

1. INTRODUCTION
The purpose of this application note is to describe the
Implementation of a generic bus 100Base-TX Fast
Ethernet node using MXIC highly integrated single chip
Fast Ethernet controller MX98728EC series. Most description in this application note applied to both
MX98728EC and MX98728AEC unless specifically described for different chips. MX98728EC in this application note refer to both MX98728EC and MX98728AEC
for common descriptions. This document presents product overview , programming guide and hardware design
guidelines. It is recommended that you are familiar with
the data sheet of MX98728EC or MX98728AEC before
using this guide.
2. PRODUCT OVERVIEW
The MX98728EC implements the 10/100Mbps MAC and
Physical layer on single chip in accordance with the IEEE
802.3 standard.
PRELIMINARY
MX98728EC
APPLICATION NOTE
The MX98728EC highly integrates with direct host bus
interface, including host bus slave with burst read transfer, direct EEPROM interface ( optional), and large on
chip transmit/receive FIFOs. Also , the MX98728EC is
equipped with intelligent IEEE802.3u compliant Nway
auto-negotiation capability allowing a single RJ-45 connector to link with the other IEEE802.3u compliant device without re-configuration. For detailed product specification information, please refer to the Data sheet of
MX98728EC.
MII (Media Independent Interface) Connection is
provided by MX98728EC and MX98728AEC as an
