

Page 1
IC Radio Standards Specification: RSS-247
Manufacturer: Murata Electronics North America
Certification Exhibit
FCC ID: HSW-CCT900
IC: 4492A-CCT900
FCC Rule Part: 15.247
ACS Project Number: 16-0029
Model: CCT900
Manual
5015 B.U. Bowman Drive Buford, GA 30518 USA Voice: 770-831-8048 Fax: 770-831-8598
Page 2
Page 1 of 90
CCT900
CCT900 Series
900MHz Spread Spectrum
Wireless Transceivers
Integration Guide
Page 3
Page 2 of 90
CCT900
Important Regulatory Information
MURATA Product FCC ID: HSW-CCT900
IC: 4492A-CCT900
NOTE: This equipment has been tested and found to comply with the limits for a Class B digital
device, pursuant to part 15 of the FCC rules. These limits are designed to provide reasonable
protection against harmful interference when the equipment is operated in a residential installation. This equipment generates, uses, and can radiate radio frequency energy and, if not
installed and used in accordance with the instruction manual, may cause harmful interference to
radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to raido or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try
to correct the interference by one or more of the following measures:
• Reorient or relocate the receiving antenna
• Increase the separation between the equipment and receiver.
• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.
• Consult the dealer or an experienced raido/TV technician for help.
Warning: Changes or modifications to this device not expressly approved by MURATA could void the
user’s authority to operate the equipment.
RF Exposure Information:
For mobile operating conditions >20 cm to the body, the CCT900 has been designed to operate with
dipole antennas of up to 5 dBi gain, or panel antennas of up to 8 dBi gain or Yagi antennas up to 8 dBi
gain or a planar inverted F type antenna up to 4dBi gain.
This equipment complies with FCC radiation exposure limits set forth for an uncontrolled environment.
This equipment should be installed and operated with minimum distance 20 cm between the radiator and
your body. This transmitter must not be co-located or operating in conjunction with any other antenna or
transmitter.
For mobile operating conditions >30 cm to the body, the CCT900 has been designed to operate with
panel antennas of up to 12 dBi gain or Yagi antennas up to 9 dBi gain. Antenna types not included in this
list, or having a gain greater than the maximum gain indicated for that type, are strictly prohibited for use
with this device.
This equipment complies with FCC radiation exposure limits set forth for an uncontrolled environment.
This equipment should be installed and operated with minimum distance 30 cm between the radiator and
your body. This transmitter must not be co-located or operating in conjunction with any other antenna or
transmitter.
Page 4

Page 3 of 90
CCT900
Pour les conditions d'exploitation mobiles> 20 cm à l'organisme, l'CCT900 a été conçu pour fonctionner
avec les antennes dipôles de jusqu'à 5 dBi, ou des antennes de panneaux allant jusqu'à 8 dBi ou antennes Yagi jusqu'à 8 dBi ou un plan inversé F Type d'antenne à gain de 4 dBi.
Cet équipement est conforme aux limites FCC d'exposition aux radiations dans un environnement non
contrôlé. Cet équipement doit être installé et utilisé à une distance minimale de 20 cm entre le radiateur
et votre corps. Cet émetteur ne doit pas être situé ou opérant en conjonction avec une autre antenne ou
émetteur.
Pour les conditions d'exploitation mobiles> 30 cm à l'organisme, l'CCT900 a été conçu pour fonctionner
avec des antennes de groupe de plus de 12 dBi de gain ou Yagi antennes jusqu'à 9 dBi. types d'antennes ne figurent pas dans cette liste, ou ayant un gain supérieur au gain maximum indiqué pour ce
type, sont strictement interdits pour une utilisation avec cet appareil.
“Cet équipement est conforme aux limites d'exposition aux radiations dans un environnement non contrô-
lé. Cet équipement doit être installé et utilisé à distance minimum de 30cm entre le radiateur et votre
corps. Cet émetteur ne doit pas être co-localisées ou opérant en conjonction avec tout autre antenne ou
transmetteur
See Section 3.9 of this manual for additional regulatory notices and labeling requirements.
Page 5
Page 4 of 90
CCT900
Table of Contents
1.0 Introduction ...................................................................................................................................... 5
1.1 Why Spread Spectrum?................................................................................................................ 5
1.2 Frequency Hopping versus Direct Sequence ............................................................................... 6
2.0 CCT900 Radio Operation.................................................................................................................7
2.1 Network Synchronization and Registration................................................................................... 7
2.2 Authentication ............................................................................................................................... 8
2.3 Serial Port Modes ......................................................................................................................... 8
2.4 SPI Port Modes............................................................................................................................. 9
2.5 RF Data Communications............................................................................................................. 9
2.6 RF Transmission Error Control ................................................................................................... 10
2.7 Transmitter Power Management ................................................................................................ 10
2.8 Network Configurations .............................................................................................................. 10
2.8.1 Point-to-Point Network Operation............................................................................................ 10
2.8.2 Point-to-Multipoint Network Operation .................................................................................... 11
2.8.3 Multipoint Peer-to-Peer Network Operation ............................................................................ 11
2.8.4 Tree Routing System Operation .................................................................................................12
2.9 Full-Duplex Serial Data Communications................................................................................... 12
2.10 Channel Access....................................................................................................................... 12
2.10.1 Polling Mode............................................................................................................................ 13
2.10.2 CSMA Mode ............................................................................................................................ 13
2.10.3 TDMA Modes........................................................................................................................... 14
2.11 Transmission Configuration Planning......................................................................................... 15
2.11.1 TDMA Throughput................................................................................................................... 15
2.11.2 Polling Throughput ..................................................................................................................16
2.11.3 CSMA Throughput...................................................................................................................16
2.11.4 Latency.................................................................................................................................... 17
2.11.5 Configuration Validation .......................................................................................................... 18
2.12 Tree-Routing Systems................................................................................................................20
2.12.1 Example Tree-Routing System................................................................................................ 20
2.12.2 Tree-Routing System Networks............................................................................................... 22
2.12.3 Tree-Routing System Addressing ........................................................................................... 22
2.12.4 Tree-Routing System Implementation Options ....................................................................... 23
2.13 Serial Port Operation .................................................................................................................. 25
2.14 SPI Port Operation...................................................................................................................... 26
2.15 Sleep Modes............................................................................................................................... 29
2.16 Encryption................................................................................................................................... 31
2.17 Synchronizing Co-located Bases................................................................................................ 31
3.0 CCT900 Hardware ......................................................................................................................... 33
3.1 Specifications.............................................................................................................................. 34
3.2 Module Interface ......................................................................................................................... 35
3.3 CCT900 Antenna Connector ...................................................................................................... 36
3.4 Input Voltages............................................................................................................................. 37
3.5 ESD and Transient Protection ....................................................................................................37
3.6 Interfacing to 5 V Logic Systems ................................................................................................ 37
3.7 Power-On Reset Requirements..................................................................................................38
3.8 Mounting and Enclosures ...........................................................................................................38
3.9 Labeling and Notices ..................................................................................................................38
Page 6
Page 5 of 90
CCT900
4.0 Protocol Messages......................................................................................................................... 40
4.1 Protocol Message Formats......................................................................................................... 40
4.1.1 Message Types ....................................................................................................................... 40
4.1.2 Message Format Details.......................................................................................................... 41
4.1.3 /CFG Select Pin.......................................................................................................................43
4.1.4 Flow Control............................................................................................................................. 43
4.1.5 Protocol Mode Data Message Example.................................................................................. 43
4.1.6 Protocol Mode Tree-Routing MAC Address Discovery Example............................................43
4.2 Configuration Registers ..............................................................................................................44
4.2.1 Bank 0 - Transceiver Setup.....................................................................................................44
4.2.2 Bank 1 - System Settings ........................................................................................................47
4.2.3 Bank 2 - Status Registers........................................................................................................ 50
4.2.4 Bank 3 - Serial and SPI Settings............................................................................................. 52
4.2.5 Bank 4 - Host Protocol Settings............................................................................................... 55
4.2.6 Bank 5 - I/O Peripheral Registers............................................................................................ 56
4.2.7 Bank 6 - I/O Setup ................................................................................................................... 57
4.2.8 Bank 7 - Authentication List..................................................................................................... 59
4.2.9 Bank 8 - Tree-Routing Active Router ID Table........................................................................ 59
4.2.10 Bank 9 - Registered MAC Addresses...................................................................................... 59
4.2.11 Bank FF - Special Functions ...................................................................................................60
4.2.12 Protocol Mode Configuration Example.................................................................................... 61
4.2.13 Protocol Mode Sensor Message Example .............................................................................. 61
4.2.14 Protocol Mode Event Message Example ................................................................................61
5.0 CCT900DK Developer’s Kit ........................................................................................................... 62
5.1 CCT900DK Kit Contents............................................................................................................. 62
5.2 Additional Items Needed............................................................................................................. 62
5.3 Developer’s Kit Operational Notes.............................................................................................. 62
5.4 Developer’s Kit Default Operating Configuration........................................................................63
5.5 Developer’s Kit Hardware Assembly .......................................................................................... 63
5.6 DNT Demo Utility Program ......................................................................................................... 65
5.6.1 Initial Kit Operation .................................................................................................................. 66
5.6.2 Serial Communication and Radio Configuration ..................................................................... 67
5.7 DNT Wizard Utility Program........................................................................................................ 75
5.8 CCT900 Interface Board Features.............................................................................................. 83
6.0 Demonstration Procedure .............................................................................................................. 85
7.0 Troubleshooting ............................................................................................................................. 86
7.1 Diagnostic Port Commands ........................................................................................................ 86
8.0 Appendices .................................................................................................................................... 89
8.1 Ordering Information................................................................................................................... 89
8.2 Technical Support....................................................................................................................... 89
9.0 Warranty......................................................................................................................................... 90
Page 7
Page 6 of 90
CCT900
1.0 Introduction
The CCT900 series transceivers provide highly reliable wireless connectivity for point-to-point, point-tomultipoint, peer-to-peer or tree-routing applications. Frequency hopping spread spectrum (FHSS) technology ensures maximum resistance to multipath fading and robustness in the presence of interfering
signals, while operation in the 900 MHz ISM band allows license-free use world wide. The CCT900 supports all standard serial data rates for host communications from 1.2 to 460.8 kb/s plus SPI data rates
from 6.35 to 80.64 kb/s. On-board data buffering and an error correcting radio protocol provide smooth
data flow and simplify the task of integration with existing applications. Key CCT900 features include:
Multipath fading resistant frequency hop-
ping technology with up to 14 frequency
channels per subband
Dynamic TDMA slot assignment that maxim-
izes throughput and CSMA modes that maximizes network size
Support for point-to-point, point-to-
multipoint, peer-to-peer and tree-routing
networks
AES encryption provides protection from
eavesdropping
FCC 15.247, and IC certified for license-free
operation
Nonvolatile memory stores CCT900 configu-
ration when powered off
10 mile plus range with omni-directional
antennas (antenna height dependent)
Selectable 10, 63 and190(rms)/250(pk) mW
transmit power levels
Transparent ARQ protocol with data
buffering ensures data integrity
Simple interface handles both data and
control at up to 460.8 kb/s on the serial port
or 80.64 kb/s on the SPI port
Analog and digital I/O simplifies wireless
sensing
Auto-reporting I/O mode simplifies applica-
tion development
1.1 Why Spread Spectrum?
A radio channel can be very hostile, corrupted by noise, path loss and interfering transmissions from
other radios. Even in an interference-free environment, radio performance faces serious degradation from
a phenomenon known as multipath fading. Multipath fading results when two or more reflected rays of the
transmitted signal arrive at the receiving antenna with opposing phases, thereby partially or completely
canceling the signal. This problem is particularly prevalent in indoor installations. In the frequency domain, a multipath fade can be described as a frequency-selective notch that shifts in location and intensity
over time as reflections change due to motion of the radio or objects within its range. At any given time,
multipath fades will typically occupy 1% - 2% of the band. From a probabilistic viewpoint, a conventional
radio system faces a 1% - 2% chance of signal impairment at any given time due to multipath fading.
Spread spectrum reduces the vulnerability of a radio system to both multipath fading and jammers by
distributing the transmitted signal over a larger frequency band than would otherwise be necessary to
send the information. This allows a signal to be reconstructed even though part of it may be lost or corrupted in transmission.
Page 8

Page 7 of 90
CCT900
Narrow-band versus spread-spectrum transmission
Figure 1.1.1
1.2 Frequency Hopping versus Direct Sequence
The two primary approaches to spread spectrum are direct sequence spread spectrum (DSSS) and
frequency hopping spread spectrum (FHSS), either of which can generally be adapted to a given application. Direct sequence spread spectrum is produced by multiplying the transmitted data stream by a much
faster, noise-like repeating pattern. The ratio by which this modulating pattern exceeds the bit rate of the
base-band data is called the processing gain, and is equal to the amount of rejection the system affords
against narrow-band interference from multipath and jammers. Transmitting the data signal as usual, but
varying the carrier frequency rapidly according to a pseudo-random pattern over a broad range of channels produces a frequency hopping spread spectrum system.
Forms of spread spectrum - direct sequence and frequency hopping
Figure 1.1.2
Page 9
Page 8 of 90
CCT900
One disadvantage of direct sequence systems is that due to design issues related to broadband transmitters and receivers, they generally employ only a minimal amount of spreading, often no more than the
minimum required by the regulating agencies. For this reason, the ability of DSSS systems to overcome
fading and in-band jammers is relatively weak. By contrast, FHSS systems are capable of hopping
throughout the entire band, statistically reducing the chances that a transmission will be affected by
fading or interference. This means that a FHSS system will degrade gracefully as the band gets noisier,
while a DSSS system may exhibit uneven coverage or work well until a certain point and then give out
completely.
Because it offers greater immunity to interfering signals, FHSS is often the preferred choice for co-located
systems. Since direct sequence signals are very wide, they can offer only a few non-overlapping channels, whereas multiple hoppers can interleave, minimizing interference. Frequency hopping systems do
carry some disadvantages, in that they requires an initial acquisition period during which the receiver
must lock onto the moving carrier of the transmitter before any data can be sent, which typically takes
several seconds. In summary, frequency hopping systems generally feature greater coverage and channel utilization than comparable direct sequence systems. Of course, other implementation factors such as
size, cost, power consumption and ease of implementation must also be considered before a final radio
design choice can be made.
2.0 CCT900 Radio Operation
2.1 Network Synchronization and Registration
As discussed above, frequency hopping spread spectrum radios such as the CCT900 periodically change
their transmit frequency. In order for the other radios in the network to receive the transmission, they must
be listening to the frequency on which the current transmission is being sent. To do this, all the radios in
the network must be synchronized to the same hopping pattern.
In all CCT900 networks, one radio is designated as the base. All other radios are designated as remotes
or routers. The base transmits a beacon each time it hops to a different frequency, which allows the other
radios in its network to synchronize with it. Since all radios in the network know the hopping pattern, once
they are synchronized with the base, they know which frequency to hop to and when.
When a remote or router is powered on, it rapidly scans the frequency band for the synchronizing signal.
Since the base is transmitting on up to 14 frequencies and the remotes and routers are scanning up to 37
frequencies, it can take several seconds to synchronize with the base.
Once a radio has synchronized with the base, it will request registration information to allow it to join the
network. Registration is handled automatically by the base. When a radio is registered, it receives several
network parameters from the base, including HopDuration, InitialNwkID, FrequencyBand and Nwk_Key
(see Section 4.2 for parameter details). Note that if a registration parameter is changed at the base, it will
update the parameter in the remotes or routers over the air.
When leasing is enabled, registration also allows the base to track radios entering and leaving a network,
up to a limit of 126. The base builds a table of serial numbers of registered radios using their three-byte
MAC addresses. To detect if a radio has gone offline or out of range, a registration is leased and must be
renewed within the configured lease interval. CCT900 radios automatically send lease renewal request to
the base. There is nothing a remote host needs to do to keep the lease renewed. Note that more than
126 radios can join a network, but base-managed leasing cannot be used. In this case, the base can be
Page 10
Page 9 of 90
CCT900
configured to send join announcements to a host application for an unlimited number of radios. The
application can then verify the continued presence of each radio in the network through periodic polling.
The CCT900 also supports a RemoteLeave command that allows a host application to release a radio
from the network. This is useful to remove any rogue radios that may have joined then network when
authentication is not being used. It is also useful to remove remotes from the network once they have
been serviced by the application. The RemoteLeave command includes the amount of time the radio
must leave the network, which can be set from 2 seconds to more than 36 hours. In addition, a radio can
be told to leave and not rejoin until it has been power-cycled or reset. The base can use RemoteLeave to
keep track of remotes that have not yet been serviced, allowing networks of more than 126 remotes to be
indirectly tracked by the base.
2.2 Authentication
In many applications it is desirable to control which radios can join a network. This provides security from
rogue radios joining the network and simplifies network segregation for co-located networks. Registration
is controlled by the AuthMode parameter in the base. The AuthMode parameter can be set to one of four
values, 0..3. The default value is 0, which allows any remote or router to register with a base.
When the AuthMode parameter is set to 1, a radio’s address must be listed in Parameter Bank 7 before it
will be allowed to register with the base. This is referred to as base authentication. Bank 7 must be preloaded with the addresses of the authorized remotes before using base authentication. If a radio whose
MAC address is not in Bank 7 attempts to join the network the base will deny the registration request. A
maximum of 16 remotes can be entered into Bank 7. To support larger networks, mode 2 must be used.
When the AuthMode parameter is set to 2, the address of a radio attempting to register with the base is
sent to the host for authentication in a JoinRequest message. The host application determines if the radio
should be allowed to register and returns a JoinReply message to the base containing a PermitStatus
parameter that allows or blocks the radio from registering. The host application has 30 seconds in which
to respond, after which time the base denies registration to the radio. Up to 16 join requests can be
pending at any one time. If more than 16 radios are asking to join, the first 16 will be serviced and additional radios will be serviced after the earlier requests are handled. The RegDenialDelay parameter
controls how often a radio will request registration after it has been denied. If it is anticipated that more
than 16 radios will request registration before the application can service the first 16, this parameter
should be set to the time it will take the application to service four requests, as this will speed the authentication process by freeing the base from issuing multiple denials to the same remotes.
When the AuthMode parameter is set to 3, authentication is locked to the addresses of the radios currently registered with the base. Mode 3 is typically used in conjunction with Mode 0 during a commissioning
process. AuthMode is set to 0, radios are turned on and allowed to register with the base, and AuthMode
is then switched to 3 to lock the network membership.
2.3 Serial Port Modes
CCT900 radios can work in two data modes on the primary serial (UART) port: transparent and packet
protocol. Transparent mode formatting is simply the raw user data. Protocol mode formatting includes a
start-of-packet framing character, length byte, addressing, command bytes, etc. Transparent mode operation is especially useful in point-to-point systems that act as simple cable replacements. In point-tomultipoint, peer-to-peer and tree-routing systems where the base needs to send data specifically to each
Page 11
Page 10 of 90
CCT900
radio, protocol formatting must be used unless the data being sent includes addressing information that
the devices connected to the remotes/routers can use to determine the intended destination of the broadcast data. Protocol formatting is also required for configuration commands and responses, and sensor I/O
commands and responses. Protocol mode can be used at the base while transparent mode is used at the
remotes. The one caution about protocol mode: the length of a protocol mode message cannot exceed
the BaseSlotSize or RemoteSlotSize or the packet will be discarded. Protocol formatting details are
covered in Section 4.
The CCT900 provides two ways to switch between transparent and protocol modes. To enter protocol
mode, the /CFG input Pin 18 can be switched from logic high to low, or the EnterProtocolMode command
can be sent. When input Pin 18 is switched from logic low to high, or an ExitProtocolMode command is
sent to the primary serial input, the CCT900 will switch to transparent operation. Note that it is possible
that part of the EnterProtocolMode command will be sent over the air as transparent data.
When operating in transparent mode, two configuration parameters control when a CCT900 radio will
send the data in its transmit buffer. The MinPacketLength parameter sets the minimum number of bytes
that must be present in the transmit buffer to trigger a transmission. The TxTimeout parameter sets the
maximum time data in the transmit buffer will be held before transmitting it, even if the number of data
bytes is less than MinPacketLength. The default value for MinPacketLength parameter is one and the
TxTimeout parameter is zero, so that any bytes that arrive in the CCT900 transmit buffer will be sent on
the next hop. As discussed in Section 2.8.2, it is useful to set these parameters to values greater than
their defaults in point-to-multipoint systems where some or all the remotes are in transparent mode.
2.4 SPI Port Modes
CCT900 radios can be configured to transmit and receive data through the serial peripheral interface
(SPI) port instead of the primary serial (UART) port. A CCT900 can operate as either an SPI Master or
Slave. Messages routed through the SPI port must be protocol formatted, as described in Section 4.
When a CCT900 is acting as an SPI Slave, all messages are routed through the SPI port. When a
CCT900 is acting as an SPI Master, only data messages are routed through the SPI port; radio configuration commands and responses are routed through the primary serial (UART) port. A radio configured as
an SPI Master can use a command stored in the SPI_MasterCmdStr parameter to interrogate a Slave
peripheral for data to transmit to the base. This is especially useful where periodic I/O reporting is enabled on the remote. Alternately, the base can send an interrogation command to the radio to fetch peripheral data. SPI operation is configured with the SPI_Mode parameter.
2.5 RF Data Communications
At the beginning of each hop the base transmits a beacon, which always includes a synchronizing signal.
After synchronization is sent, the base will transmit any user data in its transmit buffer, unless in transparent mode the MinPacketLength and/or TxTimeout parameters have been set above their default values.
The maximum amount of user data bytes that the base can transmit per hop is limited by the BaseSlot-
Size parameter, as discussed in Section 2.8.1. If there is no user data or reception acknowledgements
(ACKs) to be sent on a hop, the base will only transmit the synchronization signal in the beacon.
The operation for remotes and routers is similar to the base, but without a synchronizing signal. The
RemoteSlotSize parameter indicates the maximum number of user data bytes a remote or router can
transmit on one hop and is a read-only value. The RemoteSlotSize is determined by the HopDuration and
Page 12
Page 11 of 90
CCT900
BaseSlotSize parameters and the number of registered radios. The MinPacketLength and TxTimeout
parameters operate in a remote in the same manner as in the base.
2.6 RF Transmission Error Control
The CCT900 supports two error control modes: automatic transmission repeats (ARQ), and redundant
transmissions for broadcast packets. In both modes, the radio will detect and discard any duplicates of
messages it receives so that the host application will only receive one copy of a given message. In the
redundant transmission mode, broadcast packets are repeated a fixed number of times based on the
value of the ARQ_AttemptLimit parameter. In ARQ mode, a packet is sent and an acknowledgement is
expected on the next hop. If an acknowledgement is not received, the packet is transmitted again on the
next available hop until either an ACK is received or the maximum number of attempts is exhausted. If the
ARQ_AttemptLimit parameter is set to its maximum value, a packet transmission will be retried without
limit until the packet is acknowledged. This is useful in some point-to-point cable replacement applications
where it is important that data truly be 100% error-free, even if the destination remote goes out of range
temporarily.
2.7 Transmitter Power Management
The CCT900 includes provisions for setting the base transmit power level and the remote maximum
transmit power level with the TxPower parameter. CCT900 networks covering a small area can be adjusted to run at lower transmitter power levels, reducing potential interference to other nearby systems.
Radios that are located close to their base can be adjusted to run at lower maximum power, further
reducing potential interference. Base units transmit at the fixed power level set by the TxPower parameter. Remotes and routers automatically adjust their transmitter power to deliver packets to the base at an
adequate but not excessive signal level, while not transmitting more power than set by their TxPower
parameter. Remotes and routers make transmitter power adjustments using the strength of the signals
received from the base and the base transmitter power setting, which is periodically transmitted by the
base. The automatic transmit power adjustment is enabled by default, but can be disabled if so desired.
Refer to Section 4.2.1 for details.
2.8 Network Configurations
The CCT900 supports four network configurations: point-to-point, point-to-multipoint, peer-to-peer and
tree-routing. In a point-to-point network, one radio is set up as the base and the other radio is set up as a
remote. In a point-to-multipoint network, a star topology is used with the radio set up as a base acting as
the central communications point and all other radios in the network set up as remotes. In this configuration, each communication takes place between the base and one of the remotes. Peer-to-peer communications between remotes using the base as a relay is also supported, as discussed in Section 2.8.3.
Tree-routing networks can retransmit messages through one or more routers, greatly expanding the area
that can be covered by a single CCT900 system, as discussed in Section 2.8.4.
2.8.1 Point-to-Point Network Operation
Most point-to-point networks act as serial cable replacements and both the base and the remote use
transparent mode. Unless the MinPacketLength and TxTimeout parameters have been set above their
default values, the base will send the data in its transmit buffer on each hop, up to a limit controlled by the
BaseSlotSize parameter. In transparent mode, if the base is buffering more data than can be sent on one
hop, the remaining data will be sent on subsequent hops. The base adds the address of the remote, a
Page 13

