pole-zero-gain form from the preceding equation
can be similarly implemented using the
specify the numerator and denominator by their roots.
Note The / operator also can be used to create systems in transfer function form, as an
alternative to using
system( ).
H4 = 2*polynomial(0.5,"s")/polynomial([-2,-4],"s")
which displays as:
H4 (a transfer function) =
2(s - 0.5)
--------------
(s + 2)(s + 4)
initial integrator outputs
0
0
Input Names
-----------
Input 1
Output Names
------------
Output 1
System is continuous
polynomial( ) function to
In both of these cases you have created a continuous system. Systems
created in Xmath contain sample rate information as well as the numbers
representing system dynamics. However, unless a sample rate is explicitly
given as a keyword to
system( ), it defaults to zero and the system is
continuous. For an illustration of how to create a discrete system, refer to
Example 2-2. The full discussion of the
system( ) function in the
system( ) section contains a listing of all the keywords associated with
system( ).
Xmath Control Design Module 2-4 ni.com
Page 37

State-Space System Models
State-space models comprise the second category of linear system
representations in Xmath. In state-space form, first-order differential
(continuous-time) and difference (discrete-time) equations are represented
as a set of state and output updates. The states are represented by a vector
x; u and y are vectors with as many elements as there are inputs and outputs,
respectively. This system model is useful for representing multi-input,
multi-output (MIMO) systems.
continuous time:
discrete time:
Chapter 2 Linear System Representation
x·Ax Bu+=
yCxDu+=
A straightforward mathematical transformation from the state-space form
to the transfer function form is as follows:
Hq() CqI A–()
All of the forms represented in these equations can be represented using
Xmath’s system objects, as shown in Example 2-2.
Example 2-2 Creating a Discrete State-Space System
Suppose you have a system which you describe in state-space form as:
x
and you know that the sample period of the system is 0.5 seconds between
samples—that is, the states and outputs are updated at every discrete
interval k, consisting in this case of 0.5 seconds.
k 1+
x
y
=
k
k 1+
y
k
AxkBu
CxkDu
01
0.75– 0
x
01
+=
k
+=
k
1–
BD+=
1
x
k
u
+=
k
k
0
© National Instruments Corporation 2-5 Xmath Control Design Module
Page 38

Chapter 2 Linear System Representation
Again, you create the system using the system( ) function. This time you
use the optional
A = [0,1;-0.75,0];
B = [1,0]';
C = [0,1];
D = 0;
sys4 = system(A,B,C,D, {dt = 0.5})
sys4 (a state space system) =
A
B
C
D
X0
System is discrete, sampling at 0.5 seconds.
dt keyword to indicate that this system is discrete.
0 1
-0.75 0
1
0
0 1
0
0
0
Although five lines of MathScript were used to be as explicit as possible in
creating this system, the call to
Note When you create a system object, its inputs (A, B, C, D) are no longer needed.
system( ) can encompass all of them.
Basic System Building Functions
The functions discussed in the following sections are available with the
general Xmath package. However, Control Design Module users will find
these functions an intrinsic part of their work, warranting this discussion.
The Xmath Help provides additional details about these functions and
examples of their use.
system( )
Sysd=system(A,B,C,D,{dt,inputNames,
outputNames,stateNames,X0})
Sys = system(num,den,{dt,inputNames,outputNames})
Sys = system(Sys,{keywords})
Xmath Control Design Module 2-6 ni.com
Page 39

Chapter 2 Linear System Representation
The system( ) function can create both the transfer-function and
state-space forms of the system object. It requires four compatibly-sized
matrices to create a state-space system, or a pair of polynomials to create
a transfer function.
You can use optional keywords to store additional information about your
system. Assigning
discrete, with a sampling period equal to that value. If
dt to a positive scalar value indicates that the system is
dt is not specified,
the system is continuous, with a sampling period defaulting to zero.
Because information indicating whether the system is continuous or
discrete is encapsulated within the system object itself, Xmath does not
have separate functions for discrete- and continuous-time system analysis.
Systems can be recognized by Xmath’s functions as discrete or continuous
using the
check( ) function and handled accordingly. For more
information, refer to the Using check( ) with System Objects section.
The capability to assign a discrete sample rate does not actually discretize
a continuous-time system, however. For information on discretizing a
system, refer to the Discretizing a System section.
A shortcut for creating state-space systems with an all-zero D matrix is
to use a null-matrix specifier
([]) for the D matrix instead of entering an
appropriately sized zero matrix. This will automatically set the D matrix to
be a zero matrix with row size equal to the row size of C, and column size
equal to the column size of B.
In addition, descriptive names for the inputs and outputs of a system can
be specified as vectors of string names and assigned to the
outputNames, and stateNames keywords. stateNames is valid only
when used in conjunction with a state-space system, as is the keyword
inputNames,
X0,
which can be used to set a vector of initial values for the states.
When you have created a system, you can modify it by changing the values
of any of the keywords discussed in this section by calling
system( ) with
the appropriate keyword setting.
Examples 2-1 and 2-2 illustrate how
transfer function and state-space system, respectively.
system( ) can be called to create a
system( ) also can
be used to change the attributes of an existing system.
Note In Example 2-3, the [] notation indicates that the D matrix should be an
appropriately sized (in this case, scalar) zero matrix.
© National Instruments Corporation 2-7 Xmath Control Design Module
Page 40

Chapter 2 Linear System Representation
Example 2-3 Using system( ) to Change the Attributes of an Existing System
sys4=system([0,1;-0.75,0],[1,0]',[0,1],[],
{dt=0.5});
sys4 = system(sys4, {inputNames = "Current",
outputNames = "Velocity",
stateNames = ["Torque","Angle"]})
sys4 (a state space system) =
A
0 1
-0.75 0
B
1
0
C
0 1
D
0
X0
0
0
State Names
----------Torque Angle
Input Names
----------Current
Output Names
-----------Velocity
System is discrete, sampling at 0.5 seconds.
abcd( )
[A,B,C,D,X0] = abcd(Sys)
The abcd( ) function extracts the component A, B, C, and D matrices
described in equations from a state-space system object as shown in the
State-Space System Models section. In addition, it returns the initial
conditions on the states if a fifth output argument is requested.
abcd( ) can be called on systems in either state-space or transfer function
form. If the system is a transfer function, the conversion to state-space is
Xmath Control Design Module 2-8 ni.com
Page 41

done internally to return A, B, C, and D, though the format of the variable
Sys itself remains unchanged. The transfer function must be proper.
Using the systems defined in Examples 2-1 and 2-2, Example 2-4
illustrates the use of
Example 2-4 Using abcd( ) to Extract the State-Space Matrices
H3=makepoly([2,-1],"s")/makepoly([1,6,8],"s");
sys4=system([0,1;-0.75,0],[1,0]',[0,1],0,
{dt=0.5});
abcd( ).
You can extract the state-space matrices from each.
Note For the transfer function H3, an internal conversion is performed.
[A3,B3,C3,D3] = abcd(H3)?
A3 (a square matrix) =
-2 1.58114
0 -4
B3 (a column vector) =
0
2
C3 (a row vector) = -1.58114 1
D3 (a scalar) = 0
[A4,B4,C4,D4,X0] = abcd(sys4)
A4 (a square matrix) =
0 1
-0.75 0
B4 (a column vector) =
1
0
C4 (a row vector) = 0 1
D4 (a scalar) = 0
X0 (a column vector) =
0
0
Chapter 2 Linear System Representation
© National Instruments Corporation 2-9 Xmath Control Design Module
Page 42

Chapter 2 Linear System Representation
numden( )
[num,den] = numden(Sys)
The numden( ) function returns the numerator and denominator
polynomials comprising a single-input, single-output system in transfer
function form. If the system is in state-space form, an internal conversion
is performed to find the transfer function equivalent, but the format of the
system variable itself remains unchanged. State-space systems used in
conjunction with
As noted in the Transfer Function System Models section, common roots in
the numerator and denominator polynomials are not canceled.
Example 2-5 uses the state-space system from Example 2-2 to illustrate the
use of
numden( ).
Example 2-5 Using numden( ) to Extract the Transfer Function Polynomials
sys4=system([0,1;-0.75,0],[1,0]',[0,1],0,
{dt=0.5});
[num,den] = numden(sys4)?
num (a polynomial) =
-0.75
den (a polynomial) =
2
(z
+ 0.75)
numden( ) must be single-input, single-output.
Because num and den are polynomial objects and not a complete system,
the discrete sampling time is not explicitly saved. You can use
with the
convert keyword to map the two internal representations to each
check( )
other, as described in the Using check( ) with System Objects section.
However, notice that z was used as the polynomial variable, indicating that
these numerator and denominator polynomials were obtained from a
discrete-time system. Had the system been continuous, s would have been
used instead of z.
period( )
dt = period(Sys)
The period( ) function extracts the sample period (in seconds) of a
system. If the system is continuous,
In Example 2-5, you found the numerator and denominator polynomials
corresponding to the discrete state-space system. Example 2-6 combines
Xmath Control Design Module 2-10 ni.com
period( ) will return zero.
Page 43

these polynomials into a transfer-function and uses period( ) to set the
sampling interval to match that of
Example 2-6 Using period( ) to Extract the Sampling Period
[num,den]=numden(sys4);
H4 = system(num,den,{dt = period(sys4)})
H4 (a transfer function) =
-0.75
-----------
2
(z
+ 0.75)
System is discrete, sampling at 0.5 seconds.
Chapter 2 Linear System Representation
sys4.
check( )
provides a more concise means of converting between
state-space and transfer function form, as described in the Using check( )
with System Objects section, but this example illustrates how the output of
one function can be specified directly as keyword input to another.
names( )
[outputNames,inputNames,stateNames] = names(Sys)
The names( ) function extracts matrices of strings representing the input,
output, and (if the system is in state space form) state names of a system.
names( ) also can be used to extract information from the PDM and
polynomial objects. More information on these functions can be found in
the MATRIXx Help.
When you create a system without specifying any names, a default set of
names are assigned to it. Unlike user-specified names, these default names
are not displayed in the Xmath Commands
subset of the names you select to store with the system still can be extracted
using
names( ) as shown in Example 2-7.
Example 2-7 Using names( ) to Extract the Variable Names Associated with a System
H3 = system(makepoly([2,-1],"s"),
makepoly([1,6,8],"s"));
[outputNames, inputNames] = names(H3)
outputNames (a string) = Output 1
inputNames (a string) = Input 1
sys5=system([0,1;-0.75,0],[1,0]',[0,1],0,{dt=0.5,
inputNames = "Current",
window. However, all, or any
© National Instruments Corporation 2-11 Xmath Control Design Module
Page 44

