


Metal and Water Finder
WF 202 PRO +
USER MANUAL
The WF 202 PRO + is the latest device to detect
.the dierent types of water in the ground
WWW.MWF-USA.COM
Contents
Metal and Water Finder
Contents
Safety information
Technical specification
Device parts
Main control unit
Settings
Start work
Line Tracker System
HandHeld LRL System
Charge setting
Notes
Page
Page
Page
Page
Page
Page
Page
Page
Page
Page
Page3334
1
2
3
5
6
10
17
17
24
Page 1
Technical
The operating in high voltage areas would
limit the results and performance
Don't operate two devices with same
method of search at the same place
Disconnect the batteries before long
time storage
Any attempt to tamper the device or
unapproved maintenance would void
the warranty
The cell signal interferes with the device
signal, so turn o the cell while operating
Don't store in high temperature or high
humidity
The operator Must remove any metals
that might aect the opreatin e. g.:
Rings,watch, belt....
For devices that work on replaceable
batteries, use good quality batteries to work
longer hours.
The user must practice before starting the detecting operations and
discoveries
Store in Cool and dry place 15-40 C 5%-75% humidity
Read & Understand
The User's manual
before using this device
Page
2
Technical
Search System:
Search Principle:
Operating Processor:
Operating Frequency:
Power Rating:
Power Consumption:
3
Battery Endurance:
Charger
Display:
Multiple Search Systems:
1- Long Range Locator ( Hand-held)
2- Long Range Locator (Line Tracking)
1- Digital Frequency Signal Processing (DFSP)
To receive the electrostatic fields of target.
MICROCONTLLER PIC18 & ARM 7
1- From 9 KHz to 11 KHz for LRL system
7.4 V / 3000 mAh
Max power 150 mAh
15 Working hours
5.1 V DC / 3 Amps
3.2 ” TFT LCD Display, 16 bit color depth
CDMA GPU @ 48 MHz
Targets
Target Discrimination: YES
Selective Target Mode:
Search Depth
Natural water - Mineral water - Salt water - All types of
water.
YES, The water type of the interface can also be selected
before The research began.
450 Mt with Selective Depth control system in the depth
menu.
Page
3
Technical
Search Distance:
Search Results:
Bluetooth: NO
Wireless
communications:
Smart Auto guiding
System:
Audio notications:
Vibration notications:
Operating Temperature: From (5° F) to (140° F) / From (-15 °C) to ( 60 °C)
Storing Temperature
2000 m, with a system to control the front search
distance levels through the distance control interface
By signals and routing data to the water site in addition
to the results of voice alerts
YES
NO
YES
NO
From (5° F) to (95° F) / From (-15 °C) to ( 40 °C)
Humidity:
Weight:
Dimensions:
Case Dimensions:
Store and operate within 90% humidity ratio
7.75 Lbs (3.5Kg) with all the Accessories, 12.25 Lbs (5.5 Kg)
for the case.
mm 185X135X53
mm 450x330x150
Page
4
Device parts
The main unite
The device's main controller determines the search
criteria and settings of the device and communi-
cates with the attached search units via wireless
connection.
The charger
Electric charger to recharge the device battery
Values: Input: 100 - 240 V Alternate / 50 - 60 Hz / 0.4 Amps
Output: 5 volts continuous / 3 amp / 15 watts.
Soil Support Unit (Ground Transmitter)
This unit is connected to the main unit of the device
and then connected to the soil to be responsible for
transmitting and transmitting the frequency waves
coming out of the device to the ground.
Receiver + Receiver Antennas
The reciver antennas connect to the receiver through
special wires. These antenna missions follow the
waveform that is connected to the target with the
intercept system and the visual effect
Page
5
Device parts
Wireless antenna
The wireless communication antenna is responsible
for sending commands and settings entered from the
main console to the search units and systems that
are attached to the device.
Hand Held Locator
The unit is based on remote detection and search
technology to locate and monitor targets from long
distances, directs the user and leads him directly to
the water site, with the laser steering system, receiving
commands and seizures from the main unit wirelessly.
Page
6
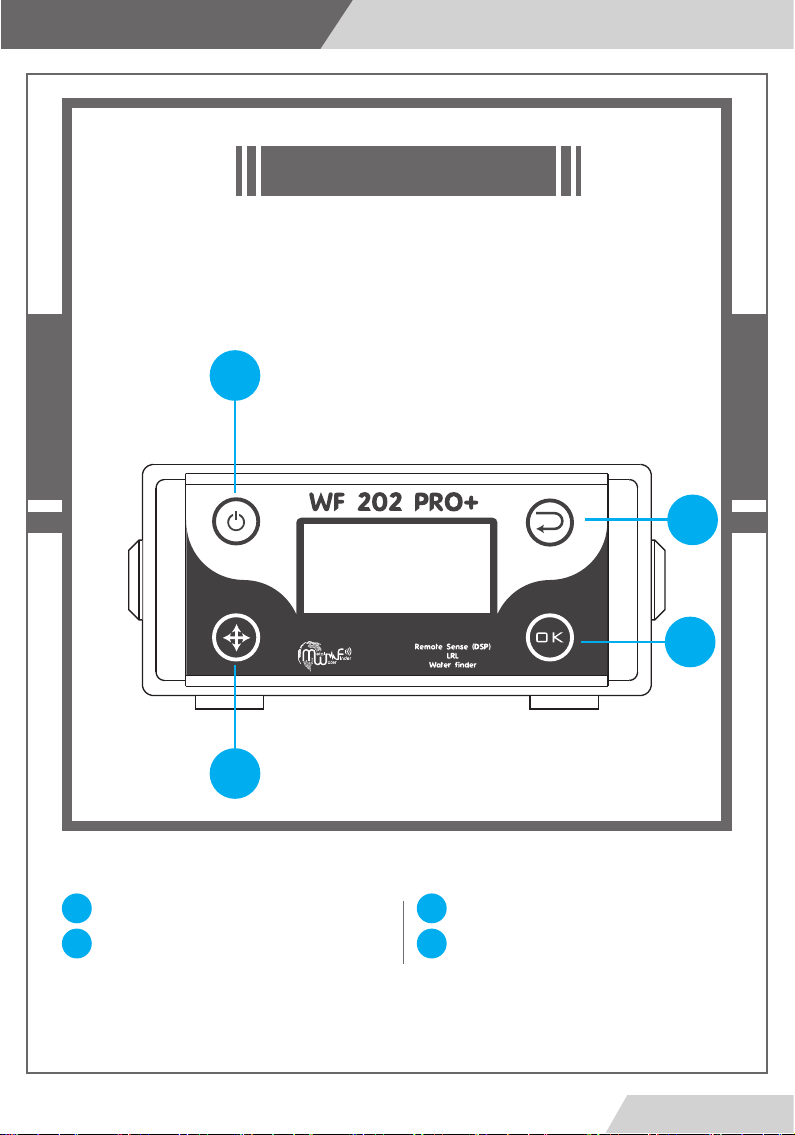
The main unite
Front elevation
1
2
Power ON/OF
1
(Back) button
2
4
(Enter) button
3
(Move) button
4
3
Page
7
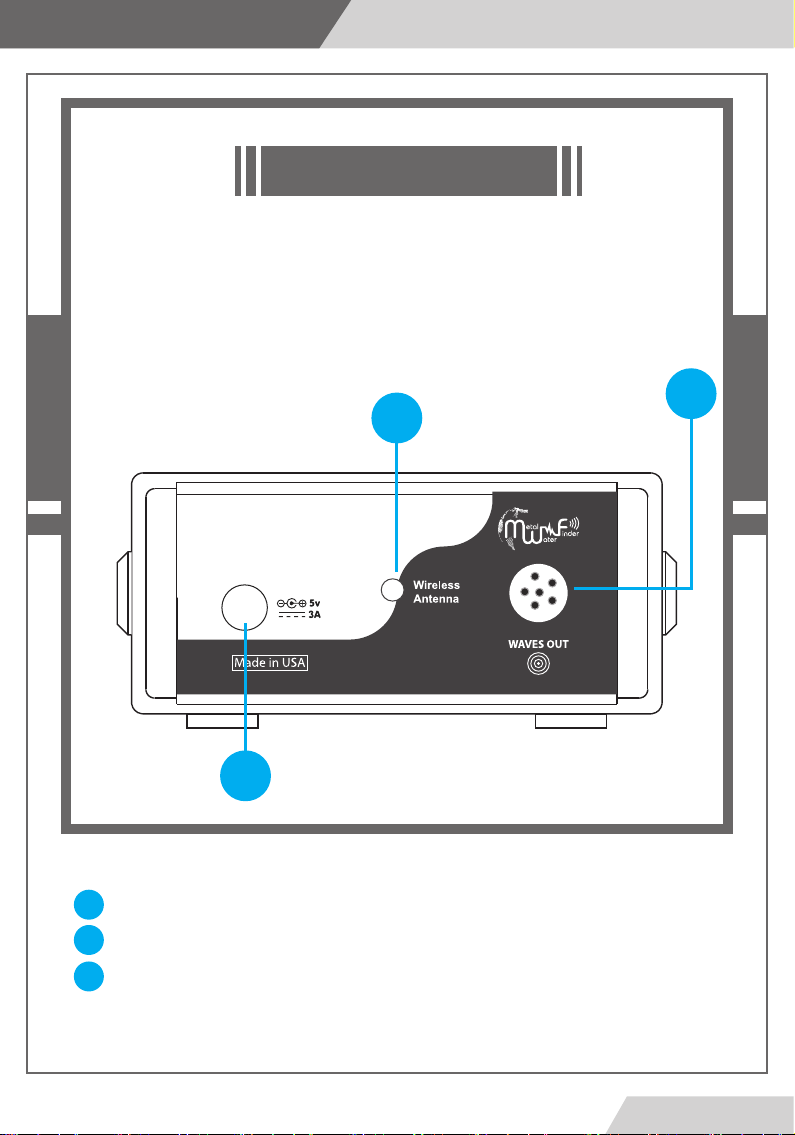
The main unite
Back elevation
5
6
8
7
Socket connecting the soil support unit
5
Wireless antenna jack
6
Plug the charger
7
Page
8
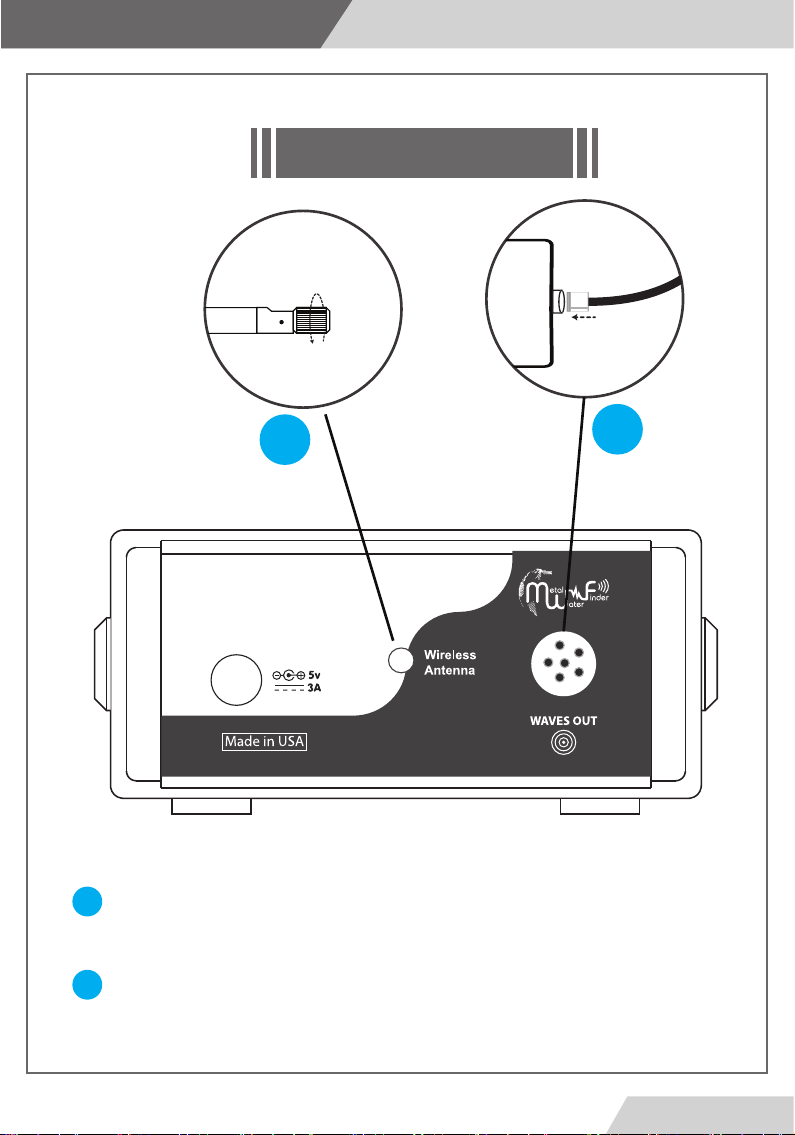
The main unite
Connection method
1
Connect the wireless antennas to the designated area as shown on
1
the graphic.
Connect the soil support unit to the machine with its input and then
2
connect it to the ground as shown in the diagram.
2
Page
9
Sitting
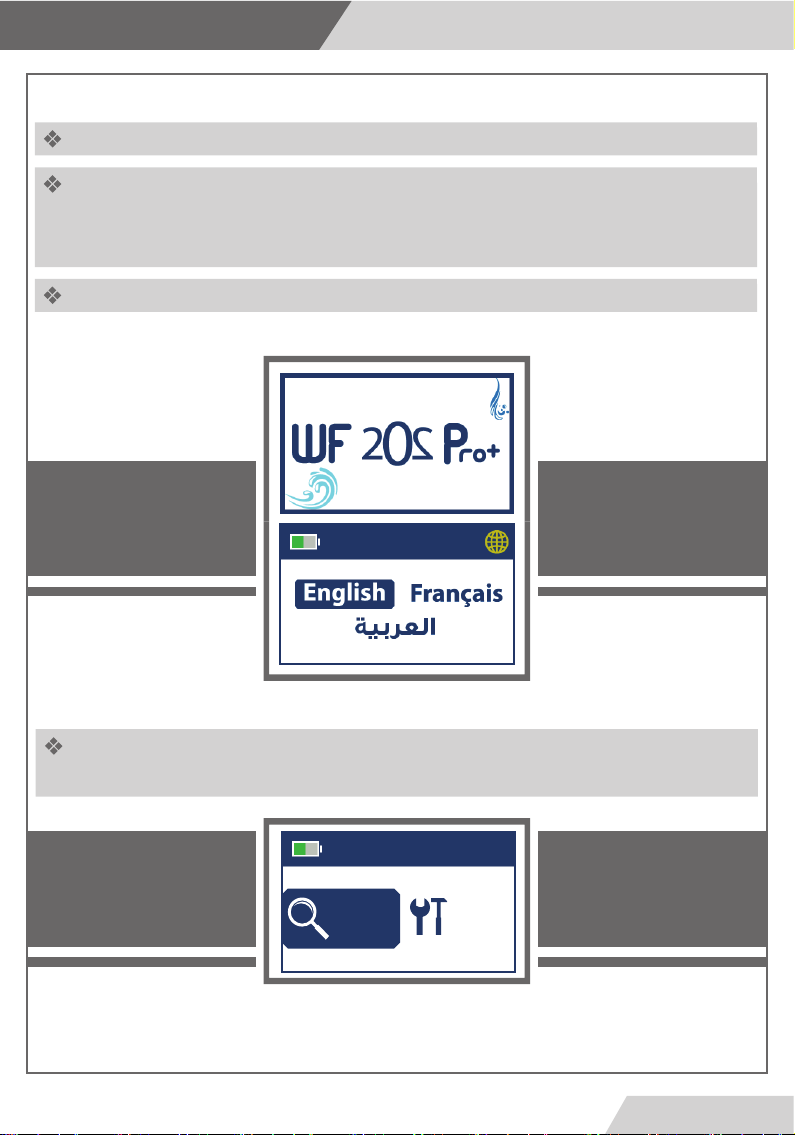
Turn on the device by pressing the power switch
Will appear on the screen after the definition of the name of the device, will
appear in the list of languages the user must choose the language control
device, by going to the language to be selected by pressing the MOVE key.
Language is emphasized by pressing the ENTER key.
After selecting the required language and pressing Enter, the main menu
is moved.
Main menu
Recherche
Settings
Page
10