Page 12 of 90
CCT900
packet sequence number and error checking bytes to the data when it is transmitted. These additional
bytes are not output at the remote in transparent mode. The sequence number is used in acknowledging
successful transmissions and in retransmitting corrupted transmissions. A two-byte CRC and a one-byte
checksum allow a received transmission to be checked for errors. When a transmission is received by the
remote, it will be acknowledged if it checks error free. If no acknowledgment is received, the base will
retransmit the same data on the next hop. Note that acknowledgements from remotes are suppressed on
broadcast packets from the base.
In point-to-point operation, by default a remote will send the data in its transmit buffer on each hop, up to
the limit controlled by its RemoteSlotSize parameter. If desired, the MinPacketLength and TxTimeout
parameters can be set above their default values, which configures the remote to wait until the specified
amount of data is available or the specified delay has expired before transmitting. In transparent mode, if
the remote is buffering more data than can be sent on one hop, it will send the remaining data in subsequent hops. The remote adds its own address, a packet sequence number and error checking bytes to
the data when it is transmitted. These additional bytes are not output at the base if the base is in transparent mode. When a transmission is received by the base, it will be acknowledged if it checks error free.
If no acknowledgment is received, the remote will retransmit the same data on the next hop.
2.8.2 Point-to-Multipoint Network Operation
In a point-to-multipoint network, the base is usually configured for protocol formatting, unless the applications running on each remote can determine the data’s destination from the data itself. Protocol formatting
adds addressing and other overhead bytes to the user data. If the addressed remote is using transparent
formatting, the source (originator) address and the other overhead bytes are removed. If the remote is
using protocol formatting, the source address and the other overhead bytes are output with the user data.
A remote can operate in a point-to-multipoint network using either transparent or protocol formatting, as
the base is the destination by default. In transparent operation, a remote CCT900 automatically adds
addressing, a packet sequence number and error checking bytes as in a point-to-point network. When the
base receives the transmission, it will format the data to its host according to its formatting configuration.
A remote running in transparent mode in a point-to-multipoint network can have the MinPacketLength and
TxTimeout parameters set to their default values to reduce latency, or above their default values to reduce the volume of small packet transmissions.
2.8.3 Multipoint Peer-to-Peer Network Operation
After a remote has joined a point-to-multipoint network, it can communicate with another remote through
peer-to-peer messaging, where the base acts as an automatic message relay. In protocol mode, if a
remote specifies a destination address other than the base address, peer-to-peer messaging is enabled.
In transparent mode, the RmtTransDestAddr parameter sets the destination address. Changing Rmt-
TransDestAddr from the default base address to the address of another remote enables peer-to-peer
messaging. The broadcast address can also be used as a peer-to-peer destination address. In this case,
the message will be unicast from the remote to the base (using ARQ) and then broadcast by the base (no
ARQ). For peer-to-peer broadcasts, no acknowledgement is sent and no TxDataReply packet is reported
to the host.
Page 14
Page 13 of 90
CCT900
2.8.4 Tree-Routing Operation
A CCT900 tree-routing system consists of a base, remotes and up to 63 routers. A router is basically a
remote that has been configured with two operating modes - a base mode for its “child” radios and a
remote mode for its “parent” router or the system base. This allows a router to do tree-routing in addition
to normal remote functions. Each router can forward messages to/from a total of 126 child radios. A
CCT900 tree-routing system can cover a much larger area than other CCT900 networks, with the tradeoff that tree-routing increases message transmission latency. Tree-routing systems are well suited to
many industrial, commercial and agricultural data acquisition applications. Tree-routing operation is
supported by CSMA (mode 1) channel access. See Section 2.12 below.
2.9 Full-Duplex Serial Data Communications
From a host application’s perspective, CCT900 serial communications appear full duplex. Both the base
host application and each remote/router host application can send and receive serial data at the same
time. At the radio level, the radios do not actually transmit at the same time. If they did, the transmissions
would collide. As discussed earlier, the base transmits a synchronization beacon at the beginning of each
hop, followed by its user data. After the base transmission, the remotes/routers can transmit. Each transmission may contain all or part of a complete message from its host application. From an application’s
perspective, the radios are communicating in full duplex since the base can receive data from a remote/router before it completes the transmission of a message to the remote/router and visa versa.
2.10 Channel Access
The CCT900 provides three methods of channel access: Polling, CSMA and TDMA, as shown in the
table and figure below. The channel access setting is distributed to all radios by the base, so changing it
at the base sets the entire network or system. Polling refers to an application sending a command from
the base to one or more remote devices and receiving a response from only one remote device at a time.
Polling is suitable for both large and small networks where periodic or event reporting by remotes is not
required. Carrier Sense Multiple Access (CSMA) is very effective at handling packets with varying
amounts of data and/or packets sent at random times from a large number of remotes. Time Division
Multiple Access (TDMA) provides a scheduled time slot for each remote to transmit on each hop. The
default CCT900 access mode is TDMA dynamic mode.
Access Mode
Description
Max Number of Remotes
0
Polling
unlimited
1
CSMA
unlimited
2
TDMA dynamic slots
up to 16
3
TDMA fixed slots
up to 16
4
TDMA with PTT
up to 16
Table 2.10.1
Page 15

Page 14 of 90
CCT900
Figure 2.10.1
2.10.1 Polling Mode
Polling channel access is used for point-to-point and point-to-multipoint systems where only one remote
will attempt to transmit data at a time, usually in response to a command from the base.
Polling (mode 0) is a special case of CSMA mode 1. The user can set the BaseSlotSize and CSMA_
RemtSlotSize parameters when using this mode. Since only one remote will attempt to transmit at a time,
to minimize latency, the CSMA_Predelay and CSMA_Backoff parameters are not used. Lease renewals
are also not used, again to minimize latency. Thus, when the base is operated in protocol mode with
Announce messages enabled, only join messages are generated. This mode provides high throughput as
there is no contention between remotes and the entire portion of the hop frame following the base transmission is available for a remote to transmit. Applications where more than one remote may attempt to
transmit at a time, where event and/or periodic I/O reporting are enabled, and/or tree-routing operation is
required should not use this mode.
2.10.2 CSMA Mode
When using CSMA channel access, each remote/router with data to send listens to see if the channel is
clear and then transmits. If the channel is not clear, a radio will wait a random period of time and listen
again. CSMA works best when a large or variable number of radios transmit infrequent bursts of data.
There is no absolute upper limit on the number of radios that can be supported in this mode - it depends
on message density. A maximum of 126 radios can be supported if base-managed join/leave tracking is
required, or an unlimited number of remotes if base join-leave tracking is not required or will be handled
by the host application.
There are two important parameters related to CSMA operation. The CSMA_Backoff parameter defines
the initial time that a radio will wait when it determines the channel is busy before again checking to see if
the channel is clear (back-off interval). If, after finding the channel busy and backing off, the radio finds
Page 16
Page 15 of 90
CCT900
the channel busy a second time, the amount of time the radio will wait before checking the channel will
increase. It will continue to increase each subsequent time the channel is busy until the channel is finally
found idle. This is the classic CSMA technique that handles the situation where a number of radios hold
data to send at the same time. The CSMA_ Predelay parameter controls the maximum time that a radio
will wait before first listening to see if the channel is clear for a transmission. This parameter is used to
make sure that all the remotes do not transmit immediately after the base finishes transmitting.
CSMA (mode 1) provides classical CSMA channel access, and gives the user control over both the
CSMA_Predelay and CSMA_Backoff parameters. This mode is well suited for large numbers of uncoordinated radios, where periodic/event reporting is used, or tree-routing operation is required. In addition to
CSMA_ Predelay and CSMA_ MaxBackoff, the user can set the BaseSlotSize and CSMA_ RemtSlotSize
parameters when using this mode. The following guidelines are suggested for setting CSMA_Predelay:
For lightly loaded CSMA contention networks, decrease CSMA_Predelay
to 0x03 or less to reduce latency.
For heavily loaded CSMA contention networks, increase CSMA_Predelay
to 0x05 or more for better throughput.
As an option, CSMA mode allows the base to directly track remotes entering and leaving the network, for
up to 126 remotes. The base is operated in protocol mode and is configured to send Announce messages
to its host when a remote joins, and when the remote’s registration lease expires.
While a base in a CSMA network can track a maximum of 126 remotes entering and leaving the network,
it can generate join Announce messages for an unlimited number of remotes. This allows the host application to track remotes entering and leaving a CSMA network with more than 126 remotes by creating its
own table of MAC addresses and periodically sending a GetRemoteRegister command to each remote in
the table. Failure to answer a GetRemoteRegister command indicates the remote is no longer active in
the network.
CSMA modes work well in many applications, but CSMA has some limitations, as summarized below:
Bandwidth is not guaranteed to any remote.
Marginal RF links to some remotes can create a relatively high chance of
collisions in heavily loaded networks.
2.10.3 TDMA Modes
TDMA modes provide guaranteed bandwidth to some or all of the radios in a network. Radios that register with the base receive several special parameters, including ranging information and a specific channel
access time slot assignment. TDMA registrations are always leased and must be renewed every 250
hops. The CCT900 provides three TDMA access modes, as discussed below.
TDMA Dynamic Slots (mode 2) is used for general-purpose TDMA applications where scaling the capacity per slot to the number of active remotes is automatic. Each radio that registers with the base receives
an equal time slice. As new remotes join, the size of the TDMA remote slots shrinks accordingly. The
number of slots, individual slot start times, and the RemoteSlotSize are computed automatically by the
CCT900 network in this mode. The user should note that the bandwidth to each remote will change
Page 17
Page 16 of 90
CCT900
immediately as remotes join or leave the network. When running in protocol mode on a remote, care must
be taken not to generate messages too long to be sent in a single hop due to automatic RemoteSlotSize
reduction.
TDMA Fixed Slots (mode 3) is used for applications that have fixed data throughput requirements, such
as isochronous voice or streaming telemetry. The slot start time and the RemoteSlotSize are computed
automatically by the CCT900 network in this mode. The user must set the number of slots using the
MaxSlots parameter. The base radio will allocate remote slot sizes as if MaxSlots number of radios are
linked with the base, even when fewer remotes/routers are actually linked. In this mode, the remote slot
sizes are constant.
TDMA with PTT (mode 4) supports remotes with a "push-to-talk" feature, also referred to as "listenmostly" remotes. This mode uses fixed slot allocations. Remotes can be registered for all but the last slot.
The last slot is reserved for the group of remotes that are usually listening, but occasionally need to
transmit. In essence, the last slot is a shared channel for this group of remotes. When one of them has
data to send it keys its transmitter much like a walkie-talkie, hence the name push-to-talk (PTT). There is
no limit to the number of remotes that can listen to the last slot.
The slot start time and the RemoteSlotSize are computed automatically by the CCT900 network in mode
4. The user must specify the number of slots using the MaxSlots parameter. The last slot is reserved for
the PTT remotes. The user must configure PTT remotes individually to select mode 4 operation. The
user's application must ensure that only one PTT remote at a time is using the slot. Mode 4 does not
support tree-routing operation.
2.11 Transmission Configuration Planning
Because frequency hopping radios change frequency periodically, a single message may be sent in one
or more RF transmissions. The length of time the radio stays on a frequency, the hop duration, impacts
both latency and throughput. The longer the radio stays on a single frequency, the higher the throughput
since the radio is transmitting for a higher percentage of the time, but latency is also higher since radios
may have to wait longer to transmit. So latency and throughput trade off against one another. The
CCT900 has several configuration parameters that allow latency and throughput to be optimally balanced
to the needs of an application.
2.11.1 TDMA Throughput
For TDMA channel access without routers, throughput and latency are controlled by the RF data rate, the
serial port baud rate, the BaseSlotSize, the HopDuration, and the number of remotes. A wide range of
throughput and latency combinations can be obtained by adjusting these parameters. The throughput of a
radio in a TDMA network is simply:
Number of bytes per hop/Hop Duration
For the base, the number of byes per hop is controlled by the BaseSlotSize parameter so the throughput
of the base radio is:
BaseSlotSize/HopDuration
Note that if fewer bytes than the BaseSlotSize limit are sent to the base radio by its host during the hop
duration time in transparent mode, the observed throughput of the base radio will be reduced. If the base
is in protocol mode, it will wait until a protocol formatted message is completely received from its host
Page 18
Page 17 of 90
CCT900
before transmitting it. If the message is not completely received by the time the base transmits, the base
will wait until the next hop to transmit the message. The throughput for each remote is:
RemoteSlotSize/HopDuration
In a TDMA mode, the RemoteSlotSize is set automatically based on the number of remotes and the
BaseSlotSize. Note that the base radio always reserves BaseSlotSize amount of time in each hop wheth-
er or not the base has user data to send.
To help select appropriate parameter values, MURATA provides the DNT Throughput Calculator utility
program (DNTCalc.exe). This program is on the development kit CD. Enabling encryption (security) adds
additional bytes to the data to be sent but the Calculator has a mode to take this into account.
2.11.2 Polling Throughput
In polling mode, the application sends data from the base to a specific remote, which causes the remote
and/or its host to send data back to the application. The network operates like a point-to-point network in
this case. In polling, the HopDuration should be set just long enough to accommodate a base transmission up to the limit allowed by the BaseSlotSize parameter, plus one remote transmission up to the limit
allowed by the CSMA_RemtSlotSize parameter. These slot sizes and the hop duration set the polling
throughput as in TDMA channel access.
The throughput in Polling mode is also determined by the amount of time it takes for the remote host
device to respond to the poll. For example, consider the situation where a remote host device communicates with the CCT900 at 38.4 kb/s, receives a 16-byte poll command, and takes 1 ms to generate a 32byte response which it then sends to the CCT900. Sixteen bytes over a UART port is 160 bits using 8,N,1
serial parameters. Sending 160 bits at 38.4 kb/s takes 4.2 ms. Add 1 ms for the host device to process
the command and begin sending the 32-byte response. The 32-byte response takes 8.4 ms to send at
38.4 kb/s, for a total turnaround time of 13.6 ms. This amount of time could be added to the base and
remote slot times to allow the entire transaction to take place in a single hop. However, except at the 38.4
kb/s over-the-air data rate, this is likely to be much longer than the base and remote slot times. Thus, in
practice, lengthening the hop duration to complete the transaction in a single hop doesn’t really affect the
throughput. Nevertheless, it is important to note that the throughput for the remote in the example above
is substantially less than the remote slot size in bytes divided by the hop duration.
It is not a CCT900 requirement that the complete application message be sent in a single hop, nor that
the remote response is returned in a single hop, when in transparent mode. If either transmission occurs
over more than one hop, then depending on the length of the data, the RF data rate and the serial port
data rate at the receiving end, there may be a gap in the serial data. Some protocols, such as Modbus
RTU, use gaps in data to determine packet boundaries.
2.11.3 CSMA Throughput
In CSMA mode, remote radios do not have a fixed throughput, which is why applications requiring guaranteed throughput should use polling or a TDMA mode. The reason that the throughput of a CSMA
remote is not fixed is because its ability to transmit at any given time depends on whether another radio is
already transmitting. The throughput of a remote is further affected by how many other remotes are
waiting for the channel to become clear so they can transmit. This is not a problem when remotes, even a
large numbers of remotes, only send data infrequently. The CCT900 includes several configuration parameters that can be used to optimize the performance of a CSMA network.
Page 19
Page 18 of 90
CCT900
It is often desirable to limit the amount of data a CSMA remote can send in one transmission. This prevents one remote from hogging network throughput. To accommodate this, the CCT900 provides a
CSMA_RemtSlotSize parameter that is user configurable. When a remote has transmitted CSMA_
RemtSlotSize bytes on a given hop, it will stop transmitting until the next hop. Note that this remote will
have to contend for the channel on the next hop, so it is not guaranteed that it will be the first remote to
transmit on the next hop or that it will be able to transmit on the next hop at all. To allow multiple remotes
a chance to transmit on the same hop, the HopDuration parameter must be set long enough to support
the BaseSlotSize, plus the number of remotes to transmit per hop multiplied by the CSMA_ RemtSlotSize,
plus the number of remotes to transmit per hop multiplied by the CSMA_Backoff. Because of the way
CSMA channel access works, this does not guarantee that the desired number of remotes to transmit on
a hop will always be able to transmit on a single hop. This is due to the fact that when a remote with data
to send finds the channel busy a second time, it waits for a longer period to time before testing the channel again. This time will continue to increase until the remote finds the channel clear. In practice this is
unlikely to present a problem, as CSMA networks are used with devices that infrequently have data to
send.
The DNT Throughput Calculator can be used to determine the HopDuration, but it will be necessary to
increase the number of slots to a value greater than the number of remotes to transmit on a single hop to
account for the backoffs. It is indeterminate how many backoffs may occur during a single hop, which is
why the number of remotes that transmit on a given hop cannot be guaranteed. Note that the CSMA_
Backoff parameter sets the length of time a remote will wait to recheck the channel when it has detected
that the channel is busy. The second time a remote detects that the channel is busy, it will increase the
amount of time it waits until it checks again. Every subsequent time it detects a busy channel it will increase the amount of time it will wait in a geometric fashion. This continues until it detects an idle channel. So while a short CSMA_Backoff can decrease the time between when one remote transmits and the
next remote transmits, it can actually lead to a longer time between remote transmissions than a longer
backoff. This can occur when the remote checks the channel multiple times during the transmitting remote’s transmission causing the back-off time to be increased.
2.11.4 Latency
The worst case latency for TDMA access (without routers), excluding retries, occurs when the radio
receives data just after its turn to transmit. In this instance, it will have to wait the length of time set by the
HopDuration to begin transmitting the data. If the radio is receiving data over its serial port at a rate higher
than its throughput, this will only occur at the beginning of a transmission that spans several hops.
In a polling application, latency is affected by how long the remote and/or its host takes to respond, and
when in the hop data is ready to be transmitted. Since a remote can begin transmitting at practically any
time during the hop after the base has transmitted, the latency can be less than HopDuration. However,
the remote transmission may extend over two hops if it starts late in the first hop.
Latency for any given remote in a CSMA network is particularly difficult to characterize. If many remotes
have data to send, the latency for the last remote to send will be the length of time it takes all the other
remotes to send. The CSMA scheme used in the CCT900 is designed to allow each remote an equal
opportunity to transmit, so the concern is not that one remote is locked out, but just how long it will take a
number of remotes with data to sent to each gain access to the channel and send their data. The more
data that needs to be sent, the more time will be consumed checking the channel and backing off when
the channel is busy. Again, this is why CSMA networks are best used when there are a large number of
nodes that send data infrequently.
Page 20
Page 19 of 90
CCT900
The other factor impacting latency is retries. This impact is not unique to frequency hopping radios but is
common among all wireless technologies. A radio only transmits data once per hop. It needs to wait until
the next hop to see if the transmission was received at the destination. If not, the radio will transmit the
data again and wait for the acknowledgement. This can happen up to ARQAttemptLimit number of times
which is equal to ARQAttemptLimit times HopDuration amount of time.
2.11.5 Configuration Validation
Although slot durations are automatically calculated by the CCT900, the RF data rate, hop duration, etc.,
must be coordinated by the user to assure a valid operating configuration based on the following criteria:
1. Regardless of the RF data rate, the maximum CCT900 hop duration is limited to 200 ms. A
CCT900 network must be configured accordingly.
2. In protocol mode, the BaseSlotSize and RemoteSlotSize parameters must be large enough to
hold all the data bytes in the largest protocol formatted message being used. Protocol formatted
messages must be sent in a single transmission. Any protocol formatted messages too large for
the slot size setting will be discarded
3. In TDMA mode 2, the RemoteSlotSize will be reduced automatically when a new remote joins the
network. This can cause a network to suddenly malfunction if the hop duration is not set to provide an adequately large remote slot allocation when fully loaded with remotes
4. When operating in polling mode 0, the CSMA_RemtSlotSize and HopDuration parameters are
usually set to accommodate the number of data bytes in a maximum size transmission. This configuration provides low latency for polled messages.
5. When operating in CSMA mode 1 with multiple remotes, the CSMA_RemtSlotSize and HopDura-
tion parameters are usually set to accommodate three times the number of data bytes in one
maximum size transmission, to allow time for more than one remote to attempt to transmit during
a single hop.
The DNT Throughput Calculator utility program is shown in Figure 2.11.5.1. Decimal data is entered by
default. Hexadecimal data can also be entered using a 0x prefix, as shown in the Hop Duration Counts
text box. When using the DNT Throughput Calculator, parameter coordination depends on the operating
mode of a CCT900 network, as outlined below:
Polling (mode 0) - the user can set and must coordinate the RF data rate, hop duration, base slot size
and remote slot size. First, set the BaseSlotSize to accommodate the maximum number of data bytes in a
base transmission. Next, set the CSMA_RemtSlotSize to accommodate the maximum number data bytes
in a remote transmission. Use these slot sizes, the RF data rate and the maximum operating range (20
miles is the default) as inputs to the Calculator program to determine minimum valid HopDuration.
CSMA contention (mode 1) - the same procedure as for polling is used, except that the CSMA_
RemtSlotSize typically should be set at three times the maximum number of data bytes for point-tomultipoint networks. The default values for CSMA pre-delay and back-off are assumed.
TDMA dynamic (mode 2) - this is the CCT900’s default operating mode and the default settings are
optimized for point-to-point transparent operation. For other configurations the user must coordinate the
Page 21
Page 20 of 90
CCT900
RF data rate, hop duration, base slot size and maximum number of remotes. Although the remote slot
size and remote slot time allocation are automatically set in mode 2, the user must predetermine these
values to assure a valid operating configuration. First, set the BaseSlotSize to accommodate the maximum number of data bytes in a base transmission. Next, determine the RemoteSlotSize required to
accommodate the maximum number of data bytes in a remote transmission. Use these slot sizes, the
maximum number of remotes that will be used in the network, the RF data rate and the maximum operating range as inputs to the Calculator to determine the minimum valid HopDuration time. Note that when
there are fewer remotes on the network than the maximum specified, the remotes will automatically be
configured with a bigger RemoteSlotSize parameter.
TDMA fixed (mode 3) - First, set the BaseSlotSize to accommodate the maximum number of data bytes in
a transmission. Next, determine the RemoteSlotSize required to accommodate the maximum number of
data bytes in a remote transmission. Then set the number of remote slots. Use the slot sizes, the number
of remotes, the RF data rate and maximum operating range as inputs to the Calculator to determine the
minimum valid hop duration.
TDMA PTT (mode 4) - use the same procedure as for TDMA fixed mode 3.
The CCT900 base firmware can detect a significant number of invalid configurations and override the
HopDuration parameter to establish a valid configuration. To take advantage of this feature, configure a
CCT900 network in the following order:
1. In all system radios, set the RF_DataRate parameter and save it. Then reset all radios to establish the new RF data rate.
2. Set the BaseSlotSize and TDMA_MaxSlots or CSMA_RemtSlotSize as needed. Use the default
maximum operating range unless links of more than 20 miles are planned.
3. Set the HopDuration parameter and then read it back. If the HopDuration parameter readout is
different than the value set, the firmware detected an invalid configuration and is overriding it.
Page 22
Page 21 of 90
CCT900
2.12 Tree-Routing Systems
As discussed in Section 2.8.4, CCT900 tree-routing systems can cover much larger areas than other
CCT900 networks, with the trade-off that tree-routing increases message transmission latency. Treerouting systems are well suited to many industrial, commercial and agricultural applications. Compared to
other CCT900 network configurations, however, tree-routing systems require somewhat more initial
planning and commissioning steps, as discussed in this Section.
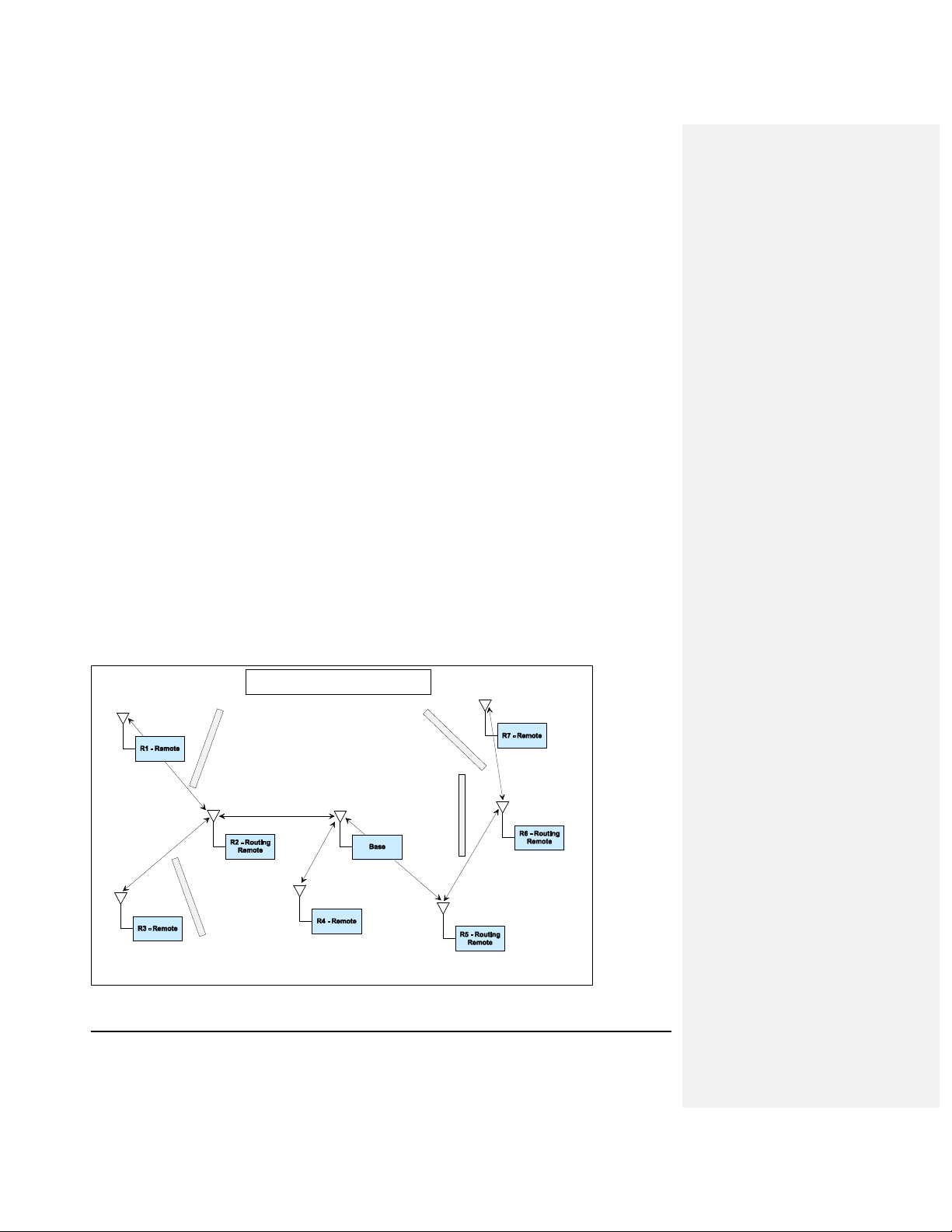
2.12.1 Example Tree-Routing System
An example tree routing system is shown in Figure 2.12.1.1. In this example, seven sensor locations
need to be monitored over a several acre outdoor site. All of the sensor data must be sent back to a
central location, the base radio, for collection and analysis. Due to obstructions, remotes R1, R3, R6, and
R7 are prevented from communicating directly with the base radio. R1, R3, and R6 have direct communications with either R2 or R5, both of which have direct communications with the base radio. R7 has direct
communications with R6 and can use R6 to route messages to and from the base through R5.
Using the tree routing function of the CCT900, all nodes will be able to send and receive data to and from
the centrally located base. R2, R5, and R6 which are configured to relay data to and from other nodes in
addition to sending their own sensor data are called routing remotes, or routers. Note that there is no
hardware or firmware difference between CCT900 base, remote and router nodes - they are simply
configured for the particular mode of operation.
As the system is powered up, R2, R4, and R5 will join by registering with the base radio. R2 and R5, once
they have registered with the base radio, will start sending out beacons so that R1, R3, and R6 can join
the tree-routing system through them. In the case of R6, it will wait until it has joined the system through
R5 before sending out the beacons that will let R7 join the system through it.
Figure 2.12.1.1
CCT900 Tree Routing
Page 23