option to work with third party 10/100 fast Ethernet
tranceiver or ev en Home PNA tranceiv er . P ossible
system application can allow integration of both
Ethernet and Home PNA network in a single system.
P/N:PM0599
REV. 0.6, JUN. 22, 2000
1
3. HARDWARE DESIGN CONSIDERATIONS
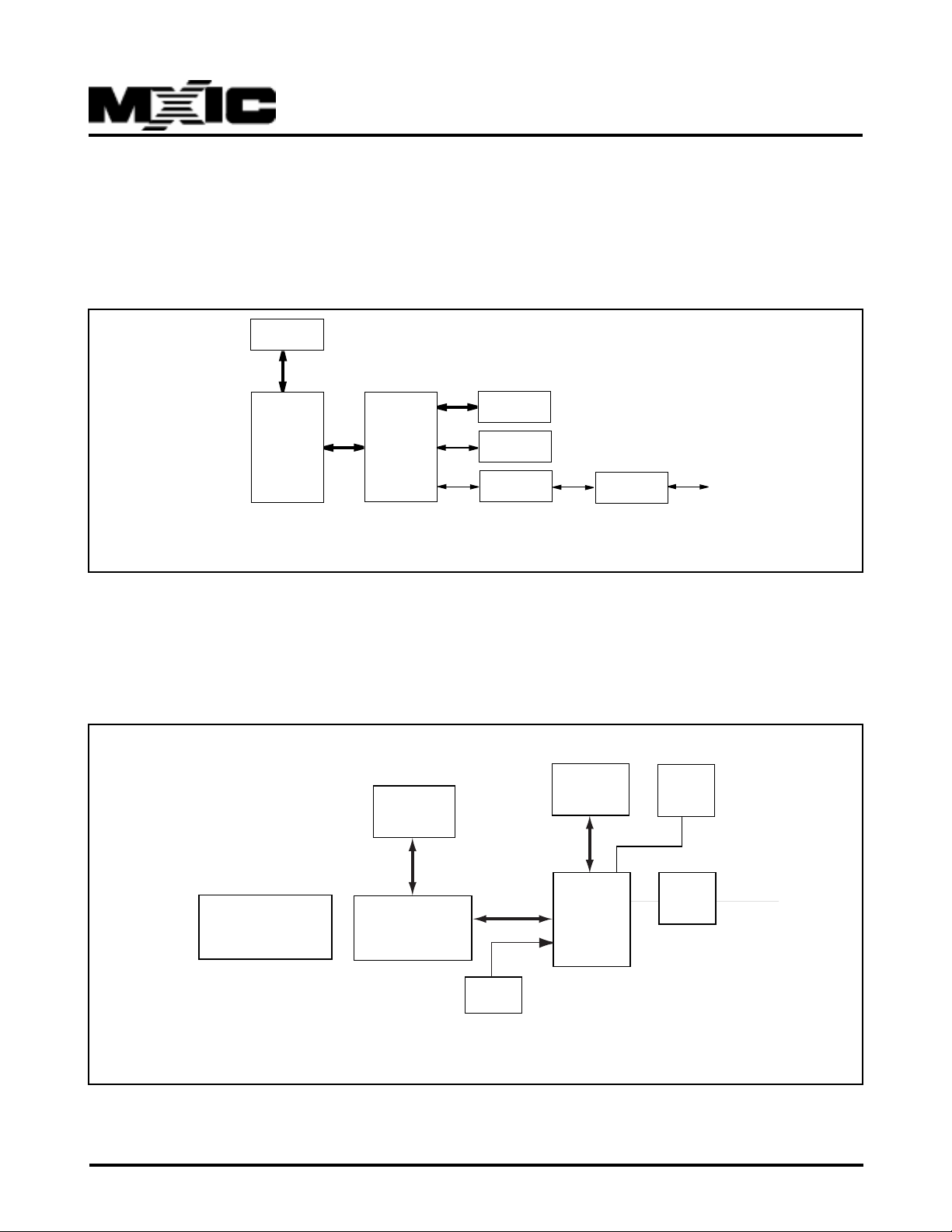
3.1 System Application Block Diagram
A System block diagr am for the MX98728EC based F ast
Ethernet is shown as following.:
Host memory
Host
Customer
Applicatio
MX98728EC
Packet buffer
EEPROM
MX98728EC
Optional
*
*
Typical Application
Customer Application
Magnetic
SYSTEM APPLICATION BLOCK DIAGRAM
Packet
Host Memory
Subsystem
Local DMA
Host
CSB
buffer
MX98728EC
RJ45
EPROM
C46/C66
RJ45
Xformer
TP cable
Decode
TYPICAL APPLICATION
P/N:PM0599 REV. 0.6, JUN. 22, 2000
2
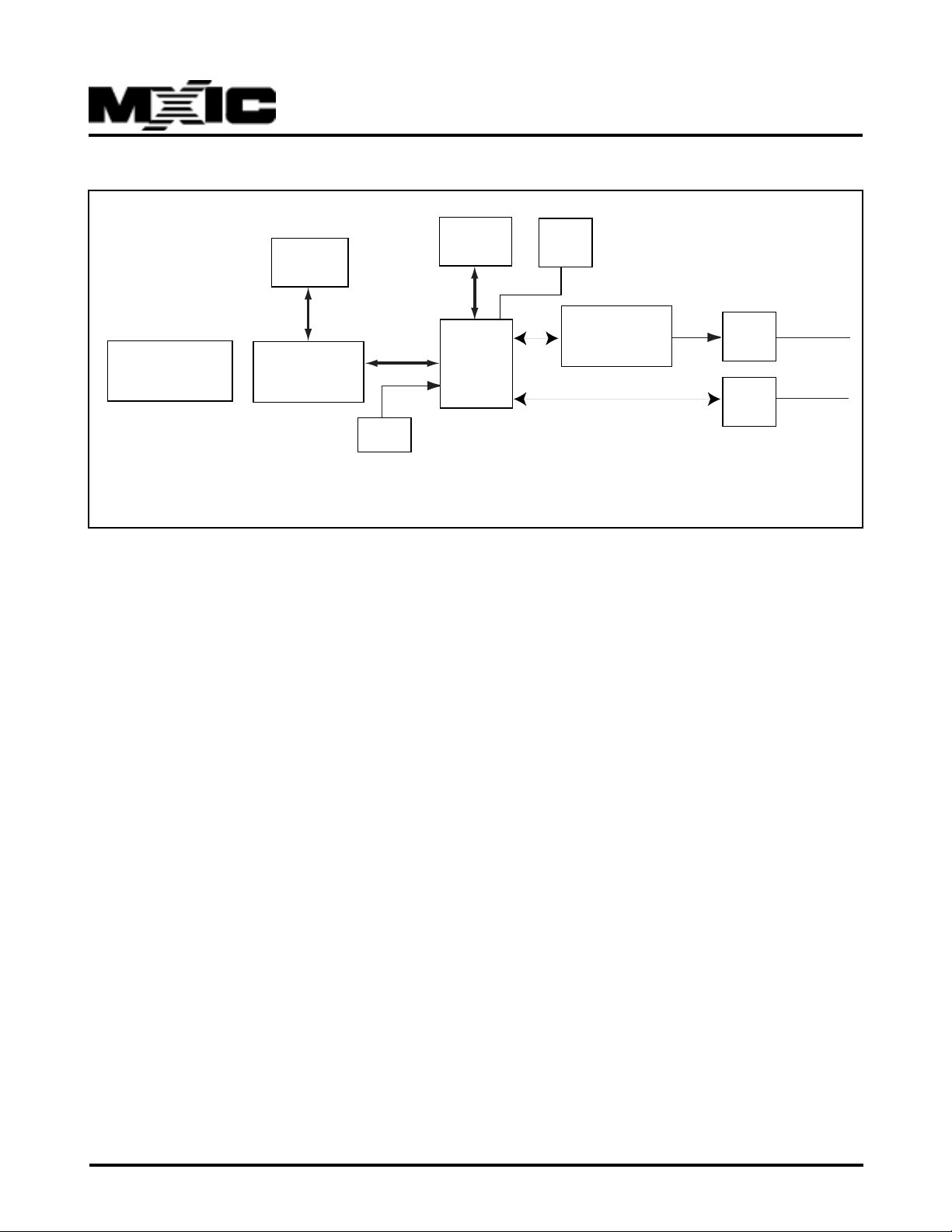
Combo Application
MX98728EC
Host Memory
Customer Application
Subsystem
Host
Decode
Local DMA
MX98728EC
CSB
COMBO APPLICATION
3.2 System Through Put Considerations
Total system through put is determined by several factors, namely, packet memory through put, host bus
through put, and local DMA through put. MX98728EC is
designed to achieve maximum network through put possible in a 100 TX mode with full duplex operation. The
maximum data rate of a full line speed 100M bits /s
Ethernet is roughly 12.5MB/s in half duplex mode and
25MB/s for full duplex mode when IPG is 960ns and all
ethernet packet length is 1518 bytes.
