

Multiplex WINGSTABI-RX-12-DR pro, WINGSTABI-16, WINGSTABI-RX-16-DR pro, WINGSTABI-RX-9-DR M-LINK, WINGSTABI-12 Instruction Manual
...Page 1

Betriebsanleitung Seite 2-20
Instruction Manual Page 21-39
Mode d’emploi Page 40-59
Page 2
D
2
Diese Bedienungsanleitung ist Bestandteil des Produktes. Sie beinhaltet wichtige
Informationen und Sicherheitshinweise. Sie ist deshalb jederzeit griffbereit aufzubewahren und beim Verkauf des Produktes an Dritte weiterzugeben. Vor Inbetriebnahme Anleitung lesen. Nur für den vorgesehenen Einsatzbereich ver-
wenden. Stromversorgung ausreichend dimensionieren. Einbauhinweise beachten. Regelmäßig Reichweitentests durchführen. Beachten Sie bitte auch die
erweiterte Anleitung, die Sie mit der WINGSTABI Software auf Ihrem Computer
installiert bekommen.
Die Bewertung des Gerätes erfolgte nach europäisch harmonisierten Richtlinien.
Sie besitzen daher ein Produkt, das hinsichtlich der Konstruktion die Schutzziele
der Europäischen Gemeinschaft zum sicheren Betrieb der Geräte erfüllt.
Die ausführliche CE-Konformitatserklärung nden Sie als PDF-Datei im Internet
bei www.multiplex-rc.de im Bereich DOWNLOADS unter PRODUKT-INFOS.
Inhalt
1. Sicherheitshinweise
1.1. CE-Konformitätserklärung
1. Sicherheitshinweise ............................................................................ 2
1.1. CE-Konformitätserklärung ................................................................... 2
1.2. Gewährleistung/Haftungsausschluss .................................................... 3
1.3. Entsorgung ......................................................................................... 3
2. Produkt- und Funktionsbeschreibung ................................................... 4
3. Lieferumfang ...................................................................................... 5
4. Technische Daten ............................................................................... 6
5. Anschlussbelegung ............................................................................. 8
6. Konguration .................................................................................... 11
7. Installation ....................................................................................... 11
8. Startbildschirm ................................................................................. 12
9. Servoeinstellungen ........................................................................... 13
10. Flugphasen ...................................................................................... 14
11. Empndlichkeitseinstellung ................................................................ 15
12. Wichtiger Hinweis zum ersten Flug ..................................................... 15
13. Übersichtsbildschirm ......................................................................... 16
14. Telemetrie ........................................................................................ 17
15. Optimierung ...................................................................................... 18
16. Binding ............................................................................................ 19
17. Zubehör ............................................................................................ 59
Page 3
D
3
1.2. Gewährleistung/Haftungsausschluss
Elektrogeräte, die mit der durchgestrichenen Mülltonne gekennzeichnet sind,
zur Entsorgung nicht in den Hausmüll geben, sondern einem geeigneten Entsorgungssystem zuführen. In Ländern der EU (Europaische Union) dürfen Elektrogeräte
nicht durch den Haus- bzw. Restmüll entsorgt werden (WEEE - Waste of
Electrical and Electronic Equipment, Richtlinie 2002/96/EG).
Sie können Ihr Altgerät bei öffentlichen Sammelstellen Ihrer Gemeinde bzw.
Ihres Wohnortes (z. B. Recyclinghöfen) kostenlos abgeben. Das Gerät wird dort
für Sie fachgerecht und kostenlos entsorgt. Mit der Rückgabe Ihres Altgerätes
leisten Sie einen wichtigen Beitrag zum Schutz der Umwelt!
Die Firma MULTIPLEX Modellsport GmbH & Co.KG übernimmt keinerlei Haftung
für Verluste, Schäden oder Kosten, die sich aus fehlerhafter Verwendung und
Betrieb ergeben oder in irgendeiner Weise damit zusammenhängen. Soweit
gesetzlich zulässig, ist die Verpichtung der Firma MULTIPLEX Modellsport GmbH
& Co.KG zur Leistung von Schadenersatz, gleich aus welchem Rechtsgrund,
begrenzt auf den Rechnungswert der an dem schadenstiftenden Ereignis unmittelbar beteiligten Warenmenge der Firma MULTIPLEX Modellsport GmbH &
Co.KG. Dies gilt nicht, soweit die MULTIPLEX Modellsport GmbH & Co.KG nach
zwingenden gesetzlichen Vorschriften wegen Vorsatzes oder grober Fahrlässigkeit unbeschränkt haftet.
Für unsere Produkte leisten wir, entsprechend den derzeit geltenden gesetzlichen
Bestimmungen, Gewähr. Wenden Sie sich mit Gewährleistungsfällen an den
Fachhändler, bei dem Sie das Produkt erworben haben.
Von der Gewährleistung ausgeschlossen sind Fehlfunktionen,
die verursacht
wurden durch:
· Unsachgemäßen Betrieb
· Falsche, nicht oder verspätet, oder nicht von einer
autorisierten Stelle durchgeführte Wartung
· Falsche Anschlüsse
· Verwendung von nicht originalem MULTIPLEX/HiTEC-Zubehör
· Veränderungen/Reparaturen, die nicht von MULTIPLEX oder einer
MULTIPLEX-Servicestelle ausgeführt wurden
· Versehentliche oder absichtliche Beschädigungen
· Defekte, die sich aus der normalen Abnutzung ergeben
· Betrieb außerhalb der technischen Spezikationen oder im Zusammenhang
mit Komponenten anderer Hersteller
MULTIPLEX Modellsport GmbH & Co.KG
Westliche Gewerbestraße 1
D-75015 Bretten-Gölshausen
Multiplex/HiTEC Service: +49 (0) 7252 - 5 80 93 33
1.3. Entsorgung
Page 4
D
4
Frei programmierbares 3-Achs-Kreiselsystem für alle RC-Flächenmodelle. Zu
jeder Zeit das perfekte Gefühl über sein Modell zu haben, ist der Traum jedes Piloten. Das WINGSTABI macht das möglich und lässt weder bei Einsteigern noch
bei Pros Wünsche in Sachen Handhabung, Einstellung und Funktion offen.
· Das WINGSTABI macht aus jeder einfachen Fernsteuerung ein
frei programmierbares RC-System
· Empndlichkeit der 3 Achsen getrennt oder gemeinsam
über den Sender einstellbar
· Veränderungsfaktor pro Achse kann variiert werden
· Mit 7 und 9 Kanälen, bei 12 oder 16 Kanal Pro-Version mit
integrierter Akkuweiche
· Für jedes Servo ist die Funktion frei zuordenbar und passt
damit zu jeder Modellanwendung
· Delta-Mischer, V-Leitwerksmischer und Klappenunterstützung
· Klappen können Querruder verstärken
· Echtzeit-Sensordiagramm in der PC-Software
4 Flugphasen:
1. An/Aus
2. Stabilisierung für Fliegen bei Wind
3. Kunstug und 3D-Flug
4. Torquen (Rock´n Roll am Platz)
Darüber hinaus ist das WINGSTABI kompatibel mit allen gängigen RC-Systemen:
Graupner, Futaba, M-LINK, Jeti, HiTEC, Weatronic und weitere. Es unterstützt
folgende Signalarten: PPM, Futaba S.BUS*, MULTIPLEX SRXL, Graupner SUMD
und SUMO, Jeti UDI, JR XBUX Mode B und das S.BUS Signal vieler weiterer
Hersteller, wie z.B. HiTEC und FrSky.
Dank der hochpräzisen 3-Achs MEMS-Sensoren der neusten Generation bleibt
selbst bei extremer Regelung das Fluggefühl realistisch und erweckt nicht den
Eindruck, einen Roboter zu iegen. Die Einbaulage des Design-Gehäuses aus
eloxiertem Flugzeugaluminium im Modell ist beliebig. Unkompliziert und schnell
kann das WINGSTABI per Windows-PC oder über eine APP am Smartphone oder
Tablet programmiert werden.
Funktionsbeschreibung
Heading Hold (HH) ist ein Gyro-stabilisierter Zustand einer oder mehrerer
Achsen, in denen per Auswertung der Gyrosensoren versucht wird, die aktuelle
Fluglage beizubehalten. Das Modell bleibt damit in der zuletzt gesteuerten
Fluglage und muss aktiv in die nächste Fluglage gesteuert werden.
2. Produkt- und Funktionsbeschreibung
Page 5

