

Murata Electronics North America 2410M Users Guide
WIT2410
y
2.4GHz Spread Spectrum
Wireless Industrial Transceiver
Integration Guide
June 15, 1999
One Meca Wa
Norcross, Georgia 30093
www.digital-wireless.com
(770) 564-5540
Note: This device has not been authorized
as required by the rules of the Federal
Communications Commission. This device
is not, and may not be, offered for sale or
lease, or sold or leased, until authorization
is obtained.
About This Manual
This manual is designed to allow integration of the Digital Wireless Corporation WIT2410 OEM
module into complete products. Care has been taken to try and make sure all of the information
in this manual is accurate. However, specifications can change over time and Digital Wireless
cannot guarantee the accuracy of this information. If you have any questions on any information
in this manual, please contact Digital Wireless Technical Support at (770) 564-5540.

TABLE OF CONTENTS
1. INTRODUCTION..................................................................................................................................1
1.1 Why Spread Spectrum?.....................................................................................................................1
1.2 Frequency Hopping vs. Direct Sequence.........................................................................................2
2. RADIO OPERATION............................................................................................................................4
2.1. Synchronization and Registration...................................................................................................4
2.2. Data Transmission...........................................................................................................................5
2.2.1. Point-to-Point ........................................................................................................................5
2.2.2. Point-to-Multipoint................................................................................................................6
2.2.3. TDMA Mode.........................................................................................................................6
2.2.4. CSMA Mode .........................................................................................................................8
2.2.5. Full Duplex Communication.................................................................................................8
2.2.6. Error-free Packet Transmission Using ARQ.........................................................................8
2.3. Modes of Operation.........................................................................................................................9
2.3.1. Control and Data Modes........................................................................................................9
2.3.2. Sleep Mode..........................................................................................................................10
2.3.3. Low Power Mode and Duty Cycling...................................................................................10
3. PROTOCOL MODES..........................................................................................................................11
3.1. Packet Formats..............................................................................................................................12
3.1.1. Data Packet..........................................................................................................................13
3.1.3. Connect Packet....................................................................................................................13
3.1.4. Disconnect Packet (base only, receive only)......................................................................13
4. MODEM INTERFACE........................................................................................................................14
4.1. Interfacing to 5 Volt Systems........................................................................................................15
5. MODEM COMMANDS......................................................................................................................16
5.1. Serial Commands..........................................................................................................................16
5.2. Network Commands......................................................................................................................17
5.3. Protocol Commands......................................................................................................................19
5.4. Status Commands..........................................................................................................................21
5.5. Memory Commands......................................................................................................................22
5.6. Modem Command Summary........................................................................................................23
6. WIT2410 DEVELOPER’S KIT........................................................................................................... 24
6.1. COM24..........................................................................................................................................24
6.2. Demonstration Procedure..............................................................................................................25
6.3. Troubleshooting ............................................................................................................................26
7. APPENDICES......................................................................................................................................28
7.1. Technical Specifications ...............................................................................................................28
7.1.1. Power Specifications...........................................................................................................28
7.1.2. RF Specifications.................................................................................................................28
7.2.2. Mechanical Specifications...................................................................................................28
7.3. Serial Connector Pinouts...............................................................................................................29
7.4. Approved Antennas.......................................................................................................................29
7.5. Technical Support .........................................................................................................................29
7.6. Mechanical Drawing.....................................................................................................................30
7.7. Warranty........................................................................................................................................31

1. INTRODUCTION
The WIT2410 radio transceiver provides reliable wireless connectivity for either
point-to-point or multipoint applications. Frequency hopping spread spectrum technology
ensures maximum resistance to noise and multipath fading and robustness in the presence of
interfering signals, while operation in the 2.4 GHz ISM band allows license-free use and
worldwide compliance. A simple serial interface supports asynchronous data up to 230400
bps. An on-board 3 KB buffer and an error-correcting over-the-air protocol provide smooth
data flow and simplify the task of integration with existing applications.
- Multipath fading impervious
frequency hopping technology
with 75 frequency channels
(2401-2475 MHz).