To achieve such high through put, bandwidth requirements for packet memory are as follows :
1.Host <- GMAC <- P acket Memory >=12.5MB/s for RX
2.Host -> GMAC -> P ac k et Memory ( or TX FIFO )
>= 12.5MB/s for TX
3.Network -> GMAC -> Pac k et Memory >= 12.5MB/s
for RX channel
4.Network <- GMAC <- P ack et Memory ( or TX FIFO )
>= 12.5MB/s for TX channel
The total maximum bandwidth of pac k et memory is
50Mhz/2 x 2B = 50MB/s for 16-bit mode
50Mhz/2 x B = 25MB/s for 8-bit mode
Packet
buffer
EPROM
C46/C66
or
1M 8PHY
or
10M 8PHY
RJ11
Xformer
RJ45
Xformer
How to get most throughput in 8-bit packet memory mode
?
If we use TX DMA mode for transmission, then to
achieve full duplex line speed, it will need 12.5MB x 4 =
50MB for all host DMA and GMAC's local DMA. Obviously, 8-bit packet memory does not have so much
throughput. Instead, we must use TX FIFO mode for
transmission, which will require only 12.5MB x 2 of packet
memory to achieve RX's line speed ( assuming that software can deliver the same throughput as well ).
TX FIFO mode does not use packet memory to
store TX pac ket for transmission, therefore RX DMA can
use all 8-bit packet memory bandwidth which is 25MB.
Since GMAC can do "seamless" local DMA cycles, i.e.
every 40ns one packet memory transfer is processed,
no cycle is wasted for bus arbitrations. Also the on-chip
burst read buffer will constantly filling up the 4 word ( 4
dword ) buffer whenever this buffer is not full ( 4 word, or
4 dword ).
Also to maximize TX FIFO throughput will require some serious software intelligence. i.e. software
must fill up TX FIFO as much as possible during the
IPG time ( 960ns ) in order to achieve more outgoing
data.
Phone Line
TP cable
P/N:PM0599 REV. 0.6, JUN. 22, 2000
3
MX98728EC
3.3 CPU Bus connection
The MX98728EC provides direct Generic b us interface
to host bus. Hardware designers should especially take
care of the D[31:0], A[15:0], SRDY, RDB, WRB, INTB,
DREQB, D ACKB, RSTB , CSB, and H16_32.
3.4 OSCILLA TOR/CR YST AL
CKREF (X1), and X2: The MX98728EC is designed to
operate with 25MHz oscillator or crystal module. The
clock specification of this oscillator or crystal should
meet 25Mhz +/- 30PPM. See Appendix A for more details.
3.5 Optional Serial EEPROM
The MX98728EC provides pins EECS, MA2(EEDO),
MA1(EEDI), MA0(EECK), and C46/C66 for directly accessing the serial EEPROM. The contents of EEPROM
includes MAC the ID information of the MX98728EC and
the configuration parameters for software dr iver. The
EEPROM contents should follow the definition in this
application note.
3.6 LED support
The MX98728EC provides two pins LED0 and LED1 to
control display LEDs. Displayed messages are as follows:
LED0: Speed LED , which light is on, it indicates 100Mbps
speed. When off indicates 10Mbps speed.
LED1: Link/Activity LED, when light is stable and on, it
indicates good link. When flashing, indicates TX or RX
activities. When off means bad link.
3.7 Network interface to Magnetic component
For isolating and impedance matching purpose, an isolating transformer with 1:1 transmit and 1:1 receive turns
ratio is required for transmit and receive twisted pair interface. In Appendix A, several transformers that we had
verified successfully.
3.8 MII Interface
MDC and MDIO pin should be both externally pull down
(4.7K) for application that use MII interface to connect
to external tranceiver. If MII interface is not used, both
MDC and MDIO must be grounded or pulled down.
P/N:PM0599 REV. 0.6, JUN. 22, 2000
4.0 Driver Programming Guide
4.1 Hardware reset.
The hardware reset is applied to the MX98728EC's RSTB
pin. The MX98728EC starts to access the commands
from Host after 400ms. In other hands, MX98728EC
starts to access the commands after 400ms from RSTB
pin goes high. Because that it takes time for the analog
transceiver to be initialized.
