

MyFlyDream AAT, MFD AAT User Manual

MyFlyDream
Automatic Antenna Tracker
Manual
V2.0
www.MyFlyDream.com

Notes
Thank you for purchasing the MyFlyDream Automatic Antenna Tracker (hereinafter
referred to as MFD AAT).
Please follow this manual to get familiar with the tracker and operate it correctly.
The tracker is a precision mechanical and electronic device. Please read this
manual carefully to avoid device damage or body injury.
The tracker is designed for model entertainment only. Please use it in compliance
with applicable local laws. The reliability and accuracy of the tracking system
depend on a number of factors. A strong electromagnetic interference, bad GPS
status and other reasons may cause a bad tracking result. Please consider the risk
and take it yourself. Any loss caused by the tracker system is not our responsibility.
We reserve the right to continuously improve the product performance, so this
document is not necessarily in full compliance with the tracker you purchase. The
latest version of this document will be available at our website:
www.MyFlyDream.com
1. System Components
1. MyFlyDream Tracker
2. USB programmer (for firmware update)
3. Heat shrinkable tubes
4. MyFlyDream TeleFlyOSD
5. M3x8mm stainless steel screw and self-locking nut
6. MyFlyDream AATDriver
2. Working Principle
In FPV flight, in order to get a better quality of video signal reception, we wish to use
high-gain antenna. But the high-gain antenna is often accompanied by a narrow effective
angle. MFD AAT is designed to solve the difficulty to maintain directional antenna in the best
angle of reception and transmission during FPV flight.
To form a complete system, you need to mount the TeleFlyOSD module on the plane. The