- Supports point-to-point or
multipoint applications.
- Meets FCC rules 15.247 and ETS
300.328 for worldwide licensefree operation.
- Superior range to 802.11 wireless
LAN devices.
- Transparent ARQ protocol
w/3KB buffer ensures data
integrity.
- Digital addressing supports up to
32 networks, with 62 remotes per
network.
- Simple serial interface handles both
data and control at up to 230400
bps.
- Fast acquisition typically locks to
hopping pattern in 5 seconds or less.
- Selectable 10 mW or 100 mW
transmit power.
- Support for diversity antenna.
- Built-in data scrambling reduces
possibility of eavesdropping.
- Nonvolatile memory stores
configuration when powered off.
- Smart power management features
for low current consumption.
- Dynamic TDMA slot assignment
that maximizes throughput.
- Low power 3.3v CMOS signals
1.1 Why Spread Spectrum?
The radio transmission channel is very hostile, corrupted by noise, path loss and
interfering transmissions from other radios. Even in a pure interference-free
environment, radio performance faces serious degradation through a phenomenon
known as multipath fading. Multipath fading results when two or more reflected rays of
the transmitted signal arrive at the receiving antenna with opposing phase, thereby
partially or completely canceling the desired signal. This is a problem particularly
prevalent in indoor installations. In the frequency domain, a multipath fade can be
described as a frequency-selective notch that
shifts in location and intensity over time as
reflections change due to motion of the radio or objects within its range. At any given
time, multipath fades will typically occupy 1% - 2% of the 2.4 GHz band. This means
that from a probabilistic viewpoint, a conventional radio system faces a 1% - 2% chance
of signal impairment at any given time due to multipath.
© 1999 Digital Wireless Corporation 1 6/15/99
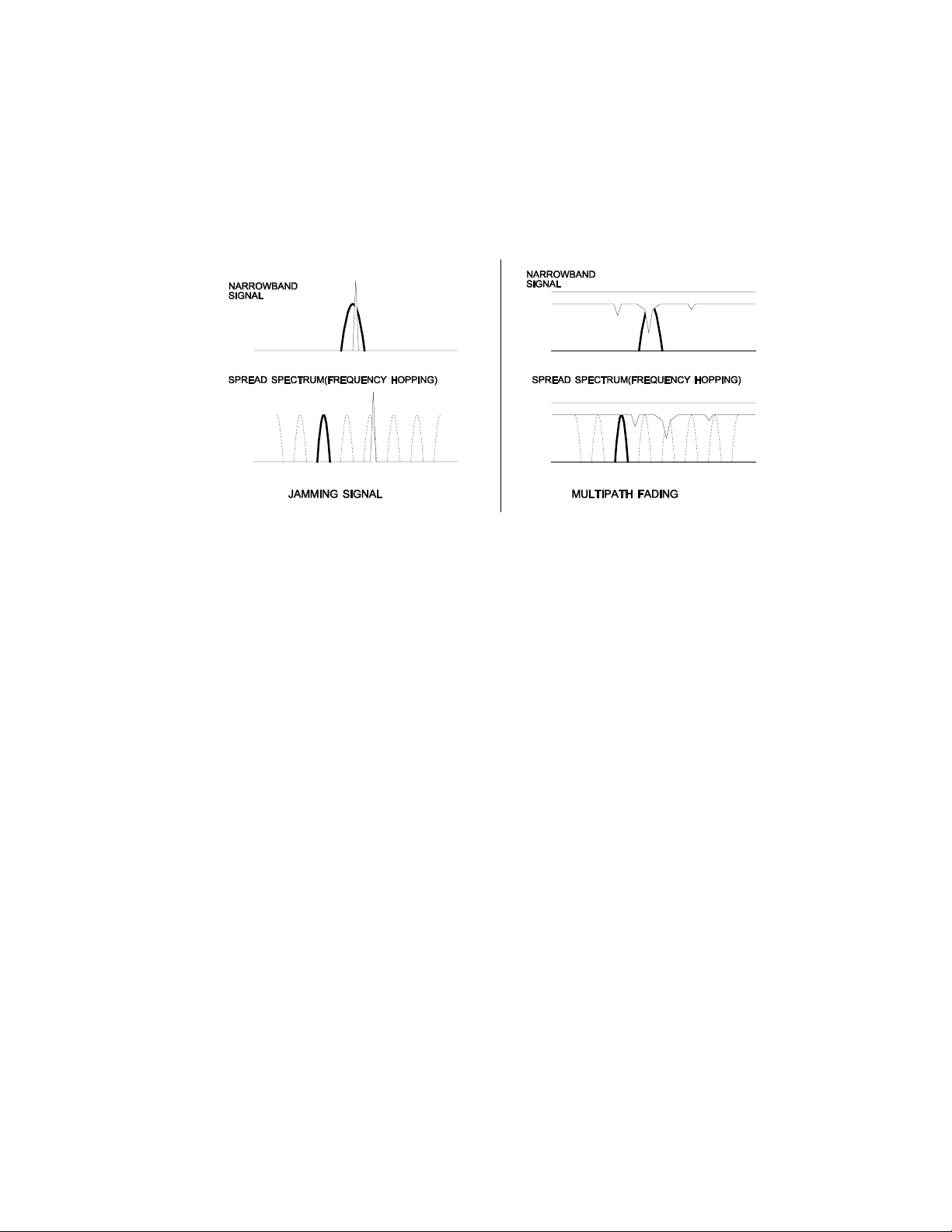