Page 22 of 90
CCT900
Data sent from the base radio in the central location will be routed down the “tree” to the intended node of
the network. Data from the nodes will be routed up the tree to the base or to another node in the system.
Note that it is possible to send data from one node to another node rather than sending it to the base.
A tree-routing system can operate in a polling mode where an application sends data requests to each of
the nodes as needed, or it can operate where devices attached to the node radios send data whenever
they have it to send. Additionally, the auto-report function of the CCT900 radio can be used to send data
through the tree on a timer or interrupt basis.
To set up the example system, all of the CCT900s, including the base, must be configured with the same
tree routing ID, and have tree routing option enabled. In addition, R2, R5, and R6 must be assigned
individual BaseModeNetID parameters, and then configured for router operation. The network IDs and
network addresses will be automatically assigned as the system forms. Figure 2.12.1.2 shows one way
that the network IDs and system addresses could be assigned.
Note that the routing nodes, R2, R5, and R6 have two network-related IDs - a ParentNetworkID and a
BaseModeNetID. The ParentNetworkID is used by a router to join the tree-routing system, and the BaseModeNetID is the ID the router uses to let other nodes join the system through it.
While the tree-routing system can form automatically, it is also possible to do additional node configuration to control how the system forms. The following sections provide details of all the tree routing related
configuration commands plus details of the addressing used in a tree routing system.
Figure 2.12.1.2
Example CCT900 Tree Routing System
Page 24
Page 23 of 90
CCT900
2.12.2 Tree-Routing System Networks
A CCT900 tree-routing system consists of one base and up to 63 routers, where the base and each
router can forward messages to/from a total of 126 child radios (leases enabled)1. A child radio can be
either a remote or router, within the system limitation of 63 routers total.
Within a CCT900 tree-routing system, a network refers to a group of radios communicating with a router
or base acting as a parent, and all of the child radios that are linked to this parent. Hop-by-hop, a router
alternates from being a child of its parent network on one hopping pattern to being a parent of its own
network on a different hopping pattern.
The base maintains a routing table that describes the organization of all routers in its system. This table is
used by the base and the routers to determine which direction, up to the base, or down to its children, to
route a packet. The base updates the routing table using information in the heartbeat packets it receives
from the routers in its system. The base periodically broadcasts this routing table to inform all system
radios of the current system configuration. All heartbeat packets received by the base are also output to
its host (PC). The default channel access for tree-routing systems is CSMA (mode 1).
2.12.3 Tree-Routing System Addressing
Except for tree-routing systems, CCT900 remotes are addressed from the base using their three-byte
hardware MAC addresses. In turn, remotes address the base using the address 0x000000, rather than
the base radio’s hardware MAC address. In tree-routing systems, however, radios are addressed using
system addresses rather than their hardware MAC addresses. Much of the planning and commissioning
activities for a CCT900 system involve configuring system addresses.
Like MAC addresses, tree-routing system addresses contain three bytes. However, the most significant
byte of a system address is currently unused and can be assigned any value (typically 0xFF). The middle
byte of a system address is the network ID or NwkID of a base or router. The NwkID is always 0x00 for
the base, and will have a value in the range of 0x01 to 0x3F for a router. The least significant byte of the
system address is called the network address or NwkAddr. The NwkAddr is always 0x00 for the base and
all the routers in a system. For a remote, the NwkAddr will have a value in the range of 0x01 to 0x7E, so
the system address of a remote will contain the NwkID of its parent base or router, plus its own NwkAddr.
Several parameters are involved in the formation of a CCT900 tree-routing system. All radios that will
become part of a tree-routing system must set the TreeRouteEn parameter to 0x01. Further, all radios
must be loaded with the same tree-routing system ID parameter, referred to as the TreeRouteSysID. This
parameter allows systems to physically overlap without ambiguity as to which system a radio should join.
When a CCT900 radio is configured as the base, it automatically assumes a NwkID of 0x00 and NwkAddr
of 0x00. When a radio is configured as a router, it automatically assumes a NwkAddr of 0x00. The router’s NwkID byte is held in its BaseModeNetID parameter, and will have value in the range of 0x01 to
0x3F. The BaseModeNetID parameter must be manually set in all routers. As discussed below, when a
router’s addressing is totally manually configured, the remote-mode NwkAddr (network address) is loaded
from a router’s StaticNetAddress parameter, otherwise the default value 0xFF of the parameter should be
preserved to allow dynamic assignment by the router’s parent.
1. Tree-routing systems can run without leases enabled to remove the 126 child limit on the base and routers in some circumstances. However, this takes special system planning. Contact MURATA technical support for details.
Page 25
Page 24 of 90
CCT900
The InitialParentNwkID parameter controls which parent a child router or remote can join. Setting this
value to 0x00 forces a router or a remote to join with only the base. Setting this parameter to the NwkID of
a parent router forces a child router or a remote to join only this parent’s network. Setting this parameter
to 0xFF in a router or remote allows them to join with any parent.
The StaticNetAddr parameter controls the assignment of the NwkAddr byte in a remote’s system address.
A remote’s NwkAddr can be manually assigned by setting the StaticNetAddr to a value between 0x01 and
0x7E. Setting the StaticNetAddr parameter to 0xFF allows the remote’s parent to dynamically assign a
NwkAddr.
As discussed above, an example CCT900 tree-routing system is shown in Figure 2.12.1.2. The example
system includes remote R4 which is directly linked to the base, routers R2 and R5 which are directly
linked to the base, remotes R1 and R3 which are linked to router R2, remote R7 which is linked to router
R6, which in turn is linked to router R5. The parent network ID, the system address and for routes the
base-mode network ID are shown in hexadecimal format.
Note that when dynamic address assignment is used, the system addresses of some of the radios in the
system will not be immediately apparent. A radio’s system address can be obtained by broadcasting a
Discover command from the base which contains the radio’s hardware MAC address. The radio will send
a DiscoverReply with its system address. After joining one of the system networks, all routers and remotes periodically transmit heartbeat status messages that contains their MAC address, network address,
network ID and other information. Note that the address of any radio can be constructed as follows:
0xFF + NwkID + NwkAddr.
2.12.4 Tree-Routing System Implementation Options
There are three ways to assign parent network IDs and system addresses to the routers and remotes in a
tree-routing system - dynamic router parent and remote system address assignment, manual router
parent assignment with dynamic remote address assignment, and manual router parent and remote
address assignment.
Dynamic router parent and remote address assignment is the preferred method for most systems that
contain just a few routers. This assignment method provides several advantages. The router parent and
remote system addresses do not have to be pre-assigned, reducing initial system planning details. In
case of a parent failure, child devices will automatically attempt to join another parent. Once the system
becomes organized, heartbeat status messages and/or Discover commands can be used to log the
system addresses against the MAC addresses of each router and remote in the system.
Manual router parent assignment with dynamic remote address assignment is the preferred method for
most systems with a large number of routers. Manual router parent assignment avoids the possibility of
the system creating a long chain of parent router-child router links which would introduce unnecessary
message latency. However, manual router assignment precludes a child router from attempting to link
with another parent in case its parent router fails. The parent address of each router is known before the
system becomes organized, and heartbeat status messages and/or Discover commands can be used to
log the system addresses against the MAC addresses of each remote in the system.
Manual router parent and remote address assignment allows all radios addressing to be preplanned and
preset before a system is installed. Manual system addressing precludes child radios from attempting to
re-link to the system by joining another parent if the assigned parent fails, but simplifies application code
Page 26
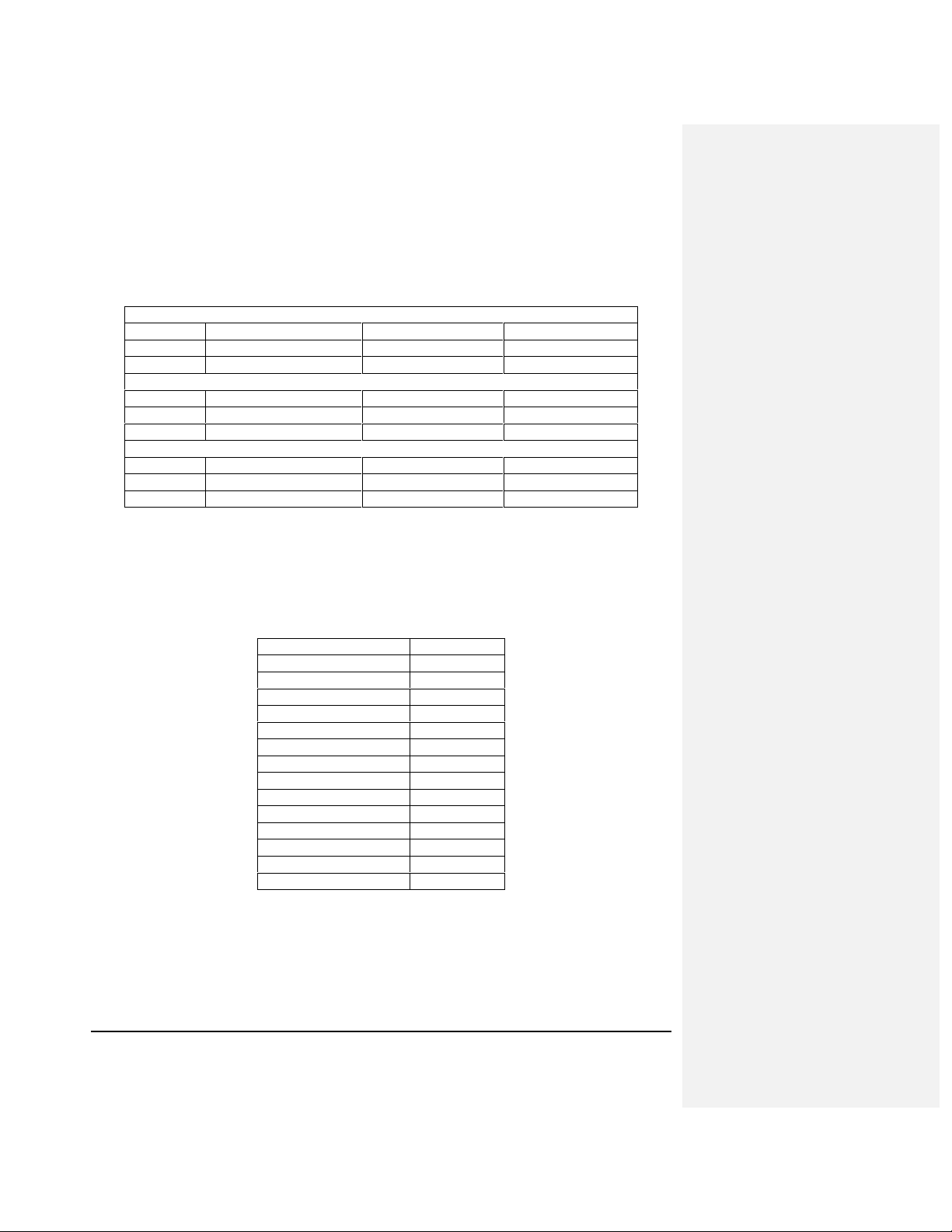
Page 25 of 90
CCT900
development by removing the need to dynamically update a database that matches system addresses to
MAC addresses for each router and remote. The task of manually assigning system addresses to all
routers and remotes in a tree-routing system can be somewhat tedious. Contact MURATA’s module
technical support group for the latest support tools for manual address assignment. Table 2.12.4.1 summarizes radio parameter settings for each assignment method.
Dynamic Router Parent Assignment and Dynamic Remote System Address Assignment
Radio
InitialParentNwkID
StaticNetAddress
BaseModeNetID
Router
0xFF (join any parent)
0xFF (assigned by parent)
0x01 - 0x3F (router NwkID)
Remote
0xFF (join any parent)
0xFF(assigned by parent)
0xFF (not used by remote)
Manual Router Parent Address Assignment with Dynamic Remote System Address Assignment
Radio
InitialParentNwkID
StaticNetAddress
BaseModeNetID
Router
0x00 - 0x3F (specifies parent)
0xFF (assigned by parent)
0x01 - 0x3F (router NwkID)
Remote
0xFF (join any parent)
0xFF(assigned by parent)
0xFF (not used by remote)
Manual Router Parent and Remote System Address Assignment
Radio
InitialParentNwkID
StaticNetAddress
BaseModeNetID
Router
0x00 - 0x3F (specifies parent)
0x01 - 0x7E (sent to parent)
0x01 - 0x3F (router NwkID)
Remote
0x00 - 0x3F (specifies parent)
0x01 - 0x07 (sent to parent)
0xFF (not used by remote)
Table 2.12.4.1
Tree-routing networks can support peer-to-peer communications. However, the value of the P2PReply-
Timeout parameter (see Section 4.2.2) is interpreted differently in a tree-routing system compared to a
point-to-multipoint network. In a point-to-multipoint network, the P2PReplyTimeout parameter is in units of
hops. In tree-routing systems, this parameter is in units of hop pairs, due to the system routers alternating
between remote mode and base mode hop-by-hop. Referring to Figure 2.12.1.2, the minimum useable
value for peer-to-peer communications between Remote 1 and Remote 7 is determined as follows:
Route Segment
Required Hops
Remote R1 to Router R2
1
Router R2 to Base
1
Base Turn Around
1
Base to Router R5
1
Router R5 to Router R6
1
Router R6 to Remote R7
1
Remote R7 Reply Turn Around
1
Remote R7 to Router R6
1
Router R6 to Router R5
1
Router R5 to Base
1
Base Turn Around
1
Base to Router R2
1
Router R2 to Remote R1
1
Total
13
Table 2.12.4.2
The minimum number of hops required is 13, so the minimum P2PReplyTimeout parameter value would
be 7 hop pairs. This minimum value provides no tolerance for transmission retries. Selecting a value 50%
to 100% larger is recommended, in the range of 11 to 14 hop pairs.
Page 27

Page 26 of 90
CCT900
2.13 Serial Port Operation
CCT900 networks are often used for wireless communication of serial data. The CCT900 supports serial
baud rates from 1.2 to 460.8 kb/s. Listed in Table 2.13.1 below are the supported data rates and their
related byte data rates and byte transmission times for an 8N1 serial port configuration:
Baud Rate kb/s
Byte Data Rate kB/s
Byte Transmission Time ms
1.2
0.12
8.3333
2.4
0.24
4.1667
4.8
0.48
2.0833
9.6
0.96
1.0417
19.2
1.92
0.5208
28.8
2.88
0.3472
38.4
3.84
0.2604
57.6
5.76
0.1736
76.8
7.68
0.1302
115.2
11.52
0.0868
230.4
23.04
0.0434
460.8
46.08
0.0217
Table 2.13.1
To support continuous full-duplex serial port data flow, an RF data rate higher than the serial port baud
rate is required for FHSS. Radios transmissions are half duplex, and there are overheads related to
hopping frequencies, assembling packets from the serial port data stream, transmitting them, sending
ACK’s to confirm error-free reception, and occasional transmission retries when errors occur.
For example, consider a TDMA mode 2 system with one remote operating up to 20 miles away at
500 kb/s, with the BaseSlotSize parameter set to 64 bytes and the RemoteSlotSize parameter set to 64
bytes.
Page 28

Page 27 of 90
CCT900
The average full-duplex serial port byte rate that can be supported under error free conditions is:
64 Bytes/4.85 ms = 13.2 kB/s, or 132 kb/s for 8N1
Continuous full-duplex serial port data streams at a baud rate of 115.2 kb/s can be supported by this
configuration, provided only occasional RF transmission errors occur. Plan on an average serial port data
flow of 90% of the calculated error-free capacity for general-purpose applications.
The CCT900 transmit and receive buffers hold at least 1024 bytes and will accept brief bursts of data at
high baud rates, provided the average serial port data flow such as shown in the example above is not
exceeded. It is strongly recommended that the CCT900 host use hardware flow control in applications
where the transmit buffer can become full. The host must send no more than 32 additional bytes to the
CCT900 when the CCT900 de-asserts the host’s CTS line. In turn, the CCT900 will send no more than
one byte following the host de-asserting its RTS line. Three-wire serial port operation is allowed through
parameter configuration, as discussed in Section 4.2.4. However, data loss is possible under adverse RF
channel conditions when using three-wire serial operation due to buffer overruns.
2.14 SPI Port Operation
The CCT900 SPI port data rate is configurable in 127 steps from 6.35 to 80.64 kb/s using the SPI_ Divisor parameter. The SPI data rate is the clocking rate the CCT900 uses in Master mode. The SPI data
rate is also used in Slave mode to time SPI Select (/SS) sampling, etc. Where possible, devices connected to the CCT900 SPI port should be configured to match the 80.64 kb/s data rate. In any event, the SPI
data rate used by the CCT900 and the connected device should be matched within a few percent for
efficient data transfers. SPI port operation is full duplex in the sense that a single clock signal simultaneously shifts data into and out of the SPI port. In order for the Master (host) to receive data from a CCT900
SPI Slave, it must clock bytes into the CCT900.
As show in Figure 2.14.1, CCT900 SPI slave mode operation is supported by two control signals from the
CCT900. The /HOST_CTS line provides the same flow control function for SPI Slave mode as it does for
the serial (UART) port. The Master (host) can clock messages into the CCT900 SPI Slave whenever
/HOST_ CTS is set to a logic low state. The Master can complete clocking one protocol formatted message into the CCT900 if /HOST_CTS switches high part way through the message as shown in Figure
2.14.2, but must then stop sending transmit message bytes until the CCT900 resets /HOST_CTS to a
logic low state. If the CCT900 slave is holding a received message(s) when the SPI master clocks in a
message to transmit, received message bits will be simultaneously clocked out on the MISO line while the
message to be transmitted is clocked in on the MOSI line. The end of a received message will often not
be aligned with the end of a message to be transmitted, so additional clocking may be required to complete the transfer of a received message(s). It is acceptable to clock 0x00 null bytes in on the MOSI line to
retrieve received message bytes when /HOST_CTS is high, but not transmit message bytes.
Page 29