TeleFlyOSD reads data from the GPS on the plane, encodes and modulates the plane
coordinates and height information and transmits them back via a wireless audio channel
(usually use wireless image transmission audio channel).
The tracker transmits the audio signal received to the AATDriver. The AATDriver
demodulates and decodes the signal to obtain the plane position information. After
comparing with the original coordinates, it gets the current plane azimuth, distance and
height, etc. relative to the tracker. Then the AATDriver transmits the information to the
tracker that drives the internal servo to make the directional antenna aimed at the plane
position.
3. Specifications
With a built-in high quality electrical slip ring, MFD AAT has the unrestrained,
continuous panning capability. There is also a built-in electronic compass which makes it
as a Plug-and-Play system without extra initialization.
Tracker:
Weight
905g
Size
165*107*40mm (Length*Wide*Height)
Input voltage
10~13V (12V is suggested)
Current consume(empty load)
100mA
Loading capacity
1KG
Tilt range
0~90 Degrees
Pan range
0~360 Degrees without limit
Tilt speed
100 Degrees/s
Pan speed
200 Degrees/s
Spare signal channels
1~7
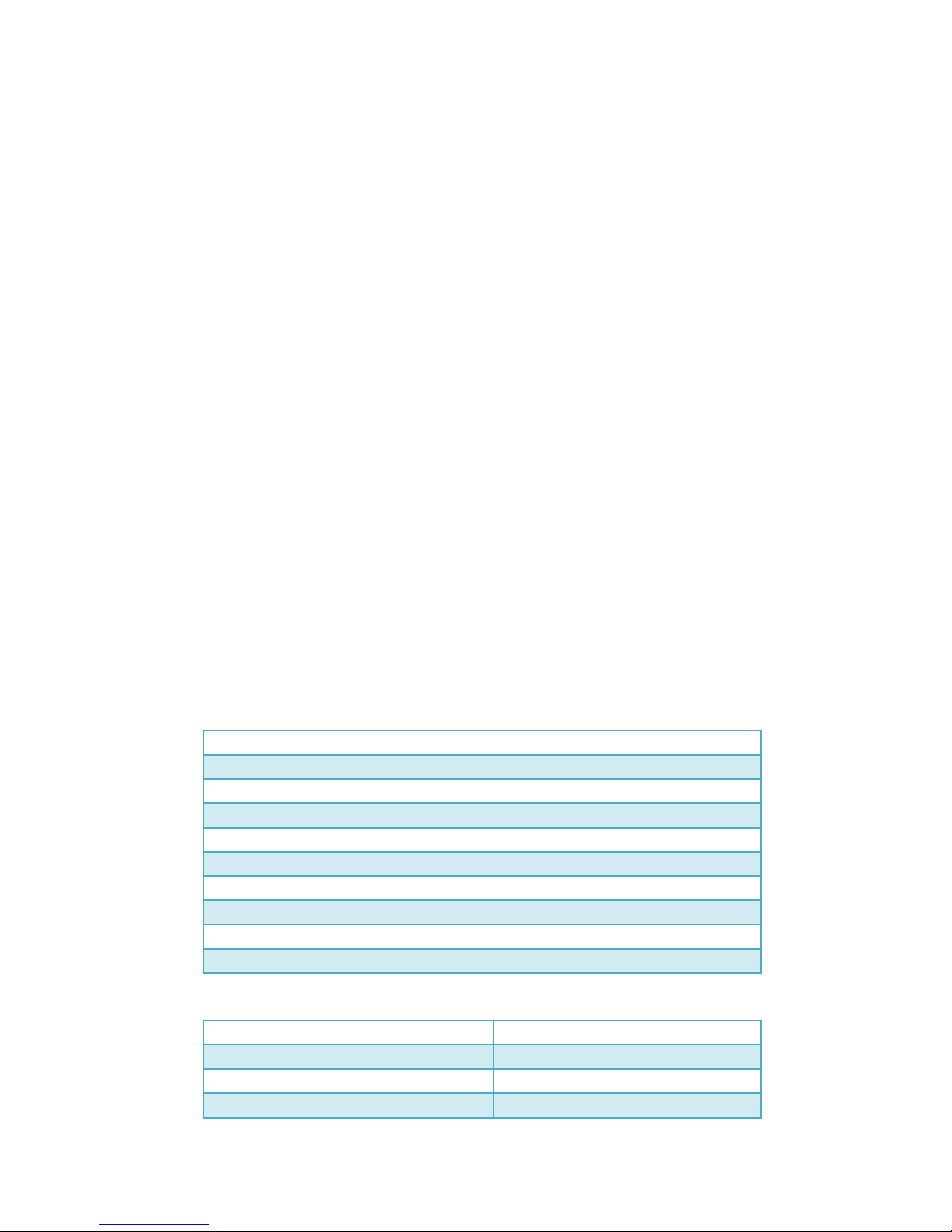
TeleFlyOSD:
Weight(Not including the harness)
8g
Size
45 * 25 mm
Input voltage
6~13V (6V is suggested)
Current consume
200mA
AATDriver:
Weight
58g
Size
78*44*23mm (Length*Wide*Height)
Input voltage
10~13V (12V is suggested)
Current consume
100mA
Virtual GPS
Communication
baud rate
1200bps
*Virtual GPS:AATDriver can virtualize itself as a bluetooth
GPS module. It outputs the location information of the
plane with $GPGGA and $GPRMC command.