4.2 Registers Initialization
The MX98728EC must be initialized prior to transmission or reception of packets from the network. The default register content after hardware reset are listed below :
Reg0h:00h
Reg1h:01h
Reg2h:00h
Reg3h:00h(T est Register , not used by software)
Reg4h:xxh(Read only)
Reg5h:xxh(Read only)
Reg7h,6h:0000h
Reg8h:00h
Reg9h:00h
Reg0B,0Ah:x000h
Reg0D ,0Ch:x000h
Reg0F,0Eh:x000h
Reg11,10h:x000h(reserved)
Reg13,12h:x000h
Reg15,14h:0000h
Reg17,16h:x000h
Reg19,18h:0000h
Reg1B,1Ah:x000h
Reg1Ch:00h
Reg1Dh:00h
Reg1F,1Eh:x000h
Reg20~25h:00h
Reg26~2Dh:00h
Reg2Eh:07h(tranceiver option bits)
Reg2Fh:00h
Reg30h:84h(NWAY is in automatic mode)
Reg31h:a valid network mode (Read only)
Reg32h:00h
Reg33h:00h
Reg37~34h:xxxxxxxxh(write only port)
Reg39,38h:0000h
Reg3A:00h
Reg3B:Link Partner's Status(read only)
Reg3C:00h
Reg3D:3Ch
Reg3F/3E:x000h
4
MX98728EC
Reg40~4h:xxxxxxxxh(write only)
Reg45,44h:"MX"(read only)
Reg47,46:"0001"(read only)
Reg4B~4h:xxxxxxxxh(write only)
Reg4F~4h:xxxxxxxxh(write only)
Reg50h:00h
Reg53,52h:0000h(read only)
Set the value in Register IMR Reg08h, for desirable interrupts.
4.3 T ransmit Initialization
1.Allocate the memory for Transmit buffer r ing by programming TLBP and to desired page within the packet
memory. Set TWP and TRP to TLBP page.
2.Set the threshold level which is defined by GCB register TTHD[1:0] or use the def ault value .
4.4 Transmission
1.Write a packet into either the transmit buffer ring or
transmit FIFO.
4.6 Receive Initialization
1.Allocate the memory for receive buffer ring by programming RHBP page register to desired page. Set
RWP and RRP to BP page.
2.Set the threshold level which is defined by RTHD[1:0]
or use the default setup.
3.Set up MAC address in register Reg20-25h if no
EEPROM is used during hardware reset, set up register 26-2Dh for multicast hash table.
4. Programming the desired network address filtering
modes through register 01h.
4.7 Reception
1.Set register bit reg0h.SR bit to enable the reception of
packet.
2.When the first packet begin arriving the MX98728EC
begins to store packet at the location pointed by the
RWP.
2.Issue appropriate transmit command through reg
0h.ST0 and ST1 bits.
3. If a packet transmission is completed, the OWN bit of
current packet's descriptor will be cleared to zero,
and ST0, ST1 bits are internally reset by MX98728EC.
4. F or successful transmission, an interrupt is asserted
by interrupt register bit TI of interrupt register . Driver
can now check Reg04h for last transmission status
or use IORD , IORDP register to read status from transmit descriptor.
4.5 Collision recovery
If the collision is detected before the first 64 bytes of
packet has been transmitted, The FIFO will restore the
necessary FIFO pointers to retransmit the same packet
without fetching the transmitted data from packet
memory.
If After 64 bytes of data transmitted, An out-of window
collision is occurred. This packet will be aborted with
interrupt asserted. OWC bit of transmit descriptor is set
and device driver needs to resolve such situation. And
reissue a transmit command so that MX98728EC can
fetch the entire packet from packet memory again for
retransmission.
3. If a packet is successfully received, MX98728EC will
store the receive status, packet length and next packet
pointer in the receive descriptor located at the beginning of the first page of packet. The status of last descriptor is also stored in the LRPS ( reg05h) .
4.8 Receive Buffer Ring Full
In a heavily loaded network which may cause overflow
of the receive buffer ring, when the last available page
is exhausted and more data needs to be stored for the
current packet then the receive buffer ring is full but
GMAC will continue receiving until RX FIFO is also overflow . At this point, GMAC will do the following actions :
1. Close current received packet with the FO bit ( bit 3 )
and the BF bit ( bit 0 ) of the receive descriptor being
set if a minimum of one page is used by this packet.
2. An interrupt may be asser ted if the RBFI ( register
09h bit 7 ) interrupt bit is set and the RBFIM bit (
register 08h bit 7 ) is also set.
3. If AUTORCVR is set, then the last packet with FO,
BF error will be discarded from the packet memory
and from RX FIFO as well and receiving is resumed
for next packet.
P/N:PM0599 REV. 0.6, JUN. 22, 2000
5
MX98728EC
4. If AUTORCVR is reset, then GMAC can not receive
any more packet. All following packets will be lost
and MPC ( Missed Packet Counter ), registers 07h
and 06h, will be increment automatically. MPC can
be reset by the device driver .
If device driver choose AUTORCVR = 0, the following
procedure is suggested for the device driver to recover
from such an error situation manually .