Page 28 of 90
CCT900
GPIO port 4 can be alternately configured to provide a received message flag, referred to as SPI_RX_
AVL. Operation of this line is shown in Figure 2.14.3. Once the SPI_RX_AVL flag goes high, RX message
bytes can be clocked out on the MISO line by clocking 0x00 null bytes and/or transmit message bytes in
on the MOSI line. Note that nine to ten 0x00 null bytes will precede each received message, which is
always protocol formatted. Following the null bytes, the 0xFB start of message symbol will then be
clocked out, followed by the message length byte. The length byte can be used to confirm that all the
bytes in each received message have been clocked out. If a CCT900 slave is holding more than one
received message, the SPI_RX_AVL flag will remain high until all messages have been completely
clocked out.
In SPI slave mode, de-asserting and then asserting the /SS line resets the CCT900 SPI port on a byte
boundary. The /SS line can be toggled this way between every byte to assure bit streams into and out of
the SPI port remain byte framed. Less frequent /SS line toggling is also acceptable in most applications. It
is recommended that /SS be toggled at the start and end of each transmit message, and after every 256
null bytes when clocking to output a received message. The /SS line should also be toggled at the end of
each received message.
Figure 2.14.4 shows the signals a CCT900 uses in SPI Master mode. When periodic I/O reporting is
enabled on a CCT900 remote configured as an SPI Master, the remote will clock out a stored command
string, SPI_MasterCmdStr, to collect data from a Slave peripheral each time the I/O report timer fires. The
collected data is then transmitted as a TXData message. Alternatively, a host connected to the base can
transmit an SPI command as a TXData message to the remote. The remote will clock the command into
its Slave peripheral and transmit back the Slave’s response, as show in Figure 2.14.5. In either case, the
command string and response string are limited to 32 bytes. Only data messages are routed through the
CCT900’s SPI port in Master mode. Command packets and command replies are routed through the
primary serial port. See Section 4.2.4 for additional SPI parameter details.
Page 30

Page 29 of 90
CCT900
2.15 Sleep Modes
To save power in applications where a remote transmits infrequently, the CCT900 supports hardware and
firmware sleep modes. Hardware sleep mode is entered by switching SLEEP/DTR Pin 11 on the CCT900
from logic low to high. While in hardware sleep mode, the CCT900 consumes less than 50 µA at room
temperature. This mode allows a CCT900 to be powered off while its host device remains powered. After
leaving hardware sleep mode, the radio must re-synchronize with the base and re-register. Note that
sleep mode is not available on tree-routing routers.
In addition to the sleep mode controlled by Pin 11, in CSMA mode the CCT900 remotes support an
additional sleep mode to support battery-powered applications. When this mode is enabled, the CCT900
is in a low-power state and only wakes up in response to the I/O report triggers. The following list explains
the rules that sleeping remotes follow:
The CCT900 will wake up when any of the enabled I/O report trigger conditions fire. When any of
the ADC triggers are enabled, the radio will also wake up every ADC_SampleIntvl long enough to
sample the ADCs, and then go back to sleep.
When a sleeping radio wakes up, it must acquire and synchronize to its base before it can send
or receive any data. To prevent excessive battery use, if the remote is unable to acquire before
the WakeLinkTimeout elapses (because it is no longer in range, for example), it will cancel any
pending event trigger(s) and go back to sleep.
If a remote is linking for the first time or if its last attempt to acquire and synchronize was unsuc-
cessful, it will scan and record the entire broadcast system parameter list before it goes back to
sleep. Otherwise, in order to conserve battery life, a sleeping remote will update any values that it
may hear while it is awake, but is not required to listen to the entire list.
If a remote is linking for the first time or if its last attempt to acquire and synchronize was unsuc-
cessful, it will send a registration request to the base, allowing it to announce its presence to the
host. Otherwise, in order to conserve battery life, a sleeping remote will not register each time it
reacquires link with its base on successive wakeups.
After a remote has received an acknowledgement for its I/O report, a WakeResponseTime timer
is started before the remote goes back to sleep. This allows the base host time to send a message to the remote. Note that the only notification that the base host application has that a remote
is awake is its report packet. In order to send it data, the base host must ensure that the message
is transmitted and received before the remote's WakeResponseTime window elapses. If this function is not needed, the WakeResponseTime can be set to zero to disable it.
The lease renewal mechanism is not supported for sleeping remotes. In order to successfully use sleeping remotes, the user must ensure that the system is configured for CSMA mode and that leases are
disabled. If these settings are not used, there is no guarantee that the remotes will be able to communicate reliably. Because leases are not supported, there is no built-in mechanism for the base to detect or
announce to its host if a remote leaves the network.
To summarize, while a remote is awake, the following list of condition checks are used to determine if and
when it is allowed to go back to sleep:
Page 31

Page 30 of 90
CCT900
If the remote is linking for the first time or was unsuccessful linking on its last attempt, it will re-
main awake to record the beacon system parameter list.
At wakeup, the WakeLinkTimeout timer is started. If the remote is unable to acquire link before
this elapses, it goes back to sleep.
If the remote receives an acknowledgement for a data packet it has sent (typically an Event
packet, but in theory it could be any other type of message), it starts or resets the WakeRe-
sponseTime timer to remain awake.
So long as a GPIO for which I/O reporting is enabled for a level trigger remains in its triggered
state, the remote will remain awake.
The remote will remain awake while it still has any ARQ attempts left for a queued transmit pack-
et of any type.
The remote will remain awake while it is has serial characters in its buffer left to transmit to its
local host.
Sleep functions are controlled by the following registers (see Section 4.2):
SleepMode - enables/disables sleep mode.
WakeResponseTime - sets the amount of time that a remote will wait for a
response after sending an I/O report.
WakeLinkTimeout - sets the maximum time that a remote will spend trying
to acquire it base before giving up.
Sleep is also affected by the following registers associated with I/O reporting: IO_ReportTrigger,
IO_ReportInterval, ADC_SampleIntvl, and GPIO_EdgeTrigger. The following table indicates how the
status and control pins function on sleeping remotes:
Page 32

Page 31 of 90
CCT900
Pin
Awake
Sleep
/HOST_RTS
Normal operation
high impedance
/HOST_CTS
Normal operation
0 V
/DCD
Normal operation
0 V
ACT
3 V
0 V
DIVERSITY
Normal operation
0 V
RADIO_TXD
Normal operation
Hi-Z
RADIO_RXD
Normal operation
0 V
Table 2.15.1
Note that the ACT pin may be used by a local host to detect when a sleeping remote is awake. The
behavior of the GPIOs during sleep is governed by the GPIO_ SleepMode, GPIO_SleepDir, and
GPIO_SleepState configuration registers. Refer to the register definitions in Section 4.2. As a default
behavior, toggling the DTR line of a sleeping remote will cause it to reset, effectively waking the remote
up. See the description of the SerialControls parameter for additional information.
2.16 Encryption
The CCT900 supports 128-bit AES encryption of data and configuration packets. Encryption is enabled
by setting the EncryptionKey register to a value other than a string of NULL (0x00) bytes. A remote without encryption enabled cannot link to an encrypted base, and an encrypted remote will not attempt to link
to an unencrypted base. A remote's encryption key must match that of the base before it can link. The
EncryptionKey register can be set over the air so it can be changed periodically if desired. Once an
encryption key has been entered, it can be changed but it cannot be read back.
2.17 Synchronizing Co-located Bases
The EX_SYNC input (Pin 15) on the CCT900 allows co-located bases to synchronize their transmissions
so they all transmit at the same time. This prevents the situation where one base is transmitting while
another nearby base is trying to hear a distant remote. Even though the base radios may be on different
frequencies, because of their close proximity, the transmitting base can reduce the receiving base’s ability
to hear distant remotes. The EX_SYNC input has the following characteristics:
1. Base radios trigger on the rising edge of the pulse applied to their EX_SYNC input.
2. All co-located bases must use the same hop duration and the period of the pulse train applied to
the EX_SYNC input must be within ±10 µs of this hop duration.
3. The co-located bases must use different network IDs but the same frequency subband, which assures they are using different hopping patterns.
4. A “narrow” pulse of 50 to 800 µs triggers base beacon synchronization. A train of narrow pulses
as described above will synchronize a group of co-located base stations after a period of time.
Page 33

Page 32 of 90
CCT900
3.0 CCT900 Hardware
The major components of the CCT900 include a 900 MHz FHSS transceiver and a low current 32-bit
microcontroller. The CCT900 operates in the 900 MHz ISM band. The module includes nine frequency
subbands and 14 total frequency channels to support the various 900 MHz frequency allocations used
throughout the world. The CCT900 has three selectable RF output power levels: 10, 63, and 250(pk)
mW. Also, there is one RF transmission rates: 362 kb/s per carrier. The CCT900 includes a low-noise
receiver preamplifier and a high efficiency transmitter amplifier, providing excellent range in outdoor
applications.
The CCT900 provides a variety of hardware interfaces. There are two serial ports plus one SPI port.
Either the primary serial port or the SPI port can be selected for data communications. The second serial
port is dedicated to diagnostics. The primary and diagnostic serial ports support standard baud rates up
to 460.8 kb/s. The SPI port supports data rates up to 80.64 kb/s. Also included are three 10-bit ADC
inputs, two 8-bit PWM outputs, and six general-purpose digital I/O ports. Four of the digital I/O ports
support an optional interrupt-from-sleep mode when configured as inputs. The radio is available in two
mounting configurations. The CCT900 is designed for plug-in connector mounting.
Page 34

Page 33 of 90
CCT900
3.1 CCT900 Specifications
Characteristic
Sym
Minimum
Typical
Maximum
Units
Operating Frequency Range
903
927.079
MHz
Hop Dwell Time
10
ms
Number of Frequency Hopping Subbands
Number of RF Channels in a Subband
14
Modulation
FSK
RF Data Transmission Rates
362
kb/s
Receiver Sensitivity:
10-5BER @ 362 kb/s
-100
dBm
Transmitter RF Output Power Levels
10, 63, 190(rms)250(pk)
mW
Optimum Antenna Impedance
50
Ω
RF Connection
U.FL Connector
Network Topologies
Point-to-Point, Point-to-Multipoint
Peer-to-Peer, Tree Routing
Access Schemes
TDMA and CSMA
Number of Network Nodes:
TDMA
16
CSMA
unlimited
ADC Input Range
0
3.3
V
ADC Input Resolution
10
bits
Signal Source Impedance for ADC Reading
10
KΩ
PWM (DAC) Output Range
0
3.3
V
PWM (DAC) Output Resolution
8
bits
PWM Output Period
20
µs
Primary and Diagnostic Serial Port Baud Rates
1.2, 2.4, 4.8, 9.6, 19.2, 28.8, 38.4, 57.6, 76.8,
115.2, 230.4, 460.8
kb/s
Serial Peripheral Interface Data Rate
6.35
80.64
kb/s
Digital I/O:
Logic Low Input Level
-0.5
0.8
V
Logic High Input Level
2
3.3
V
Power Supply Voltage Range
VCC+3.3
+5.5
Vdc
Power Supply Voltage Ripple
10
mV
P-P
Peak Transmit Mode Current, 63 mW Output
600
mA
Average Operating Receive Current:
Base
105
mA
Remote, No Data Transmission
35
mA
Remote, 9.6 kb/s Continuous Data Stream
40
mA
Remote, 115.2 kb/s Continuous Data Stream
53
mA
Sleep Current
50
2251µA
Operating Temperature Range
-40
85oC
Operating Relative Humidity Range (non condensing)
1090%
1. Maximum sleep current occurs at +85oC
Table 3.1.1
Page 35

Page 34 of 90
CCT900
3.2 Module Interface
Electrical connections to the CCT900 are made through the I/O pins on the CCT900. The hardware I/O
functions are detailed in the table below:
Pad
Name
I/O
Description
1
PKT_DET
O
Packet detect output. Signal switches logic high at the end of the start-of-packet symbol and switches logic low at the end of the end-of-packet symbol on both received and transmitted packets.
PKT_DET provides a timing reference for use in network timing evaluations, etc.
2
RSVD
-
Reserved pad. Leave unconnected.
3
ADC_REF
I
ADC supply and external full scale reference voltage input. Voltage range is 2.4 to 3.3 Vdc. Connect
pad 34 to this input to reference the ADC full scale reading to the module’s 3.3 V regulated supply.
4
RSVD
-
Reserved pad. Leave unconnected.
5
GPIO0
I/O
Configurable digital I/O port 0. When configured as an input, interrupt from sleep can be invoked.
When configured as an output, the power-on state is also configurable. Sleep mode direction and
state are also configurable.
6
GPIO1
I/O
Configurable digital I/O port 1. Same configuration options as GPIO0.
7
GPIO2
I/O
Configurable digital I/O port 2. Same configuration options as GPIO0.
8
GPIO3
I/O
Configurable digital I/O port 3. Same configuration options as GPIO0, with RS485 driver enable an
alternate function.
9
PWM0
O
8-bit pulse-width modulated output 0 with internal low-pass filter. Filter is 1storder, 159 Hz 3 dB BW.
10
PWM1
O
8-bit pulse-width modulated output 1 with internal low-pass filter. Filter is 1storder, 159 Hz 3 dB BW.
11
SLEEP/DTR
I
Default functionality is active high module sleep input (active low DTR). When switched low after
sleep, the module executes a power-on reset. Usually connected to host DTR.
12
ADC2
I
10-bit ADC input 0. Full scale reading is referenced to the ADC_REF input.
13
ADC1
I
10-bit ADC input 1. Full scale reading is referenced to the ADC_REF input.
14
ADC0
I
10-bit ADC input 2. Full scale reading is referenced to the ADC_REF input.
15
EX_SYNC
I
Rising-edge triggered input for synchronizing co-located bases. Synchronization pulse interval must
equal the hop dwell time ±10 µs. Pulse width must be in the range of 50 to 800 µs.
16
DIAG_TX
O
Diagnostic UART transmitter output.
17
DIAG_RX
I
Diagnostic UART receiver input.
18
/CFG
I
Protocol selection input. Leave unconnected when using software commands to select transparent/protocol mode (default is transparent mode). Logic low selects protocol mode, logic high selects
transparent mode.
19
VCC
I
Power supply input, +3.3 to +5.5 Vdc.
20
GND
-
Power supply and signal ground. Connect to the host circuit board ground.
21
GND
-
Power supply and signal ground. Connect to the host circuit board ground.
22
GPIO4
I/O
Configurable digital I/O port 4. When configured as an output, the power-on state is configurable.
The SPI RX data available flag, SPI_RX_AVL, is a configurable alternate function.
23
GPIO5
I/O
Configurable digital I/O port 5. Same configuration options as GPIO4, with antenna diversity control
an alternate function.
24
GND
-
Logic ground.
Page 36

Page 35 of 90
CCT900
25
ACT
O
Data activity output, logic high when data is being transmitted or received.
26
/DCD
O
Default functionality is data carrier detect output, which provides a logic low on a remote when the
module is locked to FHSS hopping pattern and logic low on a base when at least one remote is
connected to it.
27
RSVD
-
Reserved pad. Leave unconnected.
28
RSVD
-
Reserved pad. Leave unconnected.
29
RSVD
-
Reserved pad. Leave unconnected.
30
/HOST_RTS
I
UART flow control input. The host sets this line low to allow data to flow from the CCT900 on the
RADIO_TXD pin. When the host sets this line high, the CCT900 will stop sending data.
31
RADIO_TXD
O
UART transmitter output. The CCT900 sends serial data to the host on this pin. The sleep mode
state of this pin is configurable.
32
RADIO_RXD
I
UART receiver input. The CCT900 receives serial data from the host on this pin.
33
/HOST_CTS
O
UART or SPI flow control output. The CCT900 sets this line low to indicate it is ready to accept data
from the host on the RADIO_RXD or MOSI input. When the CCT900 sets this line high, the host
must stop sending data. The sleep mode state of this pin and /DCD is jointly configurable.
34
VMOD
O
Module’s +3.3 V regulated supply output. Connect to pad 3 to support 3.3 V full scale and/or
ratiometric ADC readings, etc. Current drain on this output should be no greater than 5 mA.
35
/SS
-
SPI active low slave select. This pin is an output when the CCT900 operating as a master, and an
input when it is operating as a slave.
36
MOSI
-
SPI master out, slave in function. This pin is an output when the CCT900 is operating as a master,
and is an input when the CCT900 is operating as a slave.
37
MISO
-
SPI master in, slave out function. This pin is an input when the CCT900 is operating as a master,
and is an output when the CCT900 is operating as a slave.
38
SCLK
-
SPI clock signal. This pin is an output when operating as a master, and an input when operating
as a slave.
39
/RESET
I
Active low module hardware reset.
40
RSVD
-
Reserved pad. Leave unconnected.
Table 3.2.1
3.3 CCT900 Antenna Connector
A U.FL miniature coaxial connector is provided on both CCT900 configurations for connection to the
RFIO port. A short U.FL coaxial cable can be used to connect the RFIO port directly to an antenna. In this
case the antenna should be mounted firmly to avoid stressing the U.FL coaxial cable due to antenna
mounting flexure. Alternately, a U.FL coaxial jumper cable can be used to connect the CCT900 module to
a U.FL connector on the host circuit board. The connection between the host circuit board U.FL
Figure 3.3.1
Page 37

Page 36 of 90
CCT900
Trace Separation from
50 ohm Microstrip
Length of Trace Run
Parallel to Microstrip
100 mil
125 mill
150 mil
200 mil
200 mil
290 mil
250 mil
450 mil
300 mil
650 mil
Table 3.3.2
connector and the antenna or antenna connector on the host circuit board should be implemented as a
50 ohm stripline. Referring to Figure 3.3.1, the width of this stripline depends on the thickness of the
circuit board between the stripline and the groundplane. For FR-4 type circuit board materials (dielectric
constant of 4.7), the width of the stripline is equal to 1.75 times the thickness of the circuit board. Note
that other circuit board traces should be spaced away from the stripline to prevent signal coupling, as
shown in Table 3.3.2. The stripline trace should be kept short to minimize its insertion loss.
3.4 Input Voltages
CCT900 radio modules can operated from an unregulated DC input (Pad 19) in the range of 3.3 to 5.5 V
with a maximum ripple of 5% over the temperature range of -40 to 85oC. Applying AC, reverse DC, or a
DC voltage outside the range given above can cause damage and/or create a fire and safety hazard.
Further, care must be taken so logic inputs applied to the radio stay within the voltage range of 0 to 3.3 V.
Signals applied to the analog inputs must be in the range of 0 to ADC_REF (Pad/Pin 3). Applying a
voltage to a logic or analog input outside of its operating range can damage the CCT900 module.
3.5 ESD and Transient Protection
The CCT900 circuit boards are electrostatic discharge (ESD) sensitive. ESD precautions must be observed when handling and installing these components. Installations must be protected from electrical
transients on the power supply and I/O lines. This is especially important in outdoor installations, and/or
where connections are made to sensors with long leads. Inadequate transient protection can result in
damage and/or create a fire and safety hazard.
3.6 Interfacing to 5 V Logic Systems
All logic signals including the serial ports on the CCT900 are 3.3 V signals. To interface to 5 V signals, the
resistor divider network shown in Figure 3.5.1 below must be placed between the 5 V signal outputs and
the CCT900 signal inputs. The output voltage swing of the CCT900 3.3 V signals is sufficient to drive 5 V
logic inputs.
Figure 3.6.1
CCT900
Page 38

Page 37 of 90
CCT900
3.7 Power-On Reset Requirements
When applying power to the CCT900, the /RESET Pin 39 and the RADIO_TXD Pin 31 must be initially
held low. The /RESET pin must be held low until the power supply voltage reaches 3.3 volts for 100 ms,
and then set high. The RADIO_TXD must be held low an additional 10 ms after the /RESET pin goes
high. RADIO_TXD is weakly pulled down with a 100K ohm resistor to meet the power-on reset requirement, unless this line is driven high by an external signal.
3.8 Mounting and Enclosures
CCT900 modules are mounted by plugging their pins into a set of mating connectors on the host circuit
board. Refer to Section 8.3 and/or the CCT900 Data Sheet for CCT900 connector details.
CCT900 enclosures must be made of plastics or other materials with low RF attenuation to avoid compromising antenna performance where antennas are internal to the enclosure. Metal enclosures are not
suitable for use with internal antennas as they will block antenna radiation and reception. Outdoor enclosures must be water tight, such as a NEMA 4X enclosure.
3.9 Labeling and Notices
Labeling:
A clearly visible label is required on the outside of the user’s (OEM) enclosure stating the following:
”Contains FCC ID: HSW-CCT900”
”Contains IC: 4492A-CCT900”
Notices:
WARNING: This device operates under Part 15 of the FCC rules. Any modification to this device, not
expressly authorized by MURATA, Inc., may void the user’s authority to operate this device.
FCC NOTICE: This device complies with Part 15 of the FCC rules. Operation is subject to the following
two conditions: (1) this device may not cause harmful interference, and (2) this device must accept any
interference received, including interference that may cause undesired operation.
IC Notice - This device complies with Industry Canada licence-exempt RSS standard(s). Operation is
subject to the following two conditions: (1) this device may not cause interference, and (2) this device
must accept any interference, including interference that may cause undesired operation of the device.
Le présent appareil est conforme aux CNR d'Industrie Canada applicables aux appareils radio
exempts de licence. L'exploitation est autorisée aux deux conditions suivantes : (1) l'appareil ne
doit pas produire de brouillage, et (2) l'utilisateur de l'appareil doit accepter tout brouillage
radioélectrique subi, même si le brouillage est susceptible d'en compromettre le fonctionnement.
Under Industry Canada regulations, this radio transmitter may only operate using an antenna of a type
and maximum (or lesser) gain approved for the transmitter by Industry Canada. To reduce potential radio
Page 39

Page 38 of 90
CCT900
interference to other users, the antenna type and its gain should be so chosen that the equivalent isotropically radiated power (e.i.r.p.) is not more than that necessary for successful communication.
Conformément à la réglementation d'Industrie Canada, le présent émetteur radio peut
fonctionner avec une antenne d'un type et d'un gain maximal (ou inférieur) approuvé pour
l'émetteur par Industrie Canada. Dans le but de réduire les risques de brouillage radioélectrique à
l'intention des autres utilisateurs, il faut choisir le type d'antenne et son gain de sorte que la
puissance isotrope rayonnée équivalente (p.i.r.e.) ne dépasse pas l'intensité nécessaire à
l'établissement d'une communication satisfaisante.
The radio transmitter, IC: 4492A-CCT900, has been approved by Industry Canada to operate with the
antenna types listed below with the maximum permissible gain and required antenna impedance for each
antenna type indicated. Antenna types not included in this list, or having a gain greater than the maximum
gain indicated for that type, are strictly prohibited for use with this device.
Le présent émetteur radio (identifier le dispositif par son numéro de certification ou son numéro
de modèle s'il fait partie du matériel de catégorie I) a été approuvé par Industrie Canada pour
fonctionner avec les types d'antenne énumérés ci-dessous et ayant un gain admissible maximal
et l'impédance requise pour chaque type d'antenne. Les types d'antenne non inclus dans cette
liste, ou dont le gain est supérieur au gain maximal indiqué, sont strictement interdits pour
l'exploitation de l'émetteur.
Dipole 5dBi
Panel 12dBi
Yagi 9dBi
Planar Inverted F Type 4dBi
Canadian ICES-003 - This digital apparatus does not exceed the Class A limits for radio noise emissions
from digital apparatus as set out in the radio interference regulations of Industry Canada.
Le present appareil numerique n’emet pas de bruits radioelectriques depassant les limites applicables
aux appareils numeriques de Classe B prescrites dans le reglement sur le brouillage radioelectrique
edicte par Industrie Canada.
Page 40

Page 39 of 90
CCT900
4.0 Protocol Messages
4.1 Protocol Message Formats
The CCT900 is configured and controlled through a series of protocol mode messages. All protocol mode
messages have a common header format:
012
3 …
SOP
Length
PktType
variable number of arguments …
Figure 4.1.1
The scale above is in bytes.
The Start-of-Packet (SOP) character, 0xFB, is used to distinguish the beginning of a message and to
assure synchronization in the event of a glitch on the serial port at startup.
The Length byte is defined as the length of the remainder of the message following the length byte itself
(or the length of the entire message - 2).
The Packet Type (PktType) byte specifies the type of message. It is a bitfield-oriented specifier, decoded
as follows:
Bits 7-6 Reserved for future use
Bit 5 Event - set to indicate this message is an event
Bit 4 Reply - set to indicates this message is a reply
Bits 3-0 Type - indicates the message type/command
As indicated, the lower 4 bits (3-0) specify a message type. Bit 4 is a modifier indicating that the message
is a command or a reply. A reply message has the original command type in bits 3:0, with bit 4 set to one.
Arguments vary in size and number depending on the type of message and whether it is a message sent
from the host or is a reply from the radio; see Table 4.1.2.1 below. Messages that are generated on the
serial interface by the user are referred to as host messages. Messages that are generated by the radio
are referred to as reply messages. For many message types, there is a reply message that corresponds
to a host message. For example, when the host sends a TxData message, the radio will reply to indicate
the status of the transmission, whether it succeeded or failed. Some message types are host-only or
reply-only; refer to Table 4.1.2.1 for specifics.
4.1.1 Message Types
Each message generally has two forms, a command from the host and a reply from the radio. Depending
on the direction, they have different arguments as shown in Table 4.1.2.1. Event messages from the radio
such as received data packets or status announcements make up a third category of messages. To assist
in interpreting the command-reply data flow, the direction is indicated by the high nibble in the message
type. For example, an EnterProtocolMode command from the host is a message type 0x00, and the
EnterProtocolModeReply from the radio is a message type 0x10. Event messages, including RxData,
RxEvent and Announce packets are indicated by 0x20 in the high nibble of the type byte. If multiple
arguments are to be provided, they are to be concatenated in the order shown. Little-Endian byte format
Page 41