4. Connection and Commissioning
1) Connecting TeleFlyOSD
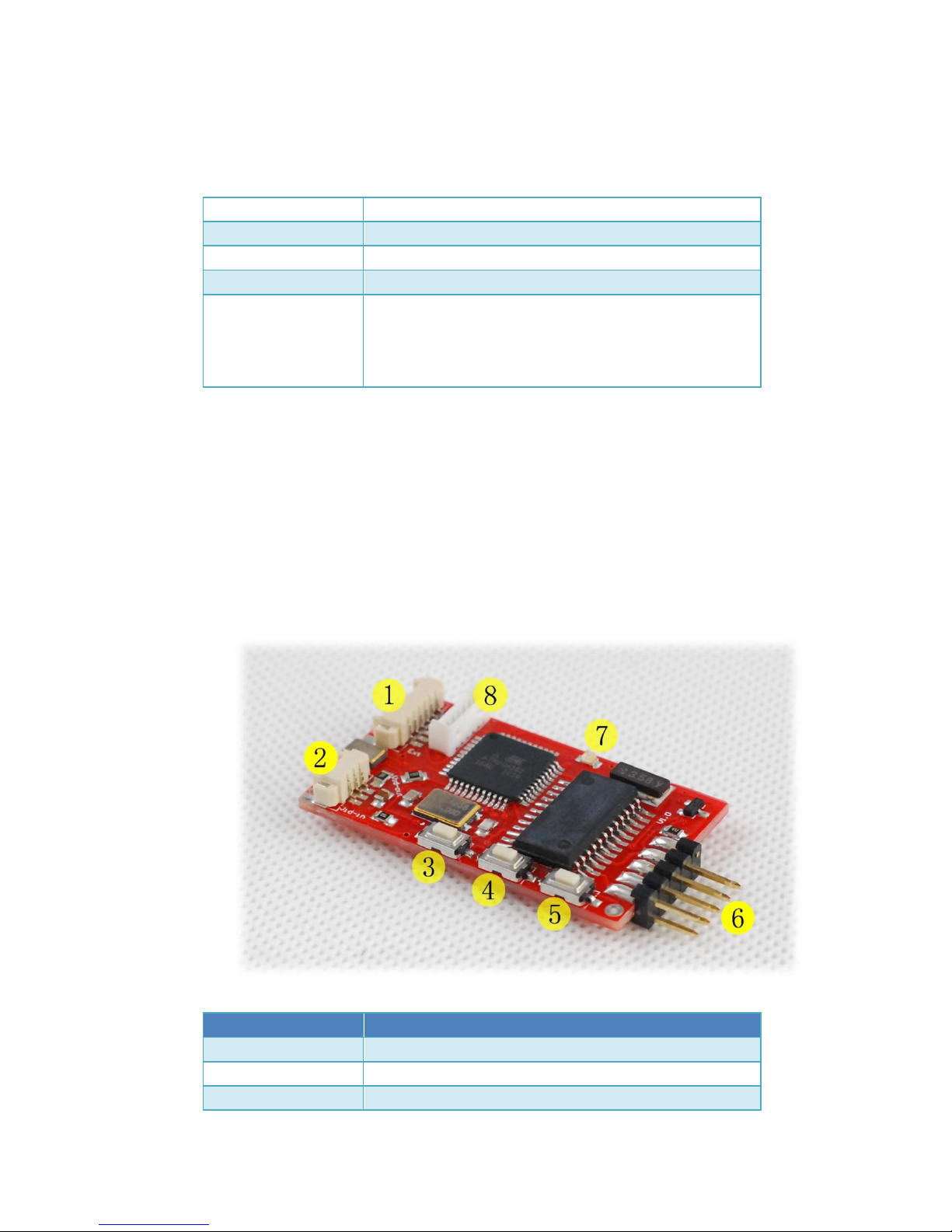
Introduction to TeleFlyOSD
部件序号
名称
1
Extension board port
2
OSD video signal port
3
UP button

4
SET button
5
DOWN button
6
Connecting pins
7
LED 8 Firmware upgrade socket
Wires color and function
颜色
名称
功能
Red
Power
Power input
Black(3 wires)
GND
Ground
Blue
SetHome
Set the tracker position
Green
GPS Data
GPS Data
Orange
GPS Power
GPS Power supply(3.3V) *
White
Audio Out
Audio output to transmitter
* Maximum current output: <80ma (13V power supply) , or < 120ma (8V power supply).
Please regard that your GPS current consumption should not exceed the limit.