D
5
3. Lieferumfang
WINGSTABI-7-Channel
· WINGSTABI-7
· Anleitung
· Patchkabel 320 mm
· 2 Klebepads 32 x 52 mm
· USB-PC-Kabel (UNI)
WINGSTABI-12-Channel
· WINGSTABI-12
· Anleitung
· Patchkabel 320 mm
· 4x Dämpfungstülle mit
Schraube und Rohrniete zur
Befestigung im Modell
· USB-PC-Kabel (UNI)
WINGSTABI-9-Channel
· WINGSTABI-9
· Anleitung
· Patchkabel 320 mm
· 2 Klebepads 32 x 52 mm
· USB-PC-Kabel (UNI)
WINGSTABI-16-Channel
· WINGSTABI-16
· Anleitung
· Patchkabel 320 mm
· 4x Dämpfungstülle mit
Schraube und Rohrniete zur
Befestigung im Modell
· USB-PC-Kabel (UNI)
WINGSTABI-RX-7-DR M-LINK
· WINGSTABI-RX-7-DR M-LINK
mit integriertem Empfänger
· 7-Kanal
· Anleitung
· 2 Klebepads 32 x 52 mm
· USB-PC-Kabel (UNI)
WINGSTABI-RX-12-DR pro M-LINK
· WINGSTABI-RX-12-DR pro
M-LINK mit integriertem
Empfänger
· 12-Kanal
· Anleitung
· 4x Dämpfungstülle mit
Schraube und Rohrniete zur
Befestigung im Modell
· USB-PC-Kabel (UNI)
WINGSTABI-RX-9-DR M-LINK
· WINGSTABI-RX-9-DR M-LINK
mit integriertem Empfänger
· 9-Kanal
· Anleitung
· 2 Klebepads 32 x 52 mm
· USB-PC-Kabel (UNI)
WINGSTABI-RX-16-DR pro M-LINK
· WINGSTABI-RX-16-DR pro
M-LINK mit integriertem
Empfänger
· 16-Kanal
· Anleitung
· 4x Dämpfungstülle mit
Schraube und Rohrniete zur
Befestigung im Modell
· USB-PC-Kabel (UNI)
Page 6
D
6
4. Technische Daten
LED Codes WingStabi:
· grün/rot blinkend: Firmwareupdate
· grün blinkend: Systemstart
· rot blinkend: Fehler:
- Keine Konguration vorhanden
- Kein RC-Signal
- Steuerknüppel beim Einschalten des
WINGSTABI bewegt
- Modell beim Einschalten bewegt
- Kritischer Fehler, Hardware defekt
· grün dauer: alles OK, Querruder
zuckt kurz zur Quittierung der
Bereitschaft
WINGSTABI 7/9
Steuerkanäle 7 bzw. 9
Gewicht ohne integrierten
Empfänger
27 g
Gewicht mit integriertem
Empfänger
35 g
Abmessungen
(L x B x H)
ca. 54 x 34 x 15 mm
Betriebsspannung 3,5 bis 9,0 V
Stromversorgung 4 bis 6 Zellen NiXX, 2S LiPo/LiIo
Gewicht ohne integrierten
Empfänger
–20°C bis +55°C
WINGSTABI RX-7/9-DR M-LINK
Empfangssystem M-Link 2,4 GHz
Servo-Kanalzahl 7/9
Antennenlänge 2 x 16 cm
Page 7
D
7
LED Codes WingStabi:
· grün/rot blinkend: Firmwareupdate
· grün blinkend: Systemstart
· rot blinkend: Fehler:
- Keine Konguration vorhanden
- Kein RC-Signal
- Steuerknüppel beim Einschalten des
WINGSTABI bewegt
- Modell beim Einschalten bewegt
- Kritischer Fehler, Hardware defekt
· grün dauer: alles OK, Querruder
zuckt kurz zur Quittierung der
Bereitschaft
WINGSTABI 12/16
Steuerkanäle 12 bzw. 16
Gewicht ohne integrierten
Empfänger
92 g
Gewicht mit integriertem
Empfänger
100 g
Abmessungen (L x B x H) ca. 74 x 58 x 16 mm
Betriebsspannung
6,0 bis 9,0 V, Stromversorgung nur über
die beiden Batterieanschlüsse zulässig.
Stromversorgung 5 Zellen NiXX, 2S LiPo/LiIo/LiFe
Zulässiger
Betriebstemperaturbereich
–20°C bis +55°C
WINGSTABI RX-12/16-DR M-LINK
Empfangssystem M-Link 2,4 GHz
Servo-Kanalzahl 12/16
Antennenlänge 2 x 37 cm
Page 8
D
8
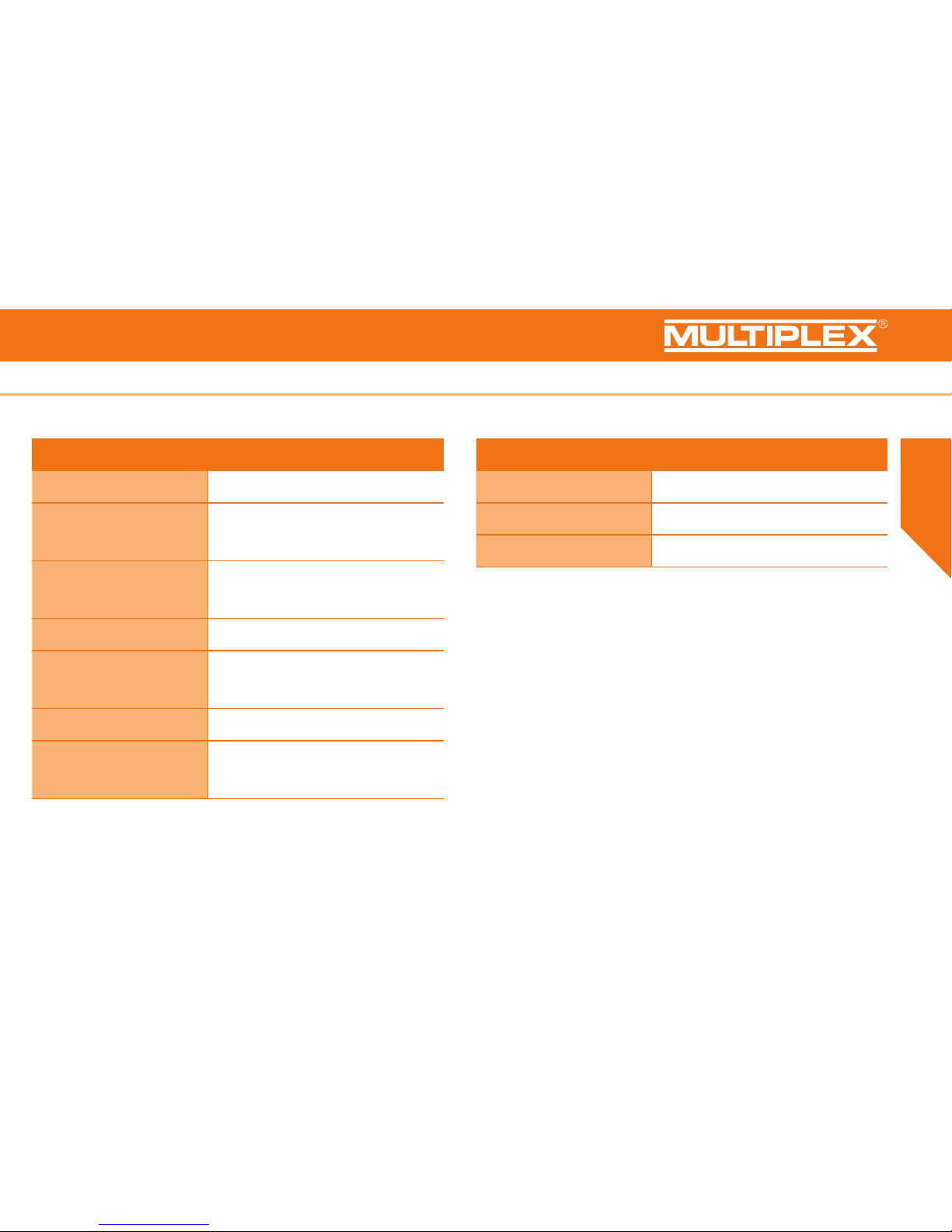
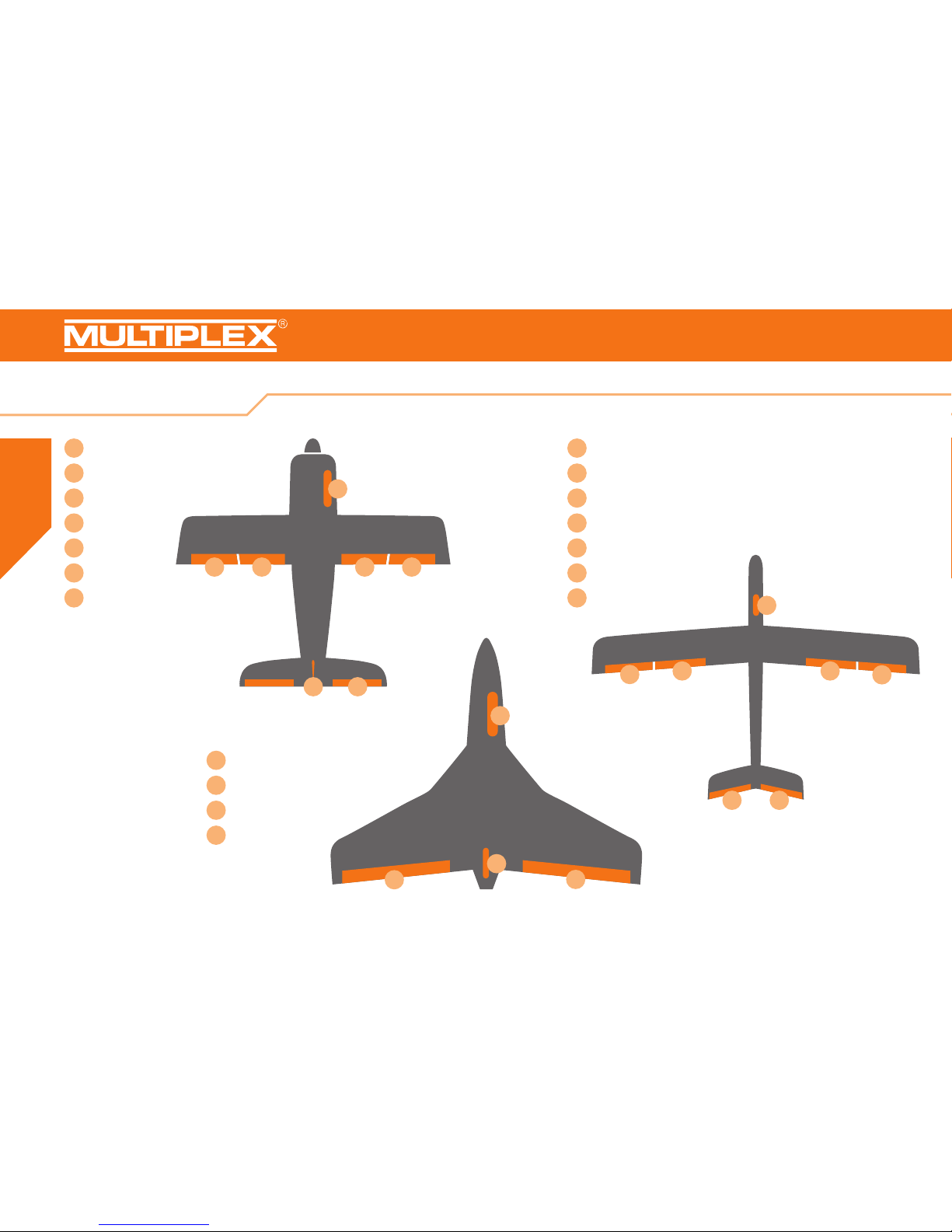
5. Anschlussbelegung
1
Querruder 1
2
Höhenruder
3
Seitenruder
4
Gasausgang
5
Querruder 2
6
Klappe 1
7
Klappe 2
1
Querruder 1
2
V-Leitwerk 1
3
V-Leitwerk 2
4
Gasausgang
5
Querruder 2
6
Klappe 1
7
Klappe 2
1
Querruder 1
2
Querruder 2
3
Seitenruder (optional)
4
Gasausgang
1 6 7 5
4
3 2
4
4
1
6
1
3
2
5
7
2 3
Page 9
D
9
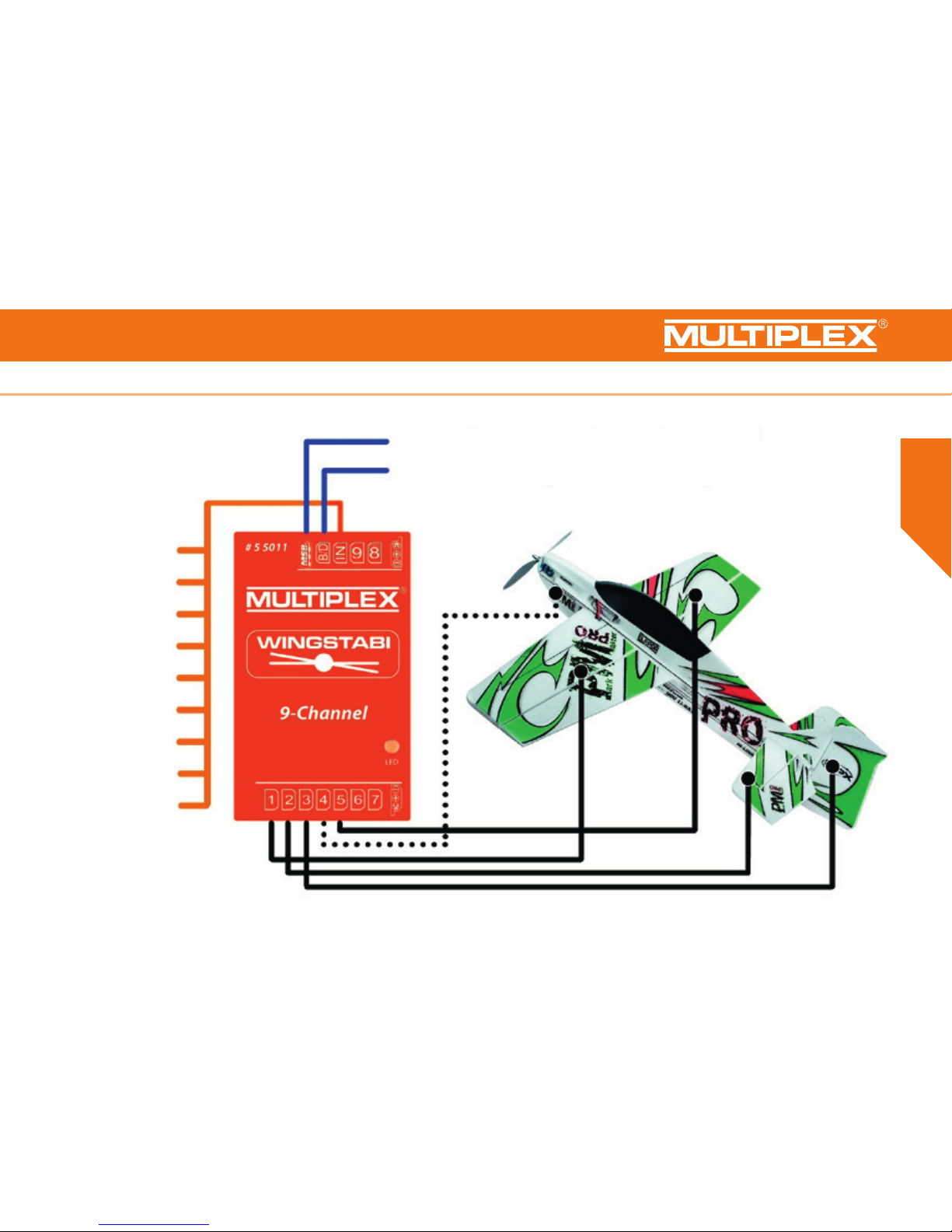
HiTEC SL
PPM
S-BUS
MULTIPLEX SRXL
Graupner SUMD
Graupner SUMO
Jeti UDI
JR XBUS Mode B
Spektrum PPM
MSB (Telemetriedaten-BUS) seriell
Schnittstellen (USB/Bluetooth)
Page 10
D
10
5. Anschlussbelegung
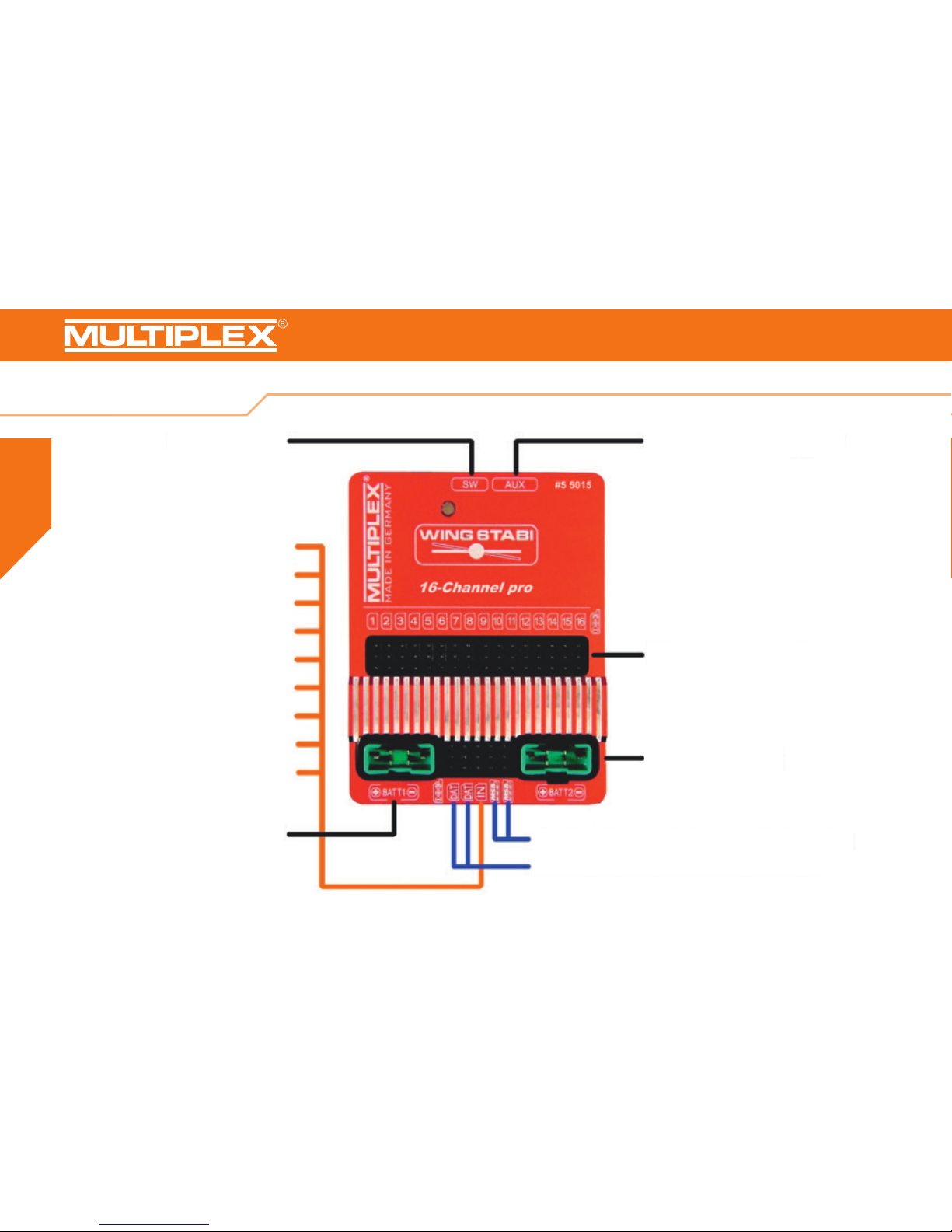
HiTEC SL
PPM
S-BUS
MULTIPLEX SRXL
Graupner SUMD
Graupner SUMO
Jeti UDI
JR XBUS Mode B
Spektrum PPM
Schalter
Batterie 1
Erweiterungen
Servoausgänge
Batterie 2
MSB (Telemetriedaten-BUS) seriell
Schnittstellen (USB/Bluetooth)
Page 11

