

Page 1

Ergänzende Informationen zum Decoder ,
Page 2
Hinweise:
In dieser Anleitung werden ergänzende Infomationen zu den mLD/3
und mSD/3 gegeben. Grundlage ist jedoch immer die dem Decoder
beiliegende Bedienunganleitung.
Die vorliegenden Informationen sind nicht für ungeübte Anwender.
Grundsätzlich empfehlen wir, alle Änderungen an den Decoder-Einstel-
lungen für mögliche Fehlersuchen zu dokumentieren.
Rangiergang
In CV 145 kann eingestellt werden, wie stark die Geschwindigkeiten
durch den Rangiergang reduziert werden sollen.
Bit 7 ein reduziert auf 1/2 (auf die halbe Fahrstufe)
Bit 6 ein reduziert auf 1/4
Bit 5 an reduziert auf 1/8
Bit 4 an reduziert auf 1/16
Bit 3 an reduziert auf 1/32
Bit 2 an reduziert auf 1/64
Bit 1 an reduziert auf 1/128
Datenbereiche und Reset
Der Decoder verfügt über zwei Datenbereiche. Im „Arbeitsbereich“ sind
die Daten hinterlegt, mit denen der Decoder arbeitet. Zusätzlich gibt
es einen Bereich, in dem die Einstellungen des Decocers „gesichert“
werden können. Wie beim Reset üblich, können Sie durch Eingabe von
bestimmten Werten in der CV 8 entsprechende Aktionen auslösen:
Wert Aktion
2 Arbeitsbereich sichern
4 Arbeitsbereich aus Sicherung widerherstellen
8 Reset auf Werkseinstllungen (Sicherung wird gelöscht!)
1 Reset (Sicherung bleibt erhalten)
CV 31 / 32
Der Bereich der CV 257 bis CV 512 sind ab Werk mehrfach belegt. Dem
entsprechend muss vor den Arbeiten in oder an diesen CVs angegeben
werden, in welcher dieser Belegungen gearbeitet werden soll. Dies
wird in den CVs 31 und 32 eingegeben. Zunächst wird in CV 31 eingestellt, welchen Themenbereich, und in CV 32 welche Seite bearbeitet
werden soll. Derzeit sind 3 Themen angelegt.
CV 31 Wert Thema
16 Sound
17 Timer
255 Info
2
Page 3