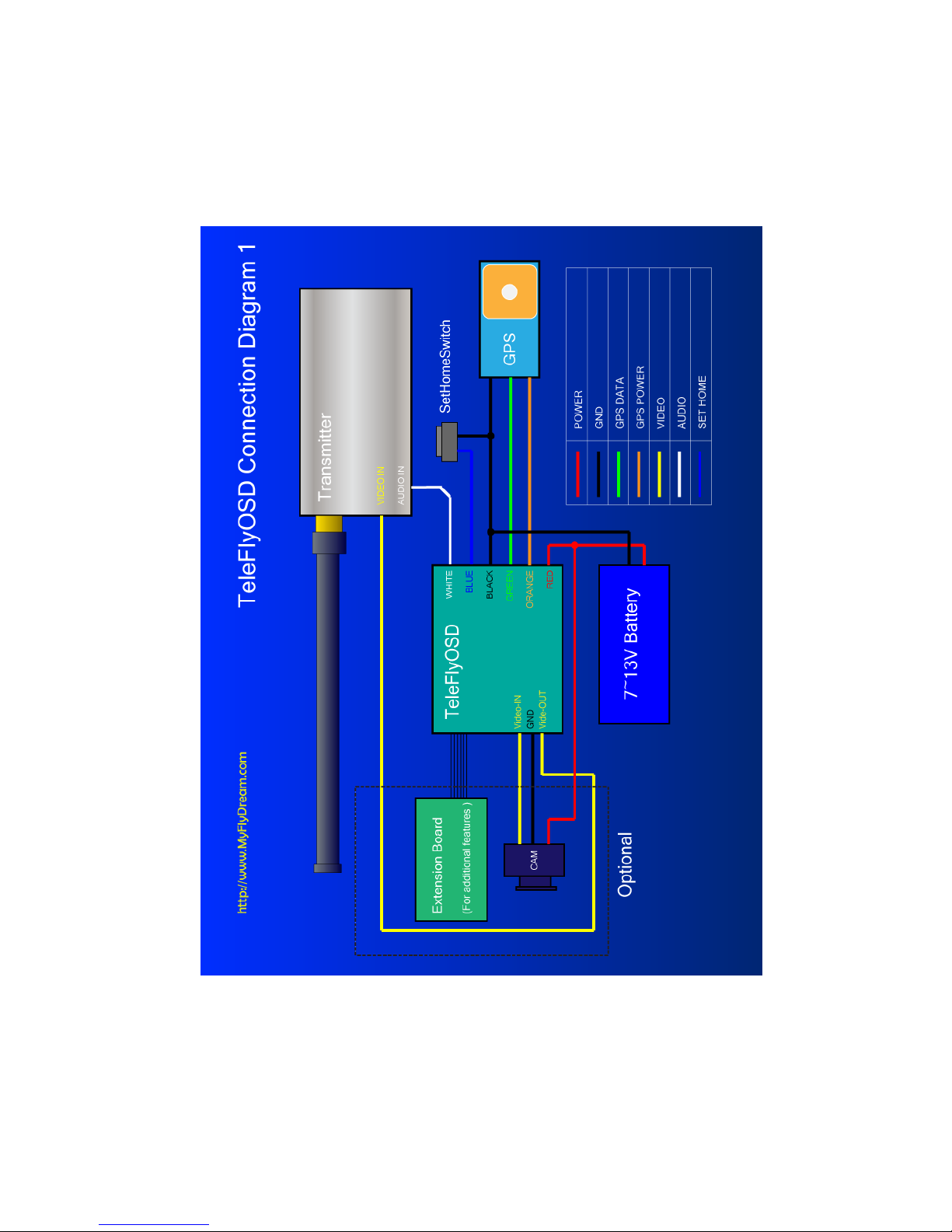
Connecting TeleFlyOSD
The TeleFlyOSD can either use a separate GPS or share a GPS with other OSD.
Please refer to Connection Diagram A if a separate GPS is used. In this configuration,
the TeleFlyOSD powers the GPS.
In the diagram, the operating voltage of GPS is assumed as 3.3V. If your GPS needs
an operating voltage of 5V, refer to Appendix A.