D
11
6. Konguration
7. Installation
Folgende Schritte sind zum Kongurieren des WINGSTABI nötig:
1. MULTIPLEX Launcher aus dem Downloadbereich der MULTIPLEX Homepage
laden und auf dem PC installieren.
2. Der Treiber des USB PC-Kabel RX+S+Telemetrie (UNI) mit der
Artikelnummer # 8 5149 wird automatisch mit installiert.
3. Software nach der Installation starten.
4. Gegebenenfalls den COM-Port des USB-Kabels manuell auswählen.
In der Regel wird dieser aber automatisch erkannt.
5. Das WINGSTABI an das USB-Kabel mit dem B/D-Anschluss verbinden.
6. WINGSTABI mit Spannungsquelle (4,8 bzw. 6 bis 9 Volt) versorgen.
7. Den Assistenten für die erste Konguration des WINGSTABI nutzen und
Schritt für Schritt durchgehen.
Wird anstelle des USB-PC-Interfaces das optionale Bluetooth-Modul verwendet,
so ist die COM-Schnittstelle nach Ziffer 4 manuell auszuwählen.
Beachten Sie die Blinkcodes des BT-Moduls:
1 Hz: Das Modul ist bereit und wartet auf eine Verbindung
10 Hz: Das Modul ist im Kommandomodus
Dauer: Das Modul ist über BT verbunden
Externe Empfänger anschließen:
Beim WINGSTABI ohne integriertem M-Link Empfänger schließen Sie Ihren eigenen
Empfänger per beiliegenden Patchkabel an den IN Steckplatz am WINGSTABI
an. Ihr Empfänger muss auf die Summensignalausgabe eingestellt werden. Beachten Sie hierzu die Anleitung des jeweiligen Herstellers.
Besitzen Sie ein WINGSTABI RX-7-DR, WINGSTABI RX-9-DR, WINGSTABI RX12-DR pro oder WINGSTABI RX-16-DR pro (mit integriertem Empfänger), ist der
IN Steckplatz ohne Funktion. Es kann kein zweiter Empfänger für den Multiplex
Zwei-Empfänger-Betrieb angeschlossen werden.
Page 12
D
2 63 74 85 91
14
15
16
17 18
19
20
10 11 12
13
12
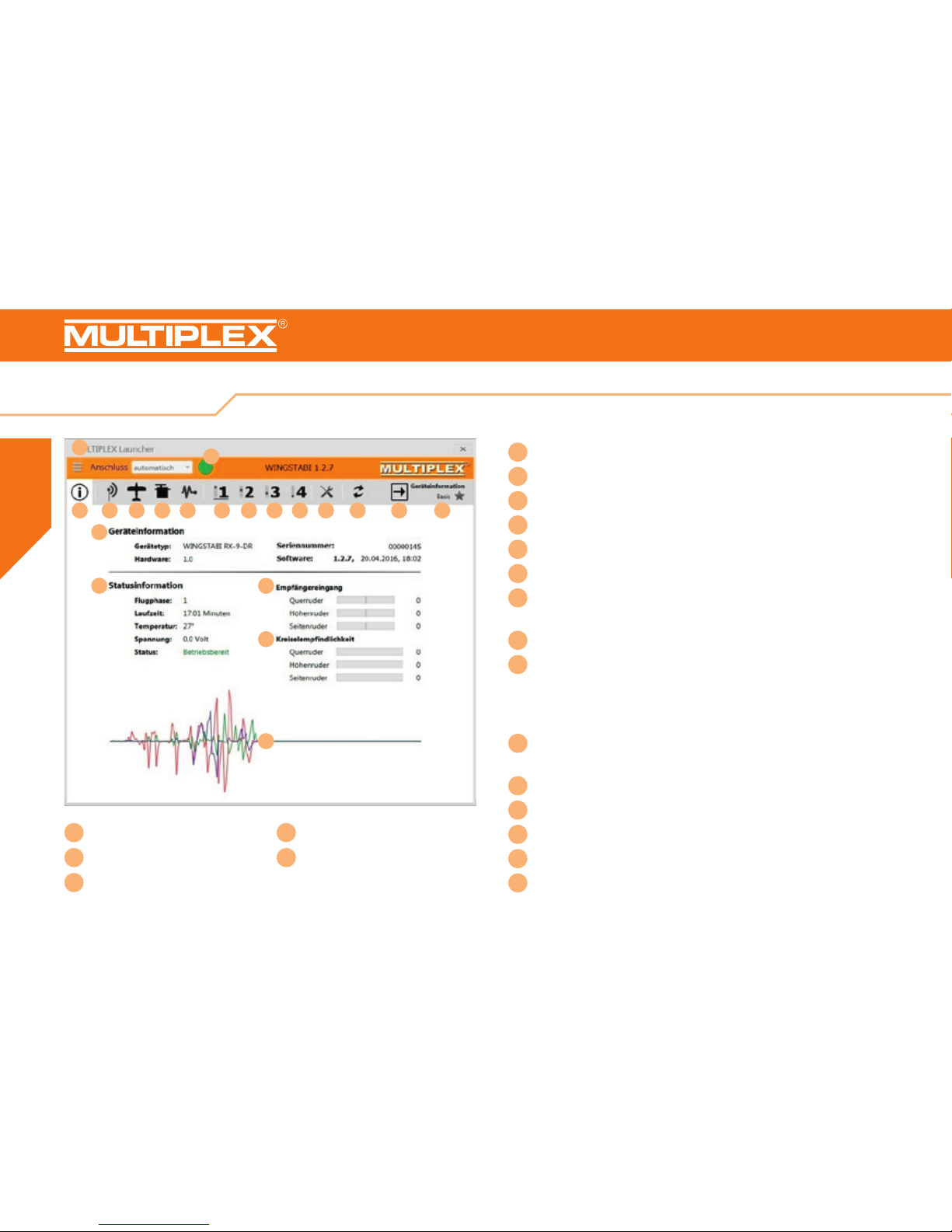
8. Startbildschirm
1
Startbildschirm (Geräteinformation)
2
Empfänger- und Kanalübersicht
3
Flugmodell
4
Servoeinstellungen
5
Sensor
6
Flugzustand 1 (Werte sind per Drag&Drop auf andere Flugzustände übertragbar)
7
Flugzustand 2 (Werte sind per Drag&Drop auf andere Flugzustände übertragbar)
8
Flugzustand 3 (Werte sind per Drag&Drop auf andere Flugzustände übertragbar)
9
Flugzustand 4 (Werte sind per Drag&Drop auf andere Flugzustände übertragbar)
10
Werkzeuge
11
Firmware-Update
12
Übertragung der Einstellung zum WINGSTABI (Symbol blinkt rot,
wenn Übertragung wegen Änderungen der Einstellungen erfolgen muss)
13
Auswahl zwischen Basis- und erweiterten Einstellungen
14
Menü (WINGSTABI neu starten, WINGSTABI auf Werkseinstellung
zurücksetzen, WINGSTABI-Einstellungen importieren,
WINGSTABI-Einstellungen exportieren, Launcher-Einstellungen,
Launcher-Info, Launcher beenden)
15
Auswahl der automatischen Erkennung oder eines voreingestellten
COM-Ports (rot = nicht verbunden, orange = suchend, grün = verbunden)
16
Geräteinformation
17
Statusinformation
18
Empfängereingang
19
Kreiselempndlichkeit
20
Oszilloskop Sensor
Page 13

D
13
9. Servoeinstellungen
Dual Rate und Expo dürfen am Sender wie gewohnt verwendet werden. Servomitte, bzw. Ruderneutralstellung muss zuerst mechanisch
am Modell erfolgen.
!
Der Servoausgang für das Gas sollte nicht umbelegt werden. Hier
besteht die Gefahr eines ungewollten Motoranlaufes bei der Programmierung.
!
Bei allen Servoeinstellungen ist zu beachten, dass diese im WINGSTABI und
nicht am Sender erfolgen. Dabei muss die Trimmung am Sender auf Neutral
bzw. Null stehen. Senderseitige Mischer sind stets zu deaktivieren.
Erweiterte Servozuordnung
Bei Modellen, die mehr Servos verwenden, als auf Seite 8 dieser Anleitung in
den Standard-Anschlussschemen gezeigt, ordnen Sie diese in dem Servofenster zu. Jeder Servoausgang ist in der Funktion frei zuweisbar. Es wird jedoch
empfohlen, die bereits zugeordneten Servos zu belassen.
Page 14
D
14
10. Flugphasen
Das WINGSTABI verfügt über 4 individuell nutzbare Flugphasen.
Flugphase aus (Flugphase 1)
Das WINGSTABI ist aus und leitet die Steuerbefehle direkt vom Sender an die
Servos weiter.
Dämpfungsmodus (Flugphase 2)
Für das allgemeine Fliegen. Äußere Einwirkungen wie z. B. Seitenwind bei Start
und Landung werden minimiert. Wir sprechen hier von einer Art „Windausschalter“.
Volles Heading Hold (Flugphase 3)
Für weiträumigen Kunstug. Dieser Modus ist bei Start und Landung nur bedingt
einsetzbar, bzw. erfordert gewisse Erfahrung beim Fliegen mit dem WINGSTABI.
Strömungsabrisse werden hier vom Piloten oft zu spät wahrgenommen.
Vorteil: Auch bei starkem Wind bleibt das Modell absolut spurtreu.
Die Besonderheit des WINGSTABI dabei ist, dass das Seitenruder speziell optimiert geregelt wird, was für ein natürliches Flugbild des Modells sorgt.
Torquen! (Flugphase 4)
Extremer Heading Hold Modus. Für normales Fliegen ist dieser Modus nahezu
ungeeignet. Das Modell würde sich aufschwingen.
Wie aktiviert man die 4. Flugphase, die in der Standardkonguration nicht
aktiviert wird?
Wechseln Sie in der Software auf das Empfängereinstellfenster „4. Flugphase
zuweisen“. Ein zusätzlicher Kanal mit 2-Stufen-Schalter muss zugeordnet werden.
Dieser Schalter ist übergeordnet und führt dazu, dass bei dessen Betätigung in Flugphase 1 Ihr WINGSTABI ausgeschaltet wird. Der zuvor
zugewiesene 3-Stufen-Schalter für die Flugphasen schaltet nun zwischen den Phasen 2, 3 und 4.
i
Page 15
D
15
11. Empndlichkeitseinstellung
12. Wichtiger Hinweis zum ersten Flug
Grundeinstellungen der WINGSTABI-Regelung
Die von MULTIPLEX gewählten Voreinstellungen für das Regelungsverhalten des
Kreisels sind generell auf der eher sicheren Seite angesiedelt, d. h. die Empndlichkeit ist eher zu gering eingestellt. Bei den meisten Modellen kann die Empndlichkeit deutlich erhöht werden.
Empndlichkeit des Kreisels per Sender einstellen
Zuerst einen Kanal im Empfängereinstellfenster zuweisen. Dann in der jeweiligen Flugphase die Funktion „Empndlichkeit per Sender“ von deaktiviert auf
den gewünschten Wertebereich einstellen. +– 30 für erste Versuche wählen.
Wendigkeit des Modells: Dies betrifft die Drehrate des Modells. Für erste Flüge
empehlt es sich, die Standardwerte zu nutzen.
Vorgehensweise für den ersten Flug mit neu installiertem WINGSTABI im Modell:
· WINGSTABI Wirkrichtungen der einzelnen Achsen kontrollieren
· Steuerrichtungen kontrollieren
· Flugphase 1, Kreisel Aus, wählen und auch beim ersten Flug nicht in andere
Flugphasen wechseln
· Modell starten, schnell auf Sicherheitshöhe steigen
· Trimmung am Sender nutzen, bis das Modell neutral iegt
· Modell landen
· Nach der ersten Landung müssen die getroffenen Trimmwerte per schnellem
Umschalten des Flugphasenschalters an das WINGSTABI übergeben und so
eingelernt werden
· Finale Prüfung des Einlernens der Trimmung
· Umschalten in die Flugphase 3, Heading Hold. Die Ruder dürfen nun nicht
weglaufen bzw. sich von selbst an einen Endausschlag bewegen
Das WINGSTABI ist nun für den ersten Flug mit unterstützender Regelung bereit.
Es empehlt sich, immer in der Flugphase 1 oder 2 zu starten. Gerade bei den
ersten Flügen sollte erst in Sicherheitshöhe in Flugphase 3 oder gar 4 gewechselt
werden.
Dual Rate und Expo dürfen am Sender wie gewohnt verwendet werden.
Servomitte bzw. Ruderneutralstellung muss mechanisch am Modell
erfolgen.
i
4-bis 5-mal den Flugphasenschalter schnell hin und her bewegen. Dabei werden die erogenen Trimmwerte am Sender an das WINGSTABI
als neue Neutrallage eingelernt. Sie können die Trimmwertübernahme
kontrollieren, indem Sie in Flugphase 3 oder 4 schalten. Es darf nun
kein getrimmtes Ruder aus der Neutrallage „weglaufen“.
i
Page 16