1. Issue the SR=0 ( NCRA register bit 3 ) which will stop
RX channel to prevent new data from coming into RX
FIFO.
2. Issue RX FIFORST to clean RX FIFO.
3. Remo ve all the received pac kets in the packet memory .
When buffer ring is empty, RRP=RWP.
4. Clear all receive related interrupt flags and then set
the SR bit=1 to resume the receive operation.
4.9 Loopback Diagnostics
Three forms of local loopback are provided on the chip.
The user has the ability to loopback through the internal
FIFO, through the internal NW AY logic and through the
internal PMD transceiver. There is also a 4th loopback
which is widely used for board level diagnostic test which
is called external loopback ( off the chip ) using a real
cable with TX end wired back to RX end. The chip is set
up in a full duplex mode to support this external
loopback.
The loopback capabilities are provided to allow customer
to do in site diagnostic or production tests.These
loopbacks verify the following:
1. Internal FIFO loopback ( mode 1 loopback ):
V erify integrity of data path and FIFOs. Receiv ed data
is checked against transmitted data.
Set up loopback operations in MX98728EC:
1.FIFO loopback ( mode 1 ):
Initialize MX98728EC.
Set LB[1:0] = [0,1] in reg 0h. FIFO loopback.
Set up interrupt IMR register.
Fill the pattern to Transmitted buffer .
Enable the Transmission.
Check reception buffer is completed.
Compare the data of reception with Transmitted buff er.
2. NWA Y loopbac k ( mode 2 ):
Initialize MX98728EC.
Set LB[1:0] =[1,0] in reg 0h for internal NWAY loopback.
Set up interrupt IMR register.
Fill the pattern to Transmitted buffer .
Enable the Transmission.
Check reception buffer is completed.
Compare the data of reception with Transmitted buff er.
3. Internal PMD loopback ( mode 3 ) :