Modus
In den Einstellungen zu den Funktionen kann für jede Funktion ein Modus festgelegt werden (z.B. CV 112, CV 116, ..., siehe CV-Tabelle).
Wert Bedeutung
0 Ausgang aus
1 Dimmer
2 Blinklicht 1
3 Blinklicht 2
4 Blinklicht einzeln
5 Blinklicht doppelt
6 Zufallsgenerato
7 Rauchgenerator
8 Licht auf-/abblenden
9 Mars Licht
10 Gyra Licht
11 Licht nach „Regel 17“ vorwärts
12 Licht nach „Regel 17“ rückwärts
13 Neornöhre
14 Energiesparlampe
15 Telex
16 Schalten
17 min. Schalten
Funktionsmapping
Das Funktonsmapping ist sehr weitreichend und komplex. Jedes
einzelne Mapping wird über drei Einstellungen vorgenommen. Dabei
wird festgelegt:
- Wie wird die Funktion ausgelöst
- mögliche Bedingungen gelten für diese Funktion
- Welche Funktion wird ausgelöst
Diese Informationen werden, nachdem sie eingestellt wurden, gemein-
sam in einer „Zeile“ gespeichert. Insgesammt können 80 Zeilen (0 – 79)
gespeichert werden.
Das Vorgehen
1. In CV 33 wird eingetragen, welche der 80 möglichen Zeilen eingelesen werden soll. Wird ein neues Mapping angelegt, kann diese CV
leer bleiben.
2. In CV 34 wird der „Auslöser“ angegeben (siehe Tabelle „Auslöser &
Ereignisse“).
3. In CV 35 können Bedingungen angegeben werden (siehe Tabelle
„Bedingungen“). Diese CV kann auch leer bleiben.
4. In CV 36 wird angegeben, welche Funktion ausgelöst werden soll
(siehe Tabelle „Auslöser & Ereignisse“).
5. In CV 37 wird angegeben, in welche Zeile das aktuell angelegte
Mapping eingetragen werden soll. Wird hier eine schon belegte
Zeile angegeben, so wird diese durch die neuen Einstellungen
überschrieben. Ein neu angelegtes Mapping ist erst gültig, wenn es
in eine Zeile geschrieben wurde.
3
Page 4
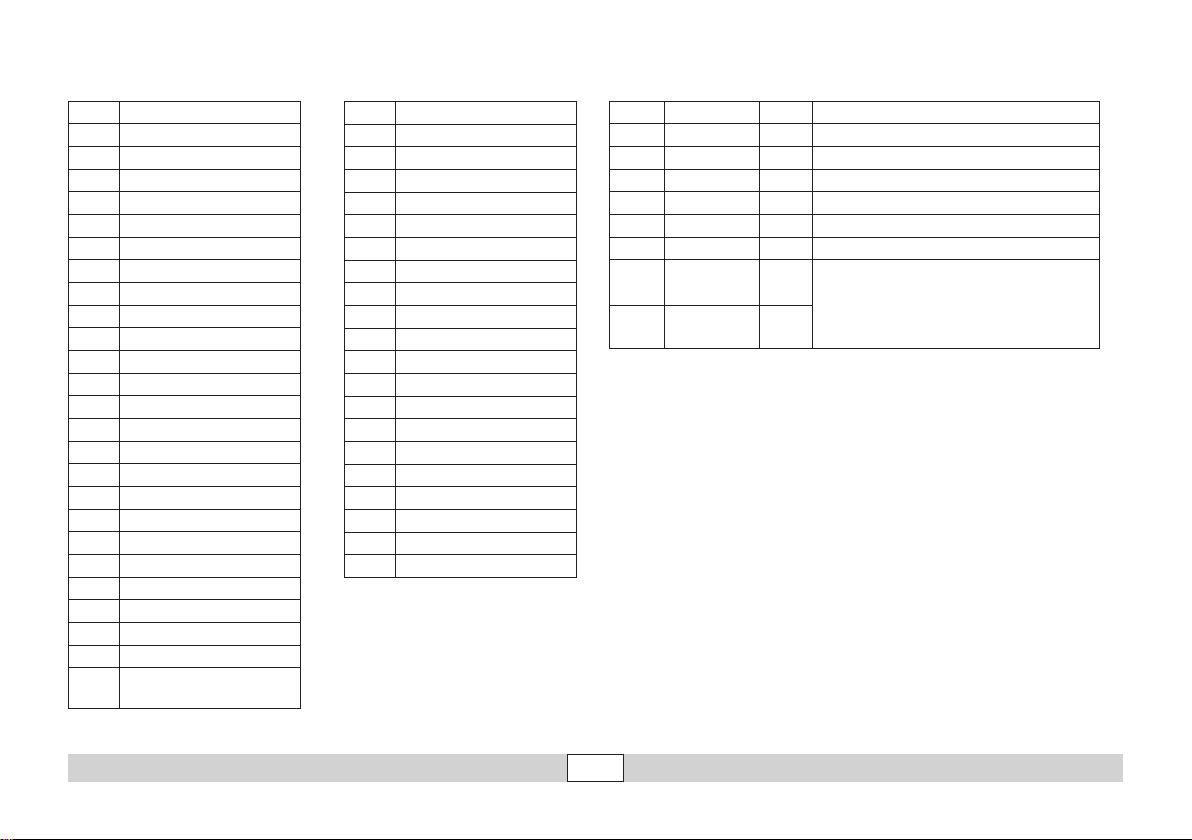
Auslöser & Ereignisse
Wert Auslöser / Ereignis
0 F0
1 F1
2 F2
3 F3
... ...
15 F15
64 immer
66 Fahrtwechsel
67 Richtungswechsel
68 Sensor 1
69 Sensor 2
79 Random
80 Licht vorne
81 Licht hinten
82 AUX 1
83 AUX 2
84 AUX 3
85 AUX 4
86 AUX 5
87 AUX 6
112 ABV au
113 Rangiergang
114 Bremsenquietschen aus
117 Sound Mute
Bremsenquietschen
118
Spielewelt
Wert Auslöser / Ereignis
160 Und 1
161 Und 2
162 Und 3
163 Und 4
164 Und 5
165 Und 6
166 Und 7
167 Und 8
168 Timer 1
169 Timer 2
170 Timer 3
171 Timer 4
176 Fahrsound
177 Sound 1
178 Sound 2
179 Sound 3
180 Sound 4
181 Sound 5
... ...
204 Sound 28
Bedingungen
Bit Bedeutung Wert Bemerkung
Bit 0 — 0 / 1
Bit 1 — 0 / 2
Bit 2 Stand 0 / 4 an = nur im Stand
Bit 3 Fahrt 0 / 8 an = nur bei Fahrt
Bit 4 Vorwärts 0 / 16 an = nur bei Fahrtrichtung vorwärts
Bit 5 Rückwärts 0 / 32 an = nur bei Fahrtrichtung rückwärts
Bit 6 Pegel 0 / 64
Bit 7 Flanke 0 / 128
0 = mit Pegel
64 = ohne Pegel
128 = steigende Flanke
192 = fallende Flanke
4
Page 5
Übersicht über die eingebauten Motorregler
und deren Parameter
Der Classic Regler
Klassischer Regler, einfach einzustellen, aber weniger geeignet für
Glockenakermotoren; Lastregelung ohne Regeleinfluss.
Motor-Typ: Wählt Regel-Grundeinstellungen abhängig vom Motor.
Regelreferenz: Für die Regelreferenz gibt es keine festen Regeln. Sie
muss nach „Gefühl“ eingestellt werden.
PWM-Start: Beeinflusst das Anfahrverhalten der Lok.
EMK-Maximum: Gibt die maximale Regelung bei höchster Fahrstufe an.
Der Auto-PI Regler
neuer Universalregler. Ist eine Kombination aus einem 2-Punkt-Regler
(Anfahren) und einem PI-Regler (Fahrbetrieb).
Motor-Typ: Wählt Regel-Grundeinstellungen abhängig vom Motor.
Regelreferenz: Für die Regelreferenz gibt es keine festen Regeln. Sie
muss nach „Gefühl“ eingestellt werden.
PWM-Start: Beeinflusst das Anfahrverhalten der Lok.
Langsam Grenze: Bestimmt den Übergang vom 2-Punkt- zum PI-Regler
(auf die internen 4096 Fahrstufen bezogen).
Regler K: Höhe des Proportionalanteils. Bestimmt den Verstärkungsfak-
tor des Fehlerverstärkers
Regler Il: Höhe des Integralanteils. Bestimmt die Stärke der Filterung
des Reglers
Regeleifluss: Gibt an, wie genau geregelt werden soll
(z.B. für Lastsimulation an Steigungen ...)
EMK-Maximum: Gibt die maximale Regelung bei höchster Fahrstufe an.
PWM-Offset: Beeinflusst den Übergang zwischen den beiden Reglern.
Der PID Regler
Aus der Automatisierungstechnik bekannter Regler, der hier auf die
Belange der Modellbahn angepasst und ergänzt wurde. Er ist besonders aufwändig und bietet unzählige Möglichkeiten, ist aber ebenso
aufwändig einzustellen.
Motor-Typ: Wählt Regel-Grundeinstellungen abhängig vom Motor.
Regelreferenz: Für die Regelreferenz gibt es keine festen Regeln. Sie
muss nach „Gefühl“ eingestellt werden.
PWM-Start: Beeinflusst das Anfahrverhalten der Lok.
Regler K: Höhe des Proportionalanteils. Bestimmt den Verstärkungsfak-
tor des Fehlerverstärkers.
Regler I: Höhe des Integralanteils. Bestimmt die Stärke der Filterung
des Reglers. Höhere Werte verlangsamen die Regelung.
Regler D: Bestimmt den Einfluss des Differntial-Anteils auf die Rege-
lung. Höhere Werte machen die Regelung rauher.
Langsam-Grenze: Gibt die obere Grenz-Fahrstufe für die „langsam“-
Einstellungen an
(auf die internen 4096 Fahrstufen bezogen).
Langsam-K: Korrekturfaktor für den K-Anteil bei niedrigen Geschwin-
digkeiten
Langsam-I: Korrekturfaktor für den I-Anteil bei niedrigen Geschwindig-
keiten
Langsam-D: Korrekturfaktor für den D-Anteil bei niedrigen Geschwin-
digkeiten
Regeleifluss: Gibt an, wie genau geregelt werden soll (z.B. für Lastsi-
mulationen an Steigungen ...)
EMK-Maximum: Gibt die maximale Regelung bei höchster Fahrstufe an.
Der Analogregler
ergänzt das Spektrum um ausschließlich für den Analogbetrieb ideale
Einstellungen vornehmen zu können.
Der Analogregler übernimmt die Parameter-Einstellungen vom
Auto-PI Regler.
5
Page 6