Chapter 2 Linear System Representation
outputNames = "Velocity",
stateNames = ["Torque","Angle"]});
[,,stateNames] = names(sys5)?
statenames (a row vector of strings)=Torque Angle
Size and Indexing of Dynamic Systems
The size of a system object is defined by how many outputs, inputs, and
(in the case of a state-space system) states it has. You can use the
function to find these dimensions.
You can index into a dynamic system to create a new dynamic system
which has a subset of the original inputs and outputs:
Sys = Sys1(i,j) is defined to be a system such that y = y1(i) and u = u1(j).
i and j can both be vectors as well, in which case multiple inputs and
outputs will be extracted.
The previous definition of indexing was designed with the traditional
definition of a transfer function in mind.
size( )
yq() Sys q() uq()×=
Using check( ) with System Objects
Several common attributes of systems can be easily determined using
Xmath’s ability to distinguish between object types and characteristics.
You can use the
Example 2-8, to determine whether a system is in transfer function or
state-space form, discrete, continuous, or stable. In addition, you can use
check( ) with the convert keyword to change a system’s representation
between SISO state-space and transfer-function forms.
Example 2-8 Using check( ) with a System
a = [1.875,0;0,-0.26];
b = [1;0];
c = [0.5,1];
d = 0;
sys = system(a,b,c,d, {dt = 0.001});
Because this system is discrete and has a pole where magnitude exceeds 1,
it is not stable.
check( ) function with systems, as shown in
Xmath Control Design Module 2-12 ni.com
Page 45

check(sys, {stable})
ans (a scalar) = 0
check(sys, {discrete, ss})
ans (a scalar) = 1
[, tfsys] = check(sys, {tf, convert})
tfsys (a transfer function) =
(z + 0.26)
--------------------(z + 0.26)(z - 1.875)
initial delay outputs
0
0
System is discrete, sampling at 0.001 seconds.
Discretizing a System
Many systems where behavior derives from physical equations of motion
can be modeled most naturally as continuous processes, using differential
equations. Therefore, you often choose to discretize these models for use
with a digital controller. A number of mathematical methods have been
developed to approximate the behavior of a continuous system in a
discrete-time representation with an appropriately fast sampling rate.
Xmath provides two functions,
makecontinuous( ), which encompass a range of these techniques.
discretize( ) converts a system from its representation as a continuous
function in the s-domain to a discrete-time z-domain function.
makecontinuous( ) does the reverse, transforming a discrete system to
its continuous form.
Chapter 2 Linear System Representation
discretize( ) and
discretize( )
SysD = discretize(Sys,{dt,exponential,forward,backward,
tustins,ztransform,polezero,firstorder})
The discretize( ) function has a number of keywords that correspond
to the different methods of continuous-to-discrete conversion that are
implemented within Xmath. The sampling interval (in seconds) for the
discrete system should be set equal to the keyword
is specified, a default of 0.5 seconds is used. The default discretization
method used is the exponential (step-invariant) transform. The different
© National Instruments Corporation 2-13 Xmath Control Design Module
dt. If no value for dt
Page 46

Chapter 2 Linear System Representation
discretization methods used based on the specification of each keyword are
discussed in the following sections.
Numerical Integration Methods: forward, backward, tustins
Xmath provides three methods of numerical integration of a differential
transfer function: the forward and backward rectangular rules, and Tustin’s
rule (also called the bilinear or trapezoidal transform).
To convert the system description from a continuous differential equation
to a discrete difference equation, you approximate the value of the
derivative in the continuous equation over each
find the area of the geometric region having width
the derivative. You can do this in a number of ways, as discussed in
[FPW90].
For the forward rectangular method, you assume the incremental area term
between sampling times k * dt and (k +1)*dt to be a rectangle having
width dt and height equal to the integral form of the differential equation at
time (k +1)*dt. In essence, you get your amplitude estimate for each
rectangle by looking forward, hence the name. The backward rectangular
method arises similarly, except that you get the rectangle’s height by
looking backward and taking the value of the integral at k * dt. The forward
rectangular approach tends to overestimate the incremental area somewhat
and the backward approach tends to underestimate it (though with a
sufficiently small sampling interval, this may not pose a large problem).
The trapezoid rule strikes a balance between these two methods by taking
the average of the rectangles defined by the forward and backward methods
and using that value as the incremental area in approximating the difference
equation.
dt seconds of time, then
dt and height equal to
These approaches can be summarized as substitutions between the
continuous-time Laplace-transform operators and the discrete z-transform
operator z as shown in Table 2-1.
Table 2-2. Mapping Methods for discretize( )
Method of Approximation Continuous to Discrete
Forward rectangular rule:
Keyword:
Xmath Control Design Module 2-14 ni.com
forward
z 1–
-----------
s
→
dt
Page 47

Chapter 2 Linear System Representation
Table 2-2. Mapping Methods for discretize( ) (Continued)
Method of Approximation Continuous to Discrete
Backward rectangular rule:
Keyword:
Tustin’s rule:
Keyword:
backward
tustins
z 1–
-----------
s
→
zdt
2 z 1–()
---------------------
s
→
dt z 1+()
Pole-Zero Matching: polezero
The pole-zero matching method of discretizing a continuous system
follows from the relation between the continuous s and discrete z frequency
domains:
sT
=
ze
where T is the sampling interval to be used for the discrete system.
Continuous-time poles and finite zeros are mapped to the z-plane using this
relation. Zeros at infinity are mapped into z = 0, where they do not affect
the frequency response.
After the poles and zeros have been mapped, the algorithm tries to
make sure the system gains are equivalent at some critical frequency.
If the systems have no poles or zeros at DC(s =0,z = 1), the discrete-time
gain is selected such that the system gains match at DC. Alternatively,
if the systems have no poles or zeros at the Nyquist frequency
(s = p *j/T, z = –1), the gains are equalized at that frequency. In the
event that neither of these gains can be matched, no gain is chosen.
Z-Transform: ztransform
This method is a direct Z-transform of the continuous-time transfer
function, which corresponds to the Z-transform of the impulse response of
the system. If
of the continuous and discrete systems. The responses may differ slightly
due to round off error.
ztransform is used, you will match the impulse responses
Hold Equivalence Methods: exponential and firstorder
The discretization methods for exponential and firstorder both rely
on the approximation that the discrete-time response can be represented as
a hold on the sampled values of the continuous-time response.
© National Instruments Corporation 2-15 Xmath Control Design Module
Page 48

Chapter 2 Linear System Representation
The exponential keyword assumes that the response value between
samples is constant and can, therefore, be represented by a zero-order hold
polynomial. When
response is discretized using th e Z-transform, then the result is
divided by the Z-transform of a step z/(z – 1) to produce the desired
transfer function.
The
firstorder keyword assumes extrapolation between samples
(connecting sample to sample in a straight line). If
specified, the continuous-time ramp response is discretized using the
Z-transform and then the result is divided by the Z-transform of a ramp
z * dt/(z – 1)2 to produce the desired transfer function.
In each of these cases, the appropriate response (impulse, step, or ramp)
will match the continuous response very closely, with the only error being
round off error.
While no one method of discretization will always perform best for all
systems and all sampling times, it is often a good idea to compare the
frequency response resulting from different discretized models to the
continuous response. Example 2-9 applies the forward, backward, tustins,
exponential, and matched pole-zero discretization methods.
exponential is specified, the continuous-time step
firstorder is
Example 2-9 A Comparison of Several Discretization Methods
H = system(0.5*polynomial([-0.36]),
makepoly([1,2.79,2.74,1.11,0.16]));
Create a logspaced vector for the frequency range of the response:
F = logspace(.001,5,200);
Perform the discretization using the different algorithms:
Hd_f = discretize(H,0.1,{forward});
Hd_b = discretize(H,0.1,{backward});
Hd_t = discretize(H,0.1,{tustins});
Hd_z = discretize(H,0.1,{polezero});
Hd_e = discretize(H,0.1,{exponential});
Now you can calculate the magnitude response as a function of frequency,
gainc = 20*log10(abs(freq(H,F)));
gain_f = 20*log10(abs(freq(Hd_f,F)));
gain_b = 20*log10(abs(freq(Hd_b,F)));
gain_t = 20*log10(abs(freq(Hd_t,F)));
Xmath Control Design Module 2-16 ni.com
Page 49

Chapter 2 Linear System Representation
gain_z = 20*log10(abs(freq(Hd_z,F)));
gain_e = 20*log10(abs(freq(Hd_e,F)));
and plot it (as shown in Figure 2-1).
plot ([gainc,gain_f,gain_b,gain_t,gain_z,gain_e],
{legend = ["Continuous", "Forward",
"Backward", "Tustins", "Pole Zero",
"Exponential"], x_log,
xlab="Frequency (Hz)",ylab="Magnitude (dB)"})
Figure 2-1. Comparison of Different Frequency Response Techniques
Although most of the discretizations used would give acceptable
approximations to the continuous-time response, notice that most of them
diverge greatly at higher frequencies. You may find it illustrative to run this
example with larger and smaller sampling intervals to see how the choice
of sampling rate, as well as the choice of method, affects the accuracy of
the discretized frequency response.
makecontinuous( )
Sys=makecontinuous(SysD,{exponential, forward,
backward,tustins, ztransform})
© National Instruments Corporation 2-17 Xmath Control Design Module
Page 50

Chapter 2 Linear System Representation
Many of the discretization techniques discussed in the Hold Equivalence
Methods: exponential and firstorder section can be easily reversed to
obtain a continuous equivalent to a discrete system. The
makecontinuous( ) function implements these reverse algorithms
based on the keyword you specify as shown in Example 2-10. Although
makecontinuous( ) accepts an input system in any form, it returns the
continuous-time system as a state-space system.
The forward, backward, and Tustin methods for mapping from the s-plane
to the z-plane can be easily reversed using the equivalencies shown in
Tabl e 2-3.
Method of Approximation Discrete to Continuous
Table 2-3. Mapping Methods for makecontinuous( )
Forward rectangular rule:
Keyword:
forward
Backward rectangular rule:
Keyword:
backward
Tustin’s rule:
Keyword:
tustins
Discrete-to-continuous algorithms using matrix logarithms (to reverse the
exponential operations involved in doing the z-transform for the impulse
invariant zero-order hold) are available for the
(step-invariant) transformation and the
methods. A limitation of these methods, however, is that they will not return
a meaningful continuous equivalent to a discrete system that has pure
delays (1/z terms), because the logarithm of zero is infinite.
Example 2-10 Verifying a Discretization Using makecontinuous( )
Create a system:
H = 0.5*polynomial([-0.36])/...
polynomial([-1,-1,-0.395+0.06305*jay,
-0.395-0.06305*jay]);
Form the discrete equivalent using the forward approximation:
Hd_f = discretize(H,0.1, {forward});
z 1 sdt()+→
1
---------------------
z
→
1 sdt()–
1 sdt()+ 2⁄
----------------------------
z
→
1 sdt()– 2⁄
exponential
ztransform (impulse-invariant)
Xmath Control Design Module 2-18 ni.com
Page 51

Chapter 2 Linear System Representation
Now convert back to the continuous form:
Hc = makecontinuous(Hd_f, {forward});
[num,den] = numden(Hc)
num (a polynomial) =
(s + 0.36)
den (a polynomial) =
2
(s + 0.999998)(s + 1)(s + 0.79s + 0.16)
Although makecontinuous( ) restores the continuous-time poles and
zeros, it cannot match gains precisely.
© National Instruments Corporation 2-19 Xmath Control Design Module
Page 52

Building System Connections
Large system models are frequently built by connecting smaller models
together. You can perform different types of linear system interconnections
using the Xmath functions discussed in this chapter.
3
MathScript allows operators (
different behaviors when used with different objects. A number of simple
types of connections have been implemented as overloaded operators on
systems, while more complex connections are available through
specialized functions.
*,+, and so on) to be overloaded—given
Linear System Interconnection Operators
Overloaded operators provide a quick way to perform different types of
basic connections between systems. Table 3-1 illustrates these operations
Diagram Description
Sys = Sys1 + Sys2
u1
Sys1
Sys2
u2
on a pair of systems
and
u
, respectively.
2
Table 3-1. Summary of Interconnection Operators
y1
yu
+
y2
Sys
and Sys2 with outputs y1 and y2 and inputs u1
1
Parallel connection where y = y
tied together where
u=u1=u
+ y
. The inputs are
1
2
.
2
Sys = Sys1 – Sys2
u1
Sys1
Sys2
u2
© National Instruments Corporation 3-1 Xmath Control Design Module
y1
yu
–
y2
Parallel connection where y = y
case
, Sys = –Sys
together where
where y=–y1. The inputs are tied
1
u=u1=u
.
2
+ y
1
. In the unary
2
Page 53