Initialize MX98728EC. Set network speed first.
Set LB[1:0] = [1,1] in reg0h for internal PMD loopback.
Set up interrupt IMR register.
Fill the pattern to Transmitted buffer .
Enable the Transmission.
Check reception buffer is completed.
Compare the data of reception with Transmitted buff er.
4. External loopback ( normal mode in full duplex ) :
Initialize MX98728EC. Set network speed first.
Set LB[1:0] = [0,0] in reg0h for normal mode.
Set FD bit =1 in register30.0 for full duplex.
Set up interrupt IMR register.
Fill the pattern to Transmitted buffer .
Enable the Transmission.
Check reception buffer is completed.
Compare the data of reception with Transmitted buff er.
2. Internal NW AY loopback ( mode 2 loopback ):
V erify 5B/4B interface , scramb le/descr amble logic ,
serial to parallel interface logic.
3. Internal PMD loopback ( mode 3 loopback):
V erify tranceiver's functionality and fundamental transmit and receive logic.
4. External loopback ( normal mode in full duplex):
Verify FIFO, Nwa y and PMD all at the same
time.
P/N:PM0599 REV. 0.6, JUN. 22, 2000
6
MX98728EC
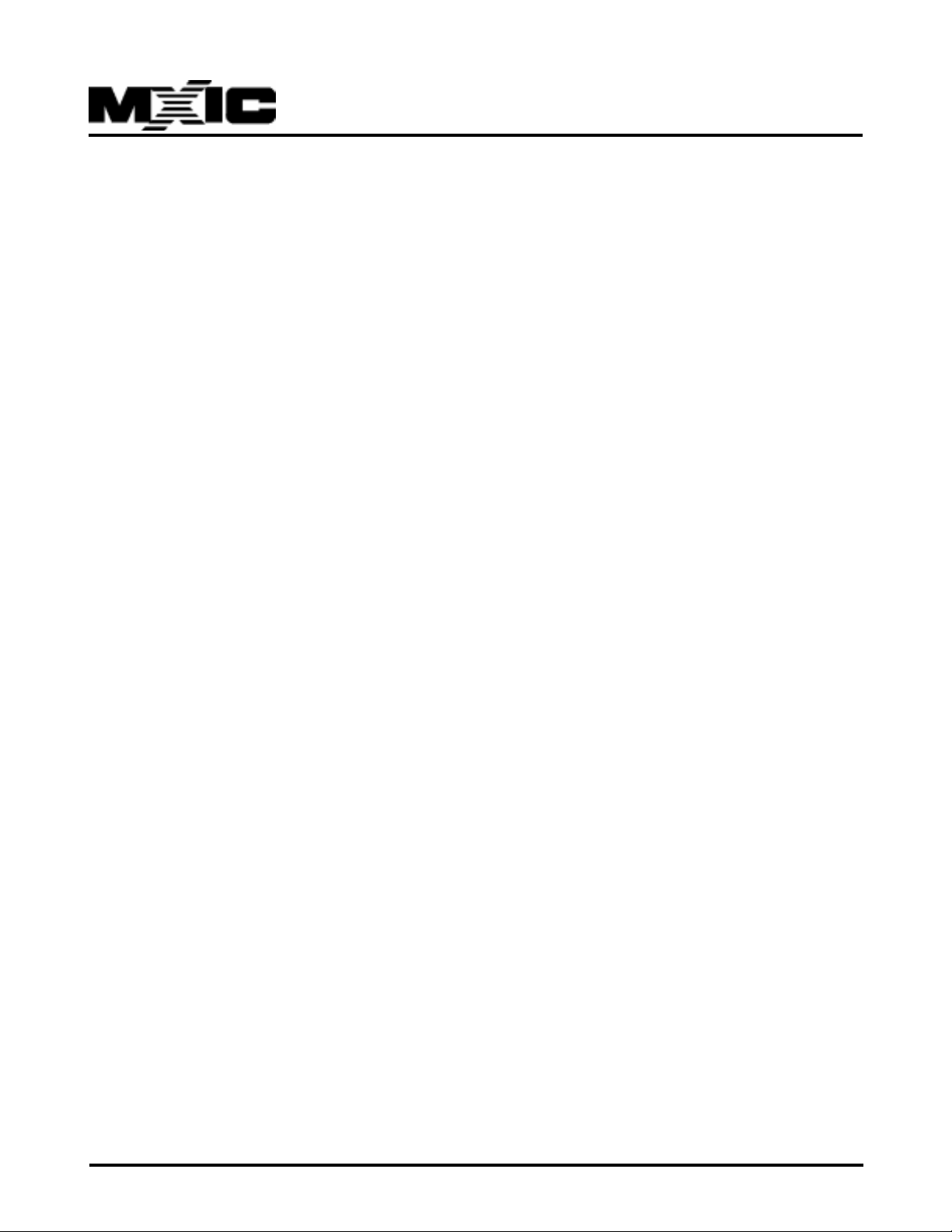
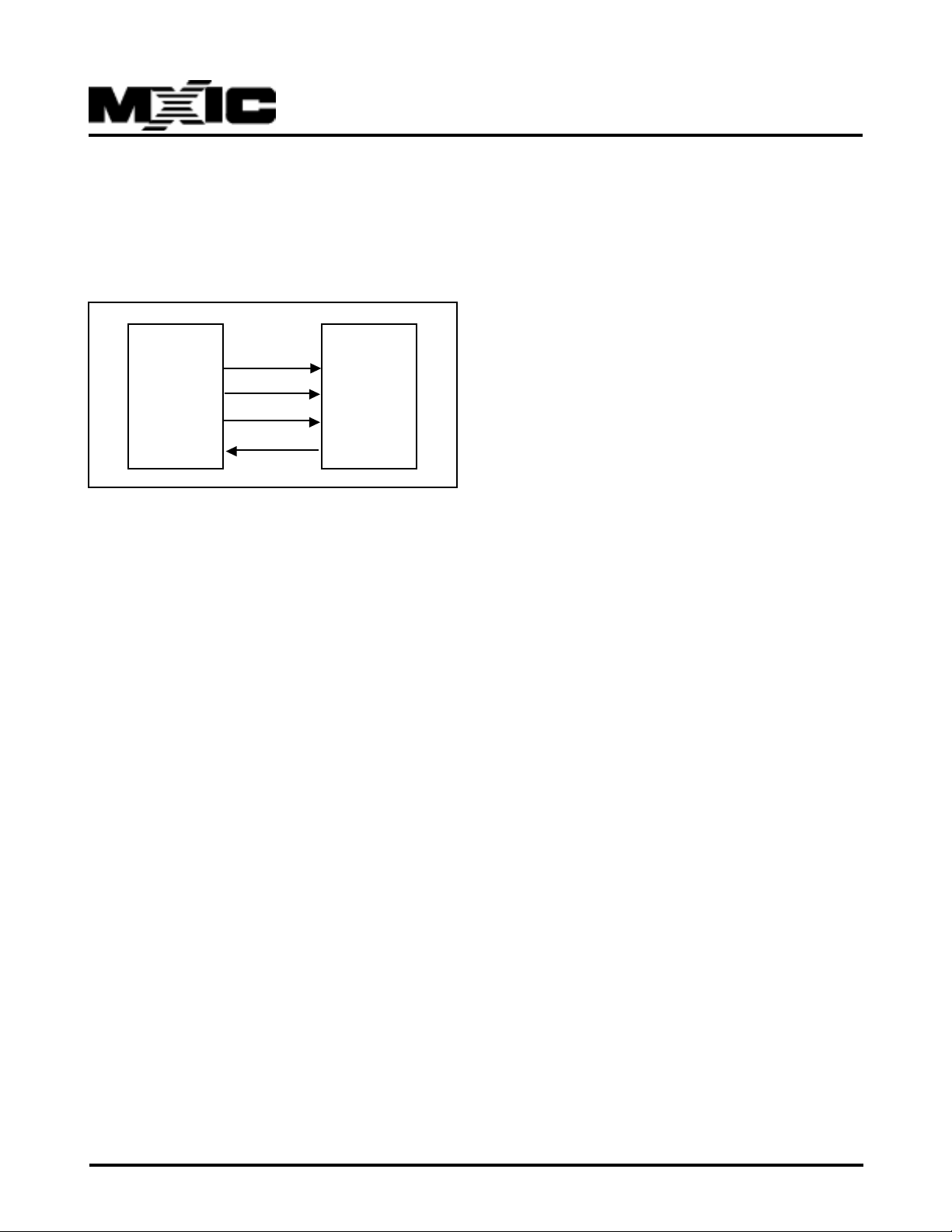
5.0 Serial ROM ( EEPROM ) Interface
Serial ROM Connection
EEDO - Serial ROM (EEPROM) Data Out = Register
1Ch, bit 3
GMAC
EESC
EECK
EEDI
EEDO
EEDI - Serial ROM (EEPROM) Data In = Register1Ch,
bit2
EECK - Serial ROM (EEPROM) Serial Clock = register
1Ch, bit 1
EECS - Serial ROM (EEPROM) Chip Select = register
1Ch, bit 0
EESEL - must be set to enable the EEPROM access
by register 1Ch, bit 4
5.1 Software Programming Interface
A read operation consists of three phases :
1. Command phase - 3 bits ( binary code of "110")
2. Address phase - 6 bits for 256- to 1K-bit ROMs ( C46/
C66 pin is high), 8 bits for 2K- to 4K-bit ROMs ( C46/