D
16
Der Übersichtsbildschirm (siehe auch Seite 12) zeigt die einzelnen Menüpunkte
mit allen voreingestellten Werten. Sie haben die Möglichkeit, die eingestellten
Werte an Ihren persönlichen Flugstil anzupassen.
Dem Einsteiger wird empfohlen, diese Voreinstellungen zumindest für die ersten
Flüge beizubehalten.
Schaltäche importieren:
Hier haben Sie die Möglichkeit, die zuvor über den MULTIPLEX Launcher exportierte Einstellungsdatei auf Ihr WINGSTABI zu importieren. Nach dem Klicken auf
die Schaltäche „Importieren“ öffnet sich automatisch ein Fenster. In diesem
wählen Sie den Speicherort Ihrer WINGSTABI-Dateien und klicken auf „OK“.
Nun importiert der MULTIPLEX Launcher die gewünschte Datei in Ihr WINGSTABI.
13. Übersichtsbildschirm
Page 17

D
17
Das Telemetrie-Menü bietet neben dem Standard „Deaktiviert“ zwei Optionen
für die Datenübertragung per MSB: M-LINK Standard und PROFI-TX sowie Telemetriedisplay. Der M-LINK-Standard ist die korrekte Einstellung für alle Cockpitund Royal-Sender. Pro-TX und Telemetriedisplay bieten erweiterte Darstellungsmöglichkeiten. Die dafür benötigten Sensoradressen sind frei wählbar.
Vermeiden Sie unbedingt Doppelbelegungen. Die Adresse 1 ist standardmäßig
der Übertragungsqualität (LQI) zugeordnet und sollte deshalb nicht anderweitig
vergeben werden.
Multiplex Sensor Bus (MSB)
Das Multiplex Sensor Bus (MSB) System ist eine Entwicklung aus dem Hause
Multiplex. Es erlaubt den Anschluss von hintereinander oder parallel geschalteten Sensoren, welche den MSB unterstützen.
14. Telemetrie
Page 18
D
18
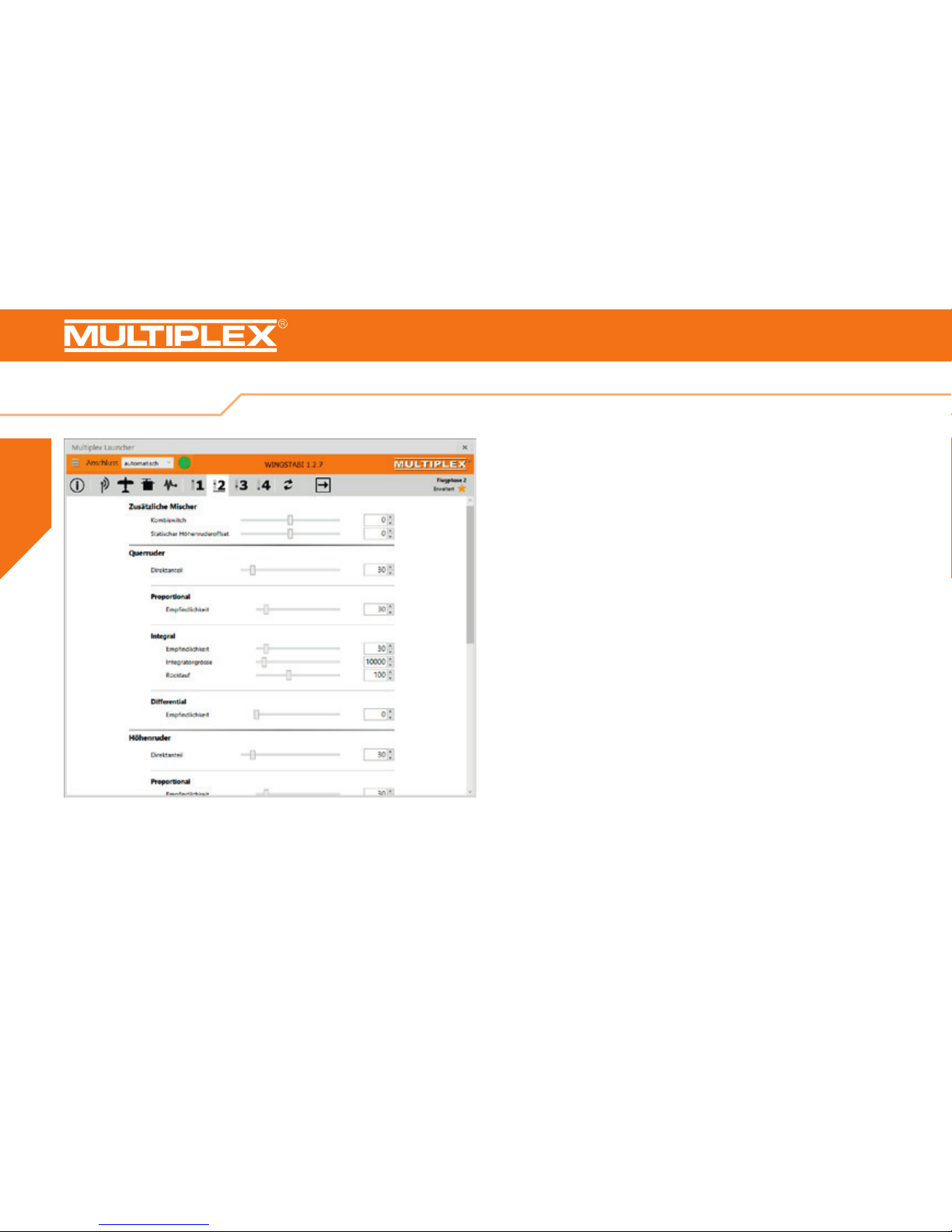
15. Optimierungen
Hat man ein Modell mit den Basis-Einstellungen des Assistenten oder der Modellvorlage erfolgreich eingeogen, kann man – wenn nötig – in den „Erweiterten Einstellungen“ an die Optimierung gehen. Dazu bietet das WINGSTABI alle
seine Voreinstellungen in allen Flugphasen übersichtlich an. Im ersten Schritt
kann man per rechtem Mausklick in der Kopfzeile für jede Phase Standardwerte
für einen reinen Dämpfungsmode, für einen optimierten Dämpfungsmode, für
eine Vollstabilisierung oder gar den Torque-Modus wählen. Schaut man sich
die Unterschiede der Einstellwerte an, erkennt man, was sich hinter den unterschiedlichen Modi verbirgt und kann vorsichtig eigene Änderungen einarbeiten.
Nehmen Sie möglichst wenig Veränderungen vor, um im Testug deren Wirkung
erkennen zu können. Eine schrittweise Optimierung führt schneller zum Erfolg
als zu umfangreiche Änderungen zur gleichen Zeit. Sichern Sie vor jeder Änderung die Einstellungsdatei mit eindeutigem Namen, um stets zu den vorherigen
Einstellungen zurückkehren zu können.
Page 19

D
19
16. Binding
Bei einem WINGSTABI mit integriertem Empfänger muss dieser auf den Sender
eingelernt werden. Dieser Vorgang wird als „Binding“ bezeichnet.
Der Binding-Prozess ist in den folgenden Fällen notwendig:
· Erstmalige Inbetriebnahme des Empfängers
· Nach einem Empfänger-RESET
· Nachdem am Sender die Einstellung bzgl. „Fast Response“ geändert wurde.
Hinweise hierzu entnehmen Sie bitte der Bedienungsanleitung Ihres M-LINK
Senders bzw. M-LINK HF-Moduls
· Nachdem am Sender die Einstellung hinsichtlich des übertragenen Frequenz bereichs geändert wurde. Hinweise hierzu entnehmen Sie der Bedienungs-
anleitung Ihres Senders bzw. M-LINK HF-Moduls („Frankreich-Mode“)
· Wenn der Empfänger mit einem anderen M-LINK Sender betrieben werden soll
Ablauf der Binding-Prozedur
Schritt 1: Zum Binding müssen Sender und Empfänger in den Binding-Mode
gebracht werden:
· Bringen Sie den Sender und die Empfängerantennen in unmittelbare
Nähe zueinander.
· Schalten Sie den Sender im Binding-Modus EIN (siehe Bedienungsanleitung
Ihres M-LINK Senders bzw. M-LINK HF-Moduls).
· Schalten Sie den M-Link Telemetrie Empfänger im Binding-Modus ein:
SET-Taste auf der Oberseite des Empfängers mit Hilfe eines spitzen
Gegenstandes drücken und gedrückt halten.
· Empfänger einschalten bzw. Akku anstecken: Die Binding-Prozedur läuft, die
LED am Empfänger blinkt mit hoher Blinkfrequenz.
· Jetzt die SET-Taste loslassen.
Die Impulsausgabe an den Servoausgängen bleibt während des Binding-Vorgangs ausgeschaltet. Dies bedeutet, die Servos bewegen sich
nicht und sind weich, bei modernen E-Motor-Reglern bleibt der Motor
wegen fehlendem Impuls AUS. Trotzdem bitte das Modell sichern und
einen ausreichenden Sicherheitsabstand einhalten!
i
Bei der ersten Inbetriebnahme des Empfängers oder nach einem RESET startet der Bindingvorgang automatisch, auch wenn die SET-Taste
nicht gedrückt wird.
i
Page 20

D
20
16. Binding
Schritt 2: Nachdem Sender und Empfänger gebunden sind, gehen beide au-
tomatisch in den Normalbetrieb über: Die LED am Empfänger blinkt langsam
Fehlersuche und Fehlerbehebung beim Binding
Fehler:
Die LED des Empfängers blinkt beim Binding-Vorgang auch nach einigen
Sekunden noch mit hoher Frequenz.
Ursache:
Es wird kein ausreichend starkes M-LINK-Signal gefunden.
Fehlerbehebung:
· Verringern Sie den Abstand Ihres Senders zu den Empfängerantennen.
· Stellen Sie sicher, dass Ihr Sender im Binding-Modus eingeschaltet ist.
· Wiederholen Sie den Binding-Vorgang.
LED Codes
LED Code 1
LED ON –> Kein Empfang
LED Code 2
1,6 sec. Binding-Prozess läuft
LED Code 3
1,6 sec. normaler Empfangsbetrieb, keine Fehler
LED Code 5 Quittierungssignal
LED Code 6
1,6 sec. 1 bis 19 Fehler
LED Code 7
1,6 sec. 20 bis 49 Fehler
LED Code 8
1,6 sec. 50 oder mehr Fehler
Die Funktionen der SET-Taste
Wird die SET-Taste auf der Oberseite des Empfängers beim Einschalten gedrückt, startet der Binding-Vorgang. Im Empfangsbetrieb können über die
SET-Taste zwei weitere Funktionen ausgelöst werden. Die Funktionsauswahl
erfolgt über die Dauer des Tastendrucks:
1. Fehlerzähler oder FAIL-SAFE-Stellungen speichern:
SET-Taste 0,5 bis 1 Sekunde drücken.
2. RESET des Empfängers auf Werkseinstellungen:
SET-Taste länger als 10 Sekunden drücken.
Während die SET-Taste gedrückt wird, zeigt die LED Zeitmarken zur Dauer des
Tastendrucks an:
Hinweis: Nach dem Speichervorgang blinkt die LED das Quittierungssignal.
Die Binding-Prozedur dauert in der Regel nur wenige Sekunden.
i
SET-Taste
dauerhaft
drücken für
< 2 Sekunden 2 bis 10 Sekunden > 10 Sekunden
LED AUS EIN AUS
Aufgabe
Fehlerzähler/
FAIL-SAFE
speichern
RESET auf
Werkseinstellungen
Page 21