Spread spectrum reduces the vulnerability of a radio system to both interference from
jammers and multipath fading by distributing the transmitted signal over a larger region
of the frequency band than would otherwise be necessary to send the information. This
allows the signal to be reconstructed even though part of it may be lost or corrupted in
transit.
Figure 1
Narrowband vs. spread spectrum in the presence of interference
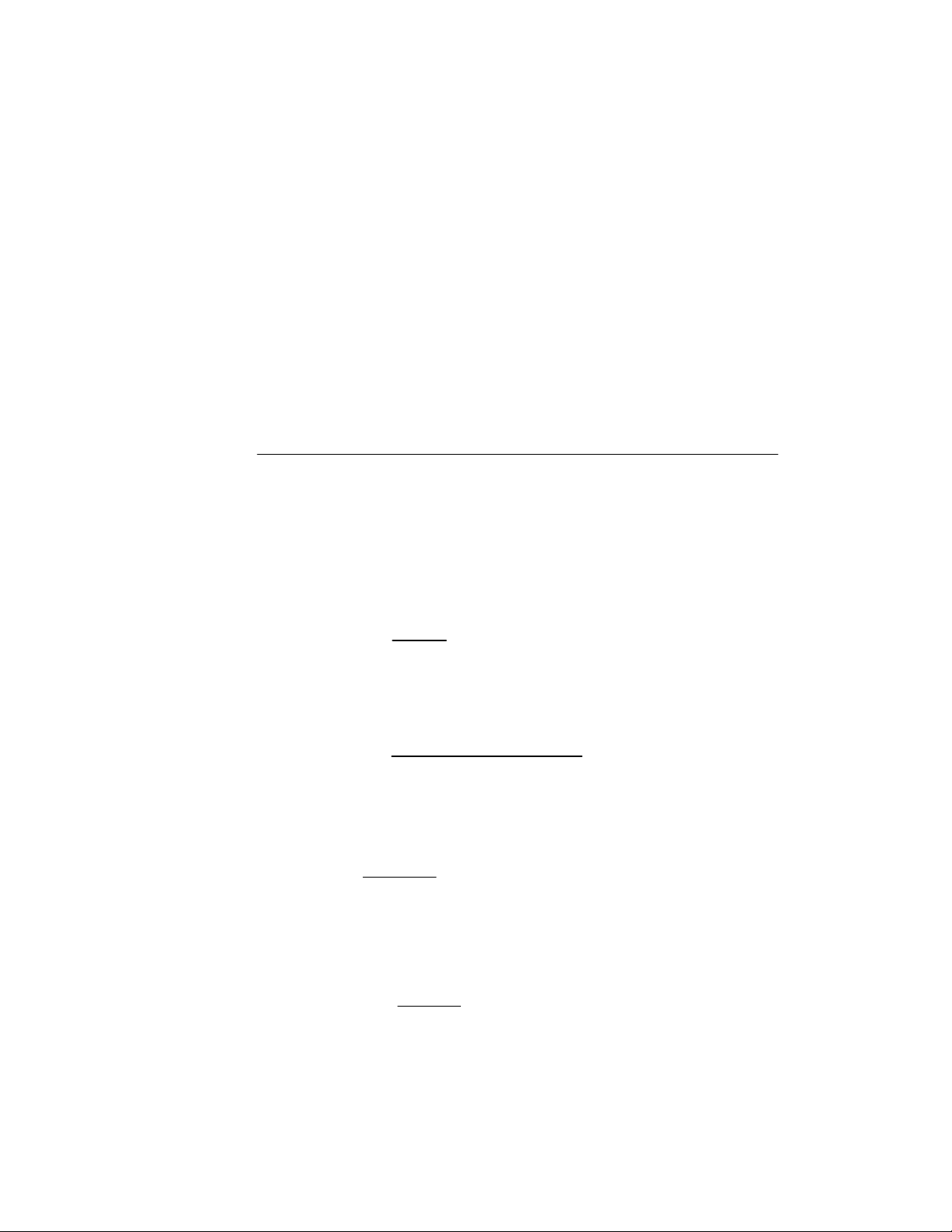
1.2 Frequency Hopping vs. Direct Sequence
The two primary approaches to spread spectrum are direct sequence (DS) and frequency
hopping (FH), either of which can generally be adapted to a given application. Direct
sequence spread spectrum is produced by multiplying the transmitted data stream by a
much faster, noise-like repeating pattern. The ratio by which this modulating pattern
exceeds the bit rate of the baseband data is called the processing gain, and is equal to the
amount of rejection the system affords against narrowband interference from multipath
and jammers. Transmitting the data signal as usual, but varying the carrier frequency
rapidly according to a pseudo-random pattern over a broad range of channels produces a
frequency hopping spectrum system.
© 1999 Digital Wireless Corporation 2 6/15/99

Figure 2
Forms of spread spectrum
One disadvantage of direct sequence systems is that due to spectrum constraints and the
design difficulties of broadband receivers, they generally employ only a minimal amount
of spreading (typically no more than the minimum required by the regulating agencies).
For this reason, the ability of DS systems to overcome fading and in-band jammers is
relatively weak. By contrast, FH systems are capable of probing the entire band if
necessary to find a channel free of interference. Essentially, this means that a FH
system will degrade gracefully as the channel gets noisier while a DS system may