Sitting
We choose the settings from the main menu to go to the main settings
menu:
Settings
Brightness options: To control the brightness of the screen, select the Bright-
ness option and press the Enter button. Change the value from 10% to 100%.
Audio Options: To set the sound alarm values, select the option and press
the Enter button to change the volume from 1 to 5 or you can hide the
sound completely.
Language Options: To change the system language, select the language
option, press the Enter button, and select the required language and
confirmation.
After completing the main settings, press the Back button to return to the
main menu.
Page
11

Sitting
After you have finished setting the main device settings and return to the
main menu, we select a search from the menu to show us the search
settings list:
Search criteria (specify values for distance and depth)
Type of target (
Start your search
Note :
The user must set up all search options before pressing Start Search.
through this option we specify the type of water to be searched for)
Main menu
Recherche
Settings
The first operationStart search
Select the water type: by going to the target settings by pressing the scroll key
(MOVE) and enter the list of types of water by pressing ENTER and the list of
water types will appear on the screen that can be searched:
Fresh water, salt water, mineral water, all kinds of water
And select the water to be searched by pressing the MOVE button. If the water
type is pressed, the ENTER key is pressed,
Search
Target
Start Search
Parameters
Page
12

Sitting
Types of water:
Mineral water
fresh water
Saltwater
All types of water
Target
Target
Water type:
Target
Water type:
Target
Water type:
Mineral Water
Fresh Water
Salty Water
All types
Water type:
Page
13

Sitting
When you select the water type and press the Enter button, it will automati-
cally exit to the main menu of the search settings.
Start search
Here you must go to the second setting of the settings menu, which is the
search criteria
Then set the distance and depth parameters by using the Move button to
move between the distance and depth values.
Parameters
Distance
Depth
The search and depth distance is then confirmed by pressing the ENTER key
to exit automatically to the search settings menu again.
Second operation
Page
14

Sitting
Start search
When you have finished selecting the search options go to the start option
and press the Enter button to select the search method.
Search
Target
Start Search
Parameters
In the meantime, the device is ready and ready to search,
You can start searching through one of the tracking systems available
with your device.
Search method
Line tracker Hand held
Important Not:
To reset the device settings again or to change the type of water, distance
or depth, you can press the ESC key to restart the device and start the
settings again.
Page
15

Start work
Line Tracker system
Line tracking system
(Line Tracker)
Remote Sensing
Page
16

Start work
Line Tracker system
We choose to search via the line tracking system by pressing the "Move"
button and selecting "Track the line" from the menu and then pressing "Enter"
Search method
Line tracker Hand held
Serching
Target
Distance
Depth
All types
Page
17

Start work
Line Tracker system
6
1
2
3
4
Power Switch
Slide down to switch ON
Make sure the Tracker is o
before storage.
Status LED
Indicates the Line Tracker connectivity
with the main unit.
Red = Disconnected
Green = Connected
Volume Button
Press to change the volume or to
mute the unit.
Speaker
in the back of the Tracker
4
Battery Compartment
5
To connect a 9VDC battery as
shown in the gure below
3
2
1
5
Connect the rods to the antennas then connect the unit in the top to the antennas by the
6
attached cable.
Page
18

Start work
Soil
1 3
Line Tracker system
4
2
Target
The Target is aected by the earth electrostatic and magnetic elds
1
The tuning and transmitting unit transmits a electro-frequency waves to determine target
2
location
The out waves spread through the earth which stimulate the formed elds around the target
3
identify it and forming a power lines
The line Tracker device receives the power lines that connected to the target to determine the
4
location
Page
19

Start work
To start the search and check for water, we can use the visual tracking system through the receiver
and reception antennas.
Line Tracker system
Note:
If there is water in the search area, the device has formed a frequency line between the device and
the water location. In the absence of water in the search area, there will be no contact of the device
waves with the water to be searched.
Soil
Water location
Soil
If there is water, the device is installed
Power lines with water
In the absence of water does not constitute
The device has no contiguous lines
Page
20

Start work
Then rotate around the transmitter unit in a circular way,
A - If there is water in the search area, you will receive a signal from the antenna receiver, that signal
is the intersection of receiving antennas above a point, the point of direction of the power line
connecting between the device and the location of water
Line Tracker system
B- In the case of rotors around the transmitter unit 360 degrees and we did not get any intersec-
tion, indicating that there is no water to be searched in the search area.
AB
No water
There is water
Setting and
sending unit
2 M
Page
21

Start work
Line Tracker system
Method of locating water (Phase1) :
After preparing and processing the receiver for the research, install the receiver unit on the belt or
put it in the pocket and then measure the distance of two meters from the location of the soil
support unit (transmitter) responsible for transmitting waves, and then carry antennas in the form
of a horizontal and horizontal with the ground, A 25-cm antenna, with the right antenna rising from
the left antenna 1 cm or 1.5 cm as shown in the diagram.
2 CM
20 CM
Setting and
sending unit
2 M
Page
22

Start work
When passes the water point there
will be no more intersecting again
which means that the antennas are
beyond the target point and they
will turn back .
Walk and track the power line
through the intersection of the
antennas over the power line
Line Tracker system
The midpoint between the last
intersecting point and the rst
rotation point is the target point
The antennas will intersect towards
the power line leading to the water
location
The antennas will get parallel and
open when exit the power line
Rotate around the device
with 2 meters radius
Page
23