Chapter 3 Building System Connections
Table 3-1. Summary of Interconnection Operators (Continued)
Diagram Description
Sys = Sys2 * Sys1
u1 u2y1 y2
u
Sys1
Sys = Sys1/Sys2
u2 u1y2 y1
u
inv(Sys2)
Sys = Sys1\Sys2
u2 u1y2 y1
u
Sys2
Sys = [Sys1;Sys2
u1
u2
Sys1
Sys2
u
Sys2
Sys1
inv(Sys1)
y1
y2
Cascade connection of Sys1 and Sys2 where the output
of
Sys is y
y
and the input is u1.
2
Cascade connection of Sys1 and inverted Sys2 where
Sys = Sys1* inv(Sys2), u=u
y
, and y = y1.
2
Cascade connection of inverted Sys1 and Sys2 where
Sys = inv(Sys1) * Sys2, u = u
y
Parallel connection where y = [y
tied together where
y
u=u1=u.
, and y = y1.
2
]. The inputs are
1;y2
Sys = [Sys1,Sys2
Parallel connection where y = y
+ y
1
and
2
u =[u1;u2].
u1
u
u2
Sys = Sys1'
Sys1
Sys2
y1
y
+
y2
If Sys1 is in state-space form and comprises the matrices
(
A1,B1,C1,D
If
Sys
), Sys comprises (A
1
is a transfer function, it is converted internally
1
',C1',B1',D1').
1
to state-space form.
Xmath Control Design Module 3-2 ni.com
Page 54

Chapter 3 Building System Connections
Table 3-1. Summary of Interconnection Operators (Continued)
Diagram Description
Sys = adj[Sys1]
p1/p2
Sys = inv(Sys1)
If Sys1 is in state-space form and comprises the matrices
(
A1,B1,C1,D
(
–A1',C1',B1',D1'). If Sys
), Sys is the adjoint system and comprises
1
is a transfer function, it is
1
converted internally to state-space form.
Alternate method to create a system, where p1 and p2
are the numerator and denominator polynomials,
respectively; does not allow the use of keywords.
The inverse (pseudoinverse) of a system can be found
using
inv(Sys1). If Sys
inv(Sys1) is the reciprocal of the transfer function.
If
Sys
is a state-space system (A1,B1,C1,D1), then
1
Sys = system(A,B,C,D) where A,B,C,D are defined
is a transfer function,
1
as follows:
D = pinv(D1)
A = A1-B1*D*C1
B = B1*D
C = -D*C1
Dynamic systems also can be flexibly combined with scalars and
compatibly sized matrices using the operators in Table 3-1. A compatibly
sized matrix is one having the same dimensions as the dynamic system’s
D matrix (row size equal to the number of outputs and column size equal
to the number of inputs).
Operations performed with a dynamic system and a matrix M as the
operands internally handle M as a pure-gain system implemented as
system([],[],[],M).
The
* operator can be used with a system and a PDM to find the time
response of the system to the general input data stored in the PDM. For
a detailed description of time simulation in Xmath, refer to the General
Time-Domain Simulation section of Chapter 4, System Analysis.
© National Instruments Corporation 3-3 Xmath Control Design Module
Page 55

Chapter 3 Building System Connections
Linear System Interconnection Functions
afeedback( ), append( ), connect( ), and feedback( ) connect
dynamic systems in state–space or transfer–function form to produce a
larger system in state-space form. The following restrictions apply to all
of these functions:
• Both systems must have the same sample rate.
• Improper dynamic systems (systems with more zeros than poles) are
not allowed.
• If the systems to be connected are in transfer-function form, they must
be expressed in the same dependent variable.
In describing the algorithms used in these connection functions, we will
often refer to the component matrices of a state-space system
B
, C1, and D1.
1
afeedback( )
Sys = afeedback(Sys1,{Sys2})
The afeedback( ) function connects two dynamic systems in a feedback
loop, and obtains a single system representation for the complex loop.
Sys is organized as shown in Figure 3-1. Additional external inputs to the
feedback path are included with outputs from the feedforward path.
Figure 3-1 illustrates that outputs of the feedback path system are included
with forward path outputs
refer to Example 3-1.
. For an example of how to use afeedback( ),
Sys
as A1,
1
e
u
1
y
2
1
+
Sys
1
–
+
Sys
2
+
e
2
Sys
y
1
u
2
Figure 3-1. afeedback System Configuration
Xmath Control Design Module 3-4 ni.com
Page 56

• By default, feedback is defined to be negative.
• The number of outputs from the first system must equal the number of
inputs to the second system.
• The number of outputs from the second system must equal the number
of inputs in the first.
• Both systems must have the same sample rate.
• Improper dynamic systems (systems with more zeros than poles) are
not allowed.
• When only one system is specified, it must be square (it must have an
equal number of inputs and outputs).
Example 3-1 Using afeedback( ) to Connect Two Systems
Sys1 = system([.5,1;0,2],[1,0]',[0,1],0);
Sys2 = system([1,-.2;1,0],[1,0]',[1,1],0);
saf = afeedback(Sys1,Sys2);
Algorithm
If only one system input (Sys1) is provided to afeedback( ), the second
input (
Sys
) defaults to a zero-state system with unity gain. This is
2
analogous to a state-space system with
matrices, and with an identity matrix for D. Notice that you use the Xmath
definition of a non-square identity matrix. In this case, the row dimension
of D equals the number of inputs to
the number of outputs of Sys
state-space matrices of
convention for
Sys
Sys
.
2
Chapter 3 Building System Connections
NULL values for the A, B, and C
Sys
, and the column dimension equals
1
. In the following discussion, you denote the
1
by A1, B1, C1, and D1, and you follow the same
1
The two systems are first internally converted to a state-space form, if
necessary, and subdivided into the A, B, C, and D state-space matrices.
Scaling matrices S1
and S2 are computed for Sys1 and Sys
S
= I + D1D
1
S2 = I + D2D
2
1
as follows:
2
Additionally, you define:
B
= B1/S2 and D1s = D1/S
1s
B2s = B2/S1 and D2s = D2/S
2
1
Matrix right-division problems must be well-posed, with the scaling
matrices S
© National Instruments Corporation 3-5 Xmath Control Design Module
and S2 nonsingular. afeedback( ) displays an error message
1
Page 57

Chapter 3 Building System Connections
if the condition estimate for either matrix is less than eps. For more
information on this condition estimate, refer to the MATRIXx Help for the
Xmath function
Using
feedback loop, you can express its component matrices A, B, C, and D
as combinations of the component matrices you obtained from
Sys
. The full matrices used with two input systems are shown in the next
2
example. In the case of a constant-gain feedback, A, B, C, and D are
computed using only the matrix partitions shown in bold type.
The initial conditions for the systems are appended to each other
columnwise.
rcond( ).
Sys to denote the state-space representation for the complete
Sys
A
A
B
=
B
2sC1
B
1s
B
2sD1B2s
B1sD
–
– B1sC
1B1sD2C1
=
–
2
A2B2sD1C
–
2
2
and
1
⁄ D1sC
–
S
=
D
=
D
1C1
2sC1S2C2
D
1s
2D1s
C
D
afeedback( ) cannot be used with improper transfer functions—systems
D1D
–
2
2s
D
2s
having more zeros than poles—because this algorithm is strictly
state-space.
append( )
Sys = append(Sys1,Sys2)
The append( ) function appends two dynamic systems in a form suitable
for use with the
Xmath Control Design Module 3-6 ni.com
connect( ) function (refer to the connect( ) section). Sys
Page 58

Chapter 3 Building System Connections
is created by appending the inputs, outputs, and states of Sys1 and Sys2.
A larger number of systems can be appended by appending two at a time.
• Both systems must have the same sample rate.
• Improper dynamic systems—systems with more zeros than poles—are
not allowed, because
Sys is represented in state-space form.
The output is a dynamic system in block form as shown in Figure 3-2.
For an example of how to use append( ), refer to Example 3-2.
Example 3-2 Using append( )
s3 = system(makepoly([1,2]), makepoly([1,3,5,0]));
s4 = system(makepoly([1]), makepoly([1,4,4]));
sap = append(s3,s4);
In the following discussion, the component state-space matrices of Sys1 are
denoted by
The algorithm for
representations of
be improper transfer functions (transfer functions having more zeros than
poles). The component A, B, C, and D matrices of
extracted using the
comprising
zero matrix elements span as many rows and columns as necessary.
u
1
u
2
Sys
Sys
1
2
Sys
y
1
y
2
Figure 3-2. Output of a Dynamic System
A
, B1, C1, and D1, and you follow the same convention for Sys2.
1
append( ) is done strictly using the state-space
Sys
and Sys2. For this reason, Sys1 and Sys2 cannot
1
Sys
and Sys2 are
1
abcd( ) function. The A, B, C, and D matrices
Sys are obtained as shown in the following example, where the
© National Instruments Corporation 3-7 Xmath Control Design Module
Page 59

Chapter 3 Building System Connections
connect( )
A
0
A
C
1
= B
0 A
2
C
0
1
= D
0 C
2
append( ) performs a check to make sure both Sys
B
0
1
=
0 B
2
D
0
1
=
0 D
2
and Sys2 have the
1
same sample rate, and adopts this rate for the appended system. Any initial
conditions on the states are also appended columnwise.
Sys = connect(Sys1,{K,M,N})
The connect( ) function performs a general interconnection around a
system. This provides two basic capabilities:
• constant gain feedback
• general input–output interconnection
In its simplest form,
feedback around a system. The keyword
connect( ) can be used to wrap constant gain
K, used to specify feedback gain,
also can be used to specify which outputs are fed back to the input of the
system. By specifying the optional keywords
M and N, you also can specify
input and output gains.
General input–output interconnection is applicable to the block form
system provided by
Parameters used in the
append( ), as described in the append( ) section.
connect command are illustrated in Figure 3-3.
Notice that feedback is defined with a positive sign.
uyy
M
Figure 3-3. Parameters Used with the connect Command
Xmath Control Design Module 3-8 ni.com
u
1
Sys
+
+
u
1
k
K
1
N
Sys
Page 60

Chapter 3 Building System Connections
• By default, feedback is defined to be positive. To enforce negative
feedback, specify
connect(Sys,-K).
• A “selection matrix” has a single 1 in each row; the rest of the row
contains zeros. This is useful for indicating the subset of system inputs
and outputs to be used. In many cases, however, it is simpler to extract
desired inputs and outputs through indexing.
• Both systems must have the same sample rate.
• Improper dynamic systems—systems with more zeros than poles—are
not allowed.
The number of outputs in the combined system is the sum of the number of
outputs from the two systems you are appending. For an example of how to
use gains for the input, the output, and the fed-back data, refer to
Example 3-3.
Example 3-3 Using connect( ) to Perform a General Output-Input Connection
tfsys=system(makepoly([1,2]),makepoly([1,3,0]))
tfsys (a transfer function) =
x + 2
-------
2
x + 3x
initial integrator outputs
0
0
Input Names
-----------
Input 1
Output Names
------------
Output 1
System is continuous
connect(tfsys,0.12,2,1.5)
ans (a state space system) =
A
-3 1
-0.12 0.12
B
0
© National Instruments Corporation 3-9 Xmath Control Design Module
Page 61