exhibit uneven coverage or work well until a certain point and then give out completely.
Because it offers greater immunity to interfering signals, FH is often the preferred
choice for co-located systems. Since direct sequence signals are very wide, they tend to
offer few non-overlapping channels, whereas multiple hoppers may interleave with less
interference. Frequency hopping does carry some disadvantage in that as the transmitter
cycles through the hopping pattern it is nearly certain to visit a few blocked channels
where no data can be sent. If these channels are the same from trip to trip, they can be
memorized and avoided; unfortunately, this is generally not the case, as it may take
several seconds to completely cover the hop sequence during which time the multipath
delay profile may have changed substantially. To ensure seamless operation throughout
these outages, a hopping radio must be capable of buffering its data until a clear channel
can be found. A second consideration of frequency hopping systems is that they require
an initial acquisition period during which the receiver must lock on to the moving carrier
of the transmitter before any data can be sent, which typically takes several seconds. In
summary, frequency hopping systems generally feature greater coverage and channel
utilization than comparable direct sequence systems. Of course, other implementation
factors such as size, cost, power consumption and ease of implementation must also be
considered before a final radio design choice can be made.
As an additional benefit, RF spectrum has been set aside at 2.4 GHz in most countries
(including the U.S.) for the purpose of allowing compliant spread spectrum systems to
operate freely without the requirement of a site license. This regulatory convenience
alone has been a large motivation for the industry-wide move toward spread spectrum.