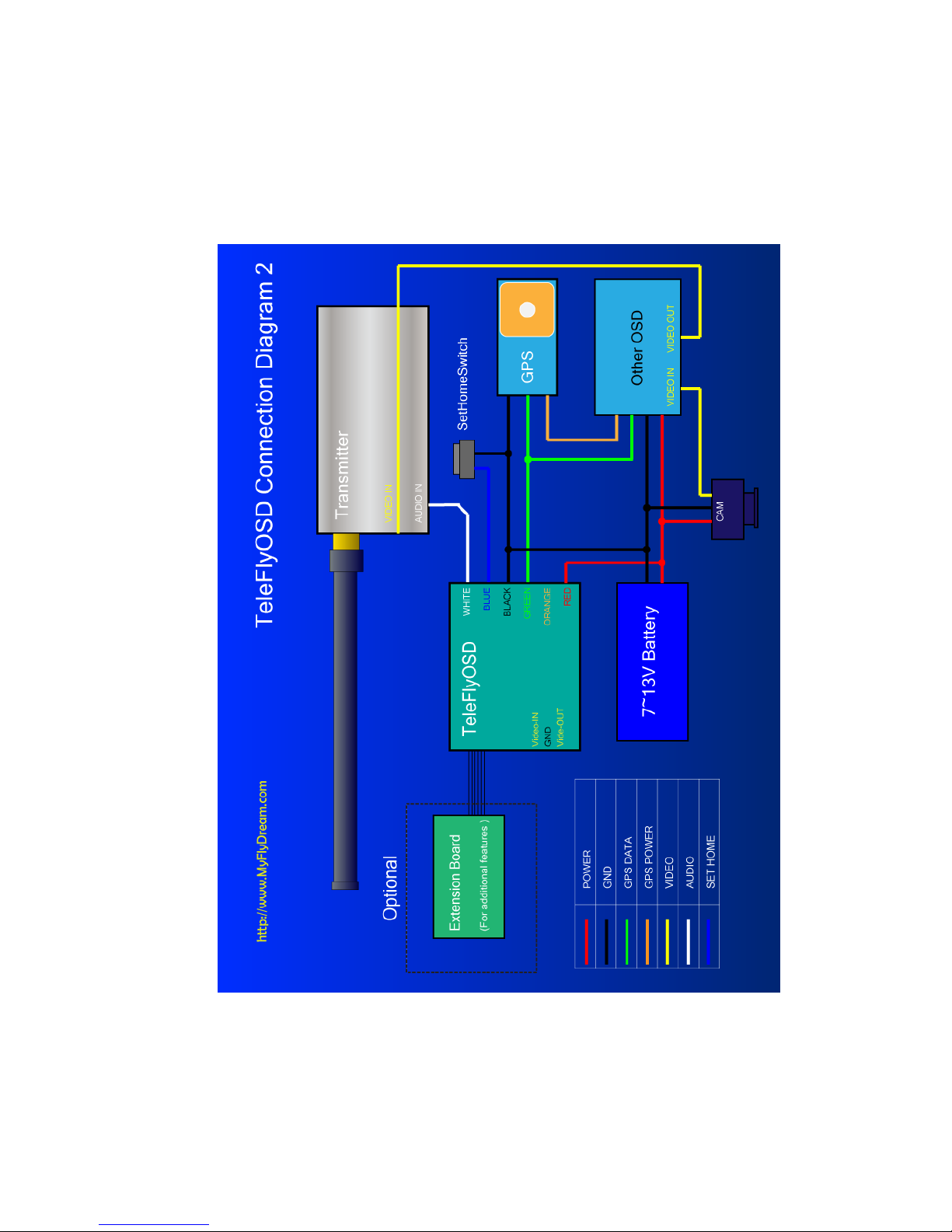
Please refer to Connection Diagram B if a GPS is shared with other OSD. In this

configuration, the GPS and other OSD connect as usual for power supply.
See Chapter 7 “OSD Functions” for specific OSD functions of TeleFlyOSD.