CV Bedeutung Wert für 6021 Wert DCC
01 Adresse (CV 29/Bit 5 = 0) 01 – 80 (52) 1 – 127
02 PoM Minimalgeschwindigkeit — 0 – 255
03 PoM Anfahrverzögerung 01 – 63 0 – 255
04 PoM Bremsverzögerung 01 – 63 0 – 255
05 PoM Maximalgeschwindigkeit 01 – 63 0 – 255
07 Einmessfahrt / Versionsnummer 77 77
08 Werkreset/Herstellerkennung 08 08
13 PoM Funktionen F1 - F8 im Analogbetrieb (keine Sounds) — 0 – 255
14 PoM Funktionen F9 - F15 und Licht im Analogbetrieb (keine Sounds) — 0 – 255
17 Erweiterte Adresse (oberer Teil, CV 29 Bit 5 = 1) — 192 – 255
18 Erweiterte Adresse (unterer Teil, CV 29 Bit 5 = 1) — 0 – 255
19 Traktionsadresse — 0 – 255
21 PoM Funktionen F1 - F8 bei Traktion — 0 – 255
22 PoM Funktionen F9 - F15 und Licht bei Traktion — 0 – 255
27 PoM
29
31 PoM Themen (Auswahl für die CV 257 bis 512) — 16 – 255
32 PoM Seite (Auswahl für die CV 257 bis 512) 0 – 255
33 PoM Mapping: Zeile lesen 0 – 79 0 – 79
34 PoM Mapping: Auslöser — 0 – 255
35 PoM Mapping: Bedingung — 0 – 255
36 PoM Mapping: Funktion — 0 – 255
Bit 4 = normales Bremsverhalten
Bit 5 = inverses Bremsverhalten
Bit 0: Umpolung Fahrtrichtung
Bit 1: Anzahl Fahrstufen 14 oder 28/128
Bit 2: DCC Betrieb mit Bremsstrecke
Bit 5: Adressumfang 7 Bit / 14 Bit
— 0, 16, 32, 48
0 / 1
—
0 / 2
0 / 4
0 / 32
6
Page 7