Chapter 3 Building System Connections
2
C
-1.5 1.5
D
0
X0
0
0
Algorithm
For the feedback system shown in Example 3-3, you can write the
following system equations:
x·A
xB1u
+= y
1
1
1
C1xD1u
+=
1
Combining these equations with the equation for the positive feedback
input term:
Ky1Mu+=
u
1
and multiplying by the input and output gains M and N, you obtain the
following state-space equations describing the entire system between input
u and output y. If you do not specify any values for the gain matrices,
K defaults to zero (no feedback) and M and N default to appropriately-sized
identity matrices (unity gain on the input and output).
x·A
yNIKD
IKD
–()
+()xB1IKD
1B1
–()
1
1–
KC
1
1–
C1xND1IKD
1
–()
–()
1–
1
1–
Mu+=
1
Mu+=
This algorithm assumes that the closed-loop system is well posed to ensure
that
Sys will be proper. The (I – KD
warning appears if the condition estimate of the term (refer to
less than
eps.
) term must be invertible, and a
1
rcond) is
Xmath Control Design Module 3-10 ni.com
Page 62

feedback( )
Chapter 3 Building System Connections
Sys = feedback(Sys1,{Sys2})
The feedback( ) function connects two dynamic systems together in a
feedback loop as shown in Figure 3-4.
• By default, feedback is defined to be negative.
• Both systems must have the same sample rate.
• Improper dynamic systems (systems with more zeros than poles) are
not allowed.
• When only one system is specified, it must be square (it must have an
equal number of inputs and outputs).
e
u
1
1
+
Sys
1
–
Sys
2
y
1
Sys
Figure 3-4. Feedback System Configuration
For an example of how to implement unity gain feedback using the
feedback( ) function, refer to Example 3-4.
Example 3-4 Implementing Unity Gain Feedback Using feedback( )
tfsys2 = polynomial(-1)/polynomial([-2,-3]);
feedback(tfsys2) # Note that this implements
# negative unity gain feedback
ans (a state space system) =
A
-2 1
1 -4
B
0
1
C
© National Instruments Corporation 3-11 Xmath Control Design Module
Page 63

Chapter 3 Building System Connections
-1 1
D
0
X0
0
0
State Names
-----------
Input Names
----------Input 1
Output Names
-----------Output 1
System is continuous
Algorithm
The system used for the feedback loop, Sys2, is optional. If it is not
specified, a default state-space system is used with
B
, and C2 and an identity matrix for D2 so that unity gain feedback is
2
implemented.
NULL matrices for A
,
2
From Figure 3-4 and the state-space definitions of the systems, you derive
the following equations:
·
x
= A1x1Be1+
1
= C1x1D1e
y
1
·
= A2x2B2y
x
2
= C2x2D2y
y
2
= u1y2–
e
1
Xmath Control Design Module 3-12 ni.com
+
1
+
1
+
1
Page 64

Chapter 3 Building System Connections
The single system resulting from the feedback combination of Sys1 and
Sys2 has u
appended states of
as its input, y1 as its output, and a state vector consisting of the
1
Sys1 and Sys2. Using these five equations to find the
state-space dynamics of the complete system results in the overall system
description.
·
x
1
·
x
= •
·
x
2
A
=
x
x
B1ID2D
1
+
2
B2ID1D
y
= +
1
D1ID2D
ID2D
+()
– B–1ID2D
1B1
B2ID1D
+()
+()
+()
2
ID1D
+()
2
+()
1
1–
D2C
1
2
1–
1
1–
D
1
1–
C1D1ID2D
–
1–
u
1
1
1–
C
1
u
1
+()
A2B2ID1D
–
1
+()
+()
1–
C
2
1–
C
1
2
D1C
•
2
1–
2
x
1
x
2
This algorithm assumes that the closed-loop system is well constructed
(the (I + D
ensures that the output system
) and (I + D1D2) terms must be invertible). This condition
2D1
Sys will be proper.
© National Instruments Corporation 3-13 Xmath Control Design Module
Page 65

System Analysis
This chapter discusses time-domain solutions of the equations underlying
transfer functions and state-space system models, and what these solutions
tell us about the stability of the system. Xmath provides a number of
functions for performing this system analysis and computing the
time-domain system response to both general and specific “standard”
inputs.
Time-Domain Solution of System Equations
Given the state-space equations:
x·Ax Bu+=
yCxDu+=
you obtain:
t
xt() e
At
x
eAτBu t τ–()d τ
+=
0
∫
0
4
letting x
term in the preceding equation defines a convolution integral. Using
represent the convolution operator, the time-domain system output for all
time t ≥ 0 is:
The response Y(s) of the system (with zero initial conditions) to a unit
impulse input δ(t) is H(s), the transfer function representation from the
Transfer Function System Models section of Chapter 2, Linear System
Representation. You accordingly term h(t), the inverse Laplace transform
of H(s), the impulse response.
© National Instruments Corporation 4-1 Xmath Control Design Module
denote any initial conditions on the system states. The integral
0
yt() ce
ht() Ce
At
x0ht()*ut()()+=
At
BDδ t()+=
* to
(4-1)
Page 66

Chapter 4 System Analysis
The time-response of discrete systems is found directly as a summation of
the information from preceding time points in the state and input histories.
Using
* to indicate discrete convolution, you can express the time domain
output as a function of the discrete impulse response:
y
= CAkx0h
k
= CA
h
k
System Stability: Poles and Zeros
After you have general expressions for the response of a system over time,
according to Equations 4-1 and 4-2, you can assess the stability of the
system. For the purposes of system analysis within Xmath, you define a
stable system as one where output does not grow without bound for any
bounded input or initial condition. A necessary and sufficient condition for
this type of bounded-input bounded-output (BIBO) stability is:
∞
ht() M ∞<<
∫
0
Continuous systems are BIBO stable if and only if all poles of the system
are in the left half of the complex plane; discrete systems are BIBO stable
if and only if all poles are within the unit circle in the complex plane.
For a coprime transfer function H(q) (one having no root cancellations
between the numerator and the denominator), the poles are the roots of the
denominator of H(q). H(q) is infinite at these values. Values of q for which
the numerator of H(q) is zero are termed the zeros of the system.
u
()+
*
k
k
k 1–
Bk0>()
Dk0=()
(4-2)
The poles of a system in transfer-function form are identical to the
eigenvalues of the A matrix in that system’s equivalent state-space
representation.
For systems in transfer-function form, zeros are easily defined as the
polynomial roots of the numerator. You define the system matrix for a
state-space system as
=
λIA– B
S λ()
C– D
Xmath Control Design Module 4-2 ni.com
Page 67

poles( )
Chapter 4 System Analysis
and define the zeros of S(λ) as any values of λ for which the system matrix
drops rank. For single-input single-output systems this is equivalent to the
polynomial zeros of the transfer-function numerator. This definition is
somewhat more complex for MIMO systems.
In terms of the dynamic response associated with the poles and zeros of a
system, a pole is said to be stable if the response it contributes decays over
time. If the response becomes larger over time, the pole is said to be
unstable. If the response remains unchanged over time, you describe the
pole that causes it as neutrally stable. All the closed-loop poles of a system
must be stable to describe the system as stable.
p = poles(Sys)
The poles( ) function returns a vector listing all the poles of a system.
If the input system
Sys is in transfer-function form, poles( ) obtains the
poles from the roots of the transfer function’s denominator (which are
automatically stored if the system is in zero-pole format or if the roots have
been previously calculated). If
computed as the eigenvalues of the A matrix. To see how to use
Sys is in state-space form, the poles are
poles( )
with a system in transfer function form, refer to Example 4-1.
Example 4-1 Using poles( ) with a System in Transfer Function Form
H = 0.5*polynomial([-0.36])/...
makepoly([1,2.79,2.74,1.11,0.16]);
poles(H)
ans (a column vector) =
-0.395 + 0.0630476 j
-0.395 - 0.0630476 j
-1
-1
zeros( )
[z,k] = zeros(Sys)
The zeros( ) function finds the invariant zeros, the values of λ at which
R(λ) = 0 and S(λ) lose rank, and gain is returned only for SISO systems
(of a system
© National Instruments Corporation 4-3 Xmath Control Design Module
Sys). If Sys is in transfer function form, the zeros are obtained
Page 68

Chapter 4 System Analysis
directly from the roots of the transfer function numerator. If Sys is in
state-space form, the definition of its zeros arises from the system matrix,
S λ()
=
λIA– B
(4-3)
C– D
and its MIMO transfer function:
R λ() C λIA–()1–BD+=
(4-4)
Defining n as the number of states in the system, p as the number of outputs,
and m as the number of inputs, the normal rank of S(λ) is n + min(m,p).
If the rank of S(λ) equals the normal rank, the system is nondegenerate.
The values of λ, where R(λ) = 0 and S(λ) loses rank, are the invariant zeros
of the system. For degenerate cases in which the normal rank of S(λ) is less
than n + r, the zeros are defined analogously.
If a system is minimal (that is, no other system with lower order and the
same R(λ) exists), these invariant zeros are termed transmission zeros.
When the matrix in Equation 4-4 loses rank for some value λ = λ
exists a vector [x
Thus, there exists an initial state x
values of the input function defined over time t as u
' u0']' of initial states and inputs such that:
0
λ
IA– B
0
C– D
x
0
0=
u
0
such that the output y is zero for all
0
eλt. Such zeros (λ0)
0
, there
0
derive the name transmission zero, because their effect is to block
transmission of the system input to the output.
Note zeros = system zeros = {invariant zeros} ∩ {transmission zeros}.
For an example using
zeros( ) with a state-space system, refer to
Example 4-2. For more details on this topic, refer to [Kai80] and [DeS74].
Example 4-2 Using zeros( ) with a State-Space System
Sys=system([-2.3,0.01,5.1;0,-0.35,-2;0,2,-.35],
[1,.25,.25]',[1.34,0,0],0);
[z,k] = zeros(Sys)
Xmath Control Design Module 4-4 ni.com
Page 69

ans (a column vector) =
-0.98875 + 2.4773 j
-0.98875 - 2.4773 j
k (a scalar) = 1.34P
Algorithm
The algorithm used for state-space zero computation creates a
reduced-order S(λ), using Householder reflections to do the necessary
orthogonal row and column compressions of the state-space matrices.
The eigenvalues of this reduced matrix are then found using QZ. This
method handles the degenerate case and systems with zeros at infinity
[EmV82].
Note zeros( ) also can be used as a matrix building function when used with scalar or
matrix input. For more details on this usage, refer to the MATRIXx Help.
Partial Fraction Expansion
By inverse Laplace or z-transforming a transfer function, you can identify
the impulse response based on knowledge of the system pole and zero
locations. The most convenient form to use in doing this is the partial
fraction expansion of the transfer function. Each term of the partial fraction
expansion has a constant numerator—the residue—and a pole term
denominator, as shown in the following equation, where p
pole, and p
and p5 are a conjugate pair:
4
Chapter 4 System Analysis
is a repeated
2
Hq() C
Each p
r
--------------
qp
+
represents a pole of the system, and the corresponding rk is the
k
residue at that pole. If p
1
1
r
2
---------------------
qp
+()
2
k
r
3
--------------
2
qp
+
3
is a repeated pole, it has M residues, where M is
q α5+
α
4
--------------------------------------- …
+()qp
qp
+()
4
5
r
n
--------------++ ++ ++=
qp
+
n
the multiplicity of the pole. Complex pole pairs have complex residue pairs.
If the transfer function contains a constant (or feedthrough) term, this term
is represented by the scalar value C in the preceding equation. The values
of the residues give the magnitude of the response from the inverse
transform of the respective partial fraction terms. For an example of
dynamic response with partial fraction expansion, refer to Example 4-3.
[Oga70] provides a good reference on partial-fraction expansion for
different orders of complex and real poles. [ChB84] contains a thorough
mathematical treatment of residues.
© National Instruments Corporation 4-5 Xmath Control Design Module
Page 70