21
Contents
1. Safety information ............................................................................. 21
1.1. CE declaration of conformity .............................................................. 21
1.2. Guarantee and limitation of liability ..................................................... 22
1.3. Disposal ........................................................................................... 22
2. Product and function description ....................................................... 23
3. Contents .......................................................................................... 24
4. Specication .................................................................................... 25
5. Terminal assignment ......................................................................... 27
6. Conguration .................................................................................... 30
7. Installation ........................................................................................ 30
8. Start screen ...................................................................................... 31
9. Servo settings .................................................................................. 32
10. Flight phases .................................................................................... 33
11. Gain (sensitivity) ................................................................................ 34
12. Important remarks before rst ight ................................................... 34
13. Overview screen ............................................................................... 35
14. Telemetr y ......................................................................................... 36
15. Optimisation ..................................................................................... 37
16. Binding ............................................................................................ 38
17. Accessories ...................................................................................... 59
These operating instructions are part of the product. They contain important
information and safety advice. It should therefore be kept at hand and passed
on when selling the product to third parties. Please read carefully before initial
use. For intended use only.
Use a sufcient power supply dimension. Observe installation instructions. Conduct range tests regularly. Please also note the extended manual that you get
installed with the WINGSTABI software on your computer.
The device was evaluated according to directives harmonized with European
legislation. You are therefore in possession of a product whose construction
satises the protection objectives of the European Community for the safe
operation of devices.
You can nd the exhaustive CE declaration of conformity as a PDF document
on-
line at www.multiplex-rc.de in the DOWNLOADS section under PRODUKT-INFOS.
1. Safety information
1.1. CE declaration of conformity
Page 22

22
1.2. Guarantee and limitation of liability
Electrical and electronic equipment which has the crossed out wheelie bin
symbol should not be disposed along with household waste, but rather via a
suitable disposal system. In countries belonging to the EU (European Union),
electrical or electronic equipment may not be disposed of along with general
household waste (WEEE - Waste of Electrical and Electronic Equipment, Directive
2002/96/EC).
You can dispose of your old equipment at public municipal collection points (e.g.
recycling facilities) free of charge. The equipment will be properly disposed of
free of charge here. By returning your old equipment, you are making a valuable
contribution towards environmental protection!
1.3. Disposal
MULTIPLEX Modellsport GmbH & Co.KG does not assume any liability for loss,
damage or costs which arise through the improper use and operation of our
products, or which are connected with such operation in any way. As far as is
legally permissible, the obligation of MULTIPLEX Modellsport GmbH & Co.KG
to provide compensation for damages, on whatever legal basis, is limited to
the invoice amount of the quantity of MULTIPLEX Modellsport GmbH & Co.KG
goods that were directly affected by whatever incident gave rise to the damage.
This does not apply if MULTIPLEX Modellsport GmbH & Co.KG is obliged to
accept unlimited liability in accordance with mandatory law for deliberate or
gross negligence.
Our products are covered by the currently valid statutory guarantee regulations.
If you wish to make a claim under guarantee, please contact the model shop
where you purchased the product. The guarantee does not cover malfunctions
caused by the following:
· Improper operation
· Maintenance that was performed incorrectly, late or not at all,
or performed by a non-authorized body
· Incorrect connections
· Use of non-original MULTIPLEX accessories
· Modications/repairs that were not carried out by MULTIPLEX or
a MULTIPLEX Service Centre
· Accidental or deliberate damage
· Faults due to normal wear and tear
· Operation outside the technical specications or in connection with
components from other manufacturers.
MULTIPLEX Modellsport GmbH & Co.KG
Westliche Gewerbestraße 1 · D-75015 Bretten-Gölshausen
Multiplex/HiTEC Service: +49 (0) 7252 - 5 80 93 33
Page 23

23
Freely programmable triple-axis gyro system for all RC xed-wing model aircraft. Having complete control over your model at all times is the dream of any
pilot. The WINGSTABI makes this dream achievable, and ticks every possible
box for beginners and pro-standard yers alike in terms of handling, adjustment
and functionality.
· The WINGSTABI makes any simple radio control set into a fully
programmable RC system
· Gain (sensitivity) on all three axes can be varied separately or
jointly from the transmitter
· Variation factor can be set separately for each axis
· 7, 9 channels, or 12, 16 channels Pro versions with integrated battery backer
· The gyro function is freely assignable for each servo,
i.e. the unit caters for every model application
· Delta mixer, V-tail mixer and ap support
· Flaps can be set to amplify aileron response
· Real-time sensor diagram in the PC software
Four ight phases:
1. On/Off
2. Stabilisation for ying in windy conditions
3. Aerobatics and 3D ying
4. Torque-rolling (rock’n’roll at the ying site)
The WINGSTABI is also compatible with all current RC systems:
Graupner, Futaba, M-LINK, Jeti, HiTEC, Weatronic and others.
It supports the following types of signals:
PPM, Futaba S.Bus*, MULTIPLEX SRXL, Graupner SUMD and SUMO, Jeti UDI, JR
XBUX Mode B and S-BUS signal many other systems, such as HiTEC and FrSky.
The latest generation of ultra-precise triple-axis MEMS sensors ensures that the
sensation of ying remains realistic even at extremely high rates of stabilisation,
and the pilot never has the impression of ying a robot. The sleek case, made
of anodised aircraft aluminium, can be installed in any orientation of the model.
The WINGSTABI is straightforward and swift to program using a PC or an APP
with any smartphone or tablet.
Functional description
Heading Hold (HH) is a mode of operation for one or several axes which is
stabilised by means of the gyro, during which signals from the gyro sensors are
evaluated in order to maintain the current ight attitude. The model maintains
the last commanded ight attitude and must be actively commanded into the
next one.
2. Product and function description
Page 24

24
3. Contents
WINGSTABI-7-Channel
· WINGSTABI-7
· Instructions
· 320 mm patch-leads
· 2 x adhesive pad, 32 x 52 mm
· USB-PC-lead (UNI)
WINGSTABI-12-Channel
· WINGSTABI-12
· Instructions
· 320 mm patch-leads
· 4x Grommets with screw and
Mounting Eyelets for attaching
the model
· USB-PC-lead (UNI)
WINGSTABI-9-Channel
· WINGSTABI-9
· Instructions
· 320 mm patch-leads
· 2 x adhesive pad, 32 x 52 mm
· USB-PC-lead (UNI)
WINGSTABI-16-Channel
· WINGSTABI-16
· Instructions
· 320 mm patch-leads
· 4x Grommets with screw and
Mounting Eyelets for attaching
the model
· USB-PC-lead (UNI)
WINGSTABI-RX-7-DR M-LINK
· WINGSTABI-RX-7-DR M-LINK
with integral receiver
· 7-channel
· Instructions
· 2 x adhesive pad, 32 x 52 mm
· USB-PC-lead (UNI)
WINGSTABI-RX-12-DR pro M-LINK
· WINGSTABI-RX-12-DR pro
M-LINK with integral receiver
· 12-channel
· Instructions
· 4x Grommets with screw and
Mounting Eyelets for attaching
the model
· USB-PC-lead (UNI)
WINGSTABI-RX-9-DR M-LINK
· WINGSTABI-RX-9-DR M-LINK
with integral receiver
· 9-channel
· Instructions
· 2 x adhesive pad, 32 x 52 mm
· USB-PC-lead (UNI)
WINGSTABI-RX-16-DR pro M-LINK
· WINGSTABI-RX-16-DR pro
M-LINK with integral receiver
· 16-channel
· Instructions
· 4x Grommets with screw and
Mounting Eyelets for attaching
the model
· USB-PC-lead (UNI)
Page 25

25
4. Specication
WingStabi LED codes:
· ashing green/red: rmware update
· ashing green: system startup
· ashing red: error:
- No conguration available
- No RC signal
- Stick moves when the WingStabi is switched on
- Model moves when switched on
- Critical error, hardware failure
· green continuous: everything OK,
ailerons twitch slightly signaling
they are ready
WINGSTABI 7/9
Channels 7 or 9
Weight excl. integral receiver 27 g
Weight incl. integral receiver 35 g
Dimensions
(L x W x H)
approx. 54 x 34 x 15 mm
Operating voltage 3.5 to 9.0 V
Power supply 4 - 6 NiXX cells, 2S LiPo/Lilo
Operating temperature range –20°C to +55°C
WINGSTABI RX-7/9-DR M-LINK
Receiving system M-Link 2.4 GHz
Servo channel count 7/9
Aerial length 2 x 16 cm
Page 26

26
4. Specication
WingStabi LED codes:
· ashing green/red: rmware update
· ashing green: system startup
· ashing red: error:
- No conguration available
- No RC signal
- Stick moves when the WingStabi is switched on
- Model moves when switched on
- Critical error, hardware failure
· green continuous: everything OK,
ailerons twitch slightly signaling
they are ready
WINGSTABI 12/16
Channels 12 or 16
Weight excl. integral receiver 92 g
Weight incl. integral receiver 100 g
Dimensions
(L x W x H)
approx. 74 x 58 x 16 mm
Operating voltage
6.0 to 9.0 V, Power supply only permitted
by using the two battery terminals.
Power supply 5 NiXX cells, 2S LiPo/Lilo/LiFe
Operating temperature range –20°C to +55°C
WINGSTABI RX-12/16-DR M-LINK
Receiving system M-Link 2.4 GHz
Servo channel count 12/16
Aerial length 2 x 37 cm
Page 27

27
5. Terminal assignment
1
Aileron 1
2
Elevator
3
Rudder
4
Throttle output
5
Aileron 2
6
Flap 1
7
Flap 2
1
Aileron 1
2
V-tail 1
3
V-tail 2
4
Throttle output
5
Aileron 2
6
Flap 1
7
Flap 2
1
Aileron 1
2
Aileron 2
3
Rudder (optional)
4
Throttle output
1 6 7 5
4
3 2
4
4
1
6
1
3
2
5
7
2 3
Page 28

28
HiTEC SL
PPM
S-BUS
MULTIPLEX SRXL
Graupner SUMD
Graupner SUMO
Jeti UDI
JR XBUS Mode B
Spektrum PPM
MSB (telemetry data bus) serial
Interface (USB/bluetooth)
5. Terminal assignment
Page 29

29
HiTEC SL
PPM
S-BUS
MULTIPLEX SRXL
Graupner SUMD
Graupner SUMO
Jeti UDI
JR XBUS Mode B
Spektrum PPM
Switcher
Battery 1
Extensions
Servo outputs
Battery 2
MSB (telemetry data bus) serial
Interface (USB/bluetooth)
Page 30

30
6. Conguration
The following steps are required in order to congure the WINGSTABI:
1. Download the MULTIPLEX Launcher from the download section of the
MULTIPLEX homepage and install it on your PC.
2. The driver for the USB-PC-lead RX+S+Telemetry (UNI) with article number
# 8 5149 will be installed automatically as well.
3. Launch the software after completing the installation.
4. If necessary, manually select the COM-port USB lead.
However, this is usually recognized automatically.
5. Connect the WINGSTABI to the USB lead with the B/D connection.
6. Connect WINGSTABI with power (4.8 or 6 to 9 volts).
7. Use the assistant to congure the WINGSTABI for the rst time and
follow it step by step.
If instead of the USB PC interfaces the optional Bluetooth module is used, please
select the COM port manually by paragraph 4.
Note the blinking codes of the BT-module:
1 Hz: the module is ready and waiting for a connection
10 Hz: The module is in command mode
Duration: The module is connected via BT
7. Installation
Connecting an external receiver:
At WINGSTABI without integrated M-Link receiver connect your own receiver via
enclosed patch cable to the IN slot. Your receiver must be set to the sum signal
output. Please refer to the instructions of the respective manufacturer.
If you are using a WINGSTABI RX-7-DR, WINGSTABI RX-9-DR, WINGSTABI
RX-12-DR pro or WINGSTABI RX-16-DR pro (with integrated receiver) the IN
slot has no function. You could not connect a second receiver for the multiplex
two-receiver mode.
Page 31