© 1999 Digital Wireless Corporation 3 6/15/99

2. RADIO OPERATION
2.1. Synchronization and Registration
As discussed above, frequency hopping radios periodically change the frequency at which
they transmit. In order for the other radios in the network to receive the transmission, they
must be listening to the frequency over which the current transmission is being sent. To do
this, all the radios in the net must be synchronized and must be set to the same hopping
pattern. All radios in a net must be set to the same hopping pattern before attempting to
communicate.
In point-to-point or point-to-multipoint arrangements, one radio module is designated as the
base station. All other radios are designated remotes. One of the responsibilities of the base
station is to transmit a synchronization signal to the remotes to allow them to synchronize
with the base station. Since the remotes know the hopping pattern, once they are
synchronized with the base station, they know which frequency to hop to and when. Every
time the base station hops to a different frequency, it immediately transmits a synchronizing
signal.
When a remote is powered on, it rapidly scans the frequency band for the synchronizing
signal. Since the base station is transmitting over 75 frequencies and the remote is scanning
75 frequencies, it can take several seconds for a remote to synch up with the base station.
Once a remote has synchronized with the base station, it must request registration from the
base station. The registration process identifies to the base station the remotes from which
transmissions will be received and not discarded. Registration also allows tracking of
remotes entering and leaving the network. The base station builds a table of serial numbers
of registered remotes. To improve efficiency, the 24-bit remote serial number is assigned a
6-bit “handle” number. Two of these are reserved for system use, thus each base station can
register 62 separate remotes. This handle is how user applications will know the remotes. If
necessary, the automatic handle assignment can be overridden to explicitly tie certain handles
to certain remotes. See the section on Network Commands for details on the Set Default
Handle command.
To detect if a remote has gone offline or out of range, the registration must be “renewed”
once every 256 hops. Registration is completely automatic and requires no user application
intervention. When the remote is registered, it will receive several network parameters from
the base. This allows the base to automatically update these network parameters in the
remotes over the air. Once a parameter has been changed in the base, it is automatically
changed in the remotes. The parameters automatically changed are hop duration, the duty
cycle and the multiple access mode, i.e., TDMA or CSMA.
At the beginning of each hop, the base station transmits a synchronizing signal. After the
synchronizing signal has been sent, the base will transmit any data in its buffer unless packet
transmit delay has been set. The packet transmit delay parameter allows for the transmission
of groups of continuous data in transparent mode (protocol mode 0). In TDMA mode the
© 1999 Digital Wireless Corporation 4 6/15/99

amount of data that the base station can transmit per hop is determined by the hop duration
and the number of remotes registered with the base. In CSMA mode, the maximum amount
of data sent is determined by maximum data length. In any event, the maximum amount of
data sent by a base station or remote per hop is 127 bytes. If there is no data to be sent, the
base station will not transmit until the next frequency.
The operation of the remotes depends on whether the remote is set up for TDMA mode or
CSMA mode. In TDMA mode, the operation of the remotes is the same as the base station
without the synchronization signal.
In CSMA mode, remotes compete on an ad hoc basis for transmission time. The likelihood
that a remote with will attempt to transmit immediately is affected by the persistence
parameter. If a collision is detected with another radio, the remote will wait a random period
of time before trying to retransmit. The backoff parameter controls the maximum time a
remote will wait before attempting to retransmit. Unregistered remotes can request
registration any time after the base station transmission. Refer to the section Protocol
Commands for details on the persistence and backoff parameters.
Except for the registration process which occurs only when a remote logs onto the network,
the whole procedure is repeated on every frequency hop. Refer to the section on Modem
Commands for complete details on parameters affecting the transmission of data.
2.2. Data Transmission
The WIT2410 supports two network configurations: point-to-point and point-to-multipoint.
In a point-to-point network, one radio is set up as the base station and the other radio is set up
as a remote. In a point-to-multipoint network, a star topology is used with the radio set up as
a base station acting as the central communications point and all other radios in the network
set up as remotes. In this configuration, all communications take place between the base
station and any one of the remotes. Remotes cannot communicate directly with each other.