Connection Diagram A (power the GPS by TeleFlyOSD)
Connection Diagram B (share GPS with other OSD)
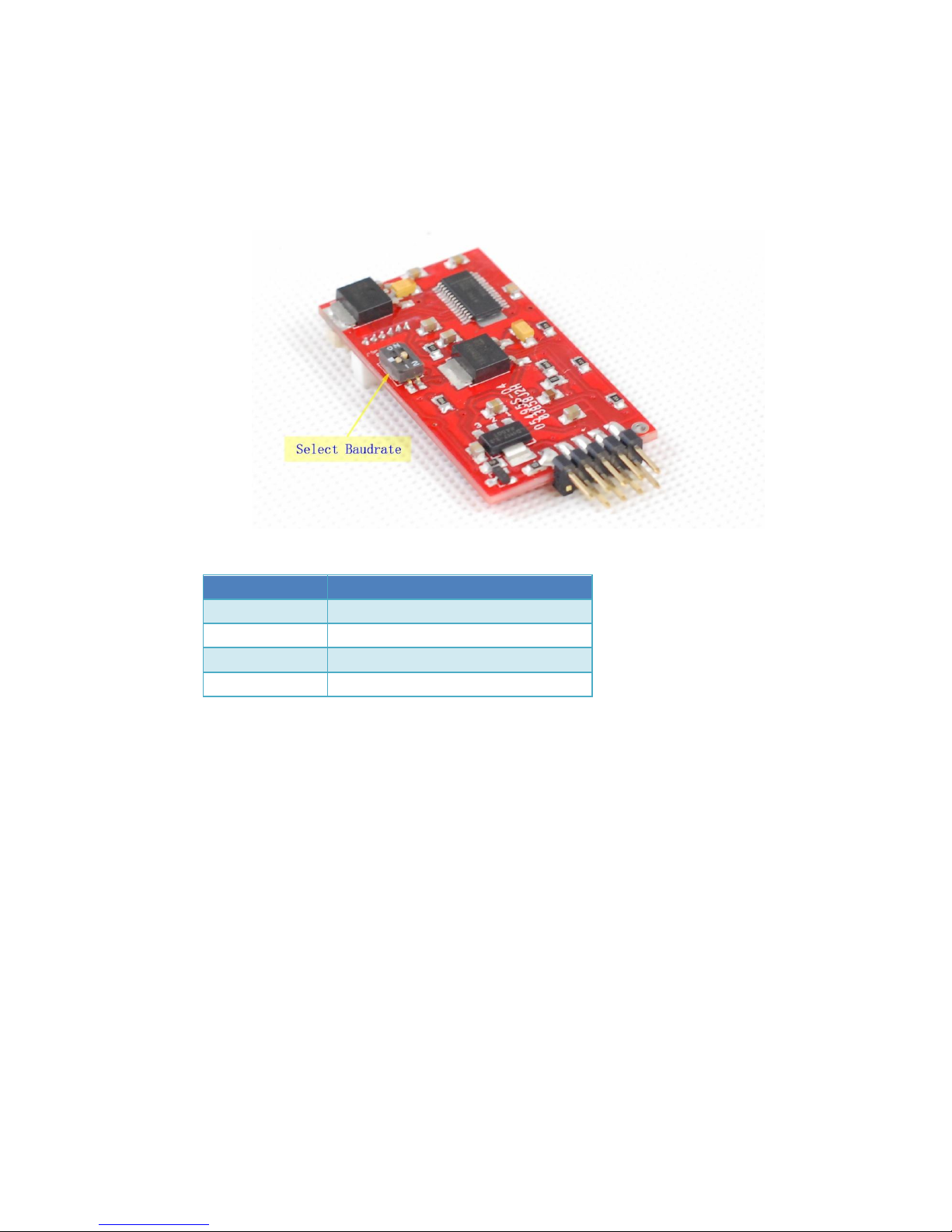
Selecting appropriate baudrate for TeleFlyOSD
Since the output data rate of different GPS may be different, it is necessary to set the
baudrate of the TeleFlyOSD communication port directed to the GPS used. There is a
two-way DIP switch on the backside of the TeleFlyOSD module used to select baudrates:
The arrow-indicated DIP switch in the figure has an ON mark above. There may be four
different baudrates combinations via setting of this switch:
DIP Status(1-2)
Communication Bardrate(bps)
OFF-OFF
115200
OFF-ON
38400 (Default)
ON-OFF
57600
ON-ON
9600
Power on after checking correct connection. The TeleFlyOSD LED will turn on. After
a few seconds, if the TeleFlyOSD communicates with the GPS normally, the LED will blink
at half the GPS data update frequency. If the LED keeps on, check whether the GPS
connection and baudrate setting are correct.
 Loading...
Loading...