Chapter 4 System Analysis
Example 4-3 Dynamic Response through Partial Fraction Expansion
To illustrate how you can examine the stability and dynamic response of a
system using Xmath, start with the open-loop transfer function system
Gs()
-----------------------------------------=
2
s 2+()s 10+()
s
You close a unity feedback loop around this system, as shown in Figure 4-1.
+
V(s)u(s) Y(s)
G(s)
–
Figure 4-1. Constructing the Closed-Loop System Gcl(s) from the Open-Loop System
G(s), with Input U(s) and Output Y(s)
You can derive the expression for the closed-loop transfer function Gcl(s):
s 0.5+()
G
cl
(s)
Vs() Us() Ys()–=
Ys() Gs()Vs()= G
⎛⎞
⎝⎠
Ys()
s()
-----------
cl
Us()
Gs()
---------------------==
1 Gs()+
Calculate the closed-loop transfer function.
Note You convert the state-space system returned by feedback( ) to a transfer function
using
check( ).
sys = polynomial(-0.5)/polynomial([0,0,-2,-10]);
syscl=feedback(sys);
[,syscl] = check(syscl,{tf, convert})
syscl (a transfer function) =
(s + 0.5)
------------------------------------------------ 2
(s + 1.95266)(s + 10.0118)(s + 0.0354992s + 0.02...
initial integrator outputs
0
0
Xmath Control Design Module 4-6 ni.com
Page 71

Chapter 4 System Analysis
0
0
Input Names
----------Input 1
Output Names
-----------Output 1
System is continuous
You can examine the stability of Gcl(s) by representing it as a sum of partial
fractions, using the
residue(syscl)
ans (a pdm) =
-------------------------+-----------------------
-0.0177496 - 0.158936 j | Order 1 0.0180045 + ...
-0.0177496 + 0.158936 j | Order 1 0.0180045 -...
-1.95266 | Order 1 -0.0478224
-10.0118 | Order 1 0.0118134
residue( ) function.
Poles |
residue( )
returns a PDM with the poles as the domain elements, and the
associated dependent matrices being the residue at each pole. It also can be
expressed in the following form:
s()
G
cl
0.0478–
------------------------
s 1.95+()
0.0118
------------------------------++=
s 10.012+()
0.036 s 0.01775+()0.16065 0.1589()+
----------------------------------------------------------------------------------------------
s 0.01775+()
2
0.1589()
+
2
Using a table of inverse Laplace transforms to convert this expression to the
transient time response rather than a complex frequency response, you can
rewrite the time response G(t) as:
Gt() 0.0478e–
1.95t–
0.0118e
+=+
0.018t–
e
10.012t–
0.036 cos(0.1589t) 0.160 sin(0.1589t)+()
Notice from this example that because all the poles are in the left half plane,
the response each contributes is an exponential which decays with time, so
this closed-loop system is stable.
© National Instruments Corporation 4-7 Xmath Control Design Module
Page 72

Chapter 4 System Analysis
Figure 4-2. Transient Response of the Closed-Loop System as a Function of Time
You also can calculate the impulse response directly with
t = [0 : 0.1 : 350 ];
hi = impulse(syscl,t);
plot(hi, { xlab = "Time (sec)", ylab = "Transient
Response"})
Calculating the impulse response gives you the transient response shown in
Figure 4-2.
Notice that this response actually takes quite a while to die out because of
the small time constants, which correspond to small pole values, in the
exponential terms. This is why poles with a small magnitude are frequently
called “slow” poles, whereas poles with a large magnitude contribute a
response which decays quickly and thus are called “fast” poles.
residue( )
[rp,C] = residue(sys,pls,ordr,{isVector,tol})
The residue( ) function calculates the nth-order residue of a
transfer-function form system at any of its poles, including Infinity.
It returns a PDM
dependent matrices contain the residues corresponding to each pole.
pls and ordr are optional inputs allowing you to specify the pole values
Xmath Control Design Module 4-8 ni.com
rp where domain contains the pole locations and where
Page 73

and orders for which the residue(s) should be found. If a user-specified
value for
pls is not actually a pole of the system or if the order requested
is greater than the multiplicity of the pole, the corresponding residue is
returned as zero.
C contains the value of the constant term.
Example 4-4 uses the transfer function from Example 2-10, Verifying a
Discretization Using makecontinuous( ).
Example 4-4 Calculating the Residues of a System
G= system(0.5*polynomial([-0.36]),
polynomial([-1,-1,-0.395+0.06305*jay,
-0.395-0.06305*jay]));
Rp=residue(G)
Rp (a pdm) =
Poles |
-------------------+-----------------------------
-0.395 - 0.06305 j | Order 1 0.738493 - 0.2277 j
-------------------+-----------------------------
-0.395 + 0.06305 j | Order 1 0.738493 + 0.2277 j
-------------------+-----------------------------
-1 | Order 1 -1.47699
-------------------+-----------------------------
Chapter 4 System Analysis
| 2 0
| 2 0
| 2 -0.864864
combinepf( )
Sys = combinepf(Rp,C,{var})
combinepf( )
combining partial fractions into a single transfer function. It expects a PDM
of the form shown in Example 4-4 as input.
Use
combinepf( ) to convert partial fractions to a transfer function.
Using the variable
G2=combinepf(Rp, {var = "s"})
G2 (a transfer function) =
---------------------------
2 2
© National Instruments Corporation 4-9 Xmath Control Design Module
reverses the operation performed by residue( ),
Rp you obtained in Example 4-4:
0.5s + 0.18
Page 74

Chapter 4 System Analysis
(s + 1) (s + 0.79s + 0.16)
initial integrator outputs
0
0
0
0
Input Names
----------Input 1
Output Names
-----------Output 1
System is continuous
Note G2
matches the system G where residues were computed in Example 4-4.
General Time-Domain Simulation
When modeling a dynamic system and trying to determine its response to
the input values it is likely to receive in use, you generally will want to
simulate system behavior with more general input signals than the zero or
step inputs used in
use the
* operator between a dynamic system object and a PDM containing
the input data you want to use in the simulation.
Borrowing from the standard frequency response notation for a system
where:
Xmath defines the operation system*PDM as a time domain simulation.
Thus for any dynamic system
u representing the external stimulus as a function of time, the operation
y =
Sys × u creates a PDM y which contains the outputs of the system as
a function of time.
For a dynamic system with n
defined to be n
u should be m × 1 × p, where p is the number of time points in u.
initial( ), impulse( ), and step( ). To do this,
ys() Hs() us()×=
Sys (continuous or discrete) and for a PDM
outputs and nu inputs, the input vector is
y
× 1 and the output vector is ny× 1. Thus the input PDM
y
Xmath Control Design Module 4-10 ni.com
Page 75

Often it is desirable to run several simulations with different inputs. In this
case, you can define a PDM whose columns contain the input vectors for
the different simulations. Then u will be n
number of different simulations to be run. The resulting y will be
n
× q × N
y
, with each column of the PDM corresponding to a different
samp
simulation.
The input PDM must have a regular domain—that is, the interval between
each domain value and the one succeeding it must be the same over all
points in the domain. If the system is discrete, the domain intervals must be
equal to the system’s sampling period. If the system is continuous, it is
discretized using the exponential (zero-order hold) method, with the
sampling interval set equal to the input domain interval spacing.
Note For accurate results, you need to make sure this sampling interval is small enough
that discretization effects are negligible.
The next step is to create a general signal and store it as a PDM where
domain is time as shown in Example 4-5. Because you are using a SISO
system, this input is a single-channel PDM.
Example 4-5 Performing a General Time-Domain Simulation
t = 0:0.1:15;
osig = ones(1,30);
sig = [0*osig,0.5*osig,osig,0.5*osig,0*ones(1,31)];
U = pdm(sig,t);
× q × N
y
Chapter 4 System Analysis
, where q is the
samp
Create the system:
Sys = system([-2.3,0.01,5.1;0,-0.35,-2;0,2,-.35],
[1,.25,.25]',[1.34,0,0],0);
and perform the simulation:
Y = Sys*U;
To see how well the system tracks the input signal, plot the input,
as follows, and the system’s response, shown in Figure 4-3.
plot ([U,Y], {legend = ["Input Signal",
"System Response"],line_color = "black",
xlab = "Time (sec)", ylab = "Amplitude"})
© National Instruments Corporation 4-11 Xmath Control Design Module
Page 76

Chapter 4 System Analysis
Figure 4-3. System Time Response to a Series of Step Signals
The (system)*(PDM) construct for performing time-domain simulation
is used analogously no matter how many inputs the system has. For a
multi-input, multi-output system, the number of rows of the input PDM
must match the number of inputs of the system. For an example of general
time-domain simulation for a MIMO system, refer to Example 4-6.
Example 4-6 General Time-Domain Simulation for a MIMO System
sys = system([0,1,0;0,0,1;-2,-4,-3],
[0,1;1,0;-1,1],[0,1,-1;1,2,1],[]);
u = pdm([sin(-3*pi:0.01:3*pi);
cos(-3*pi:0.01:3*pi)],{rows=2,columns=1});
y = sys*u;
Xmath Control Design Module 4-12 ni.com
Page 77

Impulse Response of a System
An impulse input to a system is defined somewhat differently depending on
whether the system is discrete or continuous. For a continuous-time system,
an impulse is a unit-area signal of infinite amplitude and infinitely small
duration occurring at time t = 0, and having value zero at all other times.
For a discrete system, an impulse can be thought of as a physical pulse
which has unit amplitude at the first sample period and zero amplitude for
all other times.
The Laplace transform of the continuous-time impulse—often referred to
as δ(t)—is 1. Thus, the Laplace transform of a output of a system to a unit
impulse is merely its transfer function H(s), as discussed in the
Time-Domain Solution of System Equations section.
A similar definition, using the z-transform, can be made for the
discrete-time impulse response. However, the values of the impulse
response of a discrete system also have the property that they define the
Markov parameters for that system. Based on the state-space representation
of the system, these parameters are defined as the values
Chapter 4 System Analysis
impulse( )
CA
i 1–
Bi, 12, …},={=
h
i
These parameters are uniquely determined by the transfer function of the
system [Kai80]:
∞
Hz() CzI A–()
==
1–
Bh
i 1=
∑
i–
z
i
and they also are the terms of the discrete impulse response.
y = impulse(Sys,t)
The impulse( ) function computes the impulse response of a dynamic
system. The time vector, t, is an optional input. If not specified, a default
time range will be computed using
deftimerange( ). Refer to the
deftimerange( ) section. For a continuous-time system, the impulse
response is calculated at each point in the time vector. For a discrete
system, the first n Markov parameters are returned, where n is the length
of the time vector (which must be regularly spaced).
© National Instruments Corporation 4-13 Xmath Control Design Module
Page 78