Page 40 of 90
CCT900
is used for all multi-byte arguments, where the lowest order byte is the left-most byte of the argument and
the highest order byte in the right-most byte of the argument.
4.1.2 Message Format Details
Com-
mand
Reply
Event
Description
Direction
Arguments
0x00--
EnterProtocolMode
from Host
DNTCFG (ASCII characters)
-
0x10-EnterProtocolModeReply
from Radio
none
0x01--
ExitProtocolMode
from Host
none
-
0x11-ExitProtocolModeReply
from Radio
none
0x02--
SoftwareReset
from Host
BootSelect
-
0x12-SoftwareResetReply
from Radio
none
0x03--
GetRegister
from Host
Reg, Bank, Span
-
0x13-GetRegisterReply
from Radio
Reg, Bank, Span,Val
0x04--
SetRegister
from Host
Reg, Bank, Span, Val
-
0x14-SetRegisterReply
from Radio
none
0x05--
TxData
from Host
Addr, Data
-
0x15-TxDataReply
from Radio
TxStatus, Addr, RSSI
0x06--
Discover
from Host
MacAddr
-
0x16-DiscoverRely
from Radio
Status, MacAddr, Addr
--0x26
RxData
from Radio
Addr, RSSI, Data
--0x27
Announce
from Radio
AnnStatus, additional fields
--0x28
RxEvent
from Radio
Addr, RSSI, Reg, Bank, Span,Val
0x0A--
GetRemoteRegister
from Host
Addr, Reg, Bank, Span
-
0x1A-GetRemoteRegisterReply
from Radio
If command successful:
TxStatus, Addr, RSSI,
Reg, Bank, Span, Val
If command failed:
TxStatus, Addr
0x0B--
SetRemoteRegister
from Host
Addr, Reg, Bank, Span, Val
-
0x1B-SetRemoteRegisterReply
from Radio
TxStatus, Addr, RSSI
--0x2C
JoinRequest
from Radio
MacAddr, Addr, DeviceMode,
SleepMode
0x0C--
JoinReply
from Host
MacAddr, PermitStatus
0x0D--
RemoteLeave
from Host
MacAddr, BackOffTime
Table 4.1.2.1
Arguments:
Reg = Register location (1 byte)
Bank = Register bank, which provides logical isolation from other data regions (1 byte)
Span = Number of bytes of register data to get or set; must align to a parameter boundary (1 byte)
Val = Value to read/write to/from a register (see table 4.1.2.1 for size and acceptable range).
Data = User data (must fit within the slot size allocation)
MacAddr = MAC address of sender, for a reply or an event, or the recipient for a command (3 bytes)
Addr = Same as MAC address (3 bytes). When specifying a destination address in a tree-routing system,
a system address is used according to the following format (little-Endian byte order):
Page 42

Page 41 of 90
CCT900
for routers - 0x00 0xNN 0xFF, where NN is the NwkID of the router.
for remotes - 0xMM 0xNN 0xFF, where NN is the NwkID of the parent router and MM is the
network address of the remote.
TxStatus = Result of last TxData operation (1 byte)
0x00 = Acknowledgement received
0x01 = No acknowledgement received
0x02 = Not linked (remote)
0x03 = No ACK due to recipient holding for flow control
RSSI = 2’s complement value in dBm, with a range of -128 (0x80) to +125 (0x7D) dBm (1 byte);
large positive RSSI values will not occur under ordinary circumstances. RSSI values 126 (0x7E)
and 127 (0x7F) have special meaning:
0x7F = No RSSI measured because no ACK was received
0x7E = No RSSI because packet was routed
NwkID = Network identifier of network joined (1 byte)
BaseMacAddr = MAC address of base that the remote joined (3 bytes).
AnnStatus = Status announcement (1 byte). Additional fields are also reported
depending on the status code:
Status code Additional fields
0xA0 = Radio has completed startup initialization none
0xA2 = Base: a child has joined the network MacAddr, Reserved, Range
0xA3 = Remote: joined a network, ready for data NwkID, BaseMacAddr, Range
0xA4 = Remote: exited network (base is out of range) NwkID
0xA5 = Remote: the base has rebooted none
0xA7 = Base: remote has left the network. MacAddr
0xA8 = Base: heartbeat received from router or remote MacAddr, NwkAddr, NwkID,
ParentNwkID, BeaconRSSI, AvgTxAtt-
mpts, ParentRSSI, Range
0xA9 = Base: router heartbeat timeout NwkID
New status code field definitions:
ParentNwkID = Network ID of parent (1 byte)
BeaconRSSI = Average power of received beacons (1 byte)
ParentRSSI = Average power of received heartbeat as reported by parent (1 byte)
AvgTxAttempts = Average number of upstream transmit attempts per packet times 4 (1 byte)
Status codes for error conditions Additional fields
E0 = Protocol error - invalid message type none
E1 = Protocol error - invalid argument none
E2 = Protocol error - general error none
E3 = Protocol error - parser timeout none
E4 = Protocol error - register is read-only none
E8 = UART receive buffer overflow none
E9 = UART receive overrun none
EA = UART framing error none
EE = Hardware error none
Page 43

Page 42 of 90
CCT900
Range = Range measurement of joining radio (1 byte). Each count equals 0.29 miles.
BootSelect = Code indicating whether to do a normal reset or a reset to the bootloader (1 byte)
(0 = normal reset, 1 = reset to bootloader)
PermitStatus = Permission for new node to join, 0x00 = denied, 0x01 = permitted (1 byte)
BackoffTime = Time that a node will avoid trying to join a network, in seconds (2 bytes)
(0xFFFF = back off until reset or power cycled)
4.1.3 /CFG Select Pin
A falling edge on the /CFG pin is the equivalent of the EnterProtocolMode command. A rising edge on the
/CFG pin is the equivalent to sending the ExitProtocolMode command. The input to the /CFG pin is debounced to make it compatible with a mechanical switch or jumper.
4.1.4 Flow Control
There are two flow control signals between the radio and the host, /HOST_RTS and /HOST_CTS. See
Section 2.11 for flow control details.
4.1.5 Protocol Mode Data Message Example
In this example, ASCII text Hello World is sent from the base to a remote using a TxData command. The
MAC address of the remote is 0x000102. The protocol formatting for the host message is:
0xFB 0x0F 0x05 0x02 0x01 0x00 0x48 0x65 0x6C 0x6C 0x6F 0x20 0x57 0x6F 0x72 0x6C 0x64
There are 15 bytes following the length byte, so the length byte is set to 0x0F. Note that the 0x000102
MAC address is entered in Little-Endian byte order 0x02 0x01 0x00.
When an ACK to this message is received from the remote, the base outputs a TxDataReply message to
its host:
0xFB 0x06 0x15 0x00 0x02 0x01 0x00 0xC4
The 0x00 TxStatus byte value indicates the ACK reception from the remote. The RSSI value of the received ACK is 0xC4 (-60 dBm).
If the remote is in protocol mode, the message is output in the following format:
0xFB 0x10 0x26 0x00 0x00 0x00 0xC4 0x48 0x65 0x6C 0x6C 0x6F 0x20 0x57 0x6F 0x72 0x6C 0x64
The message is output as an 0x26 event. The address field contains the base (originator) address. Note
that the RSSI value 0xC4 is inserted between the base MAC address and the Hello World user data.
4.1.6 Protocol Mode Tree-Routing MAC Address Discovery Example
In this example, a Discover command is broadcast in a tree-routing system to obtain the system address
of a remote with the MAC address 0x000102.
The protocol formatting for the host message is:
0xFB 0x04 0x06 0x02 0x01 0x00
There are 4 bytes following the length byte, so the length byte is set to 0x04. Note that the 0x000102
MAC address is entered in Little-Endian byte order 0x02 0x01 0x00.
Page 44

Page 43 of 90
CCT900
The target remote will issue a DiscoverReply command as follows:
0xFB 0x08 0x16 0x00 0x02 0x01 0x00 0x01 0x01 0xFF
The 0x00 Status byte value indicates a response from the remote. The tree-routing system address of the
target remote is received in Little-Endian byte order, so the address is 0xFF0101. Referring to Figure
2.12.1.2, this is the system address of Remote R1.
4.2 Configuration Registers
The configuration registers supported by the CCT900 are described below. Registers are sorted into
banks according to similar functions. Default register values are in bold. All changes to parameters are
temporary and will not persist through power cycling until 0x01 has been written to the MermorySave
parameter in Bank FF. Writing 0x00 to the MemorySave parameter will reload the factory default values
which also require writing 0x01 to the MemorySave location. Also note that some parameter changes do
not take effect until they are saved and the module is reset or power cycled. Modules can be reset by
writing 0x00 to the UcReset parameter in Bank FF.
4.2.1 Bank 0 - Transceiver Setup
Size in
Bank Loc'n Name R/W bytes Range Default, Options
00 00 DeviceMode R/W 1 0..3 0 = Remote, 1 = Base, 2 = PTT Remote, 3 = Router
00 01 RF_DataRate R/W 1 0..4 0 = 500, 1 = 200, 2 = 115.2, 3 = 38.4 kb/s,
0XFF = auto
00 02 HopDuration R/W 2 4..4000 10 ms(0x00C8)
00 04 InitialParent NwkID R/W 1 0..255 0xFF = join any network
00 05 SecurityKey R/W 16 0..2
128
all null bytes (0x00) = security disabled
00 15 SleepMode R/W 1 0..1 0 = off, 1 = on, 2 = on after reset
00 16 WakeResponseTime R/W 1 0..255 1 = 50 ms, 0 to disable
00 17 WakeLinkTimeout R/W 1 0..255 5 s
00 18 TxPower R/W 1 0..2 0 = 1 mW; 1 = 10 mW, 2 = 63 mW
00 19 ExtSyncEnable R/W 1 0..1 0 = off; 1 = enable
00 1A DiversityMode R/W 1 0..2 0 = 0 V, 1 = 3.3 V, 2 = toggle
00 1B Reserved 1
00 1C UserTag R/W 16 “CCT900"
00 2C RegDenialDelay R/W 2 10 s
00 2E RmtTransDestAddr R/W 3 0x000000 (Base)
0x00 0x34 TreeRoutingEn R/W 1 0..1 0x00 = off, 1 = enable
0x00 0x35 BaseModeNetID R/W 1 1..63 0xFF (must change on routers)
0x00 0x36 StaticNetAddr R/W 1 1..126, 255 0xFF = dynamic assignment
0x00 0x37 HeartbeatIntrvl R/W 2 1..65535 0x14 (20 seconds)
0x00 0x39 TreeRoutingSysID R/W 1 0..255 0x00
0x00 0x3A EnableRtAcks R/W 1 0..1 0x00 (suppress remote peer-to-peer ACKs)
Note: These settings are individual to each module.
DeviceMode - selects the operating mode for the radio: remote, base, PTT remote (listen mostly remote)
or tree-routing router. Note that changing this setting does not take effect immediately. It must be followed
by a MemorySave command (See Section 4.2.9) and then a hardware reset.
RF_DataRate - this sets the over-the-air data rate. CCT900’s with different RF data rates cannot intercommunicate. The following codes are defined:
0x00 = 500 kb/s (default)
0x01 = 200 kb/s
0x02 = 115.2 kb/s
0x03 = 38.4 kb/s
0xff = auto
Page 45

Page 44 of 90
CCT900
The auto setting will cause a remote to try all four over-the-air rates when scanning for a network to join.
Setting the RF_DataRate to a fixed value on the remotes will allow a network to link much faster than
using the auto setting. However, if the base RF_DataRate is changed when the remotes are set to a fixed
rate, the network will not link. Note that changing this setting does not take effect immediately. It must be
followed by a MemorySave command (See Section 4.2.9) and then a hardware reset.
HopDuration - this sets the duration of the hop frame. The duration is set as a 12-bit value,
0.05 ms/count. Changing the hop duration must be followed by a MemorySave command to allow the
change to persist through a reset or power cycle. A HopDuration change takes effect immediately. Remotes will re-link following a HopDuration parameter change.
InitialParentNwkID - this parameter selects the network ID that a base will use to start a network, or a
remote will be allowed to join. A value of 0xFF instructs a remote to operate in 'promiscuous mode' and
join any network it finds (if set for a base, this will select the default network ID of 0x00.)
In a tree-routing system, this parameter controls which parent a child router or remote can join. Setting
this value to 0x00 forces a router or a remote to join with only the base. Setting this parameter to the
NwkID of a parent router forces a child router or a remote to join only this parent’s network. Setting this
parameter to 0xFF in a router or remote allows them to join with any parent. In a tree-routing system, the
InitialParentNwkID parameter also determines the hopping pattern for the parent and children of each
network. When a network ID equals or exceeds the number of unique hopping patterns, the hopping
pattern selection will “wrap around” to the network ID modulo of the number of hopping patterns. To
prevent interference between networks in a tree-routing system, networks with the same hopping pattern
must be physically separated by enough distance that they cannot receive transmissions from each other.
It is often convenient to set the InitialParentNwkID parameter value on remotes to 0xFF to allow them to
connect to any parent device. However, setting the InitialParentNwkID parameter value to 0xFF on a
system with a large number of routers can be problematical. This could result in very long routing paths,
slowing communications, and possibly causing reply delays to exceed the P2PReplyTimeout parameter
setting. For this reason, it is often best to design a tree-routing system using a large number of routers so
that each router has an explicit InitialParentNwkID.
SecurityKey - this sets the 128-bit AES encryption key to be used. To protect the key, this is a write-only
parameter for the user (always reads back as 0x2A). Refer to the Section 2.16 for further information.
SleepMode - this parameter enables sleep mode, which may be used in conjunction with the automatic
I/O reporting feature to wake up on specified triggers. Sleep mode is only available for remotes, and the
channel access mode for the network must be one of the CSMA modes. The default value for this parameter is 0 (off). Setting this parameter to 1 invokes sleep mode immediately. Setting this parameter to 2
invokes sleep mode following reset, allowing this and other parameter updates to be stored before sleep
mode is invoked.
WakeResponseTime - this parameter sets the length of time that a remote in sleep mode will wait for a
response after sending an I/O report before going back to sleep, from a minimum of 10 ms to a maximum
of 2.5 seconds in 10 ms units. This time interval is set to allow the base host application to respond to a
remote with a packet before the remote returns to sleep. If this parameter is set to 0, the remote will stay
awake indefinitely after sending an I/O report. This allows the application as much time as needs for any
initial configuration after which it can cause the remote to re-enter sleep by setting this to the operating
value. The default value for this parameter is 50 ms.
Page 46

Page 45 of 90
CCT900
WakeLinkTimeout - this parameter sets the maximum length of time that a remote in sleep mode will
spend trying to acquire a link to its base before going back to sleep, from a minimum of 100 ms to 25.5 s
in 100 ms units. If this value is set to 0, the remote will stay awake and continue trying to link to its base
indefinitely.
TxPower - this parameter sets the transmit power level used by the base (fixed), and the maximum
transmit power level used by a remote. A remote may automatically adjust its power below the TxPower
settings based on the signal strength it receives from the base plus the TxPower setting being used by
the base. The default 1 mW TxPower setting is useful for desktop testing. TxPower is usually set to a
higher level to increase operating range in actual applications. Setting bit 4 (0001xxxx) disables the
remote automatic transmit power function.
0x00 = 0 dBm or 1 mW (default)
0x01 = 10 dBm or 10 mW
0x02 = 18 dBm or 63 mW
ExtSyncEnable - this parameter enables or disables the hardware EX_SYNC function on Pin 15. When
enabled, a pulse train can be input on Pin 15 to synchronize the transmission of co-located bases. Disabled by default.
DiversityMode - the following diversity antenna switching options are supported as an output on GPIO5:
0 = 0 V output (default)
1 = 3.3 V output
2 = hop-by-hop toggle between 0 and 3.3 V
UserTag - this is a user definable field intended for use as a location description or other identifying tag
such as a “friendly name”.
RegDenialDelay - when a remote has been removed from a network through a RemoteLeave, the
RegDenialDelay parameter sets the length of time the remote will wait before considering that network a
candidate for joining again. Units are in seconds; the default is 10 s.
RmtTransDestAddr - this parameter sets the destination address that a remote will send packets to when
configured to use transparent mode. The default destination is the base (0x000000). If this field is set to
another remote's MAC address or to the broadcast address, a peer-to-peer packet will be sent. Note that
peer-to-peer packets have higher latency than direct packets between base and remote. This setting has
no effect on the base.
TreeRoutingEn - this parameter enables tree-routing system operation. Tree-routing operation is disabled
by default.
BaseModeNetID - this parameter holds the base-mode network ID used by a router. This parameter must
be set to a unique value while the node is in remote mode. The node can then be configured as a router.
The base-mode network ID of 0 is reserved for the system base. To keep the base routing table transmissions short, low BaseModeNetID values should be used when possible. The base routing table transmissions leave off all unused entries corresponding to higher BaseModeNetIDs. For instance, if the
largest BaseModeNetID being used is 63, the payload in the routing table packet will be 64 bytes long. In
contrast, if the largest BaseModeNetID being used is five, then the payload in the routing table packet will
be only 6 bytes long.
Page 47

Page 46 of 90
CCT900
StaticNetAddr - this parameter holds the lower byte of the system address of a remote. Assigning a value
other than 0xFF provides a fixed (static) address. When this parameter is set to 0xFF, the router assigns
the lower byte of the system address to a remote dynamically. When using fixed network addressing, any
device that can connect to a parent that has any children with fixed network addresses must also have a
unique fixed network address, including child routers.
HeartbeatIntrvl - this parameter sets the interval that heartbeat status messages are sent from each
system radio. Status messages include the node’s parent’s BaseModeNetID, its own routing address, and
miscellaneous performance data. The default value for this parameter is 20 seconds. If the heartbeat
interval is set to 0x0000, remote heartbeats are disabled. Since router heartbeats are needed to maintain
the system routing table, setting the HeartbeatIntrvl value on a router to 0x0000 will cause heartbeats to
be sent at the default 20 second rate. Setting the HeartbeatIntrvl parameter to 0xFFFF will suppress
heartbeats except during registration or when an error is detected in the routing table.
The base maintains a 2-bit counter for each router in the system. The counter is decremented at the
base’s heartbeat interval. If the base does not receive a heartbeat packet from a router for two to three
heartbeat intervals, that router and all of its child routers (and their child routers, etc.) are deleted from the
routing table. It is possible to set the base’s heartbeat interval to a value greater than the heartbeat interval for all the other devices in the network, to prevent premature router timeouts due to network congestion causing heartbeats from routers to be delayed or lost.
The base treats router heartbeat packets differently than remote heartbeat packets. Heartbeat packets
from remotes are not ACKed, while ACKs are sent to a routers originating a heartbeat packets to indicate
reception. This prevents additional heartbeat transmissions by a router until the next heartbeat interval. If
a router does not receive a reply to a heartbeat packet within the configured P2PReplyTimeout interval, it
will persistently re-send the heartbeat packet until its is ACK’ed.
TreeRoutingSysID - this parameter holds the system ID for a tree-routing system.
EnableRtAcks - this parameter controls remote ACK replies for peer-to-peer data packets. The default
configuration for this parameter is 0, which suppresses remote peer-to-peer ACKs. Setting this parameter
to 1 enables peer-to-peer ACKs. This parameter applies to both point-to-multipoint and tree-routing peerto-peer communications.
4.2.2 Bank 1 - System Settings
Size in
Bank Loc'n Name R/W bytes Range Default; Options
0x01 0x00 FrequencyBand R/W 1 0..FF 0x00 to 0x08 = general purpose,
0x04, 0x05 & 0x07 = France, 0xFF = auto
0x01 0x01 AccessMode R/W 1 0..4 2 = TDMA Dynamic Slots
0x01 0x02 BaseSlotSize R/W 1 6..233 50 bytes
0x01 0x03 LeasePeriod R/W 1 0..250 5 s (0 to disable)
0x01 0x04 ARQ_Mode R/W 1 0..3 1 = redundant broadcast to ARQ_AttemptLimit,
ARQAttemptLimit pass to remotes enabled
0x01 0x05 ARQ_AttemptLimit R/W 1 0..63 8 attempts
0x01 0x06 MaxSlots R/W 1 0..15 4 slots
0x01 0x07 CSMA_Predelaty R/W 1 0..255 0x03
0x01 0x08 CSMA_Backoff R/W 1 0..255 0x0A
0x01 0x09 MaxPropDelay R/W 1 0..255 0x45 (20 mi, 32.18 km)
0x01 0x0A LinkDropThreshold R/W 1 0..255 0x0C
0x01 0x0B CSMA_RemtSlotSize R/W 1 1..255 64
0x01 0x0C CSMA_BusyThreshold R/W 1 1..255 20
0x01 0x0D RangingInterval R/W 1 0..255 0 = disable
0x01 0x0E AuthMode R/W 1 0..3 0 = authentication disabled
0x01 0x0F P2PReplyTimeout R/W 1 16 hops
Page 48

Page 47 of 90
CCT900
Bank 1 holds configuration parameters to be input to the base only. The base passes these parameters to
the remotes as needed. The exception is the ARQ_AttemptLimit parameter. If ARQ_Mode bit 1 is set to 1
at the base, the ARQ_AttemptLimit parameter can be set in the remotes and used.
FrequencyBand - this parameter selects the frequency hopping subband. Nine subbands are available,
as shown below. Note that operation in France is limited to subbands 0x04, 0x05 and 0x07.
Subband
Channels
Frequency Range(s)
Notes
0x0014903-927.079MHz
General purpose 14 channel subband
AccessMode - this sets the channel access mode that remotes will use to communicate with the base:
Access Mode Description Max # of Remotes Remote Slot Size
0 Polling unlimited manual
1 CSMA unlimited manual
2 (default) TDMA dynamic slots up to 16 automatic
3 TDMA fixed slots up to 16 automatic
4 TDMA with PTT up to 16 + automatic
unlimited listen only
BaseSlotSize - This parameter set the maximum number of user data bytes that the base can send on a
single hop. This value must be set by the user for all access modes. The default value is 50 bytes.
LeasePeriod - this sets the duration in seconds for leases that remotes receive from the base. If a period
of zero is specified, then lease functions are disabled. The minimum valid lease period is two seconds.
Remotes will attempt to renew their leases at an interval equal to half the lease period. For example, if the
lease period is set to four seconds, remotes will renew their leases every two seconds.
ARQ_Mode - this sets the ARQ mode for delivery of application messages. In ARQ mode, an ACK is
expected from the receiving radio for each message addressed and sent to it. If no ACK is received, up to
ARQ_AttemptLimit, attempts to send the data will be made, after which the message is discarded. In
redundant broadcast mode, each broadcast message is sent exactly ARQ_AttemptLimit times. No ACKS
are sent or expected. The following bit options control this function:
bits 7..2 Not used
bit 1 If set to 0, the base can pass a new ARQ_AttemptLimit to the remotes
If set to 1, the remotes use their own ARQ_AttemptLimit in Bank 1
bit 0 If set to 1, ARQ mode is enabled for Protocol mode; the base will send broadcast packets ARQ_AttemptLimit
times instead of once. If set to 0, broadcast packets are sent once
Page 49