CV Bedeutung Wert für 6021 Wert DCC
37 PoM Mapping: Zeile schreiben 0 – 79 0 – 79
47 PoM Motorregelung analog, 1 = an, 0 = aus 0, 1 0, 1
Motorregelung: Regler-Auswahl
48 PoM
50 PoM
51 PoM
52 PoM
53 PoM Motorregelung - Regelreferenz — 0 – 255 (40)
54 PoM Motorregelung - Regler K — 0 – 255 (80)
55 PoM Motorregelung - Regler I — 0 – 255 (60)
0 = Classic
1 = Auto-PI
2 = PID-Regler
alternative Formate
Bit 0: analog AC
Bit 1: analog DC
Bit 2: MM
Bit 3: mfx
Bit 4: mfx+
Anschlüsse vertauschen
Bit 0: Motoranschluss
Bit 1: Lichtanschluss
Bit 2: Gleisanschluss
Bit 3: AUX 3, 0 = verstärkt, 8 = Logik
Bit 4: AUX 4, 0 = verstärkt, 8 = Logik
Einstellung zum Motorausgang
0 = Funktionsausgänge AUX 5 & 6
1 = Softdrive Sinus
2 = ungegegelet
3 = Hochleistungsantrieb C90
4 = Glockenankermotor
5 = Gleichstrom weich
6 = Gleichstrom hart
7 = Gleichstrom Spur1
0 – 2 0 – 2
— 0 – 31
0 – 31 0 – 31
1, 2, 3, 4, 5, 6, 7 1, 2, 3, 4, 5, 6, 7
7
Page 8