It should be noted that point-to-point mode is a subset of point-to-multipoint mode and
therefore there is no need to specify one mode or the other.
2.2.1. Point-to-Point
In point-to-point mode, unless packet transmit delay has been set, the base station will
transmit whatever data is in its buffer limited to 127 bytes or by the length of the base slot
size. If the base station has more data than can be sent on one hop, the remaining data will be
sent on subsequent hops. In addition to the data, the base station adds some information to
the transmission over the RF link. It adds the address of the remote to which it is
transmitting, even though in a point-to-point mode there is only one remote. It also adds a
sequence number to identify the transmission to the remote. This is needed in the case of
acknowledging successful packets and retransmitting errored packets. Also added is a 24-bit
CRC to allow the base to check the received transmission for errors. When the remote
receives the transmission, it will acknowledge the transmission if it was received without
© 1999 Digital Wireless Corporation 5 6/15/99

errors. If no acknowledgment is received, the base station will retransmit the same packet on
the next frequency hop.
In point-to-point mode, a remote will transmit whatever data is in its buffer up to the limit of
its maximum packet length. If desired, a minimum packet length can also be set, which forces
the remote to wait until a certain amount of data is available or the specified packet transmit
delay is exceeded before transmitting. If the remote has more data than can be sent on one
hop, it will send as much data as possible as a packet, adding its own address, a packet
sequence number and 24-bit CRC. These additional bytes are transparent to the user
application if the protocol mode is 00 (which is the default). In the event a remote has more
data to send, the data will be sent on subsequent hops. If the packet is received by the base
station without errors, the base station will acknowledge the packet. If the remote does not
receive an acknowledgment, it will retransmit the packet on the next frequency hop. To the
user application, acknowledgments and retransmissions all take place behind the scenes
without the need for user intervention.
2.2.2. Point-to-Multipoint
In point-to-multipoint mode, data sent from the user application to the base station must be
packetized by the user application. This is necessary to identify the remote to which the base
station should send data. When the user packet is received by the remote, if the remote is in
transparent mode (protocol mode 0), the packetization bytes are stripped by the remote. In
this instance the remote host receives just data. If the remote is not in transparent mode, the
remote host will receive the appropriate packet header as specified by the remote’s protocol
mode. Refer to the section Protocol Modes for details on the various packet formats.
When a remote sends data to a base station in point-to-multipoint mode, the remote host does
not need to perform any packetization of the data. The remote will add address, sequence
and CRC bytes as in the point-to-point mode. When the base station receives the data, the
base station will add packetization header bytes according to its protocol mode setting.
2.2.3. TDMA Mode
For applications needing guaranteed bandwidth availability, the TDMA mode of the
WIT2410 can meet this requirement. This is the default mode of the WIT2410. In TDMA
mode, each remote has an assigned time slot during which it can transmit. The base station
time slot is set independently of the remote time slots through the Set Base Slot Size
command. The base station assigns each remote a time slot and informs the remotes of the
size of the time slot. All remote time slots are the same size which is determined by the
number of remotes registered with the base station. The slot size is a dynamic variable that
changes as the number of registered remotes changes. The remotes are continually updated
with the time slot size. This approach continually maximizes the data throughput. The base
station divides the amount of time available per hop by the number of registered remotes up
to a maximum of 16 times slots per hop. If the number of registered remotes is greater than
16, the time slots will be spread across the required number of hops. For networks with more
© 1999 Digital Wireless Corporation 6 6/15/99
than 16 possible remotes, the Set Duty Cycle command must be used to specify a duty cycle -
µ
- the number of hops over which the time slots must be spread. For 1 to 16 remotes, no duty
cycle is required; for 17 to 32 remotes a duty cycle of at least ½ is required; and for 33 to 62
remotes a duty cycle of ¼ or more is necessary. An added benefit of using the power save
mode to set a duty cycle is improved average current consumption efficiency. Refer to the
Status Commands section for details of this command.