Page 48 of 90
CCT900
ARQ_AttemptLimit - this sets the maximum number of attempts that will be made to send a data packet
on the RF link. Setting this parameter to the maximum value of 63 is a flag value indicating that there
should be no limit to the number of attempts to send each packet (infinite number of attempts). This mode
is intended for point-to-point networks in serial data cable replacement applications where absolutely
nopackets can be lost. Note - if this mode is used in a multipoint network, one remote that has lost link will
shut down the entire network if the base is trying to send it data.
MaxNumSlots - in TDMA access modes, this sets the number of slots that are allowed. In fixed slot mode,
this allocates the number of slots directly. In dynamic slot mode, this sets the maximum number of slots
that may be generated regardless of the number of remotes that attempt to link with the base. Any remotes requesting registration after this limit is reached will be denied registration by the base.
CSMA_Predelay - in CSMA mode 1, this parameter sets the maximum delay between when the base
transmission has finished and when a remote checks for a clear channel. The value of each parameter
count depends on the data rate as shown below. Refer to Section 2.10.2 for more information.
Data Rate Parameter
38.4 kbps 1000 µs/count
115.2 kbps 800 µs/count
200 kbps 600 µs/count
500 kbps 400 µs/count
CSMA_Backoff - in a CSMA mode 1, this parameter sets the maximum length of time that a remote will
back off after it detects a busy channel. The value of each parameter count depends on the data rate as
shown in the CSMA_Predelay table shown above. Refer to Section 2.10.2 for more information.
MaxPropDelay - this is the maximum propagation delay that the base and the remotes will use in their slot
timing calculations, in units of 3.1 µs. This is used to increase the amount of time dedicated to the registration slot. Increasing this value will subtract slightly from the overall slot time available to remotes for
sending data. Note that the free-space round trip propagation delay for one mile is 10.72 µs. Each increment of MaxPropDelay thus corresponds to a maximum radius from the remote to the base of 0.29 mi
(0.46 km). The default setting provides enough time to handle remotes up to 20 miles away. It is recommended to use the default setting unless a path greater than 20 miles is planned at start up. Once linked
to the base, remotes will periodically update their timing based on ranging information from the base,
except in Polling Mode. The frequency with which this value is updated is set by the RangingInterval
parameter discussed below. The current range information is available in the CurrPropDelay parameter.
LinkDropThreshold - this is the number of consecutive beacons missed by a remote that causes the
remote to restart a link acquisition search. Please contact MURATA technical support before making
changes to the parameter.
CSMA_RemtSlotSize - this sets the maximum size for a remote data transmission in polling or CSMA
channel access modes. Setting this parameter to a large value allows a remote to send more data in a
single hop, but can result in fewer remotes having time to send on a given hop. The default is 64 bytes.
CSMA_BusyThreshold - this sets the RSSI energy detection threshold that remotes use to determine
whether the channel is occupied. The factory default should be sufficient for most applications and it is
recommended that this value not be changed.
RangingInterval - this sets the interval in seconds/count when remotes will reassess their range to the
base. Polling (mode 0) disables ranging, so remotes receive ranging information only once each time they
join a network. The RangingInterval timer does not advance while a remote is sleeping.
Page 50

Page 49 of 90
CCT900
AuthMode - this parameter is valid on the base only. It controls how remotes are permitted to join the
network. Permitted values are:
0 = Any remote may join
1 = Authentication by base radio permission table
2 = Authentication by request to host application
3 = Lock authentication to permit only currently registered remotes
P2PReplyTimeout - This parameter sets the reply timeout for peer-to-peer packets sent from one node to
another. Because each leg of the journey from one node to another and back may take multiple transmit
attempts, the length of time to confirm receipt and issue a TxDataReply is subject to more variation than a
transmission directly between a base and a remote. The P2PReplyTimeout parameter specifies the
maximum number of hops or hop pairs that a remote will wait for a reply from its recipient. If a reply
returns sooner than the timeout, the remote will send a TxDataReply indicating success to its host as
soon as it is received, and cancels the timeout. If a reply does not come back before the timeout expires,
the remote will send a TxDataReply to its host indicating failure. If a reply should come back after the
timeout expires the remote will ignore it, as a TxDataReply has already been sent. The units of this parameter are in hops for non tree-routing operation and in hop pairs for tree-routing operation. The default
is eight hops/eight hop pairs.
There is some coupling between the HeartbeatIntrvl parameter setting and the P2PReplyTimeout parameter setting. If the heartbeat interval in seconds is less than the P2PReplyTimeout in hop pairs, it is possible that a router will not repeat an un-ACKed heartbeat packet quickly enough to prevent the base from
timing that router out (heartbeats are repeated only when an ACK is not received within the
P2PReplyTimeout interval.) Thus, setting the P2PReplyTimeout to a very large value relative to the
heartbeat interval could cause problems.
4.2.3 Bank 2 - Status Registers
Size in
Bank Loc'n Name R/W bytes Range Default
0x02 0x00 MacAddress R 3 0..0x0ffffff fixed value
0x02 0x03 CurrNwkAddr R 1 0..255 as set
0x02 0x04 CurrNwkID R 1 0..255 as set
0x02 0x05 CurrRF_DataRate R 1 0..3 as set
0x02 0x06 CurrFreqBand R 1 0..1 as set
0x02 0x07 LinkStatus R 1 0..4 current status
0x02 0x08 RemoteSlotSize R 1 0..243 as set
0x02 0x09 TDMA_NumSlots R 1 0..16 as set
0x02 0x0A Reserved R 1 0..255 reserved
0x02 0x0B TDMA_CurrSlot R 1 0..16 current slot
0x02 0x0C HardwareVersion R 1 0..255 0x00 = CCT900 rev A
0x02 0x0D FirmwareVersion R 1 0..255 current firmware load
0x02 0x0E FirmwareBuildNum R 2 0..2
16
current firmware load
0x02 0x10 Reserved R 1 0..255 reserved
0x02 0x11 SuperframeCount R 1 0..255 current value
0x02 0x12 RSSI_Idle R 1 0..255 as set
0x02 0x13 RSSI_Last R 1 0..255 as set
0x02 0x14 CurrTxPower R 1 0..255 as set
0x02 0x15 CurrAttemptLimit R 1 0..255 as set
0x02 0x16 CurrRangeDelay R 1 0..255 as set
0x02 0x17 FirmwareBuildDate R 8 ASCII as set
0x02 0x1F FirmwareBuildTime R 8 ASCII as set
0x02 0x27 ModelNumber R 1 0..255 0x01
0x02 0x28 CurrBaseModeNetID R 1 0..63, 255 0xFF
0x02 0x29 AveRXPwrOvHopSeq R 1 0..255 as received
0x02 0x2A ParentACKQual R 1 0..255 4*number of attempts to get ACK
MacAddress - returns the radio's unique 24-bit MAC address.
Page 51

Page 50 of 90
CCT900
CurrNwkAddr - this returns the address of the radio in its parent’s network.
CurrNwkID - this returns the ID of the network the radio is currently assigned to or connected to. A value
of 0xFF means the radio is scanning for a network but has not yet joined one.
CurrRF_DataRate - this returns the RF data rate of the network that the radio is currently assigned to or
connected to. If the radio is scanning for a network, this is the current data rate it is using in the scan.
CurrFreqBand - this returns the frequency band of the network that the radio is currently assigned to or
connected to. A value of 0xFF means the radio is scanning for a network but has not yet joined one.
LinkStatus - this returns the radio's current connection status to the network. The following codes are
defined:
LinkStatus Remote Status Base Status
0 initializing initializing
1 unlinked, scanning for a network not used
2 linked, acquiring network parameters not used
3 linked, registering with the base not used
4 linked and registered ready for data transfer
RemoteSlotSize - returns the current remote slot size, defined as the maximum number of message bytes
a remote can send on a single hop. When using protocol mode, the entire packet, including overhead
bytes must be less than or equal to this value or the packet will be discarded. In the three TDMA modes
the remote slot size is automatically computed, and this value is read-only. In polling and CSMA modes,
the remote slot size must be set by the user. The parameter to set this is CSMA_RemtSlotSize in Bank 1.
TDMA_NumSlots - in TDMA access modes, this returns the number of slots currently allocated.
TDMA_CurrSlot - returns the current TDMA slot number assigned to the remote in modes where the slot
position is automatically computed. In modes where this number is not applicable, it is read as 0xFF.
HardwareVersion - returns an identifier indicating the type of radio. A value of 0x41 is defined for the
CCT900 Rev A hardware.
FirmwareVersion - returns the firmware version of the radio in 2-digit BCD format.
FirmwareBuildNum - returns the firmware build number, in binary format.
SuperframeCount - returns the current superframe count. The count increments every 64 hops.
RSSI_Idle - returns the last measurement of RSSI made during a time when the RF channel was idle.
Can be used to assess the noise floor or detect interferers.
RSSI_Last - returns the last measurement of RSSI made during the receipt of an RF packet with a valid
CRC. Can be used for network commissioning and diagnostic purposes.
CurrTxPower - returns the current transmitter power setting of a remote, allowing the automatic power
setting to be tracked. This parameter is the nominal output power setting in dBm, and is a 2’s complement
value. Note that the CurrTxPower parameter value returned from a base or repeater is not valid.
Page 52

Page 51 of 90
CCT900
CurrAttemptLimit - this returns the value of ARQ_AttemptLimit currently in use (depending on the selected
ARQ_Mode, it may not always match the local EEPROM value).
CurrRangeDelay - returns the current propagation delay for this remote as measured from the base
(applies to remote nodes only).
FirmwareBuildDate - date of firmware build in MM/DD/YY format.
FirmwareBuildTime - time of firmware build in HH:MM:SS format.
ModelNumber - DNT model number parameter, 0x01 = DNT900, 0x02 = CCT900.
CurrBaseModeNetID - returns the current base-mode network ID.
AveRXPwrOvHopSeq - returns the average beacon power received over the last tree-routing hop
sequence.
ParentACKQual - returns the number of transmission sent before and ACK is received, multiplied by 4.
4.2.4 Bank 3 - Serial and SPI Settings
Size in
Bank Loc'n Name R/W bytes Range Default
0x03 0x00 SerialRate R/W 2 1..384 0x0030 (9.6 kb/s)
0x03 0x02 SerialParams R/W 1 0..7 0x00 (8N1)
0x03 0x03 SerialControls R/W 1 0..7 0X07
0x03 0x04 SPI_Mode R/W 1 0..2 0x00 (SPI disabled)
0x03 0x05 SPI_Divisor R/W 1 1..2
7
0x0A (80.64 kb/s)
0x03 0x06 SPI_Options R/W 1 0..3 0x00 (standard SPI configuration)
0x03 0x07 SPI_MasterCmdLen R/W 1 0..2
5
0x00
0x03 0x08 SPI_MasterCmdStr R/W 32 ASCII all 0x00 bytes
SerialRate - sets the serial rate divisor according to the following formula:
Serial rate in b/s = 460800/SerialRate
Serial rate division settings for commonly used baud rates are:
Setting Serial rate
0x0001 460.8 kb/s
0x0002 230.4 kb/s
0x0004 115.2 kb/s
0x0006 76.8 kb/s
0x0008 57.6 kb/s
0x000C 38.4 kb/s
0x0010 28.8 kb/s
0x0018 19.2 kb/s
0x0030 9.6 kb/s (default)
0x0060 4.8 kb/s
0x00C0 2.4 kb/s
0x0180 1.2 kb/s
SerialParams - sets the serial mode options for parity and stop bits:
Setting Mode
0x00 No parity, 8 data bits, 1 stop bit (default)
0x01 No parity, 8 data bits, 2 stop bits
0x02 Reserved
0x03 Reserved
Page 53

Page 52 of 90
CCT900
0x04 Even parity, 8 data bits, 1 stop bit
0x05 Even parity, 8 data bits, 2 stop bits
0x06 Odd parity, 8 data bits, 1 stop bit
0x07 Odd parity, 8 data bits, 2 stop bits
Note that 8-bit data with no parity is capable of carrying 7-bit data with parity for compatibility without loss
of generality for legacy applications that may require it.
SerialControls - this parameter affects the way the radio responds to the various serial control lines.
Enabling or disabling response to some serial control signals can facilitate communicating with devices
that support only a reduced serial interface. The parameter is defined as a bitmask, with the following
options:
bits 7..3 Reserved
bit 2 Base /DCD mode:
1 = The base will only assert /DCD when at least one remote is registered (default).
0 = The base always asserts /DCD, regardless of whether any remotes are attached.
bit 1 /HOST_RTS enable:
1 = Radio will respond to changes on the /HOST_RTS control line (default).
0 = Radio ignores the /HOST_RTS pin and assumes flow control is always asserted.
bit 0 SLEEP/DTR enable.
1 = Radio will respond to changes on the SLEEP Pin (default)
0 = Radio ignores the SLEEP Pin and is always in the awake state.
SPI_Mode - this register enables and configures SPI port operation. When SPI functions are enabled, the
primary serial (UART) port operation is disabled in SPI Slave mode and restricted in SPI Master mode.
The diagnostic serial port continues to operate normally. Note that only protocol formatted messages can
be used when a CCT900 is configured for SPI operation. SPI_Mode has the following settings:
Setting Mode
0x00 SPI disabled - serial UART mode (default)
0x01 SPI Slave mode
0x02 SPI Master mode
When a CCT900 is configured for SPI Slave mode operation, all messages are routed through the SPI
port in lieu of the primary serial (UART) port. The /HOST_CTS signal provides the same flow control
function for the MOSI input that it provides for the RADIO_RXD serial input. The Master (host) can clock
transmit messages into the CCT900 SPI Slave whenever /HOST_CTS is set to a logic low state. The
Master can also complete clocking a protocol formatted transmit message into the CCT900 if
/HOST_CTS switches high part way through the message, but must then stop inputting transmit messages until the CCT900 resets /HOST_CTS to a logic low state.
In order for the Master to receive data from a CCT900 SPI Slave, it must clock bytes into the CCT900.
These bytes may be message bytes and/or 0x00 null bytes. The CCT900 will return null bytes on the
MISO output until the CCT900 receives a packet. The received message will then be clocked out. GPIO4
can be alternately configured to provide an SPI RX data available flag, SPI_RX_AVL, to signal when the
CCT900 slave is holding a received message(s). See Section 2.13 for additional information. In SPI Slave
mode, the maximum continuous SPI clock rate supported is 80.64 kb/s. The Master (host) clock rate
should closely match the CCT900 SPI clock rate setting for best data transfer efficiency. See the
SPI_Divisor description below.
In SPI slave mode, de-asserting and then asserting the /SS line resets the CCT900 SPI port on a byte
boundary. The /SS line can be toggled this way between every byte to assure bit streams into and out of
the SPI port remain byte framed. Less frequent /SS line toggling is also acceptable in most applications. It
is recommended that /SS be toggled at the start and end of each transmit message, and after no more
than 256 null bytes when clocking to output a received message. The /SS line should also be toggled at
Page 54

Page 53 of 90
CCT900
the end of each received message. Figure 4.2.4.1 shows a typical relation ship between the /SS line (red
trace) and the SCLK line (blue trace).
Figure 4.2.4.1
When periodic I/O reporting is enabled on a CCT900 remote configured as an SPI Master, the remote will
clock out a stored command string, SPI_MasterCmdStr, to collect data from a Slave peripheral each time
the I/O report timer fires. The collected data is then transmitted to the base as a TXData message.
Alternatively, a host connected to the base can transmit an SPI command as a TXData message to the
remote. The remote will clock the command into its Slave peripheral and transmit back the Slave’s response. In either case, the command string and response string are limited to 32 bytes. Only data messages are routed through the CCT900’s SPI port in Master mode. Command packets and command
replies are routed through the primary serial port.
When configured as an SPI Master, the CCT900 sets /SS low one SPI bit period before the start of message clocking and sets /SS high after clocking the last message bit. When the CCT900 is operating in SPI
Slave mode, the Master (host) must set /SS low at least one SPI bit period before clocking data in/out of
the CCT900. See the SPI_Divisor description below.
Changes to the SPI_Mode setting must be saved and the CCT900 reset to take effect. This avoids the
possibility of setting SPI mode inadvertently and being unable to communicate with the CCT900 to switch
it back to serial mode. If the /CFG pin is grounded at power up, the SPI_Mode setting is overridden and
the CCT900 will start up in serial (UART) mode.
SPI_Divisor - this parameter sets the clock rate in SPI Master mode and clock rate related timing, such as
/SS sampling, in Slave mode. The SPI rate is set according to the following formula:
SPI rate in b/s = 806400/SPI_Divisor
The valid range for SPI_Divisor is 1 to 127, providing SPI rates from 6.35 to 80.64 kb/s. For best data
transfer efficiency in Slave mode, the Master (host) clock rate should closely match the CCT900 SPI data
rate setting.
SPI_Options - this parameter sets the clock options for the SPI modes:
Setting Clock Option
0x00 Normal operation
0x01 Second clock edge
0x02 High idle clock polarity
0x03 Second clock edge with high idle clock polarity
Page 55

Page 54 of 90
CCT900
SPI_MasterCmdLen - this parameter sets the length for the SPI Master command string that will be used
to interrogate the slave peripheral, when SPI Master mode is selected with periodic I/O reporting enabled.
SPI_MasterCmdStr - this parameter holds the SPI Master command string that is used to interrogate the
slave peripheral when SPI Master mode is selected with periodic I/O reporting enabled.
4.2.5 Bank 4 - Host Protocol Settings
Size in
Bank Loc'n Name R/W bytes Range Default; Options
0x04 0x00 ProtocolMode R/W 1 0..1 0 = transparent; 1 = protocol
0x04 0x01 ProtocolOptions R/W 1 0..255 0x05
0x04 0x02 TxTimeout R/W 1 0..255 0x00 (no timeout)
0x04 0x03 MinPacketLength R/W 1 1..255 1 byte
0x04 0x04 AnnounceOptions R/W 1 0..7 0x07 all enabled
0x04 0x05 TransLinkAnnEn R/W 1 0..1 0 = disabled; 1 = <LINK> announce
0x04 0x06 ProtocolSequenceEn R/W 1 0..2 0 = disabled; 1 = startup, 2 = anytime
0x04 0x07 TransPtToPtMode R/W 1 0..1 0 = multipoint, 1 = point-to-point
0x04 0x08 MaxPktsPerHop R/W 1 0..3 0x03
ProtocolMode - this parameter selects the host protocol mode. The default is 0, which is transparent
mode, meaning the radio conveys whatever characters that are sent to it transparently, without requiring
the host to understand or conform to the CCT900's built-in protocol. This setting is recommended for
point-to-point applications for legacy applications such as wire replacements where another serial protocol may already exist. Setting this parameter to 1 enables the CCT900 host protocol, which is recommended for point-to-multipoint applications and is preferred for new designs. It is not necessary to define
the same protocol mode for all radios in a network. For example, it is frequently useful to configure all the
remotes for transparent mode and the base for protocol mode. Note that it is possible for the host to
switch the radio from transparent mode to protocol mode and back if desired by transmitting an Enter-
ProtocolMode command.
ProtocolOptions - this is a bitmask that selects various options for the protocol mode. The default is 0x05.
bits 7..3 Reserved
bit 2 Enable output of TxReply packets
bit 1 Reserved
bit 0 Enable output of Announce packets
AnnounceOptions - this is a bitmask that enables/disables different types of Announce packets:
bit 7..3 Reserved
bit 2 Enable bit for Announce types E0-EA (error notification)
bit 1 Enable bit for Announce types A1-A7 (<LINK> notifications)
bit 0 Enable bit for Announce types A0 (initialization)
TxTimeout - this parameter is the transmit timeout used for determining message boundaries in transpar-
ent data mode. Units are in milliseconds. A message boundary is determined whenever a gap between
consecutive characters is equal to or greater than the TxTimeout value, or the number of bytes reaches
the MinPacketLength. Either condition will trigger a transmission. The default TxTimeout value is 0 ms.
MinPacketLength - sets the minimum message length used for determining packet boundaries in transparent data mode. The default is one byte. A transmission is triggered when either the number of bytes
reaches MinPacketLength or a gap is detected between consecutive characters greater than TxTimout.
TransLinkAnnEn - enables a link announcement function for transparent mode. Whenever link is acquired
or dropped, the strings "<LINK>" or "<DROP>" are sent to the local host.
Page 56

Page 55 of 90
CCT900
ProtocolSequenceEn - enables or disables the EnterProtocolMode ASCII command string to switch from
transparent mode to protocol mode. Valid settings are 0 = disabled, 1 = one time at startup, 2 = enabled
at any time. The default is enabled at anytime. Note that if this parameter is set to 0 and saved to
memory, protocol mode can no longer be invoked through the radio’s main serial port or SPI connection.
In this case, protocol mode must be invoked using the module’s /CFG hardware input or by an over-theair command addressed to the radio.
TransPtToPtMode- controls the behavior for addressing packets in transparent mode. When this setting is
zero (default), in transparent mode the base will direct packets to the broadcast address. This is useful for
point-to-multipoint where the base is sending data to multiple remotes, for instance in applications where
a wireless link is replacing an RS-485 serial bus. When this setting is one, in transparent mode the base
will direct packets to the last remote that registered with it. This is useful for point-to-point networks where
there are only two endpoints, for instance in applications where a simple serial cable is being replaced.
MaxPktsPerHop - this parameter sets a limit on the maximum number of packets a radio can send on
each frequency hop. The default value is 3, the range is 1 to 3.
4.2.6 Bank 5 - I/O Peripheral Registers
Size in Range
Bank Loc'n Name R/W bytes in bits Default
0x05 0x00 GPIO0 R/W 1 1 0
0x05 0x01 GPIO1 R/W 1 1 0
0x05 0x02 GPIO2 R/W 1 1 0
0x05 0x03 GPIO3 R/W 1 1 0
0x05 0x04 GPIO4 R/W 1 1 0
0x05 0x05 GPIO5 R/W 1 1 0
0x05 0x06 ADC0 R 2 10 N/A
0x05 0x08 ADC1 R 2 10 N/A
0x05 0x0A ADC2 R 2 10 N/A
0x05 0x0C Event Flags R 2 10 N/A
0x05 0x0E PWM0 R/W 2 9 0
0x05 0x10 PWM1 R/W 2 9 0
GPIO0..5 - writing to these registers sets the corresponding driver for pins that are enabled outputs.
Reading these registers returns the current level detected on the corresponding pins.
ADC0..2 - read-only, returns the current 10-bit ADC reading for the selected register. See the discussion
of the ADC_SampleIntvl parameter below.
EventFlags - used with the automatic I/O reporting feature, this parameter indicates which I/O events
have been triggered since the last report message:
bits 15..8 Reserved
bit 7 ADC2 high/low threshold excursion
bit 6 ADC1 high/low threshold excursion
bit 5 ADC0 high/low threshold excursion
bit 4 Periodic timer report
bit 3 GPIO3 edge transition
bit 2 GPIO2 edge transition
bit 1 GPIO1 edge transition
bit 0 GPIO0 edge transition
PWM0..1 - sets the PWM (DAC) outputs. The DC voltage derived from the integrated low-pass filters on
the PWM output provides an effective DAC resolution of 7 bits (8 bits achievable with external filtering).
The range of this parameter is 0x0000 to 0x00FF.
Page 57