CV Bedeutung Wert für 6021 Wert DCC
56 PoM Motorregelung - Regeleinfluss 0 – 255
57 PoM
58 PoM
60 PoM
61 PoM Zufallssound Intervall Min. 0 – 255
62 PoM Zufallssound Intervall Max. 0 – 255
63 PoM Lautstärke gesamt 01 – 63 0 – 255
64 PoM Schwelle für Bremsenquietschen 0 – 255
66 PoM
67 – 94 PoM Geschwindigkeitstabelle / Kennlinie 0 – 255
95 PoM
112 PoM Licht vorne Modus 0 – 17 0 – 17
113 PoM Licht vorne Dimmer, 0 = aus — 0 – 255
114 PoM Licht vorne Periode, z.B. Blinkfrequenz — 0 – 255
115 PoM Licht vorne Verzögerung, Ein- Ausschaltverzögerung — 0 – 255
116 PoM Licht hinten Modus 0 – 17 0 – 17
117 PoM Licht hinten Dimmer — 0 – 255
118 PoM Licht hinten Periode — 0 – 255
119 PoM Licht hinten Verzögerung — 0 – 255
Soundabstand der Dampfstöße bei Fahrstufe 1
(0 = mit Radsensor)
Soundabstand der Dampfstöße bei Fahrstufe > 1
(0 = mit Radsensor)
Multibahnhofsansage
Bit 0 – 3 = Anzahl der Bahnhöfe
Bit 4 = letzter Bahnhof kehrt Reihenfolge um
Bit 5 = Lokrichtung bestimmt Reihenfolge
Bit 6 = Reihenfolge Grundeinstellung
Trimm vorwärts
(Wert / 128 = Faktor mit dem die Fahrstufe multipliziert wird)
Trimm rückwärts
(Wert / 128 = Faktor mit dem die Fahrstufe multipliziert wird)
— 0 – 127
0 – 255
0 – 255
0 – 255
0 – 255
8
Page 9

CV Bedeutung Wert für 6021 Wert DCC
120 PoM AUX 1 Modus 0 – 17 0 – 17
121 PoM AUX 1 Dimmer — 0 – 255
122 PoM AUX 1 Periode — 0 – 255
123 PoM AUX 1 Verzögerung — 0 – 255
124 PoM AUX 2 Modus 0 – 17 0 – 17
125 PoM AUX 2 Dimmer — 0 – 255
126 PoM AUX 2 Periode — 0 – 255
127 PoM AUX 2 Verzögerung — 0 – 255
128 PoM AUX 3 Modus 0 – 17 0 – 17
129 PoM AUX 3 Dimmer — 0 – 255
130 PoM AUX 3 Periode — 0 – 255
131 PoM AUX 3 Verzögerung — 0 – 255
132 PoM AUX 4 Modus 0 – 17 0 – 17
133 PoM AUX 4 Dimmer — 0 – 255
134 PoM AUX 4 Periode — 0 – 255
135 PoM AUX 4 Verzögerung — 0 – 255
136 PoM AUX 5 Modus 0 – 17 0 – 17
137 PoM AUX 5 Dimmer — 0 – 255
138 PoM AUX 5 Periode — 0 – 255
139 PoM AUX 5 Verzögerung — 0 – 255
140 PoM AUX 6 Modus 0 – 17 0 – 17
141 PoM AUX 6 Dimmer — 0 – 255
142 PoM AUX 6 Periode — 0 – 255
143 PoM AUX 6 Verzögerung — 0 – 255
145 PoM Faktor Rangiergang — 0 – 128
9
Page 10

CV Bedeutung Wert für 6021 Wert DCC
146 PoM Lautstärke Bremsenquietschen — 0 – 255
165 PoM Motorregelung, Regler D — 0 – 255
166 PoM
167 PoM Motorregelung, langsam K, 0 = kein Proportionalanteil — 0 – 255
168 PoM Motorregelung, langsam I, 0 = kein Integralanteil — 0 – 255
169 PoM Motorregelung, langsam D, 0 = kein Differentialanteil — 0 – 255
170 PoM
171 PoM Motorregelung, EMK-Maximum —
172 PoM Motorregelung, PWM-Offset, 0 = keine Korrektur — 0 – 255
173 PoM
174 PoM Zustandsspeicher Fahrtrichtung — 0 – 1
176 PoM Analog DC Minimalgeschwindigkeit — 0 – 255
177 PoM Analog DC Maximalgeschwindigkeit — 0 – 255
178 PoM Analog AC Minimalgeschwindigkeit — 0 – 255
179 PoM Analog AC Maximalgeschwindigkeit — 0 – 255
Motorregelung, Langsam Grenze,
0 = kein „langsam-Bereich, 1 – 255 = Obergrenze „langsam“
Motorregelung, PWM-Start,
0 = max., 255 = min.
Zustandsspeicher
Bit 0 = Funktinszustände
Bit 1 = Geschwindigkeiten
Bit 2 = nach Reset mit/ohne ABV anfahren
— 0 – 255
— 0 – 255
0 – 4096
( 0 – 255 * 16)
— 0 – 7
10
Page 11