Chapter 4 System Analysis
Note A continuous system and its discrete-time equivalent (computed using the
impulse-invariant z-transform) have impulse responses differing only by a factor of 1/dt.
impulse( ) computes the impulse response by using the B matrix from
the system’s state-space representation as the initial conditions. A system
with n
inputs has ni initial conditions, each of which is set up as a column
i
of the B matrix. The impulse response is then a time-domain simulation of
the system using an appropriately-sized zero input.
The output
matrix in
columns as there are inputs of
impulse response at output
y
is a PDM where domain is the time vector t. Each dependent
y
has as many rows as there are outputs of Sys, and as many
Sys. Thus the (
i
from input j at time k. In Figure 4-4, where
all the poles of this continuous system are stable (in the left half of the
complex plane), the impulse response eventually dies out to zero. For an
example of a 15-second impulse response of a stable state-space system,
refer to Example 4-7.
Example 4-7 15-second Impulse Response of a Stable State-Space System
Sys = system([-2.3,0.01,5.1;0,-0.35,-2;0,2,-.35],
[1,.25,.25]',[1.34,0,0],0);
Yt = impulse(Sys,0:0.1:15);
plot (Yt, {xlab = "Time (sec)",
ylab = "Amplitude"})
i,j,k
) element of y is the
Xmath Control Design Module 4-14 ni.com
Page 79

Chapter 4 System Analysis
Figure 4-4. 15-Second Impulse Response
deftimerange( )
tvec = deftimerange(Sys)
deftimerange( ) computes a regular time vector (in units of seconds)
that can be used in time-domain simulations to observe the effects of all or
most of the input system’s dynamics, as indicated by pole and zero location.
Within
poles( ). For continuous-time systems, the poles are scaled by a factor
deftimerange( ), the poles of the system are obtained using
of 1/2π (to convert from radians) and the time constant (in seconds) is
obtained as the reciprocal of four times the value of the pole with the
maximum absolute value (the “fastest” pole). For discrete-time systems,
the logarithm of the poles is taken and scaled by the sampling interval. The
sampling interval is automatically used as the step size for the
tvec time
vector. If all system poles are integrators, the step size defaults to 0.01.
© National Instruments Corporation 4-15 Xmath Control Design Module
Page 80

Chapter 4 System Analysis
The maximum time, Tmax, is computed as follows, with vP denoting the
vector of scaled poles and
Tmax=abs(log(.05)/...
max(real(vP(find(real(vP)<>0)))))
If Tmax == null # all poles purely imaginary
Tmax=100*dt
endIf
Tmax=max(Tmax,10*dt)
tvec=0:dt:Tmax
dt the period:
Though deftimerange( ) calls minimal( ) to remove any pole-zero
cancellations, it does not consider the location of the system zeros in
computing the time vector. As a result, if
a decade beyond its maximum or minimum poles, the effects of these zeros
may not be apparent in a time response calculated using
supply your own time vector to
impulse( ), initial( ), and step( )
in these cases.
System Response to Initial Conditions
Sys has zeros that are more than
tvec. You should
It is often assumed that the states of a system have zero initial conditions,
and the
X0 field of a state-space system object correspondingly defaults to
zero. In many cases, however, you need to examine the system response to
a given set of nonzero initial conditions; a common system design goal is
that this response become zero (or negligibly small) as quickly as possible.
The Xmath function
initial( ) allows you to do this. You also can use
superposition to calculate forced initial condition response.
initial( )
Y = initial(Sys,T,{X0})
The initial( ) function computes the unforced response of a system
from its initial conditions. By default it uses the initial conditions stored
with the input system itself, but an alternate set of initial conditions can be
specified as the keyword
sampling period of the system if it is discrete) also can be specified, or
initial( ) can compute a default time vector internally using
deftimerange( ).
Xmath Control Design Module 4-16 ni.com
X0. A time vector (with spacing equal to the
Page 81

The simulation performed in initial( ) uses an input of zero for each
point in the time vector. The output
Y is a PDM where domain is the time
vector.
By varying the initial values of the states individually, you can determine
which is the most sensitive. For an example using
determine the sensitivity of the states, refer to Example 4-8.
Example 4-8 Using initial( ) to Determine the Sensitivity of the States
Sys = system([-2.3,0.01,5.1;0,-0.35,-2;0,2,-.35],
[1,.25,.25]',[1.34,0,0],0);
ic1 = initial(Sys, 0:.1:15, {X0 = [1,0,0]});
ic2 = initial(Sys, 0:.1:15, {X0 = [0,1,0]});
ic3 = initial(Sys, 0:.1:15, {X0 = [0,0,1]});
plot ([ic1,ic2,ic3], {xlab = "Time (sec)",
legend = ["State 1", "State 2", "State 3"],
ylab = "Amplitude"})
Chapter 4 System Analysis
initial( ) to
Figure 4-5. 15-Second System Response to Unity Nonzero Conditions
at Each of the States
In Figure 4-5, notice that the value of the second state has the highest
maximum value and takes the longest to “zero out.”
© National Instruments Corporation 4-17 Xmath Control Design Module
Page 82

Chapter 4 System Analysis
Step Response
The response of a system to a unit step input is one of the most commonly
used measures of how well a given control system’s output tracks the
system input. A unit step is a time signal which is zero up until the
beginning of the time period of interest, and one thereafter. This indicator
is popular because it is easy to compute and interpret. It also is
mathematically possible to calculate the response to any input if the
response to a unit step is known. The performance measures associated
with the step response are as follows:
• Delay time (t
)—The time required for the response to reach half its
d
final value.
• Rise time (t
)—The time required for the response to rise from 10%
r
of its final value to 90% of its final value.
• Peak time (t
)—The time required for the response to reach the peak
p
value of its first overshoot.
• Maximum overshoot (M
)—The response value which most exceeds
p
unity, expressed as a percent.
• Settling time (t
)—The time required for the response to reach 5% of
s
its final value.
These performance measures are obtained easily with a few lines of
MathScript, as demonstrated in Example 4-9. For a plot of these
performance measures, refer to Figure 4-6.
step( )
Y = step(Sys,T)
The step( ) function computes the unit step response of a dynamic
system over a time period which can be specified with the optional time
vector
T. If T is not specified, step( ) computes a default time vector
using
deftimerange( ).
The output,
matrices have row size equal to the number of inputs and column size equal
to the number of outputs.
Example 4-9 Performance Measurements for a Step Response
Y = step(Sys, 0:.1:15);
plot (Y,{x_lab = "Time (sec)",
ylab = "Amplitude", xinc=1, yinc=.1})
Xmath Control Design Module 4-18 ni.com
Y, is a PDM where domain is the time vector and dependent
Page 83

Chapter 4 System Analysis
From Figure 4-6 you see that the delay time (td) is about 0.5 seconds,
the rise time (t
settling time (t
) is 0.8 seconds, the peak time (tp) is 1.6 seconds, the
r
) is about 5.5 seconds, and the maximum overshoot (Mp)
s
is about 24%.
Mp
ts
tp
tr
td
Figure 4-6. 15-Second Step Response, Showing Performance Measures
You can compute these values from the 151-point step response data vector
Y and substantiate your estimates.
First, you find the final value of the response:
Yf = makematrix(Y(151));
Get indices of all values > half the final value:
gt_half = find(Y > 0.5*Yf);
Time corresponding to first index in gt_half:
td = domain(Y(gt_half(1,1)))
td (a scalar) = 0.5
Get indices of all values > 0.1 * final value:
gt_1_10 = find(Y > 0.1*Yf);
© National Instruments Corporation 4-19 Xmath Control Design Module
Page 84

Chapter 4 System Analysis
Get indices of all values > 0.9 * final value:
gt_9_10 = find(Y > 0.9*Yf);
Subtract domain values to get time duration:
tr = domain(Y(gt_9_10(1,1)))-...
domain(Y(gt_1_10(1,1)))
tr (a scalar) = 0.8
Get peak value of response:
maxY = max(Y, {channels});
Index and time corresponding to peak value:
maxtp = find(Y == maxY);
tp = domain(Y(maxtp(1)))
tp (a scalar) = 1.6
Convert peak value to a percentage > 1:
Mp = round(10000*(maxY-1))/100
Mp (a scalar) = 23.21
Reformat the step response in reverse time:
Yrev = Y(151:-1:1);
Response values within 0.05 * final value:
gt_05 = find(Yrev <= 0.95*Yf | Yrev >= 1.05*Yf);
Time value of first point within bound:
ts = domain(Yrev(gt_05(1,1)))
ts (a scalar) = 5.1
Xmath Control Design Module 4-20 ni.com
Page 85

Classical Feedback Analysis
The open-loop systems analyzed in Chapter 4, System Analysis, generally
perform in a satisfactory manner only if the system model is very accurate
and there are no external disturbances. These conditions usually are not
met. Feedback presents an effective way to control the output of a system.
The functions in this chapter address the problem of suitably controlling
an open-loop plant through output feedback. They are most often applied
to single-input, single-output (SISO) systems. With the exception of
rlocus( )
multi-input, multi-output (MIMO) systems.
Feedback Control of a Plant Model
The key principle of feedback is that the output of a system be fed back,
compared to a reference or “desired” output value, and then the error
between the two terms used to correct the system’s output so that it matches
the reference. The basic diagram of a feedback control system is shown in
Figure 5-1.
and bode( ), these functions also can be used with
5
G(s)
+
–
(s)
G
cl
Figure 5-1. Feedback Control System Block Diagram
The output of the open-loop system is KH(s); the output of the closed-loop
system shown in Figure 5-1 is given by:
Ys()
-----------
Rs()
© National Instruments Corporation 5-1 Xmath Control Design Module
U(s) Y(s)R(s)
KH s()
-------------------------=
1 KH s()+
H(s)
K
Page 86

Chapter 5 Classical Feedback Analysis
Because open-loop systems are generally easier to study and model than
closed-loop systems, you want to design closed-loop systems based on
information obtainable from the open-loop system.
Root Locus
In Chapter 4, System Analysis, you learned how the location of the system
poles and zeros affects the stability of the system, so an effective feedback
control design should take into account the closed-loop pole and zero
locations. If you represent the open-loop transfer function H(s) as the
quotient of the numerator and denominator as follows:
you can rewrite the characteristic equation of the closed-loop system as
follows:
This restates the fact that the open-loop system poles (which correspond
to K = 0) are the roots of the transfer function denominator, D(s). As K
becomes large, the roots of the previous characteristic equation approach
the roots of N(s)—the zeros of the open-loop system—or infinity. For a
closed-loop system with a nonzero, finite gain K, the solutions to the
preceding equation are given by the values of s where both of the following
are true:
Hs() Ns()Ds()⁄=
1 KH s()+ Ds() KN s()+ 0==
KH s() 1=
The root locus is a plot in the real-imaginary axis showing the values
of s that correspond to pole locations for all gains K, starting at K = 0
(the open-loop poles) and ending at K = ∞.
Root locus plots provide an important indication of what gain ranges can
be used while keeping the closed-loop system stable. As discussed in the
System Stability: Poles and Zeros section of Chapter 4, System Analysis,
continuous-time systems are stable as long as their poles are in the left half
of the s-plane (have a negative real part) and discrete-time systems are
stable as long as their poles remain within the z-plane unit circle.
The Xmath root locus-plotting utility exists for SISO systems only, though
either state-space or transfer function models can be specified.
Xmath Control Design Module 5-2 ni.com
∠ Hs() 2k 1+()π±= k 01…,,=()
Page 87