2 63 74 85 91
14
15
16
17 18
19
20
10 11 12
13
1
Start screen (device information)
2
Receiver and channel overview
3
Model
4
Servo settings
5
Sensor
6
Flightmode 1 (values can be applied to other ight modes by drag&drop)
7
Flightmode 2 (values can be applied to other ight modes by drag&drop)
8
Flightmode 3 (values can be applied to other ight modes by drag&drop)
9
Flightmode 4 (values can be applied to other ight modes by drag&drop)
10
Tools
11
Firmware update
12
Applying the settings to the WINGSTABI (Symbol ashes red if the settings
must be re-applied because they have changed)
13
Selection between basic and advanced settings
14
Menu (restart WINGSTABI, reset WINGSTABI to default settings,
import WINGSTABI settings, export WINGSTABI settings,
launcher settings, launcher information, end launcher)
15
Selection of the automatic recognition or of a preset COM port
(red = not connected, orange = searching, green = connected)
16
Device information
17
Status information
18
Receiver input
19
Gyro gain
20
Oscilloscope sensor
31
8. Start screen
Page 32

32
9. Servo settings
Dual rate and expo may be used on the transmitter as normal. Servo center or neutral rudder position must be set mechanically on the
model.
!
The servo output for the throttle must not be reassigned. This would
pose a danger of undesired engine start-up during programming.
!
It must be ensured that all servo settings are made on the WINGSTABI and not
the transmitter. The trim on the transmitter must remain neutral or zero. Mixers
must be deactivated at all times at the transmitter.
Advanced servo mapping
For models which use more servos than those shown on page 21 of these instructions in the standard wiring diagrams, map them in the servo window. Each
servo output is freely assignable in its function. It is however recommended that
servos which have already been assigned be left alone.
Page 33

33
10. Flight phases
The WINGSTABI has 4 individually usable ight phases.
Flight phase off (Flight phase 1)
The WINGSTABI is switched off and forwards control commands directly from
the transmitter to the servos.
Damping mode (ight phase 2)
For normal ying. External inuences such as crosswinds and landing are minimized. Here we are referring to a type of “wind canceling” functionality.
Full Heading Hold (Flight phase 3)
For elaborate acrobatics. This mode can only be used to a limited extent during
landing and take-off, as it demands a certain level of experience in ying the
WINGSTABI. Stalls are often detected too late by the pilot here. The advantage
is that the model remains absolutely consistent even with heavy winds. What
makes the WINGSTABI special here is that control over the rudder is specially
optimised, thus ensuring a realistic airborne appearance.
Torque-rolls! (ight phase 4)
Extreme heading hold mode. This mode is unsuitable for normal ying. The
model would soar upwards.
How do you activate the fourth ight phase, which cannot be activated in
the standard conguration?
In the software, switch to the receiver settings window “assign fourth ight
phase”. An additional channel with 2-stage switch must be assigned.
This switch is overriding and switches off your WINGSTABI when pressed
in ight phase 1. The previously assigned 3-stage switch for the ight
phases now switches between phases 2, 3 and 4.
i
Page 34

34
11. Gain (sensitivity)
12. Important remarks before rst ight
Basic settings for WINGSTABI stabilisation
The default settings selected by MULTIPLEX for the stabilising behavior of the
gyro generally tend to err on the safe side, meaning the sensitivity is set rather
low. The sensitivity can be signicantly increased on most models.
Adjusting the sensitivity of the gyro via transmitter
First of all, assign a channel in the receiver window. Then, in the respective
ight phase adjust the “sensitivity via transmitter” function from deactivated to
the desired value range. Select +– 30 when using the device for the rst time.
Agility of the model: Here you can change the rotational speed of the model. For
rst time yers, we recommend using the default settings.
Procedure for the rst ight with the newly installed WINGSTABI in the model:
· Control the WINGSTABI effective directions of the individual axes
· Operate the directional controls
· Select ight phase 1, gyro off, and also do not switch to other ight phases
during the rst ight
· Launch the model and quickly climb to a safe altitude
· Use the trim at the transmitter until the model is in neutral ight
· Land the model
· After the rst landing, the affected trim settings must be transferred to
and thus programmed in the WINGSTABI by quickly toggling the ight
phase switch
· Perform a nal test on the programmed trim settings
· Switch to ight phase 3, heading hold. The rudders must not stray or move
by themselves into end position.
The WINGSTABI is now ready for the rst ight with assisted stabilisation. It is
advisable to always take off in ight phases 1 or 2. Particularly during the early
ights, ight phases 3 and certainly 4 should only be selected at a safe altitude.
Dual rate and expo may be used on the transmitter as normal. Servo
center or neutral rudder position must be set mechanically on the
model.
i
Move the ight phase switch to and for 4 to 5 times quickly. This will
enable the trim settings on the transmitter gained through ying to be
programmed in the WINGSTABI as the neutral position. You can control
the programming of the trim settings by switching to ight phase 3 or
4. It must merely be ensured that the trimmed rudders do not “stray”
out of the neutral position.
i
Page 35

35
The overview screen (see also page 23) displays the individual menu items
with all the default settings. You can adjust the default settings to suit your
personal ying style.
Beginners are advised to leave the default settings unchanged at least for the
rst few ights.
Import function
This enables you to import settings les to your WINGSTABI which have previously been exported using the MULTIPLEX Launcher. When you click the “Import” button, a window opens automatically. Browse for the le path of your
WINGSTABI les and click “OK”. The MULTIPLEX Launcher now imports the
selected le into your WINGSTABI.
13. Overview screen
Page 36

36
As well as the standard “Deactivated” setting, the Telemetry menu gives you two
options for the data transfer via MSB: M-LINK standard and PROFI-TX as well
as Telemetry-Display. The M-LINK standard is the correct setting for all cockpit
and royal transmitters. Pro-TX and telemetry-display provide more advanced
display options. The sensor addresses required for this can be freely selected.
Avoid double assignments at all costs. Address 1 is assigned by default to transmission quality (LQI) and should therefore not be assigned differently.
14. Telemetry
Multiplex Sensor Bus (MSB)
The Multiplex Sensor Bus (MSB) system is a development from Multiplex. It
allows to connect the sensors supporting the MSB in cascades or parallel.
Page 37

37
15. Optimisation
Once you have successfully acquired the basic settings of the assistant or the
mode template through ight, you can – if required – then perform optimizations
in “Advanced settings”. To help you with this, the WINGSTABI clearly displays all
default settings in all ight phases. Start by right clicking the page header for
each phase in order to select the standard settings for purely damping mode, for
an optimised damping mode, for fully stabilised mode or even aerobatics mode.
By looking at the differences in the settings, you can gain a greater insight into
the various modes and carefully work in some changes of your own. The modications should be as minimal in severity and as few in number as possible, so
that they can be recognized during test ights. Step by step optimisation leads
to success more quickly than too many changes at the same time that are too
extreme. Re-save the settings le with a new name after every change, in order
to always have the possibility of returning to the previous settings.
Page 38

38
16. Binding
If you are using a WINGSTABI with an integral receiver, this must be programmed
to the transmitter. This procedure is referred to as “Binding”.
The binding procedure is necessary in the following situations:
· Initial setup of the receiver
· After resetting the receiver
· After the setting relating to “Fast Response” was changed on the transmitter.
You can nd information concerning this from the operating instructions of
your M-LINK transmitter or M-LINK synthesizer RF module
· After the setting for the transmitted frequency range has been changed.
You can nd more information on this in the operating instructions of your
transmitter or M-LINK synthesizer RF module (“France mode”)
· If the receiver is to be operated with a different M-LINK transmitter
Binding procedure
Step 1: In order to bind, the transmitter and receiver must be brought into
binding mode:
· Bring the transmitter and receiver aerials into close proximity with one another.
· Switch ON the transmitter in binding mode
(refer to the operating instructions of your M-LINK transmitter or M-LINK
synthesizer RF module).
· Switch on the M-Link Telemetry Receiver in binding mode:
Press and hold the SET button on the top of the receiver using a sharp object.
· Plug in the receiver/battery: When the binding procedure is running, the
LED on the receiver ashes rapidly.
· Let go of the SET button now.
The pulse output at the servo output sockets remains switched off
during the binding procedure. This means the servos do not move and
are soft; in modern electric motors, the motor remains switched OFF
due to the absence of an impulse. Even so, please secure the model
and maintain an adequate safety distance!
i
When the receiver is used for the rst time or after being reset, the
binding procedure begins automatically, even if the SET button is not
pressed.
i
Page 39

39
Step 2: After the transmitter and the receiver are connected, both switch to
normal operation and the LED on the receiver ashes slowly.
Troubleshooting: Binding
Error:
The LED on the receiver ashes rapidly during the binding procedure and for
several seconds after.
Reason:
Unable to nd an M-LINK signal of sufcient strength.
Solution:
· Reduce the distance between your transmitter and the receiver aerials.
· Ensure that your transmitter is connected in binding mode.
· Repeat the binding procedure.
LED codes
LED code 1
LED ON -> no reception
LED code 2
1.6 sec. -> binding process running
LED code 3
1.6 sec. -> normal receiving mode, no errors
LED code 5 acknowledgment signal
LED code 6
1.6 sec. -> between 1 and 19 errors
LED code 7
1.6 sec. -> between 20 and 49 errors
LED code 8
1.6 sec. -> 50 or more errors
Functions of the SET button
If the SET button on top of the receiver is pressed when being turned on, the
binding procedure begins. In receiving mode, two additional functions can be
triggered using the SET button. Which function is selected depends on how long
the button is pressed:
1. Save error counter or FAIL-SAFE position:
Press the SET button for between 0.5 and 1 second.
2. RESET the receiver to default settings:
Press the SET button for longer than 10 seconds.
While the SET button is being pressed, the LED emits timestamps indicating the
length of time the button has been pressed.
Please note: After saving, the LED emits the acknowledgment signal.
The Binding procedure usually only takes a few seconds.
i
Press and
hold the SET
button for
< 2 seconds
Between 2 and 10
seconds
> 10 seconds
LED: OFF ON OFF
Task:
Save error
counter/FAILSAFE
RESET to
default settings
Page 40

40
Sommaire
Ce manuel d'instruction fait partie du produit. Il comprend des informations
importantes et des consignes de sécurité. Il doit être conservé à un endroit
facilement accessible et sera transmis aux tiers lors de la vente du produit.
Il doit être lu avant la mise en service. Il doit être utilisé exclusivement pour
l'application prévue.
L'alimentation en électricité doit être sufsamment dimensionnée. Respecter
les consignes de montage. Réaliser régulièrement des tests de portée. Le
document papier joint à votre WINGSTABI est le ‘manuel de démarrage rapide’.
La ‘notice complète’ est accessible depuis l’interface du logiciel ‘MPX Launcher’
dès son installation sur votre ordinateur.
L'évaluation de l'appareil a été réalisée selon des directives harmonisées au
plan européen. Vous possédez donc un produit qui, d'un point de vue de la
construction, satisfait aux objectifs de prévention des risques de l'Union euro-
péenne pour la sécurité de fonctionnement des appareils.
Vous trouverez la déclaration de conformité CE complète au format PDF sur le
site internet www.multiplex-rc.de dans la zone DOWNLOADS sous PRODUKT-INFOS.
1. Consignes de sécurité
1.1. Déclaration de conformité CE
1. Consignes de sécurité ....................................................................... 40
1.1. Déclaration de conformité CE ............................................................. 40
1.2. Garantie et exclusion de responsabilité ............................................... 41
1.3. Élimination ........................................................................................ 41
2. Description du produit et de ses fonctions .......................................... 42
3. Contenu de la livraison ...................................................................... 43
4. Caractéristiques techniques ............................................................... 44
5. Affectation des connexions ................................................................ 46
6. Conguration .................................................................................... 49
7. Installation ........................................................................................ 49
8. Écran de démarrage ......................................................................... 50
9. Réglage des servos .......................................................................... 51
10. Phases de vol ................................................................................... 52
11. Réglage de la sensibilité .................................................................... 53
12. Remarque importante relative au premier vol ...................................... 53
13. Écran d‘aperçu général ..................................................................... 54
14. Télémétrie ........................................................................................ 55
15. Optimisations ................................................................................... 56
16. Liaison ............................................................................................. 57
17. Accessoires ...................................................................................... 59
Page 41

41
1.2. Garantie et exclusion de responsabilité
Les appareils électriques portant le symbole de la poubelle rayée, ne doivent
pas être éliminés avec les ordures ménagères, mais doivent être apportés à un
centre de tri approprié. Dans les pays de l'UE (Union européenne), les appa
reils
électriques ne doivent pas être jetés avec les ordures ménagères (WEEE -
Waste
of Electrical and Electronic Equipment, Directive 2002/96/UE).
Vous pouvez déposer gratuitement votre ancien appareil sur les lieux de collecte
publics de votre commune et/ou de votre lieu de résidence (par ex. lieux de
recyclage). L'appareil y sera éliminé gratuitement conformément aux règles en
vigueur. En donnant votre ancien appareil aux lieux de collecte spécialisés, vous
contribuez à la protection de l'environnement !
1.3. Élimination
La société MULTIPLEX Modellsport GmbH & Co.KG décline toute responsabilité en cas de pertes, dommages ou frais résultant de l’utilisation et du
fonctionnement incorrects, ou s’y rapportant de quelque façon que ce soit.
Dans la mesure où la loi le permet, l’obligation de la société MULTIPLEX Modellsport GmbH & Co.KG de verser des dommages et intérêts, pour quelque
raison juridique que ce soit, est limitée à la valeur facturée de la quantité
de marchandises de la société MULTIPLEX Modellsport GmbH & Co.KG, qui
participe directement à l’événement occasionnant les dommages. Cette disposition ne s’applique pas si, en vertu de dispositions légales contraignantes,
la société MULTIPLEX Modellsport GmbH & Co.KG est tenue d’assumer sans
limitation la responsabilité en cas de préméditation ou de négligence grave.
Nous accordons une garantie sur nos produits conformément aux dispositions légales et réglementaires en vigueur. Pour tout recours en garantie,
adressez-vous au revendeur à qui vous avez acheté le produit. Nous accordons une garantie sur nos produits conformément aux dispositions légales
et réglementaires en vigueur.
Pour tout recours en garantie, adressez-vous au revendeur à qui vous avez
acheté le produit.
· Utilisation non conforme à l’usage prévu
· Entretien incorrect, retardé, annulé ou effectué par un organisme non agréé
· Raccordements incorrects
· Utilisation d’accessoires autres que les accessoires MULTIPLEX originaux
· Modications/réparations exécutées par une tierce partie (ni MULTIPLEX
ni un service de maintenance autorisé par MULTIPLEX)
· Dommages accidentels ou intentionnels
· Défauts résultant d’une usure normale
· Utilisation non conforme aux spécications techniques ou associée à des
composants d’autres fabricants
MULTIPLEX Modellsport GmbH & Co.KG
Westliche Gewerbestraße 1 · D-75015 Bretten-Gölshausen
Multiplex/HiTEC Service: +49 (0) 7252 - 5 80 93 33
Page 42