Index-Bereich CV 257 – 512, Thema Sound (CV 31 = 16, CV 32 = 0)
CV Bedeutung Wert für 6021 Wert DCC
300 PoM Lautstärke Fahrgeräusch — 0 – 255
301 PoM Lautstärke Sound 1 — 0 – 255
302 PoM Lautstärke Sound 2 — 0 – 255
303 PoM Lautstärke Sound 3 — 0 – 255
304 PoM Lautstärke Sound 4 — 0 – 255
305 PoM Lautstärke Sound 5 — 0 – 255
306 PoM Lautstärke Sound 6 — 0 – 255
307 PoM Lautstärke Sound 7 — 0 – 255
308 PoM Lautstärke Sound 8 — 0 – 255
309 PoM Lautstärke Sound 9 — 0 – 255
310 PoM Lautstärke Sound 10 — 0 – 255
311 PoM Lautstärke Sound 11 — 0 – 255
312 PoM Lautstärke Sound 12 — 0 – 255
313 PoM Lautstärke Sound 13 — 0 – 255
314 PoM Lautstärke Sound 14 — 0 – 255
315 PoM Lautstärke Sound 15 — 0 – 255
316 PoM Lautstärke Sound 16 — 0 – 255
317 PoM Lautstärke Sound 17 — 0 – 255
318 PoM Lautstärke Sound 18 — 0 – 255
319 PoM Lautstärke Sound 19 — 0 – 255
... ...
328 PoM Lautstärke Sound 28 — 0 – 255
11
Page 12

Index-Bereich CV 257 – 512, Thema Mapping (CV 31 = 17, CV 32 = 0)
CV Bedeutung Wert für 6021 Wert DCC
260 PoM Funktionszuweisung Zeile 0, Funktionsauslöser — 0 – 31
261 PoM Funktionszuweisung Zeile 0, Bedingungen — 0 – 63
262 PoM Funktionszuweisung Zeile 0, Funktionsereignis — 80 – 87
263 PoM Funktionszuweisung Zeile 1, Funktionsauslöser — 0 – 31
264 PoM Funktionszuweisung Zeile 1, Bedingungen — 0 – 63
265 PoM Funktionszuweisung Zeile 1, Funktionsereignis — 80 – 87
266 PoM Funktionszuweisung Zeile 2, Funktionsauslöser — 0 – 31
267 PoM Funktionszuweisung Zeile 2, Bedingungen — 0 – 63
268 PoM Funktionszuweisung Zeile 2, Funktionsereignis — 80 – 87
269 – 271 PoM Funktionszuweisung Zeile 3, ...
272 – 274 PoM Funktionszuweisung Zeile 4, ...
275 – 277 PoM Funktionszuweisung Zeile 5, ...
278 – 280 PoM Funktionszuweisung Zeile 6, ...
281 – 283 PoM Funktionszuweisung Zeile 7, ...
284 – 286 PoM Funktionszuweisung Zeile 8, ...
287 – 289 PoM Funktionszuweisung Zeile 9, ...
290 – 292 PoM Funktionszuweisung Zeile 10, ...
293 – 295 PoM Funktionszuweisung Zeile 11, ...
296 – 298 PoM Funktionszuweisung Zeile 12, ...
299 – 301 PoM Funktionszuweisung Zeile 13, ...
... ...
497 – 499 PoM Funktionszuweisung Zeile 79, ...
12
Page 13

Index-Bereich CV 257 – 512, Thema Mapping, Timer (CV 31 = 17, CV 32 = 1)
CV Bedeutung Wert für 6021 Wert DCC
261 Timer 1 — 0 – 255
262 Timer 2 — 0 – 255
263 Timer 3 — 0 – 255
264 Timer 4 — 0 – 255
271 Random Takt — 0 – 255
272 Random Mittelwert — 0 – 255
273 Random Abweichung — 0 – 255
Index-Bereich CV 257 – 512, Thema Info (CV 31 = 255, CV 32 = 255)
CV Bedeutung
260 Hersteller
261 Typ, 1. Byte
262 Typ, 2. Byte
263 Typ, 3. Byte
264 Typ, 4. Byte
270 Firmware-Typ
271 Firmware-Version, 1. Byte
272 Firmware-Version, 2. Byte
273 Firmware-Version, 3. Byte
274 Firmware-Version, 4. Byte
13
Page 14

Gebr. Märklin & Cie. GmbH
Stuttgarter Str. 55 - 57
73033 Göppingen
Germany
www.maerklin.com
Änderungen vorbehalten
© Gebr. Märklin & Cie. GmbH
0915/Sm1
 Loading...
Loading...