Chapter 5 Classical Feedback Analysis
rlocus( )
rlroots=rlocus(sys,K,{xmin,xmax,ymin,ymax,pattern,graph})
rlocus(sys,{xmin,xmax,ymin,ymax,pattern})# (interactive)
The rlocus( ) function computes and draws root locus diagrams for
continuous-time and discrete-time SISO systems. The first syntax, in
which a vector of gain values is specified, generates a plot showing the
closed-loop pole locations for each gain. In the Graphics window, the
complete locus is drawn as a solid line, with
zeros and
xs delineating open-loop pole locations. The second syntax
brings up a window through which you can interactively modify the
closed-loop gain and see the corresponding pole locations change on
the locus.
os marking the location of
A grid showing pole stability range can be invoked with the
keyword. The optional keywords specifying maximum and minimum x and
y values can be used to restrict the range of the selected s- or z-plane. These
can be changed interactively if the interactive syntax is used. Click
RECOMPUTE to activate rate changes.
Example 5-1 shows how to plot the rool locus created in Example 2-9,
A Comparison of Several Discretization Methods.
Example 5-1 Plotting a Root Locus
H = system(0.5*polynomial([-0.36]),
makepoly([1,2.79,2.74,1.11,0.16]));
You can create and graph a root locus, scaling the range of the
real-imaginary plane as follows:
rlocus(H, {xmin=-2, xmax=0, ymax=0.5, ymin=-0.5})
These functions give the results shown in Figure 5-3. The large xs on the
plot correspond to the open-loop pole locations you found for this system
in Example 4-1, Using poles( ) with a System in Transfer Function Form,
and the zeros correspond to the single zero at –0.36.
pattern
© National Instruments Corporation 5-3 Xmath Control Design Module
Page 88

Chapter 5 Classical Feedback Analysis
Figure 5-2. Root Locus of H for Gain K = 0.07
This syntax allows you to vary the root locus gain through an interactive
form. Within this form, you can change the gain value through either a
slider or an editable label where value corresponds to the current slider
position. The slider range is automatically updated when the slider is
moved to its maximum or minimum value, or when a gain value outside
the current slider limits is entered into the editable label.
Xmath Control Design Module 5-4 ni.com
Page 89

Chapter 5 Classical Feedback Analysis
As the gain varies, small ✱’s appear on the locus indicating the closed-loop
pole location for that choice of gain. The locus shown in Figure 5-2 shows
that for small gain values the closed-loop system is stable, with all of its
roots in the left half of the complex plane.
Frequency Response and Dynamic Response
The frequency response of a dynamic system is the output, or response, of
a system given unit-amplitude, zero-phase sinusoidal input. A sinusoidal
input with unit amplitude and zero phase, and frequency ω produces the
following sinusoidal output:
freq( )
Hjω() A ω()e
=
jφω()
where A is the magnitude of the response as a function of ω, and φ is the
phase. The magnitude and phase of the system output will vary depending
on the values of the system poles, zeros, and gain. In many practical
engineering applications, the system poles and zeros are not precisely
known. Because the frequency response can be determined experimentally,
undesirable parts of the system’s frequency response then can be improved
by adding known compensation to the system.
H=freq(Sys,F,{Fmin,Fmax,npts,track,delta})
The freq( ) function calculates the frequency response of a system in
several different ways, depending on the system representation. For
continuous-time transfer functions, the frequency response H(ω) at a given
frequency ω is obtained by substituting the complex frequency value jω for
qin the following equation. For discrete-time transfer functions, the value
jwT
e
, with T the system sampling interval, is substituted for q instead.
Sys q()
+()…qz
qz
1
---------------------------------------------=
+()…qp
qp
1
+()
m
+()
n
For continuous-time state-space systems, the basic method for finding
frequency response is to substitute different frequency values, represented
by ω, into the following equation:
1–
Hjw() CjwI A–()
© National Instruments Corporation 5-5 Xmath Control Design Module
BD+=
Page 90

Chapter 5 Classical Feedback Analysis
For discrete-time state-space systems with a sampling interval of T, the
frequency response for each frequency point ω is shown in the following
equation:
Hjw() Ce
jwT
1–
IA–()
BD+=
Algorithm
The algorithm, based on [Lau86], uses a Hessenberg decomposition to
simplify the previous equations and is quite robust. It finds matrices P and
H such that A = PHP', where PP' = P'P = I and H is a Hessenberg matrix,
and substitutes for A. Because H is zero only below the first subdiagonal,
the number of operations needed to evaluate the response expression is
proportional to the square of the size of A.
freq( ) allows you to prespecify frequency ranges of interest, or it can
generate a representative frequency range from minimum and maximum
frequencies you specify. It then evaluates the complex frequency response
over those frequencies, using specialized algorithms to do this efficiently.
You can specify either a complete set of frequency points (the optional
input
F) or a range of frequency points (the keyword pair Fmin and Fmax)
at which to evaluate the response. The
tracking will be used to determine the values of the frequencies between
Fmin and Fmax. The number of intermediate frequency points produced
using
track varies depending on the system and the Fmin and Fmax you
choose. Alternately, you can use the
number of logarithmically-spaced frequency points you want computed.
Specifying
track invokes an algorithm which tracks the phase of the
frequency response to make sure that all peaks and valleys are included in
the computed response. The
delta keyword indicates the amount of phase
change (measured in degrees) to which the response evaluation should be
sensitive. If phase change between two adjacent frequency points exceeds
this delta, closer frequencies are used until either the phase change is less
than
delta or a maximum number of iterations is reached. Evaluation is
forced at key frequency points which include the poles and the points lying
halfway between adjacent poles.
track keyword indicates that phase
npts keyword to specify the exact
freq( ) returns a PDM having the frequency range as its domain. The
dependent matrices of the frequency response PDM have as many rows as
the system has outputs, and as many columns as the system has inputs. For
MIMO systems, the (i,j) element of a dependent matrix is thus interpreted
as the frequency response from input j to output i. This frequency response
forms the core of the classical control design tools discussed in this chapter.
Xmath Control Design Module 5-6 ni.com
Page 91

Chapter 5 Classical Feedback Analysis
For an example of frequency response of a simple system, refer to
Example 5-2.
Given the single-input, single-output open-loop plant in Figure 5-3, where
U(s) and Y(s) are the frequency domain input and output, respectively, you
can examine its response characteristics and see how you can improve them
using the frequency-response based control design functions in this chapter.
U(s) Y(s)
Figure 5-3. Representation of the Open-Loop System
Example 5-2 Frequency Response of a Simple System
You can create the system directly in transfer function form:
sys = system(polynomial(-0.5),
polynomial([0,0,-2,-10]));
and then obtain the frequency response directly:
H = freq(sys,{Fmin = 0.01,Fmax = 10,npts = 150});
freq( ) also can be called with a predefined vector of frequency points,
or you can specify that phase tracking be used to compute frequency points
between the minimum and maximum frequencies. The number of
frequency points used with tracking will vary. To illustrate:
H = freq(sys,{Fmin=0.01,Fmax=10,track,delta=.5});
size(H)
ans (a row vector) = 1 1 335
The dynamics of this system are adequately reflected in both frequency
responses. However, systems having more closely-placed pole and zero
locations are good candidates to use with the
(s + 0.5)
2
(s + 2)(s + 10)
s
track keyword.
Bode Frequency Analysis
While freq( ) provides you directly with the frequency response, other
tools in the Control Design module can give you more insight into what the
open- and closed-loop frequency responses of a system imply about the
system behavior. Bode plots of system frequency response are useful
© National Instruments Corporation 5-7 Xmath Control Design Module
Page 92

Chapter 5 Classical Feedback Analysis
because they can be used to assess the relative stability of a closed-loop
system given the frequency response of the open-loop system. It should be
noted that the open-loop system should be stable and minimum phase,
having no right-half plane poles or zeros, for this type of analysis [Oga70].
The following complex frequency response:
H ω() A ω()e
=
jφω()
can be separated into two parts, which are both functions of the frequency:
• ω: the magnitude, A(ω)
• the phase, φ
The magnitude can be obtained as the absolute value of the response,
whereas the phase is obtained from the four-quadrant arctangent of the
response.
The standard Bode format comprises two subplots:
• The upper plot shows the decibel gain (the common logarithm of
the magnitude, multiplied by 20) plotted against the logarithm of the
frequency. Logarithmic (decibel) plots are a particularly useful tool
for indicating magnitude response because the multiplication of
magnitudes is shown as the sum of their logarithms, thus allowing
you to determine the system response with varying gains quickly.
• The lower plot shows the phase, in degrees, as a function of the
logarithm of the frequency. For both the gain and phase plots,
logarithmic frequency scaling is used because it allows a wide range
of frequency-dependent behavior to be displayed simultaneously.
Because the gain and phase plots are additive for systems cascaded in
series, Bode plots of an open-loop plant and potential compensators can be
added to determine the frequency-response characteristics of the complete
system. The plots also illustrate system bandwidth, as the frequency at
which the output magnitude is reduced by three decibels, or attenuated to
approximately 70.7% (a factor of of its original value.
22⁄()
Bode plots also provide an important aid to evaluate how stable—or,
more specifically, how close to instability—a closed-loop system is. As
discussed in the System Stability: Poles and Zeros section of Chapter 4,
System Analysis, for the continuous case, the closed-loop poles of a stable
system lie in the left half of the complex plane.
Xmath Control Design Module 5-8 ni.com
Page 93

Chapter 5 Classical Feedback Analysis
Referring to the entire closed-loop system in Figure 5-1 as Gcl, the poles of
G
are the roots of its denominator—that is, the values of s such that either
cl
of the following is true:
1 Gs() 0=+
Gs() 1–=
The magnitude (absolute value) of G(s) is 1 at each pole of G
(s), and the
cl
phase (given by the four-quadrant arctangent) of G(s) is –180° at each pole
of G
(s). For any neutrally stable system, the frequency response
cl
magnitude will be equal to 1 (or 0 dB) and the phase will be –180° at the
frequency at which the closed-loop roots fall on the imaginary axis.
This analysis is often applied to systems where G(s) consists of a gain, K,
and a dynamic model, H(s), in series (as shown in Figure 5-1). For cases
in which increasing the gain leads to system instability, the system will be
stable for a given value of K if the magnitude of KH(s) is less than 1 at any
frequency at which the phase of KH(s) is 180° [FPE87]. You can measure
how close a system is to instability by examining the value of the magnitude
and phase at these critical values. These measures are termed the gain
margin and the phase margin. These are important because real-life models
are prone to uncertainties and changes in gain or phase. Typically, systems
become unstable with gains that are too high or have too much phase lag.
Refer to Example 5-4.
The gain margin indicates by how much the gain can be raised before the
closed-loop system becomes unstable. This critical gain value at which
instability results can be thought of in several ways. As described
previously, this gain value results in the closed-loop poles of the system
being located on the imaginary axis. In terms of the Nyquist stability
criterion, discussed in more detail under
nyquist( ), this is the gain value
at which the Nyquist plot crosses the negative real axis, where the phase is
–180 degrees. The gain margin itself is the reciprocal of this value,
expressed in decibels.
The Bode plot provides a clear visual interpretation of the gain margin as
the number of decibels by which the gain exceeds zero when the phase
equals –180 degrees. The phase margin is the difference between the phase
at the point where the response crosses the unit circle (has unit magnitude,
or a gain of 0 decibels) and –180 degrees. These margins provide a measure
of how near the closed-loop system roots are to instability. Depending on
the complexity of the system, there may be multiple gain and/or phase
margins.
© National Instruments Corporation 5-9 Xmath Control Design Module
Page 94