42
Système gyroscopique à 3 axes librement programmable pour tous les modèles
surfaciques RC. Avoir à tout moment la sensation d'une parfaite maîtrise de
son modèle réduit est le rêve de tout pilote. C'est possible avec le WINGSTABI
qui satisfait les souhaits des débutants comme des conrmés en matière de
maniement, réglage et fonctionnement.
· Le WINGSTABI fait de toute commande à distance simple un système RC
librement programmable.
· Sensation des 3 axes réglable séparément ou par l'intermédiaire d'un
émetteur
· Le facteur de variation peut être modié selon les axes.
· 7, 9, 12 ou 16 canaux, versions Pro avec interrupteur de batterie intégré
· Pour chaque servo, la fonction est librement attribuable et convient donc à
tout type de modèles
· Mixage pour ailes Delta, empennage et soutien de volet
· Les volets peuvent renforcer l’aileron
· Diagramme capteur temps réel dans le logiciel PC
4 Phases de vol :
1. Marche/arrêt
2. Stabilisation pour vol par grand vent
3. Vol articiel et vol 3D
4. Couples (Rock'n Roll sur place)
Le WINGSTABI est en outre compatible avec tous les systèmes RC courants :
Graupner, Futaba, M-LINK, Jeti, HiTEC, Weatronic et autres.
Il est compatible avec les types de signaux suivants: PPM, Futaba S.BUS*,
MULTIPLEX SRXL, Graupner SUMD et SUMO, Jeti UDI, JR XBUX Mode B et les
signaux S-BUS de nombreux autres fabricants, tels que HiTEC et FrSky.
Grâce aux capteurs nouvelle génération MEMS 3 axes de haute précision, la
sensation de vol reste réaliste, même avec un réglage extrême et on n'a pas la
sensation de faire voler un robot. La position de montage du boîtier design en
aluminium anodisé de qualité aéronautique dans le modèle est quelconque. Le
WINGSTABI peut être programmé simplement et rapidement pour Windows PC,
sur une App de Smartphone ou sur une tablette.
Description des fonctions
Heading Hold (HH) est un état gyro-stabilisé d'un ou de plusieurs axes qui per-
met de tenter de conserver l'assiette actuelle grâce à l'évaluation de capteurs
gyrostatiques. Le modèle réduit conserve ainsi l'assiette réglée précédemment
et seule une commande active peut modier l'assiette.
2. Description du produit et de ses fonctions
Page 43

43
3. Contenu de la livraison
WINGSTABI-7-Channel
· WINGSTABI-7
· Instruction
· Câble patch 320 mm
· 2 tapis adhésifs 32 x 52 mm
· Câble USB-PC (UNI)
WINGSTABI-12-Channel
· WINGSTABI-12
· Instruction
· Câble patch 320 mm
· 4x amortisseurs avec
oeillet et vis de xation
· Câble USB-PC (UNI)
WINGSTABI-9-Channel
· WINGSTABI-9
· Instruction
· Câble patch 320 mm
· 2 tapis adhésifs 32 x 52 mm
· Câble USB-PC (UNI)
WINGSTABI-16-Channel
· WINGSTABI-16
· Instruction
· Câble patch 320 mm
· 4x amortisseurs avec
oeillet et vis de xation
· Câble USB-PC (UNI)
WINGSTABI-RX-7-DR M-LINK
· WINGSTABI-RX-7-DR M-LINK
avec récepteur intégré
· 7 voie
· Instruction
· 2 tapis adhésifs 32 x 52 mm
· Câble USB-PC (UNI)
WINGSTABI-RX-12-DR pro M-LINK
· WINGSTABI-RX-12-DR pro
M-LINK avec récepteur intégré
· 12 voie
· Instruction
· 4x amortisseurs avec
oeillet et vis de xation
· Câble USB-PC (UNI)
WINGSTABI-RX-9-DR M-LINK
· WINGSTABI-RX-9-DR M-LINK
avec récepteur intégré
· 9 voie
· Instruction
· 2 tapis adhésifs 32 x 52 mm
· Câble USB-PC (UNI)
WINGSTABI-RX-16-DR pro M-LINK
· WINGSTABI-RX-16-DR pro
M-LINK avec récepteur intégré
· 16 voie
· Instruction
· 4x amortisseurs avec
oeillet et vis de xation
· Câble USB-PC (UNI)
Page 44

44
WINGSTABI 7/9
Voies de commande 7 ou 9
Poids sans récepteur intégré 27 g
Poids avec récepteur intégré 35 g
Dimensions
(L x l x h)
Env. 54 x 34 x 15 mm
Tension d’exploitation 3,5 à 9,0 V
Alimentation électrique 4 à 6 cellules NiXX, 2S LiPo/Lilo
Gamme de températures de
fonctionnement autorisée
–20°C à +55°C
WINGSTABI RX-7/9-DR M-LINK
Système de réception M-Link 2,4 GHz
Nombre de voies de servo 7/9
Longueur d’antenne 2 x 16 cm
4. Caractéristiques techniques
Codes LED WingStabi :
· vert/rouge clignotant : mise à jour du
micrologiciel
· vert clignotant : démarrage du système
· rouge clignotant : erreurs :
- Pas de conguration
- Pas de signal RC
- Manche déplacé lors de la mise en marche du WINGSTABI
- Modèle réduit déplacée lors de la mise en marche
- Erreur critique, hardware défectueux
· vert permanent : tout est OK,
l'aileron vibre brièvement
en guise d'acquittement de
fonctionnement
Page 45

45
WINGSTABI 12/16
Voies de commande 12 ou 16
Poids sans récepteur intégré 92 g
Poids avec récepteur intégré 100 g
Dimensions
(L x l x h)
Env. 74 x 58 x 16 mm
Tension d’exploitation
6,0 à 9,0 V, L’alimentation est à privilégier
sur les prises ‘Batterie 1’ ou ‘Batterie 2’.
Alimentation électrique 5 cellules NiXX, 2S LiPo/LiIo/LiFe
Gamme de températures de
fonctionnement autorisée
–20°C bis +55°C
WINGSTABI RX-12/16-DR M-LINK
Système de réception M-Link 2,4 GHz
Nombre de voies de servo 12/16
Longueur d’antenne 2 x 37 cm
Codes LED WingStabi :
· vert/rouge clignotant : mise à jour du
micrologiciel
· vert clignotant : démarrage du système
· rouge clignotant : erreurs :
- Pas de conguration
- Pas de signal RC
- Manche déplacé lors de la mise en marche du WINGSTABI
- Modèle réduit déplacée lors de la mise en marche
- Erreur critique, hardware défectueux
· vert permanent : tout est OK,
l'aileron vibre brièvement
en guise d'acquittement de
fonctionnement
Page 46

46
5. Affectation des connexions
1
Aileron 1
2
Gouverne de profondeur
3
Gouvernail de direction
4
Sortie des gaz
5
Aileron 2
6
Clapet 1
7
Clapet 2
1
Aileron 1
2
Empennage V 1
3
Empennage V 2
4
Sortie des gaz
5
Aileron 2
6
Clapet 1
7
Clapet 2
1
Aileron 1
2
Aileron 2
3
Gouvernail de direction (optionnel)
4
Sortie des gaz
1 6 7 5
4
3 2
4
4
1
6
1
3
2
5
7
2 3
Page 47

47
HiTEC SL
PPM
S-BUS
MULTIPLEX SRXL
Graupner SUMD
Graupner SUMO
Jeti UDI
JR XBUS Mode B
Spektrum PPM
MSB (BUS de données de télémétrie) série
Interfaces (USB/Bluetooth)
Page 48

48
5. Affectation des connexions
HiTEC SL
PPM
S-BUS
MULTIPLEX SRXL
Graupner SUMD
Graupner SUMO
Jeti UDI
JR XBUS Mode B
Spektrum PPM
Interrupteur
Batterie 1
Additif
Sorties servo
Batterie 2
MSB (BUS de données de télémétrie) série
Interfaces (USB/Bluetooth)
Page 49

49
6. Conguration
La conguration du WINGSTABI s'effectue selon les étapes suivantes :
1. Télécharger le MULTIPLEX Launcher à partir du bouton DOWNLOAD de la
page d'accueil du site MULTIPLEX et l'installer sur le PC.
2. Le pilote du câble USB PC RX+S+Télémétrie (UNI) avec le numéro d'article
# 8 5149 s'installe automatiquement.
3. Démarrer le software après l'installation.
4. Choisir éventuellement le port COM du câble USB manuellement.
En règle générale celui-ci est reconnu automatiquement.
5. Relier le WINGSTABI au câble USB avec le raccordement B/D.
6. La source WINGSTABI de courant (4,8 ou 6 à 9 volts).
7. Utiliser l'assistant pour la première conguration du WINGSTABI et
procéder pas à pas.
Si au lieu de l‘USB Interfaces PC le module Bluetooth en option utilisée de sorte
que le port COM est sélectionné manuellement par le paragraphe 4.
Notez les codes clignotants du BT-module :
1 Hz : le module est prêt et en attente d‘une connexion
10 Hz : Le module est en mode commande
Durée : Le module est connecté via BT
7. Installation
Raccordement d’un récepteur externe:
Pour les WINGSTABI sans récepteur M-Link intégrée, branchez votre propre
récepteur à l´aide du cordon fourni (Cordon patch) sur la prise IN du WINGSTABI.
Votre récepteur doit être réglé sur signal de somme numérique. Veuillez consulter
la notice du fabricant de votre récepteur.
Si vous possédez un WINGSTABI RX-7-DR, WINGSTABI RX-9-DR, WINGSTABI
RX-12-DR pro ou WINGSTABI RX-16-DR pro (avec récepteur intégré) la prise IN
n’a pas de fonction. Il n´est pas possible d‘y brancher un deuxième récepteur
MULTIPLEX en mode diversity.
Page 50

50
8. Écran de démarrage
2 63 74 85 91
14
15
16
17
18
19
20
10 11 12
13
1
Écran de démarrage
(Informations sur l’appareil)
2
Récepteur et aperçu des voies
3
Modèle réduit d’avion
4
Réglages des servos
5
Capteur
6
Assiette 1 (Les valeurs sont transposables par Drag&Drop à d’autres assiettes)
7
Assiette 2 (Les valeurs sont transposables par Drag&Drop à d’autres assiettes)
8
Assiette 3 (Les valeurs sont transposables par Drag&Drop à d’autres assiettes)
9
Assiette 4 (Les valeurs sont transposables par Drag&Drop à d’autres assiettes)
10
Outils
11
Mise à jour du micrologiciel
12
Transmission du réglage au WINGSTABI (Le symbole clignote en rouge,
lorsque la transmission doit avoir lieu à la suite des modications des
réglages)
13
Choix entre les réglages de base et les réglages étendus
14
Menu (redémarrer le WINGSTABI, rétablir le réglage d’usine du WINGSTABI
importer les réglages WINGSTABI, exporter les réglages WINGSTABI,
terminer les réglages Launcher, Info-Launcher, Launcher)
15
Choix entre la reconnaissance automatique et un Port COM préréglé
(rouge = non relié, orange = recherche, vert = relié)
16
Information sur l’appareil
17
Information relative au statut
18
Entrée récepteur
19
Sensibilité du gyroscope
20
Capteur de l’oscilloscope
Page 51

51
9. Réglage des servos
Dual Rate et Expo peuvent être utilisés sur l'émetteur comme d'habitude. Sur le modèle réduit, le servo doit être placé mécaniquement
en position intermédiaire et/ou les gouvernes doivent être placées
mécaniquement en position neutre.
!
Il ne faut pas changer l’affectation de la sortie servo des gaz. Cela
pourrait provoquer un démarrage incontrôlé du moteur lors de la programmation.
!
On veillera à ce que tous les réglages de servos s'effectuent sur le WINGSTABI
et non sur l'émetteur. Pour cela, la compensation sur l'émetteur doit être sur le
neutre ou le nul. Les mixages côté émetteur doivent toujours être désactivés.
Affectation élargie des servos
Si un modèle réduit utilise plus de servos que ne le montre le schéma de rac
cordement standard en page 36 de ce manuel, ceux-ci doivent être attribués à la fenêtre des servos. Chaque sortie servo est librement attribuable dans la fonction. Il
est néanmoins recommandé de conserver les attributions des servos déjà réalisées.
Page 52