When setting up a TDMA network, keep in mind that time slot length, maximum packet size
and hop duration are all interrelated. The hop duration parameter will determine the time
slot size and the maximum amount of data that can be transmitted per hop by the remotes.
There is a hard limit of the absolute maximum amount of data that can be sent on any given
hop of 212 bytes regardless of any parameters. The base station requires 1.7 ms overhead for
tuning, the synchronization signal and parameter updating, as well as a guard time of 500 us
between each remote slot. Thus the amount of time allocated per remote slot is roughly:
hop duration – base slot – 1.7ms - ( # of registered remotes-1)·500us
( # of registered remotes)
Take for example a network comprised of a base station and 10 remotes. A hop duration of
15 ms is chosen. We decide that the base station needs to be able to send up to 32 bytes each
hop (equivalent to a capacity for the base of ~ 21 kbps). Counting the 1.7 ms overhead for
the base packet and making use of the fact that our RF rate is 460.8 kbps, we determine that
the base slot requires approximately:
32·8
+ 1.7 ms = 2.3 ms
460.8kbps
Each remote time slot will be:
15 ms – 2.3 ms – (9)·0.5 ms
10
= 0.82 ms
From our RF data rate of 460.8kbps we see that it takes 17.36 µs to send a byte of data, so
each remote will be able to send up to
0.82 ms
17.36
= 47 bytes of data per hop.
s
Note that the 47 bytes is the actual number of data bytes that can be sent. If the WIT2410 is
using a protocol mode, the packet overhead does not need to be considered. So in this
example, the total capacity per remote would be:
47 bytes
= 25 kbps
15 ms
If we figure a minimum margin of safety for lost packets and retransmissions of about 20%,
we see that this would be more than sufficient to support 19.2 kbps of continuous data per
remote. It is also useful to remember that the asynchronous data input to the WIT2410 is
© 1999 Digital Wireless Corporation 7 6/15/99

stripped of its start and stop bits during transmission by the radio, yielding a "bonus" of 10/8
or 25% in additional capacity.
The above calculations are provided as a means of estimating the capacity of a multipoint
WIT2410 network. To determine the precise amount of capacity, you can actually set up the
radio system and then query the maximum packet length from one of the remotes in control
mode to discover its exact setting. Divide this number by the hop duration as above to get
the remote's exact capacity.
2.2.4. CSMA Mode
CSMA mode is not currently available for the WIT2410.
2.2.5. Full Duplex Communication
From an application perspective, the WIT2410 communicates in full duplex. That is, both
the user application and the remote terminal can be transmitting data without waiting for the
other to finish. At the radio level, the base station and remotes do not actually transmit at the
same time. If they did, the transmissions would collide. As discussed earlier, the base
station transmits a synchronization signal at the beginning of each hop followed by up to
three packets of data. After the base station transmission, the remotes will transmit. Each
base station and remote transmission may be just part of a complete transmission from the
user application or the remote terminal. Thus, from an application perspective, the radios are
communicating in full duplex mode since the base station will receive data from a remote
before completing a transmission to the remote.
2.2.6. Error-free Packet Transmission Using ARQ
The radio medium is a hostile environment for data transmission. In a typical office or
factory environment, 1% - 2% of the 2.4 GHz frequency band may be unusable at any given
time at any given station due to noise, interference or multipath fading. For narrowband
radio systems (and also many spread spectrum radio systems which use direct sequence
spreading), this would imply a loss of contact on average of over 30 seconds per hour per
station. The WIT2410 overcomes this problem by hopping rapidly throughout the band in a
pseudo-random pattern. If a message fails to get through on a particular channel, the
WIT2410 simply tries again on the next channel. Even if two thirds of the band are
unusable, the WIT2410 can still communicate reliably.
Data input to the WIT2410 is broken up by the radio into packets. A 24-bit checksum is
attached to each packet to verify that it was correctly received. If the packet is received
correctly, the receiving station sends an acknowledgment, or ACK, back to the transmitting
station. If the transmitter doesn't receive an ACK, at the next frequency hop it will attempt to
© 1999 Digital Wireless Corporation 8 6/15/99
 Loading...
Loading...