C66 is forced low )
3. Data phase - 16 bits for all type of EEPROMs.
Serial ROM
(Micro Wire)
SK
CS
DIN
DOUT
These phases are generated through a sequence of writes
to 1Ch. In certain action, the driver must wait until the
minimum timing requirement for the serial ROM operation is met in order to advance to the next action.
The software sequence is available in the C source code
from MXIC.
A typical read cycle can look like this(EESEL bit is set
)
Write register 1Ch 10H ( >= 30ns )
Write register 1Ch 11H ( >= 50ns )
Write register 1Ch 13H ( >= 250ns )
Write register 1Ch 11H ( >= 100ns )
Write register 1Ch 15H ( >= 150ns )
Write register 1Ch 17H ( >= 250ns )
Write register 1Ch 15H ( >= 250ns )
Write register 1Ch 17H ( >= 250ns )
Write register 1Ch 15H ( >= 100 ns )
Write register 1Ch 11H ( >= 150 ns )
Write register 1Ch 13H ( >= 250 ns )
Write register 1Ch 11H ( >= 100ns )
Write register 1Ch 00H ( >= 150 ns )
Write register 1Ch 00H ( >= 250 ns )
Write register 1Ch 00H ( >= 100ns )
Write register 1Ch 03H ( >= 100ns )
Read register 1Ch.3 = DX ( >= 150ns )
Write register 1Ch 01H ( >= 250ns )
Write register 1Ch 00H ( >= 100ns )
END
P/N:PM0599 REV. 0.6, JUN. 22, 2000
7
A Write operation consist of three phases :
1. Command phase - 3 bits ( binary code of "110" )
2. Address phase - 6 bits for 256- to 1K-bit ROMs, 8 bits
for 2K- to 4K-bit ROMs.
3. Data phase - 16 bits.
These phases are generated through a sequence of writes
to 1Ch. In certain action, the driver must wait until the
minimum timing requirement for the serial ROM operation is met in order to advance to the next action. A
typical driver sequence can look like this
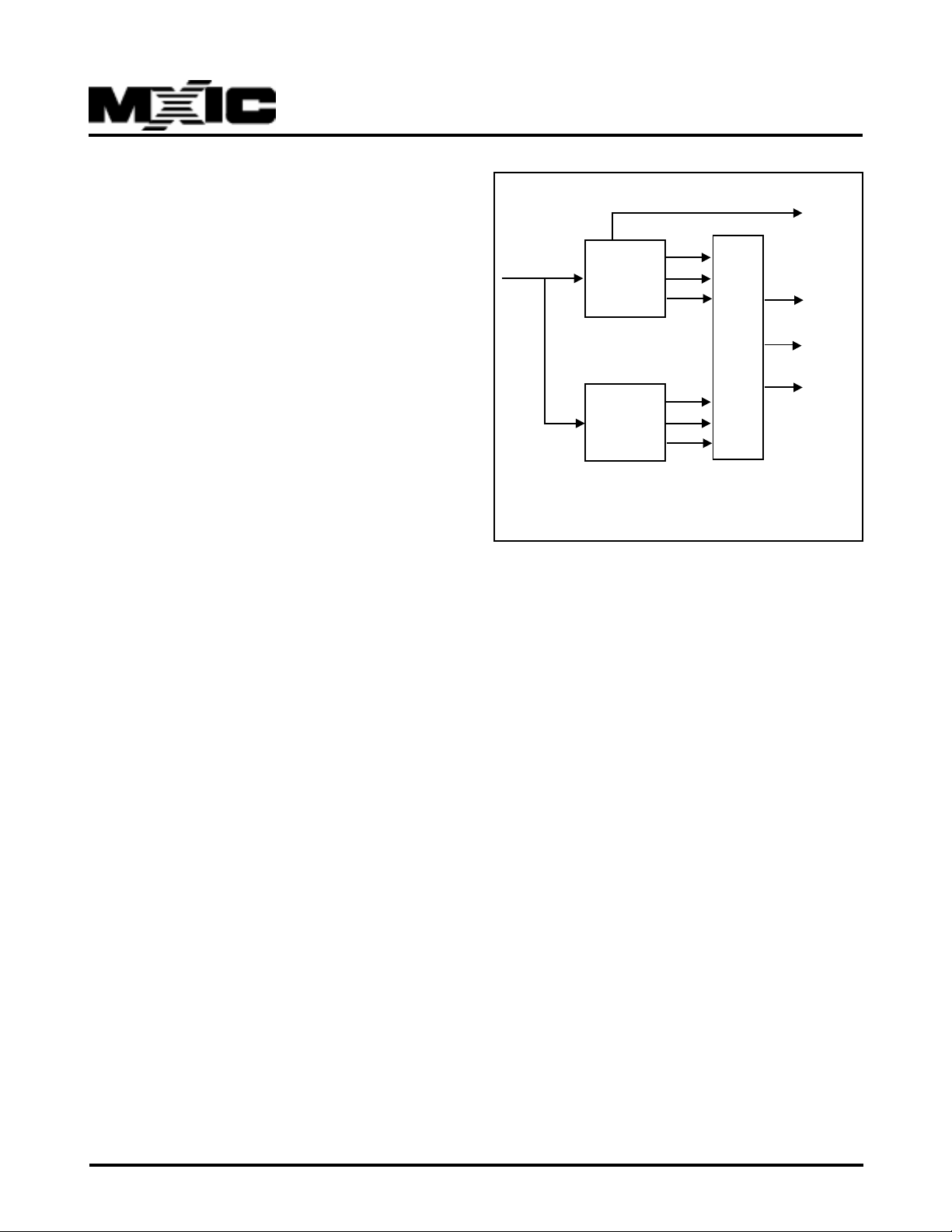
(from eeprom)
EEDO
MX98728EC
Register 1Ch
MUX
EEDI
EECS
EECK
Write register 1Ch 00H ( >= 30ns )