Page 56 of 90
CCT900
4.2.7 Bank 6 - I/O Setup
Size in Range
Bank Loc'n Name R/W bytes in bits Default; Options
0x06 0x00 GPIO_Dir R/W 1 6 0 (all inputs)
0x06 0x01 GPIO_Init R/W 1 6 0 (all zeros)
0x06 0x02 GPIO_Alt R/W 1 6 0x08 = use GPIO3 for RS485 enable
0x06 0x03 GPIO_Edge Trigger R/W 1 8 0x00
0x06 0x04 GPIO_SleepMode R/W 1 1 0 = off; 1 = use sleep I/O states
0x06 0x05 GPIO_SleepDir R/W 1 6 0 (all inputs)
0x06 0x06 GPIO_SleepState R/W 1 6 0 (all zeros)
0x06 0x07 PWM0_Init R/W 2 10 0x0000
0x06 0x09 PWM1_Init R/W 2 10 0x0000
0x06 0x0B ADC_SampleIntvl R/W 2 16 0x0001 (10 ms)
0x06 0x0D ADC0 ThresholdLo R/W 2 10 0x0000
0x06 0x0F ADC0_ThresholdHi R/W 2 10 0x03FF
0x06 0x11 ADC1_ThresholdLo R/W 2 10 0x0000
0x06 0x13 ADC1_ThresholdHi R/W 2 10 0x03FF
0x06 0x15 ADC2_ThresholdLo R/W 2 10 0x0000
0x06 0x17 AC2_ThresholdHi R/W 2 10 0x03FF
0x06 0x19 IO_ReportTrigger R/W 1 0..1 0x01 (GPIO0)
0x06 0x1A IO_ReportInterval R/W 4 32 0x00000BB8 (every 30 seconds)
0x06 0x1E IO_ReportPreDel R/W 1 8 0x00
0x06 0x1F IO_ReportRepeat R/W 1 8 0x01
GPIO_Dir - this parameter is a bitmask that sets whether the GPIOs are inputs (0) or outputs (1). The
default is all inputs.
GPIO_Init - this parameter is a bitmask that sets the initial value for any GPIOs which are enabled as
outputs.
GPIO_Alt - this parameter is a bitmask to select alternate functions for GPIO3, GPIO4 and GPIO5 as
shown below:
Bit Alternate function
3 GPIO3 functions as an RS-485 driver enable output
4 GPIO4 functions as an SPI_RX_AVL (SPI RX data available) flag
5 GPIO5 functions as an antenna diversity control output
GPIO_EdgeTrigger - when GPIO triggers are enabled for automatic I/O reporting, this function controls
the trigger behavior:
bits 7..6 GPIO3 edge function
bits 5..4 GPIO2 edge function
bits 3..2 GPIO1 edge function
bits 1..0 GPIO0 edge function
The bit values for each GPIO map to the following settings:
Value
GPIO edge behavior
11
Rising edge trigger, neither level keeps remote awake
10
Bidirectional edge trigger, neither level keeps remote awake
01
Rising edge trigger, holding high keeps remote awake
00
Falling edge trigger, holding low keeps remote awake
GPIO_SleepMode - this parameter is a bitmask that enables configuring the I/O direction and state of
GPIO0..GPIO5 when the module is sleeping. Bits 0..5 correspond to GPIO0..GPIO5. Setting a Gpio-
SleepMode bit to 1 enables sleep mode configuration of the corresponding GPIO. Setting a GpioSleepMode bit to 0 causes the corresponding GPIO to remain configured as in active mode. Note that when the
Page 58

Page 57 of 90
CCT900
GpioAlt bit is set for GPIO4, the corresponding GpioSleepMode bit is ignored and GPIO4 is controlled
directly by the GpioSleepState parameter bit 7.
GPIO_SleepDir - when GPIO_SleepMode is enabled, this parameter functions as a secondary GPIO_Dir
to set the direction of the GPIOs during a device’s sleep period. This enables the user to provide alternate
configurations during sleep that will help minimize current consumption. Bits 0..5 correspond to GPIO0..
GPIO5. Set a GPIO_SleepDir bit to 1 to specify an output, or to 0 to specify an input.
GPIO_SleepState - when GPIO_SleepMode is enabled, this parameter functions as a bitmask to control
the states of the GPIOs, the RADIO_TXD output, and the /HOST_CTS and /DCD outputs during a device’s sleep period. This allows the user to set alternate configurations during sleep to minimize current
consumption. Bits 0..5 correspond to GPIO0..GPIO5 respectively. Bit 6 sets the state of RADIO_TXD,
and bit 7 sets the states of /HOST_CTS and /DCD. A sleep state bit is set to 1 to specify a high output, or
to 0 to specify a low output. Bit 6 must be set low in order to achieve minimum sleep current (high impedance load assumed), and the other bits may need to be set low or high depending on their external loads.
When bit 6 is set low, expect a serial “break” condition to occur as the module wakes from sleep. The
serial break condition can be eliminated by setting bit 6 high, but sleep current will be increased.
PWM0_Init - this parameter sets the initial value for PWM0 at startup.
PWM1_Init - this parameter sets the initial value for PWM1 at startup.
ADC_SampleIntvl - this parameter sets the interval between the beginning of one ADC read cycle and the
next ADC read cycle. The three ADC inputs are read on each ADC read cycle. Each ADC_SampleIntvl
count equals 10 ms. This interval will be the worst-case latency for ADC generated interrupts. This interval is independent of the IO_ReportInterval as the ADCs will be read again on that interval.
ADC0..2_ThresholdLo/Hi - these values define thresholds to trigger an I/O report based on ADC measurements. If I/O reporting is enabled, a single EVENT report containing the contents of the I/O bank is
generated when a threshold is crossed. Reporting is "edge-triggered" with respect to threshold boundaries, not "level-triggered"; i.e., if the measurement remains there, additional reports are not triggered until
the value crosses the threshold again. The thresholds are met whenever one of the following inequalities
are satisfied:
ADCx < ADCx_ThresholdLo
ADCx > ADCx_ThresholdHi
IO_ReportTrigger - when a selected trigger source is enabled, a trigger event will cause the remote to
send an EVENT message to its base containing the entire current values of the I/O Register Bank from
GPIO0 up to and including the EventFlags, but not the PWM settings which are output-only.
bit 7 ADC2 high/low thresholds
bit 6 ADC1 high/low thresholds
bit 5 ADC0 high/low thresholds
bit 4 Periodic report timer
bit 3 GPIO3 edge
bit 2 GPIO2 edge
bit 1 GPIO1 edge
bit 0 GPIO0 edge
I/O reporting is supported for remotes only, not the base.
Page 59

Page 58 of 90
CCT900
IO_ReportInterval - when periodic I/O reporting is enabled, this parameter sets the interval between
reports. Units are 10 ms increments, and the default report interval is every 30 seconds but can be set as
long as 497 days.
IO_ReportPreDel - this parameter sets the delay in milliseconds between an event trigger and the time
the I/O register bank is read and sent in an EVENT report.
IO_ReportRepeat - this parameter sets the number of times the I/O register bank is read and resent as an
EVENT report following an event trigger. The default parameter value is 1, causing the EVENT report to
be sent once.
4.2.8 Bank 7 - Authentication List
Size in
Bank Loc'n Name R/W bytes
0x07 0x00 ApprovedAddr0 R/W 3
0x07 0x03 ApprovedAddr1 R/W 3
0x07 0x06 ApprovedAddr2 R/W 3
0x07 0x09 ApprovedAddr3 R/W 3
0x07 0x0C ApprovedAddr4 R/W 3
0x07 0x0F ApprovedAddr5 R/W 3
0x07 0x12 ApprovedAddr6 R/W 3
0x07 0x15 ApprovedAddr7 R/W 3
0x07 0x18 ApprovedAddr8 R/W 3
0x07 0x1B ApprovedAddr9 R/W 3
0x07 0x1E ApprovedAddr10 R/W 3
0x07 0x21 ApprovedAddr11 R/W 3
0x07 0x24 ApprovedAddr12 R/W 3
0x07 0x27 ApprovedAddr13 R/W 3
0x07 0x2A ApprovedAddr14 R/W 3
0x07 0x2D ApprovedAddr15 R/W 3
ApprovedAdd0..15 - the three-byte parameters in Bank 7 are the MAC addresses of the remotes authorized to join the network. The addresses are entered in little-endian format such that a radio with MAC
address 012345 would be entered 0x452301.
4.2.9 Bank 8 - Tree-Routing Active Router ID Table
Size in
Bank Loc'n Name R/W bytes
0x08 0x00 Base NetworkID (0x00) R 1
0x08 0x01 ParentNetworkID1 R 1
to
0x08 0x3F ParentNetworkID63 R 1
ParentNetID0..63 - this set of parameters contains the tree-routing active router ID table maintained by a
base for its system. It describes the organization of all active routers in the system. This table is used by
the base and the routers to determine which direction to send a packet. The base updates the information
in the routing table from the heartbeat packets it receives from the routers in the system, and broadcasts
the routing table periodically to inform all devices in the system of the current system configuration.
4.2.10 Bank 9 - Registered MAC Addresses
Size in
Bank Loc'n Name R/W bytes
0x09 0x00 RegMACAddr0 R 15
to
0x09 0x19 RegMACAddr25 R 15
Page 60

Page 59 of 90
CCT900
RegMACAddr0..25 - this bank holds the MAC addresses of all radios registered to a base or router. Up to
126 MAC addresses can be registered. Each bank parameter can hold up to five MAC addresses, with
each MAC address containing three bytes are in little-Endian order. Three-byte segments in a parameter
not holding a MAC address with hold a null address: 0x00 0x00 0x00. Note that unlike parameters in
other banks, the bank offset used in get commands is by parameter rather than by byte. Only one Bank 9
parameter can be retrieved at a time with a get command. In a remote, this bank will contain only null
addresses.
4.2.11 Bank FF - Special Functions
This bank contains three user functions, UcReset, SleepModeOverride and MemorySave:
Size in
Bank Loc'n Name R/W bytes Range Description
0xFF 0x00 UcReset W 1 0..90 0x00 = reset, 0x5A = reset with factory defaults
0xFF 0x0C SleepModeOverride R/W 1 0..2 0 = inactive, 1 = stay awake, 2 = cancel stay awake
0xFF 0x1C RoutingTableUpd R/W 1 0..255 0x14 (20 seconds)
0xFF 0x20 DiagSerialRate R/W 2 0..384 0x000C (38.4 kb.s)
0xFF 0xFF MemorySave W 1 0..2 0x00 = load factory defaults, 0x01 = save settings
to EEPROM, 0x02 = save settings and reset
UcReset - writing a value of 0x00 to this location forces a software reset of the microcontroller. This will
enable those changes which require a reset. If this is written to before 0x01 is written to the MemorySave
parameter, the last parameter values saved before the reset will be in effect. A reply packet, either local
or over-the-air, may not be received when writing a value to this register. Writing 0x5A to this location will
reset the radio and load the factory default settings. This is equivalent to writing 0x00 to UcReset followed
by writing 0x00 to MemorySave. Note that 0x01 must be written to MemorySave to save the retrieved
factory defaults.
SleepModeOverride - when remotes are operating in sleep mode, writing 0x01 to the location will cause
the remotes to stay awake. Writing 0x00 to this location causes the remotes to resume sleeping in
10 seconds. Writing 0x02 to this location causes the remotes to resume sleeping immediately (subject to
their configuration).
RoutingTableUpd - this parameter is the interval in seconds for the base station to broadcast the treerouting table to its system. The default interval is 20 seconds.
DiagSerialRate - sets the diagnostic port serial rate divisor according to the following formula:
Serial rate in b/s = 460800/DiagSerialRate
Serial rate division settings for commonly used baud rates are:
Setting Serial rate
0x0000 460.8 kb/s
0x0001 460.8 kb/s
0x0002 230.4 kb/s
0x0004 115.2 kb/s
0x0006 76.8 kb/s
0x0008 57.6 kb/s
0x000C 38.4 kb/s (default)
0x0010 28.8 kb/s
0x0018 19.2 kb/s
Page 61

Page 60 of 90
CCT900
0x0030 9.6 kb/s
0x0060 4.8 kb/s
0x00C0 2.4 kb/s
0x0180 1.2 kb/s
Note that if a value of 0x0000 is specified, the maximum data rate of 460.8 kb/s will be selected.
MemorySave - writing 0x00 to this location clears all registers back to factory defaults. Writing a 0x01 to
this location commits the current register settings to EEPROM. Writing 0x02 to this location saves the
current setting to EEPROM and forces a software reset. When programming registers, all changes are
considered temporary until an 0x01 or 0x02 command is executed.
4.2.12 Protocol Mode Configuration Example
In this example, the host configures the base to transmit 10 dBm (10 mW) of RF power using the
SetRegister command, 0x04. The TxPower parameter is stored in bank 0x00, register 0x18. A one-byte
parameter value of 0x01 selects the 10 dBm (10 mW) power level. The protocol formatting for the command is:
0xFB 0x05 0x04 0x18 0x00 0x01 0x01
Note the order of the bytes in the command argument: register, bank, span, parameter value. When the
base receives the command it updates the parameter setting and return a SetRegisterReply message as
follows:
0xFB 0x01 0x14
In order for this new RF power setting to persist through a base power down, MemorySave must be
invoked. This is done by setting a one-byte parameter in register 0xFF of bank 0xFF to 0x01 with another
SetRegister command:
0xFB 0x05 0x04 0xFF 0xFF 0x01 0x01
The base will write the current parameter values to EEPROM and return a SetRegisterReply message:
0xFB 0x01 0x14
4.2.13 Protocol Mode Sensor Message Example
In this example, the base host requests an ADC1 reading from a remote using the GetRemoteRegister
command, 0x0A. The MAC address of the remote is 0x000102. The current ADC1 measurement is read
from register 0x08 in bank 0x05. The ADC reading spans two bytes. The protocol formatting for this
command is:
0xFB 0x07 0x0A 0x02 0x01 0x00 0x08 0x05 0x02
Note the remote MAC address 0x000102 is entered in Little-Endian byte order, 0x02 0x01 0x00. The
ADC reading is returned in a GetRemoteRegisterReply message:
0xFB 0x0B 0x1A 0x00 0x02 0x01 0x00 0xC4 0x08 0x05 0x02 0xFF 0x02
Substantial information is returned in the message. The last two byes of the message give the ADC
reading in Little-Endian format, 0xFF 0x02. The ADC reading is thus 0x02FF. The RSSI value is the byte
following the address, 0xC4 (-60 dBm). The TxStatus byte to the right of the GetRemoteRegisterReply
Packet Type is 0x00, showing the packet was acknowledged on the RF channel.
Page 62

Page 61 of 90
CCT900
4.2.14 Protocol Mode Event Message Example
In this example, the IO_ReportInterval is set to 10 seconds and the periodic report timer bit in the
IO_ReportTrigger parameter is set on the remote, with MAC address 0x123456. This causes event mes-
sages to be sent from this remote every 10 seconds. The IO_ReportInterval and the IO_ReportTrigger
parameters are loaded using SetRemoteRegister commands. The command to set the IO_ReportInterval
to 10 seconds is:
0xFB 0x0B 0x0B 0x56 0x34 0x12 0x1A 0x06 0x04 0xE8 0x03 0x00 0x00
The IO_ReportInterval parameter starts in location 0x1A of bank 0x06. The report interval is set in 10 ms
units, so a 10 second report interval is 1000 units or 0x000003E8 (Little-Endian format E8 03 00 00). The
IO_ReportInterval parameter is updated and SetRemoteRegisterReply is returned:
0xFB 0x06 0x1B 0x00 0x56 0x34 0x12 0xC4
The command to set the periodic report timer bit in IO_ReportTrigger to is:
0xFB 0x08 0x0B 0x56 0x34 0x12 0x19 0x06 0x01 0x10
The periodic report timer bit in IO_ReportTrigger is located in bit position four (00010000b) or 0x10. The
IO_ReportTrigger parameter is updated and SetRemoteRegisterReply is returned:
0xFB 0x06 0x1B 0x00 0x56 0x34 0x12 0xC4
The remote will start sending event messages on 10 second intervals as shown in the log records below:
FB 16 28 56 34 12 CB 00 05 0E 01 00 00 00 01 01 F9 01 DF 01 C9 01 10 00
FB 16 28 56 34 12 B6 00 05 0E 01 00 00 00 01 01 F8 01 DF 01 CC 01 10 00
FB 16 28 56 34 12 B3 00 05 0E 01 00 00 00 01 01 F8 01 E0 01 CC 01 10 00
FB 16 28 56 34 12 B1 00 05 0E 01 00 00 00 01 01 F9 01 DF 01 C9 01 10 00
FB 16 28 56 34 12 AE 00 05 0E 01 00 00 00 01 01 F9 01 DF 01 C8 01 10 00
FB 16 28 56 34 12 AD 00 05 0E 01 00 00 00 01 01 F9 01 E1 01 CF 01 10 00
IO_ReportTrigger generates RxEvent messages (PktType 0x28). The message payload consists of the
first 14 bytes in Bank 5, including the state of GPIO0 through GPIO5, the input voltages measured by
ADC0 through ADC2, and the state of the event flags. Note the ADC readings and the event flags are
presented in Little-Endian order.
Page 63

Page 62 of 90
CCT900
5.0 CCT900DK Developer’s Kit
Figure 5.0.1 shows the main contents of a CCT900DK Developer’s kit:
Figure 5.0.1
5.1 CCT900DK Kit Contents
Two CCT900 radios installed in DNT interface boards (labeled Base and Remote)
Two installed U.FL coaxial jumper cables and two 2 dBi dipole antennas
Two 9 V wall-plug power suppliers, 120/240 VAC, plus two 9 V batteries (not show above)
Two RJ-45/DB-9F cable assemblies, one RJ-11/DB-9F cable assembly, two A/B USB cables
One CCT900DK documentation and software CD
5.2 Additional Items Needed
To operate the kit, the following additional items are needed:
One PC with Microsoft Windows XP or Vista Operating System. The PC must be equipped with a
USB port or a serial port capable of operation at 9.6 kb/s.
5.3 Developer’s Kit Operational Notes:
CCT900DK kits are preconfigured to run at a 500 kb/s RF data rate with 1 mW of RF transmitter power.
Due to the high sensitivity of the CCT900 radio module which provides its exceptional range, if the RF
transmit power is increased from the default 1 mW, the CCT900 nodes must be separated by a minimum
of 6 feet for 10 mW or 25 feet at 63 mW in order to reliably link.
Page 64

Page 63 of 90
CCT900
5.4 Developer’s Kit Default Operating Configuration
The default operating configuration of the CCT900DK developer’s kit is TDMA Mode 2, point-to-point, with
transparent serial data at 9.6 kb/s, 8N1. One CCT900 is preconfigured as a base and the other as a
remote. Labels on the bottom of the interface boards specify Base or Remote. The defaults can be overridden to test other operating configurations using the DNT Demo utility discussed in Section 5.5. The
default RF power setting is 0 dBm (1 mW), which is suitable for operation at a spacing of about 2 m (6 ft).
The RF power level should be set higher as needed for longer range operation. Note that setting the RF
power to a high level when doing testing at 2 m can overload the CCT900 receiver and cause erratic
operation. See Section 5.3.
5.5 Developer’s Kit Hardware Assembly
Observe ESD precautions when handling the kit circuit boards. The components that make up a development board are shipped with the CCT900 radios and U.FL coax jumper cables installed in the interface
board. If a CCT900 radio and/or the U.FL jumper cable has been unplugged after receipt, confirm the
CCT900 is correctly plugged into its interface board with the radio oriented so that its U.FL connector is
next to the U.FL connector on the interface board. Also check the radio’s alignment in the socket on the
interface board. No pins should be hanging out over the ends of the connector. Next, install the dipole
antennas.
Page 65

Page 64 of 90
CCT900
As shown in Figure 5.5.1, there is a jumper on pins J14. This jumper can be removed and a current meter
connected across J14 to measure just the CCT900’s current consumption during operation.
Figure 5.5.1
Page 66

Page 65 of 90
CCT900
There are three serial connectors on the interface boards. The RJ-45 connector provides a high-speed
RS232 interface to the CCT900’s main serial port. The USB connector provides an optional interface to
the radio’s main serial port. The RJ-11 connector provides a high-speed RS232 interface to the radio’s
diagnostic port. The DNT Demo utility program runs on the radio’s main port.
Many desktop PCs have a built-in serial port capable of operation at 9.6 kb/s. The kit can be run satisfactorily at the 9.6 kb/s data rate, but not at its fastest throughput. Use the RJ-45 to DB-9F cable assemblies
for serial port operation.
Optionally, the kit development boards can be run from USB ports. Plugging in the USB cable automatically switches operation from the RJ-45 connector. The USB interface is based on an FT232RL serial-toUSB converter IC manufactured by FTDI. The FT232RL driver files are located in the i386 and AMD64
folders on the kit CD, and the latest version of the drivers can downloaded from the FTDI website,
www.ftdichip.com. The drivers create a virtual COM port on the PC. Power the Base using one of the
supplied wall-plug power supplies. Next connect the Base to the PC with a USB cable. The PC will find
the new USB hardware and open a driver installation dialog box. Enter the letter of the drive holding the
kit CD and click Continue. The installation dialog will run twice to complete the FT232R driver installation.
5.6 DNT Demo Utility Program
The DNT Demo utility requires only one PC for initial kit operation and sensor applications (ADC, PWM
and digital I/O). Two serial/USB ports are required for bidirectional serial communications. Section 5.6.1
below covers using the DNT Demo utility for initial kit operation and familiarization. Section 5.6.2 covers
serial message communication and radio configuration.
Page 67

Page 66 of 90
CCT900
5.6.1 Initial Kit Operation
Create a file folder on the PC and copy the contents of the kit CD into the folder.
The DNT Demo utility program runs on the radio’s main port. The preferred PC interface is a serial port
capable of operating at 9.6 kb/s or faster. As discussed above, the USB interface can also be used.
Connect the Base to the PC and power up the Base and the Remote development boards using the wallplug power supplies.
The DNT Demo utility program is located in the PC Programs folder. The DNT Demo requires no
installation and can be simply copied to the PC and run. Start the DNT Demo on the PC. The start-up
window is shown in Figure 5.6.1.1.
Figure 5.6.1.1
Page 68

Page 67 of 90
CCT900
Click on Connect to open the Select Comm Port Settings dialog box, as shown in Figure 5.6.1.2. Set the
baud rate to 9600 (9.6 kb/s). Set the CommPort to match the serial port connected to the Base, either the
hardware port or the USB virtual serial port. Then click OK to activate the serial connection.
Figure 5.6.1.2
At this point the Demo will collect data from the Base, filling in data in the Local Radio column on the
Demo window. The Status Window should also show that the Remote has joined the Base. Click on the
drop-down box at the top of the Radio 1 column and select the MAC Address for the Remote. Next press
the Start button using the default 1 second Refresh Delay.
The Demo will display updated data on the Remote in the Radio 1 column, including bar graphs of RSSI
signal strength in dBm and percent packet success rate. Adjusting the large pot on the Remote can be
observed on the Potentiometer (ADC1) row.
To perform serial data loop back testing with the kit, move the two jumpers on the Remote board labeled
Ext_TX and Ext_RX to connect the center and right header pins. This disconnects the module's TX and
RX pins from the USB and RS-232C circuits. Use a banana clip or other short jumper to connect together
the two pins on the header labeled J11 (Ext_MICRO). Attempting loop back testing by connecting Pins 2
and 3 of the DB9 serial connector can cause erratic behavior due to noise coupling from the serial TX and
RX lines into the weakly pulled up flow control lines on the board.
In order to turn off the DCD LED (D4) on the development board in sleep mode, the GPIO_ SleepState
parameter in the CCT900 has been set to 0xC0 rather than the factory default value of 0x00. If the
CCT900 is reset to its factory defaults, the DCD LED with remain on in sleep mode until the GPIO_
SleepState is set to 0xC0. See Section 4.2.7 for additional information on the GPIO_SleepState
parameter.
If any difficulty is encountered in setting up the CCT900DK development kit, contact MURATA’s module
technical support group. The phone number is +1.678.684.2000. Phone support is available from 8:30 AM
to 5:30 PM US Eastern Time Zone, Monday through Friday. The E-mail address is
tech_sup@Murata.com.
Page 69