Chapter 5 Classical Feedback Analysis
Referring to Figure 5-4, notice the additional lines drawn on the plots at
the frequencies where the gain crosses the 0 dB line and where the phase
crosses the 180° line. When the gain crosses the 0 dB line, the phase is
about –168°, 12° away from –180°. So the phase margin is approximately
12°. Similarly, when the phase crosses the –180° line, the gain is about
–44 dB (44 dB from the 0 dB line), and thus the gain margin is 44 dB.
bode( )
[H,dB,Phase] = bode(Sys,{F,keywords})
The bode( ) function uses freq( ) to compute the frequency response
of a system. By default, the
overridden. Refer to the freq( ) section for more details. When the
frequency response
in degrees are computed as follows:
dB=20*log10(abs(H); phase=(180/pi)*atan(H)
bode( ) then produces the standard Bode format plots showing response
magnitude and phase as functions of frequency. Unlike
does not require a frequency range or a pair of maximum and minimum
frequencies; if no range is specified, it uses
calculate a default frequency range.
freq( ) keyword track is on, but it can be
H is found the decibel magnitude and the phase angle
freq( ), bode( )
deffreqrange( ) to
bode( ) often generates more than one set of plots. For MIMO systems, a
plot is made for each output with multiple curves, one per input. If there are
multiple outputs, a menu will appear which allows you to select an input to
view.
If you want to see the response of the system from Example 5-2 to input
frequencies ranging from 0.01 Hz to 10 Hz, you can analyze a frequency
response using
Example 5-3 Analyzing a Frequency Response Using bode( )
sys = polynomial(-0.5)/polynomial([0,0,-2,-10]);
[H,dB,phase]=bode(sys,
{Fmin = 0.01,Fmax=10,npts = 300,!wrap})
bode( ), as shown in Example 5-3.
You obtain the gain and phase plots as shown in Figure 5-4.
Xmath Control Design Module 5-10 ni.com
Page 95

Chapter 5 Classical Feedback Analysis
gain margin
phase margin
Figure 5-4. Bode Plot Showing System Gain and Phase Margins
These plots illustrate how the location of the system poles and zeros shapes
the gain and phase curves. Each pole contributes a factor of –20 dB per
decade (frequency interval from ω to 2ω). The two poles at zero cause the
magnitude response of the system to start with a slope of –40 dB/decade.
The zero at 0.5 radians/sec (about 0.08 Hz) contributes a factor of
approximately 20 dB. These gain magnitude factors add, so the slope of the
gain plot changes from –40 dB/decade to about –20 dB/decade until you
begin to see the influence of the poles at 2 radians/sec. (0.318 Hz) and
10 radians/sec (1.59 Hz), each of which contribute another –20 dB/decade
to the slope of the magnitude plot.
The phase is a function only of the pole and zero locations. Notice that in
creating the phase plot with
bode( ), you specified the !wrap keyword.
This created a phase plot where range goes down to the full angle value of
the phase, rather than wrapping the phase between +
180°. Each pole at zero
contributes –90° of phase.
The remaining poles are called first-order poles because they are of the
following form:
sp
+
n
© National Instruments Corporation 5-11 Xmath Control Design Module
Page 96

Chapter 5 Classical Feedback Analysis
Each of these contributes a phase angle φ defined by:
margin( )
with ω and p
φωp
expressed in the same units, either radians per second or Hz,
n
⁄()atan=
n
and using a four-quadrant arctangent function similar to that provided by
atan2( ) in Xmath. Thus the amount of phase contributed by a first order
pole at the frequency
=
ω p
n
(generally termed the corner frequency, because the asymptotes used to
draw different portions of the response intersect and form a corner) is –45°.
At frequencies beyond the corner frequency, the phase angle contributed by
that pole comes closer and closer to –90°. First-order zeros contribute phase
angle in the same manner except that the sign of the angle is positive.
[gnMargin,phMargin,dPdF,dGdF] = margin(H)
The margin( ) function is a useful tool for evaluating the stability margin
of a given system based on its frequency response. It returns PDMs
indicating the gain margin and the phase margin, as well as the rate of
change of gain and phase.
margin( ) is defined for SISO systems only. It takes as input either a
single PDM representing frequency response or a pair of PDMs containing
gain information in decibels and phase information in degrees. In either
case, the domain of the input is the set of frequency points, ω.
Within
margin( ), as within bode( ), the frequency response is
converted to decibel magnitude and degree phase. All angles are converted
to four-quadrant angles between 0° and 360°. Use the following notation
for each point i in the frequency range:
Δxxi1+()xi()–=
Xmath Control Design Module 5-12 ni.com
Page 97

Chapter 5 Classical Feedback Analysis
margin( ) loops over all the frequency points in the response and
performs the following computation for phase and gain margins at each,
denoting gain margin as Mg and phase margin as Mp:
Mp i() phase i()
gain i() Δgain+()
Mg i()
---------------------------------------------
–=
Δphase
Δpha se
-------------------
+=
⎛⎞
Δω gain i 1+()
–
⎝⎠
Δω
⎛⎞
Δω phase i 1+()
–
⎝⎠
Δω
---------------
Δgain
Δω
-------------------
Δphase
This loop finds all the frequency intervals within the response which
contain –180° phase crossings and 0 decibel gain crossings.
margin( )
then interpolates to find more exact frequency values for the crossings.
A gain margin value is returned for every pair of phases between which
a –180° phase value must occur, and a phase margin is returned for each
pair of gains between which a zero-decibel gain value must occur.
margin( ) also computes the frequency-rate of change for both the phase
and the gain of the response.
–180° and 0 dB crossings are difficult to detect accurately if the points in
the frequency response are too widely spaced.
You can examine the gain and phase margins of your open-loop system
quickly using
response plots first. Input to margin is the frequency response
margin( ), without having to draw the bode gain and phase
H of the
system. Referring to the system defined in Example 5-3, you can see that
you already have
explicitly using
H as the output from bode( ), but you can calculate it
freq( ) as shown in Example 5-4.
Example 5-4 Obtaining Gain and Phase Margin Using margin( )
H = freq(sys,{Fmin=0.01,Fmax=10,npts=300});
[Gm,Pm] = margin(H)
Gm (a pdm) =
- domain |
----------+----------
0.595514 | 44.5062
Pm (a pdm) =
domain |
----------+----------
0.0257558 | 12.3814
© National Instruments Corporation 5-13 Xmath Control Design Module
Page 98

Chapter 5 Classical Feedback Analysis
Note margin( ) also returns the frequencies at which the phase crosses the –180° line
and the gain crosses the 0 dB line. These results match the gain and phase margins shown
graphically in Figure 5-4.
nichols( )
[H,dB,Phase] = nichols(Sys,{F,keywords})
The nichols( ) function is another useful frequency domain tool for
examining system performance in dynamic systems. The open-loop
frequency response is calculated and plotted against the gain in the standard
Nichols format (gain in decibels versus phase in degrees). Different points
on the plot thus correspond to different values of ω.
nichols( ) plots are particularly useful as a means of obtaining the
closed-loop frequency response of a system from the open-loop response.
Nichols plots are frequently augmented with curves, or loci, of constant
magnitude or phase. These curves are drawn when the
is specified. Notice that each point on the open-loop response curve
corresponds to the response of the system at a given frequency, and the
closed-loop magnitude response at that frequency can be read off the
Nichols plot by noting the value of the magnitude locus which the point on
the curve intersects. The closed-loop phase can be determined in a similar
manner by noting the phase locus which the open-loop curve crosses.
[Oga70]
pattern keyword
nichols( ) is implemented in a manner very similar to that used for
bode( ). It generates a frequency range if none is explicitly entered,
calls
freq( ) internally, and converts the complex frequency response
to magnitude gain in decibels and phase in degrees.
nichols( ) differ only in the plots they produce. For MIMO systems,
nichols( ) will produce plots with as many curves as there are system
bode( ) and
inputs. A menu presents a selection of output responses. To generate a
Nichols plot, use the syntax shown in Example 5-5.
Example 5-5 nichols( ) Plot
A = [2, 0, -0.01; 2,-2,0; -1.4, 3, 0];
B = [3; 5; -1];
C = [1, 0, 4];
nsys = system(A,B,C,1);
H=nichols(nsys,
{Fmin=.01,Fmax=5,npts=300, pattern,!wrap})
Xmath Control Design Module 5-14 ni.com
Page 99

The result is shown in Figure 5-5.
Figure 5-5. nichols( ) Gain-Phase Plot
Chapter 5 Classical Feedback Analysis
Nyquist Stability Analysis
Nyquist analysis is a frequency domain method for examining system
performance of dynamic systems. Nyquist plots typically consist of the real
part of the frequency response plotted against the imaginary part of the
response. Nyquist plots are particularly useful in that they indicate the
stability of a closed-loop system, given an open-loop system which
includes a gain, K (it may be unity).
Nyquist’s stability criterion derives from Cauchy’s principle, which states
that a contour integral of a complex function will evaluate to zero as long
as the contour does not contain a singularity of that function [ChB84]. The
frequency response is the complex function in this case, and the contour
over which it is evaluated and plotted is determined by the frequency range
of the response.
Nyquist’s stability criterion states that the number of clockwise
encirclements of the –1 point on the real axis by the plot is equal to the
number of unstable closed-loop poles minus the number of unstable
open-loop poles. This criterion can be used to determine how many
encirclements are required for closed-loop stability. For example, if the
© National Instruments Corporation 5-15 Xmath Control Design Module
Page 100

Chapter 5 Classical Feedback Analysis
plant is open-loop stable, then there should be no encirclements.
If the plant has one open-loop unstable pole, there should be one negative
(counter-clockwise) encirclement.
The stability criterion is most easily derived from the SISO
transfer-function representation of a system. The Nyquist plot for a MIMO
system consists of a set of plots, one for each output, each containing as
many input frequency response curves as there are system inputs. You can
derive any plot from a context menu. If you close a feedback loop around a
SISO system in transfer function format, you obtain a closed-loop system
as shown in Figure 5-6.
You obtain the following closed-loop transfer function from Y(s) to U(s):
U(s) Y(s)
+
–
Figure 5-6. Closed-Loop System Containing a Variable Gain K
K
H(s) =
num(s)
den(s)
nyquist( )
Ys()
-----------
Us()
KH s()
-------------------------=
1 KH s()+
Thus, the closed-loop roots are the roots of the equation 1 + KH(s) = 0.
The complex frequency response of KH(s), evaluated for s = jω in
continuous time and e
jωT
for discrete systems, will encircle (–1,0) in the
complex plane if 1 + KH(s) encircles (0,0). If you are examining the
Nyquist plot of H(s), you will notice that an encirclement of (–1/K,0) by
H(s) is the same as an encirclement of (–1,0) by KH(s). This fact allows you
to use one Nyquist plot to determine the stability of a system for any and
all values of K.
H = nyquist(Sys,{F,keywords})
The nyquist( ) function is structured very similarly to bode( ) and
nichols( ) in that it is largely a wrapper on the freq( ) function to
obtain the system’s frequency response. The output
the call to
that
freq( ). The main difference from the other two functions is
nyquist( ) does not calculate the decibel gain and the phase of the
H is just the output from
system’s response. It generates the Nyquist plot by plotting the real part of
each point of the response against the imaginary part.
Xmath Control Design Module 5-16 ni.com
 Loading...
Loading...