Write register 1Ch 01H ( >= 50ns )
Write register 1Ch 03H ( >= 250ns )
Write register 1Ch 01H ( >= 100ns )
Write register 1Ch 05H ( >= 150ns )
Write register 1Ch 07H ( >= 250ns )
Write register 1Ch 05H ( >= 100ns )
Write register 1Ch 01H ( >= 150ns )
Write register 1Ch 03H ( >= 250 ns )
Write register 1Ch 01H ( >= 100 ns )
Write register 1Ch 05H ( >= 150 ns )
Write register 1Ch 07H ( >= 250 ns )
Write register 1Ch 05H ( >= 100ns )
Write register 1Ch 00H ( >= 150 ns )
Write register 1Ch 00H ( >= 250 ns )
Write register 1Ch 00H ( >= 100ns )
Write register 1Ch 03H ( >= 150ns )
Write register 1Ch 0XH ( >= 250ns )
Write register 1Ch 0XH ( >= 100ns )
EEDI
(to eeprom)
Auto Load
EEPROM Logic
Serial ROM Interface Block Diagram
Write register 1Ch 00H ( >= 250ns )
Write register 1Ch 01H ( >= 250ns )
*Read register 1Ch.3
if register 1Ch.3 = 1 then go on
Write register 1Ch 00H ( >= 250ns )
else
Wait 1 ms then go to *Read register 1Ch.3
END
P/N:PM0599 REV. 0.6, JUN. 22, 2000
8
MX98728EC
5.2 Autoload Function
The Autoload Function is executed only once after the hardware reset pin RSTB from low to high. At that time the
Serial ROM interface is driven by the internal circuit to load the data of the Serial ROM.
5.3 EEPROM Content ( suggested )
Location Content
00H Physical Address Byte 0 : PAR[7:0] ( MSB )
01H Physical Address Byte 1: PAR[15:8]
02H Physical Address Byte 2 : PAR[23:16]
03H Physical Address Byte 3 : PAR[31:24]
04H Physical Address Byte 4 : PAR[39:32]
05H Physical Address Byte 5 : PAR[47:40]
06 H GMAC Configuration A Register : GCA[7:0]
bit 0 : BPSCRM
bit 1 : PBW
bit 2 : SLOWSRAM
bit 3 : ARXERRB
bit 4 : MIISEL
bit 5 : A UT OPUB
bit 6 : TXFIFOCNTEN
bit 7 : RESER VED
07H reserved
08H-END Reserved for Software application
P/N:PM0599 REV. 0.6, JUN. 22, 2000
9
 Loading...
Loading...