52
10. Phases de vol
Le WINGSTABI dispose de 4 phases de vol utilisables individuellement.
Phase de vol à l'arrêt (Phase de vol 1)
Le WINDSTABI est à l'arrêt et transmet les ordres de commande directement
aux servos.
Mode d'amortissement (Phase de vol 2)
Pour les vols en général. Les effets extérieurs tels que le vent latéral au démarrage et à l'atterrissage sont minimisés. Nous parlons ici d'une sorte "d'éliminateur de vent".
Heading Hold complet (Phase de vol 3)
Pour le vol acrobatique sur de grandes distances. Ce mode n'est utilisable que
sous condition au démarrage et à l'atterrissage et requiert une certaine expérience du WINGSTABI. Les décrochages sont ici souvent perçus trop tard par
le pilote.
Avantage : même par vent fort, le modèle réduit conserve une stabilité directionnelle parfaite.
La particularité du WINGSTABI réside ici dans le fait que le gouvernail de direction est réglé de manière optimale, ce qui permet un comportement en vol très
naturel du modèle réduit.
Couples ! (Phase de vol 4)
Mode Heading Hold extrême. Ce mode n'est pas vraiment approprié pour les
vols classiques. Le modèle réduit prendrait très vite de l'altitude.
Comment activer la 4e phase de vol, désactivée dans la conguration
standard ?
Dans le logiciel, passer sur la fenêtre de réglage du récepteur "Attribuer la
4e phase de vol". Une voie supplémentaire avec commutateur 2 niveaux doit
être attribuée.
Ce commutateur est prioritaire et si on le manipule en phase 1, le
WINGSTABI se déconnecte. Le commutateur 3 niveaux attribué auparavant se connecte maintenant entre les phases de vol 2, 3 et 4.
i
Page 53

53
11. Réglage de la sensibilité
12. Remarque importante relative au premier vol
Réglages de base de la régulation WINGSTABI
Les préréglages sélectionnés par MULTIPLEX pour le comportement de régulation du gyroscope sont en général prévus pour assurer une très grande sécurité,
en d'autres termes la sensibilité est réglée à un niveau trop faible. Sur la plupart
des modèles réduits, la sensibilité peut être nettement augmentée.
Régler la sensibilité du gyroscope à l'aide de l'émetteur.
Attribuer d'abord une voie à la fenêtre de réglage du récepteur. Puis, pour
chaque phase de vol, régler la fonction "Sensibilité par émetteur" en annulant
"Désactivé" pour choisir la plage de valeurs souhaitée. Choisir +– 30 pour les
premiers essais.
Manœuvrabilité du modèle réduit : Ceci concerne la vitesse de rotation du
moteur du modèle réduit. Pour les premiers vols, il est conseillé d'utiliser les
valeurs standards.
Dual Rate et Expo peuvent être utilisés sur l'émetteur comme d'habitude. Sur le modèle réduit, le servo doit être placé mécaniquement
en position intermédiaire et/ou les gouvernes doivent être placées
mécaniquement en position neutre.
i
Déplacer rapidement le commutateur de phase de vol 4 à 5 fois
d'avant en arrière. Ainsi, les valeurs de compensation sur l'émetteur
sont programmées sur le WINGSTABI comme nouvelle position neutre.
Il est possible de contrôler la prise en charge des valeurs de compensation en connectant la phase de vol 3 ou 4. Mais il ne faut pas que les
gouvernes compensées "dérivent" vers la position neutre.
i
Procédure à suivre pour un premier vol avec le WINGSTABI nouvellement installé :
· Contrôler les directions de circulation du WINGSTABI pour chaque axe.
· Contrôler les commandes de direction
· Sélectionner phase de vol 1, gyroscope à l'arrêt, et même pendant le
premier vol, ne pas changer de phase de vol
· Démarrer le modèle réduit et le faire monter à une altitude de sécurité.
· Utiliser le compensateur sur l'émetteur jusqu'à ce que le modèle réduit vole
en position neutre.
· Faire atterrir le modèle réduit
· Après le premier atterrissage, il convient de transmettre les valeurs de
compensation atteintes en connectant rapidement le commutateur de
phases de vol sur le WINGSTABI pour qu'il les enregistre.
· Contrôle nal des mises en mémoire de la compensation
· Passer à la phase de vol 3 Heading Hold. Les gouvernes ne doivent pas
dériver ni se placer d'elles-mêmes en butée nale.
Le WINGSTABI est maintenant prêt pour son premier vol avec régulation ren-
forcée. Il est recommandé de démarrer toujours en phase de vol 1 ou 2. C'est
précisément lors des premiers vols qu'il ne faut passer à la phase 3 ou 4 que
lorsque le modèle est parvenu à une altitude de sécurité.
Page 54

54
L'écran d'aperçu général (voir aussi page 38) montre les différents points du
menu avec toutes les valeurs préréglées. Vous avez la possibilité d'adapter ces
valeurs à votre style personnel de vol.
Il est recommandé au débutant de conserver ces valeurs préenregistrées au
moins pour les premiers vols.
Importation des boutons de commande :
Vous avez ici la possibilité d'importer sur votre WINGSTABI les données de réglage
exportées précédemment par l'intermédiaire du MULTIPLEX Launcher. Cliquer sur
le bouton "Importer", une fenêtre s'ouvre automatiquement. Dans cette fenêtre,
choisissez le lieu de mémorisation de vos données WINGSTABI et cliquez sur OK.
Le MULTIPLEX Launcher importe maintenant les données souhaitées dans le
WINGSTABI.
13. Écran d'aperçu général
Page 55

55
Le menu Télémétrie offre, en plus du standard "Désactivé" deux options de
transmission de données par MSB : M-LINK Standard et PROFI-TX, ainsi que
Telemetriedisplay. M-LINK-Standard est le réglage qui convient à tous les émetteurs Cockpit et Royal. Pro-TX et Telemetriedisplay proposent des possibilités de présentation étendues. Il est possible de choisir librement les adresses
d'émetteurs nécessaires. Évitez absolument les affectations doubles. L'adresse
1 est attribuée de manière standard à la qualité de transmission (LQI) et ne doit
donc pas être attribuée autrement.
14. Télémétrie
Multiplex Sensor Bus (MSB)
Le système Multiplex Sensor Bus (MSB) est un développement de Multiplex.
Il permet de brancher des capteurs compatibles MSB connectés en série ou
en parallèle.
Page 56

56
15. Optimisations
Si l'on a réussi à faire voler un modèle réduit avec les réglages de base ou avec
les réglages d'origine, on peut aller - si on le souhaite - dans le chapitre "Réglages étendus" pour optimiser les performances du modèle réduit. Pour cela,
le WINGSTABI propose de manière claire tous les préréglages dans toutes les
phases de vol. Dans un premier temps, on peut, avec un clic droit dans l'en-tête,
sélectionner pour chaque phase des valeurs standards pour un simple mode
d'amortissement, un mode d'amortissement optimisé, une pleine stabilisation
ou même un mode couple de torsion. Si l'on regarde de près les différences
entre les valeurs de réglage, on voit ce qui se cache derrière les différents
modes et l'on peut, avec prudence, entrer ses propres modications. Apportez
le moins de modications possibles pour en connaître les effets lors d'un vol
d'essai. Une optimisation par étapes a plus de chances de réussir qu'un grand
nombre de modications effectuées en une seule fois. Avant chaque modication, s'assurer que l'on donne un nom précis aux données de réglage pour
pouvoir toujours revenir aux réglages précédents.
Page 57

57
Si le WINGSTABI a un récepteur intégré, ce dernier doit être programmé sur
l'émetteur. Cette procédure est appelée liaison ("Binding").
La liaison est nécessaire dans les cas suivants :
· A la première mise en service du récepteur
· Après la réinitialisation du récepteur
· Après avoir apporté une modication au réglage et/ou au "Fast Response"
de l'émetteur. Pour plus d'informations sur cette manipulation, se reporter au
mode d'emploi de l'émetteur M-LINK et/ou du module M-LINK-HF.
· Après avoir modié le réglage de l'émetteur relatif à la plage de fréquences
transmises. Pour plus d'informations sur cette manipulation, se reporter au
mode d'emploi de l'émetteur et/ou du module M-LINK-HF ("Mode France").
· Si le récepteur doit fonctionner avec un autre émetteur M-LINK
Déroulement de la procédure de liaison
Étape 1 : Pour réaliser la liaison, émetteur et récepteur doivent être en mode
liaison :
· Placer l'émetteur et les antennes du récepteur à proximité les uns des autres.
· Connecter l'émetteur en mode liaison MARCHE (voir Mode d'emploi de
l'émetteur M-LINK et/ou du module M-LINK HF.
· Connecter le récepteur télémétrique M-Link en mode liaison :
Enfoncer et maintenir enfoncé le touche SET sur la face supérieure du
récepteur à l'aide d'un objet pointu.
· Brancher le récepteur et/ou mettre la batterie en marche :
La procédure de liaison s'effectue et le LED sur le récepteur clignote à une
fréquence élevée.
· Relâcher maintenant la touche SET.
16. Liaison
Les sorties servo n'émettent pas d'impulsions durant la procédure de
liaison. Cela signie que les servos ne bougent pas et restent souples ;
sur les régulateurs de moteurs électriques, le moteur reste à l'ARRET
en raison de l'absence d'impulsions. Néanmoins, ne prenez pas le
risque d'endommager le modèle réduit et restez à une distance de
sécurité sufsante !
i
Lors de la première mise en service du récepteur ou après une réinitialisation, la procédure de liaison démarre automatiquement, même
lorsque la touche SET n'est pas enfoncée.
i
Page 58

58
16. Liaison
Étape 2 :
Une fois que l'émetteur et le récepteur sont reliés, ils passent tous les deux
automatiquement en fonctionnement normal : La LED du récepteur clignote lentement.
Recherche d'erreurs et dépannage lors de la liaison
Erreur :
La LED du récepteur clignote lors de la procédure de liaison, puis quelques
secondes encore à une fréquence plus élevée.
Cause :
Aucun signal M-LINK sufsamment fort n'a été détecté.
Dépannage :
· Réduisez la distance entre l'émetteur et les antennes du récepteur.
· Assurez-vous que l'émetteur est connecté en mode liaison.
· Recommencez la procédure de liaison.
Codes LED
Code LED 1
LED ON –> Pas de réception
Code LED 2
1,6 s, la procédure de liaison s'effectue
Code LED 3
1,6 s
, fonctionnement de réception normal, pas d'erreur
Code LED 5 Signal d'acquittement
Code LED 6
1,6 s, 1 à 19 erreurs
Code LED 7
1,6 s, 20 à 49 erreurs
Code LED 8
1,6 s, 50 erreurs ou plus
Fonctions de la touche SET
La procédure de liaison commence lorsque l'on appuie sur la touche SET située
sur la partie supérieure du récepteur. En fonctionnement réception, la touche
SET peut déclencher deux autres fonctions. Le choix des fonctions s'effectue
selon la durée d'enfoncement de la touche :
1. Mémorisation du compteur d'erreurs ou des positions FAIL-SAFE :
Appuyez sur la touche SET 0,5 à 1 seconde.
2. Réinitialisation des réglages d'usine du récepteur :
Appuyez sur la touche SET plus de 10 secondes.
Alors que la touche SET est enfoncée, la LED indique les marqueurs de temps
pour la durée d'enfoncement de la touche :
Remarque: Après le processus de mémorisation, la LED clignote en guise de
signal d'acquittement.
La procédure de liaison ne dure en général que quelques secondes.
i
Maintenir la
touche SET
enfoncée
durant
< 2 secondes 2 à 10 secondes > 10 secondes
LED ARRÊT MARCHE ARRÊT
Tâche
Compteur
d'erreurs/
Mémoriser
FAIL-SAFE
Touche RESET vers
le haut Réglages
usine
Page 59

# 8 5194
Klebepad für WINGSTABI 7/9
Adhesive pad for WINGSTABI 7/9 · Tapis adhésifs pour WINGSTABI 7/9
# 8 5195
Mechanischer Ein/Aus-Schalter
Mechanical on/off switch · Interrupteur mécanique on/off
# 4 5188
Bluetooth-Modul
Bluetooth module · Module Bluetooth
# 8 5196
Magnetischer Schalter
Magnetic switch · Interrupteur magnétique
59
17. Zubehör · Accessories · Accessoires
Optionales Zubehör · Optional accessories ·
Accessoires optionnels
Optionales Zubehör · Optional accessories ·
Accessoires optionnels
# 8 5195
Page 60

MULTIPLEX Modellsport GmbH & Co.KG · Westliche Gewerbestr. 1 · 75015 Bretten · Germany
www.multiplex-rc.de
V1.2.7 # 9855352
 Loading...
Loading...