Start work
Handheld LRL system
(Handheld LRL)
Long Range Locator
Page
24

Start work
Handheld LRL system
We select the search by the mobile researcher system by pressing the
"Move" button and selecting the mobile unit from the list and then press the
"Enter"
Search method
Line tracker Hand held
Serching
Target
Fresh water
Distance
Depth
Page
25

Start work
Handheld LRL system
2
Hand-held LRL Unit
1
Transceiver Antenna
2
Handling Grip
3
1
3
Page
26

Start work
1
2
Handheld LRL system
-
+
-
+
+
-
4xAA
Batteries
Plug the antenna to the jack in
1
front of the Handheld LRL Unit.
Connect the grip to the socket
2
in the bottom of the Unit.
Put 4xAA Batteries in the battery compartment
3
and pay attention to the polarity.
Note:
For the best product life use High quality batteries and remove them before storage.
3
+
-
Page
27

Start work
7
Handheld LRL system
1
Antenna Jack
1
6
2
3
4
5
Status indicator
5
Power Button
2
Target Selection Button
3
Laser Button
4
Target LEDs
6
Laser Pointer Out
7
Page
28

Start work
The user must carry the device by grip horizontally slightly sloped towards ground as shown in
the gure below
Soil
Then stimulate the device’s waves and output elds by moving the device right and left slowly
then stop the device.
Handheld LRL system
Left
Right
Moving sideways
Page
29

Start work
In the case of a located target , the device will receive signal and a reading that will divert the
device from the normal track to another track which is the water location track,
then the device will steady at the same direction ,in the meantime rotate fully around the direction
that the device went toward until reaching the opposite and notice the track change once more
and go toward the water.
then get 30 m sideway from the rst reading point and stimulate the device’s waves and steady the
device and wait for the result if the water is legit the device will rotate towards the same point
again therefore the water have been conrmed.
For more accurate reading and determining repeat the step from dierent points , and if all the
tracks intersect in a point then it is the water location.
2nd Reading
3rd Reading User
User
1st Reading
User
Handheld LRL system
Target
To conrm after the water location, select a lower space value and repeat the previous steps.
Intersection
Point
Page
30

Start work
How to Locate Target
Initially the user must direct the scanning antennas down slightly towards the ground.
After ensuring multiple readings towards the target. Start walking in the same direction holding
the device normally . until you reach the passing point you will notice that the device rotates
around the normal track towards the point. Rotate with device slowly and start walking towards
the target slowly until you reach the point where the device rotates right and left then you have
located the target point.
Handheld LRL system
Soil
Device rotates around the track
when passes the water location
Water
Page
31

Start work
Handheld LRL system
There is another way to locate the water location more accurately, (Square method) take 4
dierent readings for the target from 4 angles forming a square 3 m from water location the
intersection point of the for readings is the water location.
User
User
Device Direction
Device Direction
water
Device Direction
Device Direction
User
User
The user can see the approximate depth of the target by going back to the main menu, Select the search
settings again, and changing the depth level through the depth list. For example, if the depth specied is
the rst time 5 meters we reduce the depth to 3 meters and enter the information, And we move away
from the water location 20 meters and carry the device and wait for reading the water location, if there is
a reading of the water location here we know that the depth may be between 3 meters, and we do this
process to reduce the depth until we know the approximate depth of the water location.
- Second method of depth determination:
After conrming the point of the target, we reduce the search distance to the lowest level and
maintain the depth of the search to the highest level and complete the steps of work, and stand in
the detection unit specied above the water location directly and we go in a dierent direction of the
transmission unit at medium speed until the unit circumvent the water location and measure the
distance resulting from this The point to thewater location is the depth of the water.
Page
32

The Charge
Notes:
-The device will make a beeping sound when the battery is full and the charging is done, so disconnect
the charger when the notication is heard.
-An indicator will show the charging progress in the upper corner while the device is working.
-To ensure the performance of the device is kept in best state, Turn the device o and remove any
batteries before storing.
Main menu
Battery
low
Setting
Page
33

Notes
Page
34

Metal and Water Finder
United States of America - illinois
www.mwf-usa.com
info@mwf-usa.com
+1 ( 708 ) 364 9602
Turkey - istanbul
www.mwf-metaldetectors.com
info@mwf-metaldetectors.com
+90 ( 212 ) 222 0946
+90 ( 212 ) 222 0947
 Loading...
Loading...