Page 68 of 90
CCT900
5.6.2 Serial Communication and Radio Configuration
Connect PCs to both the Base and the Remote for serial communication testing. Click the Stop button
under the Refresh Delay label on the I/O Tools tab and move to the Transmit Tools tab, as shown in
Figure 5.6.2.1.
Figure 5.6.2.1
Pressing the Transmit button on this screen sends the message in the Data to Transmit text box to the
selected MAC Address. Note that the MAC address a remote uses for the base is always 0x000000.
Data sent to the local radio is displayed in the Received Data text box. Received data can be displayed
as ASCII (default) or in Hexadecimal format by checking the Hex Mode check box. When the Transmit
Interval is set to zero, Data to Transmit is sent once when the Transmit button is clicked. When the
Transmit Interval is set to a positive number, Pressing the Transmit button once will cause a transmission
each transmit interval (seconds) until the button is pressed again.
Page 70

Page 69 of 90
CCT900
Returning to the I/O Tools tab, the multi-tab Configuration window for each radio can be accessed by
clicking on its Config button. The data presented on the first six tabs corresponds to configuration register
Banks 0 through 5 as discussed in Section 4.2 above, with the data on the next two tabs corresponding to
configuration register Bank 6, the data on the next tab corresponding to Bank 7, the data on the following
two tabs corresponding to Bank 8, and the data on the last tab corresponding to Bank 9.
Figure 5.6.2.2
The Transceiver Setup Tab is shown in Figure 5.6.2.2 and corresponds to Bank 0. The current values of
each Bank 0 parameter are displayed and can be updated by selecting from the drop-down menus or
entering data from the keyboard, and then pressing the Apply Changes button. Note that data is
displayed and entered in Big-Endian order. The Demo automatically reorders multi-byte data to and from
Little-Endian order when building or interpreting messages.
Figure 5.6.2.3
Figure 5.6.2.3 shows the System tab contents, corresponding to Bank 1. The current values of each
parameter are displayed and can be updated by selecting from the drop-down menus or entering data
Page 71

Page 70 of 90
CCT900
from the keyboard, and then pressing the Apply Changes button. Note that Bank 1 holds configuration
parameters for the base only except for ARQ_Mode, which applies to both the base and the remotes.
Figure 5.6.2.4
Figure 5.6.2.4 shows the Status tab contents, corresponding to Bank 2. Note the Status tab contains
read-only parameters.
Figure 5.6.2.5
Figure 5.6.2.5 shows the Serial tab contents corresponding to Bank 3. The values shown are the defaults
for serial port operation.
Page 72

Page 71 of 90
CCT900
Figure 5.6.2.6
Figure 5.6.2.6 shows the Protocol tab contents, corresponding to Bank 4. Transparent data serial communication is currently chosen.
Figure 5.6.2.7
Figure 5.6.2.7 shows the I/O Peripherals tab contents, corresponding to Bank 5. GPIO ports 1 through 5
are logic low, GPIO port 0 is logic high. The 10-bit ADC input readings and PWM output settings are
given in Big-Endian byte order. Event flags are presented on the right side of the window.
Page 73

Page 72 of 90
CCT900
Figure 5.6.2.8
Figure 5.6.2.8 shows the first I/O Setup tab contents, corresponding to Bank 6 GPIO parameters. This tab
allows the direction of the GPIO ports to be set both for active and sleep modes, and in the case of GPIO
outputs, the initial power up states and sleep mode states to be set. When GPIO ports 0 - 3 are configured as inputs, event interrupts can be set for them with check boxes. The type of interrupt trigger is
selected from the drop-down boxes to the right of the check boxes. GPIO alternate function, periodic I/O
reporting, reporting interval and enable/disable sleep I/O states can also be specified under this tab.
Figure 5.6.2.9
Figure 5.6.2.9 shows the second I/O Setup tab contents, corresponding to Bank 6 ADC input and PWM
output parameters. The ADC sampling interval, high and low thresholds for event reporting and event
reporting triggers on each ADC channel can be set, along with the start-up output values for each PWM
(DAC) channel. The event reporting predelay and repeat count parameters can also be set from this tab.
Page 74

Page 73 of 90
CCT900
Figure 5.6.2.10
Figure 5.6.2.10 shows the Auth List tab, where the MAC addresses of the remotes authorized to join the
network in AuthMode 1 are input into Bank 7.
Figure 5.6.2.11
Figure 5.6.2.11 shows the first Routing Table tab, which displays part of the contents of Bank 8. This
bank contains the tree-routing active router ID table, which is maintained by a base for its system. It
describes the organization of all active routers in the system. This table is used by the base and the
routers to determine which direction to send a packet.
Page 75

Page 74 of 90
CCT900
Figure 5.6.2.12
Figure 5.6.2.12 shows the second Routing Table tab, which displays the rest of the contents of Bank 8.
Figure 5.6.2.13
Figure 5.6.2.13 shows the Registered tab, which displays the first seven parameters in Bank 9. This bank
holds the MAC addresses of all radios registered to a base or router. Up to 126 MAC addresses can be
registered. Each bank parameter can hold up to five MAC addresses, with each MAC address containing
three bytes. Three-byte segments in a parameter not holding a MAC address with hold a null address:
0x000000. In a remote, this bank will contain only null addresses.
Page 76

Page 75 of 90
CCT900
5.7 DNT Wizard Utility Program
DNT Wizard is a complementary program to DNTDemo that emphasizes the details of serial communication between a CCT900 and its host computer. The DNT Wizard start-up window is shown in
Figure 5.7.1.
Figure 5.7.1
DNT Wizard uses three Function keys:
F1 toggles the SLEEP/DTR input to the CCT900 on and off. This allows the CCT900 to be reset.
F2 toggles the RTS input to the CCT900 on and off, providing manual flow control.
F6 toggles test transmissions on and off. The test message is “This is a test”.
DNT Wizard also includes the ability to log messages to and from the CCT900. This feature is especially
useful in confirming the format of protocol command and reply messages. Control of the log file is under
the View menu. Logging is enabled by default. The log file created is logfile.dat, and is in ASCII text
format. An example log is shown at the end of this section.
Page 77

Page 76 of 90
CCT900
Click on Connect to open the Select Comm Port Settings dialog box, as shown in Figure 5.7.2. Set the
baud rate to 9600 (9.6 kb/s). Set the CommPort to match the serial port connected to the Base, either the
hardware port or the USB virtual serial port. Then click OK to activate the serial connection.
Figure 5.7.2
At this point the Wizard will collect data from the Base, filling in data under Current Settings as shown in
Figure 5.7.3. The Status Window should also show that the Remote has joined the Base.
Figure 5.7.3
Page 78

Page 77 of 90
CCT900
There are three tabs on the DNT Wizard main window: Receive Data, Transmit Data and Wincom.
Figure 5.7.4
Received messages are displayed in the Receive Data tab, along with the MAC address of the sender
and the RSSI (signal strength) of the received message in dBm. See Figure 5.7.4.
Page 79

Page 78 of 90
CCT900
Figure 5.7.5
The Transmit Data tab is shown in Figure 5.7.5. The message to send is input in the Data to Transmit text
box. The address to send the message can be chosen or input in the MAC Addr drop-down box. Note
that the MAC address a remote uses for the base is always 0x000000. If the Transmit Interval is set
to 0, the message is sent once each time the Transmit button is clicked. When the Transmit Interval is set
to an integer greater than zero, the message will sent at the beginning of each interval until the Stop
button (was Transmit button) is clicked. The status of each transmission is shown below TX Data Reply.
Figure 5.7.5 shows that the transmitted message was ACKed, with the received signal strength of the
ACK -66 dBm.
Page 80

Page 79 of 90
CCT900
Figure 5.7.6
As shown in Figure 5.7.6, the Wincom tab provides the basic functionality of a serial terminal program.
Messages typed in are sent, and messages received are appended to the bottom of the on-screen text.
Page 81

Page 80 of 90
CCT900
The multi-tab Configuration window is accessed by clicking on its Config button. The data presented on
the first six tabs corresponds to configuration register Banks 0 through 5 as discussed in Section 4.2
above, with the data on the next two tabs corresponding to configuration register Bank 6, the data on the
next tab corresponding to Bank 7, the data on the following two tabs corresponding to Bank 8, and the
data on the last tab corresponding to Bank 9.
Figure 5.7.7
The Configuration window in the DNT Wizard is identical the Configuration window in the DNT Demo. See
Figures 5.6.2.2 through 5.6.2.13 for Configuration window details.
Page 82

Page 81 of 90
CCT900
Details of the File, View and Tools menus are shown in Figure 5.7.8.
Figure 5.7.8
The Tools menu contains two very useful items. Packet Builder opens the window shown in Figure 5.7.9.
On the left, the Packet Type drop-down box provides a selection of all packet types used in the CCT900
protocol. On the right, the reply packet types are presented.
Figure 5.7.9
Figure 5.7.10
Page 83

Page 82 of 90
CCT900
Figure 5.7.10 shows the Raw Packet and Raw Packet Reply tabs. Components of the protocol messages
are shown in hexadecimal format.
Log Data controls the log file. Logging is enabled by default. The log file created is logfile.dat, and is in
ASCII text format. An example log is shown below:
New Data-----------------------------------------8/12/2009 | 3:50:24 PM
DNTWizard Version 1.04
Sent Data : FB 07 00 44 4E 54 35 30 30 (Enter Protocol Mode)
Recv Data : FB 01 10 (Enter Protocol Mode Reply)
Sent Data : FB 04 03 00 00 31 (Get Register)
Recv Data : FB 35 13 00 00 31 01 FF CB 00 FF 2A 2A 2A 2A 2A 2A 2A 2A 2A 2A 2A 2A 2A 2A 2A 2A 00
05 32 00 00 02 02 44 4E 54 32 34 30 30 00 00 00 00 00 00 00 00 00 0A 00 00 00 00 (Get Register
Reply)
Recv Data : FB 06 15 01 FF FF FF 7F (TX Data Reply)
Sent Data : FB 04 03 00 01 10 (Get Register)
Recv Data : FB 14 13 00 01 10 FF 02 32 05 01 08 04 03 0A 45 0C 32 14 00 00 10 (Get Register
Reply)
Sent Data : FB 04 03 00 02 28 (Get Register)
Recv Data : FB 2C 13 00 02 28 9B 00 00 00 00 00 00 04 F3 00 00 FF 41 17 02 01 1B 01 98 00 00 08
00 30 38 2F 31 31 2F 30 39 31 37 3A 30 33 3A 30 33 02 (Get Register Reply)
Sent Data : FB 04 03 00 03 04 (Get Register)
Recv Data : FB 08 13 00 03 04 30 00 00 07 (Get Register Reply)
Sent Data : FB 04 03 00 04 08 (Get Register)
Recv Data : FB 0C 13 00 04 08 00 05 00 01 07 00 02 00 (Get Register Reply)
Sent Data : FB 04 03 00 05 12 (Get Register)
Recv Data : FB 16 13 00 05 12 01 00 00 00 00 00 19 02 78 02 1D 02 00 00 00 00 00 00 (Get Register
Reply)
Sent Data : FB 04 03 00 06 1E (Get Register)
Recv Data : FB 22 13 00 06 1E 00 00 00 01 00 00 C0 00 00 00 00 01 00 00 00 FF 03 00 00 FF 03 00
00 FF 03 01 B8 0B 00 00 (Get Register Reply)
Sent Data : FB 04 03 00 07 30 (Get Register)
Recv Data : FB 34 13 00 07 30 FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF (Get Register
Reply)
Recv Data : FB 07 27 A2 9C 00 00 01 00 (Announce)
Recv Data : FB 13 26 9C 00 00 CC 54 68 69 73 20 69 73 20 61 20 74 65 73 74 (RX Data)
Recv Data : FB 13 26 9C 00 00 D0 54 68 69 73 20 69 73 20 61 20 74 65 73 74 (RX Data)
Recv Data : FB 13 26 9C 00 00 CD 54 68 69 73 20 69 73 20 61 20 74 65 73 74 (RX Data)
Recv Data : FB 13 26 9C 00 00 D4 54 68 69 73 20 69 73 20 61 20 74 65 73 74 (RX Data)
Recv Data : FB 13 26 9C 00 00 D9 54 68 69 73 20 69 73 20 61 20 74 65 73 74 (RX Data)
Recv Data : FB 13 26 9C 00 00 D5 54 68 69 73 20 69 73 20 61 20 74 65 73 74 (RX Data)
Sent Data : FB 01 01
(Exit Protocol Mode)
Recv Data : FB 01 11 (Exit Protocol Mode Reply)
The log file is especially useful in confirming the format of specific protocol commands and replies.
Page 84

Page 83 of 90
CCT900
5.8 CCT900 Interface Board Features
Amber DCD LED D4 illuminates on a remote to indicate it is registered with the base and can participate
in RF communications. DCD LED D4 illuminates on the base when one or more remotes are registered to
it, unless the base has been configured to assert DCD on power up. In this case it will be on as long as
the dev board is powered. Green Activity LED D1 illuminates when transmitting or receiving RF data. Red
Receive LED D3 illuminates when sending received data through the serial port to the PC. Green Transmit LED D2 illuminates when the PC sends data through the serial port to be transmitted. Jumper pin set
J14 is provided to allow measurement of the CCT900 current. For normal operation J14 has a shorting
plug installed.
Page 85

Page 84 of 90
CCT900
Jumper pin sets J12 and J13 normally have shorting plugs installed as shown in Figure 5.8.2, which
connects the CCT900 RADIO_TXD and RADIO_RXD pins to the respective serial data lines on the
evaluation board. It is possible to connect directly to RADIO_TXD and RADIO_RXD by moving the jumpers over. In this case, J11-1 is the input for transmitted data and J11-2 is the output for received data.
Note this a 3 V logic interface. Placing a shorting plug on jumper pin set J6 allows the CCT900 to be
powered up in boot loader mode. This is used for factory code loads and functional testing. The CCT900
has its own boot loader utility that allows the protocol firmware to be installed with a terminal program that
supports YMODEM. Pin strip J7 provides access to various CCT900 pins as shown on the silkscreen.
Pressing switch SW2 will reset the CCT900.
Pressing switch SW1 switches GPIO0 from logic high to logic low. Pin strip J8 provides access to various
CCT900 pins as shown on the silkscreen. The wiper of pot R10 drives the input of ADC1. Clockwise
rotation of the pot wiper increases the voltage. Thermistor RT1 is part of a voltage divider that drives
ADC0. LED D5 illuminates when GPIO1 is set as a logic high output. LED D10 illuminates when GPIO3 is
set as a logic high. The CCT900 interface board includes a 5 V regulator to regulate the input from the 9
V wall-plug power supply. Note: do not attempt to use the 9 V wall-plug power supply to power the
CCT900 directly. The maximum allowed voltage input to the CCT900 is 5.5 V.
Page 86

Page 85 of 90
CCT900
6.0 Demonstration Procedure
The procedure below provides a quick demonstration of the CCT900 using a CCT900DK
development kit:
1. Confirm that each CCT900 transceiver is installed correctly in an interface board, and that the
U.FL jumpers between the CCT900 radios and the interface boards are installed. Also confirm
that a dipole antenna is installed on each interface board, and that J14 has a jumper block installed on each interface board. See Figures 5.4.1, 5.4.2 and 5.4.3 above.
2. Attach the Base (see label on bottom of interface board) to a computer with the DNT Demo
program installed.
3. Place the transceiver/interface boards at least 6 feet (two meters) apart.
4. Start the DNT Demo program.
5. Click the Connect button on the Demo window. This will open a serial port setup dialog box. Set
the baud rate to 9600 (9.6 kb/s) and select the COM port where the Base is connected.
6. At this point the Demo will collect data from the Base, filling in data in the Local Radio column on
the Demo window. The Status Window should also show that the Remote has joined the Base.
7. Click on the drop-down box at the top of the Radio 1 column and select the MAC Address for the
Remote. Next press the Start button using the default 1 s Refresh Delay.
8. The Demo will display updated data on the Remote in the Radio 1 column, including bar graphs
of RSSI signal strength in dBm and percent packet success rate. Adjusting the large pot on the
Remote can be observed on the Potentiometer (ADC1) row.
Page 87

Page 86 of 90
CCT900
7.0 Troubleshooting
CCT900 not responding - make sure SLEEP/DTR is not asserted (logic low) to bring the radio out of
sleep mode.
Can not enter protocol mode - make sure the host data rate is correct. The CCT900 defaults to 9.6 kb/s. If
using the EnterProtocolMode command, send the complete protocol format for this command.
A remote never detects carrier (DCD) - check that the base is running, and that the remote InitialNwkID
parameter is the same as the base, or is set to 0xFF. If a remote is operating near the base (less than 6 ft
or 2 m), be sure the transmitter power setting on both the base and remote is set to 1 mW. If the remote is
operating far from the base, be sure the transmitter power setting on the base and remote is adequate for
communication. Also make sure that the security keys are the same.
Carrier is detected, but no data appears to be received - make sure that RTS is asserted to enable receive character flow. Make sure the RF transmit power is not on a high settings if the nodes are close
together.
Range is extremely limited - this is usually a sign of a poor antenna connection or the wrong antenna.
Check that the antenna is firmly connected. If possible, remove any obstructions near the antenna.
Transmitting terminal flashes (drops) CTS occasionally - this indicates that the transmit buffer is filling up.
This most often is caused by using a higher serial port data rate than RF data rate. Adjusting the protocol
parameters may increase the network efficiency.
7.1 Diagnostic Port Commands
FSTAT <option> - enables a frequency-ordered channel activity status log.
Available options are:
0 - off
1 - on
For either a base or remote, FSTAT shows the DataTx (data packet transmitted), AckRx (ACK received)
and RegRx (registration or renewal request or reply received) activity status on each frequency with
ASCII characters as follows:
‘.’ (0x2E) - no activity
‘1’ (0x31) - DataTx activity only
‘2’ (0x32) - AckRx activity only
‘3’ (0x33) - DataTx and AckRx activity
‘4’ (0x34) - RegRx activity only
‘5’ (0x35) - DataTx and RegRx activity
‘6’ (0x36) - AckRx and RegRx activity
‘7’ (0x37) - DataTx, AckRx and RegRx activity
Page 88

Page 87 of 90
CCT900
A sample FSTAT output for 37 channel operation is shown below. The status data is order from the
lowest operating frequency on the left to the highest operating frequency on the right. An ASCII CR-LF
terminates each line. On most frequencies, DataTx and AckRx occur on the same frequency (‘3’). Occasionally there is DataTx, AckRx and RegRx activity (‘7’), DataTx only activity (‘1’), or no activity (‘.’).
333333 33333333 33333373 33333333 3333333
333333 33333333 33333333 33333333 3333333
333333 31333333 33333333 33333333 3333333
23.333 333133.3 3.333323 31333.33 333.333
333333 23333331 33313333 33333333 23.3333
INSTR <option>
Available options are:
0 - off
1 - on
For either a base or a remote, INSTR streams instrumentation packets including a time stamp and seven
data values. The time stamp is a string of four characters. The first three characters are ASCII representations of hexadecimal numbers. The fourth character is a ‘>’ character. Each time stamp count is 100 µs.
The time stamp rolls over to 0x000 after count 0xCE5. The content of the seven data values are detailed
below. ASCII representations of the hexadecimal value of each byte are output, separated by space
characters:
Byte 0: current channel, 0 to 36
Byte 1: same data as FSTAT 1, except no activity is 0x30
Byte 2: RSSI_Last, RSSI of last RF packet received in dBm, 8-bit signed value
Byte 3: RSSI_Idle, most recent RSSI value on a channel with no expected activity
Byte 4: Range delay estimate, remote only, 3.1 µs/tick
Byte 5: Status bits 1
b7.. b4 - reserved
b3 - inbound data RF flow control, 1 = device has disabled RF flow
b2 - outbound data RF flow control, 1 = base has disabled RF flow
b1 - /HOST_CTS, status of CTS line, 1 = hold
b0 - /DCD, link LED on; on a remote indicates registration with base, on the base it indicates at least on remote is registered (default)
Byte 6: Status bits 0
b7 - CSMA channel busy
b6 - Parser/CRC error
b5 - valid RF packet received (any type)
b4 - DataRx, data packet received
b3 - RegTx, registration or renewal request or reply transmitted
b2 - RegRx, registration or renewal request or reply received
b1 - AckRx, ACK received
b0 - DataTx, data packet transmitted
Page 89

Page 88 of 90
CCT900
A sample INSTR output is shown below.
896> 21 01 DA 98 00 01 01
940> 0A 03 DA 9C 00 01 23
9E2> 1D 03 DA 99 00 03 23
A8A> 1E 01 D6 9F 00 03 21
B36> 11 03 D6 99 00 03 23
Looking a the first line in detail:
896> 21 01 DA 98 00 01 01
The time stamp is 0x896>
Byte 0, 0x21, indicates the channel of operation is 33 (decimal)
Byte 1, 0x01, is the same status data as FSTAT data above. In this case, DataTx activity only.
Byte 2, 0xDA, is the last RSSI value, -38 dBm
Byte 3, 0x98, is the RSSI idle value, -100 dBm
Byte 4, 0x00, is the range delay estimate (remote only). The remote is very close to the base.
Byte 5, 0x01, provides the serial port status - /HOST_CTS is high
Byte 6, 0x01, provides the communication status - DataTx active only. Note that this byte provides additional status bytes compared to byte index 1.
Page 90

Page 89 of 90
CCT900
8.0 Appendices
8.1 Ordering Information
CCT900: transceiver module for pin-socket mounting
8.2 Technical Support
For CCT900 technical support call MURATA at (678) 684-2000 between the hours of 8:30 AM and 5:30
PM Eastern Time.
Page 91

www.Murata.com Technical support +1.678.684.2000 Page 90 of 90
© 2009-2011 by RF Monolithics, Inc. E-mail: tech_sup@murata.com CCT900 Integration Guide - 07/14/11
9.0 Warranty
Seller warrants solely to Buyer that the goods delivered hereunder shall be free from defects in materials
and workmanship, when given normal, proper and intended usage, for twelve (12) months from the date
of delivery to Buyer. Seller agrees to repair or replace at its option and without cost to Buyer all defective
goods sold hereunder, provided that Buyer has given Seller written notice of such warranty claim within
such warranty period. All goods returned to Seller for repair or replacement must be sent freight prepaid
to Seller’s plant, provided that Buyer first obtain from Seller a Return Goods Authorization before any
such return. Seller shall have no obligation to make repairs or replacements which are required by normal
wear and tear, or which result, in whole or in part, from catastrophe, fault or negligence of Buyer, or from
improper or unauthorized use of the goods, or use of the goods in a manner for which they are not designed, or by causes external to the goods such as, but not limited to, power failure. No suit or action
shall be brought against Seller more than twelve (12) months after the related cause of action has occurred. Buyer has not relied and shall not rely on any oral representation regarding the goods sold hereunder, and any oral representation shall not bind Seller and shall not be a part of any warranty.
THE PROVISIONS OF THE FOREGOING WARRANTY ARE IN LIEU OF ANY OTHER WARRANTY,
WHETHER EXPRESS OR IMPLIED, WRITTEN OR ORAL (INCLUDING ANY WARRANTY OR
MERCHANT ABILITY OR FITNESS FOR A PARTICULAR PURPOSE). SELLER’S LIABILITY ARISING
OUT OF THE MANUFACTURE, SALE OR SUPPLYING OF THE GOODS OR THEIR USE OR
DISPOSITION, WHETHER BASED UPON WARRANTY, CONTRACT, TORT OR OTHERWISE, SHALL
NOT EXCEED THE ACTUAL PURCHASE PRICE PAID BY BUYER FOR THE GOODS. IN NO EVENT
SHALL SELLER BE LIABLE TO BUYER OR ANY OTHER PERSON OR ENTITY FOR SPECIAL,
INCIDENTAL OR CONSEQUENTIAL DAMAGES, INCLUDING, BUT NOT LIMITED TO, LOSS OF
PROFITS, LOSS OF DATA OR LOSS OF USE DAMAGES ARISING OUT OF THE MANUFACTURE,
SALE OR SUPPLYING OF THE GOODS. THE FOREGOING WARRANTY EXTENDS TO BUYER
ONLY AND SHALL NOT BE APPLICABLE TO ANY OTHER PERSON OR ENTITY INCLUDING,
WITHOUT LIMITATION, CUSTOMERS OF BUYERS.
Field Code Changed
Field Code Changed
 Loading...
Loading...